Documento 8083732
Anuncio

Resumen de Bode
La función de transferencia senoidal se presenta mediante dos gráficas
distintas que muestran el comportamiento de la función de transferencia a
bajas y altas frecuencias:
1.- Una gráfica que ofrece la magnitud logarítmica de G(jω) (en decibeles
dB) contra la frecuencia.
2.- Otra gráfica que muestra el ángulo de fase (en grados) contra la
frecuencia.
En las trazas de Bode, las razones de frecuencia se expresan en términos de
décadas. Una década es una banda de frecuencia de 1ω a 10ω donde ω es
cualquier frecuencia.
Para calcular la magnitud |G(jω)| = 20 log |G(jω)|.
.a
r
Condiciones para el uso de Bode
nr
te
cn
ol
og
i
co
.c
om
El criterio de estabilidad de Bode es sólo aplicable a aquellos sistemas de fase
mínima. Para los sistemas de fase no mínima deben aplicarse otros métodos
de análisis de respuesta en frecuencia, por ejemplo criterio de estabilidad de
Nyquist.
Características
ht
tp
://
ap
un
te
ca
.m
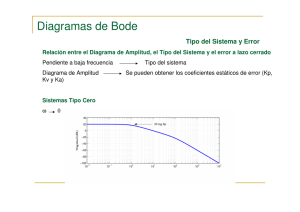
• Permite predecir el comportamiento de un sistema en lazo cerrado a
partir de la FTLA.
• El diseño de un sistema de control mediante diagramas de Bode
requiere que el mismo sea estable en lazo abierto.
• Ya que la |G(jω)| se expresa en dB, los factores de producto y división se
vuelven suma y resta respectivamente por ser logaritmos por lo que las
gráficas de bodes de términos individuales se pueden sumar y restar
para obtener para conocer la función compuesta.
• La gráfica |G(jω)| se puede aproximar asintóticamente mediante
segmentos de línea recta lo que permite bosquejar sin cálculos
detallados. Y se ajusta por errores de entre 3 y 6 dB.
• En los factores de primer orden, la frecuencia a la cual se cruzan las
rectas asintóticas se denomina frecuencia de corte y es donde se
presenta el error máximo entre la respuesta real y las rectas. Puede
ajustarse en 3dB.
• En los factores de segundo orden, la frecuencia de corte es ω=ωn. En
este punto la magnitud es -20 log (2ξ).
1
Factores básicos
•
•
•
•
•
•
•
•
Ganancia K
Factores integrales 1/s
Factores derivativos s
Factores de primer orden polo simple 1/(1+Ts) (ATRASO)
Factores de primer orden cero simple (1+Ts) (ADELANTO)
Factores de segundo orden polo 1/(s^2 + s + 1) (ATRASO)
Factores de segundo orden cero (s^2 + s + 1) (ADELANTO)
Factores de retardo e^(-st)
ht
tp
://
ap
un
te
ca
.m
om
.c
nr
te
cn
ol
og
i
co
Si la función de transferencia es G(s) = K
Entonces G(jω)=K donde K > 0
La magnitud |G(jω)| = 20log(K) en dB por lo que si
K > 1 la magnitud será en dB será > 0
Y si K < 1 la magnitud en dB será < 0
.a
r
Ganancia K
2
Factores integrales 1/s
ht
tp
://
ap
un
te
ca
.m
nr
te
cn
ol
og
i
co
.c
om
.a
r
La función de transferencia es G(jω)=1/(jω)
La magnitud |G(jω)|= 20log|(1/jω)| = 20log|(jω)^(-1)| = -20log|(ω)|
En cuanto a la fase si G(jω)= 1/(jω) = (jω)^(-1) = -j *(1/ ω) = -90º para todo ω
Analizándolo por décadas:
ω
|G(j ω)| en dB
1/10 20
1
0
10
-20
100
-40
Por lo que la gráfica es una recta de pendiente negativa, disminuye
20dB/década.
3
Factores derivativos s
La función de transferencia es G(jω)=(jω)
La magnitud |G(jω)|= 20log|(jω)|
En cuanto a la fase si G(jω)= (jω) = 90º para todo ω
Analizándolo por décadas:
ω
|G(j ω)| en dB
1/10
-20
1
0
10
20
100
40
ht
tp
://
ap
un
te
ca
.m
nr
te
cn
ol
og
i
co
.c
om
.a
r
Por lo que la gráfica es una recta de pendiente positiva, aumenta 20dB/década.
4
Factores de primer orden polo simple 1/(1+Ts)
Si G(jω)= 1/(1+Ts) = 1/(1+Tjω)
|G(jw)|= 1/(1+T^2*ω^2)^(1/2)
|G(jw)| en dB = 20log(1/(1+T^2*ω^2)^(1/2)) = 20log((1+T^2*ω^2)^(-1/2)) =
= (-1/2)*20log(1+T^2*ω^2) = -10log(1+T^2*ω^2)
Para bajas frecuencias, la magnitud será 0 porque el logaritmo es cercano a 1.
Para altas frecuencias, sumar 1 será despreciable y por lo tanto:
|G(j ω)| = -10log(T^2* ω ^2) = -10log(T* ω)^2 = -20log(T* ω)
Analizando por décadas
ω
1/T
10/T
100/T
1000/T
om
.a
r
-20log(T* ω)
0
-20
-40
-60
ca
.m
nr
te
cn
ol
og
i
co
.c
Por lo que a partir de 1/T la gráfica de magnitud tiene una pendiente negativa,
disminuye 20dB/década.
Analizando el argumento
Si G(jω) = 1/(1+Ts) = 1/(1+Tjω)
Multiplicando por el conjugado (1-Tjω) al numerador y al denominador:
G(jω) = (1-jωT)/(1+ω^2T^2)
Entonces
<G(jω)= tan^(-1) { [ (-ωT)/(1+ω^2T^2)] / [1/(1+ω^2T^2) ] }
= tan^(-1) (-ωT) = -tan^(-1) (ωT)
ht
tp
://
ap
un
te
Analizando los valores extremos de la frecuencia
5
ω
0
1/T
infinito
<G(j ω)
0º
-45º
-90º
6
ht
.m
ca
un
te
ap
://
tp
.c
co
nr
te
cn
ol
og
i
om
.a
r
Factores de primer orden cero simple (1+Ts)
Si G(jω)= (1+Ts) = (1+Tjω)
|G(jw)|= (1+T^2*ω^2)^(1/2)
|G(jw)| en dB = 20log((1+T^2*ω^2)^(1/2)) =
= (1/2)*20log(1+T^2*ω^2) = 10log(1+T^2*ω^2)
Para bajas frecuencias, la magnitud será 0 porque el logaritmo es cercano a 1.
Para altas frecuencias, sumar 1 será despreciable y por lo tanto:
|G(j ω)| = 10log(T^2* ω ^2) = 10log(T* ω)^2 = 20log(T* ω)
Analizando por décadas
ω
1/T
10/T
100/T
1000/T
om
.a
r
20log(T* ω)
0
20
40
60
nr
te
cn
ol
og
i
co
.c
Por lo que a partir de 1/T la gráfica de magnitud tiene una pendiente positiva,
aumenta 20dB/década.
Analizando el argumento
Si G(jω) = (1+Ts) = (1+Tjω)
Entonces
<G(jω)= tan^(-1) [ (ωT) / 1 ]
= tan^(-1) (ωT)
ca
ω
.m
Analizando los valores extremos de la frecuencia
ht
tp
://
ap
un
te
0
0º
1/T
45º
infinito 90º
7
<G(j ω)
.a
r
om
.c
co
nr
te
cn
ol
og
i
.m
ca
un
te
Es posible generalizar el análisis para cualquier exponente “n”
Argumento
Asíntonta de baja frecuencia en
0 dB.
Asíntota de alta frecuencia con
pendiente -20*n dB/década
Asíntonta de baja frecuencia en
0 dB.
Asíntota de alta frecuencia con
pendiente 20*n dB/década
Se multiplica
por n para
todo ω
://
ht
tp
(1+jωT)^(-n)
Pendiente
ap
Factor
(1+jωT)^(+n)
8
Se multiplica
por n para
todo ω
Frecuencia
de corte
1/T
1/T
Factores de segundo orden polo 1/(s^2 + s + 1)
Si G(s) = 1/(s^2 + s + 1)
G(jω) = 1 / [ 1 + 2 ξ ω j /ωn + (ωj/ωn) ^2]
|G(jω)| en dB = 20log (1 / { [ 1 - (ω/ωn)^2 ]^2 + 4 ξ^2 (ω/ωn)^2 }^(1/2) ) =
= 20log ( { [ 1 - (ω/ωn)^2 ]^2 + 4 ξ^2 (ω/ωn)^2 }^(-1/2) ) =
= -10 log { [ 1 - (ω/ωn)^2 ]^2 + 4 ξ^2 (ω/ωn)^2 }
Para bajas frecuencias |G(jω)| = -10log(1) = 0
Para altas frecuencias |G(jω)| = -10log((ω/ωn)^4) = -40log(ω/ωn)
ω
nr
te
cn
ol
og
i
co
.c
om
.a
r
|G(jω)|
ωn
0
10ωn
-40
100ωn
-80
Por lo tanto para altas frecuencias la magnitud tiene una pendiente negativa,
disminuye 40db/década.
En cuanto al argumento
Si G(jω) = 1 / [ 1 + 2 ξ ω j /ωn + (ωj/ωn) ^2]
= [ 1 + 2 ξ ω j /ωn + (ωj/ωn) ^2]^(-1)
= [ 1+ 2 ξ ω j /ωn – (ω/ωn)^2 ]
<G(jω)= -tan^(-1)( [2ξω/ωn ] / [ 1 – (ω/ωn)^2 ])
ht
tp
://
ap
un
te
ca
.m
ω
0
ωn
Infinito
9
<G(jω)
0
-90º
-180
.a
r
om
.c
co
nr
te
cn
ol
og
i
.m
ca
un
te
ht
tp
://
ap
En la gráfica de magnitud, a medida que ξ aumenta, el pico disminuye.
En la gráfica de fase, a medida que ξ aumenta, la curva de fase será más suave.
10
Factores de segundo orden cero (s^2 + s + 1)
Si G(s) = (s^2 + s + 1)
G(jω) = [ 1 + 2 ξ ω j /ωn + (ωj/ωn) ^2]
|G(jω)| en dB = 20log ( { [ 1 - (ω/ωn)^2 ]^2 + 4 ξ^2 (ω/ωn)^2 } ^(1/2) ) =
= 10 log { [ 1 - (ω/ωn)^2 ]^2 + 4 ξ^2 (ω/ωn)^2 }
Para bajas frecuencias |G(jω)| = 10log(1) = 0
Para altas frecuencias |G(jω)| = 10log((ω/ωn)^4) = 40log(ω/ωn)
ω
ωn
10ωn
100ωn
|G(jω)|
0
40
80
nr
te
cn
ol
og
i
co
.c
om
.a
r
Por lo tanto para altas frecuencias la magnitud tiene una pendiente positiva,
aumenta 40db/década.
En cuanto al argumento
Si G(jω) = 1 / [ 1 + 2 ξ ω j /ωn + (ωj/ωn) ^2]
= [ 1 + 2 ξ ω j /ωn + (ωj/ωn) ^2]^(-1)
= [ 1+ 2 ξ ω j /ωn – (ω/ωn)^2 ]
<G(jω)= -tan^(-1)( [2ξω/ωn ] / [ 1 – (ω/ωn)^2 ])
ht
tp
://
ap
un
te
ca
.m
ω
0
ωn
Infinito
11
<G(jω)
0
90º
180
.a
r
om
.c
co
nr
te
cn
ol
og
i
.m
ca
un
te
ht
tp
://
ap
En el gráfico de magnitud, cuando ξ aumenta el pico disminuye.
En el gráfico de fase, a medida que ξ aumenta la curva de fase será más
pronunciada.
12
Factores de retardo e^(-st)
G(jω) = e^( -jωt )
|G(jω)| en dB = 20 log | e^(-jωT) | = 20 log | cos(ωT) – jsen(ωT) | =
= 20 log { [ cos^2(ωT) + sen^2(ωT) ] ^(1/2) } =
Por identidad trigonométrica
= 20 log 1 = 0 dB
Por lo tanto el factor de retardo no afecta la curva de magnitud, no atenua ni
amplifica.
.a
r
En cuanto al ángulo de fase,
Si G(jω) = e^( -jωt ) = cos(ωT) – jsen(ωT)
<G(jω) = tan^(-1)[ - sen(ωT) / cos(ωT) ] =
= - tan^(-1)[ sen(ωT) / cos(ωT) ] = -tan^(-1)[ tan(ωT)] = - ωT
ht
tp
://
ap
un
te
ca
.m
nr
te
cn
ol
og
i
co
.c
om
El desfase es directamente proporcional a la frecuencia por eso su forma es
una curva exponencial negativa que no tiende de manera asintótica a ningún
valor final.
Criterio de estabilidad de Bode
Un sistema de control es inestable si la respuesta en frecuencia del sistema en
lazo abierto exhibe una relación entre las amplitudes de salida y entrada (AR)
que excede a la unidad a una frecuencia para la cual es defasaje es de 180º.
Esta frecuencia es llamada frecuencia de cruce de fase.
El criterio de estabilidad de Bode es solo aplicable en sistemas para los cuales
su ganancia y defasajes decrecen continuamente con la frecuencia.
Un sistema de primer orden siempre será estable ya que la relación entre las
amplitudes de salida y entrada AR es < = 1 y φ < 90º.
Un sistema de segundo orden siempre será estable ya que el φ < 180º
13
Márgenes de fase y ganancia en Bode
El margen de fase γ = φ + 180º implica que si la curva del argumento no corta la
línea de +- 180º el sistema es estable; de lo contrario, tendremos un margen de
fase hasta llegar a una situación de inestabilidad.
Margen de ganancia Kg: es la inversa de magnitud de |G(jω)| a la frecuencia de
cruce del gráfico de fase, o sea ω1 tal que φ= -180º entonces
1/Kg = 20 log |G(jω1)| en φ. Este margen indica cuanto se puede incrementar la
ganancia hasta que el sistema se torne inestable.
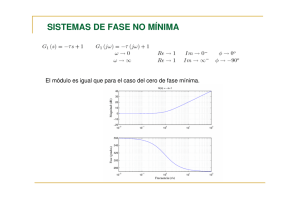
Sistemas de fase mínima y de fase no mínima
://
ap
un
te
ca
.m
nr
te
cn
ol
og
i
co
.c
om
.a
r
Las funciones de transferencia que no tienen ni polos ni ceros en el semiplano
derecho del plano s son funciones de transferencia de fase mínima, de lo
contrario son de fase no mínima. Los sistemas con funciones de transferencia
de fase mínima se denominan sistemas de fase mínima, en cambio los que
poseen funciones de transferencia de fase no mínima se denominan sistemas
de fase mínima.
Los sistemas de fase no mínima son lentos en su respuesta debido a su
comportamiento defectuoso al inicio de la respuesta.
En forma práctica existen dos formas para determinar si un sistema es o no de
fase mínima:
1.- Determinación de polos y ceros de la función de transferencia en lazo
abierto. No deben existir polos ni ceros en la mitad derecha del plano s.
2.- Mediante el análisis de asíntotas en los gráficos de Bode. Si cuando la
frecuencia tiende a infinito la pendiente de la curva de magnitud tiende a 20*(q-p) dB/década y el ángulo de fase tiende a -90º*(q-p) donde p es el grado
del numerador y q es el grado del denominador de la función de transferencia
G(s).
ht
tp
Bode para controladores
Controlador Proporcional Integral
C(s) = Kp [ 1 + 1 / (Ti * s) ] =
= Kp [ (Ti *s + 1) / (Ti * s) ] =
= Kp [ (s + 1/Ti) / s ]
= Kp ( s + zi ) / s
Por lo que se diagraman
1. Un factor proporcional Kp.
2. Un factor de primer orden cero simple (s+zi).
3. Un factor integral 1/s
14
.a
r
om
.c
co
nr
te
cn
ol
og
i
.m
ca
un
te
ht
tp
://
ap
En azul se dibuja el controlador.
En verde el factor proporcional Kp
En celeste el factor integral 1/s
En rojo el factor de primer orden cero simple.
Controlador Proporcional Derivativo
C(s)= Kp (1+Td * s) =
= Kp/Td (1/Td + s) =
= K (s + zi)
Por lo que se diagraman
1. Un factor de ganancia K
2. Un factor sistema de primer orden cero simple (s + zi)
15
.a
r
om
.c
co
nr
te
cn
ol
og
i
.m
ca
un
te
ht
tp
://
ap
En rojo la gráfica del controlador
En azul se grafica el factor proporcional
En verde se grafica el factor de primer orden cero simple
Bode para sistemas de tercer orden
Pueden presentar inestabilidad ya que el diagrama de fase de 3 sistemas
lineales (orden de s es 1) posibilitan que la gráfica de fase supere los 180º y se
aplique el criterio de estabilidad de Bode cuando para sistemas de 1º y 2º
orden el criterio siempre da estabilidad. Esto es posible porque al expresar la
función de transferencia como un producto y luego representarla
logarítmicamente, la suma de los ángulos puede aproximarse a los 270º.
16