RESUMEN TEORÍA: Funciones de varias variables
Anuncio

Matemáticas
1
1
RESUMEN TEORÍA:
Funciones de varias variables
Elena Álvarez Sáiz
Dpto. Matemática Aplicada y C. Computación
Universidad de Cantabria
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
Objetivos
1.
Comprensión del concepto de límite, continuidad y diferenciabilidad de una
función de dos variables.
2.
Conocimiento del concepto de derivada parcial de una función de dos
variables y comprensión de su interpretación geométrica.
3.
Destreza en el cálculo de derivadas y diferenciales.
Contenidos
1.
Derivadas direccionales. Derivadas parciales.
2.
Diferencial. Regla de la cadena y derivación implícita.
3.
Gradiente. Plano tangente.
4.
Extremos de funciones de varias variables.
Ejemplos de funciones de varias variables
•
Dados dos números cualesquiera x e y, su media aritmética es el número
x +y
. En general si se tienen n
2
x + x 2 + ... + x n
números su media aritmética es: f ( x1, x 2 ,..., xn ) = 1
n
comprendido entre ambos es decir f ( x , y ) =
•
Dados dos números positivos x e y, su media geométrica es el número
comprendido entre ambos es decir f ( x, y ) = xy . En general si se tienen n
números su media geométrica es: f ( x1, x 2 ,..., x n ) = n x1x 2 ...x n
•
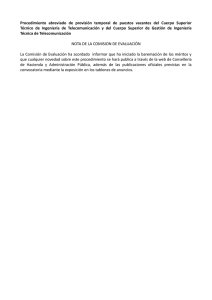
Un sistema de fiabilidad (o bien en circuitos eléctricos) funciona (la corriente
pasa) si hay algún camino activado para ir des el principio (A) hasta el final
(B) del sistema (circuito). Así pues, en una estructura en serie como ésta:
La función de varias variables que describe el sistema es: f ( x1, x 2 , x 3 , x 4 ) = x1x 2x 3x 4 ,
donde el componente i funciona si x i = 1 y no lo hace si x i = 0 . De este modo, el
2
Profesora: Elena Álvarez Sáiz
Ingeniería de Telecomunicación
Teoría: Funciones varias variables
Fundamentos Matemáticos I
sistema
funciona
si
los
cuatro
componentes
lo
hacen
es
decir,
si
x1 = x 2 = x 3 = x 4 = 1 . En caso de que alguno de los componentes no funcione x i = 0
la corriente no pasa de A a B.
Un sistema paralelo como por ejemplo:
Se puede describir mediante la función de varias variables:
f ( x1, x 2 , x 3 .x 4 .x 5 ) = 1 − ( 1 − x1 )( 1 − x 2 )( 1 − x 3 )( 1 − x 4 )
•
Un sistema estéreo hi-fi tiene los cinco componentes que presentamos a
continuación: (1) amplificador, (2) sintonizador de FM, (3) sintetizador de
onda media, (4) altavoz A y (5) altavoz B. Se considera que el sistema
funciona si podemos obtener sonido por medio de la FM o bien mediante la
onda media. La función que modeliza este sistema es:
f ( x1, x 2 , x 3 .x 4 .x 5 ) = x1 1 − ( 1 − x 2 )( 1 − x 3 ) 1 − ( 1 − x 4 )( 1 − x 5 )
Esta es una representación esquemática del sistema
Funciones de dos variables
Una función real de dos variables, f , no es más que una correspondencia que
asigna a cada pareja ( x, y ) de números reales otro número real único f ( x, y ) .
Profesora: Elena Álvarez Sáiz
3
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
Se define el dominio de la función f como el conjunto de pares reales en los
que la función está definida. El rango es el conjunto de números reales dado
por
Im f = { z ∈ / ( x , y ) ∈ D }
Ejemplos:
Consideremos las siguientes funciones y determinemos su dominio:
1) h ( x, y ) = 2x − 3y + 4
Es el semiplano inferior determinado por la recta 2x−
−3y+4=0
incluyendo los puntos de la recta
2) f ( x , y ) = log ( 4x + y − 5 )
Se trata del semiplano superior determinado por la recta
4x+y−
−5=0 sin incluir los puntos de la recta
3) g ( x , y, z ) =
1
2x − 3y + 4z − 6
Se trata de la región del espacio determinada por el plano
2x−
−3y+4z=6 que queda del otro lado del origen sin incluir los
puntos del plano.
4) K ( x , y, z ) = log ( 1 − x 2 − y 2 )
Consta del interior de la circunferencia x +y =1 sin incluir la
2
2
frontera.
5) T ( x, y, z ) = x 2 + y 2 − 4
Son todos los puntos del plano externos a la circunferencia x +y =4.
2
6) Q ( x, y, z ) = log ( 4 − x 2 − y 2 − z 2 )
4
Profesora: Elena Álvarez Sáiz
2
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Es el interior de la esfera con centro en el origen y radio 4 sin
incluir los puntos de la esfera.
La gráfica de una función de dos variables z = f ( x , y ) es la representación en el
espacio 3 de todas las combinaciones posibles de valores (x, y, z) siendo z la
imagen de (x, y) por la función f.
Como no es sencillo representar una función de dos variables, ya que su gráfica es
una superficie en R , pueden usarse conjuntos bidimensionales para obtener
3
información tridimensional a través de los conceptos de trazas y de curvas de nivel.
Dada una superficie S en R y un plano P cualquiera, la traza de S determinada por
3
P se define como la curva obtenida de S∩
∩P.
Las trazas más utilizadas además de las curvas de nivel para el análisis de
una superficie son los planos coordenados x=0 y y=0 ó planos paralelos a
ellos x=c y y=c.
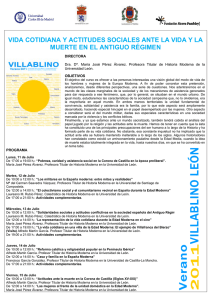
Curvas de nivel
Para una función de dos variables, z = f ( x , y ) , la curva de nivel para z = k es el
conjunto de todos los pares de valores (x, y) tales que su imagen es el valor k .
Profesora: Elena Álvarez Sáiz
5
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
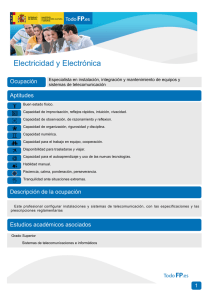
Lineas de contorno
8
6
4
2
0
1
1
0
0
-1
-1
-2
-2
Ejemplo: Observa las curvas de nivel de f ( x, y ) = xy
6
Profesora: Elena Álvarez Sáiz
x 2 − y2
x 2 + y2
en las figuras siguientes.
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Profesora: Elena Álvarez Sáiz
7
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
Superficies de nivel
Para el caso de funciones de tres variables, como ya lo comentamos, es imposible
hacer su gráfica por lo que siguiendo la idea anterior buscamos obtener información
de un conjunto de dimensión cuatro a partir de conjuntos tridimensionales, las
superficies de nivel, que son una generalización de las curvas de nivel por lo que
podemos dar la siguiente definición:
Dada la función w=f(x,y,z), sus superficies de nivel se definen como los conjuntos
S={(x,y,z)/ f(x,y,z)=c}
Observa que los conjuntos definidos son superficies y al igual que para las curvas de
nivel, una función de tres variables tiene un número infinito de superficies de nivel
por lo que en la práctica (otra vez) sólo se toman algunas que sean representativas.
Así como las curvas de nivel sirven para señalar los puntos con la misma altitud,
misma presión, etc., las superficies de nivel también tienen aplicaciones físicas.
Por ejemplo, si V(x,y,z) representa el voltaje (o potencial) de un campo eléctrico en
el punto (x,y,z), entonces las superficies de nivel V(x,y,z)=c se dicen superficies
equipotenciales y representan a todos los puntos en el espacio con el mismo
potencial.
Por otra parte, cualquier gráfica de una función z=f(x,y), es una superficie de nivel,
basta considerar g(x,y,z)=z−f(x,y) y entonces la superficie de nivel g(x,y,z)=0 es la
gráfica de z=f(x,y). Es por esto que a las gráficas de este tipo de funciones o de las
ecuaciones de tres variables se les llama superficies.
8
Profesora: Elena Álvarez Sáiz
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Para trazar una superficie de nivel se usan sus trazas con planos de la forma x=c,
y=c y z=c.
Las superficies de nivel más importantes son las llamadas superficies cuadráticas y
es muy conveniente que las repases en cualquier libro de Geometría Analítica o de
Cálculo. Dichas superficies son elipsoides, conos elípticos, paraboloides elípticos,
paraboloides hiperbólicos, hiperboloides de uno y dos mantos, cilindros (o sábanas)
elípticos, parabólicos e hiperbólicos.
Profesora: Elena Álvarez Sáiz
9
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
Ecuaciones
paramétricas
10
Ecuaciones implícitas
Plano
x = xo + ua1 + vb1
y = yo + ua2 + vb2
z = zo + ua 3 + vb3
Ax + By + Cz + D = 0
Cilindro
x = r cos u
y = rsenu
z =v
x 2 + y2 = r 2
Profesora: Elena Álvarez Sáiz
Gráfica
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Ecuaciones
paramétricas
Cono
(recto de sección
circular)
Esfera (centrado en
(0,0,0) y radio r
Ecuaciones implícitas
x = u cos v
y = usenv
z =u
z 2 = x 2 + y2
x = r sen u cos v
y = r sen u senv
z = r cos u
x 2 + y2 + z 2 = r 2
Gráfica
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
Ecuaciones
paramétricas
Elipsoide
Paraboloide
(de sección circular)
12
x = a sen u cos v
y = b sen u senv
z = c cos u
Ecuaciones implícitas
x2
a
2
+
y2
b
2
+
z2
c2
=1
x = u c os v
y = u senv
z =u
Profesora: Elena Álvarez Sáiz
2
z = x 2 + y2
Gráfica
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Ecuaciones
paramétricas
Hiperboloide
x = Chu c os v
y = Shu senv
z = Shu
Ecuaciones implícitas
z 2 = x 2 + y2 − 1
Gráfica
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
Derivada direccional
Definición (Dirección).- Una dirección en 2 es cualquier vector de norma 1.
Su u es una dirección en el plano entonces se puede expresar como u = ( cos ϕ, senϕ )
siendo φ el ángulo que forma el vector con el eje positivo de las X.
Definición (Derivada direccional en un punto): Sea f una función de dos variables y
u una dirección. Se define la derivada direccional de f en el punto xo ( a, b ) en la
dirección de u como el valor del siguiente límite en el caso de que exista:
lim
(
)
( )=D f
f xo + tu − f xo
t →0
u
t
( xo ) = fu' ( xo )
Z
( z′ϕ ) (a,b) = tgα
z = f (x, y)
Y
α
ϕ
(a, b)
X
En el caso de que u = ( cos φ, senφ ) la derivada direccional se puede expresar
como:
lim
f ( a + t cos φ, b + tsenφ ) − f ( a, b )
t →0
14
Profesora: Elena Álvarez Sáiz
t
( )
( )
= Du f xo = fu' xo
Ingeniería de Telecomunicación
Teoría: Funciones varias variables
Fundamentos Matemáticos I
INTERPRETACIÓN GEOMÉTRICA: es la pendiente de la recta tangente a
la curva intersección de la superficie con el plano vertical que contiene a la
dirección dada.
Derivada parcial
Las derivadas parciales son derivadas direccionales según las direcciones e1 = ( 1, 0 ) y
e2 = ( 0,1 ) representan la razón de cambio de una función f con respecto a una de sus
variables independientes manteniendo constantes las demás. Este proceso es conocido
con el nombre de derivación parcial.
Definición (Derivadas parciales).- Si z = f ( x , y ) es una función de dos variables se
define la derivada parcial de f en el punto ( a, b )
con respecto a x como
fx' ( a, b ) = lim
∆x → 0
f ( a + ∆x , b ) − f ( a, b )
∆x
con respecto a y como
fy' ( a, b ) = lim
f ( a, b + ∆y ) − f ( a, b )
∆y → 0
∆y
siempre que los límites anteriores existan.
INTERPRETACIÓN GEOMÉTRICA de las derivadas parciales.- Las
derivadas parciales no son más que derivadas de una función de una variable:
la función cuya gráfica se obtiene como intersección de la superficie con los
planos verticales x = a , y = b en los casos de derivada parcial
en la
dirección de y y en la dirección de x , respectivamente.
Profesora: Elena Álvarez Sáiz
S
15
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
Z
b
∂z
= tgα
∂x (a,b)
y
z = f (x, y)
b
Y
a
(a, b)
α
X
Z
x=a
∂z
= tgβ
∂y (a,b)
z = f (x, y)
b
(a, b)
β
Y
a
X
Interpretación de la derivada Parcial respecto a x y respecto a y
NOTACIÓN: Para hacer referencia a la derivada parcial de la función z = f ( x , y )
respecto a la variable x e y se suelen utilizar las siguientes notaciones:
16
Profesora: Elena Álvarez Sáiz
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
fx' ( a, b ) =
∂z
(a,b ) = zx' (a, b )
∂x
fy' ( a, b ) =
∂z
(a,b ) = zy' (a,b )
∂y
Ejemplo:
DERIVADA PARCIAL
2
z = x +y
2
Punto: P ( 1,1 )
u = ( 0,1 )
DERIVADA PARCIAL
z = x 2 + y2
Punto: P ( 1,1 ) u = ( 1, 0 )
y =1
x =1
DERIVADA DIRECCIONAL
z = x 2 + y2
1 1
,
2 2
Punto: P ( 1,1 ) u =
Profesora: Elena Álvarez Sáiz
S
17
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
IMPORTANTE:
•
Una función de dos variables puede ser continua en un punto y no ser
derivable parcialmente en él.
•
La existencia de derivadas parciales para las funciones de varias variables no
implica la continuidad de la función en el punto.
DERIVADAS PARCIALES de segundo orden:
z x' ( x + ∆x, y ) − z x' ( x , y )
∂ ∂x
∂ 2z
''
'
=
=
,
=
,
=
lim
z
x
y
f
x
y
( ) xx ( ) ∆x → 0
xx
∂x ∂x ∂x 2
∆x
z x' ( x , y + ∆y ) − z x' ( x, y )
∂ ∂x
∂ 2z
= z '' ( x, y ) = fxy ( x , y ) = lim
=
xy
∆y → 0
∂y ∂x ∂x ∂y
∆y
zy' ( x, y + ∆y ) − zy' ( x , y )
∂ ∂z
∂ 2z
''
z
x
y
f
x
y
=
=
,
=
,
=
lim
( ) yy ( ) ∆y → 0
yy
∂y ∂y ∂y 2
∆y
zy' ( x + ∆x , y ) − zy' ( x , y )
∂ ∂x
∂2z
= z '' ( x, y ) = fyx ( x, y ) = lim
=
yx
∆x → 0
∂x ∂y ∂y ∂x
∆x
TEOREMA DE SCHWARZ.- Sea z = f ( x , y ) es una función de dos variables. Si se
verifica que existen f , fx , fy , fxy , fyx y además fxy es continua en una región
abierta D entonces se cumple que en dicha región se da la igualdad de las
derivadas cruzadas de segundo orden.
Funciones diferenciables. Diferencial de una función de dos variables
Definición (Diferenciable y diferencial).- Sea z = f ( x , y ) una función definida y
acotada en un dominio D al cual pertenece xo = ( a, b ) y que tiene derivadas parciales
en dicho punto. Se dice que es diferenciable en xo si el incremento total:
∆z = f (a + ∆x, b + ∆y ) − f ( a, b )
18
Profesora: Elena Álvarez Sáiz
Ingeniería de Telecomunicación
Teoría: Funciones varias variables
Fundamentos Matemáticos I
correspondiente a los incrementos arbitrarios de ∆x e ∆y se puede expresar como
∆z =
∂f
∂f
(a, b ) ∆x + (a,b ) ∆y + ε ( ∆x , ∆y )
∂x
∂y
2
( ∆x )
2
+ ( ∆y )
cumpliendo que:
lim
( ∆x ,∆y )→( 0,0 )
ε ( ∆x , ∆y ) = 0
A la parte lineal en ∆x e ∆y se le llama diferencial de z = f ( x , y ) en xo = ( a, b ) y se
le denota,
dz =
∂z
∂z
dx +
dy .
∂x
∂y
TEOREMA (Condición necesaria de diferenciabilidad).- Si la función z = f ( x , y ) es
diferenciable en el punto ( a, b ) entonces es continua en ( a, b ) .
TEOREMA.- Si la función z = f ( x , y ) y una o las dos derivadas parciales primeras
son continuas en un entorno del punto
(a,b ) entonces la función es
diferenciable en dicho punto.
Plano tangente. Aproximación de la función por la diferencial
Sea S una superficie de ecuación z=f(x,y) diferenciable en (a,b) se puede
calcular el plano tangente a la superficie en el punto P(a, b, f(a,b)) como el
plano que pasa por P y sus vectores directores son los directores de las rectas:
x
=
a
+
t
x = a
r1 ≡ y = b
r2 ≡ y = b + t
∂f
∂f
z
=
f
a
,
b
+
a
,
b
⋅
t
( a, b ) ⋅ t
(
)
(
)
z = f ( a, b ) +
∂x
∂
y
Profesora: Elena Álvarez Sáiz
S
19
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
∂f
v1 = 1, 0, ( a, b )
∂x
∂f
v2 = 0,1, ( a, b )
∂y
Por lo tanto un vector normal al plano tangente es:
i
j
k
∂f
∂f
∂f
(a, b ) = (a, b ) i + (a,b ) j − ⋅k
∂x
∂x
∂y
∂f
0 1
( a, b )
∂y
n = 1 0
La ecuación del plano tangente es entonces:
∂f
( x , y, z ) − (a, b, f (a, b ) ),
∂x
( a, b ) ,
∂f
(a,b ), −1 = 0
∂y
∂f
∂f
(a,b )( x − a ) + (a, b )( y − b ) − ( z − f (a, b ) ) = 0
∂x
∂y
z = f ( a, b ) +
∂f
∂f
(a,b )( x − a ) + (a,b )( y − b )
∂x
∂y
Si f es diferenciable
∆z = f (a + ∆x, b + ∆y ) − f ( a, b ) ≈
para ( ∆x , ∆y ) → ( 0, 0 )
20
Profesora: Elena Álvarez Sáiz
∂f
∂f
(a,b ) ∆x + (a,b ) ∆y
∂x
∂y
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Relación entre la diferenciabilidad y la derivada direccional
TEOREMA: Si una función es diferenciable existe la derivada direccional en
cualquier dirección.
TEOREMA.- Si z = f ( x , y ) es una función diferenciable en
(a,b ) entonces la
derivada direccional de f en la dirección del vector unitario u = ( cos φ, senφ ) es
Du f ( a, b ) = fx ( a, b ) cos φ + fy ( a, b ) senφ
Gradiente
Definición.- Si z = f ( x , y ) es una función de dos variables se define el gradiente de
f en el punto xo = ( a, b ) como el vector:
Profesora: Elena Álvarez Sáiz
S
21
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
∇f ( a, b ) = fx (a, b ) i + fy ( a, b ) j
PROPIEDADES DEL GRADIENTE: Sea f una función diferenciable en el punto
(a,b ) . Se cumplen las siguientes propiedades:
(a)
Si el gradiente de f en ( a, b ) es el vector nulo entonces la derivada direccional
de f en cualquier dirección es cero.
(b)
La dirección de máximo crecimiento de f viene dada por ∇f ( x , y ) . El valor
máximo de la derivada direccional es ∇f ( x , y ) .
(c)
La dirección de mínimo crecimiento de f viene dada por −∇f ( x, y ) . El valor
mínimo de la derivada direccional es − ∇f ( x , y ) .
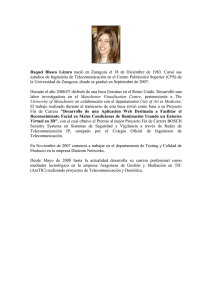
(d)
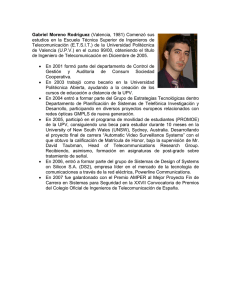
El vector gradiente es normal a las curvas de nivel.
2.5
2
5
2
2
3
1
3
6
6
3
4
4
1
5
7
1.5
1
0.5
1
2
4
0
3
5
7
-2
-2
4
6
5
2
-1.5
-2.5
-2.5
1
4
2
-1
3
-0.5
3
6
4
-1.5
-1
-0.5
0
0.5
1
7
1.5
Curvas de nivel de la superficie z = x 2 + y 2
22
Profesora: Elena Álvarez Sáiz
2
2.5
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Regla de la cadena
REGLA DE LA CADENA.- Sea z = f ( x , y ) una función definida en un dominio D
siendo cada una de las variables x e y una función de la variable t
x = φ ( t ) , y = ψ ( t ) , to < t < t1
Si en el punto t existen las derivadas
dx
= φ ' (t )
dt
dy
= ψ ' (t )
dt
y para cada una de las variables x = φ ( t ), y = ψ ( t ) la función z = f ( x , y ) es
diferenciable entonces se tiene:
dz
∂z dx
∂z dy
=
+
dt
∂x dt
∂y dt
DERIVACIÓN COMPUESTA DE DOS VARIABLES.- Sea z = f ( x , y ) una
función definida en un dominio D siendo cada una de las variables x e y una
función de dos variables u y v
x = φ ( u, v ) , y = ψ ( u, v )
Profesora: Elena Álvarez Sáiz
S
23
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
Si en el punto ( u, v ) existen las derivadas parciales continuas
∂x ∂x ∂y ∂y
,
,
,
∂u ∂v ∂u ∂v
y en el punto ( x, y ) la función es diferenciable entonces se tiene:
∂z
∂z ∂x
∂z ∂y
=
+
∂u
∂x ∂u
∂y ∂v
Derivación implícita
TEOREMA FUNCION IMPLÍCITA: Sea la ecuación F ( x , y ) = 0 . Dicha ecuación
define en un entorno del punto P (a, b ) a la variable y como función implícita de x ,
es decir, y = f ( x ) si:
El punto ( a, b ) pertenece a la curva de ecuación F ( x , y ) = 0
Las derivadas parciales Fx' ( x , y ) y Fy' ( x, y ) son funciones continuas en un
entorno del punto ( a, b )
Fy' ( x , y ) ≠ 0
NOTA: En el caso de que se cumplan los dos primeros puntos y el tercero se
sustituya por Fx' ( x , y ) ≠ 0 entonces es la x la que se define como función
implícita de y , es decir, x = h ( y ) .
24
Profesora: Elena Álvarez Sáiz
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
En trazo continuo:
2
(x 2 + y2 )
En trazo discontinuo:
2
( x 2 + y2 )
= x 2 − y2
= 2xy
TEOREMA.- Si la ecuación F ( x , y ) = 0 define a y como función derivable de
x entonces:
Fx ( x , y )
dy
=−
, Fy ( x, y ) ≠ 0
dx
Fy ( x , y )
Demostración: Basta derivar F ( x , y ) = 0 respecto a x aplicando la regla de la
cadena:
Fx + Fy
dy
=0
dx
TEOREMA FUNCION IMPLÍCITA: Sea la ecuación F ( x , y, z ) = 0 . Dicha ecuación
define en un entorno del punto P ( a, b, c ) a la variable z como función
implícita de x e y es decir, z = f ( x , y ) si:
El punto ( a, b, c ) pertenece a la superficie de ecuación F ( x , y, z ) = 0
Las derivadas parciales Fx' ( x , y, z ) , Fy' ( x , y, z ) y Fz' ( x , y, z ) son funciones
continuas en un entorno del punto ( a, b, c )
Fz' ( a, b, c ) ≠ 0
Profesora: Elena Álvarez Sáiz
S
25
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
TEOREMA.- Si la ecuación F ( x , y, z ) = 0 define a z como función diferenciable
de x e y entonces:
Fx ( x, y, z )
∂z
=−
, Fz ( x , y, z ) ≠ 0
∂x
Fz ( x , y, z )
Superficie implícita de ecuación:
Fy ( x, y, z )
∂z
=−
, Fz ( x, y, z ) ≠ 0
Fz ( x, y, z )
∂y
xy − yz − zx − y = 1
OTROS EJEMPLOS:
z2 +
0.8z 2 − log ( 0.8 ( z 2 + 0.3 ) ) = x 2 + y 2
26
Profesora: Elena Álvarez Sáiz
(
x 2 + y2 − 2
2
)
=1
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
−5 ( x 2y + x 2z + y 2x + y 2z + z 2y + z 2x ) + 2 ( xy + xz + yz ) = 0
Superficies
implícitas:
Plano
tangente:
Sea
S
una
superficie
de
ecuación
F ( x , y, z ) = C y sea Po un punto de S donde F es diferenciable. La ecuación del
plano tangente a S en Po ( xo , yo , zo ) es:
Fx ( xo , yo , zo )( x − xo ) + Fx ( xo , yo , zo )( y − yo ) + Fz ( xo , yo , zo )( z − zo ) = 0
y las ecuaciones paramétricas de la recta normal a S en Po ( xo , yo , zo ) son
x = xo + Fx ( xo , yo , zo ) ⋅ t
y = yo + Fy ( xo , yo , zo ) ⋅ t
z = zo + Fz ( xo , yo , zo ) ⋅ t
siempre y cuando no sean simultáneamente cero todas las derivadas parciales en el
punto.
Fórmula de Taylor
En este apartado generalizamos la fórmula de Taylor vista para funciones de una
variable. Como es sabido si y = f ( x ) es una función de una variable con derivadas
de cualquier orden en un entorno del punto x = a , la fórmula de Taylor en este
punto viene dada por:
Profesora: Elena Álvarez Sáiz
S
27
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
f '' ( a )
f ( x ) = f (a ) + f ' ( a )( x − a ) +
2!
2
(x − a )
+ ... +
f (n ( a )
n!
n
(x − a )
+ Rn
n
donde Rn es un infinitésimo de orden superior a ( x − a ) , es decir,
Rn
lim
x →a
n
=0
(x − a )
Utilizando la expresión del resto de Lagrange se tiene que
Rn =
f (n +1 ( c )
( n + 1) !
n +1
(x − a )
siendo c un punto intermedio entre a y x .
La generalización de la fórmula anterior para una función de dos variables,
z = f ( x , y ) , que admite derivadas parciales de cualquier orden en un entorno de
(a,b ) viene dada por :
1
f ( x, y ) = f (a, b ) + fx (a, b )( x − a ) + fy ( a, b )( y − b ) +
+
1
2
2
fxx ( a, b )( x − a ) + fyy ( a, b )( y − b ) + 2 fxy ( a, b )( x − a )( y − b ) + R2
2!
donde R2 es un infinitésimo verificando:
lim
( x ,y )→(a,b )
R2
( x − a, y − b )
2
=0
Haciendo
x = a + ∆x ⇔ x − a = ∆x
y = b + ∆y ⇔ y − b = ∆y
1
Con objeto de no complicar la notación se ha considerado únicamente la fórmula de Taylor
de orden 2 pudiendo generalizarse fácilmente a cualquier orden.
28
Profesora: Elena Álvarez Sáiz
Ingeniería de Telecomunicación
Teoría: Funciones varias variables
Fundamentos Matemáticos I
la expresión de la fórmula de Taylor es:
f ( a + ∆x, b + ∆y ) = f ( a, b ) + fx ( a, b ) ∆x + fy (a, b ) ∆y +
+
1
2
2
fxx ( a, b )( ∆x ) + fyy ( a, b )( ∆y ) + 2 fxy ( a, b ) ∆x ∆y + R2
2!
Esta expresión puede escribirse de la manera siguiente:
x = ( a + ∆x, b + ∆y )
x o = ( a, b )
1 f x = f xo + ∇f xo , x − xo + x − xo
2
()
( )
( )
(
T
)
⋅ Hf xo ⋅ x − xo + R2
( )(
)
donde
Hf xo =
( )
∂2 f
2
∂x
∂2 f
∂x ∂y
(x )
x
( )
o
o
∂2 f
x
∂y ∂x o fxx
=
∂2 f f
xo yx
∂y 2
( )
( )
( x )
(x )
o
o
fxy xo
fyy xo
( )
( )
se llama matriz hessiana. El término entre corchetes se le denomina diferencial
segunda y escribiendo dx = ∆x, dy = ∆y se tendrá:
d 2 f = fxx ( a, b )dx 2 + fyy ( a, b )dy 2 + 2 fxy ( a, b ) dxdy =
f ( a, b ) fxy ( a, b ) dx
= ( dx dy ) xx
fxy ( a, b ) fyy ( a, b ) dy
Definición de extremos. Puntos críticos
Definición (Extremos absolutos).- Sea z = f ( x , y ) una función definida en una región
D y sea ( a, b ) ∈ D se dice que
(a) f (a, b ) es un valor máximo absoluto de f en D si
f ( a, b ) ≥ f ( x , y ) ∀ ( x , y ) ∈ D
(b) f (a, b ) es un valor mínimo absoluto de f en D si
f ( a, b ) ≤ f ( x , y ) ∀ ( x , y ) ∈ D
Profesora: Elena Álvarez Sáiz
S
29
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
Definición (Extremos relativos).- Sea z = f ( x , y ) una función definida en una región
D y sea ( a, b ) ∈ D se dice que
(a) f (a, b ) es un valor máximo relativo de f en D si existe un entorno B ( a, b ) tal
que
f ( a, b ) ≥ f ( x , y ) ∀ ( x , y ) ∈ B
(b)
f (a, b ) es un valor mínimo relativo de f en D si existe un entorno B ( a, b )
tal que
f ( a, b ) ≤ f ( x , y ) ∀ ( x , y ) ∈ B
30
Profesora: Elena Álvarez Sáiz
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
TEOREMA DE WEIERSTRASS.- Si z = f ( x , y ) una función continua en un
subconjunto de D de 2 acotado y que contiene a su frontera entonces la función f
tiene máximo y mínimo en D .
Definición (Punto crítico).- Sea z = f ( x , y ) una función definida en una región D y
sea ( a, b ) ∈ D se dice que es un punto crítico si se cumple una de las afirmaciones
siguientes:
(1)
(a,b ) está situado en el contorno de D. A estos puntos se les llama puntos
frontera.
(2) fx (a, b ) = fy ( a, b ) = 0 , es decir, ∇f (a, b ) = 0 . A estos puntos se les llama
estacionarios.
Profesora: Elena Álvarez Sáiz
S
31
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
Teoría: Funciones varias variable
(3) no existe fx (a, b ) ó fy ( a, b ) . A estos puntos se les llama singulares.
TEOREMA.- Si f (a, b ) es un extremo relativo de f en una región abierta de D
entonces el punto ( a, b ) es un punto crítico de f .
Condición necesaria para la existencia de extremo de funciones diferenciables
TEOREMA.- Sea z = f ( x , y ) una función diferenciable en D. Es condición necesaria
para la existencia de un extremo relativo de f en ( a, b ) ∈ D que se verifique
fx (a, b ) = fy ( a, b ) = 0
32
Profesora: Elena Álvarez Sáiz
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
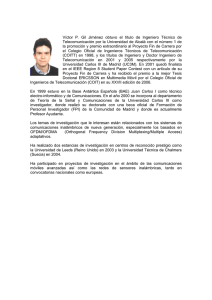
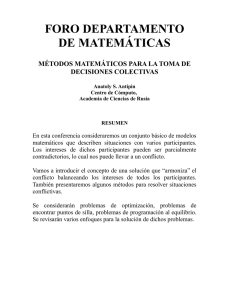
IMPORTANTE.- Es condición necesaria pero no suficiente. Basta tomar como
ejemplo la función f ( x, y ) = y 2 − x 2 que cumple que ( 0, 0 ) es un punto estacionario y
sin embargo no es extremo relativo (ni máximo ni mínimo).
En efecto, se cumple
fx ( x , y ) = −2x
fy ( x , y ) = 2y
→ fx ( 0, 0 ) = 0
→ fy ( 0, 0 ) = 0
y sin embargo el punto (0,0) no es ni máximo ni mínimo.
f ( 0, 0 ) = 0
f ( x, 0 ) = −x 2 < 0
f ( 0, y ) = y 2 > 0
Luego en todo entorno del punto (0, 0) existen puntos (x, y) cumpliendo
f ( x, y ) > f ( 0, 0 ) y puntos (x, y) cumpliendo f ( x, y ) < f ( 0, 0 ) . La siguiente imagen
muestra la gráfica de la función
Profesora: Elena Álvarez Sáiz
S
33
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
Cálculo de los extremos relativos de una función de dos variables z=f(x,y)
Teniendo en cuenta la fórmula de Taylor
f ( a + ∆x, b + ∆y ) = f ( a, b ) + fx ( a, b ) ∆x + fy (a, b ) ∆y +
+
1
2
2
fxx ( a, b )( ∆x ) + fyy ( a, b )( ∆y ) + 2 fxy ( a, b ) ∆x ∆y + R2
2!
si (a, b) es un punto cumpliendo fx (a, b ) = fy ( a, b ) = 0 se tendrá que:
f ( a + ∆x, b + ∆y ) − f ( a, b ) =
+
1
2
2
fxx ( a, b )( ∆x ) + fyy ( a, b )( ∆y ) + 2 fxy ( a, b ) ∆x ∆y + R2
2!
Considerando ∆x e ∆x suficientemente pequeños se cumple que:
signo ( f ( a + ∆x , b + ∆y ) − f ( a, b ) ) =
2
2
= signo fxx ( a, b )( ∆x ) + fyy ( a, b )( ∆y ) + 2 fxy ( a, b ) ∆x ∆y
y como
d 2 f = fxx ( a, b )dx 2 + fyy ( a, b )dy 2 + 2 fxy ( a, b ) dxdy =
f ( a, b ) fxy ( a, b ) dx
= ( dx dy ) xx
fxy ( a, b ) fyy ( a, b ) dy
34
Profesora: Elena Álvarez Sáiz
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
se trata de determinar el signo de la diferencial segunda o equivalentemente si la
matriz hessiana es definida positiva o negativa
Método práctico: Los pasos a seguir son:
(1) Cálculo de los puntos críticos como solución del sistema
fx ( x , y ) = 0
fy ( x, y ) = 0
(b) Si (a, b) es un punto crítico el estudio del hessiano
H =
fxx ( a, b ) fxy ( a, b )
fyx ( a, b ) fyy ( a, b )
nos permitirá concluir:
H > 0 fxx ( a, b ) > 0
⇒
H > 0 fxx ( a, b ) < 0
⇒
H <0
⇒
( a, b )
( a, b )
( a, b )
mínimo relativo
máximo relativo
punto de silla
Cálculo de los extremos relativos de una función de n variables
Los pasos a seguir son:
(1) Cálculo de los puntos críticos como solución del sistema
Profesora: Elena Álvarez Sáiz
S
35
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
fx
2
....................................
fx ( x1, x 2 ,..., x n ) = 0
n
fx
1
( x1, x 2 ,..., xn ) = 0
( x1, x 2 ,..., xn ) = 0
(2) Si (a , a ,...,a ) es un punto crítico construimos
1
2
n
fx x
1 1
f
d 2 f = x 2x1
...
fx x
n 1
fx x
1 2
fx x
2 2
...
fx
nx2
... fx x
1 n
... fx x
2 n
... ...
... fx x
n n
si d 2 f es definida positiva el punto (a , a ,...,a ) es un mínimo
1
2
n
relativo
si d 2 f es definida negativa entonces el punto (a , a ,...,a ) es
1
2
n
un máximo relativo
si d 2 f no es definida ni semidefinida en el punto de
coordenadas (a , a ,...,a ) no hay punto extremo.
1
2
si d f
2
n
es semidefinida no puede afirmarse nada y hay que
recurrir a la definición.
a11 a12
a
a
Sea A = 21 22
... ...
an 1 a n 2
... a1n
... a2n
se definen las submatrices siguientes obtenidas a
... ...
... ann
partir de la matriz A
a11 a12 a13
a11 a12
A1 = ( a1 ) , A2 =
, A3 = a21 a22 a23 ,... ,
a21 a22
a 31 a 31 a 33
a11 a12 ... a1n
a
21 a22 ... a2n
= A
An =
... ... ... ...
an 1 an 2 ... ann
Llamamos ∆n = det ( An ) y estudiamos el signo de estos determinantes:
∆1, ∆2 , ∆3 ,..., ∆n , entonces:
36
Profesora: Elena Álvarez Sáiz
Teoría: Funciones varias variables
Ingeniería de Telecomunicación
Fundamentos Matemáticos I
•
[+,+,+,+,…,+] MÍNIMO RELATIVO
•
[+, - ,+, - ,…] MÁXIMO RELATIVO
Extremos condicionados
Hasta este momento se han calculado los extremos locales de funciones cuyas
variables no están ligadas por ninguna condición. Sin embargo, muchos
problemas de optimización presentan restricciones o condiciones que debe
verificar la solución.
Un extremo (máximo o mínimo) de la función f ( x, y ) cuando
( x, y ) está sobre una
curva del plano contenida en el dominio de f , cuya ecuación es g ( x , y ) = 0 , se dice
que es un extremo condicionado a la condición o restricción g ( x , y ) = 0 .
Por ejemplo:
Profesora: Elena Álvarez Sáiz
S
37
Ingeniería de Telecomunicación
Teoría: Funciones varias variable
Fundamentos Matemáticos I
El método de Lagrange
i2
permite hallar analíticamente los puntos extremos
condicionados de una función suave, es decir, con derivadas parciales continuas.
Sea
F(x,y) la función
por
la ecuación
objetivo. Supongamos que (x,y)
g(x,y) = K.
Las funciones
F y g son
están condicionadas
suaves.
TEOREMA (Método de Lagrange para funciones de dos variables y una condición).Sean f y g dos funciones con derivadas parciales continuas tal que f tiene un
máximo o mínimo sujeto a la restricción dada por g ( x , y ) = 0 entonces dicho
extremo se producirá en uno de los puntos críticos de la función F dada por
F ( x , y, λ ) = f ( x , y ) + λg ( x , y )
Al número λ (lambda) se le llama "multiplicador de Lagrange".
OBSERVACIÓN.- Según este teorema, los extremos libres de F coinciden con los
extremos condicionados de f .
2
El método lo realizó uno de los matemáticos más grandes del siglo XVIII, Joseph Lagrange,
cuando tenía 19 años.
38
Profesora: Elena Álvarez Sáiz
Ingeniería de Telecomunicación
Teoría: Funciones varias variables
Fundamentos Matemáticos I
Para analizar si el punto crítico ( a, b, λo ) obtenido del sistema
Fx = 0
fx + λgx = 0
Fy = 0 ⇒ fy + λgy = 0
Fλ = 0
g
x
,
y
=
0
(
)
es máximo o mínimo se analiza el signo de la diferencial segunda de F en el
punto ( a, b )
signo d 2F = signo ( Fxx dx 2 + Fyydy 2 + 2Fxydxdy )
(a,b )
estando ligadas dx y dy por la condición:
gx dx + gydy = 0
Nota: Si detectas algún error o errata ponte en contacto con la profesora para su
corrección.
Profesora: Elena Álvarez Sáiz
S
39