UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
Anuncio

UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
UNIANDES
FACULTAD DE SISTEMAS MERCANTILES
CARRERA DE SISTEMAS
Proyecto de investigación previo a la obtención del Título de
INGENIERO EN SISTEMAS E INFORMÁTICA
TEMA: Aplicación Android para el control de dispositivos de movilidad usadas en
la Asociación ASOPLEJICAT.
AUTOR: Rodríguez Moya Fernando Andrés
ASESOR: Ing. Culque Toapanta Walter Vinicio
Ambato – Ecuador
2016
CERTIFICACIÓN DEL TUTOR
Ing. Walter Vinicio Culque Toapanta, en calidad de Asesor de proyecto de investigación,
designado por disposición de Cancillería de la Uniandes, certifica que el señor
FERNANDO ANDRES RODRIGUEZ MOYA, egresado de la escuela de Sistemas
Mercantiles, ha culminado con su trabajo de Tesis de Grado, con el tema: “Aplicación
Android para el control de dispositivos de movilidad usadas en la Asociación
ASOPLEJICAT”, elaboró su trabajo de grado bajo los requerimientos académicos de
orden técnico, metodológico y validez práctica de UNIANDES.
De la misma manera autorizo que la presente Tesis de Grado sea sometida a presentación
pública y evaluación por parte del tribunal evaluador que se designe.
Atentamente,
Ing. Culque Toapanta Walter Vinicio
ASESOR
RESPONSABILIDAD DE AUTORIA DE TESIS
Yo, FERNANDO ANDRES RODRIGUEZ MOYA, declaro en forma libre y voluntaria
que el presente Trabajo de Grado, que versa sobre el tema: “Aplicación Android para el
control de dispositivos de movilidad usadas en la Asociación ASOPLEJICAT”, así como
las expresiones vertidas en la tesis son de mi autoría. En consecuencia, asumo la
responsabilidad de la originalidad y el cuidado respectivo al remitirme a las fuentes
bibliográficas.
En igual forma, reconozco a la Universidad Regional Autónoma de los Andes la cesión de
derechos del mismo, con carácter exclusivo, para que se dé el uso que se estime pertinente.
Atentamente,
Rodríguez Moya Fernando Andrés
AGRADECIMIENTO
A Dios por darme la vida salud fortaleza paz en todos los problemas que he pasado en la
vida A Jesús por ser mi guía A la Virgen del perpetuo Socorro por darme sosiego a mis
padres hermanos a mis profesores amigos que siempre estuvieron a mi lado y a las demás
personas que cruzaron por mi vida llenándome de experiencia tristezas alegrías sueños
esperanzas y derrotas las cuales he aprendido a conllevar y superarlas y decir simplemente
GRACIAS.
DEDICATORIA
Dedico este trabajo a Dios a Jesús a mi Virgencita del perpetuo Socorro a mis padres
hermanos abuelitos, todos los que confiaron en mi para ser la persona que ahora soy los
cuales me digieron siempre lucha hasta el final y todo llévalo con una sonrisa. “hazlo todo
después haz más”.
ÍNDICE GENERAL
PORTADA
CERTIFICACIÓN DEL TUTOR
RESPONSABILIDAD DE AUTORIA DE TESIS
RESUMEN EJECUTIVO
ABSTRACT
INTRODUCCIÓN .................................................................................................................. 1
Objetivos................................................................................................................................. 4
Objetivo General..................................................................................................................... 4
Objetivos Específicos ............................................................................................................. 4
Idea a Defender ....................................................................................................................... 5
Justificación ............................................................................................................................ 5
CAPÍTULO I .......................................................................................................................... 7
MARCO TEÓRICO ............................................................................................................... 7
1.1 Introducción ...................................................................................................................... 7
1.2 Historia de los dispositivos inteligentes ........................................................................... 8
1.3 Mercado de los dispositivos inteligentes .......................................................................... 8
1.4 Discapacidad ................................................................................................................... 10
1.5 Sistemas operativos para dispositivos inteligentes ......................................................... 10
1.5.1 Desarrollando para rim ................................................................................................ 11
1.5.2 Android ........................................................................................................................ 11
1.6 Aplicaciones android ...................................................................................................... 12
1.6.1 Características .............................................................................................................. 13
1.6.2 Versiones de la plataforma .......................................................................................... 13
1.6.3 Primeras versiones ....................................................................................................... 14
1.6.4 Arquitectura ................................................................................................................. 24
1.6.5 Sistemas operativos ..................................................................................................... 25
1.6.6 Lenguajes de programación ......................................................................................... 25
1.7 APP Inventor .................................................................................................................. 26
1.8 Arduino ........................................................................................................................... 27
1.9 Programa arduino ........................................................................................................... 28
1.10 Tarjeta arduino.............................................................................................................. 29
1.11 Bluetooth ...................................................................................................................... 30
1.12 Comunicación vía bluetooth ......................................................................................... 30
1.12.1 Configuración bluetooth al app inventor ................................................................... 32
1.13 Motores eléctricos......................................................................................................... 34
1.14 Baterías ......................................................................................................................... 37
1.15 Batería motor corriente continúa .................................................................................. 38
1.16 Inversor de voltaje ........................................................................................................ 40
1.16.1 Parámetros de rendimiento ........................................................................................ 41
CAPÍTULO II ....................................................................................................................... 42
Marco metodológico ............................................................................................................. 42
2.1 Caracterización del sector. .............................................................................................. 42
2.2 Descripción procedimiento metodológico. ..................................................................... 42
2.2.1 Modalidad de investigación. ........................................................................................ 42
2.2.2 Por los objetivos ......................................................................................................... 43
2.2.3 Por el lugar .................................................................................................................. 43
2.2.4 Por la naturaleza .......................................................................................................... 43
2.2.5 Por el alcance. .............................................................................................................. 43
2.2.6 Por la factibilidad ........................................................................................................ 44
2.3 Población y muestra. ...................................................................................................... 45
2.3.1 Población ..................................................................................................................... 45
2.3.2 Criterios de inclusión y exclusión ............................................................................... 45
2.3.3 Muestra ........................................................................................................................ 45
2.4 Diseño de técnicas e instrumentos de recolección de información. ............................... 54
2.5 Conclusiones parciales…………………………………………………………………54
CAPÍTULO III ..................................................................................................................... 55
3. MARCO PROPOSITIVO................................................................................................. 55
3.1 Tema...………………………………………………………………………………….55
3.2 Objetivo...………………………………………………………………………………56
3.2.1 Objetivo general………………………..…………………………………………….56
3.2.1 Objetivos específicos……………….………………………………………………..56
3.3 Fundamentación ............................................................................................................. 55
3.4 Desarrollo de la Propuesta .............................................................................................. 56
3.5 fuentes de alimentación .................................................................................................. 58
3.6 Programa arduino ........................................................................................................... 59
3.7 Programa app inventor.................................................................................................... 64
3.7.1 Opción diseño de la app inventor ................................................................................ 67
3.7.2 Opción diagrama de bloques de la app inventor.......................................................... 69
3.8 Configuración del módulo bluetooth .............................................................................. 72
3.8.1 Conexión android y bluetooth ..................................................................................... 72
3.9 Motores ........................................................................................................................... 76
Conclusiones......................................................................................................................... 80
Recomendaciones ................................................................................................................. 81
Bibliografía
ANEXOS
Índice de Tablas
Tabla 1. Población…………………………………...……………………………..….......45
Tabla 2. Criterios de inclusión y exclusión………….…………………………….....…....45
Tabla 3. Tiene usted algún tipo de discapacidad……………………………...……...........46
Tabla 4. Qué tipo de discapacidad tiene……….………………………………………......47
Tabla 5. A qué parte del cuerpo afecta su discapacidad ……………………………..……48
Tabla 6. Utiliza usted silla de ruedas……………………………………………………....49
Tabla 7. Qué tipo de silla de ruedas utiliza usted ………………………….……………...50
Tabla 8. Cuál es el principal factor que limita su movilidad en la silla de ruedas…….......51
Tabla 9. Cree usted que el uso de la tecnología puede contribuir a mejorar la calidad de vida
de las personas que usan sillas de ruedas……………………………………………….....52
Tabla10.Usted maneja dispositivos electrónicos como celulares, tablets, entre otros
dispositivos inteligentes …………………………………………………………………...53
Tabla 11. Especificaciones de la Silla de Ruedas Modelo SC155. ...................................... 57
Tabla 12. Materiales para el prototipo. ................................................................................. 57
Tabla 13. Descripción de Motores y Servomotores ............................................................. 76
Tabla 14.Tabla de presupuesto……..………………………………………………………79
Tabla 15.Tabla de materiales…………………………………………….…………..…….79
Índice de Figuras
Figura 1. Diagrama de diseño del App Inventor. ................................................................. 26
Figura 2. Diagrama de bloques del App Inventor. ............................................................... 26
Figura 3. Programa Arduino 1.5.7 ........................................................................................ 28
Figura 4. Arduino Uno ......................................................................................................... 29
Figura 5. Conexión Arduino y Android. .............................................................................. 31
Figura 6. Conexión Arduino al módulo Bluetooth. .............................................................. 32
Figura 7. Conexión Android mediante el módulo Bluetooth. .............................................. 33
Figura 8. Diagrama de bloques de la configuración Bluetooth ............................................ 33
Figura 9. Diagrama de bloques para configuración del control ........................................... 34
Figura 10. Motor Trans-eje................................................................................................... 35
Figura 11. Servomotor para control de los motores. ............................................................ 35
Figura 12. Posición de los servomotores .............................................................................. 36
Figura 13. Componentes de los servomotores ...................................................................... 36
Figura 14. Señal de Pulsos para el servomotor ..................................................................... 37
Figura 15. Batería para el motor LifMaster 8360 ................................................................. 38
Figura 16. Motor de corriente continua ................................................................................ 39
Figura 17. Botones de Programación ................................................................................... 39
Figura 18. Interruptor y Conexión al Motor ........................................................................ 40
Figura 19. Inversor de Voltaje .............................................................................................. 41
Figura 20. Silla de Ruedas .................................................................................................... 56
Figura 21. Baterías para el Motor Trans – Eje. .................................................................... 58
Figura 22. Opción Herramientas de Arduino ....................................................................... 59
Figura 23. Componentes físicos del Arduino UNO ............................................................. 60
Figura 24. Código del programa ........................................................................................... 61
Figura 25. Aplicación App - Diseño ..................................................................................... 64
Figura 26. Aplicación App - Bloques ................................................................................... 65
Figura 27. Conexión entre los dos dispositivos .................................................................... 65
Figura 28. Código de barras ................................................................................................. 66
Figura 29. Traslado del código de barras al dispositivo Android ......................................... 66
Figura 30. Aplicación real del AppInventor ......................................................................... 67
Figura 31. Pantalla de Diseño ............................................................................................... 67
Figura 32. Paletas y Componentes ....................................................................................... 68
Figura 33. Elementos del diagrama de bloques .................................................................... 69
Figura 34. Inicio del diagrama de bloques ........................................................................... 70
Figura 35 conneccion Vía bluetooth .................................................................................... 71
Figura 36. Creación de la variable velocidad ....................................................................... 71
Figura 37. Comunicación Bluetooth – Módulo HC-06 ........................................................ 73
Figura 38. Aplicación Android hacia la silla de ruedas ........................................................ 73
Figura 39. Aplicación terminada .......................................................................................... 74
Figura 40. Prototipo del Circuito Control............................................................................. 74
Figura 41. Transferencia del Programa ................................................................................ 75
Figura 42. Aplicación (Movimiento) final en ejecución ...................................................... 75
Figura 43. Motor de potencia para los giros izquierda y derecha ........................................ 76
Figura 44. Control de 2 posiciones (hacia delante y atrás) ................................................... 77
Figura 45. Control y habilitación de los movimientos izquierda – derecha del circuito de
control ................................................................................................................................... 77
Figura 46. Prototipo Final de la Silla de Ruedas .................................................................. 78
Figura 47. Silla de Ruedas manipulada por Tablet en movimiento………………………..78
RESUMEN EJECUTIVO
El presente trabajo está dividida en varios capítulos, tendientes al desarrollo organizado y
secuencial del mismo .A continuación se da a conocer el aporte de cada uno de los
capítulos.
Dentro de su primera parte se ha especificado sus antecedentes planteamiento y
formulación, delimitación del problema donde se brinda un panorama de la realidad latente
que viven las personas con discapacidad.
Se tiene una introducción referente al problema fundamental de investigación sobre el
proyecto a realizarse, además se establecen los demás aspectos, tales como: objetivos y
justificación del problema.
En el primer capítulo se desarrolla el marco teórico donde abarca todos los elementos que
conforma la “Aplicación Android para el control de dispositivos de movilidad usados en la
Asociación ASOPLEJICAT”.
En el segundo capítulo se establece la metodología y técnicas de análisis a fin de obtener
una propuesta calificada.
En el tercer capítulo se desarrolla el esquema de la propuesta, el cual consiste en la
evaluación y diseño del presente tema de tesis con la ayuda de la previa investigación
realizada. Además, se incorpora conclusiones generales, recomendaciones, bibliografía y
anexos.
ABSTRACT
This paper is divided into several chapters, aimed at organized and sequential development
of the .Then it discloses the contribution of each of the chapters.
In the first part of his background it specified approach and formulation, delimitation of the
problem where an overview of the latent reality that people with disabilities live is
provided.
There is an introduction to the fundamental problem of research on the project to fruition,
also they establish other aspects, such as objectives and justification of the problem.
In the first chapter the theoretical framework that covers all the elements that make up the
"Android application to control mobility devices used in ASOPLEJICAT Association"
develops.
In the second chapter the methodology and analysis techniques to obtain a qualified
proposal states.
In the third chapter of the proposed scheme, which involves the evaluation and design of
this thesis topic with the help of the previous research develops. Furthermore, general
conclusions, recommendations, bibliography and appendices is incorporated.
INTRODUCCIÓN
Antecedentes de la Investigación
Los problemas de discapacidades en el mundo es significativo y afecta a todas las edades,
géneros y condiciones y pueden ser de diferentes grados y magnitudes, además son de tipo
psicológico, intelectual y mecánico o físico, tal es el caso de las personas con discapacidad
para la movilización por problemas de paraplejia y que lo reducen a la inmovilización parcial
o total, en tal virtud “La silla de ruedas es uno de los medios de asistencia de uso más
frecuente para mejorar la movilidad personal, condición previa para disfrutar de los derechos
humanos y una vida digna, y ayuda a las personas con discapacidad a convertirse en miembros
más productivos de sus comunidades. Para muchos, una silla de ruedas adecuada, bien
diseñada y armada puede constituir el primer paso hacia la inclusión y participación en la
sociedad” (OMS/USAID, 2008).
Desde la perspectiva de la OMS/USAID (2008)
Las Normas Uniformes de las Naciones Unidas sobre la Igualdad de Oportunidades para
personas con discapacidad, la Convención de los Derechos de las Personas con discapacidad y
la resolución WHA58.23 de la Asamblea Mundial de la Salud señalan la importancia que
tienen las sillas de ruedas y demás dispositivos de asistencia en el mundo en desarrollo, donde
pocos de los que necesitan sillas de ruedas las tienen, las instalaciones de producción son
escasas y donde con demasiada frecuencia se donan sillas de ruedas que carecen de los
servicios relacionados necesarios.
La Naciones Unidas con el afán de proteger los derechos de las personas con capacidades
especiales trabajan en función de sus beneficios en consecuencia
La Convención sobre los Derechos de las Personas con discapacidad y su Protocolo
Facultativo fueron aprobados por la Asamblea General de las Naciones Unidas el 13 de
diciembre de 2006, con el fin de promover, proteger y asegurar el goce igual y cabal de todos
los derechos humanos y libertades fundamentales por parte de todas las personas con
1
discapacidad, y promover el respeto por la dignidad inherente de dichas personas
(OMS/USAID, 2008).
Para Malave y Beauperthuy (2011, pág. 80)
La tecnología se ha convertido en un elemento transcendente que dirige muchas de las
actividades diarias que ocurren en el mundo. Una de estas se encuentra relacionada con el uso
de dispositivos móviles inteligentes. Estos dispositivos son herramientas que corren bajo un
Sistema Operativo (SO) determinado, cuya competencia y niveles complejidad cada día son
mayores haciendo posible administrar diferentes tipos de aplicaciones con avanzadas
capacidades.
Según Figueredo (2006), un Sistema Operativo para dispositivos móviles es considerado el
programa principal y éste es capaz de administrar todos sus recursos para ser utilizados de
manera eficiente, cómoda y sin interrupciones, de tal manera que el usuario pueda mantener
una comunicación sin problema haciendo uso de los recursos que el hardware le suministra.
(FIGUEREDO, 2006) Android es un sistema operativo con una plataforma abierta para
dispositivos móviles adquirido por Google y la Open Handset Allience, su finalidad es
satisfacer la necesidad de los operadores móviles y fabricantes de dispositivos, además de
fomentar el desarrollo de aplicaciones, cualidad que ningún otro sistema operativo incluye en
sus conceptos (Google, 2010).
La facilidad de la tecnología permite crear artefactos inteligentes que se ponen al servicio de la
humanidad para su bienestar por eso es que “cuando un acontecimiento desafortunado afecta
las capacidades motoras de una persona, es necesario recurrir a dispositivos tales como las
sillas de ruedas que permiten brindar un medio de desplazamiento a pacientes con problemas
de parálisis principalmente en los miembros inferiores” (POSADA & Sánchez, 2007).
En la biblioteca de la universidad de la escuela superior politécnica de Chimborazo se
encontró una tesis sobre silla de ruedas eléctricas manejada por joystick en el cual indico que
un computador puede hacer evolucionar a una silla de ruedas inteligente. La interacción
humano-computadora es un campo en constante evolución y nuevas formas de comunicarse se
2
están desarrollando como el control por voz o imagen” la cual me ayudo como referencia para
mi tesis.
Planteamiento del Problema
De acuerdo a los datos obtenidos, “hoy en día el 10% de la población mundial
(ORGANIZACIÓN MUNDIAL DE LA SALUD 2008), se encuentra inmovilizado de la parte
inferior del cuerpo. En virtud de ello se han creado diversos tipos de sillas de ruedas que, a lo
largo del tiempo, se ha mejorado con el fin de brindarles a los discapacitados la independencia
necesaria para poder trasladarse por su propia cuenta.
De esta manera se contribuye a que este tipo de pacientes, a pesar de su incapacidad, puedan
integrarse a la sociedad y al campo laboral”.
La libertad de movimiento es un hecho cotidiano en nuestras vidas, caminar, correr o nadar
son acciones que llevamos a cabo diariamente, sin embargo existen eventos desafortunados
que merman nuestra libertad de movimiento ya sea en una etapa muy temprana o tardía de
nuestra vida.
La falta de movimiento en alguna extremidad superior o inferior es conocida como parálisis,
esta puede ser por debajo de la cintura conociéndose como paraplejia o desde el nivel de
cuello hacia los pies, llamada cuadriplejía.
La asociación ASOPLEJICAT se encarga de asociar personas con falta de recursos que posean
capacidades especiales dándoles sillas muletas según la deficiencia que tengan.
Los problemas encontrados en la asociación:
Los agremiados no pueden manipular la silla de ruedas con sus brazos por falta de
fuerza
Algunos agremiados presentan apuntaciones en sus extremidades
Otros agremiados presentan insuficiencia renal
Además presentan problemas psicomotrices
3
Problema Científico
¿Cómo mejorar la calidad de vida en los discapacitados de la asociación ASOPLEJICAT?
Objeto de Investigación
Procesos de automatización
Campo de Acción
Interacción hombre maquina
Identificación de las líneas de Investigación
Automatización y control
Objetivos
Objetivo General
Diseñar un prototipo de silla de ruedas con aplicaciones Android para una mejor calidad de
vida de las personas con discapacidad en la asociación ASOPLEJICAT de la ciudad de
Ambato.
Objetivos Específicos
Fundamentar científicamente las aplicaciones móviles y desarrollo de software a través
de programación con la plataforma Android.
Diagnosticar la problemática de movilidad con silla de ruedas manuales en la
asociación ASOPLEJICAT.
Diseñar una aplicación android para automatización de una silla de ruedas que permita
la movilidad y autonomía en los usuarios de la asociación ASOPLEJICAT.
Validar la propuesta
4
Idea a Defender
Con la automatización de una silla de ruedas a través de una aplicación android se mejorara la
movilidad y autonomía a los usuarios que poseen capacidades especiales, que se encuentran
impedidos de desempeñar su vida normal en condiciones de seguridad y estabilidad.
Justificación
El sistema operativo Android facilita la creatividad, pues sus aplicaciones se desarrollan bajo
un lenguaje de programación fácilmente accesible, permitiendo así que cualquier persona con
conocimientos sobre Java pueda diseñar su propia aplicación.
Estas facilidades que brinda Android pueden ser aprovechadas para crear una aplicación de
control para las sillas de ruedas, siendo esto fundamental para aportar beneficios a personas
discapacitadas, ya que este dispositivo posibilitará el acceso rápido al control sobre la silla de
ruedas que se va utilizar.
La presente investigación se concibe con la intención de desarrollar un sistema de control
para aplicarlo en una silla de ruedas, el cual está orientado a ofrecer una mejor calidad de vida
a personas con discapacidades motrices en la asociación Asoplejicat, y ante la carencia de
aplicaciones móviles que controlen la movilidad de una silla de ruedas se observó la necesidad
de realizar un proyecto que sea funcional para las personas discapacitadas, por lo que se pensó
en una aplicación móvil basada en Android, la cual permitirá el control de la silla de ruedas a
través de bluetooth, estableciendo la posibilidad de controlar la silla desde una tablet,
brindando mayor independencia al usuario que puede alejarla o acercarla para su comodidad.
Este diseño de la aplicación es novedoso ya que permitirá controlar todos los movimientos de
la silla con la mano, lo cual es muy importante para personas con poca movilidad.
Este estudio contribuirá a la profundización y vínculo de los referentes teóricos concernientes
al sistema operativo Android con respecto a su aplicación en dispositivos móviles para el
control de sillas de ruedas.
5
La propuesta de este proyecto está dirigida al diseño y desarrollo de aplicaciones Android
como tecnología revolucionaria que aportará grandes beneficios, tanto a jóvenes, adultos o
instituciones que necesiten establecer un control en sillas de ruedas para mejorar la calidad de
vida de aquellas personas con discapacidades motrices.
Aporte Teórico
La presente investigación contribuirá con su aporte teórico a la creación y aplicación de un
control gracias a la tecnología android la cual sigue evolucionando gracias a las nuevas
tecnologías que se sigue empleando y aplicando en nuestros días. Lo que arrojara resultados
beneficiosos para los investigadores.
Novedad
La novedad determinada en este tema de investigación es la realización del control de una silla
de ruedas de forma inalámbrica sin necesidad de esfuerzo físico la cual facilitara la vida
cotidiana de los miembros de la asociación ASOPLEJICAT proporcionándoles una forma de
vida digna e integrándoles a la sociedad.
6
CAPÍTULO I
MARCO TEÓRICO
1.1
Introducción
Un dispositivo móvil se puede determinar como un aparato de pequeño tamaño, con algunas
capacidades de procesamiento, con conexión permanente o intermitente a una red, con
memoria limitada, que ha sido diseñado específicamente para una función, pero que puede
llevar a cabo otras funciones más generales. De acuerdo con esta descripción existen multitud
de dispositivos móviles, desde los reproductores de audio portátiles hasta los navegadores
GPS, pasando por los teléfonos móviles, los PDAs o los Tablet PCs. En este trabajo nos
centraremos fundamentalmente en los teléfonos móviles y en los PDAs por ser los tipos de
dispositivos más utilizados y conocidos en la actualidad, los que ofrecen mayor variedad de
aplicaciones multimedia y los que más posibilidades de evolución presentan en este sentido.
Los dispositivos inteligentes están conformados por dispositivos electrónicos que por lo
general están conectados a redes a través de varia vías o protocolos tales como Bluetooth,
NFC, WI-FI. #G, X10, entre otros, que pueden funcionar de forma interactiva y autónoma.
Estos dispositivos pueden estar diseñados para soportar una gran variedad de factores y una
gama de propiedades pertenecientes a la computación ubicua por lo que también se puede
utilizar en cualquier combinación de los tres principales entornos de sistema. Actualmente las
compañías están expandiendo sus fuerzas de trabajo a medida que es posible acceder a
tecnología cada vez más efectiva y asequible en la forma de dispositivos de mano de alta
tecnología conectados a redes inalámbricas más rápidas y confiables.
Tanto así, los dispositivos de mano actuales despliegan la mayoría de las capacidades y el
trabajo de un computador. Gracias a este avance los proveedores de aplicaciones ya no se ven
impedidos para crear y ofrecer soluciones para instalar en el dispositivo que extienden el
alcance de las aplicaciones de misión crítica. (BASTERRECHE, 2007)
7
1.2
Historia de los dispositivos inteligentes
La comunicación inalámbrica tiene sus raíces en la invención del radio por Nikola Tesla en los
años 1880, aunque formalmente presentado en 1984 por un joven italiano llamado Guglielmo
Marconi. El teléfono móvil se remonta a los inicios de la Segunda Guerra Mundial, donde ya
se veía que era necesaria la comunicación a distancia, es por eso que la compañía Motorola
creó un equipo llama do Handie Talkie H12-16, que es un equipo que permite el contacto con
las tropas vía ondas de radio que n ese tiempo no superaban más de 600 kHz. En 1979
aparecieron los primeros sistemas a la venta en Tokio (Japón), fabricados por la Compañía
NTT. Los países europeos no se quedaron atrás y en 1981 se introdujo en Escandinavia un
sistema similar a AMPS (Advanced Mobile Phone Systen). Y si bien Europa y Asia dieron los
primeros pasos, en Estados Unidos, gracias a que la entidad reguladora de ese país adoptó
reglas para la creación de un servicio comercial de telefonía celular, en 1983 se puso en
operación el primer sistema comercial en la ciudad de Chicago. (BASTERRECHE, 2007)
Resumiendo, hace una década aproximadamente los teléfonos celulares se caracterizaban sólo
por llamar, pero ha sido tanta la evolución que ya podemos hablar de equipos Multimedia que
puede llamar y ejecutar aplicaciones, jugar juegos 3D, ver videos, ver televisión y muchas
cosas más. Obviamente muchas marcas de placas madres para PC o fabricantes de hardware
en general se hacen presentes en los teléfono móviles como por ejemplo: ASUS e INTEL que
construyen las placas matrices de los celulares o ayudan con el acelerador gráfico o el sistema
de video. En fin, debemos tener conciencia y prepararnos para lo que se viene más adelante y
pensar que el teléfono celular ya no es tan sólo para hablar. (BASTERRETCHE, 2007)
1.3
Mercado de los dispositivos inteligentes
Antes de ver cómo es cada sistema operativo, hace falta realizar una breve reflexión para
observar qué se demanda en el mercado. En primer lugar, lo que la gente demanda es el
diseño, los servicios y las aplicaciones. El principal detonante en la revolución tecnológica,
fue la llegada del Android. Este hecho ha producido un cambio importante en el diseño
8
tecnológico, provocando el nacimiento de nuevos dispositivos inspirados en él. El mayor
desafío en el mercado es cómo agregar toda la funcionalidad que se desea cuando el espacio
en pantalla sigue siendo bastante pequeño en relación al de un computador convencional. Por
ello, a la hora de pensar en una nueva aplicación hay que considerar aspectos tan importantes
como si el usuario va a manejar el terminal con una sola mano o con ambas, o el contexto en
el cual se va a utilizar la aplicación. (IBARRECHE, 2010)
Otro aspecto a tener en cuenta en el desarrollo de aplicaciones es el diseño de servicios Web
que sean utilizados desde una Tablet. Antes que nada, se debe considerar las limitaciones
tecnológicas que impone el propio dispositivo; algunos terminales no está adaptados a códigos
complejos basados en Java Script y muchos no pueden con páginas que “pesen” mucho.
La comunicación entre máquinas y dispositivos es algo habitual. Y se utiliza en los ámbitos de
telemetría, recogida de datos, control de tráfico, mantenimiento remoto, etc. Actualmente estas
tecnologías están revolucionando el mercado. El desarrollo de las redes móviles GPRS y 3G,
así como las tecnologías gíreles Bluetooth, WiFi, WiMAX y RFID que permiten establecer
enlaces entre máquinas, han potenciado de forma muy importante las aplicaciones de máquina
a máquina (M2M). Al igual que el desarrollo en las máquinas y dispositivos, puesto que estos
últimos son cada vez más pequeños e inteligentes, formando parte de nuestra vida diaria, con
mayores prestaciones, y permitiendo automatizar a través de los mismos, tareas que antes eran
inviables.
Los terminales móviles han pasado de ser simples a ser dispositivos altamente complejos;
siendo equiparados a ordenadores, ofreciendo mayor fiabilidad y funcionalidad de todo tipo.
Dichos dispositivos son imprescindibles en la vida de las personas para disfrutar de los
componentes de ocio que ofrecen. Las nuevas oportunidades y características que ofrecen
estos terminales, han hecho que el mercado de la telefonía móvil sea el escenario de una lucha
encarnizada. Realmente no hay un ganador claro ni un perdedor absoluto, lo que existe es un
ajuste y posicionamiento en función de las habilidades de cada fabricante para convencernos
de las prestaciones de sus sistemas operativos. (IBARRECHE, 2010)
9
1.4
Discapacidad
La discapacidad es aquella condición bajo la cual ciertas personas presentan alguna deficiencia
física, mental, intelectual o sensorial que a largo plazo afectan la forma de interinar y
participar plenamente en la sociedad. Las personas discapacitadas pese a tener limitaciones en
diferentes ámbitos no son ni se sienten inútiles, pueden realizar las mismas actividades que
nosotros realizamos de una forma diferente o en menor medida acoplando su estado y
limitaciones a la acción a realizar. Es por eso que dependiendo del grado de discapacidad estas
personas pueden desde estudiar o trabajar hasta practicar deportes y participar en olimpiadas
sin necesidad de ser personas con capacidades extraordinarias, simplemente se ayudan de
mecanismos o sistemas que facilitan su interacción con el entorno en el que se desenvuelven.
(SCHALOCK Y VERDUGO, 2003)
1.5
Sistemas operativos para dispositivos inteligentes
A diferencia de los sistemas operativos que utilizan las computadoras, los sistemas operativos
móviles son bastantes simples y están orientados a la conectividad inalámbrica, formatos
multimedia, etc. Un sistema operativo móvil o SO móvil es un sistema operativo que controla
un dispositivo móvil al igual que las Computadoras más grandes utilizan Windows, Linux o
Mac OS entre otros. Sin embargo, los sistemas operativos móviles son mucho más simples y
están más orientados a la conectividad inalámbrica, los formatos multimedia para móviles y
las diferentes maneras de introducir información en ellos. Existen varios tipos de sistemas
operativos y cada uno posee diferencias. (IBARRECHE, 2010)
Symbian
Este sistema operativo es el más extendido. La empresa es propiedad de Ericsson, Panasonic,
Siemens AG, Nokia y Sony-Ericsson. Este sistema desciende de EPOC, empleado en los
antiguos ordenadores de bolsillo Psion.
10
Windows Mobile:
Windows Mobile, antes conocido como Windows CE o Pocket PC, tiene una larga historia
como segundón en el campo de los PDA u ordenadores de bolsillo, sin embargo hace pocos
meses superó por primera vez al entonces líder, Palm OS.
Linux
En los últimos años, muchas compañías relacionadas con el mundo de la movilidad,
fabricantes y desarrolladores de software y aplicaciones han optado por utilizar Linux como
base para sus sistemas operativos. Japón y China son los países donde Linux móvil está más
implantado, llegando a conseguir una cuota del 40% del mercado. En la actualidad, hay un
buen número de iniciativas de adaptación de Linux a terminales móviles. (PEDROZO, 2012)
1.5.1 Desarrollando para rim
RIM provee un sistema operativo propietario, multitarea para los dispositivos BlackBerrys que
hace uso intensivo de los dispositivos de entrada como el teclado y el trackball. El sistema
operativo provee soporte para MIDP 1.0 y 2.0 así como para WAP 1.2. Cualquier
desarrollador puede escribir software usando las APIs propietarias de BlackBerry, pero para
que una aplicación pueda acceder a ciertas funcionalidades restringidas debe estar firmado
digitalmente con un certificado asociado a una cuenta de desarrollador en RIM, este proceso
garantiza la procedencia de las aplicaciones, no así la calidad del código. (PEDROZO, 2012)
1.5.2 Android
Es un sistema operativo móvil basado en Linux, que junto con aplicaciones middleware está
enfocado para ser utilizado en dispositivos móviles como teléfonos inteligentes, tabletas,
11
Google TV y otros dispositivos. Es desarrollado por la Open Handset. Alliance, la cual es
liderada por Google. Este sistema por lo general maneja aplicaciones como Google Play. Fue
desarrollado inicialmente por Android Inc., una firma comprada por Google en 2005. Es el
principal producto de la Open Handset Alliance, un conglomerado de fabricantes y
desarrolladores de hardware, software y operadores de servicio.
Las unidades vendidas de teléfonos inteligentes y tablets con Android se ubican en el primer
puesto en los Estados Unidos, en el segundo y tercer trimestres de 2010, con una cuota de
mercado de 43,6% en el tercer trimestre. A nivel mundial alcanzó una cuota de mercado del
50,9% durante el cuarto trimestre de 2011, más del doble que el segundo sistema operativo
(iOS de Apple, Inc.) con más cuota. (PEDROZO, 2012)
Tiene una gran comunidad de desarrolladores escribiendo aplicaciones para extender la
funcionalidad de los dispositivos. A la fecha, se han sobrepasado las 700.000 aplicaciones (de
las cuales, dos tercios son gratuitas) disponibles para la tienda de aplicaciones oficial de
Android: Google Play, sin tener en cuenta aplicaciones de otras tiendas no oficiales para
Android, como pueden ser la App Store de Amazon o la tienda de aplicaciones Samsung Apps
de Samsung. Google Play es la tienda de aplicaciones en línea administrada por Google,
aunque existe la posibilidad de obtener software externamente. Los programas están escritos
en el lenguaje de programación Java. No obstante, no es un sistema operativo libre de
malware, aunque la mayoría de ello es descargado de sitios de terceros.
El anuncio del sistema Android se realizó el 5 de noviembre de 2007 junto con la creación de
la Open Handset Alliance, un consorcio de 78 compañías de hardware, software y
telecomunicaciones dedicadas al desarrollo de estándares abiertos para dispositivos móviles.
Google liberó la mayoría del código de Android bajo la licencia Apache, una licencia libre y
de código abierto. (PEDROZO, 2012)
1.6
Aplicaciones android
12
Se puede desarrollar una aplicación Android con las mismas herramientas utilizadas para
desarrollar en Java. Las "Android Core Libraries" proveen las funcionalidades necesarias para
construir impresionantes y poderosas aplicaciones para dispositivos móviles. El "Android
SDK" soporta Windows XP, Windows Vista, Linux y Mac OS y utiliza como IDE de
desarrollo a Eclipse mediante el plug in "Android Development Tools (ADT)” aunque es
posible utilizar Apache Ant para entornos Mac o Linux. (PEDROZO, 2012)
1.6.1 Características
Framework de aplicaciones: permite el reemplazo y la reutilización de los
componentes.
Navegador integrado: basado en los motores open Source Webkit.
SQlite: base de datos para almacenamiento estructurado que se integra directamente
con las aplicaciones.
Multimedia: Soporte para medios con formatos comunes de audio, video e imágenes
planas (MPEG4, H.264, MP3, AAC, AMR, JPG, PNG, GIF).
Máquina virtual Dalvik: Base de llamadas de instancias muy similar a Java.
Telefonía GSM: dependiente del terminal.
Bluetooth, EDGE, 3g y Wifi: dependiente del terminal.
Cámara, GPS, brújula y acelerómetro: Dependiente del terminal.
Pantalla Táctil.
1.6.2 Versiones de la plataforma
13
Existen varias versiones de la plataforma Android. Estas plataformas se identifican de tres
formas alternativas: versión, nivel de API y nombre comercial.
El nivel de API corresponde a números enteros comenzando desde 1. Para los nombres
comerciales se han elegido postres en orden alfabético Cupcake (v1.5), Donut (v1.6), Éclair
(v2.0), Froyo (v2.2), Gingerbread (v2.3). Las dos primeras versiones, que hubieran
correspondido a las letras A y B, no recibieron nombre.
1.6.3
Primeras
versiones
Android 1.0 Nivel de API 1 (septiembre 2008)
Primera versión de Android. Nunca se utilizó comercialmente, por lo que no tiene mucho
sentido desarrollar para esta plataforma.
Android 1.1 Nivel de API 2 (febrero 2009)
No se añadieron apenas funcionalidades simplemente se fijaron algunos errores de la versión
anterior. Es la opción a escoger si queremos desarrollar una aplicación compatible con todos
los dispositivos Android. No obstante apenas existen usuarios con esta versión.
Android 1.5 Nivel de API 3 (abril 2009)
Es la primera versión con algún usuario, aunque en la actualidad apenas quedan. Como
novedades, se incorpora la posibilidad de teclado en pantalla con predicción de texto, los
terminales ya no tienen que tener un teclado físico, así como la capacidad de grabación
avanzada de audio y vídeo. También aparecen los widgets de escritorio y live folders.
Incorpora soporte para bluetooth estéreo, por lo que permite conectarse automáticamente a
auriculares bluetooth. Las transiciones entre ventanas se realizan mediante animaciones.
(JESUS TOMAS: LAS VERSIONES DE ANDROID Y NIVELES DE API., 2015)
14
Android 1.6 Nivel de API 4 (septiembre 2009)
Permite capacidades de búsqueda avanzada en todo el dispositivo. También se incorpora
gestures y la síntesis de texto a voz. Asimismo, se facilita que una aplicación pueda trabajar
con diferentes densidades de pantalla. Soporte para resolución de pantallas WVGA. Aparece
un nuevo atributo XML, onClick, que puede especificarse en una vista. Soporte para
CDMA/EVDO, 802.1x y VPNs.
Android 2.0 Nivel de API 5 (octubre 2009)
Esta versión de API apenas cuenta con usuarios, dado que la mayoría de fabricantes pasaron
directamente de la versión 1.6 a la 2.1. Como novedades cabría destacar que incorpora un API
para manejar el bluetooth 2.1. Nueva funcionalidad que permite sincronizar adaptadores para
conectarlo a cualquier dispositivo. Ofrece un servicio centralizado de manejo de cuentas.
Mejora la gestión de contactos y ofrece más ajustes en la cámara. Se ha optimizado la
velocidad de hardware. Se aumenta el número de tamaños de ventana y resoluciones
soportadas. Nueva interfaz del navegador y soporte para HTML5. Mejoras en el calendario y
soporte para Microsoft Exchange. La clase MotionEvent ahora soporta eventos en pantallas
multitáctil.
Android 2.1 Nivel de API 7 (enero 2010)
Se considera una actualización menor, por lo que la siguieron llamando Éclair. Destacamos el
reconocimiento de voz, que permite introducir un campo de texto dictando sin necesidad de
utilizar el teclado. También permite desarrollar fondos de pantalla animados. Se puede obtener
información sobre la señal de la red actual que posea el dispositivo. En el paquete WebKit se
incluyen nuevos métodos para manipular bases de datos almacenadas en Internet. (JESUS
TOMAS: LAS VERSIONES DE ANDROID Y NIVELES DE API., 2015)
15
Android 2.2 Nivel de API 8 (mayo 2010)
Como característica más destacada se puede indicar la mejora de velocidad de ejecución de las
aplicaciones (ejecución del código de la CPU de 2 a 5 veces más rápido que en la versión 2.1
de acuerdo a varios benchmarks). Esto se consigue con la introducción de un nuevo
compilador JIT de la máquina Dalvik.
Se añaden varias mejoras relacionadas con el navegador Web, como el soporte de Adobe
Flash 10.1 y la incorporación del motor Javascript V8 utilizado en Chrome.
El desarrollo de aplicaciones permite las siguientes novedades: se puede preguntar al usuario
si desea instalar una aplicación en un medio de almacenamiento externo (como una tarjeta
SD), como alternativa a la instalación en la memoria interna del dispositivo. Las aplicaciones
se actualizan de forma automática cuando aparece una nueva versión. Proporciona un servicio
para la copia de seguridad de datos que se puede realizar desde la propia aplicación para
garantizar al usuario el mantenimiento de sus datos. Por último, se facilita que las aplicaciones
interaccionen con el reconocimiento de voz y que terceras partes proporcionen nuevos motores
de reconocimiento.
Se mejora la conectividad: ahora podemos utilizar nuestro teléfono para dar acceso a Internet a
otros dispositivos (tethering), tanto por USB como por Wi-Fi. También se añade el soporte a
Wi-Fi IEEE 802.11n y notificaciones push.
Se añaden varias mejoras en diferentes componentes: En el API gráfica OpenGL ES se pasa a
soportar la versión 2.0. Para finalizar, permite definir modos de interfaz de usuario
(“automóvil” y “noche”) para que las aplicaciones se configuren según el modo seleccionado
por el usuario. (JESUS TOMAS: LAS VERSIONES DE ANDROID Y NIVELES DE API.,
2015)
16
Android 2.3 Nivel de API 9 (diciembre 2010)
Debido al éxito de Android en las nuevas tabletas ahora soporta mayores tamaños de pantalla
y resoluciones (WXGA y superiores).
Incorpora un nuevo interfaz de usuario con un diseño actualizado. Dentro de las mejoras de la
interfaz de usuario destacamos la mejora de la funcionalidad de “cortar, copiar y pegar” y un
teclado en pantalla con capacidad multitáctil.
Se incluye soporte nativo para varias cámaras, pensado en la segunda cámara usada en
videoconferencia. La incorporación de esta segunda cámara ha propiciado la inclusión de
reconocimiento facial para identificar el usuario del terminal.
La máquina virtual de Dalvik introduce un nuevo recolector de basura que minimiza las
pausas de la aplicación, ayudando a garantizar una mejor animación y el aumento de la
capacidad de respuesta en juegos y aplicaciones similares. Se trata de corregir así una de las
lacras de este sistema operativo móvil, que en versiones previas no ha sido capaz de cerrar
bien las aplicaciones en desuso. Se dispone de mayor apoyo para el desarrollo de código
nativo (NDK).También se mejora la gestión de energía y control de aplicaciones. Y se cambia
el sistema de ficheros, que pasa de YAFFS a ext4.
Entre otras novedades destacamos en soporte nativo para telefonía sobre Internet VoIP/SIP. El
soporte para reproducción de vídeo WebM/VP8 y codificación de audio AAC. El soporte para
la tecnología NFC. Las facilidades en el audio, gráficos y entradas para los desarrolladores de
juegos. El soporte nativo para más sensores (como giroscopios y barómetros). Un gestor de
descargas para las descargas largas.
Android 3.0 Nivel de API 11 (febrero 2011)
Para mejorar la experiencia de Android en las nuevas tabletas se lanza la versión 3.0
optimizada para dispositivos con pantallas grandes. La nueva interfaz de usuario ha sido
17
completamente rediseñada con paradigmas nuevos para la interacción y navegación. Entre las
novedades introducidas destacan: Los fragments, con los que podemos diseñar diferentes
elementos del interfaz de usuario.La barra de acciones, donde las aplicaciones pueden mostrar
un menú siempre visible. Las teclas físicas son reemplazadas por teclas en pantalla.
La nueva interfaz se pone a disposición de todas las aplicaciones, incluso las construidas para
versiones anteriores de la plataforma. Esto se consigue gracias a la introducción de librerías de
compatibilidad (1) que pueden ser utilizadas en versiones anteriores a la 3.0.
Se mejora los gráficos 2D/3D gracias al renderizador OpenGL acelerado por hardware.
Apacere el nuevo motor de gráficos Rederscript, que saca mayor rendimiento al hardware e
incorpora su propia API. Se incorpora un nuevo motor de animaciones mucho más flexible,
conocido como animación de propiedades.
Primera versión de la plataforma que soporta procesadores multinúcleo. La máquina virtual
Dalvik ha sido optimizada para permitir multiprocesado, lo que permite una ejecución más
rápida de las aplicaciones, incluso aquellas que son de hilo único.
Se incorporan varias mejoras multimedia, como listas de reproducción M3U a través de HTTP
Live Sreaming, soporte a la protección de derechos musicales (DRM) y soporte para la
transferencia de archivos multimedia a través de USB con los protocolos MTP y PTP.
En esta versión se añaden nuevas alternativas de conectividad, como las nuevas APIS de
Bluetooth A2DP y HSP con streaming de audio. También, se permite conectar teclados
completos por USB o Bluetooth.
Se mejora el uso de los dispositivos en un entorno empresarial. Entre las novedades
introducidas destacamos las nuevas políticas administrativas con encriptación del
almacenamiento, caducidad de contraseña y mejoras para administrar los dispositivos de
empresa de forma eficaz.
A pesar de la nueva interfaz gráfica optimizada para tabletas, Android 3.0 es compatible con
las aplicaciones creadas para versiones anteriores.
18
Android 3.1 Nivel de API 12 (mayo 2011)
Se permite manejar dispositivos conectados por USB (tanto host como dispositivo). Protocolo
de transferencia de fotos y vídeo (PTP/MTP) y de tiempo real (RTP).
Android 3.2 Nivel de API 13 (julio 2011)
Optimizaciones para distintos tipos de tableta. Zoom compatible para aplicaciones de tamaño
fijo. Sincronización multimedia desde SD.
Android 4.0 Nivel de API 14 (octubre 2011)
La característica más importante es que se unifican las dos versiones anteriores (2.x para
teléfonos y 3.x para tabletas) en una sola compatible con cualquier tipo de dispositivo. Entre
las características más interesantes destacamos:
Se introduce un nuevo interfaz de usuario totalmente renovado. Por ejemplo, se reemplazan
los botones físicos por botones en pantalla (como ocurría en las versiones 3.x).
Nueva API de reconocedor facial, permite entre otras muchas aplicaciones desbloquear el
teléfono a su propietario. También se mejora en el reconocimiento de voz. Por ejemplo se
puede empezar a hablar en cuanto pulsamos el botón.
Aparece un nuevo gestor de tráfico de datos por Internet, donde podremos ver el consumo de
forma gráfica y donde podemos definir los límites a ese consumo para evitar cargos
inesperados con la operadora. Incorpora herramientas para la edición de imágenes en tiempo
real, con herramientas para distorsionar, manipular e interactuar con la imagen al momento de
ser capturada. Se mejora el API para comunicaciones por NFC y la integración con redes
sociales.
19
En diciembre del 2011 aparece una actualización de mantenimiento (versión 4.0.2) que no
aumenta el nivel de API. (JESUS TOMAS: LAS VERSIONES DE ANDROID Y NIVELES
DE API., 2015)
Android 4.0.3 Nivel de API 15 (diciembre 2011)
Se introducen ligeras mejoras en algunas APIs incluyendo el de redes sociales, calendario,
revisor ortográfico, texto a voz y bases de datos entre otros. En marzo de 2012 aparece la
actualización 4.0.4.Jelly Bean
Android 4.1 Nivel de API 16 (julio 2012)
En esta versión se hace hincapié en mejorar un punto débil de Android: la fluidez del interfaz
de usuario. Con este propósito se incorporan varias técnicas, como: sincronismo vertical, triple
búfer y aumentar la velocidad del procesador al tocar la pantalla.
Se mejoran las notificaciones con un sistema de información expandible personalizada. Los
Widgets de escritorio pueden ajustar su tamaño y hacerse sitio de forma automática al situarlos
en el escritorio. El dictado por voz puede realizarse sin conexión a Internet (de momento en
inglés).
Se introducen varias mejoras en Google Search. Se potencia la búsqueda por voz con
resultados en forma de ficha. La función Google Now permite utilizar información de
posición, agenda y hora en las búsquedas.
Se incorporan nuevo soporte para usuarios internacionales: como texto bidireccional y
teclados instalables. Para mejorar la seguridad las aplicaciones son cifradas. También se
permite actualizaciones parciales de aplicaciones.
20
Android 4.2 Nivel de API 17 (noviembre 2012)
Una de las novededes más importantes es que podemos crear varias cuentas de usuario en el
mismo dispositivo. Aunque, esta característica solo está disponible en tabletas. Cada cuenta
tendrá sus propias aplicaciones y configuración.
Los Widgets de escritorio pueden aparecer en la pantalla de bloqueo.Se incorpora un nuevo
teclado predictivo deslizante al estilo Swype.Posibilidad de conectar dispositivo y TVHD
mediante wifi (Miracast). Mejoras menores en las notificaciones. Nueva aplicación de cámara
que incorpora la funcionalidad Photo Sphere para hacer fotos panorámicas inmersivas (en
360º).
Android 4.3 Nivel de API 18 (julio 2013)
Esta
versión
introduce
mejoras
en
múltiples
áreas.
Entre
ellas
los perfiles
restringidos (disponible sólo en tabletas) que permiten controlar los derechos de los usuarios
para ejecutar aplicaciones específicas y para tener acceso a datos específicos.Igualmente, los
programadores pueden definir restricciones en las apps, que los propietarios puedan activar si
quieren.
Se da soporte para Bluetooth Low Energy (BLE) que permite a los dispositivos Android
comunicarse con los periféricos con bajo consumo de energía. Se agregan nuevas
características para la codificación, transmisión y multiplexación de datos multimedia.
Se da soporte para OpenGL ES 3.0. Se mejora la seguridad para gestionar y ocultar las claves
privadas y credenciales. (JESUS TOMAS: LAS VERSIONES DE ANDROID Y NIVELES
DE API., 2015)
21
Kitkat
Android 4.4 Nivel de API 19 (octubre 2013)
Aunque se esperaba la versión número 5.0 y con el nombre Key Lime Pie, Google sorprendió
con el cambio de nombre, que se debió a un acuerdo con Nestlé para asociar ambas marcas.
El principal objetivo de la versión 4.4 es hacer que Android esté disponible en una gama aún
más amplia de dispositivos, incluyendo aquellos con tamaños de memoria RAM de solo 512
MB. Para ello, todos los componentes principales de Android han sido recortados para reducir
sus requerimientos de memoria, y se ha creado una nueva API que permite adaptar el
comportamiento de la aplicación en dispositivos con poca memoria.
Más visibles son algunas nuevas características de la interfaz de usuario. El modo de
inmersión en pantalla completa oculta todas las interfaces del sistema (barras de navegación y
de estado) de tal manera que una aplicación puede aprovechar el tamaño de la pantalla
completa. WebViews (componentes de la interfaz de usuario para mostrar las páginas Web) se
basa ahora en el software de Crome de Google y por lo tanto puede mostrar contenido basado
en HTM5.
Se mejora la conectividad con soporte de NFC para emular tarjetas de pago tipo HCE, varios
protocolos sobre Bluetooth y soporte para mandos infrarrojos. Tambien se mejoran los
sensores para disminuir su consumo y se incorpora un sensor contador de pasos.
Se facilita el acceso de las aplicaciones a la nube con un nuevo marco de almacenamiento.
Este marco incorpora un tipo específico de content provider conocido como document
provider, nuevas intenciones para abrir y crear documentos y una ventana de dialogo que
permite al usuario seleccionar ficheros.
Se incorpora un administrador de impresión para enviar documentos a través de WiFi a una
impresora. También se añade un content provider para gestionar los SMS.
Desde una perspectiva técnica, hay que destacar la introducción la nueva máquina virtual
ART, que consigue tiempos de ejecución muy superiores a la máquina Dalvik. Sin embargo,
todavía está en una etapa experimental.
22
Por defecto se utiliza la máquina virtual de Dalvik, permitiendo a los programadores activar
opcionalmente ART para verificar que sus aplicaciones funcionan correctamente. (JESUS
TOMAS: LAS VERSIONES DE ANDROID Y NIVELES DE API., 2015)
Android 4.4 KitKat
Lollipop
ANDROID 5.0 NIVEL DE API 21 (NOVIEMBRE 2014)
La novedad más importante de Lollipop es la extensión de Android a nuevas plataformas,
incluyendo Google Wear, Google TV y Google Card. Hay un cambio significativo en la
arquitectura, al utilizar la máquina virtual ART en lugar de Dalvik. Esta novedad ya había sido
incorporada en la versión anterior a modo de prueba. ART mejora de forma considerable el
tiempo de ejecución del código escrito en Java. Además se soporta dispositivos de 64 bits en
procesadores ARM, x86, y MIPS. Muchas aplicaciones del sistema (Chrome, Gmail,…) se
han incorporado en código nativo para una ejecución más rápida.
Desde el punto de vista del consumo de batería, hay que resaltar que en Lollipop el modo de
ahorro de batería se activa por defecto. Este modo desconecta algunos componentes en caso de
que la batería esté baja. Se incorpora una nueva API (android.app.job.JobScheduler) que
nos permite que ciertos trabajos se realicen solo cuando se cumplan determinadas condiciones
(por ejemplo con el dispositivo cargando).
También se incluyen completas estadísticas para analizar el consumo que nuestras
aplicaciones hacen de la batería.
En el campo Gráfico Android Lollipop incorpora soporte nativo para OpenGL ES 3.1.
Además esta versión permite añadir a nuestras aplicaciones un paquete de extensión con
funcionalidades gráficas avanzadas (fragment shader, tessellation, geometry shaders, ASTC).
23
Otro aspecto innovador de la nueva versión lo encontramos en el diseño de la interfaz de
usuario. Se han cambiado los iconos, incluyendo los de la parte inferior (Retroceder, Inicio y
Aplicaciones), que ahora son un triángulo, un círculo y un cuadrado.
El nuevo enfoque se centra en Material Design (http://www.google.com/design/materialdesign.pdf). Consiste en una guía completa para el diseño visual, el movimiento y las
interacciones a través de plataformas y dispositivos. Google pretende aplicar esta iniciativa a
todas las plataformas, incluyendo wearables y Google TV. (JESUS TOMAS: LAS
VERSIONES DE ANDROID Y NIVELES DE API., 2015)
La nueva versión también incluye varias mejoras para controlar las notificaciones. Ahora son
más parecidas a las tarjetas de Google Now y pueden verse en la pantalla de bloqueo.
Se incorporan nuevos sensores como el de pulso cardiaco, el de inclinación (para reconocer el
tipo de actividad del usuario), y sensores de interacción compuestos para detectar ciertos
gestos.
Como curiosidad la nueva versión introduce un modo de bloqueo que impide al usuario salir
de una aplicación y bloquea las notificaciones. Esto podría utilizarse, por ejemplo, para que
mientras un usuario realiza un examen, no pueda ver las notificaciones, acceder a otras
aplicaciones, o volver a la pantalla de inicio. (JESUS TOMAS: LAS VERSIONES DE
ANDROID Y NIVELES DE API., 2015)
1.6.4 Arquitectura
La arquitectura interna de la plataforma Android, está básicamente formada por 4
componentes:
Aplicaciones: Todas las aplicaciones creadas con la plataforma Android, incluirán como base
un cliente de email (correo electrónico), calendario, programa de SMS, mapas, navegador,
contactos, y algunos otros servicios mínimos. Todas ellas escritas en el lenguaje de
programación Java.
24
Framework de aplicaciones: Todos los desarrolladores de aplicaciones Android, tienen
acceso total al código fuente usado en las aplicaciones base. Esto ha sido diseñado de esta
forma, para que no se generen cientos de componentes de aplicaciones distintas, que
respondan a la misma acción, dando la posibilidad de que los programas sean modificados o
reemplazados por cualquier usuario sin tener que empezar a programar sus aplicaciones desde
el principio.
Librerías: Android incluye en su base de datos un set de librerías C/C++, que son expuestas a
todos los desarrolladores a través del framework de las aplicaciones Android System C library,
librerías de medios, librerías de gráficos, 3D, SQlite, etc.
Runtime de android: Android incorpora un set de librerías que aportan la mayor parte de las
funcionalidades disponibles en las librerías base del lenguaje de programación Java. La
Máquina Virtual está basada en registros, y corre clases compiladas por el compilador de Java
que anteriormente han sido transformadas al formato .dex (Dalvik Executable) por la
herramienta ''dx''. (MUNDOMANUALES, 2011)
1.6.5 Sistemas operativos
El sistema operativo Android ha ido evolucionado, mostrando diferentes versiones que
contiene mejorías. Una de estas versiones fue la optimización de Android 4.0 ICS, pero por
supuesto también tiene algunas funciones nuevas. Gracias a la nueva técnica de triple
buffering, esta versión de Android se ha convertido en la más rápida hasta el momento.
1.6.6 Lenguajes de programación
Existen varios lenguajes de programación para desarrollar aplicaciones Android, los más
utilizados son: Java, C# NET o VisualBasic, Java,C#, C, NET, VisualBasic y una aplicación
web con App Inventor.
25
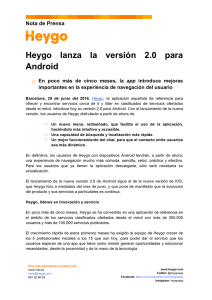
1.7
APP Inventor
Este tipo de programa nos permite crear aplicaciones de fácil acceso a un dispositivo Android,
ya sea un teléfono celular o una Tablet.
Figura 1. Diagrama de diseño del App Inventor.
Fuente: (RIEGO, 2014)
Elaborado por: Fernando Rodríguez
El App Inventor es un servicio web en el cual se puede almacenar trabajos planteados. Es un
tipo de aplicación para dispositivos Android y se puede obtener un programa de desarrollo
mediante un navegador web y un teléfono móvil o Tablet Android. Se divide en dos partes: la
parte de diseño (Figura 1) y diagrama de bloques (Figura 2). La aplicación va apareciendo
conforme se va añadiendo elementos a la misma.
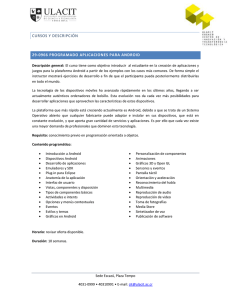
Figura 2. Diagrama de bloques del App Inventor.
Fuente: (RIEGO, 2014)
Elaborado por: Fernando Rodríguez
26
La fase de diseño sirve para construir la interfaz de usuario – elementos de la aplicación. En
cambio el diagrama de bloques se basa en definir el comportamiento de los elementos de la
aplicación a implementarse. Ahora se cuenta con un navegador que posee este tipo de
aplicaciones “Google”. El App Inventor posee las siguientes características: (GUADALINFO,
2011)
Este tipo de aplicaciones es de fácil acceso ya que solo se necesitaría tener una cuenta
de google.
De fácil diseño, es decir, el usuario puede crear aplicaciones arrastrando y soltando
objetos, por lo que se llama Programación Gráfica.
Utiliza la biblioteca Apertura de bloques de Java, con la finalidad de crear
programación visual expresada en diagrama de bloques.
La conversión de los diagramas de bloques a la programación visual para una
aplicación Android es mediante el marco de trabajo Kawa y el lenguaje de
programación Scheme.
Es compatible con Mac OS X, GNU / Linux y sistemas operativos de Windows.
El navegador es compatible con Mozilla Firefox 3.6 o superior, Apple Safari 5.0 o
superior, Google Chrome 4.0 o superior y Microsoft Internet Explorer 7 o superior.
Este tipo de aplicaciones se puede instalar en cualquier teléfono y/o Tablet Android.
1.8
Arduino
Arduino es una plataforma de hardware libre, basada en una placa con un microcontrolador y
un entorno de desarrollo, diseñada para facilitar el uso de la electrónica en proyectos
multidisciplinares.
Arduino puede tomar información del entorno a través de sus entradas analógicas y digitales,
puede controlar luces, motores y otros actuadores. El microcontrolador en la placa Arduino se
27
programa mediante el lenguaje de programación Arduino (basado en Wiring) y el entorno de
desarrollo Arduino (basado en Processing). Los proyectos hechos con Arduino pueden
ejecutarse sin necesidad de conectar a un ordenador. (ARDUINO A, 2014)
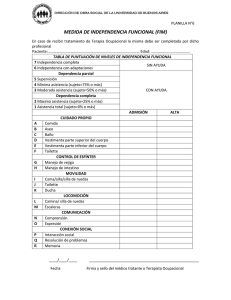
1.9
Programa arduino
Este programa es software libre y nos permite realizar acciones como leer las señales de la
Tablet u otros dispositivos inteligentes.
El programa contiene un editor textual para que el usuario escriba un código que nos permita
controlar los motores, led, display lcd etc. Tiene una barra de herramientas que ayudará a
verificación correcta del programa diseñado y subirlo a la placa Arduino. Dispone de una serie
de menús como cualquier otro programa. Entre las funciones principales para desarrollo de
programas son:
-
Verificar: la función es comprobar si existe o no errores en el programa.
-
Subir: se compila el código de programa y lo carga en la placa Arduino.
-
Monitor Serial: se abre una pantalla donde se visualiza la comunicación serial de
datos del programa existente. (ARDUINO A, 2014)
Figura 3. Programa Arduino 1.5.7
Fuente: (ARDUINO A. , 2014)
Elaborado por: Fernando Rodríguez
28
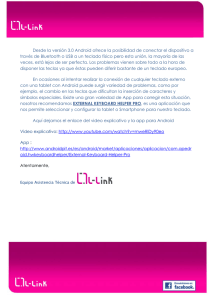
1.10 Tarjeta arduino
Este tipo de tarjetas ayuda a relacionar componentes electrónicos y aplicaciones Android. La
tarjeta Arduino Uno posee un microcontrolador Atmega 328 visto en la Figura 4.
Figura 4. Arduino Uno
Fuente: (RIEGO, 2014)
Elaborado por: Fernando Rodríguez
Posee las siguientes características: (ARDUINO, 2014)
Tiene 14 pines digitales de entrada / salida. De los cuales 6 pines se puede utilizar para
señales PWM (modulación ancho de pulso). Por lo general, una aplicación de este tipo
de señal PWM, se usa para controlar la velocidad de un motor y/o servomotor.
Tiene 6 entradas analógicas.
Un resonador cerámico de 16 Mhz.
Posee conexión USB.
Un conector y pines de alimentación. Puede operar con un voltaje de entrada entre 7 a
12 Voltios. El voltaje de operación o de alimentación puede ser 3.3 o 5 Voltios.
Un botón de reinicio.
29
Con esta tarjeta podemos comunicarnos de forma serial al computador por medio de un
cable USB a serie con los pines Rx = 0 y Tx = 1 y/o mediante la implementación de un
módulo bluetooth se puede comunicar el arduino uno de forma inalámbrica. Posee otro
tipo de comunicaciones I2C y SPI.
Tiene un monitor serial con el que se puede realizar una simulación del software
mediante comunicación serial.
1.11 Bluetooth
Bluetooth es una especificación industrial para Redes Inalámbricas de Área Personal (WPAN)
que posibilita la transmisión de voz y datos entre diferentes dispositivos mediante un enlace
por radiofrecuencia en la banda ISM de los 2,4 GHz. Los principales objetivos que se
pretenden conseguir con esta norma son:
Facilitar las comunicaciones entre equipos móviles.
Eliminar los cables y conectores entre éstos.
Ofrecer la posibilidad de crear pequeñas redes inalámbricas y facilitar la sincronización de
datos entre equipos personales. (GALVEZ, 2005)
1.12 Comunicación vía bluetooth
El principal objetivo de esta tecnología, es la posibilidad de reemplazar los muchos cables
propietarios que conectan unos dispositivos con otros por medio de un enlace radio universal
de corto alcance
Para crear un entorno confiable y seguro, las comunicaciones deberán ser inalámbricas con la
finalidad de tener una aplicación accesible y eficaz. En la actualidad, se obtiene aplicaciones
económicas en el mercado debido al uso de las diferentes aplicaciones Android. Desde el
punto de vista sobre el envío de datos (transmisión), la tecnología bluetooth está basado en el
30
escenario inalámbrico mediante el uso de bandas de frecuencias. El módulo bluetooth posee
las siguientes características: (GALVEZ, 2005)
Tiene la capacidad de controlar varios equipos en un entorno, que funciona de forma
síncrono y a la misma frecuencia.
Un chip bluetooth consta de un transceiver de radio frecuencia, unidad de control de
enlace, software de gestión y un subsistema de antena.
El estándar bluetooth conecta a diferentes dispositivos a través de una banda a nivel
global (2.4 Ghz). A fin de eliminar las conexiones físicas entre los dispositivos. Para el
caso de relacionar el dispositivo Android y el arduino se utiliza un módulo bluetooth
para que puedan interactuar y ejecutar ciertas aplicaciones, visto en la Figura 5.
Figura 5. Conexión Arduino y Android.
Fuente: (KERIMIL, 2014)
Elaborado por: Fernando Rodríguez
31
Figura 6. Conexión Arduino al módulo Bluetooth.
Fuente: (SPAINLABS, 2014)
Elaborado por: Fernando Rodríguez
1.12.1 Configuración bluetooth al app inventor
En la Figura 7, se indica los dos bloques para diseñar un programa mediante la comunicación
vía bluetooth. Este nos permite comunicarnos con la tarjeta Arduino sin la necesidad de la
conexión física entre los dos elementos. Para utilizar algún componente se debe arrastrar a la
pantalla de visualización (Diseño) y luego de ese dato, aparece en la ventana las propiedades
del componente que se inserte en la App. Para manipular ciertos dispositivos eléctricos y/o
electrónicos, el App Inventor consta de dos partes: (OPENCODEZ, 2014)
32
Figura 7. Conexión Android mediante el módulo Bluetooth.
Fuente: (OPENCODEZ, 2014)
Elaborado por: Fernando Rodríguez
Bluetooth: en el diagrama de bloques se especifica la conexión entre el Android y el
Arduino, visto en la Figura 8.
Figura 8. Diagrama de bloques de la configuración Bluetooth
Fuente: (OPENCODEZ, 2014)
Elaborado por: Fernando Rodríguez
Sliders y/o Botones: es un conjunto de teclas, las cuales servirán para obtener el
control sobre los elementos eléctricos y/o electrónicos. Para el presente proyecto se
determina la posición de los diferentes movimientos de la silla de ruedas. En el
diagrama de bloques se configura en base a la Figura 9.
33
Figura 9. Diagrama de bloques para configuración del control
Fuente: (OPENCODEZ, 2014)
Elaborado por: Fernando Rodríguez
1.13 Motores eléctricos
Los motores eléctricos sirven para controlar la velocidad de los vehículos, montacargas,
locomoción, etc. Existen diversos tipos de motores eléctricos, entre los cuales se tiene: motor
de corriente continua, corriente alterna y universales. Para la disposición de la silla de ruedas
se utiliza dos motores de corriente continua. Uno para el movimiento hacia delante y atrás y
otro para el giro izquierda derecha. (ALIBABA, 2014)
Velocidad entre 1800 a 3000 revoluciones por minuto (RPM).
Fuente de alimentación: 24 Voltios.
Potencia de salida: 500 Vatios.
34
Figura 10. Motor Trans-eje
Fuente: (ALIBABA, 2014)
Elaborado por: Fernando Rodríguez
Un servomotor (Figura 11) consiste en tener un sistema de engranajes para aumentar el
torque y de un motor de corriente continua. Manda una señal codificada, esta señal
varía en función de la posición angular a la que se quiere llegar. Posee las siguientes
características:
De estructura pequeña con aumento de torque.
No consume mucha energía.
Alimentación de hasta 6 V.
Figura 11. Servomotor para control de los motores.
Fuente: (LABELEC, 2014)
Elaborado por: Fernando Rodríguez
35
Posee 3 cables de conexión: rojo (5V), negro (Tierra) y amarillo (señal de control). Por lo
general, la señal de control se la realiza mediante pulsos de milisegundos entre 1 a 2
milisegundos, con este obtendremos giros de 180 grados o más, tal como se indica en la
Figura 12.
Figura 12. Posición de los servomotores
Fuente: (LABELEC, 2014)
Elaborado por: Fernando Rodríguez
Un servomotor está conformado por un motor de corriente directa, juego de engranajes, un
potenciómetro y una tarjeta controladora, vista en la Figura 13.
Figura 13. Componentes de los servomotores
Fuente: (LABELEC, 2014)
Elaborado por: Fernando Rodríguez
36
Figura 14. Señal de Pulsos para el servomotor
Fuente: (LABELEC, 2014)
Elaborado por: Fernando Rodríguez
En la Figura 14 se indica la señal de pulsos controla al servomotor. Otro de los motores es un
motor de corriente continua de marca LiftMaster 8360 (Figura 15) el cual ayudará a realizar
los giros de izquierda a derecha. Posee las siguientes características: (GARAJES
PREFABRICADOS, 2011)
1.14 Baterías
Se denomina batería, batería eléctrica, acumulador eléctrico o simplemente acumulador, al
dispositivo que consiste en una o más celdas electroquímicas que pueden convertir la energía
química almacenada en electricidad, la batería proporciona la energía eléctrica para el motor
de arranque de un motor de combustión, como por ejemplo de un automóvil, de un alternador
del motor o de la turbina de gas de un avión. Las baterías que se usan como fuente de energía
para la tracción de un vehículo eléctrico se les denominan baterías de tracción. Los vehículos
híbridos pueden utilizar cualquiera de los dos tipos de baterías
Las baterías vienen en muchas formas y tamaños, desde las celdas en miniatura que se utilizan
en audífonos y relojes de pulsera, a los bancos de baterías del tamaño de las habitaciones que
proporcionan energía de reserva a las centrales telefónicas y ordenadores de centros de datos.
(GARAJES PREFABRICADOS, 2011)
37
Figura 15. Batería para el motor LifMaster 8360
Elaborado por: Fernando Rodríguez
Posee un voltaje sin carga de 13.5 a 13.8 Voltios.
Con uso puede operar de 14.4 a 15 Voltios.
Estar alejado de sitios donde se produzca llama o chispa eléctrica.
No hacer corto circuito con los terminales de la batería, es decir, no unir el
terminal positivo con el negativo.
No desarmarlo o hacerlo dejar caer a la batería.
Cuando se vaya a cargar a la batería, recordar que debe estar en un área bien
ventilada.
La batería contiene ácido sulfúrico diluído, en el caso de tener contacto directo,
lavarse inmediatamente con agua y buscar atención médica.
Debe estar en un ambiente no superior a los 55 ºC.
1.15 Batería motor corriente continúa
El motor de corriente continua (denominado también motor de corriente directa, motor CC o
motor DC) es una máquina que convierte la energía eléctrica en mecánica, provocando un
movimiento rotatorio, gracias a la acción que se genera del campo magnético. (GARAJES
PREFABRICADOS, 2011)
38
Figura 16. Motor de corriente continúa
Fuente: (GARAJES PREFABRICADOS, 2011)
Elaborado por: Fernando Rodríguez
Posee 3 botones que ayudan a controlar el ángulo de giro del motor, visto en la Figura 17.
Figura 17. Botones de Programación
Fuente: (GARAJES PREFABRICADOS, 2011)
Elaborado por: Fernando Rodríguez
39
El botón de regulación sirve como control del motor para indicar a cual posición desea girar
(izquierda o derecha). Mientras que los otros dos botones ayudan a realizar el giro deseado. Se
características del inversor. (GARAJES PREFABRICADOS, 2011)
1.16 Inversor de voltaje
El inversor de voltaje es un sistema que convierte la tensión de corriente en un voltaje
simétrico de corriente alterna, que puede ser de 220V o 120V, dependiendo del país o del uso
que se le piense dar a este circuito. La frecuencia del inversor se calibra de acuerdo a la
frecuencia requerida por el aparato o electrodoméstico que vallamos a alimentar
-
Capacidad de 750 Watios que opera en condiciones normales y 1500 Watios pico
como potencia instantánea. Voltaje de entrada de 12 Voltios y salida de 120 Voltios.
-
Fusible de protección; en caso de que el motor se bloqueé se encenderá una luz roja
indicando que se apague inmediatamente el inversor para evitar daños del mismo.
-
Interruptor de encendido/apagado (Figura 18).
-
Posee terminales para la conexión de la batería y motor.
Figura 18. Interruptor y Conexión al Motor
Fuente: (CECOMIN, 2015)
Elaborado por: Fernando Rodríguez
40
La construcción del inversor se basa en aluminio con el propósito de disipar el calor del
elemento de potencia.
Figura 19. Inversor de Voltaje
Fuente: (CECOMIN, 2015)
Elaborado por: Fernando Rodríguez
1.16.1 Parámetros de rendimiento
Factor armónico de la n-ésima armónica (HFn) El HFn, que es una medida de la
contribución individual de esa armónica se define así:
para
y
donde
es el valor eficaz (rms) de la componente fundamental,
es el valor eficaz de la n-ésima componente armónica.
Distorsión armónica total (THD-Total Harmonic Distortion). La distorsión armónica total,
es una medida de la coincidencia de formas entre una onda y su componente fundamental, se
define como
Armónica de orden más bajo (LOH-Lowest Order Harmonic) es aquel componente
armónico cuya frecuencia se acerca más a la de la fundamental, y su amplitud es mayor o igual
al 3% de la componente fundamental. (GARAJES PREFABRICADOS, 2011)
41
CAPÍTULO II
MARCO METODOLÓGICO
2.1
Caracterización del sector.
La asociación ASOPLEJICAT se encuentra ubicada en las calles 12 de noviembre y mera en
las multifamiliares.
En el año 1978 se creó la asociación ASOPLEJICAT con la finalidad de dar un servicio a la
comunidad y a la zona central del país su fundador fue el Dr. Byron Amaluisa Larrea quien
con un grupo de profesionales de ese tiempo brindaron a personas de escasos recursos, la
rehabilitación según su caso, comenzaron con 5 personas y hoy en día son 40 entre adultos
mayores y jóvenes con alguna discapacidad física, el centro a tenido muchas dificultades pues
comenzó en la calle olmedo en un pequeño consultorio donde se atendía y hoy se encuentra en
las multifamiliares de la 12 de noviembre en un horario de 8 AM a 16 PM se realiza las
respectivas rehabilitaciones a los pacientes, no han tenido apoyo gubernamental solo
funcionan con recursos propios de fundadores y socios de buena voluntad que apoyan esta
causa en donde se gestiona equipos necesario para las terapias por lo cual esta asociación
cuenta con el lema “trabajemos en beneficio de los demás”.
2.2
Descripción procedimiento metodológico.
2.2.1 Modalidad de investigación.
La modalidad investigativa que se ha utilizado en esta tesis es la denominada cualicuantitativa.
La investigación cualitativa es el procedimiento metodológico que se caracteriza por utilizar
palabras, textos, discursos, dibujos, gráficos e imágenes para comprender la vida social por
medio de significados
La investigación cuantitativa se caracteriza por recoger, procesar y analizar datos
cuantitativos o numéricos sobre variables previamente determinadas.
42
2.2.2 Por los objetivos
La siguiente investigación tiene como objetivos facilitar al usuario la utilización de esta silla
por medio de un módulo central el cual puede ser una Tablet o dispositivo móvil el cual posea
el acceso de mando a distancia para dar movimiento a la silla de ruedas.
2.2.3 Por el lugar
Está proyectado a implementarse en la asociación ASOPLEJICAT, ubicado en la ciudad de
Ambato, Ecuador.
2.2.4 Por la naturaleza
Se toma en cuenta todos los dispositivos y módulos (eléctricos/electrónicos) de diseño para un
diseño adecuado en el control de la silla de ruedas.
2.2.5 Por el alcance.
Los problemas de discapacidades en el mundo es significativo y afecta a todas las edades,
géneros y condiciones y pueden ser de diferentes grados y magnitudes, además son de tipo
psicológico, intelectual y mecánico o físico, tal es el caso de las personas con discapacidad
para la movilización por problemas de paraplejía y que lo reducen a la inmovilización parcial
o total, en tal virtud:
La silla de ruedas es uno de los medios de asistencia de uso más frecuente para mejorar la
movilidad personal, condición previa para disfrutar de los derechos humanos y una vida digna,
y ayuda a las personas con discapacidad a convertirse en miembros más productivos de sus
comunidades. Para muchos, una silla de ruedas adecuada, bien diseñada y armada puede
constituir el primer paso hacia la inclusión y participación en la sociedad (OMS/USAID,
2008).
43
Actualmente, con el avance de la tecnología se puede crear múltiples aplicaciones que facilitan
el desarrollo de software para varios usos, tal es el caso que se requiere contar con la
aplicación de la plataforma android para operar la silla de ruedas vía bluetooth y contribuir al
bienestar de los usuarios fara una mejor calidad de vida y desempeño normal de sus
actividades.
Uno de estos sistemas operativos de los dispositivos móviles inteligentes es Android que
representa una nueva alternativa tecnológica cuyo surgimiento ha generado una buena
impresión en su grupo de usuarios, siendo hoy en día un competidor que hace frente a otros
sistemas operativos considerados recientemente como líderes (Malave & Beauperthuy, 2011)
2.2.6 Por la factibilidad
Es de gran importancia recalcar la necesidad de trabajos de interés investigativo en la
UNIANDES, dentro de la carrera de Ingeniería en Sistemas e Informática contar con
proyectos en base a diseños e implementaciones de aplicaciones Android a sistemas
electrónicos para creación de sistemas automáticos, debido a esto, el estudiante tiene un reto
bajo los siguientes factores:
Falta de información en la adquisición de materiales.
Falta de información investigativa, la mayoría de casos son vistos en tesis y/o artículos
en inglés.
Las tecnologías son diversas y todo cambia en el diseño, construcción y programación
de los sistemas autónomos.
44
2.3
Población y muestra.
2.3.1 Población
TABLA N°1
ESTRATOS
UNIVERSO
Enfermero
1
Director
1
Miembros
de
ASOPLEJICAT
la
Asociación 38
TOTAL
40
Elaborado por: Fernando Rodríguez
2.3.2
Criterios
de inclusión y exclusión
TABLA N° 2
Inclusión
Exclusión
Miembros de la asociación ASOPLEJICAT
Director de la asociación ASOPLEJICAT
Miembros de la asociación que utilizan silla Enfermero de la asociación ASOPLEJICAT
de ruedas
Elaborado por: Fernando Rodríguez
2.3.3 Muestra
Se aplicaron los criterios de inclusión y exclusión de acuerdo a la población total 40 personas
es el 100% Ya que los miembros de la asociación ASOPLEJICAT se compone de menos de
100 personas no es factible aplicar la formula así que se procederá a realizar sobre el total de
la población.
45
INTERPRETACIÓN DE LOS RESULTADOS DE LAS ENCUESTAS APLICADAS
PREGUNTA N°1.
¿Tiene usted algún tipo de discapacidad?
TABLA N° 3
ENCUESTADOS SI
%
NO
%
95%
2
5%
40
38
Elaborado por: Fernando Rodríguez
GRÁFICO N° 1
NO
5%
SI
95%
SI
NO
INTERPRETACION DE DATOS:
De acuerdo a los resultados obtenidos dentro de la pregunta 1, tenemos que la mayoría de los
encuestados tienen discapacidad, mientras que el resto no la tiene.
46
PREGUNTA N° 2.¿Qué tipo de discapacidad tiene?
TABLA N°4
Discapacidad
#
%
Cerebral
0
0
Espinal
6
16
Muscular
2
5
Osteo articular
30
79
TOTAL
38
100
Elaborado por: Fernando Rodríguez
GRÁFICO N ° 2
Cerebral
0%
Espinal
16%
Muscular
5%
Osteo
articular
79%
INTERPRETACION DE DATOS:
Acorde a los resultados obtenidos dentro de pregunta 2, tenemos la mayoría de los
encuestados tiene discapacidad osteo articular, mientras que algunos poseen discapacidad
espinal y unos pocos de los encuestados tienen discapacidad muscular.
47
PREGUNTA N° 3.
¿A qué parte del cuerpo afecta su discapacidad?
TABLA N°5
Parte del cuerpo
#
%
Todo el cuerpo
0
0
Tronco
0
0
Extremidades inferiores
35
92
Extremidades superiores
3
8
TOTAL
38
100
Elaborado por: Fernando Rodríguez
GRÁFICO N° 3
Extremidades
superiores
8%
Todo el cuerpo
0%
Tronco
0%
Todo el cuerpo
Tronco
Extremidades inferiores
Extremidades superiores
Extremidades
inferiores
92%
INTERPRETACIÓN DE DATOS:
Al unísono con los resultados adquiridos dentro de la pregunta 3, ostentamos que gran parte de
los encuestados tienen discapacidad en las extremidades inferiores, por su parte el resto posee
su discapacidad en sus extremidades superiores.
48
PREGUNTA N° 4.
¿Utiliza usted silla de ruedas?
TABLA N° 6
ENCUESTADOS
SI
%
NO
%
38
95%
2
5%
40
Elaborado por: Fernando Rodríguez
GRÁFICO N° 4
SI
NO
5%
95%
INTERPRETACIÓN DE DATOS:
En función de los resultados obtenidos en la pregunta 4, se identifica gran parte de los
encuestados utilizan sillas de ruedas, sin embargo la minoría no prevé lo antes mencionado
49
PREGUNTA N ° 5.
¿Qué tipo de silla de ruedas utiliza usted?
TABLA N ° 7
Tipo silla de ruedas
#
%
Manual
35
92
Automática
1
3
Semi automática
2
5
Otra
0
0
TOTAL
38
100
Elaborado por: Fernando Rodríguez
GRÁFICO N ° 5
Automática
3%
Semi
automática
5%
Otra
0%
Manual
92%
Manual
Automática
Semi automática
Otra
INTERPRETACIÓN DE DATOS:
Dentro de la pregunta 5, se ha reflejado como resultado que la vastedad de los encuestados
posen una silla de ruedas manual,
mientras que algunos posen sillas de ruedas semi
automáticas y una pequeñez de encuestados posee una silla de ruedas automatica.
50
PREGUNTA N° 6.
¿Cuál es el principal factor que limita su movilidad en la silla de ruedas?
TABLA N° 8
Movilidad limitada
Barreras físicas
Número
de
#
%
30
79
personas 6
16
trabajadores disponibles
Otra
2
5
Total
38
100
Elaborado por: Fernando Rodríguez
GRÁFICO N ° 6
Número de
personas
trabajadores
disponibles
16%
Otra
5%
Barreras físicas
79%
INTERPRETACIÓN DE DATOS:
De acuerdo a los resultados obtenidos dentro de la pregunta 6, tenemos que una gran
representación de encuestados limitan su movilidad en la silla de ruedas por causas de barreras
físicas, mientras que otros por trabajadores de la asociación únicamente un minúsculo grupo
consideran por otra situación.
51
PREGUNTA N °7.
¿Cree usted que el uso de la tecnología puede contribuir a mejorar la calidad de vida de las
personas que usan sillas de ruedas?
TABLA N°9
ENCUESTADOS
SI
%
NO
%
33
82%
7
18%
40
Elaborado por: Fernando Rodríguez
GRÁFICO N ° 7
18%
82%
SI
NO
INTERPRETACIÓN DE DATOS:
De los resultados obtenidos dentro de la pregunta 7, obtenemos que un numeroso grupo de
encuestados cree que si habrían beneficios para la calidad de vida, no obstante un moderado
grupo no lo considera.
52
PREGUNTA N ° 8.
¿Usted maneja dispositivos electrónicos como celulares, tablets, entre otros dispositivos
inteligentes?
TABLA N ° 10
ENCUESTADOS
SI
%
NO
%
30
75%
10
25%
40
Elaborado por: Fernando Rodríguez
GRÁFICO N ° 8
NO
25%
SI
75%
SI
NO
INTERPRETACIÓN DE DATOS:
De los resultados alcanzados en la pregunta 8, podemos afirmar que un gran grupo de los
encuestados manipula dispositivos inteligentes, pese a que ubérrimo grupo que si no los
utiliza.
53
2.4
Diseño de técnicas e instrumentos de recolección de información.
Para la recolección de información se utilizan técnicas basadas en la observación
estableciendo los siguientes pasos:
La información por lo general suele encontrarse en tesis realizadas, libros, internet
y conocimientos adquiridos.
Mediante el uso de componentes eléctricos/electrónicos podemos obtener datos y
obtener la información requerida.
2.5 Conclusiones parciales
Se puede concluir que dentro de la asociación ASOPLEJICAT los usuarios se encuentran poco
satisfechos con el servicio que brinda la institución. Se puede ratificar que no existe nada de
implementaciones tecnológicas que se puede utilizar en la asociación, muchos usuarios de la
asociación se beneficiaran de esta aplicación ya que es de fácil manejo y comprensión para
manipular una silla de ruedas de manera segura y novedosa.
54
CAPÍTULO III
3. MARCO PROPOSITIVO
3.1 Tema
“Aplicación android para control de dispositivos de movilidad en la asociación
ASOPLEJICAT de la ciudad de Ambato “
3.2 Objetivo
3.2.1 Objetivo general
Implementar una aplicación android para el control de manejo de una silla de ruedas
3.2.2 Objetivos Específicos
Analizar las diferentes aplicaciones y controles para dispositivos de movilidad
Calcular el costo de la silla de ruedas con los sistemas diseñados
Desarrollar los circuitos electrónicos que permitan la recepción de señales de control
de la silla de ruedas
Diseñar una aplicación android que controle dispositivos de movilidad en la asociación
ASOPLEJICAT
3.3 Fundamentación
La utilización de esta aplicación mejorara la calidad de vida en las personas con
discapacidades porque a más de optimizar su tiempo podrán valerse por sí mismos e integrarse
en la sociedad.
Una información adecuada sobre el uso de la aplicación ayudara a adaptarse desarrollar e
implementar nuevas técnicas, utilizar un plan de seguridad para el uso y manejo de esta
aplicación que debe ser un elemento primordial para los usuarios que tengan acceso al mismo.
55
3.4 Desarrollo de la Propuesta
La presente propuesta está orientada a desarrollar un control en base a la aplicación Android la
cual permitirá controlar una silla de ruedas que busca brindar la movilidad y autonomía a los
usuarios que poseen capacidades especiales, que se encuentran impedidos de desempeñar su
vida normal en condiciones de seguridad y estabilidad. De acuerdo al plan del buen vivir el
CONADIS da asesoría técnica sobre formulación, transversalización, observancia,
seguimiento y evaluación de políticas públicas sobre discapacidades en el Ecuador, a personas
naturales y jurídicas; así como información sobre medidas de acción afirmativas para personas
con discapacidad y sus familias
3.4.1 Silla de ruedas controlada por android
Figura 20. Silla de Ruedas
Elaborado por: Fernando Rodríguez
En la Figura 20, se indica la silla de ruedas eléctrica, la cual va a ser controlada por una Tablet
con el programa App Inventor, una Tarjeta Arduino y motores que controlarán a los
movimientos de la silla. En las Tablas 1 y 2, se muestran diversas características del equipo a
implementarse.
56
Tabla 11. Especificaciones de la Silla de Ruedas Modelo SC155.
Características
Medidas
Estructura de la silla de ruedas (centímetros)
-
Largo
111.76 cm
-
Ancho
53.34 cm
Peso total sin las baterías
116 libras
Velocidad máxima
6.84 km/h
Capacidad de peso máxima
300 libras
Sistema de la silla de ruedas Electrónico, regenerativo
y electromecánico
Requerimientos
12 Voltios
32 Amperios – hora
de la Batería
Motor transversal
24 Voltios
0.4 HP = 298.4 W
Número de baterías: 2
12 Voltios
34 Amperios – Hora
Elaborado por: Fernando Rodríguez
Tabla 12. Materiales para el prototipo.
Cantidad
Materiales
1
Tablet
1
Arduino Uno
Descripción
Para hacer el control por medio de Android.
Para hacer el control electrónico de los
movimientos de la silla de ruedas
3
Servomotores
Uno para incrementar/disminuir la velocidad de
HS-311
la silla de ruedas. Otro para mover la palanca e
ir hacia delante ó atrás y uno más para habilitar
los giros de izquierda a derecha y viceversa.
1
Tarjeta
Hará de interfaz de comunicación entre la
Bluetooth
Tablet y el Arduino Uno
HC-06
57
1
Motor ½ HP
Para mover el giro de izquierda a derecha o
con batería
viceversa, de la silla de ruedas
incluida
3
Reguladores
Servirán para la alimentación de los
de voltaje
servomotores proveniente de la batería.
3.5 Fuentes de alimentación
Es necesario que cada componente eléctrico y electrónico disponga de fuentes de alimentación
con el objetivo de mover la silla de ruedas. Se utiliza diferentes baterías (Figura 21) para
independizar los motores en la silla de ruedas. A continuación, se describe las siguientes
funcionalidades:
Dos baterías de voltaje continuo DC, se utilizan para operar el motor trans – eje y mover la
silla de ruedas.
Una batería DC para operar el motor de ½ HP y realizar los giros de izquierda a derecha.
La silla de ruedas posee un cargador de baterías para 24 Voltios, el cual se recarga con
la energía eléctrica de la red que es de 120 Voltios alterna. Eso quiere decir que posee
un circuito rectificador para transformar a corriente continua.
Figura 21. Baterías para el Motor Trans – Eje.
Elaborado por: Fernando Rodríguez
58
Posee dos baterías de 12 Voltios cada una, las cuales ayudan al movimiento del motor
trans-eje, visto en la Figura 21.
3.6
Programa arduino
Se descarga desde la siguiente página web: http://arduino.cc. Para instalar el programa solo se
debe descomprimir la carpeta arduino y ejecutar el programa.
Se debe configurar el dispositivo con el que se va a trabajar y el puerto serie (COM #). Se
utiliza el Arduino Uno (Figura 23) para controlar los movimientos de la silla de ruedas.
Internamente posee un microcontrolador, el cual tiene las siguientes características:
(ARDUINO, 2014)
Figura 22. Opción Herramientas de Arduino
Fuente: (ARDUINO A. , 2014)
Elaborado por: Fernando Rodríguez
59
Figura 23. Componentes físicos del Arduino UNO
Fuente: (ARDUINO A. , 2014)
Elaborado por: Fernando Rodríguez
-
Voltaje de Operación de 5 V.
-
Voltaje de entrada entre 7 a 12 V.
-
14 Pines Digitales de entrada/salida.
-
6 salidas PWM.
-
6 pines análogos de entrada. Cada pin de entrada/salida, posee una corriente continua
máxima de 40 mili-ampers.
-
Velocidad de reloj de 16 Mega-hertz. Puede utilizarse la comunicación serial mediante los
pines de transmisión (TX) y recepción (RX).
La tarjeta arduino nos va a permitir ejecutar la programación. Conectamos los cables a los
pines de entrada (son los pines de nuestra placa que podemos utilizar para hacer lecturas. En la
placa Uno son los pines digitales (del 0 al 13) y los analógicos (del A0 al A5).) y de salida
(los pines de salidas se utilizan para el envío de señales. En este caso los pines de salida son
sólo los digitales (0 a 13)) estos van conectados los motores y el bluetooth.
60
Figura 24. Código del programa
Fuente: (ARDUINO A. , 2014)
Elaborado por: Fernando Rodríguez
Los pasos para realizar el código de programación para el control de la silla de ruedas son los
siguientes:
-
Se establecen librerías existentes.
-
Creación de variables, entradas y salidas.
-
Configuración del puerto serial y lectura de datos de la comunicación vía bluetooth.
-
Mover los elementos de potencia (servomotores y motores DC) del sistema.
Mediante la Figura 24, se establecen pasos para escribir un código de programa para el
presente proyecto:
61
1. Librerías para operar los servomotores.
#include <Servo.h>
//Definición de los servomotores a ser utilizados
Servo servo1;
Servo servo2;
Servo servo3;
2. Establecerán condiciones iniciales de la posición de los servomotores.
int motor1=0;
int motor2=120;
int motor3=50;
3. Abrir el puerto de comunicación serial a una velocidad de 9600.
void setup(){
//Declarar porque puerto va a operar los servomotores
servo1.attach(8);
servo2.attach(9);
servo3.attach(10);
Serial.begin(9600);
}
62
4. Se escribe el código del programa dentro de un lazo loop, a fin de que el control realice las
instrucciones dentro de un lazo infinito. La opción While es una condición que se realizará
bajo ciertas condiciones, en este caso, es mediante la comunicación vía bluetooth. Por
último, mediante la función analog/digital Write se comanda los movimientos de los
servomotores. A continuación, se toma un ejemplo de este control.
void loop() {
float dato = Serial.read(); //Recibe el dato proveniente de la aplicación android
//A cada dato se le asigna un valor para que el microcontrolador reciba dicho valor y pueda
ejecutar la tarea asignada
if (dato=='A')motor1=Serial.read();
if (dato=='B')motor2=Serial.read();
if (dato=='C')motor3=Serial.read();
//Se manda el dato al pin PWM para dar el giro al servomotor indicado
servo1.write(int(motor1));
servo2.write(int(motor2));
servo3.write(int(motor3));
}
Resto del código en anexos 2
63
3.7
Programa app inventor
Para la creación de un app se debe seguir los siguientes pasos:
1. Se debe crear una cuenta en la siguiente página web: www.google.com. La cual es:
Usuario: [email protected]
Contraseña: silladeruedas
Figura 25. Aplicación App - Diseño
Elaborado por: Fernando Rodríguez
2. Mediante un computador para crear una aplicación App y entrar a la siguiente página web:
http://ai2.appinventor.mit.edu/#5881625196888064
64
Una vez abierto el programa procedemos a crear un nuevo proyecto o se escoge uno existente.
Cabe notar que el programa es igual a otros programas como los de Microsoft Office. El crear
un proyecto se basa en la programación gráfica, es decir, se trasladan las imágenes al área de
diseño y automáticamente se crean las variables en el diagrama de bloques. Estos diagramas
dependerán de las condiciones de diseño que se deseen realizar.
Figura 26. Aplicación App - Bloques
Elaborado por: Fernando Rodríguez
Figura 27. Conexión entre los dos dispositivos
Elaborado por: Fernando Rodríguez
65
3. Instalar en el dispositivo Android el programa Mit Ai2 Companion.
4. Conectarse a una misma red Wifi, tanto el computador como el dispositivo Android
(Tablet).
5. Dar clic en la opción Connect y luego en Al companion (Figura 27), donde mostrará un
código de barras con una contraseña, la que permitirá pasar el programa del computador a
la Tablet, visto en la Figura 28.
Figura 28. Código de barras
Elaborado por: Fernando Rodríguez
En la Figura 29 se visualiza el ingreso de códigos hacia el dispositivo Android, que en este
caso es un teléfono celular.
Figura 29. Traslado del código de barras al dispositivo Android
Elaborado por: Fernando Rodríguez
66
A continuación, se describe la aplicación creada de la página ai2.appinventor hacia el
dispositivo móvil.
Figura 30. Aplicación real del AppInventor
Elaborado por: Fernando Rodríguez
3.7.1 Opción diseño de la app inventor
En la Figura 31 se visualiza una pantalla donde se va a crear la aplicación APP, ésta se verá
reflejada con botones y sliders al usuario para que tenga el control de la silla de ruedas. Se
tienen ventanas para que el usuario tenga la facilidad de implementar las variables que
conformarán el proyecto del control de la silla de ruedas.
Figura 31. Pantalla de Diseño
Elaborado por: Fernando Rodríguez
67
En la Figura se observa que está dividido en 4 componentes que son:
Paletas: son todas las herramientas que utiliza el usuario para crear una aplicación
APP. Entre este bloque se tienen opciones vistas en la Figura 32, las cuales ayuda a
formar una APP por medio de botones, arreglos, animaciones, simulación de sensores
y conectividad.
Vista: donde se produce la aplicación App, es decir, el cómo se va a quedar ejecutado
en la Tablet.
Componentes: todos los elementos usados de la paleta muestra como una lista de
subdivisiones desde el bloque principal hasta el secundario. Estos bloques se los puede
nombrar con cualquier nombre (Figura 35).
Figura 32. Paletas y Componentes
Elaborado por: Fernando Rodríguez
68
Propiedades: cada elemento que conforma la App, posee propiedades para cambiar el
nombre, texto, tamaño de letra, color, etc.
3.7.2 Opción diagrama de bloques de la app inventor
En este diagrama se encuentra 2 opciones: las herramientas de desarrollo y la programación
gráfica del proceso.
Figura 33. Elementos del diagrama de bloques
Elaborado por: Fernando Rodríguez
Como se visualiza en la Figura 33, se puede agregar texto (mensajes de llamada) a las
variables programadas. Además se encuentran los elementos que están actualmente en el
programa desarrollado; la idea es realizar una interacción entre esos elementos y las
condiciones operativas como lo son: when, if, do, etc. Cuando se crea el programa, se asigna
un control a un botón, visto en la Figura 34. El objeto es mandar bloques al espacio de trabajo
partiendo de la condición when, así con el resto de elementos se va formando una estructura
69
de bloques; cuando existe un error se muestra en la pantalla o no se unen las piezas del
rompecabezas.
Figura 34. Inicio del diagrama de bloques
Elaborado por: Fernando Rodríguez
El programa básicamente utiliza los siguientes bloques:
Inicializar el programa con la comunicación vía bluetooth (Figura 35) y conectar todos
los elementos para el envío de datos, debe poseer condiciones antes y después de haber
realizado la comunicación. Empieza el programa estableciendo la conexión bluetooth
con el dispositivo Android. Luego se habilita y se envías los datos requeridos para
realizar el control de la silla de ruedas.
70
Figura 35 conneccion Vía bluetooth
Elaborado por: Fernando Rodríguez
Para las variables como: velocidad y movimientos poseen el mismo tipo de bloques,
los cuales son llamados mediante los sliders. Se coloca un texto “letra” para que cada
variable lea de dato a dato. Existe las siguientes instrucciones:
Figura 36. Creación de la variable velocidad
Elaborado por: Fernando Rodríguez
Letra “A” para leer la instrucción velocidad de la silla de ruedas.
Letra “B” para leer la instrucción movimiento hacia delante y atrás de la silla
de ruedas.
Letra “C” para leer la instrucción control de movimiento de giro para la silla de
ruedas.
Letra “D” para leer la instrucción giro que servirá para el movimiento
izquierda/derecha de la silla de ruedas.
71
Por último, se crea la variable giros para mover la silla de ruedas de izquierda a
derecha. La configuración es similar al paso anterior, con la diferencia de que se coloca
un botón para indicar a cual lado moverse.
Resto del código en anexos 3
3.8
Configuración del módulo bluetooth
3.8.1 Conexión android y bluetooth
Para que el arduino tenga comunicación vía bluetooth se dispone de un módulo en forma de
chip llamado HC-06 y/o HC-05 visto en la Figura 6. Este chip viene configurado de fábrica y
puede trabajar como modo maestro (transmisión) o esclavo (receptor).
Este tipo de módulos nos permite comunicarnos entre la aplicación Android y el arduino. La
configuración puede ser mediante un programa de terminal o en un microcontrolador. El
módulo (Figura 6) posee un temporizador interno en el cual hace que el comando se envíe un
dato a la vez. No olvidar que la conexión sea la correcta, es decir, que el pin TX bluetooth
debe estar al RX de Arduino y que el pin RX bluetooth se conecte a TX del arduino. Cuando
se tiene la conexión preestablecida, se utiliza el hardware de UART. Posee 4 pines
importantes: Rx (recepción de datos), Tx (transmisión de datos), Voltaje de alimentación (3.6
a 6V) y Tierra.
72
Figura 37. Comunicación Bluetooth – Módulo HC-06
Elaborado por: Fernando Rodríguez
En la Figura 37 se visualiza el modo de comunicación vía bluetooth entre el dispositivo
Android y en reconocer el módulo HC-06. Esta parte es vital para lograr la comunicación del
control Android y los componentes a realizar los movimientos de la silla de ruedas. El módulo
bluetooth tiene dos estados que son:
Luz parpadeante. Pasa activada cuando se conecta a los pines de alimentación, se ve en
un led que si funciona el módulo.
Luz fija. Este estado indica que tanto los dispositivos Android y arduino están conectados.
Figura 38. Aplicación Android hacia la silla de ruedas
Elaborado por: Fernando Rodríguez
73
Se agrega una fuente pequeña (9V) y un regulador de voltaje 7805 para la alimentación del
arduino y del módulo bluetooth HC-06, visto en la Figura 38. Con las pruebas realizadas, se
determinó que la batería de la Figura presente, se encargará de alimentar al arduino, tarjeta
bluetooth y conversor lineal. Se tiene un interruptor para el encender/apagar el dispositivo de
control, visualizado en la Figura 39.
Figura 39. Aplicación terminada
Elaborado por: Fernando Rodríguez
Figura 40. Prototipo del Circuito Control
Elaborado por: Fernando Rodríguez
74
En la figura 41 se puede observar la aplicación final, En el aap inventor le damos clic en bulid
y creamos la aplicación la cual se instala en el dispositivo, para que se pueda realizar la
transferencia del programa. Se ha probado en otro teléfono celular Android.
Figura 41. Transferencia del Programa
Elaborado por: Fernando Rodríguez
Figura 42. Aplicación (Movimiento) final en ejecución
Elaborado por: Fernando Rodríguez
75
3.9
Motores
Los motores son una parte fundamental de la silla de ruedas, ya que mediante ellos se logra el
movimiento total de la silla de ruedas. Se tiene los siguientes movimientos, visto en la Tabla 3.
En la silla de ruedas posee un motor Trans-eje visto en la Figura 10 y posee las siguientes
características.
Tabla 13. Descripción de Motores y Servomotores
Cantidad
Descripción
Figura
1
Motor trans-eje conectado a las 2 llantas en la parte posterior
10
1
Motor de ½ HP acoplado al eje del volante para realizar los giros
43
izquierda y derecha
1
Servomotor para controlar los movimientos hacia delante y atrás
44
2
Servomotores para controlar y habilitar el circuito de control de los giros
45
izquierda o derecha
Elaborado por: Fernando Rodríguez
Figura 43. Motor de potencia para los giros izquierda y derecha
Elaborado por: Fernando Rodríguez
76
Figura 44. Control de 2 posiciones (hacia delante y atrás)
Elaborado por: Fernando Rodríguez
Figura 45. Control y habilitación de los movimientos izquierda – derecha del circuito de
control
Elaborado por: Fernando Rodríguez
Cabe notar que los motores poseen un circuito de control independientes, por lo que se puede
acoplar pequeños servomotores que no demandan alta corriente, y gracias a este detalle, se
puede hacer conexiones directamente con los elementos de control que son: Tablet y arduino.
En la Figura 46 se describe el prototipo final.
77
Figura 46. Prototipo Final de la Silla de Ruedas
Elaborado por: Fernando Rodríguez
Figura 47. Silla de Ruedas manipulada por Tablet en movimiento
Elaborado por: Fernando Rodríguez
78
Tabla de presupuesto
En el siguiente cuadro se detalla los recursos económicos en el desarrollo de la tesis:
Tabla 14.Tabla de presupuesto
Actividad
Gasto
Impresiones
80
Movilización
60
Análisis de investigación
200
Anillados
30
Mantenimiento de silla de ruedas
100
Estructura de hierro para sujetar motores
90
Desarrollo de software
300
TOTAL
860
Elaborado por: Fernando Rodríguez
Tabla de materiales
Tabla 15.Tabla de materiales
Cantidad
Descripción
Gasto
1
Tarjeta Arduino uno
50
3
Servos motores
90
1
Motor potencia
200
1
Inversor de voltaje
180
2
Protoboard
15
1
Bluetooth
30
1
Batería de auto
80
1
Batería para arduino
40
1
Silla de ruedas
Proveída por la asociación
ASOPLEJICAT
TOTAL
685
Elaborado por: Fernando Rodríguez
El total de gasto 1545 dólares americanos
79
Conclusiones y recomendaciones
Conclusiones
En la actualidad los dispositivos móviles realizan un sin número de funciones gracias a las
APPS (aplicación android), los cuales requieren de dos principios. La capacidad de hacerlo
(hardware que lo permite) y un programa capaz de permitir el uso de este hardware(software
para usarlo),recordando que todos los dispositivos vienen con un software pre cargado
llamado sistema operativo que sirve de enlace entre el usuario y la parte electrónica de la
maquina permitiendo realizar lo que el usuario desea.
Se determinó que la mayor parte de la informática empresarial sigue estando fijada en
ordenadores personales los cuales en pocos años los dispositivos móviles se convertirán en
centros neurológicos de la empresa y como no de los usuarios y más que delos con
discapacidades que facilite y mejore su calidad de vida.
Los principales problemas encontrados en la movilidad con silla de redas fueron los sujetos
con discapacidades de dicha investigación que requieren de ayudas técnicas (silla de ruedas)
como requisitos tecnológicos específicos, como el presentado en este proyecto para mejorar la
calidad de vida.
El diseño de implementación de la aplicación propuesta crea muchos beneficios a corto plazo
visualizando la facilidad de uso, a medio plazo en su contribución la autonomía del usuario y a
largo plazo el impacto social en la inclusión de este grupo de atención psicoterapia.
Se demostró que mediante la simulación del correcto funcionamiento del prototipo con ayuda
del software para la generación de la aplicación (Movimiento) y además de ello se procedió a
las pruebas en físico con resultados satisfactorios para el control efectivo de la silla de ruedas.
80
Recomendaciones
Es imprescindible seguir desarrollando nuevas tecnologías en base a sistemas móviles que
sean creativas, útiles, eficientes y prácticas para poder eliminar todo tipo de barreras como el
de la restricción de movilidad.
El uso de sillas de ruedas electrónicas manejadas por apps debe ser implementada en todos los
hospitales, centros de salud, ancianitos, y demás instituciones o asociación en el dentro del
grupo humano existan personas con restricciones para movilizarse.
Se debe realizar campañas de capacitación para orientar a las personas con discapacidad a la
manipulación de nuevas tecnologías y avances científicos para desarrollar un mejor futuro.
81
Bibliografía
Álvarez, S., Cuéllar, C., López, B., Adrada, C., Anguiano, R., Bueno, A., y otros. (2011).
Actitudes de los profesores ante la integración de las TIC en la práctica docente.
Estudio de un grupo de la universidad de Valladolid. Edutec-e. Revista Electrónica de
Tecnología Educativa(35).
Amundson, J. S., & Amundson, S. G. (1991). A joytick controlled wheelchair. Biomed SCI
Instrum., 131-133.
Báez, M., Borrego, A., Cordero, J., Cruz, L., González, M., Hernández, F., y otros. (s.f).
Introducción a Android. Madrid: Editorial E.M.E.
Figueredo, O. J. (2006). Sistemas Operativos para dispositivos Móviles. Entérese, 74-78.
Gallardo, Y., & Moreno, A. (1999). Recolecci{on de la información. Santafé de Bogotá:
ICFES.
Gomi, T., & Griffith, A. (1998). developing intelligent wheelchairs for the handicapped.
Lecture Notes in AI: Assistive Tecnology and Artificial Intelligence., 150-178.
Gutiérrez, R., Gardner, S., & Steward, J. (1993). Problemas de las articulaciones. Kansas:
Universidad de Kansas. Center on Independent Living.
Hernández, R., Fernández, C., & Baptista, P. (2010). Metodología de la Investigación
Científica (Quinta ed.). México D.F.: MGraw Hill.
Malave, K., & Beauperthuy, J. L. (Julio de 2011). "Android" el sistema operativo de Google
para dispositivos móviles. Negotium, 7(19), 79-96.
McDaniel, C. (2005). Investigación de Mercados. Madird: Cengage Learning .
Moreno, G. A., & Pérez, M. V. (2004). Diseño recurrente de sillas de ruedas. Tesis de
ingeniería. Caracas: Universidad Central de Venezuela.
OMS/USAID. (2008). Pautas para el suministro de sillas de ruedas manuales en entornos de
menores recursos. Ginebra: Organización Mundial de la Salud.
Posada, R., Sánchez, L. H., Martínez, A., & García, M. A. (Noviembre de 2007). Avances en
el desarrollo de un prototipo de sislla de ruedas inteligente controlada por instrucciones
gestuales faciales. 6to Congreso Nacional de Mecatrónica. San Luis Potosí, San Luis
Potosí, México: Asociación Mexicana de Mecatrónica A.C.
Semero-Villalta, H., & Spletzer, J. (2005). Vision-based Control of a Smart Wheelchair for the
Automated Transport and Retrieval System (ATRS). Lehigh: Lehigh University.
Sen, D. A., Ortiz, C., & Aguilar, J. G. (6,7,8 de Junio de 2013). Implementación de una
aplicación android orientada al control de un prototipo de silla de ruedas. IV Congreso
Nacional de Tecnología Aplicada a Ciencias de la Salud. Cholula, Puebla, México:
TECNyMED.
Wylie, E. J., & Chakera, T. M. (1988). Degenerative joint abnormalities inpatiens wint
paraplegia of duration greater than 20 years. Paraplegia, 101-106.
Linkografia
IBM Knowledge Center. (2011).
http://www01.ibm.com/support/knowledgecenter/SSYRPW_9.0.1.1/Android_limitations_and
_restrictions.dita?lang=es.
ALIBABA, A. (2014). Foshan Shunde Green Motor Technology Co., Ltd. Obtenido de dc 24v
transaxle kit de motor eléctrico para scooter de la movilidad en silla de ruedas:
http://spanish.alibaba.com/product-gs/24v-dc-transaxle-motor-kit-for-electric-mobilityscooter-and-wheelchair-2006894094.html
ARDUINO. (2014). Arduino Uno. Obtenido de http://arduino.cc/en/Main/arduinoBoardUno
ARDUINO, A. (2014). Arduino. Obtenido de http://arduino.cc/
BASTERRECHE, J. F. (2007). Dispositivos Móviles. Obtenido de Dispositivos Móviles:
http://exa.unne.edu.ar/depar/areas/informatica/SistemasOperativos/tfbasterretche.pdf
BASTERRETCHE, J. F. (2007). Dispositivos Móviles.
BOTSCIENCE, E. (2013). Módulo bluetooth master / slave (HC-05). Obtenido de
http://botscience.net/store/index.php?route=product/product&product_id=70
CADENA, J., & ARÉVALO, C. (2010). Diseño e Implementación de un Sistema Domótico
para control y seguridad en tiempo real vía teléfono celular. Riobamba.
CECOMIN, Q. (2015). Mercado Libre. Obtenido de Inversor De Voltaje De 12 V Dc A 110 V
Ac
750
Watts:
http://articulo.mercadolibre.com.ec/MEC-406938496-inversor-de-
voltaje-de-12-v-dc-a-110-v-ac-750-watts-_JM
FIGUEREDO, O. J. (2006). Sistemas Operativos para dispositivos Móviles. Entérese, 74-78.
GALVEZ, J. (25 de Febrero de 2005). Control de un módulo bluetooth mediante
microcontrolador.
Obtenido
https://upcommons.upc.edu/pfc/bitstream/2099.1/3607/2/36416-2.pdf
de
GARAJES
PREFABRICADOS,
S.
(2011).
LiftMaster
Professional.
Obtenido
de
http://www.garajesprefabricados.com/home.html
GUADALINFO,
e.
(2011).
Guadalinfo.
Obtenido
de
http://www.edukanda.es/mediatecaweb/data/zip/1164/page_08.htm#
IBARRECHE, J. M. (2010). CREACIÓN DE UNA PLATAFORMA DE . Obtenido de
CREACIÓN
DE
UNA
PLATAFORMA
DE
:
http://www.iit.upcomillas.es/pfc/resumenes/4c80407b81d27.pdf
JESÚS, R. (21 de Febrero de 2014). Bluetooth HC-05 y HC-06 Tutorial de Configuración.
Obtenido
de
http://www.geekfactory.mx/radio/bluetooth-hc-05-y-hc-06-tutorial-de-
configuracion/
KERIMIL, k. (2014). How to control arduino board using an android phone and a bluetooth
module. Obtenido de http://www.instructables.com/id/How-control-arduino-boardusing-an-android-phone-a/?lang=es
LABELEC,
S.
(2014).
EL
SERVOMOTOR.
Obtenido
de
http://www.info-
ab.uclm.es/labelec/solar/electronica/elementos/servomotor.htm
MUNDOMANUALES, M. (2011). Que es Android: Características y Aplicaciones. Obtenido
de
http://www.mundomanuales.com/telefonia/telefonos-moviles/que-es-android-
caracteristicas-y-aplicaciones-4110.html
OMS/USAID. (2008). Pautas para el suministro de sillas de ruedas manuales en entornos de
menores recursos. Ginebra: Organización Mundial de la Salud.
OPENCODEZ, O. (30 de Julio de 2014). DIYMakers,D. Obtenido de CREAR APP PARA
ARDUINO CON APP INVENTOR: http://diymakers.es/crear-app-para-arduino-conapp-inventor/
PEDROZO,
G.
O.
(2012).
Sistemas
Operativos
en
Dispositivos.
Obtenido
de
http://exa.unne.edu.ar/depar/areas/informatica/SistemasOperativos/Sistemas_Operativo
s_en_Dispositivos_Moviles.pdf
POLOLU,
R.
(2015).
Robotics
&
Electronics.
Obtenido
de
https://www.pololu.com/product/2865
POSADA, R., & Sánchez, L. (Noviembre de 2007). Avances en el desarrollo de un prototipo
de sislla de ruedas inteligente controlada por instrucciones gestuales faciales. 6to
Congreso Nacional de Mecatrónica. San Luis Potosí, San Luis Potosí, México:
Asociación Mexicana de Mecatrónica A.C.
RIEGO,
A.
(2014).
App
Inventor
en
Español.
Obtenido
de
https://sites.google.com/site/appinventormegusta/primeros-pasos
SPAINLABS,
S.
(10
de
Febrero
de
2014).
AppInventor.
Android+Módulo
Bluetooth+Arduino. Obtenido de http://spainlabs.com/foro/viewtopic.php?f=9&t=1192
ANEXOS
Encuesta
UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
ENCUESTA DIRIGIDA A LOS MIEMBROS DE LA ASOCIACION “ASOPLEJICAT” DE
LA CIUDAD DE AMBATO.
UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
ENCUESTA
Marque con una X, la respuesta que considere adecuada
1. ¿Tiene usted algún tipo de discapacidad?
SI
NO
2. ¿Qué tipo de discapacidad tiene?
Cerebral
Espinal
Muscular
Osteo articular
3. ¿A qué parte del cuerpo afecta su discapacidad?
Todo el cuerpo
Tronco
Extremidades inferiores
Extremidades superiores
4. ¿Utiliza usted silla de ruedas?
SI
NO
5. ¿Qué tipo de silla de ruedas utiliza usted?
Manual
Automática
Semi automática
Otra
6. ¿Cuál es el principal factor que limita su movilidad en la silla de ruedas?
Barreras físicas
Número de personas trabajadores disponibles
Otra
7. ¿Cree usted que el uso de la tecnología puede contribuir a mejorar la calidad de vida de las
personas que usan sillas de ruedas?
SI
NO
8. ¿usted maneja dispositivos electrónicos como celulares, tablets, entre otros dispositivos
inteligentes?
SI
NO
Gracias por su colaboración
Anexo 2 Código arduino
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
//bluetooth hc-06
int vcc1 = 3; // usamos un pin de salida en alto para alimentar servo1
int vcc2 = 4; // usamos un pin de salida al alto para alimentar servo2
int vcc3 = 5; // usamos un pin de salida al alto para alimentar servo3
int vcc4 = 6; // usamos un pin de salida al alto para alimentar servo4
int gnd = 7; // usamos un pin de salida al bajo para tierra servo3
int gnd1 = 13; // usamos un pin de salida al bajo para tierra servo4
int ang;
int c = 0; // Variable lectrura serial
char dato;
void setup() {
servo1.attach(9);
pinMode(vcc1, OUTPUT); //Declara pin de Salida servo1
digitalWrite(vcc1, HIGH); //Normalmente Apagado
servo2.attach(10);
pinMode(vcc2, OUTPUT); //Declara pin de Salida servo2
digitalWrite(vcc2, HIGH ); //Normalmente Apagado
servo3.attach(11);
pinMode(vcc3, OUTPUT); //Declara pin de servo3
digitalWrite(vcc3, LOW ); //Normalmente Apagado
servo4.attach(12);
pinMode(vcc4, OUTPUT); //Declara pin de Salida servo4
digitalWrite(vcc4, LOW ); //Normalmente Apagado
pinMode(gnd, OUTPUT); //Declara pin de Salida servo1
digitalWrite(gnd, LOW); //Normalmente Apagado
pinMode(gnd1, OUTPUT); //Declara pin de Salida servo1
digitalWrite(gnd1, LOW); //Normalmente Apagado
Serial.begin(9600);
}
void loop()
{
//si el modulo a manda dato, guardarlo en estado.
if(Serial.available() > 0)
{
dato = Serial.read();
} // esta parte del código es para solo 1 Carácter o Unidad.
// si el estado es 0 ese sería ADELANTE
if (dato == 'T')
{ //50
servo1.write(50);
delay(1500);
}
// de lo contrario si el estado es 1 ese sería NEUTRO
else if (dato == 'Y') {servo1.write(90);}
//ATRAS
if (dato == 'U')
{ //160
servo1.write(160);
delay(1500);
} else if (dato == 'Y'){servo1.write(90);}//NEUTRO
// si el estado es J esesería DERECHA
if (dato == 'J')
{
servo2.write(60);
delay(400);
servo2.write(90);
}
// de lo contrario si el estado es 3 ese sería atras
else if (dato == 'H') {servo2.write(90);}
// si el estado es 2 esesería IZQUIERDA
if (dato == 'G')
{
servo2.write(120);
delay(400);
servo2.write(90);
}else if (dato == 'H'){servo2.write(90);}
if (dato == 'C')
{
servo3.write(80);
delay(1000);
servo3.write(90);
//servo1.write(0);
}
// de lo contrario si el estado es 1 ese sería isquierda
else {servo3.write(90);}
dato= ' ';
}
Anexo 3 código App inventor