Instituto Politécnico Nacional Unidad Profesional
Anuncio

Instituto Politécnico Nacional
Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías
Avanzadas
Reporte final del proyecto: Diseño de una Interfaz Entre un Sensor de Imágenes CMOS y
Dispositivos de Lógica Programable para Procesamiento de Imágenes en Tiempo Real
Registro asignado por la SIP: 20071559
Director del Proyecto de Investigación: Victor Hugo Ponce Ponce (UPIITA-IPN)
Profesores participantes:
1. Juan Antonio Jaramillo Gómez (UPIITA-IPN)
2. Herón Molina Lozano (UPIITA-IPN)
3. Isaac Guzmán Domínguez (UPIITA-IPN)
Alumno participante: Oscar Manuel Rojas Padilla (UPIITA-IPN)
Introducción
El desarrollo de sistemas de procesamiento de imágenes en tiempo real es una tarea que se
requiere a nivel laboratorio y a nivel industrial. Por lo que es necesario contar con una
infraestructura que permita realizar tareas como lo son:
1. Captura de imágenes con restricción de tiempo
2. Procesamiento de imágenes
3. Reconocimiento de patrones
4. Realización de acciones de control basadas en las imágenes que se capturan
De manera tradicional para realizar la captura de imágenes se puede realizar por medio de
cámaras de video con tecnología de Dispositivos de Carga Acoplados (Charge Couple DevicesCCD por sus siglas en Inglés). Sin embargo este tipo de cámaras está llegando a sus límites
tecnológicos, esto es, se pueden llegar a capturas hasta decenas de imágenes por segundo. Otro tipo
de tecnología que actualmente está teniendo mucho auge es la relacionada con cámaras de video
que utilizan transistores CMOS (Complemented Metal-Oxide Semiconductor). El número de
imágenes que se ha llegado a capturar es de 1000 imágenes por segundo. Por lo que es necesario
para el desarrollo del país incursionar en este tipo de tecnologías.
Métodos y Materiales
Para el manejo de las cámaras CMOS es necesario realizarlo con sistemas digitales que
permitan manejar con restricción de tiempos, esto es en tiempo real. Por lo que se propuso
implementar este tipo de sistema utilizando Arreglos de Compuertas Programables en Campo
(Field Programable Gate Arrays FPGA’s), utilizando programación en VHDL, que es un estilo de
programación estandar para la programación de FPGA’s.
Se utilizó una tarjeta Spartan 3E de la compañía Digilen que utliza un FPGA de la compañía
Xilinx. El C.I. que se utilizó es el FGG320A.
El siguiente reporte presenta las actividades realizadas en relación al proyecto.
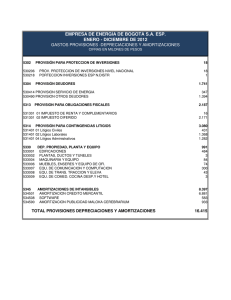
Diagrama a cuadros del sistema
Se presenta a continuación el diagrama a cuadros del sistema completo.
Imagen
480 X 640 X 3
Serial
Bus 1 bit
Registro de
corrimiento
universal de
16 bits
Preset = 0x01
MSB
Bus 16 bits
Latch de 16 bits
Triple estado
clk
Mux 16,2
Desborde
clk
Contador de
12 bits
Bus 12 bits
(ADRES)
Bus 16 bits
(DATA)
Contador de
4 bits con bit de
desborde y
Preset = 0x01
Bus 4 bit
RAM
Latch de 16 bits
Triple estado
Bus 16 bits
Registro de
corrimiento
universal de
16 bits
Clk_div
Bus 1 bit
Div de reloj
Funciones para
impresión en
pantalla
* Sinc H
* Sinc V
* RGB
Display
La idea básica consiste en utilizar una cámara CMOS de 680 por 480 pixeles. La cámara
envía la imagen a un registro de corrimiento de 16 bits en donde cada píxel es capturado y
posteriormente enviada a un match también de 16 bits y a un multiplexor de 16 por 2. Del latch de
16 bits se envía la información de cada píxel a una memoria RAM de 16 bits. Para ir acceder a cada
dirección de la memoria se utiliza un contador de 12 bits, con lo que pueden guardarse hasta 4096
bits. Posteriormente, se utilizará un controlador que permite enviar cada píxel a un monitor tipo
CGA.
A continuación se presenta los resultados obtenidos con el controlador de la pantalla. Para
comenzar a recobrar las imágenes se utilizó de manera momentánea una computadora. La
computadora utiliza una cámara de video. Y posteriormente se utilizó el puerto USB para el envío
de datos a la tarjeta Spartan 3E.
Resultados
Control de una pantalla VGA mediante una tarjeta “Espartan 3E”
Fundamentos teóricos
La tarjeta E3 dispone de un conector DB15 cableado a puertos de la FPGA. Dicho conector
permite la conexión con la pantalla del PC utilizando un cable estándar VGA.
La conexión entre la FPGA utilizará cinco puertos: HS (sincronismo horizontal), VS
(sincronismo vertical), R (rojo), G (verde) y B (azul).
Teóricamente, Las señales de color (R, G y B) son analógicas y determinan la intensidad de
color de cada píxel. Sin embargo, en la placa están conectadas a un puerto digital (entre 0 y 3.3V) a
través de una resistencia de 270Ω. Al estar el cable VGA terminado a 75Ω, un ‘1’ en la FPGA fijará
una señal de 0.7V (máxima intensidad de color) y un ‘0’ será 0V. Por tanto, tendremos sólo dos
niveles por color, pudiendo representar hasta 8 colores como se muestra.
Monitor VGA en modo 640x480
En este apartado se explicará cómo deben generarse las señales HS, VS, R, G y B para
representar una imagen en un monitor en modo 60Hz, 640x480 y 8 colores. Es decir. Para explicar
el protocolo VGA es necesario conocer el funcionamiento básico de un Tubo de Rayos Catódicos
(CRT)
Tres cañones de electrones producen tres haces de electrones, uno por cada color básico
(rojo, azul y verde). Estos haces de electrones se focalizan, utilizando una bobina, para conseguir
que converjan en un punto de la pantalla. Posteriormente, mediante un campo magnético generado
por un par de bobinas (horizontal y vertical) se direccionan al punto deseado de la pantalla. En la
pantalla de visualización, los rayos son separados por una máscara e inciden en una capa
fosforescente con zonas receptivas para cada color.
Por otro lado, la intensidad luminosa dependerá de la potencia a la que se emite el haz de
electrones, controlable mediante las señales analógicas R, G y B.
Se representarán imágenes en pantalla haciendo que el haz de electrones la recorra en una
sucesión de líneas (de izquierda a derecha) comenzando por la esquina superior izquierda.
La onda en forma de diente de sierra representa la corriente que pasa por la bobina que crea
que campo magnético para la deflexión horizontal. Se puede comprobar, que se representa la
imagen (Horizontal display time) cuando el haz de electrones va de izquierda a derecha y está
apuntando correctamente a la pantalla, existiendo un tiempo (retrace time) para que el cañón vuelva
al comienzo de la siguiente línea. El pulso de sincronismo vertical (HS) marca el instante en que el
cañón debe comenzar una nueva línea, pudiendo distinguir un tiempo anterior (“front porch”) en
que el cañón está apuntando fuera de la pantalla y un tiempo posterior (“pack porch”) necesario
para que el haz se posicione en el inicio de la siguiente línea.
Es importante que durante todo el “retrace time” los cañones de electrones estén apagados.
La frecuencia a la que se proporcionan los pulsos de sincronismos vertical y horizontal
determina la velocidad y el número de veces que el haz de electrones recorre la pantalla. De esta
forma seleccionamos la resolución de visualización de la imagen en el monitor. El estándar VGA
admite diferentes soluciones, para las que tendríamos que utilizar diferentes frecuencias en HS y
VS.
Funcionamiento del programa de control de VGA
Se realizó un programa en VHDL que recibe una señal de tres bits genera el protocolo para
la transmisión a la pantalla VGA y se transmite.
Librerías del programa
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
Declaración de señales, constantes
entity vga is
port ( clk: in std_logic;
Video : in std_logic_vector (1 downto 0);
shor, sver : out std_logic;
RGB : out std_logic_vector (2 downto 0));
end vga;
architecture Arq_vga of vga is
constant hpixels: std_logic_vector(9 downto 0) := "1100100000";
--Valor de pixeles en linea horizontal (800)
constant vlines: std_logic_vector(9 downto 0) := "1000001001";
--Numero de lineas horizontales en pantalla (521)
constant hbp: std_logic_vector(9 downto 0) := "0010010000";
--Limite horizontal inferior (144)
constant hfp: std_logic_vector(9 downto 0) := "1100010000";
--Limite horizontal superior (784)
constant
vbp: std_logic_vector(9 downto 0) := "0000011111";
--Limite vertical inferior
( 31)
constant vfp: std_logic_vector(9 downto 0) := "0111111111";
--Limite vertical superior
(511)
signal conh: std_logic_vector(9 downto 0) := (others=>'0');
--Contadores horizontal
signal conv: std_logic_vector(9 downto 0) := (others=>'0');
--Contador vertical
signal clkdiv: std_logic := '0';
--Señal de reloj de 25MHz
signal vidon: std_logic := '0';
--Permite establecer la habilitación para la señal de video
signal vsenable: std_logic := '0';
--Habilita el contador vertical
begin
Divisor de reloj para que coincida con el del monitor VGA, de 50 MHz a 25MHz.
process(clk)
begin
if(clk = '1' and clk'event) then
clkdiv <= not clkdiv;
end if;
end process;
Contador horizontal
process(clkdiv)
begin
if(clkdiv = '1' and clkdiv'event) then
if conh = hpixels then
--Numero de pixeles en linea horizontal
conh <= (others=>'0');
--Resetea el contador
vsenable <= '1';
--Habilita el contador vertical
else
conh <= conh + 1;
--Incrementa el contador horizontal
vsenable <= '0';
--Deshabilita el contador vertical
end if;
end if;
end process;
Pulso de sincronia horizontal
shor <= '1' when conh(9 downto 7) = "000" else '0';
Contador vertical
process(clkdiv)
begin
if(clkdiv = '1' and clkdiv'event and vsenable = '1') then
if conv = vlines then
--Numero de lineas verticales
conv <= (others=>'0');
--Resetea el contador
else conv <= conv + 1;
--Incrementa el contador vertical
end if;
end if;
end process;
Pulso de soncronía vertical
sver <= '1' when conv(9 downto 1) = "000000000" else '0';
Transmision de pixceles
RGB <= Video when
(conh > hbp and conh < hbp and
conv > vbp and conv < vbp and
vidon ='1') else "000";
Habilita la señal de video solo en los margenes de visualizacón
vidon <= '1' when
(((conh > hbp) and (conh < hfp)) or
((conv > vbp) and (conv < vfp))) else '0';
Fin del Programa
end Arq_vga;
Dispositivo USB
Actualmente en el mercado existen diversos dispositivos programables a diferentes niveles
que nos proporcionan la interfaz a una PC por medio del puerto USB, dejando atrás a los puertos
paralelo y serial, estos dispositivos son más versátiles, es por eso que su producción y
popularización se vuelve más grande cada día, y es por esto mismo que elegimos uno de estos
dispositivos para el proyecto que se realizó.
Para elegir adecuadamente el dispositivo que a utilizar en esta etapa del proyecto, fue
necesario el comprender en buena parte el protocolo de comunicación del puerto USB, una vez que
se observaron y analizaron cada una de las aplicaciones y los recursos que este protocolo podía
entregar se optó por la búsqueda de dispositivos que funcionarán como un dispositivo esclavo, el
cual es reconocido por el HOST y este le asigna una dirección a la cual le enviará los datos de
lectura o escritura, según sea el caso.
La razón de elegir un dispositivo que funcione como esclavo y no como HOST, fue el hecho
de realizar pruebas de envío y recepción de imágenes a través de la PC hacia el FPGA Spartan-3E,
por medio de la interfaz que se desarrolló; y no de forma independiente, como de una cámara
directamente hacia el FPGA, donde el uso de la PC podría quedar atrás y únicamente se necesitaría
la interfaz entre estos dos.
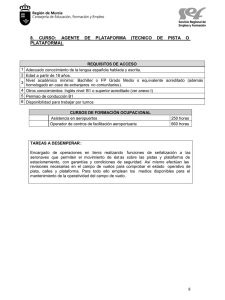
El dispositivo programable que se seleccionó, el micro controlador PIC18F4550, cuenta con
el modulo USB apropiado, ya que funciona con el protocolo USB 2.0, con una velocidad de
transmisión de 12MB/s, es decir la Full speed de ese mismo protocolo.(Para más detalles ver
ANEXO 1)
PIN out del PIC18F4550
Interfaz USB
Software del Microcontrolador
Una vez elegido el dispositivo que se empleará, en función de su arquitectura tendremos que
ver la configuración que nos conviene utilizar, es decir los puertos, módulos, etc., así como el uso
de la memoria disponible.
Este microcontrolador cuenta con cinco puertos de comunicación, puerto A, puerto B, puerto
C, puerto D y puerto E; de los cuales, por el momento utilizamos el puerto B, por la versatilidad que
ofrece tanto en el acomodo de los pines, como en la cantidad de bites que puede transmitir, ocho
para ser precisos, los necesarios para un protocolo de puerto paralelo mismo que maneja el FPGA
Spartan-3E, además de que las funciones secundarias que este posee no nos serán de interés, hacen
del puerto B de este micro controlador la mejor opción para el trabajo.
El funcionamiento de la interfaz USB de este dispositivo, es fácil de controlar y configurar
gracias a que los fabricantes ya han dispuesto, al igual que los de otros dispositivos similares, las
bibliotecas y controladores necesarios para la configuración de estos módulos, ya sea que
funcionen como dispositivos esclavos o maestros. Es de esta manera en la que al iniciar con la
programación del PIC18F4550, lo primero que se hace es incluir la biblioteca del controlador del
dispositivo y posteriormente la que controla el modulo del USB en cualquier forma, inclusive hay
algunas aplicaciones que nos ayudan a configurar el puerto de salida de los datos.
En el ANEXO 2 se puede encontrar el código del programa principal en lenguaje
ensamblador, para hacer que el PIC reciba los datos de la PC en mediante el puerto USB y
posteriormente los convierta a 8 bits (paralelo), para que a su vez los mande a través del puerto B
hacia otro dispositivo.
Driver
Para poder lograr una comunicación exitosa entre la PC y el PIC, se debe de generar un
driver o controlador, esto es necesario, pues cuando se conecta el hardware a la PC, se activa una
interrupción más en la lista de dispositivos externos e inmediatamente esta buscará dentro de una
lista de controladores cual es el requerido por el sistema, aunque existen controladores genéricos,
como los son para mouse, teclados o dispositivos de almacenamiento externo, el dispositivo que
nosotros hemos desarrollado no cumple con ninguna de estas características, por lo que se vio la
necesidad de generar un controlador especifico para él.
La función de este controlador será una vez que halla sido reconocido el dispositivo por el
sistema operativo, crear dentro de la lista de puertos de comunicación serial (RS-232), un puerto
nuevo, conocido como COM4, el cuatro fue escogido ya que ninguna computadora actual tiene
más de dos puertos de este tipo. Es mediante este puerto serie virtual, del que enviaremos datos
hacia nuestro sistema. Ir al ANEXO 3 para ver el controlador generado.
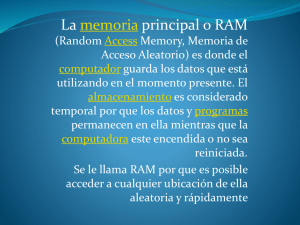
Hardware
Una vez concluido y descargado el programa en el dispositivo, se procedió a la elaboración
de la tarjeta mediante la cual se comunicaría la PC hacia la tarjeta del FPGA. Para la elaboración de
esta, solo se necesitó tomar en cuenta la arquitectura del PIC y la configuración que se había elegido
para el proyecto, quedando el diagrama de la tarjeta de la siguiente forma:
Tarjeta de la primera etapa
Diagrama del circuito impreso de la primer
etapa de la interfaz
Sin embargo, existe una diferencia de voltaje, la PC y el micro controlador trabajan a 5
volts, ese mismo voltaje está presente en el puerto USB, así como en los puertos de entrada y salida
del PIC; y el FPGA trabaja con un voltaje máximo de 3.3 volts, esto nos lleva a la implementación
de una segunda etapa en el hardware de la interfaz, la de acoplamiento de voltaje en los puertos.
Para dicha etapa, se eligieron los circuitos integrados MC14504B, llamados transceiver, que
nos ofrecen la conversión de voltaje de entrada a uno diferente de salida, debidamente referenciado
en el mismo CI.
A continuación, se muestra es esquemático del hardware, tal y como queda añadiéndole esta
segunda etapa.
Diagrama final del hardware de la interfaz
En el diagrama se puede apreciar que la etapa de acoplamiento de voltaje se conforma por
dos pastillas de los mencionados circuitos, de los cuales uno recibe las primeras seis líneas de
información y el segundo las dos restantes, esto se debe a que dichos CI no tienen la capacidad de
cambio de voltaje a más líneas y no hay alguno otro de la misma familia que las tenga, existe un
dispositivo ideal para este trabajo, el 74LVC4245, desgraciadamente este tipo de dispositivos no
existen en nuestro país.
A la salida podemos encontrar que nuevamente las líneas de las
dos pastillas, pertenecientes al bus de datos, se unen en el puerto
que bien puede ser un simple conector, como puede ser un
cable que conecte directamente al FPGA.
2ª etapa, convertidores de voltaje
También se puede apreciar el conector USB tipo B hembra, el cual es casi por normalización
que se ponga como entrada a un dispositivo de este tipo. El cable que conectara al dicho dispositivo
con la computadora, HOST, también se encuentra estandarizado, cuenta con una entrada tipo A y
una tipo B ambos extremos son machos, tal y como se ilustra a continuación.
Extremos de un cable USB A-B y sus respectivos pines
Número
de Pin
1
2
3
4
Color
Función
Rojo
Blanco
Verde
Negro
V5volts
D D+
GND
Prueba del hardware y controlador
Una vez terminado el diseño del hardware y montaje del mismo en una tablilla de pruebas,
procedimos a las prueba del hardware desarrollado con el fin de encontrar errores antes de hacer las
placas del circuito impreso y de encontrar posibles errores en el software generado como
controlador.
Sistema montado en una tablilla de pruebas
Estando ya validados el circuito y controlador, se realizó la placa
del circuito impreso mencionada y procedimos a la conexión del
sistema a la PC, la cual reconoce al nuevo hardware e indica que no
existen controladores disponibles para el mismo.
Conexión a la PC para su prueba
El sistema solicita que se instale el controlador del nuevo hardware, ya sea mediante
búsqueda automática o manual. Una vez localizado el nuevo controlador, se instala en la PC.
Y de inmediato en la lista del administrador de dispositivos aparecerá el nuevo puerto de
comunicaciones, COM4.
En la imagen de la izq. podemos observar que la PC solo tiene un COM, en la imagen de la derecha aparece COM3
Una vez obtenido dicho este puerto adicional en la lista quedan probados el Hardware, hasta
la primera etapa, y el controlador mismo.
La siguiente prueba consiste en verificar que realmente se esté generando la comunicación
entre la PC y el PIC, y que este último proporcione mediante su puerto B los ocho bits de datos
enviados via USB desde la PC. Para esta etapa fue necesario el desarrollar un programa en
MATLAB, que enviara a dicho puerto una serie de pulsos, los que se visualizará, en una barra de
leds, dispuesta en paralelo a la etapa de conversión de voltaje.
Barra de leds que permitió observar la transmisión de
datos por el Puerto del PIC hacia los transceivers
El programa desarrollado es un contados simple de ocho bits, que ira de 0 a 255, con su
respectiva equivalencia en binario, una vez terminado el conteo quedará probado que las ocho vías
del bus de datos funciona correctamente. Ir al ANEXO 4 para ver el programa del contador de ocho
bits.
Finalmente, la última etapa de prueba consta de la segunda parte del hardware, la etapa de
conversión o acoplamiento de voltaje. Para probar esta parte del sistema, únicamente es necesario
alimentar el circuito con una fuente que proporcione como máximo 3.3 volts y medir el voltaje en
cada una de las vías del bus de datos que va hacia el FPGA. Es importante que dicho voltaje no
presente mucha variación y que este lo mas próximo a 3 volts, de lo contrario el FPGA podría sufrir
daños en el puerto de entrada.
Impacto
1. Ganar experiencia en el manejo de imágenes CMOS utilizando FPGA’s.
2. Dar un curso intersemestral para profesores.
3. Obtener un manual de usuarios.
4. Dar experiencia en desarrollo de proyecto a un alumno PIFI y un alumno de Servicio Social.
5. Exponer un artículo en un congreso nacional.
ANEXO 1
ANEXO 2
Programa realizado en PICBASIC PRO(TM) Compiler 2.47 para el control de flujo de datos entre
el PIC18F4550 y una PC, vía USB.
INCLUDE
"C:\PBP\18F4550.INC"
; En la sección siguiente se definen las variables para uso de memoria RAM interna
#define
RAM_START
RAM_END
RAM_BANKS
BANK0_START
BANK0_END
BANK1_START
BANK1_END
BANK2_START
BANK2_END
BANK3_START
BANK3_END
BANKA_START
BANKA_END
OSC
48
EQU
EQU
EQU
EQU
EQU
EQU
EQU
EQU
EQU
EQU
EQU
EQU
EQU
00000h
003FFh
00004h
00060h
000FFh
00100h
001FFh
00200h
002FFh
00300h
003FFh
00000h
0005Fh
; En esta sección se definen los registros para el uso de memoria y otros generales
FLAGS
EQU RAM_START + 000h
R0
EQU RAM_START + 001h
R1
EQU RAM_START + 003h
R2
EQU RAM_START + 005h
R3
EQU RAM_START + 007h
R4
EQU RAM_START + 009h
R5
EQU RAM_START + 00Bh
R6
EQU RAM_START + 00Dh
R7
EQU RAM_START + 00Fh
R8
EQU RAM_START + 011h
GOP
EQU RAM_START + 013h
RM1
EQU RAM_START + 014h
RM2
EQU RAM_START + 015h
RR1
EQU RAM_START + 016h
RR2
EQU RAM_START + 017h
RS1
EQU RAM_START + 018h
RS2
EQU RAM_START + 019h
_buffer
EQU RAM_START + 01Ah
_cnt
EQU RAM_START + 01Bh
_PORTL
EQU PORTB
_PORTH
EQU PORTC
_TRISL
EQU TRISB
_TRISH
EQU TRISC
; Inicio del programa principal
INCLUDE
"USBCDC.MAC"
; agrega la biblioteca del controlador
USB
INCLUDE
"C:\PBP\PBPUSB18.LIB"
; agrega la biblioteca del bus de salida
; Inicialización de puertos
MOVE CB 000h, TRISB
MOVE CB 000h, PORTB
MOVE CB 0FFh, TRISD
USBINIT
;rutina de entrada de datos via USB
LABEL
_idleloop
USBSERVICE
; recepción de datos
MOVE CB 001h, _cnt
USBIN CBBL 003h, _buffer, _cnt, _idleloop
; decodifica la información
MOVE BB _buffer, PORTB
; envía el Nuevo paquete de datos al
buffer
MOVE CB 000h, _buffer
; escribe en el Puerto B la info del buffer
END
ANEXO 3
Programa del controlador del dispositivo USB que simula un puerto RS-232, para una plataforma
Windows 2000 y posteriores.
; Windows USB CDC ACM Setup File
; Copyright (c) 2000 Microsoft Corporation
; Copyright (C) 2004 Microchip Technology Inc.
[Version]
Signature="$Windows NT$"
Class=Ports
ClassGuid={4D36E978-E325-11CE-BFC1-08002BE10318}
Provider=%melabs%
LayoutFile=layout.inf
DriverVer=08/17/2001,5.1.2600.0
[Manufacturer]
%MFGNAME%=DeviceList
[DestinationDirs]
DefaultDestDir=12 ; 12 means "C:\Windows\system32\drivers"
[SourceDisksFiles]
[SourceDisksNames]
[DeviceList]
%DESCRIPTION%=DriverInstall, USB\VID_04D8&PID_000A
descriptor
; Note VID, PID match device
;-----------------------------------------------------------------------------; Windows 2000/XP Sections
;-----------------------------------------------------------------------------[DriverInstall.nt]
CopyFiles=DriverCopyFiles
AddReg=DriverInstall.nt.AddReg
[DriverCopyFiles]
usbser.sys,,,0x20 ; 0x20 means "Don't overwrite a newer version"
[DriverInstall.nt.AddReg]
HKR,,DevLoader,,*ntkern
HKR,,NTMPDriver,,usbser.sys
HKR,,EnumPropPages32,,"MsPorts.dll,SerialPortPropPageProvider"
[DriverInstall.nt.Services]
AddService=usbser, 0x00000002, DriverService ;0x02 means "Mark this as driver for this device"
[DriverService]
DisplayName=%SERVICE%
ServiceType=1
StartType=3
ErrorControl=1
ServiceBinary=%12%\usbser.sys ; %12% means "C:\Windows\system32\drivers"
;-----------------------------------------------------------------------------; String Definitions
;-----------------------------------------------------------------------------[Strings]
melabs="microEngineering Labs, Inc."
MFGNAME="microEngineering Labs, Inc."
DESCRIPTION="PBPCDC Communications Port"
SERVICE="PBP RS-232 Emulation Driver"
ANEXO 4
Programa desarrollado en MATLAB del contador para la prueba del sistema hasta la primer
etapa del hardware.
%clear all; close all;clc
pto=serial('COM4');
%Crea la entidad del puerto COMx
fopen(pto);
%Abre el puerto
for cont=0:1:255
%Ciclo de escritura de 0 a 255
fprintf(pto,cont); %Escribe en el puerto el valor
% pause(.5) ;
%Retardo de medio segundo
cont=cont+1;
%Incrementa el contador
end
fclose(pto);