PWM - Didacta Italia
Anuncio

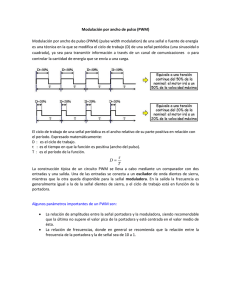
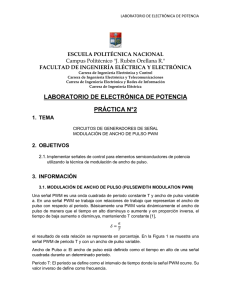
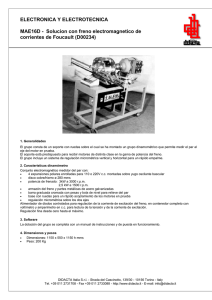
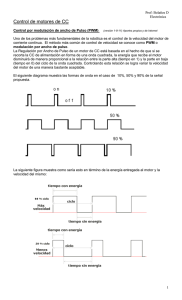
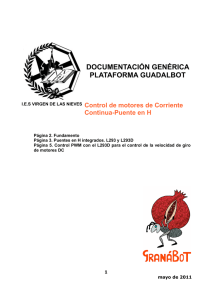
AUTOMACIÓN Y CONTROL DE PROCESOS PWM - Módulo Control PWM Motor CC 1. Generalidades La unidad permite estudiar las técnicas del control de velocidad de un motor CC con el variar de la carga. El pilotaje del motor se realiza con la técnica PWM (Pulse Width Modulation) mientras que la retroacción puede ser de velocidad o de armadura. La unidad comprende por tanto, además del motor mismo y de la tarjeta de accionamiento PWM, un freno electromagnético en eje con el motor y una dínamo taquimétrica. La referencia de velocidad y la corriente de frenado pueden ser reguladas manualmente o suministradas desde el externo mediante una tensión variable. La unidad comprende una tarjeta de conversión A/D - D/A que permite suministrar dichas señales mediante Ordenador y adquirir las señales más significativas para comprender el funcionamiento del sistema. Un apropiado software que actúa en ambiente MS-Windows permite la ejecución de la prueba mediante Ordenador. La unidad comprende todos los instrumentos de medida necesarios para la ejecución de la prueba y numerosos puntos de medida para verificar con instrumental externo las señales más importantes. Es adecuada para un laboratorio interdisciplinario por el hecho que presenta contenidos mecánicos, electrónicos, informáticos. 2. Composición La unidad PWM está compuesta por: Grupo Motor - Freno - Dínamo con equipo eléctrico y tarjeta A/D D/A (cód. 916925); Software de gestión PWM (cód. 916948); Software opcional PosAng para la conexión con el Módulo Enco (cód. 916944). • • • 3. Descripción Grupo Motor - Freno - Dínamo con Equipo Eléctrico y Tarjeta A/D - D/A Grupo Motor - Freno - Dínamo El motor CC es del tipo de imanes permanentes, con: • tensión máx. de alimentación: 30V; • velocidad máx. 1500 r.p.m.; • potencia erogada 50 W. El freno electromagnético posee las siguientes características: • par máximo de frenado 23 N cm; • corriente máxima de frenado 250 mA; • velocidad máxima 6000 r.p.m. • potencia máxima disipable 130 W. La dínamo taquimétrica suministra una señal de 20 mV/revolución. Motor, freno y dínamo están acoplados mediante juntas flexibles de acero e colocados en un contenedor de plexiglás transparente. DIDACTA Italia S.r.l. - Strada del Cascinotto, 139/30 - 10156 Torino - Italy Tel. +39 011 2731708 - Fax +39 011 2733088 - http://www.didacta.it - E-mail: [email protected] Equipo eléctrico El equipo eléctrico contiene la tarjeta de accionamiento PWM que actúa según el esquema de la fig. 1. Del esquema resulta la presencia de dos anillos de retroacción: • una retroacción interna de corriente para limitar la corriente circulante en el motor; • una retroacción externa de armadura o bien de velocidad. Es posible insertar o desinsertar un generador de rampa de pendencia variable para limitar el tiempo empleado en alcanzar la velocidad máxima programada mediante la señal de referencia. El equipo eléctrico comprende, además: • alimentador estabilizado 24 V, 5A; • alimentador de corriente constante para el freno, 150 mA máx.; • transductor de corriente de efecto Hall para medir la corriente de armadura; • amperímetro para medir la corriente absorbida por el motor; • amperímetro para medir la corriente de frenado; • voltímetro para medir la señal suministrada por la dínamo taquimétrica; • selectores, interruptores y potenciómetros de mando; • test points para medir las señales más importantes; • tarjeta de acondicionamiento señales para la adaptación de las señales adquiridas y generadas a la tarjeta A/D D/A; Tarjeta A/D D/A La tarjeta de conversión A/D D/A permite la generación, mediante el Ordenador, de las siguientes señales: • señal de referencia de velocidad; • señal de control de la corriente de frenado. y la adquisición de las siguientes señales: • tensión de alimentación del motor (tensión de armadura); • velocidad de rotación (señal taquimétrica); • corriente de frenado (par frenante); • corriente absorbida por el motor (corriente de armadura). La tarjeta dispone de 16 canales A/D y 2 canales D/A; actúa con una resolución de 12 bit y se conecta al Ordenador mediante la línea serial RS232. Software de gestión PWM El software de gestión PWM (ver fig. 2), que actúa en ambiente MS-Windows, permite observar el sistema en tiempo real mediante el diagrama de las señales adquiridas. Es posible, además, programar vía software la señal de referencia de velocidad y la corriente de frenado según perfiles diversos para valorar la consecuente respuesta del sistema. Los diagramas obtenidos pueden ser imprimidos en cualquier momento, mientras que los patrones de las señales adquiridas pueden ser salvados sobre file, en formato ASCII, o imprimidos. Software opcional PosAng para la conexión con el módulo Enco Mediante los cables en dotación, es posible utilizar la tarjeta de accionamiento PWM para pilotar el motor del módulo Enco (cód. 915924) y realizar un anillo de control de posición (ver fig. 3). De esta manera el Ordenador puede recibir una señal de posición desde el encoder y generar una señal de referencia de velocidad para la tarjeta PWM. El software PosAng permite dirigir el sistema así obtenido para obtener varias posiciones, controlando la velocidad de los desplazamientos. En particular es posible realizar los movimientos según un perfil de velocidad trapezoidal, es decir que prevé una fase de aceleración, una de velocidad constante y una de deceleración. El software actúa en ambiente MS-Windows y permite el salvamento sobre disquete y la impresión de datos y diagramas. 4. Experiencias • • • • • • • • Estudio de los diversos bloques funcionales que constituyen el sistema y del conjunto de componentes industriales utilizados; Estudio de las técnicas de control de motores con elevadas prestaciones dinámicas; Estudio del sistema con retroacción de velocidad y referencia interna, en presencia de variaciones de la carga externa; Estudio del sistema con retroacción de armadura y referencia interna, en presencia de variaciones de la carga externa; Estudio del sistema con retroacción de velocidad y referencia generada por el Ordenador, en presencia de variaciones de la carga externa; Estudio del sistema con retroacción de velocidad y con control de la carga desde el Ordenador. Efectos de la retroacción de corriente; Prueba del generador de rampa; Estudio de las técnicas para el control de posición de un motor CC con accionamiento PWM y encoder (con Módulo Enco y software opcional PosAng). Page 2 Fig.1 - Diagrama funcional de la tarajeta de accionamento PWM 5. Configuración Necesaria Ordenador Hardware • • PC IBM o compatible, mínimo Pentium con Hard Disk (>10Gb) y CD drive, tarjeta gráfica SVGA 800x600, ratón, RAM 32 MB, portal USB; Impresora gráfica. Software • MS-Windows ‘98 o succesivos. 6. Servicios Necesarios Alimentación eléctrica: 220/240 V CA - 50/60 Hz. • 7. Pesos y Dimensiones Dimensiones: 460 x 310 x h330 mm. Peso: 18 Kg. • • Fig.2 – Software de gestión PWM: prueba bajo carga con retroacción de velocidad Fig.3 – Esquema de conexión entre el módulo ENCO y el módulo PWM Cod. R00120/S 0998 Ed. 01 Rev. 02 La Didacta Italia en cualquier momento y sin preaviso puede efectuar variaciones que considere convenientes por exigencias de construccion o de didacticasiempre manteniendo las caracteristicas esenciales. Page 4