Drive Para Máquina IS de Fabricación de Envases de Vidrio
Anuncio

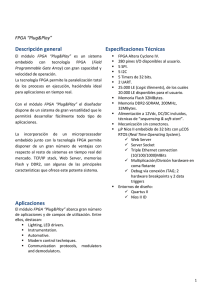
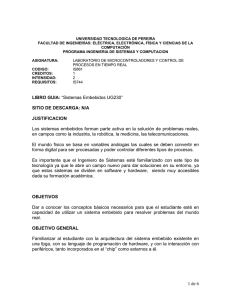
Drive Para Máquina IS de Fabricación de Envases de Vidrio "LabVIEW es ampliamente conocido en nuestro departamento de Software. En su conjunto, estas circunstancias nos hacen estimar un ahorro de tiempo de desarrollo de un 30%. " - Julio A. Suarez Acebal, AVACON S.A. El Reto: Crear un sistema de control de la velocidad y la fase de una máquina IS de fabricación de envases de vidrio (Drive de máquina IS). Se requiere un sistema completamente configurable, con tratamiento universal para los accionamientos de la máquina, alta resolución temporal y alta fiabilidad. Lea el Caso de Estudio Completo La Solución: Crear un eje de levas electrónico con señales digitales de eventos, de control y de seguridad generados sobre FPGA, con control de accionamientos de alta velocidad sobre PC en tiempo real y completamente configurable desde un PC Supervisor. Autor(es): Julio A. Suarez Acebal - AVACON S.A. C.1 Introducción. Una máquina IS (Individual Section Machine) es una máquina operadora (ó manipuladora) para la formación de envases de vidrio (sector de vidrio hueco ). Los componentes fundamentales de una máquina IS estándar son los siguientes: • Grupo de secciones individuales: agregado de varias submáquinas iguales (secciones individuales) yuxtapuestas. Cada sección individual es un mecanismo completo para formar un número determinado de envases. Un número típico de envases generados en cada ciclo de una sección individual es 2. Un número típico de secciones individuales en una máquina IS es 12. • Un generador de gotas de vidrio fundido ( Glass Feeder), que proporciona gotas de vidrio fundido aisladas para el distribuidor de máquina (ver a continuación). • Un repartidor secuencial de gotas de vidrio fundido ( Gob Distributor) hacia cada una de las secciones individuales. • Accionamientos para evacuar los envases fabricados (transportadores, Rueda de Transferencia, Stacker). • Accionamientos de seguridad, refrigeración y varios. Cada sección individual consta de decenas de accionamientos. La sección repite una secuencia periódica de movimientos para la formación iterativa de envases. Por ello las máquinas IS han sido diseñadas desde su origen como máquinas controladas por un eje con movimiento circular periódico a modo de eje de levas. Cada revolución del eje de levas o tambor, corresponde con un ciclo de cada una de las secciones, lo que equivale a un ciclo de máquina IS completa. Trabajan 24 horas/día, 356 días/año salvo paradas cortas y programadas para cambios de modelo de fabricación. Por esta razón y por las características tan exigentes y peligrosas de su materia prima, estas máquinas requieren sistemas robustos, fiables y configurables en un rango amplio de velocidades. La producción de una máquina IS se obtiene a partir de los datos de velocidad del Feeder y del las Gotas por corte (envases producidos por cada ciclo de una sección). Unos datos típicos de esas variables son v = 150 cortes/min y G=2, que derivan en una producción de 432.000 envases/día. Un horno típico de una planta da servicio a tres máquinas, lo que equivale a unas 1.300.000 envases/día. Una planta típica tiene instalados dos hornos, lo que equivale a una producción de unas 2.600.000 envases/día (rendimiento mediante). C.2 Descripción del sistema de control. C.2.1 Objetivos. El sistema de control de velocidad y fase de una máquina IS ( Drive de máquina IS) tiene como objetivo fundamental generar un eje de levas electrónico capaz de cumplir las siguientes funciones: controlar la velocidad y la fase de todos los accionamientos de la máquina: o accionamientos propios de las secciones individuales (gestionados por otro sistema de control -timing-), o accionamientos restantes, propios del Drive: § para entrega de gotas a las secciones individuales (Rotor, Glass Feeder, Gob Distributor), § para evacuar los envases producidos (transportadores, Rueda de Transferencia, Stacker) § para accesorios de seguridad y refrigeración (en tijeras, cazos distribuidor, varios). considerar accionamientos universales. Implica atender a todas las peculiaridades de la mecánica de cada accionamiento, generalizando conceptos donde sea posible. Este planteamiento redunda en la versatilidad del sistema de control (y la simplicidad de configuración, según el caso). permitir configuración completa del sistema. Todos los parámetros que determinan la versatilidad del sistema deben ser accesibles en tiempo de ejecución. aumentar prestaciones respecto a los controles electrónicos anteriores: o evitar desfases descontrolados, usando una arquitectura de control más distribuida y lenguaje de programación versátil para la depuración. o aumentar resolución temporal, disponiendo de reloj base de 40 MHz y programa sobre FPGA o mantener fiabilidad, que es el punto fuerte de los sistemas a evolucionar. C.2.2 Componentes. El sistema de control incluye los siguientes controladores: Cantidad 1 Producto cRIO (NI) 1 Chasis 8 Slots (3 x NI 9425, 3 x NI 9476) 1 FPGA 3MB 1 CPU 9014 (procesador de 400 MHz, HD 2 GB, memoria de 128 MB DRAM) 2 Drive PLC (EPL 10200) (Lenze) 1 Servo posicionador EVS 9325 – EP (Lenze) 1/3 www.ni.com 6 Variadores 8200 vector (Lenze) 1 PC Supervisor (Windows XP) El cRIO (CPU y FPGA) así como el Supervisor han sido programados en LabVIEW 8.5. Los Drive PLCs han sido programados en DDS (Drive Developer System, CoDeSys). C.2.3 Arquitectura funcional y de control. Las funcionalidades se han distribuido de la siguiente forma: Funcionalidad Dispositivo controlador Módulo de generación de sañales patrón o máster cRIO.FPGA Cálculo de frecuencias/desfases de señales patrón o máster cRIO.CPU RT Control del Gob Distributor cRIO.CPU RT Maniobras de seguridad hardware* (incluye Watch Dogs hardware) cRIO.FPGA Maniobras de seguridad software* cRIO.CPU RT Acceso a configuración y a monitorización PC Supervisor (Win XP) Control de ejes (variadores Lenze) Drive PLCs (Lenze) A la vista de los componentes hardware y de la arquitectura de control, es evidente que los productos de NI en este sistema tienen el papel principal. C.2.4 Funcionalidades NI. El sistema aprovecha varias de las funcionalidades que NI suministra con sus productos: Funcionalidades Software. • Programación de todo el equipamiento NI con LanVIEW 8.5, con toda la aplicación integrada en un solo proyecto, accediendo a tres niveles de procesamiento: Aplicación sobre estado sólido (FPGA), Aplicación en entorno de tiempo real (CPU con SO en tiempo real), Aplicación sobre PC Supervisor (CPU con SO Windows XP) • Interacción entre FPGA y Aplicación en CPU con SO en tiempo real (intercambio de variables incluido en las funcionalidades de LabVIEW), • Interacción entre Aplicación RT y Aplicación del Supervisor (intercambio de variables incluido en las funcionalidades de LabVIEW -variables compartidas sobre Ethernet-) Funcionalidades Hardware. • Alta resolución temporal de la aplicación sobre estado sólido (FPGA). • Fiabilidad de la aplicación sobre estado sólido: integra Watchdog hardware* a medida. • Robustez general del equipo de cRIO. C.2.5 Reducción de recursos. Aplicación en FPGA y controlador RT. Nuestra compañía ha realizado, en ocasiones anteriores, aplicaciones con hardware equivalente: CPU de control (con SO en tiempo real) y PAL, con sendas aplicaciones propietarias. Este equipamiento requiere integración entre la FPGA (PAL programada) y el PC de control (con SO en tiempo real) lo que obliga a realizar un desarrollo de harware y software a medida. Dicha integración viene incluida en la arquitectura del cRIO y LabVIEW 8.5. Por otra parte, el uso de la plataforma de desarrollo de NI nos permite: desarrollar la aplicación de FPGA con LaVIEW, descartando la opción de lenguajes de bajo nivel (VHDL) desarrollar la aplicación del controlador con entorno en tiempo real con LabVIEW, descartando lenguaje C y desarrollar drivers de bajo nivel para acceso a hardware. LabVIEW es ampliamente conocido en nuestro departamento de Software. En su conjunto, estas circunstancias nos hacen estimar un ahorro de tiempo de desarrollo de un 30%. Aplicación en PC Supervisor. Una de las potencialidades más económicas en LabVIEW es su versatilidad para realizar programas de supervisión en entornos de control industrial. Nuestra compañía tiene decenas de aplicaciones Supervisoras realizadas con este lenguaje y la consiguiente experiencia acumulada. Frente a otras opciones estándar, estimamos un ahorro de tiempo de desarrollo de un 40% para el caso de la aplicación del Supervisor. D. CONCLUSIÓN. Se ha generado un sistema de control de una máquina IS ( Drive de máquina IS). La parte fundamental del control consiste en un eje de levas electrónico programado íntegramente con LabVIEW 8.5 sobre plataforma cRIO con FPGA. El sistema mantiene la alta fiabilidad de los sistemas anteriores, aumentando la resolución temporal gracias a la velocidad de la FPGA, y aumentando las capacidades de alto nivel gracias a la versatilidad que proporciona LabVIEW para generar aplicaciones sobre un procesador con sistema operativo en tiempo real. Se han alcanzado las especificaciones originales y el sistema queda abierto para su evolución. Información del Autor: Julio A. Suarez Acebal AVACON S.A. Industrialdea,PAB 3-6 Llodio-Alava España [email protected] (mailto:[email protected]) 2/3 www.ni.com Imagen 1: Máquina IS en producción. Legal Este caso de estudio (este "caso de estudio") fue desarrollado por un cliente de National Instruments ("NI"). ESTE CASO DE ESTUDIO ES PROPORCIONADO "COMO ES" SIN GARANTÍA DE NINGUN TIPO Y SUJETO A CIERTAS RESTRICCIONES QUE SE EXPONEN EN LOS TÉRMINOS DE USO EN NI.COM. 3/3 www.ni.com