- Ninguna Categoria
Jaliesky Domínguez Rodríguez., Vitaly Marrero
Anuncio
Universidad Central “Marta Abreu” de Las Villas FACULTAD DE INGENIERÍA ELÉCTRICA DEPARTAMENTO DE TELECOMUNICACIONES Y ELÉCTRONICA TRABAJO DE DIPLOMA “Metodología de Mantenimiento Preventivo y Correctivo a Equipos de Computación.” Autores: Jaliesky Domínguez Rodríguez Vitaly Marrero Shimkó Tutor: Dr. Ing. Emilio Fco. González Rodríguez Santa Clara 2007 “Año 49 de la Revolución” Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad. _____________ _____________ Firma de los Autores Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada. _____________ Firma del Tutor ______________ Firma del Jefe de Departamento donde se defiende el trabajo ___________________ Firma del Responsable de Información Científico-Técnica iii PENSAMIENTO "La duda es la madre del descubrimiento." Ambrose Bierce iv DEDICATORIA A nuestros padres que siempre nos desearon éxito en la vida, y nos dieron su apoyo incondicional. v AGRADECIMIENTOS • A nuestros padres por guiarnos y apoyarnos en cada momento. • A nuestro tutor Emilio. • A los trabajadores del CDE. • A los trabajadores de COPEXTEL que nos ayudaron. • A nuestros compañeros de estudio que siempre supieron compartir. • A todos nuestros amigos. vi TAREA DE INVESTIGACIÓN • Realizar un estudio de la bibliografía técnica especializada y metodológica sobre el tema. • Definir los objetivos y estructura de las metodologías para los mantenimientos. • Elaborar los contenidos y probar cada metodología. • Crear una página WEB para el Mantenimiento de Equipos de Computación. vii RESUMEN El constante desarrollo de la computación ha tocado todas las aristas de la sociedad cubana actual, por lo que no se concibe una rama de la economía en la que no se aplique y sea una necesidad de vital importancia. Se hace necesario por consiguiente mantener los recursos humanos especialmente encargados del cuidado y mantenimiento de los equipos que componen el bloque computacional, que se forma en las Universidades y Tecnológicos del país. El presente trabajo le brinda al estudiantado de las carreras del perfil Electrónico, de los niveles medio y superior, un material didáctico donde se explica el funcionamiento y los mantenimientos preventivo y correctivo que se le aplican a varios de estos equipos. Se emplea el formato WEB, con el objetivo de que sea ubicado en el sitio de la Facultad de Ingeniería Eléctrica, una vez depurado. viii INDICE PENSAMIENTO .............................................................................................................................iii DEDICATORIA...............................................................................................................................iv AGRADECIMIENTOS .................................................................................................................... v TAREA DE INVESTIGACIÓN ......................................................................................................vi RESUMEN ....................................................................................................................................vii INTRODUCCIÓN ........................................................................................................................... 1 Hipótesis de la investigación ...................................................................................................... 2 Organización del informe ........................................................................................................... 2 CAPÍTULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACIÓN .............................. 3 1.1 RATÓN Y TECLADO.................................................................................................... 3 1.1.1 Ratón ............................................................................................................................. 3 1.1.2 Otras tecnologías de ratones ........................................................................................ 5 1.1.3 Teclado.......................................................................................................................... 9 1.1.3.1 Funcionamiento del teclado.................................................................................. 10 1.1.4 Tecnologías de teclados.............................................................................................. 11 1.2 IMPRESORAS MATRICIALES .......................................................................................... 13 1.2.1 Funcionamiento ........................................................................................................... 14 1.3 SISTEMAS DE ALIMENTACIÓN ININTERRUMPIDOS (SAI) ........................................... 17 1.3.1 Bloques Constructivos de una UPS ............................................................................ 17 1.3.2 Tipos de UPS .............................................................................................................. 18 1.3.3 Funcionamiento de la UPS off-line ............................................................................. 21 1.3.4 Interfaz y Control ......................................................................................................... 22 1.4 FUENTE ATX ..................................................................................................................... 23 1.4.1 Características de la Fuente ATX................................................................................ 23 1.5 UNIDAD CENTRAL DE LAS COMPUTADORAS PERSONALES ..................................... 26 1.5.1 Descripción de un procesador..................................................................................... 26 1.5.2 Procesador Pentium III ................................................................................................ 27 1.5.3 Procesador Pentium IV................................................................................................ 29 1.5.4 Resumen ..................................................................................................................... 30 ix 1.5.5 Chipset ........................................................................................................................ 31 1.5.7 Sistemas de video ....................................................................................................... 34 1.5.8 Discos duros................................................................................................................ 35 1.5.9 Buses y puertos........................................................................................................... 37 1.5.10 Tarjeta madre ............................................................................................................ 38 1.6 MONITORES DE TRC ....................................................................................................... 38 1.6.1 Diagrama de Bloques general ..................................................................................... 38 1.6.2 El Tubo de rayos catódicos (TRC) .............................................................................. 42 1.6.3 El Amplificador de Video ............................................................................................. 43 1.6.4 Circuitos de Sincronismo Horizontal y Vertical............................................................ 45 1.6.4.1 Separador de sincronismos.................................................................................. 45 1.6.4.2 Circuitos detector de modo y corrector de polaridad............................................ 46 1.6.4.3 Circuito generador de barrido vertical .................................................................. 46 1.6.4.4 Circuito generador de barrido horizontal y de alimentación del TRC ................... 47 1.6.5 Fuente de Alimentación............................................................................................... 50 1.6.5.1 Lineales ................................................................................................................ 51 1.6.5.2 Fuentes Conmutadas o de pulso.......................................................................... 52 CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO ........................................ 54 2.1 RATÓN Y TECLADO ......................................................................................................... 54 2.1.1 Mantenimiento Preventivo ........................................................................................... 55 2.1.1.1 Ratón .................................................................................................................... 55 2.1.1.2 Teclado................................................................................................................. 55 2.1.2 Herramienta de diagnóstico para el Ratón y el Teclado.............................................. 55 2.2 IMPRESORAS MATRICIALES .......................................................................................... 57 2.2.1 Mantenimiento Preventivo ........................................................................................... 58 2.2.2 Mantenimiento Correctivo............................................................................................ 58 2.3 SISTEMAS DE ALIMENTACIÓN ININTERRUMPIDOS (SAI) ........................................... 59 2.3.1 Mantenimiento Preventivo ........................................................................................... 60 2.3.2 Mantenimiento Correctivo............................................................................................ 60 2.3.2.1 Defectos comunes en las UPS............................................................................. 60 2.3.2.2 Metodología de reparación de la UPS CENTELA 625A........................................... 61 2.4 FUENTE ATX ..................................................................................................................... 63 x 2.4.2 Mantenimiento Correctivo............................................................................................ 64 2.5 UNIDAD CENTRAL DE LAS COMPUTADORAS PERSONALES ..................................... 65 2.5.1 Mantenimiento Preventivo ........................................................................................... 67 2.5.2 Montaje de un ordenador Pentium IV.......................................................................... 67 2.5.2.1 Tarjeta Madre ....................................................................................................... 67 2.5.2.2 Preparación de la Tarjeta madre .......................................................................... 68 2.5.2.3 Instalación del Microprocesador en la Tarjeta Madre........................................... 68 2.5.2.4 Instalación de la Tarjeta Madre ............................................................................ 69 2.5.2.5 Instalación del Sistema de Enfriamiento ............................................................. 70 2.5.2.6 Instalación de la Memoria RAM............................................................................ 71 2.5.2.7 Instalación del Disco Duro.................................................................................... 72 2.5.2.8 Instalación del Lector de Disco............................................................................. 72 2.5.2.9 Instalación de la Disquetera ................................................................................. 72 2.6 MONITORES DE TRC ....................................................................................................... 73 2.6.1 Mantenimiento Preventivo ........................................................................................... 74 2.6.2 Mantenimiento Correctivo............................................................................................ 74 2.6.2.1 Fuente de alimentación ........................................................................................ 74 2.6.2.2 Circuito de barrido horizontal y generación de la alimentación del TRC .............. 76 2.6.2.3 Circuito de barrido vertical.................................................................................... 79 2.6.2.4 Amplificador de video ........................................................................................... 80 2.6.2.5 TRC ...................................................................................................................... 81 2.6.3 Teoría de operación del procesador Horizontal y Vertical TDA 4855/ TDA 4858 ....... 82 CAPITULO 3. PAGINA WEB SOBRE MANTENIMIENTO........................................................... 84 CONCLUSIONES Y RECOMENDACIONES ............................................................................... 86 REFERENCIAS BIBLIOGRÁFICAS............................................................................................. 87 ANEXOS ...................................................................................................................................... 88 INTRODUCCIÓN 1 INTRODUCCIÓN Desde hace varios años, la computación ha alcanzado un lugar preponderante en el desarrollo de la vida social y económica de cualquier país y Cuba no escapa a esta realidad. El gobierno cubano ha tomado muy en serio la tarea de llevar la informatización a todos los rincones de nuestra isla. Son muchos los modelos y accesorios de equipos de computación que se han adquirido y/o elaborado y se encuentran en la educación, la industria, la salud, los servicios y otros. A lo largo de estos últimos años, el desarrollo de la computación ha sido vertiginoso y progresivamente ascendente y esto reclama la superación constante del personal dedicado a su mantenimiento, para incrementar la competitividad de su trabajo. En el caso particular de la Universidad Central de Las Villas (UCLV), la labor de mantenimiento de los equipos de computación se lleva a cabo en lo fundamental en el Centro de Desarrollo Electrónico (CDE) y en las prioridades de su dirección, se encuentra la de adiestrar eficazmente a los alumnos que realizan sus prácticas en el centro, para lo cual se trabaja en la confección de una metodología para ejecutar el mantenimiento preventivo y correctivo con la Calidad requerida. El objetivo general del presente trabajo consiste en elaborar una guía teórico-práctica para el mantenimiento a los equipos de Computación. Los objetivos específicos son los siguientes: Recopilar la información científico-técnica sobre el tema. Detallar las características del funcionamiento de los equipos. Elaborar una guía metodológica para los mantenimientos preventivos y correctivos. Confeccionar una página WEB sobre mantenimiento. INTRODUCCIÓN 2 Hipótesis de la investigación El estudio le facilitará al estudiante que comienza sus prácticas laborales un material que le permita conocer el funcionamiento y los procedimientos para el mantenimiento a varios de los equipos de computación. Organización del informe El Capítulo 1 nombrado “Funcionamiento de los Equipos de Computación”, aborda lo referente a la manera en que trabajan algunos de los principales equipos que forman parte del bloque computacional y se tratarán en total siete clases de equipos (Ratón, Teclado, Impresoras Matriciales, UPS, Fuente ATX, Unidad Central y Monitores TRC). El Capítulo 2, “Mantenimientos Preventivo y Correctivo”, se refiere a la metodología y las herramientas necesarias para realizar satisfactoriamente el mantenimiento de los equipos que se abordan. El Capítulo 3, nombrado “Página WEB sobre Mantenimiento”, se trata la forma de interactuar con las opciones que aparecen en ella, así como la información que encontrará el usuario en cada enlace. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 3 CAPÍTULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACIÓN En este capítulo se estudia el funcionamiento de varios equipos y accesorios que conforman el bloque computacional. Específicamente se trataran 7 clases de equipos, a saber, Ratón, Teclado, Impresoras Matriciales, Fuentes de Alimentación UPS, Fuentes ATX, Unidades Centrales y Monitores TRC. El principal objetivo del presente capítulo es dar una panorámica del funcionamiento y de su estado actual. 1.1 RATÓN Y TECLADO En este epígrafe se abordan dos componentes de entrada directamente relacionados con la interacción entre el usuario y la Personal Computer (PC), el ratón y el teclado. Se trata de dos dispositivos con una función específica y con un diseño no muy complejo, pero imprescindibles para interactuar con una PC. 1.1.1 Ratón Fue en 1973 con el sistema Alto de Xerox cuando se utilizó el primer ratón para sacar provecho a la primera interfaz gráfica, que ya se había presentado en 1968. En 1984 con la introducción del ordenador personal Macintosh el ratón empezó a popularizarse, alcanzando un éxito rotundo y redefiniendo completamente la forma en que se usan los ordenadores. El ratón se presenta como un dispositivo simple, pero realmente eficiente. Las aplicaciones actuales están sumamente orientadas al uso del ratón, pues un elevado porcentaje de las acciones que se realizan con una PC se desencadenan mediante unos simples movimientos y pulsaciones realizados con este dispositivo. Su misión principal consiste en señalar puntos concretos de la interfaz de usuario de los programas, al convertir los movimientos de la mano que desliza el ratón sobre una superficie plana, en la información digital que el ordenador puede procesar. Dicha información se convierte en el movimiento de un puntero en la pantalla, que refleja el movimiento de la mano. Está integrado por una esfera de material plástico, que establece contacto con la superficie sobre la que se desliza, usualmente una alfombrilla con una cubierta plástica, como se puede apreciar en la figura1.1.1a en la parte señalada con (a). Cuando el usuario desplaza el ratón, la esfera rueda y hace girar los dos pequeños rodillos (b) que se encuentran en contacto con ella. Uno de los rodillos reacciona al desplazamiento en la dirección X (horizontal), mientras que el otro detecta el desplazamiento en la dirección Y (vertical). CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 4 Cualquier desplazamiento del ratón se puede entender como la combinación de los desplazamientos horizontal y vertical y por ello los ejes de giro de los rodillos forman un ángulo de 90 grados. Fig1.1.1a Sistema de movimiento del ratón de esfera Cada rodillo se conecta a un eje que hace girar un disco (c), también de la figura1.1.1a. Cada disco presenta perforaciones en su superficie, formando ventanas distribuidas uniformemente. En un lado de cada disco se halla un diodo emisor de infrarrojos (LED de infrarrojos), mientras que en el lado opuesto se encuentra el sensor de infrarrojos (d). Cuando el usuario mueve el ratón, los discos giran y al desplazarse las perforaciones por delante del LED emisor, se alterna luz y oscuridad en el lado del sensor, es decir, que se producen pulsos de luz que se convierten en pulsos eléctricos. La señal resultante determina claramente el número de pulsos detectados durante cada período de monitorización y esto permite calcular la velocidad y la longitud del desplazamiento en cada dirección. Determinación del desplazamiento del ratón. Con la configuración explicada hasta ahora, se puede detectar la distancia recorrida y la velocidad, pero no el sentido del movimiento. Una de las soluciones para resolver este problema es añadir a cada disco un nuevo par emisor-sensor situado justamente en el otro extremo del disco, de tal forma que ambos sensores vean pulsos de luz al mismo tiempo. Fig1.1.1b Determinación del movimiento del ratón CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 5 Entre el disco y cada sensor se coloca una pieza de plástico que presenta una perforación y actúa como una ventana para determinar lo que cada sensor puede ver. La perforación en uno de los sensores se coloca ligeramente más alta que en el otro sensor y esto se hace de modo que, cuando un sensor detecta un pulso de luz, el otro está en estado de transición, de luz a oscuridad, o viceversa. El proceso ilustrado en la figura1.1.1b consiste en centrarse solamente en uno de los sensores (por ejemplo, el sensor A). Cuando se detecta un pulso de luz en A, se observa el tipo de transición que ocurre en el sensor B, pocos instantes después. Si se gira en sentido antihorario, se aprecia que B pasará de luz a oscuridad (pulso negativo). En cambio, si se gira en sentido horario, la señal B pasará de oscuridad a luz (pulso positivo). Visto de otro modo, las dos señales producidas son iguales, pero aparecen con un cierto retardo de tiempo entre ellas y de acuerdo cuál de las dos señales se retarda respecto a la otra, se tiene uno u otro sentido. Este es uno de los métodos para determinar el sentido, pero no el único. Un procesador, incluido en el ratón, lee los pulsos y los traduce a información digital, que resulta fácil de procesar por parte del PC. Esta información se envía en formato serie, a través del cable.Existen dos o tres botones en el ratón y su estado se incluye en la información enviada al PC. En el ámbito de los conectores, la mayoría de ratones se comunican con la PC mediante la interfaz PS/2 o conectores para el puerto serie DB-9. Independientemente del tipo de conector, el ratón envía al PC tres bytes de información en formato serie, a una velocidad de hasta 1.200 bps, que es aproximadamente 40 veces por segundo. El primer byte contiene la siguiente información; estado de los botones izquierdo y derecho, sentido del movimiento en ambas direcciones (X y Y) y la información de desbordamiento en las direcciones X y Y. Los siguientes 2 bytes contienen, respectivamente, el movimiento en las direcciones X y Y. En otras palabras, estos dos bytes contienen el número de pulsos detectados en cada dirección desde la última vez que se envió información al PC. Si el ratón se desliza muy rápido, es posible que se cuenten más de 255 pulsos en cualquiera de las direcciones, y de ahí la inclusión de indicadores de desbordamiento. 1.1.2 Otras tecnologías de ratones Ratón óptico La firma Agilent Technologies desarrolló en 1999 un tipo de ratón realmente innovador, al que se denominó "ratón óptico". Esta tecnología ha demostrado ser realmente eficaz y en consecuencia, goza actualmente de una gran aceptación. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 6 El ratón óptico de la figura 1.1.2a es básicamente, una pequeña cámara que toma unas 1.500 imágenes por segundo y un software de procesamiento digital de imagen en tiempo real. Fig1.1.2a Ratón óptico Se incorpora un diodo emisor de luz (LED) que ilumina la superficie sobre la que se arrastra el ratón. La cámara captura imágenes de la superficie y las envía a un procesador digital de señales (PDS), operando con un rendimiento muy elevado (18 millones de instrucciones por segundo). El software que se ejecuta sobre el PDS es capaz de detectar patrones sobre cada imagen recibida. Estudiando como se desplazan dichos patrones en las imágenes sucesivas, el PDS averigua el desplazamiento y la velocidad. Esta información se envía al PC cientos de veces por segundo, lo que ofrece una confortable sensación de continuidad para el usuario. Los ratones ópticos reportan varios beneficios con relación a los convencionales. En primer lugar, la ausencia de componentes móviles como esfera y discos reduce considerablemente la probabilidad de fallos. Tampoco hay que olvidar que, en los ratones convencionales, la suciedad presente en la superficie de desplazamiento penetra en el interior del ratón con gran facilidad y esto provoca interferencias en los sensores, algo que no ocurre en los ratones ópticos. Otra ventaja radica en que, en los ratones ópticos, el seguimiento de los movimientos del ratón se realiza a mayor velocidad, obteniendo en la pantalla un movimiento más continuo. Finalmente, es importante recalcar que los ratones ópticos no requieren del uso de una superficie especial, pues en realidad pueden trabajar prácticamente sobre cualquier superficie. Ratón inalámbrico El ratón inalámbrico de la figura 1.1.2b, básicamente, se trata de un ratón convencional, en el cual se ha sustituido el cable de comunicación con la PC por un enlace de radiofrecuencia o infrarrojos. La ventaja radica en que el ratón se puede mover y cambiar de lugar con gran comodidad, ya que no hay un cable que haga difícil dicha tarea. Sin embargo, este tipo de ratón es sensible a CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 7 señales electromagnéticas y esto podría conducir a problemas en entornos con un alto nivel de interferencias. Fig1.1.2b Ratón inalámbrico Footmouse Una opción poco común pero práctica es lo que se denomina footmouse de la figura 1.1.2c. Se trata, en este caso, de un ratón controlado por el pie, en lugar de la mano. La ventaja principal radica en que el teclado se puede usar sin limitaciones, es decir, con ambas manos, mientras se emplea el ratón. Fig1.1.2c Footmouse Además, puede ser de gran utilidad para muchas personas con cualquier tipo de minusvalía en las extremidades superiores. Tecnología Glidepoint Una tecnología muy utilizada en los ordenadores portátiles es la denominada Glidepoint, mostrado en la figura 1.1.2d. Se trata de una pequeña superficie rectangular, donde el usuario desplaza el dedo y el ratón se mueve de forma acorde en la pantalla. Si el usuario desea hacer clic o doble clic, lo puede hacer directamente sobre la superficie, mediante ligeras pulsaciones. Además, se suele disponer de los dos botones típicos del ratón, para los usuarios que desean emplear el método tradicional. Normalmente, los bordes inferior y lateral de la superficie permiten CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 8 controlar cómodamente las barras de desplazamiento típicas de las aplicaciones para Windows. Como inconveniente, si los dedos del usuario se encuentran húmedos, este tipo de ratón no funcionara correctamente. Fig1.1.2d Glidepoint El sistema Intellimouse Otra tecnología de gran aceptación, lanzada por Microsoft en 1996, es la conocida como Intellimouse, se observa en la figura 1.1.2e, que consiste en la introducción de una pequeña rueda, que el usuario puede desplazar en ambos sentidos y que además se puede presionar como un botón más. Fig1.1.2e Intellimouse El desplazamiento de la rueda permite gobernar cómodamente las barras de desplazamiento de Windows. La función asociada a la pulsación de la rueda suele ser programable, asignando tareas como copiar, pegar y otras. Ratones trackball Finalmente, cabe resaltar la existencia de los ratones denominados trackball, como en la figura 1.1.2f. Básicamente, se trata de un ratón convencional, pero en este caso la esfera no se mueve como consecuencia del roce con la superficie, sino que es accionada directamente por el usuario y por tanto, ya no es necesario mover el ratón. En la parte superior se encuentran la esfera al alcance del dedo pulgar del usuario y los botones. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 9 Fig1.1.2f Ratón trackball . Además, no es necesario adquirir una alfombrilla, porque no hay necesidad de desplazamiento, el ratón requiere poco espacio libre en el área de trabajo. Como se puede intuir, no existe una versión óptica de los ratones trackball. 1.1.3 Teclado El teclado es un conjunto de interruptores teclas, que se hallan conectados a un microprocesador. Este último vigila el estado de los interruptores, y responde de forma específica ante cualquier cambio de estado. Los teclados suelen incorporar cuatro tipos de teclas; de escritura, de función, de control y de teclado numérico o keypad. Las teclas de escritura se suelen organizar en formato QWERTY (son las seis primeras letras que aparecen en este arreglo). La disposición de teclas es justamente la que podemos encontrar en una máquina de escribir. Teclado numérico El teclado numérico (con un total de 17 teclas) facilita enormemente la introducción de dígitos, operadores matemáticos elementales, punto decimal y otros. La disposición es la que se encuentra en multitud de calculadoras, lo que hace su uso más familiar. Teclas de función Las teclas de función, dispuestas en una fila en la parte superior del teclado, permiten que los programas o el sistema operativo les asignen comandos específicos. Por ejemplo, a la tecla F1 se le suele asignar el comando "mostrar ayuda", casi de forma estándar. Teclas de control Finalmente, las teclas de control facilitan las funciones de edición en la pantalla como: inicio, fin, insertar, eliminar, escape etc y ofrecen cursores para desplazarse en la pantalla. En el caso CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 10 particular de los teclados diseñados para Windows, aparecen nuevas teclas de control, como "menú inicio" o "menú de contexto”. 1.1.3.1 Funcionamiento del teclado Las teclas se hallan ligadas a una matriz de circuitos o matriz de teclas de dos dimensiones. Cada tecla, en su estado normal (no presionada) mantiene abierto un determinado circuito. Al presionar una tecla, el circuito asociado se cierra y por tanto, circula una pequeña cantidad de corriente. El microprocesador detecta los circuitos que han sido cerrados e identifica en que parte de la matriz se encuentran, mediante la asignación del par de coordenadas x, y. Fig1.1.3.1 Matriz de teclas La Figura1.1.3.1 muestra el aspecto físico y el esquema de una matriz de teclas. Si se presiona la tecla resaltada en rojo, la corriente fluirá desde F1 hacia C1. El microprocesador identifica la tecla con las coordenadas (1,1), o lo que es lo mismo, fila 1 y columna 1. Si se presiona la tecla resaltada en azul, las coordenadas son (3,2). Acto seguido, se acude a la memoria ROM del teclado, que almacena lo que se denomina "mapa de caracteres". Dicho mapa no es más que una tabla que asigna un caracter a cada par (x, y). También se almacena el significado de pulsar varias teclas simultáneamente. Por ejemplo, a la tecla etiquetada como "T" se le asigna el caracter "t", pero si se pulsa SHIFT +T, se asigna "T". Los teclados permiten que la computadora asigne un nuevo mapa de caracteres, permitiendo crear teclados para multitud de lenguajes. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 11 El efecto rebote Como interruptores, las teclas padecen del conocido "efecto rebote". Cuando una tecla se presiona, se produce una cierta vibración, que equivale a presionar y soltar la tecla repetidas veces, muy rápidamente y una de las misiones del procesador del teclado es eliminar este fenómeno. Cuando el procesador detecta que una tecla cambia de estado con una frecuencia excesiva (mayor que la que un humano puede generar al usar normalmente el teclado), interpreta el conjunto de rebotes como una simple pulsación. Sin embargo, si se mantiene pulsada la tecla más tiempo, el procesador detecta que los rebotes desaparecen e interpreta que se envía el mismo caracter al PC repetidas veces. La frecuencia con la cual se envía el caracter repetido al PC se puede establecer por software, concretamente desde el sistema operativo. 1.1.4 Tecnologías de teclados Teclas de cúpula de goma En la actualidad, los teclados más populares emplean teclas de "cúpula de goma". Las teclas reposan sobre una cúpula fabricada en goma, de pequeño tamaño y gran flexibilidad, con un centro rígido de carbono. Fig1.1.4a Cúpulas de goma Cuando se realiza una pulsación, la pieza colocada bajo la superficie de la tecla hunde la cúpula y esto hace que el centro de carbono se hunda también, hasta tocar una pieza metálica situada en la matriz de circuitos. Mientras la tecla permanezca pulsada, el centro de carbono cerrará el circuito apropiado. Cuando la tecla se libera, la cúpula de goma vuelve a su posición original, y el centro de carbono deja de cerrar el circuito asociado a la tecla. Como consecuencia, la tecla también vuelve a su posición original, quedando lista para volver a ser presionada. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 12 Estos teclados resultan económicos y además, presentan una excelente respuesta táctil. Otra ventaja se centra en su gran resistencia al polvo y a la suciedad, ya que las cúpulas de goma aíslan los interruptores. La figura 1.1.4a muestra un teclado de este tipo. Teclados de membrana Los teclados de membrana se asemejan a los de cúpula de goma en su forma de operar; sin embargo, en lugar de emplear una cúpula de goma independiente para cada tecla, se basan en una única pieza de goma, que cubre todo el teclado y contiene un abombamiento para cada tecla. Estos teclados no se encuentran con facilidad en el mundo de los ordenadores personales, ya que ofrecen una respuesta táctil inapropiada. En cambio, gracias al gran aislamiento al que se somete la matriz de circuitos, estos teclados se emplean habitualmente en sistemas sometidos a condiciones extremas. Teclados capacitivos Pasando a una tecnología no mecánica se encuentran los teclados capacitivos, donde los interruptores no son realmente mecánicos y de hecho, la corriente fluye continuamente por toda la matriz de teclas. Cada tecla está provista de un muelle, que asegura el retorno a su posición original tras una pulsación. Bajo la superficie de cada tecla se halla una pequeña placa metálica y debajo de dicha placa, a una cierta distancia, se halla otra nueva placa metálica. El conjunto de dos placas metálicas separadas por el material dieléctrico aire no es más que un condensador, cuya capacidad varía en función de la distancia entre las placas. Por tanto, al pulsar la tecla y por tanto acercar las placas, se produce un cambio de capacidad que sirve para detectar la pulsación de la tecla. El costo de estos teclados es elevado pero, por otro lado, se deterioran muy poco. Esto último les permite gozar de una larga vida, mayor que la ofrecida por cualquier otra tecnología de teclados. Ya que las dos placas nunca entran en contacto directo y no existen rebotes, lo que supone otra ventaja importante. La tecnología de contacto metálico Otra tecnología más simple es la de contacto metálico. En ella, las teclas se dotan de un resorte, y cada circuito se cierra por el contacto directo entre dos placas metálicas. Otra variante introduce un material esponjoso entre las dos placas. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 13 En general, esta tecnología proporciona una buena respuesta táctil. El problema reside en que los contactos se deterioran rápidamente, ya que no existe una barrera aislante que proteja la matriz de contactos, como en los teclados de membrana o en los de cúpula de goma. Teclados ergonómicos. Los conocidos teclados ergonómicos tienen como objetivo proporcionar un medio cómodo para teclear, haciendo que manos, muñecas y antebrazos se coloquen en una posición relajada, con respecto a los teclados convencionales.Algunos estudios revelan que el uso del teclado en un modo inapropiado puede derivar en lesiones como la tendinitis. Fig1.1.4b Teclado ergonómico El teclado queda dividido en dos grupos de teclas, que se disponen formando un cierto ángulo y de esta manera, los codos reposan en una posición mucho más natural que la usual. También se suele añadir un reposa muñecas y se aplica una cierta curvatura al teclado. Hay que remarcar que el uso de estos teclados implica un cierto período de familiarización con la nueva organización de teclas. En general, el usuario suele adaptarse en poco tiempo, gozando después incluso de mayor velocidad de escritura y menor cansancio en sus manos. 1.2 IMPRESORAS MATRICIALES Las impresoras matriciales fueron las primeras que surgieron en el mercado y aunque han perdido terreno últimamente frente a las de inyección de tinta y láser, siguen siendo las únicas que pueden imprimir formularios continuos, lo que las hace una opción válida para locales comerciales que necesitan imprimir facturas. Según como sea el cabezal de impresión, se dividen en dos grupos principales, de margarita y de agujas. Las de margarita incorporan una esfera metálica en la que están en relieve las diversas letras y símbolos a imprimir, la esfera pivotea sobre un soporte móvil y golpea a la cinta de tinta, con lo cual se imprime la letra correspondiente. El método es absolutamente el mismo que se usa en muchas máquinas de escribir eléctricas y lo único que las diferencia es la carencia de teclado. Las impresoras de margarita están en completo desuso debido CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 14 a que sólo son capaces de escribir texto; además, para cambiar de tipo o tamaño de letra se debe cambiar la matriz de impresión o esfera. Las de agujas son las que imprimen caracteres compuestos por puntos empleando un cabezal de impresión formado por agujas accionadas electromagnéticamente, prácticamente igual a una máquina de escribir y fueron las primeras en salir al mercado. Los parámetros principales de calidad de la impresión de una del tipo matricial son el número de puntos de la matriz de agujas y su velocidad. Por lo general, las impresoras matriciales se clasifican por el número de agujas del cabezal de impresión dispuestas en forma de rectángulo. Normalmente son de 9 y se emplean frecuentemente para imprimir reportes y materiales donde la calidad no es muy importante, o también de 24 que permite mayor nitidez. Algunas agujas están desalineadas en los extremos, para marcar comas. 1.2.1 Funcionamiento Este tipo de impresora es de impresión bidireccional, ya que lo realizan en el desplazamiento hacia la derecha. Es una impresora por impacto, si una aguja es impulsada hacia afuera del cabezal por un mecanismo basado en un electroimán impacta una cinta entintada y luego retrocede a su posición de reposo merced a un resorte. La cinta sobre la zona de papel a imprimir al ser impactada por una aguja, le transfiere un punto de su tinta al papel. Así, una aguja de 0,2 mm de diámetro genera un punto de 0,25 rnm de diámetro. Si bien las agujas en el frente del cabezal están paralelas y muy próximas, se van separando y curvando hacia la parte posterior del cabezal, terminando en piezas plásticas como porciones de una pizza, que forman un círculo. De esta forma el cabezal puede alojar cada electroimán que impulsa cada aguja. Estas agujas terminan en una pieza plástica de forma de sector circular, que tiene adosada un imán cilíndrico y este imán puede desplazarse dentro de un arrollamiento de alambre que lo rodea, si se hace circular por este una corriente eléctrica, la cual produce en sus extremos dos polos magnéticos que atraen al imán. Entonces, el desplazamiento del imán hará que la pieza plástica citada pivotee, impulsando la aguja hacia la cinta, a la par que se contrae un resorte que rodea la aguja. Al cesar la circulación de corriente, el imán deja de estar atrapado por el arrollamiento, por lo que el resorte recupera su posición normal y su estiramiento hace que la aguja vuelva a su posición de reposo. El funcionamiento de la impresora es manejado por un microprocesador que ejecuta el programa que está en la memoria de la impresora. También en la ROM (Read only memory) están contenidas CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 15 las matrices de puntos que conforman cada caracter a imprimir y de distintos tipos (Roman, Sans Serif y otros). Esta forma de almacenar cada letra mediante un mapa o matriz de unos y ceros, que definen una matriz de puntos (representados por los unos) preestablecidos se conoce como tipos de letra fuentes "bit map". Cada letra se caracteriza por una matriz particular, que es única para cada estilo de letra y tamaño. Muchas impresoras presentan además una memoria RAM para definir matrices de otras tipografías no incorporadas. La operatoria en modo texto es la siguiente. Desde la memoria llegan al puerto de la impresora, byte por byte, caracteres codificados en ASCII para ser impresos y un código acerca del tipo y estilo de cada caracter. Cada uno será transferido a través del cable de conexión al buffer RAM de la impresora de 8 KB, donde se almacenan. Según la fuente y el código ASCII de cada caracter a imprimir, el microprocesador de la impresora localiza en la memoria ROM, la matriz de puntos que le corresponde. Luego, este procesador también ejecutando programas que están en la ROM determina: • Los caracteres (matrices de puntos) que entrarán en la línea a imprimir. • El movimiento óptimo del cabezal de impresión, a la derecha o a la izquierda, en función de la posición donde este se halla en cada momento. • Las agujas que se deben disparar en cada posición del cabezal, para imprimir la línea vertical de puntos que forma la matriz de un caracter en el papel. Cuando se imprime una línea, el cabezal es acelerado hasta alcanzar una cierta velocidad y es desplazado en forma rectilínea hacia la derecha o la izquierda, enfrentando al papel para formar líneas de puntos verticales en este y entre ambos se mueve lentamente la cinta entintada. Cada 0,2 mm o menos, según la resolución, (en correspondencia con cada milisegundo, o menos) del recorrido del cabezal, se disparan sobre la cinta las agujas que correspondan según la porción del caracter que se está imprimiendo. En el espacio entre dos caracteres no se dispara ninguna aguja. De esta forma, el cabezal va imprimiendo columnas de puntos, que van formando una línea de caracteres o puntos, que forman parte de un dibujo o letras (en modo gráfico). Luego de imprimir una línea, el mecanismo de arrastre del papel hace que este se desplace verticalmente. Las impresoras de matriz de agujas son especialmente útiles para imprimir varias copias usando papel carbónico y papel con perforaciones laterales para ser arrastrado con seguridad, pudiendo CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 16 adquirirse con carro ancho. Estas posibilidades y su bajo costo, las hace indispensables para muchos usos comerciales. Así mismo, el costo por página es muy bajo y su vida útil es larga (entre 3 y 6 años). El hecho de ser impresoras por impacto, las hace ruidosas, inconveniente mejorado últimamente. Otra desventaja que tienen es su baja velocidad. Una resolución típica puede ser 120x72 dpi (dot per inch, o sea, puntos por pulgada). Ello implica que en sentido horizontal y vertical se tienen 120 y 70 puntos por pulgada, respectivamente. Los 120 dpi se deben a que el cabezal se dispara cada 1/120 de pulgada (unos 0,15 mm) en su movimiento horizontal. También puede elegirse 60 dpi y 240 dpi. Con 240 dpi, dada la velocidad de disparo requerida, una misma aguja (por su inercia mecánica) podría no dispararse dos veces sucesivas. En tal caso, primero se imprimen las columnas pares que componen un renglón, y en una segunda pasada, las impares, desfasando el cabezal 1/240 de pulgada. Los 70 dpi de resolución vertical suponen que entre dos agujas existe una separación de 1/70 de pulgada (0,35 mm), pero este valor puede mejorarse con técnicas semejantes a las descritas para la resolución horizontal También la resolución depende del diámetro de las agujas, para obtener puntos más pequeños. En estas impresoras, los gráficos no salen muy bien y tardan mucho,.lo cual ocurre porque en el modo gráfico se le deben enviar al buffer de la impresora los bytes que indican cuales agujas deben dispararse en cada posición del cabezal. En cambio cuando se imprime texto, solo debe enviarse el código ASCII de los caracteres a imprimir, ya que en la memoria de su microprocesador está tabulado cuales son las agujas que se deben disparar para formar cada uno de esos caracteres. Las principales ventajas de esta tecnología son las siguientes: • Su capacidad de obtener copias múltiples e imprimir formularios continuos. • Su velocidad en texto es de las más elevadas • Su costo y mantenimiento es de los más bajos que hoy ofrece el mercado. Como contrapartida sus inconvenientes son: • El ruido ciertamente elevado y la incapacidad de manejar color o varios tipos de fuentes. En general, las impresoras matriciales de agujas se posicionan como impresoras de precio reducido, calidad media-baja, escaso mantenimiento y alta capacidad de impresión. El fabricante más importante de este tipo de impresoras es la firma Epson, con diversos modelos y precios. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 17 1.3 SISTEMAS DE ALIMENTACIÓN ININTERRUMPIDOS (SAI) Un SAI o Sistema de Alimentación Ininterrumpida, en inglés UPS (Uninterrumpible Power Supply), es un equipo electrónico capaz de minimizar los riesgos que se pueden derivar de una alimentación eléctrica comercial inestable. Su función es la de corregir las disfunciones de la tensión alterna suministrada por las compañías eléctricas. Las circunstancias que ocasionan este error de suministro se pueden resumir en: fenómenos naturales, fenómenos mecánicos, fenómenos eléctricos y errores humanos. El UPS contiene una batería que generalmente está cargándose constantemente para mantener la capacidad máxima. Cuando hay una disminución o una sobrecarga de la tensión, el UPS inmediatamente (en 1 o 2 milisegundos) reemplaza la energía que estaba usando por la de las baterías. En caso de un corte de tensión es capaz de mantener funcionando su instalación informática generando energía instantáneamente durante un tiempo aproximado de 10 a 20 min. Un Sistema de Alimentación Ininterrumpida ofrece diferentes niveles de protección frente a cortes, micro cortes, subidas y bajadas (mediante un estabilizador), picos (gracias a los MOV) y armónicos de la tensión eléctrica(a través de un filtro EMI/RFI), así como de picos transitorios en la línea telefónica cuando se emplean módems. Evita que se quemen las PC´s y/o los Periféricos, el envejecimiento progresivo del hardware por fatiga y sobrecalentamiento de sus componentes, la pérdida de datos y tiempo/dinero en reparaciones costosas. 1.3.1 Bloques Constructivos de una UPS • Entrada: La sección de entrada es la forma en que la tensión de la línea es conectada a la UPS. Puede ser un cable incorporado, un cable enchufable o una bornera con terminales. • Batería: Necesaria para mantener funcionando a la UPS cuando la energía de la línea falla o cae demasiado. Normalmente las UPS de pequeña potencia utilizan baterías internas selladas, libres de mantenimiento. En grandes UPS se emplean baterías de electrolito líquido. • Conmutador: En una UPS On-Line un conmutador mecánico o estático es usado como parte del circuito automático o manual de by-pass. En una UPS Off-Line, un conmutador mecánico o relé es usado para conmutar la carga a la salida del inversor, cuando falla la línea de alimentación. • Comunicación: Permite un monitoreo remoto del funcionamiento de la UPS, el estado de la línea de alimentación y las baterías entre otros, así como la posibilidad de realizar un CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 18 cierre ordenado del sistema. El uso de las comunicaciones vía RS-232, protocolos TCP/IP, y SNMP, es muy común en las UPS actuales. • Controles: La mayoría de los equipos UPS operan de manera automática. Tienen una alarma sonora y/o lumínica indicadora de la falla de línea y batería y un panel de control relativamente sencillo. • Estabilizador: Una UPS con un sistema de regulación de tensión de entrada o estabilizador es conocida como UPS Interactiva. El estabilizador de tensión es utilizado para mantener el voltaje de entrada dentro de los límites aceptables para la carga, cuando la tensión de la línea disminuye o se eleva fuera de un intervalo predeterminado. • Transformador: Normalmente no se necesita usar un transformador de aislamiento, pero es necesario en algunos tipos de diseño. Reduce el voltaje de entrada a 12v ó 24v según el modelo para cargar la batería y eleva la salida del inversor a 110v para alimentar la carga. 1.3.2 Tipos de UPS La mayoría de las configuraciones utilizan solamente estos bloques y hay dos grandes categorías principales, On-Line y Off-Line. La mayoría de las configuraciones entra en la categoría Off-Line debido fundamentalmente a su menor costo. On -Line: Si el 100% de la corriente de la carga es normal y permanentemente suministrado por el inversor la UPS es del tipo On-Line. Off-Line: Si la corriente de la carga es normalmente suministrada directamente por la línea, la UPS es del tipo Off-Line. Fig1.3.2a UPS on-line/Funcionamiento en modo línea normal CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 19 Fig1.3.2b UPS on-line/Funcionamiento en modo baterías Fig1.3.2c UPS on-line/Funcionamiento en modo BYPASS En las figuras 1.3.2 a, b y c se muestran los diagramas de la UPS on-line en funcionamiento en los modos normal, con baterías y BYPASS respectivamente. En las figuras 1.3.2d y e se muestra el funcionamiento de la UPS off-Line en modo normal y modo baterías. Una importante mejora a la UPS tipo off-line fue agregarle un regulador de tensión de entrada (estabilizador), constituido por un transformador con derivaciones seleccionables, figura 1.3.2f. El estabilizador de tensión a la entrada del sistema permite operarlo en "Modo Normal" cuando se CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 20 producen caídas ó sobre elevaciones en la tensión de línea, sin que sea necesario conmutar al Modo Batería. Fig1.3.2d UPS off-line/Funcionamiento en modo normal Fig1.3.2e UPS off-line/Funcionamiento en modo baterías Fig1.3.2f UPS Interactiva/Funcionamiento con red normal CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 21 1.3.3 Funcionamiento de la UPS off-line Modo normal: En el modo normal de operación de la figura 1.3.3a, o sea, trabajando con corriente alterna AC, el voltaje de alimentación es de un nivel tal que no es necesario que el Inversor entre a funcionar y por tanto, el voltaje de Entrada pasa por el filtro supresor de transiciones y después energiza la carga a través del conmutador de Transferencia, el cual está Normalmente cerrado tomando en cuenta que es un relevador. La corriente fluye desde la Entrada y hacia la carga y una pequeña cantidad de corriente es rectificada por el cargador de baterías y utilizada para mantener la batería en flotación o carga. El Inversor se encuentra apagado en stand-by. Fig1.3.3a Funcionamiento en modo normal Modo Baterías: Cuando el voltaje de alimentación del UPS se sale del intervalo predeterminado de operación, pasa al Modo Baterías o Inversor, como en la figura 1.3.3b. El voltaje de entrada tiene una ventana aceptable de operación que suele ser de un +/-15% aproximadamente y este se escoge tomando en cuenta el voltaje adecuado para alimentar la carga. Siendo el voltaje nominal de 120 volts, el intervalo va desde 102 volts y hasta 138 volts y dentro de esos valores, la UPS entrega ese mismo voltaje a la salida, solamente acondicionado por el Filtro. Si el voltaje de Entrada es menor a 102 volts o mayor a 138 volts, entonces su Control enciende inmediatamente el Inversor y al mismo tiempo manda a energizar el relevador de transferencia. Cuando el relevador conmuta, el Inversor ya está encendido y listo para energizar la carga. El voltaje del Inversor es regulado y entrega un valor de 120 VCA +/-3% a 60 Hz, donde la frecuencia es controlada por un cristal, aún y cuando inicialmente el voltaje de las baterías comienza en unos 14.0 volts y cuando la batería está totalmente descargada el voltaje es de 10.5 volts. Para el caso que la batería del UPS sea solamente una de 12 volts. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 22 Fig1.3.3b Funcionamiento en modo inversor Regreso a operación normal: Una vez que el voltaje regresa a los límites permitidos, el conmutador de transferencia o relevador de transferencia se desenergiza y la UPS regresa a su operación Normal donde la carga es nuevamente alimentada por el voltaje de Entrada. El Inversor se apaga al mismo tiempo y la batería se comienza a recargar hasta que llegue nuevamente a su estado de cargada al 100%. El tiempo que tarde en recargarse al 100% depende del tiempo que el equipo duró en Modo Inversor y generalmente es de 10 veces el tiempo de la descarga, es decir, si la UPS estuvo por 5 minutos, la batería estará casi totalmente recargada en unos 50 minutos, aunque esto varía un poco con el fabricante. En la Tabla 1.3.3 se listan sus ventajas y desventajas VENTAJAS DESVENTAJAS -Es muy económico -No tiene regulación de frecuencia. -Consume muy poca energía -La protección a la carga es limitada. -La vida de la batería es corta (de 2 a 4 años) -Es ligero -Hay una interrupción en el voltaje de 4 a 10 -Es el más adecuado para el usuario personal milisegundos cuando se pasa al modo inversor. -La forma de onda cuasisenoidal no es compatible para todo tipo de cargas. Tabla 1.3.3 Ventajas y desventajas de la UPS off-line 1.3.4 Interfaz y Control Las siguientes informaciones ú órdenes entre la UPS y la computadora son enviadas generalmente por medio del cable de interconexión: 1) Información de un problema en la línea de alimentación, que ha provocado que la UPS haya pasado a funcionar en modo batería. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 23 2) Información que la batería está alcanzando su nivel mínimo de capacidad y que la energía de reserva se agotará en un tiempo muy breve. Esta información, recibida en la PC, es interpretada y procesada por el software, que comúnmente toma las siguientes acciones: • Muestra en la pantalla del monitor que ha ocurrido un fallo de la línea, alertando al operador e indicando además mediante un contador regresivo, el tiempo restante de autonomía del que teóricamente se dispone. • Comienza de manera automática un cierre de los archivos abiertos y del sistema operativo, al recibir la señal de estado crítico de la batería. • Al terminar de efectuarse el cierre ordenado, el software de comunicación envia a la UPS una orden que apaga el inversor, impidiendo una descarga total de las baterías. En el Anexo 1 se muestra una UPS Centela a modo de ejemplo. 1.4 FUENTE ATX La fuente ATX es un conjunto de normas relacionadas con la forma, ubicación y características ergonómicas de las nuevas computadoras. Estas especificaciones surgieron alrededor de los años 90, partiendo del diseño de las tarjetas madres BABY AT y con el objetivo de simplificar, abaratar y mejorar este diseño, así como preparar un nuevo diseño que estuviera acorde con las nuevas arquitecturas de computadoras. De esta forma se lograba un mejoramiento económico, tecnológico y funcional. 1.4.1 Características de la Fuente ATX Las nuevas fuentes de alimentación que responden a la especificación ATX, proporcionan algunos cambios en los conectores de entrada de la tarjeta madre. Primero, se obtienen 3.3 V directamente de la fuente alimentación. Esta última permite simplificar el diseño de la tarjeta madre, ya que desde la familia de procesadores Pentium MMX, ya se emplea esta tensión para el CPU y para la memoria, lo que implica integrar a la tarjeta madre un regulador de 3.3V a partir de los 5V. Segundo, con la introducción de nuevos sistemas operativos con habilitación de apagado del sistema por software, se requiere de un conector “soft-power”. Esto trae como consecuencia que aparezca un conector de 20 pines donde se le incorpora el nuevo voltaje de 3.3v junto con las señales “soft-power”, a los voltajes estándar (+5v, -5v, +12v, -12v) En la figura 1.4.1a se observan las nuevas señales del conector de la fuente ATX. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 24 Fig1.4.1a Conector ATX PSON: Señal de salida de la tarjeta madre que tiene como objetivo el encendido de la fuente de alimentación desde el procesador. Para que se produzca el encendido de la fuente es necesario que esta señal permanezca en "0" volt, pero si no es cero, entonces todos los voltajes de salida de la fuente serán "0" excepto el de 5VSB. 5VSB: Voltaje de salida de la fuente de alimentación y es el encargado de garantizar el trabajo de los circuitos de Stand By en el procesador. Los requerimientos de corriente de este voltaje son actualmente de 720 ma para poder garantizar las nuevas facilidades, como es por ejemplo la posibilidad de "wake on LAN’’. Estas fuentes en su funcionamiento básico son iguales a las antiguas que poseen dos transistores de conmutación, con la configuración completo o semi puente, que trabajan desfasados y controlados por las señales de base provenientes de las salidas de la TL 494 o similar, como muestra la figura 1.4.1b. Para el inicio de las fuentes llamadas de auto arranque, se necesita una resistencia de 200 a 300K como promedio, que va conectada desde el punto de voltaje de +300v en los condensadores de entrada, hasta la base del transistor de conmutación. A diferencia de las fuentes anteriores, donde el interruptor de encendido conectaba o desconectaba directamente la alimentación a los condensadores de entrada, estos tienen un voltaje desde que son conectadas a la alimentación, aún sin haber sido encendidas. Estas fuentes necesitan producir el voltaje de StandBy y lo hacen mediante una fuente auxiliar, que tiene como primera función suministrar el voltaje de 5VSB a la CPU. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 25 Fig1.4.1b Señaladas en azul las resistencias suprimidas (dibujadas en el circuito, pero no conectadas) Aunque la forma de generar este voltaje puede diferir en su materialización, en general se cumple que estas fuentes auxiliares son del tipo autooscilantes( osciladores) a base de un transistor o de un Circuito Integrado. En la figura 1.4.1c se muestra el esquema general de la Fuente ATX, donde se observa, que básicamente, no se diferencian mucho de las fuentes tradicionales. Fig1.4.1c Esquema general de una fuente ATX. Sin embargo, poseen algunas particularidades como es el caso de la fuente auxiliar basada en un oscilador con un transistor Mosfet y esto se debe al mayor requerimiento de potencia. En el Anexo 2 aparece el esquema eléctrico y además se describen las funciones fundamentales de los principales componentes electrónicos de una fuente ATX, donde se destaca PWM TL494 o Modulador por ancho del pulso, que varía precisamente el ancho del pulso de conmutación, en dependencia de los valores de corriente y voltajes de salida y en el Anexo 3 se muestra su esquema eléctrico. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 26 1.5 UNIDAD CENTRAL DE LAS COMPUTADORAS PERSONALES En el presente epígrafe se estudia la Unidad Central de las Computadoras Personales, que estan integradas por los Procesadores de la firma INTEL Pentium III / Celeron y Pentium IV / Celeron, de 32 Bits, todos comúnmente usados en nuestra Universidad a lo largo de los últimos años y además los datos más significativos de los Chipset, Memoria, Sistemas de Video, Discos Duros, Buses y Puertos, así como de las Tarjetas Madres. 1.5.1 Descripción de un procesador Entre los datos mas significativos para la descripción de un procesador se encuentran la velocidad, FSB, memoria Caché, voltaje de operación, potencia, temperatura de operación, tecnología, socket y repertorio de instrucciones. Velocidad Valor expresado normalmente en MHz o GHz que viene dado por el producto aritmético del FSB y un factor interno llamado típicamente multiplicador y es uno de los parámetros mas promocionados por los vendedores de procesadores. FSB (Front Side Bus) Enlace del procesador con el resto de los dispositivos de la tarjeta madre y sus velocidades típicas van de 66MHz a 1066MHz. Memoria Caché Memoria RAM estática de alta velocidad que se encuentra dentro del procesador. Es la primera en ser accedida cada vez que se necesitan datos o códigos, trabaja a la velocidad del procesador, lo que hace que su tiempo de acceso sea muy bajo. Se estructura en los niveles L1, L2 y L3. Voltaje de operación Los microprocesadores presentan dos voltajes uno llamado de núcleo (core) y otro de entrada/salida (I/O), aunque típicamente el fabricante hace solo referencia al primero. Este valor tiene gran relación con la potencia y posee valores típicos que van de 1.55 a 1.75 Volt. Potencia Potencia disipada por el procesador en plena operación. Tiene valores típicos desde unos 15 a 115 W y amplia relación con la tecnología, voltaje y temperatura de operación. Temperatura de operación CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 27 Temperatura máxima que puede alcanzar el procesador en operación sin sufrir daños. Está expresado en grados Celsius y tiene iguales relaciones que la potencia. Tecnología Proceso de producción de los transistores que se encuentran en el procesador dado en tamaño, algunas de ellas son 180nm, 130nm y 90nm. Socket Interfaz electromecánica mediante la que se conecta el microprocesador a la placa base. Define la disposición de los terminales, voltajes, etc. Repertorio de instrucciones Cantidad de instrucciones con las que opera el microprocesador, cada generación incluye nuevas instrucciones básicamente para el manejo de la multimedia y operaciones de cadena. 1.5.2 Procesador Pentium III Este procesador aparece en el mercado el 26 de febrero de 1999 con 9.5 millones de transistores, tecnología de 250nm, FSB a 100MHz y velocidad de 450MHz con un encapsulado Single Edge Contact Cartridge 2 (S.E.C.C.2) normalmente llamado Slot1 y una memoria caché L2 de 512KB y sobre esta base alcanza la velocidad de 650MHz.La plataforma Slot1 fue rápidamente reemplazada por la Flip-Chip Pin Grid Array (FC-PGA) de socket 370 un encapsulado tipo ZIF (Zero Insertion Force) que ya daba prestaciones de bus a 100/133MHz, como muestra la figura 1.5.2a. Este tipo de procesador es el mas extendido en laUCLV, básicamente los de tipo “Coppermine” con velocidades que oscilan desde 500 a 1000MHz. Fig1.5.2a FC-PGA. “Coppermine” aparece en octubre de 1999 con tecnología de 180nm, amplía su número de transistores a 28 millones, su memoria caché L2 es de 256KB y su voltaje es seleccionable automáticamente a través de las líneas VID0 a VID3. La forma de determinar su parámetros es extremadamente sencilla dada a notificación de Intel, como señala la figura 1.5.2b. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 28 Fig1.5.2b Notificación de INTEL para los procesadores “Coppermine” Los datos mas significativos son los de la primera fila, donde se da velocidad/caché/FSB/voltaje, pero si se desea conocer más información acerca del procesador se copia el código S-Spec de la tabla 1.5.2 y se buscar el resto de la información en la guía de procesadores de INTEL.. Tabla1.5.2 Código S-Spec El último procesador en la carrera de Pentium III es el llamado Tualatin, que aparece con socket 370 FC-PGA2, con tecnología de 130nm hasta velocidades de 1.4GHz con FSB 133MHz y caché de 256 o 512KB, como en la figura 1.5.2c. Fig 1.5.2c FC-PGA2 w/IHS CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 29 Celerón Esta es la llamada línea económica de procesadores INTEL, que básicamente se trata de versiones castradas de Pentium III que típicamente van a tener una velocidad y FSB menores a su contemporáneo de P3, como por ejemplo un FSB de 66MHz y para los casos mas actuales 100MHz. La cantidad de memoria caché queda reducida a un cuarto o un medio de la del Pentium y el repertorio de instrucciones también se ve disminuido, emplea los mismos sockets que el P3 partiendo de su antecesor el PGA. 1.5.3 Procesador Pentium IV Este procesador aparece el 20 de noviembre del 2000 con 1.4GHz de velocidad, tecnología de 180nm, 42 millones de transistores, una memoria caché L2 de 256KB y un FSB de 400MHz sobre plataforma socket 423, alcanzaría velocidades hasta 2.0GHz e inauguraría lo que será estándar hasta hoy la aparición de múltiples buses. O sea que este bus de 400MHz al que se hace referencia realmente va ha estar constituido por 4 buses a 100MHz. Debido al refinamiento tecnológico INTEL, el 27 de agosto del 2001 lanza el Pentium IV de 130nm, con 55 millones de transistores, FSB a 400MHz, una memoria caché de 512KB y con plataforma socket mPGA478. Es conocido como Pentium IV “A” y trabaja a velocidades de 2.0 a 2.6 GHz. El llamado Pentium IV “B” aparece en mayo del 2002.Incluye como mejoras su FSB de 533MHz (4X133MHZ).Opera a velocidades que van desde 2.26 a 2.8 GHz, aunque existe un procesador a 3.06GHz con bus a 533MHz pero con el propósito de dar soporte a la tecnología HT. En mayo del 2003 aparece el Pentium IV “C”, que va a traer grandes modificaciones. Su bus aumenta a 800MHz (4X200MHZ) y hace su debut la tecnología llamada Hyper-Threading (HT). Esta tecnología permite por primera vez, que un solo procesador físico opere como dos procesadores lógicos y dos procesos corran al mismo tiempo. Esta disponible en velocidades que van de 2.4 a 3.4 GHz. Con memoria caché de 512KB y tecnología de 130nm, manteniendo el mismo socket478. El 2 de febrero del 2004, la familia HT tiene una nueva variación motivada por un cambio tecnológico, al reducir a 90nm el espesor y traer aparejado un aumento de la memoria caché L2 a 1MB, el número de transistores crece a 125 millones y surge el nuevo socket FCLGA775. Tras el procesador P4/HT aparece el P4 Extreme Edition HT como la élite de la tecnología INTEL, con 3 velocidades fundamentales y dependientes de la velocidad del FSB. 3.46GHz -------------------- FSB 1066MHz (1.04GHz) CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 30 3.20GHz y 3.40GHz ------ FSB 800MHz Fig1.5.3 Información del Pentium IV Integra una nueva caché de 2MB en L3 independiente de la ya tradicional L2 de 512KB, así como el incremento de nuevas instrucciones para el manejo de multimedia. Continúa operando con el socket FCLGA775 y aumenta el número de transistores a 178 millones. En la figura 1.5.3 aparece la información que suministra la firma de P-IV. 1.5.4 Resumen Como se puede apreciar, el desarrollo de los procesadores INTEL de 32 bits a sido vertiginoso, variando en pocos años de velocidades de varias decenas de MHz a varios miles. También es bueno destacar el aumento del repertorio de instrucciones y de la velocidad de enlace del procesador con la tarjeta madre, que para los casos tratados permitirá un intercambio de datos a razones muy altas: • FSB 133 MHz (1.06 GBps 133 MHz) • FSB 400 MHz (3.20 GBps 100 MHz) • FSB 533 MHz (4.20 GBps 133 MHz) • FSB 800 MHz (6.40 GBps 200 MHz) • FSB 1066 MHz (8.50 GBps 266 MHz) En la figura 1.5.4 se muestran dos gráficos evolutivos de la velocidad y de los FSB de los Pentium. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 31 x1 4000 3500 3000 2500 2000 1500 1000 500 0 Velocidad MHz Pentium III Pentium IV 9 8 7 6 5 4 3 2 1 0 GBps 133 533 1066 Fig1.5.4 Evolución de la velocidad y del FSB 1.5.5 Chipset Si se considera que el procesador es el cerebro de la computadora, se puede decir que la tarjeta madre es su sistema nervioso y el chipset su columna vertebral. El nombre chipset es un genérico no empleado por todos los fabricantes y que describe al elemento encargado de comunicar al procesador con la memoria, los buses de expansión AGP, PCI y otros, así como con las torres de disco y demás periféricos externos. Las funciones del chipset están divididas en dos grupos que están manejados típicamente por dos chips llamados Puente Norte y Puente Sur. El Puente Norte se encarga de las funciones que demandan mayor ancho de banda, tales como enlace al procesador, la memoria y bus AGP de video, mientras que el Sur atiende las funciones de menor demanda, como la atención al resto de los buses de expansión, interfases IDE/ATA/SATA, sistema de sonido, puertos USB y otros, aunque esta estructura no es compartida por fabricantes como SIS, quienes integran todas las prestaciones sobre un único chip. Por lo general cuando se habla del chipset solamente se menciona al Puente Norte, o sea, INTEL 810, 815, 845, 865 y otros, mientras que el Puente Sur es normalmente olvidado; sin embargo, esta pareja y sus funciones, son los factores mas significativos a la hora de seleccionar una tarjeta madre, ya que te dicen hasta que procesador se puede montar y hasta que velocidad crecer, que tipo de tarjeta de video o memoria se puede emplear, la velocidad de los periféricos a conectar, los tipos de discos duros, etc. INTEL ha venido asociando sus procesadores a familias de chipset y así para el caso de socket 370, los más empleados son intel 440BX, 810 y 815 con sus variantes. Para el caso de socket 478 intel 845, 850, 865,875 con sus variantes y por ultimo para socket FCLGA775 intel 915 y 925, pero aun dentro de los destinados a un socket hay amplias diferencias, como muestra la Tabla 1.5.3 CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 32 Tabla 1.5.3 Relación entre los Chipset y los procesadores Como se aprecia en la tabla, el chipset define los parámetros fundamentales de una tarjeta madre, aunque se deben siempre verificar las prestaciones que habilitó el fabricante, porque se dan casos en que las prestaciones no son implementadas, como por ejemplo, el caso en que no se habilita el bus EISA, o se suprimen puertos USB o se limita la capacidad máxima de la memoria o el disco duro. 1.5.6 Memorias El sistema de memorias es otro importante eslabón en el desempeño de una PC y los actuales emplean por lo general SDRAM, DDR o RDRAM. El termino SDRAM se refiere a “synchronous DRAM” para marcar la diferencia con los formatos anteriores como Fast Page o EDO, que eran asincrónicos y encapsulados en un formato DIMM de 168 pines. Esta memoria surge con velocidades de 66/100/133MHz, llamadas típicamente PC66/PC100/PC133 y con el propósito de servir de memoria principal a los sistemas INTEL hasta la primera generación de Pentium IV. En paralelo con las últimas versiones de SDRAM aparecen las RDRAM, Rambus o RIMM, que fueron concebidas por la INTEL para ser las sucesoras de las SDRAM. Sin embargo, el hecho de ser un formato propietario de esta firma, no permitió su masificación e impidió que sus costos bajaran y CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 33 esto hizo que los fabricantes de memorias buscaran una solución alternativa, apareciendo la DDR, aunque aun así las RDRAM se continúan produciendo en los formatos PC800 y PC1066. El nombre DDR (double-data-rate) esta dado porque duplica la transferencia de información de las tradicionales SDRAM y esto lo logra de una forma muy sencilla. Los sistemas tradicionales de memoria transmitían información solamente con el pulso de subida de su reloj, pero los fabricantes lograron que con el borde de caída también se pudiera hacer lo mismo, con lo cual el ancho de banda se duplicó, apareciendo sistemas los que se comportan como memorias a 200 o 266MHz, mientras que mantenían sus relojes tradicionales de 100 y 133MHz respectivamente. El comportamiento como memorias de mayor velocidad pero con el reloj a menos, provocó que se nombraran en base a la velocidad de transferencia, en lugar de la velocidad en MHz, apareciendo los nombres de PC2100, PC2700, PC3200 para hacer referencia precisamente a sus velocidades de transferencia de 2.1GB/s,2.7GB/s y 3.2GB/s respectivamente, para las memorias llamadas a 266, 333 y 400 MHz. Ya en los últimos dos casos, la señal de reloj ha subido a 166 y 200MHz, con un formato DIMM de 184 pines. Como se aprecia, las velocidades de transferencia han aumentado significativamente, pero los procesadores modernos cada vez requieren mayor flujo de información y la solución brindada por los fabricantes de Chipset fue la tecnología llamada Dual Channel, que logra duplicar el ancho de banda de los sistemas de memoria y opera de forma similar a un motor que necesita combustible; así, el procesador requiere datos y los diseñadores buscaron una solución similar a ponerle dos carburadores al motor y por tanto cambiar el tradicional canal de 64Bits del sistema de memoria por uno de 128, pero controlado por un árbitro como se muestra en la figura 1.5.6 de forma esquemática. Fig1.5.6 Comparación entre los anchos de bandas de las memorias CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 34 Con esta tecnología que obliga a utilizar la memoria por pares, se duplica el ancho de banda del sistema. Tabla 1.5.6 Evolución en las velocidades de las memorias El siguiente paso en la carrera de velocidades es la memoria llamada DDR 2, que logra doblar nuevamente el ancho de banda al transferir 4 datos por pulso de reloj, siendo su primera versión la PC 4200. En la tabla 1.5.6 se muestra como han evolucionado las memorias en relación con sus velocidades. 1.5.7 Sistemas de video Hace ya algún tiempo que él formato dedicado de video AGP se ha impuesto en la mayoría de nuestras instituciones y por tanto será el tratado. AGP (Accelerated Graphics Port) este formato tiene tres estándares básicos que son: • AGP 1.0, se emplea con un reloj de 66MHz, opera en el formato 1x (266Mbps) 8 bytes por cada dos ciclos de reloj y 2x (533Mbps) 8bytes por ciclo de reloj. Ambos casos emplean el conector AGP 3.3v keyed. Este salto de velocidad y los posteriores se basan en mejoras de la codificación a partir de la señal de reloj. • AGP 2.0 tiene tres modos de operación 1x (266Mbps) ,2x (533Mbps) y 4x (1.07Gbps) 16 bytes por ciclo de reloj. Puede emplear tres tipos de conectores: AGP 3.3v keyed, AGP 1.5v keyed y AGP UNIVERSAL (1.5v/3.3v). • AGP Pro es una continuidad del AGP 2.0 con la posibilidad de entregar más energía a la tarjeta de video. Tiene los mismos modos de trabajo y emplea los conectores: AGP Pro 3.3v keyed, AGP Pro 1.5v keyed y AGP Pro UNIVERSAL. • AGP 3.0 tiene cuatro modos de trabajo 1x (266Mbps), 2x (533Mbps), 4x (1.07Gbps) y 8x (2.1Gbps) 32 bytes por ciclo de reloj. Este es el formato actual mas empleado en PC tiene dos conectores AGP 1.5v keyed, AGP Pro 1.5v keyed. Las tarjetas de video AGP emplean sistemas de memoria similares a los de una PC, tales como SDRAM o DDR con las mismas velocidades y con iguales prestaciones, de ahí que este sea unos de los factores mas promocionados por los fabricantes. Además de la tradicional salida VGA, se añaden CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 35 conectores de S-video y video compuesto, así como una salida digital DVI y todo ello con el fin de interfasear la computadora a varios equipos electrodomésticos. 1.5.8 Discos duros Los discos duros constituyen el modo de almacenamiento masivo mas común de las PC, con los formatos ATA (IDE), SATA o SCSI. El primero o IDE desarrollado por Compaq en 1986 es el mas conocido y extendido, emplea un bus paralelo para la transmisión de información, con un conector de 40 líneas que admite dos dispositivos y que ha tenido variantes a lo largo del tiempo. Tabla 1.5.8a Velocidades de Transferencia Como se aprecia en la tabla 1.5.8a estas velocidades son teóricas y en realidad la velocidad de transferencia sostenida va a depender de otros factores, como la cantidad de memoria caché del disco, el grado de fragmentación de la información, etc. Estos discos actualmente operan a 5400 y 7200rpm con memoria caché de 2MB y formato 3.5”, pero este va siendo abandonado a favor del Serial ATA (SATA), el cual mantiene lo electromecánico de ATA, para reemplazar la interfase por un cable de 7 vías de comunicación serie, que alcanza velocidades de transferencia de 150MBps. También se añade memoria caché hasta alcanzar los 8MB para los discos de hasta 200GB y 16 MB para los casos de 250 a 400GB. Este formato se espera que incremente sus velocidades de transferencia a 300 y 600 MBps próximamente y solo se permite un dispositivo por cable. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 36 La tecnología SCSI se emplea en máquinas de altas prestaciones o servidores y esto se debe a su elevado costo; sin embargo, tiene las más altas tasas de transferencia alcanzando los 160 MBps y operando a velocidades de 10000 o 15000 rpm mediante comunicación paralela. Cuenta con varios formatos, como los mostrados en la tabla 1.5.8b Tabla 1.5.8b Evolución del formato SCSI Para todos los casos uno de los factores más importantes es el tiempo de acceso, que va ha estar de 3.5 a 4.7ms para SCSi y de 8 a 12.5ms para SATA y ATA. Otros términos muy empleados al hablar de discos duros son: • IDE Integrated Drive Electronics. • ATA AT Attachment (formato que debe cumplir IDE para ser conectado a una PC). • ATAPI ATA packet Interface. Interfaz creada para soportar otros dispositivos que no sean discos duros, CD, etc. • PIO Programmed Input/Output. • DMA. Acceso directo a la memoria. • Block mode .Permite múltiples comandos de escritura lectura en una sola operación. • LBA Logical Block Addressing. Formato mediante el cual se le asigna un número a cada sector físico del disco duro. • CHS Cylinder/Head/Sector .Forma de direccionar un disco duro basada en su geometría se emplea en discos hasta 504MB. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 37 1.5.9 Buses y puertos El formato USB es el mas extendido en los puertos de expansión para periféricos y cubre casi la totalidad de los dispositivos; posee dos estándares fundamentales, el 1.1 y el 2.0, con tasas de transferencia de 12Mbps y 480Mbps respectivamente. Entrega 5V con una corriente de 500mA. Es recomendable comprar dispositivos del tipo 2.0, ya que de otro modo la transferencia de información podría estar ampliamente limitada. El Firewire está orientado principalmente a los sistemas de video digital, permitiendo tasas de transferencias muy elevadas de hasta 400Mbps, aunque se espera que salga próximamente una variante 2 que sube la velocidad a 800Mbps y este formato está siendo empleado por los sistemas de captura y edición profesional de video. En la figura 1.5.9 se muestran los protocolos y las velocidades. Tabla 1.5.9 Velocidades de transferencia CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 38 1.5.10 Tarjeta madre Como se conoce, hay una gran cantidad de factores que intervienen a la hora de seleccionar una placa base y las potencialidades de las mas comunes en nuestras instituciones aparecen en el Anexo 4. 1.6 MONITORES DE TRC En este epígrafe se abordan los monitores de tubos de rayos catódicos (TRC), los principales bloques que lo conforman y su funcionamiento. 1.6.1 Diagrama de Bloques general Los bloques principales que conforman el monitor aparecen en la figura 1.6.1 y se relacionan a continuación: • Tubo de rayos catódicos. • Amplificador de video. • Circuito de deflexión y sincronización horizontal y vertical. • Fuente de alimentación. Fig1.6.1 Diagrama en bloques de los monitores Características de los monitores. Conector de video: Según el tipo de monitor, las señales de video y de sincronismo llegan por los pines que se muestran en la figura 1.6.1. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION Monocromos CGA EGA VGA VGA Conector Conector Conector Conector Conector DB9 DB9 DB9 DB9 DB15 1- Tierra Tierra Tierra Rojo Rojo ( 0.7Vpp) 2- Tierra Tierra intensidad Rojo Verde Verde (0.7Vpp) 3- No conectado Rojo Rojo Azul azul (0.7Vpp) 4- No conectado Verde Verde in Sincr. Tierra Horizontal 5- No conectado Azul Azul Sincr. Vertical. EPS 6- Intensidad Intensidad Intensidad Verde Rojo Tierra Rojo Tierra 7- VIDEO No conectado Intensidad Azul Verde Tierra Verde Tierra Sincr. Sincr. Sincr. Azul Tierra Azul Tierra Tierra PC5V 8Horizontal 9- Sincr. Vertical Horizontal Horizontal Sincr. Vertical Sincr. Vertical 10- Tierra Lógica 11- Tierra 12- SDA 13- Sincr. Horizontal 14- Sincr. Vertical 15- SCL Tabla 1.6.1a Función de los pines en los conectores de video 39 CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 40 Modo de trabajo: Los diferentes tipos de monitores que se pueden utilizar con las microcomputadoras son: 1. Monitores Monocromos (Direct-drive): Obsoletos, diseñados para trabajar con la tarjeta monocroma MDA (Monocromo Drive Adapter). También se pueden utilizar con la EGA. 2. Monitores Monocromos Compuestos: Se conectan a la salida de video compuesto del controlador CGA y proporcionan una imagen de un solo color aceptable. 3. CGA: Se conectan al controlador Color Graphics Adapter .Combinan la alta calidad de las pantallas de texto de los monitores monocromos con gráficos de alta resolución y colores. También conocidos como RGB que significa Red-Green-Blue, porque utilizan estas 3 señales separadas. 4. EGA: Controlados por la tarjeta Enhanced Graphics Adapter. Permiten una paleta de 64 colores máximo. Son multisíncronos lo que les garantiza ajustarse a las diferentes señales generadas por las tarjetas CGA y EGA. 5. VGA (Video Graphics Adapter / Video Graphics Array): En estos monitores las señales de video son analógicas y viajan por cables coaxiales, lo que les permite representar en la pantalla mayor cantidad de colores. Mejoran la calidad de los gráficos, porque usan señales analógicas, con lo cual se representa un intervalo continuo de intensidades para cada color. Teóricamente, el monitor analógico permite un ilimitado número de colores e intensidades, pero en la práctica, el inevitable ruido y las limitaciones del TRC, restringen el número de colores al orden de los 64- 256 intensidades distinguibles para cada canal. 6. SVGA: Conocido como súper VGA, que incrementa la resolución y la cantidad de colores de 32 a 64 bits de color verdadero, 600x400 a 1600x1800. Tamaño: Se mide en número de pulgadas en diagonal para indicar el tamaño visible del tubo de imagen. El tamaño del monitor no debe elegirse a la ligera, pues depende directamente de la resolución a la que se vaya a trabajar, aunque también es cierto que a mayor tamaño, mayor número de programas o aplicaciones se pueden tener abiertas y visibles simultáneamente en pantalla. Ancho de banda de la imagen o frecuencia de puntos : Define la cantidad de puntos o pixels que deben ser iluminados en un segundo, garantizando que la pantalla completa sea barrida en un período del sincronismo vertical. Se calcula multiplicando por 1.5 a 3 el total de pixels y por la frecuencia vertical. Ancho de banda del monitor (PIXEL RATE): Se define así a la capacidad de los circuitos de amplificación de video del monitor de hacer transiciones de ON a OFF sin que disminuya su ganancia. Un monitor que pueda manejar un ancho de banda superior al que requiere la imagen, CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 41 muestra que esta cualitativamente mejor. En el ancho de banda del monitor influyen la calidad de los cables y su largo mínimo aceptable, las terminaciones del conector, que no hayan extensiones, la estabilidad de la electrónica del monitor y que esté apantallado. Para el modo VGA es necesario un ancho de banda de 34 Mhz y hoy se alcanzan los 250 Mhz. Gracias al ancho de banda aumentado se pueden proporcionar mayores frecuencias verticales de refrescamiento. Tamaño de punto (DOT- PITCH): Así se denomina a la distancia más pequeña entre 2 puntos del mismo color, se mide en centésimas de milímetros. A mayor resolución menor debe ser el dot-pitch, a menor dot-pitch más celoso será el ajuste de convergencia y más caro el monitor. Hoy en día es difícil encontrar en el mercado un monitor nuevo con un dot pitch mayor de 0,28mm. Si el tamaño de punto es 0,27mm, 0,26mm o incluso 0,25mm (habitual en todos los monitores SONY), muchísimo mejor, pues la definición a altas resoluciones será mayor. tamaño monitor ancho dot pitch imagen (pulgadas) ( mm ) 640 x 800 x 600 1024 x 768 1280 x 1024 480 14 265 0.35 0.28 0.22 0.18 15 284 0.38 0.30 0.24 0.19 17 322 0.43 0.34 0.27 0.22 20 379 0.50 0.40 0.31 0.25 Tabla 1.6.1b Relación dotpitch - diámetro de la pantalla En la tabla 1.6.1b se muestra la relación dotpitch con el diametro de la pantalla. Resolución: Es una de las características más importantes de un monitor, indica el número mayor de pixels o puntos que se pueden visualizar en la pantalla. A mayor resolución mayor será el ancho de banda a emplear. En la resolución influyen el ancho de banda de la fuente de video, el cable, los amplificadores de video y el tamaño focal de cada punto del TRC. Hay unas resoluciones recomendadas para cada tamaño de la pantalla. Cuando un monitor tiene un tamaño de punto demasiado grande, se produce un solapamiento en las resoluciones mayores, CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 42 dando lugar a una pérdida de la calidad de la imagen. Si se desean utilizar resoluciones altas, se adquiere un monitor de gran tamaño, en caso contrario no se podrán apreciar los detalles. Un monitor de 14'' es válido para trabajar a resoluciones de 640x480 e incluso a 800x600, aunque en la mayoría de los casos con una notable falta de definición. Un monitor de 15'' debe ser un mínimo hoy en día, para poder trabajar cómodamente a 800x600 y ocasionalmente a 1024x768. La primera de ellas es la resolución recomendada para ver la mayoría de las páginas WEB y en trabajos con aplicaciones estándar, permite presentar todas las barras de menús e iconos sin que ocupen cerca de la mitad de la pantalla visible. Un monitor de 17'' es ideal por sus prestaciones y precio, permite trabajar a 1024x768 e incluso a 1280x1024, esta última sobre todo para el tratamiento de imágenes o para dos aplicaciones abiertas simultáneamente. Los monitores de 21'' son excesivamente caros y solamente son necesarios para aplicaciones profesionales. Frecuencia de refrescamiento (REFRESH RATE): Se expresa en Hz y si esta cifra es muy baja, la imagen brinda una sensación de parpadeo. Para conseguir una imagen estable y sin parpadeos (FLICKER), la frecuencia de refrescamiento vertical debe ser lo mayor posible, idealmente siempre superior a 75 Hz. Los rangos normales van de 50 Hz a 160 Hz. Hay que tener mucho cuidado, pues existen en el mercado monitores que soportan 87iHz a altas resoluciones, pero la "i" pequeñita nos indica que este refrescamiento lo alcanzan en modo entrelazado, lo cual es muchísimo peor, visualmente hablando, que 60Hz. 1.6.2 El Tubo de rayos catódicos (TRC) Esta válvula de vacío de grandes dimensiones, probablemente sea la única sobreviviente de las válvulas electrónicas. A pesar de su tamaño, peso y necesidad de alto voltaje, el TRC ofrece muchas facilidades que lo hacen la mejor opción para los monitores de alta resolución en comparación con otros tipos de pantallas. Uno de los parámetros que más influye en el aspecto de la imagen es el tipo de tubo de rayos catódicos que el fabricante haya elegido. El TRC está cubierto de fósforo en tres colores, rojo, verde y azul, sobre los que impactan tres haces de electrones de distinta intensidad, de manera que la combinación de intensidad sobre cada uno de estos tres colores básicos da lugar al color final representado en pantalla. Además, la imagen está siendo redibujada constantemente en la pantalla debido al continuo envío de información y a este efecto se le llama refrescamiento. Las características más importantes que diferencian a los tubos de pantalla son las que se observan en la figura 1.6.2. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 43 1.Tamaño de la pantalla (diagonal) 2.Ángulo de desviación 3.Diámetro del cuello 4.Longitud total Fig1.6.2 Características externas de los TRC Desde que fueron creados se han reducido sus dimensiones acortando el cuello del tubo o aumentando el ángulo de desviación y para ello se disminuyó el ancho del cuello del tubo para aprovechar mejor la potencia de las bobinas de desviación que estarían más cerca del haz. El TRC por lo general está compuesto por: I. El proyector del haz electrónico, un sistema de electrodos, que aumentan la exactitud del flujo. II. La pantalla. III. El sistema de deflexión (yoke), desmagnetización y ajuste de convergencia estática. 1.6.3 El Amplificador de Video Fig1.6.3a Diagrama en bloques de la etapa de video Estos circuitos controlan, amplifican y procesan la señal de video que procede de la tarjeta gráfica, incluyen restauración de nivel de DC y fijación ventana de negro. El amplificador de video se diseña en dos etapas, como aparece en la figura 1.6.3a. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 44 Preamplificador de video. Aisla e incrementa la señal de bajo nivel, se realizan los ajustes de CONTRASTE y BRILLO de la señal de video para los 3 cañones en función de la luz ambiental mediante transistores o con circuitos integrados (CI). Estos ajustes son interdependientes. Brillo (ajuste del usuario): En la pantalla brillan más las partes blancas y las oscuras. Se le aplica a G1 un voltaje más negativo que al cátodo, para que los electrones converjan limitando su paso. Determina el nivel de negro del monitor; de modo que si es activado muy alto o brilloso, el monitor no reproducirá el negro, pero si está muy bajo, en los grises se reproducirán como el negro. En los tubos a color, G1 es común para los 3 los cañones, por lo que las variaciones en el nivel de negro hay que compensarlas ajustando el BIAS para cada cañón. Este ajuste se realiza con un patrón blanco. Contraste (ajuste del usuario): Una vez ajustado el brillo, el contraste determina el nivel de blanco; se regula así la ganancia del amplificador, por lo que las partes blancas brillarán más que las oscuras. Actúa simultáneamente sobre los 3 cañones de los monitores a color. Amplificador de video. Este circuito casi siempre se encuentra en una pequeña tarjeta colocada en el cuello del TRC, conocida por varios como chispero, pues en ella se encontrarán los mencionados componentes. De esta etapa, la señal de video sale con una amplitud de 60Vpp aproximadamente capaz de energizar los cátodos, en ella se debe garantizar que no salga video en los tiempos de retroceso vertical y horizontal con ayuda de los pulsos de borrado (blanking pulses) y se realizan los ajustes de BIAS y DRIVE (GAIN) de los colores (con el contraste al máximo) hasta que no se chorree ninguno de ellos y se obtenga el blanco neutral. Bias (ajuste del servicio): Este ajuste es independiente para cada cañón y consiste en fijar un nivel de voltaje directo a la señal o nivel de negro (ajuste de background o color cuando no hay video). El ajuste se realiza mejor sin señal de video, solamente con el barrido en la pantalla, a saber: • Se llevan los potenciómetros de BIAS a un punto medio. • Se lleva el contraste al máximo. • Se lleva el brillo al mínimo y el sub-brillo a la posición media. • Se ajusta el screen de manera que se vea el barrido. • Se ajusta RED-BIAS de manera que la pantalla se ponga ligeramente rojiza, luego regule gradualmente GREEN-BIAS y BLUE-BIAS hasta que la imagen en la pantalla sea blanca. • Se restablecen las condiciones normales de contraste, brillo y screen. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 45 Drive (ajuste del servicio): Este ajuste se realiza para 2 cañones, manteniendo el tercero fijo y consiste en la regulación de la intensidad de la señal de video. Debe realizarse con un patrón de barras de colores o de letras blancas sobre fondo negro. • Se ajustan contraste y brillo al máximo. • Se ajustan los potenciómetros de DRIVE de manera que se obtenga blanco perfecto en la pantalla a partir de la referencia visual que tomemos de la imagen. • Se restablecen las condiciones normales de contraste y brillo. El voltaje a la entrada de los cañones debe ser de aproximadamente 60 Vpp. En la figura 1.6.3b se muestran los ajustes del Amplificador de Video. Fig1.6.3b Ajustes en el Amplificador de Video 1.6.4 Circuitos de Sincronismo Horizontal y Vertical En este epígrafe se hará referencia a los siguientes bloques funcionales: I. II. III. IV. Separador de sincronismos Circuitos detector de modo y corrector de polaridad. Circuito generador de barrido vertical. Circuito generador de barrido horizontal y de alimentación del TRC. 1.6.4.1 Separador de sincronismos Los sincronismos pueden llegar al monitor en tres variantes: • Hsync y Vsync separados en cables individuales. • En una señal de Sincronismo Compuesto, donde Hsync y Vsync se combinan de forma lógica y llegan en un solo cable. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION • 46 En la señal de Sincronismo en Verde, donde la señal de sincronismo compuesto se combina con señal de video Verde. El separador de sincronismos es necesario en las 2 últimas variantes para hacer llegar los pulsos de sincronismo a los CI controladores sin ruidos. Esta función la pueden realizar algunos CI internamente. 1.6.4.2 Circuitos detector de modo y corrector de polaridad En los monitores, multisync determina el modo de operación a partir de la polaridad de los sincronismos Horizontal y Vertical, controla también la circuitería que permite modificar el tamaño vertical según el modo y corrige la polaridad de los sincronismos para que lleguen correctamente a los CI procesadores de estos. 1.6.4.3 Circuito generador de barrido vertical Fig1.6.4.3a Diagrama de bloques de la etapa Vertical Las funciónes del Generador de Barrido Vertical que se muestra en la figura 1.6.4.3 son las siguientes y sus señales aparecen en la figura 1.6.4.3b con sus valores típicos: • Generar una rampa de corriente lineal en las bobinas de deflexión vertical, que garantice que el haz electrónico barra la pantalla de arriba hacia abajo y controlado por la señal de sincronismo vertical, que indica que se ha completado un cuadro. • Proporcionar pulsos de borrado para que no llegue a la pantalla el haz de electrones durante el retroceso vertical. En este bloque se realiza el siguiente ajuste: V.sise (ajuste del usuario). Se conocen tres formas de variar el ancho vertical de la imagen: 1. Variación de la ganancia de las etapas excitadoras de los amplificadores de desviación Vertical (más usado). 2. Variación de la ganancia en la etapa de salida vertical. 3. Colocando una inductancia variable en serie con las bobinas de deflexión vertical. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 47 V.hold (ajuste del usuario). Detener el scroll de la imagen por la pantalla, donde los pasos a seguir son los siguiente: 1. Mover el potenciómetro completamente a la izquierda, luego girarlo gradualmente a la derecha hasta que se estabilice la imagen y marcar el punto 1. 2. Mover el potenciómetro completamente a la derecha, luego girarlo gradualmente a la izquierda hasta que se estabilice la imagen y marcar el punto 2. 3. Poner definitivamente el potenciómetro en un punto entre el 1 y el 2. V.center. Cuando el barrido se desvía hacia arriba o hacia abajo. El circuito está controlado por el generador de sincronismo vertical, un CI capaz de generar pulsos aunque no le llegue señal del controlador y que puede sincronizarse con los pulsos positivos y/o con los negativos. Fig1.6.4.3b Señales del circuito de barrido vertical 1.6.4.4 Circuito generador de barrido horizontal y de alimentación del TRC Fig1.6.4.4a Diagrama en bloques de etapa horizontal CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 48 El circuito generador de barrido horizontal y de alimentación del CRT, cuyo diagrama de bloques aparece en la figura 1.6.4.4a es el más complejo y uno de los más problemáticos. Trabaja con frecuencias desde 15 khz hasta 100 khz dependiendo del modo y la resolución. Su función es garantizar lo siguiente: • Que en las bobinas de deflexión horizontal se cree un campo magnético capaz de mover al haz electrónico de un extremo lateral al otro de la pantalla, describiendo una línea a la frecuencia fijada por la señal Hsync, • Que se generen pulsos de borrado durante el retroceso del haz horizontal. • Sirve como fuente de pulsos para alimentar al TRC con alto voltaje (HV) y genera el voltaje para las rejillas de Foco, Screen, Brillo y otros circuitos. Como todas las fuentes, incluye circuitos de regulación y de protección por sobrevoltaje. Se realizan los siguientes ajustes: 1. H.phase(ajuste del usuario). Cuando la imagen se desvía a la izquierda o a la derecha. Se ajusta el tiempo relativo entre los pulsos de sincronismo horizontal y el retroceso. 2. H. center (ajuste del usuario). Cuando el barrido se desvía a la izquierda o a la derecha. 3. H. hold (ajuste del servicio). Se sincronizan el oscilador del CI y la señal de sincronismo del controlador. Side-pin (ajuste del servicio). Ver corrección de pincushion. Se ajusta el tamaño de la corrección. Si no puede ajustar, revise el circuito de corrección o vea el ajuste de la geometría. Los componentes fundamentales de este bloque son los siguientes: Oscilador horizontal: Es un CI capaz de generar pulsos aunque no tenga señal a la entrada. Cuenta con un oscilador controlado por voltaje (VCO) y un comparador de fase (AFC), que recibe una muestra de la señal a la salida del circuito horizontal y la señal de Hsync del controlador de video, produciendo un voltaje DC para la corrección del defasaje de las 2 señales para mantenerlas sincronizadas. Triplicador: Se le nombra así porque multiplica la salida del flyback (2 a 8 Kv) aproximadamente por 3 veces, dando de (7 a 25 Kv) a la salida para alimentar el ánodo del TRC. Está compuesto de uno o varios pasos de diodos y condensadores. En los monitores modernos vienen en un bloque sellado junto al flyback. Filtro de alto voltaje: El filtrado del alto voltaje se realiza en el TRC. Se aplica el voltaje al ánodo entre la capa interna de grafito y la capa externa cubierta de una superficie conductora y no CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 49 conectada a la interna. Entre ellas se forma el condensador que filtra el alto voltaje y el vidrio es usado como dieléctrico. Potenciómetro de foco-pantalla: Los voltajes de foco y pantalla son altos y se obtienen a la salida del flyback, a partir de un divisor hecho con potenciómetros especiales bien aislados. En los puntos de aplicación de estos voltajes al tubo, se colocan chisperos que lo protegen de posibles arcos de alto voltaje. Ajuste de la pantalla (servicio): Consiste en aplicar a la rejilla G2 del TRC un voltaje positivo para atraer con más o menos fuerza a los electrones. Como resultado, la imagen varía su intensidad al cambiar la aceleración del haz electrónico. Ajuste del foco (servicio): Se regula hasta que se logre hacer bien fino al haz electrónico y mejore por tanto la calidad de la imagen. Un mal enfoque produce la propagación del brillo de la imagen, especialmente en las esquinas de la pantalla. El foco tiende a empeorar con el tiempo, lo cual es una señal del envejecimiento del TRC. Yoke: A la salida del circuito, se genera una rampa de corriente que produce un campo electromagnético en las bobinas de deflexión, capaz de mover el haz electrónico de derecha a izquierda. La inductancia de la bobina horizontal está entre 300 microH y 5 miliH. Regulación del alto voltaje: Garantiza un voltaje estable a la salida del flyback. Es un circuito clave en los monitores MULTISYNC, en los cuales las variaciones de frecuencia pueden provocar el aumento peligroso de la emisión de rayos X o la destrucción del tubo de pantalla y el resto de los circuitos que se alimentan del flyback, en caso que suba mucho el alto voltaje. Si disminuye, entonces al aumentar el Brillo, se incrementa el trazo luminoso, dando un efecto de desenfoque. La imagen se puede enfocar si se ajusta el Brillo a un voltaje poco elevado. Circuito hold down: Es un circuito de protección que interrumpe la oscilación horizontal si no funciona la regulación o si se produce alguna rotura que provoque la subida descontrolada del alto voltaje a la salida del flyback. Si se dispara el circuito hold down o si hay saltos de alto voltaje, lo primero que se puede hacer es bajar el voltaje B+ que genera la fuente para ver la causa del fallo. Corrección de pincushion: La corrección de acerico o de la distorsión de barril consiste en eliminar las curvaturas que tienden a producirse en los bordes de la imagen hacia el exterior o el interior. Inicialmente se empleaban imanes montadas a los lados del tubo, pero en la actualidad se garantiza electrónicamente una correcta geometría en los laterales de la imagen, aunque se colocan adicionalmente imanes en el yoke. El ajuste se realiza con la ayuda de un patrón con cuadros, como en la figura 1.6.4.4b. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 50 Fig1.6.4.4b Ejemplo de cómo se regula la deflexión horizontal 1.6.5 Fuente de Alimentación La fuente de alimentación es la encargada de convertir el voltaje AC de la línea, en los voltajes necesarios para los circuitos y en ella se realizan las funciones de ahorro de energía. • 5v ,12v, 24v para los CI • 24v, 80 -- 150v para el flyback y el amplificador de video (ajustables) • 6.3v, 12 v para el filamento Existen variantes en las que se obtiene a la salida un voltaje único B+ (80 - 150 v) para alimentar al flyback y darle el voltaje de arranque al circuito de deflexión horizontal, obteniéndose el resto de los voltajes a la salida del flyback. En estos equipos el consumo se reduce considerablemente. Algunas fuentes modernas traen implementado el modo POWER SAVING o DPMS (Display Power Managenent Signalling) o sistema de gestión de consumo, que junto al adecuado software permite obtener diferentes niveles de manejo de la fuente, al quitar en diferentes combinaciones las señales de sincronismo vertical y horizontal. Los niveles se distinguen por cuanto se reduce el consumo y el tiempo de recuperación al ser directamente proporcionales. Los modos de ahorro energético suelen ser tres: • Espera (STANDBY ) • Reposo (SUSPEND) CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION • 51 Apagado (OFF) En cada uno de ellos el consumo es menor que en el anterior y el tiempo de recuperación mayor. No todos los monitores soportan todos los modos y según el principio de funcionamiento se dividen en Lineales y Conmutadas o de pulso. 1.6.5.1 Lineales Las fuentes lineales están compuestas por los siguientes bloques funcionales: 1) Transformador: Su función es brindar los voltajes deseados a partir del voltaje de la red (110 / 220 volts AC). En estas fuentes, la corriente de salida es directamente proporcional a la corriente de entrada; por tanto, para lograr mayor potencia es necesario utilizar un mayor calibre de alambre en el secundario del transformador y esto implica un mayor tamaño. El transformador garantiza el aislamiento eléctrico entre los voltajes de salida Vout y el de la línea. 2) Rectificación: Convierte el voltaje AC en DC. 3) Filtro capacitivo: Su función es disminuir el rizado del voltaje rectificado. La capacidad necesaria para eliminar el rizado de 60 hz es muy grande. Este filtro debe ser descargado antes de comenzar una reparación con una resistencia de 5 kohm y 10 watt aproximadamente. 4) Regulador: Debe garantizar que el voltaje de salida (Vout) se mantenga estable, independientemente de las variaciones de la línea o de la carga. El regulador compara la salida con una referencia y ajusta la circulación de corriente para hacer el voltaje de salida igual al deseado. De acuerdo con el consumo del circuito que alimenta, puede emplear un diodo zener cuando la corriente necesaria es baja o un circuito discreto con transistores ó con circuitos integrados tales como el LM 317 (variable), 7805 (+5v), 7912 (-12v). Tambien se emplean reguladores híbridos de 5.1v o de 12v, como los utilizados en videos. En ocasiones se elimina el transformador y a través de circuitos reguladores (STR) se obtiene a la salida el voltaje de alimentación del flyback B+. Las salidas son rectificadas y filtradas con condensadores electrolíticos e inductores que forman filtros pasa bajo del tipo ¨Pi ¨ C-L-C o C-R-C. La eficiencia de estas fuentes es bastante baja, por lo que en ocasiones al aumentar la carga se cae el voltaje de salida. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 52 1.6.5.2 Fuentes Conmutadas o de pulso Fig1.6.5.2 Diagrama en bloques de una fuente de pulsos Las Fuentes Conmutadas como el diagrama de la figura 1.6.5.2 son las más utilizadas por las ventajas que ofrecen en comparación con las lineales al permitir mayor eficiencia, debido a que tienen menor pérdida de potencia, especialmente cuando la carga está al máximo. Además tienen menor tamaño y peso gracias a que el transformador trabaja en alta frecuencia (40khz - 1 Mhz), por lo cual puede ser más ligero comparado con los grandes componentes necesarios para operar a 50 / 60 hz. En este grupo se incluyen los convertidores AC- DC y DC - DC. Los bloques funcionales de las fuentes de pulso son: 1. Filtro de línea. Funciona como atenuador de Interferencia Electromagnética (EMI) al equipamiento circundante, especialmente a otros monitores; para que la frecuencia de trabajo de la fuente no afecte a los equipos que se encuentran alrededor. 2. Circuito rectificador y filtros. Aquí se controla mediante un jumper que el circuito trabaje como doblador de voltaje cuando se conecta a 115 v AC o como puente rectificador cuando se conecta a 220 v AC. En ambos casos se obtiene 320v DC. El filtro debe ser descargado con una resistencia de 5 kohm y 10 watt aproximadamente, antes de comenzar la reparación. 3. Circuito de arranque. Suministra voltaje durante el encendido. 4. Controlador PWM o modulador del ancho del pulso. Estos CI trabajan a una alta frecuencia de conmutación ( 40 - 500khz ) y tienen comparadores internos que sensan las variaciones del voltaje de salida y modulan el ancho de los pulsos que generan, Estos pulsos se aplican a los transistores de conmutación y potencia a una frecuencia fija y de este modo se estabiliza el voltaje a la salida del transformador. CAPITULO 1. FUNCIONAMIENTO DE LOS EQUIPOS DE COMPUTACION 5. Transistores 53 Bipolares, Mosfets o Tiristores (SCR o Triacs) de potencia y conmutación. Ayudan a convertir el voltaje rectificado en una onda de pulsos. 6. Circuito de transformación de energía. Compuesto por un transformador bastante pequeño de alta frecuencia con núcleo de ferrita, que convierte los pulsos en voltajes que son rectificados y filtrados empleando condensadores e inductores en configuraciones ¨ Pi ¨ C-L-C, El transformador provee la barrera de aislamiento entre los voltajes de salida Vout y el voltaje DC de entrada. 7. Circuitos de protección por sobrecarga y sensado del voltaje de salida. La barrera de aislamiento es cruzada por un circuito optoelectrónico para sensar Vout y mantenerla constante. 8. Circuitos detectores de sincronismo. Aparecen en los monitores modernos y su función es poner al monitor en modo de ahorro de energía, según se haya programado al BIOS o al sistema operativo. Cuando eliminan el sincronismo horizontal el monitor entra en modo STANDBY, cuando es el vertical en modo SUSPEND y si se eliminan ambos sincronismos en OFF. Las fuentes de conmutación se pueden clasificar como: I. Tipo Flyback, emplean CI regulador de potencia (PWM). II. Tipo Half-bridge, emplean CI regulador de potencia (PWM). III. Autooscilantes. IV. Regulación automática, emplean CI de autoregulación tipo STR. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 54 CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO En el presente Capítulo se detallan primeramente los factores que atentan contra la vida útil de los equipos, los utiles necesarios para efectuar los mantenimientos y los pasos a seguir para realizarlos a todos los equipos que se abordan en el trabajo. 2.1 RATÓN Y TECLADO Factores que atentan contra la vida útil del equipo Entre los factores que atentan contra la vida útil del equipo se encuentran el polvo, el agua y los agentes corrosivos Polvo: Crea una capa aislante en los contactos y rodillos que impide el adecuado funcionamiento de estos elementos. Agua y agentes corrosivos: Deterioran y corroen los circuitos y los componentes de las placas. También pueden provocar cortocircuitos entre los elementos. Útiles necesarios para el mantenimiento Entre los útiles necesarios para realizar los mantenimientos se encuentran los siguientes: a) preventivo. • Aspiradora portátil • Destornilladores de estría y de paletas • Brocha • Paño • Algodón • Alcohol isopropílico • Spray de espuma b) correctivo • Multímetro digital • Maleta de herramientas • Soldador • Herramienta de diagnostico CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 55 2.1.1 Mantenimiento Preventivo 2.1.1.1 Ratón • Comprobar el funcionamiento del equipo. • Limpiar el exterior usando el spray de espuma. • Desarmar y limpiar los rodillos y la esfera, usando alcohol isopropilico. • Limpiar la placa usando la brocha. • Cerrar y comprobar del funcionamiento del equipo. 2.1.1.2 Teclado • Comprobar el funcionamiento del equipo. • Limpiar el exterior usando la aspiradora portátil, la brocha y spray de espuma. • Limpiar el interior usando alcohol isopropílico y algodón. • Cerrar y comprobar el funcionamiento del equipo. 2.1.2 Herramienta de diagnóstico para el Ratón y el Teclado Entre las Herramientas de diagnóstico mas utilizadas para el Ratón y el Teclado se encuentra el programa computacional Hiren 8.2 de AmSavS, donde se incluye la herramienta diagnóstico PC-Check 6.25 de la firma Eurosoft. Los pasos que se siguen para realizar el diagnóstico se describen a continuación y las pantallas que se corresponden con cada paso, aparecen en el Anexo 5. Pasos para el Diagnóstico 1. Pantalla de menú del Hiren 8.2. Escoger la opción numero 2. 2. Escoger la opción número 5 sobre “Herramientas para Testeos”. 3. Escoger la opción numero 3 “PC CHECK 5.65”. 4. Pantalla de presentación de “PC CHECK 5.65”. 5. Aparece otro menú con una serie de opciones, escoger la numero 2 “Advanced Diagnostics Tests”. RATÓN 6. Escoger la opción de comprobación del ratón. 7. Pantalla de inicio de comprobación del ratón, oprimir cualquier tecla para continuar. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 56 8. Primera prueba, para comprobar ambos clic del ratón. El programa toma un tiempo de 20 seg para esto. 9. Oprimir el clic izquierdo del ratón sobre el cuadrado que indica OK, para pasar a la próxima prueba. Se da un tiempo de 30 seg. 10. Oprimir el clic izquierdo del ratón en el cuadrado que indica pass (paso). Esto toma un tiempo de 30 seg. 11. Prueba para comprobar la colocación del ratón. Hay que llevarlo a los extremos superior e inferior de la pantalla donde están las señalizaciones en amarillo y dar clic izquierdo sobre ellas y esto debe hacerse en un tiempo de 45 seg. 12. Reducir más el área de colocación del ratón, dar clic izquierdo encima de los puntos en amarillo y para esto se emplea un tiempo de 45 seg. 13. Aparece el puntero clásico del ratón y realizar la misma operación del punto 11. 14. Realizar la operación del punto 12 con el puntero clásico del ratón en la pantalla. 15. Oprimir el clic izquierdo en el identificador HAND y para esto se da un tiempo de 30 seg. TECLADO 16. Comenzar el diagnostico del teclado con la opción “Keyboard”. 17. Escoger la opción del teclado más apropiada. Se tomó de 105 teclas con la norma americana. 18. Primera verificación al teclado, “Verify Keyboard”. 19. Comprobar el funcionamiento de las teclas. 20. Comprobar que las teclas concluido satisfactoriamente. 21. Segunda verificación, “Keyboard Controller Test”. 22. Verificación concluida satisfactoriamente. 23. Prueba “Key Repeat Test”. 24. Verificación concluida. 25. Ultima prueba, “Keyboard Led Test”, para la comprobar los 3 leds del teclado. 26. Scroll Lock. 27. Num Lock. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 57 28. Caps Lock. 2.2 IMPRESORAS MATRICIALES Factores que atentan contra la vida útil del equipo Entre los factores que atentan contra la vida útil del equipo se encuentran el calor, el polvo, el agua y los agentes corrosivos Calor: Todos los equipos electrónicos llevan dentro de sí la semilla de su propia destrucción. Más de la mitad de la potencia entregada a lo chips y elementos discretos se disipa en forma de calor. Si este no es liberado rápidamente puede llegar a destruirlos. Polvo: Crea una capa aislante en la tarjeta madre de la impresora que impide la transferencia de calor hacia el medio, congestiona los espacios y promueve la corrosión. Agua y agentes corrosivos: Deterioran y corroen la circuitería así como los componentes de la placa madre, también pueden provocar cortocircuitos entre los elementos. Útiles necesarios para el mantenimiento Entre los útiles necesarios para realizar los mantenimientos se encuentran los siguientes: a) preventivo. • Brocha • Aspiradora portátil • Destornillador de estría y paleta • Spray de espuma • Alcohol isopropílico • Algodón • Aceite o grasa silicona • Papel • Cinta de impresión b) correctivo. • Documentación técnica • Multímetro digital • Maleta de herramientas • Aceite o grasa silicona CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 58 2.2.1 Mantenimiento Preventivo Pasos a seguir para realizar el mantenimiento preventivo. 1. Comprobar el funcionamiento del equipo. 2. Limpiar el exterior utilizando la aspiradora portátil, la brocha, el spray de espuma y el algodón. 3. Limpiar el cabezal de impresión utilizando el alcohol isopropílico y el algodón. 4. Limpiar y engrasar sus partes mecánicas. 5. Comprobar el funcionamiento del equipo. 2.2.2 Mantenimiento Correctivo El Mantenimiento Correctivo a las impresoras es un tanto complejo y eventual, dependiendo del tipo de falla existente. Se dedicará un epígrafe a continuación al cabezal de las impresoras EPSON-LX 300 por su importancia y complejidad. 2.2.3 Desarme y mantenimiento del cabezal de 9 pines de la impresora EPSON-LX 300 Los pasos que se siguen para realizar desarme y mantenimiento se describen a continuación y las pantallas que se corresponden con cada paso de la numeración, aparecen en el Anexo 6 y es muy demostrativolo que viene en cada figura. 1. Cabezal fuera de la impresora. 2. Palanquear hacia arriba con dos destornilladores de paletas finos por los laterales, para extraer el cuerpo del cabezal del disipador. 3. Vista del cuerpo del cabezal y del disipador por separado. 4. Desmontar la presilla de sujeción ,Para liberar las partes del cuerpo del cabezal,. 5. Retirar la cubierta plástica que protege a los “martillos” de golpeo de los pines. 6. Observar los “martillos” de golpeo de los pines. 7. Separar el soporte de las bobinas electroimanes del portapines. 8. Mostrar las partes del cabezal luego del desarme efectuado. 9. Mostrar las bobinas electroimanes dentro de su soporte. 10. Extraer los pines del portapines para efectuar su limpieza. 11. Aparecen las imagenes del portapines y de los 9 pines por separado. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 59 12. Introducir el portapines y los pines dentro de un recipiente con alcohol purificado para su limpieza. Debe mantenerse por un tiempo de 15 minutos para eliminar los restos de tinta que presenten. 2.3 SISTEMAS DE ALIMENTACIÓN ININTERRUMPIDOS (SAI) Factores que atentan contra la vida útil del equipo. Entre los factores que atentan contra la vida útil del equipo se encuentran el calor, el polvo, el agua y los agentes corrosivos Calor: Más de la mitad de la potencia entregada a lo circuitos integrados y a otros elementos discretos se disipa en forma de calor, pero si este no es liberado rápidamente puede llegar a destruirlos. Polvo: Crea una capa aislante en la tarjeta de la UPS, que impide la transferencia de calor hacia el medio, congestiona los espacios y promueve la corrosión. Agua y agentes corrosivos: Deterioran y corroen la circuitería, así como los componentes de la placa, también pueden provocar cortocircuitos entre los elementos. Útiles necesarios para el mantenimiento a) preventivo. • Pinza de punta fina. • Brocha. • Aspiradora portátil. • Spray anticorrosivo. • Destornillador de estría y paleta. • Spray de espuma. b)correctivo. • Variac • Batería en buen estado • Bombillo de 12 ó 24 volt • Osciloscopio • Multímetro digital o analógico • Pistola de soldar o cautín • Maleta de herramientas CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 60 2.3.1 Mantenimiento Preventivo Pasos a seguir para el mantenimiento preventivo. 1. Desarmar el equipo. 2. Limpiar el polvo con la brocha o con la aspiradora portátil. 3. Aplicar spray anticorrosivo a la placa para limpiarla, o en su defecto alcohol izopropílico. 4. Apretar las tomas para que no queden con falso contacto. 5. Armar la UPS. 6. Hacer la limpieza externa aplicando el spray de espuma. 2.3.2 Mantenimiento Correctivo La reparación de las fuentes de alimentación depende del tipo de fallo como que se presente y la acción preventiva juega un papel muy importante, no obstante, se describiran los defectos mas comunes de las UPSs y además se describirá una metodología de reparación de la UPS CENTELA 625A debido a su gran uso. 2.3.2.1 Defectos comunes en las UPS Los fallos pueden ser tan diversos como la ruptura y apertura de varistores y fusible, debido fundamentalmente a sobre tensiones, como el típico enchufe del equipo de 110v en una línea de 220v. Suelen dañarse los resistores de potencia asociados al Mosfet de clampeo, debido a envejecimiento y sobrecalentamiento. Otros de los elementos que suelen descomponerse son los siguientes Circuitos Integrados: HEF4093BP, 4011BCN (compuertas NAND) SG3524, CS3524, SG3525, UC3842, KA3843 (circuitos PWM) LM393, LM358N, LM339N (comparadores) KA317, LM317 (reguladores de voltaje) IRF840, IRF450, IRFZ44N, IRFZ33, NDP7060, 5N06HD (MOSFET) 4001BP (compuertas NOR) TC4030BP (compuertas OR) CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 61 2.3.2.2 Metodología de reparación de la UPS CENTELA 625A Es importante considerar que no se debe conectar una UPS que se desee reparar para comprobar si trabaja o no, ya que puede ser dañada. Debe abrirse y seguir los pasos que se dan a continuación, porque puede ocurrir algo inesperado al conectarla. Su esquema eléctrico aparece en el Anexo 1. Pasos a seguir para la reparación de la UPS CENTELA 625A En el Anexo 7 se muestran un conjunto de figuras que apoyan los pasos a seguir para la reparación de la UPS CENTELA 625A y tambien se observan numerosas formas de onda en diversos puntos, que esclarecen considerablemente este procedimiento. 1. Realizar una inspección visual para determinar si hay algún componente quemado o deteriorado, especialmente los fusibles de la batería y los Mosfet de potencia. 2. Medir los Mosfet de potencia. Estos deben dar como un diodo entre S-D y abierto en todas las demás mediciones. 3. Medir todas las fuentes de los Mosfet de potencia. Deben estar unidos entre si y a tierra. 4. Medir la resistencia que existe entre cada una de las compuertas de los Mosfet de potencia y la tierra. Cada uno debe medir 6.2 KOhm. Este valor depende del tipo de UPS, pero lo principal es que todas las mediciones deben resultar iguales en un mismo tipo de UPS. 5. Medir el Mosfet Q5. Debe dar como un diodo entre S-D y entre S-G. En los otros casos debe dar abierto. 6. Conectar la batería y el conector CN1. Apretar el botón de encendido, entonces la UPS debe pitar una vez y encender el LED verde durante 2 seg. aproximadamente. Después enciende el LED amarillo un segundo y debe apagarse. Si no se enciende la UPS, debe pasar al punto siguiente 7. Mientras esté apretado el botón de encendido, debe existir 5V en el VCC del microprocesador (pin 28), como en la Fig.1 del Anexo 7, en el modo inversor. Si no está presente este voltaje, debe revisar Q1 (B647), Q2 (A733), U1 (LM7805) y su circuito asociado. Si aparecen los 5V sólo mientras se mantiene apretado el interruptor de encendido y no pita, entonces debe ir al punto siguiente. Si después de soltar el interruptor continuan los 5V hasta que se apaga sola la UPS, entonces debe saltar al punto 9. 8. Revisar si hay oscilaciones de 1.5 Khz. en el pin 3 del microprocesador (PA7), como en la Fig.2 en el modo inversor. Si existen, revisar el circuito asociado a Q3, Q2, y Q1. Cuando no hay oscilaciones en el pin 3 del microprocesador, debe revisar su cristal y ver CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 62 si está oscilando. Revisar también si existen soldaduras frías en estos elementos. Si se mantiene el defecto, cambiar el microprocesador y/o el cristal. 9. Para evitar que al conectar los Mosfet de potencia al transformador se dañe, es necesario asegurarse que las compuertas de cada pareja del Mosfet reciban pulsos de 60 Hz, en el momento que se enciende el LED amarillo y hasta que se apaga la UPS. Lo ideal es hacerlo con un osciloscopio, aunque también puede ser con un multímetro. 10. Conectar los 2 cables del transformador de potencia a los terminales de los Mosfet de potencia. Al apretar el botón de encendido, debe pasar lo mismo que en el punto anterior, excepto que al encender el LED amarillo, este se mantiene encendido y la UPS pita cada 2 seg. Aproximadamente, mientras no se apague la UPS por medio del botón de encendido. En caso que todo esté bien, pase al punto 11. 11. Revisar el estado de F1 (resistencia de 0.1 Ohm que sirve como fusible) y la cuarteta formada por D8-D11. Si todo esto está bien, revisar el estado del Mosfet Q5 y entonces cuando está bien, revisar el circuito formado por R37, R38 y C25. 12. Después, instalar el conector CN2 y el cable de alimentación. Cuando se enciende la UPS, debe pasar lo mismo que en el punto anterior, excepto que al estar activado el LED amarillo durante 2 ó 3 seg. se enciende de nuevo el LED verde, comenzando a cargarse la batería, lo que se debe medir con el multímetro, observando como su voltaje se eleva progresivamente. Si la batería no se carga, revise todo el circuito de carga de la batería. Si la UPS no pasa del estado de inversor al estado de línea, debe ir al punto siguiente, si está bien, entonces debe ir al punto 14. 13. Revisar el pin 16 del microprocesador y observar la Fig.4 del modo inversor. Además, revisar el circuito asociado a Q22, Q23, Q24 y Q25. También debe asegurarse que el pin 11 de la Fig.1 en el modo inversor del microprocesador (PB5), tenga un “1” lógico para saturar a Q22 y Q25. 14. Conectar una carga a la UPS y encenderla. Conectar y desconectar el cable de alimentación un par de veces y asegurarse que la salida no se interrumpe en ningún momento. 15. Estando encendida la UPS y alimentada de la Red, quitar todas las cargas y desconectarle el cable de alimentación. En este caso, debe caer en estado de inversor durante un minuto aproximadamente, después de lo cual deja de pitar, se apaga el LED amarillo y comienza a encenderse el LED verde muy brevemente. Esto indica que la UPS cayó en estado de Stand-By. Al conectarle el cable de alimentación de nuevo, se debe encender fijo el LED verde. En caso que existan problemas con este punto o que la UPS comience a dar pitazos cortos indicando que hay una sobrecarga, revisar el circuito CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 63 formado por R61, L1, D15, R42, ZD6 y C12. Muchas veces es un falso contacto en R61, o que L1 está abierta. 2.4 FUENTE ATX Factores que atentan contra la vida útil del equipo. Tambien los factores que atentan contra la vida útil de las fuentes ATX son el calor, el polvo, el agua y los agentes corrosivos Calor: Más de la mitad de la potencia entregada a los circuitos integrados y a los elementos discretos se disipa en forma de calor. Si este no es liberado rápidamente puede llegar a destruirlos. Polvo: Crea una capa aislante en la placa de la Fuente que impide la transferencia de calor hacia el medio, congestiona los espacios y promueve la corrosión. Agua y agentes corrosivos: Deterioran y corroen la circuitería, así como los componentes de la placa. También pueden provocar cortocircuitos entre los elementos. Útiles necesarios para el mantenimiento a) preventivo. • Brocha • Aspiradora portátil • Spray anticorrosivo • Destornillador de estría y paleta. b)correctivo. • Osciloscopio • Multímetro digital o analógico • Pistola de soldar o cautín • Maleta de herramientas 2.4.1 Mantenimiento Preventivo Pasos a seguir para efectuar el mantenimiento preventivo. 1. Desarmar el equipo. 2. Limpiar el polvo con la brocha y la aspiradora portátil. 3. Aplicar spray anticorrosivo a la placa para limpiarla. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 64 4. Armar el equipo. 5. Limpiar externamente con la brocha. 2.4.2 Mantenimiento Correctivo La secuencia de pasos generales para comprobar el funcionamiento de una fuente ATX, es la que se describe, aunque el especialista puede violar el orden de las acciones, teniendo en cuenta su experiencia en cada tipo de fallo: 1. Revizar la etapa de entrada de la fuente sin energizarla, donde se comprueban las siguientes partes: • Interruptor de conexión-desconexión de la fuente. • Fusible de entrada. • Termistores de protección que pueden estar abiertos o en corte, según la posición que ocupan en el circuito. • Resistencia de protección de Irush Current. • Comprobar de los varistores de protección de entrada (MOV). • Condensadores electrolíticos de entrada. Se comprueban visual y eléctricamente. • Puente de diodos de entrada. • Interruptor de selección de 110-220v. • Resistencias de descarga de los condensadores de entrada. 2. Energizar la fuente y medir el voltaje de directa presente entre los polos positivos y negativos de los condensadores. Debe tenerse en cuenta que la tierra para esta medición será el borde negativo del condensador. 3. Medir el voltaje de alimentación de la pastilla reguladora para saber si esta posee alimentación que puede provenir de dos vías: • De la misma salida de la fuente, caso en el cual la fuente debe estar trabajando para que se alimente la pastilla reguladora. • De la fuente auxiliar si está presente la señal PSON. 4. Comprobar la etapa de conmutación, que incluye dos pasos generales: • Comprobar el trabajo correcto de la pastilla reguladora. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. • 65 Comprobar la presencia de las señales de conmutación en las bases de los transistores de conmutación. • En este punto es importante tener en cuenta que los valores del pulso de conmutación en la base no pueden exceder los 0,7v positivos para los casos de transistores bipolares. Si el circuito es un par Darlington, entonces será aproximadamente el doble este valor y si se trate de un transistor FET, los valores pueden ser mayores hasta de 10v. • Tomar como referencia el emisor de cada transistor al medir . 5. Medir las señales en el punto medio de los transistores de potencia si son dos o en el colector del transistor si es uno. Se puede notar que si los flancos de las señales en el colector de los transistores están redondeados, significa que la fuente esta falta de carga y por tanto, debe aumentele la carga para que trabaje correctamente. 6. Medir las señales de salida del transformador de conmutación. 7. Medir la etapa de rectificación de salida y filtrado. 8. Medir de forma precisa los voltajes de salida. 9. Conectar al voltaje nominal de trabajo 110-220V y medir el valor del voltaje de 5VSB que debe estar presente en todo momento. Esta medición se puede realizar sin necesidad de estar conectada la carga. 10. Conectar el procesador y repetir el paso anterior. 11. Apretar el botón de encendido y comprobar si aparecen los restantes voltajes en los conectores de salida de la fuente. 12. Desconectar la carga y conectar a tierra la señal PSON y repetir las mediciones realizadas en los pasos 1 y 3. Las pantallas que aparecen en el Anexo 8, muestran las formas de onda en los puntos mas importantes del Modulador por ancho del pulso de conmutación. 2.5 UNIDAD CENTRAL DE LAS COMPUTADORAS PERSONALES Factores que atentan contra la vida útil de las Unidades Centrales. Los factores que atentan contra la vida útil de las Unidades Centrales de las Computadoras personales son el Calor, el Polvo, el Magnetismo y las Agua y agentes corrosivos. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 66 Calor: Todos los equipos electrónicos llevan dentro de sí la semilla de su propia destrucción. Más de la mitad de la potencia entregada a lo chips se disipa en forma de calor. Si este no es liberado rápidamente puede llegar a destruir los mismos. Polvo:El polvo crea una capa aislante en las tarjetas de la PC que impide la transferencia de calor hacia el medio, congestiona los espacios y promueve la corrosión. Magnetismo: Los imanes, tanto los permanentes como los de tipo electromagnéticos pueden causar la pérdida de los datos en los discos duros y diskettes. Agua y agentes corrosivos: Deterioran y corroen la circuitería, así como los componentes de la placa, también pueden provocar cortocircuitos entre los elementos. Otros factores: • Voltaje excesivo. • Voltaje insuficiente. • Picos transitorios de voltaje. • Aumentos de voltaje autoinducidos. Existe un conjunto de sugerencias que se deben tener en cuenta para evitar los riesgos antes señalados. • Revise lo referente a la alimentación eléctrica. • Trate de mantener la máquina en un rango de temperatura adecuado. • Controle el polvo excesivo. • Elimine las fuentes de vibración que puedan afectar la PC. • Aleje la máquina de aquellos equipos que provoquen campos magnéticos considerables. • No someta la PC a la acción corrosiva del agua. Útiles necesarios para el mantenimiento • Brocha • Aspiradora • Spray para cubiertas de plástico • Alcohol • Paño Técnico • Aceite • Discos limpiadores CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. • Software diagnóstico • Maleta de herramientas • Multímetro digital 67 2.5.1 Mantenimiento Preventivo Existe un procedimiento general que permite ejecutar el mantenimiento preventivo a las unidades centrales de las PCs. Pasos del Mantenimiento preventivo. 1. Realizar un diagnóstico general del equipo. 2. Entrar al SetUp y copiar los datos más importantes. 3. Apagar la PC. 4. Abrir la máquina. 5. Extraer las tarjetas, manteniendo su orden. 6. Extraer el microprocesador. 7. Aflojar el polvo con la brocha y luego eliminarlo con la aspiradora. 8. Verificar el estado de la pila y del ventilador del microprocesador en la tarjeta madre, lubricar este último de ser necesario. 9. Abrir la fuente de alimentación y remover el polvo de su interior. 10. Proceder a la limpieza y lubricación de la torre de floppy. 11. Conectar las tarjetas extraídas, así como el micro y cerciorarse que todo esté debidamente colocado y ajustado. 12. Alimentar la PC y proceder a dar mantenimiento al lector de CD y la torre floppy con los discos al efecto. 13. Si al concluir no hay ningún contratiempo, cerrar la máquina, limpiar exteriormente y por último verificar que esté trabajando correctamente. 2.5.2 Montaje de un ordenador Pentium IV El montaje de un ordenador Pentium IV, que incluye el de la tarjeta madre, con el microprocesador, el sistema de enfriamiento, la memoria y otras partes, representa un apreciable conocimiento para la detección de las fallas en estos complejos circuitos 2.5.2.1 Tarjeta Madre Antes de instalar la Tarjeta Madre se debe verificar que sea compatible con las características de la computadora. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 68 Si por ejemplo se desea instalar un Pentium IV, marca ASUS, tipo P4GE-MX, con un procesador de 1.70 GHz, socket 478, dos soportes para memorias DIMM del tipo DDR, sonido integrado, 6 puertos USB, 3 ranuras de expansión PCI (de color blanco) y una ranura AGP, es necesario analizar las condiciones. El socket 478 es físicamente más pequeño que cualquiera de las otras CPU en uso con socket 370, debido principalmente a las dimensiones más pequeñas empleadas para su fabricación, antes con 0.13 micras y actualmente con 0.09 micras. La CPU está diseñada con un pin faltante en una esquina, de modo que no se puede colocar en forma equivocada. 2.5.2.2 Preparación de la Tarjeta madre Para instalar la Tarjeta Madre se debe contar con un chasis que tenga dos tapas laterales que se aseguran con dos tornillos cada una y la parte frontal fija. Posteriormente se debe seguir el procedimiento que se describe: • Retirar los tornillos del lado izquierdo (visto desde el frente). • Observar que el área disponible para los ventiladores esté libre (parte anterior y parte posterior). • Verificar las «bahías» y «ranuras»: 5 bahías externas de 5 ¼, 1 bahía externa de 3 ½, 2 bahías internas de 3 ½, 7 ranuras de expansión y espacios para puertos de entrada/salida. • Todos los chasis vienen con un escudo E/S estándar con agujeros en los que puede encajar la mayoría de las Tarjetas Madres. • Instalar el escudo desde el interior del chasis. La parte plana que está estampada con símbolos que describen las funciones de los puertos queda hacia el exterior. • Verificar que en el lado interior, el escudo de E/S tenga los bordes de metal para ajustarse en el rectángulo abierto del chasis. • Instalar el ventilador. 2.5.2.3 Instalación del Microprocesador en la Tarjeta Madre • Levantar la palanca de seguridad del socket para abrir sus agujeros. • Levantar la palanca unos 90 grados. • Dejar caer el procesador sobre los agujeros. • Llevar la palanca a su posición original. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 69 2.5.2.4 Instalación de la Tarjeta Madre • Hacer una prueba de asentamiento de la Tarjeta Madre sobre el interior del gabinete, para lo cual, utilice ambas manos para sostener la tarjeta madre sobre los agujeros. • Contar la cantidad de agujeros comunes entre la Tarjeta Madre y el gabinete. • Retirar la Tarjeta Madre a un costado sobre su funda antiestática y tener a la mano la cantidad de separadores y tornillos necesarios para colocarlos sobre los agujeros comunes antes mencionados. • Verificar que los separadores preinstalados estén alineados con la Tarjeta Madre y los que no retirarlos. • Instalar un separador sobre cada uno de los agujeros coincidentes. Estos separadores, que vienen en cantidad suficiente con el gabinete, están estandarizados, su material es bronce, son del mismo tipo y tamaño, de modo que no haya problemas de desalineamiento con la Tarjeta Madre. • Puede colocar los separadores usando un alicate de punta plana o simplemente, con la mano, pero cuidando que ingresen por completo. • Una vez que se haya colocado la cantidad necesaria de separadores sobre el gabinete, vuelva a colocar la tarjeta madre dentro del gabinete, asegurando primero la zona que está junto al escudo. • Colocar tornillos de rosca fina sobre los separadores usando un destornillador. Una vez terminada esta labor, verifique que la tarjeta madre no esté inclinada o arqueada, porque debe estar perfectamente horizontal. • Observar que el escudo de E/S esté instalado apropiadamente; alineado en el chasis. Verificar que sobresalgan los puertos incorporados en la Tarjeta Madre para recibir el conector externo de los periféricos. • Instalar el conector eléctrico ATX a la Tarjeta Madre. Este conector de 20 pines está marcado con un gancho, de modo que puede ser instalado en un solo sentido. • Verificar que el gancho del conector ATX esté alineado con el gancho del conector de la Tarjeta Madre». En las Tarjetas Madres utilizadas por los procesadores Pentium IV se necesita un conector adicional proveniente de la fuente de alimentación, llamado ATX 12V. Cabe mencionar que las primeras placas madre Pentium IV usaban un conector auxiliar (AUX) de 6 pines similar al de las fuentes AT. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. • 70 Conectar el enchufe ATX 12V en los 4 contactos de la Tarjeta Madre, guiándose por el alineamiento de los ganchos. • El ventilador adicional se instala previamente y necesita de una alimentación de energía, por lo que en la Tarjeta Madre se debe ubicar un enchufe de 3 pines para conectarlo. De no disponer la Tarjeta Madre de un enchufe, se puede emplear un adaptador para algún conector molex proveniente de la fuente de alimentación. • Verificar la ubicación de los pines donde se conectan los cables provenientes del panel frontal .El interruptor de energía es el conector más importante del panel frontal (PW-ON = encendido), ya que sin él no se podría encender la fuente de alimentación para el suministro de energía eléctrica. Esta conexión no tiene polaridad, por lo cual se pueden colocar los dos pines en cualquiera de los sentidos. • Colocar el cable de RESET. • Colocar los cables correspondientes a las luces del panel frontal. En este caso, estos cables tienen polaridad, es decir, que tienen un polo positivo, representado por un cable de color verde o rojo y un polo negativo, representado por el cable de color blanco. • Proceder de la misma forma con los cables del HDD Led y del Power y así tendrá 4 cables de dos pines cada uno. Nota: Siempre debe consultar el manual o leer las señas en la placa para la colocación de estos cables. 2.5.2.5 Instalación del Sistema de Enfriamiento El Sistema de Enfriamiento para Pentium IV - socket 478 actualmente consta de 3 partes, a saber: • El módulo de retención que viene permanentemente montado sobre la Tarjeta Madre. • El clip de retención. • El Sistema de Enfriamiento que está formado por un gran disipador de aluminio y un ventilador atornillado en su parte superior. El disipador está diseñado de tal manera que maximice el área superficial para que pueda dispersar mejor el calor. Por esta razón, tiene una forma extraña que incluye aletas y ranuras. Bajo el disipador de aluminio hay un área rectangular oscura, donde se ha aplicado una fina capa de material térmico. Esto ahorra la necesidad de aplicar grasa térmica a la superficie de contacto entre el disipador y el procesador. El clip de retención es colocado sobre el disipador y todo el conjunto es colocado sobre el módulo de retención de la Tarjeta Madre. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 71 El clip de retención se acomoda holgadamente sobre el Sistema de Enfriamiento, con sus 4 clips alineados con los 4 agujeros en los parantes del módulo de retención. • Empujar el conjunto del Sistema de Enfriamiento hacia debajo, para asegurar los clips individuales en su sitio. • Escuchar que los clips hagan un pequeño sonido (un «clic») cuando son presionados sobre el módulo de retención. El Sistema de Enfriamiento quedará todavía un poco flojo. • Para asegurar el Sistema de Enfriamiento sobre el procesador, debe mover las dos palancas situadas encima del ventilador en direcciones opuestas. • Levantar ambas palancas y Ilevarlas hasta que lleguen al tope y se aseguren en posiciones opuestas. • En cuanto el Sistema de Enfriamiento sea colocado en su lugar, conectar su ventilador en el conector que normalmente está etiquetado como «FAN 1». Esto permite que el BIOS de la Tarjeta Madre controle la velocidad de giro del ventilador y lo pueda manejar en los modos de ahorro de energía (power saver) y de descanso (sleep). 2.5.2.6 Instalación de la Memoria RAM La Tarjeta Madre soporta 2 bancos de memoria DIMM del tipo DDR y para instalar un módulo de 256 MB se procede como sigue: • Verificar que los módulos DDR están marcados con una muesca que no está en el punto medio, para que no puedan insertarse de modo incorrecto. • Asegurarse que las palancas de seguro situadas a ambos lados de la ranura están separadas y que el tope de la ranura de la memoria DIMM está alineado con la muesca del módulo. • Colocar la memoria haciendo una ligera presión vertical con los dedos pulgares. • Observar que las palancas de seguro se levanten. • Considerar que las ranuras de memoria están enumeradas (DIMM 1y DIMM 2), por lo cual es recomendable que se llene el banco DIMM 1 y luego el DIMM 2. Algunas placas que tienen el video incorporado lo exigen. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 72 2.5.2.7 Instalación del Disco Duro • Verificar que el disco duro tenga dos conectores, al igual que la disquetera. Adicionalmente tiene una zona de jumpers para su configuración como maestro o como esclavo y es recomendable configurarlo como maestro. • Instalar desde el interior del gabinete en la bahía de 3 ½´´ que está debajo de la bahía usada por la disquetera. • Ubicar la posición que logre alinear los agujeros del disco duro con los del gabinete. • Asegurar la unidad con 4 tornillos de rosca gruesa, es decir, dos a cada lado. 2.5.2.8 Instalación del Lector de Disco • El lector de CD-ROM lleva dos conectores en su parte trasera y una zona de jumpers para la configuración maestro/esclavo. En este caso, se configurara el lector de CD como unidad maestra debido a que trabajará con su propio cable flat. • Retirar la tapa de plástico de una de las bahías externas de 5 ¼´´ y se acostumbra a emplear la que está en la parte más alta. • Insertar la unidad lectora de CD desde afuera hacia adentro hasta hacer coincidir los agujeros de la lectora con los agujeros del gabinete. • Asegurarla con 4 tornillos de rosca fina. 2.5.2.9 Instalación de la Disquetera • La disquetera tiene dos conectores, uno para la electricidad y otro para los datos y no se necesitan colocar jumpers para configurarla. Sin embargo, para no cometer posteriores errores de conexión es importante examinarla de cerca antes de instalarla, para ubicar el terminal del pin 1 que debe estar impreso en la serigrafía de la tarjeta que forma parte de la disquetera. Por lo general, salvo pocas excepciones, el pin número 1 se ubica en la zona interna del conector de datos y rara vez se ubica en el extremo. • Para comezar el montaje de la disquetera, debe retirar la tapa plástica que viene en la bahía interna de 3 ½’’ del gabinete, si fuera el caso de gabinetes antiguos. En la mayoría de los actuales gabinetes, la disquetera se debe colocar por la parte posterior hacia la parte frontal. • Una vez que ha encontrado la posición correcta, la disquetera debe asegurarse con 4 tornillos de rosca fina, dos a cada lado. • Al terminar debe comprobar la correcta expulsión de un disquete colocado desde afuera. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 73 2.6 MONITORES DE TRC Factores que atentan contra la vida útil de los monitores. Los factores que atentan contra la vida útil de los monitores son el Calor, el Polvo, el Magnetismo, el Agua y los Agentes Corrosivos. Calor: Todos los equipos electrónicos llevan dentro de sí la semilla de su propia destrucción. Más de la mitad de la potencia entregada a lo chips se disipa en forma de calor. Si este no es liberado rápidamente pueden destruirlos. Polvo: Crea una capa aislante en la placa del monitor que impide la transferencia de calor hacia el medio, congestiona los espacios y promueve la corrosión. Magnetismo: Los imanes, tanto los permanentes como los de tipo electromagnéticos pueden causar daño al TRC. Agua y agentes corrosivos: Deterioran y corroen la circuitería así como los componentes de la placa, también pueden provocar cortocircuitos entre los elementos. Útiles necesarios para el mantenimiento a) preventivo. • Paño • Alcohol isopropílico • Algodón • Brocha • Aspiradora portátil • Spray anticorrosivo • Destornillador de estría y paleta • Spray de espuma B) correctivo. • Documentación técnica • Multímetro digital o analógico • Osciloscopio • Estaño • Pasta de soldar • Soldador • Maleta de herramientas CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 74 2.6.1 Mantenimiento Preventivo Pasos a seguir para efectuar el mantenimiento preventivo. 1. Comprobar el funcionamiento del equipo. 2. Abrir el equipo. 3. Limpiar sus partes interiores aplicándole Spray anticorrosivo. 4. Ajustar los controles interiores de ser necesario. 5. Cierrar y comprobar el funcionamiento del equipo. 6. Limpiar sus partes exteriores con Spray de espuma. 2.6.2 Mantenimiento Correctivo Para efectuar el Mantenimiento Correctivo es necesario acudir a la búsqueda de fallas y de métodos de reparación por partes, como se verá a continuación 2.6.2.1 Fuente de alimentación Una de las causas más frecuentes de fallos son las soldaduras frías, que se producen durante la fabricación si no fueron calentadas lo suficiente, se enfriaron muy rápido o si se movió el pin de algún componente antes de que se solidificara y esto provoca fallos aleatorios por lo cual se recomienda revisarlas preventivamente. Las vibraciones y los componentes mal fijados mecánicamente pueden deteriorar las soldaduras. No enciende el monitor 1. Comprobar que el monitor no esté en modo de ahorro de energía (parpadea el led de encendido o tiene color naranja). 2. Realizar inspección visual luego de abrir el monitor. 3. Revisar el conmutador de encendido. 4. Revisar si se fundió el fusible: • Revisar el varistor MOV (metal oxide varistor). • Revisar las resistencias fusibles que se van junto con el fusible. Comúnmente son de valores bajos (2 ohm) y deben ser sustituidos por el mismo tipo. • Revisar los transistores de salida horizontal y el de conmutación de la fuente. • Revisar los diodos de la cuarteta y el filtro de entrada. • Revisar el posistor del desmagnetizador. 5. Revisar si el fusible está intacto: • Revisar el circuito de arranque. • Revisar el CI controlador. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. • Comprobar que los pulsos lleguan al transistor de conmutación. • Hay un diodo en el puente rectificador malo (no hay voltaje suficiente). 75 6. Identificar el tipo de fuente empleado y delimitar sus partes componentes. Si la fuente es de PULSOS. • Comprobar si el CI modulador de ancho de pulso PWM recibe voltaje de arranque, si oscila y si emite pulsos. Recuerde que en ocasiones es necesario inhibir la protección del CI para que emita los pulsos. • Comprobar el circuito de excitación de los transistores de conmutación (para los bipolares). • Revisar los transistores de conmutación y su circuito de polarización. • Cuando se trata de una fuente con autoregulación con CI del tipo STR, debe trabajar con carga. Si la fuente es LINEAL. • Revisar los enrollados del transformador (en ocasiones existe un fusible en el primario) • Cuando tiembla la imagen o hay rizado, comprobar los filtros y zeners en la fuente. • Comprobar el circuito de regulación del voltaje de salida. Flashea el LED • Se está disparando la fuente y se recomienda revisarla. • El monitor se encuentra en régimen de bajo consumo, revisar si le llegan los pulsos de sincronismo al circuito detector. Se siente chillido extraño • Apague de inmediato, porque hay algún componente en corto que provoca un sobreconsumo ó está fallando el CI controlador. Hay ondulación en la pantalla por interferencia de AC • Cuando hay rizado, comprobar los filtros y zeners en la fuente y ver si el CI responde a error de voltaje, en las fuentes de pulso se tiende a eliminar este problema. • Se recomienda usar UPS (Uninterruptible Power Source). • Alejarlo de lavadoras, aires acondicionados o refrigeradores que pueden producir caídas y picos de voltaje. • Revisar las conexiones eléctricas en el local. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 76 Se siente zumbido en el monitor • Puede haber interferencia de la baja frecuencia vertical o del voltaje AC de la línea. • Si el monitor tiene ventilador interno puede estar provocando el ruido. • Si el monitor no está conectado a la tarjeta controladora, el circuito horizontal puede estar oscilando libre a una frecuencia audible menor de 20 Khz. • Apretar los tornillos. • Cuando está vibrando algún transformador o el yoke, se debe sellar con resina epóxica. 2.6.2.2 Circuito de barrido horizontal y generación de la alimentación del TRC El circuito de generación del barrido horizontal es junto a la fuente de alimentación, la parte más problemática del monitor, por los niveles altos de voltaje que utiliza y porque algunos componentes trabajan calientes. Se estudiaran algunas fallas. No se ilumina la pantalla 1. Recordar que en los monitores BLANK SCREEN, la pantalla se mantiene oscura hasta que recibe la señal de video. 2. Regular el Brillo. 3. Regular el screen 4. Comprobar de manera visual o midiendo en el conector del TRC que enciende el filamento. 5. Comprobar que estén presentes los siguientes voltajes con la polaridad correcta: • Brillo (G1) • Screen (G2) • Foco (G4) 6. Si no hay estática en la pantalla es que no hay alto voltaje. No hay alto voltaje Si no hay estática en la pantalla, rastree pulsos a lo largo del circuito de generación de alto voltaje. • Asegurarse que llegue alimentación al primario del flyback (B +), proveniente de la fuente entre 80 - 150 volts regulables. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. • 77 Si dejó de oscilar el circuito horizontal, revisar el circuito de protección por sobrevoltaje (HOLD-DOWN) que pudo disparar al oscilador .El circuito también puede dispararse por la rotura de algún componente propio o porque está muy sensible. • Medir la señal en el colector de salida horizontal que no debe tener • Puede estar roto el triplicador y debe ser sustituido. • El yoke horizontal puede estar en corto circuito o abierto. Ver la comprobación del estado del yoke. • Si están todos los pulsos y no hay alto voltaje, entonces se rompió el flyback.Revisar que no esté muy caliente el cuerpo del flyback, que no se produzcan arcos externos de alto voltaje o el núcleo no esté partido. Se puede comprobar si hay corto circuito entre el enrollado primario y secundario o si está abierto algún enrollado. • Los monitores monocromáticos necesitan señal de Hsync del controlador para generar el alto voltaje. • Revisar las soldaduras y contactos. Cuando sube mucho el H.V. el TRC se ve más brilloso y esto puede ocurrir por lo siguiente: • Aumenta excesivamente el voltaje B+ debido a roturas en el circuito de regulación de la fuente. • Mal funcionamiento del circuito de regulación del alto voltaje. • En los monitores multiscan, al fallar el detector de modo, sube mucho el HV al variar frecuencia de oscilación. Entonces los capacitores recortadores están malos y son los conectados en el colector del circuito de salida horizontal. Hay arco o sonido por el salto del alto voltaje 1. Revisar los capacitores en el colector del transistor de salida horizontal. 2. Salto en el ánodo del TRC (visible ó audible), limpiar polvo y carbón alrededor y bajo la tetera, asegurarse que no hay cables sueltos. 3. Salto en los chisperos TRC o en los bulbos de descarga de gas (parecen lámparas de neón, contienen mezcla de gas y controlan el exceso de voltaje): • Potenciómetro Foco/Screen abierto (ver si se puede sustituir), el fallo viene acompañado de fluctuaciones o pérdida del enfoque y el brillo. • Excesivo HV (regulador de alto voltaje malo). • Corto dentro del TRC. 4. Salto en flyback, sonido peculiar, rajadura o perforación en el cuerpo del flyback. Eliminar el polvo y el carbón para prevenir los arcos, limpiar con alcohol, sellar. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 78 Sale la imagen opaca Ajustar el Foco, si no ajusta: • El circuito para obtener el voltaje para la rejilla del foco (4-8kv) incluye resistencias y condensadores, que pueden cambiar su valor al calentarse. Para determinar si es algún componente o el TRC que por envejecimiento no permite ajustar el foco debidamente, retire la tarjeta con los amplificadores de video, encienda el monitor y déjelo trabajar algun tiempo, luego mida con un metro de alto voltaje si varía el voltaje del foco, reinstale la tarjeta y vea si falla. Así podrá determinar si es el tubo de pantalla o algún componente. • Hay un salto de alto voltaje dentro del potenciómetro del FOCO o desde el conector del Foco a la tierra de la tarjeta. Trate de eliminar el salto o sustituya el divisor. • Ajuste el Foco una vez caliente el monitor. Aparece una línea vertical en la pantalla 1. Disminuir el Brillo de la imagen para que no se manche la pantalla. 2. La ausencia de barrido horizontal puede ocurrir por: • Falso contacto en el conector del YOKE. En la entrada del yoke deben verse los mismos pulsos que aparecen en el colector del circuito de salida horizontal. • Abierto el condensador de desacople u otro componente conectado directamente a la bobina de desviación horizontal. • Abierta la bobina de desviación horizontal producto de saltos de alto voltaje (es frecuente que ocurran saltos de alto voltaje entre la tetera y el yoke horizontal, lo cual se puede prevenir, dando mantenimiento con un trapo seco al espacio de cristal entre ellos para eliminar el polvo que pueda intensificar el salto. • Revisar los controles y las soldaduras. Cuando aparece un punto en el centro de la pantalla es que faltan tanto el barrido vertical como el horizontal. No se sincroniza el barrido horizontal 1. Comprobar que el conector de video está bien insertado en el controlador. 2. Comprobar con los potenciómetros PHASE HOR, H. HOLD. 3. Comprobar que tanto en el procesador, como en el controlador están bien seteados los jumpers que definen el modo de video, revisar si la frecuencia de barrido es aceptada por el monitor. 4. No llega la señal de sincronismo horizontal al CI oscilador, revisar el conector y el cable. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 79 5. Comprobar que llegue al CI controlador la señal de comparación para el trabajo del AFC control automático de frecuencia y el detector de fase. Ver que en el pin del oscilador del CI la señal diente de sierra tenga la frecuencia correspondiente al modo en que se trabaja. 6. Comprobar el funcionamiento del detector de modo y el corrector de polaridad del sincronismo si el monitor es multisync. Prestarle atención a los conmutadores analógicos 4053, 4066 si estan. Imagen no es recta por los costados 1. Hay problemas de distorsión de barril, ajustable con: • Potenciómetro E.W. APL ó SIDE PINCUSHION. • En algunos monitores hay bobinas a ambos lados del YOKE para realizar este ajuste. 2. Si no logra ajustar: • Revisar el circuito encargado de esto. • Orientar el monitor hacia el este. 3. Si el YOKE está flojo, puede correrse hacia atrás y en ese caso la imagen aparecerá redondeada. 2.6.2.3 Circuito de barrido vertical Aparece una franja horizontal en la pantalla 1. Disminuir el brillo de la imagen para que no se manche la pantalla. 2. Si la pantalla está medio cerrada sin distorsión: • Revisar si la frecuencia de barrido es aceptada por el monitor. • Comprobar si existe un problema de ajuste en V.SIZE. • Revisar los filtros de la etapa de barrido vertical. 3. Si la pantalla esta cerrada (línea horizontal en el centro de la pantalla) puede ocurrir por: • Falso contacto en el conector del YOKE. • Roto el condensador de desacople u otro componente conectado directamente a la bobina de desviación vertical. • Abierto el yoke vertical. • Revisar controles y soldaduras. Nota: si aparece un punto en el centro de la pantalla es que faltan tanto el barrido vertical como el horizontal. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 80 No se sincroniza el barrido vertical (scroll de la imagen) • Comprobar que el conector de video esté bien insertado en el controlador. • Ajustar con el potenciómetro V. HOLD. • Comprobar que en el procesador y en el controlador están bien seteados los jumpers que definen el modo de video. • Revisar el circuito de barrido vertical. • Ver que en el pin del oscilador del CI, la señal diente de sierra tiene la frecuencia correspondiente al modo en que se trabaja. • Comprobar el funcionamiento del detector de modo y el corrector de la polaridad del sincronismo si el monitor es multisync. Prestarle atención a los interruptores analógicos 4053, 4066 si existen. 2.6.2.4 Amplificador de video No sale video y hay alto voltaje • Ajustar el brillo y el contraste, si es necesario regular el SCREEN. Tener en cuenta que si se aumenta mucho el Brillo ó el Screen, se reduce la vida útil del tubo. • Comprobar que el controlador de video está bien insertado en la ranura del procesador. Cambiar el controlador. • Comprobar que no estén partidos ni doblados los pines del conector de video y revisar el cable de entrada de video. • Ubicar y comprobar el funcionamiento del preamplificador y del amplificador de video. Medir la señal de video a la entrada de los cañones. Cuando no llega, rastrearla por todo el circuito, que puede haber algún cañón defectuoso. • Asegurarse que encendió el filamento. No salen los colores OK • Cuando salen manchados, comprobar que está conectada la bobina desmagnetizadora y eliminar los campos magnéticos cercanos. • Apretar la tecla DEGAUSS si existe. • Apagar, esperar 20 minutos y encender el monitor. • Cuando hay desbalance de colores, ajustar el BIAS (nivel de negro) para cada cañón. • Ajustar DRIVE (intensidad) para 2 cañones. • Revisar los transistores en la última etapa de amplificación del video. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 81 Nota: Se debe lograr el blanco perfecto y auxiliarse de algún TEST que tenga el patrón de colores. Puede que algún cañón esté vencido o fundido y entonces el ajuste se hará difícil. Sale el barrido en el fondo • Disminuir SCREEN. • Revisar que se produzcan los de borrado BLANKING PULSES. • Comprobar que los pulsos de borrado le lleguen al TRC. • Muy alto el voltaje B+. 2.6.2.5 TRC Hay un corto en el TRC Los corto circuitos se producen entre rejillas próximas. Muchas veces durante la fabricación del tubo pueden caer dentro basuras y limallas que con el tiempo provocan el corto circuito entre elementos cercanos. Existen aparatos especiales rejuvenecedores de TRC. • Corto entre FILAMENTO-CÁTODO. Es el más frecuente, el síntoma principal es la saturación de algún color pues el cátodo es llevado a 0v como referencia del filamento. • Corto entre CÁTODO-REJILLA G1. Afecta a todos los colores y se pone la imagen muy brillosa dando la sensación de un negativo. • Corto entre REJILLAS G1-G2. La pantalla se pone oscura. • Corto entre REJILLAS G2-FOCO. Muy iluminada la pantalla y visible el retroceso. • Corto entre FOCO-ALTO VOLTAJE. Cae el H.V, se produce un arco en el chispero del foco, se funde el fusible o se daña el transistor de salida horizontal. Comprobación del estado del yoke • Si por alguna razón tiene que desconectar el yoke, disminuya el brillo al encender el monitor, para no quemar el fósforo de la pantalla. • Revisar las formas de onda en el conector de yoke. • Revisar el aislamiento (laca). • Cuando hay un daño menor en los cables y es posible repararlo, limpiar bien el área, empatar los cables y aíslarlos con barniz de alta temperatura. Luego medir la resistencia de 5-10 ohm aprox. para el vertical, que es el enrollado externo con CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 82 alambre más fino. El horizontal va pegado al cuello con alambre más grueso y puede medir de 0.5 a 3 ohm. • Emplear otro yoke para determinar si el fallo no está en otro componente. Se percibe distorsión geométrica de la imagen: • El yoke se corrió hacia un lado o hacia detrás. Sustituir su anilla de fijación. Al repararlo se debe tener cuidado para no desajustar la convergencia y purity. No eliminar los fijadores de goma. • Efectuar el ajuste de geometría con ayuda de imanes alrededor del Yoke. No están alineados los 3 haces de colores: • Comprobar que no haya interferencia electromagnética externa. • Realizar el ajuste de convergencia y purity. 2.6.3 Teoría de operación del procesador Horizontal y Vertical TDA 4855/ TDA 4858 PIN 1. El control automático en frecuencia (AFC) sirve para sincronizar el segundo estado de deflexión horizontal, con el primer estado o pulso de sincronimo horizontal. PIN 2. El Hold Down es un circuito de protección también llamado Shut-Down o X-Ray. Cuando el valor del diseño es mayor o igual a 6.14v, se activa y se termina la excitación horizontal. PINES 3,4,5,6. En estos pines se origina el control del +B a partir de la frecuencia que este manejando la resolución ocupada, es decir, que incrementa el nivel de voltaje al incrementar la resolución. PIN 7. En este pin se lleva a cabo el inicio del proceso de excitación horizontal, es decir, el control de la transferencia de energía del primario del transformador (Fly Back), tomada a partir del +B al secundario. PINES 8,10,25. Se conectan a tierra. PIN 9. Se alimenta el circuito integrado con +12 v. PIN 11. Se genera la onda de forma parabólica para compensar las deformaciones laterales. PIN 12 Y 13. Se da inicio al proceso de deflexión vertical. PIN 14. Entra el pulso de sincronismo vertical. PIN 15 Entra el pulso de sincronismo horizontal. PIN 16. Proporciona 2 pulsos, el Clamp y el Blanking, los cuales vienen superpuestos. CAPÍTULO 2. MANTENIMIENTOS PREVENTIVO Y CORRECTIVO. 83 PIN 17. Se controla el centrado vertical (V-Center). PIN 18. Se controla la altura vertical (V-Sise). PIN 19. Se controla el efecto llamado paralelogramo. PIN 20. Ajuste trapezoidal. PIN 21. Se controla el efecto llamado Pincushion. PIN 22. Se define la Ganancia vertical o Amplitud durante el cambio de resolución. PINES 23, 24. Se define el intervalo de la frecuencia del barrido vertical. PINES 27,28,29. Se define el intervalo de la frecuencia de barrido horizontal. PIN 30. Se corrige la posición horizontal. PIN 31. Intervalo de la fase horizontal. PIN 32. Encendido suave. En el Anexo 9, aparece el esquema eléctrico del procesador H-V TDA 4858, donde se pueden observar los terminales señalados y en el Anexo 10, se muestran las formas de onda de las mediciones en los puntos del procesador H-V TDA 4858 del monitor ACER 7134E. CAPÍTULO 3. PAGINA WEB 84 CAPITULO 3. PAGINA WEB SOBRE MANTENIMIENTO En este Capítulo se aborda lo referente a la confección de la página WEB de la figura 3.1, la cual constituye una importante herramienta para todo el que desee informarse sobre el Mantenimiento a los Equipos de Computación mas empleados en la Universidad Central de Las Villas. Para su diseño se emplearon los programas Macromedia Fireworks MX 2004 y el Macromedia Dreamweaver MX 2004. La página consta de una presentación inicial, donde aparecen un conjunto de opciones para el usuario. En el extremo izquierdo de la pantalla se encuentra el botón Inicio, el cual al presionarlo con el puntero muestra la introducción del trabajo, así como una descripción de las facilidades que encuentra el interesado para su información en el resto de la página, o sea, como navegar dentro de ella, en la figura 3.1 se muestra la página de presentación. Fig 3.1 Página WEB A la derecha del botón Inicio, aparecen por su orden las siguientes opciones Ratón y Teclado, Impresoras, Fuente ATX, UPS, Unidad Central y Monitores. Al habilitar cada uno de estos botones, se ofrece primeramente una descripción del funcionamiento de cada uno de ellos y en el caso de la Unidad Central se brinda la descripción de la arquitectura de las computadoras mas usadas en la UCLV. También se encuentran tres nuevos enlaces, los cuales se nombran Mantenimiento Preventivo, en el cual se explican los pasos a seguir en este tipo de actividad, así como las herramientas y accesorios a utilizar y Mantenimiento Correctivo, donde se describen las herramientas, accesorios y muchos procedimientos y/o información para detectar las fallas. CAPÍTULO 3. PAGINA WEB 85 Otro enlace que aparece es el de Procedimiento Práctico, donde se describe el uso de la herramienta de diagnóstico PC-CHECK 5.65, la cual da la medida del estado de estos dos accesorios y con fotos que muestra su realización por pasos. Para Impresoras se describe detalladamente el procedimiento de desarme y mantenimiento de un cabezal de nueve pines empleado en las impresoras EPSON-LX 300 y se observan fotos de cada paso a seguir. En el punto Fuente ATX se brinda una guía para el trabajo de reparación de este tipo de fuente, también se muestran fotografías de las señales y voltajes vistas desde un osciloscopio del CI TL494 (PWM), mayormente utilizado en estas fuentes. Para la UPS se hace referencia particularmente a la del tipo CENTELA 6.25, se brinda una guía con la metodología para su reparación y fotografías de las señales y voltajes, vistas desde un osciloscopio del MICRO. Luego le sigue la opción Unidad Central, la cual ofrece una guía completa del ensamblaje de una Pentium IV, específicamente sobre una Placa Madre del tipo ASUS P4GE-MX. Por último, sigue la opción Monitores, donde se hace referencia a los que usan TRC. Se ofrece una guía general de reparación por partes, comenzando por la Fuente de Alimentación y terminado en el TRC. Se describe además la función de los pines del procesador horizontal-vertical TDA 4858 utilizado en los monitores de modelos ACER, así como fotografías de las señales y voltajes vistas desde un osciloscopio. CONCLUSIONES Y RECOMENDACIONES 86 CONCLUSIONES Y RECOMENDACIONES 1. Con el presente trabajo se incrementa el conocimiento sobre el funcionamiento de algunos de los equipos y accesorios que conforman el bloque computacional, así como los procedimientos de los mantenimientos preventivo y correctivo que se le aplican. 2. Se cuenta con una información enriquecida en un orden lógico que le facilita al futuro ingeniero o técnico el desempeño de su actividad en el mantenimiento preventivo y correctivo con algunos de los equipos y accesorios que conforman un sistema informático. 3. Se dispone de una página WEB que facilita el acceso a la información y que puede ser enriquecida. 4. Se recomienda continuar enriqueciendo la página con mayor número de equipos y de procedimientos. REFERENCIAS BIBLIOGRÁFICAS 87 REFERENCIAS BIBLIOGRÁFICAS 1. Leal Moya, Lázaro:.Circuitos Básicos de los Monitores de Computación. Manual y Metodología de Reparación. 2. Copextel 2005:Curso de Monitores ACER.. 3. Cabrera, Igor: Elementos Generales de las UPS. 4. Copextel 2005: Metodología de Prueba de la UPS CENTELA 625. 5. Martínez, Alain: Estado del Arte de los Sistemas de Computación tipo Desktop para Máquinas IBM Compatible. 6. Silva, Francisco J: Introducción a las fuentes ATX. Principios de Funcionamiento y Metodología para la Comprobación y Reparación. 7. Impresoras. http:// www.monografías.com 8. Mouse. http:// www.monografías.com. 9. Teclados. http:// www.monografías.com. ANEXOS ANEXOS 88 ANEXOS Anexo 1 Esquema eléctrico de la UPS CENTELA 625 89 ANEXOS Anexo 2 Esquema eléctrico y componentes fundamentales de una fuente ATX 90 ANEXOS 91 ANEXOS 92 Funciones de los componentes electrónicos fundamentales de una fuente ATX A continuación se describen las funciones fundamentales de los principales componentes electrónicos de una fuente ATX. La descripción se ha elaborado de forma organizada, partiendo de la entrada hacia la salida, según el esquema eléctrico Fusible 250v/ 3 A: Se utiliza para la protección de sobre - corriente en la entrada. TH1 (termistor): Protección de Irush Curret. Durante el encendido se produce una alta demanda de corriente en la entrada y para contrarrestar este efecto, se utiliza esta resistencia que aumenta su valor proporcionalmente con su temperatura en muy corto tiempo. (BD1): Rectifica el voltaje de onda completa en la entrada de 110V obteniéndose a su salida 150V, que es el resultado de multiplicar por raíz de 2, el valor del voltaje de entrada. C1 y C2: Condensadores de entrada, que tienen como función suministrar un voltaje directo de 300V al circuito de conmutación. Su valor influye directamente en la potencia de salida de la fuente. R2 y R3: Descargan los condensadores de entrada, una vez retirada la alimentación de la red. C3 1mf/50v: Condensador de desacople de carga del primario del transformador. Impide el paso de la corriente directa al primario del transformador. Q1 y Q2: Transistores de conmutación, trabajan en contra-fase, cuando conduce uno, el otro está abierto y viceversa. D1 y D2: Diodos Damper, su objetivo es proteger a los transistores de conmutación de los voltajes de pico inverso. R4 y C4: Conforman la red de compensación del primario del transformador principal de conmutación. T1: Transformador principal de conmutación, es un transformador reductor con el núcleo de ferrita, cuya función es convertir los pulsos de conmutación de alto voltaje del primario, en pulsos de conmutación de bajo voltaje en el secundario. Fuente auxiliar formada por: (ZD1, Q3, D7, C10, R16, R71, R14, R13, R15, C8, C7, D6). Tiene como función proporcionar el voltaje de 5V de Stand By (SB) y darle el voltaje necesario al PWM (modulador de ancho de pulso) cuando se activa el PSON. ANEXOS 93 ZD1 (zener): Se utiliza para la protección del electrodo compuerta del transistor Mosfet contra los picos de voltaje por encima de los 15V, porque se dañan cuando el voltaje de la compuerta excede los 20V. Q3: Transistor Mosfet, trabaja como un oscilador en la fuente auxiliar. R69: Resistencia de arranque, garantiza el voltaje de arranque del oscilador de la fuente auxiliar. T3: Transformador de conmutación de la fuente auxiliar, además suministra la retroalimentación positiva del oscilador. C11 y R21: Conforman una red de compensación del secundario del transformador T3. D12 y D13: Diodos damper de los transistores de salida Q4 y Q5. Q4 y Q5: Conforman los pulsos que se le aplican al primario de los transformadores de salida de los transistores de conmutación principal. T2: Transformadores de salida, sirven para conformar los pulsos que se aplican a la base de los transistores de conmutación principales. BD1, BD2, BD3, BD4: Rectifican los pulsos de salida del transformador T1 de conmutación. L1, L8 y C26: Filtro de salida. R66: Resistencia de carga de los –12V. L5 y C31: Filtro de salida. 7805: Regulador de los 5V para la obtención de los 5VSB. D11: Diodo de conmutación para rectificar los pulsos de salida de la fuente autooscilante. L7 y C27: Filtro de salida para los 5V. VR2, C36, Q14, TL431: Conforman la regulación de los 3,3V. L2, L6, C34, C35: Filtro tipoπ. Q6, Q7, R33, R31, R32, C87, R56, R24, C14: Conforman el circuito de encendido que funciona de la siguiente forma: R32 es la resistencia de PULL UP para garantizar el valor inicial de PSON de 3,2v. Una ves que PSON se pone a cero Q7 se corta, Q6 se satura y el voltaje del cátodo de D10 se aplica a través de R24 al pin 12 del TL494. R 568ohm: Resistencia de sensado de –12V. ANEXOS 94 R 663ohm: Resistencia de sensado de 5V. R 57 y R55: Divisor de voltaje de sensado de –12V y 5V. Q12, Q13 y R47: Circuito de generación de POWER GOD. Q9: Circuito para el control de los pulsos de salida del TL494 durante el apagado y el encendido de la fuente. Q8: Aplica un voltaje de control de Deat Time al pin 4 del TL494 en función de los voltajes de sensado. C15 y R15: Circuito RC de fijación de la frecuencia de trabajo del TL494. C22 y R22: Circuito retroalimentación de los amplificadores de sensado del TL494. VR1 y R39: Regulación de los voltajes de salida. R37 y R39: Fijan el voltaje de referencia del amplificador operacional del TL494. R28 y R24: Fijan el voltaje de referencia del segundo amplificador operacional del TL494. PWM TL494: Modulador por ancho del pulso, varía el ancho del pulso de conmutación en dependencia de los valores de corriente y voltajes de salida ANEXOS Anexo 3 Esquema eléctrico del Modulador por Ancho del Pulso TL494 95 ANEXOS Anexo 4 Tarjetas Madres mas usadas en la Universidad a) AX3L 96 ANEXOS b) MX3W-Pro c) MX3S 97 ANEXOS d) e) MX3S-T MX36LE-UN 98 ANEXOS f) g) AX4BS-Pro MX4GVR 99 ANEXOS h) P4P800 100 ANEXOS 101 ANEXOS 102 ANEXOS 103 Anexo 5 Secuencia de pantallas del Programa de Diagnóstico HIRENS 8.2 Fig.1 Fig.2 Fig.3 Fig.4 Fig.5 ANEXOS 104 Fig.6 Fig.7 Fig.8 Fig.9 Fig.10 Fig.11 ANEXOS 105 Fig.12 Fig.13 Fig.14 Fig.15 Fig.16 Fig.17 ANEXOS 106 Fig.18 Fig.19 Fig.20 Fig.21 Fig.22 Fig.23 ANEXOS 107 Fig.24 Fig.25 Fig.26 Fig.27 Fig.28 ANEXOS 108 Anexo 6. Mantenimiento al cabezal de la impresora EPSON LX-300 Fig. 1 Fig.2 Fig.3 Fig.4 Fig.5 Fig.6 ANEXOS 109 Fig.7 Fig.8 Fig.9 Fig.10 Fig.11 Fig.12 ANEXOS 110 Anexo 7 Voltajes del microprocesador de la fuente CENTELA 625 (Modo normal). Fig.1 pin 1, 2, 5, 7, 8, 12, 15, Fig.2 pin 3 (5v) 22, 24, 28 (5v) Fig.3 pin 4, 6, 9, 10, 11, 13, 14, 18, 20, 21, 23 (0v) Fig.4 pin 16 (4v) Fig.5 pin 17(4v) Fig.7 pin 25 (5v) Fig.8 pin 26 (4v) Fig.6 pin 19(4v) ANEXOS 111 (Modo inversor). Fig.1 pin 1, 2, 7, 8, 9, 11, 12, Fig.2 pin 3 (5v) 15, 19, 20, 21, 24, 28(5v) Fig.4 pin 16 (4v) Fig.3 pin 4, 5, 6, 10, 13, 14, 18, 22, 23, 25(0v) Fig.5 pin 17 (4v) Fig.6 pin 26 (4v) ANEXOS 112 Anexo 8 Mediciones en el Modulador por ancho del pulso PWM TL- 494. Fig.1 pin 1, 2, 8, 11 (2v) Fig.2 pin 3, 6 (3.5v) Fig.3 pin 4, 7, 9, 10, 16 (0v) Fig.4 pin 5 (3v) Fig.5 pin 12 (16v) Fig.13 pin 13, 14, 15 (5v) ANEXOS Anexo 9 Esquema eléctrico del procesador H-V TDA 4858 113 ANEXOS 114 Anexo 10. Mediciones en los puntos del procesador H-V TDA 4858 del monitor ACER 7134E Fig.1 pin 1 (7v) Fig.2 pin 2, 17, 18, 19, 20, Fig.3 pin 3, 5 (2.5v) 21, 26, 27, 30, 32 (5v) Fig.4 pin 4 (2v) Fig.5 pin 6 (1v) Fig.6 pin 7 (1.7v) Fig.7 pin 8, 25 (0v) Fig.8 pin 9 (12v) Fig.9 pin 10 (7v) Fig.10 pin 11 (1v) Fig.11 pin 12, 13, 22, 23, Fig.12 pin 14 (5v) 28(3v) ANEXOS Fig.13 pin 15 (5v) Fig.14 pin 16 (2v y 5v) Fig.16 pin 29 (6v) 115 Fig.15 pin 24 (4v) Fig.17 pin 31 (6v)
 0
0
Anuncio
Documentos relacionados
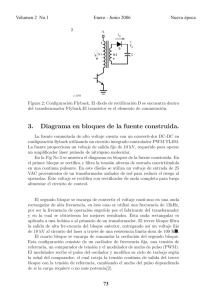






Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados