ANÁLISIS POR FATIGA EN DUCTOS ASCENDENTES JJ
Anuncio

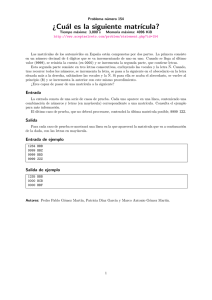
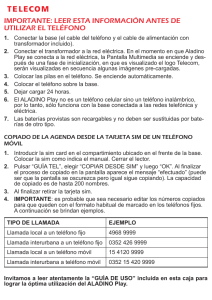
ANÁLISIS POR FATIGA EN DUCTOS ASCENDENTES J. J. Cortés Romero Instituto Mexicano del Petróleo Eje Central Lázaro Cárdenas No. 152, Apdo. Postal 14-805 G. A. Madero, 07730, México D. F. RESUMEN En general, en el análisis de vida por fatiga se requieren de numerosos análisis dinámicos, por lo que conviene aplicar un juicio de ingeniería para desarrollar un modelo estructural que logre representatividad de los resultados sin un excesivo esfuerzo computacional, dicho juicio debe tomar en cuenta las limitaciones inherentes a los distintos métodos de análisis de vida por fatiga. Se presenta en este trabajo una metodología desarrollada para un caso de análisis por fatiga en ductos ascendentes marinos, con el objetivo de establecer los orígenes de grietas reportadas en la unión con la camisa de protección anticorrosiva, zona de marea y oleaje. SUMMARY In General, fatigue life analysis requires numerous dynamic analyses, therefore it is convenient to apply engineering judgement in order to develop an structural model that achieves representative results without an excessive computational effort, additionally such judgement most take into consideration the inherent limitations of the distinct fatigue analysis methods. In this work a fatigue analysis methodology is presented for a fixed marine riser case, with the objective of establishing the origins of reported cracks at the joint of the pipe with the anticorrosion protection sleeve, splash zone. INTRODUCCION La fatiga es uno de los modos de falla que puede conducir a colapsos o fallas catastróficas, en ocasiones sin previo aviso. Este fenómeno se caracteriza por la generación de grietas, que generalmente conducen a la falla de la estructura bajo niveles de esfuerzo menores a los máximos de diseño. Por lo tanto, existen, al menos, dos rutas de acción para prevenir fallas por fatiga, en primer lugar un diseño de ingeniería que tome en cuenta los esfuerzos cíclicos a los que la estructura estará sometida durante su vida útil, a fin de lograr una resistencia apropiada ante dicho modo de falla y en segundo lugar la inspección y/o monitoreo de las secciones susceptibles, a fin de tomar las medidas pertinentes que eliminen o mitiguen el crecimiento de las grietas. Siguiendo prácticas de inspección rutinaria en la Sonda de Campeche se descubrieron grietas en la unión de la camisa de protección anticorrosiva con el ducto ascendente, en la zona de marea y oleaje. Los ductos ascendentes son estructuras para conducción de hidrocarburos, unen las tuberías de cubierta de las plataformas marinas de producción petrolera con las tuberías submarinas. Los fluidos que conducen dichas tuberías se encuentran a temperaturas que varían entre 80 y 100 OC. Si se toma en cuenta que la temperatura promedio del agua marina de 20 OC, se observa que al variar la superficie mojada del ducto con el paso de cada ola se presenta un efecto de enfriamiento, que puede conducir a esfuerzos térmicos significativos. Por otra parte, el oleaje constituye una carga dinámica, que es generadora de esfuerzos cíclicos. Con objeto de investigar las posible causas que originaron las grietas encontradas durante las inspecciones de rutina se está llevando a cabo un proyecto en el que se revisan las diversas fuentes de fatiga para el tipo de ductos ascendentes considerados. A continuación se presentan los modelos de análisis y resultados de la etapa de investigación de los efectos de oleaje en la generación de grietas por fatiga. ANALISIS DE VIDA POR FATIGA El mecanismo que da lugar a la falla por fatiga es la iniciación de la grieta, como consecuencia de fluctuaciones en el nivel de esfuerzos, la propagación de la misma hasta un tamaño critico y finalmente la ruptura inestable de la sección. Las oscilaciones de los esfuerzos se deben a la naturaleza cíclica de los procesos de carga, como son viento, oleaje, sismo, etc., los cuales inducen una respuesta dinámica de la estructura. Por lo tanto las estructuras costa afuera son sensibles a la falla por fatiga, especialmente si el comportamiento estructural es predominantemente dinámico. El mecanismo básico de la fatiga puede verse agravado por una serie de factores, como la presencia de defectos de manufactura, particularmente en soldaduras y por concentraciones de esfuerzos debidas a errores de diseño, por esfuerzos residuales, etc. La evaluación de la resistencia a la fatiga se basa en la determinación del crecimiento de la grieta hasta su longitud critica y ruptura inestable. Para ello, en términos generales existen en la actualidad dos métodos, la mecánica de fractura y el método de las curvas S-N. La Mecánica de Fractura. El objetivo de la mecánica de fractura es el de predecir el crecimiento de una grieta hasta su tamaño crítico, a partir de un tamaño de inicial de grieta. Usualmente, se supone que un defecto de fabricación es el tamaño inicial de grieta y su crecimiento puede ser evaluado, en la región subcrítica, por la ley de Paris, (Paris y Erdogan, 1963): da / dN = C (∆K ) m (1) donde: da / dN , velocidad de crecimiento de la grieta, ∆K , amplitud de factor de intensificación de esfuerzos, C y m , constantes de ajuste de curva. La inestabilidad final o crítica de la fractura se alcanza cuando el factor de intensificación de esfuerzos toma un valor crítico, K 1C , el cual es también conocido como tenacidad a la fractura. Los valores de K 1C se obtienen en laboratorio, para cada material, están sujetos a una importante dispersión estadística y tienen una dependencia importante de la temperatura, (Harris, 1995). En la actualidad la mecánica de fractura tiene un importante potencial como técnica para predecir el crecimiento de grietas; sin embargo, aún no se aplica como herramienta rutinaria de diseño, entre otras razones por la escasez de valores para parámetros tales como la tenacidad a la fractura. El Método de las Curvas S-N. La curvas S-N son, por así decirlo, el método clásico para evaluación de la vida por fatiga. Se caracteriza por el uso de los diagramas S-N, los cuales relacionan la vida por fatiga, dada en número de ciclos a la falla, N, con un esfuerzo cíclico de amplitud constantes, S, en el cual se alcanza la falla. El diagrama S-N se obtiene sometiendo un número de especímenes maquinados, a distintos niveles de amplitud de esfuerzo, hasta la falla por fatiga. Los resultados se grafican en un formato logarítmico y se ajusta un curva. Comúnmente las curvas S-N presentan una tendencia lineal, la cual se expresa por: NS m = A (2) donde: N , número de ciclos a la falla para una amplitud constante de esfuerzo, S , amplitud del esfuerzo, m , y A , constantes empíricas definidas por el ajuste de curva. Una de las principales características de los diagramas S-N es que las curvas están sujetas a una importante dispersión estadística, lo cual refleja la gran incertidumbre en los parámetros que definen el comportamiento por fatiga y las dificultades asociadas con su modelaje. (Wirsching, 1995) indicó que los coeficientes de variación típicos de los ciclos a la falla, N , van del 30 al 40 % y llegan incluso hasta un 150%. Sin embargo, el método de las curvas S-N ha sido la herramienta básica para la predicción de la vida por fatiga. Por su definición las curvas S-N tienen implícito un criterio de falla, la iniciación de la grieta o la ruptura de la pieza a un nivel de esfuerzo cíclico constante, aunque éste último es el comúnmente utilizado en las pruebas de laboratorio. El Departamento de Energía, Estados Unidos, (DOE, 1984) indica que debe tenerse en cuenta que al utilizar una curva S-N existe un l criterio de falla implícito, usualmente una fractura que atraviesa todo el espesor de pared. El diagrama S-N se utiliza para predecir la vida de la estructura por comparación de la vida esperada de servicio, N S , con el número de ciclos a la falla, N , la cual ocurre con una amplitud constante de esfuerzo al cual opera la estructura. Sin embargo, con mayor frecuencia las estructuras están sujetas a amplitudes de esfuerzo variable, debido a la naturaleza aleatoria de las cargas dinámicas, por lo tanto, la respuesta de las estructuras, o sea la amplitud del esfuerzo, también será aleatoria. El problema de la fatiga aleatoria es complejo, ya que la secuencia de variación de los esfuerzos, o historia de esfuerzos, puede ser importante, especialmente cuando la diferencia entre esfuerzos adyacentes es significativa. (Miner, 1945), haciendo caso omiso a los efectos de la historia de esfuerzos, propuso un modelo en el cual es daño sostenido por la estructura o componente, durante un periodo, para una amplitud de esfuerzo constante se acumula linealmente y puede agregarse al daño sostenido en otras amplitudes de esfuerzo, matemáticamente: n D=∑ i =1 Ni N Fi (3) donde : D , daño acumulado total, i , número de diferentes amplitudes de esfuerzo, i = 1K n , N i , número de ciclos sostenidos en la i esima amplitud de esfuerzo, N Fi , número de ciclos a la falla en la i esima amplitud de esfuerzo. La ley de daño acumulado (ecuación 3) se conoce como regla de Palmgren-Miner, ya que una expresión similar fue propuesta antes por Palmer, (Wirsching, 1995). La (ecuación 3) puede expresarse como: N D = ∑ Di (4) i =1 donde: Di = N Ti NFi (5) N Ti , número total de ciclos en el tiempo T , a la amplitud constante de esfuerzo Si , N F i , número de ciclos a la falla, a la amplitud constante de esfuerzo Si . Además, la regla de Miner establece que la falla ocurre cuando N T = N F y D = ∆ = 1 . Por lo tanto, el daño acumulado puede expresarse como: n D = ∑ Di = ∆ = 1 (6) i =1 Introduciendo la (ecuación 2) en la (ecuación 4), el daño puede expresarse ahora como: Di = NT m Si A (7) Aún más, si se define la frecuencia promedio del ciclo de esfuerzos como: fo = NT T (8) donde: N T , número de ciclos en el periodo T . Entonces la expresión para el daño por fatiga, (ecuación 6), puede escribirse como: Di = f oT m T S = Ω A A (9) donde: Ω = fo S m (10) se define como el parámetro de esfuerzo. Determinación del Parámetro de Esfuerzos. Existen en la actualidad dos métodos, principalmente, para determinar el valor del parámetro de esfuerzo, el determinístico y el probabílistico o espectral. Antes de describir estos métodos es conveniente indicar que las variaciones de la superficie marina se describen de una manera más realista por medio de un proceso aleatorio de banda ancha; sin embargo, se acepta ampliamente que para fines de ingeniería es válida la suposición de que la superficie marina puede ser representada por un proceso aleatorio de banda angosta o por una transformación en este último tipo de proceso. La superficie marina es un proceso no estacionario de largo plazo y se acepta que para periodos cortos de tiempo, entre tres y seis horas, la superficie marina permanece como un proceso estacionario, con propiedades estadísticas estacionarias; por lo tanto, una superficie marina no estacionaria de largo plazo puede describirse como un conjunto de procesos estacionarios de corto plazo, con una distribución de probabilidad normal. Ahora es posible regresar a la descripción de los métodos empleados para la determinación del parámetro de esfuerzos, (ecuación 10). En el método determinístico se utilizan los datos de la historia de tiempo para definir una altura de ola significante, Hs , y un periodo promedio de ola, Tz , para cada uno de los procesos estacionarios que describen el estado de mar de largo plazo. Entonces, cada conjunto de Hs y Tz se pueden usar en una forma determinística para determinar el esfuerzo en cada uno de los puntos de la estructura sensibles a la fatiga En el método probabilístico el parámetro de esfuerzo se determina usando la información estadística contenida en cada uno de los estados de mar de corto plazo que definen las condiciones ambientales. Mediante técnicas de análisis de series de Fourier, la serie de tiempo correspondiente a cada uno de los estados de mar de corto plazo se representa por la superposición de un número de componentes senoidales y se presenta como un espectro de frecuencia en el cual la ordenada en una frecuencia particular es la varianza de la componente de la ola senoidal. Las unidades de la ordenada son (cantida) 2 por unidad de frecuencia y ya que la potencia está directamente relacionada con la varianza a tal espectro de frecuencia se nn le conoce como función de densidad espectral de potencia, W . La respuesta de una estructura a una carga espectrales es también una cantidad espectral y la respuesta se relaciona con la excitación de entrada a través de la función de transferencia: S RR (ω ) = H F (ω ) W nn (ω ) 2 (11) donde: H F (ω ) , función de transferencia, y 2 S RR (ω ) , densidad espectral de potencia del esfuerzo. ANÁLISIS DINÁMICO El tipo de análisis dinámico que se aplicará al estudio de fatiga específico depende, como se desprende de los párrafos anteriores, del tipo de técnica que se requiera para la determinación del parámetro de esfuerzos. Así mismo, el análisis dinámico debe tomar en cuenta las excitaciones que produzcan esfuerzos cíclicos importantes. Análisis Dinámico del Ducto Ascendente. Las principales excitaciones dinámicas a las que se encuentran sometidas las estructuras marinas son oleaje, corriente y viento. La respuesta de la estructura ante dichas excitaciones depende de varios factores, entre ellos el tipo de estructura. Los ductos ascendentes de la Sonda de Campeche se encuentran sujetos a plataformas de acero fijas al fondo marino mediante pilotes. La estructura presenta desplazamientos horizontales como respuesta a la acción del oleaje y la corriente. Ya que el ducto ascendente está sujeto a la plataforma, los desplazamientos de la plataforma se convierten en una fuente de excitación dinámica para el ducto. Así mismo los claros que se forman entre los soportes que fijan el ducto a la plataforma están sometidos a la acción directa del oleaje y la corriente, pudiendo presentarse un efecto de vibración local debido a la generación de vórtices. Para seleccionar el tipo de análisis dinámico aplicable al ducto es necesario tomar en consideración las características de la plataforma que sean de interés desde el punto de vista dinámico. Las plataformas marinas a las que se encuentran sujetos los ductos ascendentes son de acero dúctil, están fijas al fondo marino, en tirantes de agua menores de 85 metros. Debido al tipo de configuración estructural y materiales con que están construidas estas plataformas no son significativamente sensibles a la amplificación de desplazamientos por efectos de comportamiento dinámico. Uno de los códigos internacionales aplicables a este tipo de plataformas (API RP 2ª, WSD, 1999) permite realizar análisis determinísticos para estimar la vida por fatiga en estructuras con elementos estructurales redundantes, fabricadas en aceros ductiles, con periodos naturales de vibración menores de 3 segundos y en tirantes de agua menores de 122 m. Ya que las plataformas marinas no son dinámicamente sensibles y por lo tanto los factores de amplificación dinámica no son significativos, es entonces razonable emplear los desplazamientos estáticos correspondientes para cada altura y periodo de ola armónica contenida en el espectro de oleaje como la fuente de excitación armónica para un análisis dinámico del ducto ascendente. Selección del Modelo para Análisis de Vida por Fatiga del Ducto. Con objeto de considerar el caso más general y representativo de la Sonda de Campeche se eligió un modelo basado en el ducto que pudiera presentar mayor sensibilidad dinámica y estuviera expuesto a las condiciones ambientales más desfavorables. Por lo tanto se eligió como ducto representativo para el presente estudio un ducto localizado en los campos con mayor tirante de agua. Con respecto a las cargas de oleaje se consideró que estas actúan siempre en la dirección más desfavorable para la plataforma, es decir, se asumió que todos los trenes de ola armónicos actúan siempre en la misma dirección de modo que ésta es aquella en la que se produce el máximo desplazamiento de la plataforma. El ducto seleccionado como representativo, para fines del presente estudio, es de 36 pulgadas de diámetro, en una plataforma con un tirante de agua de 63 metros y transporta petróleo crudo. Los análisis dinámicos se realizaron con el programa comercial Caesar II, versión 4.10, los datos requeridos del ducto para dichos análisis se muestran en la (tabla 1). Rigideces de la Plataforma. Por efecto de la interacción que tiene el ducto ascendente con la plataforma, se debe incluir la rigidez que ésta proporciona y que estará localizada en forma de resortes en cada una de las guías del ducto ascendente. Las figuras 1 y 2 muestran rigideces típicas de entrepiso. Frecuencia de excitación. Son varios análisis los que se realizaron para diferentes alturas significantes de olas y periodos de vibración, los cuales se muestran también en la (tabla 2). Cálculo del Anclaje Virtual. En el análisis de la línea se tiene que decidir qué longitud de la línea submarina, o regular, se debe incluir en el modelo. Basado en el equilibrio entre cargas térmicas, cargas de presión y fuerzas de restricción del suelo se obtiene un tramo de tubería que representa el anclaje virtual. Asumiendo que las fuerzas de restricción del suelo pueden ser caracterizadas por una fuerza de fricción constante por unidad de longitud y que la tubería está esforzada, para el cálculo del anclaje virtual se utiliza la expresión propuesta en el (anexo A), donde intervienen la presión, el radio medio del tubo, la fuerza de fricción, el módulo de Poisson, el coeficiente de expansión térmica, la variación de la temperatura y otros datos adicionales. Generación del Modelo Analítico del Ducto Ascendente. La generación del modelo analítico que se utilizó en las respectivas corridas del Caesar II, versión 4.10 es uno de los pasos más importante en el análisis por fatiga, ya que el modelo debe proporcionar resultados confiables al tiempo que optimize los recursos necesarios de computación. Por lo anterior, se debe tener en cuenta todas las condiciones tanto geométricas como de sitio que tiene la tubería para de esta forma obtener resultados apegados a la realidad. En este análisis se han considerado dos modelos del ducto ascendente con el fin de elegir el más adecuado para los análisis de fatiga: Modelo 1: El primero modelo es el del ducto ascendente considerando un tramo de línea regular determinado mediante la longitud de anclaje virtual, descrita anteriormente; se tienen los siguientes elementos: 1) El tramo del ducto ascendente con las respectivas rigideces localizadas en las guías y que representan la interacción de la plataforma. 2) La curva de expansión. 3) Un tramo de 499.9 m. de tubería superficial que se encuentra asentada directamente sobre el suelo. 4) Un tramo de 499.9 m. donde se produce el enterrado de la línea. 5) Un tramo de 625 m. que corresponde a la longitud de tubería enterrada. Modelo 2: Se consideró un segundo modelo, más simplificado, donde sólo se considera lo siguiente: 1) El tramo del ducto ascendente con las respectivas rigideces que representan la interacción de la plataforma. 2) La curva de expansión. 3) El extremo de la tubería con resortes que simulen la rigidez del tramo de tubería enterrada. Ambos modelos producen resultados bastante similares, como se muestra en las (tablas 3 y 4), la diferencia es que el modelo 2, ver (figura 3), tiene menores requerimientos de capacidad de computo, por lo tanto es el modelo seleccionado para la realización de los análisis de fatiga. ANÁLISIS DE VIDA POR FATIGA Se realizaron las corridas respectivas del análisis por fatiga, de acuerdo con los datos de la (tabla 2) y se aplicó la regla de Miner, (ecuación 9). Las curvas S-N empleadas fueron dos, la primera recomendada por los códigos ASME, Sección VIII, División 2, correspondiente a un acero de bajo carbón y resistencia última de 80000 libras por pulgada cuadrada y la segunda la recomendada por el API RP 2A WSD, estas se muestran en las (figuras 4 y 5) Análisis de Resultados. Los resultados de vida por fatiga se presentan en las (tablas 5 y 6), donde se observa que la vida por fatiga es siempre superior a la vida útil del ducto. Más importante aún es el hecho de que la sección con menor vida por fatiga es la cercana al fondo marino y no la sección de la zona de marea y oleaje, que es donde se reportaron grietas. Por lo tanto, las grietas reportadas no obedecen a efectos mecánicos generados por el oleaje. Se deberán investigar los efectos de esfuerzos térmicos locales. CONCLUSIONES Se presentaron los elementos necesarios para definir el tipo de análisis dinámico y método de evaluación de crecimiento de grieta para realizar un análisis de vida por fatiga. Se encontró que los efectos de oleaje no son los causantes de las grietas reportadas en la zona de marea y oleaje de ductos ascendentes. AGRADECIMIENTOS Se agradece la participación del M. en C. Nelson Rommel Burbano Bolaños por desarrollo de los análisis con el programa Caesar II, versión 4.10 así como figuras y tablas; también se agradece a los Ingenieros Juan Matias Acevedo Y Cesar A. Romero Hernández por su participación y sugerencias durante el desarrollo del presente proyecto. REFERENCIAS API RP 2A-WSD, (1993), “Planning, Desgning, and Construction of Fixed Offshore Platforms – Working Stress Design”. American Petroleum Institute, 20th Edition, July. ASME Seccion VIII División 2, (1994), “Rules for Construction of Pressure Vessels, Alternative Rules”. The American Society of Mechanical Engineers, 1994. Harris, D . O., (1995): “Probabilistic Fracture Mechanics”, in Probabilistic Structural Mechanics Handbook, Ed. Sundararajan, C., Chapman and Hall. Paris, P. C. y Erdogan, F., (1963): “A Critical Analysis of Crack Propagation Laws”, Transactions, American Society of Mechanical Engineers, Journal of Basic Engineering, Series D, Dec. pp 528 - 534. Miner, M. A., (1945): “Cumulative Damage in Fatigue”, Journal of Applied Mechanics, Vol. 12, pp. 156 164. TABLA 1. DATOS DEL DUCTO ASCENDENTE Servicio: Diámetro: D= Espesor nominal: t Línea Regular : Ducto Ascendente : Espesor adicional por corrosión: tc = L. Regular Ducto Ascendente Espesor del recubrimiento anticorrosivo: ta = Espesor del Lastre de concreto: (T. Enterrada) tl = Profundidad: Profundidad de enterrado a lomo superior: H= ZC = Crudo 36 1,00 1,00 0,125 0,200 0,075 3,500 m. Pulg. Pulg. Pulg. Pulg. Pulg. Pulg. Pulg. Pulg. 63,00 39,37 2479,68 Pulg. Kg/cm Presión de Operación: P= Temperatura máx. de operación: T = Temperatura Ambiente: Esfuerzo Mínimo de Fluencia: Longitud de la Junta de campo: Densidad del Agua: Densidad del contenido: Densidad de la junta de campo: Densidad del anticorrosivo: Densidad del acero: Densidad del lastre de concreto: Peso Sumergido de Tubería Vacia: Peso Sumergido de Tubería llena: Tipo de suelo: Resistencia al corte no drenada: Resistencia al corte remoldeada: Peso Volumétrico: Máxima= Máxima= To = Sy = Lj = γ= γg = γj = γa = γac = γc γ = Su = Sr = 2 lb/pulg2 88,00 1251,934 ºC 80 ºC 20 60000 lb/pulg2 15 Pulg. 3 63,4 lb/pie 3 53,89 lb/pie 3 9,00 lb/pie 3 120 lb/pie 3 490,5 lb/pie 3 165 lb/pie 209,61 lb/pie 549,38 lb/pie Arcilla 2 100,00 lb/pie 2 30,00 lb/pie 3 90,00 lb/pie TABLA 2. Cálculo de los ciclos de carga. Altura de ola significante 0,25 0,75 1,25 1,75 2,25 2,75 3,25 3,75 4,25 4,75 5,25 5,75 6,25 Periodo 1,9999 2,9999 3,9999 4,9999 5,9999 6,9999 7,9999 8,9999 9,9999 2,9999 3,9999 4,9999 5,9999 6,9999 7,9999 8,9999 9,9999 4,9999 5,9999 6,9999 7,9999 8,9999 9,9999 5,9999 6,9999 7,9999 8,9999 9,9999 5,9999 6,9999 7,9999 8,9999 9,9999 10,9999 7,9999 8,9999 9,9999 10,9999 8,9999 9,9999 10,9999 9,9999 10,9999 9,9999 10,9999 11,9999 10,9999 11,9999 11,9999 11,9999 12,9999 12,9999 Tasa anual de ocurrencia 0,0318 0,1644 0,0190 0,0145 0,0119 0,0030 0,0046 0,0008 0,0001 0,0173 0,0401 0,2797 0,0531 0,0250 0,0189 0,0068 0,0008 0,0212 0,0866 0,0242 0,0282 0,0091 0,0016 0,0042 0,0136 0,0285 0,0160 0,0023 0,0001 0,0009 0,0072 0,0178 0,0027 0,0003 0,0006 0,0107 0,0074 0,0003 0,0004 0,0090 0,0014 0,0021 0,0016 0,0002 0,0021 0,0004 0,0008 0,0009 0,0005 0,0001 0,0001 0,0002 No. de ciclos por año 501447 1728230 149800 91456 62547 13516 18133 2803 315 181864 316156 1764159 279098 112630 74505 23827 2523 133715 455177 109026 111166 31887 5046 22076 61271 112348 56065 7253 526 4055 28383 62372 8515 860 2365 37493 23337 860 1402 28383 4014 6623 4587 631 6021 1051 2294 2365 1314 263 243 485 ** Desplazamiento en el nodo 10 del modelo. Se obtiene en proporción con el desplazamiento que se tiene para una altura de ola H=16,98m que es de 8,64pulg correspondiente a la plataforma ARENQUE-B. Desplazamientro (pulg)** 0,091 0,274 0,457 0,640 0,823 1,006 1,189 1,371 1,554 1,737 1,920 2,103 2,286 TABLA 3. Desplazamientos en el ducto ascendente. Nodos del Ducto Desplazamientos (pulg.) Ascendente Modelo 1 Modelo 2 10 2.2815 2.2814 30 2.2529 2.2529 50 2.0543 2.0543 70 1.7298 1.7299 90 1.0883 1.0882 110 0.4537 0.4576 198 0.3448 0.3783 199 0.3528 0.3783 200 0.3783 0.3783 201 0.3783 0.3783 TABLA 4. Esfuerzos en el ducto ascendente. Nodos del Ducto Ascendente Esfuerzos 2 (Lb/pulg ) Modelo 1 Modelo 2 10 30 3102 3236 3689 3845 50 3173 3748 70 3280 3804 90 3528 3917 110 4597 4491 198 15981 11747 199 12265 8755 200 14018 14461 201 1717 895 TABLA 5. Daño acumulativo por fatiga, ASME ∑r = ∑n Vida, años Nodos Altura, pies 10 234.50 0.000000 **** 30 231.00 0.000000 **** 50 206.50 0.000000 **** 70 166.50 0.000000 **** 90 87.50 0.000000 **** 110 10-50 0.000000 **** 198 1.00 0.005316 188 199 0.50 0.000820 1220 200 0.10 0.016165 62 201 0.00 0.000000 **** I Ni TABLA 6. Daño acumulativo por fatiga, API ∑r = ∑n Nodos Altura, pies 10 234.50 0.000000 **** 30 231.00 0.000000 **** 50 206.50 0.000000 **** 70 166.50 0.000000 **** 90 87.50 0.000000 **** 110 10-50 0.000000 **** 198 1.00 0.003785 264 199 0.50 0.000624 1603 200 0.10 0.010664 94 201 0.00 0.000000 **** I Ni Vida, años Y 10 68 pies 70 79 pies 90 77 pies 110 10.5 pies 200 65 pies Z 300 220 pies 400 40 pies 500 Figura 1. Modelo 2 del ducto ascendente. X 30 20 Altura (mts.) 10 0 -10 -20 -30 -40 -50 0 5000000 10000000 15000000 20000000 25000000 30000000 Rigidez (Lb/pulg) Figura 2. Rigidez de entrepiso, dirección X 30 20 Altura (mts.) 10 0 -10 -20 -30 -40 -50 0 5000000 10000000 15000000 Rigidez (Lb/pulg) Figura 3. Rigidez de entrepiso, dirección Y. 20000000 25000000 Esfuerzo (lb/pulg2) 10000000 1000000 100000 10000 10 100 1000 10000 100000 1000000 Número de ciclos Figura 4. Curva S-N, ASME Esfuerzo (Ksi) 100 10 1 1.E+04 1.E+05 1.E+06 1.E+07 1.E+08 Número de ciclos Figura 4. Curva S-N, API. 1.E+09 1.E+10 Anexo A. Cálculo de la Longitud de Anclaje Natural L = ((πr 2 P ) / f )(1 − 2ν ) + (2 Eαt / Pr )∆T ) donde. L , longitud de anclaje natural, r , radio medio del tubo, P , presión, E , módulo de elasticidad, ν , módulo de Poisson, α , coeficiente de expansión térmica, t , espesor del tubo, ∆T , gradiente de temperatura de instalación a temperatura de operación, f , fuerza de fricción por unidad de longitud, y es igual a: f = π DS u α donde: D , diámetro exterior del tubo, incluyendo lastre, S u , resistencia al corte no drenada, α , coeficiente de transferencia de carga.