T2.1 - Andres Iborra
Anuncio

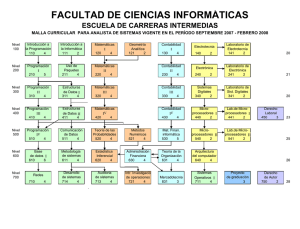
Tema 2. Microprocesadores, Memorias y Microcontroladores Andrés Iborra García Departamento de Tecnología Electrónica Sep@embre 2012 Índice Índice 1. Microprocesadores. 1.1. Conceptos generales. 1.2. Clasificación según arquitecturas. 1.3. Clasificación según conjunto de instrucciones. 1.4. Programación. 1.5. Encapsulado. 2. Memorias. 2.1 Conceptos generales. 2.2 Tipos de memorias. 2.3 Memorias RAM. 2.3.1 RAM Está@ca. 2.3.2 RAM Dinámica. 2.4 Memorias ROM. 2.5 Memorias FLASH. Electrónica Industrial 2 Índice Índice 3. Microcontroladores. 3.1 Conceptos generales. 3.2 Aplicaciones. 3.3 Fabricantes. 3.4 Conexiones básicas de un μC. 3.5 Elementos internos de un μC. 3.6 Arquitectura interna de un μC. 3.7 ATmega328. 3.8 Otros componentes u@lizados con los μC. 3.9 Ejemplos de aplicación. 4. Arduino. 4.1 Conceptos generales. 4.2 Placas Arduino. 4.3 Arduino Uno. 4.4 Entradas/Salidas Arduino Uno. 4.5 El entorno de desarrollo Arduino. Electrónica Industrial 4.6 El lenguaje de programación. 3 Microprocesadores Sistemas mecánico ACTUADORES • Solenoides, relés, piezoeléctricos • Motores de con@nua • Motores paso a paso • Servomotores • Disposi@vos hidráulicos y neumá@cos. VISUALIZADORES • LEDs • Displays • LCD • CRT • TFT Electrónica Industrial SENSORES • Interruptores • Pulsadores • Potenciómetros • LDRs • Fotocélulas • Encoders • Galgas extensom • Termopares • Acelerómetros • MEMs ACONDICIONADORES DE SEÑALES DE SALIDA E INTERFACES • D/A • Transistores • Amplificadores • PWM ACONDICIONADORES DE SEÑALES DE ENTRADA E INTERFACES • C. discretos • Filtros • Amplificadores • A/D SISTEMAS DE CONTROL DIGITAL • Combinacionales • Memorias • Secuenciales • SoC • μP • Comunicaciones • μC • Soaware 4 Microprocesadores Conceptos generales Los circuitos combinacionales y secuenciales son adecuados en diseños sencillos que no requieren cambios de funcionalidad frecuentes. En aquellos sistemas mecatrónicos en los que sea necesario cambios de funcionalidad frecuentes, e impliquen relaciones complejas entre entradas y salidas suele ser mucho más prác@co desarrollar soluciones basadas en el empleo de soaware, el cual corre sobre microprocesadores, microcontroladores, SOC, etc. • Un microprocesador es un circuito integrado a muy gran escala de integración (VLSI) que con@ene muchos circuitos digitales (combinacionales y secuenciales) que realizan funciones aritmé@cas, lógicas, de comunicación y control. • Cuando un microprocesador se empaca en una tarjeta de circuito impreso (PCB) con otros componentes (oscilador, puertos de entrada salida, latches, memorias, etc).el resultado es una microcomputadora • Los microprocesadores son disposi@vos digitales diseñados para manipular información. Tienen 3 buses: • Datos: Con@ene el flujo de información • Direcciones: Controla la posición actual en memoria • Control: Regula el flujo de información . Se pueden clasificar según la arquitectura hardware del sistema microcomputador al que van des@nados (Von Neuman y Harvard) y según las caracterís@cas del conjunto de instrucciones del mismo (CISC y RISC) • Electrónica Industrial 5 Clasificación según arquitecturas (I) Microprocesadores Micros para computadoras con arquitectura Von Neuman • • • La arquitectura Von Neuman es una arquitectura de computadora que u@lizan el mismo disposi@vo de almacenamiento tanto para las instrucciones como para los datos. El μP trabaja como CPU en modo secuencial. Lee una instrucción de la memoria, la decodifica, busca operandos, ejecuta la instrucción y almacena el resultado. Para ello el μP cuenta con una serie de registros internos y una ALU. Generalmente se combina con un conjunto de instrucciones @po CISC. μP Acumulador Contador de programa CPU Memoria Entradas y Salidas Bus de Control ALU Unidad de control Bus de Direcciones Bus de Datos Electrónica Industrial BUS DEL SISTEMA Registros 6 Clasificación según arquitecturas (I) Microprocesadores Micros para computadoras con arquitectura Von Neuman. Arquitectura interna Bus de Datos BIU Bus Interno Bus de Direcciones Bus de Control Unidad de Control Registro de Banderas Electrónica Industrial Unidad Aritmé@ca Lógica Registros de Uso General 7 Clasificación según arquitecturas (I) Microprocesadores Micros para computadoras con arquitectura Harvard • • • • Las computadoras con arquitectura Harvard u@lizan disposi@vos de almacenamiento msicamente separados para las instrucciones y para los datos (en oposición a la Arquitectura de von Neumann).. Lo anterior permite leer instrucciones con mayor velocidad Pueden direccionar altas can@dades de memoria. Se combinan con soaware RISC. Memoria de Datos Electrónica Industrial CPU Memoria de Programa 8 Microprocesadores Clasificación según conjunto de instrucciones (I) CISC (Complex Instruc@on Set Computer) • • • • • Conjunto de instrucciones grande. Ofrece una amplia gama de operaciones. Facilita el trabajo de programación. Reduce el tamaño del código de programa. Incrementa el coste de aprender la programación. RISC (Reduced Instruc@on Set Computer) • • • Pocas instrucciones Más fácil de aprender el método de programación Mayor tamaño del código de programa. Electrónica Industrial 9 Programación Microprocesadores • El microprocesador no @ene memoria interna Se debe conectar con una memoria externa que contenga el programa El programa se guarda como datos en la memoria, un dato leído puede ser información o un código de operación El procesador lee de manera ordenada cada punto de la memoria del programa μP Memoria Bus de Control Bus de Direcciones Bus de Datos Electrónica Industrial Entradas y Salidas BUS DEL SISTEMA • • • 10 Encapsulado Microprocesadores Intel 4004 Zilog Z80 Motorola 68000 Intel 80486DX2 Electrónica Industrial 11 Dr. Andrés Iborra Universidad Politécnica de Cartagena Campus Muralla del Mar, s/n 30202 Cartagena Tel. Fax. E-­‐mail Twiyer Lista de correo Www +34 968 32 56 54 +34 968 32 53 45 [email protected] @CincubatorHUB @aiborra cloud-­‐[email protected] www.cincubator.com