Presentación de PowerPoint
Anuncio

CENTRO NACIONAL DE INVESTIGACION
Y DESARROLLO TECNOLOGICO
cenidet
REDUCCION DE CORRIENTES ARMONICAS INYECTADAS A
LA LINEA POR CONVERTIDORES ESTATICOS DE POTENCIA
APLICANDO LA TECNICA DE CAPACITORES CONMUTADOS
T
E
S
I
S
PARA OBTENER
EL
GRADO DE
M A E S T R O EN
C I E N C I A S EN
I N G E N I E R I A
E L E C T R O N I C A
P
ING. H U G O
R
E
S
ABRAHAM
E
N
T
P A C H E CO
DIRECTOR DE TESIS: DR. JORGE HUGO CALLEJA
CUERNAVACA, MORELOS
A:
REYES
GJUMLICH
AGOSTO 2003
Indice
Pag.
Simbología y abreviaciones.
iii
Lista de tablas.
vi
Lista de figuras.
ix
Introducción.
1
1. Problemas generados por las corrientes armónicas.
1.1. Introducción.
1.1.1. Onda sinusoidal distorsionada.
1.2. Las corrientes armónicas ¿cómo y porqué se generan?.
1.3. Problemas generados por las armónicas.
3
3
3
4
5
2. Métodos para reducir las corrientes armónicas.
2.1. Introducción.
2.2. Métodos para reducir las corrientes armónicas.
2.2.1. Compensación por flujo magnético.
2.2.2. Técnica de transformador conmutado.
2.2.3. Multiplicación de fases.
2.2.4. Filtros pasivos paralelo.
2.2.5. Reinyección del rizo de cd.
2.2.6. Reducción de corrientes armónicas por la inyección de la tercera
armónica.
2.2.7. Filtros activos.
2.2.7.1. Introducción.
2.2.8. Técnica de capacitores conmutados.
2.3. Conclusiones.
8
8
12
12
14
15
17
18
20
3. Técnica de capacitores conmutados.
3.1. Introducción.
3.1.1. Principio de operación de la técnica de capacitores conmutados.
3.1.2. Circuito práctico.
3.2.Técnica de modulación.
3.3.Análisis de la técnica de capacitores conmutados.
27
27
27
28
29
34
4. Optimización del filtro de capacitores conmutados.
4.1. Introducción.
4.2. Método de optimización aplicando gradientes conjugados.
4.3. Análisis.
43
43
43
43
5. Pruebas y resultados.
56
21
21
24
26
i
5.1. Introducción.
5.2. Resultados obtenidos aplicando un patrón de conmutación PWM.
5.3. Resultados obtenidos aplicando un patrón de conmutación óptimo.
6. Conclusiones.
6.1. Introducción.
6.2. Resultados.
6.3.Comparación con otras técnicas.
6.4.Aplicaciones.
6.5.Trabajos futuros.
7. Bibliografía.
56
57
77
91
91
91
92
93
93
95
Apendices
A1. Listado del programa para obtener los ángulos αk mediante el método de
Newton Raphson y análisis del circuito de capacitores conmutados por PWM,
mediante el método de Rung G. Kutta.
97
A2. Listado del programa para optimizar los parámetros del circuito y el patrón de
conmutación utilizando el método de gradientes conjugados.
121
A3. Listado del programa en ensamblador del microcontrolador 8031 para generar el
patrón de conmutación PWM.
128
ii
Simbología y abreviaciones
A
A/s
Ac
Am
AMP
An
Ar
Bn
C
C1-C2
CA
CC
Ck
Cs
CD
eab
eac
eba
ebc
eca
ecb
F0-F1
FD
ω
Fs
GTO
h
I1
Ia
Iavo
Ih
IL
In
Io
IR
Is
Isc
j
J
KVA
k
k1-k4
L
Ampere.
Amper sobre segundo.
Amplitud de la onda triangular portadora para generar el patrón PWM.
Amplitud instantánea.
Amplificador.
Amplitud de la componente armónica par.
Amplitud de la onda seno de referencia para generar el patrón PWM.
Amplitud de la componente armónica impar.
Capacitor.
Capacitores.
Corriente alterna.
Capacitores conmutados.
Capacitor del filtro de CC.
Capacitancia asociada a la red eléctrica
Corriente directa.
Tensión de línea entre las fases A y B.
Tensión de línea entre las fases A y C.
Tensión de línea entre las fases B y A.
Tensión de línea entre las fases B y C.
Tensión de línea entre las fases C y A.
Tensión de línea entre las fases C y B.
Filtros pasivos sintonizados.
Factor de distorsión.
Frecuencia angular.
Frecuencia de conmutación.
Tiristor de apagado por compuerta.
Orden de la armónica.
Magnitud de la fundamental.
Corriente de entrada.
Corriente de salida promedio.
Magnitud de la armónica.
Corriente de línea.
Magnitud absoluta de la armónica
Corriente de salida.
Corriente al rectificador.
Corriente instantánea en una fase de la red eléctrica.
Corriente a través del filtro de capacitores conmutados.
Número entero (contador).
Función costo.
Kilovolt ampere.
Entero positivo.
Coeficientes del método de Run G. Kutta.
Inductancia
iii
Lo
Ls
M
Mm
MOSFET
n
N
Nn
PCC
PWM
q
q1-q4
R
RE
RL
S1-S2
SAI
SCC
T
T1-T2
Th1-Th4
TC
THD
V/s
V
VAR
Vc1
VC2
Vcp
Vi
VL
Vp
Vs
VS1
VS2
VS3
Vx
W
Xn
Yn
Z1-Z4
ZL
Zs
Inductancia de salida.
Inductancia asociada a la red eléctrica.
Indice de modulación.
Amplitud máxima de la onda sinusoidal.
Transistores de efecto de campo de óxido metálico.
Orden de la componente armónica.
Número de pulsos del patrón de conmutación por ciclo de línea.
Orden de la armónica.
Punto de acoplamiento común.
Modulación por ancho de pulso.
Número de pulsos del convertidor.
Coeficientes del método de Run G. Kutta.
Resistencia del filtro de capacitores conmutados
Resistencia interna de la fuente de suministro.
Resistencia de carga.
Interruptores.
Sistema de alimentación ininterrumpible.
Corriente de corto circuito.
Periodo de la tensión de entrada.
Transformadores monofásicos.
Tiristores.
Transformador de corriente.
Distorsión armónica total.
Volts sobre segundo.
Volts.
Volts amperes reactivos.
Tensión a través del capacitor C1 del filtro de capacitor conmutado.
Tensión a través del capacitor C2 del filtro de capacitor conmutado.
Tensión en las terminales del filtro activo de tensión.
Tensión de entrada.
Tensión en la bobina del filtro activo.
Tensión pico de fase.
Tensión de suministro.
Tensión de entrada de la fase 1.
Tensión de entrada de la fase 2.
Tensión de entrada de la fase 3.
Tensión a través de la rama en serie del capacitor y el interruptor del filtro de
capacitor conmutado.
Ancho del pulso.
Componente par de la armónica que se quiere filtrar.
Componente impar de la armónica que se quiere filtrar.
Impedancia de los filtros pasivos.
Impedancia de la carga.
Impedancia asociada a la red eléctrica.
iv
do
Dirección de pasos descendentes en el método de gradientes conjugados.
gk
Gradiente de la función costo evaluado en x = x k
g
Gradiente de la función costo J.
∆β
Incremento del escalar β.
g kT
Transpuesta del vector gradiente evaluado en x = x k
g0
Valor inicial del gradiente.
x0
∂
∂xi
Valor inicial en el método de gradientes conjugados.
Derivada parcial con respecto
a la variable xi en el método de gradientes
g k +1
conjugados.
Gradiente de la función costo evaluado en x = x k +1
d k +1
Nueva dirección de pasos descendentes.
g kT+1
Transpuesta del vector gradiente evaluado en x = x k +1
di dt
α
θ
∆
Υ
β
ω1-w6
αk
Variación de la corriente con respecto al tiempo.
Angulo de disparo del convertidor.
Angulo.
Conexión delta de un transformador trifásico.
Conexión estrella de un transformador trifásico.
Es un valor escalar muy pequeño aproximadamente de 1x10 −5
Ancho del pulso del patrón de conmutación.
Punto de intersección entre la onda triangular y la onda seno de referencia para
generar el patrón de conmutación PWM.
Incremento o paso en la integración.
Conexión estrella –delta.
Trifásico.
Mínimo valor de la función costo.
∆t
Υ/∆
3φ
Jmin
v
Lista de tablas
Pag.
Tabla 2.1
Tabla 2.2
Tabla 4.1
Tabla 5.1
Tabla 5.2
Tabla 5.3
Tabla 5.4
Tabla 5.5
Tabla 5.6
Tabla 5.7
Tabla 5.8
Tabla 5.9
Tabla 5.10
Tabla 5.11
Tabla 5.12
Tabla 5.13
Tabla 5.14
Base para los límites de corrientes armónicas.
Armónicas generadas por convertidores en función del número de
pulsos.
Ecuaciones de las componentes armónicas.
Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=0º.
Variación de las componentes armónicas en % aplicando la
técnica de CC para α=0º.
Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=5º.
Variación de las componentes armónicas en % aplicando la
técnica de CC para α=5º.
Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=10º.
Variación de las componentes armónicas en % aplicando la
técnica de CC para α=10º.
Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=15º.
Variación de las componentes armónicas en % aplicando la
técnica de CC para α=15º.
Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=20º.
Variación de las componentes armónicas en % aplicando la
técnica de CC para α=20º.
Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=25º.
Variación de las componentes armónicas en % aplicando la
técnica de CC para α=25º.
Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=30º.
Variación de las componentes armónicas en % aplicando la
técnica de CC para α=30º.
11
16
52
58
58
60
60
62
62
63
63
64
65
66
66
67
67
vi
Tabla 5.15 Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=35º.
Tabla 5.16 Variación de las componentes armónicas en % aplicando la
técnica de CC para α=35º.
Tabla 5.17 Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=40º.
Tabla 5.18 Variación de las componentes armónicas en % aplicando la
técnica de CC para α=40º.
Tabla 5.19 Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=45º.
Tabla 5.20 Variación de las componentes armónicas en % aplicando la
técnica de CC para α=45º.
Tabla 5.21 Comportamiento de los factores de distorsión, desplazamiento,
potencia y corriente eficaz de línea, aplicando y sin aplicar la
técnica de CC para α=50º.
Tabla 5.22 Variación de las componentes armónicas en % aplicando la
técnica de CC para α=50º.
Tabla 5.23 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α=0º.
Tabla 5.24 Patrón de conmutación obtenido para α=0º.
Tabla 5.25 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α=5º.
Tabla 5.26 Patrón de conmutación obtenido para α=5º.
Tabla 5.27 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α=10º.
Tabla 5.28 Patrón de conmutación obtenido para α=10º.
Tabla 5.29 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α=15º.
Tabla 5.30 Patrón de conmutación obtenido para α=15º.
Tabla 5.31 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α=20º.
Tabla 5.32 Patrón de conmutación obtenido para α=20º.
Tabla 5.33 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α=25º.
Tabla 5.34 Patrón de conmutación obtenido para α=25º.
Tabla 5.35 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α= 30º.
Tabla 5.36 Patrón de conmutación obtenido para α= 30º.
Tabla 5.37 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α= 35º.
Tabla 5.38 Patrón de conmutación obtenido para α= 35º.
68
69
70
70
71
71
72
72
78
78
79
79
80
80
81
81
82
82
83
83
84
84
85
85
vii
Tabla 5.39 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α= 40º.
Tabla 5.40 Patrón de conmutación obtenido para α= 40º.
Tabla 5.41 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α= 45º.
Tabla 5.42 Patrón de conmutación obtenido para α= 45º.
Tabla 5.43 Magnitud de las armónicas que se desean eliminar y que se
introducen al programa para α= 50º.
Tabla 5.44 Patrón de conmutación obtenido para α= 50º.
Tabla 5.45 Comparación de las formas de onda de la corriente de línea
compensada obtenidas mediante las dos estrategias; primeramente
aplicando un patrón de conmutación PWM y posteriormente
aplicando un patrón de conmutación óptimo.
Tabla 6.1. Comparación de tres técnicas para la compensación de corrientes
armónicas.
86
86
87
87
88
88
89
93
viii
Lista de figuras.
Pag.
Figura 1.1
Figura 1.2
Figura 1.3
Figura 2.1
Figura 2.2
Figura 2.3
Figura 2.4
Figura 2.5
Figura 2.6
Figura 2.7
Figura 2.8
Figura 2.9
Figura 2.10
Figura 2.11
Figura 2.12
Figura 2.13
Figura 2.14
Figura 2.15
Figura 2.16
Figura 2.17
Figura 2.18
Figura 3.1
Figura 3.2
Figura 3.3
Figura 3.4
Onda sinusoidal. Am=Mm senθ, donde A es la amplitud instantánea y
es la amplitud pico a 90° y 270º.
Distorsión armónica debido al cambio de fase.
Formas de ondas de los voltajes y corriente de entrada para un
convertidor controlado 3φ de 6 pulsos.
Convertidor 3φ controlado.
Formas de ondas de los voltajes y corriente de entrada para un
convertidor controlado 3φ de 6 pulsos.
(a) Configuración general de un sistema de CD. (b) Forma de onda
de la corriente en el devanado secundario del transformador.
Transformador de corriente con tres devanados para la detección de
las componentes armónicas y la eliminación de la componente
fundamental.
Configuración
para la técnica de compensación por flujo
magnético.
Circuito equivalente para el análisis de la técnica de transformador
conmutado.
Modos de operación de la corriente de suministro.
Configuración de un convertidor de 12 pulsos.
Sistema típico con filtros sintonizados.
Puente rectificador con reinyección de rizo de CD. T1 y T2
transformadores para alimentar al rectificador de retroalimentación.
C = Capacitor de bloqueo. D1 = rectificador de retroalimentación.
Corriente inductiva de CD de la carga.
Circuito básico para la inyección de armónicas.
Formas de onda de corriente. (a) Devanado de CD, (b) Corriente
inyectada (tercera armónica), (c) Corriente de línea en el devanado
primario.
Circuito equivalente del filtro activo de tensión.
Circuito equivalente del filtro activo de corriente.
Circuito equivalente del filtro activo universal.
(a) Filtro de capacitor conmutado, (b) Patrón de conmutación, (c)
Circuito simplificado del filtro con capacitor conmutado.
Circuito de capacitores conmutados.
(a) Filtro de capacitor conmutado, b) Patrón de conmutación.
(a) Flujo de corriente a través de C1 b) Flujo de corriente a través
de C2.
Filtro de capacitor conmutado con inductor limitador de corriente.
a) Filtro con capacitor conmutado con una tercera rama, b) Patrón
de conmutación.
3
4
5
9
10
12
13
13
14
14
16
17
18
19
20
20
22
23
23
25
25
27
28
28
29
ix
Figura 3.5
Figura 3.6
Figura 3.7
Figura 3.8
Figura 3.9
Figura 3.10
Figura 3.11
Figura 3.12
Figura 3.13
Figura 4.1
Figura 4.2
Figura 4.3
Figura 4.4
Figura 4.5
Figura 4.6
Figura 5.1
Figura 5.2
Figura 5.3
Figura 5.4
Figura 5.5
Figura 5.6
Figura 5.7
Figura 5.8
Figura 5.9
Figura 5.10
Generación de la función PWM.
Anchos de pulsos de la función PWM.
Diagrama de flujo para obtener los valores de αk.
Patrones de conmutación para cada uno de los capacitores.
Patrón Típico de conmutación.
Circuito de capacitores conmutados.
Diagrama de flujo para el cálculo de Isc, Vx e IL.
Diagrama de flujo para la subrutina del método de Rung G. Kutta.
Resultados de la simulación. a) Corriente de entrada no compensada.
b) Corriente del filtro c) Corriente de entrada compensada d) Patrón
de conmutación (para S1).
Circuito simplificado del filtro con capacitor conmutado.
Forma de onda de la corriente a través del filtro.
Patrón de conmutación para S1.
Diagrama de flujo para evaluar el valor de los capacitores y el
patrón de conmutación utilizando el método de gradientes
conjugados.
Diagrama de flujo para obtener el patrón de conmutación y el valor
de los capacitores.
Resultados experimentales con C1 = 18 µF y C2 = 10 µF (a)
Corriente de entrada no compensada (b) Espectro de la corriente de
entrada sin compensación (c) Corriente de entrada compensada. (d)
Espectro de la corriente compensada.
Circuito de control para los capacitores conmutados.
Resultados de la simulación para α =0°: a) Espectro de la corriente
de línea compensada. b) De arriba a bajo: Corriente de entrada no
compensada Ir, Corriente a través del filtro Isc, Corriente de línea
compensada IL y patrón de conmutación PWM.
Resultados experimentales para α=0°: a) Espectro de la corriente de
línea compensada, b) Corriente de entrada compensada.
Resultados de la simulación para α =5°: a) Espectro de la corriente
de línea compensada. b) De arriba a bajo: Corriente de entrada no
compensada Ir, Corriente a través del filtro Isc, Corriente de línea
compensada IL y patrón de conmutación PWM.
Resultados experimentales para α=5°: a) Espectro de la corriente de
línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=10°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=15°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=20°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=25°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=30°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
29
31
33
35
36
39
40
41
42
44
45
46
50
53
55
57
59
59
61
61
63
64
65
67
68
x
Figura 5.11
Figura 5.12
Figura 5.13
Figura 5.14
Figura 5.15
Figura 5.16
Figura 5.17
Figura 5.18
Figura 5.19
Figura 5.20
Figura 5.21
Figura 5.22
Figura 5.23
Figura 5.24
Figura 5.25
Figura 5.26
Figura 5.27
Figura 5.28
Resultados experimentales para α=35°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=40°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=45°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Resultados experimentales para α=50°: a) Espectro de la corriente
de línea compensada, b) Corriente de entrada compensada.
Comportamiento del convertidor sin aplicar la técnica de capacitores
conmutados.
Comportamiento del factor de distorsión del convertidor aplicando
CC (FDisc) y sin aplicar la técnica (FDiss).
Comportamiento del factor de desplazamiento del convertidor
aplicando CC (FDezc) y sin aplicar la técnica (FDezs).
Comportamiento del factor de potencia del convertidor, aplicando
CC (FPc) y sin aplicar la técnica (FPs).
Resultados experimentales para α=0º: a) Espectro de la corriente de
línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=5º: a) Espectro de la corriente de
línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α= 10º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=15º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=20º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=25º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=30º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=35º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=40º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Resultados experimentales para α=45º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
69
70
72
73
74
75
75
76
78
79
80
81
82
83
84
85
86
87
xi
Figura 5.29
Figura 6.1
Resultados experimentales para α=50º: a) Espectro de la corriente
de línea compensada, b) Forma de onda de la Corriente de línea
compensada.
Diagrama a bloques para el sistema propuesto.
88
94
xii
Introducción.
El objetivo de este trabajo de investigación fue la aplicación de la técnica de capacitores
conmutados para reducir las corrientes armónicas inyectadas a la línea por convertidores
trifásicos controlados.
En años pasados esta misma técnica se utilizó para reducir corrientes armónicas
inyectadas a la línea por convertidores no controlados y también fue exitosamente utilizada
para generar corriente reactiva basada en configuración de circuitos trifásicos.
En este trabajo de investigación se aplican dos diferentes estrategias de la técnica de
capacitores conmutados. En la primera, la conmutación de los capacitores sigue un patrón
PWM. Los valores de los parámetros del circuito y el patrón de conmutación son
seleccionados arbitrariamente; las corrientes armónicas son evaluadas utilizando procesos
iterativos utilizando el método de Rung G. Kutta de cuarto orden, de esta forma se obtienen
los mejores valores de los parámetros del circuito y el patrón de conmutación teniendo como
referencia el factor de distorsión.
En la segunda estrategia se realiza el análisis de Fourier de un ciclo de la corriente de los
capacitores y se forma un sistema de ecuaciones no lineales, la magnitud y el orden de las
armónicas a eliminar son introducidas en este sistema de ecuaciones y todo el sistema es
minimizado utilizando el método de gradientes conjugados para obtener los intervalos de
conmutación óptimos.
El trabajo quedó dividido en seis capítulos de la siguiente manera:
En el capítulo 1, se discute la naturaleza de las corrientes armónicas, ¿cómo y por qué
son generadas? y los problemas que se generan cuando éstas están presentes en la línea
de suministro.
Posteriormente en el capítulo 2, se presentan diferentes métodos para la reducción de
estas corrientes analizándose las ventajas y desventajas de cada uno de ellos.
En el capítulo 3, se presenta el análisis de la técnica propuesta en este trabajo de
investigación que es la técnica de capacitores conmutados.
Posteriormente en el capítulo 4, se presenta la optimización del filtro de capacitores
conmutados mediante el método de gradientes conjugados.
En el capítulo 5, se muestran los resultados de simulación y experimentales obtenidos
con el prototipo de laboratorio implementado (filtro de capacitores conmutados). En este
capítulo se presentan los resultados de las dos estrategias.
1
Finalmente en el capítulo 6, se presentan las conclusiones obtenidas en el desarrollo de
este trabajo, así como las posibles aplicaciones de esta técnica y se hace referencia a
posibles trabajos futuros en esta línea de investigación.
2
Capítulo
1
Problemas generados por las corrientes armónicas
1.1
Introducción.
Antes de discutir la distorsión armónica de la corriente eléctrica, es importante entender la
naturaleza de una onda pura y limpia. Pura significa que la forma de onda se dibuja sobre una
amplitud y tiempo uniforme (Figura 1.1).
Peridodo (sec)
90°
1 Revolución
Mm
θ
180°
0°
360°
0°
90°
180°
360°
tiempo
270°
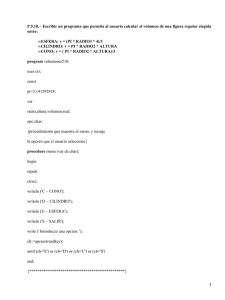
Figura 1.1 Onda sinusoidal. Am = M m senθ , donde A es la amplitud instantánea y es
la amplitud pico a 90° y 270°
Una onda sinusoidal se dibuja sobre el tiempo como el seno del ángulo θ de un vector Mm
rotando a una velocidad uniforme, a través de una revolución completa. La amplitud
instantánea se describe por Am = M m senθ . Esta onda solo contiene una componente en
frecuencia, cuyo periodo es el tiempo de una rotación y cuya amplitud máxima es Mm. El
máximo positivo ocurre cuando θ es 90°, el máximo negativo ocurre cuando θ es 270°. La
amplitud es cero cuando θ es 0º ó 180°. Esta forma de onda se muestra en la figura 1.1 para un
solo ciclo de línea.
1.1.1
Onda seno distorsionada.
No todas las formas de onda son sinusoidales. En realidad ninguna forma de onda real de
corriente o de voltaje son ondas totalmente sinusoidales puras. Estas están siempre
distorsionadas en algún modo. Esta desviación de una onda puramente sinusoidal es
equivalente a adicionar una o más ondas sinusoidales puras de diferentes frecuencias. De
acuerdo a Fourier se sabe que cualquier forma de onda periódica puede ser producida por
medio de la adición de otras formas de onda de amplitudes y frecuencias diferentes.
3
La distorsión causada por la adición de armónicas a la componente fundamental es
función no solamente de su frecuencia, sino también por su amplitud y la fase con respecto a
la fundamental como se muestra en figura 1.2.
Mm
Mm
Componente
fundamental de la onda
sinusoidal pura
+
1/3M m
Tercera armónica
-1/3M m
2/3M m
=
1 1/3M m
Armónica
senoidal
Distorsionada
Figura 1.2 Distorsión armónica debido al cambio de fase.
1.2
Las corrientes armónicas ¿cómo y porqué se generan?
Los convertidores estáticos de potencia (rectificadores / inversores) pueden considerarse
como fuentes generadoras de corrientes armónicas en los sistemas de suministro de CA [1]. La
corriente de CD es conmutada imponiendo una forma de onda cuadrada a la corriente de
entrada (figura 1.3) para cada fase secuencialmente. El análisis de Fourier de la forma de onda
de la corriente de línea da la magnitud y frecuencia de las corrientes armónicas.
4
Vi
e ab e ac eba ebc ec a ec b e ab
Iavo Ia
ωt
α =0
ωt
Ia
α = 30
α
ωt
Ia
α = 60
α
ωt
Figura 1.3: Formas de ondas de los voltajes y corriente de
entrada para un convertidor controlado 3φ de 6 pulsos.
En un convertidor de 6 pulsos el orden de las armónicas es:
h = kq ± 1
(1.1)
donde:
h = orden de la armónica.
k = es un entero (1, 2, 3,..)
q = número de pulsos del convertidor estático de potencia.
La amplitud teórica de las armónicas es:
Ih =
I1
h
(1.2)
donde:
Ih = es la magnitud de la corriente armónica.
I1 = magnitud de la corriente fundamental.
1.3.
Problemas generados por las armónicas:
El grado en el cual las armónicas pueden ser toleradas, depende de la susceptibilidad de
la carga [2]. El tipo de equipo menos susceptible es aquel cuya función principal es el de
producir calor, como en el caso de los hornos eléctricos. En este caso la energía de las
corrientes armónicas es aprovechada y es completamente tolerada. El tipo de equipo más
susceptible es aquel que está diseñado para tener una onda de entrada de voltaje
perfectamente sinusoidal. Dentro de esta categoría se encuentran los equipos de
5
comunicaciones y procesamiento de datos y un tipo de carga que normalmente está entre los
dos equipos antes mencionados, son los motores.
A continuación se listan algunos de los problemas causados por las armónicas.
1. Uno de los principales problemas causados por las corrientes armónicas es la
interferencia con los circuitos de comunicaciones. La inductancia de acoplamiento de la
línea de transmisión y los circuitos telefónicos, inducen voltajes en los sistemas
telefónicos causando niveles de ruido que pueden hacer imposible entender los mensajes.
2. Las corrientes armónicas pueden causar calentamiento en máquinas rotatorias [3]. Las
corrientes armónicas de orden kq + 1 son corrientes de fase positiva y las corrientes de
orden de kq − 1 son corrientes de fase negativa. En máquinas síncronas, esas dos
corrientes se suman directamente causando un calentamiento adicional en el rotor.
3. El ruido causado por la generación de las corrientes armónicas
operación errónea en los sistemas de regulación y control [4].
puede causar una
4. Los sistemas de instrumentación y medición se ven afectados por esas corrientes
armónicas, particularmente si se dan las condiciones de resonancia, lo cual causa
sobrevoltajes de esos circuitos.
5. En cargas críticas, las pulsaciones de par causadas por las corrientes armónicas en motores
de CA pueden ser perjudiciales para los procesos. Ellas también pueden provocar
condiciones de resonancia si la frecuencia natural del sistema mecánico es excitado por las
armónicas.
6. Los balastros de lámparas fluorescentes y de arco de mercurio algunas veces tienen
capacitores los cuales, con la inductancia del balastro y la del circuito, tienen un punto de
resonancia. Si este punto corresponde a una de las frecuencias de las armónicas generadas,
se puede producir un calentamiento del balastro y fallar en todo caso.
7. Los capacitores para la corrección del factor de potencia junto con la impedancia de línea
pueden causar resonancia paralela a las frecuencias armónicas causando peligrosos sobre
voltajes.
8. Los mandos de velocidad variable controlados por tiristores pueden ser afectados por los
armónicos. Los voltajes armónicos pueden causar el encendido de los circuitos de
compuerta en instantes que no corresponden a los requeridos.
9. En los sistemas de suministro que alimentan cargas domésticas, la interferencia con las
señales de video por corrientes armónicas generadas por convertidores es usualmente la
primera indicación de problemas armónicos.
6
10. Los equipos de medición, tales como los watthorímetros y relevadores de sobrecorriente
normalmente responden a la fundamental; al existir desbalance en las fases causado por
distorsión armónica se produce la operación errónea de estos dispositivos.
7
Capítulo
2
Métodos para reducir las corrientes armónicas
2.1
Introducción
Hasta hace algunos años la energía eléctrica en gran medida fue tomada con mucha
indiferencia por los consumidores domésticos e industriales. Esta ha sido entregada por las
compañías de suministro y usada para hacer funcionar aplicaciones de maquinaria pesada en
las industrias, las cuales generalmente fueron inmunes a la calidad de la energía eléctrica.
Cuando las formas onda de voltajes y corrientes fueron observadas, se dieron cuenta que éstas
no eran puramente sinusoidales debido a la presencia de armónicos, la principal preocupación
fue con los efectos de esta distorsión sobre los motores de inducción y la interferencia en las
líneas telefónicas. Más importantes en esos tiempos fueron las fluctuaciones en los niveles de
voltaje tales como las sobretensiones.
Hoy en día la revolución electrónica ha cambiado todo eso. Las variaciones de voltaje son
todavía de gran interés, pero la libertad de la distorsión armónica viene a ser otra preocupación
para muchos usuarios comerciales de potencia. Por un lado, el equipo comúnmente usado en
la industria, tales como las computadoras y los controles electrónicos, son menos tolerantes a
la distorsión de la corriente de la línea. Por otro lado, el equipo industrial es más propenso a
generar distorsión armónica. Ejemplos típicos de esas fuentes generadoras de armónicas son
las cargas no lineales, tales como los controles de motores de estado sólido y convertidores
estáticos de potencia.
La aparición del tiristor ha hecho posible el diseño de convertidores estáticos de potencia
con semiconductores de alta eficiencia y bajo costo, lo cual ha incrementado el uso de estos
dispositivos en toda la industria, elevando considerablemente el nivel de corrientes armónicas
inyectadas en los sistemas de suministro. La no linealidad de estos dispositivos da como
resultado la modificación de la forma de onda de la corriente de la fuente de suministro,
haciéndola no sinusoidal y ocasionando un gran contenido armónico de esta corriente.
En la actualidad, la generación de las corrientes armónicas y su subsecuente propagación
dentro de los sistemas de suministro de energía es un tema de gran interés que concierne a las
autoridades de suministro de energía; diversas causas contribuyen a la magnitud del
problema:
Las corrientes armónicas generadas por este tipo de cargas no lineales no son detectadas
por los Watthorímetros convencionales de disco. Normalmente estos dispositivos detectan
solamente la componente fundamental de la corriente dando como resultado mediciones
erróneas de la energía suministrada y, en definitiva pérdidas en el sistema. Este es uno de los
principales problemas que se tiene hoy en día, ya que de cierta forma la energía suministrada
8
no se aprovecha en su totalidad por los usuarios y la energía medida por las compañías de
suministro no es representativa de lo que en realidad proporcionan.
Además, los efectos de las armónicas en los transformadores son varios; las corrientes
armónicas causan un incremento de las pérdidas en el cobre, pérdidas en el flujo magnético.
Los voltajes armónicos causan un incremento de las pérdidas en el hierro, además de
incrementar el ruido audible.
En los equipos electrónicos de control, a menudo depende su precisión del cruce por cero
de la forma de onda de voltaje o de otros aspectos de esta forma de onda. Por tanto, teniéndose
en el sistema una distorsión armónica puede resultar un cambio del cruce por cero del voltaje
o del punto al cual un voltaje de fase viene a ser mayor que otro voltaje de fase. Estos
cambios en esos dos puntos críticos, pueden causar una mala operación del equipo.
La restricción del factor de potencia de la carga impuesto por las autoridades de
suministro de energía eléctrica da lugar a grandes multas, teniendo los usuarios que instalar
capacitores para la corrección del factor de potencia. Esto ocasiona serios problemas:
sobretensiones en la línea producidas por la resonancia en paralelo de la impedancia del
sistema con los capacitores utilizados para la corrección del factor de potencia a las
frecuencias armónicas.
Lo
Vs1
IL
Vs2
Io
RL
Vs3
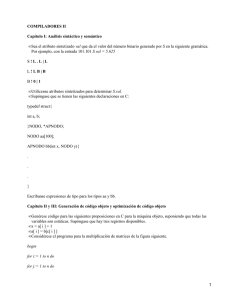
Figura 2.1 Convertidor 3φ controlado.
Actualmente, la generación e inyección de armónicos al sistema de suministro, se debe
en gran parte al uso de cargas no lineales como es el caso de los convertidores con
semiconductores. La figura 2.1 muestra un convertidor trifásico controlado con carga
altamente inductiva y en la figura 2.2, se muestran las diferentes formas de onda de los
voltajes y corrientes de entrada para distintos ángulos de disparo de los tiristores. Como se
observa en la figura 2.2, la corriente de entrada tiene una forma de onda cuadrada lo cual
indica que se tienen presentes armónicas de bajo orden las cuales fluyen en la línea.
9
Vi
e ab e ac eba ebc ec a ec b e
ab
Iavo Ia
ωt
α =0
ωt
Ia
α = 30
α
ωt
Ia
α = 60
α
ωt
Figura 2.2: Formas de ondas de los voltajes y corriente de
entrada para un convertidor controlado 3φ de 6 pulsos.
Los convertidores estáticos de potencia conmutados por línea tienen características que
causan problemas en los sistemas[4]:
Generan armónicas las cuales producen distorsión y causan interferencia con otros
equipos.
Desfasan la corriente del voltaje consumiendo potencia reactiva.
Las fluctuaciones de la potencia reactiva pueden causar parpadeos de voltajes de magnitud
variable en otros usuarios.
Los convertidores producen corrientes armónicas bajo condiciones normales de operación
como sigue:
Con voltajes de suministro iguales en magnitud y espaciados 120°.
Con circuitos rectificadores con elementos de compuerta exactamente divididos los 360°
entre q grados.
Teniendo en cuenta todos los problemas que ocasionan las corrientes armónicas en los
sistemas de distribución, en los equipos de medición y control, a las compañías de suministro
y a los usuarios, es necesario reducirlas a niveles aceptables, de manera que se puedan
controlar los problemas antes mencionados. La norma IEEE Std 519 92 recomienda los
límites de corrientes armónicas para diferentes tipos de consumidores. El tipo o el tamaño del
consumidor se calcula con base a una relación entre la corriente de corto circuito (SCC) del
sistema, medida en el punto de acoplamiento común (PCC) del consumidor, con la máxima
corriente de la carga del consumidor. Los límites individuales de las corrientes armónicas se
10
expresan en porcentaje de la máxima corriente de la carga. La tabla 2.1 muestra los límites de
corrientes armónicas recomendados por esta norma.
Tabla 2.1: Base para los límites de corrientes armónicas.
Corriente de corto
circuito (SCC) al
punto común de
acoplo (PCC)
10
20
Máximo % de
armónicas a la
frecuencia individual
2.5 - 3.0 %
2.0 - 2.5 %
50
1.0 - 1.5 %
100
1000
0.5 - 1.0 %
0.05 - 0.10 %
Tipo de consumidor
Sistemas específicos
1 - 2 Grandes consumidores
Unos pocos relativamente grandes
consumidores
5 - 20 Consumidores medianos
Muchos pequeños consumidores
El objetivo de limitar las corrientes armónicas es el de limitar la amplitud máxima de un
armónico individual de tensión a un 3% de la componente fundamental y la Distorsión
armónica total (THD) a un 5%.
De lo anterior podemos concluir que si queremos optimizar el ahorro de energía y
controlar los problemas ocasionados por las corrientes armónicas, es necesario mantenerlas
dentro de límites preestablecidos.
11
2.2.
Métodos para reducir las corrientes armónicas:
En esta sección se listan y analizan diferentes técnicas existentes para la reducción de las
corrientes armónicas generadas por los convertidores estáticos de potencia CA/CD. Se
comparan las diferentes ventajas y desventajas que cada método presenta.
2.2.1
Compensación por flujo magnético [5].
En la figura 2.3a se muestra un sistema convencional de CD. En el devanado secundario
del transformador la corriente fluye a través del circuito rectificador y la reactancia de
conmutación existente, como se muestra en la figura 2.3b. Esta corriente induce un flujo
magnético con una forma de onda similar en el núcleo del transformador, y de esta manera
las corrientes armónicas de CA por medio del flujo magnético fluyen dentro del sistema de
CA.
Convertidor
Sistema de CA
Is
Sistema de CD
Transformador
F0
F1
F0 , F 1 = Filtros sintonizados
a)
Is
b)
ωt
Figura 2.3: (a) Configuración general de un sistema de CD. (b)
Forma de onda de la corriente en el devanado secundario del
transformador.
La reducción de corrientes armónicas por medio de la compensación del flujo magnético
se basa en lo siguiente:
Las corrientes armónicas generadas por la carga no lineal se detectan por medio de un
transformador de corriente (TC).
Un circuito resonante serie se conecta al secundario del transformador para remover la
componente fundamental de la señal detectada y el devanado terciario del TC detecta las
armónicas.
Después de filtrar la componente fundamental, la señal detectada se amplifica para inducir
el mismo número de amper/vuelta que se produce por el devanado secundario.
12
La corriente de salida del amplificador se hace fluir en el devanado terciario del
transformador de potencia en modo diferencial contra la corriente del devanado
secundario, de esta manera se cancelan las componentes armónicas.
I2
Circuito
Terciario
Circuito
Secundario
If
Ih
es
Ls
Al amplificador
Cs
If: Componente fundamental
Ih: Componentes armónicas
Figura 2.4: Transformador de corriente con tres devanados
para la detección de las componentes armónicas y la
eliminación de la componente fundamental.
El arreglo para esta técnica se muestra en la figura 2.5.
Sistema CD
Transformador
Detección
Sistema CA
Carga
no
Lineal
Armónica
AMP
Filtro para la
Fundamental
Figura 2.5: Configuración para la técnica de compensación por
flujo magnético.
Ventajas:
Una de las ventajas de este método es la eliminación de armónicas no características tales
como la 3a y la 9ª.
La componente fundamental en el secundario del transformador puede ser removida sin
ningún cambio significativo en las componentes armónicas por medio de un
transformador de corriente de 3 devanados.
13
Desventajas:
Se necesita un transformador adicional.
Es necesario un amplificador de alta potencia para la cancelación de armónicas de bajo
orden.
2.2.2. Técnica de transformador conmutado [6].
En esta técnica las corrientes armónicas generadas por los convertidores pueden reducirse
significativamente añadiendo un arreglo de transformador en las terminales del convertidor,
como se muestra en la figura 2.6. Existen dos modos de operación para este circuito:
Modo I.- Los tiristores S1 y S2 se disparan simultáneamente con los tiristores Th1-Th3 y
Th2-Th4 respectivamente.
La
Ip
L1
is
io
L2
Th1
Th4
Va1
CARGA
S1
S2
Th2
Th3
Figura 2.6: Circuito equivalente para el análisis de la técnica de
transformador conmutado.
Modo II.- Los tiristores S2 y S1 se disparan antes de que los tiristores Th1-Th3 y Th2-Th4
sean disparados, respectivamente. El modo I solo altera la pendiente de subida de la forma de
onda de corriente, Figura 2.7a, mientras que el modo II altera la pendiente de subida y bajada
de la forma de onda de corriente, figura 2.7b.
Io
Io
Ia
Ia
t
-Io
Io
t
-Io
Io
Ia
Ia
t
-Io
a) Modo 1
t
-Io
b) Modo 2
Figura 2.7: Modos de operación de la corriente de
suministro
14
Ventajas:
Mejora la forma de onda de la corriente de línea, mejorando el factor de distorsión,
eliminando las armónicas de bajo orden.
Desventajas:
Este método necesita tres devanados adicionales para formar el transformador conmutado.
Necesita 2 tiristores adicionales.
Control de conmutación complicado.
2.2.3.- Multiplicación de fases [4].
Teóricamente, en los equipos convertidores se pueden emplear la multiplicación de fases
para cancelar diferentes componentes armónicas. De acuerdo a la ecuación (2.1) el orden de la
corriente armónica generada por un convertidor decrece con el incremento del número de
pulsos q.
h = kq ± 1
(2.1)
donde:
k = número entero (1, 2,3, ..)
q = número de pulsos del convertidor.
La amplitud teórica de las armónicas es:
Ih =
I1
h
(2.2)
donde:
Ih = magnitud de la corriente armónica.
I1 = magnitud de la corriente fundamental.
El convertidor que más se utiliza en la industria, es el puente rectificador de 6 pulsos. Un
rectificador de 12 pulsos se construye utilizando dos circuitos rectificadores de 6 pulsos, los
cuales se alimentan de dos juegos de transformadores trifásicos en paralelo con sus voltajes de
línea iguales y desfasados 30°. La figura 2.8 muestra el arreglo de este convertidor de 12
pulsos.
15
De acuerdo a la ecuación (2.1) un convertidor de 12 pulsos generará solamente la mitad
de las componentes armónicas generadas por uno de 6 pulsos.
Puentes de 6 pulsos
L
1
3 Fases
Carga
Transformadores
2
Figura 2.8: Configuración de un convertidor de 12 pulsos.
La tabla 2.2 muestra las magnitudes de las componentes armónicas presentes en
diferentes convertidores:
Ventajas:
Al aumentar el número de fases las armónicas presentes son menores a las que se obtiene
con la configuración de un convertidor de 6 pulsos.
Desventajas:
Se requiere el uso de dos puentes rectificadores de 6 pulsos y además se necesitan dos
transformadores trifásicos para alimentar al sistema.
Aumento en el costo del sistema.
Tabla 2.2 Armónicas generadas por convertidores en función del número de pulsos
Número de
pulsos
6
12
18
24
5
17.5
0
0
0
Orden de
7
11
11
4.5
0
4.5
0
0
0
0
las armónicas%
13
17
19
23
2.9
1.5
1.0
0.9
2.9
0
0
0.9
0
1.5
1.0
0
0
0
0
0.9
25
0.8
0.8
0
0.8
16
2.2.4
Filtros pasivos paralelos:
Las corrientes armónicas pueden cancelarse mediante el uso de un número de filtros
resonantes en derivación, sintonizados a las frecuencias de las armónicas que se quieran
eliminar.
La figura 2.9 representa un arreglo sencillo de filtros pasivos en paralelo para un
convertidor de 6 pulsos. Cada uno de los filtros se sintoniza para diferentes armónicas de tal
manera que un gran porcentaje de la corriente armónica correspondiente pase a través del
filtro, y se reducen las armónicas presentes en el sistema.
ZL
IL
Ir
I5
I7
Z1
Vm
I11
Z2
I13
Z3
Z4
Im
M
5a
7a
11 a
13 a
Motor de
CD
Figura 2.9: Sistema típico con filtros sintonizados.
En los convertidores de 6 pulsos que más se utilizan para propósitos industriales y en los
de doce pulsos que se emplean en las líneas de transmisión, se colocan filtros en derivación
para la 5a, 7a, 11a, y 13a armónicas. Se puede incluir un filtro pasa altas para las armónicas
de orden más elevado. Los filtros deben tener suficiente capacidad para que las armónicas que
provienen del sistema de potencia no estén en posibilidad de sobrecargarlo. A veces puede ser
necesario no sintonizar el filtro a la frecuencia de la armónica exacta, sino a un punto
cercano.
El punto de sintonía puede derivar si cambian las condiciones ambientales, pero las
investigaciones experimentales indican que tal deriva no tienen un efecto apreciable sobre la
eficiencia del filtro.
El objetivo principal de los filtros es el de reducir no solamente las corrientes y voltajes
armónicos en un sistema de alimentación a niveles aceptables, sino también proveer parte de
la potencia reactiva consumida por los convertidores y la restante es suministrada por los
capacitores para el mejoramiento del factor de potencia.
17
Ventajas:
Las principales razones para justificar el uso de los filtros pasivos son:
Reducción de la demanda de potencia reactiva (VAR's), evitando las multas impuestas por
los distribuidores de energía eléctrica por trabajar a factores de potencia por debajo de lo
establecido.
Reducción de las pérdidas del sistema.
Mejoramiento de la forma de onda de voltaje del sistema.
Reducción de corrientes armónicas
Desventajas:
Aunque los filtros paralelos pueden reducir corrientes armónicas apreciables y suministrar
potencia reactiva para el mejoramiento del factor de potencia, también pueden producir
condiciones indeseables de resonancia.
2.2.5.- Reinyección del rizo de CD [7].
Con esta técnica, un sistema convertidor de 6 pulsos puede operar como un sistema de 12
pulsos desde el punto de vista de CA. Para explicar su principio de funcionamiento nos
auxiliaremos de la figura 2.10, la cual se muestra a continuación.
L
T1
N
RL
N
T2
C
+0
D1
-0
Figura 2.10: Puente rectificador con re inyección de rizo de CD.
T1 y T2_transformadores para alimentar al rectificador de
retroalimentación. C = capacitor de bloqueo. D1 = rectificador
de retroalimentación.
Los devanados primarios de los transformadores monofásicos T1 y T2 se conectan al
voltaje de rizo común de CD. Esos transformadores, con secundarios conectados
inversamente, proveen el voltaje de conmutación para un rectificador monofásico de onda
18
completa (convertidor de retroalimentación). La salida del convertidor monofásico se conecta
en serie con la salida de CD del convertidor principal de 6 pulsos. Si el tiristor del convertidor
de retroalimentación se enciende 30° después del correspondiente encendido de los tiristores
del convertidor principal, se obtiene una nueva forma de onda para la corriente de CD de la
carga (fig 2.11) en la cual las armónicas del orden de 6n + 1 (con n = 1, 3, 5, ..) son cero,
mientras que las otras componentes armónicas (n = 2, 4, 6, ..) mantienen la misma relación
con respecto a la fundamental como antes.
A
t
C
D
E
B
t
t
Figura 2.11: Corriente inductiva de CD de la carga.
A = Corriente inyectada a una frecuencia 3 veces mayor que la
fundamental
B = Corriente del rectificador antes de la modificación.
C = Corriente de fase modificada.
D = Fase dos desplazada 120°.
E = Corriente de fase resultante en la delta del primario.
Ventajas:
Con esta técnica, es posible eliminar las armónicas impares en un intervalo.
Esta técnica es aplicable a convertidores con carga puramente resistiva o con carga
altamente inductiva.
El principio es aplicable a ambos modos de operación; rectificadores e inversores, así
como a suministros de frecuencia variable.
Desventajas:
Este método necesita dos transformadores monofásicos adicionales.
Es necesario un convertidor monofásico de retroalimentación de onda completa.
19
2.2.6.- Reducción de corrientes armónicas por la inyección de la tercera armónica [8].
Esta técnica se basa en la inyección de la tercera armónica en el núcleo del devanado
secundario del transformador. Una corriente a 3 veces la frecuencia de la línea se aplica al
punto central de la estrella del devanado secundario conectado al rectificador trifásico (figura
2.12). Suponiendo que la corriente de CD es plana la corriente armónica inyectada será
superpuesta sobre bloques rectangulares de la corriente del devanado secundario.
Cs
IR2
IR1
R2
R
I S2
S
T
M
S2
T2
IS 1
Uf
IT2
IT1
Cs
Figura 2.12: Circuito básico para la inyección de armónicas.
Inyectando una tercera armónica en el transformador, se crea una tercera componente en
el devanado de CD, iR2 (t). La corriente en el secundario se reflejará a través del lado
primario del transformador. De esta manera, la corriente en el secundario es discontinua. Uno
esperaría una corriente similar en el lado de CA, sin embargo, aplicando las leyes de
Kirchhoff al nodo del devanado primario, se observa que la corriente del lado de CA es
continua. En la práctica, esto significa que la tercera componente se elimina. La figura
2.13(c) muestra la forma de onda de la corriente del lado de CA, después de haber inyectado
la tercera corriente armónica.
ωt
a)
ωt
b)
ωt
c)
Figura 2.13: Formas de onda de corriente. (a) Devanado de CD,
(b) Corriente inyectada (tercera armónica), (c) Corriente de línea
en el devanado primario
20
Ventajas:
Este esquema provee una solución barata para mejorar el factor de distorsión de la
corriente de línea.
Desventajas:
Este método es aplicable a convertidores con una carga específica.
2.2.7
Filtros activos [9].
2.2.7.1 Introducción
Los filtros activos son convertidores basados en semiconductores y su objetivo principal
es cancelar la presencia de armónicos de tensión y/o de corriente; sin embargo, también
pueden realizar otras funciones como es compensar factor de potencia, compensar corrientes
de secuencia cero en sistemas balanceados o desbalanceados, compensar desbalances de
tensión en algunas aplicaciones e incluso suministrar energía a cargas críticas durante
intervalos corto de tiempo. Esta clase de equipo representa un nivel inferior de calidad
suministrada comparados con los sistemas de alimentación ininterrumpible (SAI), sin embargo
su costo se ve reducido considerablemente en comparación.
Esta clase de equipos han sido estudiados desde que sus principios básicos fueron
propuestos en la década de los 70´s. La necesidad de compensar distorsiones en menos de un
ciclo de red, además de compensar variaciones rápidas en la amplitud de los armónicos y no
introducir armónicos adicionales al sistema, lleva a la consideración exclusiva de
convertidores electrónicos conmutando a alta frecuencia y con control mediante Modulación
de Anchura de Pulso (PWM por sus siglas en inglés, como es más conocido). Por otra parte,
existen diferentes estructuras, tanto para compensación monofásica como trifásica. Cada filtro
activo puede ser clasificado de acuerdo a la variable eléctrica que compensan; de esta manera,
existen filtros activos de tensión (también conocidos como filtros activos serie por la manera
como se conectan a la red de eléctrica), filtros activos de corriente y filtros activos universales.
Estos últimos compensan ambas variables. A continuación se presentarán las características
básicas de cada uno:
Filtros activos de tensión.
Como su nombre lo indica, el objetivo de estos sistemas es compensar las perturbaciones
de tensión. Son capaces de compensar las variaciones lentas y rápidas de tensión atenuando
ruidos en modo común y en modo diferencial. Por lo tanto, las únicas perturbaciones que no
son capaces de ser compensadas por esta clase de equipos son los cortes largos de tensión, de
los cuales se encarga los SAI. Aún cuando la variable que compensan es la tensión, el
principio de funcionamiento y los esquemas de potencia difieren de los reguladores. La Figura
21
2.14 muestra el circuito equivalente del filtro activo de tensión con la cual se puede interpretar
mejor su funcionamiento.
Zs
Vs
Vcp
Zcarga
Figura 2.14: Circuito equivalente del filtro activo de tensión.
La Figura 2.14 muestra una tensión de red perturbada; la fuente Vcp hace las veces del
filtro activo de tensión, puede verse que está conectada en serie entre la red y la carga, por lo
que también se le llama filtro activo serie e impone una tensión de igual magnitud que las
perturbaciones de la red, pero en contrafase, con lo cual la carga recibe teóricamente una señal
senoidal pura. El filtro basa su estructura en un convertidor, el cual toma la energía de la
misma red para efectuar la compensación. Para llevar a cabo la conexión a red, el filtro activo
utiliza un transformador de corriente, cuyo devanado primario se conecta entre la red y la
carga y el devanado secundario se conecta al convertidor de potencia. Comúnmente se utilizan
convertidores medio puente o puente completo dependiendo de la aplicación y a su vez
pueden ser alimentados en corriente o tensión con salida en tensión.
Filtro activo de corriente.
El consumo de corriente de cargas con características no lineales, presenta componentes
armónicas, las cuales al circular por la impedancia de la red, que es diferente de cero, provoca
caídas de tensión que a su vez distorsionan la tensión en el punto de conexión común. No
obstante, esta clase de cargas requiere de estas corrientes para funcionar; por lo tanto, una
forma de solucionar el problema es conectar en paralelo con la carga un equipo que haga las
veces de una fuente de corriente cuyo valor en todo instante sea igual que las corrientes
armónicas demandadas por la carga evitando así que circulen por la red. Esta función puede
ser llevada a cabo mediante el uso de filtros pasivos, pero la amplia gama de armónicos a
compensar y la interacción de estos filtros con la impedancia de red, hacen que no sea una
solución óptima. Otra opción es el uso de convertidores electrónicos los cuales inyecten la
corriente armónica a la carga de forma controlada, de esta manera es posible interpretar que el
conjunto de la carga con el convertidor mencionado, funcionan como una carga lineal. La
Figura 2.15 muestra el circuito equivalente del filtro activo, se le llama filtro activo de
corriente debido a la función que cumple, y también se le conoce como filtro activo paralelo
por el modo de conexión con la red. Asimismo, en la Figura 2.15, IL es la corriente que
demanda la carga, la cual esta formada por una componente fundamental I1 y una cantidad de
armónicos representados por Ih, el filtro activo de corriente inyecta a la carga la componente
Ih, por lo cual por la red circula únicamente la componente fundamental I1.
22
i s=i1
i L=i 1 +ih
ih
Vs
Carga
VL
Figura 2.15: Circuito equivalente del filtro activo de corriente.
Es importante mencionar que esta clase filtros pueden usarse en combinación con filtros
pasivos, a esta variedad se le conoce como filtros híbridos. De igual manera que en los filtros
de tensión, existen formas de construir físicamente esta clase de filtros, en versiones
monofásicas y trifásicas; con inversores medio puente o puente completo, alimentados en
tensión o en corriente, etc.
Filtro activo universal.
Existen filtros activos que combinan ambas opciones para compensar tanto tensión como
corriente; por añadidura se les conoce como filtros activos universales. La Figura 2.16 muestra
el diagrama equivalente del filtro. Puede verse en la figura que ambos filtros comparten el
almacén de energía; esto es con el objetivo de optimizar la topología evitando que se
dupliquen componentes y se incremente el costo del equipo. Con estas condiciones, el filtro
activo universal podría compensar potencia reactiva, cancelar algunas perturbaciones de
tensión y equilibrar cargas entre fases.
Zs
Vs
is
Almacén de
energía
compartido
Vcp
iL
VL
VL
Carga
Figura 2.16: Circuito equivalente del filtro activo universal
La combinación de las posiciones de cada filtro activo, en un filtro activo universal puede
realizarse de diferentes maneras. La Figura 2.16 muestra los circuitos equivalentes para cada
una de las posibilidades; en cada opción, las topologías pueden estar de forma independiente o
interconectadas.
23
Ventajas:
Pueden compensar corrientes armónicas y factor de potencia simultáneamente.
Llevan acabo la compensación en tiempos inferiores a un ciclo de línea.
Existe flexibilidad en sus esquemas de control.
No presentan problemas de resonancia.
El tamaño de los equipos es menor.
Se puede compensar un amplio rango de armónicos con un solo equipo.
Desventajas:
Presentan costos demasiados altos para su aplicación masiva en la solución de la
reducción de corrientes armónicas y compensación del factor de potencia.
No son universales en el sentido de que se requiere una nueva sintonización del filtro si
este cambia de una aplicación a otra.
2.2.8.- Técnica de capacitores conmutados [13].
En la figura 2.17a se muestra un filtro de capacitor conmutado. El principio de operación
de esta técnica se basa en lo siguiente: se tienen dos capacitores en paralelo con un interruptor
bidireccional de estado sólido, en serie con cada capacitor. La combinación se conecta a una
rama principal a través de un inductor el cual sirve para limitar la di / dt . Los dos
interruptores S1 y S2 se operan en antifase, de tal manera que la corriente Isc fluye a través de
dos ramas alternativamente. Una tercera rama contiene un pequeño resistor el cual se
conmuta durante el periodo de transición entre el cambio de capacitor de manera que la
transferencia de corriente entre los dos capacitores sea tolerable, como se muestra en la
figura 2.17a.
El valor de los capacitores, el inductor y el patrón de conmutación
características del filtro.
definen las
24
Isc
Vs
L
on
S1
S2
S3
C1
C2
R
S1
off
on
S2
off
on
S3 off
a)
RE
(b)
L
Isc
S1
S2
C1
C2
Vs
Vx
Vc1
Vc2
c)
Figura 2.17: (a) Filtro de capacitor conmutado, (b) Patrón de
conmutación, (c) Circuito simplificado del filtro con capacitor
conmutado.
El principio fundamental de esta técnica [14] es el de modificar la forma de onda de la
corriente que toma el rectificador IR , conmutando los capacitores C1, C2 y la resistencia R de
acuerdo a un patrón de conmutación como se muestra en la figura 2.1b.
Lo
Vs1
IL
Io
IR
Vs2
RL
Vs3
Isc
L
L
L
S1
S2
S3
S1
S2
S3
S1
S2
S3
C1
C2
R
C1
C2
R
C1
C2
R
Figura 2.18: Circuito de capacitores conmutados.
La corriente de compensación Isc (figura 2.18) puede ajustarse a una forma de onda
requerida, de manera que las corrientes armónicas puedan ser absorbidas por el filtro,
reduciendo el contenido armónico hacia la línea de alimentación.
25
Las ventajas
continuación:
que
presenta
este
método sobre los antes mencionados se listan a
Ventajas:
No necesita un transformador para introducir cambios de fase.
Puede eliminar un número elevado de componentes armónicas.
La impedancia del sistema no es parte del criterio de diseño.
Su sistema de control por medio de µ P puede usarse en diferentes aplicaciones.
Desventajas:
Una de las desventajas de este método, es que necesita tres interruptores semiconductores
por cada una de las fases de entrada para conmutar los capacitores.
2.3 Conclusiones
Después de haber presentados los diferentes problemas que producen las corrientes
armónicas y haber analizado la repercusión que tienen éstas en todo el sistema, es necesario
utilizar ciertas estrategias que nos permitan controlar o mantener dentro de los límites
establecidos estos niveles de corrientes armónicas. Esto redunda en beneficio de todas las
partes involucradas. Para las compañías de suministro eléctrico es importante debido a que
proporcionaría un mejor servicio y, sobre todo, optimizaría el ahorro de energía; para los
usuarios es importante debido a que no se le presentarían los problemas antes mencionados.
De los métodos para reducir las corrientes armónicas presentados en este estudio, y
después de analizar y comparar sus ventajas y desventajas, se ha decidido que una de las
mejores estrategias utilizadas para el control y eliminación de las corrientes armónicas es la
técnica de capacitores conmutados por las siguientes razones: con un solo filtro se pueden
eliminar un amplio número de componentes armónicas, la frecuencia de conmutación de los
interruptores es baja si se compara con la utilizada por los interruptores de los filtros
activos, no se requiere un transformador adicional y la arquitectura del control es menos
compleja que la de un filtro activo.
26
Capítulo
3
Técnica de capacitores conmutados
3.1
Introducción.
En tiempos pasados, la técnica de capacitores conmutados no fue de gran interés debido a
la limitación que existía en la velocidad de conmutación de los interruptores existentes. Hoy
en día esta técnica ha resurgido en aplicaciones tales como la inyección de corrientes
reactivas o en la eliminación de corrientes armónicas debido a que actualmente se cuenta con
dispositivos de conmutación de estado sólido, de alta velocidad y gran robustez.
3.1.1 Principio de operación de la técnica de capacitores conmutados
El principio de operación de ésta técnica se basa en lo siguiente [14]: un filtro de capacitor
conmutado se muestra en la figura 3.1. Este consiste de dos capacitores en paralelo (C1 y C2)
con un interruptor bidireccional de estado sólido en serie con cada capacitor (S1 y S2). Los
interruptores pueden ser semiconductores tales como transistores, GTO's o MOSFET's. Los
interruptores S1 y S2 se operan en antifase mediante un patrón de conmutación, de tal manera
que la corriente Isc fluye a través de dos ramas alternativamente como se muestra en la figura
3.2. En implementaciones prácticas es necesario limitar la corriente en los interruptores, por
ello la combinación se conecta a una rama principal a través de un inductor el cual sirve para
limitar el di dt (figura 3.3).
Isc
Vs
L
S1
S2
C1
C2
a)
S1
S2
on
off
off
on
(b)
Figura 3.1: (a) Filtro de capacitor conmutado, b) Patrón de
conmutación.
27
RE
RE
Isc
Isc
Vs
s1
s2
C1
C2
Vs
s1
s2
C1
C2
a)
b)
Figura. 3.2: (a) Flujo de corriente a través de C1 b) Flujo de
corriente a través de C2.
La corriente demandada de la fuente es función de los parámetros del circuito C1, C2, L, y
de la resistencia interna de la fuente Re. La característica importante de este circuito es que el
orden de las corrientes armónicas y sus magnitudes demandadas de la fuente pueden ser
fácilmente controladas. El valor de los capacitores, el inductor y el patrón de conmutación
definen las características del filtro.
RE
L
Isc
S1
S2
Vs
Vx
Vc1
C1
C2
Vc2
Figura 3.3: Filtro de capacitor conmutado con inductor limitador
de corriente.
3.1.2
Circuito práctico.
En el filtro de capacitor conmutado (Fig. 3.3) discutido en la sección anterior, los
interruptores S1 y S2 se abren y cierran alternativamente en el mismo instante. Sin embargo
todos los interruptores de estado sólido tienen tiempos de encendido-apagado, los cuales hay
que tomar en consideración en las implementaciones de tales circuitos.
Si ambos interruptores están cerrados simultáneamente y si existe una diferencia de
voltaje entre las dos ramas, se produciría una gran corriente transitoria en los interruptores la
cual no podría ser tolerada. Por el contrario, si ambos interruptores están abiertos
simultáneamente mientras hay una corriente a través del inductor, la energía almacenada en
este produciría un alto voltaje transitorio entre los interruptores llegando a ocasionar daños a
los dispositivos.
28
Ambos inconvenientes pueden ser resueltos introduciendo una tercera rama en paralelo
que consiste de un resistor en serie con un interruptor de estado sólido como se muestra en la
figura 3.4.
RE
Isc
L
S1
S2
S3
C1
C2
R
Vs
S1
S2
S3
on
off
on
off
on
off
a)
(b)
Figura 3.4 a) Filtro con capacitor conmutado con una tercera
rama, b) Patrón de conmutación.
La operación del circuito modificado es el siguiente: para transferir la corriente de la rama
de un capacitor a la otra, el interruptor S3 se cierra por un corto periodo de tiempo. La
magnitud de tiempo que permanece cerrado S3 depende del patrón de conmutación
3.2
Técnica de modulación
El patrón de conmutación aplicado al circuito de capacitores conmutados emplea la
técnica de modulación por ancho de pulso PWM (por sus siglas en Ingles), la cual se ilustra en
la figura 3.5, la que muestra una onda triangular portadora de amplitud Ac y una onda seno
de referencia de amplitud Ar.
Ac
Onda
Portadora
Ar
Onda
de
referencia
FS1
α0 α 1 α2
αk
Figura 3.5 Generación de la función PWM.
La relación
Ar
, determina el ancho del pulso y se conoce como índice de modulación
Ac
(M).
M =
Ar
Ac
(3.1)
29
El parámetro αk es el instante de la k-ésima intersección entre la onda triangular
portadora y la onda seno de referencia como se muestra en la figura 3.5. El último valor de k
es dos veces el número de pulsos (N) por ciclo. La principal característica de esta forma de
onda PWM es que el ancho de pulso es una función del índice de modulación y la frecuencia
de la onda portadora. Variando la frecuencia de la onda portadora cambia el número de pulsos
N y variando el índice de modulación cambia el ancho de los pulsos.
Por tanto, para determinar el ancho de los pulsos es necesario determinar los puntos de
intersección entre la onda triangular portadora y la onda seno de referencia. La figura 3.5
muestra que el primer punto de intersección α0 ocurre a cero radianes. Haciendo referencia a
esta misma figura para α1 se aplica la siguiente ecuación:
Ar sen(α1 ) = Ac(−
2N
π
α1 + 2)
(3.2)
La relación de Ar/Ac se definió como el índice de modulación, por tanto la ecuación (3.2)
se puede escribir como:
M sen(α1 ) = −
2N
π
α1 + 2
(3.3)
Esta última ecuación puede ser escrita como sigue:
α1 =
π
2N
(2 − M sen(α1 ) )
(3.4)
La figura 3.5 muestra que para los puntos de intersección α1,α2,α3,..., αk-1 la onda
triangular portadora tiene la misma pendiente. Entonces siguiendo el mismo procedimiento
tenemos:
αk =
π
2N
(2k − M sen(α k ) )
(3.5)
donde k es un entero impar.
Para α2 la expresión es:
α2 =
π
2N
(4 + M sen(α 2 ) )
(3.6)
De igual forma, la figura 3.5 muestra que para α2,α4,α6,αk la onda triangular tiene la
misma pendiente. Por lo tanto:
αk =
π
2N
(2k + M sen(α k ) )
(3.7)
30
donde k es un entero par.
Observando la ecuación (3.5) y (3.7) vemos que en general:
αk =
(2k + (− 1) M sen(α ))
2N
π
k
(3.8)
k
La ecuación (3.8) es la ecuación final que define la magnitud de αk para diferentes
números de pulsos N y diferentes índices de modulación. Como se muestra en la figura 3.6 el
ancho del pulso (W) puede ser determinado considerando únicamente la mitad de los puntos
de intersección, entonces los parámetros k varían de 1 a N-1. Esto también muestra que los
valores de αN son 0 y π respectivamente. La solución de la ecuación trascendental se realiza
mediante análisis numérico. El método de Newton Raphson es un método iterativo para
resolver ecuaciones F(x)=0, donde F es diferenciable. La fórmula general es la siguiente:
ω1 ω 2 ω 3 ω 4
ω2 ω1
π
α0
α1
ω6 ω 5 ω 4 ω 3
ω5 ω6
α2
α3
α4
αΝ−1
αΝ
Figura 3.6 Anchos de pulsos de la función PWM.
xn+1 = x n −
f ( xn )
f ' ( xn )
(3.9)
Aplicando el método de Newton Raphson a la ecuación (3.8) produce:
( )
π
)
(
f αk =
2k + (−1) k M sen(α k ) − α k
2N
f ' (α k ) =
((−1)
2N
π
k
)
M cos(α k ) − 1
(3.10)
(3.11)
31
α k +1 = α k −
f (α k )
f ' (α k )
(3.12)
Para iniciar este método iterativo es necesario un valor inicial para αk, dado por la
siguiente ecuación:
αk =
π
N
(
− 1)k
k+
4
(3.13)
Tanto el patrón de conmutación obtenido como la onda seno de referencia tienen la
misma frecuencia. Sin embargo, para investigar el funcionamiento del circuito de capacitores
conmutados para un patrón particular PWM pero para diferentes frecuencias de conmutación,
el patrón de conmutación inicial necesita ser ejecutado Fs veces por ciclo de la frecuencia de
línea. Por lo tanto los valores de αk debe ser recalculados de acuerdo a la frecuencia de
conmutación Fs.
La figura 3.7 muestra un diagrama de flujo para obtener los valores de αk.
32
INICIO
Leer
Numero de pulsos N
Indice de modulación M
Frecuencia de conmutación Fs
Evaluar la ec. (4.13)
αk =
(−1 )k
π
k+
N
4
Evaluar la ecuación (4.10)
(
)
π
f (αk )=
2k + ( −1) k Msen(αk ) − αk
2N
Evaluar el próximo punto de intersección
ec. (4.12).
αk +1 = αk −
ακ+1 de la
f (αk )
f ' (αk )
f (αk ) ≤ 10 −4
Almacenar α0 ….αN para la mitad
del ciclo
Obtener la otra mitad del ciclo para
αN+1 ….αK
Obtener el patrón de conmutación
completo de acuerdo a Fs
END
Figura 3.7 Diagrama de flujo para obtener los valores de αk.
33
3.3
Análisis de la técnica de capacitores conmutados
Para propósito del análisis del circuito de capacitores conmutados, se toman las
siguientes consideraciones:
a) Los interruptores S1 y S2 se consideran ideales.
b) La tercera rama mencionada en la sección 3.1.2 se desprecia debido a que el tiempo que
permanece encendido S3 es despreciable comparado con el ancho del pulso de S1 o S2
Tomando en cuenta estas consideraciones, el modelo
capacitores conmutados mostrado en la figura 3.3 es:
L
d 2 i sc
dt
2
+ RE
matemático del circuito de
di sc 1
+ i sc = Vpω cos ωt
dt
C
donde:
RE = Resistencia interna de la fuente.
Este sistema de 2° orden se puede expresar como un conjunto de ecuaciones diferenciales
de 1er orden como sigue:
di sc 1
= (V s (t ) − ( R E i sc (t ) + V x (t ) )
dt
L
dV x i sc (t )
=
dt
C
V /s
A/ s
(3.14)
(3.15)
Donde Vx es el voltaje a través de los capacitores y el valor de C puede ser C1 o C2 de
acuerdo al patrón de conmutación que se muestra en la figura 3.8.
34
Ac Ar
FS1
C1
α0 α1 α2 α3
α 4 α5 α 6 α 7 α 8 α 9α10 α 11 α 12
FS2
C2
Figura 3.8: Patrones de conmutación para cada uno de los
capacitores.
Para evaluar el circuito de capacitores conmutados para diferentes patrones de
conmutación y diferentes arreglos de valores de los parámetros del circuito, se utilizó el
método de Run G. Kutta de cuarto orden.
Con base a las ecuaciones del sistema
di sc 1
= (Vs (t ) − R E i sc + V x (t ))
dt
L
dV x i sc (t )
=
dt
C
A/ s
V /s
El método de Rung G. Kutta establece que:
k1 =
(
h
V p sen(ω t ) − V x − RE i sc
L
)
h
i sc
C
q
k
h
h
k 2 = V p sen ω t + − V x + 1 − R E i sc + 1
2
2
L
2
q1 =
q2 =
k
h
(i sc + 1 )
2
C
k3 =
h
V p sen ω t +
L
q
k
h
− V x + 2 − R E i sc + 2
2
2
2
35
(
)
k4 =
h
V p sen[ω (t + h )] − (V x + q3 ) − R E (i sc + k 3 )
L
q4 =
h
(isc + k 3 )
C
donde:
h = Incremento de tiempo (tamaño del paso)
Y de acuerdo al método se tiene finalmente que:
i sc = i sc +
1
(k1 + 2k 2 + 2k 3 + k 4 )
6
Vx = Vx +
1
(q1 + 2q 2 + 2q3 + q 4 )
6
Como se mencionó en la sección anterior, el patrón de conmutación depende del número
de pulsos N, y el índice de modulación M. El tercer parámetro Fs, determina el número de
veces que el patrón de conmutación inicial será ejecutado por ciclo de línea. Por lo tanto los
tres parámetros se requieren para generar diferentes patrones de conmutación. Un ejemplo
típico se muestra en la figura 3.9 para N=3, M=0.8 y Fs=2.
N=3
N=3
M=0.8
M=0.8
Ciclo de línea
Fs=2
Figura 3.9: Patrón Típico de conmutación.
Para evaluar la corriente en el filtro durante un ciclo de línea es necesario conocer los
intervalos de conmutación (PWM) para ello es necesario saber el valor de N, M, Fs y también
es necesario conocer los valores de los capacitores C1, C2 y L.
36
Todos estos parámetros se determinan en forma aleatoria. Primeramente los intervalos de
conmutación (α1,α2,α3,α4,α5,.., αk-1 ) se calcularon usando el método de Newton Raphson y
posteriormente los valores de C1, C2 y L utilizando el método de Rung G. Kutta hasta
obtener los mejores resultados de la nueva corriente de línea la cual calculamos de la
siguiente forma:
I L = Isc + Ir
(3.16)
donde:
IL = Corriente línea.
Isc = Corriente a través del filtro.
IR = Corriente hacia el convertidor.
Se realizó un programa en turbo Pascal para el cálculo de esta corriente de línea: en este
programa primeramente se calculan los intervalos de conmutación mediante el método de
Newton Raphson y con ellos se calcula la corriente Isc por medio del método de Rung G.
Kutta para posteriormente calcular la corriente de línea IL.
Una vez calculada IL es necesario saber si se mejoro su contenido armónico, para saberlo,
volvemos a determinar cada una de las magnitudes de las armónicas de la corriente de línea de
utilizando integración numérica de acuerdo a las siguientes ecuaciones:
An = An + ∆ t ∗ I L cos( Nn ∗ ω ∗ j ∗ h )
B n = B n + ∆ t ∗ I L sen ( Nn ∗ ω ∗ j ∗ h )
donde:
An
Bn
Nn
∆t
j
I =
n
(3.17)
= Amplitud de la componente armónica par.
= Amplitud de la componente armónica impar.
= orden de la armónica.
= Incremento o paso en la integración.
= Contador.
2
2
An + Bn = Magnitud absoluta de la armónica.
Con esto se calculó la amplitud hasta la armónica de orden 49 a y el parámetro en el cual
nos basamos para determinar la mejora de la onda fue el factor de distorsión:
37
FD =
I1
∞
; n = 1, 5, 7, 11, 13, ...
(3.18)
∑ I n2
n =1
donde:
FD = Factor de distorsión
I1 = Componente fundamental de la corriente
In = n-ésima componente armónica
Después de haber ejecutado el programa en repetidas ocasiones se encontró que los
mejores valores de los parámetros del patrón de conmutación y del circuito que
compensaron más eficientemente el contenido armónico de la corriente de línea fueron:
N
M
Fs
C1
C2
L
=3
= 0.7
=2
= 17.5 µF
= 8 µF
= 8 mH
FD = 0.987
El intervalo de variación de los parámetros fue:
6≥ N ≥2
0 .9 ≥ M ≥ 0 .1
8 ≥ Fs ≥ 2
Finalmente, el circuito completo para la reducción de corrientes armónicas en un
convertidor trifásico de 6 pulsos se muestra en la figura 3.10. En el apéndice A1 se muestra el
listado del programa editado en Turbo Pascal para la solución de este sistema de ecuaciones
diferenciales simultáneas usando el Método de Run G. Kutta de 4o orden. Los parámetros del
circuito (C1, C2, L) y los intervalos de conmutación α0....αk mediante ésta estrategia son
seleccionados arbitrariamente tomando como referencia el factor de distorsión de la corriente
de línea. Mientras más cercano a la unidad se encuentra el factor de distorsión, será una
medida indicativa de que existen menos componentes armónicas en la corriente de línea. Los
diagramas de flujo de las figura 3.11 y 3.12 muestran la secuencia lógica de las rutinas del
programa de computadora.
38
Lo
Vs1
IL
Io
IR
Vs2
RL
Vs3
Isc
L
L
L
S1
S2
S3
S1
S2
S3
S1
S2
S3
C1
C2
R
C1
C2
R
C1
C2
R
Figura 3.10: Circuito de capacitores conmutados.
39
INICIO
LEER PARAMETROS DEL CIRCUITO
C1, C2, L, Re, V, T, ti, tf
CAMBIAR αo αk DE RADIANES
A SEGUNDOS ti...tf
ESTABLECER CONDICIONES INICIALES
Isc = 0, Vc1 = 0, Vc2 = 0,
t = 0, k = 0
ESTABLECER UN INTERVALO DE
DE TIEMPO t k < t < k
t +1
LLAMAR LA SUBRUTINA DE RUNGE-KUTA
PARA EVALUAR Isc Y Vx (C = C1) DURANTE
t k < t < k+1
t
k=k+1
LLAMAR LA SUBRUTINA DE RUNGE-KUTA
PARA EVALUAR Isc Y Vx (C = C2) DURANTE
t k < t < tk+1
k=k+1
SI
t<T
NO
INICIALIZAR EL
NO
PROXIMO CICLO
t = 0, k = 0
EVALUADOS 20
CICLOS DE LINEA
SI
EVALUAR EL CONTENIDO ARMONICO
DE LA CORRIENTE DE LINEA IL
ESCRIBIR LOS COEFICIENTES DE FOURIER
An y Bn
FIN
Figura 3.11 Diagrama de flujo para el cálculo de Isc, Vx e IL.
40
INICIO
EVALUAR LOS COEFICIENTES DEL
METODO DE RUNGE-KUTA
k1, k2, k3, k4, q1, q2, q3, q4
EVALUAR EL PROXIMO VALOR DE
Isc(m+1) = f (Isc, m, k1, k2, k3, k4)
EVALUAR EL PROXIMO VALOR DE
Vx (m+1) = f (Vx, m, q1, q2, q3, q4)
EVALUAR LA CORRIENTE DEL RECTIFICADOR
Ir
EVALUAR LA CORRIENTE DE LINEA
I L = Isc + Ir
t = t + ∆t
NO
t > tk+1
SI
FIN
Figura 3.12 Diagrama de flujo para la subrutina del método de
Rung G. Kutta.
En la figura 3.13 se presentan los resultados de la simulación y en ella se muestran las
formas de onda de la corriente del rectificador, corriente de línea compensada, corriente a
través del filtro y el patrón de conmutación. En esta figura se observa que la corriente de línea
se ha mejorado considerablemente. Los resultados experimentales mediante esta estrategia
se presentan en el capítulo de pruebas y resultados.
41
Figura 3.13: Resultados de la simulación. a) Corriente de
entrada no compensada. b) Corriente del filtro c) Corriente de
entrada compensada d) Patrón de conmutación (para S1).
42
Capítulo 4
Optimización del filtro de capacitores conmutados
4.1
Introducción
Como se mencionó en el capítulo 2, el circuito de capacitores conmutados (CC) se puede
utilizar para modificar el contenido armónico de la corriente de línea inyectado por sistemas
convertidores.
En el capítulo anterior la conmutación de los capacitores sigue una patrón de conmutación
PWM, las corrientes armónicas son evaluadas utilizando el método de Rung G. Kutta y los
parámetros del circuito y el patrón de conmutación son seleccionados aleatoriamente
mediante procesos iterativos, tomando como referencia el factor de distorsión de la corriente
de línea para decidir cual de estos valores son los más aceptables. En este capítulo se realiza
el análisis de Fourier de un ciclo de la corriente de línea, la magnitud y el orden de las
armónicas a ser eliminadas se introducen en un conjunto de ecuaciones simultáneas para
posteriormente ser minimizadas utilizando el método de gradientes conjugados, y obtener los
valores de los parámetros del circuito de capacitores conmutados y los intervalos de
conmutación óptimos
4.2
Método de optimización aplicando gradientes conjugados.
En la técnica anterior, la respuesta del filtro de CC se determinó para un conjunto de
parámetros del circuito y patrones de conmutación. El uso de esta información permite al filtro
de CC sintonizarse para varias frecuencias. En contraste, el uso del método de gradientes
conjugados que se describe enseguida es bastante diferente. La información de las
magnitudes, orden y ángulo de fase de las armónicas que se requieren eliminar y a las cuales
se debe sintonizar el filtro, se usan para resolver un conjunto de ecuaciones simultáneas para
determinar el patrón de conmutación óptimo y los valores de los parámetros del circuito de
CC.
4.3 Análisis
El análisis se basa en las siguientes suposiciones.
El periodo de transición entre las dos ramas de los capacitores se desprecia. Esto se
realiza seleccionando las constantes de tiempo RC1 y RC2 para que sean mucho más
grandes que el tiempo que permanece cerrado S3.
Los interruptores S1 y S2 se consideran ideales.
43
El inductor para limitar el di / dt se desprecia. Los resultados experimentales justifican
estas suposiciones.
De acuerdo a las consideraciones anteriores, el circuito simplificado de CC se muestra en
la figura 4.1.
Isc
S1
Vs
S2
Isc1
Isc2
C1
C2
Figura 4.1. Circuito simplificado del filtro con capacitor
conmutado.
El objetivo del análisis, es determinar la magnitud de C1, C2 y el patrón de conmutación
para satisfacer las características del filtro con base a las armónicas que se requieren filtrar.
Del circuito de la figura 4.1, el voltaje de entrada es senoidal, es decir:
Vs = Vp sen ωt
(4.1.)
Este voltaje aparece a través del capacitor C1 cuando el interruptor S1 está cerrado (S2
abierto) y aparece a través de C2 cuando S2 está cerrado (S1 abierto) de tal forma que la
corriente en el filtro i sc , se puede expresar como:
i sc (t ) = C k
dVs
dt
i sc (t ) = C kVp ω cos ωt
(4.2.)
En donde k = 1 cuando S1 esta cerrado y k = 2 cuando S2 esta cerrado. La forma de onda
de la corriente a través del circuito de CC, se muestra en la Figura 4.2
44
Isc
xm-1
x1
xm
xm+1
Figura 4.2. Forma de onda de la corriente a través del filtro.
Esta corriente se puede expresar mediante una serie trigonométrica de Fourier de la
siguiente manera:
∞
i sc (t ) = ∑ (An sen (nωt ) + Bn cos(nωt ))
(4.3.)
n =1
donde:
An =
Bn =
1
π∫
1
π∫
2π
0
2π
0
i sc sen(nωt )dt
(4.4.)
i sc cos(nωt )dt
(4.5.)
Haciendo un cambio de variable x = ωt y sustituyendo la ecuación (4.2) en (4.4) y (4.5)
se tiene:
An =
Bn =
1
π
1
π
∫
∫
2π
0
2π
0
C k V p ω cos xsen(nx )dx
(4.6.)
C k V p ω cos × cos(nx ) dx
(4.7.)
Para determinar los intervalos de conmutación y las componentes de la serie de Fourier
nos basamos en la Figura 4.3 en la cual se muestra un ciclo completo del voltaje de línea Vm y
el patrón de conmutación para el capacitor C1 (El patrón complementario para C2 no se
muestra). El patrón de conmutación sigue la siguiente secuencia. Durante el intervalo de 0 a
45
X1, el interruptor S1 está cerrado (S2 está abierto). De X1 a X2, S2 está cerrado (S1 está
abierto), de X2 a X3,,el interruptor S1 está cerrado (S2 abierto) y así hasta el intervalo de Xm-1
a Xm durante el cual el interruptor S1 está cerrado y finalmente Xm a 2π donde S2 está cerrado
(S1 está abierto). Siguiendo esta secuencia, los coeficientes An y Bn de las ecuaciones (4.6) y
(4.7) se pueden escribir como sigue:
Vm
S1 cerrado
S1 abierto
X1
X2
X3
X4
X5
X m-1
Xm
2π
Figura 4.3: Patrón de conmutación para S1.
An =
V pω
π
[ ∫ C1 cos x sen(nx )d x + ∫ C 2 cos xsen(nx )dx + ∫ C1 cos x sen(nx )dx
x1
x2
x3
0
x1
x2
x4
2π
x3
xm
+ ∫ C 2 cos x sen(nx )dx + KK + ∫
Bn =
V pω
π
C 2 cos x sen(nx )dx
(4.8.)
[ ∫ C1 cos× cos nxdx + ∫ C 2 cos x cos(nx )dx + ∫ C1 cos x cos(nx )dx
x1
x2
0
x1
x3
x2
x4
2π
x3
xm
+ ∫ C 2 cos x cos(nx )dx + KK + ∫
C 2 cos x cos(nx )dx]
(4.9.)
Después de la integración para n=1 se tiene:
A1 =
V pω
[C1 (1 − cos 2 x1 ) +C2 (cos 2 x2 − cos 2 x3 ) +C1 (cos 2 x2 − cos 2 x3 )
4π
+C2 (cos 2 x3 − cos 2 x4 ) +.... + C 2(cos 2 xm − 1)]
(4.10.)
46
V pω
sen2 x3
sen2 x1
sen2 x 2
sen2 x1
sen2 x 2
) +C 2 ( x 2 +
) + C1 ( x3 +
− x1 −
− x2 −
)
2π
2
2
2
2
2
sen2 x3
sen2 x m
sen2 x 4
+C 2 ( x 4 +
− x3 −
)
(4.11.)
) + .... +C 2 (2π − x m −
2
2
2
B1 =
[C1 ( x1 +
Integrando para n>1 se tiene:
V pω
An =
2π
m −1
∑{C1 [
i
cos(1 − n) x i +1 − cos(1 − n) x i
cos(1 + n) x i − cos(1 + n) x i +1
]
)+
n +1
n −1
cos(1 + n) xi +1 − cos(1 + n) xi + 2 cos(1 − n) xi + 2 − cos(1 − n) xi +1
)]
+C 2 [
+
n +1
1− n
}
(4.12.)
i = 0,2,4...
Bn =
V p ω m −1
2π
∑{C1[
i
sen(1 + n) xi +1 − sen(1 + n) xi
sen(1 − n) xi +1 − sen(1 − n) xi
)+
]
1+ n
1− n
sen(n + 1) xi + 2 − sen(n + 1) xi +1 sen(1 − n) xi + 2 − sen(1 − n) xi
)]
+C 2 [
+
n +1
n −1
}
(4.13.)
i = 0,2,4...
Se puede observar en las ecuaciones (4.12) y (4.13) que las incógnitas presentes son los
valores de los capacitores C1 y C2 y los intervalos de conmutación X1, X2 , X3, ... Xm.
Suponiendo que m=11 (6 pulsos por ciclo), el número de incógnitas sería 13, es decir X1, X2,
X3... X11, C1 y C2 y para determinar éstas incógnitas se requieren 13 ecuaciones. Esto
implicaría proponer trece ecuaciones en la función costo la cual se explica más adelante, y
con ello tenemos la posibilidad de reducir las componentes armónicas 5ª , 7ª, 11ª y 13ª . Si se
aumenta el número de pulsos por ciclo del voltaje de línea, se tendría un mayor número de
ecuaciones en la función costo y como consecuencia la posibilidad de reducir un mayor
número de componentes armónicas.
La corriente Isc a través del circuito de capacitores conmutados se puede expresar como
sigue:
∞
I sc = ∑ {X n sin (nωt ) + Yn cos(nωt )}
(4.14.)
n =1
Donde Xn y Yn son los coeficientes de las corrientes armónicas a ser filtradas. El
método propuesto en esta técnica consiste en optimizar este sistema de ecuaciones
considerando la magnitud de Xn y Yn. (5, 7, 11, 13, etc.) de acuerdo a una función costo.
Para la optimización del sistema (Valores de los capacitores y el patrón de conmutación) se
47
realizó un programa en Turbo Pascal utilizando el método de gradientes conjugados de
acuerdo a una función costo como sigue:
1. Se da un valor inicial a la magnitud de los capacitores y los intervalos de conmutación
aleatoriamente. (C1°,C2°, X1°, X2°,X3°...Xm°).
2. Se introduce la magnitud de los coeficientes de las armónicas a ser filtradas (Xn y Yn).
3. Se calcula An y Bn de las ecuaciones (4.12) y (4.13).
4. Se evalúa la función costo J de la siguiente manera:
∞
J = ∑ ( An − X n ) 2 + (Bn − Yn ) 2
(4.15.)
n =1
y se calculan las derivadas de la función costo como sigue:
∂ An
∂ Bn
∂J
= 2( An − X n )
+ 2(Bn − Yn )
∂xi
∂ xi
∂ xi
(4.16.)
donde xi es una de las variables X1, X2 , X3, ... Xm, C1 y C2. Y se evalúa el gradiente de la
función costo.
∂J ∂J ∂J
∂J ∂J ∂J
g=
,
,
,....
,
,
∂x m ∂C1 ∂C 2
∂x1 ∂x 2 ∂x 3
T
(4.17.)
5. El método de la dirección del gradiente se emplea para determinar el mínimo valor de la
función costo J y determinar los valores óptimos de los capacitores y los intervalos de
conmutación como sigue:
a). La dirección de pasos descendentes ( d 0 ) se iguala con − g 0 donde g ° es el valor inicial
del gradiente evaluado en X°.
b). β es un escalar (por ejemplo 1x10-5).
c). Los valores de los capacitores y los intervalos de conmutación son transformados como
sigue:
o
xi = x i + β d 0
(4.18.)
donde xi o son las valores iniciales de C1°,C2°, X1°, X2°,X3°...Xm°.
d). Los valores de An y Bn se calculan usando las ecuaciones (4.12) y (4.13).
e). La función costo J es evaluada nuevamente
f). β se incrementa y los pasos de c) a f) se repiten hasta encontrar el valor mínimo de J.
g). La nueva dirección de pasos descendentes ( d k +1 ) se calcula:
48
d k +1 = − g k +1 +
g Tk +1 g k +1
T
gk gk
dk
(4.19.)
h). Los valores de C1°,C2°, X1°, X2°,X3°...Xm° se remplazan por los valores de C1, C2, X1, X2,
X3...Xm, al cual ocurre el valor mínimo de Jmin.
i). Los valores de d 0 y g 0 se remplazan por los valores de d k +1 y g k +1 cuando ocurre Jmin.
j). Los pasos de b) a i) se repiten hasta encontrar los valores óptimos de los capacitores y los
intervalos de conmutación que minimizan al máximo la función costo J.
k). Los pasos de a) a j) se repiten para diferentes números de intervalos de conmutación y
diferentes valores de capacitores.
l). El valor de “m” para “Jmin”representa el número de intervalos de conmutación y los
valores de de C1 y C2 que se usaran para el diseño del circuito.
Un circuito ideal se tendría cuando la función costo “J” es cero y en este caso los
coeficientes An y Bn son iguales a los coeficientes Xn y Yn de las armónicas que se quieren
eliminar. En este caso ideal el circuito de capacitores conmutados cancelaría todas las
armónicas para las cuales fue sintonizado. En la Figura 4.4 se presenta el diagrama de flujo en
el cual se muestra el procedimiento completo para la evaluación de los capacitores y el patrón
de conmutación.
49
INICIO
Establecer:
m
1
Leer valores iniciales:
C1°,C 2°, X1°, X 2°,X 3°...X m°
Leer Xn y Yn, (n=5, 7, 11, 13, …)
Calcular An y Bn de las ecuaciones
(5.16) y (5.17)
Calcular la función Costo “J” de la
ecuacion (5.19)
Calcular el vector gradiente
ecuación (5.21)
g de la
Establecer:
dk = gk
2
Establecer:
β = β min
Establecer:
o
C1 = C 1 + βd 0
o
C 2 = C 2 + βd 0
o
x1 = x1 + βd 0
.
xm = xmo + βd 0
Calcular An y Bn de las ecuaciones
(5.16)y (5.17)
β = β + ∆β
Calcular la función Costo “J” de la
ecuacion (5.19)
SI
β = β min
NO
NO
J = J min
SI
A
Figura 4.4: Diagrama de flujo para evaluar el valor de los capacitores y el patrón de
conmutación utilizando el método de gradientes conjugados.
50
A
2
T
d k +1 = − g k +1 +
k = k +1
SI
g k +1 g k +1
dk
T
gk gk
K=1
NO
NO
k +1
J k = J min
SI
k
J m = J min
Almacenar:
1
m
1
m
2
C , C , X 1m , X 2m , ......., X mm , J m
NO
m=m+1
m=mfinal
SI
Hallar el valor de m al cual ocurre el mínimo valor
de J m y establecer m a este valor
Escribir:
C1m , C 2m , X 1m , X 2m , ......, X mm , J m
END
Figura 4.4: Continúa.
51
El programa se corrió para diferentes ángulos de disparo de funcionamiento del
convertidor y con ello se obtuvieron diferentes conjuntos de datos los cuales se muestran
más adelante. Cabe mencionar que a medida que se varía el ángulo de disparo del convertidor
se modifica el contenido armónico generado por este, como lo demuestran las ecuaciones
siguientes:
La corriente de línea se puede expresar como:
i L (t ) = I 1 cos α cos ω t +
∞
I1
sin (nπ ) cos(nω t )
n = 5, 7 ,11,13,.. n
∑
(4.20.)
Donde α es el ángulo de disparo del convertidor.
El primer término en la ecuación (4.20) es la componente fundamental de la corriente de
línea. Los otros términos son las componentes armónicas ih . En general la expansión de la
serie de Fourier de las componentes armónicas se puede escribir de la siguiente manera.
ih =
∞
∑ (X
n =5, 7 ,11,13,..
n
sen nω t + Yn cos nω t )
(4.21.)
Las ecuaciones para determinar el valor de las componentes Xn y Yn de la
(4.21) se muestran a continuación en la tabla 4.1.
ecuación
Tabla 4.1 Ecuaciones de las componentes armónicas.
Componente Xn
18Vp
X 1 = − 2 cos (α )sen (α )
π R
18Vp
X5 =
cos(α )sen (5α )
5π 2 R
18Vp
X7 =
cos(α )sen (7α )
7π 2 R
18Vp
X 11 = −
cos(α )sen (11α )
11π 2 R
18Vp
X 13 = −
cos(α )sen (13α )
13π 2 R
Componente Yn
18Vp
Y1 = − 2 cos 2 (α )
π R
18Vp
Y5 = − 2 cos(α ) cos (5α )
5π R
18Vp
Y7 = − 2 cos(α ) cos (7α )
7π R
18Vp
Y11 =
cos(α ) cos (11α )
11π 2 R
18Vp
Y13 =
cos(α ) cos (13α )
13π 2 R
En las ecuaciones de la tabla 4.1, Vp, es el voltaje pico de fase y R, es la resistencia de
carga del convertidor.
Los valores de Xn y Yn en la ecuación anterior se usan en el análisis para determinar el
patrón de conmutación y el tamaño de los capacitores para un rango del ángulo de disparo α.
El valor promedio de los capacitores (C1 y C2) son los utilizados en la implementación del
52
circuito. En la figura 4.5 se presenta un diagrama de flujo en el cual se observa la secuencia
para realizar el procedimiento antes mencionado.
Start
α =α
min
Evaluar C 1, C 2 , X1 , X2 , ...X m
Almacenar
C1α y C2α
Incrementar α
Si
No
α =α
max
Si
C1 prom =
C2 prom =
α =α max
∑ C α / No.angulos dedisparo
α =α min
1
α =α max
∑ C α / No.angulos dedisparo
α =α min
2
Establecer:
C1 = C1 prom
C2 = C2 prom
α =α
min
Evaluar y almacenar el patrón de conmutación:
X1, X 2, ...X m
Incrementar α
No
Si
α =α
max
Si
End
Figura 4.5 Diagrama de flujo para obtener el patrón de conmutación y
el valor de los capacitores.
El programa se corrió para diferentes ángulos de disparo del convertidor y el valor
promedio que se obtuvo de los capacitores fue para C1= 18 µF y para C2= 10 µF. Los
resultados que se obtuvieron con esta estrategia se muestran en el capítulo de pruebas y
resultados.
53
En la Figura 4.6 se muestran las formas de onda de la corriente línea obtenidas con un
patrón de conmutación optimizado, trabajando el convertidor con un ángulo de disparo α=0°.
(a)
(b)
54
(c)
(d)
Figura 4.6 Resultados experimentales con C1 = 18 µF y C2 = 10
µF (a) Corriente de entrada no compensada (b) Espectro de la
corriente de entrada sin compensación (c) Corriente de entrada
compensada. (d) Espectro de la corriente compensada.
55
Capítulo 5
Pruebas y resultados.
5.1
Introducción:
En este capítulo se presentan los resultados experimentales y de simulación que se
obtuvieron al aplicar la técnica de capacitores conmutados mediante las dos estrategias
que se presentan en este trabajo de investigación. Todas las pruebas fueron desarrolladas
con un prototipo de laboratorio conectado a un convertidor trifásico controlado con carga
altamente inductiva.
En primer lugar se muestran los resultados obtenidos con la primera estrategia en la
cual la conmutación de los capacitores sigue un patrón de conmutación PWM y
posteriormente los de la segunda estrategia, en donde la conmutación de los capacitores sigue
un patrón de conmutación obtenido mediante un programa de optimización utilizando el
método de gradientes conjugados.
Con el propósito de comprobar y verificar la efectividad del funcionamiento de la técnica
de capacitores conmutados se construyó un prototipo experimental con las siguientes
especificaciones técnicas.
Puente rectificador de onda completa de 6 pulsos, controlado.
Tensión de entrada 220 V, trifásica.
Potencia de salida: 1.7 KVA
Filtro de capacitores conmutados para manejar una corriente de 5 Amperes.
Para conmutar los capacitores de las tres fases del convertidor durante el intervalo
correspondiente se utilizó el microcontrolador 8031. Los interruptores bidireccionales se
implementaron con un MOSFET de 5A, 500V. El circuito de capacitores conmutados fue
diseñado para manejar una corriente de 4 A y para filtrar la 5a, 7a, 11a, 13a armónicas. En la
figura 5.1, se muestra en detalle el circuito de control de una de las fases del convertidor.
56
IL
IR Al convertidor
Va
Isc
8 mH
17.5 µF
8 µF
S
G
Driver
20 Ω
S
G
D
Driver
S
G
D
D
Driver
Microcontrolador
8031
Figura 5.1. Circuito de control para los capacitores conmutados
5.2
Resultados obtenidos aplicando un patrón de conmutación PWM.
Para ésta primera estrategia, como se menciono en el capítulo anterior, la conmutación de
los capacitores sigue una patrón de conmutación PWM, las corrientes armónicas son
evaluadas utilizando el método de Rung G. Kutta y los parámetros del circuito y el patrón de
conmutación son seleccionados aleatoriamente mediante procesos iterativos, tomando como
referencia el factor de distorsión.
Después de haber ejecutado el programa en repetidas ocasiones se encontró que los
mejores valores de los parámetros del patrón de conmutación y del circuito que
compensaron más eficientemente el contenido armónico de la corriente de línea fueron:
Después de que se corrió el programa en repetidas ocasiones se encontró que los
mejores valores de los parámetros del circuito y del patrón de conmutación que compensaron
más eficientemente el contenido armónico de la corriente de línea fueron los siguientes:
C1=17.5 µF, C2= 8 µF, L=8 mH, N=3, M=0.7 y Fs=2. Con estos datos se implementó el
circuito de capacitores conmutados, se puso en funcionamiento y se analizaron los resultados
para diferentes ángulos de disparo del convertidor.
A continuación se muestran los resultados experimentales y de simulación obtenidos con
este prototipo. En ellos se observa el comportamiento del factor de distorsión, factor de
57
desplazamiento y factor de potencia del puente rectificador controlado al aplicar la técnica de
capacitores conmutados (CC). También se observa la variación de la magnitud de las
componentes armónicas y la corriente a través del filtro. La variación de la magnitud de las
armónicas se expresa en porcentaje y el signo menos (-) indica una disminución de la
magnitud, en tanto que el signo (+) indica un incremento de ésta.
a) Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=0°.
En la tabla 5.1 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 0°. La tabla 5.2 muestra
la compensación de las componentes armónicas, y en las figuras 5.2 y 5.3 se presentan los
resultados de la simulación y experimentales respectivamente.
Tabla 5.1. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
para α= 0º.
Sin aplicar CC
0.958
1
0.958
4.83
Aplicando CC
0.967
0.964
0.934
5.02
4.736
Tabla 5.2 Variación de las componentes armónicas en % aplicando la técnica de CC para
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
α= 0º.
% de variación
-53.4%
-76.5%
24.4%
20.5%
10.8%
-0.24%
a)
58
b)
Figura 5.2.: Resultados de la simulación para α =0°: a) Espectro de la
corriente de línea compensada. b) De arriba a bajo: Corriente de
entrada no compensada Ir, Corriente a través del filtro Isc, Corriente
de línea compensada IL y patrón de conmutación PWM.
a)
b)
Figura 5.3. Resultados experimentales para α=0°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
59
b) Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=5°.
La tabla 5.3 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 5°. La tabla 5.4 muestra
la compensación de las componentes armónicas, y en las figuras 5.4 y 5.5 se presentan los
resultados de la simulación y experimentales respectivamente.
Tabla 5.3. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=5º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.996
0.955
4.81
Aplicando CC
0.968
0.982
0.951
5.02 A.
4.667
Tabla 5.4. Variación de las componentes armónicas en % aplicando la técnica de CC para α=5º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
-53%
-76%
24%
20%
10%
-0.24%
a)
60
b)
Figura 5.4.: Resultados de la simulación para α =5°: a) Espectro de la
corriente de línea compensada. b) De arriba a bajo: Corriente de
entrada no compensada Ir, Corriente a través del filtro Isc, Corriente
de línea compensada IL y patrón de conmutación PWM.
a)
b)
Figura 5.5. Resultados experimentales para α=5°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
61
c) Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=10°.
La tabla 5.5 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 10°. La tabla 5.6 muestra
la compensación de las componentes armónicas, y en la figura 5.6 se presentan los resultados
experimentales.
Tabla 5.5. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=10º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.984
0.944
4.759
Aplicando CC
0.966
0.994
0.960
4.741
4.563
Tabla 5.6. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=10º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
-54%
-76%
45%
13%
9%
1.48%
a)
62
b)
Figura 5.6. Resultados experimentales para α=10°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada
d) Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 15°.
La tabla 5.7 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 15°. La tabla 5.8 muestra
la compensación de las componentes armónicas, y en la figura 5.7 se presentan los resultados
experimentales.
Tabla 5.7. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=15º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.965
0.926
4.668
Aplicando CC
0.962
0.999
0.962
4.566
4.429
Tabla 5.8. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=15º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
-51.9%
-67.2%
55.7%
10.5%
8.9%
2.4%
63
a)
b)
Figura 5.7. Resultados experimentales para α=15°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
e). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 20°.
La tabla 5.9 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 20°. La tabla 5.10
muestra la compensación de las componentes armónicas, y en la figura 5.8 se presentan los
resultados experimentales.
Tabla 5.9. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=20º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.939
0.909
4.54
Aplicando CC
0.956
0.998
0.955
4.35
4.279
64
Tabla 5.10. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=20º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
-46.2%
-54.6%
66.14%
6.9%
8.5%
3.4%
a)
b)
Figura 5.8. Resultados experimentales para α=20°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
65
f) Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 25°.
La tabla 5.11 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 25°. La tabla 5.12
muestra la compensación de las componentes armónicas, y en la figuras 5.9 se presentan los
resultados experimentales.
Tabla 5.11. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=25º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.906
0.868
4.38
Aplicando CC
0.949
0.992
0.942
4.114
4.096
Tabla 5.12. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=25º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
-37.9%
-40.5%
76.2%
3.3%
8.3%
4.4%
a)
66
b)
Figura 5.9. Resultados experimentales para α=25°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
g). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 30°.
La tabla 5.13 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 30°. La tabla 5.14
muestra la compensación de las componentes armónicas, y en la figuras 5.10 se presentan los
resultados experimentales.
Tabla 5.13. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=30º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.866
0.833
4.18
Aplicando CC
0.938
0.980
0.92
3.85
3.882
Tabla 5.14. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=30º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
-26.9%
-25.7%
86.0%
-0.25%
8.3%
5.5%
67
a)
b)
Figura 5.10. Resultados experimentales para α=30°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
h). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 35°.
La tabla 5.15 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 35°. La tabla 5.16
muestra la compensación de las componentes armónicas, y en la figuras 5.11 se presentan los
resultados experimentales.
Tabla 5.15. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=35º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.819
0.785
3.95
Aplicando CC
0.923
0.963
0.890
3.56
3.675
68
Tabla 5.16. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=35º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
-13.7%
-10.6%
94.8%
-4.0%
9.3%
6.9%
.
a)
b)
Figura 5.11. Resultados experimentales para α=35°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
i). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 40°.
La tabla 5.17 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 40°. La tabla 5.18
muestra la compensación de las componentes armónicas, y en la figuras 5.12 se presentan los
resultados experimentales.
69
Tabla 5.17. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=40º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.766
0.734
3.70
Aplicando CC
0.902
0.943
0.851
3.26
3.726
Tabla 5.18. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=40º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
1.32%
3.9%
104.0%
-7.39%
9.33%
7.79%
.
a)
b)
Figura 5.12. Resultados experimentales para α=40°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
70
j). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 45°.
La tabla 5.19 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 45°. La tabla 5.20
muestra la compensación de las componentes armónicas, y en la figuras 5.13 se presentan los
resultados experimentales.
Tabla 5.19. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=45º.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.958
0.707
0.677
3.41 A
Aplicando CC
0.872
0.92
0.80
2.97
3.826
Tabla 5.20. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=45º.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
17.9%
20.35
111.63
-11.07
11.01
9.36
.
a)
71
b)
Figura 5.13. Resultados experimentales para α=45°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
k). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α= 50°.
La tabla 5.21 muestra el efecto que se tiene en el factor de distorsión, factor de
desplazamiento, factor de potencia y corriente de línea al aplicar la técnica de capacitores
conmutados funcionando el convertidor con un ángulo de disparo de 50°. La tabla 5.22
muestra la compensación de las componentes armónicas, y en la figuras 5.14 se presentan los
resultados experimentales.
Tabla 5.21. Comportamiento de los factores de distorsión, desplazamiento, potencia y corriente eficaz de línea,
aplicando y sin aplicar la técnica de CC para α=50.
Parámetro
Factor de distorsión
Factor de desplazamiento
Factor de potencia
Corriente eficaz de línea en Amp
Corriente de pico a través del filtro en Amp
Sin aplicar CC
0.95
0.642
0.616
3.10
Aplicando CC
0.827
0.896
0.74
2.67
3.859
Tabla 5.22. Variación de las componentes armónicas en % Aplicando la técnica de CC para α=50.
Armónica
5ª
7ª
11ª
13ª
17ª
19ª
% de variación
35.2%
35.8%
119.4%
-13.7%
12.0%
10.2%
72
a)
b)
Figura 5.14. Resultados experimentales para α=50°: a) Espectro de la
corriente de línea compensada, b) Corriente de entrada compensada.
Con los datos registrados de cada uno de los casos en que se trabajo el convertidor
(diferentes ángulos de disparo ) se obtuvo la grafica que aparece en la figura 5.15, en la cual
se puede apreciar el comportamiento de los tres factores del sistema sin compensación.
En la figura 5.15 se observa como decrece considerablemente el factor de potencia del
sistema a medida que se incrementa el ángulo de disparo. El factor de potencia de un
convertidor controlado es igual al producto del factor de distorsión por el factor de
desplazamiento y en esta figura se muestra como el factor de distorsión se mantiene
constante a diferencia del factor de desplazamiento el cual decrece proporcionalmente a
medida que se incrementa el ángulo de disparo, razón por la cual el factor de potencia se
comporta en forma semejante al factor de desplazamiento.
73
1
1
0.96
0.92
0.88
FDis
0.84
FDez
0.8
FP
0.76
0.72
0.68
0.64
0.6
0.6
0
0
5
10
15
20
25
30
35
40
45
α
Angulo de disparo Alfa
50
50
Figura 5.15. Comportamiento del convertidor sin aplicar la técnica de
capacitores conmutados.
Para comparar el comportamiento del sistema cuando se aplicó la técnica de CC, con los
datos obtenidos en las dos formas en que se opero el convertidor, se trazaron las gráficas en
forma separada de los factores de distorsión, factor de desplazamiento y factor de potencia las
cuales se muestran en las figuras 5.16, 5.17 y 5.18 respectivamente.
En la figura 5.16 se puede apreciar primeramente, como el factor de distorsión se mejora
en un rango del ángulo de disparo de 0° ≤ α ≤ 20°, después de 20 grados, el valor del factor de
distorsión disminuye incrementando el contenido de corrientes armónicas en la línea.
74
1
0.98
0.96
0.94
0.92
0.9
0.88
FDiss
0.86
FDisc 0.84
0.82
0.8
0.78
0.76
0.74
0.72
0.7
sin
con
0
5
10
15
20
25
α
30
35
40
45
50
Figura 5.16. Comportamiento del factor de distorsión del convertidor,
aplicando CC (FDisc) y sin aplicar la técnica (FDiss).
En la figura 5.17 se muestra el comportamiento del factor de desplazamiento del sistema
y se observa como se mejora considerablemente su valor cuando se aplica la técnica de
capacitores conmutados, evitando con ello un gran desfazamiento entre la componente
fundamental de la corriente y la componente fundamental del voltaje de suministro.
1
0.96
0.92
con
0.88
FDezs
FDezc
0.84
0.8
0.76
0.72
0.68
sin
0.64
0.6
0
5
10
15
20
25
α
30
35
40
45
50
Figura 5.17. Comportamiento del factor de desplazamiento del
convertidor, aplicando CC (FDezc) y sin aplicar la técnica (FDezs).
75
Posteriormente en la figura 5.18 se muestra el comportamiento del factor de potencia del
sistema y en ella se observa como se mejora el rendimiento de este. Para un ángulo de
disparo de 0 a 30 grados, el factor de potencia se mantiene por arriba de 0.92, también se
observa que en el rango de 10 a 20 grados se tiene un valor máximo de aproximadamente
0.95. Para ángulos de disparo mayores de 30 grados el factor de potencia empieza a decrecer
pero siempre se mantiene por arriba del valor del factor de potencia del convertidor cuando no
se aplica la técnica de CC.
1
0.96
0.92
0.88
FPs
FPc
0.84
0.8
0.76
con
0.72
0.68
0.64
0.6
sin
0
5
10
15
20
25
α
30
35
40
45
50
Figura 5.18. Comportamiento del factor de potencia del convertidor,
aplicando CC (FPc) y sin aplicar la técnica (FPs).
76
5.3
Resultados obtenidos aplicando un patrón de conmutación óptimo.
En la segunda estrategia, el patrón para la conmutación de los capacitores se obtiene
mediante un programa de optimización utilizando el método de gradientes conjugados. Como
se mencionó anteriormente, se introducen al programa las armónicas que se desean
eliminar, indicando su orden y su magnitud y con estos datos se corre hasta obtener los
intervalos de conmutación óptimos así como los valores de los capacitores. El programa se
corrió para diferentes ángulos de disparo, iniciando desde α=0, α=5, α=10 hasta α=50. A
continuación se muestran los resultados obtenidos con esta estrategia.
77
a). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=0°.
La tabla 5.23 muestra la magnitud de las componentes par e impar de las armónicas que
se desean eliminar cuando el convertidor funciona con un ángulo de disparo α=0°. En la tabla
5.24 se muestran los intervalos de conmutación obtenidos con el programa de computadora y
en la figura 5.19 se muestran los resultados experimentales del espectro y la forma de onda
de la corriente de línea obtenidos.
Tabla 5.23. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=0°.
Armónica Componente Xn Componente Yn Magnitud
5ª
0
-1.31
1.31
7ª
0
-0.936
0.936
11ª
0
0.595
0.595
13ª
0
0.504
0.504
Tabla 5.24. Patrón de conmutación obtenido para α=0°.
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
0.371 1.179 1.57 1.962 2.75 3.132 3.533 4.32 4.712 5.103 5.891
a)
b)
Figura 5.19. Resultados experimentales para α=0º: a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
78
b). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=5°.
La tabla 5.25 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=5°. En la tabla 5.26 se muestra el
patrón de conmutación obtenido con el programa y en la figura 5.20 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.25. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=5°.
Armónica Componente Xn Componente Yn Magnitud
5ª
0.552
-1.183
1.305
7ª
0.535
-0.764
0.932
11ª
-0.486
0.34
0.593
13ª
-0.455
0.212
0.502
Tabla 5.26. Patrón de conmutación obtenido para α=5°.
X1
X2
X3
X4
X5
X6
0.401 1.169 1.570 1.972 2.74 3.13
X7
X8
X9
3.529 4.311 4.71
X10
X11
5.113 5.88
a)
b)
Figura 5.20. Resultados experimentales para α=5º: a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
79
c). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=10°.
La tabla 5.27 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=10°. En la tabla 5.28 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.21 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.27. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=10°.
Armónica Componente Xn Componente Yn Magnitud
5ª
0.988
-0.829
1.29
7ª
0.866
-0.315
0.921
11ª
-0.551
-0.201
0.586
13ª
-0.38
-0.319
0.496
Tabla 5.28. Patrón de conmutación obtenido para α=10°.
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
0.398 1.172 1.569 1.969 2.738 3.152 3.539 4.311 4.712 5.113 5.882
a)
b)
Figura 5.21. Resultados experimentales para α=10º: a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
80
d). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=15°.
La tabla 5.29 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=15°. En la tabla 5.30 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.22 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.29. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=15°.
Armónica Componente Xn Componente Yn Magnitud
5ª
1.222
-0.327
1.265
7ª
0.873
0.234
0.904
11ª
-0.149
-0.556
0.575
13ª
0.126
-0.47
0.487
Tabla 5.30. Patrón de conmutación obtenido para α=15°.
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
0.425 1.145 1.571 1.996 2.743 3.138 3.531 4.314 4.712 5.112 5.858
a)
b)
Figura 5.22. Resultados experimentales para α=15º: a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
81
e). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=20°.
La tabla 5.31 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=20°. En la tabla 5.32 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.23 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.31. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=20°.
Armónica Componente Xn Componente Yn Magnitud
5ª
1.212
0.214
1.231
7ª
0.565
0.674
0.879
11ª
0.36
-0.429
0.56
13ª
0.466
-0.082
0.473
Tabla 5.32. Patrón de conmutación obtenido para α=20°.
X2
X3
X1
0.401 1.171 1.58
X4
X5
X6
X7
X8
X9
X10
X11
1.996 2.716 3.152 3.551 4.312 4.712 5.112 5.883
a)
b)
Figura 5.23. Resultados experimentales para α=20º: a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
82
f). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=25°.
La tabla 5.33 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=25°. En la tabla 5.34 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.24 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.33. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=25°.
Armónica Componente Xn Componente Yn Magnitud
5ª
0.973
0.681
1.187
7ª
0.074
0.845
0.848
11ª
0.538
0.047
0.54
13ª
0.262
0.374
0.457
Tabla 5.34. Patrón de conmutación obtenido para α=25°.
X1
0.41
X2
X3
X4
X5
1.169 1.573 1.977 2.74
X6
X7
X8
X9
X10
X11
3.135 3.537 4.312 4.712 5.113 5.853
a)
b)
Figura 5.24. Resultados experimentales para α=25º: a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
83
g). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=30°.
La tabla 5.35 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=30°. En la tabla 5.36 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.25 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.35. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=30°.
Armónica Componente Xn Componente Yn Magnitud
5ª
0.567
0.983
1.134
7ª
-0.405
0.702
0.81
11ª
0.258
0.447
0.516
13ª
-0.218
0.378
0.436
Tabla 5.36. Patrón de conmutación obtenido para α=30°.
X1
0.38
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
1.184 1.612 1.957 2.755 3.126 3.525 4.325 4.712 5.098 5.896
a)
b)
Figura 5.25. Resultados experimentales para α=30° a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
84
h). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=35°.
La tabla 5.37 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=35°. En la tabla 5.38 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.26 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.37. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=35°.
Armónica Componente Xn Componente Yn Magnitud
5ª
0.094
1.069
1.073
7ª
-0.695
0.324
0.766
11ª
-0.206
0.442
0.488
13ª
-0.411
-0.036
0.413
Tabla 5.38. Patrón de conmutación obtenido para α=35°.
X2
X3
X4
X1
0.398 1.171 1.573 1.97
X5
X6
X7
X8
X9
X10
X11
2.741 3.119 3.541 4.312 4.712 5.112 5.883
a)
b)
Figura 5.26. Resultados experimentales para α=35°. a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
85
i). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=40°.
La tabla 5.39 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=40°. En la tabla 5.40 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.27 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.39. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=40°.
Armónica Componente Xn Componente Yn Magnitud
5ª
-0.343
0.943
1.004
7ª
-0.706
-0.124
0.717
11ª
-0.449
0.079
0.456
13ª
-0.132
-0.363
0.386
Tabla 5.40. Patrón de conmutación obtenido para α=40°.
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
0.376 1.1.74 1.569 1.967 2.744 3.132 3.538 4.315 4.742 5.109 5.798
a)
b)
Figura 5.27. Resultados experimentales para α=40° a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
86
j). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=45°.
La tabla 5.41 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=45°. En la tabla 5.42 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.28 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.41. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=45°.
Armónica Componente Xn Componente Yn Magnitud
5ª
-0.655
0.655
0.926
7ª
-0.468
-0.468
0.662
11ª
-0.298
-0.298
0.421
13ª
0.252
-0.252
0.356
Tabla 5.42 Patrón de conmutación obtenido para α=45°.
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
0.372 1.198 1.556 1.945 2.768 3.163 3.514 4.339 4.712 5.085 5.910
a)
b)
Figura 5.28. Resultados experimentales para α=45°. a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
87
k). Resultados obtenidos funcionando el convertidor con un ángulo de disparo α=50°.
La tabla 5.43 muestra la magnitud de las componentes armónicas que se desean eliminar
cuando el convertidor funciona con un ángulo de disparo α=50°. En la tabla 5.44 se muestra
el patrón de conmutación obtenido con el programa y en la figura 5.29 se muestran los
resultados experimentales del espectro y la forma de onda de la corriente de línea obtenidos.
Tabla 5.43. Magnitud de las armónicas que se desean eliminar y que se introducen al programa para α=50°.
Armónica Componente Xn Componente Yn Magnitud
5ª
-0.791
0.288
0.842
7ª
-0.104
-0.592
0.601
11ª
0.066
-0.377
0.383
13ª
0.304
0.111
0.324
Tabla 5.44. Patrón de conmutación obtenido para α=50°.
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
0.415 1.155 1.567 1.986 2.726 3.201 3.556 4.297 4.721 5.127 5.867
a)
b)
Figura 5.29. Resultados experimentales para α=50°. a) Espectro de la
corriente de línea compensada, b) Forma de onda de la Corriente de
línea compensada.
88
De las gráficas obtenidas con esta segunda estrategia se puede observar como se mejora
la forma de onda de la corriente de línea compensada cuando el convertidor trabaja con un
ángulo de disparo de 0 < α ≤ 25°, para ángulos de disparo mayores se empieza a incrementar
la 11ª armónica, haciendo que el factor de distorsión disminuya y con ello se empieza a
deformar la forma de onda de la corriente de línea.
Los resultados experimentales y de simulación reflejan como se mejora el
comportamiento del convertidor con ambas estrategias. Sin embargo, se considera más
eficiente la segunda debido a que se optimiza el patrón de conmutación y además se
reduce el tiempo de cálculo para encontrar los parámetros del circuito.
La tabla 5.45 presenta un resumen comparativo de las gráficas obtenidas mediante las
dos estrategias presentadas en este trabajo. En esta tabla se puede apreciar que con ambas
estrategias se mejora la forma de onda de la corriente de línea y en consecuencia la
compensación del contenido armónico, aunque cuando se aplica el patrón de conmutación
óptimo la forma de onda de la corriente de línea se mantiene menos distorsionada a medida
que se incrementa el ángulo de disparo del convertidor en un rango más amplio.
Tabla 5.45
Comparación de las formas de onda de la corriente de línea
compensada obtenidas mediante las dos estrategias; primeramente aplicando un
patrón de conmutación PWM y posteriormente aplicando un patrón de conmutación
óptimo.
Angulo de
disparo α
Patrón de conmutación PWM
Figura
Gráfica
Patrón de Conmutación óptimo
Figura
Gráfica
0º
5.3
5.19
5º
5.5
5.20
10º
5.6
5.21
15º
5.7
5.22
89
20º
5.8
5.23
25º
5.9
5.24
30º
5.10
5.25
35º
5.11
5.26
40º
5.12
5.27
45º
5.13
5.28
50º
5.14
5.29
90
Capítulo
6
Conclusiones
6.1
Introducción
En este trabajo se presentó un estudio de los problemas asociados con la generación
de corrientes armónicas inyectadas a la línea por cargas no lineales y de diferentes
métodos para su reducción en convertidores trifásicos controlados.
Dos de las técnicas más populares utilizadas en los sistemas industriales de potencia para
la reducción de corrientes armónicas son la instalación de convertidores multifase y la de
filtros pasivos. Sin embargo, algunos problemas asociados con estos métodos han
demostrado la necesidad de investigar nuevas alternativas para solucionar este problema;
una de estas alternativas son los filtros con capacitores conmutados. La tendencia actual es a
convertidores multipulso (en alta potencia), filtros pasivos y filtros activos, sin embargo los
filtros activos no han proliferado mucho debido a que presentan costos altos para su
aplicación masiva en la solución de la reducción de corrientes armónicas y compensación del
factor de potencia, además de que no son universales para cualquier tipo de aplicación, es
necesario sintonizarlos para una aplicación particular.
En esta tesis se investigó un nuevo método para la reducción de corrientes armónicas
usando la técnica de capacitores conmutados. Para poder apreciar la importancia de este
método se decidió discutir la naturaleza de las corrientes armónicas, los problemas
generados por estas. Los dos primeros capítulos son entonces una revisión de los métodos
existentes para la reducción de estas corrientes. En los siguientes capítulos se trató de la
descripción y el análisis de la técnica, así como las pruebas y resultados experimentales
obtenidos para comprobar las predicciones teóricas de esta técnica.
Es importante resaltar que la optimización de la operación del filtro basado en capacitores
conmutados permite reducir un mayor número de componentes armónicas, incrementándose el
número de pulsos del patrón de conmutación de los interruptores del filtro. Esto redunda en
una operación muy eficiente del filtro de CC si se compara con otros métodos para la
reducción de corrientes armónicas.
6.2 Resultados
Se demostró que la técnica de capacitores conmutados se puede utilizar para construir
filtros cuyas características se determinan a partir de los valores de los parámetros del
circuito, tales como la inductancia L, el valor de los capacitores C1 y C2 y el patrón de
conmutación de los dispositivos semiconductores. El uso de un control por microprocesador
permite al usuario variar el patrón de conmutación previamente almacenado en una memoria
91
EPROM por medio de software, de tal forma que se puedan eliminar un gran número de
componentes armónicas.
Las principales ventajas de la técnica de CC se resumen como sigue:
La técnica de optimización permite eliminar armónicas, con pérdidas mínimas en la
etapa de potencia del sistema de filtrado.
No se requiere una fuente de energía auxiliar.
Existe la capacidad de reducir un amplio número de armónicas usando un solo filtro.
Se puede aplicar a diferentes sistemas debido a su flexibilidad por medio de
software.
Sin embargo esta técnica tiene ciertas desventajas.
El circuito de capacitores conmutados genera grandes di dt y dv dt de los cuales
los dispositivos semiconductores se deben proteger.
La variación de la corriente con respecto al tiempo ( di dt ) en los interruptores es un
parámetro crítico, el cual depende de la diferencia entre el voltaje de suministro y el
voltaje a través del capacitor en el instante de conmutación; puede ser muy alto si
el voltaje en el capacitor es bajo.
La variación del voltaje ( dv dt ) a través de los interruptores es otro parámetro
crítico, el cual depende de la cantidad de corriente que fluye a través de los
interruptores en el instante en que se abren y este puede ser muy alto.
El problema del dv dt se soluciona incorporando redes amortiguadoras apropiadas,
mientras que el di dt se reduce introduciendo una zona muerta de modo que la corriente en
la inductancia del circuito no se interrumpa.
6.3
Comparación con otras técnicas.
En la tabla 6.1 se muestran la comparación de tres técnicas para la reducción de corrientes
armónicas: filtros pasivos convencionales, filtros activos [10] y la de capacitores conmutados.
Esta tabla muestra las magnitudes normalizadas de las corrientes armónicas generadas por un
convertidor trifásico controlado de 6 pulsos trabajando con un ángulo de disparo α=0.
En esta tabla se puede observar que los mejores resultados se obtienen cuando se emplean
filtros activos; sin embargo, es importante recalcar que esta mejoría se obtiene a costa de una
frecuencia de conmutación más alta.
La frecuencia de conmutación máxima en el filtro activo es de 20 kHz. Esto contrasta con
los 360 Hz a los que opera el filtro de capacitores conmutados. En ambos casos se tiene
conmutación dura por lo que se tienen pérdidas más elevadas en el filtro activo. Además, la
arquitectura del control en un filtro activo es compleja, elevando su costo.
92
Por otro lado, los filtros pasivos resultan ser una solución más económica que la de
los filtros activos, aunque su eficiencia en cuanto a la compensación de armónicos es menor,
sin embargo el comportamiento de los filtros pasivos se ve afectado por la impedancia de la
fuente, la cual cambia al variar la topología de la red, además de que pueden presentar
condiciones indeseables de resonancia, situación que no se presenta en un filtro de capacitores
conmutados.
Tabla 6.1. Comparación de tres técnicas para la compensación de corrientes armónicas.
6.4
Armónica
Filtro
pasivo (%)
Filtro
activo (%)
5
7
11
13
15
5.49
3.19
3.99
3.14
2.23
0.64
0.72
Filtro de
capacitores
conmutados (%)
7.24
2.89
5.07
2.88
Aplicaciones.
El principio establecido en este trabajo, se puede aplicar a convertidores con potencias
de salida en el rango de decenas a cientos de kilowatts tales como; controles industriales
de velocidad de motores de corriente continua, hornos por arco eléctrico, en los cuales el
nivel de corrientes armónicas, y algunas veces el orden puede variar y puede requerir de un
método de control de armónicas rápido, flexible y efectivo.
Debido a los avances recientes en el diseño de dispositivos semiconductores de
potencia, permiten la realización de circuitos prácticos confiables por lo que el filtro de CC
puede diseñarse para aplicaciones de baja y mediana potencia.
Finalmente la técnica de capacitores conmutados se puede aplicar a cualquier tipo de
sistema en el cual existe una considerable distorsión de la corriente de línea.
6.4
Trabajos futuros.
Como continuación del trabajo de investigación desarrollado en esta tesis se propone el
siguiente trabajo futuro.
Implementar un control en lazo cerrado para cargas no lineales en las cuales se generan
corrientes armónicas de diferente orden y magnitud como es el caso de los hornos por arco
eléctrico la cual podría ser un área interesante. Debido a la naturaleza del arco eléctrico y del
proceso de fusión, estos dispositivos generan armónicos en un espectro de intensidad muy
aleatorio. En este caso las corrientes armónicas en la línea deben de sensarse de modo que su
orden y magnitud puedan ser medidas. Esto se podría realizar usando un transformador de
93
corriente y un filtro. La armónica detectada podría ser alimentada a un convertidor A/D
cuya salida alimentaría a un microprocesador. Este podría calcular el instante de tiempo
donde cada interruptor del circuito de CC se debería encender o apagar de acuerdo a un
patrón de conmutación óptimo. Ambos, el convertidor A/D y microprocesador deben tener
una respuesta rápida y precisa para minimizar el tiempo de repuesta del sistema y optimizar
la reducción de las corrientes armónicas.
La figura 6.1 muestra un diagrama de bloques para este sistema.
Carga no lineal
Fuente de CA
Filtro de capacitores
Filtro para la
fundamental
Convertidor A/D
conmutados
Driver
Microprocesador
Figura 6.1 Diagrama a bloques para el sistema propuesto.
94
Bibliografía
[1]
Steeper and R. P. Stratford "Reactive Compensation and Harmonics Suppression for
Industrial Power Systems Using Thyristor Converters" IEEE Transactions on industry
applications, Vol IA, No. 3, May/Jun 176.
[2]
Ray P. Stratford "Analysis and Control of Harmonic Current in Systems with Static power
Converters", IEEE Transactions on industry applications. Vol. IA-17. No. 1,
January/February 1981.
[3]
Robert L. Smith "Applications Considerations in Handling Effects of SCR Generated
Harmonics in Cement Plants" IEEE Transactions on industry applications, Vol. IA-17, No.
1, January/February 1981.
[4]
Guide for harmonic control and reactive compensation of static power converter, IEEEIAS.
[5]
Sasaki, H., and Machida, T. "A New Method to Eliminate a.c. Harmonic Currents by
Magnetic Flux compensation Consideration on Basic design", IEEE Trans. PAS, Vol. 90
pp. 2009-20199, no. 5, Sept/Oct. 1971.
[6]
Ortmeyer, T.H. "A.C. - D.C. Converter Harmonic Reduction by means of a switched
bucking transformer" IEE, ICPSTC, May/ 1982, pp5-8.
[7]
Baird, J. Arrillga " Harmonic reduction in d.c. ripple reinjection" IEEE PROC., Vol 127,
Pt. C, No. % September 1980.
[8]
Bird B. M., March, J.F. and McClellan P.R. "Harmonic Reduction in Multiplex converter
by Triple-frequency Current Injection", Proc. IEE, 1969, 116, (10), pp 1730-1734.
[9]
C. Núñez “Estrategias de control no lineal aplicadas a filtros activos de potencia” Tesis
Doctoral. Centro Nacional de Investigación y Desarrollo Tecnológico, CENIDET.
[10]
V. Cárdenas “Filtros activos híbridos para compensación armónica de corriente y
corrección de factor de potencia en sistemas trifásicos” Tesis Doctoral, Centro Nacional
de Investigación y Desarrollo Tecnológico, CENIDET.
[11]
C. V. Hernández, “Filtro activo de corriente monofásico con salida en tensión controlado
mediante un procesador digital de señales” Tesis de Maestría, Centro Nacional de
Investigación y Desarrollo Tecnológico CENIDET.
95
[12]
L. Cortes, “Filtros activos de corriente monofásicos empleando convertidores regulados
en corriente y control en el dominio del tiempo”, Tesis de maestría, Centro Nacional de
Investigación y Desarrollo Tecnológico CENIDET.
[13]
Jimenez G. "Harmonic Reduction in a Three-phase rectifier system using the switchedcapacitor technique" MPhill Thesis, Brunel University, 1987.
[14]
Pratap Mehta, Mohamed Darwish, T. Thomson "Switched- Capacitor Filters" IEEE
Transactions on Power electronics, Vol, 5 No. 3, July 1990.
[15]
W. Shepherd and L. N. Hulley “Power electronic and motor control”.
[16]
Harry Frank and Bo Landstrom "Power-factor correction with thyristor-controlled
capacitors" Asea Journal 1971 VOL. 44 Number 6.
[17]
Teruo Kataoka, Kazuhiro Mizumachi and Shota Miyariri "A Pulse-width Controlled AC
to DC Converter to Improve Power Factor and Waveform of AC Line Currents"
[18]
Kunio Tsuboi, Fumio Harashima, Hiroshi Inaba "Reduction of Reactive Power and
Balancing of Supply Currents for Three-Phase Converter Systems"
[19]
L. Gyugyi, R. A. Otto, T. H Putman "Principles and Applications of Static Thyristor
controlled shunt Compensators" IEE Transactions PAS Vol. PAS-97, No 5 Sept/Oct 1978.
[20]
A. E. Hammad, R. M. Mathur "New Generalized Concept For the Design of Thyristor
Phase-Controlled Var's Compensator Part I: steady State Performance" IEEE Transactions
PAS, Vol PAS-98, No.1 Jan/Feb 1979.
[21]
E. Hammad, R. M. Mathur "New Generalized Concept For the Design of Thyristor PhaseControlled Var's Compensator Part II: Steady State Performance" IEEE Transactions PAS,
Vol PAS-98, No.1 Jan/Feb 1979.
96
Apéndice A1
Listado del Programa para obtener el patrón de conmutación
PWM mediante el método de Newton Raphson, análisis del
circuito de capacitores conmutados mediante el método de
Runge Kuta y Graficación de formas de onda de corriente de
línea, corriente al rectificador, corriente del filtro y patrón de
conmutación
Program Pcompleto;
{Programa para Determinar la Potencia de un controlador}
Uses Crt,Dos,printer, graph; {Controlado empezando ti = à.}
Var
p,ESC,ts,ti,tc,w,K11,k12,k13,k14,j11,j12,j13,j14:real;
Vxmax, Iscmax,M,isc,Vx1,Vx2,Ir,IL,t:real;
Cnr,CnL,I1,Io,IA,IB:real;
Vs,t2,E,C,d,f,g,q,o:real;
Pn,i,Gd,Gm,Np,RL:integer;
N,Fs,LL,KK,NM,MM,alf1 :integer;
FF,FF1,Vpico,ALFR,FP,FiIr,FiIL,FDez: real;
Iin,Iil,Vo_Vrms, Pir_ins,Pil_ins,Pot,PotL :real;
di,Potencia_Ap,Potencia_Ir,Potencia_IL: real;
Cont,K, B: integer;
PWMa,PWMb,N1, A, FA, F1A, A1:real;
An1L,Bn1L,An,Bn,An1,Bn1,An11,Bn11,AMP,Z,Vertical:real;
Lopt,C1opt,C2opt,indice: real;
No_pulsos,frec_sw: integer;
DFIr,DF_max,DF,Irms,iLms,Fund_rms:real;
C1,C2,L,Vp: real;
Alfa: array[0..250] of real;
Lamda:array[0..10] of real;
PWM : array[0..200] of real;
ALFAt: array[0..200] of real;
Beta : array[1..1000] of real;
Gama : array[1..1000] of real;
Delta : array[1..1000] of real;
Sigma : array[1..1000] of real;
Vin : array[0..1000] of real;
Vrms : array[0..1000] of real;
PR : array[0..1000] of real;
PL : array[0..1000] of real;
J,Nn,PUNTOS:integer;
Amplitud : array[1..100] of real;
Harm : array[0..100] of real;
{Isc}
{Ir}
{IL}
{Vx}
{Vs}
Const
Re=2;
97
h=83.333e-6;
Procedure fila;
Begin
For i:=1 to 78 do
Begin
write(chr(220));
end;
end;
Procedure fila2;
Begin
For i:=1 to 78 do
Begin
write(chr(205));
end;
end;
Procedure Columna;
Begin
For i:=2 to 24 do
Begin
Gotoxy(2,i);
write(chr(219));
end;
end;
Procedure Columna2;
Begin
For i:=2 to 24 do
Begin
Gotoxy(79,i);
write(chr(219));
end;
end;
Procedure Columna3;
Begin
Gotoxy(66,4);
write(chr(203));
For i:=5 to 23 do
Begin
Gotoxy(66,i);
write(chr(186));
end;
Gotoxy(66,24);
write(chr(202));
98
end;
Procedure Leer;
Begin
Gotoxy(6,6);
Write('Introduce el ngulo de disparo "à": ');
gotoxy(68,6);
Readln(alf1);
Gotoxy(6,7);
Write('Introduce el valor del Capacitor " C1": ');
gotoxy(68,7);
Readln(C1);
Gotoxy(6,8);
Write('Introduce el valor del capacitor " C2": ');
gotoxy(68,8);
Readln(C2);
Gotoxy(6,9);
Write('Introduce el valor de la inductancia " L ": ');
gotoxy(68,9);
Readln(L);
Gotoxy(6,10);
Write('Introduce La resistencia " RL ": ');
gotoxy(68,10);
Readln(RL);
Gotoxy(6,11);
Write('Introduce el Voltaje rms de l¡nea " VLrms ": ');
gotoxy(68,11);
Readln(Vp);
Gotoxy(6,12);
Write('Introduce el Numero de pulsos"N": ');
gotoxy(68,12);
Readln(N);
Gotoxy(6,13);
Write('Introduce el Indice de Mod. "M": ');
gotoxy(68,13);
Readln(M);
Gotoxy(6,14);
Write('Introduce la Frec. de Switc. "Fs": ');
gotoxy(68,14);
Readln(Fs);
Gotoxy(6,15);
Write('Introduce el No de Periodos a muestrear "NP": ');
gotoxy(68,15);
Readln(NP);
Gotoxy(6,16);
Write('Introduce la magnitud del periodo "P": ');
gotoxy(68,16);
99
Readln(P);
Gotoxy(6,17);
Write('Introduce la escala p/ graficar (1-6) "ESC": ');
gotoxy(68,17);
Readln(ESC);
end;
Procedure Encabezado;
Begin
Gotoxy(11,3);
write('PROGRAMA PARA SIMULAR LA TECNICA DE CAPACITORES
CONMUTADOS');
END;
Procedure nuevamente;
Begin
Clrscr;
Gotoxy(2,1);
fila;
Gotoxy(2,4);
fila2;
Gotoxy(2,24);
fila;
Columna;
Columna2;
Columna3;
Textcolor(14);
Encabezado;
LEER;
end;
Procedure Decision;
var
letra: char;
Begin
Textcolor(128);
gotoxy(6,20);
Write('¨Los valores de los parametros son correctos S/N?');
gotoxy(73,20);
readln(letra);
If (letra = chr(115)) or (letra = chr(83)) then
begin
write('Inicio');
end
else
begin
Textcolor(red);
100
Nuevamente;
end;
end;
Procedure Portada;
Begin
Clrscr;
window(1,1,80,24);
Textbackground(3);
Textcolor(red);
Nuevamente;
decision;
Textbackground(Black);
Textcolor(white);
Window(1,1,80,25);
end;
Procedure Evalua_Ir;
Begin
I1:=(18*SQRT(2)*Vp*COS(ALFR))/(SQRT(3)*SQR(PI)*RL);
IA:=I1*(-sin(alfR)*cos(w*t)+(1/5)*sin(5*alfr)*cos(5*w*t)+(1/7)*sin(7*alfr)*cos(7*w*t));
IA:=IA+I1*(-(1/11)*sin(11*alfr)*cos(11*w*t)-(1/13)*sin(13*alfr)*cos(13*w*t));
IA:=IA+I1*( (1/17)*sin(17*alfr)*cos(17*w*t)+(1/19)*sin(19*alfr)*cos(19*w*t));
IA:=IA+I1*(-(1/23)*sin(23*alfr)*cos(23*w*t)-(1/25)*sin(25*alfr)*cos(25*w*t));
IA:=IA+I1*( (1/29)*sin(29*alfr)*cos(29*w*t)+(1/31)*sin(31*alfr)*cos(31*w*t));
IA:=IA+I1*(-(1/35)*sin(35*alfr)*cos(35*w*t)-(1/37)*sin(37*alfr)*cos(37*w*t));
IB:=I1*(cos(alfR)*sin(w*t)-(1/5)*cos(5*alfr)*sin(5*w*t)-(1/7)*cos(7*alfr)*sin(7*w*t));
IB:=IB+I1*( (1/11)*cos(11*alfr)*sin(11*w*t)+(1/13)*cos(13*alfr)*sin(13*w*t));
IB:=IB+I1*(-(1/17)*cos(17*alfr)*sin(17*w*t)-(1/19)*cos(19*alfr)*sin(19*w*t));
IB:=IB+I1*( (1/23)*cos(23*alfr)*sin(23*w*t)+(1/25)*cos(25*alfr)*sin(25*w*t));
IB:=IB+I1*(-(1/29)*cos(29*alfr)*sin(29*w*t)-(1/31)*cos(31*alfr)*sin(31*w*t));
IB:=IB+I1*( (1/35)*cos(35*alfr)*sin(35*w*t)+(1/37)*cos(37*alfr)*sin(37*w*t));
Ir:=IA+IB;
end;
Procedure Runge_isc1;
BEGIN
WHILE t < t2 DO
Begin
k11:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*t)-(Vx1+Re*isc)); {A}
j11:=(h/C)*isc;
{E}
k12:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*(t+0.5*h))-(Vx1+0.5*j11+Re*(isc+0.5*k11)));
{B}
j12:=(h/C)*(isc+0.5*k11);
{F}
k13:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*(t+0.5*h))-(Vx1+0.5*j12 + Re*(isc+0.5*k12)));
{Z}
101
j13:=(h/C)*(isc+0.5*k12);
{G}
k14:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*(t+h))-(Vx1+j13 + Re*(isc+k13)));
j14:=(h/C)*(isc+k13);
{S}
isc:= isc + 1/6*(k11+2*k12+2*k13+k14);
Vx1:= Vx1 + 1/6 * (j11+2*j12+2*j13+j14);
t:=t+h;
EVALUA_Ir;
IL:=isc+Ir;
Vpico:=SQRT(2)*Vp*sin(w*t);
Pot:=Ir*Vpico;
PotL:=IL*Vpico;
IF Pn >= (Np-1) THEN
Begin
Vs:=sqrt(2/3)*Vp*sin(w*ts);
Beta[j]:=isc;
Gama[j]:=Ir;
Delta[j]:=IL;
Sigma[j]:=Vx1;
Vin[j]:=Vs;
Vrms[j]:=Vpico;
PR[j]:=Pot;
PL[j]:=PotL;
IF abs(Vxmax) < abs(Vx1) then
Vxmax:=VX1;
{D}
IF abs(Iscmax) < abs(Isc) then
Iscmax:=Isc;
PUNTOS:=j;
j:=j+1;
ts:=ts+h;
end;
tc:=tc+h;
Writeln('Isc=',isc:8:5,' ','Vx=',Vx1:8:5,' ','t=',t:8:7,' ','tc=',tc:8:7);
end;
end;
Procedure Runge_isc2;
BEGIN
WHILE t < t2 DO
Begin
k11:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*t)-(Vx2 + Re*isc)); {A}
j11:=(h/C)*isc;
{E}
k12:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*(t+0.5*h))-(Vx2+0.5*j11 + Re*(isc+0.5*k11)));
{B}
j12:=(h/C)*(isc+0.5*k11);
{F}
102
k13:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*(t+0.5*h))-(Vx2+0.5*j12 + Re*(isc+0.5*k12)));
{Z}
j13:=(h/C)*(isc+0.5*k12);
{G}
k14:=(h/L)*((sqrt(2)/sqrt(3))*Vp*SIN(w*(t+h))-(Vx2+j13 + Re*(isc+k13)));
{D}
j14:=(h/C)*(isc+k13);
{S}
isc:= isc + (1/6)*(k11+2*k12+2*k13+k14);
Vx2:= Vx2 + (1/6)*(j11+2*j12+2*j13+j14);
t:=t+h;
EVALUA_Ir;
IL:=isc+Ir;
Vpico:=SQRT(2)*Vp*sin(w*t);
Pot:=Ir*Vpico;
PotL:=IL*Vpico;
IF Pn>= (Np-1) THEN
Begin
Vs:=sqrt(2/3)*Vp*sin(w*ts);
Beta[j]:=isc;
Gama[j]:=Ir;
Delta[j]:=IL;
Sigma[j]:=Vx2;
Vin[j]:=Vs;
Vrms[j]:=Vpico;
PR[j]:=Pot;
PL[j]:=PotL;
IF abs(Vxmax) < abs(Vx1) then
Vxmax:=VX1;
IF abs(Iscmax) < abs(Isc) then
Iscmax:=Isc;
puntos:=j;
ts:=ts+h;
j:=j+1;
end;
tc:=tc+h;
Writeln('Isc=',isc:8:5,' ','Vx=',Vx2:8:5,' ','t=',t:8:7,' ','tc=',tc:8:7);
end;
end;
Procedure Runge_isc;
Begin
tc:=0;
ts:=0;
isc:=0;
Ir:=0;
IL:=0;
IA:=0;
103
IB:=0;
Vx1:=0;
Vx2:=0;
Vxmax:=0;
Iscmax:=0;
ALFR:=alf1*pi/180;
w:=(2*pi)/p;
ti:=(Alf1*p/360);
j:=1;
FOR Pn:=1 to NP do
BEGIN
t:=ti;
K:=0;
WHILE t <= (P+ti) DO
BEGIN
Writeln('CORRIENTE CON C=C1');
writeln;
k:=k+1;
t2:=alfat[k];
C:=C1;
Runge_isc1;
Writeln;
Writeln('CORRIENTE CON C=C2');
writeln;
K:=K+1;
t2:=alfat[k];
C:=C2;
Runge_isc2;
writeln;
end;
writeln;
end;
end;
Procedure PowerIr;
Begin
Pir_ins:=0;
For j:=1 to round(puntos/2) do
Begin
Pir_ins:=Pir_ins + h*PR[j];
end;
Pir_ins:=(sqrt(3)*Pir_ins)/((p+ti)-ti);
WRITELN;
writeln('POTENCIA REAL CON LA INTEGRAL = ',Pir_ins:8:4,' ','Watts');
end;
104
Procedure PowerIL;
Begin
Pil_ins:=0;
For j:=1 to round(puntos/2) do
Begin
Pil_ins:=Pil_ins + h*PL[j];
end;
Pil_ins:=(sqrt(3)*Pil_ins)/((p+ti)-ti);
WRITELN;
writeln('POTENCIA REAL CON LA INTEGRAL = ',Pil_ins:8:4,' ','Watts');
end;
Procedure Voltaje_Vrms;
Begin
Vo_Vrms:=0;
For j:=1 to round(puntos/2) do
Begin
Vo_Vrms:=Vo_Vrms + h*Vrms[j]*Vrms[j];
end;
Vo_Vrms:=sqrt((1/p)*Vo_Vrms);
writeln('Voltaje EFICAZ = ',Vo_Vrms:8:4,' ','Volts');
end;
Procedure Corriente_rms;
Begin
Iin:=0;
For j:=1 to round(puntos/2) do
Begin
Iin:=Iin + h*Gama[j]*Gama[j];
end;
Iin:=sqrt((1/p)*Iin);
writeln('Corriente EFICAZ = ',Iin:8:4,' ','Amp');
end;
Procedure Corriente_lms;
Begin
Iil:=0;
For j:=1 to round(puntos/2) do
Begin
Iil:=Iil + h*Delta[j]*Delta[j];
end;
Iil:=sqrt((1/p)*Iil);
WRITELN;
writeln('Corriente EFICAZ = ',Iil:8:4,' ','Amp');
end;
105
Procedure Cofis;
Begin
An:=0;
Bn:=0;
For j:=1 to round(PUNTOS/2) do
Begin
An:=An + h*Delta[j]*cos(Nn*w*j*h);
Bn:=Bn + h*Delta[j]*sin(Nn*w*j*h);
end;
An1:=(2/P)*An;
Bn1:=(2/P)*Bn;
AMP:=sqrt(An1*An1+Bn1*Bn1);
Amplitud[Nn]:=AMP;
writeln('An',Nn,'=',An1:8:5,' ','Bn',Nn,'=',Bn1:8:5,' ','AMP',Nn,'=',AMP:8:5);
end;
Procedure CofisIR;
Begin
An:=0;
Bn:=0;
For j:=1 to round(PUNTOS/2) do
Begin
An:=An+h*Gama[j]*cos(Nn*w*j*h);
Bn:=Bn+h*Gama[j]*sin(Nn*w*j*h);
end;
An1:=(2/P)*An;
Bn1:=(2/P)*Bn;
AMP:=sqrt(An1*An1+Bn1*Bn1);
Amplitud[Nn]:=AMP;
writeln('An',Nn,'=',An1:8:5,' ','Bn',Nn,'=',Bn1:8:5,' ','AMP',Nn,'=',AMP:8:5);
end;
Procedure CoeficientesIR;
Begin
Nn:=1;
Irms:=0;
WHILE Nn <= 49 do
Begin
CofisIr;
If Nn =1 then
Begin
Fund_rms:=Amplitud[Nn]/sqrt(2);
FiIr := arctan(An1/Bn1)-alfR;
An11:=An1;
Bn11:=Bn1;
Fdez := cos(FiIr);
106
end;
Irms:= Irms + sqr(Amplitud[Nn]/sqrt(2));
Nn:=Nn+4;
CofisIr;
Irms:= Irms + sqr(Amplitud[Nn]/sqrt(2));
Nn:=Nn+2;
end;
DFIr:=(Fund_rms)/(sqrt(Irms));
Potencia_Ir:=sqrt(3)*vp*(I1/sqrt(2))*cos(FiIr);
Potencia_Ap:=sqrt(3)*sqrt(Irms)*Vp;
Io:=(I1*pi)/(2*sqrt(3));
writeln('**** DATOS OBTENIDOS SIN APLICAR LA TECNICA DE CC ****');
writeln;
writeln('íIr = ',FiIr*(180/pi):8:5);
writeln;
writeln('Irms = ',sqrt(Irms):6:4);
writeln;
writeln('Io = ',Io:6:4);
writeln;
writeln('FDez = ',FDez:6:5);
writeln;
writeln('DF = ',DFir:6:5);
writeln;
Writeln('FACTOR DE POTENCIA = ',DFir*cos(FiIr):6:4);
writeln;
writeln('POTENCIA REAL CON FORMULA CONV. = ',Potencia_Ir:8:4);
writeln;
writeln('POTENCIA APARENTE = ',Potencia_Ap:8:4);
writeln;
writeln('An1 = ',An11:6:4,' ','Bn11 = ',Bn11:6:4);
end;
Procedure CoeficientesIL;
Begin
Nn:=1;
ILms:=0;
Fund_rms:=0;
WHILE Nn <=25 do
Begin
Cofis;
if Nn=1 then
Begin
Fund_rms:=Amplitud[Nn]/sqrt(2);
An1L:=An1;
Bn1L:=Bn1;
FiIL:=arcTan(An1/Bn1)-alfr;
FDez:= cos(FiIL);
107
end;
ILms:= ILms + sqr(Amplitud[Nn]/sqrt(2));
Nn:=Nn+1;
end;
DF:=(Fund_rms)/(sqrt(ILms));
Potencia_IL:=3*(vp/sqrt(3))*(I1/sqrt(2))*cos(FiIL);
Potencia_Ap:=sqrt(3)*sqrt(ILms)*Vp;
FP:=DF*FDez;
WRITELN;
WRITELN;
writeln('**** DATOS OBTENIDOS APLICANDO LA TECNICA DE CC ****');
writeln;
writeln('í =',FiIL*(180/pi):8:5,' ','FDez=',FDez:5:4);
writeln;
writeln('DF=',DF:6:5);
writeln;
writeln('ILrms =',sqrt(ILms):6:4);
writeln;
writeln('FACTOR DE POTENCIA = FD*FDez = ',FP:6:4);
writeln;
writeln('POTENCIA REAL CON FORMULA CONV. = ',Potencia_IL:8:4);
writeln;
Writeln('POTENCIA APARENTE =',Potencia_Ap:8:4);
writeln;
writeln('An1 = ',An1L:6:4,' ','Bn1L = ',Bn11:6:4);
end;
Procedure Variacion;
Begin
Nn:=1;
Z:=Amplitud[Nn];
While Nn <=25 do
begin
Harm[Nn]:= (Amplitud[Nn]-(Z/Nn))*100;
Writeln('Variacion de la',' ',Nn,'a',' ','Armonica','
Nn:=Nn+1;
end;
Writeln;
end;
',Harm[Nn]:6:3,' ','%');
Procedure Ejes1;
Var
i,y:integer;
Begin
Line(0,0,0,getmaxy); {eje Y}
Line(0,getmaxy,getmaxx,getmaxy); {EJE Y}
For i:=1 to 16 do
108
Begin
y:=getmaxy-i*(round(0.0625*getmaxy));
line(0,y,3,y);
end;
end;
Procedure Ejes2;
Var
i,y:integer;
Begin
Line(0,0,0,getmaxy);
Line(0,getmaxy,getmaxx,getmaxy);
Line(0,round(0.5*getmaxy),getmaxx,round(0.5*getmaxy));
end;
Procedure Ejes3;
Var
i,y:integer;
Begin
Line(0,0,0,getmaxy); {eje Y}
Line(0,getmaxy,getmaxx,getmaxy); {EJE Y}
For i:=1 to 16 do
Begin
y:=getmaxy-i*(round(0.0625*getmaxy));
line(0,y,3,y);
end;
For i:=1 to 3 do
Begin
y:=getmaxy-i*(round(0.25*getmaxy));
line(0,y,590,y);
end;
end; {ejes}
Procedure Grafica_PW;
Begin;
For K:=0 to (2*N*Fs-1) do
Begin
PWMa:=PWM[k]*1.5E4;
PWMb:=PWM[k+1]*1.5E4;
Line(round(PWMa),GetmaxY,round(PWMa),round(0.9*GetmaxY));
Line(round(PWMa),round(0.9*GetmaxY),round(PWMb),round(0.9*GetmaxY));
line(round(PWMb),round(0.9*GetmaxY),round(PWMb),getmaxy);
K:=k+1;
end;
end;
109
Procedure Grafica_PW2;
Begin;
For K:=0 to (2*N*Fs-1) do
Begin
PWMa:=(P*1.5E4)+PWM[k]*1.5E4;
PWMb:=(P*1.5E4)+PWM[k+1]*1.5E4;
Line(round(PWMa),GetmaxY,round(PWMa),round(0.9*GetmaxY));
Line(round(PWMa),round(0.9*GetmaxY),round(PWMb),round(0.9*GetmaxY));
line(round(PWMb),round(0.9*GetmaxY),round(PWMb),getmaxy);
K:=k+1;
end;
end;
Procedure Grafica_PWM;
Begin
PWMa:=0;
Grafica_PW;
Grafica_PW2;
outtextxy(round(0.95*getmaxx),round(0.9*getmaxy),' PWM');
Outtextxy(round(0.92*getmaxx),round(0.95*getmaxy),'PARA C1');
end;
Procedure Graf_Arm;
Begin
Nn:=1;
While Nn <=25 do
Begin
Vertical:=getmaxy-(Amplitud[Nn]*5*ESC);
line((15*Nn),getmaxy,(15*Nn),round(Vertical));
Nn:=Nn+2;
end;
Outtextxy(round(0.25*getmaxx),round(0.3*getmaxy),'MAGNITUD DE LAS
COMPONENTES ARMONICAS');
Outtextxy(round(0.36*getmaxx),round(0.35*getmaxy),'DEL ULTIMO PERIODO');
end;
Procedure Graf_Ir;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.5E4;
f:=(round(0.5*getmaxy)-(Gama[j]*5));
lineto(round(q),round(f));
t:=t+h;
end;
outtextxy(round(0.8*getmaxx),round(0.3*getmaxy),'Grafica de Ir');
110
Outtextxy(round(0.25*getmaxx),round(0.9*getmaxy),'GRAFICA DE LOS ULTIMOS DOS
PERIODOS');
end;
Procedure Graf_Isc;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.5E4;
d:=(round(0.5*getmaxy)-(Beta[j])*3*ESC);
lineto(round(q),round(d));
t:=t+h;
end;
outtextxy(round(0.95*getmaxx),round(0.47*getmaxy),'isc');
Outtextxy(round(0.25*getmaxx),round(0.1*getmaxy),'GRAFICA DE LOS ULTIMOS DOS
PERIODOS');
end;
Procedure Graf_PWMisc;
Begin
moveto(round(ti*1.5E4),round(0.5*getmaxy));
Graf_Isc;
Moveto(round(ti*1.5E4),getmaxy);
Grafica_PWM;
end;
Procedure Graf_IL;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.5E4;
g:=(round(0.5*getmaxy)-(Delta[j]*3*ESC));
lineto(round(q),round(g));
t:=t+h;
end;
outtextxy(round(0.8*getmaxx),round(0.3*getmaxy),'Grafica de IL');
Outtextxy(round(0.25*getmaxx),round(0.9*getmaxy),'GRAFICA DE LOS ULTIMOS
DOS PERIODOS');
end;
Procedure Grafica_Vx;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
111
q:=t*1.5E4;
o:=(round(0.5*Getmaxy)-(Sigma[j]*(ESC/8)));
lineto(round(q),round(o));
t:=t+h;
end;
outtextxy(round(0.8*getmaxx),round(0.3*getmaxy),'Grafica de Vx');
Outtextxy(round(0.25*getmaxx),round(0.9*getmaxy),'GRAFICA DE LOS ULTIMOS
DOS PERIODOS');
end;
Procedure Graf_Ir2;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.5E4;
f:=(round(0.25*getmaxy)-(Gama[j]*4));
lineto(round(q),round(f));
t:=t+h;
end;
outtextxy(round(0.95*getmaxx),round(0.2*getmaxy),' Ir');
end;
Procedure Graf_Isc2;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.5E4;
d:=(round(0.5*getmaxy)-(Beta[j])*2*ESC);
lineto(round(q),round(d));
t:=t+h;
end;
outtextxy(round(0.95*getmaxx),round(0.47*getmaxy),' isc');
end;
Procedure Graf_IL2;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.5E4;
g:=(round(0.75*getmaxy)-Delta[j]*2*ESC);
lineto(round(q),round(g));
t:=t+h;
end;
outtextxy(round(0.95*getmaxx),round(0.7*getmaxy),' IL');
112
end;
Procedure Graf_VS;
Begin
ts:=h;
For j:=1 to PUNTOS do
Begin
q:=ts*1.5E4;
f:=(round(0.25*getmaxy)-(Vin[j]*(ESC/5)));
lineto(round(q),round(f));
ts:=ts+h;
end;
end;
Procedure Graf_Vs2;
Begin
ts:=ti;
For j:=1 to PUNTOS do
Begin
q:=ts*1.5E4;
g:=(round(0.75*getmaxy)-(Vin[j]*(ESC/5)));
lineto(round(q),round(g));
ts:=ts+h;
end;
end;
Procedure Graf_Fund;
Begin
t:=h;
Cnr:=sqrt(sqr(An11)+sqr(Bn11));
For j:=1 to puntos do
Begin
q:=t*1.5E4;
FF:= Cnr*sin(w*t+FiIr);
FF1:=round(0.25*getmaxy)-FF*(ESC);
lineto(round(q),round(FF1));
t:=t+h;
end;
end;
Procedure Graf_FundL;
Begin
t:=h;
CnL:=sqrt(sqr(An1L)+sqr(Bn1L));
For j:=1 to puntos do
Begin
q:=t*1.5E4;
113
FF:= CnL*sin(w*t+FiIL);
FF1:=round(0.25*getmaxy)-FF*ESC;
putpixel(round(q),round(FF1),5);
t:=t+h;
end;
end;
Procedure Grafica_Todas;
Begin
Ejes3;
moveto(round(ti*1.5E4),round(0.25*getmaxy));
Graf_Ir2;
Moveto(round(ti*1.5E4),round(0.50*getmaxy));
Graf_PWMisc; {Graf_Isc2;}
moveto(round(ti*1.5E4),round(0.75*getmaxy));
Graf_IL2;
moveto(0,round(0.25*getmaxy));
Graf_Vs;
moveto(round(ti),round(0.25*getmaxy));
Graf_fund;
{moveto(0,round(0.25*getmaxy));}
Graf_fundL;
readln;
end;
Procedure Graf_Fund2;
Begin
t:=h;
Cnr:=sqrt(sqr(An11)+sqr(Bn11));
For j:=1 to puntos do
Begin
q:=t*1.8E4;
FF:= Cnr*sin(w*t+FiIr);
FF1:=round(0.5*getmaxy)-FF*ESC*2;
putpixel(round(q),round(FF1),10);
t:=t+h;
end;
end;
Procedure Graf_FundL2;
Begin
t:=h;
CnL:=sqrt(sqr(An1L)+sqr(Bn1L));
For j:=1 to puntos do
Begin
q:=t*1.8E4;
FF:= CnL*sin(w*t+FiIL);
114
FF1:=round(0.5*getmaxy)-FF*ESC*2;
putpixel(round(q),round(FF1),12);
t:=t+h;
end;
end;
Procedure Graf_Ir3;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.8E4;
f:=(round(0.5*getmaxy)-(Gama[j]*ESC*2));
lineto(round(q),round(f));
t:=t+h;
end;
outtextxy(round(0.8*getmaxx),round(0.3*getmaxy),'Grafica de Ir');
Outtextxy(round(0.25*getmaxx),round(0.9*getmaxy),'GRAFICA DE LOS ULTIMOS DOS
PERIODOS');
end;
Procedure Grafica_3;
Begin
Ejes2;
moveto(round(ti*1.5E4),round(0.5*getmaxy));
Graf_Ir3;
moveto(round(ti),round(0.5*getmaxy));
Graf_fund2;
Graf_fundL2;
readln;
end;
Procedure Graf_IL3;
Begin
t:=ti;
For j:=1 to PUNTOS do
Begin
q:=t*1.8E4;
g:=(round(0.5*getmaxy)-Delta[j]*ESC*2);
lineto(round(q),round(g));
t:=t+h;
end;
outtextxy(round(0.95*getmaxx),round(0.7*getmaxy),' IL');
end;
Procedure Grafica_4;
Begin
115
Ejes2;
moveto(round(ti*1.5E4),round(0.5*getmaxy));
Graf_IL3;
moveto(round(ti),round(0.5*getmaxy));
Graf_fund2;
Graf_fundL2;
readln;
end;
{NEUTON RAMPHSON}
Procedure Potencia;
Begin
If (K MOD 2) = 1
then B:=-1
else B:=1
end;
Procedure Val_inicial;
Begin
A:=(pi/N)*(k+B/4);
end;
Procedure Newton_Ramson;
Var salida:Boolean;
Begin
salida:=false;
While salida=false do
Begin
FA:= (pi/(2*N))*(2*k+B*M*SIN(A))-A;
F1A:=(pi/(2*N))*B*M*COS(A)-1;
N1:= A-fA/f1A;
A:=N1;
E:=N1*180/pi;
If abs(FA) <= (10e-6) Then
Begin
salida:=true;
Lamda[k]:=E;
end;
end;
end;
Procedure alfa1_N;
Begin
For K:=0 to N do
Begin
alfa[k]:=lamda[k]
116
end;
end;
Procedure alfaN_k;
Begin
LL:=2*N;
KK:=LL;
alfa[kk]:=360;
for k:=1 to N do
Begin
j:=LL-1;
alfa[j]:=alfa[kk]-alfa[k];
LL:=LL-1;
end;
End;
Procedure alfamodif;
Begin
For NM:=2 to Fs do
Begin
LL:=2*N*NM;
KK:=LL;
MM:=2*N;
alfa[kk]:=360*NM;
For k:= 1 to MM do
Begin
j:=LL-1;
alfa[j]:=alfa[kk]-alfa[k];
LL:=LL-1;
end;
end;
LL:=2*N*Fs;
For k:=0 to LL do
Begin
PWM[k]:=alfa[k]*p/(360*Fs)+(Alf1*p/360);
writeln('Beta',k,'=',alfa[k]*pi/360:8:4,' ','t =',PWM[k]:8:6);
end;
end;
Procedure Alfatiempo;
Begin
LL:=2*N*FS;
writeln;
For k:=0 to LL do
begin
ALfat[k] := PWM[k];
end;
117
end;
Procedure Ramson;
Begin
A:=0;
For k:= 0 to N do
Begin
Potencia;
Val_inicial;
Newton_Ramson;
end;
alfa1_N;
alfaN_k;
alfamodif;
Alfatiempo;
Readln;
end;
Procedure Nuevo2;
Begin
Ramson;
Runge_isc;
writeln;
CoeficientesIr;
writeln;
Voltaje_Vrms;
Corriente_rms;
PowerIr;
readln;
coeficientesIL;
writeln;
Corriente_lms;
PowerIL;
readln;
writeln;
Variacion;
writeln;
end;
Procedure Escribirdatos;
Var
result : text;
Nombre : string [20];
Begin
Write('Escriba el nombre del archivo para guardar los datos : ');
readln(Nombre);
assign(result,Nombre);
118
rewrite(result);
Begin
writeln(result,' ');
writeln(result,' ');
writeln(result,'à = ',alf1);
writeln(result,' ');
Writeln(result,'C1=',C1:8:6,' ','C2=',C2:8:6,' ','L=',L:8:5,' ','RL=',RL);
Writeln(result,' N=',N:3,'
','M=',M:8:5,' ','Fs=',FS:3,' ','NP=',NP);
writeln(result,' ');
writeln(result,'ILrms =',sqrt(ILms):6:4);
writeln(result,' ');
writeln(result,'í =',FiIL*(180/pi):8:5,' ','FDez=',FDez:5:4);
writeln(result,' ');
Writeln(result,'El factor de distorci¢n =',DF:7:5);
writeln(result,' ');
writeln(result,'FP =',FP:6:5);
Writeln(result,'Numero de puntos calculados=',puntos);
end;
close(result);
end;
BEGIN {PRINCIPAL}
Clrscr;
Gd:=Detect;
Portada;
Clrscr;
Nuevo2;
readln;
InitGraph(Gd,Gm,GetEnv('Graph'));
Ejes1;
Grafica_PWM;
readln;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Ejes1;
Graf_arm;
readln;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Ejes2;
moveto(round(ti*1.5E4),round(0.5*getmaxy));
Graf_Ir;
readln;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Ejes2;
moveto(round(ti*1.5E4),round(0.5*getmaxy));
119
Graf_PWMIsc;
readln;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Ejes2;
moveto(round(ti*1.5E4),round(0.5*getmaxy));
Graf_IL;
readln;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Ejes2;
moveto(round(ti*1.5E4),round(0.5*getmaxy));
Grafica_Vx;
readln;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Grafica_Todas;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Grafica_3;
Closegraph;
InitGraph(Gd,Gm,GetEnv('Graph'));
Grafica_4;
Closegraph;
Writeln;
Writeln;
Writeln;
Writeln('R E S U L T A D O S O B T E N I D O S');
Writeln('C1=',C1:8:6,' ','C2=',C2:8:6,' ','L=',L:8:5,' ','RL=',RL);
Writeln(' N=',N:3,'
','M=',M:8:5,' ','Fs=',FS:3,' ','NP=',NP);
Writeln('Numero de puntos calculados =',puntos);
writeln;
writeln('ILrms =',sqrt(ILms):6:4);
writeln;
writeln('í =',FiIL*(180/pi):8:5,' ','FDez=',FDez:5:4);
writeln;
Writeln('El factor de distorci¢n =',DF:7:5);
writeln;
writeln('FP =',FP:6:5);
writeln;
writeln('Vx max = ',Vxmax:8:4,' ','Isc max = ',Iscmax:6:4);
readln;
Escribirdatos;
End.
120
Apendice A2
Listado del programa para optimizar los parámetros del
circuito y el patrón de conmutación utilizando el Método
de gradientes conjugados
Program Steep;
Uses Crt,Dos,printer, graph;
Var
VGa,Vgb,An,Bn:real;
AJT,Jmax,Beta :real;
{******ESTE PROGRAMA UTILIZA EL
METODO*******}
{**********DE GRADIENTES CONJUGADOS**********}
N,m,L,k,min:integer;
x : array[0..20] of real;
x0 :array[0..20] of real;
da : array[1..200,0..12] of real;
Xn : array[1..20] of real;
Yn : array[1..20] of real;
J : array[0..300] of real;
A : array[1..20] of real;
B : array[1..20] of real;
Vg : array[1..20] of real;
DDj : array[1..200] of real;
Const
Vm=179.6;
w=376.99;
C1=43e-6;
C2=4e-6;
Procedure Leer_x0;
Begin
For m:=0 to 12 do
Begin
write('Introduce é',m,'=');
read(x0[m]);
end;
end;
Procedure Leer_Xn;
Begin
For m:=1 to 11 do
Begin
write('Introduce Xn',m,'=');
121
read(Xn[m]);
end;
end;
Procedure Leer_Yn;
Begin
For m:=1 to 11 do
Begin
write('Introduce Yn',m,'=');
read(Yn[m]);
end;
end;
Procedure Evalua_F1;
Begin
An:=0;
Bn:=0;
m:=0;
N:=1;
While m <= 10 do
Begin
An:=An+ C1*(cos(2*x[m])-cos(2*x[m+1]))+C2*(cos(2*x[m+1])-cos(2*x[m+2]));
m:=m+2
end;
m:=1;
While m<= 11 do
Begin
Bn:=Bn + C1*(x[m]+sin(2*x[m])/2-x[m-1]-sin(2*x[m-1])/2);
Bn:=Bn + C2*(x[m+1]+ sin(2*x[m+1])/2-x[m]-sin(2*x[m])/2);
m:=m+2;
end;
A[N]:=(Vm*w)/(4*pi)*An;
B[N]:=(Vm*w)/(2*pi)*Bn;
end;
Procedure Evalua_Fn;
Begin
For N:=2 to 11 do
Begin
An:=0;
Bn:=0;
m:=0;
While m <= 10 do
Begin
An:=An + C1*((cos((n+1)*x[m])-cos((n+1)*x[m+1]))/(n+1));
An:=An + C1*((cos((n-1)*x[m])-cos((n-1)*x[m+1]))/(n-1));
An:=An + C2*((cos((n+1)*x[m+1])-cos((n+1)*x[m+2]))/(n+1));
122
An:=An + C2*((cos((n-1)*x[m+1])-cos((n-1)*x[m+2]))/(n-1));
m:=m+2
end;
m:=1;
While m<= 11 do
Begin
Bn:=Bn + C1*((sin((n+1)*x[m])-sin((n+1)*x[m-1]))/(n+1));
Bn:=Bn + C1*((sin((n-1)*x[m])-sin((n-1)*x[m-1]))/(n-1));
Bn:=Bn + C2*((sin((n+1)*x[m+1]) - sin((n+1)*x[m]))/(n+1));
Bn:=Bn + C2*((sin((n-1)*x[m+1])-sin((n-1)*x[m]))/(n-1));
m:=m+2;
end;
A[N]:=(Vm*w)/(2*pi)*An;
B[N]:=(Vm*w)/(2*pi)*Bn;
end;
end;
Procedure Evalua_J;
Begin
Evalua_F1;
Evalua_Fn;
AJT:=0;
For N:=1 to 11 do
Begin
AJT:= AJT + (sqr(A[n] - Xn[n]) + sqr(B[n] - Yn[n]));
end;
end;
Procedure Evalua_VG;
Begin
For m:=1 to 11 do
Begin
IF (m mod 2) = 1 then
Begin
VG[m]:=0;
N:=1;
VGa:= (A[n] - Xn[n])*(Vm*w)/pi *(C1-C2)*(sin((n+1)*x[m]));
VGb:= (B[n] - Yn[n])*(Vm*w)/pi *(C1-C2)*(1+cos((n+1)*x[m]));
VG[m]:= VGa+VGb;
For N:= 2 to 11 do
Begin
VGa:= (A[n] - Xn[n])*(Vm*w)/pi *(C1-C2)*(sin((n+1)*x[m])+sin((n-1)*x[m]));
VGb:= (B[n] - Yn[n])*(Vm*w)/pi *(C1-C2)*(cos((n+1)*x[m]) + cos((n-1)*x[m]));
VG[m]:=VG[m]+ Vga+VGb;
end;
{write('VG',m,'=',VG[m]:8:5);
write(' ');}
123
end
else
Begin
VG[m]:=0;
N:=1;
VGa:= (A[n] - Xn[n])*(Vm*w)/pi *(C2-C1)*(sin((n+1)*x[m]));
VGb:= (B[n] - Yn[n])*(Vm*w)/pi *(C2-C1)*(1+cos((n+1)*x[m]));
VG[m]:= Vga+Vgb;
For N:= 2 to 11 do
Begin
VGa:= (A[n] - Xn[n])*(Vm*w)/pi *(C2-C1)*(sin((n+1)*x[m]) + sin((n-1)*x[m]));
VGb:= (B[n] - Yn[n])*(Vm*w)/pi *(C2-C1)*(cos((n+1)*x[m]) + cos((n-1)*x[m]));
VG[m]:=VG[m] + Vga+Vgb;
end;
{write('VG',m,'=',VG[m]:8:5);
write(' ');}
end;
end;
end;
Procedure Setx0_xi;
Begin
For m:=0 to 12 do
Begin
x[m]:=x0[m];
end;
end;
Procedure Setxi_x0;
Begin
For m:=0 to 12 do
Begin
x0[m]:=x[m];
end;
end;
Procedure Valores_XL;
begin;
For m:=0 to 12 do
Begin
x[m]:=x0[m] + beta*da[k,m];
end;
end;
Procedure Escribir_x;
Begin
For m:=0 to 12 do
124
Begin
writeln('x',m,' = ',x[m]:10:9);
end;
end;
Procedure Calculo_DDJ;
Begin
DDJ[k]:=0;
For m:=1 to 11 do
Begin
DDJ[k]:=DDJ[k]+sqr(Vg[m]);
end;
end;
Procedure SetVG_0;
Begin
For m:=0 to 12 do
Begin
Vg[m]:=0;
end;
end;
Procedure Direccion;
Begin
IF k=1 then
For m:=0 to 12 do
Begin
da[k,m]:=-Vg[m];
end
Else
Begin
For m:=0 to 12 do
Begin
da[k,m]:= -Vg[m] + ((DDJ[k]/DDJ[k-1]))*da[k-1,m];
end;
end;
end;
Procedure Proximo_x;
Begin
k:=1;
L:=1;
Beta:=0;
{2}
Jmax:=10E20;
125
Begin
While k < 124 do
Begin
Evalua_J;
{3}
IF (AJT > Jmax) then
Begin
Beta:=Beta-30E-5;
Valores_XL;
Evalua_J;
writeln('AJT=',AJT:10:8);
k:=k+1;
writeln('k=',k);
Evalua_Vg;
Calculo_DDj;
Direccion;
SetXi_X0;
Escribir_X;
Beta:=0;
Jmax:=10E20;
end
Else
Begin
Jmax:=AJt;
IF L=1 then
Begin
Evalua_Vg;
Calculo_DDJ;
Direccion;
end;
Beta:=Beta+ 30E-5;
Valores_XL;
L:=L+1;
end;
end;
end;
END;
Procedure ValoresIni;
Begin
x0[0]:=0;
x0[1]:=0.5;
x0[2]:=1;
x0[3]:=1.5;
x0[4]:=2;
x0[5]:=2.5;
x0[6]:=3;
126
x0[7]:=3.5;
x0[8]:=4;
x0[9]:=4.5;
x0[10]:=5;
x0[11]:=5.5;
x0[12]:=2*pi;
end;
Procedure ValoresYnini;
Begin
Yn[1]:=0;
Yn[2]:=0;
Yn[3]:=0;
Yn[4]:=0;
Yn[5]:=-1.31;
Yn[6]:=0;
Yn[7]:=-0.936;
Yn[8]:=0;
Yn[9]:=0;
Yn[10]:=0;
Yn[11]:=0.595;
Yn[12]:=0
Yn[12]:=0.504
end;
Procedure ValoresXnini;
Begin
For m:=1 to 13 do
Begin
Xn[m]:=0;
end;
end;
BEGIN {PRINCIPAL}
Clrscr;
{leer_x0;
Leer_Xn;
Leer_Yn;}
ValoresIni;
ValoresXnini;
ValoresYnini;
SetVg_0;
SetX0_xi;
proximo_x;
readln;
end.
127
Apéndice A3
Listado del programa del microcontrolador 8031 para generar
el patrón de conmutación PWM.
ORG 00H
JMP START
ORG 0BH
START:
INICIO:
MOV SP,#77H
MOV TMOD,#01H
MOV TCON,#10H
MOV P1,#00H
;SE ESTABLECE T0 COMO
;TIMER EN MODO 1
ACALL BASET1
ACALL C1
ACALL RESISC1
ACALL BASET2
ACALL C2
ACALL RESISC2
ACALL BASET3
ACALL C1
ACALL RESISC1
ACALL BASET4
ACALL C2
ACALL RESISC2
ACALL BASET5
ACALL C1
ACALL RESISC1
ACALL BASET6
ACALL C2
ACALL RESISC2
ACALL BASET7
ACALL C1
ACALL RESISC1
ACALL BASET8
ACALL C2
ACALL RESISC2
ACALL BASET9
ACALL C1
ACALL RESISC1
ACALL BASET10
ACALL C2
ACALL RESISC2
ACALL BASET11
ACALL C1
ACALL RESISC1
ACALL BASET12
ACALL C2
ACALL RESISC2
LJMP INICIO
128
;*********************************
;*****RUTINA BASE DE TIEMPO T1****
;*********************************
BASET1:
MOV TH0,#0FEH
MOV TL0,#2BH
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T2****
;*********************************
BASET2:
MOV TH0,#0F8H
MOV TL0,#0EH
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T3****
;*********************************
BASET3:
MOV TH0,#0F9H
MOV TL0,#7EH
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T4****
;*********************************
BASET4:
MOV TH0,#0FDH
MOV TL0,#8FH
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T5****
;*********************************
BASET5:
MOV TH0,#0FBH
MOV TL0,#0DEH
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T6****
;*********************************
BASET6:
MOV TH0,#0F8H
MOV TL0,#27H
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T7****
;*********************************
BASET7:
MOV TH0,#0FCH
MOV TL0,#4AH
RET
129
;*********************************
;*****RUTINA BASE DE TIEMPO T8****
;*********************************
BASET8:
MOV TH0,#0F8H
MOV TL0,#2DH
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T9****
;*********************************
BASET9:
MOV TH0,#0F9H
MOV TL0,#62H
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T10***
;*********************************
BASET10:
MOV TH0,#0FDH
MOV TL0,#92H
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T11***
;*********************************
BASET11:
MOV TH0,#0FBH
MOV TL0,#0EFH
RET
;*********************************
;*****RUTINA BASE DE TIEMPO T12****
;*********************************
BASET12:
MOV TH0,#0F6H
MOV TL0,#36H
RET
;*********************************
;****** C1 ESTADO ALTO ******
;*********************************
C1:
SETB P1.0
CLR P1.1
DELAY :
JNB TCON.5,DELAY
CLR TCON.5
RET
130
;*********************************
;****** C1 ESTADO BAJO ******
;*********************************
C2:
CLR P1.0
SETB P1.1
MOMEN: JNB TCON.5,MOMEN
CLR TCON.5
RET
;*************************************************
;**** ENTRADA DE LA RESISTENCIA DESPUES DE C1 ****
;*************************************************
RESISC1:
MOV R5,#2
SETB P1.2
RES:
DJNZ R5,RES
CLR P1.0
MOV R5,#2
RES1:
DJNZ R5,RES1
SETB P1.1
MOV R5,#2
RES2:
DJNZ R5,RES2
CLR P1.2
RET
;*************************************************
;**** ENTRADA DE LA RESISTENCIA DESPUES DE C2 ****
;*************************************************
RESISC2:
MOV R5,#2
SETB P1.2
RES3:
DJNZ R5,RES3
CLR P1.1
MOV R5,#2
RES4:
DJNZ R5,RES4
SETB P1.0
MOV R5,#2
RES5:
DJNZ R5,RES5
CLR P1.2
RET
END
131