SISTEMA FLY-BY-WIRE - Cruz de San Andrés
Anuncio

TEORÍA DE RADAR
POR ESA_BUZY
INGENIERO DE TELECOMUNICACIONES
PRESENTACIÓN
Nos complace presentaros este mini-cursillo sobre teoría de radar que el camarada Buzy a
preparado para todos vosotros. Será de interés -sin duda- para todos aquellos que deseéis
profundizar más en el funcionamiento y aspectos técnicos de un moderno radar de pulsos
doppler. Se trata, a nuestro entender, de uno de los artículos más completos que se pueden
encontrar hoy en castellano sobre este tema, fuera del ámbito del sector especializado. Para
su redacción, Buzy se ha apoyado en sus conocimientos técnicos como profesional junto con
textos disponibles en diversas idiomas, y ha conseguido presentarlo al aficionado en lenguaje
común, de fácil comprensión.
El autor comienza con una explicación detallada y rigurosa de un sistema radar de pulsos.
Nos explica los diferentes métodos de búsqueda disponibles en el radar real y una
explicación detallada de los modelos montados en el Flanker-B y el Fulcrum. Además, Buzy
nos explica el funcionamiento de los sistemas opto-electrónicos, alertadores radar y sistemas
de contramedidas del Flanker y Fulcrum, para acabar con unas interesantes generalidades
sobre técnicas comunes de uso del sistema radar. Para los que deseáis conocer las
diferencias entre la aviónica presente en Lomac y la real, éste es un artículo de obligada
lectura.
Para cualquier duda sobre los párrafos más "técnicos" del artículo, tenéis a Buzy a vuestra
disposición en nuestro Foro, donde amablemente responderá a todas vuestras dudas. Damos
paso, sin más, a este excelente artículo.
TEORIARADAR
CONCEPTOS PREVIOS
Bueno a través de lo escrito aquí voy a intentar hacer un “calentamiento” para poder
enfrentarse al artículo de técnicas radar sin salir con dolor de cabeza y sin tener las ideas
mas liadas respecto al funcionamiento de los radares de antes de leer el articulo. Sin más
dilaciones vamos a explicar un par de conceptos:
Lo primero y más importante es el cambio de modo de pensar, del dominio temporal (ciclo
de tiempo que transcurre para que se repita un patrón de señal) al dominio frecuencial
(número de patrones de una señal que se repiten durante un segundo), en este dominio que
a groso modo describe las señales a la inversa del temporal, esto es, donde una señal ocupa
más tiempo su frecuencia será menor “si varía poco (Frec. Baja) la señal dura más (Ciclo en
seg. largo)” el caso contrario es análogo.
Se introduce de este modo el ancho de banda que es como su propio nombre indica el ancho
de banda de frecuencias en el que nuestro dispositivo, en este caso nuestro bonito radar,
funciona correctamente, es decir, el rango de frecuencias en el que conocemos como
funciona el radar y que resultados da, además de ser los óptimos. Sin intentar extenderme
mucho, sabemos que cada tipo de onda está definida a partir de su frecuencia, los radares
aquí estudiados trabajan sobre la Banda X del espectro electromagnético, estas señales
tienen unas determinadas propiedades que las hacen idóneas para conseguir los objetivos
del radar (detectar otros aviones o amenazas terrestres por ejemplo) estas señales
funcionan a unas frecuencias muy elevadas del orden de MHz, (millones de vueltas por
segundo). Este orden de frecuencia produce que trabajar con esa señal a esas frecuencias
resulte muy complicado y muy costoso, básicamente por las interferencias que añadimos a la
señal, por eso lo más fácil es bajar la frecuencia de estas, gracias a propiedades
matemáticas que no tengo ganas de poner aquí…
Intentando no liar más el asunto aparece la frecuencia de la portadora que podemos explicar
como la frecuencia a la que la señal no detecta nada, es la frecuencia alrededor de la cual
trabajamos, un símil bastante bueno es pensar como en las emisoras de radio FM, cada
cadena de radio emite en una frecuencia portadora, si esta frecuencia varía (siempre dentro
del ancho de banda del radar) podremos detectar información, si el receptor sabe
perfectamente cual es la frecuencia de la portadora hablaremos de receptor coherente y si
no la conoce y no la averigua serán receptores incoherentes. Bien pues al bajar la frecuencia
de la portadora de la señal la información que lleva esta señal no se ve alterada (esa
“información” no es más que variaciones de frecuencia que también se ven reducidas al bajar
la frecuencia, pero que mantienen su amplitud respecto a la frecuencia de portadora).
Aquí aparece el término de mezclador, que simplemente es un dispositivo que mezcla dos
señales, una de referencia que es conocida y fija y la que queremos reducir, al mezclarlas y
por las propiedades de velocidad angular, trigonometría y otras cosas más que mejor no
incluir, obtenemos una señal de frecuencia reducida (en realidad obtenemos dos pero sólo
escogemos la pequeña de las dos) esta selección de frecuencia la conseguimos con unos
dispositivos llamados filtros como su nombre indica filtran según que tipos de frecuencias,
dejando pasar sólo un rango de frecuencias, estos dispositivos tienen infinidad de utilidades,
filtrar ruidos (frecuencias que no queremos), seleccionar diferentes señales, etc….
TEORIARADAR
- 2 -
Siguiendo con el tema de las frecuencias y para intentar dejar claro algunos aspectos, esa
señal se puede pasar a un rango de frecuencias (con un mezclador) en los que por ejemplo
trabaje un visor CRT, (un monitor) para poder observar con nuestros bonitos ojos la
información que lleva nuestra señal.
Lo segundo pero no menos importante es el efecto Doppler que se utiliza para detectar a
nuestro enemigo, este efecto es fácilmente observable cuando pasa una ambulancia al lado
nuestro, mientras se acerca las ondas de sonido nos llegan más juntas ya que la ambulancia
se acerca hacia nosotros y nos “lanza” las ondas de sonido esto produce que lleguen más
juntas y por tanto aumente su frecuencia oyendo el sonido mas agudo, al pasarnos ese
sonido pasa a ser más grave debido a que las ondas nos llegan más separadas, pues bien
todo esto es lo que ocurre más o menos en los radares que estamos explicando, solo que en
lugar de escuchar sonido, estos escuchan ondas de la banda X de ondas electromagnéticas,
(el sonido y las ondas EM son tipos diferentes de ondas pero para el caso funcionan de forma
parecida) la diferencia es que nuestros oídos son de escucha pasiva, ya que no tenemos que
producir sonido para percatarnos que una ambulancia se acerca a nosotros a toda leche y
tenemos que apartarnos, en el caso de los radares deben producir ondas EM para poder
recibir el eco y detectar el efecto Doppler producido por algún objeto en movimiento, por eso
podríamos decir que son “oídos” activos. Esa variación de frecuencia viene determinada por
el desfase de frecuencia (como cuando te dicen que estás desfasado queriendo decir que no
vas al tiempo actual, a la moda), el radar detecta ese desfase y gracias a propiedades físicas
estudiadas por el señor Doppler se puede detectar la velocidad a la que se acerca o se aleja
el objeto, la distancia es sencilla de calcular, simplemente midiendo el tiempo de retorno del
eco y calculando la distancia sabiendo la velocidad de las ondas EM (la de la luz).
TEORIARADAR
- 3 -
INTRODUCCIÓN
En este artículo se tratará el sistema de radar de los aviones de combate actuales, como en
otros artículos habrá aspectos aquí estudiados que en Lomac no están simulados, pero que
conocer nos hará sentir ser verdaderos pilotos virtuales y no solo simples jugadores. Nos
enseñará que medidas podremos tomar para poder evadir o al menos retrasar el ser
detectados por los radares enemigos, aspecto muy importante en los combates actuales que
suelen desarrollarse o como mínimo comienzan en BVR (Beyond Visual Range) es decir
conociendo la situación del enemigo por técnicas radar, a una distancia fuera del rango visual
del ojo humano del piloto.
Se empezará con un apartado de teoría básica del Radar de Pulsos, pasando al Radar de
Pulsos Doppler, se explicará diferentes sistemas de búsqueda, después nos centraremos en
el radar del Flanker y del MIG-29, explicando las dos versiones más comunes para estos dos
aviones, la familia Myech y la familia Zhuk, así mismo se explicará de forma resumida el
funcionamiento del sistema optoelectrónico de estos dos aviones, se incluirá también una
breve explicación del funcionamiento interno del alertador de amenazas y de las
contramedidas electrónicas ECM. Finalmente aprovechando lo explicado en los apartados
previos se desarrollarán técnicas de evasión, tácticas para capturar objetivos de forma
eficiente y todo lo referente al sistema radar.
Hay que destacar que numerosos artículos de calidad existentes por la red, cometen errores
a la hora de explicar el radar del SU-27, ya que no diferencian entre las dos familias que se
diseñaron para las diferentes versiones tanto de este avión como para el MIG-29. Estos
errores son debidos en gran medida a la falta de información de la tecnología rusa de la
época, de modo que se conoce casi todo a partir del espionaje por lo que la “fidelidad” de
según que información puede estar muy limitada. Mediante este artículo se intenta explicar
toda la información de forma extendida de las dos familias de radares, los Myech y Zhuk
para el caso del SU-27 y para el MIG-29 los Rubin y Zhuk. Ya que existen errores que
mezclan las familias, en el presente artículo se intenta explicar cada familia con sus
características particulares, para de esta forma poder conocer cual de estas familias son las
que están representadas en Lomac, queda al gusto del lector el comprobar la veracidad de
los datos aquí aportados con los que se simulan en Lomac, a fin de deducir que versión es la
que se más se asemeja. Sobre este aspecto se encuentra una conclusión al final del artículo.
ESA_BUZY
TEORIARADAR
- 4 -
EL RADAR DE PULSOS
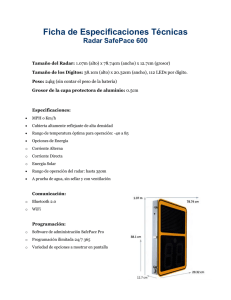
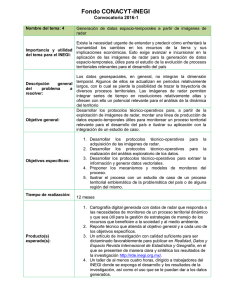
Existen dos tipos básicos de sistemas radar, radar de pulsos y radar de ondas continuas,
debido a que el sistema utilizado en los radar de la mayoría de cazas actuales se basa en
pulsos, pasaremos directamente a estudiar estos últimos, únicamente indicar que para
apreciar la diferencia entre estos dos tipos de energía de ondas, podemos observar la Figura
1 siguiente.
Figura 1
La señal de un sistema radar de tipo pulsos es generada por un transmisor (Tx) y es
irradiada en el espacio por una antena. Comúnmente son usadas las frecuencias que van
desde los 30 a los 60 MHz, debido a que es más fácil trabajar con las señales a menores
frecuencias en comparación con la de transmisión, usando estos rangos pasar a frecuencias
más bajas resulta más sencillo. Si observamos la Figura 2, el duplexor añade la capacidad de
utilizar la misma antena para recepción y transmisión de la señal radar. La señal eco de
retorno es mezclada con la señal generada por el oscilador local (LO) para producir una señal
de frecuencia intermedia (IF) de frecuencia menor que la señal transmitida. IF filter
acondiciona la señal amplificando y filtrando señales extrañas. La señal IF es entonces
enviada al 2nd detector donde es convertida en una señal de baja frecuencia de video. Esta
señal es amplificada y posteriormente proyectada gracias a un display formado por un tubo
de rayos catódicos (CRT). Indicar que el timer/synchronizer controla la frecuencia de
repetición del transmisor.
El sistema de radar tipo pulso es bastante más complejo en su composición, pero contiene
básicamente las partes funcionales explicadas en el párrafo anterior, añadiendo
equipamiento para diferentes propósitos. Por ejemplo, se necesita circuitería adicional para
indicar la posición en azimut coincidiendo con un objetivo radar para el indicador de
movimiento del objetivo (MTI) y para eliminar, filtrando, objetivos fijos, masas de tierra, mar
y fenómenos atmosféricos. Un tracking radar como el de un caza requiere circuitería
adicional para medir distancia, azimuth y elevación del objetivo. En definitiva se necesita
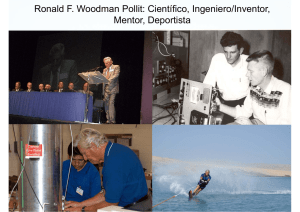
equipamiento para mantener la antena apuntando al objetivo. El esquema funcional básico
del radar de pulsos está representado en la Figura 2.
TEORIARADAR
- 5 -
Figura 2
EL RADAR DE PULSOS DOPPLER
Este sistema radar tiene ciertas ventajas sobre el radar de pulsos básico y el de ondas
continuas. Puede detectar objetivos estacionarios (al igual que el de pulsos básico) además
de en movimiento y puede también determinar la distancia. Puede incluso distinguir entre
dos objetivos con idéntica velocidad radial, pero a diferentes distancias. La velocidad radial
es la velocidad aparente a la que el objetivo se acerca o se aleja del radar (nuestro avión).
En su contra el radar de pulsos Doppler tiene algunas desventajas, estas son; distancias y
velocidades en las que el radar es “ciego”, errores en la entrega de la distancia del objetivo y
reducción del alcance máximo del radar. Pero estas desventajas pueden ser mitigadas con el
uso de circuitería adicional.
El eco de un pulso contiene información de velocidad gracias a la información proporcionada
por la frecuencia Doppler. Pero esta información no es usada en el sistema básico de radar
de pulsos. Utilizando la señal Doppler existente en la señal de eco, el sistema radar de pulsos
puede detectar una señal pobre de objetivos lejanos, incluso rodeados por grandes masas de
tierra y de mar, utilizando el Doppler “shift” (desplazamiento de la señal en fase, desfase).
Estos radares pueden detectar un avión volando muy cerca de una montaña donde la masa
de tierra puede bloquear las señales del sistema básico de radar de pulsos. La circuitería del
radar Doppler debe eliminar objetivos estáticos, pudiendo de esta manera detectar señales
débiles de objetivos móviles.
El alcance del sistema radar de pulsos Doppler es mucho más complejo que el básico de
pulsos o el de onda continua. Un radar de pulsos Doppler percibe la distancia y velocidad del
objetivo utilizando para ello la información de tiempo de la onda, (v=d/t) básicamente. Para
detectar la frecuencia Doppler a partir del eco del objetivo, casi todos los sistemas radares
de pulsos Doppler usan una frecuencia de repetición de pulsos, “pulse-repetition frequency”
(PRF) mucho mayor que el radar básico de pulsos, elevadas PRF disminuyen el tiempo de
repetición de pulsos “pulse-repetition time” (PRT) entre pulsos, posibilitando que el eco de
un objetivo retorne en el tiempo de la siguiente retransmisión, en consecuencia el radar
estaría ciego ante ese objetivo para calcular su distancia, es decir si el eco del primer pulso
vuelve después de la transmisión del segundo pulso existirán ambigüedades en cuanto al
calculo de la distancia. Estas situaciones de ceguera y ambigüedades del radar pueden ser
TEORIARADAR
- 6 -
compensadas variando el PRF sobre un determinado rango. Por ejemplo, la computadora de
control de tiro podría ajustar el PRF del radar basándose en la distancia estimada del objetivo
designado. Si la designación fuera para un objetivo a una distancia de unos 93 Km por
ejemplo, el PRF podría cambiarse para que el segundo pulso no se produjera hasta que no
hubiera pasado tiempo suficiente para que vuelva el eco del primer pulso, teniendo en
cuenta esta distancia y tiempo de adquisición y preprocesado del eco del pulso. En definitiva
cambiando el PRF se evitan las cegueras y ambigüedades del radar de pulsos Doppler.
EFECTO DOPPLER
El efecto Doppler permite distinguir el objetivo pese al debilitamiento de la señal transmitida.
La cantidad de desfase Doppler viene determinado por la velocidad radial del objetivo. Un
objetivo puede moverse en cualquier dirección y en un amplio rango de velocidades, por esto
la velocidad radial puede cambiar considerablemente. Si el objetivo se mueve en un ángulo
de 90º respecto a la dirección de propagación del haz del radar, no se produce desfase
Doppler. Lo mismo ocurre si el objetivo se mueve alejándose a la misma velocidad que el
radar. La cantidad de desfase Doppler depende también del ancho de banda resultante de la
frecuencia transmitida. El desfase Doppler producido a 10000 MHz será más del doble que a
5000 MHz. Para detectar esta diferencia de fase del eco de la señal transmitida, los radares
de pulsos Doppler deben comparar la señal recibida con una señal de referencia que esta en
fase con la señal transmitida (coherente). Esto significa que se debe almacenar y controlar la
fase transmitida para proveer una detección coherente. Un método es utilizar un magnetrón
para el transmisor (Tx), esto requiere que el oscilador local L.O. (que es el encargado de
generar la frecuencia local) sea estable (que su frecuencia no varíe) en una pequeña fracción
del ciclo del pulso. Una muestra de la señal transmitida estable del oscilador local “stable
local oscillator” (STALO) es introducida en el oscilador coherente (COHO). Este oscilador se
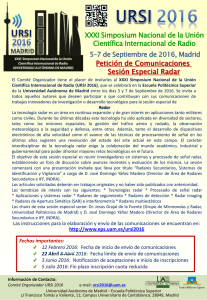
bloquea en esa fase hasta que llega el siguiente pulso a transmitir. La Figura 3 muestra el
diagrama de un indicador de movimiento de objetivo (MTI) con un COHO bloqueado con la
fase del pulso transmitido.
Figura 3
TEORIARADAR
- 7 -
Con el desarrollo de amplificadores de potencia Klystrons y de otras nuevas tecnologías,
existe un método más eficaz en relación a mantener la coherencia en detección. Un
amplificador de potencia del pulso es conectado con un oscilador estable master “stabilized
master oscillator” (STAMO) para generar la señal a transmitir. Por otro lado la señal STAMO
es mezclada con el oscilador IF para generar la entrada del mezclador RF. El detector
finalmente detecta el desfase Doppler y produce la señal de video. Remarcar que los
elementos estacionarios, como la tierra, producen la misma fase/frecuencia del eco de cada
pulso, por esto, el sistema MTI utiliza la cancelación pulso a pulso para eliminar las señales
de retorno de los elementos estacionarios. Acabando con el tema del radar de pulsos Doppler
se incluye la Figura 4 con un esquema del MTI con un oscilador STAMO.
Figura 4
TEORIARADAR
- 8 -
MÉTODOS DE BÚSQUEDA (“SCANNING”)
Para mantener un objetivo capturado el radar necesita de alguna manera mantener el haz
apuntando al objetivo. El sistema radar debe determinar de alguna manera la dirección en la
cual el haz de radar debe ser movido para que el objetivo continúe centrado en el haz. Una
observación visual del CRT puede suministrar información sobre el rango y ángulo con
respecto al centro del haz, entonces el operador puede cambiar la posición del haz de radar
para tener el radar centrado en el objetivo. Los sistemas radar de hoy en día son capaces de
seguir y adquirir (“scanning & tracking”) objetivos automáticamente con la ayuda de
ordenadores. Los dos tipos básicos de búsqueda de objetivos son mecánicos y electrónicos.
BÚSQUEDA
MECÁNICA
La búsqueda mecánica es flexible en el sentido en que la antena puede ser movida de dos
maneras diferentes: (1) El cuerno emisor “feed horn” puede ser movido en relación a un
reflector fijo, o (2) el reflector puede ser movido en relación a un cuerno emisor fijo. La
técnica más común de búsqueda en sistemas de radar de control de fuego es un “feed horn”
movible en relación a un reflector fijo, esta técnica se denomina “conical scanning”. En la
búsqueda mecánica se incluye los términos “nutation”, “nutating waveguide” y “angle
tracking”.
“Nutation”
El proceso de “nutating” es fácil de entender con un ejemplo práctico, sujetando un lápiz con
las dos manos, una mano sujetando la punta y con la otra la parte trasera del lápiz. Si
movemos la punta y mantenemos fija la otra parte, moviéndola en círculo formaremos un
cono. El movimiento descrito por el lápiz es lo que llamamos “nutation”. La punta del lápiz
corresponde con el final del haz de onda. Lo importante de este movimiento es que la
polarización del haz de radar no cambia en un ciclo de movimiento. Es decir el eje que
describe el movimiento del “feed horn” no cambia su orientación ni vertical ni horizontal
mientras el “feed” se mueve. El movimiento puede ser comparado al de una noria de feria; la
orientación de los sillones se mantiene vertical, independientemente de en donde se
encuentren situados estos en la noria.
“NutationWaveguide”
El dispositivo de guía de onda “waveguide feed” es un tubo metálico, usualmente rectangular
en sección transversal. El final del “waveguide” apunta directamente al disco reflector, y la
energía emitida es limitada desde la superficie reflectora. La técnica “Conical scan” se genera
mediante el proceso de “nutation” del “waveguide feed”. En este proceso, el eje del
“waveguide feed” es “nutatted” alrededor de un estrecho patrón. Este movimiento es rápido
(de 30 a 60 Hz) y pequeño en amplitud. Obervando a simple vista parecería que el
“waveguide feed” estuviera vibrando. La amplitud de la “nutation” determina el ángulo del
cono. La amplitud es reducida para mantener la suficiente energía en el centro del patrón
cónico para la búsqueda de objetivos. La Figura 5 muestra el patrón cónico producido por el
“nutating” del haz RF.
TEORIARADAR
- 9 -
“Angle Tracking”
Los circuitos detectores de error en el ángulo del radar proveen señales de corrección a los
circuitos directores y de antena. Las señales de corrección son proporcionales al
desplazamiento del objetivo respecto al eje de “nutation” de la antena. Primeramente el
desplazamiento del objetivo es detectado en rango (distancia) tras lo cual se realiza la
corrección del error. Con el uso de un generador de dos fases de referencia en la antena, es
posible establecer la posición del “feed horn” relativo al eje de “Nutation” de la antena. Este
generador provee los voltajes de referencia para los circuitos detectores de error. El voltaje
de referencia para elevación es un desfase de 90º sobre el voltaje de referencia del azimut.
Cada circuito detector de error compara la fase que da el voltaje de referencia con la fase del
entorno video, esta comparación de fase indica la dirección del error. La amplitud de la
modulación, básicamente la energía del entorno video, es comparada con la amplitud del
voltaje de referencia para determinar la cantidad de error.
BÚSQUEDA
ELECTRÓNICA
Se pueden usar varias técnicas de búsqueda electrónica. Las dos técnicas más comunes en
los radares de control de fuego son búsqueda de monopulso y búsqueda con fase. La
búsqueda de monopulso no mueve el haz transmitido, en lugar de eso la señal de eco es
explorada y comparada. En cambio, en la búsqueda por fase se produce un movimiento del
haz de radar con respecto al eje de la antena. Así mismo, la búsqueda electrónica incluye la
de técnica Conical-Scan_On-Receive (COSRO), explicada más adelante.
Con la búsqueda de Monopulso es posible obtener el rango, la dirección y la información del
ángulo de elevación del objetivo, a partir de cómo su nombre indica un pulso simple. Este
tipo de radar rastreador normalmente produce un haz estrecho de pulsos de energía RF
(frecuencia radio) con un Pulse-Repetition-Rate (PRR) elevado. Cada pulso es dividido en
cuatro señales que son iguales en amplitud y fase. Las cuatro señales sin irradiadas al mismo
tiempo desde cada uno de los cuatro “feed horns” que estan agrupados en un cluster. La
energía irradiada es entonces enfocada en un haz gracias a una lente de microondas. Al
volver, la energía reflejada desde el objetivo es reenfocada por las lentes microondas hacia
los “feed horns”. La cantidad de energía total recibida por cada “feed horn” varía
dependiendo de la posición del objetivo en relación con el eje del haz. En la lente microondas
del radar tiene lugar una inversión de fase, parecida a la que se produce en una cámara de
fotos. La amplitud de la señal recibida en los otros “feed horns” es continuamente
comparada con la recibida en los otros “feed horns” para producir las señales de error que
indican la posición relativa del objetivo en relación al eje del haz. Los circuitos de los servos
de ángulo reciben estas señales de error y corrigen la posición de la antena radar para
mantener el haz en el objetivo. Destacar que existe una ventaja de esta técnica de
monopulso sobre otras técnicas radar que usan búsqueda cónica es que las medidas
angulares instantáneas no se ven afectados por errores causados por la “scintillation” del
objetivo, definido como la rápida fluctuación de la amplitud de la señal de eco cuando el
objetivo maniobra y se mueve, el resultado son diferentes haces radar de diferentes áreas
del objetivo que causan reflejos aleatorios los cuales pueden producir errores de
seguimiento. El radar de búsqueda de monopulsos no se ve afectado por este problema ya
que cada pulso provee una medida angular sin tener en cuenta el resto de información del
tren de pulsos, es decir, la “scintillation” no afecta a las mediciones. Una ventaja adicional
viene del hecho de que no es necesario una búsqueda mecánica como sería el típico
buscador. La figura 6 muestra las variaciones de la energía del monopulso con respecto a la
posición del objetivo.
La búsqueda por fase se utiliza en antenas dispuestas en array. Este método controla la fase
de las señales RF producidas por múltiples “feed hoens”, dipolos o radiadores. La posición
TEORIARADAR
- 10 -
angular de haz es determinada por la fase relativa de la señal de cada elemento. Cuando la
fase de las señales cambia, el haz puede ser redireccionado sin tener que mover la antena.
Otro método de fase utiliza cambios de frecuencia. Cambiando la frecuencia cambia la
longitud de onda, pero con una longitud de onda fija al variar la frecuencia varía la fase. El
array está dividido en cuadrantes, a su vez cada cuadrante equivale a uno de los cuatro
“feed horns”. La suma de todos los cuadrantes es comparada con la suma y resta de los
diferentes cuadrantes, como una búsqueda monopulso.
Esta técnica es adaptable también a sistemas de antena únicamente receptores ConicalScan-On-Receive-Only (COSRO). Esta técnica es usada con transmisiones monopulsos y con
un haz simple de transmisión. Se producen errores en el ángulo del mismo modo que el caso
de la búsqueda cónica. Sin embargo, con la búsqueda CORSO es menos efectiva que la de
monopulso, ya que se requiere gran cantidad de pulsos para producir el entorno que produce
el eco del objetivo. Mientras que esta técnica es más efectiva si es usada con radares de
ondas continuas CW que usan una antena activa separada, esta técnica puede ser usada
como un método de seguimiento alternativo, como una técnica de protección electrónica.
Cassegrain Antenna
Este tipo de antena es el utilizado en casi cualquier radar de avión de combate actual, está
formado por un plato parabólico combinado con un subreflector hiperbólico. Este sistema
produce una mayor eficiencia que otros tipos, ya que el ángulo del frente de onda que entra
en el “feedhorn” es menor, normalmente enfocado centralmente.
TEORIARADAR
- 11 -
RADAR DEL SU-27 “FLANKER-B”
N001 / MYECH / RPLK-27
NATO "Slot Back"
El radar N001 para el SU-27 fue diseñado por Viktor Grishin, impulsando a la USSR, el diseño
original conocido como Myech se suponía que se basaría en la tecnología del programa del
radar experimental Soyuz. De la NPO Istok. Así mismo se intento que tuviera aspectos
comunes con el radar del MIG-29 el N019 Rubin.
El desarrollo no fue un camino de rosas precisamente. Originalmente se intento que superara
las capacidades del AN/APG-63 del F-15 , con un rango de detección de 200 Km, aunque
finalmente esa meta resulto imposible de conseguir para el equipo de NIIP. Del mismo modo
se intento usar un nuevo diseño de antena, ofreciendo búsqueda electrónica en elevación y
búsqueda mecánica en azimut. De esta manera debería ofrecer una excelente capacidad de
captura de múltiples objetivos. Este diseño resultó ser demasiado ambicioso, simplemente
resultó imposible de realizar para una producción en masa en ese estado de desarrollo de la
electrónica Soviética, a principios de los años 80. En Mayo de 1982, se decidió que los
diseños del ordenador digital y la antena del NIIP eran simplemente inalcanzables, ni tan
siquiera para un futuro cercano.
El Phazotron N019 fue rediseñado a partir de una versión mejorada de la antena Sapfir-23ML
para resolver algunos problemas de la antena. Se decidió por tanto usar la mayoría de
componentes del radar N019 para el N001, incluyendo una copia a escala de la antena y el
procesador TS100. En Mayo de 1983 el rediseño se completó, resultando en un radar que ni
se acercaba a lo que en un principio se pretendía. En lugar de 200 Km, el rango de detección
se quedó alrededor de 140 Km en el caso de un avión grande (como un cazabombardero B52).
En 1985 se le ordenó a la NIIP mejorar el funcionamiento del N001. El trabajo se centró en
el nuevo N011 para equipar el SU-27M, y los problemas con el N001 perduraron. Pese a que
el SU-27 entrara en servicio en 1986, el radar no fue finalmente aceptado hasta 1991.
El N001 tiene una antena de 1,075 metros. Un diseño de pulso-doppler con búsqueda
electrónica de Monopulso para el seguimiento, operando en la banda de 3 cm utilizando altas
y medias PRFs para una máxima capacidad de observación hacia abajo “lookdown”, el N001
tiene un rango de búsqueda de 80-100 Km sobre un objetivo de 3m2 RCS (Radar Cross
Section) en orientación de hemisferio frontal y 140 Km sobre un bombardero, como un B-52.
Puede rastrear un objetivo de 3 m2 a partir de 65 km. En persecución, es decir hacia el
hemisferio posterior el rango de búsqueda queda reducido a 40 km. Limites en azimut son
TEORIARADAR
- 12 -
+-60 grados. Puede rastrear fuentes con ECM y pasar la información del objetivo al sistema
IRST (InfraRed Search/Tracking).
La potencia efectiva transmitida es de 1kW (igual que el N019)
MTBF (Mean Time Before Fail) tiempo medio antes de fallar es 100 hours.
El datalink se usa para actualizar los misiles de guía inercial semiautomática (SARH) como el
R-27. El Birzuya command link system que está integrado en el flanker puede dirigir
automáticamente el avión hacia un objetivo aéreo usándolo en conjunción con el AWACS y
un centro CGI. Esto da la posibilidad al flanker de interceptar un objetivo en modo “stealth” ,
el objetivo solo observa que está iluminado por el AWACS o el centro CGI y desconoce que
hay un flanker preparado para disparar sus misiles sobre él.
TEORIARADAR
- 13 -
RADAR DEL MIG-29
N019 / RUBIN / RPLK-29 / S-29 / SAPFIR-29
NATO: "Slot Back"
Basado en el trabajo del radar experimental (Soyuz de NPO Istok)*, al grupo de desarrollo
Phazotron NIIR le fue asignado la producción de un moderno radar para el MIG-29.
Originalmente se intento que tuviera una antena plana y procesamiento digital de la señal, y
un rango de al menos 100 km sobre un caza como objetivo, pronto resulto ser una meta
inalcanzable, al menos para un radar que fuera en la nariz de un MIG-29. Phazotron NIIR
invirtió en una versión de antena de tipo Cassegrain usada eficazmente en el Sapfir-23ML,
con un procesador de señales con un diseño basado en Argon, el ordenador digital Ts100.
*Soyuz
OKB: NPO Istok
Radar experimental de finales de los 70 y principios de los 80, posiblemente
basado en información robada del APG-65, NPO Istok diseñó y construyó 3
prototipos de radar con procesadores digitales de señal, antena plana y
capacidades de mapeo terrestres, una de estas versiones se probo en una
plataforma aérea (un avión). No obstante , sólo fue una tecnología de
demostración y los radares producidos N001 y N019 que en adelante entraron
en servicio fueron menos sofisticados. Esta tecnología fue completamente
introducida en los radares N010 Zhuk y N011.
Modelo
TEORIARADAR
- 14 -
Master oscillator N-019
Transmitter N-019
TS-100 processor
Microwave receiver N-019
El radar N019 pesa en total unos 385 kg. Es un radar de pulsos Doppler operando alrededor
de la banda X de longitud de onda de 3cm. Utiliza 3 modos básicos de operación. Modo radar
de altas PRF para una detección óptima de objetivos lejanos, modo PRF medias para
detección de objetivos en retroceso y un modo de altas/medias PRF para todos los rangos.
Utiliza unos canales de guarda para suprimir interferencias de los “sidelobes” (interferencias
entre frentes de onda adyacentes). Y la iluminación SARH y canales principales utilizan
diferentes frecuencias dentro de la banda X y están multiplexados en tiempo. Cada avión
puede ser configurado en tierra a usar diferentes frecuencias para evitar interferencias
mutuas durante operaciones en grupo.
TEORIARADAR
- 15 -
El ciclo de búsqueda es de 2.5 a 5 segundos dependiendo del modo.
El ancho del haz es de 3.5º, que determina la mínima separación de dos objetivos en
azimuth. Este haz se establece hasta 120º en ladeo y +40º/-30º en pitch (altura).
El N019 es un diseño híbrido analógico/digital, con una unidad de procesamiento digital NII
Argon Ts100. El procesador Ts100 puede realizar 170.000 operaciones por segundo, tiene 8K
de memoria RAM y 136K de ROM, y está construido utilizando ICs con escala media de
integración. Está basado en la arquitectura propiedad de POISK desarrollada en NII Argon,
los cuales adaptaron las instrucciones para configurar las funciones de control del sistema,
expandiendo las instrucciones básicas a partir de microcódigos inherentes en operaciones
específicas (básicamente rediseñaron las microinstrucciones elementales para formar
instrucciones más complejas para controlar los sistemas). Comparado con máquinas que
usaban los mismos elementos pero con las instrucciones genéricas (por ejemplo la
arquitectura Argon-15-A del MIG-31) la capacidad de procesamiento fue mejorada de 1.5 a
2.5 veces mas y el código fue 3 a 5 veces más compacto, haciendo que el Ts100 fuese más
económico de producir. El ordenador Ts100 pesa 32 kg.
TEORIARADAR
- 16 -
EL RADAR ZHUK, A FONDO
ZHUK / N010
OKB: Phazotron NIIR
Chief Designer: Yuri Guskov
Zhuk (Phazotron website)
El radar Zhuk original fue diseñado a mediados de los 80 para el MIG-29M, una versión
mejorada del MIG-29 para intentar rectificar los defectos del original MIG-29. Probado desde
1987 en un MIG-29(9-16) especial de pruebas y concebido por el programa NPO Istok
Soyuz, se intentó que el Zhuk fuera el primer radar multimodo desarrollado en la Unión
Soviética, con un completo rango de aire-aire y aire-tierra dando la capacidad de ejecutar un
amplio rango de tareas. Usa la serie de procesadores mejorados TS101 y una antena
“slotted”. Posteriormente los cambios políticos de principios de los 90 significaron que el
MIG-29M fuese aplazado y posteriormente cancelado. La fuerza aérea Rusa no se impresionó
especialmente con el radar Zhuk original, ya que no incrementaba la detección aire-aire y el
rango de seguimiento, impidiendo la completa explotación de las capacidades de los misiles
R-27 y R-77. También reseñar que el prototipo del Zhuk no tenía completamente
implementados los modos aire-tierra.
Phazotron diseño y continua diseñando un conjunto de radars basados en el Zhuk, ajustados
para su instalación en diferentes aviones y con una amplia variedad de capacidades. El Zhuk
es un radar algo largo en su forma para su clase de capacidades, como era de suponer con la
tosca y voluminosa electrónica de la Unión Soviética de esos tiempos que se diseñaba.
Dependiendo del rango, el radar tiene +20, +60 o incluso +90 grados de ángulo de
detección/seguimiento en azimuth y dos o 4 barras en elevación (+60/-40 grados máximo),
con una antena de 680mm de diámetro. El radar puede operar con los nuevos misiles R77(AA-12) de búsqueda radar activa. Pueden lanzarse 2 misiles al mismo tiempo contra dos
objetivos separados y otros dos acto seguido. El radar trabaja en la banda X. Tiene una
potencia punta de 6kW y 1kW de media. Su pero es de 250 kg.
TEORIARADAR
- 17 -
MODOS ARE-AIRE:
•
•
•
•
•
•
•
•
Búsqueda de velocidad
RWS (“Range-While-Search”)
o Vista arriba: 80-85km de rango
o Vista abajo de frente al objetivo: 80-85km de rango
o Vista abajo por detrás del objetivo: 40-50km de rango
TWS (“Track-While-Scan”)
o Seguimiento de 10 a 12 objetivos simultaneamente, selección automática de
los más peligrosos, 2 o 4 de ellos, capturar hasta los 60 km
STT (“Single Target Tracking”)
Raid assessment
Close combat modes
o Wide angle
o Vertical scan
o HUD view
o Boresight
o Slewable
Reconocimiento de tipos de objetivos y su calidad
Detección y captura de helicópteros de los alrededores.
MODOS AIRE-TIERRA:
•
•
•
•
•
•
•
•
•
•
•
•
Real beam mapping
DBS (Doppler Beam Sharpening) mapping
SAR (Synthetic Aperture Radar) ground mapping
Multiple target tracking
Map freeze and zoom
Sea surface surveillance: Range 120-150km vs a large ship.
Ground Moving Target Indication
Ground ranging
Ground speed measurement
Beacon interrogation
Terrain avoidance
Employment of unguided munitions on receipt of radar information ('blind'
bombing").
Tras la ruptura de la Unión Soviética, Phazotron desarrolló una serie de radares basados en
el Zhuk. La división de Phazotron y NIIP (responsable posteriormente del desarrollo del N011
para el SU-27M) produjo una rivalidad en el diseño de las diferentes versiones de Zhuk, para
adecuarlas a las diferentes variantes avanzadas del SU-27.
TEORIARADAR
- 18 -
ZHUK / N011
Zhuk-27
Zhuk-27 (Phazotron website)
Este radar representa un reensamblaje del diseño básico del Zhuk para la forma del SU-27.
Esta versión dispone de una antena más larga que el modelo Standard, quizá también con
mayor potencia de transmisión. Los limites de búsqueda están ligeramente reducidos, ±85°
en azimuth y el peso incrementado hasta 275 kg. Estos cambios incrementan el rango de
detección para un caza pequeño, como un F-16, hasta los 130km y seguimiento hasta 90
km.
MODOS RADAR
(DESCRIPCIÓN BASADA EN LA VARIANTE EXPORTADA N-019EB)
Limites de búsqueda del radar en azimuth: +-65º
Limites de búsqueda del radar en elevación: +56, -36º
• Modo “V”(Vstryehchya): Encuentro
El modo encuentro es el modo principal en interceptación, este modo proporciona los
mayores rangos de detección y las menores señales falsas de retorno.
Modo de altas PRF para poder detectar objetivos únicamente en el rango de velocidades de
230 – 2500 km/h en altitudes de 30m hasta 23000m. El display esta calibrado para tener un
rango máximo de 150km.
El objetivo puede estar a unos 10000m por encima o 6000m por debajo de la altitud de
nuestro avión.
Un caza de 3m2 de RCS puede ser detectado a 50-70km y capturado a 40-60km. Si el host
(nosotros) está volando por debajo de 3000m el rango de detección se reduce a 40-70km y
el de captura a 30-60km.
TEORIARADAR
- 19 -
Cuando el sistema se encuentra bajo el control del CGI mediante el Datalink se usa una
pasada de búsqueda con 6 barras. Esta búsqueda cubre un sector de 40º en azimuth en
rangos de hasta 30km, 30º en rangos de 30-55km y 20º por debajo de 55km. La distancia al
objetivo y otra información usada es proporcionada por el comando CGI y la dirección de
búsqueda se ajusta automáticamente por el comando CGI hacia el objetivo deseado.
Cuando el sistema no está bajo el control del CGI a través del Datalink se utilizan 4 barras
de búsqueda para adquirir objetivos manualmente. Este modo busca constantemente 50º en
TEORIARADAR
- 20 -
azimuth, con el piloto controlando manualmente la dirección de búsqueda. Se supone que la
dirección acertada del objetivo es suministrada por control de tierra a través de comandos de
voz.
No existe un patrón de búsqueda en el rango en azimuth. El área de búsqueda de 130º está
dividida en 3 sectores. El sector izquierdo va de -65º a -15º, el central cubre -25º a +25º y
el derecho +15º a +65º, proporcionando transposición para cubrir perfectamente los 130º.
Se pueden diferenciar objetivos individuales si están separados en azimuth y 5-6 km en
rango. El error de medida del rango de un simple objetivo puede llegar a ser superior a 8km,
el cual debe ser comparado con la información que proporcione el control CGI.
El mínimo rango medible en este modo es 5km.
Lockon y transición al modo de seguimiento tarde de 2 a 7 segundos en el modo de
encuentro.
Reseñar que en modo de encuentro un objetivo que cambie su dirección a posición posterior,
(mostrando su cola) puede perderse en modo de seguimiento si no está lo suficientemente
cerca.
• MODO “D “(DOGON) PERSECUCIÓN
El modo con PRF medias se utiliza para capturas de hemisferio frontal y posterior. En la
práctica se utiliza sólo cuando es necesario. Ya que es propenso a mostrar objetivos falsos a
altitudes bajas. Tierras pantanosas, bosques frondosos y llanos inundados producen estos
falsos objetivos. Cuando se reciben múltiples señales de retorno falsas el piloto debería
comparar los objetivos visibles con los calculados y suministrados por el datalink desde el
control GCI para determinar el objetivo correcto.
El display está calibrado a un rango máximo de 50km
Detección de objetivos desde 30m hasta 23000m de altitude, a velocidades de 210-2200
km/h
El objetivo puede estar a unos 10000m por encima o 6000 por debajo.
Un caza de 3m2 de RCS puede ser detectado a 25-35 km y capturado a 20-35km si se está
volando por encima de 3000m. Cuando se vuela entre 1000-3000m de altitude, el rango se
reduce a 20-35km en búsqueda y 18-35 para captura. Cuando se vuela entre 500-1000m el
rango se ajusta a 15-30km en búsqueda y 13-25 en captura.
TEORIARADAR
- 21 -
Se usan dos patrones de búsqueda.
Si el objetivo se encuentra en un rango superior a 20km la búsqueda cubre 30º en azimuth y
13,5º en elevación
Cuando el rango al objetivo es menor de 20km, la cobertura de búsqueda es de 40º en
azimuth y 16,5 en elevación.
Los objetivos individuales pueden ser detectados si se encuentran separados entre si entre
3-4km en modo de persecución.
Errores en las medidas de rango pueden llegar a ser de hasta 8km, pero no hay un rango
mínimo.
Captura y transición a modo de seguimiento en modo persecución (“pursuit”) tarda alrededor
de 1-4 segundos.
Cuando se selecciona el modo Cooperación, el radar automáticamente cambia a un modo
equivalente a persecución, buscando con el IRST.
TEORIARADAR
- 22 -
• Modo "SP"
Búsqueda libre
La información de este modo no se encuentra documentada. Se cree que utiliza un modo de
altas PRF similar al modo de encuentro. Solo está disponible en las máquinas soviéticas, con
mejores capacidades contra ECM.
• Modo "AVT" (Aootomaht) Automático
El modo automático usa una mezcla de altas y medias PRF para proporcionar una detección
óptima en todos los rangos. Cada linea de búsqueda es alternada con altas y medias PRF,
aunque si el rango está por debajo de 10km se usa solo PRF medias.
El display está calibrado para un rango máximo de 100km. Los objetivos pueden ser
detectados teóricamente a rangos similares a los modos encuentro y persecución
dependiendo de la dirección del objetivo.
En el modo automático de un objetivo el seguimiento continua mientras que la dirección del
objetivo proporciona un rate de acercamiento o alejamiento alto.
Los pilotos consideran este modo problemático, sobrecargando el ordenador y generando
numerosos retornos falsos. En teoría es usado en combinación con la información de
estaciones de tierra suministrando la dirección del objetivo.
• Modo "SNP" (Soprovazhdenie Na Prokhode) Seguimiento mientras
se busca
Este submodo puede activarse en modo de encuentro y persecución únicamente. Admite el
seguimiento de hasta 10 objetivos, midiendo su posición angular, rango y rate de
alejamiento. EL objetivo con mayor rate de acercamiento es designado automáticamente
como el más peligroso y es automáticamente señalado en el display. El piloto puede suprimir
la selección automática si desea capturar otro objetivo.
El ordenador TSVM calcula los parámetros de lanzamiento de misiles para el objetivo más
peligroso. Cuando el rango hasta el objetivo se aproxima al rango máximo de alcance del
misil, el radar deja de buscar objetivos y cambia a un patron de búsqueda de 8º por 40º en
la dirección del objetivo asignado. Si el objetivo es localizado el radar cambia a seguimiento
simple de un objetivo y todos los otros contactos son descartados. Si no se encuentra ningún
objetivo en 3 ciclos el radar vuelve al modo de búsqueda y los contactos son restaurados.
Este modo está diseñado para poder lanzar misiles a un rango máximo con lo que evitamos
en lo posible ser detectados por el objetivo y volviendo al modo de persecución simple lo
más rápido posible.
TEORIARADAR
- 23 -
• Modo "BL BOY" (Bleezhniy Boy) Combate cerrado
El modo de Combate Cerrado elimina todos los otros modos. Utiliza un frente de búsqueda
vertical que mide de ancho 6º (2 líneas de búsqueda) con un ciclo de búsqueda de 2.5
segundos y proporciona una captura semiautomática de objetivos. El objetivo más cercano
que esté dentro del área de búsqueda será bloqueado al pulsar el botón de “lockon” sin tener
que designarlo previamente.
Este modo puede bloquear desde 450m hasta 10km de rango, y seguir un objetivo
bloqueado por debajo de 250m.
La transición de bloqueo y seguimiento dura alrededor de 1-2 segundos en este modo.
TEORIARADAR
- 24 -
SISTEMA OPTOELECTRÓNICO SU-27
OLS-27 / IZDELIYE 36SH
El dispositivo combinado IRST/LR del SU-27, similar al KOLS del MIG-29 pero mucho más
sofisticado utilizando un sensor refrigerado con un ancho de banda más ancho. El “Tracking
rate” está sobre los 25º/seg. Con un rango de 50 km a hemisferio frontal y 15 km en
hemisferio posterior. El láser buscador de rango opera entre 300-3000m para objetivos
aéreos y 300-5000m para terrestres.
Los límites de búsqueda son ±60º en azimuth, +60/-15 en elevación. Se usan 3 tipos de
FOV (Formas de área de búsqueda), 60º x 10º, 20º x 5º y 3º x 3º. El rango de detección es
de hasta 50km, aunque el rango del láser es efectivo desde 300-3000m. La precisión del
seguimiento en azimuth es de 5 seg, y la precisión de los datos obtenidos va de 3 a 10m.
Los objetivos son mostrados en el mismo CRT que el radar. Su peso es de 174 kg.
TEORIARADAR
- 25 -
SISTEMA OPTOELECTRÓNICO MIG-29
KOLS / IZDELIYE 13SH / OEPS-29
OKB: NPO Geophyizika
Encajado en el MIG-29A, KOLS es una combinación de dispositivos IRST/LR. Adquisición de
objetivos de forma independiente o a partir del radar. Puede detectar un avión sin
postcombustión en hemisferio frontal en un rango de 12 a 18 km. El láser puede detectar el
rango desde 200 a 6500m con una precisión de 3m. Los límites de búsqueda son ±30° en
azimuth y -15º/+30º en elevación.
El modo de FOV largo es de ±30° azimuth y +30°/15° elevación. En pequeño FOV los límites
de búsqueda son ±30° en azimuth y ±15° en elevación. El modo de combate cerrado busca
en +16º a -14º x 4º. En modo Lock-on 6º x 4º. El “Tracking Rate” es de hasta de 30º/seg.
El KOLS es capaz de discriminar bengalas únicamente si las “signature” (firma infrarroja)
combinadas de las bengalas son menores que la del objetivo.
Los objetivos son visualizados en el mismo display que el radar.
TEORIARADAR
- 26 -
ALERTADOR DE AMENAZAS
BERYOZA / SPO-15 / L006
Receptor híbrido analógico/digital alertador de radar. Es el sucesor del Sirena-3M. El
convenio de especificaciones data de 1969 y el proyecto empezó en 1970. Su entrada en
servicio fue a finales de los 70.
El sistema SPO-15 comprende los siguientes componentes:
-
Antenna delantera en azimuth
Centro de control
Estación indicadora en cabina
Conversores HF (altas frecuencias)
Receptor
Ordenador
Antena de ángulo de elevación
Fuente de alimentación
Antena de rango lejano
Las luces amarillas circundantes representan el ángulo de azimuth de las amenazas más
peligrosas. La luz permanece encendida unos 8-12 segundos, es decir con un rate de
búsqueda menor que este tiempo la luz permanecerá encendida. Las luces verdes interiores
muestran los demás objetivos. Si el emisor está en una dirección entre dos luces las dos
luces adyacentes se iluminaran a la vez. La seis luces de la parte baja del indicador
representan los 6 tipos de radar de amenazas. El aro amarillo interno de luces amarillas
TEORIARADAR
- 27 -
indican la fuerza de las señales recibidas con destellos sucesivos. Además de los indicadores
visuales se produce un sonido de baja frecuencia mostrando las mismas características que
la señal radar detectada.
Si el radar hostil cambia a modo de seguimiento (STT) el círculo rojo destellará y sonará un
tono de audio alto y continuo.
Cuando se detecta el lanzamiento de un SAM se emitirá un agudo sonido discontinuo.
El Beryoza es capaz de detectar señales de radar enemigos a un 120% de la distancia sin
que el caza enemigo pueda lanzar ningún misil.
Los radars operando en TWS (seguir mientras busca) no se pueden distinguir del modo de
búsqueda normal.
La prioridad de la amenaza se determina simplemente por el tipo de objetivo, el grado de
amenaza va de de derecha a izquierda, las amenazas más importantes empiezan por la
izquierda y las menos están a la derecha. De este modo tenemos: En orden de izquierda a
derecha, amenazas aereas, SAM largo alcance, SAM medio alcance, SAM corto alcance.
Bandas cubiertas: 4.45-10.35GHz
Dirección: +-10 deg (front)
Ancho de banda: 20Khz
Peso: 25kg
•
•
•
•
•
•
•
SPO-15 (L006)
SPO-15S Busca en frecuencias de 4.75 a 10.7 GHz.
SPO-15L
SPO-15SL
SPO-15LM (L006LM)
SPO-15LM (L006LM/101) Versión reducida para exportar.
SPO-15LM (L006LM/108) versión incluida en el MiG-29SE para exportar.
TEORIARADAR
- 28 -
CONTRAMEDIDAS ELECTRONICAS ECM
SORBTSIYA SPS-170
SERIES
(L005S)
Trabaja en la banda de infrarrojos altos y consiste en dos “pods” instalados en las puntas de
las alas del SU-27, una interficie para la conexión con el ordenador de misión y un panel de
control en el cockpit. Cada “pod” tiene antenas de tipo phased-array en su parte posterior y
anterior. La parte media del Sorbtsiya contiene los receptores, emisores y generador de
técnicas. Las técnicas de interferencia utilizadas son ruido de interferencia y terrestre
robusto. La antena electrónica phased-array detecta un amplio rango de frecuencias y emite
más de diez haces de interferencias en diferentes direcciones contra amenazas aire-aire y
tierra aire.
La instalación de los “pods” en las puntas de las alas tiene muchas ventajas según explica
Boris Akinstin, diseñador jefe en KNIRTI. Primero, el espacio entre los “pods” permite una
mejor cobertura del entorno alrededor del avión. Además el diseño del “pod” permite
escuchar y producir interferencias a una amenaza a la vez. Por ejemplo, cuando se entra en
la zona de amenaza, la parte delantera del “pod” derecho estará escuchando, buscando una
amenaza tierra-aire, mientras la parte delantera del “pod” izquierdo produce el “jamming”
las interferencias y ruido. Esta división del trabajo ocurre de igual manera en la parte trasera
de los “pods”.
SPS-171/172
TEORIARADAR
- 29 -
TÉCNICAS DE RADAR. GENERALIDADES
A partir de todo lo explicado anteriormente podemos aprovecharnos de aspectos y
características para nuestro propio beneficio. Por ejemplo aprovechar el efecto Doppler para
causar cegueras en los radares enemigos situándonos perpendiculares al avión enemigo que
nos está iluminando con su radar. Aprovechar esta capacidad en el momento adecuado es
importante, aprovechando esos instantes para realizar una maniobra que será o debería ser
casi siempre decisiva, podemos aprovechar también las contramedidas electrónicas del SU27 para cegar por unos instantes al enemigo, es importante remarcar que estas medidas son
temporales y por norma general tardarán poco en volver a encontrarnos y capturarnos,
recordemos que si estamos frente a aviones del bando atlántico y consiguen dispararnos un
misil del tipo disparar y olvidar las cosas cambian, entrando en otro tema de evasión de
misiles que queda fuera de este artículo de radares. Otra manera de mejorar nuestro sigilo o
reducir la precisión con la que nos puedan capturar es girando 180º enseñando nuestro
trasero al enemigo esto reduce el rango de búsqueda y puede producir suficiente ceguera
para aprovecharse en alguna maniobra de ataque o incluso de huida. Volar a baja cota puede
camuflarnos algo frente a los radares enemigos pero puede ser una decisión delicada ya que
si somos descubiertos las acciones quedan muy limitadas por encontrarnos tan cerca del
suelo.
Centrándonos ahora en el ataque, hay que tener en cuenta el efecto de trabajar en rangos
de búsquedas lejanos y cercanos, ya que estos hacen que varíen las PRF entre un modo y
otro, lo que puede acarrear que veamos un objetivo cercano si estamos en un modo con un
rango cercano, pero si cambiamos a otro modo de alcance más lejanos puede que dejemos
de ver a este objetivo cercano, por esta razón es importante centrarnos y asignarnos
prioridades de objetivos. Hay que tener en cuenta que nuestros objetivos pueden utilizar las
mismas características que nosotros podemos utilizar para evadir el radar. El SU-27 y MIG29 tienen unos radares bastante anticuados en comparación a los de los F-15, F-16, etc…
Esto se traducirá en que perdamos bastante a menudo a los objetivos, por este motivo
deberemos recordar la dirección en la que volaban y la zona, para posteriormente saber
donde dirigir nuestro radar y volver a localizarlos. Recordar que nuestros radares son
bastante manuales, por lo que tendremos que estar constantemente moviendo el haz del
radar de arriba abajo y de derecha a izquierda. Muy importante es guiarse por el alertador
de amenazas ya que es el que nos indica fielmente desde donde nos están iluminando,
incluso sin que nosotros podamos verlos en nuestro radar, ese indicador es bastante fiable
así que siempre es importante echarle un ojo. Mucho cuidado con las contramedidas
electrónicas que disponemos, ya que al igual que a través de generar ruido podemos cegar
los radares enemigos que esten cerca, podemos del mismo modo delatar nuestra presencia a
grandes distancia a nuestro enemigo, recordar pues que es una contramedida para radares
que se encuentren relativamente cerca, cuando estén apunto de capturarnos o estemos en
una zona con numerosas fuentes de radar que nos están iluminando y por tanto, el enemigo
conoce de sobra nuestra localización, viene a ser como encender una linterna muy potente
para cegar a quien nos intenta apuntar no verá bien, pero sabrá muy bien donde estamos.
Un aspecto bastante negativo de los SU-27 es el no disponer de radar con capacidad de
suministrar información a misiles de disparar y olvidar, de esta manera conseguir que el
primer misil disparado de en el blanco será casi una utopía, de este modo aprovechando la
capacidad del SU-27 de llevar una gran cantidad de misiles, deberemos disparar
normalmente un par de misiles, el primero hará que el enemigo ponga en acción tácticas
evasivas ya sean para cortar el bloqueo del radar o de esquivar el misil, dejando en
ocasiones al enemigo con menos energía, aunque esto ya entra en otro tema también,
podremos acertar con el segundo o incluso necesitaremos un tercer disparo.
TEORIARADAR
- 30 -
Por último como parte final explicar un pequeña táctica “stealth” que nos puede ser muy útil
contra esos fastidiosos misiles de disparar olvidar, para ello no daremos ni tiempo a que nos
bloqueen, la táctica es aprovechar AWACS y el modo IRST/LR, por ello, si no disponemos de
AWACS será casi imposible desarrollar esta táctica. Empezamos por visionar los objetivos
gracias a la información suministrada por el AWACS, los aviones enemigos sólo verán que
están siendo iluminados por un AWACS, lo que tendremos que hacer es intentar imaginarnos
a partir de la MFD del radar y viendo su posición como serán sus conos de búsqueda, de esta
forma intentaremos entrar por detrás lógicamente, deberemos estar siempre alerta del
alertador de amenazas para ver si hay otras fuentes iluminándonos, si hubiera un AWACS
enemigo ya os podéis imaginar lo que ocurriría, de esta manera podremos entrar por cola a
nuestros enemigos, cuando entremos en el rango de nuestro sistema optoeléctronico,
deberemos activarlo teniendo seleccionado previamente los misiles con cabeza buscadora de
infrarrojos y disparar rápidamente los misiles contra los objetivos enemigos sin darles tiempo
a nada, asignando y disparando los más rápido que podamos. Estos misiles son de disparar y
olvidar, de este modo al encontrarnos en el hemisferio posterior la firma infrarroja producida
por los motores es máxima y por ello también la efectividad del disparo. Si todo ha salido
perfecto, que es bastante improbable, aunque nunca se sabe, habremos hecho una misión
totalmente “stealth” y podremos volver a casa como verdaderos fantasmas del aire.
TEORIARADAR
- 31 -
CONCLUSIONES
Como dijimos en la introducción es hora de deducir que familia es la que se incluye en los
aviones de Lomac, aquí viene la conclusión:
Podemos decir que el radar del SU-27 podría ser una versión del Myech mejorada hacia el
Zhuk-27, pero sin llegar a las capacidades de este último, careciendo además de sistema de
guiado de misiles activo de disparar y olvidar (R-77).
En el caso del MIG-29 ocurre lo mismo que para el SU-27 las capacidades son limitadas, los
rangos son parecidos ligeramente al caso del SU-27, pero se añade la capacidad de poder
disparar el R-77, disponible en el Zhuk y también en el Rubin mejorado.
Como conclusión podemos pensar que las versiones del Lomac son “híbridas” entre las dos
familias, de este modo conocer las características de todas las familias aquí explicadas nos
permitirá, finalmente, conocer las capacidades de nuestros aviones virtuales del mejor modo
posible.
ESA_BUZY
© ESA_BUZY PARA EL ESCUADRÓN CRUZ DE SAN ANDRÉS
TEORIARADAR
- 32 -