Semáforos - the CLIP Lab
Anuncio

Semáforos
Lecturas:
Ben-Ari, secciones 4.1, 4.2, 4.3, 4.6
Andrews, intro. cap. 4 y sección 4.1
Manuel Carro
Universidad Politécnica de Madrid
Este texto se distribuye bajo los términos de la Creative Commons License
M. Carro (UPM)
Semáforos
1 / 20
Definición
Semáforos
Definición
Tipo abstracto de datos (Dijkstra)
Especificación de comportamiento:
sem ∈ N
Init(sem, n)
Wait(sem)
Signal(sem)
≡ h sem := n i
≡ h AWAIT sem > 0 → sem := sem - 1 i
≡ h sem := sem + 1 i
Código entre h· · · i: acción atómica
Init(sem, n): sólo inicialización valores
AWAIT Cond suspende tarea hasta cumplimiento de Cond
Wait(sem): suspende hasta que sem > 0, entonces decrementa
Signal(sem): incrementa sem
M. Carro (UPM)
Semáforos
2 / 20
Definición
Exclusión mutua con semáforos
X := ...; −−Compartida
Init (Mutex , 1); −−Nadie en sección crı́tica
Wait ( Mutex ) ;
−− S .C .
X := X + X;
S i g n a l ( Mutex ) ;
Invariante:
Mutex = 0 ↔ algún proceso en sección crı́tica
Wait:
Puede decrementar si sección crı́tica está libre
Suspende en otro caso
Signal:
Siempre puede incrementar
Puede rearrancar alguna tarea suspendida
M. Carro (UPM)
Semáforos
3 / 20
Definición
Semáforos
Clases e implementación
Binarios (sem ∈ {0, 1}): exclusión mutua
Generales (sem ∈ N ): sincronización más avanzada
Semáforos binarios: Signal cuando ya tiene un valor 1 → efecto
indefinido
No son parte nativa de Ada
Implementación (entre los ejemplos de la asignatura) como packages:
Bin Semaphore : binario
Semaphore : generales
Definen tipo paramétrico (para inicializar semáforo)
M. Carro (UPM)
Semáforos
4 / 20
Un interfaz de semáforos
Semáforos en Ada
Sólo diferencias sintácticas con el esquema ya visto:
−− V a r i a b l e compartida
X : Natural : = 1 ;
−− Sem áforo b i n a r i o i n i c i a l i z a d o a 1
Mutex : Bin Semaphore . Semaphore Type ( 1 ) ;
task type Add ;
task body Add i s
begin
Mutex . Wait ;
−− Entrada en s e c c i ó n c r ı́ t i c a
X := X + X;
−− Secci ón c r ı́ t i c a
Mutex . S i g n a l ; −− S a l i d a de s e c c i ó n c r ı́ t i c a
end Add ;
M. Carro (UPM)
Semáforos
5 / 20
Un interfaz de semáforos
Semáforos en Ada
Cuestiones sintácticas
Inicialización explı́cita en declaración de variable:
Mutex: Bin Semaphore.Semaphore Type(1);
Notación de objetos:
M. Carro (UPM)
Procedimientos
Objetos
Wait(Mutex)
Mutex.Wait
Signal(Mutex)
Mutex.Signal
Semáforos
6 / 20
Usando semáforos
Control de aparcamiento
Semáforos generales: sincronización
Binarios: exclusión mutua (ya sabı́amos hacerla)
Generales: misma definición (excepto que sem ∈ N ), más potencia
Ejemplo: aparcamiento 1 entrada / 1 salida
Barreras / detectores de entrada y salida
Permitir entrar coches (si hay sitio)
Descontar los que vayan saliendo
M. Carro (UPM)
Semáforos
Usando semáforos
7 / 20
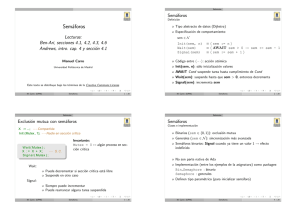
Control de aparcamiento
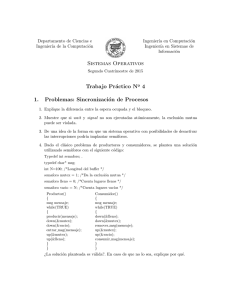
Operaciones externas, procesos, recursos
Aparcamiento
Barrera_Entrada
Barrera_Salida
Proceso
Entrada
Entrar
Abrir_Entrada
Salir
Estado
Aparcamiento
Proceso
Salida
Abrir_Salida
procedure Barrera Entrada: detecta coche a la entrada; bloqueante
procedure Abrir Entrada: abre la barrera de entrada
procedure Barrera Salida: detecta coche a la salida; bloqueante
procedure Abrir Salida: abre barrera saluda
Estado Aparcamiento: depende de la implementación
M. Carro (UPM)
Semáforos
Usando semáforos
8 / 20
Control de aparcamiento
Aparcamiento: solución 0
loop −− Entrada
Espacio : = False ;
Barrera Entrada ;
while not Espacio loop
i f N C < Max then
N C := N C + 1;
Espacio : = True ;
end i f ;
end loop ;
Abrir Entrada ;
end loop ;
N C : Tipo Tam : = 0 ;
loop −− S a l i d a
Barrera Salida ;
N C : = N C − 1;
Abrir Salida ;
end loop ;
M. Carro (UPM)
Semáforos
9 / 20
Usando semáforos
Control de aparcamiento
Aparcamiento: solución 1
Con un semáforo binario
loop −− Tarea e n t r a d a
Barrera Entrada ;
Espacio : = False ;
while not Espacio loop
Mutex . Wait ;
i f N C < Max then
N C := N C + 1;
Espacio : = True ;
end i f ;
Mutex . S i g n a l ;
end loop ;
AbrirE ;
end loop ;
Mutex : Semaphore Type ( 1 ) ;
N C : Tipo Tam : = 0 ;
loop −− Tarea s a l i d a
Barrera Salida ;
Mutex . Wait ;
N C : = N C − 1;
Mutex . S i g n a l ;
Abrir Salida ;
end loop ;
M. Carro (UPM)
Semáforos
Usando semáforos
Solución 1: protección de
10 / 20
Control de aparcamiento
NC
Recurso compartido: número
coches aparcados
while not Espacio loop
Mutex . Wait ;
i f N C < Max then
N C := N C + 1;
Espacio : = True ;
end i f ;
Mutex . S i g n a l ;
end loop ; −− Hay espacio
Acceso en exclusión mutua
Pero: aparcamiento lleno −→
espera activa
¿Llevar mutex fuera de bucle principal?
¿Encapsular sólo N C := N C + 1?
¿No encapsular Espacio := True?
M. Carro (UPM)
Semáforos
Usando semáforos
11 / 20
Control de aparcamiento
Solución 2
Mutex , No Lleno : Semaphore Type ( 1 ) ;
N C : Tipo Tam : = 0 ;
loop −− S a l i d a
Barrera Salida ;
Mutex . Wait ;
N C : = N C − 1;
i f N C = MAX − 1 then
No Lleno . S i g n a l ;
end i f ;
Mutex . S i g n a l ;
Abrir Salida ;
end loop ;
M. Carro (UPM)
loop −− Entrada
Barrera Entrada ;
No Lleno . Wait ;
Mutex . Wait ;
N C := N C + 1;
i f N C < Max then
No Lleno . S i g n a l ;
end i f ;
Mutex . S i g n a l ;
Abrir Entrada ;
end loop ;
Semáforos
12 / 20
Usando semáforos
Control de aparcamiento
Solución 2: fuego cruzado
Mutex: protege sección crı́tica
No Lleno: sincroniza (sincronización condicional)
No Lleno = 0 ←→ N C = MAX
(−→ bloqueo si aparcamiento lleno)
No Lleno = 0 sii ha entrado el último coche
No obvio — pero no hace espera activa
¿Intercambiar No Lleno.Wait y Mutex.Wait?
M. Carro (UPM)
Semáforos
Usando semáforos
13 / 20
Control de aparcamiento
Solución 3
Huecos : Semaphore . Semaphore Type ( Max ) ;
loop −− S a l i d a
Barrera Salida ;
Huecos . S i g n a l ;
Abrir Salida ;
end loop ;
loop −− Entrada
Barrera Entrada ;
Huecos . Wait ;
Abrir Entrada ;
end loop ;
Huecos.Wait permite paso si hay espacio
Huecos.Signal libera espacio
¿El poder de los semáforos?
Codificar con Peterson
Repetir análisis suponiendo que hay dos (o más) entradas
M. Carro (UPM)
Semáforos
Usando semáforos
14 / 20
Buffer acotado
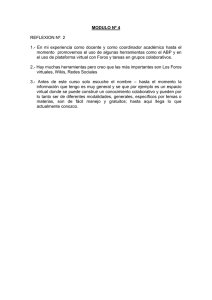
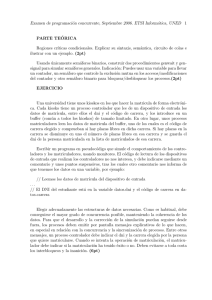
Buffer acotado
Cola acotada
Procesos leen y escriben
Productor
Consumidor
Buffer lleno: productor espera
Buffer vacı́o: consumidor espera
Buffer
Proceso
Productor
Poner(Item)
Tomar(Item)
Proceso
Consumidor
Estado
Buffer
M. Carro (UPM)
Semáforos
15 / 20
Usando semáforos
Buffer acotado
Solución 1: sólo exclusión mutua
Mutex : Bin Semaphore ( 1 ) ;
Buffer : Tipo Buffer ;
loop
P r o d u c i r ( Un Dato ) ;
Mutex . Wait ;
<< I n s e r t a en b u f f e r >>
Mutex . S i g n a l ;
end loop ;
loop
Mutex . Wait ;
<< Q u i t a de b u f f e r >>
Mutex . S i g n a l ;
U t i l i z a r ( Un Dato ) ;
end loop ;
Precondiciones secuenciales
vs.
Precondiciones concurrencia
M. Carro (UPM)
Semáforos
Usando semáforos
16 / 20
Buffer acotado
Solucion 2
Mutex :
Buffer :
Vacios :
Llenos :
Semáforos con dos misiones
diferentes
Bin Semaphore ( 1 ) ;
Tipo Buffer ;
Semaphore ( Max ) ;
Semaphore ( 0 ) ;
Esencialmente, aparcamiento
simétrico
Pero: estructura de datos
separada de semáforo
loop −− P r o d u c t o r
P r o d u c i r ( Un Dato ) ;
Vacios . Wait ;
Mutex . Wait ;
<<I n s e r t a en b u f f e r >>
Mutex . S i g n a l ;
Llenos . S i g n a l ;
end loop ;
M. Carro (UPM)
loop −− Consumidor
Llenos . Wait
Mutex . Wait ;
<<Q u i t a de b u f f e r >>
Mutex . S i g n a l ;
Vacios . S i g n a l
Consumir ( Un Dato ) ;
end loop ;
Semáforos
Usando semáforos
17 / 20
Buffer acotado
Buffer de un dato
Dato : Tipo Dato ;
Lleno : Bin Semaphore ( 0 ) ;
Vacio : Bin Semaphore ( 1 ) ;
loop −− P r o d u c t o r
P r o d u c i r ( Un Dato ) ;
Vacio . Wait ;
Dato : = Un Dato ;
Lleno . S i g n a l ;
end loop ;
loop −− Consumidor
Lleno . Wait
Este Dato : = Dato ;
Vacio . S i g n a l ;
Consumir ( Este Dato ) ;
end loop ;
Establecer invariantes
¿Por qué es más simple que el buffer general?
M. Carro (UPM)
Semáforos
18 / 20
Ventajas e inconvenientes
Semáforos desde la lejanı́a
Algo truculentos y de bajo nivel
Pero ampliamente disponibles (POSIX, API Win32)
Sincronización condicional ad-hoc
Linealización siempre posible, pero a veces no clara
Mezclada con exclusión mutua
Para implementar abstracciones de nivel superior
M. Carro (UPM)
Semáforos
19 / 20
Ventajas e inconvenientes
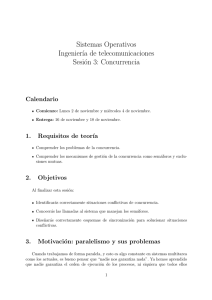
Ejercicio: buffer par/impar
Productor de números pares e impares (en cualquier orden)
Consumidores:
I
I
Uno necesita números pares
Otro necesita números impares
Buffer
Proceso
Productor
Consumidor
Pares
Tomar_Par(Item)
Poner(Item)
Tomar_Impar(Item)
Estado
Buffer
Consumidor
Impares
Usar un buffer de un dato
M. Carro (UPM)
Semáforos
20 / 20