Actuadores
Anuncio

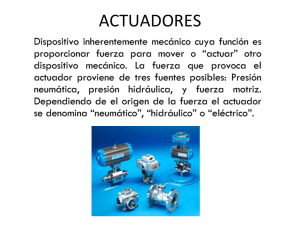
Elementos de Mecatrónica Dr. José Sebastián Gutiérrez Calderón Profesor Investigador - Ingenierías UP [email protected] Temas generales del curso • • • • • • Conceptos básicos de la mecatrónica Características principales de los transductores Sensores y sistemas de medición Actuadores y mandos Mecanismos para la automatización Control por computadora 2 Unidad 4: Actuadores y mandos (continuación…) 3 Actuadores Existen tres tipos de actuadores: Neumáticos Hidráulicos Eléctricos Actuadores Neumáticos Fuente de energía: aire a presión Pistones, motores, válvulas Hidráulicos Fuente de energía: fluido Pistones, motores, válvulas Eléctricos Fuente de energía: electricidad Motores AC, DC, paso a paso, servomotores 4 Actuadores Actuadores eléctricos Al estudiar sistemas eléctricos que se emplean como actuadores de control deberán tenerse en cuenta los siguientes dispositivos y sistemas: Dispositivos de conmutación, como interruptores mecánicos (relevadores) e interruptores de estado sólido (diodos, tiristores y transistores), en los que la señal de control enciende o apaga un dispositivo electrónico, que puede ser un calentador o un motor 5 Actuadores Actuadores eléctricos Dispositivos tipo solenoide, en los cuales una corriente que pasa por un solenoide acciona un núcleo de hierro, por ejemplo una válvula neumática/hidráulico operada por solenoide, donde la corriente de control que pasa por el solenoide se utiliza para regular el flujo neumático/hidráulico. 6 Actuadores Actuadores eléctricos Sistemas motrices, por ejemplo, motores de DC y AC, en los cuales la corriente que pasa por el motor produce una rotación. 7 Actuadores Actuadores eléctricos - Relevadores El relevador también conocido como relé o relay, es un dispositivo electromecánico. Están formados por una bobina y unos contactos los cuales pueden conmutar corriente continua o bien corriente alterna. Permite controlar circuitos de salida que posean mayor potencia que los de entrada. Al fluir corriente a través del solenoide, se produce un campo magnético que atrae la armadura metálica, mueve la varilla de empuje, cierra los contactos del interruptor normalmente abierto (NO, normally open) y abre los contactos del interruptor normalmente cerrado (NC, normally closed) 8 Actuadores Actuadores eléctricos - Relevadores 9 Actuadores Actuadores eléctricos - Relevadores Los relevadores se utilizan con frecuencia en sistemas de control. Cuando la salida del controlador es relativamente pequeña y es necesario encender o apagar un elemento final, es necesario una corriente mucho más grande, por ejemplo la corriente requerida en un motor. En tal situación es posible utilizar relevadores para realizar este control. Una desventaja presente en los relés mecánicos está en su vida útil, por el sistema mecánico presente en éstos. Además, la conmutación en un relé mecánico genera transitorios y sobre picos que pueden alterar una medida o dañar directamente la eficacia en la entrada de un sistema de adquisición como el Arduino®, PLC’s o Microcontroladores y la salida en sistemas de control. 10 Actuadores Actuadores eléctricos - Relevadores De esta forma, debido a que los relevadores son inductivos, pueden generar un contra voltaje cuando deja de fluir la corriente de energización o cuando sus interruptores de entrada van de un estado alto a uno bajo. Como resultado se puede presentar daño en el circuito de conexión. Para solucionar el problema, se debe de conecta un diodo a través del relevador, así, cuando se presente una fuerza electromotriz, el diodo protegerá el sistema. 11 Actuadores Actuadores eléctricos - Motores Los motores eléctricos con frecuencia se usan como elemento de control final en los sistemas de control por posición o de velocidad. Los motores se pueden clasificar en dos categorías principales: • Motores de DC • Motores de AC La mayoría de los motores que se emplean en los sistemas de control modernos son motores de DC. 12 Actuadores Actuadores eléctricos - Motores Los principios básicos del funcionamiento de un motor son los siguientes: Fuerza sobre un conductor eléctrico. Un conductor de longitud l lleva una corriente i en un campo magnético con densidad de flujo B perpendicular al conductor, la fuerza ejercida F es igual a Bil. I L Fuerza F B 13 Actuadores Actuadores eléctricos - Motores 𝐹 = 𝐵𝑖𝑙 ∙ 𝑠𝑒𝑛(𝛼) F=Fuerzan en newtons B= Densidad de flujo magnético.(teslas) i= Corriente eléctrica que circula por el conductor.(amperes) l= longitud del conductor Sen(a)= Seno del ángulo que forman los campos B e I. 14 Actuadores Actuadores eléctricos - Motores Cuando decimos que un campo magnético genera una corriente eléctrica en un conductor, nos referimos a que aparece una fem (llamada fem inducida) de modo que las cargas del conductor se mueven generando una corriente (corriente inducida). La ley que explica esta interacción entre la fuerza electromotriz inducida y el campo magnético es la Ley de Faraday: 𝑑𝜙𝑚 𝜀=− (𝑣𝑜𝑙𝑡𝑠) 𝑑𝑡 En donde fm es el flujo del campo magnético. Por tanto, para que aparezca una fuerza electromotriz (fem) inducida se debe variar el flujo del campo magnético a través de la superficie delimitada por el conductor. 15 Actuadores Actuadores eléctricos - Motores El signo menos de la ley de Faraday indica el sentido que va a llevar la corriente inducida y se conoce como Ley de Lenz “El sentido de la corriente inducida es tal que tiende a oponerse a la causa que lo produce.” El fenómeno de la inducción magnética constituye el principio básico de los generadores eléctricos, de ahí que cualquier motor es al mismo tiempo un generador. 16 Actuadores Actuadores eléctricos - Motores En un motor convencional, los devanados de alambre se montan en las ranuras de un cilindro de material magnético conocido como armadura. Esta armadura esta montada en cojinetes que le permite girar (rotor). Armadura Devanados 17 Actuadores Actuadores eléctricos - Motores Se monta la armadura en el campo magnético que producirán los polos de campo con los imanes permanentes o electroimanes. Estator Estator Rotor Rotor 18 Actuadores Actuadores eléctricos - Motores Los extremos del devanado de la armadura se conectan con los segmentos adyacentes de un anillo segmentado conocido como conmutador. El contacto eléctrico con los segmentos se logra mediante contactos de carbón conocidos como escobillas. Devanados Conmutador Escobillas 19 Actuadores Actuadores eléctricos - Motores Conforme la armadura gira, el conmutador invierte la corriente de cada uno de los devanados al desplazarse por los polos de campo. Esto es necesario para que las fuerzas que actúan en el devanado sigan actuando en la misma dirección y la rotación continúe. La dirección de rotación del motor de DC se invierte al invertir la corriente de armadura o la corriente de campo. Conmutador 20 Actuadores Actuadores eléctricos - Motores - Imán Hace años la empresa mastec® realizó un proyecto mecatrónico donde se implementó un contacto eléctrico con escobillas de carbón para conmutar corriente alterna y permitir el movimiento superior de un robot de 360°. 21 Actuadores Actuadores eléctricos - Motores - Imán En los motores de imán permanente los campos del estator son proporcionados mediante imanes permanentes. Imán permanente 22 Actuadores Actuadores eléctricos - Motores - Imán Los motores de imán permanente no requieren fuente de alimentación externa y por lo tanto no producen calentamiento. Un motor de imán permanente es más ligero y más pequeño que otros motores DC equivalentes debido a que la intensidad del campo del imán permanente es alta. Los motores de imán permanente son fáciles de invertir al conmutar la dirección del voltaje aplicado, pues la corriente y el campo cambian de dirección sólo en el rotor. Rotor Imán permanente 23 Actuadores Actuadores eléctricos - Motores - Imán Los motores de imán permanente pueden ser motores con escobillas, sin escobillas o de pasos. Motores de imán permanente sin escobillas Un problema con los motores DC es que requieren un colector y escobillas para invertir en forma periódica la corriente que pasa por cada uno de sus devanados de la armadura. Las escobillas establecen contacto deslizante con el colector; las chispas que saltan entre ambos van desgastando las escobillas. Por ello, las escobillas deben remplazarse de manera periódica y recubrirse el colector. Para evitar estos problemas se han diseñado motores sin escobillas. 24 Actuadores Actuadores eléctricos - Motores - Imán Motores de imán permanente sin escobillas Estos motores consisten en un rotor de imán permanente. Un conductor por el que pasa corriente eléctrica en un campo magnético experimenta una fuerza, asimismo, como consecuencia de la tercera ley de Newton, el imán también experimenta una fuerza opuesta de igual magnitud. En un motor DC convencional, el imán esta fijo y los conductores por los que pasa la corriente presentan movimiento. En cambio en el motor DC de imán permanente sin escobillas sucede lo contrario; los conductores por los que pasa la corriente están fijos y el imán se mueve 25 Actuadores Actuadores eléctricos - Motores - Imán Motores de imán permanente sin escobillas Rotor imán permanente Devanados Rotor imán permanente Devanados 26 Actuadores Actuadores eléctricos - Motores - Imán Motores de imán permanente sin escobillas La corriente que llega a los devanados del estator se conmuta en forma electrónica mediante transistores en secuencia alrededor de los devanados, la conmutación se controla con la posición del rotor, de manera que siempre haya fuerzas actuando en el imán provocando que rote en la misma dirección. Los sensores de efecto Hall por lo general se usan para detectar la posición del rotor e iniciar la conmutación de los transistores; estos sensores se colocan alrededor del estator. Estos motores se utilizan cada vez más cuando se necesita alto rendimiento aunado a una gran confiabilidad y poco mantenimiento. Gracias a que no tienen escobillas, estos motores no producen ruido y permite alcanzar altas velocidades. 27 Actuadores Actuadores eléctricos - Lineal Los actuadores son los dispositivos encargados de efectuar acciones físicas ordenadas por algún sistema de control. Se le da el nombre de actuadores eléctricos cuando se usa la energía eléctrica para que se ejecuten sus movimientos. Los actuadores eléctricos se utilizan para robots, sistemas mecatrónicos y de control de tamaño mediano, pues éstos no requieren de tanta velocidad ni potencia. Los robots, sistemas mecatrónicos y de control que usan actuadores eléctricos se caracterizan por una mayor exactitud y repetitividad. 28 Actuadores Actuadores eléctricos - Lineal Un actuador lineal eléctrico es un dispositivo que convierte el movimiento de rotación de un motor de corriente continua de bajo voltaje en movimiento lineal. Un actuador lineal eléctrico consta de un motor, un engranaje y una rosca de eje que incluye una tuerca. engranaje Rosca sin fin motor 29 Actuadores Actuadores eléctricos - Lineal 30 Proyecto de laboratorio 6 31 Proyecto de laboratorio 6 Objetivo: Crear un mecanismo seguidor solar utilizando un actuador eléctrico y un dos módulos fotovoltaicos colocado en una estructura metálica diseñada y desarrollada por el equipo. Características del sistema: • El seguidor tiene que comenzar a moverse desde la salida del sol y parar hasta la puesta del sol, su único movimiento será del este al oeste y deberá regresar a su posición original para el siguiente día. El control deberá ser automático y manual. • En el control manual se realizará el movimiento del seguidor y será representado con una interfaz gráfica en Visual Basic, mostrando el ángulo de inclinación actual y su posición. • Debe enviar la posición en la que se encuentra el ángulo para ser vista en una página de internet. – Ver archivo Subir_Valor_.BAT en página roboticaup.org – • Se deberá de registrar la corriente del panel solar y la hora en todo el día. – Ver documentación artículo SENIE 2016 – 32 Proyecto de laboratorio 6 Entrega del proyecto: • Tiempo de 1 hora y 30 minutos para entregar el proyecto. • Jueves 13/10 se presentará el primer avance ante todo el salón. Se mostrará una idea general del proyecto, el FTP funcionando y parte de Interfaz gráfica de Visual Basic. • Lunes 17/10 se presentará el segundo avance ante todo el salón. Se mostrará la estructura metálica, el montaje de los sensores y parte de Interfaz gráfica de Visual Basic. • Jueves 20/10 se realizará la sexta entrega. • Documentación en formato de artículo IEEE a doble columna, entregarla antes de comenzar la siguiente clase. • Documentación sin haber aprobado la entrega, no se acepta. 33