PROCEDIMIENTO PARA LAMINADO DE MASA.(ES2021393)
Anuncio
")
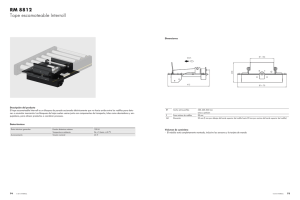
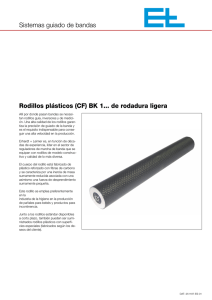
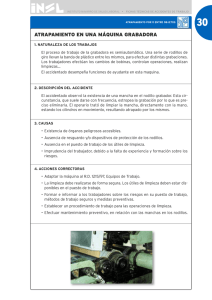
k REGISTRO DE LA PROPIEDAD INDUSTRIAL 19 k ES 2 021 393 kInt. Cl. : A21C 3/02 11 N.◦ de publicación: 5 51 ESPAÑA k TRADUCCION DE PATENTE EUROPEA 12 kNúmero de solicitud europea: 87810707.7 kFecha de presentación : 01.12.87 kNúmero de publicación de la solicitud: 0 270 497 kFecha de publicación de la solicitud: 08.06.88 B3 86 86 87 87 k 54 Tı́tulo: Procedimiento para extender masa. k 73 Titular/es: Seewer AG, Maschinenfabrik k 72 Inventor/es: Morgenthaler, Eugen k 74 Agente: Ibáñez González, José Francisco 30 Prioridad: 03.12.86 DE 36 41 286 Heimiswilstrasse 42 CH-3400 Burgdorf, Kanton Bern, CH 45 Fecha de la publicación de la mención BOPI: 01.11.91 45 Fecha de la publicación del folleto de patente: 01.11.91 Aviso: k k k En el plazo de nueve meses a contar desde la fecha de publicación en el Boletı́n europeo de patentes, de la mención de concesión de la patente europea, cualquier persona podrá oponerse ante la Oficina Europea de Patentes a la patente concedida. La oposición deberá formularse por escrito y estar motivada; sólo se considerará como formulada una vez que se haya realizado el pago de la tasa de oposición (art◦ 99.1 del Convenio sobre concesión de Patentes Europeas). Venta de fascı́culos: Registro de la Propiedad Industrial. C/Panamá, 1 – 28036 Madrid 1 2 021 393 DESCRIPCION La presente invención se refiere a un procedimiento para extender masa, en el que esta última se desplaza mediante una cinta transportadora de masa entre un rodillo fijo y otro móvil, y el rodillo móvil, después de cada paso de la cinta de masa a extender entre los rodillos, se acerca al rodillo fijo gracias a un órgano regulable, desplazándose ası́ en una distancia definida, de modo que el espacio entre los rodillos disminuye con cada paso de la masa. Para trabajos sencillos de extender masa, en los que sólo se pretende alcanzar grosores finales relativamente grandes de la cinta de masa a extender, se conocen ya máquinas para extender masa con un accionamiento fijo de la cinta transportadora. Si con estas máquinas se quieren obtener cintas finas de masa, hay que emplear mucho tiempo en determinar los pasos a seguir para regular el rodillo móvil. Para el operario es problemático reproducir los valores hallados porque a menudo se cometen errores en la regulación. Por otra parte, se conocen máquinas para extender masa con un accionamiento regulable de las cintas transportadoras, por ejemplo las descritas en la solicitud de patente europea n◦ 127583. Con estas máquinas para extender masa se pueden realizar también trabajos esmerados de extensión de masa, siendo condición previa que un operario supervise el desarrollo del trabajo y adecúe la velocidad óptima de la cinta introductora o que esto se realice mediante costosos dispositivos de medición y regulación, tal como se describe en la patente antes mencionada. El objetivo de la presente invención es proporcionar un procedimiento -según se mencionó al comienzo- que permita obtener las ventajas de la máquina para extender masa conocida por la patente arriba indicada, sin que se requieran tantos dispositivos técnicos, para poder fabricar ası́ una máquina para extender masa mucho más económica. La modificación del espacio entre rodillos, en función de los pasos de regulación, se debe poder adaptar de manera óptima al tipo de masa, al estado de la masa, etc. Estos objetivos de la invención se consiguen mediante las caracterı́sticas mencionadas en la reivindicación independiente 1. Una forma de realización preferible resulta de la reivindicación dependiente. A continuación se describe, con ayuda de los dibujos adjuntos, un ejemplo de realización de la invención y su funcionamiento. Las figuras representan lo siguiente: La Figura 1 es una vista lateral esquemática de una máquina automática para extender masa. La Figura 2 es la máquina de la Figura 1 vista en planta superior. La Figura 3 es una vista del accionamiento de los rodillos, estando el rodillo superior en una posición elevada. La Figura 4 es una vista equivalente a la Figura 3, con la diferencia de que el rodillo superior se encuentra en una posición descendida. La Figura 5 es una vista en alzado lateral del accionamiento de los rodillos según la Figura 3. La Figura 6 es un haz de curvas representando 2 5 10 15 20 25 30 35 40 45 50 55 60 65 2 la distancia entre rodillos en función de los pasos de regulación. La Figura 7 es un diagrama de bloques de la electrónica de gobierno. La Figura 8 es una vista de la unidad indicadora y de mando de la máquina para extender masa. De acuerdo con la Figura 1, la máquina para extender masa (1) se compone de un soporte (2) en el que está previsto un elemento central (3) con las carcasas (4) de los mecanismos para el accionamiento de los rodillos (5,6). Dos estructuras portantes (7,8) para las cintas transportadoras de masa (9,10) están fijadas en las carcasas (4). Las cintas transportadoras (9,10) se desplazan sobre los rodillos transportadores exteriores (11,12). Normalmente, la cinta de salida se mueve más rápido que la cinta de entrada. En las carcasas (4) de los mecanismos se encuentran también dispositivos (13,14) para protección de las manos. La Figura 2 es una vista en planta superior de la máquina para extender masa de la Figura 1. En las Figuras 3 y 4 se aprecia el mecanismo (4) de accionamiento de los rodillos, en el que, según la Figura 3, el rodillo móvil superior (6) se encuentra en una posición elevada, es decir, permite un gran espacio entre rodillos, y según la Figura 4 el rodillo superior (6) está en una posición descendida, permitiendo un espacio menor entre el rodillo inferior (5) y el rodillo superior (6). El rodillo superior (6) está montado en una palanca (16) que pivota alrededor de un centro de giro (15). En el extremo (17) de la palanca (16) opuesto al centro de giro (15), se ha montado un husillo (19) que se acciona por medio de un motor paso a paso (18). En lugar del motor paso a paso se podrı́a emplear también, por ejemplo, un motor eléctrico de corriente contı́nua con indicador de incrementos. Un motor (21), que puede rotar alrededor de un centro de giro (20) junto con un mecanismo (51), acciona los rodillos inferior y superior (5,6) por medio de una correa dentada (22) guiada por un rodillo de guı́a (23). Con el motor (21) se accionan también las cintas transportadoras de masa (9,10). El mecanismo (51) del motor (21) está conectado con la parte central de la palanca (16) a través de un varillaje regulable (24), con el cual se puede mantener la tensión necesaria de la correa dentada (22). El motor paso a paso (18) para la regulación del espacio entre rodillos se gobierna mediante un microprocesador. El árbol de salida (25) del mecanismo (51) del motor (21) está conectado con una rueda dentada (26) por la que se desplaza la correa dentada (22). A través de sus ejes (27,28), los rodillos inferior y superior para extender la masa también están conectados cada uno con una rueda dentada (29,30) por las que se desplaza la correa dentada (22). Esta disposición tiene la ventaja de que una única correa dentada (22) rodea los rodillos inferior y superior (5,6) y la rueda dentada (26) conectada con el árbol de salida (25) del mecanismo (51). En la Figura 5 se aprecia en alzado el mecanismo (4) de accionamiento de los rodillos de la Figura 3. Según se representa, el rodillo superior para masa (6) está en su posición elevada y el espacio (X) entre rodillos es máximo, lo que co- 3 2 021 393 rresponde a la posición inicial del procedimiento para extender la masa. En la figura, parcialmente en sección, se aprecia también el cojinete (31) del eje motriz (28) del rodillo superior para masa (6) y el cojinete (32) del varillaje (24). En la Figura 6 se representa el espacio en mm entre rodillos, como variable dependiente, en función de los pasos de regulación. Se ha representado un haz de curvas (a-i). Según el tipo de masa, por ejemplo hojaldre, pastaflora, etc, y el estado de la masa, por ejemplo frı́a, etc, una de las curvas (a-i) para el movimiento de los rodillos se selecciona mediante las teclas de una unidad indicadora y de mando en la electrónica de gobierno de la máquina automática para extender masa, controlando ası́ un microprocesador de la electrónica de gobierno al motor paso a paso (18) para la regulación del espacio entre los rodillos. La proporción entre un espacio entre rodillos y el inmediatamente menor se denomina “grado de laminado”, y disminuye con la extensión progresiva de la masa. Esta proporción puede disminuir con cada paso o, de forma alternativa, seguir igual durante por lo menos dos pasos o disminuir después del paso precedente. Al principio se emplean grados de laminado mayores, y conforme se va extendiendo la masa, grados menores. Si la máquina se rige por la curva (a) se requiere el mı́nimo de pasos para extender la masa, y si se elige la curva (i) se emplea el máximo de pasos. Sin embargo, todas las curvas tienen grados de laminado descendentes. Entre estas curvas máximas y mı́nimas se puede elegir una curva (b-h) que se adapte a la masa. En la Figura 7 se representa un diagrama de bloques de la electrónica de gobierno. Esta electrónica de gobierno para la regulación del espacio entre rodillos comprende, básicamente, una placa de circuitos (34) del microprocesador, una placa (35) de circuitos de entrada/salida y una placa (36) de circuitos Front. La placa de circuitos del microprocesador (uP-Print) consta del microprocesador (37), un codificador de direccio- 5 10 15 20 25 30 35 40 4 nes (38), una memoria fija programable (PROM) (39), una memoria de programación para el usuario (memoria de acceso directo o RAM) (40), conectada con los tres elementos antes mencionados, una baterı́a de alimentación (41) para la RAM y una alimentación (42). Los elementos (37,38,39) están conectados con las salidas (42’) y las entradas (43) de la unidad de entrada/salida (I/O-Print) (35). Las salidas (42’) y (43) están conectadas con un enchufe de conexión, respectivamente (46,47), a través de una separación galvánica, respectivamente (44,45), por ejemplo un optoacoplador. Los elementos (37,38,39) están conectados, además, con una unidad indicadora y de mando (48). En la entrada (43) se registra, por ejemplo, la señal de una barrera óptica en el sentido de que la cinta de masa ha pasado entre los rodillos. Se pueden memorizar diferentes operaciones para la regulación de los pasos que se ajusten a los tipos de masa, y el usuario las puede recuperar en caso necesario. En la Figura 8 se aprecia la unidad indicadora y de mando (48) de la electrónica de gobierno. Consta de un dispositivo para la indicación de los datos (display) (49) y varias teclas (50) mediante las cuales se pueden utilizar 20 programas. Entre otras cosas, se pueden programar doce curvas de laminado diferentes, el espacio inicial entre los rodillos y el espacio final entre los rodillos. El control (microprocesador) calcula los pasos que ha de realizar el rodillo superior móvil (6) y transmite las órdenes correspondientes al motor paso a paso (18) de los rodillos. El cálculo se realiza partiendo del espacio final entre los rodillos. El espacio final entre los rodillos se puede adaptar a las modificaciones de la masa sin que estas correcciones se integren en el programa de forma permanente. La secuencia de teclas para la modificación del espacio final entre los rodillos es (51’,52) ó (53,54). 45 50 55 60 65 3 5 2 021 393 REIVINDICACIONES 1. Procedimiento para extender masa, en el que la masa, por medio de una cinta transportadora de masa, pasa entre un rodillo fijo y otro móvil que se encuentran a cierta distancia entre sı́, y en el que, después de cada paso de la masa entre los rodillos, el rodillo móvil se acerca en una distancia definida al rodillo fijo mediante un órgano regulable y controlable, de modo que la distancia entre los rodillos disminuye de forma 5 10 15 20 25 30 35 40 45 50 55 60 65 4 6 regulable después de cada paso de la masa, caracterizado porque la proporción entre una distancia entre rodillos y la inmediatamente menor disminuye después de cada paso o se mantiene igual durante por lo menos dos pasos, disminuyendo de nuevo a continuación. 2. Procedimiento, según la reivindicación 1, caracterizado porque el órgano controlable de regulación se gobierna mediante electrónica programable. 2 021 393 5 2 021 393 6 2 021 393 7 2 021 393 8 2 021 393 9 2 021 393 10