Planificación de redes de distribución
Anuncio

PONTIFICIA UNIVERSIDAD CATOLICA DE CHILE
ESCUELA DE INGENIERIA
PLANIFICACION DE REDES DE
DISTRIBUCION: APROXIMACION VIA
CLUSTERING, DIAGRAMAS DE
VORONOI Y BUSQUEDA TABU
ALEJANDRO ANDRES NAVARRO ESPINOSA
Tesis para optar al grado de
Magíster en Ciencias de la Ingeniería
Profesor Supervisor:
HUGH RUDNICK VAN DE WYNGARD
Santiago de Chile, diciembre, 2007
2007, Alejandro Andrés Navarro Espinosa
PONTIFICIA UNIVERSIDAD CATOLICA DE CHILE
ESCUELA DE INGENIERIA
PLANIFICACION DE REDES DE
DISTRIBUCION: APROXIMACION VIA
CLUSTERING, DIAGRAMAS DE VORONOI Y
BUSQUEDA TABU
ALEJANDRO ANDRES NAVARRO ESPINOSA
Tesis presentada a la Comisión integrada por los profesores:
HUGH RUDNICK
DAVID WATTS
RODRIGO PALMA
HECTOR JORQUERA
Para completar las exigencias del grado de
Magíster en Ciencias de la Ingeniería
Santiago de Chile, diciembre, 2007
Al que resiste y lucha
ii
AGRADECIMIENTOS
Dar las gracias, ennoblece dicen algunos, mas yo quisiera señalar que las gracias son sólo la
consecuencia a posteriori de un acto muy superior en nobleza y entrega, que convierte al
agradecimiento únicamente en forma y resultado, toda vez que el contenido y causa de las
gracias, es que alguien quiso renunciar a su tiempo y a sus recursos, para entregárselos a
otro, desinteresadamente y sin presión alguna, son ellos y su voluntad, los que han hecho
posible este trabajo. Ejemplo de ello es Chilectra, que proporcionó datos referenciales sobre
su zona de concesión, lo cual constituyó un aporte importante e imprescindible en el
correcto desarrollo de este desafío.
En suma, las siguientes líneas teóricas y técnicas presentan algo más que un problema
complejo, algo más que una investigación, lo que hay es una construcción colectiva de
entrega y ayuda. Agradezco entonces, en estas líneas que habrán de perdurar tanto como la
infinitud de mis agradecimientos, a mi familia, por enseñarme a soñar, a mi colegio, el
Colegio San Viator, por mostrarme la posibilidad de los sueños, a la Fundación Juan Pablo
II, por hacer posible el sueño de muchos, a mis amigos y a la oficina 303, por compartir
nuestros sueños y a veces la ausencia de ellos, y finalmente a Hugh Rudnick, el profesor,
sin el cual despertar hubiese sido un hecho.
iii
INDICE GENERAL
Pág.
DEDICATORIA .......................................................................................................... ii
AGRADECIMIENTOS .............................................................................................. iii
INDICE DE TABLAS ............................................................................................... vii
INDICE DE FIGURAS............................................................................................... ix
RESUMEN................................................................................................................. xii
ABSTRACT.............................................................................................................. xiii
1.
INTRODUCCION.............................................................................................. 1
1.1 Planificación de Sistemas de Distribución de Energía Eléctrica ............... 1
1.2 Planteamiento del Problema....................................................................... 2
1.3 Objetivo...................................................................................................... 4
1.4 Estructura de la Tesis ................................................................................. 4
2.
ESTADO DEL ARTE Y EVOLUCION ............................................................ 7
2.1 Programación Matemática ......................................................................... 7
2.1.1 Planificación de subestaciones ........................................................ 8
2.1.2 Planificación de redes ...................................................................... 9
2.1.3 Planificación conjunta de subestaciones y redes ........................... 10
2.2 Técnicas Meta-heurísticas........................................................................ 12
2.2.1 Planificación con sistemas expertos .............................................. 13
2.2.2 Planificación con intercambio de ramas ........................................ 13
2.2.3 Planificación con temple simulado (Simulated Annealing)........... 15
2.2.4 Planificación con búsqueda tabú (Tabu Search) ........................... 15
2.2.5 Planificación con colonias de hormigas (Ant Colony System)....... 16
2.2.6 Planificación con algoritmos evolutivos........................................ 17
3.
METODOLOGIA DESARROLLADA ........................................................... 20
3.1 Antecedentes Generales ........................................................................... 20
3.2 Breve Explicación de la Metodología Desarrollada................................. 24
3.3 ¿Cómo abordar el problema? ................................................................... 24
4.
PROCESO DE MICRO-OPTIMIZACION...................................................... 31
4.1 Descripción General................................................................................. 31
4.2 Análisis de Cluster ................................................................................... 32
4.3 Metodología de Micro-Optimización....................................................... 36
4.3.1 Etapa previa: determinación de la red vial .................................... 40
4.3.2 Ubicación y asignación de los transformadores ............................ 47
4.3.3 Trazado de red ............................................................................... 49
4.3.4 Selección óptima de conductores................................................... 56
4.3.5 Cálculo de pérdidas de energía ...................................................... 62
4.3.6 Iteraciones y resultados.................................................................. 67
5.
PROCESO DE MACRO-OPTIMIZACION .................................................... 76
5.1 Macro-Optimización Vía Diagramas de Voronoi .................................... 76
5.1.1 Diagramas de Voronoi ................................................................... 77
5.1.2 Procedimiento de optimización vía Voronoi ................................. 79
5.2 Macro-Optimización Vía Búsqueda Tabú ............................................... 91
5.2.1 Triangulación de Delaunay............................................................ 92
5.2.2 Resolución mediante vecindarios .................................................. 96
5.2.3 Resolución mediante búsqueda tabú............................................ 101
5.3 Macro-Optimización: Unión Diagramas de Voronoi y Búsqueda Tabú 107
6.
PLANIFICACION OPTIMA DEL GRAN SANTIAGO............................... 109
6.1 Aplicación del Proceso de Micro-Optimización .................................... 109
6.2 Aplicación del Proceso de Macro-Optimización ................................... 112
6.2.1 Metodología basada en diagrama de Voronoi ............................. 115
6.2.2 Metodología simplificada basada en diagrama de Voronoi......... 117
6.2.3 Metodología basada en vecindarios............................................. 119
6.2.4 Metodología basada en búsqueda tabú y único vecindario ......... 121
6.2.5 Metodología secuencial Voronoi-búsqueda tabú......................... 123
7.
CONCLUSIONES Y TRABAJOS FUTUROS ............................................. 125
7.1 Conclusiones .......................................................................................... 125
7.2 Trabajos Futuros..................................................................................... 130
BIBLIOGRAFIA ..................................................................................................... 133
A N E X O S ............................................................................................................ 141
Anexo A: Complejidad Algorítmica ........................................................................ 142
Anexo B: Descripcion de Meta-heurísticas.............................................................. 145
B.1 Algoritmos Genéticos............................................................................. 147
B.2 Temple Simulado (Simulated Annealing) .............................................. 149
B.3 Colonias de Hormigas ............................................................................ 151
B.4 Búsqueda Tabú....................................................................................... 154
Anexo C: Analisis de Cluster................................................................................... 155
C.1 Métodos Jerárquicos............................................................................... 155
C.2 Métodos de Partición.............................................................................. 156
Anexo D: Costo de Conductores y Transformadores .............................................. 159
Anexo E: Aplicacion Proceso de Micro-Optimización............................................ 161
Anexo F: Costo Mínimo en la Optimzación de una Mini-Zona .............................. 168
Anexo G: Resultados de la Micro-Optimización ..................................................... 170
Anexo H: Resultados Aplicación Gran Santiago ..................................................... 171
INDICE DE TABLAS
Pág.
Tabla 4.1: Evolución de la distorsión en el caso de ejemplo ..................................... 34
Tabla 4.2: Menor distorsión por número de lanzamientos......................................... 47
Tabla 4.3: Resultado selección óptima de conductores ............................................. 62
Tabla 4.4: Variación del costo total con la búsqueda................................................. 70
Tabla 4.5: Efecto del equilibrio de red....................................................................... 72
Tabla 4.6: Confiabilidad del algoritmo ...................................................................... 74
Tabla 5.1: Aplicación diagrama de Voronoi .............................................................. 87
Tabla 5.2: Aplicación diagrama de Voronoi al caso simplificado ............................. 90
Tabla 5.3: Ahorro v/s número de combinaciones con cota en 300 kVA ................... 99
Tabla 5.4: Ahorros por la recombinación de redes .................................................. 101
Tabla 6.1: Micro-optimización del gran Santiago.................................................... 111
Tabla 7.1: Metodologías de macro-optimización sobre Santiago............................ 127
Tabla D.1: Listado de transformadores, capacidades y precios ............................... 159
Tabla D.2: Listado de conductores de cobre desnudo.............................................. 159
Tabla D.3: Listado de conductores de aluminio desnudo ........................................ 160
Tabla D.4: Listado de conductores de aluminio preensamblado ............................. 160
Tabla E.1: Evolución de la función de costo total ................................................... 165
Tabla G.1: Simulaciones equilibrio de red............................................................... 170
vii
Tabla G.2: Evolución de la solución para distintos tamaños de mini-zonas............ 170
Tabla H.1: Micro-optimización del gran Santiago - parte I ..................................... 171
Tabla H.2: Micro-optimización del gran Santiago - parte II.................................... 171
viii
INDICE DE FIGURAS
Pág.
Figura 1.1: Estructura de la tesis .................................................................................. 6
Figura 3.1: Ejemplo 10 nodos .................................................................................... 26
Figura 3.2: Triangulación de Delaunay para el ejemplo de 10 nodos........................ 26
Figura 3.3: Ubicación de los consumos comuna de Macul........................................ 28
Figura 3.4: Diagrama simplificado del algoritmo propuesto ..................................... 30
Figura 4.1: División en mini-zonas............................................................................ 32
Figura 4.2: Ejemplo de aplicación de k-means .......................................................... 35
Figura 4.3: Proceso de micro-optimización para una mini-zona ............................... 37
Figura 4.4: Trazado vial para una mini-zona ............................................................. 41
Figura 4.5: Asignación de los consumos a una calle ................................................. 43
Figura 4.6: Componentes conexas de la red vial........................................................ 46
Figura 4.7: Árbol de mínima expansión..................................................................... 51
Figura 4.8: Trazado de la red de baja tensión ............................................................ 53
Figura 4.9: Equilibrio de red ...................................................................................... 55
Figura 4.10: Efecto de la inclusión del equilibrio en la optimización ....................... 72
Figura 4.11: Costo y tiempo total v/s tamaño de la mini-zona .................................. 75
Figura 5.1: Diagrama de Voronoi para 30 centros..................................................... 78
Figura 5.2: Diagrama de Voronoi para la comuna de Macul..................................... 81
ix
Figura 5.3: Identificación zonas interiores diagrama de Voronoi.............................. 82
Figura 5.4: Identificación y cierre de polígonos con vértices exteriores ................... 83
Figura 5.5: Envolvente convexa de los centros generadores ..................................... 85
Figura 5.6: Diagrama de Voronoi para una solución de la micro-optimización........ 86
Figura 5.7: Diagrama de Voronoi generado por transformadores de 300 kVA......... 88
Figura 5.8: Desventaja de la división en mini-zonas ................................................. 91
Figura 5.9: Ejemplo de la triangulación de Delaunay................................................ 93
Figura 5.10: Aumento de la triangulación producto del aumento en la entrada ........ 95
Figura 5.11: Posibilidad de combinación de redes................................................... 104
Figura 5.12: Configuración de redes producto de la micro-optimización ............... 106
Figura 5.13: Configuración de redes producto de la macro-optimización............... 107
Figura 5.14: Configuración de redes luego de la macro-optimización secuencial .. 108
Figura 6.1: División en mini-zonas del gran Santiago............................................. 110
Figura 6.2: Redes del caso base: micro-optimización.............................................. 114
Figura 6.3: Diagrama de Voronoi aplicado a Santiago ............................................ 117
Figura 6.4: Creación de vecindarios para la recombinación de redes...................... 120
Figura 6.5: Triangulación de Delaunay para Santiago............................................. 122
Figura B.1: Comportamiento de las hormigas ......................................................... 152
Figura E.1: Ubicación de consumos en una mini-zona............................................ 161
Figura E.2: Trazado de calles y asignación de consumos........................................ 162
x
Figura E.3: Ubicación y red inicial .......................................................................... 163
Figura E.4: Ubicación y red del primer mínimo encontrado ................................... 164
Figura E.5: Ubicación y red en la última iteración .................................................. 165
Figura E.6: Evolución de la función objetivo .......................................................... 166
Figura E.7: Equilibrio de la red óptima.................................................................... 166
Figura F.1: Ejemplos de la evolución del costo total ............................................... 169
xi
RESUMEN
La planificación de la distribución eléctrica considerando como input sólo la ubicación y
proyección de la demanda de los consumos, es clave en aquellos mercados en que la
distribución está regulada mediante el esquema de empresa modelo, donde las tarifas son
fijadas de acuerdo a una empresa ficticia óptima, que abastece la misma zona de concesión
de la empresa regulada.
En la presente tesis, se analiza lo referente a la optimización de la red de baja tensión
partiendo desde cero (Greenfield planning), así se propone un procedimiento del tipo
“Dividir y Conquistar”, en que la zona a planificar es dividida en mini-zonas, y a cada una
de ellas se les aplica un procedimiento de optimización, con uso intensivo de clustering,
cuyo acierto es considerar en forma acoplada la ubicación y capacidad de los
transformadores con la red asociada, optimizando también su topología y los conductores
que la componen.
Sin embargo tal división es arbitraria, para perfeccionarlo se realizaron dos familias de
metodologías, una que busca realizar una mejor partición, basada en los diagramas de
Voronoi, en que la ubicación de ciertos transformadores representan los puntos generadores
para los polígonos de Voronoi, logrando mini-zonas irregulares y optimizando cada una de
ellas, y la otra basada en la posibilidad que redes vecinas puedan ser unidas en una misma
red siempre y cuando tal unión genere ahorros, dada la gran cantidad de variables, dicha
construcción es realizada utilizando búsqueda tabú.
La metodología final es una combinación secuencial de ambas, realizando primero una
adecuada fragmentación, para luego optimizar cada mini-zona irregular y finalmente
analizar la posibilidad de unión entre ellas. Obteniendo una metodología que permite
resolver la planificación desde cero para una zona de gran tamaño, la que finalmente es
aplicada sobre la ciudad de Santiago, proceso que entrega como resultado 7.686
transformadores de distribución con una capacidad instalada de 2.625 MVA, con una red de
distribución de baja tensión de 8.935 km.
xii
ABSTRACT
Electrical distribution planning, considering only the location and the projection of
consumption’s demands as inputs, is crucial in those markets in which the distribution is
regulated based on the “model firm” scheme, where prices are set by an optimal fictitious
company that supplies the same concession zone than the regulated company.
In this thesis, the low tension network optimization is analyzed starting from zero
(Greenfield planning), and a “divide and conquer” procedure is utilized. In this method, the
planning zone is divided into mini-zones and an optimization procedure is applied to each
one of them with intensive use of clustering. The relevant achievement is the coupled
solution of the transformer location and sizing, with the associated optimization of the
network topology and its conductors.
Nevertheless such division is arbitrary and two families of methodologies were developed
to improve it. The fist one tries to make a better partitioning process, based on Voronoi’s
diagrams, where the location of particular transformers represents the generating points for
the Voronoi’s polygons, obtaining irregular mini-zones and optimizing each one of them.
The second method takes advantage of the possibility that neighboring networks can be
combined in a single network, as long as such union generates savings. Given the large
number of variables of this structure, it is solved using “Tabu Search”.
The final methodology is a sequential combination of both, making in the first place an
adequate fragmentation, then optimizing each irregular mini-zone, and finally analyzing the
possibility of unions among them. A methodology is finally developed, able to resolve the
Greenfield planning for a large scale zone, finally applying it over the city of Santiago,
giving a solution with 7,686 distribution transformers with an installed capacity of 2,625
MVA, and a low tension distribution network of 8,935 km.
xiii
1
1.
INTRODUCCION
1.1
Planificación de Sistemas de Distribución de Energía Eléctrica
En la cadena de suministro de energía eléctrica es posible distinguir tres grandes
segmentos, encargados cada uno de ellos de una labor clara y definida, el segmento de la
generación es el responsable de transformar la energía proveniente de diversas fuentes,
tales como combustibles, viento, biomasa, agua, fusión nuclear, en energía eléctrica, en
tanto el segmento de la transmisión es el encargado de transportar grandes bloques de
energía desde los centros de generación hacia los centros de consumo. Finalmente, el
segmento de la distribución es el encargado de repartir la energía entre los usuarios finales,
ya sean estos residenciales, comerciales o industriales, por tanto constituye el segmento
más cercano al cliente y por ende está bajo la evaluación constante de los consumidores,
quienes no pueden cambiarse de compañía distribuidora, producto que este segmento
constituye un monopolio natural.
El monopolio natural se produce cuando es más eficiente que exista sólo una empresa
operando en una determinada zona, que varias empresas operando en la misma, ello dado
que su función de costos es subaditiva para el rango de demanda que satisface (Berg y
Tschirhart, 1988), en términos simples, en el negocio de distribución, el costo de satisfacer
a un cliente cuando se suministra a muchos clientes a la vez, es más bajo que cuando se
satisface a un único cliente, fenómeno conocido como economías de densidad. La
existencia de tal monopolio, requiere una regulación por parte del estado, de manera que la
empresa regulada remunere adecuadamente su actividad, y así tenga los incentivos para
seguir operando, y los consumidores reciban un adecuado nivel de servicio.
En Chile, la regulación empleada es por “empresa modelo”, esto significa que la empresa
en cuestión es remunerada no de acuerdo a sus costos reales, sino que de acuerdo al costo
eficiente de una empresa ficticia que cubriría la misma zona de concesión, la cual debe
estar óptimamente diseñada tanto en su gestión como en su política de inversiones, de
manera de estar siempre adaptada a la demanda y cumplir las normativas vigentes de
calidad y seguridad de servicio. Para tal diseño, se considera que la construcción de la
2
empresa modelo se realiza desde cero, esto es, la empresa eficiente considera únicamente la
ubicación y demanda actual y proyectada de los consumos, de manera de no incluir en su
diseño, ninguna de las ineficiencias que podría tener la empresa que está siendo regulada.
Con este tipo de regulación, la empresa real sólo obtendrá rentabilidad si es capaz de
comportarse igual o mejor que la empresa modelo en sus gastos de inversión y operación,
lo que genera incentivos a gestionarse de manera racional y eficiente.
De lo anterior se desprende que la fijación tarifaria comprende dos aristas bien definidas,
por un lado está la optimización de la gestión, vale decir de aquellos costos relacionados
con la administración, facturación y atención al cliente, y por otro, se encuentra la
optimización de las inversiones, localización y tamaño de subestaciones y transformadores,
trazado de la red y tipo de conductores utilizados, es decir la planificación óptima de la red,
lo que constituye un aliciente importante para el desarrollo de la presente tesis.
Se debe señalar que en los sistemas de distribución es posible distinguir dos sistemas
relacionados, uno de media tensión, que es el encargado de comunicar las subestaciones
primarias con los transformadores de distribución y uno de baja tensión que comunica
dichos transformadores con los consumidores finales, siendo por tanto, este último el que
debe abastecer a un gran número de consumos. En el presente trabajo se aborda el problema
exclusivo de la planificación en baja tensión, el cual como se verá en el siguiente apartado,
por sí mismo representa un problema complicado y desafiante.
1.2
Planteamiento del Problema
En este trabajo se busca responder a la planificación óptima de las inversiones, no sólo por
su importancia regulatoria, sino también por la complejidad del problema, el cual, en
términos generales, consiste en abastecer un conjunto de nodos, identificados por su
demanda y por su ubicación espacial, para lo cual se debe determinar el trazado de la red y
el tipo de conductores a utilizar, la ubicación y tipo de transformadores, a fin de minimizar
los costos de inversión
para un horizonte de tiempo determinado, cumpliendo las
restricciones de regulación de tensión y radialidad de la red. De lo cual se desprende el
carácter combinatorio del problema, con presencia de variables enteras, relacionadas con
las decisiones de inversión, como por ejemplo, número entero de transformadores,
3
instalación o no de un transformador en una posición determinada, entre otros, y variables
continuas relacionadas con los flujos eléctricos y regulación de tensión. Resumiendo, la
formulación global del problema sería la siguiente:
min {CInvtransformadores + CInvconductores + C pérdidas }
Sujeto a
•
Abastecer la totalidad de la demanda.
•
Cumplir la regulación de tensión.
•
Existencia de un conjunto discreto de conductores.
•
Existencia de un conjunto discreto de transformadores.
•
Realizar un trazado radial de la red.
•
Respetar las zonas prohibidas de paso.
Se debe señalar que la planificación de la red de baja tensión, junto con ser un problema de
optimización combinatorial, representa un problema del tipo NP-completo1 (Garey y
Jonson, 1979), esto es que el orden de crecimiento del algoritmo para encontrar la solución
no está acotado por un polinomio de orden n, de hecho en la actualidad todos los algoritmos
conocidos para problemas NP-completos utilizan tiempo exponencial con respecto al
tamaño de la entrada. Con lo cual para resolverlo en un tiempo razonable, se requieren
realizar simplificaciones en las restricciones y/o planteamiento del problema, o buscar
métodos alternativos que permitan encontrar una buena solución (Gonen y RamírezRosado,1986, Khator y Leung, 1997). En particular, el problema aquí señalado, ha tratado
de ser resuelto mediante técnicas de programación matemática, con bastantes
simplificaciones que permiten su convergencia (Adams y Laugton, 1974, Ponnavaikko et.
al.,1987, Gonen y Foote, 1981, Youssef y Hackman, 1988, Ramírez-Rosado y Gonen,
1991, Paiva et. al. 2005) y en los últimos años mediante técnicas meta-heurísticas, tales
como intercambio de rama, algoritmos genéticos, algoritmos basados en el comportamiento
de las colonias de hormigas, entre otros (Hsu y Chen, 1990, Nara et al. 1992, Miranda et. al.
1
Para mayor información referirse al anexo A dedicado a la complejidad algorítmica.
4
1994, Goswami 1997, Míguez et. al 2002, Gómez et. al. 2004, Ramírez-Rosado y
Domínguez-Navarro, 2006). No obstante, en ellos no se realiza la optimización de gran
tamaño (más de 500.000 nodos), ni la optimización conjunta de la localización y capacidad
de transformadores con la red asociada, situaciones que en este trabajo serán consideradas.
1.3
Objetivo
Esta investigación busca contribuir al mejoramiento de los instrumentos de regulación con
miras a incentivar la eficiencia económica en el negocio de distribución de energía
eléctrica. A través de una metodología que:
a) Permita obtener la planificación desde cero para la red de distribución de baja
tensión.
b) Considere el análisis acoplado entre localización y capacidad del
transformador con su red de baja tensión asociada.
c) Sea aplicable a una red de gran tamaño.
1.4
Estructura de la Tesis
El trabajo es organizado de la siguiente manera, figura 1.1, en el primer capítulo se entrega
una visión de la importancia tanto regulatoria como técnica de la planificación de los
sistemas de distribución, además de presentar los antecedentes que describen al problema y
a su particular dificultad, mostrando que aspectos del mismo serán considerados en este
trabajo.
En el segundo capítulo se entrega una breve reseña sobre el estado del arte en la materia,
mostrando brevemente la bibliografía revisada y la evolución que ha tenido la forma de
abordar el problema, tanto en la incorporación de variables adicionales como en las nuevas
metodologías planteadas para su solución.
El tercer capítulo muestra los antecedentes de la metodología propuesta, planteando los
desafíos a resolver y los principales supuestos que se asumieron para realizarlos, además de
presentar en términos generales los elementos básicos de dicha metodología.
Posteriormente en el capítulo cuatro y cinco se presentan dos elementos claves del
procedimiento propuesto, que dicen relación con la optimización de zonas pequeñas y la
5
integración de ellas en zonas mayores respectivamente, explicando en detalle cada una de
las partes del algoritmo, y mostrando en cada etapa las decisiones que se tuvieron que
adoptar y los antecedentes en virtud de las cuales se tomaron. Se aplica, cada etapa a un
escenario real, constituido por los consumos de una comuna de la región metropolitana,
Macul, constituida por 20.215 consumos distribuidos en una superficie 12,9 de kilómetros
cuadrados.
En el capítulo seis se aplicarán las mejores prácticas obtenidas de la aplicación del modelo
a la comuna de Macul, en un problema de gran tamaño, dado por la totalidad de la región
Metropolitana, constituida por cerca de 1.300.000 consumos distribuidos en una superficie
de 2.118 kilómetros cuadrados.
Finalmente, en el capítulo siete se presentan las conclusiones del trabajo y los desafíos
futuros relacionados con la planificación de sistemas de distribución.
6
Figura 1.1: Estructura de la tesis
7
2.
ESTADO DEL ARTE Y EVOLUCION
Este capítulo pretende entregar una visión del estado del arte en la planificación de los
sistemas de distribución, mostrando la evolución de los algoritmos empleados, con hincapié
en las restricciones consideradas y aplicabilidad en sistemas reales.
Es necesario reiterar la complejidad del problema a resolver (NP-completo) para el cual
resulta imposible encontrar una solución óptima, que no sea sino a través de la evaluación
completa de todos los posibles resultados, lo cual en un ejercicio de planificación es
imposible, dado el elevado número de variables y combinaciones a considerar, por ejemplo,
consideremos un problema con 100 variables binarias, esto es un espacio de búsqueda de
2100 , es decir 1,26 x 1030 combinaciones posibles. Suponiendo que en evaluar cada
combinación, optimistamente se toma 1 femto-segundo, se requeriría algo así como 40
millones de años en encontrar la solución, por tal razón, los algoritmos que se han
propuesto hasta la fecha, incluyendo el desarrollado en este trabajo, buscan encontrar una
buena solución, lo que no constituye una merma en la calidad, profundidad e importancia
de las investigaciones, sino que simplemente, constituyen una aproximación a la correcta
solución del problema. Es en este sentido, dada la imposibilidad de encontrar el óptimo,
que existen muchos trabajos que intentan dar respuesta al problema, los cuales se pueden
clasificar en dos grandes grupos, aquellos que buscan la solución mediante programación
matemática y aquellos que tratan de hacerlo por medio de vías meta-heurísticas.
2.1
Programación Matemática
La programación matemática también conocida como optimización matemática, busca
resolver problemas de maximización y/o minimización de funciones, sujetas a restricciones,
encontrando siempre la solución óptima, toda vez que ésta solución exista, mediante la
utilización de herramientas matemáticas, entre las que se pueden mencionar branch and
bound, programación dinámica, planos cortantes, etc. Tal como se señala en el comienzo
del trabajo, la complejidad del problema hace que este tipo de algoritmos no pueda resolver
el problema real y por tanto, tenga que abordar relajaciones del mismo, ya sea relajando la
función objetivo, por ejemplo separando el problema de la instalación de transformadores
8
con el problema de trazado y optimización de la red, o relajando las restricciones del
problema, tales como linealización de costos de red, simplificaciones en el flujo de
potencia, no consideración de las pérdidas, por mencionar algunas.
A continuación se presentará una clasificación de algunas de las investigaciones realizadas
en la materia, a fin de vislumbrar la evolución tanto en la metodología como los supuestos
empleados. La agrupación se realizará de acuerdo al tipo de problema que resuelven, ya sea
planificación de subestaciones y/o transformadores de distribución, planificación de redes y
finalmente planificación conjunta de redes y centros de transformación, en cada sección se
seguirá la evolución histórica de los mismos.
2.1.1
Planificación de subestaciones
Este apartado dice relación con la instalación de transformadores y subestaciones, así como
la ampliación de la capacidad de estas últimas. Los primeros algoritmos consideraban un
pequeño número de subestaciones y además requerían como entrada la ubicación de sus
posibles posiciones. Entre los primeros que abordan el problema de aumento de capacidad
de subestaciones está Masud (1974), quien además de determinar la ampliación, calcula el
momento en que se debe realizar, con un modelo compuesto de dos etapas, en la primera se
realiza la selección de la capacidad a aumentar, mediante programación entera y en la
segunda mediante programación lineal se determinan los consumos asociados a cada
subestación. Otros pioneros son Crawford y Holt (1975), quienes dado un conjunto de
ubicaciones para las subestaciones determinan sus respectivas capacidades y áreas de
servicio, mediante el uso del algoritmo de Dijkstra y del algoritmo de Ford y Fulkerson.
Posteriormente Thompson y Wall (1981) incluyen a las posiciones existentes, las posibles
posiciones de nuevas subestaciones como dato de entrada, incorporando una metodología
distinta a la programación lineal, mediante el uso de programación entera, utilizando el
algoritmo de “Branch and Bound”. Finalmente cabe destacar los trabajos de Willis et al
(1985) y Willis et al (1987), en que la función a minimizar esta dada por los costos de
inversión en las subestaciones más los costos de inversión y pérdidas de una red
simplificada, que no considera las restricciones de capacidad de los conductores, ni las
caídas de tensión y que supone que los costos de cada tramo de red son proporcionales al
9
flujo que circula por ellos y a la longitud de los mismos. El procedimiento de solución
emplea programación dinámica y “Branch and Bound”. En Willis et al (1987), se mejora
este algoritmo incorporando la consideración de la carga anual de los consumos y ubica las
subestaciones de manera que satisfaga la demanda con el mínimo de capacidad instalada.
En los años posteriores la atención de los investigadores se centra en la planificación
conjunta de subestaciones y redes, no obstante el problema de planificación de
subestaciones desacoplado de la red, nuevamente vuelve a ser abordado en Temraz y
Salama (2002), donde se determina el área de influencia y la función objetivo es
caracterizada por una función no lineal sin discontinuidades que se soluciona básicamente
siguiendo una metodología de descenso.
De lo anterior se desprende que en lo que respecta a las redes de distribución planificadas
con programación matemática, las investigaciones apuntan al segmento de MT, compuesto
por las subestaciones y alimentadores, sin considerar en el proceso la instalación de los
transformadores y su red BT, situación que recién es abordada en un primer intento por
Bujak (1988), realizando la elección de la ubicación de los transformadores de entre un
conjunto de posiciones candidatas, dato de entrada difícil de conseguir en la práctica,
usando para la resolución del problema como base la técnica de “Branch and Bound”
apoyada por métodos heurísticos auxiliares. Otro intento por resolver la ubicación de los
transformadores en forma independiente de la red se presenta en Moreno et al. (2006),
donde mediante un algoritmo de cluster modificado se asocian los consumos a un
determinado transformador, obteniéndose como resultado la ubicación y capacidad de los
transformadores de distribución, pero sin entregar información acerca de la factibilidad real
de la asociación, y sin conseguir, además, el trazado de la red de baja tensión.
2.1.2
Planificación de redes
Esta sección aborda la selección óptima de conductores y el trazado de la red en forma
independiente de la ubicación de las subestaciones y transformadores. La primera
investigación al respecto, fue realizada por Adams y Laughton (1974), en que dada una
ubicación y capacidad fija de las subestaciones, se escoge la ubicación y tipo de conductor
de las líneas, minimizando el costo de los conductores a través de programación entera –
10
mixta, considerando caídas de tensión y capacidad de conductores. Siguiendo los mismos
supuestos, Wall et al (1979), encuentra el trazado y capacidad de las líneas, usando el
algoritmo de transporte y aproximando la función de costo de los conductores a una función
lineal proporcional a su capacidad térmica. Posteriormente, en 1988, Tram y Wall,
trabajaron en la selección óptima de conductores, considerando la topología de la red como
dato de entrada, lo que implica tomar un alimentador compuesto de n tramos, y para cada
uno de ellos elegir el mejor conductor, considerando como restricción la caída de tensión y
la capacidad de transporte de los conductores. La función a minimizar corresponde a la
suma del costo de inversión más el costo de las pérdidas de todos los tramos del
alimentador, mediante un algoritmo iterativo de búsqueda local. Finalmente cabe
mencionar el trabajo de Mandal y Pahwda (2002) el cual realiza la selección óptima de
conductores basado en el menor valor presente, considerando tanto los costos de inversión
y pérdidas de cada conductor analizado, presentando dos metodologías para la elección de
la mejor alternativa, basadas en la capacidad térmica y económica de cada conductor.
2.1.3
Planificación conjunta de subestaciones y redes
Los trabajos de esta sección buscan resolver tanto la instalación de las subestaciones y/o
transformadores con la red asociada a ellos. Los primeros en abordar esta temática fueron
Hindi y Brameller (1977), a través de un modelo de transporte con restricción de capacidad
y un algoritmo de “Branch and Bound”, en el que se minimizan los costos fijos y variables
de las líneas y subestaciones, una vez que se tiene una solución factible se revisa el
cumplimiento de la restricción de radialidad, si no la satisface se hacen las modificaciones
para que sí lo sea. Resolviendo esta misma función objetivo, Gönen y Foote (1981) la
aproximan a una función lineal por tramos, y para la ubicación de las nuevas subestaciones
consideran como dato de entrada las ubicaciones posibles, su acierto está en considerar la
capacidad discreta de subestaciones y conductores, utilizando programación entera mixta,
dada la gran cantidad de variables necesarias sólo se puede aplicar a sistemas pequeños, de
hecho el modelo es probado sobre un ejemplo de tres posibles ubicaciones de subestaciones
que deben satisfacer en total a doce centros de carga (transformadores de distribución). En
un trabajo posterior Gönen (Gönen y Ramírez-Rosado, 1986), propone un modelo entero
11
mixto, que resuelve simultáneamente el problema de subestaciones y alimentadores, pero
esta vez, indicando el tiempo en que se debe realizar una determinada inversión, modelo
multi-etapa, y considerando las restricciones de regulación de tensión y topología radial de
la red. No obstante, nuevamente el modelo propuesto es sólo aplicable a redes de tamaño
reducido, en este caso el modelo es probado en una red con veinte consumos (centros de
consumo) y con cuatro posibles ubicaciones para subestaciones.
Cabe destacar que no todos los trabajos realizan la linealización de la función objetivo, así
Youssef et al. (1988) considera los costos no lineales, además, como simplificación utiliza
sólo variables continuas, de modo de resolverlo a través del método de Lagrange y así
abordar problemas de dimensiones mayores, siendo probado en un sistema con 3
subestaciones existentes, una subestación futura posible, 27 nodos de consumo y 56 nodos
de trasbordo, para un horizonte de 20 años. También en Ponnavaikko et al. (1987) se
considera la no linealidad de costos, nuevamente se considera continuidad de las variables
en el proceso de optimización, pero en este caso, dentro del proceso son aproximadas a
valores enteros, aplicado a un ejemplo con 10 nodos y 2 posibles ubicaciones para las
subestaciones.
El trabajo de Ramírez-Rosado y Gönen (1991) aborda la característica dinámica del
problema, es decir, no sólo obtiene las capacidades y ubicaciones de subestaciones (dado
un conjunto de ubicaciones posibles) y alimentadores, sino que indica el tiempo en que se
deben llevar a cabo las inversiones, realizando un modelo pseudo-dinámico que es resuelto
en dos fases, aplicando en la primera programación lineal y luego mejorando la solución
mediante “Branch and Bound”. El método es aplicado a la expansión de un sistema real, el
cual, no obstante es de baja dimensión, con no más de cuarenta nodos de consumo, y
considerando la ubicación de dos subestaciones, una existente y otra posible. Siguiendo con
la consideración dinámica del problema, Sanhueza y Rudnick (1995) minimizan el valor
presente de la inversión más operación y pérdidas de un sistema de distribución, mediante
el algoritmo de descomposición de Benders, no obstante la gran cantidad de variables, hace
que su aplicación sea para redes pequeñas, inferiores a 20 nodos.
En Vaziri et al. (2001) el modelo propuesto conserva la estructura dinámica, pero se incluye
esta vez la restricción de presupuesto de la empresa distribuidora, las restricciones técnicas
12
de subestaciones y alimentadores son incorporadas al modelo y no se realiza una revisión
ex - post de ellas, la función objetivo se modela de forma de plantear un problema de
programación entera mixta, el modelo de ejemplo sólo considera 5 centros de demanda y la
ubicación de una subestación existente y de otra posible.
Es importante señalar que existen trabajos que apuntan a la naturaleza probabilística del
problema, en este campo destaca el trabajo de Singh et al (2005), que incluye la
incertidumbre inherente a la proyección de la demanda, resuelve la expansión de un sistema
de distribución mediante Dantzig-Wolfe en que cada subproblema corresponde a un
escenario de demanda, la naturaleza estocástica del modelo genera un gran número de
variables (cercanas a 250.000) lo que vuelve a la metodología inaplicable en un caso real.
Finalmente se encuentra el trabajo de Paiva et. al (2005) que aborda la planificación
dinámica conjunta de la red de media tensión y de baja tensión de los sistemas de
distribución mediante programación lineal entera mixta, considerando una red de baja
tensión detallada, respetando los límites máximos de conductores, subestaciones y
transformadores, y cumpliendo una cierta regulación de tensión, no obstante, la aplicación
real del modelo es infactible, dado que su ejecución en un sistema de 38 nodos de media
tensión y 37 nodos en baja tensión tarda 29.305 segundos ( aproximadamente 8,15 horas).
2.2
Técnicas Meta-heurísticas
Dada la complejidad y dimensionalidad del problema a resolver, los algoritmos basados en
programación matemática no son capaces de considerar todas las variables y restricciones
del problema real, y sólo pueden ser utilizados para solucionar aplicaciones en sistemas
pequeños, lo que ha llevado a los investigadores en el último tiempo a buscar nuevas
prácticas que permitan tomar en consideración el tamaño real del problema a resolver y sus
principales restricciones, de manera de obtener buenas soluciones factibles en tiempo
razonable, pero sin garantizar la obtención del óptimo. Tal tendencia no es prohibitiva de
los sistemas de distribución, sino que representa la manera a través de la cual se están
resolviendo una enormidad de problemas complejos en la actualidad. Esta forma de
resolver se basa en meta-heurísticas, de acuerdo a Glover et al. (2003):
13
“Las meta-heurísticas son métodos que integran de diversas maneras, procedimientos de
mejora local y estrategias de alto nivel para crear un proceso capaz de escapar de óptimos
locales y realizar una búsqueda robusta del espacio de búsqueda. En su evolución, estos
métodos han incorporado diferentes estrategias para evitar la convergencia a óptimos
locales, especialmente en espacios de búsqueda complejos.”
Estas técnicas toman conceptos desde la inteligencia artificial, la genética, la física, la
biología, entre las más utilizadas se cuentan los algoritmos evolutivos, los algoritmos
basados en colonias de hormiga, el intercambio de ramas, la búsqueda tabú y el temple
simulado2.
2.2.1
Planificación con sistemas expertos
Los primeros que usan este tipo de técnicas son Hsu y Chen (1990), quienes desarrollaron
un modelo basado en reglas que interactúan con el usuario, a través de un algoritmo
iterativo en que se ubican las subestaciones con el fin de minimizar las pérdidas en los
alimentadores, para posteriormente asignar a cada subestación el consumo más cercano. Se
debe señalar que no considera el trazado de la red, sino que únicamente la distancia entre el
punto de consumo y la subestación, el modelo es aplicado a un caso de dos posibles
subestaciones y 23 nodos de consumo.
En la literatura es posible notar que los sistemas expertos no resuelven el problema en
forma independiente, sino que necesitan de la interacción con el planificador, este es el caso
de Hsu y Chen (1990), Brauner y Zobel (1994) y Lo y Nashid (1996), por lo cual este tipo
de heurística ha sido paulatinamente abandonada por los investigadores, quienes sólo la han
seguido utilizando en combinación con otros meta-heurísticos.
2.2.2
Planificación con intercambio de ramas
El estudio pionero que introdujo esta metodología fue de Aoki et al (1990), cuyo objetivo
exclusivo era trazar la red óptima, para ello se parte de una solución inicial radial, luego se
incorpora una nueva rama que genera un bucle, y luego se saca una rama para eliminar
dicho bucle. La decisión de la rama a incorporar y de la rama a eliminar está sujeta a las
restricciones de capacidad en los conductores y caídas de tensión en los nodos, el proceso
2
Para mayor detalle ver Anexo C referente a diversas metodologías meta-heurísticas.
14
se repite iterativamente hasta que no se mejora la solución. Una modificación a este estudio
fue propuesta en Nara et al. (1992), donde la técnica intercambio de ramas (branch
exchange) es utilizada en etapas sucesivas, primero se realiza una iteración completa para
tener una solución inicial (primera etapa), luego se permite la adición y sustracción de una
rama, aunque empeore la solución, y continúa el proceso (segunda etapa), si el árbol
resultante es mejor que el árbol inicial se reemplaza, el número de veces en que se realiza
este proceso debe ser indicado por el planificador, es importante destacar que con esta
técnica los tiempos de ejecución comienzan a ser razonables, así trazar la red para un
sistema de 59 nodos tarda aproximadamente un minuto.
En 1997 esta técnica nuevamente es utilizada para el trazado de la red, Goswami (1997),
pero esta vez no sólo aplicada a un único árbol de expansión (una única subestación como
nodo generador del árbol), sino que a un sistema con más de una subestación, para lo cual
se propone partir del árbol de mínima expansión asociado a cada subestación, para luego
intercambiar ramas al interior de una misma red (intercambio intra-zona) e intercambiar
ramas entre redes diferentes (intercambio inter-zonas). Peco (2001) también realiza el
intercambio intra e inter zona, toma la ubicación de subestaciones, transformadores y
consumos como datos de entrada al modelo, respeta los límites de transporte de los
conductores, la regulación de tensión y las restricciones geográficas de la zona en análisis;
se debe destacar que realiza la optimización completa del sistema de distribución,
analizando mediante técnicas de auto-aprendizaje la confiabilidad de la red, siendo
aplicable a una red de gran tamaño; de hecho en el trazado de una red de media tensión que
conecta 75 subestaciones con 6.740 transformadores se demora tan sólo 23 minutos.
En la línea de lograr la aplicabilidad de la metodología a sistemas reales y obtener buenos
resultados, Míguez et al. (2002) propone una mejora consistente en realizar en una primera
fase el trazado de la red por medio de intercambio de ramas, y en una segunda fase incluir
nodos de trasbordo que mejoren la solución (nodos de Steiner) , ello dado que la distancia
no es la única variante relevante en el trazado de la red sino que también lo son los flujos
que transportan los conductores, y con la presencia de estos nodos auxiliares es posible
considerar tal situación, el método propuesto tarda cuatro segundos en trazar la red asociada
a 387 cargas y 9 transformadores.
15
En términos generales, de la literatura revisada, se desprende que la metodología de
intercambio de ramas permite abarcar problemas reales de sistemas de distribución, no
obstante, sólo aborda la problemática referida al trazado de la red, sin realizar la ubicación
de las subestaciones y/o transformadores, por lo que constituye una herramienta que por sí
sola no resuelve el problema de planificación de una red de distribución.
2.2.3
Planificación con temple simulado (Simulated Annealing)
Esta metodología ha sido poco empleada en el problema de planificación de sistemas de
distribución, principalmente se ha usado en problemas relacionados, tales como la
reconfiguración de redes (Chang y Kuo, 1994) y la ampliación de redes por el efecto de la
generación distribuida (Ponce de Leao y Matos, 1994). Su poco uso es producto de la gran
sensibilidad que presenta frente a los parámetros de control, una mala sintonización implica
necesariamente malos resultados, por lo que requiere un gran esfuerzo en la correcta
determinación de ellos, situación que ha motivado el abandono paulatino de esta técnica
como solución a problemas de optimización combinatorial, producto de la existencia de
metodologías alternativas menos sensibles a los parámetros de control.
2.2.4
Planificación con búsqueda tabú (Tabu Search)
La búsqueda tabú ha sido utilizada ampliamente en la resolución de problemas complicados
asociados a la optimización combinatorial, y la planificación de los sistemas de distribución
no ha sido la excepción. Uno de los primeros estudios en esta área fue Nara et al. (1998), en
el que se estudia la expansión del sistema, considerando la incorporación de nuevos
alimentadores y la localización de alimentadores de reserva que aumentan la confiabilidad
de la red.
Sin embargo, los principales aportes con esta técnica fueron desarrollados por RamírezRosado y Domínguez-Navarro (2004 y 2006). En Ramírez-Rosado y Domínguez-Navarro
(2004) se utiliza esta técnica abordando la característica no determinística del problema, a
través de la incorporación de lógica difusa en la definición de la demanda. El modelo es
mono-etapa, la función a minimizar es multi-objetivo y considera la minimización de los
costos de inversión, del valor esperado de la energía no suministrada y del riesgo,
16
entendiendo el riesgo como la posibilidad de sobrepasar la capacidad de los alimentadores
y de no cumplir con la regulación de tensión. Como se trata de una optimización multiobjetivo, el resultado es un conjunto de soluciones en equilibrio paretiano, obtenidas a
través de búsqueda tabú, por lo tanto, la alternativa final debe ser escogida de entre ellas, en
este caso se propone el criterio de Max-mín para su obtención. El modelo es de expansión,
por lo que recibe la ubicación de las subestaciones y alimentadores existentes y de las
posibles ubicaciones de las nuevas subestaciones y alimentadores, se aplica a una caso real
de tamaño medio dado por 182 consumos, una subestación existente y dos posibles
subestaciones, es importante señalar que también realiza la ubicación de alimentadores de
reserva. Los mismos autores en un estudio posterior, Ramírez-Rosado y DomínguezNavarro (2006), resuelven el mismo problema, pero esta vez incorporando una
modificación a la búsqueda tabú denominada NMTS (siglas de su nombre en inglés New
Multiobjective Tabu Search), en donde su principal característica es intensificar la
búsqueda de la solución en las tres funciones objetivos del modelo de optimización.
En suma esta técnica ha mostrado ser eficiente en la solución de problemas de
planificación, dada su posibilidad de evitar quedar atrapada en óptimos locales, lo que la
convierte en una herramienta atractiva en la resolución de problemas combinatoriales
complejos.
2.2.5
Planificación con colonias de hormigas (Ant Colony System)
Esta es una metodología que no ha sido muy aplicada en problemas de distribución, no por
cuanto sea una mala herramienta sino por que constituye una meta-heurística introducida
recién en el año 1996 (Dorigo, 1996) y por tanto aún no ha sido completamente
desarrollada. En relación a la planificación de sistemas de distribución destaca el trabajo de
Gómez et. Al. (2004), en el que se realiza una planificación en una única etapa, se
considera como dato de entrada las posibles ubicaciones para las nuevas subestaciones y la
ubicación de subestaciones y centros de transformación existentes, respeta la capacidad de
los conductores y subestaciones, la topología radial de la red, y una determinada regulación
de tensión. El modelo es aplicado a un área urbana con 201 centros de transformación
17
abastecidos desde una única subestación, demorando en su ejecución, entre 26 minutos y 93
minutos dependiendo de la calidad de la solución buscada.
Esta metodología presenta la virtud de tener en cada iteración una mejor solución que en la
iteración anterior y por ende fijando el número de iteraciones o de colonias de hormiga se
pueden obtener buenos resultados en un tiempo razonable, sin embargo, dicho tiempo es
adecuado en sistemas pequeños puesto que con miles de nodos sería inviable, dado que
cada colonia realiza un proceso completo de construcción de red, y por tanto muchas
colonias implica muchos procesos a completar.
2.2.6
Planificación con algoritmos evolutivos
El primer trabajo que emplea los algoritmos genéticos o evolutivos para su resolución fue
Miranda et al. (1994), en el cual, la función no sólo incluye los costos de instalación y
expansión tanto de conductores como subestaciones y/o transformadores, sino que además
considera un indicador de calidad de tensión y un índice de confiabilidad de la red, a los
cuales se les asigna un costo. Como dato de entrada recibe la ubicación de las nuevas
posibles subestaciones, y realiza una optimización multi-etapa, por tanto indica el momento
en que se deben llevar a cabo las inversiones; el método es probado en un sistema 50 nodos,
con dos subestaciones existentes y con dos posibles nuevas ubicaciones. También en el
marco de una optimización multi-etapa, Ramírez-Rosado y Bernal-Agustín (1998)
resuelven un modelo de planificación de expansión, que entrega la ubicación y tamaño
tanto de subestaciones como de alimentadores, el modelo incluye los costos no lineales
asociados a la operación (costos de pérdidas) sin linealizarlos, como dato de entrada recibe
las posibles rutas de los alimentadores y posibles ubicaciones, en la resolución de un caso
real resuelve la expansión de una red de 417 nodos en 15,25 horas, lo cual ya comienza a
ser atractivo desde el punto de vista práctico. En un estudio posterior Ramírez-Rosado y
Bernal-Agustín (2001), incluyen en su modelo la planificación multi – objetivo,
minimizando los costos de inversión y la energía no suministrada, es decir la confiabilidad
no es valorizada en cuanto a costo (función objetivo como minimización de una
combinación lineal de costos) sino que es incluida como un objetivo en el problema, y por
tanto se obtiene un conjunto de soluciones (no una única solución como en la optimización
18
mono – objetivo) en equilibrio paretiano. Luego, es función del planificador elegir la
solución final de entre el conjunto de soluciones encontradas. Es necesario mencionar que
la disminución de la energía no suministrada se logra con la incorporación de alimentadores
auxiliares que se encuentran en estado normalmente abierto. El modelo fue probado en un
sistema de 417 nodos con un horizonte de tres años, donde se obtuvo el conjunto de
soluciones paretianas, sin embargo no se indica su tiempo de ejecución.
Otro trabajo importante de destacar es el realizado por Carvalho et al (2000), en el que se
incorpora la incertidumbre al problema de planificación, incertidumbre que es modelada a
través de un árbol de escenarios posibles. El procedimiento empleado no es el de optimizar
el valor esperado de los distintos escenarios (procedimiento habitual), ya que de esta
manera “lo único que se consigue es una población de soluciones que son muy buenas en
promedio pero que son un desastre en un escenario particular” (Carvalho et al 2000), en su
lugar, propone una metodología en que cada escenario constituye un subproblema, cada
población evoluciona de acuerdo a su propio escenario para luego evolucionar tomando en
consideración su costo esperado en los demás escenarios. En Ferreira et al (2001), estudio
del que también participa Carvalho, se realiza la expansión del sistema de distribución y su
reconfiguración, lo interesante de este modelo es que es aplicado a un sistema de media
tensión compuesto por 54 subestaciones y 8.964 nodos, tardando sólo 28 minutos.
Finalmente se debe mencionar el trabajo de Díaz-Dorado (2002, 2003) por su aplicabilidad
a un sistema real, si bien únicamente realiza el trazado de la red, recibiendo como dato de
entrada la ubicación de subestaciones, transformadores y consumos y no considera la
dimensión temporal del problema, sí incluye en el análisis la topología vial, esto es, que el
trazado de la red se realiza sólo sobre las calles de la zona en estudio. También se debe
señalar que en este trabajo se aborda el problema de los alimentadores de respaldo para
darle más seguridad a la red de distribución de media tensión. Esta metodología fue
aplicada a un caso real con 3 subestaciones, 242 transformadores y 1.852 nodos tardando
60.000 iteraciones en encontrar la solución final.
La utilización de esta meta-heurística ha sido abordada ampliamente por los investigadores
en planificación de sistemas de distribución y como gran acierto se encuentra su aplicación
a redes de tamaño real.
19
En resumen, y tomando en consideración los estudios antes señalados, es posible afirmar
que las metodologías basadas en programación matemática han sido abandonadas por los
investigadores para abordar el tema de la planificación de sistemas de distribución, ello
dada su imposibilidad de resolver problemas cercanos a la realidad, y en contrapartida, han
seguido el camino del desarrollo y aplicación de meta-heurísticas, que si bien no permiten
encontrar el óptimo, representan una muy buena aproximación a la solución de problemas
reales.
20
3.
METODOLOGIA DESARROLLADA
3.1
Antecedentes Generales
Considerando la revisión bibliográfica realizada, es posible inferir que las técnicas de
programación matemáticas no son adecuadas para resolver problemas de planificación de
sistemas de distribución, ello debido a que sólo son capaces de resolver ejercicios de
tamaño reducido (Gonen y Foote, 1981, Ponnavaikko et al, 1987, Gönen y RamírezRosado, 1986, Vaziri et al, 2001), y en caso de abordar problemas de mayor envergadura,
los tiempos de ejecución crecen exponencialmente con el tamaño de la entrada (Paiva et. al.
2005). Por lo cual la planificación de sistemas de distribución, a partir de la década de los
90 ha sido ampliamente explorada a través de técnicas meta-heurísticas, que permiten
responder problemas de mayor dimensionalidad (Peco, 2001, Ferreira et al, 2001, DíazDorado 2002, Díaz-Dorado 2003), con la desventaja de no ser capaces de encontrar el
óptimo de la función objetivo que caracteriza al problema en cuestión. No obstante, se debe
tener siempre presente que en la mayoría de las ocasiones en ingeniería se buscan buenas
soluciones, dado que las óptimas son imposibles de conseguir.
De la revisión también es posible constatar, que si bien los investigadores que utilizan
técnicas meta-heurísticas abordan problemas de mayor dimensionalidad en comparación
con los que utilizan técnicas de programación matemática, en la mayoría de los casos tales
aumentos de tamaño no representan, en absoluto, problemas reales y en el mejor de los
casos resuelven problemas reales de dificultad media, en zonas donde no existe gran
cantidad de consumos (Ramírez-Rosado y Bernal-Agustín, 1998, Míguez et al, 2002,
Ramírez-Rosado y Domínguez-Navarro, 2004). Excepciones a esto, lo constituyen los
estudios de Díaz-Dorado (1999) y de Peco (2001) en los que realmente se resuelven
problemas de gran tamaño, aplicables a provincias completas de España, sin embargo, el
modelo de Peco, que muestra una optimización completa tanto del sistema de media tensión
como del de baja tensión, no realiza la ubicación de los transformadores, sino que los
considera como datos de entrada al problema, por lo que la resolución en términos
generales hace referencia a la elección de la ruta óptima en baja tensión y a la ruta y
21
respaldo correspondientes en media tensión, desconociendo la relación existente entre
ubicación del transformador y la red asociada al mismo, siendo su principal acierto la
incorporación del trazado vial como restricción de la optimización, de forma tal que las
redes asociadas a un determinado transformador no crucen por zonas prohibidas, sino que
respeten el callejero. Por otro lado, el modelo de Díaz-Dorado (1999), incorpora en el
algoritmo la ubicación óptima de transformadores, y si bien realiza la optimización
conjunta de la red de baja tensión con la de media tensión, la relación que se establece entre
ambas es a través de simplificaciones, así al planificar la red de baja tensión, se asume que
la red de media tensión está dada por el árbol de mínima expansión, lo que constituye una
simplificación relevante, pero que permite una aproximación a la resolución del problema.
Su mayor falencia es que no manifiesta explícitamente la posibilidad de considerar la
restricción vial, de hecho en una investigación posterior basada en el estudio en cuestión,
queda de manifiesto la ausencia de la topología vial como restricción a la solución del
problema (Díaz-Dorado, 2003).
En el contexto señalado, la presente investigación seguirá en la línea de la optimización de
sistemas reales, pero esta vez considerando la interacción que se produce entre los centros
de transformación y la red, respetando la topología vial de la zona a optimizar. Se debe
reiterar el interés regulatorio de contar con un modelo de planificación que pueda optimizar
el sistema de distribución únicamente considerando la ubicación y el tamaño de las cargas,
es decir que sea capaz de trazar la red, calcular las capacidades óptimas de los conductores
asociados a ella, obtener la ubicación y capacidad de subestaciones y transformadores. A
este tipo de planificación se le conoce como “greenfield planning”, caracterizándose por
una gran complejidad, dada por el enorme número de variables de decisión y por la gran
cantidad de consumos a suministrar (tamaño elevado de la entrada), siendo este
precisamente el problema que busca resolver esta investigación. Sin embargo, considerando
la enormidad de variables involucradas en el problema, se abordará sólo lo referente a la
planificación de redes de distribución eléctrica en su componente de baja tensión, ello
debido a que representa un problema en sí mismo, que no ha sido lo suficientemente
abordado. De la revisión bibliográfica muy pocos se refieren al tema de la planificación de
baja tensión, ya sea en forma independiente o de manera conjunta (Peco 2001, Paiva et. al.
22
2005), lo que lo convierte en un tema de gran interés a resolver y que además podría ser
utilizado en trabajos futuros, como una componente de un modelo que aborde íntegramente
la planificación tanto en media como en baja tensión.
También al igual que en los dos estudios citados, dada la gran cantidad de variables a
abordar, se considera un modelo de solución estático, es decir, la planificación del sistema
tomará en cuenta sólo una etapa de análisis, en la cual, se utilizarán las demandas
pronosticadas para el último año del horizonte de planificación, con lo que el conjunto de
inversiones a realizar no presentará un cronograma de actividades, por tanto no responde a
la pregunta ¿cuándo invertir?, sino que supone que todas las obras necesarias deben ser
construidas en el mismo instante, es decir al inicio del período de planificación.
Con las consideraciones anteriores el modelo a resolver puede representarse mediante la
siguiente formulación matemática (Díaz-Dorado, 1999), siendo la ecuación (3.1) la función
objetivo que incluye los costos fijos y variables de los transformadores y de la red de baja
tensión, la ecuación (3.2) garantiza el equilibrio de flujo en los nodos del sistema, mientras
que las ecuaciones (3.3) y (3.4) limitan la capacidad de los transformadores y conductores,
respectivamente, a sus valores máximos nominales, las ecuaciones (3.7), (3.8) y (3.9)
garantizan que las caídas de tensión no pasen de un valor determinado y finalmente la
ecuación (3.12) fuerza la radialidad de la red3.
∑ ∑ (π
min
ik
gik + ϖ ik yik ) +
i∈Trafos k∈TT ( i )
∑
k ∈TT ( i )
yi + ∑
∑ (x
j∈N k∈TC ( i , j )
0 ≤ yik ≤ π ikVik
0 ≤ xijk ≤ λijkU ijk
jik
ijk
− xijk ) = bik
∀i ∈ N
∀i ∈ N , ∀k ∈ TT (i )
∀(i, j ) ∈ R, ∀k ∈ TC (i, j )
π ik ∈ {0,1} ∀i ∈ N , ∀k ∈ TT (i )
3
∑ ∑ (λ
( i , j )∈R k ∈TC ( i , j )
fijk + cijk xijk )
(3.1)
(3.2)
(3.3)
(3.4)
(3.5)
Garantiza radialidad siempre y cuando no existan nodos de bifurcación, en cuyo caso se deben utilizar
métodos heurísticos que rompan los enmallamientos que se pueden producir, el método más utilizado se
conoce como load splitting, en el cual se determina el nodo de la malla al que llega potencia por dos ramas, en
cuyo caso se divide el nodo y las ramas que salen de él, repartiendo de manera adecuada la carga.
23
λijk ∈ {0,1} ∀(i, j ) ∈ R, ∀k ∈ TC (i, j )
∑
(vi + Dij ) − (v j + D ji ) =
k∈TC ( i , j )
Gijk ( x jik − xijk ) ∀(i, j ) ∈ R
(3.6)
(3.7)
0 ≤ Dij ≤ D(1 − λij ) ∀(i, j ) ∈ R
(3.8)
V min ≤ vi
(3.9)
∑
0≤
∀i ∈ N
π ik ≤ 1 ∀i ∈ N
(3.10)
λijk ≤ 1 ∀(i, j ) ∈ R
(3.11)
k ∈TT ( i )
∑
0≤
k ∈TT ( i )
N−
∑ ∑π
ik
=
k ∈TT ( i ) i∈N
∑ ∑
λijk
∀i ∈ N , ∀(i, j ) ∈ R
(3.12)
k ∈TC ( i , j ) ( i , j )∈R
El detalle de las variables es el siguiente:
•
N
: número de nodos de la red.
•
R
: conjunto de ramas factibles.
•
TT(i) : conjunto de tipos de transformadores posibles de instalar en el nodo i.
•
TC(i) : conjunto de posibles tipos de conductores a instalar en la rama (i,j).
•
λijk
: variable binaria que indica si existe la rama entre los nodos (i,j)
utilizando el conductor tipo k.
•
πik
: variable binaria que indica si existe un transformador del tipo k instalado
en el nodo i.
•
xijk
: variable real que representa el modulo de la potencia que cruza por la rama
(i,j) a través del conductor tipo k.
•
yik
: variable real que indica el modulo de la potencia que inyecta el
transformador tipo k instalado en el nodo i.
•
gik
: costo fijo del transformador tipo k instalado en el nodo i.
•
ωik
: costo por unidad transformada en el transformador tipo k del nodo i.
•
vi
: módulo de la tensión en el nodo i.
24
•
Dij
: variable de holgura4 asociada a las caídas de tensión en el nodo i producto
del flujo que viene desde el nodo j.
•
Gij
: variable de proporcionalidad que relaciona el flujo entre el nodo i y el
nodo j, con la caída de tensión en el nodo i producto del flujo que se mueve
desde j.
3.2
•
D
: máxima variación de caída de tensión permitida.
•
Vmin
: menor modulo de voltaje permitido en el ejercicio de planificación.
Breve Explicación de la Metodología Desarrollada
Para resolver el modelo señalado y en atención a su imposibilidad de solucionarlo vía
programación matemática se presenta una metodología heurística que será explicada paso a
paso, siguiendo su aplicación para el caso de Macul, comuna de Santiago, compuesta de
20.215 consumos, repartidos en una superficie de 12,9 kilómetros cuadrados.
Como ya se ha hecho referencia, encontrar el óptimo para un problema de estas
dimensiones, es imposible de realizar en un tiempo razonable, al menos con las
restricciones computacionales presentes en la actualidad. Por lo cual se propone una metaheurística, cuyo corazón está constituido por tres técnicas principales, por una técnica de
cluster denominada k-means que será importante para la determinación de la ubicación de
los transformadores y las redes asociadas a ellos, por una técnica llamada diagramas de
Voronoi, que permitirá realizar una asignación inteligente de los consumos, y finalmente
por una meta-heurística de optimización denominada búsqueda tabú, mediante la cual, se
podrán mejorar las soluciones encontradas.
3.3
¿Cómo abordar el problema?
Dado un conjunto de nodos, representados por su ubicación en el plano cartesiano, se desea
conocer el número de redes, configuración y diseño, asociada a cada transformador, es
decir en primer término se requiere crear subconjuntos de consumos que sean abastecidos
4
Variables de holgura necesarias debido a que a priori no se conoce cuales son los nodos que se conectarán
para formar la red.
25
por un mismo transformador para luego trazar su red. Por ejemplo, si se tienen diez nodos,
se pueden realizar 1.023 subconjuntos distintos, donde cada subconjunto es abastecido por
un único transformador. Ello de acuerdo a la siguiente expresión:
10 10
10 10 10 10
10!
+
+
+
= 210 − 1 = 1.023
...
= ∑ = ∑
1 2
10 i =1 i i =1 i !(10 − i ) !
Además, si se considera que al interior de cada grupo el transformador puede tomar
cualquiera de las posiciones, entonces se tiene:
10
10
10 10 10 10
10!
1 ⋅ + 2 ⋅ + ... + 10 ⋅ = ∑ i ⋅ = ∑ i ⋅
= 5.120
1
2
10 i =1 i i =1 i !(10 − i ) !
Por lo tanto, para un caso sencillo de 10 nodos, existen 5.120 posibles soluciones a evaluar.
No obstante, se debe señalar que tal número constituye una cota superior para el conjunto
de soluciones factibles, dado que muchos de los subconjuntos, producto de una determinada
configuración de los consumos, no tienen sentido práctico, debido a que están constituidos
por nodos que se encuentran alejados.
26
10
9
8
7
[m]
6
5
4
3
2
1
1
2
3
4
5
[m]
6
7
8
9
10
Figura 3.1: Ejemplo 10 nodos
En la figura anterior se puede apreciar claramente que no todos los subconjuntos son
viables, de hecho sólo aquellas combinaciones que agrupan nodos vecinos son factibles de
analizar. Por lo cual, para conocer en forma aproximada el número de combinaciones
factibles, se procede a limitar las agrupaciones a aquellas que están conectadas por medio
de arcos pertenecientes a la triangulación de Delaunay, de acuerdo a la siguiente figura.
10
9
8
7
[m]
6
5
4
3
2
1
1
2
3
4
5
[m]
6
7
8
9
10
Figura 3.2: Triangulación de Delaunay para el ejemplo de 10 nodos
27
Es decir sólo las agrupaciones, que contengan nodos unidos a través de los arcos señalados
en la figura serán consideradas, con lo que se limitan los subconjuntos a los casos vecinos.
Se debe señalar brevemente, que la triangulación de Delaunay se refiere a aquella, en que
cada circunferencia circunscrita a cada triángulo de la red no contiene ningún vértice
perteneciente a otro triángulo de la red5, identificando como consumos (nodos) vecinos a
quienes se encuentran unidos por una arista de un polígono de la triangulación. Realizando
esto, se obtiene que el número de subconjuntos posibles6 para la configuración utilizada
como ejemplo, es del orden de 4.300 casos, menor a los 5.120 iniciales. Si se quieren
restringir aún más los casos posibles, se pueden evaluar únicamente las combinaciones que
se producen entre cada nodo y sus nodos más cercanos (conectados por una única arista),
con lo que el número de casos factibles es de7 197. Dicha cantidad no constituye un número
elevado de combinaciones, por lo que podría ser resuelto sin inconvenientes por un método
tradicional de programación matemática. No obstante el problema que se busca resolver en
el presente trabajo, tiene una dimensionalidad mayor, de hecho considerando los 20.215
consumos se tendría como cota superior casi infinitas combinaciones (220215-1).
5
La triangulación de Delaunay constituye el dual del diagrama de Voronoi, ambos serán explicado es detalle
en el capítulo 5.
6
Subconjuntos factibles dados por aquellas combinaciones que representan un subgrafo de la triangulación de
Delaunay.
7
La triangulación de Delaunay depende de la distribución espacial de los consumos y por tanto el número de
subconjuntos posibles variará de un caso a otro dependiendo de tal o cual configuración.
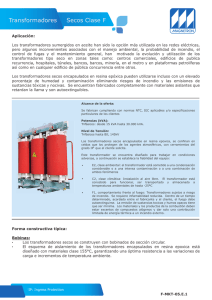
28
12000
11000
10000
9000
[m]
8000
7000
6000
3.6
3.65
3.7
3.75
3.8
3.85
[m]
3.9
3.95
4
4.05
4.1
4
x 10
Figura 3.3: Ubicación de los consumos comuna de Macul
Si se consideran únicamente las combinaciones posibles entre cada nodo y sus vecinos
(calculados a través de la triangulación de Delaunay, y acotados a no más de tres elementos
por grupo), se tienen 242.483 combinaciones posibles, lo que ratifica que el problema en
cuestión no puede ser resuelto a través de técnicas convencionales. Surgiendo
inevitablemente la siguiente pregunta, ¿Cómo abordar el problema?.
La estrategia propuesta para conseguirlo esta basada en la técnica conocida como “Dividir
y Conquistar”, que básicamente consiste en resolver subproblemas del mismo tipo que el
problema principal pero de menores dimensiones, es decir, dividir Macul en zonas de
menor tamaño donde cada una de ellas representa un subproblema, de manera de disminuir
el número de combinaciones al resolver problemas con menos consumos (la dificultad del
problema crece exponencialmente con la entrada), con lo cual la suma de las
combinaciones posibles en cada subproblema es mucho menor que el total de
combinaciones del problema completo, lográndose de esta manera afrontar de forma
razonable el problema en cuestión. Específicamente los pasos fundamentales de esta técnica
son:
29
1. Plantear el problema de manera que pueda ser descompuesto en k problemas distintos,
del mismo tipo que el problema principal, pero de menor tamaño. Por tanto si el tamaño
de la entrada es n, entonces el tamaño de cada subproblema, denotado por nk, debe
cumplir que 0≤ nk ≤ n, este proceso se denomina división.
2. Cada subproblema se debe resolver en forma independiente. Lo interesante de esta parte
del procedimiento es que abre la posibilidad para realizar cada uno de los subproblemas
en forma paralela, utilizando distintos computadores para cada uno de ellos, con lo que
es posible obtener importantes ahorros en los tiempos de ejecución.
3. Finalmente se deben combinar las soluciones obtenidas en el paso dos para así lograr la
solución del problema global.
Por tanto, la forma de solucionar el problema en cuestión es dividir la zona de gran tamaño
a planificar, en zonas regulares de menor tamaño, para después aplicar a cada una de esas
mini-zonas, un proceso de optimización, que se denomina proceso de micro-optimización,
luego para combinar cada una de las soluciones y encontrar los ahorros, producto de ver el
problema en forma global, se realiza un proceso denominado macro-optimización, en
particular se desarrollan dos metodologías base de macro-optimización, una basada en
diagramas de Voronoi y otra basada en la búsqueda tabú, para finalmente mostrar la
combinación de ambas y los ahorros correspondientes que se producen. En los siguientes
capítulos se explicarán en detalle cada una de las alternativas mencionadas, que se ilustran
en el siguiente esquema:
30
Figura 3.4: Diagrama simplificado del algoritmo propuesto
31
4.
PROCESO DE MICRO-OPTIMIZACION
4.1
Descripción General
Tal y como se señaló en el capítulo anterior la división en mini-zonas permite acercarse a la
solución del problema, ya que logra disminuir el número de variables involucradas y el
gran número de combinaciones que se producen entre ellas. Este capítulo se concentra en el
desarrollo de la metodología propuesta para la optimización de cada mini-zona,
manteniendo la misma función objetivo y restricciones del problema completo, esto es,
buscando la ubicación y capacidad de transformadores, la topología de la red asociada a
cada uno de ellos, el tipo de conductor para cada tramo de la red, respetando las
restricciones viales, las caídas de tensión, la radialidad de la red, todo ello en el marco de la
minimización de la inversión en transformadores y conductores más los costos asociados a
las pérdidas.
La metodología desarrollada puede ser aplicada a cualquier mini-zona de tamaño n x m, en
particular, para entender el algoritmo se mostrará la aplicación para mini-zonas de 500
metros x 500 metros. Una vez que el procedimiento completo sea revisado, se realizará el
proceso de micro-optimización para distintos tamaños de mini-zonas, de forma que sea
posible apreciar el efecto de tal elección en el resultado final.
32
12000
11000
10000
[m]
9000
8000
7000
3.6
3.7
3.8
[m]
3.9
4
4.1
4
x 10
Figura 4.1: División en mini-zonas
Para cada una de las zonas señaladas en la figura anterior, se requiere agrupar los consumos
asignando un transformador a cada agrupación, de manera tal que se evite realizar la
enumeración completa de todas las posibles alternativas (subconjuntos), es decir se debe
conseguir una agrupación inteligente de los consumos, la forma propuesta para lograrlo es a
través de un algoritmo de búsqueda local combinado con análisis de cluster. Para
comprender la técnica empleada, se realizará una pequeña reseña referente al análisis de
cluster8 para luego explicar el algoritmo propuesto.
4.2
Análisis de Cluster
El análisis de cluster es una técnica estadística multivariante, cuyo objetivo es dividir un
conjunto de elementos en grupos, de manera que las características de los elementos
pertenecientes a un mismo grupo sean muy similares entre sí, situación denominada
cohesión interna, y las características de elementos pertenecientes a distintos grupos sean
diferentes, situación conocida como aislamiento externo del grupo. Para conocer tal
similitud se hace necesaria la existencia de medidas que indiquen el grado de parecido,
8
Para mayor información refiérase al anexo C
33
medidas de proximidad, o diferencia, medidas de distancia, que existen entre dos elementos
que se quieren agrupar.
En particular, la técnica de cluster que se empleará en el presente trabajo, es el algoritmo de
k-means, que permite clasificar un conjunto de n datos en k subconjuntos, donde la cantidad
de grupos a formar, k, es un dato de entrada del algoritmo. Éste, en términos sencillos está
compuesto por los siguientes pasos:
1. Elección de k datos de los n a agrupar, estos constituyen los k centroides iniciales.
Se calculan las distancias de los datos a cada uno de los centroides. Cada dato es
asignado al centroide más cercano, formándose k grupos.
2. Para cada uno de los grupos se calcula el nuevo centroide como el valor medio de
todos los datos asignados a él.
3. Se repite el proceso 2 y 3 hasta que se satisface un criterio de convergencia
determinado.
La medida de distancia utilizada por el algoritmo corresponde a la distancia euclidiana,
dada por:
d ( x, µ X ) = x − µ X
2
= ( x − µ X )T ⋅ ( x − µ X )T
(4.1)
Donde:
•
d
: distancia euclidiana.
•
x
: vector de posiciones de los datos.
•
µX
: valor medio de los datos (centroide).
El criterio de parada está dado por el mínimo entre un número máximo de iteraciones
permitidas y la variación de la distorsión entre dos iteraciones sucesivas. El número
máximo de iteraciones es un dato de entrada al algoritmo y dependerá de la convergencia
presentada en el problema a resolver. En tanto que la distorsión es la suma de todas las
distancias a su respectivo centroide.
34
k
D(i ) = ∑ ∑ x − µi
2
(4.2)
i =1 x∈Ci
Donde:
•
D(i)
: distorsión al finalizar la iteración i.
•
k
: número de clusters.
•
Ci
: cluster i-ésimo.
De la expresión anterior se desprende que el criterio de parada será D(n) − D(n + 1) ≤ ε
9
A modo de ejemplo en la figura (4.2) se emplea la técnica para crear tres subconjuntos
utilizando como criterio la cercanía entre los nodos, en la iteración 1 se parte con la
ubicación aleatoria de los tres centros, señalados mediante triángulos, a cada uno se le
asignan los nodos más cercanos (identificados en la figura por un mismo color), para luego
mover tales centros al centroide del subconjunto, dicho proceso se repite, en este caso
durante 12 iteraciones, dado que más iteraciones no presentan mejoras a la solución, lo que
se aprecia claramente en la tabla 4.1.
Tabla 4.1: Evolución de la distorsión en el caso de ejemplo
Iteración
Inicial
1
2
3
4
5
6
7
8
9
10
11
12
9
Distorsión
(Km)
5230
4957
4504
3775
3459
3226
2966
2752
2633
2615
2611
2609
2609
Con ε, definido por el planificador, no obstante usualmente está entre 0.5 % y 1%.
35
Se debe notar que entre la iteración 11 y 12 no existe variación de la distorsión, de no
haberse logrado la convergencia el algoritmo se detiene cuando se alcanza un número
máximo de iteraciones, el cual en este trabajo es de 200 iteraciones.
8100
8100
8050
8050
8000
8000
Iteración 1
7950
[m] 7900
[m]
7900
7850
7850
7800
7800
7750
7750
7700
3.805
3.81
3.815
3.82
3.825
3.83
3.835
3.84
3.845
[m]
7700
3.805
3.85
8050
8050
8000
8000
Iteración 5
7850
7800
7750
7750
3.815
3.82
3.825
3.83
3.835
3.84
3.845
[m]
7700
3.805
3.85
8050
8050
8000
8000
Iteración 9
7850
7800
7750
7750
3.815
3.82
3.825
3.83
[m]
3.835
3.84
3.845
3.835
3.84
3.845
7700
3.805
3.85
3.82
3.825
3.83
4
3.835
3.84
3.845
3.85
4
x 10
Iteración Final
3.81
3.815
3.82
3.825
3.83
[m]
4
x 10
3.85
x 10
7900
7800
3.81
3.815
7950
[m]
7850
7700
3.805
3.83
[m]
8100
[m] 7900
3.81
4
x 10
8100
7950
3.825
7900
7800
3.81
3.82
Iteración 7
7950
[m]
7850
7700
3.805
3.815
[m]
8100
[m] 7900
3.81
4
x 10
8100
7950
Iteración 3
7950
.
Figura 4.2: Ejemplo de aplicación de k-means
3.835
3.84
3.845
3.85
4
x 10
36
4.3
Metodología de Micro-Optimización
Del apartado anterior se desprende que k-means permite una elección inteligente de
subconjuntos, de hecho si los datos de entrada están dados por los consumos y los
centroides representan a los transformadores, se puede realizar una buena ubicación de los
mismos, sin necesidad de aumentar los tiempos de ejecución, situación que si se produce
probando todas las combinaciones. Sin embargo, ¿es suficiente sólo con k-means para
realizar la ubicación óptima de transformadores y red asociada?. La respuesta es no, ello
dado que k-means por si mismo no entrega el número de transformadores, sino que sólo
agrupa las cargas en un número elegido a priori de subconjuntos, y no incluye la relación
que existe entre los consumos asignados a un transformador con el mismo, a través de la
red que los conecta, ni menos aún respeta las restricciones geográficas, con lo que
consumos cercanos pero imposibles de conectar son indiferentes para k-means.
En Moreno et al. (2006) se realiza una aproximación a la determinación de un parque
óptimo de transformadores para una zona determinada. Mediante esta técnica de cluster, no
obstante, en tal trabajo se realiza únicamente la ubicación de los transformadores, que son
elegidos previamente a través de una optimización vía programación matemática, con lo
que se disocia la ubicación del transformador de su elección, es decir, existe la posibilidad
que transformadores que son óptimos para una determinada carga puntual, puede que ya no
lo sean cuando la carga a satisfacer está distribuida en el plano, dado que tal asignación no
consideró las restricciones viales, existencia de caminos para trazar la red, ni los costos
asociados a la topología de la misma, situaciones todas que hacen posible dudar de la
bondad de la elección realizada por separado de la ubicación. Es por ello que en el presente
trabajo se busca optimizar la red de baja tensión sin disociar la elección de la capacidad y
ubicación de un transformador con su trazado y por tanto con el costo de su red asociada.
El algoritmo propuesto consiste básicamente en un procedimiento de descenso en donde
para cada mini-zona se comienza con la ubicación de un transformador, después se calcula
el costo de la red asociada, que respeta la topología vial, y el costo del transformador que
satisface la demanda, luego se realiza el mismo procedimiento para el caso de dos
transformadores, así sucesivamente hasta que se encuentra el óptimo. El supuesto que
37
sustenta la metodología es que en la medida que aumenta el número de transformadores en
una mini-zona, disminuye el costo asociado a la red y aumenta el costo de transformación,
situación que hace posible encontrar un mínimo. Al final del presente capítulo se mostrará
la validez real de dicho supuesto.
Figura 4.3: Proceso de micro-optimización para una mini-zona
El diagrama de flujo simplificado del algoritmo propuesto se muestra en la figura (4.3),
antes de explicar en detalle cada una de sus etapas, se deben especificar los supuestos
empleados, en primer término es necesario establecer que el período de estudio a planificar
corresponde a 15 años, la elección de este horizonte se debe por un lado a la necesidad de
realizar una planificación de largo plazo y por otro a un interés comparativo, dado que el
estudio regulatorio conocido en Chile como VAD10 utiliza el mismo período, con lo cual es
10
VAD: Valor agregado de distribución, que busca remunerar a la distribuidora por los costos en que incurre
al llevar la energía que compra a los generadores hasta los consumidores finales. Como la distribución
constituye un monopolio natural, es la autoridad quien debe fijar tal valor, el que posteriormente será
traspasado mediante tarifa a los consumidores. Tal fijación se realiza cada 4 años y consiste en determinar
cuales son los costos de una empresa distribuidora ficticia, empresa modelo, que presta eficientemente el
servicio en la misma zona de concesión, o una similar, que la distribuidora regulada. Es importante señalar
que: “El concepto que está detrás de la definición de la empresa modelo, corresponde a la simulación de una
situación de competencia, cuando aparece un nuevo prestador del servicio con costos y tecnologías actuales,
38
posible contrastar los resultados obtenidos mediante esta metodología con los obtenidos en
el último estudio tarifario. Es por esta necesidad de comparación que se utilizarán los datos
de costos del último informe de VAD, realizado el año 2004, es decir se tomará tal año
como punto de partida del horizonte de planificación, teniendo presente siempre que tal
estudio considera tanto el crecimiento horizontal, aparición de nuevos centros de consumos,
como el crecimiento vertical de la demanda, aumento en el consumo de los clientes ya
existentes. Por el contrario, en el presente trabajo sólo se considera el crecimiento en el
consumo de energía y potencia de los clientes existentes a lo largo del horizonte de estudio.
Otra consideración que se debe tener en cuenta es que en la investigación aquí expuesta,
sólo se realiza la optimización de la red de baja tensión suponiendo que toda la distribución
se realiza mediante redes aéreas, en tanto que el estudio de VAD considera además redes de
distribución subterráneas en aquellos lugares donde la empresa regulada las posee, por
tanto los resultados obtenidos finalmente no serán del todo comparables, pero sí permitirán
observar la bondad de la solución encontrada, realizando un cotejo con los costos en redes
aéreas, número de transformadores empleados, largo de red utilizada, capacidad de
transformación instalada, entre otros parámetros relevantes de comparación.
Para fines del estudio y mostrar la metodología desarrollada se supone un crecimiento
uniforme en toda el área de concesión de 2,75 % en la demanda de potencia, con lo que
aparece un nuevo supuesto, éste es, asumir que es posible conocer la demanda máxima
coincidente de cada uno de los consumos asignados a un mismo transformador, lo cual en
distribución eléctrica de baja tensión es una tarea complicada que sólo puede ser resuelta de
manera aproximada, debido a que casi la totalidad de los clientes conectados a la red de
baja tensión sólo poseen medidores de energía con lo que no es posible contar con un
historial de demanda que permita realizar proyecciones mediante métodos predictivos
clásicos. Debido a que tal proyección es una tarea en si misma que depende de múltiples
variantes, tales como uso de suelo, crecimiento económico, proyectos inmobiliarios, gestión
de la demanda, entre otros, no será resuelta en el presente trabajo cuyo objetivo es plantear
una metodología adecuada al problema de planificación de redes de baja tensión y por tanto
cuya eficiencia le permite acceder al mercado o bajar los precios, de forma tal que los prestadores existentes
deben adaptarse al nuevo precio de equilibrio o simplemente desaparecer” (CNE, 2003).
39
se adoptará la solución propuesta por Inecon11 en el estudio de VAD 2004 (Systep e Inecon
2004), la que consiste básicamente en la determinación de una función del factor de carga
que depende del número de clientes que pertenecen a una determinada agrupación, de tal
manera que conocida la energía que consume una agrupación de clientes sea posible
determinar la potencia máxima coincidente de dicho grupo y con ello dimensionar en forma
óptima las instalaciones. Esta metodología es adecuada dado que las lecturas disponibles
son en esencia de energía, siendo datos confiables, en tanto la curva de factor de carga es
una aproximación que se obtuvo de una muestra representativa de 2000 transformadores
que poseen tanto lectura de energía como de potencia. Así realizando subconjuntos de entre
esos 2000 clientes, a través de simulaciones de Montecarlo, fue posible la construcción de
la expresión para el factor de carga12, señalada en la ecuación (4.3), con la cual es posible,
conociendo la energía, calcular la demanda máxima coincidente para cualquier conjunto de
clientes.
Referente a los supuestos relacionados con la demanda se debe indicar que las cargas se
asumieron del tipo (P + j Q), con un factor de potencia idéntico para todos los consumos de
0,93 inductivo.
α ⋅ Clientes β − δ si Clientes ≤ 500
Fc (%) =
en otro caso
40%
(4.3)
Donde:
11
•
Fc
: factor de carga del grupo de clientes
•
Clientes
: número de clientes de la agrupación.
•
α
: 0,1687
•
β
: 0,1577
•
δ
: 6,3314%.
Ingenieros y Economistas Consultores SA www.inecon.cl
En este trabajo se supondrá como correcto el trabajo de ajuste de factor de carga realizado por Inecon en
“Estudio para el Cálculo de las Componentes de Costo del Valor Agregado de Distribución (VAD), Área
Típica 1: Chilectra” (Systep e Inecon, 2004)
12
40
También se debe constatar que al tratarse de una planificación desde cero el único dato de
entrada lo constituye la demanda de los consumos y su posición, la cual corresponde a la
ubicación georreferenciada de cada uno de los medidores de la mini-zona en cuestión. Sin
embargo la sola ubicación de los consumos no es suficiente, dado que consumos que de
acuerdo a su distancia se encuentran cercanos, podrían estar separados por un accidente
geográfico que no permita la asociación entre ellos. Otra situación posible es que existan
consumos al interior de una zona urbana, que pertenezcan al mismo subconjunto pero que
sean imposibles de unir dado que no existe red vial que los conecte. Para evitar tales
situaciones se propone considerar el trazado vial en el proceso de optimización, por lo cual
se requiere conocer la georreferenciación de todas las calles, o tramos de calles, que
pertenecen a la mini-zona, y la pertenencia de cada uno de los consumos a una única calle,
de esta forma será posible asociar consumos que puedan ser conectados y se evitará el paso
a través de zonas prohibidas.
Por lo cual, como etapa previa al proceso de micro-optimización, se debe realizar para cada
una de las mini-zonas el trazado vial, la asignación de los consumos, y la determinación de
la conectividad vial.
4.3.1
Etapa previa: determinación de la red vial
La necesidad de esta etapa previa, tal y como ya se mencionó, surge del objetivo de lograr
una agrupación posible de los consumos, de forma que las asignaciones propuestas por la
metodología sean replicables en la realidad. Para ello se debe considerar que para toda la
zona en análisis se posee una base de datos con la posición de los consumos y la demanda
de energía de cada uno de ellos, que pueden ser fácilmente ingresados a la metodología. Sin
embargo, con las calles sucede algo más engorroso, dado que los datos disponibles de ellas,
corresponden a una cobertura de ARCVIEW13, es decir corresponden a una representación
vectorial de las calles en un sistema de información geográfica (SIG), entendiendo un SIG
como un sistema basado en computador capaz de trabajar con datos georreferenciados, en
el cual se realiza la entrada, gestión, manipulación, análisis y salida de dichos datos
13
Paquete de programas SIG que trabaja con representaciones vectoriales de cada objeto geográfico ya sea a
través de puntos, líneas, o polígonos.
41
(Aronnof, 1995), debido a tal situación, el acceso a las coordenadas de las calles no es
inmediato, dado que su representación está en el formato de poli-líneas (representación
vectorial) y no como una sucesión de puntos, no obstante, tal representación vectorial, esta
implícitamente basada en la sucesión de tramos, por ende, en este trabajo los datos
señalados se consiguieron con la creación de un programa en Avenue, lenguaje de
programación propio de ARCVIEW 3.2, mediante el cual se pudo obtener la posición
inicial y final de cada tramo que compone una misma calle. Situación que se puede apreciar
en la figura (4.4), donde se muestra el trazado vial para una mini-zona, en ella los puntos
representan a los consumos y los asteriscos representan los vértices de los tramos de calles
obtenidos desde la cobertura en ARCVIEW.
7300
7250
7200
[m]
7150
7100
7050
3.785
3.79
3.795
3.8
[m]
3.805
3.81
4
x 10
Figura 4.4: Trazado vial para una mini-zona
Una vez que se conoce la topología vial es de suma importancia, para garantizar que la red
de baja tensión se trace a través de ella, conocer a que calle pertenece cada consumo, para
conseguir este objetivo se toma como supuesto, que cada consumo esta asociado al tramo
de calle más cercano, asignación que es realizada con el procedimiento general que se
explica a continuación:
42
1. Se calcula la ecuación de la recta para todos los tramos de la mini-zona,
almacenando los vértices que unen un tramo y su ecuación correspondiente.
Recuérdese que dados dos vértices (X1,Y1) y (X2,Y2) , la recta que los une es:
Y −Y
Y = 2 1 ⋅ ( X − X 1 ) + Y1
X 2 − X1
(4.4)
Para los casos en que la pendiente es infinita, es decir en aquellos donde el tramo es
paralelo al eje Y (X2=X1), se modificó la posición de uno de los vértices en tan sólo
unos centímetros, de forma que no se indefiniese la función (ecuación 4.4). Además
en los casos en que existe redundancia de información, esto es cuando los tramos,
no representan intersecciones de calles, sino que simplemente son divisiones en una
misma cuadra, se muestrearon tales vértices de manera obtener la misma
información en un número menor de tramos, con lo que se disminuye el número de
ecuaciones a calcular y por ende el tiempo de iteración de la metodología. Ejemplo
típico de esto, lo constituyen las rotondas en que la información disponible asigna
tramos cada un metro, ya que se trata de emular una circunferencia mediante
polígonos regulares con sobre 100 aristas, no obstante tal exceso de información es
en la práctica irrelevante, por lo que se opta aproximar tales rotondas por decágonos
regulares.
2. Se calcula la distancia entre todos los consumos y todos los tramos de calles, a
través de la ecuación que determina la distancia entre un punto y una recta. Los
cálculos aprovechan el ordenamiento matricial de los datos, con lo que es posible
obtener, sin necesidad de un proceso iterativo, una matriz en que el elemento dij,
indica la distancia entre la recta que representa al tramo i y el consumo j.
3. Se asigna cada consumo a su tramo más cercano. Se debe tener presente que la
distancia calculada indica la distancia perpendicular entre el consumo y la recta, si
se denomina como proyección del consumo sobre la recta, al punto en la recta en el
que se mide tal distancia, se consideran como candidatos factible de asignación,
aquellos tramos en que la proyección del consumo sobre la recta pertenece a un
43
tramo, es decir que se encuentre contenido entre el vértice inicial y final sobre los
que se traza dicho tramo. Con lo que se garantiza que los consumos sean asignados
al tramo de recta más cercano, situación real, lo que no necesariamente coincide con
la recta más cercana. Por lo tanto cada consumo es asignado al tramo de calle
factible más cercano de acuerdo a la distancia euclidiana que los separa.
Con el procedimiento anterior es posible determinar una buena aproximación sobre la
pertenencia de un consumo a una determinada calle, lo que será de gran utilidad a la hora
de trazar la red. En la figura 4.5 se observa la aplicación del procedimiento a una mini zona,
en ella los puntos representan a los consumos y las cruces a sus proyecciones sobre el
trazado de las calles.
7160
7150
7250
7140
7200
7130
[m]
[m]
7150
7120
7110
7100
7100
7090
7080
7050
3.785
3.79
3.795
3.8
7070
3.798
3.805
3.8
3.802
4
[m]
x 10
3.804
4
[m]
x 10
Figura 4.5: Asignación de los consumos a una calle
Por tanto ahora será posible trazar la red de baja tensión soslayando los accidentes
geográficos, dado que se asume que el trazado vial también los evita, así será imposible
trazar una red a través de un cerro, dado que no existirá calle que lo atraviese, sino que por
44
el contrario, será rodeado por la red vial, con esto no sólo se considera la distancia como
parámetro de trazado de la red sino que se utiliza la distancia de comunicación sobre un
grafo determinado (red vial), es decir la distancia vial que une un punto A y B, lo que no
necesariamente coincide con la distancia a campo traviesa entre ambos puntos, logrando
obtener mayor información y por ende una mejor aproximación para resolver el problema
real.
Sin embargo, aún queda un problema importante a resolver en esta etapa previa, el cual esta
dado por evitar asociar en un mismo subconjunto elementos que en la práctica no puedan
ser unidos, debido a la ausencia de red vial que los conecte. En este caso es necesario
señalar, que la zona que se busca planificar es eminentemente urbana, no obstante la
metodología propuesta puede resolver indistintamente zonas de abastecimiento rural y
urbanas, y por cierto una mezcla de ambas. La única distinción al respecto es que si en una
mini-zona no existe trazado vial, lo que probablemente corresponderá a una zona rural, la
distancia a utilizar será simplemente la distancia a campo traviesa, por lo que el problema
en discusión no tiene cabida, ya que cualquier subconjunto será posible. Situación que no
ocurre cuando si existe red vial, caso típicamente urbano, en el que el trazado no puede
pasar por zonas edificadas y debe entonces respetar a cabalidad el callejero, es decir se
unirán en una misma red sólo aquellos consumos que puedan ser comunicados a través de
la red vial. Para evitar entonces la asignación a priori de cargas no comunicadas, se divide
cada mini-zona en islas viales, donde cada isla vial corresponde al conjunto tramos de red
conectados en que es posible acceder a cualquiera de los tramos de la isla desde cualquier
tramo de ella mediante una sucesión de tramos intermedios que los unen.
En términos matemáticos, sea el trazado vial en la mini-zona un grafo G (V, E) no
orientado, con V el conjunto de vértices y E el conjunto de arcos (vértices y tramos de la
red vial respectivamente). El grafo se asume no orientado14, puesto que para efectos de la
red eléctrica, no es de importancia conocer el sentido de las calles. De acuerdo a la teoría de
grafos se tienen las siguientes definiciones:
14
Grafo no orientado, también denominado grafo no dirigido es un par G=(V,E), con V conjunto finito de
vértices y E conjunto de arcos, donde un arco es un par no ordenado (u,v) con u,v pertenecientes a V y u
distinto de v.
45
•
Se dice que entre los vértices vo y vk existe un recorrido de longitud k si existe una
sucesión de vértices y aristas de la forma {(vo, v1), (v1, v2), (vi, vi+1), …, (vk-1, vk)}.
•
Se denomina camino de longitud k entre los vértices u y v pertenecientes a V, a un
recorrido de longitud k desde el vértice u al vértice v que tiene k aristas diferentes
entre sí.
•
Si existe un camino P desde u hasta v se dice que v es alcanzable desde u mediante
P.
•
Se dice que el grafo es conexo si dos vértices cualquiera pertenecientes a V están
conectados por un camino de longitud k, con k: {1,...,E}.
•
La relación, u es alcanzable desde v y v es alcanzable desde u, sobre el conjunto de
los vértices V del grafo es una relación de equivalencia. Las clases de equivalencia
son el conjunto de vértices sobre los que se puede establecer entre todos sus vértices
la relación de equivalencia y finalmente las componentes conexas de G, son todos
los grafos (subconjuntos del grafo principal) generados a partir de las clases de
equivalencia.
A modo de ejemplo en la figura 4.6 se presenta un grafo en donde es posible observar tres
componentes conexas, una está demarcada por una circunferencia, otra por un rectángulo, y
la tercera corresponde al resto del grafo que no se encuentra delimitado.
46
8550
8500
8450
8400
[m]
8350
8300
8250
8200
8150
8100
8050
3.88
3.89
3.9
[m]
3.91
3.92
4
x 10
Figura 4.6: Componentes conexas de la red vial
De la figura y de las definiciones anteriores se desprende que el número de islas viales al
interior de una mini-zona es igual al número de componentes conexas del grafo que
representa a la red vial al interior de dicha mini-zona, donde cada una de tales islas
constituye una red conexa. Por lo tanto el ejercicio a realizar consiste precisamente en
determinar el número y estructura de cada componente conexa, denominada en este trabajo
isla vial. Para ello se realiza una algoritmo constructivo, se encuentra en primer término la
matriz de tramos coincidentes, cuya variable Xij, indica si el tramo i con el tramo j tienen un
vértice en común, el valor uno indica que sí existe vecindad y el valor cero indica la no
existencia de vértices comunes, posteriormente se comienza en un arco cualquiera del grafo
total, y por medio de la matriz de tramos comunes se identifican los tramos vecinos, los
cuales pertenecen claramente a la misma isla vial, luego se incorporan progresivamente los
vecinos de los vecinos encontrados, y así sucesivamente hasta que no es posible incluir más
vecinos, de esta manera se construye una isla (subgrafo conexo), si todos los tramos (arcos)
de la mini-zona son incluidos implica que la red vial de la mini-zona es conexa, de lo
contrario se elige un vértice que no pertenezca a la isla encontrada y se vuelve a realizar el
procedimiento, secuencia que se repite hasta que no queden tramos sin asignar.
47
Una vez que se tienen las islas viales, y teniendo en consideración que todos los consumos
al interior de cada una de ellas son posibles de comunicarse a través de la red vial, se debe
incorporar una pequeña modificación al algoritmo propuesto en el diagrama de flujo de la
figura 4.3 (referente a la micro-optimización), esta es que en vez de realizar la metodología
para cada mini-zona se realizará para cada isla de cada mini-zona, con lo cual se evita la
asignación de consumos entre zonas sin conectividad vial, con esta consideración se puede
comenzar con el análisis de cada una de las etapas ahí señaladas. Considérese que el
algoritmo parte con la asignación de i transformadores, en particular con i igual a uno.
4.3.2
Ubicación y asignación de los transformadores
La ubicación preliminar de los transformadores se realiza vía k-means sin la consideración
de la red vial de cada isla, sino que únicamente en atención a la distancia euclidiana de los
consumos, tal como se observó en la explicación de k-means, el algoritmo parte con la
ubicación de los centros en cualquier posición, elegidos aleatoriamente entre los consumos,
con lo cual no se garantiza obtener siempre una misma solución, para minimizar tal efecto,
se usan tres lanzamientos, es decir se realiza la ubicación de i centros tres veces para así
escoger el caso de menor distorsión.
Tabla 4.2: Menor distorsión por número de lanzamientos
Nº de
Lanzamientos
1
2
3
4
5
6
7
8
9
10
Distorsión
Total (Km)
409132
402308
396766
397964
397355
400994
392883
390408
386930
395619
Nº de
Lanzamientos
10
11
12
13
14
15
16
17
18
19
Distorsión
Total (Km)
396566
397209
405501
401698
398206
394098
385206
392108
388492
396934
La elección particular de tres lanzamientos se debe por un lado a reconocer la naturaleza no
determinística del método k-means, y con ello asumir que un único lanzamiento no entrega
48
necesariamente la mejor respuesta, y por otro no incrementar sin necesidad los tiempos de
ejecución, dado que se podrían, en el extremo, realizar cientos de lanzamientos para así
elegir con mayor probabilidad una mejor elección, con un tiempo de ejecución también
cientos de veces mayor. No obstante de la tabla 4.2, donde se muestra la menor distorsión
total para 300 mini-zonas cuando se realizan distintos lanzamientos, se puede observar que
no existen grandes beneficios en realizar para cada ubicación de centros un número
superior a 3 lanzamientos, por lo que se elige dicho número en virtud que representa un
buen mix entre calidad de la solución y tiempo de ejecución asociado.
Una vez que se realiza la ubicación preliminar de los transformadores, estos de acuerdo a la
metodología ya planteada, referente a la asignación de las calles, son re-ubicados en la calle
más cercana, de forma que también su conexión a los consumos asociados respete la
topología de la red vial de su mini-zona correspondiente.
Luego de esto, al conocerse ya la ubicación sobre la red vial de cada transformador y sus
consumos asociados, se asigna considerando la tasa de crecimiento de la demanda la
capacidad de cada uno de ellos, siguiendo los siguientes pasos:
1. Se calcula la demanda media que debe satisfacer el transformador en el año base,
esto es, se suman las energías de cada uno de los consumos asignados al
transformador y se divide por el número de horas del período (8760 horas).
2. Se obtiene el factor de carga a partir de la expresión (4.3) considerando el número
de clientes asociados al transformador.
3. Se obtiene la demanda máxima coincidente (Dmax) de los consumos para el año
base, a partir de la demanda media (Dm) y del factor de carga (Fc)
Fc =
Dm
D
⇒ Dmax = m
Dmax
Fc
(4.5)
4. Se asigna el menor transformador capaz de abastecer la evolución de la demanda
máxima coincidente a lo largo del horizonte de estudio.
Si no existe un transformador capaz de satisfacer la demanda de sus consumos asociados,
es decir uno de los i transformadores cubre una demanda superior a la que es capaz de
49
entregar el mayor transformador disponible15, entonces se vuelve a realizar el proceso de kmeans, pero esta vez con i+1 ubicaciones, proceso que se realiza hasta que todas las
localizaciones tienen asignado un transformador (capacidad de transformación).
Por tanto al finalizar el proceso se tiene la ubicación y capacidad de cada transformador
más la ubicación de cada uno de los consumos que deben abastecer. El siguiente paso es
determinar la topología y costos de la red de baja tensión que los conecta con las cargas que
deben suministrar, por lo que es necesario calcular el costo de los conductores empleados y
el costo de las pérdidas asociadas a la red.
4.3.3
Trazado de red
El criterio empleado para obtener el trazado de la red se basa primordialmente en la
distancia que existe entre los consumos, además, con el fin de incorporar la incidencia del
flujo en la red, el transformador se moverá a una nueva ubicación una vez que la red óptima
sea escogida, de manera de estar aproximadamente en un nodo donde la red se encuentre
equilibrada, es decir que la diferencia entre los flujos que salen de él no sea considerable.
Es por esto que el trazado de la red consistirá básicamente en trazar el árbol de mínima
expansión con raíz en la ubicación del transformador. Entendiéndose a tal árbol como el
grafo no dirigido de menor distancia que conecta todos los nodos sin generar ningún ciclo16
(grafo acíclico), y siendo la raíz del árbol el único vértice del grafo que no tiene un arco que
lo preceda.
Se debe señalar que el problema del árbol de mínima expansión es un problema clásico de
optimización combinatorial. Fue formulado por primera vez en 1926 por Boruvka,
precisamente en un problema de electrificación, luego de ello esta modelación ha sido
aplicada para enfrentar numerosos problemas en variadas áreas como telecomunicaciones,
sistemas de transporte, entre otros, a través de procedimientos que han permitido su
solución, los cuales debido a su complejidad algorítmica hacen del árbol de mínima
expansión un problema del tipo P, es decir, tales algoritmos resuelven el problema en
tiempo polinomial. Estos fueron desarrollados en forma casi paralela por Kruskal (1956) y
15
16
La tabla con las capacidades y costos de los transformadores disponibles se muestra en el Anexo D
En un grafo no dirigido un camino {V0, V1, V3, …, VK} forma un ciclo si V0=VK y los Vi son distintos
50
Prim (1957), ambos corresponden a algoritmos voraces, lo que significa que en cada
iteración escogen la mejor alternativa para ese instante sin considerar los pasos futuros.
Considerando un grafo G (V, E) donde cada arco E tiene un peso (valor) asociado, que en el
caso en cuestión corresponde a la distancia que existe entre los nodos que comunica el arco,
el algoritmo de Kruskal se puede resumir en los siguientes pasos:
1. Se marca el arco con menor peso. Si hay más de uno se escoge cualquiera de ellos.
2. De los arcos que quedan, se marca el que tenga menos peso, nuevamente si hay más
de uno se escoge cualquiera de ellos.
3. Repetir el paso 2 siempre y cuando el arco escogido no forme un ciclo con los ya
marcados.
4. El algoritmo termina cuando existen n-1 arcos marcados, siendo n el número de
nodos del grafo.
En tanto el algoritmo de Prim se puede resumir como sigue:
1. Se marca un nodo cualquiera como nodo de partida, denominado raíz del árbol, con
lo que se inicializa.
2. Se agrega al árbol aquel vértice que este conectado a cualquier vértice del árbol por
el arco de menor peso.
3. Se repite el paso 2 siempre que el arco que se incluye conecte un vértice que
pertenece al árbol con uno que aún no pertenece a él.
4. El proceso termina cuando todos los vértices pertenecen al árbol.
Dado que ambos algoritmos presentan la misma complejidad O(n log n), con n el número
de vértices (tamaño de la entrada), se opta arbitrariamente, por utilizar el algoritmo de Prim
en el trazado de la red en atención a su fácil implementación computacional. En la figura
siguiente se puede apreciar su aplicación para un transformador y sus cargas asociadas.
51
7300
7250
7280
7260
7200
[m]
[m]
7240
7150
7220
7100
7200
7050
7180
3.785
3.79
3.795
3.8
[m]
3.805
3.81
3.793
3.794
3.795
4
x 10
3.796
[m]
3.797
3.798
3.799
4
x 10
Figura 4.7: Árbol de mínima expansión
Sin embargo, en ella es fácilmente apreciable que la aplicación directa del Algoritmo de
Prim no respeta las zonas prohibidas dado que se observan cruces a través de las zonas
urbanas (entre calles), lo que se evita si se considera el trazado vial como restricción para el
trazado de la red de baja tensión. Por lo tanto para guiar el camino del algoritmo se utilizan
las proyecciones de los consumos sobre las calles en vez de su posición real, guardando
siempre la distancia desde los consumos a su proyección ya que esta constituye una
aproximación a la longitud de los empalmes a emplear. Sin embargo, tal información si
bien permite que consumos que pertenecen a una misma calle queden conectados, no
garantiza que no existan cruces en zonas distintas a las esquinas, por lo cual se incluyen
nodos auxiliares que permitan señalar de mejor manera las rutas posibles del algoritmo,
estos nodos son los vértices de los tramos de calle, lo que ayuda a garantizar bifurcaciones
sólo en las intersecciones de tramos, y otros nodos extras en aquellos tramos que si bien
pertenecen a la mini-zona no poseen consumos de manera de permitir las uniones de
consumos a través de tramos que no los poseen. En términos sencillos el algoritmo
empleado es:
52
1. Se inicializa el árbol con la posición del transformador (raíz del árbol).
2. Se agrega al árbol aquel nodo aún no incluido, real o auxiliar, que esté más cercano
a cualquiera de los nodos del árbol, siempre y cuando tal nodo pertenezca al mismo
tramo.
3. Se repite el paso 2 hasta que todos los nodos del tramo son incluidos.
4. Se agrega al árbol aquel nodo aún no incluido, real o auxiliar, más cercano a los
vértices del conjunto de tramos ya incluidos que pertenezca a un tramo vecino,
definiendo tramo vecino a aquel que comparte un vértice con el tramo en cuestión.
5. Se repite el paso 2 y 3 para el nuevo tramo incluido.
6. Se repite el paso 4 y 5 hasta que todas las proyecciones de los consumos sobre los
tramos de calle, sean agregados, situación que hace que el algoritmo finalice.
Del paso 6 se desprende que el criterio de parada no esta dado por el uso de todos los
nodos, reales (proyecciones de los consumos) y auxiliares, con lo que posiblemente
caminos que sigue el algoritmo a través de nodos auxiliares no conectan nodos reales Para
soslayar tal efecto se lleva a cabo un proceso de poda, en que todos aquellos nodos
auxiliares que no entregan información, es decir que sólo sirvieron para ampliar el espacio
de búsqueda, pero que finalmente no conectaron nodos reales son eliminados, de manera de
tener únicamente el árbol de mínima expansión en que todas las hojas17 del árbol son nodos
reales. Ejemplo del trazado de la red se presenta en la figura 4.8.
17
Si (u, v) es el último arco en el camino desde la raíz del árbol hasta el vértice v, entonces se dice que u es el
padre de v y v es hijo de u. La raíz es el único nodo del árbol que no tiene padre. Un nodo sin hijo se
denomina hoja y el resto de los nodos se denominan nodos internos.
53
7400
7300
7350
7300
7250
[m] 7250
[m]
7200
7200
7150
7100
7150
7050
7100
7000
6950
7050
6900
3.84
3.85
3.86
3.87
[m]
3.88
3.89
3.84
3.845
4
x 10
3.85
3.855
[m]
3.86
4
x 10
Figura 4.8: Trazado de la red de baja tensión
Si bien en la figura anterior, se aprecia claramente el trazado de la red de baja tensión
respetando la topología vial, y que la posición del transformador se ubica aproximadamente
en el centroide de la red, lo que ayuda a garantizar una buena solución, dado que de esta
manera los flujos se reparten en forma equilibrada, tal situación no es garantizable para
todos los casos, debido a que la elección del centroide se realiza en la etapa de k-means, sin
la consideración vial, sino que de acuerdo a la cercanía de consumos pertenecientes a una
misma isla de una mini-zona determinada, con lo cual la proyección de dicho centroide
sobre el tramo de calle más cercano, no necesariamente coincide con el centroide de línea
de la red de baja tensión trazada (situación que si ocurre en la figura 4.8). Es decir en tal
ubicación no se produce el mejor equilibrio entre los flujos que salen del transformador,
razón por la cual se realiza la reubicación de los transformadores mediante el equilibrio de
la red, metodología descrita a continuación.
Equilibrio de red
En esta sub-etapa se lleva acabo la re-localización de cada uno de los transformadores
desde su posición inicial dada por la proyección del centroide calculado con k-means sobre
el tramo de red más cercano, a una nueva posición en que los flujos que salen desde el
transformador sean lo más parecidos posibles, ello en virtud de que es imposible equilibrar
totalmente la red (flujos iguales por todas las ramas que salen del transformador), dado que
54
para disminuir el espacio de búsqueda constituido por cualquier posición (x, y)
perteneciente a la red, se consideran como ubicaciones factibles del transformador sólo
aquellos nodos incluidos en la red, ya sea se trate de consumos o de nodos auxiliares, por
tanto el equilibrio total de la red puede que no pertenezca al conjunto de posiciones
factibles.
Para llevar a cabo el equilibrio en cuestión, se propone un algoritmo iterativo, puesto que
no existe una metodología directa para encontrarlo, de hecho se debe hacer notar que el
centroide de una figura compuesta por tramos no necesariamente pertenece a la figura, sino
que puede ubicarse externo a ella, lo que no garantiza encontrar el equilibrio de red
buscado. La metodología propuesta se basa en el hecho que un movimiento del
transformador, del que se supone salen dos ramas, desde su posición inicial hacia el nodo
hijo de la rama de mayor flujo, hará que tal flujo disminuya en ∆P y por tanto la rama de
menor flujo aumentará en ∆P. El algoritmo simplificado es el siguiente:
1. Se calculan los flujos que salen por ambas ramas del transformador. Se define
equilibrio como el valor absoluto de la diferencia entre los flujos.
2. Se ubica el transformador en el nodo hijo con mayor flujo.
3. Se revisa el número de ramas que salen desde la nueva posición
Si el número de ramas es 2
3.1. Se calculan los flujos que salen por ambas ramas
3.2. Se repiten los pasos 2 y 3 hasta que el equilibrio no disminuya más.
Si el número es mayor que 2
3.4 Se parte desde los hijos de la nueva posición, la que no se considera factible, y
se realiza el proceso 3, siempre y cuando por la rama se mejore el equilibrio
4. El proceso finaliza cuando no es posible seguir ningún camino de la red que mejore
el equilibrio. Nótese que si un camino empeora el equilibrio, no se continúa la
búsqueda a través de él, con lo que no se revisan todas las ubicaciones sino sólo las
que están en la dirección del descenso.
55
[m]
[m]
7950
7250
7900
7200
7850
7150
7800
7100
7750
7050
7700
3.785
3.79
3.795
3.8
[m]
3.805
3.81
3.8
4
x 10
3.805
3.81
[m]
3.815
3.82
4
x 10
Figura 4.9: Equilibrio de red
En la figura 4.9 se muestra la aplicación del algoritmo de equilibrio para dos redes, en ellas
el triángulo de mayor tamaño representa la posición inicial del transformador, mientras que
el triángulo de menor tamaño corresponde a la posición de equilibrio de la red, los nodos no
asignados corresponden a los nodos auxiliares no utilizados en el trazado de la red
(producto del proceso de poda). Se debe destacar que el equilibrio de red incorpora mejoras
en la solución final, puesto que disminuye los costos producto de una mejor asignación de
los conductores, de hecho el ahorro producto de su incorporación oscila entre 1,5% a 3%
respecto a la solución que no incorpora el equilibrio. Por ejemplo, en una corrida del
modelo para la comuna de Macul, considerando mini-zonas de 500 por 500 metros, se
obtiene un costo de 1.906.194.90118 pesos si no se considera el equilibrio, en cambio al
incluirlo, el nuevo costo es de 1.820.926.206 pesos, lo que representa un ahorro de 4,47 %,
no obstante el incremento en el tiempo de ejecución para este ejemplo es de 114 %,
aumentando desde 3,05 minutos a 6,55 minutos. Por lo que, evidentemente, existe un trade
off entre tiempo de ejecución y calidad de la solución, el que se vuelve más importante en
la medida que la zona a optimizar crece, situación que se analizará en detalle al finalizar el
18
Los datos presentados en este párrafo corresponden a valores promedio obtenidos a partir de 20 corridas
distintas del modelo. Para más detalles refiérase a la sección Iteraciones y Resultados del presente capítulo.
56
presente capítulo, una vez que todas las etapas del proceso de micro-optimización se
encuentren explicitadas.
4.3.4
Selección óptima de conductores
Una vez que se conoce el trazado de la red de baja tensión asociada a cada uno de los
transformadores de la mini-zona, ya sea incluyendo o no el equilibrio de red, es necesario
conocer cuanto vale dicha ruta óptima, es decir se debe valorizar el trazado, en cuanto uso
de material y longitud del mismo. Del apartado anterior, se conoce la distancia existente
entre cada uno de los nodos y por ende la distancia de cada uno de los tramos que tienen
asociado algún tipo de conductor. El valor del conductor asociado a cada tramo dependerá
del tipo de material empleado y del flujo que por él atraviesa, por lo que es necesario llevar
a cabo una selección óptima de conductores, de manera que el conductor escogido para
cada tramo minimice los costos de inversión más pérdidas.
La selección óptima de conductores ha sido abordada en numerosas investigaciones
(Adams y Laughton, 1974, Wall et al, 1979, Tram y Wall, 1988, Mandal y Pahwda, 2002),
siendo uno de los procedimientos más usados en planificación el de separar el problema de
selección del resto de la red, esto es, elegir un conductor pseudo óptimo para cada uno de
los tramos en función exclusiva de los flujos que lo atraviesan y las variables eléctricas y
económicas relacionadas con el flujo en cuestión, sin considerar el efecto que tal elección
tiene aguas abajo de la red (Mandal y Pahwda, 2002). Dado que el procedimiento ya ha
sido realizado y no constituye un aporte original al problema de planificación, en el
presente trabajo se opta por usar los resultados obtenidos en el estudio de VAD del año
200419 (Systep e Inecon, 2004), no obstante tal metodología será igualmente presentada, de
manera de constatar las variables involucradas en el proceso de optimización de redes de
baja tensión, en lo referente a selección de conductores.
Antes de ello, para utilizar en forma directa tal metodología es fundamental conocer los
flujos de potencia que circulan por cada uno de los tramos, tarea que no es trivial, dada la
considerable cantidad de cargas involucradas en cada una de las redes, situación que hace
19
El uso de los mismos valores se realiza para poder tener un marco comparativo que permita analizar los
resultados obtenidos en la investigación aquí propuesta.
57
necesario realizar algún tipo de simplificaciones que permitan obtener buenas soluciones,
sin necesidad de resolver un algoritmo de flujo AC exacto para encontrar la respuesta, es
decir sin la utilización de herramientas tradicionales para flujos de potencias tales como los
métodos de descenso de Newton, Gauss, y simplificaciones de los mismos. En ellos la
componente matricial20 es relevante, y en el caso de redes de baja tensión el número de
cargas es elevado y por tanto la dimensión de las matrices involucradas en tales
procedimientos también lo son, situación que produce gastos excesivos de memoria y
tiempo de ejecución producto de la necesidad de invertir y trabajar con grandes matrices,
tiempos que afectan el ejercicio de planificación puesto que en el algoritmo propuesto se
resuelven miles de flujos de potencia, siendo conveniente aprovechar la característica radial
de la red de baja tensión, y realizar supuestos, cuya ejecución no incluye en la planificación
más error que el posible asociado a la proyección de la demanda.
Modelo de flujo de potencia
El elemento característico de las redes de baja tensión es su topología radial, por lo que en
el flujo de potencia hay una relación directa entre las cargas entre un nodo con su nodo
padre17 y con sus nodos hijos17, sin existir intercambios entre nodos de un mismo padre,
situación que permite identificar y formular el problema en términos simples, a diferencia
de lo que sucede con redes enmalladas donde los flujos y voltajes en cada uno de los
consumos inciden en el resto de la red.
En el problema a resolver, las cargas están representadas por un modelo PQ, es decir se
asume que se conoce su potencia activa y reactiva, y por ende implícitamente su potencia
aparente, las cargas en su totalidad se consideran de naturaleza inductiva con un factor de
potencia de 0,93, además se considera que la red se encuentra equilibrada, supuesto que si
bien es difícil de adoptar en la operación21 de un sistema de distribución real, en el cual las
cargas asignadas a cada fase no se encuentran del todo bien distribuidas, en un ejercicio de
planificación se asume que se tomarán las medidas año a año para que la red si se encuentre
equilibrada, dado que ello implica mejoras en la operación del sistema y por tanto se asume
20
Las matrices son del tipo n x n, con n el número de nodos (cargas) conectados a la red.
58
que en el largo plazo existen los incentivos suficientes para que la red se encuentre en dicho
estado, entonces al asumir el equilibrio se puede resolver la red trifásica de acuerdo a su
equivalente monofásico. En atención a lo mencionado, la primera ley de Kirchhoff en una
red radial esta dada por la ecuación 4.6 (Peco, 1999):
R
S i = Li + SLi + ∑ S k
(4.6)
k =1
Si
2
Li = I i ⋅ Z i =
Donde:
• Si
• Li
• SLi
• R
• Zi
• Ii
• VA(i)
2
V A( i )
2
(4.7)
⋅ Zi
es la potencia aparente al comienzo del tramo i.
: son las pérdidas en el tramo i.
: es la demanda aparente del nodo i.
: es el número de ramas que salen del nodo i.
: es la impedancia del tramo i.
: es la corriente que circula a través del tramo i.
: es el voltaje aguas arriba del nodo i.
:
Desarrollando la ecuación 4.7 se tiene que:
Li =
Pi + j ⋅ Qi
V A( i )
2
2
(
⋅ (r + j ⋅ x ) =
i
i
) ⋅ (r + j ⋅ x ) = r ⋅ (P
2
Pi 2 + Qi2
V A( i )
i
i
2
i
i
2
+ Qi2
V A( i )
2
) + j ⋅ x ⋅ (P
i
2
i
+ Qi2
V A(i )
)
2
Con:
•
•
•
•
Pi
Qi
ri
xi
: es la potencia activa al comienzo del tramo i.
: es la potencia reactiva al comienzo del tramo i.
: es la resistencia del tramo i.
: es la reactancia del tramo i.
Reemplazando Li en la ecuación 4.6 y anotando las variables en su expresión compleja, se
tiene que la potencia aparente al principio del tramo i es:
Pi + j ⋅ Qi =
21
(
ri ⋅ Pi 2 + Qi2
V A(i )
2
) + j ⋅ x ⋅ (P
i
i
2
+ Qi2
V A(i )
2
) + ( PL
i
R
+ j ⋅ QLi ) + ∑ (Pk + j ⋅ Qk )
k =1
La operación se refiere a la actividad diaria de explotación de las redes de distribución, estos es maniobras a
ejecutar en caso de falla de algún componente, reconfiguración de redes, inyección adicional de reactivos, etc.
59
Igualando la parte real del lado derecho de la ecuación con la parte real del lado izquierdo,
y haciendo lo mismo con la parte imaginaría es posible obtener la expresión para la
potencia activa y reactiva, respectivamente, para una red de topología radial.
Pi =
Qi =
(
ri ⋅ Pi 2 + Qi2
V A(i )
2
(
) + PL
xi ⋅ Pi 2 + Qi2
V A(i )
2
R
+ ∑ Pk
i
(4.8)
k =1
) + QL
i
R
+ ∑ Qk
(4.9)
k =1
Donde
•
•
PLi
QLi
: es la demanda activa del nodo i.
: es la demanda reactiva del nodo i.
Las expresiones (4.8) y (4.9) por sí solas no son suficientes para determinar los flujos que
circulan a través de los distintos tramos de la red, debido a que no se conoce el voltaje
aguas arriba del tramo, por lo que es necesario encontrar una tercera relación que permita
calcular |VA(i)|2 en función de Pi y Qi, de tal forma de tener tres ecuaciones con tres
incógnitas y así resolver el sistema para encontrar las variables en cuestión. Sin embargo,
puesto que se trata de una red de distribución de baja tensión se puede realizar una
simplificación importante, la que consiste en despreciar los términos cuadráticos de las
ecuaciones (4.8) y (4.9), ello dado que en los sistemas de distribución las pérdidas de cada
tramo son pequeñas en relación al flujo que los atraviesa (Rudnick et al, 1997, Peco, 1999),
de forma tal que al considerarse como cero el valor de Pi2 + Qi2, y suponiendo que VA(i) 2
siempre es distinto de cero (para que la función no se indefina), se tienen las siguientes
ecuaciones simplificadas que fueron utilizadas en el presente trabajo:
R
Pi = PLi + ∑ Pk
(4.10)
k =1
R
Qi = QLi + ∑ Qk
(4.11)
k =1
En las cuales se puede apreciar la independencia tanto de los flujos activos como reactivos
del voltaje en los nodos, posibilitando de esta manera, un cálculo rápido y simplificado en
60
el que partiendo desde los nodos extremos (hojas del grafo), se van agregando las
demandas aguas arriba, para así conocer los flujos en todos los arcos del grafo que
representa la red de baja tensión. Al implementar tal procedimiento se puede establecer el
flujo que circula por cada tramo. Nótese que las ecuaciones para la determinación del flujo
son independientes del tipo de conductor, no dependen de la impedancia de la línea, con lo
que el procedimiento de calcular los flujos para luego elegir el conductor es válido en el
marco de los supuestos realizados.
Metodología de selección de conductores
Para comprender la forma en que se realiza la selección, se deben tener presentes los
elementos fundamentales que en ella intervienen, por un lado se tienen los costos fijos
representados por la inversión necesaria en cada uno de los conductores que se realiza al
inicio del período de estudio, y por otro lado, los costos variables representados por los
costos asociados a las pérdidas de energía y potencia que dependen de la cantidad de
corriente que circula por cada conductor y que se producen durante todo el horizonte de
estudio, variando año a año producto del crecimiento de la demanda. En consideración a lo
anterior, para poder realizar una comparación entre los costos que se producen en los
distintos años, se recurre a la técnica tradicional de evaluación de proyectos, denominada
valor actual neto o también conocida como valor presente, en la que se incluyen, además de
los costos de inversión y operación de cada tipo de conductor22, variables como la
depreciación y valor residual de los conductores y parámetros como la tasa de descuento,
que identifica el riesgo del proyecto, y la tasa de impuesto.
Así, el valor actual neto de un determinado conductor por unidad de longitud ($/km.) será
una función que varía con respecto a la corriente que lo atraviesa, siempre y cuando dicha
corriente no sobrepase sus límites térmicos, además se debe reiterar que el período de
análisis corresponde a 15 años y señalar que para el cálculo de la depreciación y el valor
residual se considera una vida útil de 30 años para los conductores.
Entonces la expresión para el valor actual neto de un conductor tipo i, VANi (I), será:
22
El listado de conductores disponibles con sus respectivos precios, se encuentra en el anexo D
61
15
VAN i ( I ) = INVi ,0 + ∑
CLi ,k ⋅ (1 − Timp) − Depi ,k ⋅ Timp
k =0
(1 + r )
k
(4.12)
Donde
•
INVi,0 : inversión inicial en un conductor del tipo i.
•
CL(I)i,k : costo de pérdidas del conductor i en el año k para un valor de corriente I.
•
Timp
•
Depi,k : depreciación del conductor i en el año k.
: tasa de impuestos que para efectos de la evaluación se consideró en 17 %.
Es importante explicitar la relación que existe entre las pérdidas y la corriente que los
atraviesa, tales relaciones y datos fueron obtenidos íntegramente del informe de VAD
período 2004-2008 (Systep y Inecon, 2004):
“Se consideran las pérdidas de potencia y de energía del conductor. El cálculo se realiza
según las siguientes ecuaciones:
I 2 ⋅ ri
CPPki = ρ p ⋅ k
⋅ fcon 2 ⋅ f exp⋅ 12
1000
2
I ⋅ ri
CPE ik = ρ e ⋅ k
⋅ fcp ⋅ 8760
1000
Donde
CPPik
CPEik
Ik
fcon
fexp
fcp
: Costo de pérdidas de potencia del conductor de tipo i el año k. [$]
: Costo de pérdidas de energía del conductor de tipo i el año k. [$]
: Corriente en el año k. [Amp]
: Factor de coincidencia en alta tensión de las demandas presentes en la punta del
sistema (0,85).
: Factor de expansión de las pérdidas de potencia en alta tensión, en horas de
punta del sistema eléctrico (1,016).
: Factor de carga de las pérdidas
Considerando un factor de carga de 32% se calcula el factor de carga de las pérdidas
según:
1, 5
fcp = (fc )
Finalmente, el costo total de pérdidas se obtiene de la suma de costos de pérdidas de
energía y potencia”
62
La ecuación (4.12) establece el VAN de un determinado conductor como función de la
corriente que circula por él, entonces, si por cierto tramo atraviesa un flujo P, que
determina implícitamente una corriente I, bajo un escenario determinado de crecimiento de
demanda, se evalúa la función de VAN de todos los conductores para tal corriente I,
escogiéndose como alternativa óptima, aquel conductor cuyo VAN sea el menor para dicha
corriente. Así los resultados obtenidos para la tasa supuesta de 2.75 % fueron:
Tabla 4.3: Resultado selección óptima de conductores
Corriente
Mínima (A)
Corriente
Máxima (A)
Sección
(mm2)
Costo ($/km)
Tipo de
Conductor
0
23
26
42
88
132
22
25
41
87
131
625
16
35
50
120
240
300
259.827
331.750
404.400
658.161
1.496.998
1.874.000
Cobre
Aluminio
Aluminio
Aluminio
Aluminio
Aluminio
Lo que es interpretado por el algoritmo de la siguiente manera, si la corriente que circula
por un tramo de la red se encuentra entre 0 y 22 A, entonces se utilizará un conductor de
cobre de 16 mm2 en dicha sección, de igual manera se procederá para todos los tramos de la
red en concordancia con lo establecido en la tabla 4.3.
4.3.5
Cálculo de pérdidas de energía
De la etapa anterior, es posible conocer cual es el mejor conductor para un tramo a partir
del flujo que por él circula, dicha elección se realiza en atención exclusiva al tramo en
análisis, es decir sin la consideración de los tramos aguas abajo del tramo calculado, y por
ende sin la consideración de su acción en las caídas de tensión en el resto de la red. Por esta
razón se incorpora a la función objetivo el costo de las pérdidas de energía, que
implícitamente incorporan en el proceso de optimización las caídas de tensión, debido a que
actúan como una penalización a las caídas de voltaje (Sanhueza, 1994, Fawzi et al, 1983),
63
dado que un incremento en ellas (disminución de los voltajes) implica un aumento de las
pérdidas23 y por ende de su costo final.
Para poder valorizar las pérdidas de energía se debe tener presente, que el ejercicio de
planificación considera demanda de potencia, y por tanto se tiene para cada red el valor de
las pérdidas de potencia coincidentes entre los consumos que son abastecidos por un mismo
transformador. Tales pérdidas de potencia constituirán el indicador fundamental para el
posterior cálculo de las pérdidas de energía, por lo que su determinación es de vital
importancia. Del desarrollo de la ecuación (4.7) se tiene que las pérdidas activas24 están
dadas por:
LACTIVASi =
ri ⋅ ( Pi 2 + Qi2 )
VA ( i )
2
(4.13)
De cuya ecuación se conoce el flujo activo y reactivo, puesto que fueron calculados en la
etapa anterior para cada tramo del trazado de la red, y además se conoce la resistencia, dado
que al realizar la elección del conductor, es posible determinar sus características técnicas
en función del tipo de conductor escogido y del largo del tramo de red, por lo que la única
variable desconocida es el voltaje aguas arriba del nodo i, VA(i). Para determinarla,
considérese la ecuación (4.14) que representa la aplicación de la ley de ohm a un tramo de
una red radial.
VA(i ) = Vi + I i ⋅ Zi
(4.14)
Recordando que tales variables constituyen cantidades fasoriales, entonces la expresión
cartesiana de la ecuación (4.14), donde el subíndice R representa la parte real y el subíndice
I la parte imaginaria, es:
VA(i ) R + jVA( i ) I = (ViR + jViI ) + ( I iR + jI iI ) ⋅ ( ri + jxi )
Despejando la parte real y la parte imaginaria para Vi, se tiene:
ViR = VA(i ) R − ri I iR + xi I iI
23
(4.15)
Situación claramente apreciable en la ecuación (4.7) donde una disminución del voltaje genera una aumento
en las pérdidas.
24
Las pérdidas activas son las que generan costos, dado que representan energía que se deja de vender
producto de su disipación en forma de calor (efecto joule I 2R)
64
(4.16)
ViI = VA(i ) I − xi I iR − ri I iI
De donde para determinar |Vi|2 basta con sumar los cuadrados de las ecuaciones (4.15) y
(4.16), obteniéndose la siguiente relación:
2
Vi = (VA2(i ) R + VA2( i ) I ) + ( I iR2 + I iI2 )( ri 2 + xi2 ) − 2ri ( I iRVA( i ) R + I iIVA( i ) I ) − 2 xi ( I iRVA(i ) I − I iI VA(i ) R )
2
2
2
2
Vi = VA( i ) + I i ⋅ Z i − 2ri ( I iRVA(i ) R + I iIVA( i ) I ) − 2 xi ( I iRVA( i ) I − I iI VA(i ) R ) (4.17)
No obstante la relación anterior está expresada en términos de corriente, toda vez que en la
etapa de selección óptima de conductores se calcularon los flujos de potencia, por lo es
necesario reescribirla en función de los datos disponibles. Para ello se utiliza el hecho que
la potencia compleja es el resultado del voltaje por el conjugado de la corriente, entonces
desarrollando y despejando la potencia activa y reactiva se tiene:
Pi + jQi = (VA(i ) R + jVA(i ) I ) ⋅ ( I iR + jI iI )
(4.18)
Pi = VA(i ) R I iR + VA( i ) I I iI
Qi = VA( i ) I I iR − VA( i ) R I iI
Reemplazando (4.18) en (4.17) y notando que |Ii|2=|Si|2 / |VA(i)|2, finalmente la expresión
para el voltaje es:
Vi
2
2
= V A(i ) +
(P
i
2
+ Qi2
V A(i )
2
) ⋅ (r
i
2
)
+ xi2 − 2 ⋅ (ri ⋅ Pi + xi ⋅ Qi )
(4.19)
En virtud de la relación (4.17), es posible calcular la magnitud del voltaje en cualquier
nodo, siempre y cuando se conozca el voltaje en el nodo aguas arriba (nodo padre). Como
el único voltaje que se conoce a priori es el voltaje en el transformador (nodo raíz) y los
parámetros de flujo de potencia y impedancias del conductor ya fueron calculados en la
etapa previa, sólo basta con recorrer la red aguas abajo del transformador de manera de ir
progresivamente calculando todos los voltajes. Sin perjuicio de lo anterior la relación
señalada puede ser simplificada, dado que en ella el término cuadrático que depende de los
parámetros de la línea es marginal con respecto al término lineal, razón por la cual también
se puede despreciar, entonces la expresión implementada en el presente trabajo para el
cálculo del voltaje en los nodos es:
65
Vi
2
2
= V A(i ) − 2 ⋅ (ri ⋅ Pi + xi ⋅ Qi )
(4.20)
Al conocer el voltaje en los nodos, se pueden calcular las pérdidas de potencia activa de
acuerdo a la ecuación (4.13). Si durante todas las horas del año se tuviese la misma
demanda, bastaría con multiplicar las pérdidas, obtenidas a partir de (4.13), por 8760
horas25 y así obtener las pérdidas de energía para un determinado año, sin embargo tal
situación no ocurre, puesto que el cálculo de pérdidas se realiza para el escenario de
demanda máxima coincidente de cada red. Para incorporar esta situación y dado que es
imposible realizar un cálculo para cada punto de demanda de la curva de carga, se opta por
aproximar las pérdidas de energía mediante las pérdidas medias de energía. Para lo cual se
considerarán las siguientes definiciones:
•
Factor de carga, Fc, es la relación entre la potencia media de la curva de carga y la
potencia máxima, también denominada potencia punta. En (4.21) E es la cantidad
de energía consumida en el período T.
E
Pmedia
FC =
= T
Ppunta Ppunta
•
(4.21)
Factor de carga de las pérdidas, Fp, es la relación entre las pérdidas medias de
energía y las pérdidas de potencia en el escenario de mayor demanda (potencia de
punta).
FP =
Lmedia
Lpunta
(4.22)
De esta forma las pérdidas medias de potencia serán FpLpunta, situación que hace necesario
estimar Fp, siendo interesante destacar la relación existente entre el factor de carga de las
pérdidas con el factor de carga26, dada por:
Fc2 < Fp < Fc
(4.23)
En virtud que en este trabajo el factor de carga se supone conocido y depende del número
de consumos de la red, ecuación (4.3), bastaría entonces determinar la relación que permita
25
Número de horas de un año de 365 días
66
calcular el factor de carga de las pérdidas a partir del factor de carga. Dicha relación a
buscar no es genérica, producto que depende de la curva de carga de los consumos a
suministrar, no obstante, existen investigaciones en que se analizan diferentes curvas de
carga para obtener ecuaciones que reflejen en forma aproximada el comportamiento común
de tales factores (Buller y Woodrow 1928, Gustafson y Baylor 1988, Gustafson y Baylor,
1989). En particular, en esta investigación se utiliza una de las aproximaciones propuestas
por Gustafson y Baylor (1988), dada por:
FP = 0.08 ⋅ FC + 0.92 ⋅ FC2
(4.24)
Con lo que las pérdidas medias de energía el tramo i, Lenergía,i, serían:
(4.25)
LENERGÍAi = 8760 ⋅ FP ⋅ LACTIVASi
Como las pérdidas de energía representan energía que no se vende, pero que igualmente es
comprada por la distribuidora al generador, estas deben ser valorizadas al precio de venta
de energía del generador al distribuidor, el cual se consideró en 18,4527 $/kWh (Synex,
2004). Si además se considera que existe un crecimiento de la demanda, y por tanto
pérdidas distintas para cada uno de los años del horizonte de estudio, lo que implica costos
distintos a través del período, no es posible sumar tales costos de manera directa, sino que
se debe utilizar el método de valor actual neto, con lo que el costo de las pérdidas de
energía es:
N
T
CPÉRDIDAS = CENERGÍA ⋅ ∑∑
i =1 j =1
LENERGÍA,i ,0 ⋅ (1 + g )
(1 + r )
j
j
(4.26)
Donde
26
•
CPÉRDIDAS
: costo total de las pérdidas de la red para todo el horizonte.
•
CENERGÍA
: costo unitario de energía.
•
N
: número de tramos de la red.
•
T
: número de años del horizonte de evaluación
Para un desarrollo completo de la relación entre el factor de carga y el factor de carga de las pérdidas véase
Gonen (1986) páginas 52-61.
27
Valor calculado a partir de los precios de nudo y estructura de recargos vigentes el 31 de diciembre de
2003.
67
•
g
: tasa anual de crecimiento de las pérdidas.
•
t
: tasa de descuento anual.
4.3.6
Iteraciones y resultados
En virtud de las etapas anteriores es posible obtener el costo de los transformadores, el
costo de los conductores empleados en el trazado óptimo y el costo de las pérdidas para
cada isla perteneciente a una mini-zona. Sea entonces el costo total de una isla a planificar:
j
CT j ,i = ∑ ( Ctrafok ,i + Cred k ,i + Cpérdidask ,i )
(4.27)
k =1
Con
•
CTj,i
: costo total de j redes óptimas en la isla i.
•
Ctafok,i
: costo del k-ésimo trasformador ubicado óptimamente en la isla i.
•
Credk,j
: costo de la red óptima asociada al transformador k en la isla i.
•
Cpérdidask,i
: costo de las perdidas de la red óptima asociada al
transformador k en la isla i.
Considerando la ecuación 4.27 y producto que ya se conocen las distintas etapas que
intervienen en el proceso de micro-optimización es posible clarificar con más detalle el
algoritmo usado para encontrar las redes óptimas sobre una isla perteneciente a una minizona determinada.
Se inicializa el contador en 0.
1. Si la carga puede ser suministrada por un único transformador (T=1) se ubica el
transformador en el centro de carga, en caso contrario se inicializa el algoritmo en el
paso 4.
2. Para dicha posición se calcula CT, siendo necesario calcular:
2.1 Ctrafo, a través de la asignación de capacidad
2.2 Cred, a partir del trazado óptimo y selección óptima de conductores.
68
2.2.1
En caso de realizar el equilibrio de red, se recalcula el tamaño del
transformador.
2.3 Cpérdidas, mediante el cálculo de las pérdidas de energía
3. Se almacenan las variables relevantes que dieron origen a CT, ubicación, tamaño y
costo del transformador, trazado de la red, conexiones y conductores usados con sus
respectivos costos y costos de pérdidas de cada red. Al costo de red se le incorpora
un costo relacionado con los postes que se deben usar.
4. Se realiza la ubicación de (T+1) transformadores, utilizando el método de k-means.
5. Se repite el paso 2 para cada posición obteniéndose CT para el conjunto de
configuraciones de la isla.
6. Se realiza 3 siempre y cuando el costo total de la presente iteración sea menor al de
la iteración anterior.
7. El contador se aumenta en una unidad. Se repite 4-5-6 hasta que el CT de la
iteración actual es mayor que el CT de la iteración anterior, encontrándose un valle
en la función objetivo y por tanto determinando un mínimo en la función.
8. Se repite el paso 7 hasta que el contador llega a un número máximo, dicho número
representa el número de iteraciones adicionales que se realizan luego de encontrado
el primer mínimo de manera de ampliar el espacio de búsqueda. Finalmente se
escoge la alternativa que representa un menor costo28.
A continuación se analizarán algunos resultados para comprender con mayor detalle el
algoritmo propuesto:
Relevancia de la búsqueda
Nótese que si el número máximo, denominado búsqueda, es igual a uno, significa entregar
como solución óptima para la isla el primer mínimo que se encuentra, es decir, determina el
número de transformadores y redes asociadas cuyo costo es menor que el que provoca la
adición de un nuevo transformador con su respectiva red. Si la búsqueda es mayor que uno,
28
Un ejemplo completo del algoritmo de micro-optimización se encuentra en el anexo E
69
implica seguir buscando en el espacio de las soluciones durante (búsqueda-uno) iteraciones
extras, para finalmente quedarse con el menor de los costos obtenidos.
No obstante, en el procedimiento implementado finalmente se utiliza un alcance de uno,
esto se basa en el hecho que tras encontrar un mínimo, la incorporación de un
transformador adicional aumenta los costos por unidad de capacidad debido a las
economías de escala29 que existen en estos elementos y al aumento de capacidad instalada
que necesariamente se produce. Por ejemplo, si para una determinada isla se encuentra que
el mínimo local se logra con un transformador de tamaño M que abaste un conjunto de C
clientes con un consumo de energía E, un factor de carga Fc(C) y una demanda de potencia
P, si luego se ubica un nuevo transformador los clientes y la energía asociada se reparte
entre dos elementos y por tanto se cumple que:
C = C1 + C2
(4.28)
E = E1 + E2
(4.29)
Sin embargo, la potencia total que se debe suministrar es mayor que P, dado que tanto C1
como C2 son menores que C, y como el factor de carga disminuye con el descenso del
número de clientes, los factores de carga de C1 y C2 son menores que el factor de carga de
C, cumpliéndose que:
E1
E1
1
1
T
T
Fc(C ) > Fc(C1 ) ⇒
>
⇒
>
Fc(C1 ) Fc(C )
Fc(C1 ) Fc(C )
(4.30)
E2
E2
1
1
T
T
Fc(C ) > Fc(C2 ) ⇒
>
⇒
>
Fc(C2 ) Fc(C )
Fc(C2 ) Fc(C )
(4.31)
Sumando (4.31) y (4.32) se tiene:
E2
( E1 + E2 )
E1
E2
E
T +
T >
T ⇔
T +
T >
T
Fc(C1 ) Fc(C2 )
Fc(C )
Fc(C1 ) Fc(C2 ) Fc(C )
E1
(4.32)
Reemplazado de acuerdo a (4.21), entonces:
29
En el caso de los transformadores el costo por unidad de capacidad ($/kVA) disminuye en la medida que
aumenta el tamaño (capacidad) del transformador.
70
(4.33)
P1 + P2 > P
Por lo cual los transformadores deberán satisfacer una potencia de diseño mayor,
introduciendo un delta de costo adicional que se ve incrementado producto de las
economías de escala presentes en transformación, con lo que la suma del costo de ambas
unidades será mayor que el costo del transformador M. Costo que probablemente no se
alcance a justificar con la posible disminución en costos de redes, toda vez que se conoce
que en la siguiente iteración luego del mínimo, el costo total va en aumento. También se
debe
destacar
que
iteraciones
adicionales
representan
incrementos
en
costos
computacionales y por ende mayores tiempos de ejecución, lo que constituye un problema
cuando la dimensionalidad de la zona a optimizar aumenta.
En la tabla 4.4 se muestra el costo total de la red y el tiempo para distintos valores de
búsqueda, aplicados a la zona de análisis dada por la comuna de Macul.
Tabla 4.4: Variación del costo total con la búsqueda
Búsqueda Costo Total ($) Tiempo (min)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
1.836.355.360
1.833.496.191
1.831.117.948
1.851.841.019
1.820.760.267
1.826.747.204
1.834.920.708
1.827.443.448
1.839.715.440
1.831.849.273
1.823.315.893
1.831.028.015
1.823.774.388
1.830.555.495
1.836.080.005
3,6
3,9
4,3
5,0
5,3
5,7
6,7
7,2
7,6
8,7
9,3
10,3
11,5
12,6
13,7
Donde es posible ratificar el hecho que incrementos en la búsqueda aumentan
considerablemente los tiempos de ejecución, sin implicar disminuciones apreciables en los
costos totales de la red, en efecto, el costo promedio de la tabla anterior es de
71
$ 1.831.933.377, con una desviación estándar de $ 7.658.349 que representa sólo un 0,42 %
del costo promedio total, lo que no implica diferencias significativas entre los datos, siendo
las diferencias en costo atribuibles a la característica no determinística de la metodología
propuesta30. Todo lo cual ratifica la decisión de realizar el diseño de la red en consideración
del primer mínimo encontrado en el proceso de optimización31.
Efecto del equilibrio de red
Tal como ya se señaló, el equilibrio de red consiste en mover el transformador a un punto
tal que los flujos que salen por ambos extremos sean lo mas parecidos posibles, de manera
de incorporar indirectamente en el trazado de red, realizado en base a distancia, el flujo
circulante por cada conductor y así evitar que por un extremo del transformador se alimente
a gran parte de la red mientras que por la otra se abastezca una pequeña parte de ella, lo que
trae como resultado mover más energía por un lado transformador lo que implica secciones
mayores durante gran parte del trazado y por ende mayores costos. No obstante, se debe
recordar que la posición del transformador a partir de la cual se traza la red, no es realizada
arbitrariamente sino que a través de un proceso de cluster en que la posición esta dada por
el centro de carga del conjunto de consumos asociados a él, por lo que, en principio la red
debiese encontrarse equilibrada, pero dada la presencia de calles, que restringen el trazado
de ella, el punto de equilibrio de la configuración de baja tensión puede modificarse,
apareciendo entonces la necesidad de encontrarlo. Para conocer si la incorporación del
equilibrio de red, provoca mejoras a la optimización de la red, se analizan tres casos:
•
Caso 1, sin equilibrio, en este no se realiza la reubicación de los transformadores a
través del equilibrio de red.
•
Caso 2, con equilibrio en la etapa final, en que el equilibrio no se realiza en cada
iteración del algoritmo (sin el paso 2.2.1) sino que únicamente se equilibran y
recalculan costos una vez que se ha elegido la mejor configuración para la isla.
30
Para una mejor comprensión revisar el anexo referido a complejidad Algorítmica y el apartado de
Convergencia del presente capítulo.
31
En el anexo F se presentan, a modo de ejemplo, los resultados para algunas mini-zonas, notando en ellos el
comportamiento creciente del costo total con la adición de un nuevo transformador, luego de haber
encontrado el mínimo.
72
•
Caso 3, con equilibrio, se realiza el algoritmo señalado, incorporando en cada
iteración el equilibrio de la red.
Para los tres casos en cuestión se realizaron 20 ejecuciones del algoritmo32, denominadas
lanzamientos, obteniéndose los siguientes costos y tiempos de ejecución promedios:
Tabla 4.5: Efecto del equilibrio de red
Costo Total
($)
1.906.194.901
1.833.157.697
1.820.926.206
Caso 1
Caso 2
Caso 3
Tiempo
(min)
3,05
3,56
6,55
Se observa que la inclusión del equilibrio de red implica reducciones de costo promedio de
73 y 85 millones de pesos en el caso 2 y 3 respectivamente, tal relación de ahorro se
encuentra presente en todos los lanzamientos ejecutados, situación que se puede apreciar en
la figura 4.10.
MM ($)
1.940
1.920
1.900
1.880
1.860
1.840
1.820
1.800
1.780
1.760
1.740
1
2
3
4
5
6
7
8
9
10 11 12 13 14 15 16 17 18 19 20
Lanzamientos
Caso 1
Caso 2
Caso 3
Figura 4.10: Efecto de la inclusión del equilibrio en la optimización
32
El resumen de las ejecuciones del algoritmo se encuentran en el Anexo G.
73
Es posible constatar además, que el tiempo de ejecución del caso 3, es el doble que el
tiempo de ejecución del caso 1, con un ahorro en costo de 4,47 %, en tanto que el tiempo de
ejecución del caso 2 es tan sólo un 16 % superior al caso en que no se realiza equilibrio,
pero con un ahorro comparable al caso 3 de 3,98 %, razón por la cual, en beneficio de la
eficiente ejecución del algoritmo con miras a su aplicación en un zona de mayor tamaño
como Santiago, se opta por incluir el equilibrio de red sólo en la etapa final, dado que
presenta ahorros importantes en un tiempo de ejecución menor.
Convergencia
Cabe recordar que el problema a resolver de acuerdo a su complejidad algorítmica
corresponde a un problema del tipo NP-completo, y por tanto la solución aquí propuesta no
es capaz de resolver el problema mediante un algoritmo determinístico, entendiéndolo
básicamente como aquel que entrega la misma la solución cada vez que es ejecutado. En
cambio, lo hace a través de un procedimiento con una parte no determinística, en particular
la componente no determinística del algoritmo propuesto se presenta en la formación de los
cluster para la ubicación de los transformadores. De hecho, en el apartado referente a tal
tema, fue posible constatar la distorsión que se produce en k-means para distintos
lanzamientos, distorsión que era similar, pero no igual, por lo que se tomó como decisión
dejar como ubicación el resultado que presentará menor distorsión al ejecutarse tres veces
el procedimiento de cluster, para un número determinado de transformadores. En efecto,
producto de dicha componente no determinística, los resultados de la optimización también
son distintos cada vez que se ejecuta el procedimiento, lo que en apariencia podría restarle
confiabilidad, pero ¿Qué tan distintos son los costos para cada lanzamiento?, en la tabla 4.6
se presentan los resultados para 20 ejecuciones de la metodología. En ella es posible
apreciar la similitud tanto en tiempo de ejecución como en costo total entre los distintos
lanzamientos o ejecuciones de la metodología propuesta, de donde se obtiene un costo total
promedio de $ 1.833.157.697 y un tiempo de ejecución promedio de 3,52 minutos, con
desviaciones estándar de $ 7.095.766 y 0,07 minutos. Es importante señalar que la
desviación estándar de los costos representa tan solo el 0,39 % del costo promedio total.
Notando entonces, por un lado la naturaleza no-determinística del algoritmo, al observar
74
resultados distintos en cada ejecución, y por otro la pequeña dispersión de sus resultados,
permitiendo la toma de decisiones a través de ellos.
Tabla 4.6: Confiabilidad del algoritmo
Lanzamiento
Costo Total ($)
Tiempo (min)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1.829.211.042
1.828.334.867
1.832.120.157
1.833.232.594
1.843.371.158
1.820.042.332
1.831.159.158
1.835.060.121
1.838.797.878
1.840.474.314
1.820.073.227
1.839.395.779
1.837.076.387
1.839.113.483
1.827.007.437
1.833.870.373
1.831.409.165
1.837.760.035
1.838.682.217
1.836.962.215
3,62
3,57
3,52
3,52
3,62
3,59
3,54
3,56
3,43
3,54
3,43
3,59
3,47
3,42
3,41
3,54
3,46
3,68
3,47
3,57
Tamaño de la mini-zona
Este apartado tiene como objetivo estudiar el algoritmo propuesto, determinando el tamaño
de división que minimiza los costos, para así posteriormente utilizar dicho tamaño en la
optimización de Santiago. Por tanto se ejecuta el procedimiento considerando diferentes
tamaños posibles de mini-zonas.
Al realizar tal ejercicio se obtiene como resultado el gráfico presentado en la figura 4.10,
que muestra que para zonas de pequeño tamaño, inferiores a 200 x 200, tanto los tiempos
de ejecución como los costos totales son mayores que el resto de los casos, esto se debe a
que en mini-zonas pequeñas hay más posibilidades de instalar transformadores de menor
tamaño dado que se abastece un menor número de consumos, y producto de las economías
de escala en la capacidad de transformación se presentan mayores costos. Los tiempos
75
mayores se explican debido a que la zona a optimizar debe ser dividida en un mayor
número de mini-zonas, con lo que el procedimiento debe ser ejecutado en más
oportunidades. A partir de las mini-zonas de 300 x 300 se observa un comportamiento
bastante constante del costo total y un aumento progresivo en los tiempos de ejecución. El
tiempo adicional se produce debido a que se aumenta el espacio de soluciones factibles al
aumentarse el número de nodos de una determinada mini-zona, con lo que el algoritmo
tarda más tiempo en encontrar el óptimo que se mantiene sin grandes variaciones
mostrando la calidad del mismo. Los menores tiempos33 se producen cuando la división es
de 300 y 400 metros, en tanto que los menores costos se producen cuando la división es de
500 y 600 metros, presentando el mejor balance entre tiempo de ejecución y calidad de la
solución la división en zonas de 500 metros, puesto que permite abarcar una zona mayor
que las divisiones más rápidas y por ende manejar un universo de soluciones factibles
mayor en un tiempo ligeramente superior.
6.000
18
16
14
4.000
12
10
3.000
8
2.000
6
4
1.000
2
-
0
50
80
100
200
300
400
500
600
700
800
900 1000 1100 1200 1300
Tamaño de la mini-zona
Costo Total
Tiempo
Figura 4.11: Costo y tiempo total v/s tamaño de la mini-zona
33
Los datos de tiempo y costo para cada tamaño de división se encuentran en el Anexo G.
Tiempo (min)
Costo (MM$)
5.000
76
5.
PROCESO DE MACRO-OPTIMIZACION
En el capítulo 4 se realizó la optimización de cada una de las mini-zonas en que fue
dividida la región a planificar, sin embargo tal procedimiento constituye meramente una
buena aproximación a la solución del problema, dado que la división de la región es
arbitraria y responde sólo a una partición regular de la misma, dejando la posibilidad
abierta a que consumos pertenecientes a una mini-zona determinada pudiesen ser asignados
y por ende alimentados desde otra mini-zona aledaña a un menor costo. Para incorporar
este efecto y reconociendo que la solución puede ser mejorada, en este capítulo se aborda
globalmente el problema, en base a los resultados de la micro-optimización, sin olvidar que
debido a la dimensionalidad del mismo, su solución fue sólo posible gracias a la partición
de él. Por tanto la mirada global, apunta necesariamente a emplear el proceso de microoptimización como base de la solución.
En línea con lo anterior en este capítulo se proponen y desarrollan tres alternativas para
mejorar la solución encontrada, la primera se basa en los diagramas de Voronoi y busca la
creación de zonas irregulares a las cuales aplicarles el proceso de micro-optimización, de
tal forma que se garantice que cada consumo quede asociado con sus vecinos cercanos, la
segunda consiste en analizar si es más económico reemplazar redes vecinas por una única
red que satisfaga dichos consumos, procedimiento que es efectuado mediante enumeración
completa cuando la zona es pequeña y mediante búsqueda tabú cuando la dimensionalidad
del problema hace imposible la revisión de todas las combinaciones factibles. Finalmente,
la tercera es la aplicación secuencial de las dos anteriores.
5.1
Macro-Optimización Vía Diagramas de Voronoi
Para comprender la metodología propuesta se expone primero una breve reseña referente a
la definición y propiedades básicas de los diagramas de Voronoi, para posteriormente
explicar en detalle el procedimiento empleado, mostrando nuevamente su aplicación
práctica para la comuna de Macul.
77
5.1.1
Diagramas de Voronoi
El concepto básico de los diagramas de Voronoi, dice relación con conocer la influencia
que realizan determinados elementos de un conjunto sobre el resto de los elementos del
mismo. La primera aproximación fue realizada en 1644 por Descartes, señalando que el
sistema solar consistía en vórtices, donde la materia giraba en torno a la estrella más
cercana, situación que producía polígonos convexos para cada área de influencia de las
estrellas. No obstante, fue hasta Dirichlet (1850) y Georgy Voronoi (1908), cuando se
formalizó el concepto, el cual además, con distinto nombre ha sido aplicado a varias ramas
de la ciencia, tales como geología, meteorología, denominándose polígonos de Theissen, y
en física y química conociéndose como regiones de Wigner-Seitz.
Conceptualmente un diagrama de Voronoi es el resultado de asociar todas las ubicaciones
del espacio euclidiano con el más cercano de los p puntos, del mismo espacio, elegidos
como centros. En términos matemáticos, sea P un conjunto de n puntos distintos en el
espacio euclidiano {p1,…, pi,..., pn}, denominados puntos generadores, un punto x del plano
pertenece al área de influencia del punto generador pi, denominada polígono de Voronoi,
Vi, si y solo si el punto x esta más cerca de pi que de cualquier otro punto generador. Esto
es:
{
}
Vi = x / x − pi < x − p j ,∀ j ≠ i
(5.1)
Por tanto, el diagrama de Voronoi representa al conjunto de todos los polígonos de Voronoi
{V1,…, Vi, ..., VN} del espacio euclidiano provocados por los puntos generadores {p1,…,
pi,..., pn} respectivamente.
78
[y]
9
8
7
6
5
4
3
2
2
3
4
5
6
7
8
9
[x]
Figura 5.1: Diagrama de Voronoi para 30 centros
Entre sus definiciones y propiedades más importantes se cuentan:
1. Dos puntos generadores pi y pj son vecinos si comparten una arista. Una arista es la
bisectriz perpendicular del segmento que une pi con pj
2. Un vértice es un punto equidistante a tres generadores y es la intersección de tres
aristas.
3. Un polígono de Voronoi es convexo o no acotado.
4. Un polígono de Voronoi es no acotado si su punto generador pertenece a la
envolvente convexa del conjunto de puntos generadores.
5. Dentro del círculo con centro en un vértice de Voronoi y que pasa por tres puntos
generadores no puede existir ningún otro punto generador, y tal círculo constituye el
mayor de todos los círculos que puede construirse sin que contenga dentro a otro
generador distinto del tomado como centro del círculo.
6. Si se toma como centro de un círculo cualquier punto del plano y se traza una
circunferencia que pase por un solo punto generador, dicho punto es interior a una
región de Voronoi. Si toca exactamente a dos puntos generadores, separa
exactamente a dos regiones de Voronoi, por tanto pertenece a una arista. Si se puede
dibujar una circunferencia que toque a tres puntos generadores, es un vértice de
Voronoi.
79
Si bien este desarrollo, constituye una idea que formalmente va a cumplir un siglo, su
difícil implementación provocó que no se le brindara la atención merecida durante largo
tiempo. Sin embargo, en las últimas décadas, con el avance de la geometría computacional
ha tomado gran importancia, tanto en el campo de sus aplicaciones como en el campo de su
propio desarrollo algorítmico (Okabe et al, 1992).
Su aplicación inmediata se da en
problemas de distancia, tales como encontrar el vecino más cercano, encontrar todos los
vecinos más cercanos, encontrar el mayor círculo vacío, esto es, dado un generador p
encontrar el mayor círculo que no contiene ningún punto indeseado, o en el caso del menor
círculo, encontrar el menor círculo que agrupa a un conjunto de n puntos en el plano.
También se usa en cluster geométrico y en robótica, donde se aplica a la planificación del
movimiento (Yap, 1987). Además, se debe destacar el trabajo de Akabane Kenichi et al.
(2002), que utiliza esta metodología en la ubicación de centros de control de calidad de
potencia, en cuya ubicación intervienen variables eléctricas tales como la caída de tensión y
la demanda de corriente de cada consumo, convirtiendo a esta técnica en una atractiva
manera de afrontar la ubicación óptima de transformadores.
5.1.2
Procedimiento de optimización vía Voronoi
En consideración a la característica de asignación de los diagramas de Voronoi, es posible
plantear, como hipótesis, que si a cada transformador se le asignan los consumos más
cercanos se obtendrán menores costos. No obstante, la planificación desde cero toma en
cuenta únicamente la posición de los clientes y por ende la asignación a través de Voronoi
es inviable, dado que no existen los centros iniciales para trazarlos, situación resuelta a
través de la micro-optimización que proporciona la planificación de la red y como
subproducto la ubicación de los transformadores, surgiendo entonces las posibilidad de
utilizar tales ubicaciones como centros de los polígonos de Voronoi, y para cada uno de
ellos realizar el proceso de micro-optimización con el objeto de planificar la red. En suma,
se realiza el mismo procedimiento de micro-optimización que se describió en el capítulo 4
pero esta vez aplicado a zonas irregulares, de distinto tamaño y forma, dadas por los
80
polígonos de Voronoi. Entonces, el algoritmo del proceso de macro-optimización propuesto
es:
1. Realizar el proceso de micro-optimización de la zona a planificar, esto es dividir la
región en mini-zonas y optimizar cada una de ellas. Obteniendo la ubicación de los
transformadores de distribución.
2. Construir el diagrama de Voronoi utilizando como puntos generadores la ubicación
de los transformadores.
3. Para cada polígono de Voronoi realizar el proceso de micro-optimización.
Si bien los diagramas de Voronoi poseen una definición sencilla y fueron enunciados hace
gran data, su aplicación a modelos de gran tamaño no está resuelta del todo, al menos en lo
que se refiere al problema de asignación de consumos en las zonas no acotadas. De hecho
tal como se puede apreciar en la figura 5.2 el diagrama de Voronoi realiza algunos
polígonos cuyos vértices están fuera de la zona de análisis (fuera del rectángulo indicado en
la figura 5.2), entendiendo esta como la delimitada por los consumos de la zona de
planificación, y por polígonos que poseen un vértice ubicado en infinito (regiones no
acotadas), representando esto un problema a la hora de identificar que vértices de tramos de
calle y que consumos están incluidos en cada uno de ellos.
81
4
3.5
x 10
14000
[m]
[m]
3
Polígonos no
acotados
2.5
12000
10000
2
1.5
1
Polígonos con vértices
exteriores
8000
6000
0.5
0
4000
Polígonos interiores
-0.5
-1
0
1
2
3
4
[m]
5
4
x 10
3.2
3.4
3.6
3.8
4
[m]
4.2
4.4
4.6
4
x 10
Figura 5.2: Diagrama de Voronoi para la comuna de Macul
Para resolver tal inconveniente se propone una modificación al diagrama de Voronoi que
consiste en acotar las regiones que presentan vértices en infinito y alterar los polígonos que
presentan vértices fuera de la zona de análisis, de tal forma que todos los polígonos luego
de la modificación sean acotados y por ende posibilitar la correcta asignación de los
consumos.
En primer término se procede a ejecutar el trazado de Voronoi, obteniendo zonas acotadas
interiores, zonas acotadas con vértices exteriores y zonas no limitadas, permaneciendo las
primeras inalterables en el proceso de modificación, las que se encuentran identificadas en
la figura 5.3. Luego de lo cual se define un polígono regular denominado polígono frontera
(polígono trazado en 5.3), cuyo vértice inferior está dado por el menor valor de la
coordenada x e y de entre todos los consumos a satisfacer, y el vértice extremo por la mayor
coordenada x e y de los mismos consumos, tal polígono sirve de cota para las siguientes dos
etapas y representa la zona a planificar.
82
12000
11000
10000
[m]
9000
8000
7000
6000
3.5
3.6
3.7
3.8 [m]
3.9
4
4.1
4
x 10
Figura 5.3: Identificación zonas interiores diagrama de Voronoi
Modificación de zonas acotadas con vértices exteriores
De la figura 5.3 se desprende automáticamente que secciones del polígono frontera actúan
de aristas para las zonas de Voronoi que se desean acotar, y por ende el problema se
resuelve básicamente encontrando la intersección entre la arista del polígono frontera con la
recta que une el tramo que sale desde un vértice interior de la zona a limitar a un vértice
fuera de dicha zona, con lo que se obtiene un nuevo vértice del polígono, situación que se
repite para otro tramo, dado que el polígono es cerrado y convexo con lo que debe existir
una arista desde el exterior a la zona interior distinto al ya empleado, encontrando el otro
vértice que permite cerrar el polígono, y así eliminado todos aquellos vértices fuera de la
frontera. Atención especial reciben aquellos polígonos ubicados en las esquinas de la
frontera, cuyos tramos que salen de la zona lo hacen por distintas aristas de la frontera, y
por tanto encontrar sólo los vértices de intersección no resuelve la situación, ya que el
tramo que une tales puntos podría dejar fuera a consumos que sí pertenecen a la zona, para
evitarlo se incluye como vértice del nuevo polígono, el vértice del polígono frontera que se
encuentra en la esquina próxima, con lo que además de las dos aristas que se forman entre
los vértices interiores y las aristas de la frontera, se generan dos nuevas aristas entre tales
83
puntos de intersección y el nuevo vértice incluido. Se logra entonces, la correcta asignación
de todos los consumos.
12000
11000
[m]
10000
9000
8000
7000
6000
3.5
3.6
3.7
3.8
[m]
3.9
4
4.1
4
x 10
Figura 5.4: Identificación y cierre de polígonos con vértices exteriores
Cierre de las zonas no acotadas
Este procedimiento es parecido al anterior con la salvedad que es imposible trazar una recta
entre un punto interior y el punto ubicado en infinito, puesto que no tiene definida una
posición real en el plano cartesiano, requiriendo un paso adicional para conseguirlo, lo
primero que se realiza es reconocer cuales son aquellos polígonos que no están acotados
dado que la delimitación entre ellos es la que se presenta difusa. Es imposible determinar la
pertenencia cuando el límite es una arista imaginaria que va desde un vértice que existe a
otro que no. Se debe notar además que los polígonos de Voronoi no acotados, en algún
segmento ya sea dentro de la zona a planificar o fuera de ella, son vecinos de otro polígono
de Voronoi no acotado, por lo que la separación entre ellos es fundamental para la correcta
asignación de pertenencia.
Tal límite entre zonas se establece teniendo presente que cada polígono, creado a partir de
las zonas no acotadas, debe agrupar a los puntos más cercanos a sus determinados centros,
dado en este trabajo por la ubicación de los transformadores. Siendo el desafío la definición
84
de la separación que cumpla tal objetivo. Si se tuviesen sólo dos centros generadores, el
límite entre ambos vendría dado únicamente por una recta perpendicular al tramo que los
une, pero la existencia de más centros generadores hace que el trazado de Voronoi se
complique, complejidad que aumenta con el número de centros. Sin embargo,
como la
asignación conflictiva depende únicamente de ambos polígonos y los demás polígonos de
Voronoi ya se encuentran trazados, es posible utilizar tal metodología pero considerando
los ya construidos, lo que se resume a continuación:
1. Se identifican los centros generadores de los polígonos no acotados, lo cuales se
consiguen generando la envolvente convexa34 de todos los centros generadores
(ubicaciones de todos los transformadores), ya que en ella, sus vértices coinciden
con los centros de las zonas no acotadas, y por tanto dos vértices consecutivos de la
envolvente convexa señalan dos zonas no acotadas que en alguna parte del espacio
presentan una arista común que debe ser definida.
34
Un punto x ∈ Rn es combinación convexa de los puntos x1, …, xm ∈ Rn si existe α1, …, αn ∈ R, tal que
m
x = α1 x1 + α 2 x2 + ... + α m xm
con
∑α
i
= 1, α i ≥ 0 ∀i = 1,..., m
i =1
La envolvente convexa de un conjunto A, es el conjunto de todas las combinaciones convexas de puntos de A
m
m
Envolvente = z ∈ R n , z = ∑ α i xi , ∑ α i = 1, xi ∈ A, α i ≥ 0 ∀i = 1,..., m
i =1
i =1
85
11500
11000
10500
10000
9500
9000
[m]
8500
8000
7500
7000
3.6
3.7
3.8
[m]
3.9
4
4.1
4
x 10
Figura 5.5: Envolvente convexa de los centros generadores
2. En cada segmento, dado por la unión de dos vértices consecutivos de la envolvente
convexa, se identifica la recta perpendicular al punto medio de dicho segmento, lo
que divide al plano en dos partes. Tal recta pasa por el vértice común de los
polígonos no acotados, y por tanto la nueva arista va desde dicho vértice común al
punto de intersección entre la recta y la correspondiente arista del polígono frontera,
siempre y cuando el vértice común sea interior a la zona de planificación.
3. Con las nuevas aristas formadas más las aristas creadas en la etapa anterior, se
cierran los polígonos no acotados, teniendo nuevamente atención con lo que sucede
en los polígonos ubicados en las esquinas de la frontera. Básicamente en cada
polígono se toma la sucesión de vértices interiores, y aquellos vértices que
coinciden con aristas ya trazadas, a través de la envolvente convexa o del
acotamiento de polígonos con vértices reales exteriores, se unen a los nuevos
vértices dados por el fin de la arista (intersección de la arista con el polígono
frontera), de manera de cerrar el polígono y eliminar los vértices del polígono
exteriores a la zona de planificación.
86
Resultados del procedimiento vía Voronoi
Con los procedimientos anteriores es posible acotar en forma determinística cada uno de los
polígonos, permitiendo la asignación unívoca entre consumos y transformadores, en virtud
de lo cual, cada uno de los polígonos de Voronoi puede representar una mini-zona a
optimizar, conteniendo un conjunto de cargas y un trazado vial determinado.
A modo de ejemplo, se considera como caso base, la ubicación de 284 transformadores con
una capacidad total de 54 MVA, obtenidos a partir del proceso de micro-optimización,
cuyo costo total, incluida la red y las pérdidas, es de $1.837.274.567, se tiene el siguiente
diagrama de Voronoi para la comuna de Macul.
11500
11000
10500
10000
[m] 9500
9000
8500
8000
7500
7000
3.6
3.7
3.8 [m] 3.9
4
4.1
4
x 10
Figura 5.6: Diagrama de Voronoi para una solución de la micro-optimización
Es posible apreciar que la zona de planificación queda dividida en mini-zonas irregulares, y
cada una de ellas representa una agrupación de consumos cercanos. Una vez que se tiene la
nueva asignación de consumos a cada zona, se procede a realizar la misma metodología
expuesta en el capítulo 4, con el fin disminuir los costos encontrados con dicho
procedimiento. Sin embargo, en un primer análisis, esto no sucede tan claramente,
87
obteniéndose un costo de $ 1.832.819.289, ligeramente inferior al caso base, para 375
transformadores y redes con una capacidad instalada de 54 MVA. Es decir, aparecen más
transformadores cuya capacidad promedio es menor, ello debido a que las nuevas minizonas son en promedio más pequeñas que las zonas de 500 x 500 utilizadas en la microoptimización, con lo cual nace la pregunta ¿qué sucede si se aumenta la dimensionalidad de
los polígonos irregulares?. Para responder esta interrogante, se requiere en primer término
aumentar el tamaño de los polígonos de Voronoi sin perder la información obtenida desde
la micro-optimización, vale decir, sin desconocer que la ubicación de los transformadores
obtenidos corresponden a una correcta relación entre capacidad de transformación, redes y
consumos abastecidos, por lo cual se propone que los puntos generadores del diagrama de
Voronoi sean sólo algunas de las ubicaciones determinadas en el proceso previo. Tales
ubicaciones corresponden a la de todos los transformadores que son superiores a una
determinada cota, entre mayor es la cota menor es el número de transformadores que
satisfacen la restricción y por tanto es menor el número de puntos generadores, lo que
determina polígonos de Voronoi de mayor tamaño. En la tabla 5.1 se presenta el resultado
de aplicar la metodología propuesta para distintos valores de cota y por tanto para distinto
número de polígonos.
Tabla 5.1: Aplicación diagrama de Voronoi
Cota (kVA)
Número de
Polígonos
10
15
30
45
75
100
150
300
500
252
238
228
221
211
203
183
100
15
Costo Total ($)
1.832.819.289
1.825.087.305
1.822.069.744
1.815.174.431
1.804.476.363
1.789.638.270
1.773.583.766
1.765.329.035
2.366.757.645
Número de
Trafos
375
363
356
354
336
331
301
229
113
Capacidad
Instalada
(MVA)
54,33
54,40
54,06
53,86
53,22
52,86
52,50
47,48
41,16
Tiempo
(min)
3,19
3,09
3,10
3,08
2,93
3,03
2,90
3,22
21,24
Se puede observar que en la medida que aumenta el tamaño de la cota y por ende el tamaño
de los polígonos, se produce un mayor ahorro con respecto al caso base, en el caso en que
88
la cota es de 500 kVA sólo existen 15 polígonos y por ende la zona que cubre cada uno de
ellos es mayor, lo que trae consigo mayores tiempo de ejecución y un empeoramiento de la
solución al incrementarse los costos relacionados con las pérdidas. Los mayores ahorros en
el caso analizado se producen tomando como cota 300 kVA y son en promedio del orden de
4 %.
11500
11000
10500
10000
9500
[m]
9000
8500
8000
7500
7000
3.7
3.8 [m]
3.9
4
4
x 10
Figura 5.7: Diagrama de Voronoi generado por transformadores de 300 kVA
Caso simplificado
Si bien se pudo constatar que la división adecuada en polígonos regulares incluye ahorros al
proceso de micro-optimización, se tiene que los tiempos de ejecución aumentan
considerablemente, ya que en total se realizan dos procesos de micro-optimización más la
generación del diagrama de Voronoi, por lo que el proceso completo al menos duplica los
tiempos de ejecución, situación relevante si se busca aplicar la metodología completa a una
zona de mayor tamaño, en donde duplicar el tiempo puede significar llegar a las 10 horas
de proceso, restándole efectividad a la metodología global. Para soslayar este problema e
incorporar el hecho que el uso del diagrama de Voronoi produce mejoras en la solución se
89
propone realizar una primera ubicación aproximada de los transformadores, de manera de
evitar la primera etapa de micro-optimización, y trazar el diagrama de Voronoi para la cota
adecuada de la nueva configuración y luego aplicar el proceso no simplificado a las nuevas
zonas irregulares.
El procedimiento simplificado consiste en no determinar la influencia de la red ni de la
conectividad de la red vial en la asignación del número de transformadores y de la
capacidad de los mismos, sino que únicamente tomar en cuenta la cantidad de consumo a
abastecer, la potencia de diseño necesaria y la capacidad de los transformadores disponibles
para abastecer dicha demanda. El algoritmo simplificado queda dado por:
1. Se divide la zona de planificación en zonas regulares de 500 x 500 metros.
2. Para cada mini-zona:
2.1 Se calcula la potencia de diseño de la mini-zona bajo el supuesto que es
suministrada por un único transformador.
2.2 Para la potencia de diseño se asigna el menor transformador que es capaz
de suministrarla (tomando en consideración el crecimiento de la
demanda). Si no existe un transformador dentro del dominio factible que
es capaz de hacerlo, se asigna el de mayor capacidad. Se define como
demanda no satisfecha el delta entre la potencia de diseño y la capacidad
del transformador instalado.
2.3 Si la demanda no satisfecha es cero se pasa a 3, en caso contrario se pasa
a 2.2, definiendo al potencia de diseño como la demanda no satisfecha.
3. Una vez que se conoce el número de transformadores esos son ubicados a través
del mismo algoritmo de cluster utilizado en el capítulo 4, por lo que la ubicación
queda dada por el centro de carga de los consumos asociados a cada cluster.
4. Para cada cluster se calcula la potencia de diseño y se asigna el transformador
óptimo correspondiente.
Con esta metodología se obtiene una ubicación preliminar de los transformadores en tan
sólo 10 segundos, la que si bien no corresponde a una ubicación necesariamente factible
90
dado que no se está considerando el costo de las redes y la conectividad vial, si incorpora
una primera aproximación a la agrupación de los consumos a través de los clusters
formados, y así se consiguen puntos generadores en forma rápida que incluyen la
información acerca de los centros de carga. Al realizar el mismo procedimiento que en el
apartado anterior, dejando como puntos generadores a los mayores a una determinada cota,
se obtienen los resultados presentados en la tabla 5.2.
Tabla 5.2: Aplicación diagrama de Voronoi al caso simplificado
Cota (kVA)
Número de
Polígonos
10
15
30
45
75
100
150
300
500
102
101
99
99
97
97
97
88
68
Costo Total ($)
1.760.168.472
1.760.628.472
1.755.170.145
1.758.860.082
1.764.630.418
1.763.638.774
1.757.196.385
1.780.345.629
1.764.515.664
Número de
Trafos
255
260
264
257
263
259
261
254
240
Capacidad
Instalada
(MVA)
48,48
48,56
48,16
48,11
48,40
48,13
48,20
47,35
47,68
Tiempo
(min)
2,86
2,84
2,87
2,84
2,86
2,85
2,85
3,00
3,53
Se aprecia que la variación del costo total producto de la elección de la cota es menor que
en el caso no simplificado, esto se debe que al no considerarse como restricción la
topología vial, no existen componentes conexas al interior de cada polígono que obliguen a
optimizar cada una de ellas de manera independiente, lo que necesariamente implica la
presencia de al menos un transformador por cada componente conexa o isla vial que se
produce, llevando esto a un mayor número de transformadores de menor tamaño. Como en
este caso tal situación no ocurre, el transformador a utilizar siempre será el que pueda
abastecer mayor cantidad de carga, dado que por economías de escala es lo que conviene, y
por tanto el número de tafos pequeños es menor, con lo que para las distintas cotas el
número de puntos generadores no varía considerablemente, manteniéndose nuevamente
ahorros del orden de 4 %. Es decir, el procedimiento simplificado no altera la calidad de la
solución y mejora los tiempos de ejecución al eliminar la necesidad de realizar dos veces el
proceso de micro-optimización.
91
5.2
Macro-Optimización Vía Búsqueda Tabú
En la metodología desarrollada, explicada en extenso en el capítulo 4, se sostiene que la
optimización de una red de baja tensión de gran tamaño, se puede llevar a cabo con buenos
resultados y en un tiempo razonable si la región a planificar se divide en regiones de menor
dimensión, denominadas en este trabajo mini-zonas, donde en cada una de ellas, se realiza
el proceso de micro-optimización de manera independiente, teniendo como ventaja
disminuir la dimensionalidad del problema y con ello los tiempos de ejecución, sin
embargo, como probable desventaja surge la posibilidad de pérdida de información, que se
produce al realizar la división de la zona a planificar,
tal pérdida no significa que
elementos desaparezcan o se eliminen, sino que se refiere a la ceguera del algoritmo frente
a cercanías y relaciones entre elementos que pertenecen a distintas mini-zonas vecinas.
La figura 5.8 es un acercamiento a la división planteada en la figura 4.1, donde se puede
apreciar que no necesariamente el mejor resultado se obtendrá de la división en mini-zonas,
de hecho los consumos de la mini-zona 4 podrían ser repartidos entre las mini-zonas 2 y 3 y
eventualmente presentar un menor costo global.
1
8800
2
1
8700
[m]
2
[m] 8650
8600
8600
8550
3
8400
8500
4
8200
8450
8400
8000
5
7800
3.88
3.9
3.92
[m]
3.94
3
8350
6
4
8300
3.96
4
x 10
3.9
3.91
3.92
3.93
[m]
Figura 5.8: Desventaja de la división en mini-zonas
3.94
3.95
4
x 10
92
Para poder incorporar el efecto positivo de la interrelación entre las distintas mini-zonas,
sin perder las ventajas de dividir el problema, se formula una metodología que luego de la
aplicación del proceso de micro-optimización, tiene como hipótesis, en base a lo señalado,
la posibilidad de mejorar la solución encontrada si se analizan las relaciones entre zonas
vecinas, mediante la búsqueda de ahorros al unir en una única red y por ende en un único
transformador redes vecinas alimentadas desde transformadores distintos. Por tanto, la
necesidad inmediata que surge, es realizar tales agrupaciones de la mejor forma posible con
atención a la naturaleza combinatoria del problema. De hecho, tal como se analizó en el
capítulo 3, si se buscan agrupaciones posibles entre 10 consumos, distribuidos
uniformemente en el plano se tienen del orden de 1000 casos, los que crecen en la medida
que aumenta el número de nodos a asociar, por ejemplo, si se tienen 200 ubicaciones
distribuidas uniformemente en el plano, es posible agruparlas en 1,60x106 (2200-1)
subconjuntos, no obstante muchos de ellos no tienen sentido práctico, producto que asocian
redes que no son vecinas entre sí.
Para lograr una buena aproximación a la vecindad entre redes y con esto a las
combinaciones posibles, se propone el uso de la triangulación de Delaunay, la que también
será utilizada para la recombinación de redes, por lo que a continuación se realiza una breve
descripción de esta metodología y su relación con los ya explicados polígonos de Voronoi.
5.2.1
Triangulación de Delaunay
Una triangulación, básicamente corresponde a una subdivisión de una determinada área en
triángulos, es decir, dado un conjunto de puntos en el plano P, una triangulación de P se
define como una familia maximal de triángulos interiores disjuntos cuyos vértices son los
puntos de P y en cuyo interior no hay ningún punto de P. Se dice que una triangulación T1
es mejor que T2 cuando el menor ángulo de los triángulos de T1 es mayor que el menor de
los ángulos de los triángulos de T2, por tanto la mejor combinación será aquella que
maximiza el ángulo mínimos de los triángulos.
En particular, una triangulación de P es una triangulación de Delaunay si y sólo si la
circunferencia circunscrita de cualquier triángulo de T no contiene puntos de P. Con ello,
los triángulos formados tenderán a maximizar sus ángulos mínimos y las aristas conectarán
93
nodos cercanos, siempre y cuando no se intersecten entre sí. Por tanto la triangulación de
Delaunay no es otra cosa que el grafo dual del diagrama de Voronoi, en que las aristas
corresponden a la unión de los puntos generadores que comparten un eje de Voronoi y a la
unión de puntos generadores vecinos ubicados en zonas no acotadas. Entre sus propiedades
se cuentan:
•
Cada triángulo posee como vértices a los puntos generadores del diagrama de
Voronoi.
•
La frontera corresponde a la envolvente convexa de los puntos generadores.
•
Maximiza el mínimo ángulo, por lo que constituye la mejor triangulación dado que
genera los triángulos más equiláteros posibles.
A continuación se presenta, a modo de ejemplo, la triangulación de Delaunay para 30
puntos generadores distribuidos uniformemente en una región de 100 por 100 metros.
100
90
80
70
[m]
60
50
40
30
20
10
0
0
10
20
30
40
50
60
70
80
90
100
[m]
.
Figura 5.9: Ejemplo de la triangulación de Delaunay
Con esta técnica se busca entonces disminuir el número de combinaciones factibles, dado
que es posible conocer cuales son las redes vecinas, a través de las aristas de la
94
triangulación, y con ello evitar analizar aquellas combinaciones entre redes alejadas. De
esta forma los subconjuntos de n elementos entre los m disponibles se realizarán sólo entre
aquellos que estén conectados mediante el grafo definido a través de la teselación en
cuestión, lo que dependerá de la distribución de los consumos en el plano, por lo que es
imposible determinar una expresión analítica para el número total de combinaciones. No
obstante, es factible para cada distribución espacial, construir las combinaciones que
cumplan la restricción de vecindad. Así, para una localización de 10 consumos es posible
realizar 800 subgrupos, número que se incrementa exponencialmente con el tamaño de la
entrada, de hecho 15 consumos producen 25.248 combinaciones, 16 consumos generan
52.141 subconjuntos, 17 ubicaciones provocan 102.509 subgrupos y 18 localizaciones
tienen 214.063 combinaciones35. En estos casos se calcularon todas las posibles
combinaciones de los m datos de entrada en subconjuntos de 1 hasta m, siempre y cuando
estuviesen comunicados por aristas de la triangulación. Si ahora sólo se consideran todos
los posibles grupos de 2 y 3 elementos que cumplan con la teselación se tiene:
35
Cada grupo corresponde a una distribución uniforme de los n elementos en una superficie de 10.000m2, se
debe señalar que los subconjuntos indicados que representan las combinaciones posibles son el resultado de
un caso particular de n elementos, por lo que los números señalados no son generales pero brindan igualmente
un indicador del orden de magnitud de las combinaciones factibles.
3500
500
450
400
350
300
250
200
150
100
50
0
Combinaciones
3000
2500
2000
1500
1000
500
213
197
181
165
149
133
117
101
85
69
53
37
5
21
0
Triangulaciones
95
Nodos Distribuidos Uniformemente
Número de Combinaciones
Número de Triangulaciones
Figura 5.10: Aumento de la triangulación producto del aumento en la entrada
En este caso el número de combinaciones crece linealmente con el tamaño de redes a
combinar, producto que, como se aprecia en el mismo gráfico, el número de triángulos que
se forma con la adición de un nuevo nodo en la red también se incrementa casi linealmente,
y como la conexión esta limitada por las aristas de los triángulos de la teselación, buscando
sólo combinaciones de dos y tres elementos, es fácil notar que las combinaciones de dos
elementos sin repetición corresponden necesariamente a las aristas de la triangulación que
dependen del número de triángulos formados y los conjuntos de tres elementos
corresponden por un lado los triángulos de la teselación más aquellos formados por aristas
que parten de un mismo vértice pero que pertenecen a triángulos distintos, en virtud de lo
cual al considerar sólo combinaciones de dos y tres elementos el factor que hace aumentar
el número de combinaciones al incrementar el tamaño de la entrada es la formación de un
nuevo triángulo en la teselación y como su comportamiento es lineal con el número de
nodos también lo será el número de combinaciones de dos y tres elementos formadas a
partir de él, toda vez que se está suponiendo una distribución espacial uniforme de los
nodos.
De donde, si se asume como supuesto que las recombinaciones se realizarán sólo uniendo
de dos y de tres redes con sus respectivos transformadores, de todas maneras las
96
combinaciones para la zona de análisis continúan siendo elevadas. Como referencia para el
caso de 200 redes se tienen del orden de 3000 combinaciones, además si se considera que
cada combinación implica un nuevo cálculo de conductores, posición y tamaño del nuevo
transformador, pérdidas y flujos por la nueva red, el problema de combinación se vuelve
inmanejable a través de técnicas convencionales de optimización, por lo cual se proponen
dos vías de acción. Por un lado, reconocer la utilidad de dividir un problema de gran
dimensión en problemas menores, situación que queda en evidencia en el capítulo 4, y por
tanto dividir la zona de planificación en vecindarios, siendo cada uno de ellos
independientes y buscando al interior de ellos la mejor recombinación posible. Por otro
lado, es asumir que el problema debe ser abordado en forma global de manera de buscar la
mejor reagrupación posible, lo cual sin duda no puede ser resuelto en forma determinística
por lo que se recurre al uso de una meta-heurística que ayude a encontrar una buena
solución para el problema, no necesariamente la óptima, para lo cual se utiliza la técnica
conocida como búsqueda tabú.
5.2.2
Resolución mediante vecindarios
Esta metodología consiste en aprovechar las ventajas de dividir el problema principal en
problemas más pequeños, reducción del número de combinaciones factibles, y de realizar
una agrupación inteligente de las distintas redes a través de los polígonos de Voronoi, para
lo cual se eligen como puntos generadores aquellos transformadores con capacidad
instalada superior a una determinada cota, por ejemplo 300 kVA, y cada polígono de
Voronoi incorpora al resto de los transformadores más cercanos, lo que implica asociar al
mismo polígono la red correspondiente a cada uno de los transformadores agrupados,
formando de esta manera distintos vecindarios, agrupaciones de redes, a los que se les
realizará el proceso de macro-optimización basado en la unión de redes. Tal proceso, en
atención a que la división del problema trae consigo una disminución considerable de los
casos factibles, realiza la recombinación mediante enumeración completa, esto es que cada
una de las combinaciones posibles al interior de un vecindario será revisada, escogiendo el
conjunto de combinaciones que produzca más ahorro con respecto al caso base. Se debe
tener presente que la referencia a conjunto de combinaciones indica que la solución final
97
encontrada para cada vecindario corresponde a una combinación de combinaciones que
producen ahorro, siempre y cuando dichas combinaciones no presenten redes comunes. Por
ejemplo, sean A, B, C, D y E redes de un mismo vecindario, si se toman todas las
combinaciones posibles se tiene:
•
Grupos de 1 red
: A-B-C-D-E
•
Grupos de 2 redes
: AB-AC-AD-AE-BC-BD-BE-CD-CE-DE
•
Grupos de 3 redes
: ABC-ABD-ABE-ACD-ACE-ADE-BCD-BCE-BDE-CDE
•
Grupos de 4 redes
: ABCD-ABCE-ABDE-ACDE-BCDE
•
Grupos de 5 redes
: ABCDE
Con lo que la solución final será la mejor combinación de los grupos anteriores, con el
cuidado de no utilizar en la solución final más de una vez la misma red. Así por ejemplo
una posible solución final puede ser A-BE-CD.
Para evitar trabajo innecesario y no evaluar la totalidad de las combinaciones, se opta por
realizar la evaluación sólo en aquellas combinaciones factibles, definiendo la factibilidad en
forma secuencial, y por ende cuando una combinación satisface la secuencia, se considera
como candidata para formar parte en la combinación final. Entonces:
1. Serán combinaciones factibles en etapa 1 todas aquellas combinaciones del
vecindario que se encuentren conectadas por al menos dos vértices del polígono de
Voronoi o análogamente por una arista de la triangulación de Delaunay del
vecindario correspondiente, esto con el fin de evitar que la combinación entre redes
se superponga a alguna red que no pertenece a la combinación, y así evitar la
duplicación de redes sobre una zona determinada.
2. Serán combinaciones factibles en etapa 2 todas aquellas combinaciones factibles en
etapa 1, que no producen componentes conexas en la representación de grafo de la
red vial, es decir sólo serán factibles aquellas combinaciones que se encuentren
comunicadas a través de la red vial sin la formación de islas viales, ya que ello
implicaría la necesidad de al menos un transformador por cada isla formada,
situación que se aleja del objetivo de combinar redes para disminuir los costos.
98
3. Serán combinaciones factibles todas aquellas combinaciones factibles en etapa 2,
que al realizarse tal combinación el costo total es menor que la suma de los costos
totales de cada una de las redes que forman la combinación. Por tanto, las
combinaciones factibles serán en resumen, las realizadas entre vecinos conectados
vialmente que generen ahorros con respecto a la no realización de la combinación.
Una vez que se conoce el ahorro que se produce con cada una de las combinaciones
factibles, se debe proceder a combinarlas a fin de encontrar la solución final. Siguiendo con
el ejemplo, luego del análisis de factibilidad, las combinaciones podrían ser:
•
Grupos de 1 red
: A-B-C-D-E
•
Grupos de 2 redes
: AB-AD-BC- BE-CE
•
Grupos de 3 redes
: ABD-ACD-BDE-CDE
•
Grupos de 4 redes
: ABDE
•
Grupos de 5 redes
: (Combinación no factible)
De esta forma las combinaciones finales factibles serían:
•
ABDE-C
•
ABD-CE
•
ABD-C-E
•
ACD-BE
•
ACD-B-E
•
DCE-AB
•
DCE-A-B
•
AB-CD-E
•
AD-BC-E
•
AD-BE-C
•
AD-CE-B
•
AD-B-C-E
•
BC-A-D-E
99
•
BE-A-C-D
•
CE-A-B-D
Como se conoce el ahorro de cada combinación factible, la solución final vendrá dada por
aquella que agrupe de mejor forma las combinaciones anteriores, de manera que produzca
el mayor ahorro posible, dicho procedimiento es realizado mediante enumeración completa.
El inconveniente de la metodología descrita es que se permiten todas las agrupaciones,
siendo altamente probable que muchas de ellas no produzcan ahorros e igualmente generen
aumentos en los tiempos de ejecución, ello producto que las combinaciones de varias redes
implican la optimización de una zona mayor, con lo que el tiempo de procesamiento crece,
y también lo hace necesariamente el tamaño de la red de distribución, aumentando en
exceso las pérdidas asociadas, y por tanto incrementado los costos en relación al caso en
que todas las redes se mantienen independientes. De hecho como se muestra en la tabla 5.3,
en que la cota se estableció en 300 kVA, si se permiten agrupaciones de dos, tres, hasta
nueve redes, escogiendo nueve como cota superior dado que corresponde al máximo
número de redes al interior de un vecindario, se tiene que un aumento en el número de
elementos a combinar provoca un aumento en el tiempo de ejecución con un incremento
menor en el ahorro asociado.
Tabla 5.3: Ahorro v/s número de combinaciones con cota en 300 kVA
Número de redes a
combinar
2
3
4
5
6
7
8
9
Ahorro ($)
46.093.449
48.673.315
48.759.939
49.265.430
49.744.881
50.246.559
50.246.559
50.246.559
Tiempo (min)
2,07
3,14
3,73
4,18
4,47
4,55
4,54
4,55
Es más, si se analiza el caso de 500 kVA, se observa que el aumento en el número de
elementos a combinar incrementa los tiempos de ejecución, esto se debe a que como
100
existen menos puntos generadores el tamaño del polígono es mayor y por tanto el número
de redes al interior de un vecindario también es mayor, con lo cual el número de
combinaciones de n elementos crece, probándose más casos y por ende consumiendo más
tiempo en su solución. En efecto, para el caso de cota en 500 kVA se obtiene que, si se
realizan combinaciones de dos elementos se logra un ahorro de $ 67.335.440 en un tiempo
de 4 minutos. Al aumentar a tres los elementos a combinar en cada vecindario, el tiempo
crece a 10 minutos con un ahorro que aumenta a tan sólo $ 74.643.055, si el número es 4 el
ahorro es de $ 74.935.026, manteniéndose casi inalterable, en un tiempo de 33 minutos. Se
debe señalar además, que para un incremento adicional al mencionado fue imposible lograr
la convergencia, toda vez que el número de combinaciones era elevado, puesto que uno de
los vecindarios posee 52 redes, lo que da un número de combinaciones posibles de
2.598.960, haciendo inmanejable la búsqueda de una solución.
De lo anterior es posible deducir que el incremento de combinaciones si bien aumenta los
ahorros también produce mermas en la velocidad de solución del problema, por lo que se
necesita encontrar una forma de producir ahorros relevantes pero sin la necesidad de
tiempos extremos de ejecución. Para evitar tal problema, se propone la utilización cíclica
del procedimiento planteado, pero sólo considerando combinaciones de dos redes, ello con
el fin de comparar sólo casos que toman menos tiempo ya que abordan una zona de
planificación menor y además son más probables de generar ahorros que las combinaciones
entre un número superior de redes. El algoritmo propuesto es:
1. Dividir la zona de planificación en vecindarios a través del diagrama de Voronoi
2. Para cada vecindario realizar todas las combinaciones posibles de dos elementos.
2.1 Determinar todas las combinaciones factibles y el ahorro que producen.
3. Combinar las redes factibles de manera de originar la solución final.
4. Actualizar la red incluyendo las combinaciones realizadas.
5. Repetir pasos anteriores hasta que no existan ahorros en la recombinación de redes.
El desarrollo cíclico de la metodología anterior, se explica en que si bien las combinaciones
de dos redes son más probables que sean factibles, ello no garantiza que combinaciones de
101
más de dos redes no lo sean, por lo cual al permitir que la nuevas redes formadas, puedan
seguir combinándose ya sea con redes nuevas o con redes no combinadas en la etapa
anterior, implícitamente rescata el hecho de la posibilidad de combinaciones entre un
número superior de ellas, pero evitando la evaluación de todas las combinaciones posibles,
lo que implica un ahorro en tiempos de ejecución.
Utilizando este procedimiento se obtienen lo siguientes resultados.
Tabla 5.4: Ahorros por la recombinación de redes
Cota (kVA)
Ahorro ($)
10
15
30
45
75
100
150
300
500
0
3.975.755
9.568.937
15.351.388
19.462.245
25.966.288
43.120.248
53.915.232
76.392.742
Tiempo
(min)
0,09
0,44
0,62
0,77
1,03
1,18
2,29
6,62
16,25
Donde además es posible notar que los ahorros aumentan en la medida que la cota utilizada
para la creación de los vecindarios también crece, ello es debido a que el número de
polígonos que cubre la zona de planificación disminuye, con lo cual cada vecindario agrupa
a un mayor número de redes. En este escenario entonces es válido preguntar por que no
ampliar al máximo la zona de análisis, es decir utilizar un único vecindario que incluya
todas las redes a combinar. Tal como se mencionó, dicho problema, al ser de una
complejidad combinatoria elevada, será resuelto mediante búsqueda tabú en la siguiente
sección.
5.2.3
Resolución mediante búsqueda tabú
De manera de comprender el procedimiento propuesto, se realizará una pequeña reseña
acerca de la búsqueda tabú, para posteriormente explicar la forma en que fue aplicada al
problema de combinación de redes, incluyendo la formulación y los resultados encontrados.
102
Búsqueda tabú
La búsqueda tabú constituye una meta-heurística, es decir un algoritmo heurístico de
optimización, genérico e independiente del problema a optimizar, que se adapta con
pequeñas modificaciones a la resolución de un problema determinado. Entendiéndose por
algoritmo heurístico a un proceso simple, que supone la obtención de una buena solución,
no necesariamente óptima, de un modo relativamente fácil y rápido en problemas de alta
complejidad (NP, NP-completos). Fue propuesta por Fred Glover en la década de los 80, y
desde esa fecha ha sido utilizada con éxito en una gran variedad de problemas tales como
planificación de maquinarias, diseño de topología de redes, reconocimiento de patrones,
asignación de rutas, localización y asignación de recursos, es decir, en una multitud de
problemas de optimización combinatorial (Glover, 1995).
Básicamente la búsqueda tabú consiste en un algoritmo iterativo que explora el espacio de
soluciones sin entramparse necesariamente en un óptimo local, para ello se permiten
movimientos que empeoran la solución, a la vez que los últimos movimientos se almacenan
en una lista, y no pueden ser realizados en las siguientes iteraciones (lista tabú), de forma
de evitar ciclos durante el proceso de optimización, es decir, la búsqueda tabú es una
combinación de búsqueda local con memoria de corto plazo. Otro elemento a considerar,
además de la lista tabú tendiente a evitar ciclos, es el denominado criterio de aspiración, el
cual consiste en que si alguno de los movimientos prohibidos almacenados en la lista tabú,
cumple una determinada condición, típicamente si mejora la solución, puede ser liberado y
utilizado en el proceso de optimización, fenómeno conocido como olvido estratégico. En
virtud de lo anterior y considerando que X es el conjunto de todas las posibles soluciones, x
cualquier solución, N(x) el conjunto de todas las soluciones vecinas a x (N(x) ⊂ X), T la
lista tabú, el algoritmo simplificado es:
1. Se elije una solución factible inicial x, con x ∈ X, inicializándose la mejor solución
en x* : = x, e inicializando el contador k y la lista tabú.
2. Si N(x)-T = vacío, pasar a 4. En otro caso se toma la solución n(x), considerando la
siguiente subrutina:
103
a. Se evalúan todas las soluciones de N(x), ordenándose de mejor a peor.
b. Se escoge la mejor solución n1(x) ∈ N(x)
c. Si n1(x) ∉ T, entonces n(x)=n1(x). En otro caso, si n(x) es mejor que
x*(criterio de aspiración), entonces n(x)=n1(x). Si n(x) no es mejor que x*,
entonces elegir la segunda mejor solución de N(x) y repetir c.
3. x = n(x). Si x mejora la solución entonces x* : = x
4. Si el número de iteraciones es máximo ó N(x)-T = vacío ó la solución no mejora
luego de un número determinado de iteraciones, entonces finaliza. Sino actualiza T
= [T; x], k=k+1 y se retorna a 2.
Del algoritmo se desprende que su elemento fundamental es la lista tabú, y en particular, lo
es la elección del tamaño de la lista, es decir, el número máximo de movimientos que serán
considerados prohibidos. Así una lista de tamaño N garantizará que no se van a crear ciclos
de largo inferior a N. La elección de este parámetro es un dato de entrada al problema, y
normalmente la forma de implementarlo es a través de una lista circular, en la cual el
último movimiento se pone al principio de la lista y el último elemento de la lista, si es que
ésta se completa, es liberado de la prohibición.
Esta meta-heurística constituye una herramienta poderosa que ha sido ampliamente
utilizada, en particular, en el sector eléctrico ha sido empleada en planificación de la
expansión de redes de transmisión (Da Silva et al, 2001, Wen y Chang, 1997) en
localización óptima de condensadores (Huang et al, 1996), por mencionar sólo alguna de
sus aplicaciones.
Combinación de redes vía búsqueda tabú.
El objetivo de la búsqueda tabú en este trabajo, es entregar una buena combinación entre
redes, de manera de disminuir los costos obtenidos del proceso de micro-optimización. En
la siguiente figura se muestra un conjunto de redes, demarcadas por la envolvente convexa
que engloba a todos los consumos de cada una de ellas, y donde los puntos más grandes,
representan la posición del transformador, indicando algunas zonas que al unirse
posiblemente constituirían mejoras a la función objetivo, observando además, que si un
104
transformador es utilizado en una combinación ya no puede ser utilizado en otra, por lo que
la elección del conjunto de mejores combinaciones no es trivial, toda vez que el número de
combinaciones posibles aumenta exponencialmente con el número de transformadores.
[y]
[x]
Figura 5.11: Posibilidad de combinación de redes
Así lo que se busca es el mejor mix entre las posibles combinaciones, siempre y cuando
cada red combinada sea utilizada en una única combinación, lo que se representa de
acuerdo a la siguiente estructura:
1
1
2
1
2
4
4
En donde el largo de la estructura representa el número de redes totales en el área de
análisis, la posición en la estructura identifica a una determinada red, y el valor al interior
de la estructura indica la combinación utilizada, es decir en la solución mostrada se tienen
20 redes a combinar, en que las redes 2-3-5 se unen a través de la combinación 1, las redes
4-7 lo hacen mediante la combinación 2, las redes 13-14 son mezcladas por la combinación
4. Para conseguir tal resultado el algoritmo propuesto es el siguiente:
105
1. Se realiza la triangulación de Delaunay tomando como vértices la posición de los
transformadores.
2. Se realizan todas las posibles combinaciones de transformadores y redes asociadas,
siempre y cuando se encuentren conectadas por una arista de la triangulación y
exista conexión vial entre las redes (sin generación de componentes conexas).
3. Para cada combinación se calcula el ahorro que se produce al realizarla, en caso de
no existir ahorro la combinación deja de ser factible.
4. Se ordenan de mayor a menor las combinaciones factibles, de acuerdo al ahorro que
producen.
5. Se inicializa la solución escogiendo como valor inicial la combinación que produce
el mayor ahorro de la lista anterior (Mejor Movimiento)
6. Se escoge la siguiente mejor combinación (mejor ahorro)
a. Si la nueva combinación no une redes que ya han sido incluidas en la
solución, se adiciona a ella.
b. Si la nueva combinación utiliza al menos una red que pertenece a la
solución actual, se agrega la nueva combinación (empeoramiento de la
solución y/o aumento del espacio de búsqueda) y se eliminan de la solución
todas aquellas combinaciones anteriores que involucren redes contenidas en
la nueva combinación. Las combinaciones eliminadas pasan a la lista tabú, y
por tanto no pueden ser utilizadas hasta que salgan de ella (el número de
iteraciones que permanecen en la lista, se denomina largo tabú y es definido
a priori).
7. Se disminuye en uno el contador de la lista tabú, para cada combinación en ella
incluida. Sí para una determinada combinación el contador llega a cero, significa
que puede dejar la lista tabú y por tanto es agregada nuevamente a la lista de
combinaciones factibles.
8. Se ordena de mayor a menor la lista actual de combinaciones factibles.
9. Se vuelve al paso 5. El proceso se detiene si:
a. Se alcanza el número máximo de iteraciones
b. La lista de soluciones factibles es vacía.
106
Aplicando la metodología propuesta, en forma iterativa tal como se explicó en el caso de
macro-optimización por vecindarios, es posible obtener un ahorro de $ 78.054.181,
representando un 4 % del costo del caso base, en un tiempo de 19 minutos. Observándose
que existe una leve mejoría con respecto a la recombinación basada en vecindarios,
mostrando un ahorro 2 % superior al mejor ahorro señalado en la Tabla 5.3.
A modo de ejemplo a continuación se presentan dos figuras, la primera representa la salida
del proceso de micro-optimización (252 redes), en tanto que la segunda indica la salida del
proceso de macro-optimización (190 redes), en ambos casos los transformadores están
indicados por un punto y los consumos asociados a cada red están encerrados a través de su
envolvente convexa.
12000
11000
10000
[m]
9000
8000
7000
6000
3.6
3.65
3.7
3.75
3.8
3.85
[m]
3.9
3.95
4
4.05
4.1
4
x 10
Figura 5.12: Configuración de redes producto de la micro-optimización
107
12000
11000
10000
[m]
9000
8000
7000
6000
3.6
3.65
3.7
3.75
3.8
3.85
[m]
3.9
3.95
4
4.05
4.1
4
x 10
Figura 5.13: Configuración de redes producto de la macro-optimización
5.3
Macro-Optimización: Unión Diagramas de Voronoi y Búsqueda Tabú
Considerando las bondades de las dos metodologías propuestas, en este algoritmo
finalmente se propone la realización secuencial de ellas. De tal forma de incluir la
asociación inteligente producto del diagrama de Voronoi y la incorporación de información
adicional y de mejora de la función objetivo a través de la recombinación de redes gracias a
la búsqueda tabú. Por tanto la secuencia recomendada de aplicación sería la siguiente:
1. Micro-optimización simplificada, sin las restricciones viales ni consideración de la
red eléctrica.
2. Trazado del diagrama de Voronoi tomando como puntos generadores la ubicación
de los transformadores obtenidas en el paso anterior.
3. Micro-optimización completa y detallada para cada uno de los polígonos de
Voronoi.
108
4. Macro-optimización de recombinación entre todas las redes obtenidas luego del
proceso de micro-optimización.
Con esta solución se presentan los mayores ahorros con respecto al caso base dado por la
aplicación exclusiva del proceso de micro-optimización explicado en el capítulo 4, en
efecto el ahorro total es de $ 135.972.397 (197 redes) representando un descuento de 7.4 %
respecto del caso base.
12000
11000
10000
[m]
9000
8000
7000
6000
3.6
3.65
3.7
3.75
3.8
[m]
3.85
3.9
3.95
4
4.05
4.1
4
x 10
Figura 5.14: Configuración de redes luego de la macro-optimización secuencial
109
6.
PLANIFICACION OPTIMA DEL GRAN SANTIAGO
Este capítulo ilustra la aplicabilidad de la metodología propuesta a la planificación de una
zona de gran tamaño, en particular se mostrará la posibilidad de acción de los distintos
mecanismos sobre los consumos de baja tensión, suministrados por CHILECTRA en la
Región Metropolitana36, abasteciendo del orden de 1.300.000 clientes distribuidos en una
superficie aproximada de 2.118 km2. Se debe recordar que los datos de demanda utilizados
como base del estudio corresponden a datos actualizados a diciembre del año 2003, ello
producto que el estudio tarifario 2004, tomó como base dicha fecha y por ende las
comparaciones con tales resultados sólo son posibles si se toma la misma referencia. A tal
fecha, la compañía distribuidora contaba con 9.333 kilómetros de redes de baja tensión,
20.285 transformadores de distribución con una capacidad total instalada de 2.456 MVA
suministrando un total de 3.917 GWh, correspondientes a consumos de energía de los
clientes conectados a través de la red de baja tensión37.
En esta sección sólo se mostrarán los resultados finales obtenidos, con una breve
explicación, puesto que la metodología corresponde a lo explicado en extenso en los
capítulos anteriores, mostrándose la aplicación de cada procedimiento a la totalidad de la
zona de concesión de CHILECTRA.
6.1
Aplicación del Proceso de Micro-Optimización
Este procedimiento reviste gran importancia puesto que corresponde a la estructura
fundamental de todas las metodologías propuestas, ya que los procesos de macrooptimización la utilizan como dato de entrada.
36
La zona de análisis incluye a la ciudad de Santiago, capital de Chile, con una población al 31 de diciembre
del 2003 de 5.3 millones de habitantes.
37
Las ventas totales de energía para el año 2003 fueron de 8.696 GWh, repartiéndose 3.917 GWh a clientes
de baja tensión y 4.779 GWh a clientes de media tensión.
110
Del capítulo 4 fue posible encontrar que un tamaño adecuado para la zona de análisis era de
500 x 500 metros. También se pudo mostrar que en el proceso iterativo asociado a la microoptimización, al encontrar un valle en la función de costo se está, con alta probabilidad, en
presencia de un mínimo global. Además se observó que en la metodología propuesta, el
equilibrio de red sólo es significativo al finalizar el proceso iterativo, todas conclusiones
que son aplicadas a la micro-optimización del Gran Santiago. Así, la división de la zona a
planificar se muestra en la siguiente figura.
4
7
x 10
6
5
4
[m]
3
2
1
0
0
1
2
[m]
3
4
5
6
4
x 10
Figura 6.1: División en mini-zonas del gran Santiago
111
Existe un total de 3103 mini-zonas a optimizar, las que para 10 lanzamientos del algoritmo,
tabla 6.1, entregan un costo promedio de $ 71.027.164.452 en un tiempo de ejecución
promedio de 168,3 minutos correspondientes a 2,8 horas38.
Tabla 6.1: Micro-optimización del gran Santiago
Lanzamiento
Costo Total ($)
Tiempo (min)
1
2
3
4
5
6
7
8
9
10
70.973.285.445
71.158.531.278
70.921.325.234
70.951.990.818
71.098.651.683
71.067.957.121
70.972.409.405
71.003.831.236
71.014.399.273
71.109.263.030
173,5
167,8
167,6
167,6
167,3
168,9
167,4
167,0
167,4
168,7
De tales simulaciones, es posible obtener que el largo promedio de la red de baja tensión es
7.828 Km, que se utilizan 12.039 transformadores con una capacidad total instalada en
baja tensión de 2.861 MVA, con pérdidas de energía para el año base de 54.142 MWh.
Si bien, la red trazada corresponde sólo a una red área de baja tensión, y por tanto no
reconoce las zonas subterráneas del área de planificación, ni tampoco su relación directa
con la red de distribución de media tensión, es posible cotejar, de todas formas, el orden de
los resultados obtenidos, con los estudios de VAD realizados en la fijación tarifaria
utilizada como referencia, de manera de comprobar la coherencia de las salidas obtenidas.
Por ejemplo, en el caso de las pérdidas para el año inicial, en donde se ve reflejado tanto el
trazado como el tipo de conductores seleccionados, se tiene que en el estudio encargado por
la empresa distribuidora, en adelante estudio de la distribuidora (Systep e Inecon, 2004), las
pérdidas corresponden a 75.312 MWh y en el estudio encargado por la Comisión Nacional
de Energía, en adelante estudio de la CNE (Synex, Mercados Energéticos y Jadresic
Consulting, 2004), ascienden a un valor de 35.580 MWh, ubicándose el resultado aquí
38
La tabla completa para todos los lanzamientos, con el desglose de costos e infraestructura se presenta en el
112
obtenido entre ambos valores. En cuanto a los kilómetros de red, el resultado obtenido es
menor tanto al estudio de la distribuidora como al estudio de la CNE, cuyos valores son
9.050 km y 9.075 km respectivamente, este hecho no debe ser explicado por si sólo, sino
que debe considerarse lo que sucede con los transformadores. En el estudio de la
distribuidora el número óptimo es de 7.247 y en el estudio de la CNE es de 8.416 unidades,
por lo tanto, con la metodología propuesta se obtiene un resultado absolutamente coherente,
toda vez que el número de transformadores obtenido es mayor y el largo de red es menor39
que en los estudios citados, situación que acontece dada la división arbitraria de la gran
zona de planificación en mini-zonas de optimización, en las cuales al respetar el tendido
vial y por ende al no trazar redes entre zonas no vialmente conectadas, se fuerza a que en
cada isla vial de cada una de las mini-zonas, exista al menos un transformador.
6.2
Aplicación del Proceso de Macro-Optimización
Para evitar el posible exceso de transformadores y eventuales costos extras asociados a la
división arbitraria del área de análisis, se desarrollaron metodologías adicionales para
realizar una fragmentación inteligente del problema, las cuales serán aplicadas al Gran
Santiago. Debido a que la comparación es con respecto al proceso de micro-optimización y
tal metodología es no determinística, se tomará como base un lanzamiento particular de la
metodología, para que en los procesos de macro-optimización la referencia sea la misma.
En suma, los resultados para dicho lanzamiento con un tiempo de ejecución de 167
minutos, son:
•
Costo total
: $ 70.973.296.670
•
Costo total + pérdidas
: $ 79.981.055.629
•
Número de transformadores : 12.052 unidades
•
Largo de red
: 7.822 kilómetros
•
Capacidad instalada
: 2.859 MVA.
Anexo H
39
En las redes de distribución se tiene que los transformadores con sus redes asociadas tienen una relación
inversamente proporcional, en el caso extremo si cada consumo tuviese su propio transformador la red de
distribución de baja tensión sería cero.
113
Resultando por tanto, un total de 12.052 redes asociadas a sus respectivos transformadores,
lo que se puede visualizar en la figura 6.2, donde cada red esta acotada por la envolvente
convexa de los consumos que la componen.
114
[m]
[m]
[m]
[m]
Figura 6.2: Redes del caso base: micro-optimización
115
6.2.1
Metodología basada en diagrama de Voronoi
Se realiza el trazado del diagrama de Voronoi, considerando como puntos generadores de
los polígonos, a la ubicación de los transformadores obtenidos en la etapa de microoptimización, para luego aplicar a cada nueva mini-zona irregular el proceso de microoptimización completo. Se debe recordar que los mejores resultados se obtuvieron cuando
los puntos generadores correspondían a aquellos asociados a transformadores superiores a
300 kVA, y por tanto en esta aplicación, se emplea tal condición como base para elaborar
los polígonos de Voronoi de Santiago. Con ello, en la figura 6.2, es posible apreciar la
aplicación de esta técnica para la zona en cuestión.
Con esta metodología se obtuvo un costo menor que el caso base, arrojando los siguientes
resultados:
•
Costo total
: $ 70.098.342.446
•
Costo total + pérdidas
: $ 78.133.902.585
•
Número de transformadores : 11.966 unidades
•
Largo de red
: 8.210 kilómetros
•
Capacidad instalada
: 2.895 MVA.
Lo que constituye una mejora de 2,31 % (aproximadamente dos mil millones de pesos) con
respecto al caso base considerando las pérdidas. Para clarificar los resultados, se aplicó el
mismo procedimiento, pero ahora considerando como centro de los polígonos a aquellos
transformadores superiores a 500 kVA, obteniendo lo siguiente:
•
Costo total
: $ 69.384.475.120
•
Costo total + pérdidas
: $ 78.256.523.843
•
Número de transformadores : 11.355 unidades
•
Largo de red
: 8.347 kilómetros
•
Capacidad instalada
: 2.869 MVA.
116
En ambos casos, es posible apreciar una disminución en el costo total, asociado a la mejor
asignación de los consumos, lo que se traduce en un menor número de transformadores y
por consiguiente un mayor largo de red. Se debe señalar que los tiempos de simulación
fueron de 179 y 252 minutos respectivamente, sin considerar el tiempo requerido por el
caso base.
117
4
x 10
6
5
4
[m]
3
2
1
0
0
1
2
3
4
5
[m]
4
x 10
4
x 10
1.5
1.4
1.3
[m]
1.2
1.1
1
0.9
0.8
0.7
3.4
3.6
3.8
[m]
4
4.2
4.4
4
x 10
Figura 6.3: Diagrama de Voronoi aplicado a Santiago
6.2.2
Metodología simplificada basada en diagrama de Voronoi
Se desarrolló el diagrama de Voronoi pero sin utilizar el proceso de micro-optimización
para la generación de los polígonos, sino que las ubicaciones generadoras provienen de un
proceso de micro-optimización simplificado, que no considera ni el trazado de la red ni el
trazado vial y sólo incluye en el análisis la demanda y la elección y ubicación del
118
trasformador adecuado, ello con el fin de evitar los 167 minutos asociados al caso base. De
esta forma, el procedimiento simplificado requiere sólo 14 minutos para su ejecución, luego
de lo cual se realiza el diagrama de Voronoi y se aplica el procedimiento de microoptimización completo para cada uno de los polígonos formados.
Al igual que en el caso anterior, se consideraron como puntos generadores las ubicaciones
de aquellos transformadores, que de acuerdo al procedimiento de micro-optimización
simplificado son superiores a 300 kVA y luego a 500 kVA, con lo cual, los resultados para
el primer caso son:
•
Costo total
: $ 70.505.021.797
•
Costo total + pérdidas
: $ 78.722.075.399
•
Número de transformadores : 11.815 unidades
•
Largo de red
: 8.261 kilómetros
•
Capacidad instalada
: 2.892 MVA.
Y para el caso de 500 kVA son:
•
Costo total
: $ 70.337.529.277
•
Costo total + pérdidas
: $ 78.729.180.328
•
Número de transformadores : 11.447 unidades
•
Largo de red
: 8.292 kilómetros
•
Capacidad instalada
: 2.874 MVA.
Si bien, en ambos casos los ahorros no superan el 2%, se debe señalar la ventaja en tiempo
que esta metodología brinda, toda vez que sólo demora 170 y 240 minutos,
respectivamente, sin necesidad de los 167 minutos adicionales del caso base.
119
6.2.3
Metodología basada en vecindarios
Este procedimiento busca incorporar las posibles economías producto de unir redes vecinas,
esto es, hacer que zonas aledañas que tienen su propio transformador y red sean unidas de
manera de suministrarlas a través de un único transformador con sólo una red asociada,
para ello se divide la zona en vecindarios utilizando los polígonos de Voronoi, para luego
en cada uno de los vecindarios encontrar la mejor combinación de redes, de forma de lograr
una disminución en el costo total.
Entonces, cada uno de los vecindarios está formado por todas las redes que quedan al
interior de un polígono de Voronoi, los que son creados tomando como puntos generadores
la ubicación de todos los trasformadores del caso base, cuya capacidad sea superior o igual
a 500 kVA. Aplicando tal procedimiento, se obtienen 4.103 vecindarios para Santiago, tal
como se aprecia en la figura 6.4, en particular, en su figura inferior es posible notar como
cada vecindario (polígonos convexos de líneas gruesas), contiene un conjunto de redes a
combinar (polígonos convexos de líneas delgadas).
Así, en cada vecindario se encuentra la mejor combinación, es decir la que produce
mayores ahorros, entre las redes que lo componen. Siendo el ahorro final, la sumatoria de
los ahorros producidos en cada uno de los vecindarios. De esta forma, el ahorro total
obtenido, con respecto al caso base, es de $ 2.824.076.757 lo que representa un ahorro de
3,53 %, ejecutándose el procedimiento en 178 minutos. El resumen de los resultados
obtenidos es el siguiente:
•
Costo total
: $ 67.338.746.724
•
Costo total + pérdidas
: $ 77.156.978.872
•
Número de transformadores : 9.357 unidades
•
Largo de red
: 8.187 kilómetros
•
Capacidad instalada
: 2.741 MVA.
120
[m]
[m]
[m]
[m]
Figura 6.4: Creación de vecindarios para la recombinación de redes
121
6.2.4
Metodología basada en búsqueda tabú y único vecindario
Al igual que en el caso anterior se buscan las economías producto de la unión de redes
aledañas, pero esta vez sin la realización de vecindarios, sino que buscando la mejor
combinación de entre todas las redes que se obtienen luego del proceso de microoptimización. Dada la gran cantidad de combinaciones posibles, se opta por la heurística
búsqueda tabú para conseguirlo. Además, para disminuir el espacio de búsqueda de la
solución, que en este caso constituye encontrar el conjunto de mejores combinaciones entre
redes, se evitan aquellos casos en que se busca unir redes alejadas o separadas por alguna
red intermedia, para ello se realiza la triangulación de Delaunay, entre todas las redes del
caso base, representadas por su transformador asociado. Esta triangulación, para el caso de
Santiago se presenta en la figura 6.5.
122
[m]
Aristas de la Triangulación de Delaunay
[m]
Figura 6.5: Triangulación de Delaunay para Santiago
De esa manera, sólo se consideran como redes factibles a combinar, aquellas que
inicialmente se encuentran unidas a través de aristas de la triangulación (ver 5.2.2),
reduciendo considerablemente el espacio de búsqueda al combinar únicamente redes
vecinas.
Con este procedimiento y requiriendo un tiempo de ejecución40 de 254 minutos, se
obtuvieron los siguientes resultados:
40
•
Costo total
: $ 65.463.843.208
•
Costo total + pérdidas
: $ 76.041.409.699
•
Número de transformadores : 8.404 unidades
Este tiempo incluye sólo el requerido para la realización de la metodología de macro-optimización, sin
considerar el tiempo necesario para la realización del caso base que entrega las redes iniciales.
123
•
Largo de red
: 8.746 kilómetros
•
Capacidad instalada
: 2.664 MVA.
De donde se obtiene un ahorro de $3.939.645.930, que representa una disminución de 4,93
% con respecto al caso base.
6.2.5
Metodología secuencial Voronoi-búsqueda tabú
La metodología aquí señalada busca aprovechar la utilización de mini-zonas irregulares y
los ahorros que se producen al combinar redes, para lo cual se realiza secuencialmente
sobre Santiago la aplicación de los polígonos de Voronoi y luego sobre las redes ahí
resultantes, el proceso de recombinación.
Se hace necesario responder a la siguiente interrogante, ¿Qué metodología de Voronoi y
que metodología de recombinación de redes utilizar?. Frente a lo primero, para el
procedimiento de mini-zonas irregulares se opta por el proceso de Voronoi simplificado,
ello por el ahorro de tiempo que involucra, puesto que los puntos generadores de los
polígonos no provienen del proceso de micro-optimización (167 minutos) sino de una
simplificación del mismo (14 minutos), y así sólo se requiere de un única aplicación de la
metodología de micro-optimización (170 minutos) sobre las mini-zonas irregulares
formadas en el proceso simplificado. Respecto a la recombinación de redes se utiliza la
metodología de macro-optimización basada en búsqueda tabú, la cual es aplicada sobre un
único gran vecindario representado por la totalidad de Santiago. Esta elección es producto
que presenta mayores ahorros que la metodología de macro-optimización basada en
vecindarios. Por lo tanto, el proceso aquí ejecutado es el siguiente:
1. Micro-optimización Simplificado (14 minutos)
2. Micro-optimización Completa (170 minutos)
3. Macro-optimización de búsqueda tabú con único vecindario (207 minutos)
124
Al realizar esta aplicación secuencial se obtiene un ahorro final de $ 4.901.118.462 que
representa una disminución de 6,13 % con respecto al caso base. Los resultados obtenidos
son:
•
Costo total
: $ 64.422.594.684
•
Costo total + pérdidas
: $ 75.079.937.167
•
Número de transformadores : 7.686 unidades
•
Largo de red
: 8.935 kilómetros
•
Capacidad instalada
: 2.625 MVA.
125
7.
CONCLUSIONES Y TRABAJOS FUTUROS
7.1
Conclusiones
La principal contribución de la presente investigación está dada por el desarrollo de una
metodología capaz de dar respuesta al problema de planificación de redes de distribución,
cuando ésta es del tipo greenfield planning, es decir cuando los únicos datos de entrada son
la ubicación y el consumo de los clientes. Este procedimiento busca minimizar el costo de
inversión en transformadores y conductores más el costo de pérdidas, entregando como
resultado el costo, capacidad y ubicación de los transformadores de distribución, el costo y
tipo de los conductores utilizados y el trazado de las redes asociadas a cada transformador.
En la sección referida al Estado del Arte, se pudo constatar que el problema en cuestión ha
sido abordado ampliamente, inicialmente a través de herramientas tradicionales de
programación matemática, con las cuales sólo era posible enfrentar problemas de tamaño
reducido. En la medida que los problemas a resolver fueron aumentando de tamaño, dichas
metodologías perdieron poder de resolución, dando paso al uso de heurísticas, mediante las
cuales, si bien, no se garantiza la obtención del óptimo global, es posible obtener buenas
soluciones a problemas complejos de gran tamaño. Es en esta línea, que la presente tesis
aborda la planificación de redes de distribución, logrando resolver la optimización del gran
Santiago, el cual abastece a cerca de 1.300.000 clientes distribuidos en una superficie
aproximada de 2.118 km2.
Esta metodología muestra la aplicabilidad del procedimiento “Dividir y Conquistar”, en
cuanto Santiago fue dividido en zonas de menor tamaño, disminuyendo considerablemente
la característica combinatoria del problema, y optimizando en forma independiente cada
una de las mini-zonas, con lo cual se logró encontrar solución al problema en tan sólo 167
minutos. Tiempo que podría mejorar, toda vez que es posible aplicar proceso paralelos en
su solución, por ejemplo, si el problema es dividido en n mini-zonas, n/2 podrían ser
realizadas en un computador y las otras n/2 en otro computador, en forma simultánea.
Como la optimización entre mini-zonas es independiente, el tiempo de ejecución podría ser
disminuido aproximadamente a la mitad y así los tiempos disminuirían progresivamente en
126
la medida que se incorporan nuevas estaciones de trabajo a la resolución del problema, lo
que constituye un acierto de la metodología de micro-optimización propuesta.
Del proceso de optimización realizado sobre cada mini-zona (micro-optimización), fue
posible constatar la relación existente entre el número de transformadores y la red asociada
a cada transformador, observando que un análisis acoplado entre la red y el transformador
permite encontrar una combinación óptima de ellos, es decir un mix capaz de minimizar
para cada mini-zona el costo de transformación, conductores y pérdidas. Siendo posible
mostrar, que dicho óptimo se obtiene en el mínimo del primer valle, que se encuentra en la
curva de costo total, la cual indica el costo de inversión más pérdidas en función del
número de transformadores instalados, donde tal costo se obtiene de la elección y ubicación
óptima de i transformadores (vía cluster), y donde para cada uno de ellos se determina la
red óptima, tanto en trazado como en elección de conductores. Así al realizar la
metodología para innumerables lanzamientos fue posible mostrar, que si al instalar un
transformador adicional, i+1 transformadores, existía un incremento en el costo total,
entonces el mínimo esta dado por la instalación óptima de i transformadores con sus
respectivas redes asociadas, situación que permite disminuir los tiempos de ejecución, al
acotar el espacio de búsqueda, ya que elimina la necesidad de encontrar los costos que se
obtendrían con la instalación de un número mayor a i+1 transformadores. En efecto, al
realizar la metodología sobre la comuna de Macul, para distintos valores de búsqueda,
entendiendo ésta como el número de iteraciones adicionales, luego del primer valle
encontrado en la curva de costos totales, no fue posible encontrar una mejoría significativa
en el costo final. Es decir, el aumento del espacio de búsqueda no trajo consigo la
disminución de costos, y por tanto no hubo presencia de nuevos mínimos en cada minizona.
También es importante destacar, la consideración de la red vial a la hora de realizar el
trazado, ya que esto por un lado evita el paso de redes a través de accidentes geográficos,
donde no existen redes viales (cerros, mesetas, etc.), y por otro lado permite la
determinación correcta de las redes, al considerar la conectividad real existente entre los
distintos consumos, logrando así su correcta valorización y posterior consideración en la
curva de costo total.
127
El procedimiento aquí propuesto si bien es no determinístico, es decir para los mismos
valores cada vez que es ejecutado no entrega necesariamente los mismos resultados, sí
presenta resultados bastantes similares cada vez que es empleado, valores cuya desviación
no debiese afectar al planificador en las diversas decisiones a tomar. Es así como para 20
lanzamientos de la metodología sobre la comuna de Macul, la desviación estándar del costo
total sólo representa el 0,39 % del costo promedio total para todas las ejecuciones, y en el
caso de Santiago para 10 ejecuciones representa el 0,11 % del costo promedio total,
permitiendo concluir la consistencia de sus resultados para la toma de decisiones.
En consideración, a la forma de solución planteada en la metodología de microoptimización, se puede inferir inmediatamente que tal mecanismo, al no considerar las
posibles ventajas de combinar zonas vecinas, puede ser perfeccionado. De esta
investigación, se pudo mostrar que tal perfeccionamiento se puede dar a través de dos
caminos, uno mediante la agrupación de consumos cercanos a través de los polígonos de
Voronoi y otro mediante la recombinación de redes vecinas. Para una mejor visualización
de las conclusiones, se presenta a modo de ejemplo el resumen de las metodologías de
macro-optimización aplicadas a Santiago.
Tabla 7.1: Metodologías de macro-optimización sobre Santiago41.
Micro-Optimización
Caso Base
Costo total (MM$)
Costo total + pérdidas
(MM$)
Número de
Transformadores (#)
Largo de Red (Km)
Capacidad Instalada
(MVA)
Tiempo de Ejecución
(min)
41
Macro-Optimización
Unión de
Diagrama de
Unión de
Diagrama de
Redes vía
Voronoi
Redes vía
Voronoi
Búsqueda
simplificado Vecindarios
Tabú
Polígonos de
Voronoi y
Búsqueda
Tabú
70.973
70.098
70.505
67.338
65.463
64.422
79.981
78.133
78.722
77.156
76.041
75.079
12.052
11.966
11.815
9.357
8.404
7.686
7.822
8.210
8.261
8.187
8.746
8.935
2.859
2.895
2.892
2.741
2.664
2.625
167
346
184
345
421
391
Las metodologías de Macro-Optimización incluyen el tiempo requerido para la Micro-Optimización, puesto
que esta constituye su input. Sólo el procedimiento “Diagrama de Voronoi simplificado”, prescinde del
tiempo adicional, puesto que emplea como input un proceso simplificado.
128
Mediante la utilización de los polígonos de Voronoi, fue posible agrupar a los consumos
por su característica de cercanía y con ello lograr una reducción de costos al aplicar sobre
cada polígono el proceso de micro-optimización, con lo cual se obtuvo para el caso de
Macul un ahorro cercano al 4 % y para el caso de Santiago uno de 2 % con respecto al
proceso de micro-optimización respectivo. Es importante mencionar que los polígonos se
forman a partir de puntos generadores, probándose en la presente investigación que estos
pueden provenir de la ubicación de los transformadores, ya sean obtenidos del proceso de
micro-optimización o de un proceso simplificado (sin consideración de la red), con el
consecuente ahorro de tiempo, en el caso de Santiago se cambia una ejecución de 176
minutos por una de 14 minutos, a los polígonos así obtenidos se les aplica, de igual forma,
el proceso de micro-optimización completo.
En cuanto a la recombinación de redes vecinas, esta metodología encuentra economías al
suministrar mediante una única red y por ende bajo un único transformador, a redes
aledañas, siempre y cuando esto sea posible. Abordándose el problema desde dos
perspectivas, una mediante la división de la zona de planificación en vecindarios, y en cada
uno de ellos, analizar las posibilidades de combinación, y otra, sin la realización de
división, sino que determinando las combinaciones factibles en toda la zona de
planificación a través de la búsqueda tabú. Tanto en el caso de Macul como su posterior
aplicación a Santiago, fue posible constatar la ventaja que presenta el análisis de un único
vecindario, puesto que evita la no consideración de combinaciones entre redes que
pertenecen a vecindarios distintos. Así, para el caso de Santiago, al utilizar vecindarios se
obtuvo un ahorro de 3,5 % y en el caso de un único vecindario el ahorro creció a un 4,9 %,
sin embargo se debe señalar que la metodología de mayor ahorro, al poseer un espacio de
búsqueda mayor, requiere más tiempo en su ejecución, necesitando 76 minutos adicionales
para encontrar la solución.
Se debe constatar, que el mejor resultado obtenido se produce al realizar la aplicación
secuencial del diagrama de Voronoi y la recombinación de redes a través de un sólo
vecindario. Con lo que es posible aprovechar tanto el abastecimiento de grupos de
consumos cercanos entre sí como los ahorros que se producen al unir redes vecinas en una
129
única red. De hecho el ahorro obtenido con este procedimiento en serie es de 7,4 % para el
caso de Macul y de 6,1 % para el caso de Santiago.
Finalmente, y en relación a la validez de los resultados encontrados, se debe considerar que
la presente investigación sólo determinó redes aéreas, y en cambio los estudios de
referencia para el gran Santiago, dados por los estudios de VAD 2004-2008, tanto de la
empresa distribuidora como de la autoridad consideran además redes subterráneas, por lo
que un parangón directo no es posible, pero sí lo es la verificación del orden de los
resultados obtenidos. En efecto, el número de transformadores y kilómetros de red
extraídos del modelo42 son 7.686 unidades y 8.935 km, respectivamente, tales valores para
los estudios de referencia son de 7.247 unidades y 9.050 km para el estudio de la
distribuidora y de 8.416 unidades y 9.075 km para el estudio de la autoridad. Lo que ratifica
la bondad de la metodología propuesta.
No se debe perder de vista, que el principal acierto de la metodología planteada, más allá de
los resultados numéricos, que pueden variar de acuerdo a la definición de precios y/o
expectativas de crecimiento, es la certeza de resolver un problema de gran tamaño, con la
consideración conjunta de redes y transformadores sobre una red vial que permite
determinadas conexiones, con lo cual el problema es solucionado sin la necesidad de
excesivas simplificaciones, en un tiempo razonable, toda vez que un ejercicio de
planificación en ningún caso necesita ser resuelto en forma instantánea. En particular, es el
planificador quien puede optar discretamente por el tiempo requerido en la solución, de
hecho el resultado de la micro-optimización para Santiago se consigue entre 167 y 170
minutos, siendo voluntad del planificador realizar el proceso de macro-optimización para la
disminución de costos, etapa que toma cerca de 200 minutos en ejecutarse. Por tanto, en tan
sólo tres horas es posible obtener una primera buena aproximación a la planificación desde
cero de una zona de gran tamaño, lo que representa la gran ventaja de la división en minizonas y de la metodología desarrollada.
42
Considerando como modelo final a la metodología que presenta un menor costo total, es decir al
procedimiento secuencial de diagrama de Voronoi y Recombinación Tabú de redes.
130
7.2
Trabajos Futuros
La optimización de una red de distribución eléctrica de gran tamaño constituye un
problema de gran complejidad, que no puede ser resuelto a través de métodos
determinísticos, por lo que necesariamente para su resolución se requieren de
simplificaciones y aproximaciones, situación que se ha podido constatar a lo largo del
presente trabajo. Bajo esta perspectiva, siempre existen posibilidades de mejora para lograr
una visión real de la empresa modelada y con ello dar una señal justa de precios tanto a
consumidores como a la empresa regulada, por lo que se proponen las siguientes líneas de
investigación para continuar el trabajo aquí planteado:
•
Consideración dinámica del ejercicio de planificación: Dentro de los supuestos de
desarrollo del algoritmo se encuentra la consideración estática del problema, lo que
significa determinar en el año base las instalaciones que abastecerán la demanda
durante todo el horizonte de estudio, ello producto que el crecimiento de la demanda
considerado es pequeño y por tanto si conductores y transformadores fueron
diseñados óptimamente para dicha tasa, son capaces de soportar el incremento de
demanda durante todo el período. Sin embargo si la tasa hubiese sido mayor, en la
práctica se requerirían instalaciones adicionales de refuerzo, ya sea nuevos
transformadores con la consiguiente re-configuración de la red y/o ampliaciones de
las secciones de la misma, efectos que no se encuentran incluidos en la metodología
propuesta. A fin de garantizar la generalidad de modelo sería importante realizar la
optimización dinámica, es decir indicar cuando deben ser llevadas a cabo las
inversiones, situación que aumenta la complejidad del problema dado que incluye la
relación inter-temporal de las decisiones, pero que constituiría un aporte en la
planificación de sistemas de distribución.
•
Consideración conjunta de la red de media tensión: Otro desarrollo importante y
desafiante es la realización de la optimización de la red de distribución completa,
esto es considerando tanto la media como la baja tensión. Así, un sistema con una
red de media tensión predominante, presenta un alto número de transformadores de
131
distribución y una red de baja tensión pequeña, en cambio una compañía con una
red de baja tensión dominante, posee transformadores de mayor capacidad y por
ende un menor número de ellos, lo que genera una mayor red de baja tensión.
Existiendo una multitud de posibles soluciones entre ambos casos, por lo que resulta
fundamental preguntarse acerca de la combinación óptima entre media tensión y
baja tensión, relación que al desacoplar el problema no es considerada, lo que hace
una línea atractiva de investigación la solución conjunta del problema de
planificación de sistemas de distribución.
•
Consideración de las instalaciones de generación distribuida: La irrupción de
medios de generación que inyectan su energía directamente sobre el sistema de
distribución, hace que surjan nuevas interrogantes con respecto a como considerar
su efecto en el valor de una empresa distribuidora. Por ejemplo, se hace necesario
considerar quien se hará cargo de las instalaciones necesarias para acceder a la
generación distribuida. Instalaciones tales como equipos de control, protecciones,
refuerzo de alimentadores, entre otros, deben ser debidamente remunerados, ya sea
por el generador distribuido o por la tarifa regulada.
Otro punto, es considerar las ventajas en la regulación de tensión y disminución de
pérdidas que trae consigo la generación distribuida, con lo cual, el valor presente del
costo de las pérdidas, necesariamente es menor si es que existen proyectos de
generación distribuida en la zona de planificación, haciéndose necesario,
posiblemente, a la hora de determinar las tarifas, conocer cuales son los posibles
lugares de generación distribuida y el tipo de instalaciones necesarias, de manera de
descontar tales ahorros de la tarifa y por ende no remunerar a la empresa
distribuidora por costos inexistes. En suma, al crecer la generación distribuida, se
vuelve no despreciable su consideración en la planificación de las redes de
distribución, puesto que son éstas, las encargadas de evacuar su energía, y las que
asumen sus eventuales costos y/o ahorros.
Se debe recalcar que el problema de planificación de redes de distribución, está abierto
tanto a su solución como modelación. Día a día los sistemas crecen en tamaño y en
132
normativas, por lo que las variables involucradas también lo hacen, lo cual conlleva a que
los investigadores constantemente exploren nuevas formas de planteamiento y rutas
alternativas de solución, en virtud de lo cual los trabajos futuros propuestos y la
metodología aquí desarrollada, sólo buscan ser un aporte y no agotan, en absoluto, la
exploración a la solución del complejo problema enfrentado.
133
BIBLIOGRAFIA
Adams, R.N y Laugton, M.A. (1974). Optimal Planning of Power Network Using
Mixed Integer Programming. IEE Proceedings, 121(2), 139-147.
Akabane, K., Nara, K., Mishima, Y. y Tsuji, K. (2002, junio). Optimal Geographical
Allocation of Power Quality Control Centres by Voronoi Diagram. Documento
presentado en 14th Power Systems Computation Conference, Sevilla, España.
Anders, G.J., Vainberg, M., Horrocks, D.J., Foty, S.M. y Motlis, J. (1993). Parameters
Affecting Economic Selection of Cable Sizes. IEEE Transactions on Power Delivery,
8(4), 1661-1667.
Aoki, K., Nara, K., Satoh, T., Kitagawa, M. y Yamanaka, K. (1990). New Approximate
Optimization Method for Distribution System Planning. IEEE Transactions on Power
Systems, 5(1), 126-132.
Berg, S.V. y Tschirhart, J. (1988). Natural monopoly Regulation: Principles and
Practice. Cambridge: Cambridge University Press.
Brauner, G. y Zobel, M. (1994). Knowledge Based Planning of distribution Networks.
IEEE Transactions on Power Systems, 9(2), 942-948.
Buller, F. y Woodrow, C. (1928). Load Factor-Equivalent Hour Value Compared.
Electrical World, 92(2), 59-60.
Carvalho, P.M.S., Ferrerira, L.A.F.M, Lobo, F.G. y Barruncho, L.M.F. (2000).
Distribution Network Expansion Planning Under Uncertainty: A Hedging Algorithm in
an Evolutionary Approach. IEEE Transactions on Power Delivery, 15(1), 413-416.
Crawford, D. M. y Holt, S.B. (1975). A Mathematical Optimization Technique for
Locating and Sizing Distributions Substations, and Deriving Their Optimal Service.
IEEE Transactions on Power Apparatus and System, 94(2), 230-235.
134
Chang, H.C. y Kuo, C.C. (1994). Network Reconfiguration in Distribution Systems
Using Simulated Annealing. Electric Power System Research, 29, 227-238.
Comisión Nacional De Energía. (2003). Bases para el cálculo de las componentes de
costo del valor agregado de distribución. Santiago, Chile: Ministerio de Economía.
Da Silva, E.L., Areiza, J.M., De Oliveira, G.C. y Binato, S. (2001). Transmission
Network Expansion Planning Under a Tabu Search Approach. IEEE Transactions on
Power Systems, 16(1), 62-68.
Díaz-Dorado, E., Cidras, J. y Miguez, E. (2002). Application of Evolutionary
Algorithms for the Planning of Urban Distribution Networks of Medium Voltage. IEEE
Transactions on Power Systems, 17(3), 879-883.
Díaz-Dorado, J.P. (1999). Herramientas para la planificación de redes de baja tensión
y media tensión urbanas. Ph.D. tesis, Departamento de Ingeniería Eléctrica,
Universidad de Vigo, España.
Díaz-Dorado, E., Cidras, J. y Miguez, E. (2003). Planning of Large Rural Low voltage
Networks Using Evolution Strategies. IEEE Transactions on Power Systems, 18(4),
1594-1600.
Dorigo, M., Maniezzo, V. y Colorni, A. (1996). The Ant System: Optimization by a
Colony of Cooperating Agents. IEEE Transaction on Systems, Man and CyberneticsPart B: Cybernetics, 26(1), 29-41.
Ferreira, L.A.F.M., Carvalho, P.M.S., Jorge, L.A., Grave, S.N.C y Barruncho, L.M.F.
(2001). Optimal Distribution Planning by Evolutionary Computation – How to Make it
Work. Transmission and Distribution Conference and Exposition IEEE/PES, 469-475.
Fawzi, T.H., Ali, K.F. y El-Sobki, S.M. (1983). A New Planning Model for Distribution
Systems. IEEE Transactions on Power Apparatus and System, 102(9), 3010-3017.
135
Garey, M.R. y Jonson, D.S. (1979). Computers and Intractability: A Guide to the
Theory of NP- Completeness. Nueva York: Freeman.
Glover, F. y Kochenbeger, G. editors. (2003). Handbook of Metaheuristics. EE.UU.:
Kluwer Academic Publishers.
Glover, F. (1995). Tabu Search Fundamentals and Uses. Technical Report, Graduate
School of Business, University of Colorado.
Gómez, J.F, Khor, H.M., De Oliverira, P.M., Ocque, L., Yusta, J.M., Villasana R. y
Urdaneta, J. (2004). Ant colony system Algorithm for the Planning of Primary
Distribution Circuits. IEEE Transactions on Power Systems, 19(2), 996-1004.
Gonen, T. (1986). Electric Power Distribution System Engineering. Nueva York:
McGraw-Hill.
Gonen, T. y Foote, B.L. (1981). Distribution System Planning Using Mixed Integer
Programming. IEE Proceedings, 128(2), 70-79.
Gonen, T. y Ramírez-Rosado, I.J. (1986). Review of Distribution System Planning
Models: A Model for Optimal Multistage Planning. IEE Proceedings 133(7), 397-408.
Gordon, A.D. (1981). Classification. Londres: Chapman and Hall.
Goswami, S.K. (1997). Distribution system Planning using branch exchange technique.
IEEE Transactions on Power Systems. 12(2), 718-723.
Gustafson, M.W. y Baylor, J.S. (1988). The Equivalent Hours Loss Factor Revisited.
IEEE Transactions on Power Systems, 3(4), 1502-1508.
Gustafson, M.W. y Baylor, J.S. (1989). Approximating the System Loss Equation. IEEE
Transactions on Power Systems, 4(3), 850-855.
Hindi, K.S. y Brameller, A. (1977). A Design of Low Voltage Distributions Networks:
A Mathematical Programming Method. IEE Proceedings, 124(1), 54-58.
136
Hsu, Y. y Chen, J.L. (1990). Distributions Planning Using a Knowledge-based Expert
System. IEEE Transactions on Power Delivery, 5(3), 1514-1519.
Huang, Y.C., Yang, H.T. y Huang C.L. (1996). Solving the Capacitor Placement
Problem in a Radial Distribution System Using Tabu Search Approach. IEEE
Transactions on Power Systems, 11(4), 1868-1873.
Khator, S. y Leung, L. (1997). Power Distribution Planning: A Review of Models and
Issues. IEEE Transactions on Power Systems. 12(3), 1151-1159.
Lee, K.Y. y El-Sharkawi, M.A. editors. (2004). Modern Heuristic Optimization
Techniques with Applications to Power Systems. EE.UU.: IEEE Power Engineering
Society.
Lo, K.L., y
Nashid, I. (1996). Interactive Expert System for Optimal Design of
Electricity Distribution Systems. IEE Proceedings, Generation, Transmission and
Distribution. 143(2), 151-156.
Mandal, S. y Pahwa, A. (2002). Optimal Selection of Conductors for Distribution
Feeders. IEEE Transactions on Power Systems. 17(1), 192-197.
Masud, E. (1974). An iterative Procedure for sizing and timing distribution substations
using optimizations techniques. IEEE PES Winter Meeting, pp.1281-1286.
Miguez, E., Cidras, J, Diaz-Dorado, E. y Garcia-Dornelas, J.L. (2002). An Improve
Branch Exchange Algorithm for Large Scale Distribution Network Planning. IEEE
Transactions on Power Systems, 17(4), 931-936.
Miranda, V., Ranito, J.V. y Proenca L.M. (1994). Genetic algorithms in Optimal
Multistage Distribution Network Planning. IEEE Transactions on Power Systems, 9(4),
1927-1923.
137
Montagnon, F.M., (1999). Planificación de la Expansión de Sistemas Eléctricos vía
algoritmos Genéticos. M.Sc. tesis, Departamento de Ingeniería Eléctrica, Pontificia
Universidad Católica de Chile.
Moreno, J., Moreno, R., Mocarquer, S. y Rudnick, H. (2006, noviembre).
Determinación de un Parque Óptimo de Transformadores para una Empresa Modelo
de Distribución. Documento presentado en III Congreso Internacional de la Región
Andina IEEE, Quito, Ecuador.
Nara, K., Satoh, T., Kuwabara, H., Aoki, K., Kitagawa M. y Ishihara, T. (1992).
Distribution System Expansion Planning by Multistage branch Exchange. IEEE
Transactions on Power Systems, 7(1), 208-214.
Nara, K., Hayashi, Y., Muto, S. y Tuchida, K. (1998). New Algorithm for Distributions
feeders Expansion Planning in Urban Area. Electric Power Systems Research, 46(3),
185-193.
Nara, K., OmI, H. y Mishima, Y. (2002, junio). Optimal Configuration of Power
Delivery System for Customized Power Supply Services. Documento presentado en 14th
Power Systems Computation Conference, Sevilla, España.
Okabe A., Boots, B. y Sugihara, K. (1992). Spatial Tessellations: Concepts and
Applications of Voronoi Diagrams. Chichester, Reino Unido.: John Wiley & Sons.
Paiva, P.C., Khor, H.M., Dominguez-Navarro, J.A., Yusta, J.M. y Urdaneta A.J. (2005).
Integral Planning of Primary – Secondary Distribution Systems Using Mixed Integer
Linear Programming. IEEE Transactions on Power Systems, 20(2), 1134-1143.
Papadimitriu, C.H. y Steiglitz, K. (1998). Combinatorial Optimization: Algorithms and
Complexity. Nueva York: Dover Publications Inc.
138
Peco, J.P. (2001). Modelo de Cobertura Geográfica de una Red de Distribución de
Energía Eléctrica. Ph.D. tesis, Departamento de Electrotecnia y Sistemas, Escuela
Técnica Superior de Ingeniería, Universidad Pontificia Comillas de Madrid, España.
Ponce De Leao, M.T. y Matos, M.A. (1995). Distribution planning with fuzzy loads.
International Transactions in Operational Research, 2(3), 287-296.
Ponnavaikko, M., Rao, K. y Venkata S.S. (1987). Distribution System Planning through
a Quadratic Mixed Integer Programming Approach. IEEE Transactions on Power
Delivery, 2(4), 1157-1163.
Ramírez-Rosado, I.J. y Gonen, T. (1991). Pseudo-dynamic Planning for Expansion of
Power Distribution systems. IEEE Transactions on Power Systems, 6(1), 245-254.
Ramírez-Rosado, I.J. y Bernal-Agustín, J. (1998). Genetic Algorithms Applied to the
Design of Large Power Distribution Systems. IEEE Transactions on Power Systems,
13(2), 696-703.
Ramírez-Rosado, I.J. y Bernal-Agustín, J. (2001). Reliability and Cost Optimization for
Distribution Network Expansion Using and Evolutionary Algorithm. IEEE Transactions
on Power Systems, 16(1), 111-118.
Ramírez-Rosado, I.J. y Domínguez-Navarro, J.A. (2004). Possibilistic Model Based on
Fuzzy Sets for the Multiobjetive Optimal planning of electric Power Distribution
Networks. IEEE Transactions on Power Systems, 19(4), 1801-1810.
Ramírez-Rosado, I.J. y Domínguez-Navarro, J.A. (2006). New Multiobjective Tabu
Search algorithm for Fuzzy Optimal Planning of Distribution Systems. IEEE
Transactions on Power Systems, 21(1), 224-233.
Rudnick, H., Sanhueza, R. y Harnisch, I. (1997). Reconfiguration of Electric
Distribution Systems. Revista Facultad de Ingeniería, Universidad de Tarapacá, Chile,
4, 41-48.
139
Sanhueza, R. (1994). Planificación de la Expansión de un Sistema de Distribución vía
Algoritmo de Descomposición de Benders. M.Sc. tesis, Departamento de Ingeniería
Eléctrica, Pontificia Universidad Católica de Chile, Chile.
Sanhueza, R., Rudnick, H. (1995, noviembre). Un algoritmo de descomposición para la
planificación multi años de sistemas eléctricos de distribución. Documento presentado
en Congreso Chileno de Ingeniería Eléctrica, Punta Arenas, Chile.
Singh, K., Philpott, A. y Wood, K. (2005). Dantzig-Wolfe Decomposition for Solving
Multistage Stochastic Capacity Planning Problems. University of Auckland, New
Zealand.
Systep e Inecon. (2004). Estudio para el Cálculo de las Componentes de Costo del
Valor Agregado de Distribución (VAD), Área Típica 1: Chilectra. Santiago, Chile:
Autor.
Synex, Mercados Energéticos y Jadresic Consulting. (2004). Estudio de Costos de
Componentes del Valor Agregado de Distribución (VAD), Área 1. Santiago, Chile:
Autor.
Temraz, H.K. y Salama, M.M.A. (2002). A Planning Model for Sitting, Sizing and
Timing Distribution Substations and Defining the Associate Service Area. Electric
Power Systems Research, 62(2), 145-151.
Tram, H.N. y Wall, L. (1988). Optimal Conductor Selection in Planning Radial
Distribution Systems. IEEE Transactions on Power Systems, 3(1), 200-206.
Thompson, G.L. y Wall, D.L. (1981). A Branch and Bound Model for Choosing
Optimal substation Locations. IEEE Transactions on Power Apparatus and System,
100(5), 2683-2687.
140
Vaziri, M., Tomosovic, K., Bose, A. y Gonen, T. (2001). Distribution Expansion
Problem: Formulation and Practicality for a Multistage Globally Optimal Solution. PES
Winter Meeting, 3, 1461-1466.
Voronoi, G.M. (1908). Nouvelles applications des parametres continus a la theorie des
formes quadratiques. deuxieme Memoire: Recherches sur les parallelloedres primitifs.
J. Reine Angew. Math., 134, 198-287.
Wall, D., Thomson, G. y Northcote-Green, J. (1979). An optimization Model for
Planning Radial Distributions Networks. IEEE Transactions on Power Apparatus and
Systems, 98(3), 1061-1065.
Wen, F. y Chang, C.S. (1997). Transmission Network Optimal Planning Using the Tabu
Search Method. Electric Power System Research, 42, 153-163.
Willis, H., Powell, R. y Vismor, T. (1985). A Method for Automatically Assesing Load
Transfer Cost in Substation Optimization Studies. IEEE Transactions on Power
Apparatus and Systems, 104(10), 2771-2778.
Willis, H., Tram, H. y Powell, R. (1987). Substation Sitting and Capacity Selection
Based on Diversity Maximization. IEEE Transactions on Power Systems, 2(3), 692699.
Yap C.K. (1987). Algorithmic motion planning. En Schwartz y Yap. (Ed.), Advances in
Robotics 1: Algorithmic and Geometric Aspects of Robotics (pp. 95-143). New Jersey,
EE.UU.: Lawrence Erlbaum Associates.
Youssef, H.K. y Hackam, R. (1988). Dynamic solution of Distribution Planning in
Intermediate Time Range. IEEE Transactions on Power Delivery, 3(1), 341-348.
141
ANEXOS
142
ANEXO A: COMPLEJIDAD ALGORITMICA
Para comprender la complejidad algorítmica y en particular lo relacionado con el tipo de
problemas NP-completos, a los que se hace referencia en la presente tesis, se deben tener
presentes algunas definiciones básicas43.
Un algoritmo es una secuencia ordenada de pasos (conjunto de reglas) que conduce a la
resolución de cualquier instancia de un problema específico. Esta secuencia debe ser
precisa, es decir el algoritmo debe expresarse sin ambigüedad, debe ser determinista, o sea
todo algoritmo debe responder del mismo modo ante las mismas condiciones, y finalmente
debe ser finita, esto es, debe finalizar en un número finito de pasos.
Otro concepto que se debe tener presente es el de complejidad algorítmica, el cual se refiere
a los recursos computacionales, que son necesarios para ejecutar un algoritmo en función
de los datos de entrada del problema, específicamente la complejidad se define como el
número de operaciones elementales requeridas en función de la entrada, para resolver el
problema en cuestión. Muchas veces encontrar a cabalidad el número de operaciones
necesarias es un proceso complejo y que no entrega demasiada información, ello dado a
que el algoritmo puede tener un determinado escenario en que no se utilicen todos sus
pasos (mejor caso) y otro en que todas las etapas sean utilizadas (peor caso), por lo cual se
suele determinar la cota superior de la complejidad de un algoritmo O(n), denominado
orden de crecimiento, como el número de operaciones requeridas en el peor de los casos
para solucionar un problema cuyo tamaño de datos en la entrada es n.
En términos matemáticos, sean F y G funciones definidas en el conjunto de los números
naturales, entonces F, G: N N, se establece que el orden de crecimiento de G es menor o
igual que el de F, lo que escribe como G=O(F), si existe una constante k > 0, tal que G(n) ≤
k F(n) para todo n perteneciente a N (con n suficientemente grande, dado que no importa lo
que suceda para valores pequeños). Por ejemplo:
G (n) = 45 ⋅ n 2 + 7 ⋅ n + n ⋅ log(n) + 1 ⇒ G = O(n 2 )
43
Para más información ver Papadimitriu y Steiglitz (1998)
(A.1)
143
La jerarquía de ordenes en forma creciente es O(1) ⊂ O(log(n)) ⊂ O(n) ⊂ O(nlog(n))
⊂ O(n2) ⊂ O(n3) ⊂ O(2n) ⊂ O(n!) ⊂ O(nn), de manera aclaratoria, se debe tener en
cuenta que O(F) no es una única función sino que es un conjunto de funciones, que acotan
superiormente la complejidad del algoritmo. Con esta definición de complejidad es posible
saber cuando un algoritmo F es más eficiente que otro G para resolver un mismo problema,
si F=O(G) pero G ≠ O(F) se dice que F es más eficiente que G.
El estudio de la complejidad algorítmica ha llevado a los investigadores a clasificar los
algoritmos en los siguientes grupos:
•
Problemas de clase P (Polynomial time): Son aquellos problemas para los cuales
existe un algoritmo que se encuentra acotado en forma polinomial, es decir que en
el peor de los casos existe una función polinomial con el tamaño n de las entradas,
que limita superiormente la ejecución del algoritmo, del tipo O(nk). Ejemplos
clásicos de este tipo de problemas son el problema del camino mínimo, que consiste
en encontrar el menor camino desde un vértice origen al resto de los vértices, y el
problema del ciclo de euler, que consiste en encontrar un ciclo que pase por cada
arco de un grafo sólo una vez.
•
Problemas de clase NP (Nondeterministic Polynomial time): Un problema es NP si
y sólo si puede resolverse mediante un algoritmo no determinístico en tiempo
polinomial, entendiendo como algoritmo no determinístico aquel que escoge en
forma arbitraria un determinado curso de acción cada vez que se le presentan una
serie de alternativas posibles. Es decir, que los problemas de clase NP son
verificables en tiempo polinomial, ellos es, que dada una solución factible para el
problema, encontrada luego de una secuencia de elecciones, se puede verificar que
es correcta en un tiempo polinomial del tamaño de la entrada, por tanto presenta una
etapa de elección dominada por cierta arbitrariedad y una etapa de comprobación.
La clase P es un subconjunto de la clase NP ya que se podría construir un algoritmo
que resolviera los problemas de la clase P, con las mismas dos etapas que se usan en
los problemas de la clase NP, sin embargo, el problema es que existen soluciones
acotadas polinomialmente para todos los problemas P, pero no para todos los de la
144
clase NP. Para que ambas clases fuesen iguales todos los problemas NP deberían ser
del tipo O(nk), situación que a la fecha es un problema abierto.
•
Problemas de clase NP-Completos: Un problema es NP-completo si todos los
problemas de la clase NP pueden reducirse a él, representan los problemas más
difíciles de la clase NP y posiblemente no forman parte de los problemas de
complejidad P (afirmación que aún no ha sido probada ni desmentida), dado que de
existir una solución polinómica para un problema NP-completo entonces todos los
problemas de NP también la tendrían. Ejemplos de este tipo de problemas son, el
problema del camino máximo, dado dos vértices de un grafo encontrar el camino de
mayor distancia que los une, y el problema del ciclo hamiltoniano, que consiste en
encontrar un ciclo simple que contiene a cada vértice del grafo.
145
ANEXO B: DESCRIPCION DE META-HEURISTICAS
Para entender que es una meta-heurística, el primer paso es comprender el término
heurística, vocablo que etimológicamente proviene del griego heuriskein que significa
encontrar o descubrir. En la actualidad dicho término se comenzó a utilizar con los inicios
de la inteligencia artificial, específicamente representan mecanismos sencillos que permiten
resolver problemas difíciles (NP, NP-completos), de manera relativamente fácil y rápida,
encontrando una buena solución para ellos, pero sin garantizar la obtención de una solución
óptima. Estas técnicas se pueden clasificar en heurísticas de:
•
Construcción: algoritmos que van agregando componentes a una solución parcial,
hasta que se logra obtener una solución que cumple todas las restricciones y que no
es posible mejorar.
•
Mejora: algoritmos que parten de una solución inicial factible, y buscan en la
vecindad de la solución, algún cambio posible, de manera que la solución actual
mejora, los cambios se realizan hasta que se cumple un determinado número de
iteraciones o cuando ya no se producen mejorías. En este tipo de algoritmos,
mención especial, merece el intercambio de ramas (Branch – Exchange) en la
planificación de sistemas de distribución, en particular, en lo referente a la
formación de redes radiales, el que consiste en la adición de un tramo de red, de
manera que se forme un ciclo en el trazado, para posteriormente quitar la mejor
rama que elimine tal ciclo.
•
Descomposición: algoritmos que dividen el problemas principal en subproblemas de
tamaño y dificultad menor, que luego de resolverlos al ir uniéndolos permiten tener
una solución al problema mayor, la técnica más conocida de descomposición es la
heurística divide y vencerás.
•
Reducción: algoritmos que consisten en identificar ciertas condiciones que debe
poseer la solución final, de forma de acotar el espacio de búsqueda, haciendo más
fácil el proceso de optimización.
146
Otro mecanismo heurístico que no se ciñe necesariamente a la clasificación anterior, y que
en la mayoría de las oportunidades actúa como complemento de algún otro procedimiento,
es el denominado sistema experto, el cual consiste en emular el conocimiento que tienen los
expertos humanos frente a un determinado problema, conocimiento que es representado por
un conjunto de reglas del tipo IF-THEN, las cuales son aplicadas por el computador para
resolver el problema en cuestión.
La característica de los heurísticos anteriores, es que su utilización e implementación va a
depender fuertemente del problema que buscan resolver, lo cual constituye una falencia,
dado el esfuerzo adicional que ello significa, no obstante en el último tiempo, han aparecido
algoritmos heurísticos que, en términos generales, son genéricos e independientes del
problema de optimización que intentan resolver, a este tipo de metodologías se les conoce
como meta-heurísticas. En particular Glover et al. (2003) las define como:
“Las meta-heurísticas son métodos que integran de diversas maneras,
procedimientos de mejora local y estrategias de alto nivel para crear un proceso capaz de
escapar de óptimos locales y realizar una búsqueda robusta del espacio de búsqueda. En su
evolución, estos métodos han incorporado diferentes estrategias para evitar la convergencia
a óptimos locales, especialmente en espacios de búsqueda complejos.”
Siendo sus principales ventajas, la versatilidad, esto es que son necesarias pequeñas
modificaciones para adaptar las meta-heurísticas a la resolución de distintos problemas, y la
aplicabilidad eficaz, es decir, que se puede aplicar a problemas difíciles encontrando buenas
soluciones en tiempos razonables. Su principal desventaja, es que no se puede conocer la
calidad de la solución encontrada, por tanto, no se puede saber que tan cerca se encuentra el
resultado encontrado del óptimo global del problema.
A continuación se explicarán brevemente las características fundamentales de las metaheurísticas que han sido citadas a lo largo de este trabajo, de forma de aclarar los aspectos
relevantes de los algoritmos genéticos, las colonias de hormiga, el temple simulado
(Simulated Annealing) y la búsqueda tabú.
147
B.1
Algoritmos Genéticos
Esta meta-heurística se basa en la teoría de la evolución de las especies, en la que se
sostiene que con el paso de las generaciones, sólo los genes de los individuos mejor
adaptados permanecen en el tiempo, mientras que la información de aquellos individuos
que no se pudieron adaptar desaparece junto con ellos. De esta manera, las especies logran
adaptarse a los cambios del ambiente y producto de la reproducción, sobrevivir a través de
los años.
Tomando en cuenta esta optimización natural de las especies, los investigadores han
aplicado el mismo procedimiento para resolver diversos problemas de optimización, para
ello, se debe crear una población inicial, compuesta por un número determinado de
individuos, donde cada uno de ellos representa una solución al problema, cada individuo
(solución factible) se encuentra codificado en un vector de unos y ceros (emulando la
cadena de ADN), la bondad de una solución está dada por una función denominada fitness,
que típicamente representa la evaluación del individuo en la función objetivo a optimizar, o
en el inverso de dicha función. Luego de esto, para que exista modificación al material
genético, es decir para que aparezca una nueva población de soluciones y se siga el proceso
de evolución natural, se realizan lo siguientes procedimientos:
•
Selección: este operador determina que individuos forman parte de una nueva
población, dicha elección se realiza, la mayoría de las veces en forma elitista,
considerando a los n mejores individuos de una población, de acuerdo a su función
de fitness. Otra forma de selección es asignando una determinada probabilidad de
selección en función del fitness de cada individuo, en la selección proporcional, la
probabilidad de escoger a un individuo para que forme parte de la nueva generación
es directamente proporcional a su valor de fitness. También se realiza selección por
torneo, en donde se escogen aleatoriamente dos individuos de la población, y se
deja para la nueva población el de mejor fitness, esta situación se repite hasta que se
seleccionan los n individuos de la nueva generación.
•
Cruce: este operador emula el proceso reproductivo de las especies, es decir, recoge
la información de dos individuos para generar uno nuevo, por tanto se crea una
148
nueva solución a partir de dos soluciones ya existentes. Es importante mencionar,
que no todos los individuos de una generación se cruzan, sino que como parámetro
de control se establece una probabilidad de cruce, la que típicamente es superior a
0,7. Existen varias formas de realizar este procedimiento, por ejemplo en el cruce
de punto simple, se escoge aleatoriamente una posición del vector que describe a un
individuo. Sea X la posición y N el largo del vector, el hijo 1 estará compuesto por
la información que va desde la posición uno a la posición X del padre 1 más la
información del padre 2 que va desde la posición X hasta la posición N,
análogamente el hijo 2 tendrá X información del padre 2 y N-X información del
padre 1.
Padre 1: 1 0 0 1 1 0 1 1
Padre 2: 0 1 1 1 1 1 0 0
Si X es igual a 3, entonces:
Hijo 1: 1 0 0 1 1 1 0 0
Hijo 2: 0 1 1 1 1 0 1 1
Muy parecido al anterior, es el cruce de multi-punto, en que se eligen más
posiciones de cruce, y por tanto los hijos tendrán más de un tramo de información
de cada padre. Otro cruce importante, es el cruce uniforme, en que cada variable
que conforma a los nuevos individuos se seleccionada aleatoriamente y con
igualdad de probabilidad desde los padres.
•
Mutación: este operador trata de emular los fenómenos aleatorios que se producen
en el proceso de evolución de las especies, modificando la estructura genética de los
individuos en forma aleatoria, cuyo objetivo es crear diversidad en la población, es
decir, en el caso de la solución de un problema de optimización ayuda a escapar de
óptimos locales. En términos prácticos lo que se realiza es cambiar el valor de uno
de los bit del individuo, es decir, si la posición escogida tiene un valor 1 se cambia
por un valor 0, no todos los elementos de un individuo son alterados, el parámetro
controlador es la probabilidad de mutación, la cual al igual que en la naturaleza es
pequeña, teniendo un valor del orden de 0,001 en la casi totalidad de los problemas
resueltos con esta metodología.
149
Con la aplicación sucesiva de los procedimientos antes señalados se logra emular el
proceso de evolución de las especies, produciendo sucesivamente nuevas generaciones que
toman lo mejor de la generación anterior, el proceso termina cuando se cumple un número
máximo de iteraciones o cuando el fitness de los individuos ya no mejora.
B.2
Temple Simulado (Simulated Annealing)
Esta meta-heurística se inspira en el proceso físico de templar un metal, esto es reblandecer
un metal a una temperatura elevada para luego enfriarlo lentamente, de manera de lograr
una cristalización óptima. Para comprender la analogía en cuestión, se debe tener en
consideración que en un material cualquiera, todas las partículas que lo componen se
encuentran con diferentes niveles de energía de acuerdo a una cierta distribución
estadística, el menor de dichos niveles de energía se denomina estado fundamental y se
presenta cuando la temperatura es de 0º K (-273º C). Así, la modelación teórica del proceso,
establece que si un metal se encuentra en un estado Si con un nivel de energía Ei, al
producirse una pequeña perturbación al estado original, y generarse un nivel de energía Ej,
el nuevo estado será Sj si la diferencia entre Ej-Ei es menor o igual a cero (disminución de la
energía producto de la perturbación), en caso que esto no suceda, el sólido pasará al estado
Sj con probabilidad
e
{(
− E j − Ei
)
k ⋅T
} , donde k es la constante de Boltzman y T es la
temperatura del sólido, es decir, durante el proceso de enfriamiento el sólido podrá pasar a
estados superiores de energía con mayor probabilidad en la medida que la temperatura es
alta, a medida que la temperatura decrece, esta probabilidad es menor, llegando un
momento en que los saltos sólo se producen hacia escenarios de menor energía. Por tanto, la
probabilidad de que el sólido se encuentre en el estado Si con una energía Ei es:
P ( X = Si ) =
⋅e
1
∑e
−Ej
− Ei
k ⋅T
(B.1)
k ⋅T
j
Teniendo en consideración lo anterior, se puede entender la analogía entre el proceso de
recocido o temple y la resolución de un problema de optimización combinatorial, señalando
las siguientes asociaciones, el estado Si representa una solución factible del problema, Ei es
150
el valor de la función objetivo evaluada en la solución, y la temperatura representa la
variable de control, ella maneja la probabilidad de aceptación de una solución que empeora
localmente la solución encontrada hasta la fecha. Así, el algoritmo simplificado de esta
meta-heurística es:
1. Se comienza el algoritmo con una solución factible S=S1. Se inicializan los parámetros
de control, esto es la temperatura inicial T = To y No, que representa el número de
configuraciones que se probarán a temperatura To.
2. Para cada configuración de 1 a No
a. Se realiza un cambio a la solución actual, y se evalúa la función objetivo,
obteniéndose Ej.
b. Si la solución mejora, entonces la solución actual es la solución asociada a
Ej, es decir S=Sj.
c. Si la solución empeora, entonces la solución actual es la solución asociada a
Ej, es decir S=Sj. Si y solo si se cumple que e
{(
− E j − Ei
)
k ⋅T
} > RANDOM (0,1),
de lo contrario la solución actual se mantiene S=S.
d. Se vuelve a 2 hasta que se realizan los No cambios.
3. Se determina si se cumple el criterio de parada. Sí se cumple, se finaliza el algoritmo,
sino se sigue con el paso 4. El criterio de parada suele ser un número determinado de
iteraciones, o un cierto número de iteraciones en que el valor de la función objetivo no
mejora.
4. Se determina To y No para la siguiente iteración y se vuelve al paso 2
Se observa que la dificultad principal, está en emular correctamente el proceso de
enfriamiento del metal, es decir en escoger una temperatura inicial y variarla en la medida
que avanza el proceso de optimización, ya que es dicha temperatura la que controla la
probabilidad de permitir empeoramientos en la solución, es decir la posibilidad de escapar
de mínimos locales, esta temperatura va disminuyendo, de manera de expandir en un
comienzo el espacio de búsqueda, mayor probabilidad de aceptar cambios a mayor
temperatura, y de refinar la solución al final del proceso, a menor temperatura existe menor
151
probabilidad de permitir cambios que empeoran la solución. Los parámetros principales del
proceso de enfriamiento y que se deben determinar para poder realizar el algoritmo son, la
temperatura inicial To, la temperatura final Tf, el número de transiciones Nk a la temperatura
Tk, y la tasa de variación de la temperatura Tk+1=G(Tk) Tk. Si bien existen, en la literatura,
metodologías aproximadas para cada uno de estos parámetros, se debe señalar, que su
correcta selección dependerá del problema en cuestión, por lo que una adecuada
sintonización de tales parámetros es un problema complicado, que la mayoría de las veces
se resuelve a prueba y error, siendo ésta, la principal desventaja del Temple Simulado, dada
su alta sensibilidad a la elección de parámetros.
B.3
Colonias de Hormigas
Este enfoque de solución de problemas de optimización pertenece a la corriente
denominada de inteligencia colectiva. La idea básica es que un sistema compuesto de una
multitud de agentes que siguen reglas simples, al actuar en forma cooperativa, pueden
lograr objetivos complejos, situación que se visualiza cabalmente en las colonias de
hormigas, en particular en su proceso de recolección de comida, donde ellas parten de
manera desordenada (aleatoria) en busca de alimento, y con el paso del tiempo forman
rutas óptimas para llegar a ellos. Para entender tal comportamiento, se debe tener presente
que las hormigas dejan un rastro químico, liberación de feromonas, que puede ser detectado
por el resto de las hormigas, así la elección de un determinado camino se hace en función
de la cantidad de feromona que puede percibir en la ruta, es decir se escogerá con mayor
probabilidad aquel camino que contenga una mayor concentración de feromonas, de no
existir feromona en la rutas, la primera elección se realiza de manera aleatoria, con lo cual
los caminos más prometedores (menores distancias) entre el hormiguero y la fuente de
alimento tendrán mayor concentración de feromonas, ello dado a que los caminos más
cortos son recorridos más rápidamente y por tanto el retorno de dicha hormiga comienza
antes, de esta forma el camino más corto tendrá un nivel de feromona ligeramente mayor al
resto de las rutas, con lo que tal camino es elegido con mayor probabilidad por las demás
hormigas de la colonia, este proceso también es ayudado por el ambiente, dado que la
feromona se evapora con el paso del tiempo, con ello la feromona de los caminos menos
152
prometedores disminuye progresivamente, porque son visitados cada vez por menos
hormigas. De esta forma, a la larga se consigue que toda la colonia se desplace por la ruta
de menor distancia para la recolección del alimento.
Figura B.1: Comportamiento de las hormigas
Su aplicación en optimización se realiza en problemas de grafos, en ellos cada hormiga
artificial tiene la misión de construir una solución del problema, cada adición a la solución
parcial construida, se realiza a través de una regla de decisión estocástica, que incluye
información heurística e información del resto de las hormigas. Luego de la construcción o
durante el proceso, las hormigas evalúan la solución y depositan feromona en las
conexiones utilizadas, que servirá de información para el resto de las hormigas artificiales.
Además se realiza la evaporación, es decir la eliminación de feromona en cada iteración del
problema, de manera de favorecer la exploración en nuevas zonas de búsqueda. Se debe
señalar también, que en el caso de las colonias artificiales de hormigas se aplican
decisiones globales, que permiten extraer información de la colonia completa, y tomar
medidas que favorezcan la resolución del problema, así se puede incluir la adición de
feromona adicional en el mejor camino encontrado en cada iteración.
El pseudo-código de esta meta-heurística es el siguiente:
1. Establecer la feromona inicial();
153
2. Mientras (el criterio de término no esté satisfecho)
a. Crear las hormigas de una colonia();
b. Para (cada Hormiga de la colonia);
{Mover hormiga ( )} hasta completar ruta;
Mover hormiga ( )
Para (todo el vecindario factible)
Calcular probabilidades de movimiento;
(τ ) ⋅ [η ]
∑ (τ ) ⋅ [η ]
α
Pij (t ) =
ij
α
il
Fin para
β
ij
β
, si j ∈ N ik
il
l∈N ik
Nodo seleccionado = seleccionar el movimiento ( )
Fin para
c. Actualizar feromona
d. Destruir hormigas
Fin mientras
3. Si se cumple criterio, entonces terminar. Típicamente el criterio de parada esta dado
por el número de colonias a evaluar, esto es por el número de veces que se repite el
paso 2.
Donde Pij es la probabilidad de pasar del nodo i al nodo j, τij es la feromona existente entre
el nodo i y el nodo j, ηij es la información heurística entre el nodo i y el j, esta información
típicamente es el inverso de la distancia (no necesariamente distancia euclidiana, sino que
una cierta métrica en el espacio de las propiedades) entre el nodo i y el nodo j, Nik es el
conjunto de nodos alcanzables desde el nodo i y que aún no han sido visitados por la
hormiga k. En tanto α y β constituyen parámetros que establecen un equilibrio entre la
importancia de la información heurística y de la información de la memoria dada por la
cantidad de feromona. Se debe señalar que la selección del movimiento y la actualización
de la feromona, dependerá de la estrategia escogida, así por ejemplo se puede incluir
feromona sólo en el mejor camino realizado por una hormiga de una colonia, o se puede
actualizar entre cada hormiga de una misma colonia, decisiones que dependerán del
planificador. Al igual que en la mayoría de los procedimientos heurísticos, se requiere de la
154
toma de decisión sobre un cierto número de parámetros, de los que finalmente dependerá la
calidad de la solución encontrada.44
B.4
Búsqueda Tabú
Dada la importancia de esta meta-heurística en el desarrollo de la presente tesis, las
características y aspectos fundamentales de su algoritmo, así como su ejecución y
principales supuestos se encuentran descritos en el cuerpo de este trabajo (ver 5.2.3
Resolución mediante búsqueda tabú).
44
Para más información consultar Dorigo et al (1996)
155
ANEXO C: ANALISIS DE CLUSTER
El análisis de cluster, también denominado análisis de conglomerados, es una técnica
estadística multivariante, cuyo objetivo es dividir un conjunto de elementos en grupos, de
manera que las características de los elementos pertenecientes a un mismo grupo sean muy
similares entre sí, situación denominada cohesión interna, y las características de elementos
pertenecientes a distintos grupos sean disímiles, situación conocida como aislamiento
externo del grupo. Para conocer tal similitud, se hace necesaria la existencia de medidas
que indiquen el grado de parecido o diferencia que existen entre dos elementos que se
quieren agrupar, estas medidas se pueden clasificar en medidas de proximidad y en medidas
de distancia, las primeras miden el grado de parecido entre dos objetos, de tal forma que
entre mayor sea su valor, mayor probabilidad existe que el método de cluster empleado los
clasifique en el mismo grupo, ejemplo de estas son los coeficientes de congruencia, de
correlación, de Jacard, de acuerdo simple, entre otros, en tanto que los segundos, miden el
grado de diferencia entre dos elementos de la muestra, por tanto entre mayor sea la medida,
menor es la probabilidad que la metodología los clasifique juntos, ejemplos de ésta son la
distancia euclidiana, la distancia métrica de Chebychev, la distancia manhatan, por
mencionar algunas (Gordon, 1981). Es importante señalar además, que las técnicas de
cluster han sido abordadas en dos grandes grupos:
C.1
Métodos Jerárquicos
Representan métodos sucesivos, en que durante una etapa, sólo uno de los elementos del
espacio a clasificar cambia de grupo. El algoritmo simplificado, suponiendo n objetos a
clasificar, es el siguiente:
1. Primero se calculan las distancias entre todos los pares de objeto, lo que equivale a
decir que se comienza el algoritmo con la existencia de n cluster {C1, ...,CN}.
2. Se buscan los dos cluster más cercano (de acuerdo a la medida de distancia
empleada), se unen y pasan a formar un único cluster.
3. Se repite el paso dos hasta que no quedan pares de comparación
156
Existen varios tipos de enlaces para realizar las uniones entre dos cluster, las más usadas
son:
•
Enlace simple: considera la distancia entre los elementos más cercanos de ambos
cluster.
•
Enlace promedio: considera la distancia promedio entre los elementos de ambos
cluster a combinar.
•
Enlace completo: considera la distancia entre los elementos más alejados de ambos
cluster.
Este método, si bien realiza la clasificación completa, no indica el número de cluster
localizados, sino que dada la partición realizada, es el tomador de decisión, quién
selecciona el número de cluster adecuado a su interés. No obstante, cabe mencionar un
criterio bastante utilizado en esta toma de decisión, criterio de Mojena, basado en la
distancia a la que se forma cada grupo, denominada distancia de aglomeración,
identificando aquellas iteraciones, en que tales distancias presentan grandes variaciones,
matemáticamente se tiene:
d j > X + k ⋅σ X
C.2
(C.1)
•
dj
: representa la distancia de aglomeración j.
•
X
: representa la media de las distancias de aglomeración.
•
σX
: representa la desviación estándar de las distancias de aglomeración.
•
k
: multiplicador, típicamente entre 2,5 y 3,5.
Métodos de Partición
Estos métodos clasifican al conjunto de datos en un número prefijado de grupos, de manera
que parten en una solución factible e iteran de acuerdo al algún criterio de búsqueda local.
En la presente investigación se utiliza, en particular, un tipo de técnica denominada kmeas, cuyo algoritmo simplificado, considerando n elementos a clasificar es:
157
1. Elección de k datos de los n a agrupar, estos constituyen los k centroides iniciales.
Es decir, un dato de entrada al algoritmo es el número de grupos a ubicar k.
2. Se calculan las distancias de los datos a cada uno de los centroides. Cada uno de los
datos es asignado al centroide más cercano, formándose k grupos
3. Para cada uno de los grupos se calcula el nuevo centroide como el valor medio de
todos los datos asignados a él.
4. Se repite el proceso 2 y 3 hasta que se satisface algún criterio de convergencia.
Se debe tener presente, que la distancia no representa necesariamente distancia espacial,
entendida como coordenadas (x,y) en el plano cartesiano de la geometría analítica, sino que
representa la distancia de los datos en el espacio de las propiedades y características de los
mismos. Es en este entendido, que la distancia más empleada a la hora de realizar k-means
es la distancia euclidiana, dada por:
2
d ( x, µ X ) = x − µ X
= ( x − µ X )T ⋅ ( x − µ X )T
•
d
: distancia euclidiana.
•
x
: vector de posiciones de los datos
•
µX
: valor medio de los datos (centroide).
(C.2)
El criterio de parada, esta dado por el mínimo entre un número máximo de iteraciones y la
variación de la distorsión entre dos iteraciones sucesivas. El número máximo de iteraciones
es un dato de entrada al algoritmo y dependerá de la convergencia presentada en el
problema a resolver. En tanto, que la distorsión es la suma de todas las distancias a su
respectivo centroide.
k
D = ∑ ∑ x − µi
2
(C.3)
i =1 x∈Ci
Donde k es el número de cluster, Ci es el cluster i-ésimo, y el criterio de parada será
D (n + 1) ≤ D (n)
(C.4)
158
Este algoritmo presenta una mayor convergencia que el método jerárquico, y es utilizado en
problemas en que el número de datos a clasificar es elevado, siendo ocupado en temas tan
variados como la biología, la sociología, la física, entre otros (Gordon, 1981), teniendo
como gran desventaja la elección a priori del número de agrupaciones a realizar.
159
ANEXO D: COSTO DE CONDUCTORES Y TRANSFORMADORES
Los costos usados tanto de transformadores como de conductores corresponden a valores a
diciembre del 2003, de manera que los resultados obtenidos puedan ser cotejados con la
última fijación tarifaria de distribución (VAD 2004-2008), no obstante constituyen entradas
al modelo y por tanto pueden ser modificados sin inconvenientes, teniendo sólo un carácter
referencial.
Tabla D.1: Listado de transformadores, capacidades y precios
Capacidad KVA
5
10
15
30
45
75
100
150
300
500
750
1000
Precio ($)
420.264
631.350
751.673
941.840
1.145.144
1.396.163
1.564.892
1.912.722
2.921.638
3.999.705
11.697.880
13.583.330
Costo de
Instalación
($)
57.987
76.141
86.488
102.843
120.327
141.914
178.793
208.706
295.473
388.187
1.097.123
1.272.286
Costo Total
($)
478.251
707.491
838.161
1.044.683
1.265.471
1.538.077
1.743.685
2.121.428
3.217.111
4.387.892
12.795.003
14.855.616
Tabla D.2: Listado de conductores de cobre desnudo
Sección (mm2) Precio ($/km)
16
25
35
70
12
259.827
416.532
527.742
1.118.166
1.892.592
Resistencia
(ohm/km)
1,12
0,732
0,523
0,261
0,152
Capacidad (A)
121
168
205
325
462
160
Tabla D.3: Listado de conductores de aluminio desnudo
Sección (mm2) Precio ($/km)
70
120
240
300
492.003
658.161
1.496.998
1.874.000
Resistencia
(ohm/km)
0,479
0,279
0,14
0,112
Capacidad (A)
260
370
538
625
Tabla D.4: Listado de conductores de aluminio preensamblado
Sección (mm2) Precio ($/km)
25
35
50
70
262.001
331.750
404.400
695.201
Resistencia
(ohm/km)
1,166
0,829
0,583
0,415
Capacidad (A)
260
370
538
625
161
ANEXO E: APLICACION PROCESO DE MICRO-OPTIMIZACION
En este anexo se presenta un ejemplo detallado del proceso de micro-optimización aplicado
a una mini-zona, en este caso el número de islas de la mini-zona es uno, por lo que la
topología de la isla es equivalente a la topología de la mini-zona.
1. Datos de entrada: posición y consumo de los clientes.
9400
9350
9300
9250
[m]
9200
9150
9100
9050
9000
8950
8900
3.955
3.96
3.965
3.97
3.975
3.98
3.985
[m]
3.99
3.995
4
x 10
Figura E.1: Ubicación de consumos en una mini-zona.
2. Etapa Previa:
2.1 Trazado de Calles
2.2 Asignación de cada cliente a su calle más cercana
162
9500
9400
9300
9200
[m]
9100
9000
8900
8800
3.94
3.95
3.96
3.97
[m]
3.98
3.99
4
4.01
4
x 10
Figura E.2: Trazado de calles y asignación de consumos
3. Proceso iterativo
3.1 Se comienza con un transformador en el centro de carga, se calcula el
transformador óptimo, el trazado y la red óptima, incluyendo las pérdidas,
para dicha ubicación, obteniéndose un costo total de $ 29.135.137
163
9400
9300
9200
[m]
9100
9000
8900
3.94
3.95
3.96
3.97
3.98
[m]
3.99
4
4.01
4
x 10
Figura E.3: Ubicación y red inicial
3.2 Se realiza el mismo procedimiento pero está vez ubicando dos
transformadores mediante k-means. De donde se obtiene un costo total de
$ 22.571.818
3.3 Se repite 3.2 agregando en cada iteración un nuevo transformador hasta que el
costo total de la iteración actual sea mayor que el de la iteración anterior. Para
el caso de tres ubicaciones se tiene un costo total de $ 20.504.002, en tanto
para el caso de cuatro ubicaciones su costo total es de $ 21.049.672. Notando
entonces que en el caso de tres localizaciones se produce un mínimo (el costo
tanto en la iteración anterior como en la posterior es mayor).
164
9400
9300
9200
9100
[m]
9000
8900
3.94
3.95
3.96
3.97
[m]
3.98
3.99
4
4.01
4
x 10
Figura E.4: Ubicación y red del primer mínimo encontrado
3.4 Si se encuentra un mínimo, se realizan B búsquedas adicionales, es decir se
repite 3.3 durante B iteraciones más, en este ejemplo se utiliza un valor de B
igual a tres, por lo tanto se realizan tres iteraciones posteriores a la iteración
cuatro, con lo que finalmente se prueban siete localizaciones para los
transformadores. El costo total en las etapas de búsqueda es $ 21.850.121,
22.054.774 y
$
$ 24.393.131 para las iteraciones cinco, seis y siete,
respectivamente. Notándose el comportamiento creciente de la función
objetivo luego de haber encontrado el mínimo (Figura E.6).
165
9400
9300
9200
[m]
9100
9000
8900
3.94
3.95
3.96
3.97
3.98
3.99
4
[m]
4.01
4
x 10
Figura E.5: Ubicación y red en la última iteración
4. Elección del óptimo: Se escoge la red que tenga menor costo total, se debe señalar
que en términos generales el primer mínimo que se encuentra es el mínimo global
de la función costo total, tal y como se muestra en este ejemplo (ver Tabla E.1 y
Figura E.6)
Tabla E.1: Evolución de la función de costo total
Costo
Número de
Transformadores
Transformadores
($)
1
4.387.892
2
6.434.222
3
6.364.284
4
8.485.712
5
10.229.397
6
11.217.596
7
12.377.930
Costo Redes
($)
Costo Postes
($)
6.682.436
6.186.815
5.493.175
4.788.479
4.468.437
3.858.079
4.343.621
6.169.980
5.901.720
6.438.240
6.348.820
5.633.460
5.722.880
6.259.400
Costo Pérdidas
Costo Total ($)
($)
11.894.829
4.049.061
2.208.303
1.426.661
1.518.827
1.246.199
1.412.181
29.135.137
22.571.818
20.504.002
21.049.672
21.850.121
22.044.754
24.393.131
166
7
3
Evolucion Costo
x 10
[$]
2.5
Costo Trafos
Costo Red
Costo perdidas
Costo poste
Costo total
2
1.5
1
0.5
0
1
2
3
4
5
6
7
Número de Transformadores
Figura E.6: Evolución de la función objetivo
5. Equilibrio de Red: Una vez que se conoce la solución óptima se procede a
recalcularla considerando el equilibrio de la red.
9400
9300
9200
[m]
9100
9000
8900
3.94
3.95
3.96
3.97
3.98
3.99
4
4.01
[m]
Figura E.7: Equilibrio de la red óptima
4
x 10
167
Es decir, se reubican los transformadores al interior de su propia red, de tal forma
que los flujos que salen de él, lo hagan de la manera más simétrica posible. En la
figura anterior, la nueva ubicación para los transformadores esta dada por los
triángulos de mayor tamaño, con ello se procede a recalcular los conductores
óptimos y las pérdidas asociadas a la nueva ubicación, logrando un costo total
final de $ 19.403.014, manteniéndose constante el costo de transformadores y el
costo de postes, pero mostrando un ahorro en el costo de red y en el costo de las
pérdidas, dado que sus nuevos costos son de $ 4.789.200 y $ 1.811.290,
respectivamente.
6. Datos de Salida, finalmente para cada mini-zona optimizada se obtiene:
o Ubicación, capacidad y costo de los transformadores usados.
o Trazado óptimo y conductores óptimos en la red asociada a cada
transformador.
o Evaluación de pérdidas de cada red.
o Asignación de clientes a cada transformador.
168
ANEXO F: COSTO MINIMO EN LA OPTIMZACION DE UNA MINI-ZONA
En este anexo se muestra, a modo de ejemplo, el comportamiento típico de la evolución del
costo total en una mini-zona cuando se adiciona un nuevo transformador en el proceso
iterativo de la micro-optimización. Se observa en todos los casos de ejemplo, que luego de
la obtención del mínimo, la adición de un nuevo transformador incrementa el costo total.
Por tanto, se puede asumir que dado el problema y formulación propuesta, encontrar un
mínimo indica altas probabilidades de ser el mínimo global para el procedimiento iterativo
desarrollado. En consideración que se trata de un procedimiento heurístico que de todas
formas no garantizará el óptimo global del problema de planificación, se opta por tomar el
primer mínimo como resultado del proceso de micro-optimización y así evitar tiempos
innecesarios que se producen al ampliar el espacio de búsqueda.
169
7
3
7
Evolucion Costo
x 10
8
[$]
[$]
Evolucion Costo
x 10
Costo Trafos
Costo Red
Costo perdidas
Costo poste
Costo total
7
2.5
6
Costo Trafos
Costo Red
Costo perdidas
Costo poste
Costo total
2
1.5
5
4
3
1
2
0.5
1
0
1
2
3
4
5
Número de Transformadores
7
[$] 2
6
0
7
x 10
1
2
3
4
5
6
7
Número de Transformadores
6
Evolucion Costo
[$]16
1.8
8
9
10
Evolucion Costo
x 10
14
1.6
12
1.4
10
1.2
Costo Trafos
Costo Red
Costo perdidas
Costo poste
Costo total
1
0.8
Costo Trafos
Costo Red
Costo perdidas
Costo poste
Costo total
8
6
0.6
4
0.4
2
0.2
0
1
2
6
16
3
4
5
Número de Transformadores
6
0
7
x 10
1
1.5
2
7
Evolucion Costo
3
[$]
2.5
3
3.5
4
4.5
Número de Transformadores
5
5.5
6
Evolucion Costo
x 10
[$]
14
2.5
Costo Trafos
Costo Red
Costo perdidas
Costo poste
Costo total
12
10
Costo Trafos
Costo Red
Costo perdidas
Costo poste
Costo total
2
8
1.5
6
1
4
0.5
2
0
1
2
3
4
5
Número de Transformadores
6
7
0
1
2
3
4
5
Número de Transformadores
Figura F.1: Ejemplos de la evolución del costo total
6
7
170
ANEXO G: RESULTADOS DE LA MICRO-OPTIMIZACION
En este anexo se presenta un resumen de las simulaciones llevadas a cabo en el proceso de
micro-optimización.
Tabla G.1: Simulaciones equilibrio de red
Lanzamiento
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Caso 1
1.915.868.486
1.913.864.348
1.906.295.104
1.898.273.931
1.880.259.698
1.915.533.246
1.915.392.226
1.906.087.288
1.912.671.177
1.897.075.493
1.909.780.204
1.894.187.485
1.902.515.472
1.901.192.837
1.905.007.141
1.899.845.910
1.918.636.374
1.923.085.978
1.908.678.780
1.899.646.844
Caso 2
1.819.211.042
1.828.334.867
1.832.120.157
1.833.232.594
1.843.371.158
1.820.042.332
1.831.159.158
1.835.060.121
1.838.797.878
1.840.474.314
1.820.073.227
1.839.395.779
1.837.076.387
1.839.113.483
1.827.007.437
1.833.870.373
1.831.409.165
1.837.760.035
1.838.682.217
1.836.962.215
Caso 3
1.814.417.744
1.814.401.933
1.809.303.832
1.823.131.953
1.833.629.354
1.825.299.580
1.810.900.718
1.835.284.128
1.823.501.787
1.818.447.722
1.814.360.503
1.823.147.005
1.817.932.071
1.824.850.808
1.819.594.060
1.810.123.631
1.834.507.060
1.820.942.119
1.818.704.757
1.826.043.357
Tabla G.2: Evolución de la solución para distintos tamaños de mini-zonas
Tamaño
50
80
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
Costo Total ($)
5.142.173.463
3.460.282.100
2.938.271.479
1.994.601.112
1.831.187.098
1.844.106.829
1.820.611.695
1.812.085.048
1.844.859.332
1.849.453.227
1.886.337.132
1.879.219.829
1.984.453.927
2.038.969.994
2.008.777.457
Tiempo (min)
16,05
8,83
6,73
3,47
2,91
3,10
3,51
3,71
4,40
5,24
6,60
7,44
8,92
10,65
15,37
171
ANEXO H: RESULTADOS APLICACIÓN GRAN SANTIAGO
En este anexo se presenta un resumen de las simulaciones llevadas a cabo al aplicar la
metodología propuesta sobre la zona de Santiago. Se debe señalar que en las tablas
siguientes, la columna “Costo Total” solo incluye las instalaciones y por tanto no incorpora
el costo de las pérdidas de energía.
Tabla H.1: Micro-optimización del gran Santiago - parte I
Lanzamiento
Costo Total ($)
Costo Trafo ($)
Costo Red ($)
Costo Poste ($)
Costo Pérdidas ($)
1
2
3
4
5
6
7
8
9
10
70.973.285.445
71.158.531.278
70.921.325.234
70.951.990.818
71.098.651.683
71.067.957.121
70.972.409.405
71.003.831.236
71.014.399.273
71.109.263.030
34.672.416.755
34.817.163.991
34.583.730.789
34.623.047.046
34.745.361.629
34.726.526.986
34.677.106.949
34.653.134.387
34.685.264.930
34.779.883.821
20.258.652.430
20.277.421.967
20.298.686.725
20.271.168.432
20.291.759.074
20.266.039.055
20.246.111.436
20.302.489.449
20.275.382.903
20.282.334.269
16.042.216.260
16.063.945.320
16.038.907.720
16.057.775.340
16.061.530.980
16.075.391.080
16.049.191.020
16.048.207.400
16.053.751.440
16.047.044.940
9.007.758.959
8.995.927.581
9.243.883.086
9.044.286.627
9.174.612.710
8.914.897.021
9.002.683.762
9.194.046.187
9.011.177.497
9.070.216.805
Tabla H.2: Micro-optimización del gran Santiago - parte II
Lanzamiento
1
2
3
4
5
6
7
8
9
10
Largo Red
(km)
7.823
7.834
7.821
7.829
7.832
7.837
7.826
7.826
7.828
7.825
Número de
Transformadores
12.052
12.022
11.971
12.065
12.030
12.109
12.063
12.001
12.023
12.053
Capacidad
Instalada
(MVA)
2.859
2.867
2.853
2.857
2.861
2.864
2.862
2.858
2.867
2.862
Pérdidas de
Energía
(MWh)
53.794
53.723
55.204
54.012
54.791
53.240
53.764
54.907
53.815
54.167
Tiempo
(min)
173,5
167,8
167,6
167,6
167,3
168,9
167,4
167,0
167,4
168,7