Automatización Integral de Edificios. Curso 2008
Anuncio

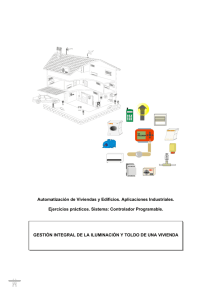
Automatización Integral de Edificios. Curso 2008-2009 PRÁCTICAS. Programación de un PLC. STEP 7-MicroWI& Objetivos: Crear el programa de control de una mini-instalación domótica con el software MicroWIN STEP 7 y comprobar su funcionamiento. Introducir los conceptos básicos de programación de autómatas necesarios para la creación de dicho programa. Automatismo eléctrico vs Autómata programable 1. Tipos de memoria. La Memoria de datos es el área de trabajo a la que accede el programa de aplicación. Memoria de datos Área de datos Objetos - Imagen del proceso de las entradas (I,E) - Temporizadores (T) - Imagen del proceso de las salidas (Q,A) - Contadores (Z,C) - Marcas internas (M) - Entradas analógicas (AI, AE) - Memoria de variables (V) - Salidas analógicas (AQ, AA) - Marcas especiales (SM) - Acumuladores (ACU) - Contadores rápidos (HC) 1 2. Ciclo de funcionamiento Un ciclo de scan consiste básicamente en cuatro pasos bien diferenciados: 1. Lectura de las entradas del PLC. 2. Ejecución del programa de control. 3. Escritura de las salidas del PLC. 4. Tareas internas del PLC. Señal binaria, estado de señal El autómata consulta el valor de las entradas según dos estados: - Estado de señal “0” ? No existe tensión. Estado de señal “1” ? Existe tensión. 2 3. Lenguajes de programación de PLCs S_01 S_02 Manual ( S_01 S_03 LD Start S_01 SF Paso_1 Transición_02 Paso_2 I Programación con lenguajes conocidos de PLC ... y lenguaje de alto nivel LD Entrada_Manual OR Entrada_Automática AND Desbloqueo ST Funcionamiento LD Entrada_01 Transición_Fin IF Data = "EOF" FOR Index:=1 TO 128 X:=Read_Data(Datenfeld[index] IF X > 2500 THEN END_IF END_FOR END_IF S S_01 XO S_02 S_03 Tiempo_0 TO Lámpar T#12s400m FB Tiempo 4. Operaciones lógicas con bits: consulta al estado 1, consulta al estado 0, detección de flancos, asignación, poner a 1, poner a 0. - Consulta al estado 1. El resultado es cierto (1) si el bit de memoria consultado es igual a 1, y es falso (0) si el bit es 0. - Consulta al estado 0. El resultado es cierto (1) si el bit de memoria consultado es igual a 0, y es falso (0) si el bit es 1. - Detectar flanco positivo. El resultado es 1 durante un ciclo, cuando se produce un cambio de 0 a 1. - Detectar flanco negativo. El resultado es 1 durante un ciclo, cuando se produce un cambio de 1 a 0. - Asignación. Cuando se ejecuta la operación Asignar, el bit se activa en la imagen del proceso. - Poner a 1 (S) y poner a 0 (R). Cuando se ejecutan estas operaciones, se activa (se pone a 1) o se desactiva (se pone a 0) el número indicado de salidas (N) a partir del valor indicado por el parámetro binario. 3 5. Temporizador de retardo a la conexión (TO&). La operación TON cuenta el tiempo al estar activada (ON) la entrada de habilitación. Si el valor actual (Txxx) es mayor o igual al valor de preselección (PT), se activa el bit de temporización (bit T). El valor actual del temporizador de retardo a la conexión se borra cuando la entrada de habilitación está desactivada (OFF). El temporizador continúa contando tras haber alcanzado el valor de preselección y para de contar cuando alcanza el valor máximo de 32767. Se dispone de temporizadores TON, TONR y TOF con tres resoluciones. La resolución viene determinada por el número del temporizador que muestra la tabla siguiente. El valor actual resulta del valor de contaje multiplicado por la base de tiempo. Por ejemplo, el valor de contaje 50 en un temporizador de 10 ms equivale a 500 ms. Temporizador TON, TOF Resolución 1 ms 10 ms 100 ms Valor máximo 32,767 s 327,67 s 3276,7 s Nº de temporizador T32, T96 T33-T36, T97-T100 T37-T63, T101-T255 4 Caso 1. Mini instalación domótica. Elementos: -Farola. -Detector de luminosidad. -Anemómetro. -Interruptor para control manual o automático del toldo. -Pulsadores para subir y bajar el toldo. Finales de carrera inferior y superior. -Bombilla. -Pulsador. - La farola debe encenderse cuando se detecte poca luz. - Toldo. Se pretende que pueda funcionar en modo manual (conmutador = 0”) y en modo automático (conmutador = “1”). En modo manual, actuando sobre el Pulsador Subir el toldo sube; actuando sobre Pulsador Bajar, el toldo baja. Cuando llega a las posiciones límite señaladas por los finales de carrera el motor debe parar. En modo automático, cuando se levanta el viento o hay poca luminosidad el toldo sube. Si la luminosidad es alta y no hay viento, el toldo baja. - La bombilla se enciende/apaga con el pulsador. También se apaga cuando lleva 10 minutos encendida. 5 6