Document
Anuncio

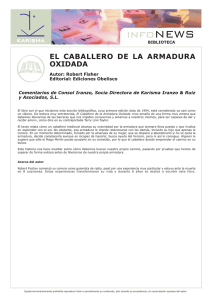
SISTEMAS DE CONTROL AUTOMÁTICO DACI-EPN Caso de estudio: Motor DC regulado por armadura 1 Referencias recomendadas • • 2 Cap. 4, pags. 171-183, Sistemas de Control Automático, KUO Benjamín, Séptima Edición. Cap3, pags. 38-48, , Sistemas de Control Continuos y Discretos, DORSEY John. Modelado matemático de un motor de dc Ya que los motores de dc se usan en forma extensa en sistemas de control, para propósitos de análisis, es necesario establecer modelos matemáticos para los mismos en aplicaciones de control. Se utilizará el diagrama equivalente de la Figura 1 para representar un motor de dc. La armadura está modelada como un circuito con resistencia Ra conectada en serie a una inductancia La, y a una fuente de voltaje ee que representa la fuerza contraelectromotriz en la armadura cuando el rotor gira. Ra + if = const La + ea T , ω, θ ee ia B Ecuaciones Diferenciales Sistema eléctrico: ea = Ra ia + La dia + ee dt ee = K e ⋅ ω Sistema mecánico: T = K ⋅ ia ⋅ i f = K T ⋅ ia , puesto que i f es constante T = J ⋅ ω& + B ⋅ ω Diagrama de Bloque: ea = Ra ia + La T = K T ⋅ ia dia + ee dt ⇒ Ea = Ra I a + sLa I a + Ee → Ia = 1 ( E a − Ee ) Ra + sLa ⇒ T = KT I a Caso de estudio: Modelo Híbrido. Motor DC regulado por armadura 1 SISTEMAS DE CONTROL AUTOMÁTICO DACI-EPN T = J ⋅ ω& + B ⋅ ω ⇒ T = JSω + Bω → ω= 1 T sJ + B E e = K eω Donde: P 1 Ra + sLa Ea Ia + + KT T 1 B + sJ Ee Ke mecánico eléctrico Diagrama de Flujo: ea = Ra ia + La dia + ee dt ⇒ i'a = − T = J ⋅ ω& + B ⋅ ω ⇒ ω& = − 1/La ea ) ia s−1 ia Ra R K 1 1 1 i a + ea − ee = − a i a + ea − e ω La La La La La La K 1 B B ω + T = − ω + T ia J J J J KT / J −Ra / La ω& s−1 ω s−1 θ −B / J −Ke / La Variables de estado: x1 ia = x2 ω i'a = − ω& = u = ea y =ω Ra K R K 1 1 ia + ea − e ω ⇒ x&1 = − a x1 − e x2 + u La La La La La La K K 1 B B B T − ω = T ia − ω ⇒ x& 2 = T x1 − x2 J J J J J J Caso de estudio: Modelo Híbrido. Motor DC regulado por armadura 2 SISTEMAS DE CONTROL AUTOMÁTICO DACI-EPN Donde: x& 1 − Ra La = x& K T 2 J Ke La B − J − x 1 1 + L a x 2 0 u x1 y = (0 1) x2 Función de transferencia: 1/ La x& 1 u s −1 x 1 KT / J x& 2 L1 s −1 L2 −Ra / La x2 ω s −1 −B/ J L3 −Ke / La L1 = − Ra −1 s La L2 = − B −1 s J L3 = − K T K e −2 s JLa R K K + Ra B − 2 B s ∆ = 1 − ( L1 + L2 + L3 ) + L1 L2 = 1 + a + S −1 + T e L J JL a a P1 = K T −2 S JLa ∆1 = 1 Entonces: K T −2 S JLa ω ( s) P∆ G ( s) = = 1 1 = U ( s) ∆ JR + BLa 1 + a JLa −1 K T K e + Ra B − 2 S + S JL a N (s) K T 1 G ( s) = K = ⋅ JR + BLa K K + Ra B D( s ) JLa S+ T e S 2 + a JLa JLa Caso de estudio: Modelo Híbrido. Motor DC regulado por armadura S2 ⋅ 2 S 3