Practicas Lab. 4
Anuncio

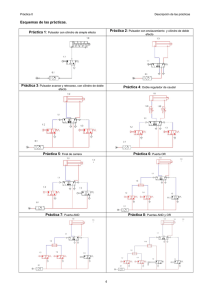
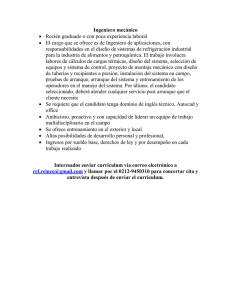
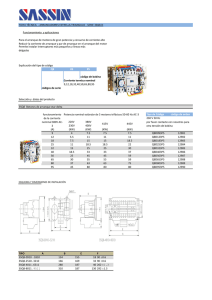
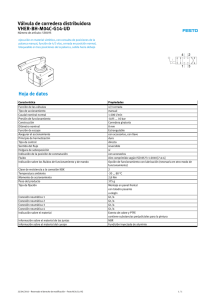
UTU LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO A. ELECTROTECNIA Arranque de Motores Fecha Firma 1) Arranque automático de un motor de inducción III de 3 Hp en 400 V. i . Arranque desde un puesto de mando. ii . Arranque desde dos puestos de mando. 2) Estrella triángulo. Motor III 10 de Hp en 220 V i . Arranque Estrella – Triángulo. Conexión convencional (solo discutir). ii . Arranque Estrella – Triángulo. Priorizar excitación de los contactores. iii . Temporizar el pasaje de Estrella a Triángulo. 3) Estrella triángulo con inversión. Motor III de 10 Hp en 220 V. i . Arranque Estrella – Triángulo con Inversión. ii . Priorizar excitación de los contactores. iii . Temporizar el pasaje de Estrella a Triángulo. iv . Una vez detenida la máquina, accionando el botón de PARE, se debe esperar un tiempo prudencial, hasta que se detenga totalmente el motor, para poderla arrancar nuevamente. Esto es para evitar un arranque a contramarcha. 4) Arranque por autotransformador para motor de 15 Hp en 400 V. a) Analizar: Circuito de Potencia – Describir cual sería la secuencia adecuada de excitación de los Contactores. b) Diseñar: Circuito de Comando que cumpla con la secuencia vista en la parte anterior. c) Comparar: ese circuito con el de comando del propio equipo. d) Notar: que hay dos versiones del Circuito de Comando, ¿Funcionan ambas? e) Conectar: Un motor adecuado y hacer mediciones. Arranque de Motores (Información Teórica solamente) Se brinda solamente información teórica de estos métodos de arranque por estar en desuso o por haber sido superados por otras tecnologías. 5) Arranque por resistencias estatóricas. i . Arranque en dos pasos discretos. 6) Arranque por resistencias rotóricas. i . Arranque progresivo, condicionando el arranque a la mayor resistencia. Arranque de Motores con Arrancadores Electrónicos 7) Arranque con Arrancador de “Estado Sólido”. (Demostrativa) i . Rampa de aceleración de 3 seg. 8) Arranque con “Variador de Frecuencia” para motor de 3 Hp. (Demostrativa) i . Conectar Motor y Variador. ii . Programar rampas de aceleración y desaceleración de 2 seg. iii . Controlar velocidad con potenciómetro y valores fijos Dirija sus sugerencias a los Profesores de Laboratorio Página: 1 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006 UTU LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO Automatismos Electromecánicos 9) Inversión de giro automática, en un motor de inducción III de 3 Hp en 220 V. Cortina de garaje. i . Implementar un circuito que controle el accionamiento de la cortina desde dos puestos de mando: uno exterior, para llamada de subida y otro interior, con comando de subida, bajada y detención total. ii . Priorizar siempre el comando de subida. Invertir el giro del motor, respetando los enclavamientos de comando y de accionamiento. iii . Al ser solicitada la subida desde cualquiera de los puestos de mando, siempre y cuando el sistema no esté desactivado, sube hasta el extremo superior y se detiene. Al cabo de un tiempo ajustable, se comenzará el descenso. Si cuando estuviera bajando se solicita una nueva subida, se debe detener la bajada y retomar la subida. 10) Control de nivel de líquidos: a) Con Flotadores i . Abastecimiento de un tanque. ii . Vaciado de un sótano. b) Con CN5 i . Abastecimiento de un tanque. ii . Vaciado de un sótano. c) Con CN6 i . Abastecimiento de un tanque superior, dependiendo de la disponibilidad de un tanque inferior. ii . Doble bomba temporizada para reforzar el llenado. 11) Control de temperatura: Se pretende controlar la temperatura de un Horno Industrial de una potencia de 10 kW. Para ello se cuenta con dos tipos de sensores: a) Termocupla (Ver información Teórica y hacer práctica) b) Termoresistencia (Ver información Teórica y hacer práctica) 12) Corrección de factor de potencia. Utilizar un motor de 10 Hp. i . Determinar el Factor de Potencia de un motor trifásico mediante medición de energía y potencias. Arrancarlo como corresponde. ¿Será necesario utilizar transformadores de corriente?. Realizar luego el ensayo. ii . Determinar la potencia reactiva necesaria para corregir el Factor de Potencia al 92%. iii . Ensayar la batería de condensadores para determinar la potencia de los mismos. Estudiar como se deben conectar para no pasarse a carga capacitiva. iv . Conectar la batería de condensadores al motor y repetir las mediciones observando resultados. v . Realizar los diagramas fasoriales correspondientes. 13) Ascensor electromecánico. i . Reconocer el funcionamiento de los distintos componentes y bloques del circuito. ii . Generar fallas extrayendo las clavijas en orden, anotando en cada una los síntomas de la falla, determinando su ubicación, posible causa y solución. iii . Describir el Procedimiento seguido, paso a paso, para determinar una falla. 14) Grúa. a) Un solo sentido. Manejo de un Gancho. Pautas: i . Marcha I (Acomodar gancho) Intermitente, mediante pulsador SB1. ii . Marcha II (traslado corto recorrido) Continua (automantenida) , mediante los pulsadores SB1y SB2 pulsados simultáneamente. iii . Marcha III (Traslado largo recorrido) Continua, mediante pulsador SB3, habiendo un cierto tiempo de estar en Marcha II. iv . Secuencias posibles de Funcionamiento: 1Æ 2; 2 Æ t Æ 3; 3 Æ 2; 1 Æ 0; 2 (STOP) Æ Dirija sus sugerencias a los Profesores de Laboratorio Página: 2 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006 UTU LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO 0; 3 (STOP) Æ 0. No puede entrar Marcha I sin pasar por STOP. vi . Tener en cuenta que ninguna marcha puede entrar sin haber desconectado la anterior. v. 15) Reconocimiento de Planos I – Análisis y puesta en marcha. i . Poner en funcionamiento el tablero, cumpliendo con la cadena de seguridad requerida y los accionamientos pertinentes, despejando cualquier falla de ser necesario. ii . Poner en marcha el motor de dos velocidades de acuerdo a lo establecido en el plano adjunto. 16) Reconocimiento de Planos II – Entendimiento y desarrollo. Ejemplo: Control de Caldera. i . Dado un plano de un automatismo en particular, hacer una “Memoria Descriptiva” del funcionamiento del mismo. ii . Dicha memoria debe ser presentada como informe, detallando funcionamiento del automatismo, comentando posibles mejoras o cambios necesarios. iii . Materiales necesarios y costos. B. LUMINOTECNIA 1) Lámpara incandescente i . Establecer la corriente de arranque de esta lámpara bajo tensión nominal. 2) Cambio de balasta en tubo de 40 watts. i . Determinar prácticamente las condiciones nominales de trabajo. ii . Sustituir la balasta inductiva por una resistiva. iii . Determinar el Factor de potencia en cada caso, y decidir cual es el más adecuado. 3) Conexión de lámpara HPI-T de 400 watts i . Construir curva de arranque y hallar el Run Up. ii . Corregir el Factor de Potencia. 4) Conexión de lámpara SON-T de 400 watts i . Construir curva de arranque y hallar el Run Up. ii . Corregir el Factor de Potencia. 5) Conexión de lámpara SOXS i . Construir curva de arranque y hallar el Run Up. ii . Corregir el Factor de Potencia. C. NEUMÁTICA NO SE PUEDEN MEZCLAR CICUITOS DE POTENCIA CON CIRCUITOS DE MANDO 1) Reconocimiento de Elementos: Se debe hacer un análisis de los elementos usados en Neumática, antes de conectarlos a un circuito, indicando su denominación, simbología, uso y funcionamiento. Puede solicitarse al docente una tabla de elementos como guía. 2) Accionamiento de un cilindro de simple efecto. Mando Directo: (Se puede simular un pistón de Simple Efecto con uno de Doble Efecto presurizando el cabezal del vástago con una presión reducida. ¿Con qué elemento?) Dirija sus sugerencias a los Profesores de Laboratorio Página: 3 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006 UTU LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO i . Con 1 botonera. ii . Con 2 botoneras pulsadas indistintamente. iii . Con 2 botoneras pulsadas simultáneamente. 3) Accionamiento de un cilindro de doble efecto con válvulas biestables: a) Indirecto con dos botoneras. Una para el avance y otra para el retroceso. i . Regular la velocidad en la carrera positiva. ii . Regular la velocidad en la carrera negativa. b) Semiautomático con final de carrera. i . El pistón, una vez actuado, debe avanzar con velocidad controlada, llegar al extremo y regresar rápidamente. c) Semiautomático con retorno temporizado. i . El pistón, una vez actuado, debe avanzar con velocidad controlada, llegar al extremo y regresar luego de transcurrido cierto tiempo desde que efectivamente llegó al extremo. d) Continuo / manual con llave selectora. i . El pistón, una vez actuado, debe llegar al extremo y regresar, cumpliendo un ciclo al apretar un pulsador, o repetir el ciclo continuamente si en vez del pulsador se acciona una llave selectora. 4) Memorias neumáticas. Sistema anti repetición. (Anti bombeo) a) Inversión temporizada aun con señal enviada por el pulsador y anti repetición. i . El pistón, una vez actuado, debe llegar al extremo y regresar luego de transcurrido cierto tiempo, independientemente del estado del pulsador. El pistón no volverá a salir si al final del ciclo el pulsador se encuentra presionado, sí lo hará si en la posición de descanso se detecta un pasaje de 0 a 1 del pulsador. 5) Memorias secuenciales neumáticas. Sistema Secuencial Neumático a) Un cilindro de doble efecto debe cumplir una carrera de 6 etapas, siguiendo una secuencia. i . Si colocamos cuatro sensores para determinar la posición del pistón y los llamamos: a0, a1, a2 y a3, contándolos en orden desde la posición de descanso, las etapas serán: 1) a0 – a2; 2) a2 – a1; 3) a1 – a3; 4) a3 – a1; 5) a1 – a2; 6) a2 – a0. b) Dos cilindros de doble efecto deben cumplir un ciclo cuadrado, siguiendo una secuencia. i . Si colocamos sensores para determinar la posición extrema de los dos pistones y un pulsador para inicio del ciclo. El ciclo se debe iniciar al apretar el pulsador, siempre y cuando los dos cilindros estén en reposo. Debe salir el pistón A, al llegar al extremo hace salir al B, al llegar a su extremo, debe retornar el pistón A y al llegar a su posición de descanso debe retornar el pistón B, quedando pronto para reiniciar el ciclo. No desarmar el bloque secuencial del anterior ejercicio. Analizarlo y realizar las modificaciones necesarias. c) En ambos casos se debe discutir la diferencia de un arranque en “frío” y un arranque en “caliente”. D. ELECTRONEUMÁTICA 1) Reconocimiento de Elementos: Se debe hacer un análisis de los elementos usados en Electro Neumática, antes de conectarlos a un circuito, indicando su denominación, simbología, uso y funcionamiento. Se obviarán los elementos de trabajo, reguladores, etc., que fueron incluidos en la Práctica C1. Puede solicitarse al docente una tabla de elementos como guía. 2) Accionamiento de un cilindro de doble efecto con válvulas de mando biestables. a) Indirecto con dos botoneras. Una para el avance y otra para el retroceso. b) Semiautomático con final de carrera. i . El pistón, una vez actuado, debe llegar al extremo y regresar. Dirija sus sugerencias a los Profesores de Laboratorio Página: 4 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006 UTU c) i. d) i. e) i. 3) LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO Semiautomático con retorno temporizado. El pistón, una vez actuado, debe llegar al extremo y regresar luego de transcurrido cierto tiempo desde que efectivamente llegó al extremo. Continuo / manual con llave selectora. El pistón, una vez actuado, debe llegar al extremo y regresar, cumpliendo un ciclo, apretando un pulsador, o repetir el ciclo, por medio de una llave selectora. Accionamiento de un cilindro de doble efecto con válvulas de mando monoestables. El pistón, una vez actuado, debe llegar al extremo y regresar. Sistema anti repetición. (Anti bombeo) a) Inversión temporizada aun con señal enviada por el pulsador y anti repetición. i . El pistón, una vez actuado, debe llegar al extremo y regresar luego de transcurrido cierto tiempo, independientemente del estado del pulsador. El pistón no volverá a salir si al final del ciclo el pulsador se encuentra presionado, sí lo hará si en la posición de descanso se detecta un pasaje de “0” a “1” del pulsador. E. DIGITAL Puertas Lógicas 1) Puertas Lógicas. Reconocimiento y Tablas de Verdad a) Analizar, probar y construir las tablas de verdad de las funciones OR, AND, NOT, NOR y NAND. b) Comprobar teórica y prácticamente los teoremas del álgebra de Boole. 2) Implementación de funciones lógicas mediante: SOP ( Suma de Productos, MINITÉRMINOS ) y POS ( Producto de Sumas o MAXITÉRMINOS ) a) Construir una puerta XOR. b) Para las funciones determinadas por las tablas de verdad en las cuales se tienen “unos” en las posiciones: b1) 0, 2, 5, 7, 8, 10, 13, 15; y b2) 3, 5, 7, 11, 12, 13, 15; i . Construir la tabla de verdad, hallar la función canónica y reducirla por los teoremas del álgebra de Boole y por Karnaugh. ii . Implementar esa función lógica solamente con puertas NAND y luego con puertas NOR Manejo de datos 3) 4) Para los siguientes elementos hallar la tabla de verdad correspondiente y buscar datos reales en hojas caracteristicas: a) Codificadores. i . Dados 4 sensores (a, b, c, d) situados a 90 grados respectivamente sobre un disco cuyas mitades son distintas (zona de detección), expresar en código Gray su posición (1er, 2do, 3er o 4to cuadrante). b) Decodificadores. i . Construir un decodificador de 2 a 4 bits. ii . Estudiar el funcionamiento del bloque decodificador de los equipos del Laboratorio. c) Multiplexores. Construir un circuito que seleccione de entre 4 entradas posibles, cual se trasmite a la salida. d) Demultiplexores. Construir un circuito que envíe una señal de entrada a una de 4 salidas posibles. Dada la función determinada por Σ(1, 2, 5, 7), implementarla con los siguientes elementos: a) Con un Decodificador. b) Con un Multiplexor. Dirija sus sugerencias a los Profesores de Laboratorio Página: 5 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006 UTU LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO Manejo de números 5) 6) 7) 8) Realizar la tabla de verdad de un Semi-Sumador y construirlo con puertas lógicas. Realizar la tabla de verdad de un Sumador completo y verificarla usando los bloques Sumadores. Realizar la suma de dos números de 4 bits cada uno, visualizando el resultado en un display. ALU. Se ingresarán dos números, A y B, a la ALU a través de dos teclados. Con la ALU se detectará si A>B, A<B o A=B. Utilizando esas salidas de la ALU ( y quizá algo más) a través de un Demultiplexor de 4 líneas, 2x1, desplegar en un Display el mayor o el menor de los números, según se elija. Biestables • Para los siguientes ejercicios, realizar la Tabla de Verdad correspondiente, su diagrama lógico y determinar las condiciones de funcionamiento. Luego, construirlos. 9) FF RS con Puertas NOR. 10) FF RS con Puertas NAND. 11) En base a lo anterior, construir un circuito antirrepique de contactos. • Para los siguientes ejercicios, utilizar el bloque del biestable correspondiente. Determinar su Tabla de Verdad y dibujar el diagrama lógico. 12) FF JK. Ver su utilidad para sustituir otro tipo de FF. 13) FF D. Idem anterior. Secuenciales 14) 15) 16) 17) 18) 19) 20) 21) 22) 23) Contador binario natural ascendente, asincrónico. 0 Æ 15. Contador binario natural descendente, asincrónico. 15 Æ 0. Contador asincrónico binario natural ascendente / descendente. 0 Æ 15; 15 Æ 0. Contador asincrónico hasta 60. Visualizar en Display las Decenas y las Unidades. Contador Binario natural ascendente, sincrónico. 0 Æ 9. Contador en anillo con inicialización. Contador en anillo con auto corrección. Contador Johnson módulo 10. Decodificar todos los estados (como en el C. Integrado 4017) Contador asincrónico con FF D. 0 Æ 15. Construcción de un sistema de detección de fallos y expulsión pieza en falta en una línea de montaje de lámparas. Utilizando registros de desplazamiento. Se dará más detalle en forma escrita. 24) Realización de prácticas sobre autómatas a determinar. Solicitar letra. Memorias Utilizando una Memoria RAN 4x4, construir los siguientes sistemas. 25) Contador ascendente / descendente, con memoria y FF D. 26) Contador ascendente con memoria y 4 FF D para el manejo de un Motor Paso a Paso. 27) Construir el autómata implementado en la Práctica E 24. Ver la posibilidad de sustituir la RAM por una Matriz de Diodos. F. PLC 1) Reconocimiento de entradas y salidas. i . Observar las distintas características de las entradas y salidas, discutiendo su utilidad según el Dirija sus sugerencias a los Profesores de Laboratorio Página: 6 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006 UTU LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO caso. Reconocer que significa preguntar por el estado de una entrada o de una salida y asignarle un estado a una salida o relé. iii . Utilizar los FFs RS en sustitución de la asignación. ii . 2) Utilización de funciones lógicas. i . Resolución de distintos problemas combinacionales, formas correctas e incorrectas de ingresar los programas. ii . Distintas formas de encarar las funciones lógicas. 3) Realizar el comando Estrella - Triángulo de un motor III i . Arranque Estrella – Triángulo. Implementar el sistema descrito en la sección A4. 4) Implementar la sustitución de un Panel de Alarmas de relés, por medio de un PLC. i . Dado el circuito de un panel de alarmas electromecánico, sustituirlo por uno con PLC. ii . Estudiar la implicancia de el agregado de dos nuevas alarmas en ambos sistemas de alarma. 5) Implementar un sistema de Control de Niveles. i . Dada una situación física, implementar la solución del problema con un PLC. G. TÉCNICAS DE MANDO “Para acceder a esta bolilla, el alumno debe haber realizado las practicas de las anteriores bolillas, a fin de que tenga el conocimiento requerido y un adecuado manejo de las técnicas que empleará de aquí en adelante”. 1) Cambio de nivel de cinta (Ciclo cuadrado) En una línea de producción se deben recoger las cajas con el producto terminado que trae una cinta transportadora, depositándolas en otra cinta transportadora en el piso siguiente llevándolas al depósito. Este sistema debe realizarse con dos cilindros neumáticos que pueden comandarse de las siguientes maneras: a) Con válvulas biestables neumáticas i . Accionamiento directo a través de los finales de carrera, con posiciones temporizadas. ii . Accionamiento realizado con Secuencial Neumático. No desarmar el bloque secuencial. Analizarlo y realizar las modificaciones necesarias para obtener el número de etapas requerido. b) Con válvulas biestables electro neumáticas i . Accionamiento directo a través de los finales de carrera. ii . Accionamiento con PLC, con posiciones temporizadas. c) Con válvulas monoestables electro neumáticas i . Accionamiento directo a través de los finales de carrera y relés necesarios. ii . Accionamiento con PLC, con posiciones temporizadas. Dirija sus sugerencias a los Profesores de Laboratorio Página: 7 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006 UTU LABORATORIO DE ELECTROTECNIA Prácticas 2006.doc 4º AÑO 2) Cizalla Neumática Se deben accionar dos pulsadores simultáneamente, dentro de cierto tiempo, para poder accionar el pistón. Si luego de haber pulsado alguno de los pulsadores no se pulsa el otro antes de transcurrido el tiempo fijado, no se puede accionar el pistón, debiendo soltar todos los pulsadores para reiniciar la maniobra. Discutir cual puede ser el mejor método para provocar el retorno e implementarlo. a) Con válvula biestable, neumática y electro neumática. b) Con válvula monoestable electro neumática y PLC. 3) Clasificación de cajas de distinto tamaño. (Análisis de circuitos con Karnaugh.) Implementar un sistema que permita distinguir entre tres tamaños distintos de cajas que vienen por una cinta transportadora y dirigirlas, según su tamaño, hacia dos depósitos distintos, chicas y grandes por un lado y medianas al otro. Si el Sistema no detecta ninguna caja, debe permanecer en la ultima posición adquirida. a) Con válvula biestable, neumática y electro neumática. b) Con válvula monoestable electro neumática y PLC. 4) Morsa y Guillotina Una mesa de corte cuenta con una morsa que sujeta el material, y una guillotina, que efectúa el corte del mismo. El accionamiento de la morsa debe cumplir con los requisitos de seguridad pedidos en el punto 2 de esta sección. Una vez que la morsa haya sujetado la pieza, la guillotina hará el corte, volviendo a su posición de descanso inmediatamente. Cuando haya regresado, dará la orden a la morza para que esta suelte la pieza. a) Con válvula biestable, neumática y electro neumática. (Puede ser un sistema híbrido) b) Con válvula monoestable electro neumática. c) Con mando por PLC. Evitar que se repita el ciclo si se tienen presionados los pulsadores o pedal de maniobra. H. OLEOHIDRÁULICA 1) Medición de caudales. a) Medir el caudal de ambas bombas, utilizando el recipiente tarado y un reloj. 2) Actuación de un cilindro hidráulico. a) Actuar el cilindro en forma manual con posiciones de descanso en los extremos. b) Actuar el cilindro en forma manual con la posibilidad de detenerlo en cualquier posición. 3) Regulación de velocidad en un cilindro hidráulico: Discutir utilidades, precauciones y viabilidad, para realizar el control en los siguientes casos: a) En la entrada. b) En la salida. c) En derivación. 4) Actuación de un cilindro con dos velocidades. a) El cilindro debe avanzar rápido (velocidad de aproximación) hasta un cierto lugar y continuar lentamente (velocidad de ajuste) hasta llegar al final del recorrido, lugar donde esperará un tiempo y luego retornará rápido. 5) Acumulador. a) Comprobar las utilidades de un acumulador en un circuito hidráulico. Utilizando el circuito anterior, el acumulador se carga en el momento de espera y se descarga rápidamente en el retorno, aumentando la velocidad de retroceso. Dirija sus sugerencias a los Profesores de Laboratorio Página: 8 de 8 Archivo: Prácticas 2006.doc Versión: 28/03/2006