1 analisis de circuitos e intrumentación e-learning jimmy raúl
Anuncio

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
ANALISIS DE CIRCUITOS E INTRUMENTACIÓN E-LEARNING
JIMMY RAÚL ROCHA VALBUENA
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA ESCUELA DE CIENCIAS
BÁSICAS TECNOLOGIA E INGENIERIA PROGRAMA DE TECNOLOGIA EN AUDIO
2009
1
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
INTRODUCCIÓN
El
curso
de
análisis
de
circuitos
hace
parte
del
Campo
de
Formación
Profesional específica para el programa de Tecnología en Audio, cuenta con cuatro
créditos académicos, es Metodológico y a distancia. Pretende brindarle al estudiante
los principios básicos para el análisis y diseño de circuitos eléctricos de corriente
continua y alterna, se incluyen además los fundamentos de la instrumentación
industrial.
En el mundo de hoy las aplicaciones de la electrónica se basan en el uso de los
principios fundamentales
de los circuitos eléctricos. Los productos electrónicos
que usamos día a día fueron construidos empleando los circuitos eléctricos como parte
del diseño.
Los
principios
de
los
circuitos
eléctricos
electrónicos industriales, generación
son
empleados
en
productos
y distribución de potencia, hardware de
computadores, automatización, robótica, control y sistemas de comunicación.
El curso consta de cuatro unidades. La primera unidad es una introducción al análisis
circuital, se incluyen las leyes y variables en los circuitos, las propiedades de
los circuitos resistivos y las aplicaciones de los circuitos resistivos. La segunda
unidad incluye el análisis de circuitos AC, se estudiarán los métodos de análisis de
circuitos, los elementos de almacenamiento de energía y los circuitos de corriente
alterna. La unidad tres comprende el análisis de circuitos de potencia, los circuitos de
tres fases y potencia en AC, transformadores e inductancia mutua y los transitorios.
La
cuarta
unidad
incluye
los
principios
básicos
de
instrumentación,
los
diferentes puentes de medición, la digitalización de señales, y los sistemas de
instrumentación de visualización dinámica.
2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Para que se desarrolle un proceso de aprendizaje autónomo del curso se
contarán con trabajos colaborativos, que permitan que el estudiante desarrolle el
componente práctico mediante el empleo de simulaciones y montajes básicos de
circuitos.
El estudiante desarrollará un proceso de aprendizaje de los contenidos del curso,
desarrollando actividades de trabajo
personal y trabajos en pequeños grupos de
trabajo colaborativo de aprendizaje; además del acompañamiento tutorial respectivo,
de manera que se fortalezca su aprendizaje autónomo.
El sistema
de evaluación
del curso,
se fundamenta
en los lineamientos
del
Reglamento General Estudiantil, teniendo como objetivo, el comprobar el nivel de
avance del aprendizaje autónomo obtenido a través del curso. Se usarán entonces tres
tipos de evaluación.
Autoevaluación: Evaluación que realiza el estudiante para valorar su propio proceso
de aprendizaje.
Coevaluación: Se realiza a través de los grupos colaborativos,
y pretende la
socialización de los resultados del trabajo personal.
Heteroevaluación: Es la valoración que realiza el tutor.
Dentro del desarrollo del curso se tendrán como herramientas fundamentales en el
proceso pedagógico de aprendizaje los recursos tecnológicos
que posibiliten la
relación estudiante – tutor.
•
Guías y módulos del curso como herramienta
contenidos temáticos y orientaciones pedagógicas.
•
Plataformas
y programas institucionales
asincrónica
entre
estudiante
y
tutor
videoconferencia, etc.
•
El computador como herramienta informática para poder acceder a los
programas institucionales, plataformas, software para simulaciones y demás
herramientas disponibles en la Web.
3
para
el
suministro
de
que permitan la comunicación
como
son
el
Chat,
la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
•
Herramientas disponibles en Internet, tales como foros, grupos de interés,
software para simulación, manuales técnicos, etc.
Para un adecuado desarrollo de los contenidos del curso es necesaria la consulta
de diferentes materiales bibliográficos, empleando además herramientas como la
biblioteca virtual, material en Internet, manuales técnicos, etc. La consulta de diferentes
fuentes documentales y bibliográficas permite el fortalecimiento del espíritu investigativo
del estudiante y sus capacidades para interpretar y resolver diferentes problemas de su
campo de formación.
4
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
UNIDAD 1: INTRODUCCIÓN AL ANALISIS CIRCUITAL CAPITULO 1:
LEYES Y VARIABLES EN LOS CIRCUITOS LECCIÓN 1: CORRIENTE, VOLTAJE,
POTENCIA
OBJETIVOS
1. Comprender las definiciones de corriente, voltaje, y potencia eléctrica.
2. Expresar los valores de una cantidad eléctrica con un prefijo de magnitud
adecuado.
CARGA Y CORRIENTE
La carga eléctrica q tiene dos características principales:
1. La cantidad de carga, su unidad es el Culombio (C) en el SI (Sistema
Internacional de Unidades).
2. La polaridad de carga, la cual es positiva o negativa. Por ejemplo la carga de un
electrón es :
-19
q = -1.60 x 10
C
El protón cuenta con la misma cantidad de carga pero con polaridad positiva.
Es importante recordar que cargas con polaridad opuesta se atraen y tienden a
neutralizarse, mientras que las cargas de igual polaridad se repelen.
10
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
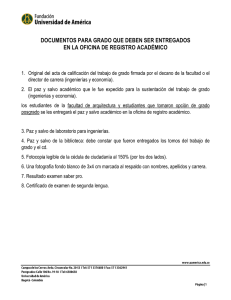
La corriente eléctrica existe en cualquier lugar donde exista un flujo de carga.
Tomemos por ejemplo la figura 1 donde una carga positiva q1 = 8C y
negativa q2 =
la derecha
una carga
-2C viajan a la derecha, mientras otra carga positiva q3 = 4C, viaja a
(esta situación
se asemeja
a la que ocurre en un dispositivo
semiconductor). La carga transferida de la derecha a la izquierda es dada por:
∆q = q1 + q2 – q3 = 8 + (-2) – 4 = 2 C
Figura 1 Movimiento de cargas eléctricas
Si la transferencia de carga ∆q tiene lugar en un tiempo ∆t, entonces el valor del
flujo de corriente es ∆q/∆t. La flecha arriba de la figura indica la dirección del flujo
cuando ∆q es positivo.
El estudio de los conductores y de los dispositivos electrónicos requiere un
conocimiento detallado del movimiento interno de carga. Para propósitos de análisis
de circuitos, nosotros solo necesitamos conocer la cantidad y dirección de la corriente
resultante a través del alambre conductor o del elemento. Específicamente la corriente
instantánea es definida como:
i = dq/dt
11
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
En el SI
de unidades la corriente está dada en Amperios (A). El equivalente
es:
1A=1C/s
Es decir, un amperio de corriente resulta de la transferencia de carga a un ritmo de un
Culombio por segundo.
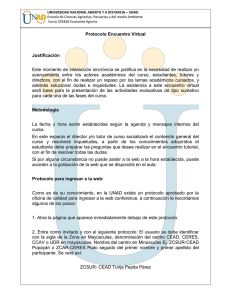
La especificación completa de la corriente en un punto de un circuito incluye
tanto dirección como valor. La dirección de una corriente positiva i es la dirección
equivalente de transferencia de carga positiva.
La dirección de la flecha en la figura 2a quiere decir que la carga equivalente
positiva va desde la izquierda a la derecha pasando por el
punto X con este valor de i amperios.
Figura 2 Dirección de la corriente
Frecuentemente,
nosotros debemos asumir una dirección de referencia i para
calcular este valor. Si el valor resulta ser una cantidad negativa, entonces nosotros
deducimos que la corriente positiva i actualmente va en oposición a la dirección de
referencia. La figura 2 b ilustra este punto.
12
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Suponga por ejemplo, que usted ha tomado la dirección de referencia mostrada en la
figura 2a pero el análisis realizado revela que i =-3a.
Este resultado negativo es perfectamente aceptable con la dirección de referencia
asumida. Sin embargo, usted podría invertir la flecha, como en la figura 2b. Si usted
escribe –i=3A. En este caso, el valor de la corriente y la
dirección
de
referencia
deben siempre aparecer juntos y ser consistentes, así el signo del valor debe ser
cambiado si la dirección de la flecha es invertida.
Todos los elementos de los circuitos que se consideren que tengan la propiedad
de carga neutra, son considerados
elementos
que no pueden acumular carga
dentro de él. De igual manera, cuando la corriente i entra por el extremo superior del
elemento de dos terminales, una corriente igual debería salir de la terminal inferior.
Hemos estado hablando aquí de una corriente instantánea, implicando que el valor de i
puede variar en el tiempo t. La dependencia en el tiempo es especificada, en la notación
funcional:
i(t)=dq(t)/dt
Tengamos
en cuenta
que
las
letras
en minúsculas
representan
valores
instantáneos de cantidades que pueden variar con el tiempo.
Las letras mayúsculas son reservadas para cantidades que son constantes en el
tiempo.
Ahora supongamos
que necesitamos
determinar
la carga total qT, transferida
en algún intervalo de tiempo de duración T segundo es decir desde t = t0 a t = t0 + T.
Si la corriente pasa a ser constante, entonces i = I amperios a través del intervalo,
entonces
I = qT /T, esto es qT = IT
13
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
ENERGIA Y VOLTAJE
La corriente a través de una bobina produce calor y luz porque el movimiento de
carga aumenta la energía en la bombilla. Cada carga
por lo tanto conlleva a un
cambio en el potencial de energía, y así existe una diferencia
de
potencial
a
través del elemento. La variable eléctrica asociada con la diferencia de potencial
es voltaje. Específicamente si la carga dq, provoca un aumento de energía dw desde
un punto X a un punto Y, entonces el voltaje a través de estos puntos es definido por
V = dw/dq
Con la energía expresada en Joule (J), las entidades correspondientes son:
1V = 1J/C
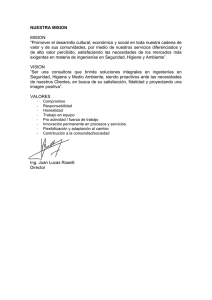
La figura 3a muestra como se emplea la polaridad del voltaje, con un signo (+) a el
mayor
potencial
y un signo (-) al menor
potencial.
Similar
a la dirección de
corriente, las marcas de referencia de voltaje deben ser acompañadas de un valor de
voltaje v. Si el valor calculado es una cantidad negativa, entonces, usted puede
invertir las marcas de la polaridad, y cambiar el signo del valor. Cuando el elemento
bajo consideración absorbe energía, la carga positiva equivalente va desde un mayor a
un menor potencial. Los elementos que absorben energía son llamados elementos
pasivos, en la figura 3a se ilustra la convención de un elemento pasivo, en el cual:
Figura 3. Convenciones de polaridad para elemento pasivos y activos
14
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La referencia de la corriente a través de un elemento pasivo, es en la dirección de
mayor a menor potencial.
Los elementos activos, son aquellos que tienen la capacidad para suministrar
energía. En estos la corriente de referencia es en la dirección de menor a
mayor potencial.
Tenemos allí un aumento de voltaje a través del elemento.
La figura 4 muestra la manera de realizar la medición de voltaje con un voltímetro (VM) y
de corriente con un Amperímetro (A). El amperímetro es insertado al final del elemento y
registra corriente i a través del medidor y el elemento. Pero el voltímetro de prueba
debe tocar las terminales del elemento para medir el voltaje.
Figura 4. Medición de corriente y voltaje
POTENCIA ELECTRICA
La
potencia es el valor de trabajo realizado o el valor de energía transferida,
es definida en general por:
P = dw/dt
En el SI sus unidades con los Vatios (W). La potencia eléctrica consumida o
suministrada por un elemento del circuito es definida como:
P = vi
o
15
1W=1V*A
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Cuando las referencia de polaridad son
dibujadas de acuerdo a la convención de
un elemento pasivo, el producto vi es igual a la potencia consumida por el elemento.
Cuando las referencias de polaridad son dibujadas de acuerdo con la convención de un
elemento activo, vi es igual a una potencia suministrada por el elemento. Muchos de los
dispositivos electrónicos son caracterizados por sus valores de potencia, por ejemplo
un bombillo de 100 W. Cuando la potencia permanece constante a P Vatios, la
energía total Wt entregada en un intervalo de tiempo de T segundos es:
Wt = PT
Algunas compañías generalmente miden la energía en términos de kilowatios –
por hora (kw/h), el cual indica la energía suministrada cuando P = 1000W y T = 1 hora
= 3600 segundos; por tanto
1kwh = 1000W X 3600 s = 3.6 x 106 J
El kilovatio – hora no es un estándar del SI
Ejemplo: Capacidad de una batería
Una batería de un automóvil típico almacena cerca de 5x106 J de energía, algo así
como 1kwh. Nosotros podemos calcular la carga trasferida cuando una farola de luz es
conectada a la batería y consume 4 A de corriente.
Cuando v = 12 V y i = 4 A, la potencia instantánea consumida por la farola puede ser:
p = 12V x 4A = 48W
Si el voltaje y corriente permanecen constantes, entonces la energía suministrada en un
minuto de operación es:
w T = 48 W x 60 s = 2880 J
Ya que v = dw/dq, entonces la carga total que pasa a través de la farola durante este
intervalo es:
qT = 4A x 60 seg = 240 C
16
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La máxima carga almacenada de la batería de un automóvil es frecuentemente
denominada como amperio – hora (Ah), donde:
1Ah = 1C/s x 3600s = 3600 C
Para el manual de la batería, la capacidad es:
qalmacenada = w almacenada / v = 5 x 105J/12 V = 4.17 x 105 C = 116Ah
Por tanto la batería puede “morir” después de suministrar 1 A por 116 horas o 4
amperios por 114/4 = 29 horas.
17
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 2: FUENTES Y CARGAS
Un circuito eléctrico completo generalmente incluye como mínimo una fuente que
produce potencia y un elemento de carga que consume potencia. Así un circuito
simple consiste en una fuente y una carga, más un alambre que interconecta los
elementos, como se representa en la figura 5. La corriente positiva i pasa a través de la
carga de X a Y, y el potencial en el punto X es v voltios mayor que el potencial en el
puerto Y. La carga consume una potencia p = vi; esta potencia proviene de la fuente de
alimentación.
Figura 5 Fuente y carga de un circuito.
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 11
Fuente: Cicuits. Engineering Concepts and Analysis of Linear Electric
Circuits Carlson A Bruce 2000. Brooks / Cole Thomson Learning
18
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Curvas de i-v
Muchos de los elementos de dos terminales pueden ser descritos completamente
mediante la relación existente entre el voltaje
y corriente instantáneo. Esta relación
puede ser expresada mediante una ecuación o dibujada mediante una grafica de
corriente versus voltaje llamada curva i-v. Tales curvas pueden ser
obtenidas
experimentalmente con la ayuda de una fuente ajustable y un arreglo de medidores
como los mostrados en la figura 4. La curva de i-v provee información valiosa acerca
de la naturaleza y el comportamiento de los elementos.
Figura 6 Curvas de corriente voltaje (i-v) para la farola de un automóvil.
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 12
Como ejemplo, la figura 6 muestra la farola de un automóvil y sus curvas de i-v. En
cualquier punto a través de la curva se puede observar que i y v tienen el mismo signo
(ambos positivos o ambos negativos) se tendrá entonces un voltaje a través de la
farola cuando i≠0. Por tanto la farola es un dispositivo pasivo que consume potencia
cuando i≠0 y no produce potencia. Podemos intuitivamente conocer esto, sin embargo,
la curva de i- v confirman esta intuición.
19
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La curva también revela una característica casi lineal cerca al origen, con una
pendiente de ∆i/∆v = 3A/6V = 0.5A/V. De acuerdo con esto, podemos tenemos entonces
la siguiente aproximación.
i ≈ 0.5v
-6V < v < 6V
Para valores mayores de voltaje, nosotros necesitamos tomar porciones no lineales de
la curva.
Fuentes ideales
Las baterías son fuentes familiares de potencia eléctrica. Son usualmente clasificadas
como fuente de voltaje. El voltaje puede ser constante o variante en el tiempo.
Formalizando este concepto, se puede decir que:
Una fuente de voltaje ideal es un elemento de dos terminales que suministra
un voltaje constante en el tiempo a pesar de la corriente que pase a través de
ella.
Las fuentes de voltaje son llamadas algunas veces fuerza electromotriz (FEM)
para recordar
el concepto
de que esta provee
la “fuerza”
que conduce la
corriente.
La figura 7.a muestra un símbolo que es empleado para una fuente ideal de voltaje
con un variación en el tiempo vs(t). La forma de onda que se observa representa el
voltaje v = vs (t) que puede ser observado a través de las terminales.
El signo positivo sobre el símbolo de una fuente de voltaje identifica la terminal
que tiene un potencial mayor. La corriente de referencia ha sido dibujada
en
concordancia con la convención activa, asumiendo que la fuente produce potencia
y provee un aumento de voltaje.
20
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 7. Fuentes
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 12
La figura 7.b muestra el símbolo y forma de onda para una caso importante de una
fuente de voltaje sinusoidal con vs (t) = Vmcoswt. La forma de onda de voltaje
sinusoidal continuamente sube y baja entre los valores pico de +Vm y -Vm. Durante
este intervalo de tiempo cuando vs (t) es negativo, la terminal marcada como + actúa
como una terminal con menor potencial que la otra terminal. Esta fuente usualmente
suple una corriente senoidal o alterna conocida como ac. Por lo tanto, una fuente de
voltaje es frecuentemente llamada fuente de voltaje ac.
22
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Una batería ideal simbolizada como se muestra en la figura 7.c es una fuente de
voltaje
constante
con
respecto
al
tiempo.
Una
batería normalmente entrega
corriente constante i = I cuyo valor depende de ambos tanto de Vs como del
circuito al que se encuentra conectado. La corriente I es una corriente no alterna o
corriente directa (dc), nosotros llamamos a la batería una fuente de voltaje dc.
De manera similar la mayoría de los generadores eléctricos funcionan esencialmente
como fuentes de voltaje, los transistores y otros dispositivos funcionan
de manera
similar a una fuente de corriente. Esto significa que ellos tienden a mantener una cierta
corriente en lugar de un cierto voltaje. Formalmente se puede decir que:
Una fuente ideal de corriente es un elemento de dos terminales cuya corriente
tiene un valor específico constante en función del tiempo, a pesar del voltaje que
se tenga.
La figura 8 representa una fuente ideal de corriente que suministra una corriente i
= is. La referencia de la polaridad cumple con la convención activa.
Figura 8 Fuente ideal de corriente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 14
23
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La diferencia entre una fuente ideal de voltaje y una fuente de corriente es ilustrada en
sus curvas de voltaje contra corriente que se muestran en la figura 9. El voltaje a través
de una fuente ideal de voltaje en un tiempo particular es vs, es independiente de i.
De esta manera, las curvas de voltaje contra corriente debe ser una línea vertical
a v = vs. Esta línea vertical corre desde i = -∞ hasta i = + ∞, y el valor particular de i
depende de que esté conectado a la fuente de voltaje. A la inversa, la curva de
corriente versus voltaje para una fuente ideal de corriente es una línea horizontal a
i = is, y los valores de v dependen de que esté conectado la fuente de voltaje. La
polaridad de referencia de ambas curvas asume un aumento de voltaje a través de la
fuente en cuestión, así cualquiera de las fuentes producen potencia cuando ambas i o v
tienen el mismo signo.
Figura 9 Características de voltaje y corriente en las fuentes ideales
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 14
Ejemplo: Curvas de i – v para una fuente y una carga
Suponga que una batería ideal de 12 V es conectada a una lámpara de un automóvil Se
encontró que la corriente resultante y la potencia graficada se muestra en la figura 10,
donde las curvas de i – v para la batería y la farola están siendo dibujadas con el mismo
par de ejes.
24
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La intersección de las dos curvas es el único punto que simultáneamente satisface las
propiedades de ambas fuente y carga. Así, aunque la batería ideal podría suplir
cualquier valor de corriente, nosotros vemos que este circuito
particular
opera
solamente con i = 5A. La batería por tanto suministra una potencia de p = 12 V x
5 A = 60 W, la cual es consumida por la lámpara.
Figura 10 Curvas de corriente – voltaje (i-v) para una batería y una farola
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 15
Dispositivos y modelos
Teóricamente, una fuente ideal de voltaje o de corriente produce una ilimitada
cantidad de potencia. Es innecesario decir, que tal comportamiento es físicamente
imposible, así las fuentes ideales no existen. Porque entonces, nosotros definimos
estos términos. La respuesta a esta pregunta es significante, porque esto se refiere
a una importante técnica en Ingeniería Eléctrica, llamada el uso de representaciones
simplificadas o modelos de los dispositivos reales.
25
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Los modelos de los fenómenos naturales – expresados en relaciones matemáticas,
curvas, etc.- son representaciones ideales de las características
más relevantes
físicas que son
para una aplicación particular. Un buen modelo le permite a usted
predecir con razonable precisión
como
el
dispositivo
puede
comportarse
bajo
condiciones esperadas de operación.
En general los modelos ayudan a concentrarse en los factores significantes y los
efectos más importantes en la descripción de un dispositivo. Por lo tanto se debe
tener en cuenta lo que se está asumiendo y las limitaciones del modelo porque las
predicciones que van mas allá del alcance pueden ser erróneas. Considere por
ejemplo, la conclusión
inválida de que una batería puede producir una potencia
ilimitada.
La mayoría de las ramas de la ingeniería y la ciencia involucran modelos matemáticos
(Como un ejemplo, las leyes de Newton de movimiento son modelos que se aplican
solamente cuando la velocidad es pequeña comparada con la velocidad de la luz). La
ingeniería eléctrica no incluye más modelos que otros campos. Todos los símbolos de
los elementos y los diagramas de los circuitos son un modelo.
26
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 3: LEY DE OHM Y RESISTORES
El flujo de carga en un circuito eléctrico usualmente se encuentra con alguna
resistencia, resultando en una caída de tensión y la conversión de energía eléctrica en
calor.
La resistencia puede ser deseada en un circuito para producir una caída de voltaje o
una conversión de energía, o esto puede ser una no deseable pero inevitable parte
de un dispositivo o un alambre conectado. Las propiedades de la resistencia eléctrica
y los resistores son examinados aquí.
Resistores y Resistencia
Un resistor lineal ideal es un elemento de consumo de energía descrito según la
Ley de Ohm, nombrada así en honor a Georg Simon Ohm (1797 –1854). Esta ley
establece que el voltaje y corriente son directamente proporcionales el uno al otro.
Se describe por:
v = Ri
La constante de proporcionalidad R es la resistencia, medida en ohmios
(Ω).
Reescribiendo la ley de Ohm como R = v/i tenemos las unidades de la ecuación:
1 Ω = 1V/A
Así, la resistencia es igual al resultado de dividir voltaje entre corriente. Los valores
de resistencia típicos en los circuitos se encuentran en el rango de los kilohms (kΩ) a
megaohms (MΩ).
27
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 11 Resistor ideal
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 17
La figura 11 muestra el símbolo para la resistencia y la curva de corriente vs voltaje
para un resistor ideal. La convención de referencia pasiva es usada aquí porque un
resistor es un elemento pasivo. La pendiente de la
curva de i-v es igual a 1/R, por tanto:
I = v/R =
R
1
v
Se observa que al incrementarse el valor de i se aumenta el valor de v. Esto quiere
decir que el voltaje y la corriente son proporcionales uno a otro, un resistor en un
diagrama de circuitos puede ser etiquetada en términos de solamente una variable.
Así
por ejemplo la figura 12a
muestra un resistor etiquetado con un voltaje y una
corriente v/R, mientras que la figura 12b muestra un resistor etiquetado con la corriente
i y el voltaje R. Estas etiquetas facilitan el análisis de circuitos para emplear de manera
directa la ley de Ohm. Sin embargo, si una de las referencias de voltaje es invertida
entonces la ley de Ohm debe ser escrita con un signo negativo como se muestra como
en la figura 12 c, donde el voltaje es v = R (-i) = -Ri porque la corriente que va en la
dirección asumida de la caída del voltaje es –i en lugar de i.
32
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 12 Resistores marcados para la ley de Ohm.
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 17
Para un uso ocasional, es conveniente definir la conductancia G como el inverso de la
resistencia, esto es:
G = 1/R
En reconocimiento de los hermanos Werner y William Siemens, en el Sistema
Internacional de Unidades SI, la unidad para la conductancia son los siemens (S).
No obstante usted puede encontrar como unidad el termino mho. Usando la
conductancia el lugar de la resistencia, la ley de Ohm se convierte en:
i = Gv
Un interruptor
ideal puede ser modelado en términos de la resistencia
y
conductancia, pero con los valores extremos. Específicamente, en el caso de la
posición de cerrado (ON), como se muestra en la figura 14a, el interruptor
crea
una resistencia cero (R=0) tal que v = 0 x i = 0 para cualquier i. Esta condición es
conocida como corto circuito. En el circuito abierto o posición OFF mostrado en la figura
14b, el camino a través del interruptor tiene conductancia cero (G=0), así que i = 0
x v = 0 para cualquier v. Esta condición se conoce como circuito abierto.
33
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 14 Interruptor ideal ON – OFF
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 18
Disipación de potencia
Combinando la ley de Ohm con la expresión p = vi obtenemos dos expresiones
equivalentes para la potencia consumida por un resistor, las expresiones son:
p = (Ri) i = Ri
2
p = v (v/R) = v2/R
Ambas expresiones pueden ser usadas, dependiendo de si se conozca la corriente a
través del resistor o el voltaje que cae.
En un proceso conocido como calentamiento
óhmico, la potencia consumida
por un resistor es disipada en forma de calor. Un alambre resistivo enrollado es
usado precisamente para este propósito en tostadoras y otras aplicaciones. En el
caso de una lámpara incandescente, el filamento se ilumina cuando se calienta y la
corriente produce luz. El calentamiento óhmico también es la base del funcionamiento
de un fusible: Cuando la corriente pasa el límite del elemento, el calor derrite el fusible
y el circuito se rompe.
34
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El calentamiento óhmico excesivo puede causar serios daños al conectar alambres y
dispositivos
electrónicos.
Por esta razón, los ventiladores
de refrigeración son
incluidos en computadores y otros sistemas electrónicos.
Ejemplo: Cálculos con unidades consistentes
La figura 15 muestra un circuito y sus curvas de corriente – voltaje para una fuente
de corriente de 4 mA conectada a una resistencia de 5KΩ. Nosotros podemos
encontrar el voltaje resultante a través de la resistencia y la potencia disipada por este.
Figura 15 Circuito y sus
curvas de i – v para una fuente de corriente conectada
a un resistor
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 19
De acuerdo a la ley de Ohm, las curvas de corriente voltaje se interceptan en:
v = Ri = 5KΩ x 4 mA = 5*103 x 4*10-3 = 20 V
Tenemos entonces tres caminos para calcular la potencia:
p = vi = 20 V x 4 mA
p = Ri2 = 5KΩ x (4mA)2
p = v2/R = (20V)2 / 5KΩ
35
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Lo cual no lleva a p = 80 mW = 0.08W
Se puede decir que voltios, miliamperios, kilohms, y miliamperios son un grupo de
unidades consistentes.
Ahora supongamos que la resistencia se incrementa a 5 MΩ, así que v = 5 MΩ x 4 mA
= 20 kV y p = 20 kV x 4 mA = 80 W. Sobre el limite cuando R → ∞, el voltaje y la
potencia se vuelven infinitos, teóricamente, porque estamos asumiendo una fuente
de corriente ideal.
Resistividad
Como hemos dicho, la ley de Ohm describe las características externas de un
elemento resistivo. Pero la resistencia depende del material y de la forma del
elemento.
Figura 16. Fuente de voltaje conectada a una pieza uniforme
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 20
La figura 16 representa una fuente de voltaje conectada a través de una pieza
uniforme de material que tiene una longitud l y una sección – transversal de área
A. El voltaje v establece un campo eléctrico (ξ) dentro del material dirigido desde el
mayor al menor potencial y con valor:
ξ = v/l
36
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Este campo eléctrico ejerce una fuerza sobre las partículas de carga, y el flujo de
carga resultante constituye una corriente en la dirección del campo dada por:
i=Aξ/ρ
La constante ρ (rho) es una propiedad eléctrica de los materiales llamada resistividad,
medida
en ohmios
– metros
(Ω * m). El inverso
de la resistividad es la
conductividad denotada por σ = 1/ ρ
De acuerdo a las expresiones descritas:
i=
Donde
:
A(v / l )
v
=
ρ ( ρl / A)
=
R
v
R = ρl/A
La ecuación anterior muestra que la resistencia de un elemento es proporcional a la
resitividad y a la longitud, pero inversamente proporcional al area. Por lo tanto, el
alambre empleado para hacer una
resistencia de valor alto debe tener una
resistividad alta o una pequeña area. Pero los alambres destinados a llevar grandes
corrientes deben tener una baja resistividad
y
area
considerable
buscando
minimizar el calentamiento óhmico p = Ri2.
Gracias a los grandes rangos de los valores de resistivadad, la electricidad es un
medio conveniente para transportar energía.
La resistividad de un conductor generalmente se incrementa con la temperatura, por
otro lado la resistividad de un aislante diminuye con la temperatura. En algunos
casos debemos diseñar circuitos para operar en condiciones
temperatura.
Pero
la
dependencia
de
la temperatura
también
extremas
presta
de
en
si
mismo aplicaciones practicas en dispositivos tales como en termómetros.
Comercialmente
los resistores
manufacturados
son diseñados
para ser
esencialmente lineales en su rango de operación. Tales resistores son usualmente
hechos de carbón, películas metalicas, o alambre, y estos tienen una variedad de
37
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
valores estándar, rangos de tolerancia, y potencias toleradas. Las resistencias
ajustables son llamadas potenciómetros.
También
existen
los
llamados
superconductores,
estos
materiales especiales
poseen la propiedad única de resistividad cero, y por lo tanto estos eliminan las
perdidas de potencia asociada con el calentamiento óhmico. Los metales se convierten
superconductores solo a temperaturas cercanas al cero absoluto, pero algunos
compuestos cerámicos muestran comportamiento superconductor a temperaturas más
razonables para aplicaciones prácticas.
38
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 4: LEYES DE KIRCHHOFF’S
El principal objetivo en el análisis de circuitos es el determinar los valores particulares
de voltajes y corrientes. Para este propósito nosotros lógicamente necesitamos
las relaciones de corriente
- voltaje de los elementos individuales. Adicionalmente,
nosotros necesitamos las dos leyes formuladas en 1847 por Gustav Kirchhoff.
Las leyes de Kirchhoff son relaciones que expresan la interconexión de los elementos,
independientemente del tipo de elementos involucrados
Ley de Kirchhoff de corriente
Inicialmente definimos un nodo como cualquier punto de conexión de dos o más
elementos de un circuito.
Simplemente la carga debe conservarse y no puede ser acumulada en un nodo, la
cantidad de carga que fluye hacia afuera de un nodo es igual a la cantidad de carga que
fluye hacia adentro del mismo en cualquier instante. En otras palabras, un nodo
eléctrico actua como una unión de una tubería de agua donde la cantidad de agua que
sale es igual a la cantidad de agua que entra.
La ley de Kirchhoff de corriente (KCL), expresa la conservación de carga en términos
de la corriente que sale y entra a un nodo. Específicamente:
La suma de las corrientes que salen de un nodo es igual a la suma de las
corrientes que entran en este nodo.
39
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 17 Fragmento de un circuito
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 24
Como ejemplo la figura 17 muestra el
fragmento de un circuito con un nodo
indicado por un punto. Las corrientes i1 e i2 entran en el nodo mientras que la
corriente i3 sale de este, entonces:
i3 = i1 + i2
Una versión alternativa de la KCL es obtenida al mostrar las corrientes que salen de un
nodo como corrientes negativas entrando en el nodo. Entonces se puede decir que:
La suma algebraica de todas las corrientes que entran a un nodo es igual a cero.
La suma algebraica es escrita de manera simbólica como:
Σi=0
Si aplicamos esta expresión en el ejemplo anterior tenemos:
i1 + i2 + (-i3) = 0
Si se conoce el valor de i1 e i3 en el ejemplo tomado entonces se puede determinar
el valor de i2, entonces al aplicar KCL tenemos que i2 = i3 – i1.
40
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 18 Conexión serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 24
Una sencilla pero significativa aplicación de la KCL es obtenida al observar la figura
18, la cual muestra una conexión llamada serial. En general:
Dos o más elementos están en serie cuando cada nodo
conecta justamente
dos elementos.
La aplicación de la KCL en la figura 18 muestra que i2 = i1 en el nodo X y i3
= i2 en el nodo Y, por tanto:
i3 = i2 = i1
Lo que nos lleva a decir que los elementos que se encuentran en serie conducen
la misma corriente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 25
Figura 19 Fragmento de un circuito con un supernodo
41
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Al observar la figura 19 cuya configuración es más compleja. Las marcas encierran una
parte del circuito que se conoce como supernodo, donde:
Un supernodo es cualquier región cerrada que contiene dos o mas nodos y cuyos
limites intersectan algunos alambres conductores,
Cada alambre será intersectado
solamente una vez.
La carga no se puede acumular en un supernodo por lo tanto, la KCL requiere
que:
La suma algebraica de todas las corrientes que entran a un supernodo
deben ser igual a cero.
Para el supernodo de la figura, se tiene que:
i1 + i2 – i3 – i4 = 0
Este resultado se puede comprobar fácilmente revisando que para el nodo
A: i1 + i2 – ix = 0; para el nodo B: ix = i3 + i4.
El supernodo elimina el esfuerzo de encontrar una corriente que no se necesita, tal
como ix para el ejemplo.
LEY DE VOLTAJE DE KIRCHHOFF’S
Todo los circuitos eléctricos cuentan como minimo con un lazo, definimos como lazo
cualquier camino que va desde un nodo a otro nodo y retorna a el nodo de inicio,
pasando solamente una vez por cada nodo.
Se debe cumplir que la energía se conserva cuando una carga viaja a través de
un lazo, la energía abandonada en la carga es igual a la energia ganada por este.
La ley de voltajes de Kirchhoff’s (KVL) expresa la conservación de energía en términos
de aumentos y disminuciones de voltajes alrededor de un lazo. Espeficamente:
La suma de las caídas de voltaje alrededor de cualquier lazo es igual a la suma de
los aumentos de voltaje.
42
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 20. Circuito marcado con una rama
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 26
En este contexto una caída de voltaje significa que el potencial disminuye. Para poner
un ejemplo consideremos el lazo ABEA marcado por la curva en la figura 20. Si una
carga positiva viaja en el sentido de las manecillas del reloj como se indica, entonces
v1 y v2 son caídas de voltaje mientras que vx es un aumento de voltaje, tenemos
entonces que:
v1 + v2 = vx
De manera similar a ley de corrientes, la ley de voltajes puede ser expresada
en
términos
de
una
suma
algebraica
considerando
los aumentos de voltaje
como caídas de voltaje negativas,
Entonces decimos que la suma algebraica de todas las caídas de voltaje en
cualquier lazo del circuito es igual a cero.
43
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
De manera simbolica, esta expresión es:
Σv=0
La suma algebraica para el lazo ABEA en la figura 20 es:
v1 + v2 + (-vx) = 0
Por el mismo método, haciendo un recorrido en el sentido de las manecillas
de un reloj por el lazo exterior tenemos que v1 + v3 – v4 – v5 – vx
= 0. Haciendo el recorrido en el sentido opuesto a las manecillas de un
reloj, se cambian todos los signos. Podemos encontrar el valor de vx al depejarlo
de vx = v1 + v3 – v4 + v5.
La KVL también se aplica en lazos que contienen un circuito abierto entre dos nodos.
Por ejemplo, el voltaje vy en la figura 20 ciertamente tiene algún valor que puede ser
medido con un voltímetro. Este valor debe satisfacer la KVL a través del lazo que
incluye CE o EC. Asi para el lazo BCEB, nosotros podemos ver que vy = v2 – v3.
Figura 21 Conexión paralela
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 27
44
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 21 ilustra una simple pero importante configuración llamada conexión en
paralelo. Hay en este circuito dos nodos identificados, X y Y. En general dos o más
elementos están en paralelo cuando sus terminales son conectadas al mismo par de
nodos.
La aplicación de la KVL en la figura 21 muestra que v2 = v1 para el lazo de la izquierda
y v3 = v2 para el lazo derecho, tenemos entonces que :
v3 = v2 = v1
Podemos concluir entonces que los elementos que se encuentran en paralelo
tienen el mismo voltaje a través de ellos.
Ejemplo: Un circuito con un transistor
Figura 22 Circuito con transistor bipolar
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 28
La figura 22 muestra un circuito que cuenta con transistor de unión bipolar. Este
transistor es un dispositivo electrónico de tres terminales que esta conectado a las
terminales B, C y E. Algunos de los voltajes y corrientes del circuito han sido
medidos, y sus valores son mostrados en la figura. Se necesita determinar los
restantes valores desconocidos aplicando la leyes de Kirchhoff’s.
45
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Primero nosotros encontraremos iB incluyendo mentalmente el transistor como un
supernodo. La KCL nos lleva a:
iB + 10mA – 10.5 mA = 0 → iB = 0.5 mA
Despues aplicamos la KVL para el lazo CEBC alrededor del transistor, para obtener:
vCE – 1V – 6V = 0 → vCE = 7V
Al obervar el dibujo observamos que:
i4 = 10 mA
v3 = 1 V
Los siguientes análisis par nodos y lazos se pueden realizar:
Nodo D
i1 = i4 + 2mA = 12 mA
Nodo A
i3 = 2mA – iB = 1.5 mA
Lazo DCEFD
v4 = 9 V - vCE = 2V Lazo AFDA
v2 = v3 – 9 V = - 8 V
El valor negativo de v2 significa, que el nodo A tiene un menor potencial que el
nodo D.
46
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 5: ANALISIS ELEMENTAL DE CIRCUITOS
Con el conocimiento previo de las leyes de Ohm y de Kirchhoff’s, estamos preparados
para
analizar
circuitos
simples
consistentes
en resistores
y fuentes ideales.
Podemos comenzar con circuitos con los elementos en serie o en paralelo.
Circuitos serie
Un circuito serie consiste totalmente
en unos elementos conectados de manera
secuencial. Por consecuencia, la corriente i que circula por los elementos es la
misma. La figura 23
muestra tres tipos de circuitos, el análisis de estos circuitos
en serie involucra el uso de la KVL y la ley de Ohm.
Figura 23 Circuitos serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 29
La fuente de corriente de la figura 5.1a fuerza a i = is, y a que vR = Ris. Al aplicar KVL
alrededor del lazo tenemos que:
vx = vR – vs = Ris – vs
Este resultado ilustra la propiedad de que en general el voltaje a través de una fuente
de corriente es establecido por los elementos conectados a esta.
El circuito abierto en la figura 23b requiere que i = 0, asi que vR = Ri = 0. Así el
voltaje resultante a través del circuito abierto esta dado por:
vx = vs – vR = vs
47
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Observe cuidadosamente que vx es igual a vs porque no hay una caída de voltaje a
través del resistor cuando i = 0.
La corriente en la figura 23c no se conoce de manera inmediata. Sin embargo al
emplear KVL obtenemos que vR = vs1 – vs2, por lo tanto:
i = vR/R = (vs1 – vs2)/R
Esta expresión nos permite llegar a la conclusión de que el voltaje efectivo a través
del resistor es la suma algebraica vs1 – vs2. Por lo tanto, dos fuentes en serie de
voltaje pueden ser combinadas dentro de una para propósitos de análisis.
Observemos también que alterar el orden de los elementos en los circuitos serie no
generá efecto sobre los voltajes y corrientes,
por lo tanto la KVL alrededor el lazo
tomara los mismos valores.
Circuitos paralelos
Un circuito en paralelo consiste en elementos conectados de forma paralela.
Logicamente de la KVL, el mismo voltaje aparece a través de cada elemento. La
figura 24 muestra tres circuitos, estan marcados con un voltaje deconocido. El análisis
de estos circuitos paralelos incluye el uso de las leyes de Ohm y de KCL. La KCL puede
ser aplicada a cualquiera de los nodos superiores o inferiores.
Figura 24 Circuitos en paralelo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 30
48
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La fuente de voltaje de la figura 24a
fuerza a v = vs , asi que iR = vs/R = Gvs,
aplicando la KCL a cualquiera de los nodos obtenemos:
ix = iR – is = Gvs – is
Este resultado nos muestra que la corriente suministrada por una fuente de voltaje es
establecida por los elementos conectados a esta.
Para el corto circuito de la figura 24b se requiere que v = 0, asi que iR = v/R = 0.
Esto es la corriente resultante a través del circuito cerrado debe ser:
ix = is - iR = is
Observe con atención que la corriente ix
es igual a is
porque no hay corriente a
través del resistor cuando v = 0.
El voltaje en la figura 24c no es conocido de manera inmediata. Sin embargo la
aplicación de KCL nos lleva a que iR = is1 - is2, en donde:
V = Rig = R (is1 - is2)
Esta expresión nos lleva a la conclusión de que la corriente efectiva a través del
resistor es la suma algebraica is1 -
is2. Por lo tanto, las dos fuentes de corriente
pueden ser combinadas en una.
Observe además que el alterar el orden de los elementos en estos o en cualquier otro
circuito paralelo no afecta los valores de voltaje y corriente, ya que la aplicación de la
KCL nos lleva a obtener los mismos valores.
Ejemplo: Conexiones serie y paralelo
Para mostrar las principales propiedades de los circuitos serie y paralelo, considere el
siguiente problema de diseño:
Un dispositivo electrónico de dos terminales está destinado a operar con vx
= 10 V y ix = 2.5 A. Usted necesita alimentar estos valores en las terminales usando ya
sea una fuente de voltaje de 12 V o una fuente de corriente de
3 A.
49
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Sencillamente los valores de las fuentes exceden los valores pedidos en las
terminales, por lo tanto se debe adicionar otro elemento, el cual puede ser una
resistencia.
La figura 25a muestra una posible solución al diseño, en la forma de un circuito serie
con una fuente de voltaje. La función del resistor Rser es la de introducir una caída de
voltaje entre la fuente y el dispositivo. La aplicación de la KVL alrededor del lazo nos
muestra que se necesita vR = 12 - vx = 2 V. Pero por
Rser circula una corriente ix.
Tenemos entonces que vR = Rser ix = Rser x 2.5 A. Obtenemos:
Rser X 2.5 A = 2V → Rser = 2 V/2.5 A = 0.8 Ω
Figura 25 Ejemplo de aplicación de análisis de circuitos
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 31
De manera alternativa es posible conectar una fuente de corriente en paralelo
como la resistencia Rpar y El dispositivo X como se observa en la figura 25b. La
función de Rpar es la ser un paso del exceso de corriente, el aplicar la KCL a cualquiera
de los nodos nos lleva a iR = 3 – ix = 0.5 A. Pero aparece un voltaje en Rpar, asi vX =
Rpar iR = Rpar x 0.5 A. Por lo tanto:
Rpar X 0.5 A = 10 V → Rpar = 10 V / 0.5 A = 20 Ω
50
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Analisis circuital de ramas:
El analisis circuital algunas veces se vuelve mas complicado cuando no se tienen todos
los elementos conectados en serie o en paralelo. Uno de los métodos de análisis de
circuitos involucrados se conoce como análisis de ramas. En el cual los voltajes o
corrientes son
asociados con los elementos individuales. Este método funciona
mejor cuando se tiene información auxiliar acerca del circuito, tal como la corriente a
través de un resistor o el voltaje a través de este.
La clave para el análisis de ramas es el cuidado con las marcas que se coloquen en el
diagrama del circuito. El propósito de este marcado es acelerar el análisis aplicando
de manera directa la ley de Ohm. El procedimiento consiste de cuatro pasos
1. Marque los elementos que están conectados en serie con la misma corriente a
través de estos, y los elementos que se encuentran en paralelo con el mismo voltaje
a través de ellos. Escoja cualquier referencia de polaridad conveniente para las
variables de rama no conocidas, siempre marque los resistores de acuerdo con la
convención pasiva.
2. Incorpore información auxiliar en las marcas. Específicamente, cuando la corriente
iR a través de un resistor R se conocida o esta fue encontrada, la marca del voltaje
debe ser vR = RiR. Lógicamente cuando vR es conocida o ha sido encontrada, la marca
de la corriente es iR = vR/R.
3. Después de que todas las variables de la rama han sido marcadas, evalue los
voltajes desconocidos
y las corrientes por aplicación sucesiva de la leyes de
Kirchhoff a lazos o ramas que involucren solamente una variable desconocida.
4. Revise sus resultados colocando entonces en el diagrama los valores y verificando
que se cumplan las leyes de Kirchhoff
51
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CAPITULO NO. 2: PROPIEDADES DE LOS CIRCUITOS RESISTIVOS
LECCIÓN 1: CIRCUITOS RESISTIVOS SERIE Y PARALELO
Los ingenieros eléctricos frecuentemente dividen un circuito completo dentro de
pequeñas unidades para facilitar el análisis o diseño. Estas pequeñas unidades son
llamadas redes. Una red puede incluir cualquier número de elementos, pero debe tener
como mínimo dos terminales disponibles para conectar fuentes u otras redes.
Resistencias en serie y potenciómetros
El circuito sencillo de carga mostrado en la figura 26a consiste de dos resistores
en serie y dos terminales externos. El voltaje instantáneo en las terminales v
corriente son producidas
y la
por alguna fuente que no es mostrada. Nosotros
necesitamos encontrar las relaciones entre i y v y los valores de los voltajes individuales
v1 y v2.
Figura 26. Resistores en serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 42
52
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ambas resistencias tiene la misma corriente i, y tenemos que v1 = R1i y v2
=R2i. Así que al aplicar KVL:
v = v1 + v2 = R1i + R2i = (R1+R2) i
Esta expresión para la relación entre las terminales de voltaje corriente tiene la
forma:
V = Rseri
Con: Rser = R1 + R2
Nosotros llamamos a Rser como la resistência equivalente.
El significado de la resistencia equivalente es mostrado en la figura 26.b, donde
resistor sencillo
un
con una resistencia Rser = R1 + R2, que remplaza a los dos
resistores. El equivalente sencillo del resistor nos mustra una corriente equivalente
i =v/Rser = v/ (R1+R2), sencillamente el resistor serial. Mientras que nosotros rara vez
hacemos este remplazo físicamente,
frecuentemente
hacemos
esto mentalmente
para propósitos de calculo. Para mostrar esto, si v = 20 V, R1 = 3 Ω y R2 = 2 Ω,
entonces Rser = 3 + 2 = 5 Ω y i = 20V / 5 Ω = 4 A. O si el voltaje varia en el tiempo, de
forma que v (t) = 20 cos wt V, entonces i (t) = v (t)/ Rser = 4 cos wt A.
La resistencia equivalente en serie es uno de los conceptos más amplios de redes
equivalentes de dos terminales, y otros aspectos surgen a partir de estos. En
términos generales:
Las redes de dos terminales son equivalentes si estas tienen exactamente las
mismas características de voltaje – corriente en sus terminales.
Las condiciones
aplicadas a las terminales de una red compleja pueden ser
calculadas de manera más sencilla usando un red equivalente más simple. Sin
embargo, las condiciones incluidas dentro de la red pueden ser diferentes. Por ejemplo,
el resistor equivalente en la figura 26b claramente se diferencia de las dos resistores
en serie de la figura 26a porque los voltajes individuales v1 y v2 existen en una red
pero no en la otra.
53
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ahora suponga que usted conoce el voltaje en las terminales en la figura 26a y usted
necesita los valores de los voltajes a través de R1 y R2. Por tanto v1 = R1i; v2 = R2i, y i
= v/ Rser = v/ (R1+R2), entonces encontramos que:
R1
R1 +
R2
v1 =
v
=
v2
R2
v
R1 + R2
Estas relaciones indican que el voltaje total v es “dividido” entre los dos resistores,
produciendo el voltaje v1 y v2. Sin embargo observamos que la misma corriente pasa
por el divisor de voltaje.
El divisor de voltaje es empleado en el análisis de circuitos. La relación obtenida
mostrada en la ecuación anterior determina los valores de v1 y v2 en función de v,
independiente del valor de i. Esta ecuación también se útil en el diseño de redes
cuando se necesite seleccionar R1 y R2 para satisfacer ciertos valores de v1 y v2.
Ahora consideremos la red con N resistores mostrados en la figura 27. La resistencia
equivalente es:
Rser = R1 + R2 +…..+ RN
Es
decir
que
el
valor
de
siempre
será
mayor
que
los
individuales de resistencia.
Figura 27. Resistores en serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 43
54
valores
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El voltaje vn a través de cualquier resistor Rn será encontrando mediante la siguiente
ecuación:
Vn =
Rn
R
v= n
v
Rser
R1 + R2 + .. + R N
Otra interesante red resistiva es un potenciómetro, o “pot”. La figura 28 muestra el
símbolo y el esquema de este elemento. Este cuenta con un valor de resistencia
variable
FIGURA 28 Potenciometro
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 43
55
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Dependiendo de donde se encuentre el punto de ajuste W; en la realidad este cuenta
con un selector que
rota dependiendo del nivel deseable de resistencia;
potenciómetros
empleados
son
para
el
ajuste
los
de condiciones en muchos
circuitos electrónicos
Resistencias en paralelo
La figura 29 nos muestra n resistores en paralelo, donde se tiene un voltaje v a través
de cada uno. Para efectos
de análisis
se remplazan
las resistencia por su
equivalente en conductancia donde G1 = 1/R1, G2 = 1/R2, etc.
Figura 29. N resistencias en paralelo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 45
La corriente a través de R1 es i1 = v/R1 = G1v; al aplicar la KCL para las otras
corrientes:
i = i1 + i2 +…..+ iN = G1v + G2v +…. + GNv
= (G1 + G2 +…. + GN) v
Esta expresión puede mostrarse como:
i = Gparv
Con Gpar = G1 + G2 + …. + GN
56
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Esta es la conductancia en paralelo equivalente
Y la correspondiente resistencia paralelo equivalente será Rpar = 1/ Gpar,
esto es al reescribir la ecuación:
1
1
=
+
R par
R1
1
1
+ …..+
R2
RN
El valor de Rpar será siempre menor que el menor valor individual de resistencia.
Para el caso donde se tengan dos resistencias en paralelo el valor equivalente
de la resistencia en paralelo será:
Rpar =
1
+
−1
1
R1
=
R2
R1 R2
R1 + R2
57
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 2: DUALIDAD
Cuando estudiamos las ecuaciones de las resistencias serie conectadas y de las
conductancias en paralelo conectadas encontramos afinidades. Estas similitudes no
son accidentales, son una consecuencia del principio conocido como dualidad.
Para entender este principio de manera más clara observemos las redes paralela y
serial de la figura 30 y el listado de varias relaciones en la tabla
1, usando resistencias para la red serial y conductancias para redes paralelas.
Figura 30 Redes duales serie y paralelo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 50
Red serie
Red paralela
58
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ecuación de rama KVL
Ecuación KCL de nodo i =
v = v1 + v2 = R1i+ R2i
i1 + i2 = G1v + G2v
Resistencia equivalente: Conductancia equivalente
Rser = R1 + R2
Gpar = G1 + G2
Divisor de voltaje:
Divisor de corriente
v1 =
R1
v
R1 + R2
i1 =
G1 + G2
G1
i
Circuito abierto:
Corto circuito
v1 = v cuando R1 →∞
i1 = i cuando G1 →∞
TABLA 1 Dualidad
Observe que cada ecuación a un lado de la tabla es idéntica a la ecuación
correspondiente
en el otro lado excepto por un cambio en los símbolos,
nominalmente v es intercambiada por i, y R es intercambiada con G. Nosotros
podemos entonces decir que estas redes son duales. En general:
Dos redes diferentes son duales cuando las ecuaciones de corriente – voltaje
que describen a una de ellas tienen la misma forma matemática que las
ecuaciones de corriente voltaje de la otra con las variables de voltaje y corriente
intercambiables.
EJEMPLO: CONSTRUYENDO UN CIRCUITO DUAL
Mediante el análisis del circuito de la figura 31a se necesita construir el circuito dual
para el problema.
Por intercambio
de voltaje y corriente;
resistencia
y conductancia, podemos
conocer que el circuito dual debe contar de una fuente de corriente de 12 A, y
una fuente de voltaje de 5 V y unas conductancias de 2 S, 3 S y 8 S. Sin embargo
observamos que la configuración de la izquierda tiene una fuente de voltaje y dos
59
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
resistencias en serie con una corriente i1 a través de estos, entonces el equivalente dual
de la derecha debe tener una fuente de corriente con dos conductancias en paralelo
con un voltaje v1
a través de ellos. El diseño del circuito dual nos lleva a la
configuración de la figura 31 b.
Al comparar las ecuaciones de los circuitos podemos confirmar su dualidad:
Circuito original
Circuito dual
i1 = v2/8 + 5A
v1 = i2/8S +
v2 = 12 V – ( 2Ω + 3Ω)i1
5V
i2 = 12 A – (2S +
3S)v1
Figura 31 Construcción de una red dual
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 52
60
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 3: CIRCUITOS CON FUENTES CONTROLADAS
Las
fuentes
que
hemos
definido
en la lección
2 son
clasificadas
como fuentes
independientes porque el voltaje y la corriente de la fuente no dependen de cualquier
otro voltaje o corriente. Pero cuando se modelan amplificadores y otros dispositivos
electrónicos, es necesario trabajar con fuentes que dependan de algún otro voltaje o
corriente. Estas son conocidas como fuentes dependientes o controladas.
Fuentes Controladas
Para entender este concepto observemos la figura 32a en donde el voltaje de salida en el
amplificador esta dado por vout = 100 vin. El amplificador no es representado por todos sus
elementos, en su lugar es empleado un modelo como el de la figura 32 b. La figura en
forma de diamante es el estándar para una fuente de voltaje vout controlada por otra
fuente de voltaje vin.
Figura 32 Modelo de un amplificador de audio
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 54
61
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Cualquier fuente de voltaje que dependa de otro voltaje es denominada como una
fuente de voltaje controlada por voltaje (VCVS). La figura 33a muestra el símbolo
general para una fuente VCVS. La fuente de voltaje varía en proporción directa a
algún otro voltaje vx, a pesar de la corriente i a través de la fuente, así que:
vc = µvx
Se conoce a vc como la variable de control, y esta debe aparecer en cualquier
lugar junto con la fuente controlada. La constante de proporcionalidad µ es una cantidad
conocida como la ganancia de voltaje. Con un valor apropiado de µ, una VCVS puede
representar un amplificador lineal o un dispositivo de amplificación de voltaje.
Figura 33 Simbolos de las fuentes controladas
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 54
62
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El dual de una VCVS es una fuente de corriente controlada por corriente (CCCS),
simbolizada como se muestra en la figura 33b. Esta corriente produce:
ic = βix
La cual es independiente de v. Así, ix es la variable de control, y β es una constante que
representa la ganancia de corriente. En los circuitos electrónicos una CCCS
frecuentemente representa la propiedad de amplificación de corriente de un transistor
de unión bipolar.
Pero la corriente a través de un transistor de efecto de campo depende de un voltaje
que controla la corriente, el símbolo para la fuente de corriente controlada por voltaje
(VCCS), es mostrado en la figura 33c. Esta fuente produce:
ic = gm vx
Independiente del voltaje a través de la fuente. La constante gm es llamada
transconductancia porque esta representa un efecto de “transferencia” de voltaje –
corriente y tiene las mismas unidades como conductancia.
Finalmente el dual de una VCCS es la fuente de voltaje controlada por corriente
(CCVS) mostrada en la figura 33d, donde:
Vc = rmix
Este voltaje es independiente de la corriente i a través de la fuente. La constante rm
es llamada transresistencia porque se tiene un efecto de transferencia de corriente –
voltaje con las mismas unidades como resistencia.
Las fuentes revisadas son elementos lineales en los cuales el voltaje o corriente
controlado es directamente proporcional a la variable de control. Como consecuencia
del efecto de control, podemos decir que:
Una fuente controlada produce un voltaje o corriente solamente cuando una
fuente independiente activa la variable de control.
63
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
EJEMPLO: AMPLFICADOR CON UN TRASISTOR DE EFECTO DE CAMPO
La figura 34 es el modelo de un amplificador sencillo de voltaje construido con un
transistor de efecto de campo. Nosotros desarrollaremos una expresión para el voltaje
de salida en términos del voltaje de entrada, dada la transconductancia de valor gm = 5
x 10-3 S =5 mS.
Figura 34 Modelo de un amplificador de voltaje
con transistor de efecto de
campo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 56
El voltaje de entrada produce que el voltaje de control vg se obtenga por un divisor de
voltaje, asi que vg = (5/6) vm. La VCCS entonces genera la salida de corriente iout = -gm
vg, lo cual no lleva a que la salida de voltaje sea vout =
6kΩ x iout.
Así que:
vout = 6kΩ x [-(5 mS) x (5/6)vin] = - 25vin
El valor negativo aquí significa que
vout es negativo cuando vin
viceversa, mostrándonos que el circuito es un amplificador inversor.
64
es positivo y
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 4: LINEALIDAD Y SUPERPOSICIÓN ELEMENTOS
LINEALES Y CIRCUITOS
Anteriormente se ha dicho que los resistores son elementos lineales porque el
voltaje y corriente varían en proporción directa uno al otro. Las fuentes controladas
tratadas en la lección anterior también son elementos lineales porque sus valores de
fuente varían en proporción directa a las variables de control. Podemos decir entonces
que:
Un circuito es lineal cuando este consiste enteramente de elementos lineales y
fuentes independientes.
Si consideramos cualquier circuito lineal con carga, con un par de terminales
externas. La fuente externa aplicada a la red debe conllevar a un voltaje o una
corriente, al dejar nosotros la variable x para representar el valor instantáneo de la
fuente. Si dejamos además la variable y como el valor instantáneo para cualquier
variable de interés – puede ser voltaje o corriente - . Esta notación normalmente
denomina a la excitación x y la respuesta resultante y.
La relación entre la causa y efecto es decir entre x – y puede ser representada
matemáticamente como alguna función de la forma:
y =f(x)
Sencillamente si nosotros estamos tratando con un circuito lineal, entonces f(x)
ser
una
función
superposición.
lineal
que
tenga
las
propiedades
debe
de proporcionalidad
y
La propiedad de proporcionalidad significa que si la excitación es
incrementada o decrementada por algún factor de multiplicación digamos K, entonces
la respuesta se convierte en:
f(Kx) = kf(x)
60
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La propiedad se superposición significa que si la excitación consiste en la suma o de
dos componentes, digamos xa + xb, entonces la respuesta se convierte en:
f(xa + xb) = f(xa) + f(xb)
Podemos combinar estas dos propiedades escribiendo:
f (Kaxa + Kbxb) = Kaf(xa) + Kbf(xb) Donde Ka y Kb son constantes arbitrarias.
TEOREMA DE SUPERPOSICION
Para circuitos con múltiples fuentes, la superposición es frecuentemente empleada
en el análisis. Este teorema establece que:
Cuando un circuito lineal cuenta con dos o más fuente independientes, el
valor de cualquier variable de rama es igual a la suma algebraica de todas las
contribuciones individuales de cada una de todas las fuentes independientes
con todas las otras fuentes puestas a cero.
Para suprimir las fuentes se debe seguir con los siguientes remplazos: Las fuentes
ideales de voltaje se remplazan por un corto circuito
Las fuentes ideales de corriente se remplazan por un circuito abierto.
EJEMPLO: CÁLCULO EMPLEANDO EL TEOREMA DE SUPERPOSICION
Dado el circuito de la figura 35 nosotros necesitamos calcular el valor de i1 usando
superposición. Encontramos que hay tres fuentes independientes y no hay
61
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 35 Calculos de superposición
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 64
Fuentes controladas,
la superposición
involucra el análisis para tres circuitos
con fuente sencillas.
Primero
se
encontrará
la
contribución
de
i1
de
la
fuente
de
30
V
remplazando las fuentes de corriente por un circuito abierto. El resultado se muestra en
la figura 35b, la cual incluye las líneas punteadas para mostrar las fuentes que se
suprimieron. El resultante es un circuito serie, asi que inmediatamente obtenemos que:
i1-1 = 30/(6+4+2) = 2.5 A
Segundo encontramos la contribución de la fuente de 3 A remplazando la fuente de
voltaje por un corto circuito y la otra fuente de voltaje por un circuito abierto. El
circuito equivalente se muestra en la figura 35b mostrando que el resistor de 4
Ω esta ahora en parlelo con la combinación en serie de 6 Ω y 2Ω. Asi que el divisor de
corriente no muestra que:
i1-2 = 4/(6+2) + 4 x 3 = 1A
62
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
En tercer lugar encotramos la contribución de la fuente de 8A suprimiento las otras
dos fuentes. El diagrama resultante se muestra en la figura 35d con otro divisor de
corriente, pero la fuente de corriente de 8 A divide la corriente en la dirección opuesta
de referencia para . Asi que:
i1-3 = 6/6 + (2+4) * (-8) =
-4A
Finalmente, con todas las fuentes activas el valor de i1 esta dado por la suma
algebraica:
i1 = i1-1 + i1-2 + i1-3 = 2.5 +1 -4 = -0.5 A
63
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 5: REDES THEVENIN Y NORTON TEOREMAS DE THEVENIN Y NORTON
Estos teoremas
corresponden al comportamiento de una red que contiene fuentes
independientes. Inicialmente se definirá una red fuente:
Como una red de dos terminales que contiene en su totalidad elementos no lineales
y fuentes, incluyendo como mínimo una fuente independiente. Si hay fuentes
controladas presentes, entonces las variables de control deben estar incluidas dentro
de la misma red.
Figura 36: Red fuente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 66
La polaridad de referencia para las variables v e i se muestran en la figura
36 asumiendo que la fuente de la red suministra potencia cuando se conecta a la
carga.
Se define según la figura 36 cuando las terminales se encuentran abiertas y la
corriente i = 0 el voltaje resultante de circuito abierto voc.
Cuando tenemos las dos terminales en corto circuito, entonces v = 0 y se define la
corriente resultante de corto circuito ioc.
Para una red sencilla lineal la línea recta de corriente – voltaje se muestra en la figura
37, la cual no muestra que el punto donde i = 0 es voc y cuando v = 0 se tiene ioc .
64
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La pendiente de la línea de voltaje – corriente es llamada Rt
Donde Rt = voc / ioc
Se conoce a Rt en una red como resistencia Thevenin. Para propósitos de análisis el
teorema de Thevenin establece que:
Cualquier red resistiva con fuentes lineales puede ser representada con una
fuente ideal de voltaje de valor voc
en serie con un resistor teniendo una
resistencia Rt.
La figura 38 muestra la red equivalente del Teorema de Thevenin. Con cualquier
valor de i, nosotros vemos que el voltaje terminal de la red Thevenin está dado
por:
v = voc - Rt i
Si se tiene i = 0 entonces v = voc . Al mismo tiempo si v = 0 se tiene que i = voc / Rt =
ioc. Por tanto la ecuación anterior no expresa de manera exacta la grafica de la figura 37
c.
Figura 37 Ramas equivalentes
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 67
De la misma manera el teorema de Norton establece que:
Cualquier red resistiva lineal puede ser representada por una fuente de corriente
ideal de valor isc en paralelo con una resistencia en paralelo Rt.
65
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 38 Redes equivalentes
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 68
El diagrama de la figura 38b corresponde a la red equivalente Norton, cuya estructura
es el dual de la red Thevenin. Con cualquier valor de v, la corriente de las
terminales para una red Norton está dada por:
i = isc – v/Rt
Teniendo los parámetros de la red podemos usarlos para determinar el equivalente
Thevenin o Norton para predecir el comportamiento de la red fuente. Esta estrategia
es de particular valor cuando usted necesita investigar que ocurre en las terminales
del circuito con cargas externas, o cuando se desea diseñar otra red para conectar a la
red fuente.
EJEMPLO: La figura 39a muestra una red fuente conectada a un resistor de carga
RL. La aplicación en cuestión busca dos diseños diferentes para el hallar el valor de
RL.
66
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 39 Red equivalente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 70
67
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Un valor debe ser tal que v = 24 V, y la otra debe ser tal que i = 8 A. Nosotros
también necesitamos evaluar la corriente i1 suministrada por la fuente de voltaje en
cada caso.
El problema envuelve el cumplimiento de las condiciones de carga; se empleara
una red equivalente. Lo primero que se hará; es determinar los parámetros de la red
Thevenin.
Primero se calcula el voltaje de circuito abierto voc como se muestra en la figura 39.b.
Simplemente por los dos resistores circula la misma corriente, al aplicar el divisor de
voltaje, tenemos que:
voc = 20/(5+20) x 50 = 40 V
Nosotros entonces calculamos isc de la condición de corto circuito como se muestra en
la figura 39c. El corto circuito genera que la resistencia de 20 Ω quede en corto, asi que:
isc = 50/5 = 10 A
Encontramos la resistencia Thevenin: Rt = voc / isc = 40/10 = 4Ω.
Ahora encontramos el valor de diseño de RL que cumpla que v = 24 V
sustituyendo el equivalente Thevenin para la fuente red como se muestra en la figura
39d. Así que tenemos un nuevo divisor de voltaje; en el cual:
v = RL / (4 + RL) x 40 = 24 V Al despejar, RL = 6 Ω.
Entonces encontramos el valor de diseño de RL que satisfaga que i = 8 A, al sustituir
la red Norton equivalente, como se muestra en la figura 39e. Tenemos un divisor de
corriente en donde:
i = 4/ (4 + RL) x 10 = 8 A Al despejar el valor de RL = 1 Ω
68
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CAPITULO 3: APLICACIONES DE LOS CIRCUITOS RESISTIVOS
LECCIÓN 1: FUENTES REALES Y TRANFERENCIA DE POTENCIA
Las fuentes reales como las baterías y los generadores, se diferencian de las fuentes
ideales en dos aspectos: el primero es que las fuentes reales no pueden suministrar
una cantidad ilimitada de potencia. Segundo es que las fuentes de potencia disipan
potencia internamente.
Modelos de las fuentes y cargas
Una fuente real de voltaje se caracterizan en parte por la medida de su voltaje terminal
v = vs en condiciones de circuito abierto. Pero con un incremento de corriente de
la fuente, el voltaje v típicamente decrece tal como se muestra en la figura 40a.
Tal comportamiento es de hecho no lineal.
Figura 40 Modelo de una fuente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 87
67
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Sin embargo, nosotros usualmente operamos
una fuente real de voltaje con una
corriente lo suficientemente pequeña como para aproximar el comportamiento al de la
linea punteada de la figura 40a. La pendiente de esta línea es denotada por –Rs, y
las relaciones de corriente voltaje se pueden expresar como:
V=vs Rsi
Se denomina a vs el voltaje de la fuente,
y Rs es la resistencia de la fuente,
esta resistencia interna causa una caída de voltaje interno y una potencia de disipación
de potencia cuando la corriente es diferente de cero.
Figura 41 Fuente de corriente real
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 87
Una fuente real de corriente también muestra un comportamiento no lineal, similar al de
la curva de la figura 41. Pero cuando la fuente opera con un voltaje lo suficientemente
pequeño, podemos usar
una aproximación del modelo de recta lineal como lo
muestra la línea de segmentos, la relación de corriente voltaje será:
i = is – v /Rs
68
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El modelo del elemento se muestra en la figura 41b consta de una fuente de
corriente ideal is con una resistencia en paralelo Rs similar a una red Norton..
La fuente de corriente de la figura 41b puede ser convertida en la fuente de corriente de
la figura 40b, o viceversa.
La distinción entre la operación de las fuentes surge cuando en la práctica se examina
el efecto de carga que ocurre cuando una carga variable es conectada a una fuente real
de voltaje o corriente.
Figura 42. Fuentes de voltaje y corriente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 88
Al considerar el efecto de agregar una resistencia de carga RL a una fuente tal como se
muestra en la figura 42. Por divisor de voltaje obtenemos el voltaje para la carga:
69
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
v = vs – Rsi =
RL
vs
RL + RS
La resistencia interna genera que el voltaje en la carga sea menor que el voltaje de
circuito abierto vs.
Al observar el efecto sobre una fuente de corriente, encontramos que según el
divisor de corriente:
i = is – v/Rs =
Rs
is
Rs + RL
Donde la corriente interna v/Rs causa que la corriente de carga i es menor que la
corriente de circuito abierto is .
MAXIMA TRANSFERENCIA DE POTENCIA
Además del efecto causado por la carga, la resistencia interna limita la cantidad de
potencia que puede transferir una fuente a una resistencia de carga. Evaluaremos esta
situación para determinar la máxima potencia transferida y la eficiencia de la potencia
transferida.
El teorema de máxima transferencia de potencia establece que:
Si una fuente tiene una resistencia fija interna Rs, entonces la máxima potencia
transferida a la resistencia de carga requiere que RL = Rs.
Es decir que la resistencia de carga sea igual a la resistencia interna. De manera formal
se define la eficiencia de la potencia trasferida como Eff.
Eff = pL/pL + ps
70
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde pL es la potencia de la carga y ps es la potencia disipada internamente.
Cuando ps = pL entonces Eff = 0.5 = 50 %
EJEMPLO: CALCULO DE LA POTENCIA TRANSFERIDA Y EFICIENCIA
La figura 43 representa una herramienta eléctrica conectada por una extensión larga
conectada a una fuente de 120 v. Electricamente la herramienta eléctrica tiene una
carga variable cuya resistencia depende de la cantidad de trabajo que se está
haciendo. Nosotros podemos calcular los valores de potencia y eficiencia para varios
valores de RL.
El equivalente de la fuente aplicada a las terminales de la herramienta de potencia
tiene vs = 120 V y Rs = 0.2 + 4.8 = 5Ω, el cual incluye la resistencia del
alambre de
Figura 43: Modelo de una herramienta de potencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 92
Extensión porque la potencia disipada allí es potencia desperdiciada. La máxima
transferencia de potencia ocurre cuando RL = 5 Ω, y la potencia resultante entregada
a la herramienta será:
Pmax = (120 V)2/(4 x 5 Ω) = 720 W
71
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Este valor corresponde a un caballo de potencia (hp), en donde:
1 hp = 746 W
Pero con RL = RS, el voltaje terminal a la herramienta será de vs/2 = 60 V, las
resistencias de 0.2 y 4.8
juntas disipan ps = pmax = 720 W, y la eficiencia de la
potencia trasferida es de 50 %. Sin embargo, el alambre de extensión puede ser
destruido por excesivo calentamiento, debido a que circula una corriente de i = 120 V/
(5+5) Ω = 12 A.
Una carga mas realista puede ser RL = 35Ω, en este caso i = 120 /40 = 3
A, v = 120 – 5i = 105 V, pL = 35 i2 = 315 W aprox 0.4 hp, ps = 5 i2 = 45 W, y
Eff = 315 / (315 + 45) aprox 88 %.
72
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 2: MODELOS DE AMPLIFICADORES
Los amplificadores
generalmente
amplian
la variación de una señal eléctrica
representada por una forma de onda de voltaje o corriente. La amplificación es
lograda con la ayuda de un dispositivo electrónico, primariamente los transistores, estos
tienen la capacidad para controlar el aumento de voltaje o corriente en proporción a
un pequeño voltaje de entrada variable. Normalemente, el aumento de voltaje
o
corriente es controlado por otro elemento que comúnmente es una fuente de
entrada, asi que todos los amplificadores
necesitan
una fuente de potencia
apropiada – usualmente una batería o un circuito electrónico para una conversión
ac – dc.
La figura 44 representa un amplificador de voltaje como una “caja negra” con un par
de terminales de entrada y un par de terminales de salida. La fuente conectada a la
entrada genera un voltaje variante en el tiempo vs (t), y el amplificador produce un
mayor voltaje de salida con una forma de onda vout(t) a través de la carga mostrada.
Idealmente la acción del amplificador es expresada por la relación simple lineal:
vout(t) = Avvs(t)
Donde Av denota la ganancia total de amplificación.
73
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 44 Amplificador de voltaje
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 94
La figura 44 b muestra la curva de transferencia típica para las formas de onda de un
amplificador lineal de voltaje con Av < -1
Para describir las relaciones entre las terminales se emplea el modelo de un circuito
equivalente de la figura 45. Este modelo genérico contiene una resistencia de entrada
Ri para mostrar la propiedad que se dibuja con la corriente aplicada desde la fuente de
voltaje vs. La amplificación de vin es modelada por una VCVS son una ganancia µ,
la cual puede
ser una cantidad positiva para un amplificador no inversor o una
cantidad negativa para
un
amplificador
inversor.
En
juntos
casos,
la
VCVS
representa el voltaje de circuito abierto vc = µvin.
Figura 45 Modelo de un amplficador de voltaje
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 94
El modelo también incluye una resistencia de salida Ro, contabilizando la potencia
disipada al interior del amplificador. El lado de la salida toma la forma de una red
Thevenin, Ro es igual a la resistencia Thevenin equivalente vista desde atrás de
las terminales de salida del amplificador con la fuente de entrada suprimida. La
fuente de poder que alimenta al amplificador no aparece en el modelo porque esta es
representada indirectamente por la fuente controlada cuya potencia se convierte desde
la potencia suministrada.
74
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 46 Modelo de un amplificador de corriente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 95
Ciertos circuitos electrónicos inherentemente amplifican más corriente que voltaje. El
modelo genérico de un amplificador de corriente se muestra en la figura 46 tiene
también dos pares de terminales, pero la variable de control es ahora la corriente
de entrada a través de Ri. De acuerdo con esto, se muestra una fuente de corriente
aplicada a la entrada, y se representa la amplificación por una CCCS con una ganancia
β produciendo una corriente de salida de corto circuito ic = βiin . El lado de la
salida entonces toma la forma de una red Norton consistente en una CCCS en paralelo
con la resistencia equivalente Thevenin de salida Ro.
75
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 3: AMPLIFICADORES OPERACIONALES AMP – OP
Es un circuito integrado que apareció inicialmente en 1940 como un circuito de tubo de
vacio diseñado por George A. Philbrick Co., y la versión actual de este integrado fue
introducido por Fairchild Semiconductor en 1965.
Actualmente el nombre de “amplificador operacional” se refiere a una gran familia de
unidades de propósito – general y de propósito – especial cuya característica principal
es que proveen una alta ganancia de amplificación de la diferencia entre dos entradas
de voltaje.
Las dos entradas de voltaje vp y vn y la salida de voltaje vout son mostrados en el
esquema del amplificador
operacional en la figura 47a.Estos tres voltajes son
medidos con respecto a un sencillo punto de referencia identificado por el emblema
de tierra. El punto de tierra es establecido externo a las conexiones del op-amp por
la fuente de alimentación.
Figura 47 Diagrama de un amplificador operacional
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 98
La mayoría de los amplificadores operacionales operan con dos fuentes de voltaje dc
iguales, aquí marcadas como +Vps y – Vps. El punto de tierra es entonces tomado al
nodo donde es conectado el menor potencial de la fuente de alimentación positiva o
al potencial mayor de la fuente de alimentación negativa. El arreglo
76
permite que la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
salida de voltaje tenga cualquier valor en el rango desde –Vps a – Vps.
Aunque el voltaje dc de alimentación es esencial para la operación. El símbolo del
amplificador operacional es mostrado en la figura 47b, donde los niveles de las
terminales vp, vn y vout denotan las señales de voltaje medidas son respecto a tierra.
La terminal de entrada marcada como + es llamada la entrada no inversora, y la
terminal marcada como – es la entrada inversora. Los voltajes vp y vs aplicados a
estas terminales pueden tener cualquier polaridad. El voltaje resultante a través de las
terminales de entrada es la diferencia de potencial.
vd = vp – vn
La diferencia de voltaje controla totalmente la salida de voltaje.
Cuando el amplificador trabaja en el medio de su curva de transferencia, se tiene que
vout = Avd = A(vp - vn)
Cuando se opera en la región lineal, el amplificador se comporta esencialmente como
el modelo de la figura 48. Este modelo tiene un circuito abierto en las terminales
de entrada, asi que ip = in = 0, y una fuente VCVS produciendo una terminal de
salida Avd. La característica de un amplificador operacional es la gigante ganancia A
– usualmente 10.000 o más.
Figura 48 Modelo simplificado del amplificador operacional
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 99
77
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Pero para que se cumpla el modelo del op – amp el voltaje de salida vout debe estar
en el siguiente rango:
-Vps < vout < +Vps
Si se tiene una ganancia de amplificación típica de A > 104, y la fuente de alimentación
rara vez excede los 30 V, la variación de la diferencia de voltaje debe ser limitada
a:
vd < vmax < 3 mV
De otra manera con vd > max el amp-op se satura y la forma de onda de salida se
convierte en distorsionada.
En vista de la limitación de vd, un amplificador operacional solo no es un amplificador
práctico porque este puede entrar en saturación por cualquier señal cuya variación
exceda unos pocos milivoltios.
En consecuencia un amp-op lineal siempre incluye una realimentación negativa
conectando la terminal de salida a la terminal no inversora, para prevenir la saturación.
Amplificador operacional no inversor
EL circuito del amp-op en la figura 49a funciona como un amplificador de voltaje no
inversor, significa que vout tiene la misma polaridad de vin. La entrada es aplicada
directamente a la terminal no inversora. El resistor RF y R1 constituyen la conexión de
realimentación desde la salida a la terminal no inversora.
Figura 49 Diagramas de un amplificador operacional
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 100
78
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La ganancia de voltaje Av
para esta configuración está dada por la siguiente
expresión:
Av = v out = R F + R1
Rz
Vs
79
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Por lo tanto al diseñar se puede “moderar” la amplificación Av seleccionando
los valores apropiados de RF y R1. En la práctica las resistencias externas deben estar
en el rango de valores de 1 kΩ a 100 kΩ.
Amplificador operacional lineal
Los circuitos de amplificadores inversores cuentan con las características principales:
La magnitud de la diferencia de voltaje es muy pequeña.
El valor de la salida de voltaje es esencialmente independiente de la ganancia
del amp – op.
Las corrientes entrantes en las terminales inversoras y no inversoras son
insignificantes.
La resistencia de salida es insignificante.
Figura 50. Simbolo del amplificador operacional ideal
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 104
Un amplificador operacional ideal tiene una ganancia infinita, esto es
A=∞
Ya que vout = Avd , se puede llegar a la conclusión de que vout se vuelve sin límites. Pero
la realimentación negativa permite que la salida permanezca finita. El símbolo para el
amp – op ideal se muestra en la figura 50
Circuitos inversores y sumadores con Amp- op
80
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 51.a muestra un amplificador de voltaje inversor. El voltaje de entrada es
aplicado a través de R1 a la terminal inversora, mientras la entrada no inversora es
conectada a tierra, así que vp = 0. El voltaje de salida para esta configuración está dado
por la expresión.
Vout = R1
RF
v
in
El circuito amplifica la señal por un factor RF/R1 e invierte la señal de salida. Cuando
R1 = RF, el circuito se convierte en un inversor de ganancia unitaria con vout = - vin.
Figura 51 Aplicaciones del amplificador operacional
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 106
Al conectarse un resistor de entrada adicional a la terminal inversora se crea un
amplificador inversor sumador como se muestra en la figura 52. La
salida total está dada por la expresión
Vout = -
RF
v +
R R
F
1
1
2
= -(RF/R1)(v1 + v2)
v2
R
R2 = R1
Por lo tanto el circuito suma, amplifica e invierte las dos señales de entrada. Las
expresiones anteriores se pueden generalizar par el caso de tres o más entradas.
80
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 52. Amplificador operacional sumador
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 107
81
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 4: RESISTENCIAS INTERNAS DEL AMP – OP
Inicialmente se omitieron las resistencias de entrada y salida de un amplificador
operacional. Estas se incluyen en el modelo más completo que se muestra en la
figura 53, donde se tiene un valor grande pero finito de resistencia de entrada ri y un
valor pequeño pero no cero para la resistencia de salida ro. La mayoría de amps – op
tiene ri > 100 kΩ y una ro
< 200Ω. Sin embargo la realimentación negativa en un amp – op hace que
la resistencia equivalente de entrada se mucho mayor que ri y la resistencia
equivalente de salida mucho menor que ro.
Figura 53 Modelo del amplificador operacional
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 110
El diagrama de la figura 54 muestra un amplificador no inversor con el modelo de
la figura 53. Este también
incluye
la resistencia
debida
a la fuente Rs y la
resistencia de carga RL a la salida. La resistencia equivalente de entrada es Ri = vin/iin.
Al realizar manipulaciones algebraicas, y tomando las siguientes aproximaciones:
RL > ro
R1+RF>>ro
Ari>>RF + ro + RFro/RL
82
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 54 Amplificador no inversor
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 110
La expresión para Ri se reduce a la expresión aproximada:
Ri ≈ (1 + AB)ri
En donde B = R1/(R1 + RF)
De igual forma para la resistencia de salida, si se tiene en cuenta las siguientes
aproximaciones:
Ri >> R1
AR1>>ro
Podemos obtener aproximadamente:
Ro ≈
ro
1 + AB
83
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
En un amplificador no inversor debería tenerse que AB>>1, la resistencia de entrada
Ri usualmente puede ser mayor que la resistencia de salida Ro.
Ejemplo: Fuente con un seguidor de voltaje
Las variaciones de temperatura de un sensor pueden ser mostradas en un display o en
una pantalla grafica. El sensor tiene una resistencia de fuente de 2400Ω y genera vs
= 1 a 4 V, dependiendo de la temperatura. La pantalla tiene un rango de full
escala de 5 V y una impedancia de entrada de 600Ω.
Si el sensor es conectado directamente a la pantalla, entonces la carga reduce el
voltaje terminal a
600v s
V=
2400 + 600
= 0.2 – 0.8 V
Lo cual es una muy pequeña fracción del rango grafico de 5 V. Para obtener un
mejor rango grafico, un seguidor de voltaje es insertado como buffer entre el sensor y la
pantalla. Esta es la configuración que se necesita analizar.
El seguidor de voltaje tiene RF = 0 y R1 = ∞ asi que B = 1. Podemos asumir
4
conservadoramente un amplificador con A = 10 , ri = 100 kΩ, y ro = 200Ω. Así que 1 +
AB ≈ 104, las resistencias de entrada y salida son:
Ri ≈ 104 x 105 = 109 Ω
Ro ≈ 200/104 = 0.02 Ω
84
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La amplificación de voltaje de circuito abierto está dada por: Vout-oc / vin = A/(1+A) =
0.99990
La figura 55 muestra el circuito equivalente resultante. Por cadena de
expansión,
Esto es vout = 0.99986vs ≈ 1 - 4 V
Figura 55 Circuito equivalente resultante
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 112
Lo cual hace un mejor uso del rango grafico. También observe que la máxima
corriente de entrada es solamente 4 V/ [(2400 + 109)Ω] ≈ 4 x 10-9
A. Entonces se puede asumir de manera correcta que Ri ≈ ∞ y Ro = 0.
85
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 5: MEDICIONES Y MEDIDORES DC
En la rutina de las mediciones eléctricas es empleado usualmente un multimetro. Este
versátil
instrumento
contiene
dispositivos
sensibles, circuitos auxiliares, e
interruptores que permiten medir voltaje, corriente o resistencia en diferentes rangos.
Los multimetros modernos tienen un dispositivo electrónico sensible con una pantalla
digital. Pero anterior a los dispositivos electrónicos integrados en circuitos, el
dispositivo sensible fue electromecánico y una pantalla análoga. Los medidores
análogos tienen la ventaja
ampliamente
del
bajo
costo,
y
las
pantallas
análogas
son
aun usadas para paneles de funciones sencillas y multimetros
económicos.
Voltímetros y Amperímetros
El corazón de un medidor análogo es usualmente un medidor de movimiento
de D’Arsonval cuya estructura se muestra en la figura 56. Este dispositivo sensible
Figura 56 Medidor de movimiento de D’Arsonval
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 113
86
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Electromecánico consta de un imán permanente con forma de herradura el cual tiene
una bobina suspendida en el campo magnético. La ubicación de la bobina es tal que
cuando fluya una corriente por la bobina se desarrolle un par electromagnético (EM),
y esta pueda girar libremente. Se cuenta además con unos resortes de control
sujetos a la bobina móvil; el par magnético de estos resortes contrarrestan el par
electromagnético de la bobina.
Cuando por la bobina circula una corriente constante, la deflexión de constante de la
aguja es proporcional a la cantidad de corriente. El punto máximo
de
deflexión
corresponde a la corriente Ifs. Las deflexiones pequeñas son proporcionales a la
corriente sobre un rango de 0 ≤ I ≤ Ifs.
Figura 57 Resistencia equivalente del movimiento de d’Arsonval
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 114
Vista desde las terminales, un medidor de D’Arsonval en estado estable es equivalente
a la resistencia Rm de la figura 57 Esta resistencia representa el hecho de que el
movimiento señala potencia desde la fuente que suministra una corriente I. De la
misma manera la terminal de voltaje a deflexión a full escala es:
Vfi = RmIfi
87
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Las características de un medidor dado son especificadas por dos o tres parámetros
Ifi, Rm
y Vfi. Los medidores de baja corriente son llamadas a tener una gran
sensibilidad porque la deflexión de máxima escala requiere una corriente baja.
Con la ayuda de resistores adicionales e interruptores, el medidor de D’Arsonval puede
medir directamente corriente o voltaje dc en varios rangos. En particular, un
voltímetro
de dc multi-rango
consiste
de un medidor
y resistores
en serie
intercambiables. La figura 58 muestra el arreglo circuital para tener dos rangos
de voltaje para mediciones de voltajes desconocidos Vu. El voltaje V a través del
medidor es producido por un divisor de voltaje consistente de Rm y ya sea R1
o R2. En consecuencia, los resistores de selección de rango R1 y R2 son conocidos
como multiplicadores.
Figura 58 Arreglo circuital para tener dos rangos de voltaje
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 114
Al analizar la figura 58 tomando el interruptor en una posición, lo cual coloca a
R1 en serie con Rm. Entonces V = RmVu/(Rm + R1) así que Vu = (Rm + R1)V/Rm y la
deflexión a máxima escala corresponde a
Vufi = (1+ R1/Rm) Vfi
88
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Remplazando R1 en la anterior ecuación por R2 se obtiene las relaciones de máxima
escala para la otra posición del interruptor. Por ejemplo si Vfi = 250mV, Rm = 5 kΩ, R1
= 15 kΩ, y R2 = 95 kΩ, entonces los dos voltajes a máxima escala son (1+15/5) x 250
mV = 1V y (1 + 95/5) x 250 mV = 5 V.
Figura 59 Amperimetro dc multirrango
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 115
Un amperímetro dc multirrango emplea un interruptor con resistencias en paralelo,
como se muestra en la figura 59. Las resistencias seleccionables son conocidas como
shunts porque ellas generan un puente de paso para poder conocer la corriente Iu a
través del medidor. Cuando se conecta la resistencia R1, la máxima deflexión de
escala corresponde a
Iufi = (1+Rm/Ra)Ifi
Figura 60 Voltimetro digital
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 116
89
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Un multimetro digital (DMM) se diferencia de un instrumento de D’Arsonval en que la
unidad sensible es un voltímetro electrónico digital (DVM). Además de proveer
una pantalla digital de fácil lectura, un DVM es mostrado en la figura 60a para
ilustrar como resistencias multiplicadoras son conectadas como un divisor de voltaje
a el DVM a la entrada para obtener N rangos de voltajes. La figura 60b muestra como
se conectan en paralelo al DVM resistencias de shunt para obtener N rangos de
corriente.
Ejemplo: Diseño de multimetros analógicos
Figura 61 Multimetro multirrango
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 116
Suponga que usted necesita construir un multimetro similar al de la figura 61 con
Vufs = 5V y Iufi = 30 mA empleando un medidor de D’Arsonval teniendo Vfi = 120
mV y Ifi = 200 uA. Se pretende realizar los cálculos para Rv y Ra como sigue.
Primero usted encuentra la resistencia del movimiento siendo:
Rm = Vfi/Ifi = 120 mV / 200 u A = 600Ω
Posteriormente se determina el valor del resistor multiplicador Ru. En donde:
1 + Rv / 600 = 5 V /120 mV → Rv = 24,400Ω
Finalmente usted puede determinar el valor de la resistencia de Shunt Ra:
1 + 600/Ra = 30 mA/200uA → Ra = 4,027Ω
90
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Óhmetros
En
contraste a los voltímetros y amperímetros, un óhmetro debe suministrar
corriente
a través del elemento
consecuencia,
ambos
óhmetros
cuya resistencia
analógicos
y
está siendo medida.
En
digitales contienen un batería y
alguna fuente constante.
Un óhmetro análogo simplificado
es mostrado en la figura 62a donde Ru es la
resistencia desconocida a ser medida y Vs provee la corriente de prueba censada
por el medidor de D’Arsonval. Los valores del resistor de rango Rr y la
Figura 62 Ohmetro análogo simplificado
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 120
Combinación en paralelo Ram = Ra║Rm es escogida para obtener una deflexión
de máxima escala cuando Ru = 0, así que:
Con Ru ≠ 0, el voltaje a través del movimiento se convierte en:
Ram
V=
Ru + Rr + Ram
Vs
=
Rr + Ram
Ru + Rr +
Ram
Vfi
La ecuación anterior muestra que V = 0.5 Vfi cuando Ru = Rr + Ram, donde si V = 0
entonces Ru = ∞ (terminales de circuito abierto). Sin embargo la escala óhmica no es
lineal.
91
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 62 b. ilustra la escala de un óhmetro análogo con Rr + Ram = 30
Ω. Vemos que es más fácil leer valores de resistencia que sean de alrededor de
la deflexión de media – escala y la legibilidad se deteriora cuando Ru es mucho menor
o mayor que Rr + Ram.
La mayoría de multimetros análogos incluyen circuitos de óhmetros
similares al de la figura 62a., pero con resistores de rango seleccionables para
suministrar múltiples rangos con diferentes valores de media escala.
100
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
UNIDAD 2: ANALISIS DE CIRCUITOS AC
CAPITULO 4: SISTEMÀTICA DE LOS METODOS DE ANALISIS
LECCIÓN 1: ANALISIS DE NODO
El análisis completo de un circuito resistivo requiere encontrar las variables de todas
las ramas. Cuando el circuito tiene gran cantidad de ramas la aplicación directa de las
leyes de Ohm y de Kirchhoff generalmente producen ecuaciones de un grupo
desordenado de ecuaciones simultáneas.
Por esto se incluyen métodos de análisis que involucran el concepto de voltaje de
nodo.
Voltaje de nodo
Para introducir este concepto la figura 63a nos muestra un circuito típico con una
configuración de cuatro nodos. El nodo inferior es marcado con el símbolo de tierra.
Para indicar que este ha sido seleccionado como nodo de referencia. La ubicación
del nodo de referencia es arbitraria.
Figura 63. Circuitos resistivos con voltajes de nodo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 133
101
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Los voltajes v1, v2 y v3 en la figura 63a son llamados voltajes de nodo porque
estos son iguales
a las diferencias
de potencial
entre los otros nodos y la
referencia. En general los voltajes de nodo de un circuito son los potenciales de los
nodos que no son de referencia, con respecto al nodo especificado de referencia.
Teniéndose escogido y marcado la referencia, en lo sucesivo omitimos la polaridad de
los voltajes de nodo y se marcan directamente los nodos que no son de referencia
con voltajes de nodo. Como se muestra en la figura 63 b.
También se identifican
los voltajes de los nodos que no son referencia por los subíndices de los voltajes de
nodo, así que el nodo 1 es asociado con el voltaje v1, el nodo 2 con v2, etc.
Las marcas de polaridad puede ser necesarias para otros voltajes tales como v13
en la figura 63b. La notación empleando doble subíndice refleja el hecho de que v13 es
expresado en términos de v1 y v3, la aplicación de la KVL implica que v1 – v13 – v2 = 0,
así que v13 = v1 – v3. De hecho, cualquier voltaje que aparezca entre dos nodos que no
son de referencia se pueden escribir como:
vnm = vn – vm
Donde vn y vm son los voltajes de los nodos n y m respectivamente
Hemos visto entonces como todos los voltajes de rama en un circuito, son cualquier
voltaje de nodo o la diferencia entre dos voltajes de nodo. Además, todas las
corrientes desconocidas de rama en un circuito resistivo pueden encontrarse de los
voltajes de rama empleando la ley de Ohm
Por ejemplo la resistencia Ra conectada al nodo 1 y al nodo de referencia pueden
expresarse la corriente que circula a través de esta como
ia = v1/Ra = Gav1
Donde Ga = 1/Ra. De manera similar si se conecta Ra del nodo 1 directamente al nodo
3, la corriente que va desde el nodo 1 al nodo 3 a través de la resistencia es:
ib = v13/Rb = Gb (v1 - v3)
102
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Usualmente se escriben estas expresiones con conductancias, aun cuando el diagrama
siempre este marcado con resistencias.
Podemos
decir entonces que todas las variable de rama en un circuito pueden ser
determinadas de los valores de los voltajes de nodo.
Figura 64 Circuitos con nodos de voltaje
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 134
Como una ilustración de la propiedad, consideremos el circuito de la figura 64a. El
único nodo desconocido es el nodo de v1, ya que la conexión de la fuente de voltaje a la
referencia del nodo 2 fuerza a v2 = -v3. Si nosotros conocemos el valor de v1,
entonces nosotros calculamos las corrientes de la rama mediante:
Ia =Gav1
ib= Gb(v1-v2) = Gb(v1+vs)
El camino más conveniente para encontrar v1 es mediante la suma algebraica de
lãs corriente que llegan al nodo 1. De acuedo a esto escribimos:
ia+ ib – is = 0
O en términos de v1
Ga v1 + Gb (v1 + vs) - is = 0
Reorganizando entonces la ecuación de nodo: (Ga + Gb) v1 = is – Gbvs
Esta expresión puede ser resuelta para v1.
103
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Al comparar la ecuación anterior con el diagrama del circuito, observamos que la
cantidad Ga + Gb sobre el lado de la izquierda es igual a al suma de las conductancias
concectadas al nodo 1. La cantidad is – Gbvs sobre la derecha tiene también una
interpretación física, nominalmente, la red equivalente de corriente sobre el nodo 1.
Nosotros justificamos que la interpretación para convertir la fuente de voltaje con
resistencias en serie dentro de una fuente de corriente con resistencias en paralelo,
como se muestra en la figura 64b. Este diagrama claramente revela que la fuente
equivalente de corriente Gbvs deja el nodo 1, y asi la corriente de la red en el nodo 1
es is - Gbvs.
Si consideramos cualquier circuito con
un voltaje de nodo desconocido v1. La
ecuación de nodo para v1 toma la forma general.
G11v1 = is1
Donde G11 = suma de conductancia conectadas al nodo 1. Is1 = corriente equivalente
de red en el nodo 1
Esta interpretación permite escribir las ecuaciones de nodo fácilmente por inspección
del diagrama del circuito. La única restricción sobre la técnica de inspección es que
cualquier fuente de voltaje debe tener una terminal al nodo de referencia asi que pueda
determinar la fuente de corriente correspondiente.
Ejemplo: Análisis de Nodo
El circuito de la figura 65 es analizado usando la ecuación de nodo. En particular, se
necesita conocer las tres corrientes indicadas de rama.
104
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 65 Análisis de nodo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 135
Tomando como referencia
el nodo del punto, v1 es solamente
el voltaje
desconocido, por lo que los voltajes en las otras dos terminales son + 18 V y -60 V con
respecto a la referencia. Se toma el equivalente de las resistencias de 5 Ω y 7 Ω
la
cual es de 12 Ω. Por tanto la suma de las conductancias conectadas al nodo 1 es:
G11 = 1/6 + 1/(5+7) + ¼ = 6/12 = ½ S
Siguiendo a esto observe que la fuente de 18 V se encuentra en serie con
6 Ω y la fuente de 60 V es serie con 4 Ω las cuales pueden ser convertidas en fuente
de corriente, al realizar las conversiones,
nosotros concluimos con la fuente de
corriente de red, la corriente equivalente que entra en el nodo 1 es:
Is1 = 18/6 + -60/4 = -12 A
Asi obtenemos la ecuación de nodo
½ v1 = -12 → v1 = - 24 V
El valor negativo de v1 significa que el nodo 1 tiene un potencial menor que el nodo de
referencia.
105
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Finalmente, nosotros usamos v1 para calcular la corriente de rama mediante
Ia = 18 – v1/6 = 7 A ib = v1/ (5+7) = - 2 A ic = v1 – (-60)/4 = 9 A Estos valores
satisfacen la KCL donde ia = ib + ic
Fuente flotante de voltaje
Consideremos cualquier circuito que contenga dos o más fuentes de voltaje fuera
de la terminal común. Si la referencia del nodo es tomada a una terminal de una
fuente, entonces las otras fuentes carecen de conexiones directas a la referencia y
estas son llamadas a ser flotantes. El análisis de nodo con fuentes flotantes requiere
consideraciones extra.
Fuentes flotantes con resistencia en serie: La figura 66a muestra una fuente de
voltaje con resistencia en serie conectada entre dos nodos que no son de referencia,
n y m. El nodo intervenido marcado como X, puede ser ignorado porque el voltaje en
X es vx = vn + vs y tenemos que vx puede ser conocida inmediatamente
Figura 66 Fuente de voltaje flotante
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 144
Después de encontrar vn. Nosotros tenemos la libertad para realizar conversión de
fuentes. Obteniendo la estructura en paralelo de la figura
66b. Esta figura revela que la fuente equivalente de corriente vs/Rs va del nodo n
entrando
en el nodo m. Adicionalmente,
conductancia 1/Rs afecta ambos nodo.
106
nosotros
vemos que el efecto de la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Cuando un circuito incluye una fuente flotante similar a la figura 66b. usted puede llevar
a cabo el análisis de nodo por inspección después de redibujar el diagrama como
la figura 66b. Pero teniendo en cuenta que la conversión de fuente es equivalente
solamente en la terminal de los nodos n y m. Asi para encontrar la corriente actual de
rama a través de Rs, debe de calcularse esta de la configuración original de la figura
66a usando los valores de vm y vx = vn
+ vs. Manteniendo también en mente
que la buena selección del nodo de referencia elimina innecesarias conversiones de
fuente. Hay que recordar que las fuentes de voltaje flotante con resistencias en serie
pueden ser convertidas en fuentes equivalentes de corriente.
107
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 2: ANALISIS DE MALLA
Este método es el dual del análisis de nodo. Para algunos circuitos, el uso de
corrientes de malla es mejor que los voltajes de nodo ya que optimiza el número de
variables desconocidas. Y aun cuando el numero de corriente de malla desconocidas
es igual que el numero de voltajes desconocidos, la corrientes de malla pueden ser
las variables más apropiadas en ciertos problemas
Corrientes de malla
El análisis de malla es restringido a la categoría llamada circuitos planos. La
definición de esta categoría es que el diagrama de circuito plano puede ser dibujado
sobre un plano sin tener “saltos por encima “de los lazos del circuito.
La figura 67a ilustra un circuito no plano, en contraste la figura 67b muestra un circuito
plano, sencillamente el circuito se puede redibujar sin tener saltos encima. Los
circuitos más prácticos satisfacen la condición de ser planos, así que la restricción del
análisis de malla no es crítica.
Figura 67 Circuito no plano y plano
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 149
La ausencia de ramas cruzadas asegura que cualquier circuito plano consiste de
un número único de mallas, definiendo la propiedad de que una malla es un cruce
cerrado de corriente que no contiene caminos cerrados dentro de esta.
108
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
En otras palabras, cada malla constituya el borde de una “agujero” o
“marco de ventana” en un diagrama de circuito.
La figura 68a muestra la configuración de un circuito con tres mallas y tres corrientes
marcadas como i1, i2 y i3. Todas estas corrientes van a través del perímetro de una
rama de una de las mallas.
Pero las tres ramas interiores están marcadas
diferentes porque ellas forman la frontera entre dos ramas. De la KCL, las correntes a
través de estas ramas interiores con
i12 = i1 – i2, i23 = i2 – i3, y i13 = i1 – i3 = i12 + i13.
Figura 68 Circuitos con mallas
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 150
De manera alternativa se puede dibujar las tres corrientes como se muestra en la
figura 68b. Aquí se observa que i1, i2 y i3
se pueden calcular completamente
alrededor de sus respectivas mallas. Podemos decir que i1, i2 y i3 son corrientes
de malla. En general las corrientes de malla de un circuito son las corrientes que
circulan completamente alrededor de cada una de las mallas.
Se deben definir los números de mallas de un circuito de acuerdo al número
corrientes de malla. También se puede adoptar la convención de referencia tal que
todas las corrientes de malla desconocidas circulan en el mismo sentido de rotación, ya
sea en el sentido de las manecillas del reloj o en el sentido opuesto.
109
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Después de escoger la referencia de rotación de manera arbitraria, de manera
consistente se debe usar esta convención siempre para escribir al interior las corrientes
de rama de la forma:
inm = in - im
Donde in y im son las corrientes desconocidas a través de las mallas n y m,
respectivamente.
Todas las corrientes de malla cualesquiera son una corriente de malla o consisten
de dos corrientes de malla, cualquier voltaje de rama puede ser encontrado de las
corrientes de malla. En la figura 68 b por ejemplo, empleando la ley de Ohm;
va = -Ra i1 vb = Rbi13 = Rb (i1 – i3)
Así podemos concluir que todas las variables de rama en un circuito pueden ser
determinadas de los valores de malla de corriente.
Por lo tanto las corrientes de malla son otra forma de realizar un análisis completo de
cualquier circuito plano
Figura 69 Circuito con corriente de malla
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 151
110
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Para ser más específicos considerando el circuito de la figura 69a . Tiene dos mallas,
pero is es una fuente de corriente y i1 es la única corriente de malla desconocida. El
camino más conveniente para encontrar i1 es seguir la dirección de i1 y sumar
algebraicamente las caídas de voltaje alrededor de la malla 1. Entonces obtenemos:
Ra (i1 - is) + Rbi1 - vs = 0
Reordenando esta ecuación la ecuación de malla.
(Ra + Rb) i1 = vs + Rais
En esta expresión se puede despejar i1 para encontrar su valor. Si comparamos esta
ecuación con el diagrama del circuito, vemos que la cantidad Ra + Rb a la
izquierda es igual a la suma de resistencias alrededor de la malla 1. La cantidad
vs + Rais al lado derecho de la ecuación tiene una interpretación física, llamada, el
voltaje de fuente equivalente conducido por i1. Esta interpretación se justifica en
convertir la fuente de corriente con una resistencia en paralelo con una fuente de
voltaje con resistencias en serie como se muestra en la figura 69b
Matriz de ecuaciones de malla
Cuando un circuito contiene más que una corriente de malla desconocida, el método
de matrices puede ser usado.
Figura 70 Circuito con tres corrientes de malla desconocidas
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 152
111
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Como ejemplo el circuito de la figura 70 tiene cuatro mallas y una fuente de corriente.
Las corrientes de malla desconocidas son i1, i2 y i3 y las flechas de sus referencias
están dibujadas con el mismo sentido de las manecillas del reloj. Las flechas de las
corrientes de malla automáticamente satisfacen la KCL, y cualquier voltaje de rama
puede ser expresado en términos de corrientes de malla por medio de la ley de Ohm,
así que el uso de KVL permite obtener tres ecuaciones independientes.
Siguiendo la dirección de i1 para sumar las caídas de voltaje alrededor de la malla 1,
obtenemos:
Ra (i1 – is) + Rbi1 + Rc (i1 – i2) – vs = 0
Todos los términos que involucran i1 aparecen como suma de cantidades positivas, y
el número de términos a la izquierda de la ecuación es igual al número de ramas
alrededor de la malla 1. Para la segunda ecuación, se suman las tres caídas de voltaje
alrededor de la malla 2 para obtener.
Rc (i2 – i1) + Rdi2 + Rc(i2 – i3) = 0
Todos los términos que incluyen i2 son cantidades positivas. De igual manera
para la malla 3
Rc(i3 – i2) + Rfi3 + vs = 0
Finalmente las tres ecuaciones obtenidas se agrupan en una matriz de ecuaciones
de malla
Ra + Rb + Rc
− Rc
0
i1
− Rc
Rc + Rd + Re
− Re
i2
0
− Re
=
Re+ Rf i3
Rais + vs
0
− vs
La cual puede ser resuelta para i1, i2 y i3.
Si consideramos
desconocidas
corrientes
cualquier
y contiene
circuito
plano que tiene N corrientes
solamente
de malla desconocidas
resistores
y fuentes
pueden ser encontradas
ecuaciones en general de la forma
112
de malla
independientes. Las
de una matriz de
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
[R] [i] = [vs]
Los vectores [i] y [vs] consitituyen un arreglo de N x 1 columnas
Donde
in = corriente desconocida alrededor de la malla n vsn = fuente equivalente de voltaje
conduciendo in
Los elementos del vector equivalente de fuente
- voltaje puede ser positivos,
negativos o cero, dependiendo de la configuración del circuito.
La matriz de resistencia [R] en la ecuación anterior establece un arreglo de
NxN
R11
[R] =
−
R21
− RN1
−
R12...
R22..
.
− RN
2...
− R1N
− R2 N
RNN
113
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde Rnn = suma de resistencias alrededor de la malla n
Rnm = Rmn = resistencia equivalente compartida por las mallas n y m
Con la ayuda del la interpretación de la matriz de resistencia y del vector de fuente
– voltaje, nosotros podemos
determinar
directamente
por inspección los valores
de los elementos de un circuito. Así el método se puede resumir:
1. Identifique cualquier corriente de malla conocida fijada por fuente de corriente,
seleccione la dirección de referencia de rotación, y marque las corrientes de mallas
que permanecen desconocidas. También marque todas las otras variables de interés.
2. Llene la matriz de resistencias [R] usando las propiedades de que Rnn es igual a la
suma de resistencias alrededor de la malla n y Rnm es igual a la resistencia compartida
por las mallas n y m.
3. Revise [R] para estar seguro que Rmn
= Rnm y que los elementos de la diagonal
tienen un signo negativo. También revise que cada cantidad de la diagonal Rnm
aparecen con parte de los términos de la diagonal Rnn en la misma fila y
Rmm en la
misma columna.
4. Llene el vector de fuente de voltaje [vs] usando la propiedad de que vsn es igual a la
fuente de voltaje equivalente conduciendo la corriente in. Si la resistencia de malla
Rs también conduce corriente +/-is fija una corriente de fuente, entonces incluya la
fuente de voltaje equivalente +/- Rsis.
5. Resuelva la matriz de ecuaciones resultante {R] [i] = [vs] para las corrientes de malla
desconocidas.
Todas las otras variables de interés
pueden ser calculadas de las corrientes
de malla.
Desde que las fuentes de corriente establezcan las corrientes de malla conocidas,
las fuentes de voltaje no tienen efecto sobre las variables desconocidas.
114
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ejemplo: Análisis de malla con matrices y 2 incógnitas.
Nuestras incógnitas son el valor de i1 y i2. Solo tenernos dos corrientes de mallas
desconocidas puesto que si combinamos dos resistores en paralelo y suprimimos
todas las fuentes, entonces obtenemos un modelo con dos mallas como el de la figura
71.a.
Figura 71. Ejemplo de aplicación de análisis de malla
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 154
Paso 1: El diagrama de la figura 71.a, ha sido marcado con el valor de corriente de
malla conocido 1 A, y el sentido de rotación de las manecillas del reloj ha sido
seleccionado para i1 y i2.
Paso 2: Note que 60║12 = 10 Ω, por inspección del diagrama da la matriz de
resistencia:
[R] =
6+
15
− 15
−
21
15
=
15 + 60 || 12 +
−
5
15
− 15
30
Paso 3: Nuestra matriz de resistencias tiene las propiedades esperadas, y el termino
de la diagonal 15 Ω aparece como parte de R11 y R22 sobre la diagonal principal.
115
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Paso 4: Para los elementos de [vs], note que la fuente de 30 V maneja i1, mientras i2
es opuesta por la fuente de 50 V y por la fuente de voltaje (60║12)Ω x 1 A. Así
que
Paso 5: La matriz de malla resultante es
21
− 15
i1
− 15
30
i2
30
=
− 60
La cual es fácilmente resuelta para obtener i1 = 0
i2 = - 2 A
La potencia suministrada por la fuente de 50 v es 50 x (- i2) = 100W, mientras la
fuente de 30 V no suministra potencia, porque 30 x i1 = 0. Finalmente se calcula el
voltaje de rama.
va = (60║12) (1 + i2) = -10 V
Así la potencia suministrada por la fuente de 1 A es va x 1 = -10 W.
106
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCION 3: ANALISIS SISTEMÁTICO CON FUENTES CONTROLADAS
Analisis de malla
El circuito de la figura 72 muestra un circuito con fuentes controladas el cual se va
a analizar mediante el método de mallas. Hay solamente una corriente desconocida
aquí, y la ecuación de malla para i1 es:
(Ra + Rb)i1 = Rais – µva
Figura 72 Circuito con fuentes controladas
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 163
Pero la variable de control va es también desconocida, asi que es necesaria otra
ecuación que relacione va y i1. El examinar el diagrama nos muestra que:
va = Ra (is – i1)
Las dos ecuaciones anteriores constituyen un grupo de ecuaciones simultáneas con dos
variables desconocidas i1 y va. Se conoce la ultima ecuación como ecuación limitada
porque esta expresa la variable de control en términos de constantes conocidas y la
corriente de malla desconocida.
Si usted necesita solamente encontrar i1, entonces se sustituye dentro de la ecuación
limitada para obtener la ecuación de malla.
107
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
(Ra + Rb) i1 = R1is – µRa(is – i1)
= (1 – µ)Rais + µRai1
Podemos reescribir esta expresión de la forma: R11i1 = vs’ + R’i1
Donde R11 = Ra + Rb y
R’ = µRa
v’s = (1-µ)Rais
La comilla (’) identifica las cantidades afectadas por la fuente controlada, podemos
reagrupar estos términos como:
(R11 – R’) i1 = v’s
Esta se puede resolver para i1.
Ahora consideremos
cualquier circuito plano que tiene dos o mas corrientes de
malla desconocidas e incluyen como mínimo uma fuente controlada. Se comienza el
analisis escribiendo la matriz de ecuaciones de malla:
[R] [i] = [vs]
Sin embargo, las variables de control pueden aparecer como variables desconocidas en
el vector de fuente - voltaje, asi que se debe formular la ecuación limitada para todas
las variables de control e insertar entonces
[vs]. El vector de voltaje resultante entonces toma la forma general:
[vs] =
vs 1 + R 11 + R 12 + ...
i2
108
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
vs 2 + R 21 + R 22 i 2 + ...
Donde v`s y R`s son constantes.
Resolviendo las ecuaciones de la matriz de malla se requiere separar fuera de la
última ecuación aquellos términos que
involucran las corrientes
de malla
desconocidas. Para finalizar se expande [vs] como un vector de constantes más el
producto de una matriz – vector, esto es:
Simbolicamente se tiene
[vs] = [v’s] + [R’] [i]
Donde [v’s] incluye todas las fuentes independientes y [R’] [i] son las cantidades de la
corrientes de malla en la ecuación limitada. Aunque los elementos
las
unidades
de
resistencia,
la
de
[R’]
tienen
matriz generalmente difiere de la matriz de
resistencia [R’] y no necesariamente posee cualquier simetría.
Despues de la expansión de que [vs] es llevada a cabo, la ecuación de matriz de la
malla se convierte en:
[R] [i] = [v’s] + [R’][i]
Reagrupando los términos finalmente obtenemos la ecuación de malla modificada:
[R - R’] [i] = [v’s]
Donde [R - R’] = [R] - [R’]
Observe que la matriz [R -
R’] es obtenida por sustracción de los elementos de
[R’] de los elementos correspondientes de [R]. Esto significa que no debemos esperar
que [R – R’] tenga simetría cerca de la diagonal principal.
Para resumir, un procedimiento sistematico para análisis de malla con fuentes
controladas consiste de los siguientes pasos:
1. Identificar las corrientes de malla desconocidas y escribir la matriz de resistencia [R] por
inspección.
110
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
2. Para cada fuente controlada, se formula una ecuación limitada expresando la variable
de control en términos de las constantes conocidas y / o las corrientes de malla
desconocidas.
3. Escriba el vector de fuente – voltaje por inspección , incluya la ecuación limitada, y
expanda [vs] en la siguiente forma
[vs] = [v’s] + [R’] [i]
4. Calcule [R – R’], y resuelva par todas las corrientes de malla desconocidas de :
[R – R’] [i] = [vs’]
El siguiente ejemplo ilustra el procedimiento.
Ejemplo: Analisis de malla con CCCS
El circuito de la figura 73 tiene dos corrientes de malla desconocidas y una fuente de
corriente controlada. Seguiremos los pasos sugeridos para evaluar i1 y i2.
Figura 73 Analisis de malla para el circuito
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 165
Paso 1: Por inspección del diagrama, encontramos la matriz de resistencia:
[R] =
10 +
−4
4
−4
4+7+
3
=
14
−
−4
14
4
111
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Paso 2: La ecuación limitada relacionando i1 a las corrientes de malla es: Ia = i1 – i2
Paso 2: Ahora escribimos el vector de la fuente de voltaje e insertamos la
ecuación a obtener.
6
[vs] =
− 3x8ia
=
6
− 24i1 + 24i2
La expansión nos lleva a:
6
0
[vs] =
+
0
− 24i1 +
24i2
+
6
0
=
−
24
0
112
0
i1
24
i2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
0
0
Asi que:
[R ]
6
[vs] =
0
=
−
24
24
Paso 4: Ahora calculamos
14 −
0
[R − R ] =
− 4 − (−24)
−4−0
=
14 −
24
−4
14
− 10
20
Lo cual no exhibe cualquier simetría. La matriz de ecuaciones de malla modificada
finalmente se convierte en:
14
−4
i1
20
− 10
i2
6
=
0
De lo cual i1 = 1A y i2 = 2A
Análisis de nodo
Al considerar cualquier circuito que tenga al menos una fuente controlada. El
procedimiento
sistematico para análisis de nodo se inicia con la matriz de
conductancias [G] y el vector de fuente de corriente [i]. Sencillamente todas las
variables de control aparecen en [is], se debe escribir la ecuación limitada de cada
fuente controlada que relacione la variable de control de los voltajes de nodo.
Despues de la inserción de las ecuaciones limintadas, [is] puede ser nominalmente:
113
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
[is ]is1=+ G11v1 + G12v2 + ...
is2 + G 21v1 + G22v2 + ...
Donde i’s y G’s son constantes. Se puede expandir [is] como
114
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
is1
[is ] =
is
G
11
G1
2
...
v1
...
v2
G21
G2
2
..
.
.
+
2
.
..
Asi que
[is] = [i’s] + [G’] [v]
La ecuación de matriz de nodo ahora se vuelve [G] [v] = [i’s] + [G’] [v]. Por lo tanto los
voltajes de nodo pueden ser encontrados de [G – G’} [v] = [is’], donde [G – G’] = [G] –
[G`].
Un procedimiento
sistematico
para el análisis de nodo con fuentes controlas
consiste en los siguientes pasos:
Identificar los voltajes de nodo y escribir la matriz de conductancia [G] por inspección.
Para cada fuente controlada,
formular
una ecuación
limitada expresando las
variables de control en términos de constantes conocidas y
/o de voltajes de nodo desconocidos. Escriba el vector de fuentes de corrientes por
inspección, incluya las ecuaciones limitadas, y expanda [is] en la forma:
[is] = [is’] + [G’] [v]
Calcule [G – G’], y resuelva los voltajes de nodo desconocidos de
[G – G’] [v] = [is’]
Como en el caso del análisis de malla, no podemos esperar que [G – G’]
tenga simetría cerca de la diagonal principal.
115
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ejemplo: Análisis de nodo con un amplificador inversor
La figura 74 es el circuito equivalente de un amplificador inversor construido
con un amp – op. El circuito puede tener vout/vin = -RF/R1 = - 50 si el amp – op es
ideal (ri = ∞, ro = 0, y A = ∞). Pero aquí empleamos el análisis de nodo para encontrar
vout/vin tomando la entrada del amp – op y las resistencias de entrada y salida ri y ro
y una ganancia finita A.
Los voltajes de nodo desconocidos son v1 = -vd y v2 = vout, marcados como en el
diagrama. La matriz de conductancia correspondiente en milisiemenes es:
Figura 74 Analisis de nodo de un amplificador operacional
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 168
1
[G ] =
1
1
+
+
2 100 20
0
1
−
100
1
+
100
−1
010
1=
0.515
1
+
0.5 1
−
0.01
− 0.01
3.01
La ecuación limitada para vd es vd = -v1
Asi que el vector de fuente de corriente en miliamperios es
116
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
vin / 2
[is ] =
A(−v1) / 0.5
=
0.5vin
0
0
v1
+
− 2A
0
0
117
v2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Sustrayendo [G’] de [G] se obtiene la matriz modificada
0.515
− 0.01
v1
2 A − 0.01
3.01
v2
0.5vin
=
0
Ambos A y vin son valores arbitrarios, nosotros resolvemos para v2 por aplicación
de la regla de Crammer’s para obtener el determinante
∆ =
1.55 + 0.02 A
∆2 = (0.05 - A)vin
Asi que vout = v2 = ∆2/∆ .
La
siguiente tabla mustra la lista de valores vout/vin para valores seleccionados de
ganancia del amp – op. Nosotros vemos de estos resultados que vout/vin ≈ - 50
cuando A ≥ 104 , asi que el funcionamiento del circuito básicamente es el de un
amplificador operacional ideal.
A
vout/vin
102
103
-
28.15
104
-
46.40
118
105
-
49.2
49.96
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 4: APLICACIONES DEL ANALISIS SISTEMATICO
Resistencia equivalente
Para ilustrar el método se toma como referencia la figura 75 donde una red con una
carga arbitraria está conectada a una fuente de prueba que establece v o i a las
Figura 75 Fuente de prueba conectada a una red de carga
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 170
Terminales. Nosotros conocemos que la variables en las terminales son
relacionadas por v= Reqi, esto es
Req = v/i
Por tanto, la resistencia equivalente Req puede ser calculada encontrando v en
términos de i o i en términos de v.
119
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La fuente de prueba puede ser cualquiera, una fuente de voltaje o una fuente de
corriente, y nosotros tenemos la opción de usar ya sea análisis de nodo o de malla.
De acuerdo con esto se escoge la combinación de fuente de prueba y el método
de análisis que dirige más fácilmente la deseada relación entre v e i para
obtener
una
red.
Esto
usualmente significa que nosotros podemos minimizar el
número de variables desconocidas simultáneas.
Ejemplo: Resistencia equivalente de un puente resistivo
La figura 76a muestra un puente resistivo. Aunque esta red consiste enteramente de
resistores, esta no tiene la estructura que permita una reducción serie – paralelo.
Supongamos que asumimos una fuente de voltaje de prueba y dibujemos el circuito
de la figura 76b. Por lo tanto necesitamos encontrar la corriente resultante equivalente
i, el método de análisis de malla aparece como la mejor opción. Pero el
Figura 76 Puente resistivo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 171
120
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Método de mallas puede involucrar tres corrientes desconocidas, donde hay solo
dos voltajes de nodo desconocidos y podemos fácilmente
encontrar i de v1 y v2. Retomando el análisis de nodo, se tiene que:
1
+
12
1
4
−
+
1
−1
3
4
v1
1
1
4
8
+
1
4
2
1
+2
v
=
v
12
v
8
121
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Lo cual lleva a que v1 = v2 = v/5. La KCL a el nodo de referencia nos muestra que
i = v1/3 + v2/2 = v/15 + v/10 = v/6
Por tanto Req = v/i = 6Ω
Alternativamente, nosotros podemos asumir una corriente de prueba como se muestra
en la figura 76c. Ahora el análisis de nodo para v nos involucra tres voltajes
desconocidos, donde hay solamente dos corrientes de malla desconocidas y nosotros
fácilmente encontramos v de i1 y i2. La matriz de
ecuación de malla es:
12 + 8 + 4
−4
i1
−4
3+ 4+ 2
i2
12i
=
3i
De lo cual i1 = i2 = 3i/5 La ley de KVL alrededor de la malla exterior entonces
nos muestra:
V = 9i1 + 2i2 =
24i
+
5
6i
= 6i
5
Por tanto Req = v/i = 6Ω.
Para esta red en particular, cualquier análisis de nodo o malla requiere un minimo de
dos variables desconocidas, suponiendo que escogimos la apropiada fuente de prueba.
Parametros Thevenin
Si la red bajo consideración tiene una estructura complicada, entonces el análisis de
nodo o malla puede ser usada para encontrar el voltaje de circuito abierto voc o
la corriente de corto circuito. El análisis sistemático pude también ser usado para
encontrar la resistencia Thevenin Rt, la cual es la resistencia equivalente de la red
muerta. Necesitamos entonces caulquiera de estos tres parámetros, sencillamente
relacionados por voc = Rtisc.
122
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El enfoque aplicado requiere analizar dos configuraciones diferentes de circuito.
Un
enfoque
parámetros
indirecto
Thevenin
llamado
del
el método
análisis
de
de un paso
solamente
implica obtener
los
una configuración de circuito.
Este método involucra una corriente externa o una fuente de voltaje conectada a la
terminal de la fuente de la red.
Figura 77 Modelo Thevenin de una fuente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 173
La figura 77a muestra el modelo Thevenin de una fuente arbitraria de red, y una fuente
externa de corriente teniendo conectado y establecido en la terminal la corriente i. El
voltaje resultante en la terminal puede ser:
v = voc- Rti
Asi que voc y Rt puede encontrarse usando el análisis de nodo para obtener la
expresión para v en términos de i.
La situación dual mostrada en la figura 73b emplea el modelo de Norton con una
fuente de voltaje externa estableciendo el voltaje terminal v. La terminal resultante
de corriente puede ser
i = isc – v/Rt
Asi que isc y Rt puede ser encontrado por uso de método de mallas obteniendo una
expresión en términos de v.
120
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
EJEMPLO: PARAMETROS THEVENIN DE UN AMPLIFICADOR DE CORRIENTE
La figura 78a es el modelo de un circuito de una amplificador de corriente. Nosotros
necesitamos encontrar los parámetros Thevenin mirando las terminales de salida. El
análisis de nodo con una fuente externa de corriente
puede involucrar tres
voltajes desconocidos, mientras que el análisis de malla con una fuente de voltaje
involucra dos corrientes desconocidas.
Redibujando el circuito como se muestra en la figura 78b y aplicando inspección
sistemática obtenemos:
Figura 78: Parametro Thevenin de un amplificador de corriente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 173
121
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
−
[R ] =
21
ix = iin - i1
37
−
3
8iin − 10 x2i x
[vs] =
=
−
12iin
−v
+
−v
0
20
0
0
i1
i
Asi que:
1
−3
−3
i1
7
i
=
− 12iin
−v
Resolviendo para i en términos de iin y obteniendo v :
i=
− v − 36iin
= 18iin −2 −2
v
Por tanto por comparación con la ecuación isc = 18iin
Rt = -2kΩ
El voltaje de salida de circuito abierto es entonces voc = Rtisc = -36 kΩ.
122
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 5: ANALISIS DE NODO CON AMPLIFICADORES OPERACIONALES
IDEALES
Recordemos que la salida de un amplificador operacional proviene de una fuente
controlada, esta se considera como una variable dependiente cuyo valor debe
satisfacer las condiciones del corto virtual. En consecuencia, una ecuación de nodo
no puede ser escrita a la salida de un amplificador operacional ideal. Por lo tanto el
procedimiento a seguir es el siguiente:
1. Marque los cortos virtuales a las entradas del amp – op, marque todos los voltajes de
nodo excepto aquellos que sean tierras virtuales, e identifique todos los voltajes de
nodo desconocidos diferentes a la salida del amp – op.
2. Escriba una ecuación de nodo para cada voltaje desconocido, tratando las salidas del
amp – op como fuentes de voltajes controladas.
3. En lugar de ecuaciones limitadas, escriba las relaciones de voltaje requeridas
para las condiciones de corto virtual.
4. Use las ecuaciones de nodo y las relaciones de corto virtual para resolver los voltajes
de interés.
Ejemplo: Circuito Inversor / no inversor con Amp – Op
Figura 79 Amplificador operacional no inversor/inversor
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 175
123
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El circuito de la figura 79 puede funcionar como un amplificador no inversor o inversor.
Necesitamos encontrar una expresión para vout / vin. Despues de
realimentación
negativa,
asumimos
que
observar
una
ambos amplificadores operacionales son
ideales; realizamos el procedimiento siguiendo los pasos:
Paso 1: Marcamos los cortos virtuales y observamos que la entrada a el segundo amp –
op es una tierra virtual. Entonces marcamos todos los otros voltajes como se muestra
en la figura, observe que v1 es el único voltaje de nodo desconocido que no es salida
de un amp – op.
Paso 2: El alambre que conecta v1 a la terminal del primer amp – op no lleva
corriente asi que se puede escribir la ecuación de nodo par el voltaje v1 como:
1
1
+
R2
K 2R2
+
vx
v1 =
R2
vout
K 2R2
Paso 3: La condición de corto virtual a la salida del primer amplificador operacional
requiere que
v1 = vin
La tierra virtual a la entrada del segundo amp – op requiere que vx/R1 +
vout/RF = 0, así que
vout = -(RF/Rs)vx = -K1vx
Esta expresión agrega el hecho de que el segundo amp – op es parte de un
configuración estándar de amplificador inversor.
Paso 4: Ahora se elimina v1 y vx de la ecuación de nodo sustituyendo v1 =
vin y vx = -vout/K1. Por lo tanto
1+
k2
1
vin =
−
vout
K1
2
+
vout
K
=
2
K1 − K
K1K 2
124
vout
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Lo cual no lleva a:
vout
=
vin
K1(k 2 + 1)
K1 − K 2
Este resultado nos confirma la propiedad interesante de que el circuito sirve como
un amplificador no inversor con vout / vin > 0 cuando K1 > K2, mientras tanto se
convierte en una amplificador inversor con vout/vin < 0 cuando K1< K2. También
podemos observar que K1 y K2 deben ser escogidos
con cuidado
porque
│vout/vin│→∞ cuando K2 = K1 y │vout│ pueden ser muy grandes cuando K2≈K1.
125
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCION 6: TRANSFORMACIONES DELTA – ESTRELLA
Este tipo de procedimiento aplica a redes resistivas que tienen tres terminales
externas. Estas redes juegan un mejor rol en muchos sistemas ac de potencia, y
estas también aparecen en partes de otras redes, como por ejemplo puentes
resistivos. Podemos emplear análisis sistematico para derivar las expresiones para la
resistencia equivalente entre cualquier par de terminales en una red resistiva de tres
terminales. Estas expresiones entonces dirigen las transformaciones útiles.
Figura 80 Redes resistivas de tres terminales
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 177
Hay dos tipos básicos de configuraciones de redes resistivas de tres terminales, la
configuración Y, que se observa en la figura 80a;
muestra en la figura 80b
126
y la configuración delta que se
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 81 Redes T y pi
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 177
Para comenzar el análisis, se toma un punto de nodo como la referencia y se redibuja
cada red en una configuración de cuatro terminales con terminales pares. La nueva
estructura se convierte entonces en una red T, como se muestra en la figura 81,
mientras que la estructura delta se convierte en una red pi (Π),. Las fuentes externas
tambiene han sido conectadas a los pares de terminales para propósito de análisis.
Si las redes son equivalentes a
los pares de las terminales de
entrada y salida,
entonces la relaciones de entrada y salida de voltaje – corriente de la red R deben ser
las mismas relaciones de entrada y salida de corriente – voltaje de la red delta/pi.
Las ecuaciones de malla para la red T son fácilmente obtenidas por inspección:
127
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
RabRc
a
∑R
Ra =
Rb
=
RbcRa
b
∑R
Rc
=
RcaRbc
∑R
Donde ΣR = Rab + Rbc + Rca
Estas relaciones constituyen la transformación delta a estrella, mostrando que
red
delta
dada
actua
como
una
una
red
estrella;
una
cuyas resistencias son
convertidas mediante las expresiones anteriormente encontradas. Observe que la
resistencia estrella equivalente Ra es igual al producto de las dos resistencias delta
conectadas a el nodo
dividida por la suma de todas las resistencias delta. Una
interpretación similar aplica para Ra y Rc. Mediante
las conversiones
de las
ecuaciones anteriores, se puede encontrar que una red delta/pi pude ser equivalente
a las terminales de una red estrella/T con:
Rab = R2/Rc
Rbc =R2/Ra
Rca= R2/Rb
Donde: R2 = RaRb + RbRc + RcRa
Estas relaciones consituyen lãs transformaciones estrella a delta. Observe que la
resistencia equivalene delta Rab conecta los nodos a y b iguales a la suma de los
pares de los productos de las resistencias estrella dividida por la resistencia estrella
a el nodo opuesto. Similares interpretaciones aplican para Rbc y Rca.
Ejemplo: Transformación de un puente resistivo
La figura 82a muestra un puente resistivo al cual se pretende ver si se aplica
transformaciones estrella o delta. Las transformaciones estrella – delta o delta –
estrella puede reducir el puente a una estructura serie – paralelo. Entonces se
puede encontrar la resistencia equivalente resolviéndose ecuaciones de nodo o malla.
Como lo indican las etiquetas de la figura 82b se puede transformar una red estrella
como la de la izquierda en una red equivalente delta. Mediante el empleo de las
expresiones propuestas tenemos que:
128
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 82 Transformación de un puente resistivo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 179
R2 = RaRb + RbRc + RcRa = 96 Ω2
Asi lãs resistências delta son:
Rab = 96/4 = 24 Ω
Rbc = 96/3 = 32 Ω
Rca = 96/12 = 8 Ω
La red de transformación resultante es mostrada en la figura 82 c
Ahora podemos combinar la resistencias en paralelo Rbc║8 = 6.4 Ω
y
Rca ║2 = 1.6 Ω. El diagrama se reduce al de la figura 82d donde : Req = v/i =
24║(6.4 + 1.6) = 6 Ω
129
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CAPITULO 5: ALMACENAMIENTO DE ENERGIA Y CIRCUITOS DINÁMICOS
LECCIÓN 1: CAPACITANCIAS
Los capacitores almacenan energía de un campo eléctrico. El campo eléctrico es
creado por un desplazamiento de cargas positivas y negativas. En los circuitos
eléctricos los condensadores son usados para almacenar energía, para suministrar
energía para diversas aplicaciones.
Capacitancia y desplazamiento de corriente
La figura 83a nos muestra las partes esenciales de un capacitor. Este dispositivo
consiste de dos superficies metálicas o placas separadas por un dieléctrico. Idealmente,
el dieléctrico es un aislante perfecto, así que este previene el flujo de carga dentro del
capacitor. La conducción toma lugar por medio de la cicuiteria adjunta a las placas.
Cuando una fuente de voltaje es conectada a un capacitor, la fuente muestra el
camino para los electrones libres desde las placas al potencial mayor y deposita un
número igual de electrones adicionales en las placas de menor potencial. La figura
83b muestra la condición resultante, con la carga equivalente positiva +q sobre una
placa y el exceso de carga negativa –q sobre la otra. Algunas personas se refieren a
q como “carga almacenada”, incluso aunque la carga total sobre el capacitor sea
igual a cero. Para ser más exactos, se conoce a q como la carga desplazada
porque la fuente actualmente desplaza a q de la placa de menor potencial a la placa
de mayor potencial.
130
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 83 Capacitor
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 195
El desplazamiento de carga crea un campo eléctrico entre las placas, como se indica en
la figura 83b. Este campo tiene la energía suministrada por la fuente cuando son
movidas las cargas. Por tanto un capacitor almacena energía en un campo eléctrico
producido por el desplazamiento de carga sobre unas placas.
La teoría y la experimentación indican que q es proporcional a el voltaje instantáneo
v a través de un capacitor, asi se puede escribir que q = Cv. La constante C es llamada
la capacitancia, definida por
C = q/v
La capacitancia es medida en faradios (F), este nombre es en honor del Ingles
Michael Faraday (1791 – 1867). Un faradio equivale a
1 Columbio por voltio; 1
Columbio también es igual a 1 amperio – por segundo, asi que podemos expresar la
unidad de la capacitancia como
1 F = 1 A * s/V
La capacitancia de una estructura de placas paralelas es dada por la expresión:
C = εrεoA/d
131
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde A es el area de las placas, d es su espaciamiento, y εr es la constante
dieléctrica o permitividad relativa comparada con la permtividad del espacio libre. La
permitividad del espacio libre es expresada en términos de la velocidad de la luz c
como:
εo = 107/4Πc2 = 8.854 pF/m
En el espacio libre εr = 1, por definición, donde los dieléctricos tienen típicamente 2 < εr
<100.
Supongamos que se necesita construir un capacitor de 1F usando un dieléctrico
con
εr ≈ 10 y d=0.1 mm. De la expresión anterior se necesitaría un area de las
placas de A = Cd/εrεo
6
≈ 10
m
2
– mayor que 100 campos de futboll. En
consecuencia la valores mas practicos están en el rango de unos pocos cientos de
microfaradios (1µF = 10-6 F) o de unos pocos pico faradios (1 pF = 10-12F). Pequeñas
capacitancias
ocurren naturalmente cuando dos superficies conductoras
están
próximas, similar a los alambres en un cable. Este efecto es llamado capacitancia
parasita.
Ahora consideremos que ocurre si el voltaje a través del capacitor varia en el tiempo,
asi que q debe de la misma manera variar con el tiempo. El variar la carga sobre
cada placa
requiere una corriente i = dq/dt entrando en la terminal de mayor
potencial e igual a la corriente dejando la terminal de menor potenicial. La relación
resultante de corriente – voltaje se obtiene por diferenciación q = Cv, observe que C es
una contante. Asi que dq/dt = d(Cv)/dt = C dv / dt asi que se tiene que:
I = Cdv/dt
Se conoce a i como la corriente de desplazamiento, porque esta representa
la carga desplazada sobre las placas del capacitor mayor que la carga interna que
fluye a través de un dieléctrico. No obstante, las cargas que fluyen a través de un
alambre conductor tienen el mismo valor de i. Simplemente i entra a la terminal de
mayor potencial y sale de la terminal de menor potencial, el símbolo para el
condensador se muestra en la figura 84, incluyendo las marcas de polaridad que siguen
la convension usual pasiva. (Algunos textos simbolizan los capacitores con dos
132
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
placas paralelas).
i=C
dv
dt
Figura 84: Simbolo de un condensador
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 193
La última ecuación muestra el estado instanteneo de la corriente del capacitor la
cual es proporcional al valor de carga del voltaje. Pero si el voltaje permanece,
entonces dv/dt = 0 y la corriente es igual a cero. El voltaje constante corresponde a
un voltaje de fuente dc, asi que nosotros decimos que un capacitor actua como un
circuito dc abierto.
Cualquier fuente que cambie el voltaje a través del capacitor
debe suministrar
un corriente no cero i ≈ C dv/dt y una potencia instantánea:
p = vi = Cvdv/dt
La potencia no se obtiene disipada en calor sino en otras formas de energía,
porque un capacitor ideal contiene mecanismos para disipación de potencia. Por el
contrario, p representa la energía transferida desde una fuente al campo eléctrico de
un condensador. La energía transferida toma el valor de dw/dt = p, y se puede
reescribir la ultima ecuación como dw = p dt = Cv dv. Integrando esta expresión se
obtiene:
W = ∫ Cv dv = ½ Cv2 + Kint
133
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde Kint
es la constante de integración. Por lo tanto no hay campo eléctrico
para almacenar energía cuando v = 0, se tiene que Kint = 0. Por lo tanto el valor de
energía instantánea almacenada es:
W = 1/2Cv2
Por ejemplo un condensador con 1 µF con una fuente de 20 V almacena w
= ½ x 10-6 x 202 = 200 µJ.
Si se desconecta la fuente después de que se cargue un capacitor ideal a un voltaje
v, entonces nosotros encontramos que v = q/C a través del capacitor porque la
carga desplazada no deja las placas cuando i = 0. Además, el desplazamiento de
carga y la energía almacenada permanece dentro
indefinidamente
siempre
de
un
capacitor
ideal
y cuando las terminales no estén abiertas. La energía
puede ser recuperada un tiempo después conectando la carga al capacitor cargado,
permitiendo que las cargas dejen las placas y transfieran energía desde el campo a
la carga. Esta habilidad para almacenar y descargarse es aprovechada en lámparas
electrónicas, desfibriladores de corazón, y aplicaciones similares que requieren largas
ráfagas de energía. La energía es almacenda durante intervalos de tiempo entre
ráfagas.
Relaciones de voltaje – corriente
La relación i = Cdv/dt nos muestra como calcular la corriente de un capacitor
cuando nosotros conocemos el voltaje derivado dv/dt. A la inversa las relaciones v
– i envuelven integrales y no deben tomar cuidado cuando se evalúan las constantes de
integración. Por esta razón, podemos trabajar
intervalos de tiempo definidos.
134
con
integrales
definidas
sobre
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Nosotros también indicamos dependencia al tiempo al escribir i = i(t), v =
v(t), etc.
Suponga que comenzamos en algún tiempo inicial t0 cuando la carga desplazada
es q (t0). Si el capacitor conduce corriente i(t) = dq/dt, entonces
la carga después de un tiempo t0 + T puede ser:
to +T
∫ i(t )dt
q(to + T) = q(to) +
to
Retomando esta expresión para cualquier instante t > t0 + T, podemos dejar t = t0
+ T, y se introduce la variable de integración λ para evitar una
confusión con el nuevo limite superior t. Por tanto:
q(t) = q(to) +
t
∫ i(λ )dλ
t > t0
to
Donde la función i(λ) es idéntica a i (t) remplazando t con la variable de prueba λ.
Finalmente, de v(t) = q(t)/C, se obtiene :
t
1
∫Cto i(λ )dλ
v(t) = v(t0) +
t > t0
Esto resulta dando un voltaje instantáneo v(t) para t > t0 en términos del voltaje inicial
v(t0) y la corriente posterior.
nosotros dejamos t0 → ∞ y asumimos que v(-∞) = 0 ─ una
Alternativamente,
hipótesis razonable, por lo tanto cualquier capacitor puede no tener un voltaje inicial en
el tiempo que fue construido.
v(t) =
C −∞
1
t
∫ i(λ )dλ
135
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Esta expresión trae el hecho de que un capacitor posee una memoria eléctrica, y
el voltaje para cualquier tiempo t siendo dependiente sobre todo su
de la corriente.
Físicamente,
la memoria
comportamiento
de un capacitor se toma de la carga
resultante desplazada, liberada por i sobre todo tiempo previo. La ecuación anterior es
más adecuada para cálculos practicos porque el voltaje inicial v (t0) incorpora el efecto
de i para todo t < t0. En este caso, nosotros debemos conocer ya sea el voltaje inicial o
el comportamiento completo pasado de i para encontrar v (t).
Ejemplo: Amplificador operacional integrador
La figura 85 mestra un popular circuito, se emplea un amp – op con un capacitor
de realimentación.
Figura 85 Amplificador operacional integrador
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 200
La salida de voltaje como hemos visto esta dada por:
vout(t) = -vc(t) = C −∞
1
∫ ic(λ )dλ
t
136
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Asi el corto virtual de la entrada del amp – op requiere ic = iin = vin/R, asi
que
vout(t) = RC −∞
1
t
∫ vin(λ )dλ
Por tanto, este amplificador operacional integrador produce una salida de voltaje
proporcional
a la integral de la entrada de voltaje. Estos integradores son la
columna vertebral de un computador análogo.
Capacitancia en paralelo y serie
La capacitancia de una configuración en paralelo de capacitancia como en la figura
86. es:
Cpar = C1 + C2 + ….. + CN
Figura 86 Capacitores en paralelo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 201
Asi bancos de capacitancia se emplean para almacenar energía al conectarse
en paralelo.
137
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 87 Capacitores en serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 201
Si N capacitores están conectados en serie como se muestra en la figura
87. La capacitancia equivalente serie esta dada por:
1/Cser = 1/C1 +1/C2 +…..+ 1/CN
LECCIÓN 2: INDUCTORES
Los inductores almacenan energía en un campo magnético. El campo magnético es
creado por el paso de corriente a través de una bobina de alambre. En los circuitos
eléctricos, los inductores frecuentemente juegan el rol de
“suavizan”
las variaciones
de corriente.
138
que
Pero cuando la corriente es forzada a
cambiar abruptamente, el inductor genera un gran voltaje inducido
Inductancia y voltaje inducido
dispositivos
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 88 nos muestra las partes de un inductor. Este dispositivo de dos terminales
consiste de un alambre enrollado alrededor de un nucleo. El nucleo puede ser
cilíndrico como el que se muestra. El enrollamiento tiene
N vueltas, aisladas la una a la otra del núcleo.
Figura 88 Partes de un inductor
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 205
Cuando el alambre lleva corriente i, un campo magnético es creado en el espacio
alrededor de la bobina y se concentra dentro núcleo, como se muestra en la figura
88b. Similar a un campo eléctrico, el campo magnetico tienen energía que viene desde
la fuente que establece el campo. Por lo tanto un inductor almacena energía en un
campo magnetico producido por el paso de movimiento a través de una bobina.
La fuerza del campo magnético puede ser expresada en términos del flujo magnético Φ
a través del núcleo, y el producto NΦ
es conocido como un flujo total. La
experimentación y la teoría indican que el flujo total es directamente proporcional a la
corriente, y así se puede escribir NΦ = Li. La constante de proporcionalidad L es la
inductancia, es definida por
139
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
L = NΦ/i
La cual es medida en henrios (H), llamados asi en honor al inventor americano Joseph
Henry (1797-1878). Para el sistema internacional el flujo esta dado en weber. La última
ecuación muestra que 1 Henry es igual a 1 weber por amperio. Pero 1 weber es
equivalente a 1 voltio – segundo, y nosotros podemos expresar las unidades de
inductancia como:
1 H = 1 V*s/A
Los valores practicos de inductancia van desde varios henrios hasta unos pocos
microhenryos,
dependiendo
del
tamaño
y material
de
la
bobina. Todos los
circuitos pueden tener pequeñas cantidades de inductacia de perdidas porque la
corriente a través de cualquier conductor – sobre un alambre recto – crea un capo
magnetico alrededor del conductor.
La estructura de la inductancia de la figura 88a da un aproximamiento a la formula:
L = µr µ0N2A/l
Donde A es el area del nucleo, l es la longitud, y µ es la permeabilidad selectiva del
material del nucleo comparado con la permeabilidad del espacio – libre µ0. La
permeabilidad del espacio libre es
µ0 = 4Π x 10-7 = 1.26 µH/m
Para el espacio libre se tiene que µr =1, por definición, y los materiales no magneticos
tienen µr ≈ 1, donde para los materiales ferromagneticos se tiene µr >>1.
Grandes inductancias requieren bobinas con cientos de vueltas envueltas sobre acero o
nucleo de hierro.
Supongamos que la corriente que circula a través de un inductor varía con el tiempo,
y asi que Φ varia con el tiempo. La leyes de Faraday nos dice que el flujo que varia
con el tiempo induce un voltaje de bobina dado por v
140
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
= Nd Φ/dt. Pero Φ = (L/N)i, y si L y N son constantes, entonces dΦ/dt = (L/N) di / dt
, así que el voltaje inducido es:
V = L di/dt
Este voltaje aparece a través de las terminales de la bobina. El símbolo de un inductor
se muestra en la figura 89 incluyendo las marcas para la convención usual pasiva. Si se
tiene una corriente llamada constante, entonces di/dt = 0 y asi el voltaje es igual a cero
por tanto se dice que un inductor ideal actua como un corto dc. Aplicando el principio de
dualidad obtenemos el valor de la energía instantánea almacenada:
Figura 89 Simbolo de un inductor
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 206
W = 1/2Li2
Cuando la corriente y energía almacenadas cambien con el tiempo, la potencia
instantánea liberada por un inductor está dada por:
P = iv = L i di/dt
Ejemplo: Análisis en estado – estable
141
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El circuito en la figura 90a se conoce que se encuentra en estado estable, esto significa
que todos los voltajes y corrientes son constantes. El inductor por tanto actua como
un corto circuito y el capacitor como un circuito abierto. Nosotros podemos calcular
el valor de la energía resultante almacenda.
Figura 90 Circuito de aplicación de estado – estable
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 208
Usando las propiedades dc, nosotros podemos redibujar el circuito como se muestra
en la figura 90b, donde claramente se ve que :
iL = 30/(20 + 40) = 0.5 A
vC = 40/20 + 40 * (30) = 20 V Por tanto, el voltaje
individual almacenado en el circuito es
wL = ½ (16 x 10-3)0.52 = 2 mJ
wc = ½(5 x 10-6)202 = 1mJ La energía total
almacenada en el circuito es w = wL + wC = 3mJ Relaciones de corriente – voltaje
Teniendo establecida la dualidad entre inductancia y capacitancia, nosotros ahora
mostramos
las
correspondientes
relaciones
inductores.
142
entre corriente
y voltaje par los
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Cuando se conoce la corriente inicial i(t0) en el tiempo t = to, la corriente instantánea
en cualquier momento del tiempo esta relacionada por el
voltaje v (t) por:
t
1
∫Lto v(λ )dλ t > t0
i(t) = i(t0) +
Alternativamente, dejando t0 → -∞ y asumiendo que i (-∞) = 0. La ultima
ecuación se simplifica a:
t
i(t) =
1
∫Lv(λ )dλ
−∞
Esta expresión nos muestra que el inductor también posee memoria eléctrica, la
corriente a cualquier tiempo t depende del comportamiento del voltaje.
Si el voltaje es constante en v = V desde t = t1 a t = t2, entonces la corriente resultante
es:
i (t) = i(t1) + V/L (t – t1)
t1 < t ≤ t 2
El voltaje constante produce una rampa de corriente que comienza en i (t1)
y se incrementa de manera lineal con una pendiente di/dt = V/L.
Inductancia en serie y paralelo
Cuando N inductores como se muestran en la figura 91 se encuentran conectados
en serie. Entonces la inductancia equivalente serie es:
Lser = L1 + L2 +……+ LN
140
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 91 Inductores en serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 210
Observe que esta ecuación tiene exactamente la misma forma que la resistencia
equivalente serie.
Figura 92 Inductores en paralelo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 210
141
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Si N inductores se encuentran en paralelo como se muestra en la figura 92, entonces la
inductancia equivalente paralelo está dada por :
1/Lpar = 1/L1 + 1/L2 +….+ 1/LN
Ejemplo: Calculo de una red LR
Suponga que se conoce que la red de la figura 93a, no tiene efectos de inductancia
mutua y que:
I(0) = 0 ia (t) =5t
t≥0
Se necesita encontrar las variables resultantes para las terminales v(t) y i(t)
para t ≥ 0.
Observemos que dos inductores de 0.4 H pueden combinarse dentro de un equivalente
paralelo Lpar = (0.4 x 0.4) / (0.4 + 0.4) = 0.2 H. También podemos observar que
los otros dos inductores conducen la misma corriente, asi que se pueden combinar
en un equivalente serie Lser = 0.1 +
0.5 = 0.6 H. La figura 93 b muestra el diagrama simplicado. Tenga en cuenta que
las reducciones serie – paralelo son posibles porque usted no combina elementos de
diferentes tipos.
Tomando el diagrama simplificado, usted puede observar que:
Figura 93: Calculo de un red RL
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 212
142
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
v(t) = 2ia(t) + 0.6 dia/dt = 10t + 3 i(t) = ia(t) + ib(t) = 5t + ib(t)
Despues se obtiene ib(t) de v(t) por remplazo de v(λ) = 10 λ + 3 y se
obtiene :
1
ib(t) = ib(0) +
t
0.2 ∫0
3)dλ
2
(10
λ+
= ib(0) +
25t
Finalmente, si evaluamos ib(0) de
I(0) = ia(0) + ib(0) = ib(0) = 0
Por tanto:
i(t) = 5t + 0 + 25t2 + 15t = 25t2 + 20t
143
+ 15t
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 3: CIRCUITOS DINÁMICOS
Los circuitos dinámicos incluyen al menos dos tipos diferentes de elementos
– capacitancia y resistencia, o inductancia y capacitancia. Las ecuaciones de los
elementos como capacitores e inductores incluyen derivadas
relaciones
de corriente
– voltaje
para
en el tiempo,
las
cada circuito usualmente se toman de
ecuaciones diferenciales. Obtener las soluciones de estas ecuaciones es una parte
esencial
del análisis
de circuitos porque el comportamiento dinámico aparece en
numerosas aplicaciones. Inicialmente se formula la ecuación diferencial para algunos
circuitos típicos. Entonces se muestra como las ecuaciones pueden resolverse para en
particular tres tipos de comportamiento: la respuesta natural, la respuesta forzada, y
la respuesta completa.
Ecuaciones diferenciales de circuitos:
El análisis de cualquier circuito dinamico comienza con dos tipos fundamentales de
información:
•
Las leyes de Kirchhoff para la configuración del circuito.
•
Las ecuaciones de los componentes para los elementos individuales.
La combinación de estas ecuaciones con las leyes de Kirchhoff nos llevan a las
relaciones entre las variables de rama y las fuentes aplicadas. Algunas veces el
resultado es una expresión directa relacionando las variables de rama a las fuentes
aplicadas.
Más
frecuentemente,
sin embargo, las relaciones son indirectas en la
forma de una ecuación diferencial.
Como un ejemplo sencillo considere la red serie RL que contiene una fuente de
corriente como se muestra en la figura 94. El voltaje resultante en la terminal v
puede ser la variable de interés aquí, y las leyes de voltaje de Kirchhoff requieren que
el voltaje de los elementos se puedan expresar como:
144
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
vL + vR = v
Figura 94 Circuito RL
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 213
El voltaje de los elementos esta dado por las siguientes ecuaciones:
vL = Ldi/dt
vR = Ri
Insertando estas ecuaciones en la ecuación de Kirchhoff se obtiene:
v = Ldi/dt +
Ri
Pero supongamos que la misma red contiene una fuente de voltaje como se muestra
en la figura 94b . La ley de Kirchhoff de voltajes tiene la misma forma al igual que las
ecuaciones de los elementos. Sin embargo v es ahora la fuente aplicada y la corriente
i es la variable de rama desconocida, asi que di/dt es también desconocida. Por lo tanto
podemo escribir la expresión
Ldi/dt + Ri = v
Esta ecuación es llamada una ecuación diferencial no homogénea lineal de primer –
orden: es una ecuación diferencial porque la variable desconocida y su derivada esta
presentes. Es de primer orden porque no hay derivadas de mayor orden que la de la
variable desconocida en la ecuación.
Para continuar con nuestros análisis observemos el circuito paralelo RC de la figura
95a. Este circuito contiene una fuente de corriente, la aplicación de la KCL nos indica
que:
145
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ic + iR = i
Donde ic = Cdv/dt
iR=v/R Relacionando estas dos expresiones tenemos:
Cdv/dt + (1/R) v = i
Figura 95 Circuitos RC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 214
El circuito serie RC de la figura 95b mestra un cambio en el circuito, la aplicación
de la ley KVL nos muestran la siguiente expresión:
Ri + 1/C ∫ i(λ) d λ = v
Cuando se convierte esta ecuación diferenciando ambos lados con respecto al
tiempo, se tiene que:
d/dt ∫ x (λ) d λ = x(t) Asi que
R di/dt + (1/C)i = dv/dt
Respuesta natural
La tarea de resolver una ecuación diferencial de un circuito se puede tratar de acercar
primero a la respuesta natural. Este caso especial es más sencillo porque la
respuesta natural es la solución del circuito con la función forzada puesta a cero.
146
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Matematicamente llamaremos la respuesta natural
a la solución complementaria.
Fisicamente, la respuesta natural ocurre por si misma cuando la sola excitación se
convierte desde la energía interna alamacenada.
Suponga por ejemplo, el circuito paralelo de la figura 96 la cual no tiene aplicada fuente
y por lo tanto no tiene entrada de corriente. Aun asi, si el capacitor se ha cargado ha
algún
voltaje
inicial,
entonces
fluye
una corriente iR a través de R y el voltaje
cambian con el tiempo cuando el capacitor se descarga. La etiqueta vN (t) nos indica
que este voltaje es una respuesta natural.
Figura 96 Red RC con respuesta natural
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 217
De manera mas general, considere cualquier variable de rama y(t) en cualquier circuito
de
primer
orden
descrito
por
la
expresión
genérica a1dy/dt + a0y = f(t):
concentrándonos solamente en la respuesta forzada; denotada por yn(t) ; nosotros
habilitamos y = yn y f(t) = para obtener: a1 dyN/st + a0yN = 0
Se tiene ahora una ecuación diferencial homogénea. Pero una ecuación homogénea
no puede ser resuelta por manipulación algebraica porque se necesita conocer la
solución yN para evaluar dyN/dt y visceversa. Pero en vez de esto desarrollaremos un
acercamiento informal en donde:
147
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
yN = -(a1/a0) dyN/dt
Esta expresión muestra que yN(t) debe ser proporcional a nuestra derivada y la única
clase de función en el tiempo que cumple con esta propiedad es la forma de onda
exponencial. Nosotros podemos entonces asumir que:
yN (t) = Aest
Donde A y s son constantes a ser determinadas. Si yN(t) es dada en la ultima
ecuación , entonces dyN/dt = s Aest .
Para probar nuestra la solución que asumimos, se sustituye la ultima ecuación en
la ecuación homogénea diferencial para obtener a1sAest + a0Aest = 0. Factorizando
el término común Aest entonces se obtiene:
(a1s + a0)Aest = 0
La cual se cumple si a1s + a0 = 0 o Aest = 0. Esta ultima opción corresponde
a el caso yN = Aest = 0. Retomando la primera opción tenemos:
a1s + a0 = 0
Esta relación es conocida como la ecuación característica porque esta dicta el
valor de s, resultando en s = -a0/a1. Por tanto la solución no trivial para la ecuación
diferencial homogénea es
yN(T) = Aest
s= -a0/a1
Una derivación alternativa de esta última ecuación es dyN/dt = -(a0/a1)yN
De la cual
dyN /yN = -(a0/a1)dt
La integración de ambos términos: Ln yN = -(a0/a1) + Kint
148
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde Kint es la constante de integración. Ahora recordemos que si ln a =
b entonces a = eb, asi que
yN = e[-(a0/a1)t + kint] = ekinte-(a0/a1)t
Tomando ekint = A
Finalmente tenemos que yN(t) = Ae-(a0/a1)t
Esta solución satisface la ecuación homogénea con cualquier valor constante
A. Evaluando A sin embargó se requiere información adicional. La información más
útil para este propósito es la condición inicial de la respuesta natural. En particular si
conocemos que yN(0+) = Y0, entonces nosotros habilitamos t = 0+ para obtener
yN(0+= Ae0+ = A = Y0
Asi que yN ( t) = Y0e-(a0/a1)t
t>0
Esta expresión nos indica que la respuesta natural de un circuito de primer orden con
a0/a1 > 0 comienza con el valor inicial Y0 y decae exponencialmente hacia cero como t
→∞.
El decaimento exponencial puede también aparecer en la respuesta natural de circuitos
que contienen más de un elemento que almacena energía. Por ejemplo tomando el
circuito de segundo orden descrito por:
4d2y/dt2 + 32dy/dt + 60y = f(t)
La ecuación homogénea relacionada es:
4d2y/dt2 + 32dyN/dt + 60yN = 0
Esta ecuación de segundo
orden n puede ser resuelta por integración, como en el
primer caso. Sin embargo, al asumir que yN(t) = Aest ≠ 0 no muestra que
4s2Aest + 32sAest + 60Aest = 0
Lo cual no conlleva a la ecuación característica:
4s2 + 32s + 60 = 0
149
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Factorizando esta ecuación cuadrática tenemos que:
4(s + 3)(s + 5) = 0
Por tanto as obtienen dos raíces diferentes, nominalmente: S = -3
Ambos
valores
superposición
de
s
satisfacen
la
ecuación
s = -5
homogênea,
y
por
se tiene un circuito lineal, la respuesta natural consiste en dos
funciones exponenciales de la forma:
yN(t) = A1e-3t + A2e-5t
Evaluando las constantes A1 y A2 se requieren dos condiciones iniciales, siendo
consistentes con el hecho de que un circuito de segundo orden almacena energía
en dos elementos separados. Pero observe que yN (t) decae exponencialmente a cero.
En un circuito consistente en resistores y elemento de almacenamiento de energía, pero
no con fuentes controladas, entonces la respuesta natural tiene una duración extensa y
yN(t) → 0 como t→∞
Los circuitos
que tienen esta propiedad
son llamados
a ser estables. El
comportamiento estable ocurre porque la resistencia eventualmente disipa toda la
energía inicial almacenada. Los circuitos que tienen fuentes controladas no pueden ser
estables.
Respuesta forzada
Ocurre cuando en el circuito la función forzada no es cero establecida por una fuente
aplicada. De manera mas especifica la respuesta forzada es la solución
ecuación diferencial no homogénea, independiente de cualquier condición.
150
de
la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Matematicamente se llama esta respuesta la solución particular porque hay solamente
una solución dada por la ecuación diferencial con una función forzada dada.
Asi yF(t) denota la respuesta forzada de cualquier rama variable. Para circuitos de
segundo orden el comportamiento de yF(t) es gobernada por la ecuación homogénea.
a2d2yF/dt2 + a1dyF/dt + a0yF = f(t)
Esta ecuación también se aplica para circuitos de primer orden simplemente
dejando a2 = 0.
Nosotros emplearemos el método de coeficientes indeterminado. El cual consiste de
dos pasos:
1. Seleccionar una solución de prueba yF (t), esta debe ser tomada de una suma de
productos o de una solución de prueba.
2. Evalue los coeficientes por sustitución de yF (t) dentro de la ecuación diferencial con la
función forzada. Los valores de los coeficientes son entonces determinados
de la
propiedad que resulte de la expesión para todo t. Por tanto. No puede haber
constantes desconocidas en el resultado final.
Respuesta completa
Asi como un respuesta forzada yF(t) satisface la ecuación no homogénea, esta no
necesariamente constituye la respuesta completa y(t) de un circuito dinámico.
La
diferencia entre y(t) y yF(t) depende de las condiciones iniciales la cuales no
afectan la respuesta forzada.
Contando con las condiciones iniciales generalmente se requiere otro componente en la
respuesta completa. Tal componente puede ser independiente de la función forzada,
esta debe satisfacer la ecuación diferencial homogénea.
151
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La repuesta completa tiene entonces la forma: Y (t) = yG(t) + yN(t)
Donde yN(t) incluye las constantes arbitrarias a ser evaluadas de las
condiciones iníciales sobre y(t).
El método clásico para completar la solución de una ecuación dinámica de un circuito
incluye los siguientes pasos:
1. Encuentre la respuesta natural yN(t) que satisfaga la ecuación homogénea e incluya
una constante arbitraria para cada elemento de almacenamiento de energía.
2.
Seleccione una solución de prueba para la función forzada en cuestión, y use la
ecuación no homogénea para determinar los coeficientes en yF (t).
3. Escriba la respuesta completa como y(t)
= yF(t)
en Yn(t) de las condiciones inciales sobre y(t).
152
+ yN(t) y evalue la constantes
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CAPITULO 6: CIRCUITOS AC LECCIÓN 1: FASORES
Ondas senoidales y fasores
La figura 97 muestra dos funciones familiares en el tiempo, la forma de onda coseno
Xm cos wt , y la forma de onda seno Xm sen wt. Ambas formas de onda exhiben el
mismo comportamiento oscilatorio que continua indefinidamente. La amplitud Xm es
igual al pico de la excursión vertical, y en el contexto de un circuito, la unidad de Xm
será los voltios por amperio. La frecuencia angular w es igual al valor de la oscilación en
radianes por segundo (rad/s), y las formas de onda se repiten a si mismas cuanto el
tiempo t se incrementa por 2Π/w.
Figura 97 Ondas sinuidales
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 235
El valor de la oscilación puede también especificarse de otras dos maneras. La
duración de un ciclo completo es el periodo, definido por:
T = 2Π/w
153
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El inverso del periodo es la frecuencia, definida por: F = 1/T = w/2Π
Esta cantidad corresponde al número de ciclos de oscilación por segundo, y la unidad
de este es nombrado como hertz (Hz). Supongamos que la frecuencia de oscilación
es f = 60 hz. Entonces el periodo T = 1/f = 16.7 ms y la frecuencia en radianes es w
= 2Πf = 377 rad/s.
La única diferencia entre las dos formas de onda de la figura 98 es el punto donde i =
0. Para permitir cualquier posición del origen del tiempo. Se escribe una expresión
general de la forma:
X(t) = Xm cos (wt + Φ)
El término adicionado
Φ es llamado el ángulo de fase, o simplemente la fase, con
respecto a la función de referencia coseno. Esta fase puede ser expresada en radianes
cuando se evalua el angulo total instantáneo wt + Φ es usualmente medido en grados.
Figura 98 Forma de onda sinuidal
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 236
Adicionando Φ en el argumento de una función coseno cuando se cambia el pico
positivo de t = 0 a t = t0, como se muestra en la figura 98. Si Φ es
154
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
positivo, entonces t0 puede ser negativo porque wt0 + Φ = 0 para el pico. Asi para
cualquier Φ
T0 = - Φ(rad)/w
- Φ(deg)/3600 T Donde observemos que 2Πrad = 3600.
Recordemos también la identidad trigonometrica: Sen α = cos (α - 900)
Cuando un signo negativo ocurra, este puede ser absorbido con el angulo de fase:
-cos α = cos (α +/- 1800).
Para ilustrar este punto, la expresión senoidal -6sen (wt + 500) puede ser reescrita
como:
-6 sen (wt + 500) = -6cos (wt + 500 + 900) = 6 cos (wt – 400 +/- 1800)
Asi la amplitude es Xm = 6 y la fase tiene que ser Φ = -400 + 1800 = 1400 o Φ = -400 1800 = -2200. En tales casos, usualmente se toma un valor de Φ que este en el rango
-1800 ≤ Φ ≤ 1800.
La forma de onda genérica x(t) = Xm cos (wt + Φ) involucra tres parámetros:
amplitud Xm, frecuencia
w, y fase Φ. Estos tres parámetros tiene características en
dos dimensiones como se muestran en la figura
99a., llamado un fasor rotatorio. Aquí una línea directa de longitud Xm forma el
ángulo total wt + Φ relativo al eje horizontal. Así la línea rota en el sentido de las
manecillas de un reloj cerca del origen con un valor de ciclo f = w/2Π, y la proyección
se dibuja fuera de los valores x(t) = Xm cos (wt + Φ). Nosotros podemos ver cualquier
señal oscilante como una proyección horizontal de un fasor de rotación.
155
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 99 Fasor de rotación
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 237
Una figura instantánea de un fasor de rotación tomada en t = 0 es llamado un fasor sin
rotación como se muestra en la figura 99b. Este fasor tiene solamente dos parámetros,
longitud y angulo, se puede representar por la notación:
X = Xm ∟ Φ
El símbolo X denota el fasor asociado con la forma de onda senoidal x (t) = Xm cos (wt
+ Φ), y el símbolo Xm ∟ Φ
significa que X tiene una longitud Xm y un angulo Φ
medido de acuerdo a las manecillas de un reloj del eje horizontal.
La notación fasorial no incluye información acerca de la frecuencia.
Ejemplo: Forma fasorial de una señal oscilante
Suponga que el análisis de un circuito ac con frecuencia f = 200Hz tiene un fasor de
corriente
I = 7mA ∟-450. Se necesita escribir la correspondiente expresión sinuidal
para i(t).
La frecuencia angular en radianes de i(t) es w = 2Πf = 400Π rad / s, y el fasor tiene
una amplitud de Im = 7 mA y un angulo Φi = -450. Por tanto:
156
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
i(t) = Im cos (wt + Φi) = 7 cos (400Πt – 450) mA.
Numeros complejos
Un plano complejo es mostrado en la figura 100, es un espacio en dos dimensiones con
un punto A que puede ser especificado usando 2 cordenadas. Por convensión el eje x
es llamado eje real (abreviado Re), y el eje vertical es llamado eje imaginario
(abreviado Im). De manera correspondiente la coordenada horizontal de cualquier
puento es llamado la parte real de A, y la coordenada vertical es llamada la parte
imaginaria de A. Estas dos coordenadas son denotadas por:
Re[A] ar
Im[A] = ai
Figura 100 Plano complejo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 239
También se introduce la unidad imaginaria como:
j=
−1
Esta unidad imaginaria
permite expresar cualquier punto A como un número
complejo de la forma:
A = Re[A] + jIm[A] = ar + jai.
Cualquier puto en el plano complejo tambien puede Ser especificado por lãs
coordenadas polares como se muestra en la figura 100b, donde se adiciona una
línea directa desde el origen a el punto A. La longitud de la
157
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
línea es llamada la magnitud de A simbolizada por │A│. El angulo es la medida en
el sentido de las manecillas del reloj relativa a la posición del eje real positivo llamado
el angulo de A. Entonces mediante la notación polar se puede expresar un número
complejo mediante:
A = │A│∟ Φ
Para convertir un número complejo de la forma polar a la forma rectangular
observemos de 100b que:
Ar = │A│cos Φa
ai = │A│sen Φa
Se puede observar entonces que:
Φa = tan-1(ai/ar).
│A│ =
Formula de Euler’s
La relación entre las formas rectangular y polar de números complejos esta dada por
una famosa relación conocida como formula de Euler, esta expresa que para
cualquier angulo α:
e+/-jα = cos α +/- jsen α
Así la cantidad es un numero complejo con Re[e+/-jα] = cos α y Im [e+/-jα] =
sen α
Las correspondientes cordenadas polares están dadas por
│ejα│ = 1
∟ ejα = α
De acuerdo con esto se puede escribir:
ejα = 1∟ α
jα
Esta expresión trae el hecho de que e es una línea de longitud unitaria y un angulo
α, como se diagrama en la figura 101
158
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 101 Formula de Euler en el plano complejo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 243
Condiciones AC de estado estable
Para cualquier circuito lineal operando en el estado estable ac, se debe cumplir
que:
Todos los voltajes y corrientes sean periodicas oscilantes a la misma frecuencia
de la fuente.
La notación fasorial provea una forma conveniente de representar las amplitudes
de la forma de onda y los angulos de fase.
Los cálculos involucrando las leyes de Kirchhoff se pueden realizar usando fasores.
Ejemplo: Red paralela con fuente de voltaje AC
La figura 102a muestra una red paralela que cuenta con una fuente de voltaje ac:
V (t) = 30 cos (4000t + 200) V
159
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La fuente ha sido aplicada algún tiempo atrás, y necesitamos encontrar
resultante de estado estable
la corriente
i(t) = iR(t) + ic(t). La corrinte de estado – estable es
Figura 102 Red paralela con fuente AC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 247
Sinuidal a una frecuencia w = 4000, se debe determinar i(t) de la suma fasorial I =
IR + IC.
Con R = 5Ω, la corriente a través del resistor es fácilmente encontrada por la ley de
Ohm:
0
IR(t) = v(t)/R = 6 cos (4000t + 20 )A Se puede expresar fasorialmente: IR = 6A ∟200 =
5.64 + j2.05
Para obtener la corriente del capacitor, C = 25 µF = 25 x 10-6F y
diferenciando v(t) para obtener:
ic (t) = Cdv(t)/dt = 25 x 10-6(-4000 x 30 sen (4000t + 200)]
= -3 sen (4000t + 200) = - 3cos(4000t + 200 – 900)
160
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
= 3 cos (4000t – 700 +/- 1800)V
Asi tomando el angulo de fase -700 + 1800 = 1100, Ic = 3 A ∟1100 = -1.03 + j2.82
Estos cálculos confirman que ambos iR (t) y ic (t) son senosoidales con w =
4000 y pueden se representarse por fasores asociados.
Ahora se puede obtener I de la suma de fasores dibujada en la figura 102b. Sumando
los componentes rectangulares y convirtiendo a la forma polar se tiene:
I = IR + IC = 4.61 + j4.87 = 6.71 A ∟46.60
Entonces Im = │I│ = 6.71 A, Φi = ∟I = 46.60
Y i(t) = Im cos (wt + Φi) = 6.71 cos (4000t +46.60) A Que es el resultado final
LECCIÓN 2: IMPEDANCIA Y ADMITANCIA Impedancia y admitancia
de elementos:
Bajo las condiciones ac de estado estable, ambos el voltaje a través de un elemento
de un circuito y la corriente son oscilantes con la misma frecuencia. De acuerdo
con esto podemos escribir las expresiones en general como:
v (t) = Vm cos (wt + Φv) = Re [Vejwt] i (t) = Im cos (wt + Φi) = Re [Iejwt] Donde los fasores
asociados son:
V = Vm ∟Φv
I = Im∟Φi
161
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El objetivo es encontrar
las relaciones entre V y
I para resistores, inductores y
capacitores.
Resistores: Un resistor es descrito por v = Ri, sugiere que V
jwt
= RI. Para confirmar
jwt
esto, se sustituye v(t) = Re[Ve ] y i(t) = Re[Ie ] dentro de la ley de Ohm para
obtener:
Re [Vejwt] = R x Re[Iejwt]
De acuerdo a la propiedad general que k Re[A] = Re[kA] cuando k es una cantidad real,
asi que:
Re[Vejwt] = Re[RIejwt]
Esta relación aplica par cualquier valor de tiempo t, la ecuación fasorial para un
resistor es enconces:
V = RI
Como se esperaba. Si expresamos estas dos ecuaciones de forma fasorial tenemos
que:
Vm ∟Φv = R Im∟Φi
Donde claramente podemos observar que: Vm = RIm
Φv = Φi
Asi las amplitudes difieren por un factor de R, pero los ângulo de fase son
los mismos.
La figura 103a muestra
el diagrama fasorial
correspondientes formas de onda.
162
y las
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 103 Diagramas fasoriales y formas de onda
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 251
Inductores: Si derivamos la ecuación de fase para un inductor de la ecuación
elemental v = Ldi/dt. Con i expresada en términos de I. Obtenemos:
di/dt = d/dt Re[Iejwt] = RE [I dejwt/dt] = Re [Ijwejwt] Esto es
Re[Vejwt] = L Re[Ijwejwt] = Re [jwLIejwt] En donde
V = jwLI
163
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Escribiendo jwLI = wL ∟900 x Im ∟Φi = wLIm ∟Φi + 900. Donde las ecuaciones
de fase y amplitud se convierten en
Vm = wLIm
Φv = Φi +900
El diagrama de fase de la figura 103b muestra que I atrasa a V por 900. De manera
correspondiente cada pico de la forma de onda de i(t) ocurre después de un pico
de v(t).
Capacitores:
La ecuación de fasores para un capacitor es el dual del inductor esto esto es se tiene
que I = jwCV, o
V = 1/jwC I
= -j/wC I
Entonces se tiene: Vm = Im/wC Φv = Φi - 900
El diagrama fasorial de la figura 103c muestra que I adelanta a V por 900, así el pico
de i(t) ocurre siempre antes de un pico de v(t).
164
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 104 Elemento en el dominio del tiempo y de la frecuencia
165
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 252
La figura 104 nos muestra un resumen de los resultados. Donde se observan los
diagramas en el dominio del tiempo mostrando las relaciones para cada elemento.
También se observa los diagramas en el dominio de la frecuencia porque ZL y ZC
dependen de w.
De igual manera se emplea en algunos cálculos el concepto de admitancia la cual es
definida por
Y = 1/Z
Esta es medida en siemens (S), el inverso de los ohmios. En términos de admitancia la
ley de Ohm se convierte en:
I = YV
Ejemplo: Cálculos de un condensador
En el ejemplo anterior encontramos mediante diferenciación el fasor de corriente Ic
del voltaje a través de un capacitor de 25 µF el cual fue de v =
30 cos (4000t + 200)V. Ahora determinamos Ic por medio de la ley de Ohm
para un circuito ac.
Con C = 25 x 10-6 y w = 4000, la impendancia y admitancia del capacitor son:
ZC = -j/wC = - j10Ω = 10Ω∟-900
YC = 1/ZC = + j0.1S = 0.1S∟-900
Asi que V = 30 V∟200
Ic = YcV = 0.1 S ∟-900 x 30 V ∟200 = 3A∟1100
Pero si la frecuencia de la fuente se incrementa a w = 20000 entonces la impedancia
0
se decrementa a Zc = 2Ω∟-90 , mientras la admitancia se
166
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
incrementa a Yc = 0.5 S∟900. La amplitud de corriente de otra manera se incrementa
a │Ic│ = 15A.
Impedancia y admitancia equivalente
En general, diferentes tipos de elementos no pueden ser combinados dentro de un
elemento equivalente. Sin embargo, bajo las condiciones de estado estable, en una red
consistente
de resistores, inductores, y capacitores actúan
las terminales como una
impedancia equivalente. La figura 105 es el diagrama en el dominio de la frecuencia de
una red serie operando en el estado estable ac a alguna frecuencia w. A pesar del
tipo de elementos particulares, el fasor de voltaje y corriente asociado con cada
elemento esta relacionado por las impedancias elementales V1 = Z1I, V2 = Z2,etc. La
aplicación de la KVL nos permite obtener:
V = V1 + V2 + …. + VN = Z1I + Z2I + ….+ZNI
=(Z1 + Z2 + ..+ZN)I = ZNI
Figura 105 Admitancia e impedancia equivalente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 254
Em donde la impedancia equivelente serie esta dada por: Zser = Z1 + Z2 +....+ ZN
Asi, la impedancia serie es similar a las resistências en serie.
La red paralela de la figura 105b, es el dual de la red serie. De manera que
I = YparV, con la admitancia equivalente paralela:
167
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ypar = Y1 + Y2 +….+ YN
Figura 106 Red de carga
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 255
Como una extensión de los casos paralelo y serie, tenemos una red de carga
como la figura 106 consistente en resistores, inductores y fuentes controladas, pero
no fuentes independientes. Los voltajes y corrientes terminales en el estado estable ac
son sinusoidales teniendo asociados los fasores V y I, y la razón V/I será constante. Asi
se defiene la impedancia equivalente como:
Zeq = V/I
Para tener en cuenta las propiedades de los números complejos, frecuentemente se
escribe cualquier impedancia en la forma:
Z = Z(jw) = R(w) + jX(w)
Donde R(w) = Re [Z]
X(w) = Im [Z]
La parte R(w) es conocida como la resistência ac, y esta puede o no puede variar com
w. La parte imaginaria X(w) es conocida como reactancia y siempre varia con w.
167
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 107 Diagrama de impedancias en el plano complejo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 256
La figura 107 muestra el diagrama de una impedancia en el plano complejo con sus
compenentes horizontal R(w) y la componente vertical X (w). A esta figura se le
conoce como triangulo de impedancias. El número complejo Z no es un fasor porque
la impedancia no representa una función senoidal en el tiempo. De todas maneras
se puede representar Z en la notación polar:
Z =│Z│∟ θ
Con
θ = ∟Z = tan- X(w)/R(w)
La admitancia también es compleja dependiente de la frecuencia y puede ser escrita
por:
Y = Y(jw) = G(w) +jB(w)
Donde G(w) = Re [Y] B(w) = Im [Y]
La parte real de Y es
conocida como conductancia ac, y la parte imaginaria
es conocida como suceptancia.
168
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ejemplo: Analisis de impendancia de un circuito paralelo RC.
Considere un circuito paralelo RC con:
V = 30 cos (4000t + 200) V
R= 5Ω
C = 25µF
Figura 108 Circuito paralelo RC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 257
Se necesita determinar el fasor de corriente I suministrado por la fuente. La impedância
Del capacitor es:
0
Zc =-j/wC = -j10Ω = 10Ω∟-90
Podemos observar en la figura 108a el diagrama en el dominio de la frecuencia.
La impedancia equivalente conectada a la fuente es:
Z = 5││(-j10) = -j50/(5 – j10) = 4 - j2Ω = 4.47Ω∟-26.60
La figura 108b nos muestra el triangulo correspondiente de impedancia con R(w) = Re
[Z] = 4Ω y X(w) = Im [Z] = 2Ω. Alternativamente, se puede determinar la admitancia
equivalente.
Y = 1/5 + 1/-j10
=
0.2 +j0.1S = 0.224 S∟26.60
De donde G(w) = Re[Y] = 0.2 S ≠ 1/R(w) y B(w) = Im [Y] = 0.1 S ≠ 1/X(w). Finalmente
169
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
si se usa V = 30V∟200 y juntos Z o Y pueden calcular el fasor
de corriente:
170
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
I = V/Z = YV = 6.71 A∟46.60
LECCIÓN 3: ANALISIS DE CIRCUITOS AC
Todas las técnicas de análisis de circuitos resistivos incluyen diagramas en el dominio
de la frecuencia, con fasores en lugar de funciones en el tiempo, impedancia en lugar
de resistencia, y adtimancia en lugar de conductancia.
De igual manera el método de análisis de transformada fasorial consiste de tres pasos
generales:
1. Ir del dominio del tiempo al dominio de la frecuencia por representación de fasores y
evaluando elementos con impedancias a las fuentes de frecuencia.
2. Aplicar cualquier técnica apropiada para analizar el diagrama en el dominio de la
frecuencia para las respuestas fasoriales de interés.
3. Retornar a al domino del tiempo convirtiendo
la repuesta fasorial resultante a
senoidal.
En particular, se puede desarrollar y aplicar las versiones en el dominio de la
frecuencia de:
Proporcionalidad.
Teoremas de Thevenin y Norton y las convensiones de fuentes. Analisis sistematico de
nodo y ecuaciones de malla. Proporcionalidad
Teniendo en cuenta que la ecuación fasorial V = ZI es una relación lineal, se puede
analizar un circuito ac usando el método de proporcionalidad. Este método es
simple y directo para redes que incluyen una fuente controlada.
Para analizar tales redes, usted primero asume un valor conveniente para un fasor
de voltaje o corriente de la fuente. Depues trabaja hacia la fuente para
170
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
calcular otros fasores de voltaje y corriente utiles para obtener las condiciones en las
terminales que pueden producir estas variables de rama. Finalmente, si el valor del
fasor de fuente es dado, aplicando el principio de proporcionalidad se pueden
determinar los valores actuales de las variables de rama.
Ejemplo: Análisis AC con fuente controlada
Figura 109 Red AC con fuente controlada
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 263
La figura 109 muestra el diagrama en el dominio del tiempo y en el dominio de la
frecuencia de una red que contiene una VCVS y opera a w = 1000.
encontrar la impedancia de entrada
Z = V/I y la
Se necesita
corriente del capacitor
resultante i1 cuando v = 20 cos 1000 t V.
El metodo de proporcionalidad es aplicado a este problema porque los valores tales
como V/I son independientes del fasor actual de la fuente. De acuerdo, con el
171
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
procedimiento, usted puede asumir por conveniencia que:
172
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
I2 = 1A ∠0 0
= 1 + j0
En cuyo caso
Vx = j8I2 = j8
Tomando como base la malla de la derecha
V1 = (12 + j8)I2 = 12 + j8
I1 = V1/(-j4) = -2 + j3
I = I1 + I2 = -1
+
j3
V = 6I - 3Vx + V1 = 6 + j2
Por tanto la impedancia de entrada es:
∠ − 90 0
Z = V/I = 0 -j2 = 2Ω
Por tanto Re [Z]
=
0, la fuente controlada causa que la red tenga una
resistencia ac de cero cuando w = 1000.
Finalmente, para calcular i1, observe que de los resultados previos I1/I = (-2 +
j3)/(-1 + j3) = 1.14 ∠15.3 0
I = V/Z = 10 A ∠ − 90 0
. Entonces, con V = 20 V ∠0 0 ,
I1 = (I1/I)I = 11.4 A ∠105.30
Asi que i1 = 11.4 cos (1000t +105.30 A).
Redes Thevenin y Norton
Los teoremas de Thevenin y Norton permiten remplazar las redes ac con fuentes
por redes equivalentes. Las versiones en el dominio de la frecuencia de estos teoremas
difieren solamente en pocas cosas de las declaraciones originales.
172
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Como una red ac es cualquier red de dos terminales que contenga elementos lineales y
fuentes, incluyendo como minimo una fuente independiente ac. Si hay dos o más
fuentes
independientes,
entonces
cada uno de estas debes tener la misma
frecuencia para que puedan ser representadas en una red equivalente que contenga
una fuente sencilla.
Los parámetros Thevenin en el dominio de la frecuencia son el fasor de voltaje en
circuito abierto Voc, el fasor de corriente de corto circuito Isc, y la impedancia
Thevenin Zt = Voc/Isc. Para propositos de analisis las condiciones de las terminales,
para aplicar los Teoremas de Thevenin y Norton nos dicen que una red ac es
equivalente en el dominio de la frecuencia a un fasor de fuente de voltaje Voc en
serie con una impedancia Zi , o una fasor de corriente Isc en paralelo con una
impedancia Zt.
Por tanto las redes Thevenin y Norton son equivalentes el uno al otro, los tres
parámetros relacionados son
Voc = ZtIsc
Figura 110 Redes Thevenin y Norton en el dominio de la frecuencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 265
Siguiendo la figura 110 se tiene que Zt es igual a la impedancia equivalente de la red
después de que las fuentes independientes han sido suprimidas.
173
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ejemplo: Aplicaciones de una Red Norton AC
Figura 111 Aplicacion de una Red Norton AC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 266
Dado el circuito en el dominio de la frecuencia de la figura 111a, se necesita maximizar
la amplitud de la Terminal de voltaje V seleccionando las resistencia apropiadas y/o
elementos reactivos para la impedancia de carga Z. Para resolver este problema,
primero se encuentra la red equivalente Norton.
La impedancia Thevenin es fácilmente obtenida, sencillamente la red contiene
solamente
una fuente. Después
la fuente independiente
es suprimida
al ser
remplazada por un corto circuito, el inductor y el resistor puede estar en paralelo,
asi que
Zt = j40║280 -j20 = 5.6 + j19.2 = 20 Ω ∠73.7 0
El voltaje de circuito abierto es calculado usando el divisor de voltaje:
Voc =
280
10 = 9.90 V ∠ − 8.13 0
280 + j
40
La corriente de corto circuito es:
Isc = Voc/Zt = 0.495 A ∠ − 81.8 0
174
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 111 muestra la red Norton resultante con la carga.
175
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La admitancia equivalente conectada a la fuente de corriente es Yeq = Yt + 1/Z,
donde:
Yt = 1/Zt = 0.05 ∠ − 73.7 0
= 0.014 - j0.048S
Teniendo V = Isc/Yeq , la amplitud |V| puede ser maximo cuando |Yeq | tiene el valor
mas pequeño. Nosotros encontramos
el valor del inverso de
la impedancia
de carga de 1/Z = Y = G + jB, asi que
Yeq = Yt + Y = (0.014 + g) + j( B – 0.048)
|Yeq | =
(0.014 + G) 2 + ( B − 0.048) 2
La conductancia ac no puede ser negativa, pero la suceptancia B puede ser positiva
o negativa. De manera consecuente |Yeq | es mínima cuando G = 0 y B – 0.048 = 0.
De esta manera se necesita una carga que tenga.
Z = 1/Y = 0 - j20.8 Ω
Y = 0 + j0.048 S
Por tanto Z consiste enteramente de una reactancia negativa, la carga puede ser un
capacitor cuyo valor satisfaga la condición –j/wC = Z = -j20.8 Ω. Entonces se
necesita C = 1/20.8 w = 9.62 µF.
Finalmente se calcula el voltaje en las terminales. La admitancia minimizada es
Yeq = 0.014 + j0, y
V = Isc/Yeq = 35.4 V ∠ − 81.8 0
Cuya magnitud es considerablemente mayor que |Voc | = 9.90 V.
Ecuaciones de malla y nodo
Cuando un circuito ac contiene más de una fuente o tiene una configuración compleja,
el uso de ecuaciones sistematicas de nodo o malla frecuentemente proveen un metodo
de analisis más eficiente. Las tecnicas en el dominio de la frecuencia imitan estos
desarrollos
para circuitos
resistivos,
excepto
que se trabaje con favores de
impedancia o admitancia. También recuerde que si hay más de una fuente, entonces
todas las fuentes independientes deben tener la misma frecuencia.
176
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Metodo de Analisis de Malla AC
Las ecuaciones de matriz de malla para un circuito ac con una sola frecuencia toman la
forma general.
[Z][I] = [Vs]
Asi [I] es el vector desconocido de fasor de corriente, mientras [Vs] , es el vector
del fasor equivalente de voltaje. La matriz de impedancia [Z] tiene las mismas
propiedades de simetría que la matriz de resistencia [R] para un circuito resistivo,
excepto que los elementos pueden estar en cantidades complejas.
Si se tienen fuentes controladas presentes se puede expandir [Vs] como
[Vs] = [Vs] + [Z][I]
Y las ecuaciones de matriz de malla se convierten
[Z – Z][I] = [Vs]
Donde [Z – Z] = [Z] – [Z]
La escritura y resolucion de las ecuaciones de malla para circuitos ac siguiendo los
mismos principios desarrollados
para los circuitos resistivos. La unica diferencia
significativa es que en el caso de ac se incluyen número complejos.
Ejemplo: Analisis de malla sistematico AC
Figura 112 Analisis de malla sistematico AC
176
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 268
El circuito de la figura 112a es manejado por dos fuentes independiente
V = 30 cos (10 t + 600) V
i = 1 cos 10 t A
Ambas fuentes tiene w = 10. La figura 112 b muestra el diagrama en el dominio de la
frecuencia con la marcas del analisis de malla. La notación matricial puede no
necesitarse porque I1 es la unica corriente de malla desconocida. Sin embargo, se
puede seguir el analisis sistematico para denterminar Z y Vs, para la ecuación de malla
sencilla ZI1 = Vs.
Posteriormente se combinan las dos impedancias en paralelo para obtener
10║j20 = 8 + j4. Asi la suma de impedancias alrededor de la malla es: Z = (8 + j4) – j10
= 8 – j6Ω
Luego se usan las formas rectangulares del fasor de fuente para encontrar el
voltaje de red que conduce a I1. La fuente de voltaje tiene V = 30
∠60 = 15 +
0
j26, y la estructura Norton sobre el lado derecho tiene un voltaje de circuito abierto
–j10 x 1 que esta opuesto a I1, asi que:
V1 = (15 + j26) – ( -j10) = 15 + j36V Por tanto la ecuación de malla es
(8 – j6)I1 = 15 + j36
Al convertir esta expresión en la forma polar:
I1 = (39V ∠67.4 0 )/(10Ω
∠ − 36.9 0 ) = 3.9
A
∠104.3 0 .
LECCIÓN 4: DIAGRAMA DE FASORES Y RESONANCIA Diagrama de
fasores:
177
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El diagrama de fasor suministra una figura de información de las relaciones entre el
voltaje ac y la corriente. Estos diagramas son empleados incialmente para calcular los
valores de las variables del circuito.
Figura 113 Diagramas de fasores
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 271
Considere el circuito serie RL de la figura 113. La red de esta impedancia es Z
= R + jwL y:
Θ = ∠Z 0 = tan
-1
(wL/R)
Si tanto L y R son positivos y diferentes de
cero, entonces
el angulo de
impedancia se encuentra en el rango:
0 < Θ < 900
Esta propiedad es la información escencial necesaria para construir los tres fasores.
Por convensión, nosotros tomamos ∠I = 0 para establecer la fase de referencia porque
hay solamente una corriente en la red. Los angulos correspondientes de los fasores
de voltaje están determinados por:
V = ZI →
VR = RI →
∠V
=
∠V R
∠Z
+
∠I = Θ
=
178
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
∠I = 0
179
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
VL = jwLI → ∠V L
=
900
+
= 900
∠I
De manera adicional se conoce que: VL + VR = V
La figura 113 b muestra el paralelogramo basado en las consideraciones
anteriores.
De manera alternativa, nosotros podemos usar la parte inferior y superior de la
construcción. El triangulo es formado colocando el valor de VL en forma perpendicular a
VR para obtener V.
Figura 114 Red RC y su diagrama fasorial
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 273
Considere ahora el circuito serie RC de la figura 114a. La impedancia es Z = R – j/wC
asi que:
Θ = tan -1(-1/wCR) = -tan-1(1/wCR)
Si ambos C y R son positivos y no cero, entonces:
-900 < Θ < 0
179
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Tomando I como la fase de referencia, se encuentra que ∠V
donde:
=Θ
y
∠V = 0,
R
→
Vc = -jI/wC
∠V
∠I = -900
-900
+
C
El
diagrama
fasorial
resultante
muestra
I
y
y
las
dos
construcciones
triangulares para Vc + VR = V son dadas en la figura 114b. Observe que la dirección de
la flecha para Θ muestra que
el sentido de las agujas de un reloj denota un angulo
negativo.
Figura 115 Diagramas fasoriales de una red paralela
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 275
Cambiando a la red paralela de la figura 115a; jX muestra la impedancia de un inductor o
capacitor. En el caso RL paralelo, la admitancia es Y = G – j/wL y
∠Z = -
∠Y . Por lo tanto, el angulo de la impedancia se encuentra en el rango
de un angulo positivo que va de 0 < Θ < 900.
Ahora si tomamos ∠V
= 0 para el fasor de referencia, entonces:
I = V/Z
→
∠I
=
∠V ∠Z
IR = V/R
→
∠I R = ∠V = 0
= -θ
180
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
IL = V/jwL
→
∠I L =
∠V
= -900
0
90
181
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 115b muestra el diagrama con V e IR + IL = I . Finalmente, en el
caso RC paralelo, la impedancia tiene angulo negativo y
Ic = jwCV
→
∠I
=
900
C
+
= 900
∠V
El fasor es construido en la figura 115c.
Ejemplo : Construcción de un diagrama fasorial
Figura 116 Construcción de un diagrama fasorial
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 274
La impedancia en las terminales de la red de la figura 116a es Z = (-j5)║(4 + j2)
0
= 4 - j2 Ω, asi que θ = -26.6 . La figura 116b muestra el dibujo de los fasores
de voltaje y corriente al tomar los
∠I =0. Asi el diagrama fue construido siguiendo
siguientes pasos.
Primero, se dibuja I y V usando el hecho de que la red es capacitiva I adelanta a V por
26.60.
Sin embargo, las longitudes de I y V son arbitrarias estas tiene escalas
diferentes.
182
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Segundo, se construye VR y VL a escala tomando en cuenta que:
183
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
VR = 4I2
Asi,
VL = j2I2
∠V
=
L
R
∠V
+
900
VR + VL = V
, │VL│ = │VR│/2, y el fasor de voltaje forma un
triangulo con V como la hipotenusa.
Tercero, se construye I1, y I2 a escala observe que
I1 = V/(-j5)
I2 = VR/4 = VL/j2
I1 + I2 = I
Los fasores de corriente forman un triangulo, pero no un triangulo recto. Sin
embargo ∠I1
= ∠V
+ 900 mientras ∠I 2
∠V R
∠V
=
=
L
-900.
Resonancia en serie
Los inductores y capacitores tienen propiedades “opuestas” en dos aspectos: La
reactancia inductiva (XL = wL) es positiva
y se incrementa con la frecuencia,
de otra manera la reactancia capacitiva (Xc = -1/wC) es negativa y se decrementa
con la frecuencia. Estas propiedades lideran importantes e inesperados efectos en los
circuitos que contienen ambos tipos de elementos reactivos. Dependiendo de la
frecuencia de excitación, juntos la inductancia o la capacitancia pueden dominar, o
las dos reactancias
pueden cancelarse
y producir un fenómeno conocido como
resonancia.
Figura 117: Circuito serie RLC
184
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Fuente:
CALSON
A.
BRUCE.
Circuits.
Brooks/Cole.2000.
Pag
275
Observemos
en particular
el circuito serie de la figura 117a. La suma de la
impedancia de este circuito es:
Z(jw) = R + jwL -
j/wC = R + jX(w) Donde X (w) = wL - 1/wC
De un lado, la capacitancia domina en bajas frecuencias y la reactancia de la red es
negativa. De otro lado, la inductancia domina en altas frecuencias y la reactancia de la
red es positiva. El punto de cruce entre estos dos casos ocurre cuando w = w0 cuando:
X(w0) = Im[Z(jw0)] = 0
Esta última ecuación define la condición de resonancia serie. La correspondiente
frecuencia de resonancia serie para una circuito RLC debe satisfacer la condición
w0L - 1/w0C = 0 , esto es
W 02 = 1/LC y
Wo =1/√LC
185
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La red aparece puramente resistiva en la resonancia, por tanto Z(jw0) = R +
jX(w0) = R.
La figura 117 muestra la variación de la magnitud y el angulo de Z(jw) de la red
calculado de :
|Z(w)| =
R 2 + (wL − 1 / wC )
θ(w) = tan
2
1
wL − 1 / wC
R
-
0
Se observa que │Z(w)│ tiene un único minimo en w0, y el θ(w) va desde -90 a
+ 900 con w incrementándose .
Figura 118. Diagrama de fasores para un circuito serie RLC Fuente: CALSON A.
BRUCE. Circuits. Brooks/Cole.2000. Pag 276
El diagrama fasorial de la figura 118 muestra otra vista de la variación de
frecuencia para un circuito serie resonante. Aquí se toma
∠V X
= ∠V L
∠V
+
C
para construir
∠V = 0 y se tiene
VR + VX = V.La corriente I siempre
atrasa al voltaje VL por 900, el cual es adelantada por Vc en 900, y esta en fase con VR.
Pero la red es capacitiva per debajo de la frecuencia de resonancia (w<w0), asi el
diagrama de la izquierda nos muestra que │VL│< │VC│ además I adelanta a V. A la
186
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
inversa, la red es inductiva por encima de la frecuencia de resonancia (w > w0), asi el
diagrama a la derecha tiene
que │VL│> │VC│ e I
187
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
atrasa a V. El diagrama del medio muestra la situación de resonancia (w=w0)
cuando │VL│= │VC│, asi que Vx = 0, VR = V, e I esta en fase con V.
Aun cuando Vx = 0 en la resonancia, los voltajes individuales reactivos vL(t) y vc(t)
pueden tener grandes amplitudes – tal vez mayores que las amplitudes de las
terminales de voltaje- para explorar esta posibilidad, observe que las terminales de
corriente y voltaje a w0 estan relacionadas por I = V/Z(jw0) =
V/R. Entonces, con w = w0 = 1/√LC
VL = jw0LI =
j
L
VR
Qser =
C
woL
=
R
Vc
=
I
j
=jw0
C
L
VR
C
1
1 L
=
w0RC R C
Asi en la resonancia:
VL = jQmV
VC = -jQserV
Si Qser > 1, entonces las amplitudes │VL│y│VC│ pueden exceder a │V│ lo que se
conoce eomo aumento de voltaje de resonancia.
La figura 118b muestra que │VL│y│VC│ pueden ser arbitrariamente
comparadas
con
│V│. La
explicación
física
del
aumento
del
grandes
voltaje
de
resonancia esta relacionado con la energía de oscilación almacenada, el hecho de que
│Z(w0)│es minimo y la corriente │I│ transfiere una gran cantidad de energía de
atrás
y adelante
entre
el inductor
y el capacitor.
De hecho
alternativa más general para el factor de calidad esta dada por:
Q = 2π * máxima energía almacenada / energía perdida por ciclo
Resonancia paralelo
Figura 119: Red paralela RLC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 278
188
una expresión
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El dual de una red RLC serie es la red paralela de la figura 119 a. La
admitancia de esta red es:
Y(jw) = G + jwC - j/wL = G + jB(w) Donde G = 1/R y
B(w) = wC - 1/wL
La suceptancia B(w) cambia de signo conforme la frecuencia se incrementa, y se
define la condición de resonancia paralela por:
B(w0) = Im[Y(jw0)] = 0
Pero nuestra expresión previa para para la frecuencia de resonancia se
mantiene, por tanto w0C – 1/woL = 0, la cual requiere que:
Wo =1/√LC
De la misma manera, la red paralela también aparece puramente resistiva a la
resonancia por tanto Y ( jw0) = G = 1/R.
Para encontrar la diferencia entre la resonancia serie y paralelo, se calcula la magnitud
y el angulo de la impedancia de la red paralelo. Si se sustituye dentro de la evacuación
de admitancia Z (jw) = 1/Y(jw) obtenemos:
189
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
|Z(w) | =
1
G 2 + (wC − 1 / WL)
wL − 1 / wC
θ(w) = -tan-1
G
2
La figura 119b muestra la variación de frecuencia de │Z(w)│ y θ(w). Nosotros vemos
que
│Z(w)│tiene un unico máximo en w0, y θ(w) va desde +900 a -900 con w
aumentando de valor.
Una diferencia entre la resonancia serie y paralelo es que la red paralelo puede exhibir
una corriente pico de resonancia.
Aunque Ix = Ic + IL = 0 cuando w = w0, las
corrientes reactivas son:
Ic = jQparI
IL = -jQparI
El factor de calidad Qpar es dado por la expresión:
C
R
=R
wo L
L
Qpar = w0CR =
Asi que Qpar = 1/Qser cuando los valores de los elementos son iguales.
Figura 120: Redes paralelas RLC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 279
Por ultimo, si se toma en cuenta la resistencia Rw asociado con la inductancia real, se
190
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
considera la red modificada como el que se muestra en la figura 120a. Aquí Rw es la
unica resistencia y la admitancia de la red es:
191
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Y(jw) = jwC +
1
Rw + jwL
=
jwCRw − w 2 LC + 1
Rw + jwL
Si se tiene que Rw sea muy pequeña, se simplifica el analisis asumiendo que
Rw + jwL ≈ jwL. Entonces
Y(jw) ≈ (CRw/L) + j(wC - 1/wL)
Asi que Im[Y(jw0)] = 0 a w0 ≈ 1/ LC . Donde Rpar = L/CRw
LECCIÓN 5: SUPERPOSICIÓN AC Y PUENTES DE IMPEDANCIA
Ejemplo: Las dos fuentes en la Figura 121a operan con diferentes frecuencias. Nosotros
aplicaremos superposición para encontrar el voltaje de estado estable vc(t). Para este
proposito nosotros tomamos vc(t) = vc-1(t) + vc-2(t), donde vc1(t) es la componente a una frecuencia y vc-2(t) es la componente a la otra
frecuencia.
Figura 121 Superposición AC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 282
192
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Paso 1: Con la fuente de voltaje activa, nosotros tenemos w = 5 como se
muestra en la figura 121b que corresponde
frecuencia. De
al diagrama en el dominio de la
la misma manera se puede amplear el divisor de voltaje,
tomando la ecuación de nodo se tiene:
(
1
j
+
50
10
j
) Vc-1 =
20
60
j 20
Despejando se obtiene Vc-1 = -j300/(2+j5) = 55.7 V ∠ − 158.2 0
Paso 2: con la fuente de corriente activa, se tiene que w = 2 y la figura 121c es
el diagrama correspondiente en el dominio de la frecuencia. Observe que la
fasor de la corriente es 3
∠−
90
tomando que la corriente en el dominio del
0
tiempo es 3 sen 2t = 3cos(2t -900). La ecuación de nodo para este caso es
(
1
+
50
j
j
- ) Vc-2 = -3 ∠ − 90 0 = j3
25 8
De donde Vc-2 = j600/(4-j17) = 34.4 V ∠166.8 0
Paso 3: Después de convertir estos dos favores a señales senoidales, se tiene la
suma para obtener el resultado final
Vc(t) = 55.7 cos (5t-158.20) +34.4 cos(2t+166.80)V
PUENTES DE IMPEDANCIA
Los puentes de impedancia aprovechan la misma estrategia de balanceo que los
puentes Whetstone. Sin embargo un puente de impedancia debe contener ambos
elementos resistivos y reactivos porque una impedancia desconocida puede tener
componentes resistivos o reactivos. Específicamente las configuraciones
puente son
usadas para medir inductancias con una resistencia y capacitancia.
La figura 122 muestra la estructura general de un puente de impedancia en el dominio
de la frecuencia, con Zu desconocida. Las otras tres impedancias son conocidas, y dos
de estos son ajustables. El puente se balancea variando las
193
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
impedancias ajustables hasta que Vx = 0. Este voltaje nulo puede ser sensado
por un voltímetro ac, como se muestra, o mirando vx(t) en un osciloscopio.
Figura 122 Puente de impedancias
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 283
Bajo
las
condiciones
relacionadas
de
balanceo,
las
impedancias
desconocidas
a las otras tres por medio de la versión de impedancias
so
de la
ecuación de un puente de Wheatstone, la cual es:
Zu = Z2Z3/Z1
Esta ecuación incluye cantidades complejas, Un puente de impedancias permite la
medición simultánea de resistencia y reactancia. Nosotros podemos demostrar esta
capacidad examinando dos tipos particulares de puentes.
190
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 123 Puente Maxwell
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 284
El puente de comparación paralelo de la figura 123 a es empleado para una red RC
paralela desconocida.
La estructura paralela sugiere un analisis mediante la
admitancia Yu y Y3, entonces podemos escribir la siguiente expresión:
Yu = 1/Zu = Z1/Z2Z3 = (Z/Z2)Y3
Incluyendo los elementos correspondientes en la expresión obtenemos:
R1 1
(
+ jwC3)
R2
R3
1
+ jwCu =
Ru
Se obtiene entonces las partes real e imaginaria de ambos lados para obtener
Ru = (R2/R1)R3
Observe
que
necesitamos
Cu =(R!/R2)C3
w no
aparece
en esta expresión,
lo cual
significa
que
no
el valor de w. También observe que la capacitancia fuera de la
resistencia paralelo puede ser medida tomando R3 = ∞ (un circuito abierto).
Algunos puentes de comparación
disipación de condensadores
incluyen
un selector para leer el factor de
con fugas. Con Ru representando
191
las perdidas
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
resistivas, el factor de disipación es definido por
192
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
D = │Zc │/│ZR │ = 1/wCuRu
Un buen capacitor debe tener D << 1 asi que Ru >> 1/wCu. Si un inductor es colocado
en paralelo con Ru y Cy para formar un circuito resonante con wo= w, entonces el factor
de calidad puede ser Qpar = wCuRu = 1/D.
El Puente de Maxwell
de la figura 123 b comprende
una red RL serie
desconocida, pero el circuito emplea un red RC de balanceo de impedancia para
evitar los problemas que se tienen al calibrar la inductancia. La ecuación de puente
para este caso se convierte en:
Ru + jwLu = R2R3(1 + jwC1R1)/R1
De lo cual Ru = (r2/R1)R3
Lu = C2R2R3
Observemos que w no aparece en estas relaciones.
Ru puede representar la resistencia del alambre con inductancia Lu, algunos puentes
de Maxwell incluyen un selector para leer el factor de calidad de la bobina definido
por:
Qbobina = │ZL│/│ZR │ = wLu/Ru
Esta definición
corresponde
a Qser para una red resonante
conexión de la bobina en serie con un capacitor tal que w0 = w.
193
formada
por la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
UNIDAD 3: ANÁLISIS DE CIRCUITOS DE POTENCIA
CAPITULO 7: CIRCUITOS DE TRES FASES Y POTENCIA EN AC
LECCIÓN 1: POTENCIA EN CIRCUITOS AC
Potencia promedio
Fundamentalmente, el concepto de potencia relaciona la energía transferida. Cuando
una carga tiene una potencia instantánea p (t) sobre el intervalo de tiempo t1 a t2,
la energía total transferida a la carga durante este tiempo es:
t2
w=
∫ p(t )dt
t1
Nosotros definimos la potencia promedio P como
P=
t 2 − t1
w
1
t2 −
=
t2
∫ p(t )dt
t1
t1
La cual representa el valor promedio de energía transferida de t1 a t2.
Usualmente, nosotros necesitamos el promedio obtenido por extención de t2→∞
Pero cuando p(t) varia periódicamente, este no es en el estado estable.
Si se establece T para integrar como el periodo de p (t) tendremos:
w
P=
=
T
T t1
1
t1+T
∫ p(t )dt
194
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Este es el promedio
cualquier función periódica p(t) el cual tiene cuatro
propiedades significantes:
195
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El promedio es independiente del tiempo de inicio t1.
Cuando p(t) consiste de dos o mas componentes, el promedio de la suma es igual a la
suma de los promedios.
Si p (t) contiene una componente constante, entonces el promedio de estas
componentes es igual a la constante.
Cualquier componente sinusoidal t de p(t) tiene por valor promedio un valor de cero.
Para ilustrar estas propiedades consideremos
un caso particular pero
importante.
Supongamos que la potencia instantánea tiene la forma
P(t) = P0 + Pacos (nwt + Φ)
Esta función consiste de una constante mas un sinusoide con periodo 2Π/nw = T/n,
donde T = 2π/w. Entonces, de las propiedades previas esperamos que:
P =p0
Por lo tanto la potencia promedio es igual a la componente constante de p(t). Para
revisar el resultado obtenemos la suma de los promedios:
1
P=
T
t1+T
∫ [P0 + Pa cos(nwt + φ )]dt
t1
196
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 124 Formas de onda de potencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 297
Ahora considere un resistor con un circuito operando bajo las condiciones de estado
estable ac, como la representación en el dominio de la frecuencia del
diagrama de la figura 124a. Si I = Im ∠φi , entonces i(t) = Im cos (wt+ φ i) y la
potencia instantánea disipada por R es
pR(t)2 = Ri2(t) = rIm cos (wt+ φ i)
2
La figura 124b muestra la forma de onda de la corriente y potencia instantánea,
mostrando qu pR(t) se repite cada T/2 segundos cuando i(t) tiene un periodo T.
Nosotros también vemos de las excursiones verticales de pR(t) que la potencia
instantánea oscila entre pmax = RIm2 y pmin = 0. Por tanto las variaciones de pR(t)
son simetricas relativas a la línea puntada dibujada en el medio, tenemos que el valor
promedio es
pR = ½(pmax – pmin= = 1/2RIm2
Para verificar esto expandimos la ecuación anterior usando la identidad
trigonométrica
Cos2α = ½ + 1/2cos2 α
Asi
pR(t) = 1/2RI
2
[1 m+ cos(2wt + 2Φ )]
i
Esta expansión muestra que pR(t) consiste de una constante mas un termino
cosenoidal, asi la potencia promedio pR es igual a la componente constante
1/2RIm2. Nosotros también expresamos PR en términos de la amplitud de
voltaje observando que I = V/R así que Im = Vm/R. Esto es: PR = 1/2RIm2 = Vm2/2R
Esta expresión no da la potencia promedio disipada por cualquier resistor en
cualquier circuito ac cuando Im es la corriente pico a través de R o cuando Vm es el
voltaje pico que atraviesa R.
197
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 125a representa una red arbitraria de carga que incluye cualquier
∠ y la carga de la
número de elementos resistivos y reactivos. Si I = Im
φi
impedancia es Z = │Z│ ∠φ , entonces:
V = ZI = │Z│ Im ∠θ + φ i
v (t) = │Z│Im cos (wt + θ + φi )
Asi que
i(t) = Im cos(wt +
φi )
Figura 125 Red arbitraria de carga
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 298
Y
i
i
p(t) = v(t)i(t) =
│Z│Im2 cos (wt + θ + φ ) cos(wt + φ )
Al aplicar la identidad
Cos α cos β = ½ cos (α – β) + ½ cos (α + β)
De donde obtenemos más información con la relación
P(t) = 1/2 │Z│Im2 [cos θ + cos (2wt + θ + 2 φ )] Los valores extremos de p (t) son :
i
Pmax = 1/2 │Z│Im2 (cos θ + 1)
Pmin = 1/2 │Z│Im2 (cos θ - 1)
198
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 125b muestra la forma de onda de p(t) para el caso normal de 0 < │ θ │<
0
90 , así que pmin < 0 y la potencia instantánea tiene ambos valores positivos y
negativos. Fisicamente, la fuente suministra energía a la carga donde p(t) > 0,
donde la carga retorna energía atrás a la fuente cuando p(t) <
0- el retorno de energía es almacenada temporalmente en los elementos reactivos.
La potencia promedio liberada a la carga es igual al compente constante en la expresión
de potencia, esto es:
P = 1/2 |Zm|Im2 cos θ
Este valor precisamente se encuentra entre pmax y pmin. Pero │Z│ cos θ = Re [Z] =
R (w) y Im = Vm /│Z│, asi que nosotros escribimos:
P = 1/2R(w)Im2 =
R(w) 2
∠ 2
Vm
2Z
Esta ecuación permite directamente calcular la potencia disipada por todos los
resistores de la red.
Ejemplo: Calculos de Potencia AC
Figura 126 Calculos de Potencia AC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 299
La figura 126 muestra un circuito donde se tiene que
199
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Z = 4.8 + 6.4 k Ω
│V│= 80 V
│Vc│ = 40 V Ahora podemos calcular
las potencias promedios
La potencia promedio total suministrada por la fuente es encontrada mediante las
ecuaciones dadas con R(w) = 4.8 k Ω y Im = 10 mA asi que:
P = 1/2R(w) Im2 = ½ x 4.8 x 102 = 240 mW
Esta potencia es actualmente disipada por los resistores de 40 k Ω y 5 k Ω, y
nosotros colocamos │V│y │Vc│para obtener los valores individuales
P40 = 80/2 x 40 =
80 mW
P5 = 402/ 2 x 5 = 160 mW Esto es P40 + P5
= 240 mW = P
Valores RMS
La ecuación de potencia promedio frecuentemente tiene los valores de voltaje o
corriente en términos de sus valores efectivos s rms. Nosotros introducimos estos
conceptos aquí y entonces se aplican a los cálculos de potencia.
Considere una resistencia R que lleva una corriente variante en el tiempo i (t)
con periodo T. Por tanto p(t) = Ri2(t), la potencia promedia disipada es
t1+T
P=
1
p(t )dt
T∫
t1
t1+T
1
= R[ 2
T
∫i
(t )dt
t1
Pero si la misma resistencia lleva una corriente constante I, entonces p (t) es
constante y
P = RI2
Comparando las dos ultimas ecuaciones, nosotros vemos que i(t) produce la misma
disipación de potencia a una corriente constante I cuando
t1+T
I2 =
1 2
∫Tt1 i
(t )dt
198
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Por tanto I es el valor efectivo de i(t) con respecto a la disipación de potencia.
199
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El valor efectivo de cualquier corriente periodica i (t) es también llamada valor de
raíz cuadrada media o valor rms. Este nombre significa que la última
ecuación puede ser reescrita:
t1+T
Irms =
1 2
∫Ti
t1
(t )dt
Asi este valor es igual a la raíz cuadrada del promedio de la raíz de i(t). De la
misma manera el valor rms de un voltaje periódico v(t) es
t1+T
Vrms =
1 2
∫Tvt1
(t )dt
Para el caso ac con señales senoidales i(t) = Im cos ( wt + φi ) y v(t) = Vm cos (
wt + φi ). Las anteriores ecuaciones nos muestran que
Irms = Im/ 2
≈ 0.707 Im
Vrms = Vm/√2 ≈ 0.707 Vm
Estos valores son independientes de los angulos de fase φi
y φV .
La mayoría de los voltímetros y amperímetros son calibrados para valores rms, y
nosotros normalmente hablamos de voltaje y corriente rms suministrados por las
fuentes de potencia ac. El estándar residencial de los circuitos residenciales
normalemente es Vrms ≈ 120 V, asi que el valor pico de voltaje es Vm =
√2Vrms ≈ 170 V.
Para una impedancia dada podemos decir que: Vrms = │Z│Irms
Ejemplo: Valor RMS de una forma de onda rectificada media – onda
200
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 127: Señal de corriente rectificada media onda
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 301
La figura 127 dibuja una señal de corriente rectificada media – onda i(t) que se encuentra
en alguna fuente de potencia de alimentación. Esta forma de onda consiste de una señal
seno sin la parte negativa de la señal, asi que i(t) = Im sen wt para 0 ≤ t ≤ T/2 pero i
(t) = 0 para
T/2 ≤ t ≤ T. Podemos entonces determinar el valor rms correspondiente:
Tomando t1 = 0 y empleando la expansión sen2 α = ½ (1 – sen 2 α), se obtiene
T
2
I rms =
12
i (t
)dt
T ∫0
=
1
T
T /2
∫ IT msen
2
2
2πt
dt
0
Por tanto Irms = Im/2
Si la resistencia R lleva una corriente rectificada de media onda, entonces: PR = RIrms2 =
RIm2/4
Maxima transferencia de Potencia
Si se tiene una fuente de voltaje ac con una impedancia Zs, lo que buscamos es
investigar la potencia promedio P transferida a la carga son impedancia Z. Como se
muestra en la figura 128; donde ambas impedancias consisten de una resistencia ac mas
una reactancia, asi que nosotros tenemos
200
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Zs = Rs + JXs
Z = R + jX
201
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Si Irms denota la corriente rms, entonces la potencia de carga es
Figura 128 Potencia trasferida de la fuente a la carga
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 302
P = RIrms2
De la misma manera la potencia disipada por la fuente es
Ps = Rs Irms2
LA eficiencia de la potencia correspondiente transferida es
Eff = P / Ps + P = R/Rs+ R
Por tanto la eficiencia puede calcularse directamente de las resistencias ac. Pero
para determinar las condiciones de máxima tranferencia de potencia, nosotros debemos
expresar
P en términos de los valores rms. Por tanto I = V/(Zs + Z), Irms = Vrms /
│Zs + Z│ y
RV 2 rms
P=
Zs + Z
2
202
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Presumiblemente, Rs y ya sea Xs y X son fijos, mientras las otras dos componentes
son variables. Logicamente, la carga debe tener R > 0; de otra manera,
podría
absorver
la
potencia
de la fuente.
Bajo
esta
no
estas condiciones, podemos
concluir que el valor máximo de P ocurre cuando Xs + X
=0o
X = - Xs
Asi, X debe ser inductivo si Xs es capacitivo,
y viceversa. Por lo tanto los
componentes reactivos se cancelan – de manera similar a la resonancia serie – el
circuito equivalente se reduce a la fuente de voltaje en serie con Rs y R. Por lo tanto
se trata de un circuito puramente resistivo, la maxima transferencia de potencia
adicionalmente requiere que
R = Rs
Esta ecuación se consigue al igualar Xs + X = 0 y resolviento dP/dR = 0 para R. El
valor correspondiente de P es llamado la potencia máxima disponible, dada
por:
Pmax = V2rms/4Rs
Sin embargo cuando R =Rs se tiene que la máxima transferencia de potencia
corresponde a un 50 % de eficiencia, significa que la misma cantidad de
potencia es disipada en fuente y carga.
Ejemplo: Transferencia de potencia en un oscilador
Cierto oscilador de alta frecuencia tiene:
Zs = 6 + j8 kΩ = 10 kΩ ∠53.10
Vrms = 1.2 V
Si tenemos
libertad para conectar una impedancia de carga, entonces
podemos tomar:
Z = Zs* = 6 + j8 kΩ
Por lo tanto P = Pmax = 1.22/(4x6)
= 0.06mW = 60 µ W
203
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Pero si la carga tiene una relación fija X/R = -7/24, entonces debemos usar
Z = (24 – j7)c =25c ∠16.30
Donde c es una constante ajustable.
Se tiene que el valor optimo de │Z│ es │Z│= │Zs│. En este caso debemos tomar
25c = 10 kΩ
Entonces Z = 10 kΩ ∠16.30
= 9.6 - j2.8 kΩ
La potencia de carga es encontrada:
P = 9.6 x 1.22/(6 + 9.6)2 + (8 – 2.8)2
=
0.0511 mW = 51.1 µW La eficiencia
de tranferencia en este caso es Eff = 9.6/(6 + 9.6) ≈ 62 %.
LECCIÓN 2: SISTEMAS DE POTENCIA Potencia real y reactiva
Dos convensiones que comúnmente son usadas en ingeniería eléctrica
necesitan ser explicados.
La primera notación refleja el hecho de que los sistemas de potencia ac operan a una
frecuencia fija, la cual en los Estado Unidos usualmente es
W = 2π x 60 Hz ≈ 377 rad/s
Nosotros podemos por lo tanto ignorar el efecto de la dependencia con la
frecuencia y escribir la impedancia de carga como
Z = │Z│ ∠φ
= R + jX
Donde R = │Z│cos θ
X = │Z│sen θ
204
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La
figura
129
muestra
el
modelo
y
el
triangulo
de
impedancias
correspondiente. Este modelo serie es igual para una carga en paralelo o una
combinación de elementos en serie y paralelo.
Figura 129 Triangulo de impedancias
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 305
La
segunda
convensión
combina
la
notación
fasorial
con
los
valores
cuadráticos de la raíces expresando todas las magnitudes fasoriales en unidades
rms. Especificamente, para las terminales de voltaje y corriente fasorial de la figura
129b, nosotros escribimos:
│V│ = Vrms
│I│ = I rms
La ley de Ohm relaciona V e I por V= IZ porque se emplean valores rms para ambos
voltaje y corriente. Si nosotros tomamos el angulo Φv de la terminal de
voltaje como el fasor de referencia, entonces Φi = ∠I
= Φv -
Z
entonces:
V = Vrms ∠φ v
= ∠V /
I = Irms ∠φ v − θ
Sin embargo, los valores pico de las señales sinusoidales asociadas deben ser
calculadas mediante
205
θ,
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Vm = √2Vrms = √2│V│
Im = √2Irms = = √2│I│
206
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Tomando como base las expresiones de la lección anterior y si φi
= Φv - θ
entonces
P(t) = 1/2 │Z│Im2 [cos θ + cos (2wt +2 Φv - θ )]
Pero podemos sustituir 1/2 │Z│Im2 = │Z│Irms2
= VrmsIrms, y podemos
expandir cos(2wt + 2 Φv - θ) por medio de
Cos (α - β) = cos α cos β + sen α sen β
Asi p (t) = VrmsIrms cos θ [1 + cos2(wt + Φv)] + VrmsIrms sen θ sen 2(wt +
Φv)
Finalmente podemos obtener
P = VrmsIrms cos θ
Q = VrmsIrms sen θ
Y escribir p(t) = pR(t) + pX(t) Donde
PR (t) = P [1 + cos2(wt + Φv)]
px (t) = Q sen 2(wt + Φv)
Hemos aqui descompuesto p(t) dentro de dos components pR(t) y px(t) como se
muestra en la figura 130, donde Φv = 0.
207
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 130 Gráficas de potencia AC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 306
La componente pR(t) consta de una constante mas una senosoidal , asi el valor
promedio es
P = VrmsIrms cos θ = RIrms2
Asi el valor promedio de pR(t) es igual a la potencia promedio absorbida por la
resistencia de carga . Nosotros llamamos P la potencia real. Esta potencia es medida
en watios (W).
La otra componente de p(t) es px(t), la cual oscila de manera sinusoidal entre + Q
y
- Q y el valor tiene un promedio cero. En consecuencia, px(t) no contribuye a la
potencia promedio absorbida por la carga. De acuerdo con la figura 129 sen θ =
X/│Z│, asi que
208
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Q = Vrms Irms sen θ = XIrns2
209
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La presencia de X indica que px(t) representa el valor de energia intercambiada entre
la reactancia de la fuente y la carga. De acuerdo de esto, nosotros llamamos Q
la potencia reactiva. (No debemos confundir el simbilo Q usado aquí con el factor
de calidad definido en secciones anteriores). Para hacer énfasis en que la potencia
reactiva representa un almacenamiento
de energia mayor
que
la
potencia
transferida, nosotro representamos Q en voltio – amperios reactivos (VAr) .
Si la carga tiende a ser resistiva, entonces X = 0, Q = 0, y p(t) = pR(t). Pero si la carga
tiende a ser enteramente reactiva, entonces R = 0, P = 0 , y p(t) = px(t). En el caso
de un inductor simple con una corriente rms │IL│, el voltaje rms
│VL│, y X = wL . La ultima ecuación se convierte en
QL = wL│IL│2 = │VL│2 /wL
De manera similar, en el caso de un capacitor simple con X = -1/wC. QC = │Ic│2 / wC =
-wC│VC│2
El valor negativo de Qc significa que las formas de onda px(t) son inversas a la
figura 130. De manera mas general, una carga con una reactancia inductiva
(X>0) tiene Q > 0, mientras una carga capacitiva son reactancia (X<0) tiene Q <
0. Podemos decir entonces que la carga inductiva “consume” potencia reactiva mientras
un capacitor de carga “produce” potencia reactiva
Ejemplo: Eficiencia de Tranferencia de potencia
Figura 131 Eficiencia de Tranferencia de potencia
207
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 307
El diagrama de la figura 131 muestra un carga paralela RC conectada
a un
generador de voltaje ac con Vrms = 300 V. La fuente combinada y la resistencia
del alambre son representadas por Rs = 2Ω. Nosotros necesitamos encontrar la
corriente resultante rms, la potencia real y reactiva, y la eficiencia de la potencia
transferida.
La impedancia de carga es ZRC = (-j10)║20 ¨= 4 – j8Ω , asi la fuente ve una
impedancia total
∠ − 53.10
Z = Rs + ZRC = 4 – j8Ω = 10 Ω
Por tanto Irms = Vrms/│Z│ = 300 V / 10 Ω = 30 A, También tenemos que: P = 6 x
302 = 5400 W = 5.4 kW
Q = (-8) x 302 = -7200 Var = -7.2 KVAr
La potencia disipada por Rs es Ps = RsIrm
2
s
= 1.8 kW y la carga recibe PL =
2
Re[ZRC] x Irms = 3.6 kW. La eficiencia de la potencia transferida es igual a la razón:
PL /P = 4/(2 + 4)
≈ 67% Una eficiencia pobre.
Pero suponga que la reactancia
asi que Irms = 300 V/(2 + 20)Ω
capacitiva puede ser desconectada de la carga
=
13.6 A. Entonces las perdidas del calor óhmico
pueden generar RsIrms2 = 372 W mientras la potencia de carga se
puede incrementar ligeramente a RIrms2 = 3.72 W. La eficiencia se convierte
entonces en
PL/P = 20/(2 + 20) ≈ 91 % Y una considerable mejora.
Potencia compleja y factor de potencia
208
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El producto del voltaje rms y la corriente en las terminales de la carga es
llamada la potencia aparente, expresada en voltio – amperios (VA). De la misma
manera la cantidad VrmsIrms es fácilmente medida con la ayuda de medidores
simples ac, esto no es necesariamente igual a la potencia actual
absorbida por la carga. En vez de esto, nosotros podemos demostrar que P2 +
Q2 = (VrmsIrms)2 cos2θ + (VrmsIrms)2sen 2θ = (VrmsIrms)2 o
VrmsIrms =
P2 + Q2
La forma de esta ecuación sugiere una relación triangular entre la parte real,
reactiva y la potencia aparente.
Para desarrollar la figura geométrica, nosotros usamos el complejo conjugado del
fasor de corriente, nominalmente,
I* = (Irms ∠φv − θ )* = Irms ∠θ − φ v
Por tanto V = Vrms ∠φv , multiplicando V por I* eliminamos φv
y los
denominamos potencia compleja
S = VI* = VrmsIrms ∠θ
Asi en la forma rectangular:
S = VrmsIrms cos θ + j VrmsIrmssenθ = P + jQ
La parte real de la potencia de la misma manera es igual a Re[S] y la potencia
reactiva es igual a Im[S].
209
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 132 Triangulo de impedancias
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 309
La figura 132 nos muestra el plano complejo resultante conocido como
triangulo de potencias, un triangulo recto con hipotenusa con longitud:
│S│ =
P2 + Q
= VrmsIrms
2
El triangulo tiene exactamente la misma forma que el triangulo de impedancias de la
figura 129b, porque:
S = P + jQ = RIrms2 + jXIrms2 = ZIrms2
En consecuencia el triangulo de potencia es igual al triangulo de impedancias
multiplicado por Irms2.
Una importante propiedad de la potencia compleja es la ley de conservación, la cual
establece que:
Cuando grandes cargas están conectadas a la misma fuente, la potencia total compleja
de la fuente es igual a la suma de las potencias complejas
individuales.
210
de las cargas
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Por lo tanto, si se tiene dos cargas s1 = P1 + jQ1 y S2 = P2 + jQ2, respectivamente,
entonces la fuente debe suministrar
211
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
S = S1 + S2 = (P1 + P2) + j(Q1 + Q2)
La parte real de la ecuación anterior ecuación están relacionadas con la observación
familiar de que una lámpara de 60 W y 100 W están conectadas a la misma fuente,
entonces la fuente debe suministrar una potencia P = 60 +
100 = 160 W. Y el mismo efecto de suma se tiene en la potencia reactiva.
Las cargas que consumen
largas cantidades de potencia frecuentemente se
caracterizan en términos del factor de potencia, definido por:
Pf = P/│S│ = cos θ
Claramente, el factor de potencia de una carga pasiva siempre se encuentra en el rango
de 0 ≤ pf ≤ 1 desde que P ≥ 0 y
│S│ ≥
P. El factor de potencia unitario
simplemente significa que │S│ = P, lo cual ocurre cuando Q = 0 y θ =
0.
Si manipulamos la magnitud de la potencia reactiva podemos escribir
Q = +/-
S2 - P
2
= +/│S│
1 - pf 2
Ejemplo: Diseñando una corrección del factor – de potencia
Figura 133
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 311
212
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 133a representa una planta industrial con un capacitor en paralelo
diseñado para corregir el factor de potencia. La planta opera con una fuente de
500 Vrms a 60 Hz y la planta consiste de dos cargas teniendo:
P1 = 48 kW
pf1 = 0.60 atrasado
P2 = 24kW
pf2 = 0.90 adelantado
De estos datos inferimos que la carga 1 es altamente inductiva, mientras que la carga 2
es principalmente capacitiva. El capacitor a adicionar debe incluirse para
el
factor
de
potencia
de
la
planta.
Primero
usamos
corregir
la conservación de la
potencia compleja y el triangulo de potencias para combinar las dos cargas. Entonces
determinamos el valor de C necesario para obtener el factor de potencia unitario.
La potencia aparente y reactiva para la carga 1, la encontramos mediante:
│S1│= 48 kW / 0.6 = 80 kVA
Q1 = +
80 2 48 2
= +64kVAr
Donde nosotros conocemos que Q1 > 0 porque pf1 esta en atraso. La corriente rms
que conduce esta carga es
│I1│ = 80 kVA/500 V = 160 A
De manera similar para la carga 2 encontramos que:
│S2│ = 25 kVA
│I2│= 50 A
Q2 = -7kVAr
Observe que podemos construir el triangulo de potencia como se muestra en la figura
133b con
P12 = P1 + P2 = 72 kW
Q12 = Q1 + Q2 = +57kVAr
Asi que
│S12│ =
72 2 + 57
= 91.8 kVA
2
213
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
│I12│ = 91.8 kVA / 500 V = 184 A
214
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Asi que pf12 = P12/│S12│ = 0.784, esl cual esta aun en atraso de Q12 > 0.
Usted debe observar con cuidado estas cantidades y adicionar directamente (P y Q) .
Las dos ultimas líneas de la tabla pertenecen a la corrección del factor de potencia
usando un capacitor ideal con PC = 0 y Qc = -57 kVAr. El valor correspondiente de
C puede ser calculado:
C = -Qc / w │Vc│2 = 605 µf
Por tanto │Vc│ = │V│ = 500V y w = 377 rad/s.
La planta entera con el factor de potencia corregido tiene: P = P12 + Pc = 72 kW
Q = Q12 + Qc = 0
Asi que pf = 1 y │S│ = P . De acuerdo con esto, la corriente rms de la fuente puede
ser
Irms = │I│ = 72 kvA / 500 v = 144 A
Figura 134 Diagrama fasorial
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 313
215
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El diagrama fasorial de corrientes de la figura 134 muestra las corrientes del
factor de potencia corregido. Este diagrama es construido tomando c = 0, asi
que ∠I
= 0 (por tanto la planta corregida es puramente resitiva),
donde
+900. Note que I = Ic + I12 y I12 = I1 + I2 , donde ∠I1 < 0 mientras que
∠Ic =
∠I 2
> 0.
LECCIÓN 3: CIRCUITOS TRIFASICOS BALANCEADOS
Un sistema de potencia de alimentación que solamente cuenta con una fuente ac es
llamado un circuito de un angulo de fase simple (1 – Φ). En grandes niveles de
potencia, el comportamiento oscilante de la potencia instantánea es un circuito de una
fase simple no es el optimo. Los circuitos polifásicos con multiples fuentes fueron
desarrollados en respuesta a este problema.
La configuración mas común polifásica es el circuito de tres fases balanceado (3 –
Φ), el cual tiene un arreglo de tres fuentes para lograr la potencia instantánea
constante. Como un mayor beneficio, este tipo de circuito libera más vatios por
kilogramo de conductor
que un circuito equivalente
de fase simple. Por estas
razones la mayoría de generadores de potencia eléctrica, la distribución y el consumo
se realiza por medio de sistemas de tres fases.
Fuentes de tres fases
216
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
217
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 135 Generador trifásico
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 316
La figura 135a muestra los componentes esenciales de un generador de tres fases. El
marco estacionario o estator tiene tres bobinados idénticos igualmente espaciados
alrededor de al interior de una superficie cilíndrica separados por
3600/3
=
1200. El rotor, rota dentro del estator con un valor de f = w/2π
revoluciones por segundo. Una turbina de vapor o algún otro elemento de movimiento
provee la energía mecánica necesaria para rotar el rotor.
Cada vez que el rotor pasa por cada bobinado, el campo magnetico induce un voltaje
sinusoidal con una frecuencia w y un valor rms Vф,. Si nosotros tomamos va(t)
como el fasor de referencia, entonces vb(t) y vc(t) difieren solamente por 1200 de fase y
:
Va(t) =
2 Vф cos wt
Vb(t) =
2 Vф cos (wt – 1200) Vc(t) =
2 Vф cos (wt + 1200)
Las formas de onda se muestran en la figura 135b.
Las ultimas ecuaciones definen un grupo de ecuaciones simetricas de tres fases
con la secuencia de fase a- b – c. La secuencia de fase indica la secuencia de
tiempo de los picos de las formas de onda, y nosotros podemos asumir una secuencia
total a – b –c. A pesar de la secuencia de fase, la suma de todos los voltajes es
Va (t) + vb(t) + vc ( t) = 0
Esto se cumple para cada instante de tiempo. Esta propiedad puede inferirse de las
formas de onda de la figura 136b. Esto se prueba de la siguiente relación trigonométrica
Cos α + cos (α – 1200) + cos (α + 1200) = 0
218
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Para cualquier ángulo α.
Figura 136 Circuito de tres fases
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 317
Consideremos el circuito de tres fases de la figura 136 Aquí, cada bobinado del
generador es representado por el símbolo de una fuente, y la referencia de las
terminales se suman al nodo n, llamado neutral. Las restantes terminales de las tres
fuentes y el neutro son conectados por cuatro alambres a una carga consistente de tres
resistores iguales unidas juntas a un punto de carga neutral N. Tales cargas tienen
tres ramas idénticas ques son llamadas a ser balanceadas.
Con un vistazo rápido. La figura 136 muestra tres circuitos de angulos de fase simple
con un alambre neutro común a los tres. Pero observemos que la carga conduce ia (t)
= va(t)/R,
ib (t) = vb(t)/R, y ic(t) / R, asi que las tres corrientes también forman un
grupo de corrientes simetricas de tres fases. Por tanto, la corriente total instantenea que
va a través del alambre neutral es
In(t) = -[ia(t) + ib(t) + ic(t)] = - [va(t) + vb(t) + vc(t)] / R = 0
219
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Desde que in (t) = 0 cuando la carga es balanceada, el conductor neutro puede ser
omitido. El circuito de tres fases sin embargo necesita tres alambres desde el generador
a la carga.
La potencia instantánea es suministrada a la carga mediante la corriente ia(t)
2
es pa(t) 2= Ria (t) = va (t) / R . La figura 137 muestra estas formas de onda de
2
2
pb(t) = vb (t)/R y pc(t) = vc (t)/R. Usando adiciones punto a punto, se puede
encontrar la potencia total transferida desde el generador a la carga como: P (t) = pa(t)
+ pb(t) + pc(t) = 3VΦ/R
Figura 137 Formas de onda de la potencia instantánea
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 318
Observe que p(t) tiene una valor constante. Tengamos en cuenta que:
- Un circuito de tres fases requiere menos conductores que tres circuitos de una fase
manejando la misma potencia total.
- La potencia total instantánea es constante.
220
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 138 Generador estrella
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 318
Tomemos como base el diagrama de la figura 138 nombrado como un generador
estrella (Y).El punto neutral puede o no puede ser externamente disponible, se
llamara este punto como tierra. El generador esta marcado con dos grupos de
fasores de voltaje, los voltajes de fase Va, Vb, y Vc , definidos con respecto al
neutro; y los voltajes de línea Vab, Vbc, y Vca,
definidos atraves de un par de
terminales. Consistente de las notaciones de doble subíndice, los voltajes de línea
son realacionados a los voltajes de fase por medio de:
Vab = Va - Vb
Vbc = Vb – Vc
Vca = Vc - Va
El nombre voltaje de línea refleja el hecho que Vab, Vbc, y Vca aparecen entre los
alambres o “líneas” conectadas al generador de carga. Estos voltajes son fácilmente
medidos, y los generadores de tres fasos son comúnmente relacionados en términos
de voltaje de línea porque los
voltajes de fase pueden ser medidos solamente
cuando el punto neutral es accesible.
Pero los voltajes de fase de un generador estrella corresponden directamente a los
voltajes de fuente. De acuerdo con esto, nosotros llamamos VΦ al fasor rms de voltaje,
y podemos escribir entonces las expresiones:
221
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Va = VΦ ∠0
Vb = VΦ ∠ − 120
Vc = VΦ ∠120 0
0
Figura 139 Diagrams fasoriales trifásicos
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 319
La figura 139b revela de manera inmediata que
∠V
=
300. Entonces,
ab
tomando |Vab| = V1, el triangulo de la derecha muestra que: V2Φ = (Vl/2)2 + (VΦ/2)2
Resolviendo par Vl tenemos el voltaje rms de línea: Vl =
3 VΦ ≈ 1.73 VΦ
Por simetría, los otros voltajes de línea tienen el mismo valor rms pero variando
+/- 1200 con respecto a Vab. Así que :
Vab = Vl ∠30 0
Vbc = Vl ∠ − 90
Vca = Vl ∠150 0
0
La figura 139c nos muestra las relaciones entre los voltajes de línea y la fase.
Claramente Vab + Vbc + Vca es igual a cero. También podemos confirmar que Va
+ Vb + Vc = 0.
222
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 140 Conexión trifásica
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 320
Los devanados de las tres fases pueden ser conectador como se muestran en la
figura 140, llamado un generador delta ( ∆). Los voltajes de línea son igual a los
voltajes de fuente aquí, pero nosotros continamos usando Vl para el voltaje rms de
línea. El punto neutro y los voltajes de fase no existen físicamente en el generador. Sin
embargo, el punto equivalente neutro y los voltajes de fase son definidos
por el
diagrama fasorial acompañante, donde Vab ha sido tomado
como referencia. Asi que Vab = Vl ∠0 0 , Va = (Vl/ 3 ) ∠ − 30 0 .
Un generador delta actua externamente
de manera similar a un generador de tres
terminales estrella con los mismos voltajes rms de línea. El generador Delta
difiere externamente del generador estrella por la ausencia del `punto neutro y la
presencia de una malla delta. Teoricamente, en la malla interior la corriente I∆ es igual
a cero porque Vab + Vbc + Vca = 0. Sin embargo, cualquier desviación de las
condiciones
de voltaje
puede
producir
una circulación de corriente inesperada.
En consecuencia los generadores delta son usualmente encontrados solamnente en
aplicaciones especiales.
Ejemplo: Calculo de los Voltaje de línea:
220
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Se necesita encontrar vab(t), vbc(t) y vca(t) para un generador de tres fases con Va
= 15 kV(rms) ∠90 0 en una secuencia a-b-c.
Solución:
Si se tiene VΦ = 15kV, el voltaje rms de línea es: Vl =
Entonces de la figura 140 c. ∠V ab =
y ∠V ca =
∠V
∠V
+ 1200
=
ab
Vab = 26kV ∠120 0
3 15 kV ≈ 26 Kv (rms)
∠V
+ 300, ∠V bc
∠V
a
=
ab
2400
- 1200,
asi que :
ab
Vca = 26kV ∠ − 120 0
Vbc = 26kV
∠0 0
Finalmente, convirtiendo a voltajes pico
2 x 26kV
=
36.8 kV, nosotros
obtenemos:
vab (t) = 36.8 cos (wt +1200)kV
vbc (t) = 36.8 cos wt kV
vca (t) = 36.8 cos (wt -1200)kV
Cargas balanceadas estrella:
Una carga de tres fases consiste de tres ramas de impedancia. Estas ramas
corresponden a tres disposistivos separados tal como un motor con tres devanados.
Cuando las impedancias son conectadas en una configuración estrella similar a la
figura 141 estas forman una carga estrella. La carga es
balanceada si cada rama tiene la misma impedancia ZY = |ZY| ∠θ .
221
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 141 Cargas balanceadas estrella
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 322
La condición de balanceo tiene importancia
instantánea
práctica porque la potencia total
a la carga puede ser constante, incluso cuando la carga incluye
elementos que almacenan energía como también resistencias. En consecuencia,
las cargas de tres fases son usualmente diseñadas para ser balanceadas.
La
simetría de la condición de balanceo simplifica el trabajo porque:
Un circuito de tres fase con una carga estrella balanceada puede ser analizada usando
un circuito equivalente para simplemente una fase.
Nosotros desarrollamos esta técnica para encontrar las corrientes y potencias promedio
para una carga estrella. Entonces podemos confirmar que la potencia total instantánea
es constante.
Para propósitos de análisis, nosotros asumimos que las líneas de un generador son
conductores ideales. Tambien se asume que un generador estrella cuyo punto
netural es conectado a la carga neutral N a través de un conductor ideal indicado por la
línea puntada. La figura 141b nos muestra que VNa = 0 y el voltaje de fuente Va
aparece a través de la rama de impedancia, asi que Ia = Va/ZY. Los diagramas para
las otras dos fases pueden ser idénticas excepto
222
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
por los subíndices sobre los voltajes y las corrientes. Nosotros asi deducimos los
diagramas de fase que:
Ia = Va/ZY
Ib = Vb/ZY
Por tanto |Ia| = |Ib| = |Ic|
Ic = Vc/ZY
= VΦ / |ZY|
y VΦ = Vl /
3 , todas las líneas llevan
la misma corriente rms dada por:
Il =
Vφ
Vl
3 ZY
=
ZY
Entonces tomando ∠V a
I a = Il ∠ − θ
= 00, nosotros tenemos:
Ic = Il ∠120 0 − θ
Ib = Il ∠ − 120 0 −
θ
La figura 141c nos muestra el diagrama fasorial para las líneas de corriente y voltaje.
El alambre neutro no lleva corriente y este podría ser eliminado de la figura. De la
misma manera la simetría nos lleva a que:
VNn =
0
Ya teniendo determinados
los voltajes y corrientes, necesitamos encontrar la
potencia de carga. Cada fase tiene un voltaje rms VΦ, una corriente rms Il, y una
impedancia ZY, asi la potencia reactiva y real por fase son:
2
PΦ = Re [ZY]Il = VΦIlcosθ
QΦ = Im [ZY]Il2 = VΦIlsenθ
Ya que el generador tiene tres fases identicas, la potencia total real y reactiva del
generador son:
P = 3 PΦ = 3 VΦIlcosθ =
3 VlIlcosθ
Q = 3 QΦ = 3 VΦIlsenθ =
3 VlIlcosθ
223
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Tengamos en cuenta que nosotros tomamos 3 VΦ =
3 Vl. La potencia total
aparente es:
P2 + Q
|S| =
=
3 VlIl
2
De donde pf = P/|S| = cosθ
Entonces el factor de potencia para las tres fases es exactamente igual al factor
de potenica de una impedancia de una rama simple.
De la misma manera la potencia instantánea
cada rama exhibe el mismo
comportamiento oscilante encontrado para un circuito de una fase, la potencia total
instantánea puede ser constante. Entonces tenemos que:
P(t) = va(t)ia(t) + vb(t)ib(t) + vc(t)ic(t)
Donde va(t) =
2 VΦcoswt,
ia(t) =
2 Ilcos(wt – θ), y los otros
voltajes y
corrientes tienen un desplazamiento de fase de +/-1200. Asi que:
P(t)
=
2VΦIl [coswt cos(wt – θ)
+ cos(wt – 1200) cos(wt - 1200 - θ)
+ cos(wt + 1200) cos(wt + 1200 - θ)]
= VΦIl [3cos θ + cos(2wt – θ)
0
0
+ cos(2wt – θ - 120 ) + cos(2wt – θ + 120 )
Donde tengamos en cuenta que cos(2wt – θ +/- 2400) = cos(2wt – θ -/+
1200) .
Los últimos tres términos de esta expresión suman cero, dejando el valor
constante:
P(t) = 3VΦIl cosθ = 3PΦ = P
Si ZY = R, entonces θ = 0, Il = VΦ/R, y p(t) = 3VΦ2/R.
224
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 4: CIRCUITOS TRIFASICOS DESBALANCEADOS Cargas
Compuestas:
Las fuentes de tres fases frecuentemente suministran la potencia para cargas de una
fase simples a los largo de cargas de tres fases balanceadas. Nos referimos a
esta situación como una carga compuesta.
Figura 142 Carga compuesta
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 331
La figura 142 nos muestra una carga
compuesta simple con una impedancia de
carga de una fase Zcn concectado a la línea neutral. Si los alambres tienen una
impedancia despreciable, entonces los voltajes a la carga de las tres fases permanecen
inalterados por la carga de la fase sencilla, y visceversa. Nosotros podemos sin
embargo usar los métodos previos para encontrar IA, IB y IC, y conocemos que IN = 0.
Asi, las corrientes del generador son:
Ia = IA
Ib = IB
Ic = IC + Ica
Ia = -Ica
Donde Ica = Vc/Zca
Argumentos similares se tienen cuando hay dos o mas cargas de una fase, lo cual
225
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
puede ser concectada a una línea neutra o línea a línea. La potencia real
226
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
P y la potencia reactiva Q son calculadas por suma de las potencias de fase simple a
la potencia de cargas de tres fases. El factor de potencia difiere del factor de
potencia de tres fases de carga por si mismo.
Cargas debalanceadas estrella y delta
Ocasionalmente, una carga balanceada de tres fases se convierte en desbalanceada
porque una de las ramas ha desarrollado una falla de circuito abierto. Por tanto la
falla elimina un paso de corriente. Tales casos son fácilmente analizados por la
aplicación directa de la aplicación de las leyes de Kirchhoff’s a el diagrama resultante
en el dominio de la frecuencia.
El análisis de cargas estrella debalanceadas requieren especial atención en la
presencia o ausencia del puento neutro.
Figura 143 Circuito desbalanceado
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 332
Consideremos el circuito desbalanceado de cuatro alambres de la figura 143a. La
conexión a neutro es solamente posible con un generador estrella, pero el camino
puede ser indirectamente dirigido via tierra al generador y la carga. Si todos los pasos
226
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
de corriente tienen impedancia cero, entonces la conección
227
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
neutro es seguramente VNn = 0 y el correspondiente voltaje de fase aparece a través
de cada rama de impedancia. Por tanto:
Ia = Va/Za
Ib = Vb/Zb
Ic = Vc/Zc
Y
In = -(Ia + Ib + Ic)
Donde uns sistema balanceado debe tener In = 0.
Consideremos el circuito de tres alambres en la figura 143b. Aquí la tierra es flotante el
punto neutro N forza a Ia + Ib + Ic = 0. Pero los voltajes de fase no aparecen a
través de las ramas de impedancia, asi nosotros trabajaremos con las corrientes de
malla.
Especificamente si I1 =
Ia
y
I2
=
- Ic, podemos escribir la matriz de
ecuaciones de malla:
Za + Zb
− Zb
I1
− Zb
Zb +
Zc
I2
=
V ab
Vbc
Despues resolviendo para I1 y I2 nosotros calculamos las corrientes de línea: Ia = Ia
Ib = I2 - I1
Ic = -I2
El voltaje a las cargas neutrales son determinadas por cualquiera de las tres
fases por medio de:
VNn = Va - ZaIa
=
Vb - ZbIb =
Vc - ZcIc
Un sistema balanceado tiene por tanto VNn = 0.
El efecto de las impedancias del generador y /o las impedancias de línea
pueden ser incorporadas en las ecuaciones anteriores.
Los circuitos con cargas desbalanceadas delta no tienen una conección neutra, y las
228
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
ramas de corriente son fácilmente calculadas cuando conocemos los
229
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
voltajes de línea que aparecen directamente a través de las impedancias de rama.
Asi tomando la figura 144 nosotros tenemos:
Figura 144 Carga delta desbalanceada
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 333
Iab = Vab / Zab
Ibc = Vbc/Zbc
Ica = Vca/Zca
Y
Ia = Iab - Ica
Ib = Ibc -
Iab
Ic = Ica - Ibc
Todos son obtenidos por inspección del diagrama.
Pero el problema se vuelve mas complicado
cuando un generador
y /o las
impedancias de línea causan una caída de voltaje. Como se representa en la figura
143a. Nosotros desarrollaremos esta configuración mediante la llamada transformación
delta a estrella revisada en la lecciónes anteriores para circuitos resistivos. En nuestro
presente contexto, la carga delta desbalanceada puede ser convertida a una carga
equivalente estrella cuya impedancia de rama en las terminales A, B y C esta dada por:
230
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Z AB Z
ZA =
CA
∑Z
ZB
=
Z BC Z
AB
∑Z
Z CA Z BC
ZC
=
∑Z
Figura 145 Carga desbalanceada delta
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 334
Donde
∑Z
= ZAB + ZBC + ZCA
Para el caso especial de un circuito delta balanceado, ZAB = ZBC = ZCA = Z∆ y
∑ Z = 3 Z∆, asi que la ultima ecuación se reduce a ZY = Z∆
/3.
Para circuitos delta desbalancedos como en la figura 145a nosotros usamos las
anteriores ecuaciones para encontrar el equivalente desbalanceado estrella, como
se muestra en la figura 145b. El sistema resultante desbalanceado
terminales es analizado entonces aplicando Za = ZaA + ZA, etc
231
de tres
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ejemplo: Calculos para una carga Delta desbalanceada:
232
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Supongamos el circuito de la figura 145 a que tiene los siguientes parámetros: Vl = 900
V
ZaA = ZbB = ZcC = 5Ω
ZAB = 30 Ω
ZBc = 60 + j60Ω
ZCA = j30Ω
Nosotros necesitamos encontrar las corrientes de línea y la potencia total real y
reactiva suministrada por un generador.
Primero nosotros usamos las transformaciones delta – estrella con
∑ Z = 90 +
j90 para obtener:
ZA = 5 + j5 ZB = 20 + j0 Zc = 0 + j20
Adicionando la resistencia en serie de 5Ω en cada línea se obtiene la
impedancia total equivalente estrella
Za = 10 + j5
Zb = 25 + j0
Zc = 5 + j20
Despues, nosotros tomamos Vab como el fasor de referencia:
Vab = 900 V ∠0 0
= 900
Vbc = 900 V ∠ − 120
= -450 – j780
0
Entonces tenemos
35 + j5
− 25
I1
− 25
30 + j
20
I2
=
900
− 450 − j780
De lo cual I1 = 4.6 –j16.8 y I2 = -26.2 -j22.5 asi que tenemos:
Ia = 4.6 - j16.8
= 17.3 A ∠ − 74.5 0
Ib = -30.8 - j5.7
= 31.3 A ∠ − 169.4 0
Ic = 26.2 - j22.5
= 34.5 A ∠40.7 0
230
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Finalmente nosotros calculamos las potenicias totales reales y reactivas,
directamente como:
P = Ra|I
|2
a
+ Rb|I b
|2
+
Rc|Ic|2
= 33.5 kW
231
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Q = Xa|I
|2
a
+ Xb|I b
|2
+
Xc|Ic|2
= 25.4 kVAr
El angulo de impedancia de la carga total no es definido para el caso de
desbalance porque cada rama tiene un angulo de impedancia diferente. De
toda manera tenemos que el factor de potencia equivalente esta dado por:
Pf = P /
P2 + Q
= 0.79
2
LECCIÓN 5: CABLEADO Y CIRCUITOS RESIDENCIALES Voltaje – dual y
entrada de servicio
Las mayoría de las casas en los Estados Unidos tienen un voltaje dual ac
suministrado por un cable de entrada de tres líneas similar a el de la figura
146a. Una línea, llamada neutra, es conectada a la tierra. Los otros dos puntos
marcados como B y R, son”vivos” en sentido de que estos tiene un potencial sinuidal
con un pico de 170 V relativo al potencial de tierra, con una sinusoide invertida en
polaridad comparada con la otra. Las dos fuentes muestran actualmente correpondencia
a la salida de un transformador conectado a una línea de potencia de tres fases.
232
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 146 Cable de entrada de tres líneas
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 336
De manera formal, nosotros escribimos vB = 170 cos wt y vR = - vB = 170 cos(wt
+/- 1800), con valores rms VB = 170/
2 = 120 V. El voltaje línea a línea es entonces
vBR = vB – vR = 340 cos wt, somo se muestra en la figura 146b, y
este tiene un valor rms de vBR = 340/ 2 = 240 V.
Despues pasando a través de un mdidor eléctrico que realice la medición de la energía
consumida, las terminales de los cables de entrada se introducen en el panel principal.
Alli, las líneas vivas son conectadas a cicuitos individuales para iluminación, y otras
aplicaciones, mientras el neutro es conectado a una varilla y es entonces incorporado
bajo tierra del lugar.
233
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 147 Panel principal
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 337
La figura 147 muestra el diagrama de un panel principal con breakers sirviendo de
punto
de
union
concectando
interruptores
y
protecciónes
contra
sobrecargas. Los modernos tacos magnetico-termicos son un interruptor que tiene
un elemento bimetálico que se abren bajo pequeños pero continúas sobrecargas,
una bobina magnetica
y
que cambia el interruptor instantáneamente bajo fuertes
sobrecargas. (Los antiguos equipos tenían interruptores separados y fusibles).
La figura también muestra cuatro tipos diferentes de circuitos después del panel.
Cada circuito tiene un minimo de tres alambres, y estos están marcados de acuerdo
con el esteandar de colores:
Vivo = negro o rojo
234
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Neutro = Blanco
Ground = Verde
Todos los cables de salida vivos deben ser conectados a fusibles, de todas formas
los cables neutros y tierra deben ser atados a la tierra a la varilla neutra.
Cableado y aterrizamiento
Figura 148 Cableado y sus resistencias
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 338
La figura 148 muestra el cableado y las resistencias de los alambres de un panel
a 120 V aterrizado a la saiida. Varias salidas y bombillas son comúnmente
conectadas en paralelo al mismo circuito. Bajo condiciones normales, la corriente fluye
a la carga a través de solamente los cables de vivo y neutro. Por tanto, la terminal
de tierra en la salida tiene cero voltios con respecto a la tierra física, depreciando
la resistencia RG. Sin embargo, una corriente I a través de Rw y RB causa que la
terminal neutra se encuentre a RwI voltios con respecto a la tierra física, y el voltaje
de carga real se vuelve
234
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
120 – (Rw – RB)I. La resistencia en el cable de entrada incrementa este efecto
235
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
de carga aun mas, asi las aplicaciones domesticas son usualmente diseñadas para
operar sobre un rango de 110 a 120 V.
Desde el punto de vista de un ingeniero electrónico, el cable de tierra suministra
una referencia de potencial para mediciones de voltaje, independientemente del neutro.
Grandes corrientes pueden causar serias consecuencia. El nivel de voltaje lo tomamos
cuando nosotros tomamos la resistencia del cuerpo, cuyos rangos están alrededor
de 500 kΩ con la piel seca y 1 kΩ con la piel humeda. Asi una persona con la piel
humeda pude ser electrocutada con voltajes ac de menos de 100 V.
Figura 149 Aplicaciones residenciales de aterrizamiento
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 338
236
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ahora supongamos que usted toca el marco metalico de una aplicación desaterrizada
que tiene una falla interna en el alambre entre el marco y la línea viva, como se muestra
en la figura 149a. Su cuerpo entonces suministra un posible paso conductivo hacia la
tierra, y usted puede experimentar un serio shock – especialmente si usted se
encuentra sobre un piso de concreto húmedo o otra superficie de tierra que permita
el paso de corriente a través de su pecho. El taco del circuito no ofrece ayuda en esta
situación, porque esta diseñado para proteger el circuito – no a usted – contra
corrientes que excedan
15 A o más.
Una conexión interna de el marco a el neutro significantemente mejora la situación, pero
aun es mejor el aterrizamiento del marco como se muestra en la figura 149b. Este
arreglo mantiene el marco a el potencial de tierra aun con una falla en el cable, o como
mucho, unos pocos voltios de la tierra si resultan fallas en corriente a través del
alambre de tierra. Pero la mejor posible conección de protección es el circuito con
interruptor de fallas de tierra (GFCI) mostrado en la figura 149c. El GFCI tiene una
bobina sensor alrededor de los almabres vivo y neutro, y cualquier corriente de fallas
de tierra que resulten en un desbalance de |IB - Iw| > 5 mA induce una corriente
en al bobina sensor que abre el circuito. El GCFI puede ser localizado en una
salida, o puede ser parte del circuito de un taco en el panel principal.
La figura 150 muestra el diagrama de un cableado residencial involucrando 240
V:
a) Un voltaje de carga de 240 V, tal como un calentador de 240 V
b) Una carga dual de votaje en un rango eléctrico de 120 V a 240 V
c) Un circuito de tres terminales con dos cargas de 120 V compartiendo el neutro común
y los alambres de tierra.
En el ultimo caso Iw = IB – IR y la corriente por el neutro puede ser pequeña si la
cargas son casi iguales. Por lo tanto el cable neutro no necesita ser mayor que los
cables vivos.
237
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Finalmente la figura 151 muestra como una lámpara o cualquier otro dispositivo
puede
ser
controlado
independientemente
de
las
dos diferentes localizaciones
usando un interruptor de polo – simple y doble
– tiro (SPDT), comúnmente conocido como un interruptor de “tres caminos”. El
alambre vivo es conmutado entre dos “caminos” al primer interruptor y dede el camino
de la lámpara
al segundo.
De la misma manera, nosotros tnemos un circuito
completo solamente
Figura 150 Diagrama de un cableado residencial
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 340
Cuando ambos interruptores están arriba o abajo y volteando cualquier interruptor o
abriendo el circuito. Se puede controlar tres o mas localizaciones
237
usando
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
interruptores
de
“cuatro
caminos”
que
238
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
intercambien los caminos. En este caso, los cables neutros y tierra no son nunca
conmutados.
Figura 151 Dispositivo con interruptor
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 341
CAPITULO 8: TRANSFORMADORES E INDUCTACIA MUTUA LECCIÓN 1:
TRANSFORMADORES IDEALES
Muchos circuitos ac incluyen una red de fuente acoplada magnéticamente a una
red de carga por un transformador. Analizaremos aquí los principios físicos involucrados
en la acción del tranformador.
Propiedades de un tranformador ideal
239
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 152 Transformadores ideales
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 350
La figura 152 simboliza un tranformador ideal, es un dipositivo de cuatro terminales
consistente de dos bobinas de alambre. Una bobina tiene N1 vueltas y es llamado el
primario, mientras la otra tiene N2 vueltas y es llamada el sucundario. Juntas pueden
servir como entrada del transformador, asi que tomamos la dirección de referencia para
ambas corrientes dentro de las terminales superiores.
El acoplamiento magnetico suministra interacción entre las bobinas, pero no existe
conexión eléctrica desde el primario al secundario. En consecuencia, nosotros
indicamos las polaridades de voltaje relativas de las siguiente convensión de puntos:
La diferencia de potencial del punto
al no punto del embobinado sencundario tiene la
misma polaridad como la diferencia de potencial del punto al no punto del embobinado
del secundario.
240
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La referencia de polaridad de la figura 152 esta de acuerdo con esta convensión,
tomando el punto como el mayor potencial.
Ambas bobinas idealmente tienen resistencia cero, y ellas actúan similarmente a un
corto circuito bajo condiciones de estado estable dc. Una corriente constante que va a
través de un embobinado no produce efecto en otro embobinado. Pero el transformador
comienza a trabajar cuando cualquier embobinado tiene una excitación que varia
con
el tiempo, la cual activa el acoplamiento
inducido
en el embobinado
ideal con
opuesto.
magnetico
El comportamiento
y produce un voltaje
de un transformado
la excitación variante en el tiempo depende totalmente de la relación de
las vueltas:
N = N2 / N1
Especificamente, los voltajes en las terminales y las corrientes están relacionadas
por:
V2(t) = Nv1(t)
i2(t) = - i1(t)/N
El signo negativo en la ecuación de corriente significa que i2 va en la dirección opuesta
de la flecha de referencia cuando i1 es positiva.
Si v1 varia con el tiempo y si N > 1, entonces |v2| = N|v1| > |v1|, y asi tenemos
transfomador
elevador
cuya magnitud
de
un
voltaje instanteneo puede ser mayor
que la entrada. Pero ultima ecuación indica que |i2| puede ser menor que |i1| cuando N
> 1. En consecuencia, un transformador reductor con N < 1 produce |v2| < |v1| y |i2|
>
|i1|. Un tranformador con N1 ≠ N2 puede operar en cualquier modo reductor o
elevador, dependiendo de cual embobinado es usado para la entrada.
Un transformador con N = 1 tiene también valor practico como un transformador de
aislamiento que desacople los niveles de potencial dc sobre cualquier lado. Asi, el solo
propósito de un transformador de asilamiento
los lados primario secundario.
240
es eliminar la conexión eléctrica entre
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
A pesar del valor de N, un transformador ideal nunca disipa potencia. Nosotros
confirmamos esta propiedad al observar que la potencia total instantánea dentro de un
transfomador es p = v1i1 + v2i2. Sustituyendo para v2 y i2 la ecuación anteriormente
mostrada, entonces tenemos:
P = v1i1 + v2i2 = v1i1 + (Nv1)(-i1/N) = 0
Por tanto un tranformador ideal tranfiere potencia fuera de cualquier perdida interna. De
la misma manera aun cuando el símbolo de bobina de la figura 152 similar a el un
inductor, un transformador ideal nunca almacena cualquier energía.
Las anteriores propiedades de un tranformador ideal puden ser representadas por el
modelo de una fuente controlada. El modelo de la figura 153a es el de una VCVS
que sobre el lado del secundario establece v2 = Nv1, mientras la CCCS sobre el
lado del primario incorpora el hecho de que i1 =
-Ni2 cuando i2 = -i1/N.
Razones similares se aplican al modelo de la figura 153b, el cual tiene una CCCS sobre
el lado del secundario y una VCVS sobre el lado primario.
Figura 153. Modelo de un transformador
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 351
Algunas veces un transformador consiste de tres o mas embobinados, o un
embobinado tiene terminales adicionales conocidas como taps. Tales unidades
proveen multiples voltajes de una fuente, necesarios para
241
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
aplicaciones tales como fuentes electrónicas de alimentación o sistemas de voltaje
duales ac.
Figura 154 Transformador ideal con tap
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 351
La figura 154a muestra un transformador ideal con un tap dividiendo el secundario en
dos segmentos que tienen N2 y N3 vueltas. Cada segmento del secundario esta
acoplado magnéticamente al secundario
esto es:
V2 =
N2
v1
v3
=
N1
N3
v1
N1
La corriente del primario resultante es encontrada de la propiedad de p =
v1i1 + v2i2 + v3i3 = 0, asi que:
v2
I1 = v1
v1
-
i2
v3
-
i3 = -
N2
N3
i2
N1
N1
242
i3
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 154b muestra el correspondiente modelo de una fuente controlada
con dos CCCs y dos VCVSs.
Ejemplo: Analisis de un Circuito Transformador
243
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Para ilustrar el análisis con el modelo de fuentes controladas, considere el circuito
con transformador de la figura 155a. Aquí nosotros tenemos una acoplamiento de
una fuente ac a una carga resistiva por medio de un transformador elevador con N
= 3. Pero también
carga
via
un
hay conección eléctrica entre la fuente y el capacitor y la
capacitor. Nosotros buscamos la corriente y la potencia promedio
suministrada por la fuente dada de v = 60 cos 5000t V.
Figura 155 Circuitos con transformador
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 352
Comenzamos por divibujar el diagrama en el dominio de la frecuencia de la figura
155b. De donde V1
=
V, el tranformador es representado usando una VCVs en el
secundario para producir:
V2 = 3V1 = 3 V = 180 V ∠0 0
Por inspección del diagrama se muestra que I2 = Ic - IR, en donde
IR =
3V
1
90
= 2A
=
Ic
V 1 − 3V
1
− j 20
Asi que
243
= -j6 A
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
I = Ic - 3I2 = Ic - 3(Ic – IR) = 6 + j12 =
180 A ∠63.4 0
Z = V/I = 2 -j4 Ω P = 1/2Re[Z]|I|2 = 180 W
Al observar estos resultados, nosotros observamos que la potencia promedio disipada
por El resistor de 90 Ω es PR = ½ x 90|IR|2 = 180
W = P – confirmando que toda la potencia de la fuente es transferida a el resistor.
Redes referidas
La mayoría de los mas comunes tipos de circuitos de transformadores tienen la
estructura de la figura 156a, donde un transformador ideal sirve como una interface
entre una fuente ac y la carga.
Figura 156 Redes referidas
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 353
Teniendo en cuenta que cualquier fuente ac puede ser representada por un modelo
Thevenin, y sencillamente cualquier red de carga pasiva puede ser representada
por esta impedancia equivalente, el diagrama correspondiente en el diagrama de
la frecuencia es como el que se muestra en la figura 156b.En vez de emplear el
modelo con una fuente
244
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
controlada aquí, los propiedades del transformador ideal es mostrado mediante las
relaciones fasoriales.
Iin = NIout
Iout = Iin/N Vin = Vout/N
Vout = NVin
En la figura aparecen estas relaciones para realizar el análisis de estos circuitos.
Primero, se calcula la impedancia equivalente vista desde el primario. En donde
Iout = Vout/Z = NVin/Z = NVin/Z , la corriente en el primario es: Iin = NIout =
N(NVin/Z) = N2Vin/Z
De esta manera
Zin = Vin/Iin = Z/N2
Se conoce a Z/N2 como la impedancia de carga referida vista en el primario. La
figura 157 muestra el circuito equivalente con la impedancia de carga referida
remplazando al transformado y a la carga.
Figura 157 Circuitos equivalente de un transformador
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 354
Para tomar una aplicación importante de la ultima ecuación, tomamos un red con un
circuito serie RLC con Z = R + jwL - j/wC. La impedancia de carga referida puede
ser reescrita como:
245
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Z
=2
N
LR
=
+ 2jw
N
j
N2
w( N 2 C )
Lo cual corresponde a una red serie compuesta de una resistencia R/N2, una
inductancia L/N2, y una capacitancia N2C. Asi nosotros concluimos en general que:
Una carga referida tiene la misma estructura como la red de carga con ambas R y L
divididas por N2 y C multiplicada por N2.
Esta propiedad permite referir la red de carga total al primario, elemento a elemento,
se tiene que calcular la impedancia de carga equivalente Z.
Despues tengamos en cuenta las terminales de salida en la figura 157b y buscamos
la
red
equivalente
Thevenin
viste
desde
atrás
del secundario. Esto se puede
observando que:
Vin = Vs -
ZsIin
= Vs - Zs(NIout) Vout = NVin = N[Vs - Zs(NIout)]
Y El voltaje en secundario y la corriente estan relacionados por: Vout = NVs 2
(N Zs)Iout
El circuito equivalente de la figura tiene la red de fuente referida basada
en la última ecuación en lugar de la red de fuente original y el transformador.
Simplemente NVs es el voltaje de circuito abierto referido al secundario, y
sencillamente N2Zs es la impedancia de fuente referida, la corriente de corto circuito
referido será NVs/N2Zs = Vs/NZs. Asi en general:
Una red de fuente referida tiene la misma estructura que la red de fuente con cada
voltaje multiplicado por N, cada impedancia multiplicada por N2, y cada corriente
dividida por N.
Esta propiedad permite referir la red completa de fuente dentro del secundario,
elemento por elemento.
246
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Cualquiera de las redes referidas de la figura 157 puede ser usada para analizar el
circuito original de la figura 158.
Ejemplo: Transformador acoplando un oscilador
Figura 159 Tranformador acoplando un oscilador
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 358
Una de las aplicaciones del transformador es mostrada en la figura 159a, la cual
representa un circuito de un oscilador electrónico. El oscilador genera un señal senoidal
de 12 V a w = 50,000 y tiene una resistencia de fuente de 1kΩ. Una bateria de 20 V
suministra corriente directa y potencia al oscilador a traves del primario de un
transformador ideal elevador 2:1, el cual acopla el oscilador a una carga RC. La
propiedad de aislamiento del transformador ha sido explotada aquí de la tierra a
el no punto del secundario, es por esto que la tierra de la batería es puesto en el no
punto del secundario a 20 V.
Por superposición, la corriente en el primario iin consiste de un componente ac iin-1
247
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
mas una componente dc iin-2 = -20 V/1kΩ = -20mA. La componente dc
248
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
no produce efecto en el secundario, asi que iout puede ser una sinoidal con w =
50,000. Nosotros podemos encontrar esta corriente refiriendonos a la fuente ac en el
secundario usando N = ½. Entonces nosotros encontramos la componente ac
en el primario por medio de iin-1 = Niout.
El circuito en el dominio de la frecuencia con la red de fuente referida es
mostrada en la figura 159b, donde nosotros convertimos la estructura Thevenin
a la forma Norton de donde la resistencia paralela N2 x Rs = 250 Ω y la
corriente de fuente (N x 12 V)/(n2 x Rs) = 24 mA
∠0 0 . El voltaje resultante
que cruza el secundario es calculado de la ecuación de nodo:
1
+ j0.005 +
250
1
500
Vout = 24 x 10-3
De donde se obtiene que Vout = 3 V ∠ − 40 0 . Ahora nosotro encontramos Iout por
medio de:
Iout = (j0.005 +
1
)Vout ≈ 16 mA ∠20 0
500
De donde , Iin-1 = NIout ≈ 8mA ∠20 0 , y la corriente total en el primario es iin =
iin-1 + iin-2 ≈ 8 cos(50,000t + 200) - 20mA.
Impedancia equivalente:
Retomando la investigación de la potencia transferida en secciones anteriores, en
donde encontramos que la maxima potencia transferida de una fuente con una
resistencia fija Rs y una reactancia Xs ocurre cuando la carga tiene la impedancia
equivalente:
Z = Zs* = Rs - jXs
Asi que Z = R + jX, cuando la potencia maxima tranferida requiere R = Rs y
X = -Xs. La potencia resultante máxima liberada a la carga es: Pmax = Vrms2/4Rs
249
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde Vrms es el voltaje de fuente rms de circuito abierto.
Pero si Rs y R tienen valores diferentes fijos, entonces la impedancia requiere la
ayuda de un transformador entre la fuente y la carga, como se muestra en la figura
157b. La impedancia de carga referida al primario se convierte en Z/N2, asi que la
potencia transferida es maximizada tomando
Z/N2 = Zs*
Las vueltas del transformador N debe ser escogida para satisfacer R/N2 = Rs, y la
reactancia de carga debe ser ajustada tal que X/N2 = -Xs.
Si ni r o X pueden ser ajustadas,
entonces no se puede obtener la maxima
potencia. En este caso, la mayor potencia posible a la carga ocurre cuando:
│Z│/N2 = │Zs│
LECCION 2: ACOPLAMIENTO MAGNETICO E INDUCTANCIA MUTUA Circuitos
magneticos:
En anteriores lecciones se consideraron dispositivos magneticos similares a los de la
figura 160a. Alli una bobina tiene N vueltas alrededor de un núcleo cilindrico que
suministra un camino para el flujo magnetico Φ producido por una corriente i. La
dirección de Φ es dada por la regla de la mano derecha:
250
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 160 Circuitos magnéticos
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 361
Asi cuando i entra en la terminal superior de la bobina, como se muestra, la dirección
de Φ es desde la parte inferior a la superior del núcleo. El flujo entonces existe
en la bobina en la parte superior, pasa a traves del espacio, y entra a la bobina en la
inferior.
La cantidad de flujo se incrementa si se emplea una bobina con estructura cerrada
similar al de la figura 160b. Y si el núcleo del material tiene una considerable
permeabilidad relativa µr. Estas condiciones aseguran que la mayoria del flujo no
deje el núcleo. El valor resultante de Φ es dado aproximadamente por:
Φ = µr µoNiA/l
Donde A es la sección de area a traves del núcleo y l es la longitud promedio del
camino del flujo a traves de la bobina.
Nosotros llamamos a la figura 160b un circuito magnetico porque el flujo circula
alrededor de un camino cerrado magnetico, justamente la corriente circula alrededor de
una camino electrico cerrado. La analogía entre los circuitos electricos y magneticos es
introducido mediante dos terminos adicionales.
Primero, se expresa el efecto del producido de la bobina en terminos de fuerza
magnetomotiva (mmf), definida por:
F ∆ Ni
Segundo se expresa propiedades magneticas del camino del flujo en terminos de
reluctancia, definido por
R = l/µr µoA
Al combinar las ecuaciones se obtiene una expresión simple: F = R Φ
250
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La cual es la versión magneticas de v = Ri. El circuito correspondiente
magnetico es dibujada en la figura 161, y se observa claramente que la fuente
mmf F
aplicada a la reluctancia R
resulta en el flujo Φ = F / R
Figura 161 Circuito magnético correspondiente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 362
La figura 162
muestra un configuración
de núcleo mas complicada con dos
embobinados y dos caminos de flujo cerrado. La bobina de la izquierda conlleva
ambos Φ1 y Φ2, pero la bobina de la derecha solamente lleva Φ2. El diagrama del
circuito magnetico de la figura 162b en todo caso incluye dos fuentes mmf. De la
regla de la mano derecha, la fuente F1
= N1i1 maneja ambos Φ1 y Φ2 mientras
la fuente F2 = N2i2 conduce Φ2. El diagrama tiene una reluctancia R12 representa el
camino Φ1 y Φ2 juntos, R1 representa el camino de Φ1 solamente, y R2 representa
el camino de Φ2. Dado los valores de mmf y reluctancia, nosotros podemos emplear
los metodos de analisis de circuitos se puede evaluar Φ1 y Φ2.
251
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 162 Nucleo con dos embobinados
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 362
Autoindutancia y inductancia mutua
La figura 163a representa un circuito magnetico de tipo comúnmente usados para
transformadores reales. Nuestro objetivo aquí es obtener las relaciones entre las
Figura 163 Transformador real
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 363
Terminales de voltaje y corriente de las dos bobinas. Estas relaciones dirigen los
conceptos de inductancia e inductancia mutua.
252
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Como anteriormente, la bobina con N1 vueltas es designada como el primario y la
bobina con N2 vueltas es designada como el embobinado secundario. La corriente
i1 entra en la Terminal del punto del primario estableciendo F
1
= N1i1, la cual
conduce el flujo en la dirección de las manecillas del reloj alrededor de la bobina. La
corriente i2 de otra manera establece F
2
= N2i2, la cual también maneja el flujo
en la dirección de las manecillas del reloj. Asi, los puntos aquí significan que:
La corriente que entran en el punto de un embobinado produce un flujo en la misma
dirección al flujo producido por la corriente entrante al punto y al otro embobinado.
Hay siempre algún flujo de fugas Φl de escape. En consecuencia, el flujo total Φ1
vinculado a el primario deferente del fujo total Φ2 vinculado a el secundario. El
diagrama del circuito magnetico toma la forma de la figura 163b, en donde representa
R1 representa la reluctancia del camino de fugas. Tomando Φl y Φ2 de
similar a corrientes de malla en este diagrama,
manera
se obtiene
fácilmente la matriz de ecuaciones:
− ℜl
ℜ1 + ℜ l
φ1
N 1i1
=
ℜ 2 + ℜl
− ℜl
N 2 i2
φ2
De la solución simultánea se obtiene:
Φl =
N1i
1
ℜ1
1
+
i2
ℜM
N2
Φ2
=
N1i
1
ℜ
N 2 i2
+
ℜ 22
M
Donde se introduce
R11 = R1 + R2║ Rl
R22 = R2 + R1║ Rl
RM = R1 + R2 + (R1 R2/ R1)
Las cantidades R11 y R22 son precisamente las reluctancias equivalentes vistas por las
mmfs F1 y F2 respectivamente. La inductancia mutua RM cuenta por el hecho de que F
1
contribuye a Φ2 y F
2
contribuye a Φ1.
253
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Posteriormente se asume que las bobinas tienen una resistencia despreciable, asi que
los voltajes en los terminales estan dados directamente por las leyes de
Faraday. Específicamente se obtiene:
dφ1
dt
v1 = N1
v2 = N2
dφ 2
=
N1
2
N1 N
di1
di2
dt
2
ℜM
+
dt
N1 N
2
N
di1
+
2
ℜM
dt
=
ℜ11
2
di 2
ℜ 22 dt
dt
Estas dos ecuaciones pueden ser limpiadas para realizar unas más entendibles
definiendo:
2
L1 =
N1
ℜ11
2
L2 =
N2
ℜ 22
M=
N1 N 2
ℜM
En donde tenemos:
v1 = L1
di1
di
+M 2
dt
dt
v2 = M
di1
di
+ L2 2
dt
dt
Observe que v1 y v2 dependen de ambos i1 y i2 porque Φ1 y Φ2 dependen de ambas
corrientes.
Para interpretar las cantidades L1 y M, se toma al secundario como un circuito abierto
asi que di2/dt = 0 y la última ecuación se convierte en:
V1 = L1di1/dt
v2 = M di1/dt
Claramente, L1 corresponde a la inductancias del primario por si mismo, conocida
como la auto inductancia del primario. Pero la corriente del primario también afecta el
secundario, y M representa el acoplamiento magnético del primario al secundario.
Este acoplamiento surge porque parte del flujo Φ1 porducido por N1i1 se enlaza a el
secundario e induce el voltaje de circuito abierto v2 = Mdi1/dt. En consecuencia si
di1/dt = 0, entonces
254
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
V1 = M di2/dt
v2 = Mdi1/dt
255
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Por tanto L2 es la autoinductancia
del secundario,
y M ahora representa
el
acoplamiento magnetico del secundario al primario. Sencillamente el acoplamiento e
el mismo en cualquier dirección, M es llamada la inductancia mutua entre las bobinas.
Hemos podido observar que las autoinductancias L1 y L2 son proporcionales a
2
yN1N 2, respectivamente,
en donde además la inductancia mutua es
2
proporcional a N1N2. Al relacionar las ecuaciones anteriores, Ma esta
relacionada a L1 y L2 por:
M=k
L1 L2
Donde
K=
ℜl
(ℜ1 + ℜl )(ℜ2 + ℜl )
≤ 1
Se conoce a k como el coeficiente de acoplamiento. El máximo acoplamiento
(k= 1) ocurre cuando Rl = ∞,
Ejemplo: Inductancia equivalente serie
Figura 164 Dos bobinas conectadas en serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 366
256
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 164a muestra dos bobinas conectadas en serie que forman una red de dos
terminales. En ausencia de inductancia mutua, se puede escribir v = Leq/dt con
Leq = L1 + L2. Pero buscamos el efecto de la inductancia mutua sobre la inductancia
equivalente.
Para responder esta inquietud, nosotros redibujamos y marcamos la red como se
muestra en la figura 164b asi que claramente se ve que i1 = i, i2 = -i, y v= v1
– v2. Se observa que las bobinas tienen sentido de embobinado opuesto, de la
figura obtenemos las siguientes figuras:
di1
v1 = L1
dt
dt
M
di1
v2 = -M
- M
di 2
= L1
di1
-
di
= (L1 + M)
d
(−i)
dt
dt
- L2
di 2
= -M
dt
di1
+ L2
di
= -(M + L2)
d
(−i)
dt
dt
dt
dt
dt
Asi que, v = v1 - v2 = (L1 + 2M +L2) di/dt = Leq di/dt donde
Leq = L1 + L2 + 2M ≤ L1 + L2 + 2
L1 L2
La inductancia mutua incrementa la inductancia equivalente serie. Si las bobinas
tienen el mismo sentido de embobinamiento, o si se invierten las conecciones a una
bobina, entonces nosotros podemos obtener Leq = L1 + L2
– 2M
Energía almacenada y acoplamiento unitario
Analizamos la energia almacenada en las bobinas acopladas magnéticamente, dando
especial atención a el acoplamiento unitario. Para simplificar, trabajaremos con
bobinas
que
tienen
el mismo
sentido
de embobinamiento podemos entonces
remplazar M por –M para contar con el sentido opuesto.
El valor de la energia transferida dentro de las bobinas de las figura 165 es dw/dt
257
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
= p = v1i1 + v2i2. Expandiendo v1 y v2 y observando que Mi1di2/dt + Mi2di1/dt = M
d(i1i2)/dt, obtenemos:
258
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
dw
di1
= L1i1
dt
+
di1 di
2
dt
M
dt
+
L2i2
di 2
dt
Figura 165 Bobinas acopladas magnéticamente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 366
Para encontrar la energia instantanea almacenada, se integra dw/dt en el tiempo
-∞ a t. Asi, usando la variable λ,
desde
t
W(t) = L1
∫ i (λ )di (λ )
1
−∞
t
+ L2
−∞
∫i
2
1
t
+ M
−∞
∫ d[i (λ )i
1
2
(λ )]
(λ )di2 (λ )
2
=1/2 L1i1 (t) + Mi1(t)i2(t) +2 1/2L2i2 (t)
Donde nosotros asumimos que la energia almacenada y la corriente es igual a cero en
t = - ∞.
No hay acoplamiento magnetico, cuando M = 0 y la ultima ecuación se redude a
w = 1/2L1i12
+ 1/2L2i22 – precisamente se esperaba la energia almacenada por dos
inductores aislados. El acoplamiento magnetico incrementa o decrementa la energia
almacenada, dependiendo del sentido de embobinado y los signos de la corriente.
Cuando Mi1i2 es una cantidad positiva, w se incrementa. Pero w se decrementa
259
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
cuando Mi1i2 es una cantidad negativa.
260
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Información adicional acerca de la energia almacenada puede ser obtenida de la
última ecuación al mantener una corriente constante. En particular la figura
166 dibuja w versus i2 con i1 fijo a un valor positivo. Esta curva exhibe un unico
minimo a i2 = -(M/L2)i1 , donde
wmin =
L1
L2
−M2
2
1
i
2L2
Figura 166 Energia alamacenada
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 367
LECCIÓN 3: CIRCUITOS CON INDUCTANCIA MUTUA Analisis de
impedancia
En principio, cualquier circuito con inductancia mutua puede ser analizado
comenzando con las ecuaciones basicas de voltaje – corriente:
v1 = L1
dt
di1
M
dt
+/-
di 2
v2= +/-
M
di1
dt
261
+ L2
di 2
dt
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 167 Inductancia mutua representada por fuentes controladas
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 369
De manera alternativa, nosotros podemos usar el modelo de circuito de la figura
167 donde el efecto de la inductancia mutua aparece como una fuente de voltaje
controlada
por la derivada di1/dt
y di2/dt. El signo positivo sobre la fuente
controlada corresponde a la bobina con el mismo sentido de embobinado.
Bajo condiciones de estado estable ac, el análisis se simplifica aun mas trabajando con
fasores e impedancias. Claramente, cualquier término de autoinductancia
L1di1/dt
tal como
debe ser remplazado por jwL1I1 en el dominio de la frecuencia. Del
mismo modo, un termino de inductancia mutua tal como M di2/dt
debe ser
remplazada por jwMI2, incluso aunque M no exista como un elemento distinto de
inductancia. La versión ac de la última ecuación se convierte en:
V1 = jwL1I1 +/- jwMI2
V2 = +/-jwMI1 + jwL2I2
262
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 168 Modelo resultante en el dominio de la frecuencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 369
La figura 168 muestra el modelo resultante en el domino de la frecuencia. El
valor de wM es relacionado a las reactancias wL1 y wL2 por:
wM = k
Donde M = k
Asi
que
wL1 wL2
≤
y k ≤ 1.
L1
L2
se
coloco
wL1 wL2
el
modelo
en
el
dominio
de
la
frecuencia
inmediatamente para usar el análisis de circuitos en la figura 169a. Aquí de nuevo se
tiene un transformador sirviendo de interface entre una fuente y una carga. Pero
ahora nosotros tratamos con un transformador real consistente de unas bobinas
260
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 169 Modelo en el dominio de la frecuencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 370
Acopladas magnéticamente. Las bobinas tienen el mismo sentido de embobinado,
y iout = -i2, asi que el diagrama en el dominio de la frecuencia se convierte como
el que se muestra en la figura 169b. (Un diagrama mas completo debe incluir resistores
en serie representando la resistencia del bobinado del primario y el secuandario).
Las cantidades de interés en la figura 169b son las relaciones entre
Vout/Vin y Iout/Iin y la impedancia de entrada Zin = Vin/Iin. Se comienza el análisis
escribiendo las ecuaciones de lazo: jwL1Iin - jwMIout = Vin
= -jwMIin
De donde:
I out
jwM
jwL2 + Z
=
I in
261
(jwL2 + Z)Iout
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
(wM ) 2
Zin = jwL1 +
=
jwL2 + Z
jw
M
jwL2 +
Z
=
jwL1 Z + (wM ) 2 − wL1 wL2
jwL2 + Z
Entonces, por tanto Vout = ZIout,
V out
=
V in jwMZ
jwL Z +1 (wM ) 2
− wL1 wL2
Esta expresión es para cualquier impedancia de carga Z con cualquier coef iciente
de acoplamiento k.
Pero si k =1, entonces (wM)2 - wL1L2 = 0 y nosotros podemos obtener las
correspondientes expresiones para L1, L2 y M, Las últimas ecuaciones las
podemos simplificar para obtener:
I out
I in
Zin =
M
1
=
L2 1 + Z / jwL2
L1
1
=
L2 1 + Z / jwL2
V out
M
=
=
Vin
L2
1
1
=
N 1 + Z / jwL2
1
N
2
1
1 + Z / jwL2
N2
= N
N1
La última ecuación nos permite llegar a la conclusión de que un transformador acoplado
unitario produce la misma razón de voltaje como un transformador ideal. Si
suponemos que la autoinductancia del secundario es grande entonces se tiene que
│Z/jwL2│ << 1. Entonces 1 + Z/jwL2 ≈ 1 y:
262
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Iout /Iin ≈ 1/N
Zin ≈ Z/N2
Por tanto, un transformador real imita el comportamiento de un transformador ideal
entonces:
263
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
K≈1
wL2 >> │Z│
Redes equivalente T y Pi
Muchas de las aplicaciones
involucran un transformador
con el primario y el
secundario concectados como se muestra en la figura 170a, donde el alambre
adicionado del nodo
Figura 170 Redes equivalentes T y Pi
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 372
n1 a el nodo n2 asegura que vn = 0. En tales circunstancias, nosotros podemos
remplazar el transformador por una red equivalente T como la de la figura
170b. el signo positivo asociado con M corresponde a la bobinas teniendo el mismo
sentido de embobinado, asi las tres inductancias son L1 - M, M y L2 – M. El signo
negativo
corresponde
a el
embobinado
teniendo
el
sentido
de embobinado
opuesto, en cuyo caso las tres inductancias son L1 + M, -M, y L2 + M.
La red T consiste de inductancias ficticias, algunas de las cuales tiene valores
negativos. Sin embargo, la equivalencia es fácilmente establecida escribiendo las
relaciones de las terminales de voltaje – corriente. La corriente que va a traves del
lazo del medio en la figura 170b es i1 + i2, asi que:
264
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
V1 = (L1 -/+ M)
dt
d
+/-
(i1 + i2) = L1
M
dt
V2 = (L2 -/+ M)
di2
di1
+/-M
dt
d
+/-
M
dt
dt
di1
(i1 + i2) = +/-
M
di 2
dt
di1
+/-L2
dt
di 2
dt
La red T representa de manera correcta las condiciones de las terminales de un
transformador.
Analizar los circuitos con transformador se vuelve sencillo cuando se sustituye una
red equivalente T porque fácilmente se incorporan las relaciones de voltaje
– corriente sin fuentes controladas. Además, teniendo identificado el signo propio
para M, Se toma en la red T cualquier convención de referencia de polaridad y las
marcas para los voltajes y corrientes.
La estructura de la red T
es fácilmente analizable por analisis de malla para
encontrar las corrientes i1 y i2. Pero algunas veces nosotros necesitamos encontrar v1
y v2 por medio de analisis de nodo. El nodo del medio de una red T entonces
introduce un tercer voltaje desconocido que no tiene significado fisico. Para tal
caso, nosotros usamos una red equivalente pi(π) como la de la
figura 171, donde :
L11 =
L2 − / + M
L1
L2
−M
2
L12
=
L1
L2
−M
2
− /+
M
L22
=
Teniendo en cuenta que k ≠ 1
265
L1
L2
−M2
L1 − / + M
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
266
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 171 Red equivalente π
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 373
De manera similar a una red T, la red pi consiste de inductancias ficticias
arregladas para mostrar las correctas relaciones de las terminales. La red pi es derivada
de la red T aplicando la versión para impedancias vista en lecciones anteriores. Sin
embargo, la transformación incluye la división por L1L2 – M2, así que la red pi no existe
cuando k = 1.
Finalmente observe que una red equivalente T o pi puede involucrarse par análisis
aun cuando el transformador carece de una conexión directa entre n1 y n2 en la figura
170a La condición esencial es que el voltaje vn no debe tener componentes que varíen
en el tiempo.
Ejemplo: Análisis circuital de transformadores con un red T
Figura 172 Analisis circuital de transformadores con una red T Fuente: CALSON
A. BRUCE. Circuits. Brooks/Cole.2000. Pag 374
Se necesita encontrar Im, Iout, y Vout cuando el circuito de un transformador como el
de la figura 172a
opera bajo las condiciones
de estado
estable. Nosotros
podemos usar una red T para el transformador desde que un alambre no
267
corto
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
circuite cualquier voltaje de salida. Los puntos muestran que los
268
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
embobinados tiene el mismo sentido de embobinado, asi los parámetros para esta
red T son:
L1 - M = 2 - 4 = -2mH
L2 - M = 20 – 4 = 16mH En adición a M = 4 mH.
Multiplicando las inductancias T por w = 1000 nos conduce a el diagrama en el
dominio de la frecuencia de la figura 37.5b, donde la inductancia negativa tiene
la impedancia jw(L1 – M) = -j2Ω. Realizando analisis de malla se tiene:
− j2 + j4
−j
I in
4
j 4 + j16 − j 20 + 6 I out
− j4
=
10
0
De lo cual
Iin = 3 A ∠ − 36.9 0
Iout= 2 A ∠53.10
La salida de voltaje resultante es:
Vout = (6 – j20)iout = 41.8 V ∠ − 20.2 0
En donde vin = 10 V ∠0 0 . El transformador tiene asi un efecto de elevador.
Otras redes equivalentes
Gran
número
de redes
equivalentes
para
inductancia
mutua involucran
un
transformador ideal. La inclusión de un transformador ideal representa el aislamiento
electrico inherente de los embobinados del primario y secundario, y esto dirige la
simplificación de redes equivalentes para aplicaciones de transformación de potencia
para amplificadores de alta – frecuencia.
269
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 173 Redes equivalentes con un transformador ideal
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 377
Si consideramos la red modificada T 173a, donde un transformador ideal con un
número de vueltas N0 ha sido colocado en lado del secundario. El desarrollo del analisis
confirman que las variables de las terminales de la red estan relacionadas por
ecuaciones usuales de transformadores, a pesar del valor de n0.
escogencia
juiciosa
de
N0
nos
conlleva
a
Pero
la
valorables simplificaciones.
Si se toma N0 = +/-L2/M , entonces -/+M/N0 = -M2/L2 = -k2L1 y asi (L2/N02)
-/+ (M/N0) = 0.
Asi se obtienen dos redes con inductores como se muestra en la
figura 173b. O si nosotros tomamos N0 = +/-M/L1, entonces -/+M/N0 = 0 y L2/N92 =
L1/k2, asi nosotros obtenemos otra red de dos inductores como la mostrada en la
figura 173c. Las relaciones de vueltas negativas –L2/M y –M/L1, en
estas
dos
terminales representa embobinados con sentido de embobinamiento opuestos, la
cual invierte las polaridades de v2 y i2.
270
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Dos o más redes de inductores son fácilmente derivadas de las figuras 173b y
173c para referirnos a lementos a el lado del secundario de un transformador ideal.
Ejemplo: Diseño de un amplificador sintonizado
Figura 174 Diseño de un amplificador sintonizado
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 378
La fuente de corriente de la figura 174a representa la salida de un amplificador
transistorizado. El acople de un transformador a la red RC crea un efecto de resonancia
paralela, y nosotros decimos que el amplificador esta “sintonizado”. La tarea de diseño
en este caso en particular es determinar los valores para C
y R de forma que el circuito resuene a w0= 106 con un factor de calidad Qpar =
25.
271
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Para tomar la estructura paralela, nosotros trabajamos con la red equivalente
en la figura 174 b para el transformador. Los parámetros de red son:
2
K =
M2
L1 L2
= 0.8
4µH
L2
k2L1 =
(1- k2)L1 = 1µH
=2
M
La figura 174 b muestra el circuito equivalente. Nosotros entonces nos referimos
a el
primario con un relación 1:2 de un transformador ideal cuyo secundario se
obtiene en la figura 174c. Este diagrama cofirma que vout aparece a través de la
red paralela RLC, sencillamente la otra inductancia en serie con la fuente de
corriente simplemente introducen un pequeño voltaje a w0.
Finalmente, calculamos C y R de w02 = 1/LC y Qpar = R/w0L, donde L = 22 x 4
= 16µH. Asi que:
C = 1/(w 2L) 0= 62.5 nF
R= w LQ 0 =par
400Ω
LECCIÓN 4: TRANSFORMADORES DE POTENCIA Pérdidas y
eficiencia
Los tranformadores diseñados para aplicaciones de potencia ac invariantemente
tienen embobinados de alta permeabilidad ferromagnetica
y nucleos envueltos, los
cual elimina las fujas de flujo y asegura que k ≈ 1. De la misma manera, en operación
normal, la impedancia de carga es usualmente pequeña comparada a la impedancia
del secundario y la autoinductancia.
Un transformador de potencia tiene un
comportamiento silimar aproximadamente al de un transformador ideal.
Sin embargo, grandes cantidades de potencia son involucradas, entonces debemos
considerar las perdidas incluidas en el transformador. La causa mas obvia de perdida
de potencia es el calentamiento óhmico en la resistencia del embobinado. La potencia
promedio disipada en el embobinado es llamada pérdidas del cobre para distinguirlas
de la potencia disipada dentro del nucleo.
272
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Pero las perdidas del nucleo también ocurren en cualquier circuito magnético que
tenga
una mmf
calentamiento
con
variante
nucleos
en el tiempo,
y haya
ferromagneticos.
Una
dos
mejores
fuente
es
el
fuentes
de
efecto
de
hysteresis que causa variaciones de flujo. En la operación ac a una frecuencia f, la
potencia promedio de histéresis de perdidas es dada por la formula empirica de
Steinmetz’s
Ph = KhfΦma
n
x
Donde Φmax es el máximo flujo mientras Kh y n son características del nucleo. El
valor del exponente n esta en los rango de 1.5 a 2.0.
Figura 175 Flujo variante en el tiempo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 379
270
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La otra fuente mayor de calentamiento del nucleo son las corrientes parasitas. Para
explicar este efecto, la figura 175a representa un flujo variante en el tiempo Φ(t)
pasando a través de una sección transversal de un nucleo ferromagnetico. De acuerdo
a las leyes de Faraday, Φ(t) induce un voltaje a través del perímetro de una sección
transversal lo cual, produce la corrientes parasitas ie. Como ie circula alrededor del
camino perpendicular a el flujo, este encuantra una resistencia Re en el nucleo del
material y asi disipa una potencia
2
Reie . La potencia promedio resultante parasita de perdidas es
Pe = kef2Φma 2/Re
x
Donde ke es otra característica del nucleo.
Afortunadamente,
parasitas
nosotros podemos minimizar las perdidas de las corrientes
simplemente
por
construcción
del
nucleo
con
pequeñas
hojas
llamadas laminaciones, como se muestra en la figura 175b. Las laminaciones deben
ser paralelas a el camino del flujo y asiladas un de la otra por revestimiento en
varniz. Si hay m laminaciones, entonces cada una lleva Φmax/m y tiene una
resistencia de cerca de mRe, sencillamente la anchura del camino conductor ha sido
reducida por cerca de 1/m. La corriente parasita de
pérdidas en una nucleo laminado entonces se convierte en:
Mx
mRe
2
Ke f
m
(φ
ma
x
/ m) 2 e
=
P
2
Asi las perdidas de corriente parasitas en un nucleo con 10 laminaciones
pueden ser solamente un 1 % de las perdidas en un nucleo comparable solido.
271
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
272
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 176 Modelo en el dominio de la frecuencia de un transformador de
potencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 380
Para analizar las perdidas con un acoplamiento magnético en un transformador de
potencia, nosotros usamos el modelo en el dominio de la frecuencia de la figura 176.
Como se indica por las suscripciones de entrada / salida, nosotros asumimos que una
fuente es conectada a el lado del primario y la carga a el lado del secundario.
Nosotros
también
asumimos
que los nucleos
tienen
el mismo sentido de
embobinado. De manera consistente con nuestro objetivo de cálculos de potencia,
todas las magnitudes fasoriales pueden ser expresadas en términos de valores rms.
El acoplamiento magnetico de los transformadores es represenado aquí por dos
inductores y un transformador ideal, con la previsión adicional que k ≈ 1.
De acuerdo con esto, el numero de vueltas de un transformador ideal es M/L1
= k L2 L 1
≈ N2/N1 = N. Los dos inductores aparecen como una reactancia
magnetizante Xm y la reactancia de fugas Xl, donde
Xm = wL1
Xl = w(1 – k2)L1/k2
Observe que la reactancia de perdidas
es mucho menor que la reactancia
magnetizante sencillamante porque Xl/Xm = (1-k2) /k2<<1 donde k ≈ 1.
Dos resistores han sido adicionados al modelo para representar la disipación de
potencia interna del transformador. Las perdidas del nucleo son representadas
por la resistencia Re en paralelo son jXm, ai que el valor de Re debe satisfacer
Ph + Pe = |Vin|2/Re
La localización
de Re refleja el hecho de que las perdidas en el nucleo son
esencialmente independientes de la corriente de carga Iout. Las pérdidas del cobre
son representadas por una pequeña resistencia Rw en serie con jXl. Por
273
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
tanto, los dos embobinados actualmente tienen resistencias separadas. Pero no
podemos obtener
Pw = Rw|NIout|2
Donde Pw es la potencia dispada por ambos embobinados, Asi Rw modela el efecto
total mayor que el embobinado individual.
La figura 176 también ha sido marcada con gran número de variables tales como
Ic y Vw que no existen como una cantidad física distintiva. En todo caso estas pueden
ser usadas para calcular cantidades medibles tales como Iin y Vout. La figura 177 es
la construcción fasorial para vin y Iin tomando Vout como la referencia.
La
construcción asume una carga inductiva con un angulo de impedancia θ > 0, asi
que Iout retraza a Vout. Los voltajes fasoriales representan la relación de la
KVL Vin
=
Vout/N
+
Vw + Vl, mientras los fasores de corriente representan las
relaciones de KCL Iin = NIout + Ic + Im.
Una importante conclusión del diagrama fasorial es concerniente a el angulo de la
impedancia equivalente a las terminales del primario, de manera nominal, θin
= ∠V in - ∠I in .
Sencillamente θin
potencia
> θ en este caso, la fuente muestra un menor factor de
que el factor de potencia de la impedancia de carga sola. Esta
observación soporta el hecho de que la fuente debe suplir potencia reactiva a el
transformador tan bien como la carga inductiva.
274
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
275
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 177 Construcción fasorial
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 381
Si nosotros conocemos
los valores de los parámetros Rc, Xm, Rw, y Xl,
entonces nosotros podemos predecir como el transformador se comporta cuando
es conectado
a una carga especifica. En particular, de la figura 177 nosotros
vemos que la disipación de potencia en el transformador esta dada por:
Pdis = Rc|Ic|2 + Rw|NIout|2
Por tanto, la eficiencia de la potencia – transferida es:
Pout
Eff =
Pdis + Pout
Donde Pout es la potencia absorbida por la carga.
Ejemplo: Eficiencia de un transformador de potencia
Cierto transformador de potencia elevador con N = 5 tiene los siguientes valores
de los parámetros: f = 60 Hz:
Rc = 40 Ω
Xin = 24 Ω
Rw = 0.08 Ω Xl = 0.5 Ω
Se investigará el comportamiento de este transformador cuando este se acopla a una
fuente ac 120 – V(rms) a una carga resistiva de 36Ω. Para propósitos de comparación,
observe que un transformador ideal puede puede producir |Vout|
= 5 x 120 = 600 V y libera Pout = 6002/36 = 10,000 W.
276
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 178 Cálculo de la eficiencia de un transformador de potencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 382
La figura 178 muestra el diagrama del circuito equivalente incorporando el modelo
con la resistencia de carga referida a el primario como 36/52 = 1.44Ω. La rutina de
análisis nos lleva a:
Ic = 120/40 = 3A
5Iout =
Im = 120/j24 = -j5 A
120
0.08 + j0.5 +
1.44
= 71.2 – j23.4 = 75.0
A
Iin = Ic + Im + 5Iout = 74.2 – j25.4 = 79.5 A
− 18.2 0
− 21.2 0
Asi que
Iout = 15.0 A
− 18.2
0
Vout = 36Iout = 540
V
− 18.2 0
Pout = 36 x 15.02 = 8100 W
Pdis = 40 x 32 + 0.08 x 75.02 = 810 W Eff = 8100/8910 ≈ 91 %
Podemos ver que el transformador prove una respectable eficiencia de
transferencia de potencia.
PARAMETROS DE MEDICIÓN
277
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El modelo de transformador
de la figura 176 nos facilita la medición
de
parámetros en un transformador real – una tarea necesaria e importante cuando
se manufactura es suministrar toda la información necesaria para analizar el
desempeño de un transformador de potencia.
Los datos son listados en la placa de un transformador consistente de los valores
de voltaje rms y las valores aparentes maximos de potencia a la frecuencia
especificada. De estos datos usted puede calcular los rangos de corriente. Por
ejemplo, suponga una placa en particular con la etiqueta de:
60 Hz, 720/240 V, 36 kVA
Esto significa que el transformador ha sido diseñado para operar a 60 Hz con
│Vin│max = 720 V
│Vout│max = 240 V N = │Vout│max/│Vin│max = 240/720 = 1/3
│Iin│max = 36 kVA/720 V = 50 A
│Iout│max = 36 kVA/240 V = 150 A
Nosotros
podemos
operar
esta transformador
con base
en
estos
datos
y
emplearlo como modo elevador con N =3 , │Vin│max = 240 V , etc.
Dada la información de la placa, los valores del modelo de los parámetros Rc, xm,
Rw,
y Xl pueden
ser
determinados
experimentalmente
usando
un watimetro
medidores rms y voltímetros. El procedimiento involucrado tiene los siguientes pasos:
278
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 179 Pasos para la medición en un transformador de potencia
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 384
1.
Medición en circuito abierto. Usando la configuración de la figura 179a con el
secundario abierto. Se ajusta el voltaje del primario, y se registran los valores de │Vin│,
│Iin│, y Pin = Poc. La potencia real Poc es disipada enteramente por Rc, mientras Xm
absorbe la potencia reactiva Qoc. Por tanto:
Rc = │Vin│2/Poc
Donde Qoc =
Xm = │Vin│2/Qoc
Vi
}
2
Iin
− Poc
2
2
n
Una medición de voltaje de salida en circuito abierto nos puede dar la razón de vueltas
por medio de :
N = │Vout│/│Vin│
279
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
2. Mediciones en corto circuito. Empleando la configuración de la figura 179 b con el
secundario en corto. Ajustando la corriente del primario por debajo del valor maximo,
y registrando los valores de │Vin│, │Iin│, y Pin = Psc. La potencia real Psc es ahora
disipada en el primario por Rw, mientras Xl absorbe la mayoria de la potencia
reactiva Qsc. Asi que,
Rw ≈ Psc/│Iin│2
Donde Qsc =
Xl ≈ Qsc/│Iin│2
Vi
}
2
Iin
− Psc
2
2
n
280
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CAPITULO 9: TRANSITORIOS
LECCIÓN 1: TRANSITORIOS DE PRIMER ORDEN
Se examinaran los transciendes en circuitos que contienen solamente un inductor
o
capacitor,
en
donde
el
comportamiento
es
governado
por
una ecuación
diferencial de primer orden.
Respuesta a entrada – cero
La
figura
180a
representa
una
situación
frecuentemente
encontrada
en
circuitos con interruptores mecanicos o dispositivos electrónicos de conmutación. El
interruptor ha
Figura 180 Circuitos con interruptores
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 393
Sido colocado en posición superior por una largo periodo de tiempo en el
instante de tiempo t = t0, asi el capacitor se carga a vc= V0 y almacena energia wc =
1/2CV
2
. El capacitor
cargado actua como bloque dc bajo condiciones de estado
0
estable, y ic = 0 para t < t0. El interruptor pasa a la posición baja en t = t0, colocando
en corto la red serie RC. Se necesita estudiar el comportamiento del circuito después
del instante de conmutación.
El circuito equivalente para t > t0 es dibujado en la figura 180b, donde vc ≠ 0 y
:
281
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ric + vc = 0
282
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
En donde ic debe ser no cero par t > t0, y vc debe disminuir cuando el capacitor se
descargue a traves del resistor. El comportamiento resultante de ic y vc es llamado la
respuesta a entrada cero porque al circuito no se le ha aplicado fuente en t > to.
La respuesta de entrada cero puede ser de la misma forma como la respuesta
natural desde que se satisfagan la ecuación diferencial homogénea.
Para
expresar
la
ecuación
diferencial
de
manera
compacta,
nosotros
introducimos la notación primaria derivada en el tiempo definida en general como
Y’ = dy/dt
Entonces se puede escribir la corriente del capacitor como: Ic = Cdvc / dt = Cv’c
Al sustituir ic en la ecuación KVL se obtiene: RCv’c + vc = 0
La cual es una ecuación diferencial de primer orden.
Las solución para esta ecuación es una función exponencial de la forma vc = Aest,
cuya derivada es v’c = sAest. Nosotros determinamos el valor de s por medio de
incluir la solución asumida dentro de la última ecuación para obtener:
RCsAest + Aest = 0
De donde vc = Aest ≠ 0, se puede dividir amgos lados por Aest y asi obtener la
ecuación caracteristica:
RCs + 1 = 0
Por tanto
s = -1/RC = -1/τ Donde nosotros introducimos τ = RC
280
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde nosotros llamamos τ como la constante de tiempo porque este mide la
“velocidad” de la exponencial y lleva la unidad de tiempo. La respuesta natural de vc
es entonces
Vc(t) = Ae-t/ τ
Con A como una constante arbitraria.
Pero la respuesta a entrada cero difiere de la respuesta natural en que A debe ser un
valor especifico, nominalmente, el valor que satisface la condiciones iniciales. Para
evaluar A, recordemos que el voltaje a traves de un capacitor no puede saltar de
manera tan grande siempre y cuando la corriente permanezca finita. Sin embargo en
el momento de la conmutación, vc obedece a la condición de continuidad:
Vc ( t +) =0 vc (t0-) = V0
Al colocar t = t0 la ultima ecuación se convierte en
+
Vc (t0 ) -t0/τ
= Ae
= V0
En donde A = V0 e+t0/τ
La respuesta de entrada cero del voltaje es: Vc(t) = (V0 e+t0/τ) e+t/τ
t > t0
La correspondiente respuesta de entrada cero de la corriente es obtenida
observando que i c = -vc/R en la figura 180b. Asi, para t > t0, nosotros tenemos
Vc(t) = V0e-(t-t0)/τ
ic(t) =-
V0
R
e-(t-t0)/τ
El termino (t-t0) aparece aquí reflejando el hecho que estas formas de onda
comienzan en el instante de conmutación t = t0.
281
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 181 Decaimiento exponencial de las formas de onda
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 395
El decaimiento exponencial de la forma de onda de vc(t) y ic(t) es mostrado en la
figura
181, son el estado estable
dc para t < to. Aunque
el voltaje
tiene
continuidad en el instante de conmutación, la corriente salta de ic(t0-) = 0 a ic(t0+)
= - Vo/R. El valor negativo de ic para t > t0 simplemente significa que la corriente
transfiere energía de C a R. Y de hecho, la resistencia eventualmente absorbe toda la
energía almacenada por el capacitor.
Para explorar esta energía transferida, observe que la resistencia disipa potencia
instantánea:
pR = -2(t-to)/RC
Ric2 = (V0 /R)e
2
t > t0
Cuando t→∞, la energia total absorbida por R es:
∞
∞
2
V
wR =
∫ p R dt =
to
0
R
−2t / RC
dt
e2to/RC e
∫
to
282
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
2
=
R
V0
e2to/RC(
2
− RC
2
)(e-∞ - e-2t0/RC) =
2
V0 C
283
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Asi, se espera que wR se igual a la energia inicial almacenada wC = 1/2CV 2.
0
Figura 182 Circuito conmutado
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 396
La forma de onda decayente también ocurre en el circuito conmutado similar al de la
figura 182. Aquí se tiene vL = 0 en el estado estable dc para t < t0, asi la fuente de
corriente constante establece iL = I0 y wL = 1/2LI 2. Cuando0 la conmutación
ocurre a la posición baja en t = t0, la fuente es desconectada y la KVL alrededor de la
rama RL requiere que RiL + vL = 0 con vL = L diL/dt =
LiL’. La ecuación diferencial es en todo caso LiL´+ RiL = 0 o
(L/R)i’L + iL = 0
Al asumirse que iL = est entonces tenemos la ecuación característica: (L/R)s + 1 = 0
De lo cual
Donde
i = -R/L = -1/τ
τ = L/R
Por tanto la respuesta natural de iL es:
iL(t) = A e+t/τ
Con A comenzando como una constante arbitraria.
284
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Pero la corriente a través del inductor debe tener continuidad en el instante de
conmutación, asi que
iL(to+) = iL(t0-) = I0
Lo cual requiere que iL(t0+)
= A e-t0/τ = I0 o A = I0 e+t0/τ . De todas formas, observe
que VL = -RiL para t > to, la respuesta a la entrada no cero de Il(t) y vL(t) son :
iL(t) = I0e-(t-t0)/τ
vL(t) = -RI
-(t-t0)/τ
0
Esta expresión muestra que iL8t9 y vL8t9 decaen a cero desce t > t0, como el resistor
disipa la energía inicialmente almacenada por el inductor.
Ahora se puede generalizar los resultados trasladando la respuesta a entrada no
cero y(t) a cualquier red consistente de resistencias y elementos que almacenen
energía – ya sea capacitores o inductancias -
pero no fuentes independientes.
Vistos desde los elementos de almacenamiento de energía, el resto de la red actua
como una simple resistencia equivalente Req, asi la
constante de tiempo puede ser calculada y escrita como:
Req C
τ=
L / Req
La respuesta a la entrada cero es dada en general por: Y(t) = Yo e-(t-t0)/τ
t > t0
De donde Y0 = y(to+)
Si y (t) es el voltaje de un capacitor o la corriente de inductor, entonces la
continuidad requiere que y(t0+) = y (t0-). Para otras variables, el valor de Y0 debe
ser determinada de la continuidad de vc o IL a el instante inicial t0.
Tomando la última ecuación que describe
la repuesta a la entrada cero de
cualquier red RC o RL, nosotros debemos tener especial atención
en la
correspondiente forma de onda mostrada en la figura 183. La línea punteada indica la
pendiente:
285
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 183 Forma de onda a entrada cero
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 397
Y’(t0+) =
dy
Y
= 0
dt t =t 0+
τ
Esta línea muestra que y(t) inicialmente se dirige hacia cero en t = t0 + τ. Pero la
pendiente progresivamente se decrementa para t > to, y y(t) tiene un valor igual al
37% del valor inicial después de un intervalo igual a una constante de tiempo.
De
la
misma manera la respuesta a la entrada cero nunca completamente alcanza
el cero en el tiempo finito, para la mayoría de propósitos y(t) se convierte
insignificante después de cinco constantes de tiempo cuando:
Y (t0 + 5τ) = Y0e-5 ≈ 0.007Y0
Lo cual es menor que 1 % del valor inicial.
Ejemplo: Respuesta a entrada cero de un circuito RL
286
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 184 Respuesta a entrada cero de un circuito RL
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 398
Si suponemos que se conoce el circuito de la figura 184 el cual ha alcanzado el estado
estable cuando el interruptor ha sido abierto en t = 0. Usted necesita encontrar i(t) y v(t)
para t > 0.
Primero, se calcula la constante de tiempo observando que la resistencia equivalente
conectada al inductor con el interruptor abierto es Req = 40 +10 =
50Ω, asi que:
Τ = L/Req = 60 mH / 50Ω = 1.2 ms
Despues, la corriente es continua aquí, se involucran las condiciones de estado estable
en t = 0- para obtener
I(0+) = i(o-) = 25 V/10Ω = 2.5 A Por tanto con t0 = 0
-t/τ
I(t) = 2.5 Ae
A t>0
De lo cual v (t) = -40 i(t) = -100e Ae-t/τ V
t>0
La continuidad de la corriente en este circuito gnero aun voltaje pico negativo cuyo
valor de 100 V sustancialmente excede la fuente de voltaje de 25 V. La magnitud de la
señal decae haste 37 V a t = τ = 1.2 ms y a |v(t)| < 0.7 V para t > 5 τ = 6ms.
Repuesta Paso
287
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Ahora se buscara el transiente que ocurre en los circuitos estables de primer orden no
teniendo energía inicial almacenda en el tiempo cuando una fuente dc es aplicada.
Esta situación es simplemente la respuesta opuesta de entrada cero en la cual el
voltaje de un capacitor o la corriente de un inductor comienza en
acumula
a un valor
no cero
en el estado
estable.
cero
y
se
El comportamiento del
transciente es conocido cmo la respuesta paso porque la excitanción del circuito se
conmuta abruptamente de OFF a ON.
Para la notación convencional, nosotros expresamos la conmutación de la fuente
empleando la función paso unitario:
U (t) =
0 − −t < 0
1 − −t > 0
Figura 185 Señal paso
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 399
Como se muestra en la figura 185a u(t) salta de 0 a 1 en t= 0. De manera mas general,
multiplicando u(t) por cualquier constante K y remplazando y por t – t0 obtenemos:
0 : t − t0 < 0
Ku(t-t0) =
1 : t − t0 > 0
Esta función dibujada en la figura 185b, hace un paso de “altura” K en el tiempo to.
288
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Se estudiará la respuesta al paso comenza un circuito RC arbitrario conducido por
una fuente dc que va sobre t = t0. Nos enfocaremos sobre el voltaje sobre el capacitor
porque cualquier otra variable de interés puede ser expresado en términos de vc(t).
Relativo al capacitor, el resto del circuito actua de manera similar a una red de fuente
Thevenin teniendo una resistencia Req y un voltaje
conmutado de circuito-abierto.
Voc(t) = Vuu(t-t0)=
0 : t < t0
Vu : t > t 0
El capacitor no tiene una energía inicial almacenada, y asi vc(t0+) = vc(t) = 0, pero la
fuente conduce el circuito hacia las condiciones de estado estable dc con vc = Vu a t
→∞, por tanto ic = Cv’c y Reqic + vc = voc(t) = Vu para t > t0, el comportamiento
del transiente de vc(t) es gobernado por la ecuación diferencial no homogénea :
Τv’c + vc = Vu
t > to
Con τ = ReqC
La solución general de la ecuación diferencial tiene la forma: Vc(t) = Vu + A e-t/τ
-t/τ
La cual consiste de la respuesta forzada Vu mas la respuesta natural A e . La
respuesta
natural debe ser incluida para satisfacer las condiciones iniciales vc(t0+) =
0, y nosotros evaluamos la constante A por medio de :
Vc (t0+) = Vu + A e-t/τ = 0 → A = -Vu A e+t0/τ
Por tanto, la respuesta paso del voltaje del capacitor es:
Vc(t) = Vu + (-Vu A e-t0/τ) e-t/τ = Vu[1- e-(t-t0)/τ ]
289
t > t0
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 186 Circuito RL con fuente de corriente
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 400
Para encontrar la respuesta paso de un circuito RL, nos enfocaremos sobre la corriente
a traves Del inductor y remplazaremos El resto del circuito por una red Norton. El
diagrama resultante en la figura 186 entonces tiene la corriente insignficante de
corto circuito es:
Isc (t) = Iu(t-to)
Asi nosotros inmediatamente concluimos de los resultados previos que la respuesta
paso de la corriente del inductor esta dado po la expresión dual:
iL (t) = Iu[1-e e-(t-t0)/τ] t > t0
Con τ = L/Req.
Ahora obtenemos y (t) para ya sea vc(t) o IL(t) y dijamos Yu para denotar el valor
de la respuesta forzada dc. La respuesta paso puede entonces escribirse de la forma
genérica:
-(t-t0)/τ
Y(t) = Yu[1-e e
] t > t0
El dibujo de y(t) en la figura 187a muestra como la respuesta va a traves de un intervalo
de transciente sobre este camino al
estado estable con y(t) = Yu con t→∞. La
pendiente inicial es:
Y+(t0+) = Y0/ τ
290
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 187 Respuesta paso
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 401
Y la respuesta comienza coomo la forma de onda rampa:
Y(t) ≈ y’(t0+)(t-t0) =
Y0
(t-t0)
τ
Usando esta propiedad, la porción de corriente es fácilmente esbozada dibujando
una lina recta del punto y = Y0 a t = t0 + τ. El transciente esta en aumento hasta cinco
constantes de tiempo, por tanto y(t) ≈ Y0 para t > t0 + 5 τ.
Basandonos en la figura 187a, la cual representa ya sea vc(t) o IL(t), nosotros podemos
asumir que cualquier circuito estable de primer orden esta en el estado estable
dc al final de cinco constantes de tiempo después de que la fuente se ha aplicado.
De acuerdo con esto, nosotros podemos decir que un interruptor ha tenido una cierta
posición par un “largo tiempo”, signfica que es mayor a cinco constantes de tiempo.
290
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 187b muestra una figura expandida de la respuesta paso mostrando el 10%
del tiempo y el 90 % del tiempo t90, definido por y(t+t10) = 0.1Yu y y(t0+t90) = 0.9Yn.
Asi podemos encontrar t10 = - τ ln(1-0.1) – 0.105 τ y t90 = - τln(1-0.9) = 2.30 τ. El
intervalo de tiempo entre el 10 % y el 90% es llamado el tiempo de subida, y asi que:
Tr = t90 – t10 ≈ 2.2 τ
El tiempo de subida frecuentemente sirve como un indicador de la velocidad de la
respuesta paso.
LECCIÓN 2: TRANSITORIOS EN CONMUTACIONES AC
Los
transcientes
en
conmutaciones
ac
ocurren
cuando
una
excitación
sinusoidal cambia en t = t0, o cuando algún parámetro de una fuente ac sufre una
cambio abrupto. Se investigará el transciente resultante aquí para el caso de circuitos
estables de primer orden. El método de análisis es similar a que el transcientes de
fuentes dc, excepto que la respuesta forzada puede ser una sinuidal mayor que una
constante.
La respuesta forzada de cualquier variable y(t) en una circuito estable puede ser
encontrado asumiendo condiciones ac de estado estable y usando análisis
fasorial para obtener el fasor
∠φ , De acuerdo con esto, podemos
Y = Ym
escribir:
yF (t) = Ym cos(wt + Φ)
La respuesta completa de un circuito de primer – orden con la constante de tiempo
τ es entonces:
y(t) = yF(t) + A e-t/τ
t > t0
Dado el valor inicial y(t0+) = Y0 podemos evaluar la constante A al colocar t =
t0+ para obtener:
+
+
-t0/τ
y(t0 ) = yF(t0 ) + A e
= Y0
291
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde A = [Y0 - yF(t0+)] e+t0/τ y
+
-(t-t0)/τ
y(t) = yF(t) + [Y0 - yF(t0 )] e
t > t0
Esta expresión muestra que y (t) se enfoca en el estado estable ac con t→∞, donde
y(t) ≈ yF(t) para t > t0 + 5 τ, asumiendo que τ > 0.
Ejemplo: Transciente de un Radio con señal AM
Figura 188 Transciente de un radio con señal AM
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 409
El voltaje aplicado en la figura 188a es sinuidal con w = 15, pero esta amplitud salta
desde 6 V a 12 V en t = 0, asi que
Vs(t) = 6 cos 15 t V
t<0
= 12 cos15t V
t>0
Las formas de onda similares ocurren en señales de radio con modulación en
292
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
amplitud (AM). Nosotros necesitamos encontrar i(t) y v(t).
293
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Primero, nosotros determinamos los valores iniciales en t = 0+ asumiendo las
condiciones de estado estable para t < 0. El análisis rutinario fasorial nos
permite obtener:
I = 6/(26+j15) = 0.2 A
∠−
30 0
V = j15I = 3V ∠60 0
Asi las formas de onda para t < 0 son
i ( t) = 0.2 cos (15t -300)
v(t) = 3 cos (15t + 600) Ya que i(t) tiene continuidad,
I0 = i(0+) = i(0-) = 0.2 cos ( -300) = 0.173 A
El valor inicial de v(t) es calculado por medio de: V0 = v(0+) = vs(0+) - 26i(0+) = 7.50 V
Despues, el análisis fasorial para t > 0 nos da:
vF = 6 cos(15t + 600) De lo cual iF (0+) = 0.346 A
iF( t) = 0.4 cos (15t - 300)
+
vF(0 ) = 3 V
Finalmente, nosotros observamos del diagrama del circuito que:
τ = 1H/26Ω = 1/26 s
Despues de sustituir los resultandos en ultima ecuación suministrada, se obtiene
la respuesta completa para t > 0 como
i(t) = 0.4 cos (15t -300) – 0.173e-26t A V (t) = 6 cos (15t +600) + 4.50e-26t V
Las formas de onda dibujadas en la figura 188b muestran que la continuidad de i(t)
producen una transición suave a el nuevo estado estable ac, donde v(t) tiene
salto
inicial
discontinuo.
El
invervalo
de
transciente
aumenta rápidamente
porque los términos exponenciales casi desaparecen después de
5τ ≈ 0.2s, lo cual es cerca de medio periodo sinuidal 2π/w ≈ 0.4 s.
294
un
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 3: RESPUESTA NATURAL DE SEGUNDO ORDEN
Cuando un circuito contiene dos o más elementos que almacenan energía, el
transciente
de respuesta
puede incluir funciones
en el tiempo que decaigan
exponencialmente. En particular, circuitos con un capacitor y un inductor tiene tres
posibles tipos de comportamiento, conocidos como sobreamortiguado, subamortiguado
y amortiguado críticamente.
Ecuaciones de circuitos de segundo – orden
De acuerdo con la definición:
Un
circuito
de
segundo
orden
contiene
dos
elementos
independientes
de
almacenamiento de energía.
La definición
de elementos
independientes
de almacenamiento
de energía
singnifica que la energía almacenada por uno de ellos debe ser independiente de la
energía almacenada por el otro. Como un ejemplo simple, dos inductores
en serie conducen la misma corriente iL y no pueden no ser independientes
porque las energias 1/2L1i
2
L
y 1/2L2i L estan relacionadas.
2
Cuando los elementos que almacenan energía son independientes, el análisis de
transciente es optimizado enfocándonos en los voltajes de los condensadores y las
corrientes de los inductores. Estas variables juegan un rol crucial por dos razones:
• La energía total almacenada depende totalmente de los valores de vc y iL.
• Cualquier otra variable de interés puede ser expresada en términos de vc, iL, y la
excitación.
En vista de estas importantes propiedades se puede decir que:
Los voltajes de los condensadores y las corrientes de los inductores constituyen las
variables de estado de cualquier circuito teniendo elementos independientes de
almacenamiento de energía.
295
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El nombre variables de estado hace énfasis en el hecho de que los valores vc y
iL, junto con la excitación, completamente
determinan el estado del circuito en
cualquier instante de tiempo.
Si el circuito contiene dos elementos independientes
energía,
entonces
la respuesta
de almacenamiento
de
de cualquier variable y es gobernada por una
ecuación diferencial de segundo orden. Tal ecuación involucra la segunda derivada
d2y/dt2, escrita de una manera mas compacta en la notación doble:
Yn = d2y / dt2 = dy’/dt
Podemos usar las variables de estado para encontrar las ecuaciones diferenciales para
cualquier variable de interés en circuitos representativos de segundo orden.
Circuitos serie LRC
Figura 189 Circuito serie RLC
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 411
El inductor y el capacitor de la figura 189 son independientes, asi que iL y vc son
variables de estado. Si conocemos sus valores al tiempo de la excitación
vs,
entonces podemos calcular las variables restantes usando las leyes de Kirchoff’s
y Ohm. En particular, nosotros podemos ver que:
296
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
ic = iL
vL = vs - vR – vc = vs - RiL - vc
vR = RiL
Pero formulando las ecuaciones
diferenciales
del circuito también requiere las
relaciones de los elementos que almacenan energía:
ic = C dvc/dt = Cv’c
vL = LdiL/dt = Li’L
Insertando Cv’c en la ecuación KCL y Li’L en la ecuación KVL
obtenemos un par de ecuaciones diferenciales de primer orden: Cv’c = iL
Li’L = vs - RiL - vc
Estas ecuaciones se acoplan en que v’c depende de iL y i’L depende de vc.
Aunque un par de ecuaciones juntas de primer orden suministran una descripción de
un circuito de segundo orden, nosotros buscamos aquí una ecuación simple que
relacione las variables de estado a la excitación. Para este propósito, se diferencia
la última ecuación para obtener:
I’L = diL /dt = C dv’c/dt = Cv’’c
Entonces, después de sustituir por iL y i’L, La última ecuación se convierte en:
LCv’’c = vs - RCv’c - vc
O, despues de rearreglar:
v’’c +
R
+
L
v’c
1
vc
LC
=
1
vs
LC
Esta es la relación deseada entre vc y vs. El hecho de que la última ecuación sea una
ecuación diferencial de segundo orden confirma que los elementos que almacenan
energía son independientes.
297
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Nosotros podemos también relacionar iL a vs por la misma estrategia. Nosotros
usamos la derivada de la penúltima expresión para eliminar
v’c, para obtener:
i’’L +
R
i’L
+
L
1
iL =
LC
1
v’s
L
Esta es otra ecuación diferencial de segundo orden, donde el lado derecho
incluye la fuente derivada v’s.
Observe que las dos últimas ecuaciones han sido arregladas para que los
coeficientes de las derivadas de mayor orden
de vc o iL sean la unidad. Este
arreglo facilita la tarea de obtener ecuaciones diferenciales para otras variables. Como
un caso en este punto, suponga que nosotros necesitamos encontrar la relación
entres
el voltaje
e un inductor vL y la excitación vs en la figura 189. Habiendo
previamente encontrado que vL = vs – (RiL + vc), nosotros multiplicamos la última
ecuación por R y adicionamos la penúltima ecuación para obtener:
R
Ri’’L + v’’c +
(Ri’L + v’c)
+
L
1
(RiL + vc) =
LC
R
v’s
+
L
Sustituyendo RiL + vc = vs - vL entonces la ecuación resultante es:
V’’L +
R
+
L
v’L
1
vL = v’’s
LC
Circuito RLC paralelo:
298
1
vs
LC
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 190 Circuito RLC paralelo
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 414
El circuito de la figura 190 es el dual de un circuito serie RLC. En consecuencia,
iL y vc están relacionadas a la fuente de corriente is por
los duales de las ecuaciones anteriores, esto es:
i’’L +
1
1
i’L +
iL
RC
LC
v’’c +
1
1
v’c +
vc
RC
LC
=
=
1
is
LC
1
i’s
LC
Un repaso de los resultados nos conduce a decir que todas nuestras ecuaciones
diferenciales de segundo orden tienen la forma general:
y’’ + 2αy’ + w 2y = f(t)
Aquí α
y w
0
2
0
son constantes incorporadas a los valores de los
elementos, mientras f(t) representa el efecto de la excitación. Para este caso, el
circuito paralelo tiene y =vc, f(t) = i’s/C, y
α = ½ RC
w
2
0
= 1/LC
Un circuito serie RLC tiene:
299
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
α = R/2L
w
2
0
= 1/LC
300
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Nosotros usamos el símbolo w0 en la última ecuación porque este es igual a la
frecuencia de resonancia cuando el circuito ha exhibido propiedades resonantes.
Recopilaremos un método a usarse para obtener las ecuaciones diferenciales
de
segundo orden. Nuestro método emplea voltajes de capacitores y corrientes de
inductores como variables de estado:
1. Aplicar las leyes de Ohm’s y las leyes de Kirchoff’s para expresar ic y vL en términos
de vc, iL, y la excitación.
2. Colocar ic = Cv’c y vL =
Li’L para obtener un par de ecuaciones diferenciales de
primer orden.
3. Usar una de las ecuaciones de primer orden para eliminar una variable de estado
de las otras ecuaciones, asi se obtiene una ecuación de primer orden para vc o iL.
4. Cuando sea necesario, repetir el paso 3 para la otra variable de estado.
5. Cuando sea necesario, obtenga la ecuación para cualquier otra variable usando
las relaciones de los pasos 3 y 4.
Ejemplo: Circuito de segundo – orden con dos inductores
Sungamos que necesitamos la ecuación que relacione i2 a is en la figura
191.
No
hay condensadores aquí, asi que necesitamos encontrar las corrientes i1 y i2 y las
variables de estado y el procedimiento es como sigue:
301
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 191 Circuito de segundo orden
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 414
Paso 1: Claramente, i = is - i1 y ix = is - i1 - i2, asi las leyes de
Ohm no dan:
V2 = Rxix = Rx(is - i1 – i2)
V1 = Ri + v2 )R(is - i1) + Rx(is - i1 -i2)
Paso 2: Habilitando v2 = L2i’2
y v1 = L1i’1, nosotros obtenemos el par de
ecuaciones
L2i’2 = Rxix - Rxi1 - Rxi2
L1i’1 = (R + Rx)is - (R – Rx)i1 - Rxi2
Paso 3: Para eliminar i1 y i’1 de la segunda ecuación, nosotros reescribimos la
primera ecuación como:
I1 = is - i2 - (L2/Rx) i’2
Sustituyendo y rearreglando obtenemos:
L1 L2
i’’2 + (L1 +
Rx
R + Rx
L2 )i’2 + Ri2 = L1i’s
Rx
De donde se tienen dos implicaciones interesantes.
300
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Primero, si Rx
→∞, entonces el termino que acompaña i’’2 desaparece y
nosotros tenemos:
(L1 + L2)i’2 + Ri2 = L1i’s
La cual es una ecuación de primer orden. Esto signfica que los dos inductores no son
independientes cuando Rx se convierte en un circuito abierto. Nosotros observamos
esta conclusión al colocar ix =
0 en el diagrama del circuito, asi que i2 = i = i1 – is y la energía almacenada por L2 es
relacionada a la energía alamacenada por L2.
Segundo, con Rx finita, multiplicamos por Rx/L1L2 colocando la ecuación de segundo
orden de la forma:
I’’2 + (
Rx R + Rx
+
)i’2 +
L2
L1
RR x
i2
=
L1 L2
Rx
i’s
L2
Comparando esta ecuación muestra que:
Α=
Rx
+
R+
Rx
2L1
2L2
w02
=
RR x
L1 L2
Respuesta sobreamortiguada
La respuesta natural de cualquier variable en un circuito de segundo orden
gobernada por la ecuación homogénea obtenida en la anterior sección:
y’’ + 2αy’ + w 2y = f(t)
0
Especificamente con y = yN y f(t) = 0, nosotros tenemos
Y’’N0 + N2αy’N + w 2y
El coeficiente α y w
2
0
=0
dependen solamente de los elementos
301
es
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
particulares y las configuraciones,
a pesar de la variable bajo
302
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
consideración. Por tanto, todas las variables en un circuito dado pueden tener el mismo
tipo del comportamiento natural.
Si asumimos que la solución exponencial es yN = Aest, entonces y’N =
sAest y y’’N = s2Aest. Insertando estas ecuaciones en la última ecuación
st
nosotros
tenemos sts2 Aest + 2αs Aest + w0 Ae
2
= 0 con
Ae
≠ 0, asi
factorizando Aest obtenemos la ecuación de segundo orden:
S2 + 2αs + w
2
= 0
0
Observe que la última ecuación es idéntica a la penúltima ecuación con la derivada de
yN remplazada por s, entonces:
Y’’N → s2
y’N →s1 = s
La expression resultante del
polinomio característico,
yN →s0 = 1
lado izquierdo de la última ecuación es llamado el
y dado un circuito que tiene un y solamente una
característica polinomial.
Como ocurrió en el caso de circuitos de primer orden, la ecuación característica
determina el valor de s para la respuesta natural. Pero s ahora aparece en un
polinomio cuadrático que puede ser factorizado
como:
S2 + 2αs + w
2
0
= (s-p1)(s-p2)
Esta ecuación nos ofrece dos soluciones s = p1
y s = p2. Las cantidades p1
y p2 son las raíces de la ecuación característica, asi estas son conocidas como los
valores características. Aplicando la formula cuadrática
de la última ecuación nos
permite obtener los
valores caracteristicos:
P1 = -α +
α 2 − w0
2
p2 = -α
-
α 2 − w0 2
Ya que Aest satisface la ecuación de segundo orden con ya sea s = p1 o s = p2, se
303
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
toma la solución general de la ecuación diferencial de segundo orden la suma:
304
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
yN (t) = A1ep1t + A2ep2t ps ≠ p1
Las dos constantes A1 y A2 reflejan el hecho de que un circuito de segundo orden
contiene dos elementos independientes que almacenan energía. Por tanto, nosotros
eventualmente necesitamos dos constantes para incorporar dos condiciones iniciales.
Mientras tanto se debe tener mayor atención en los valores caracteristicos
p1 y
p2
porque hay tres diferentes casos a considerar, correspondientes a α2 >
2
2
w0 , α
< w0 y
2
α2
= w
2
.
0
Un circuito de segundo oreden conocido como sobreamortiguado tiene los valores de
los elementos tal que:
α2 > w
2
0
Se tiene también que p1 y p2 pueden
ser reales o negativos, asumiendo
que α > 0. De acuerdo con esto se introducen las constantes de tiempo:
yN(t) = A1e-t/τ1 + A2e-t/τ2
La cual consiste de dos exponenciales decayendo. La figura 192 muestra una
respuesta natural típica sobreamortiguada con τ1 > τ2, A1
< 0 , y A2 > 0.
305
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 192 Respuesta natural típica
306
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 417
El comportamiento subamortiguado siempre ocurre cuando un circuito consiste de
resistencia y ya sea dos capacitores o dos inductores, pero no fuentes controladas.
Otros
circuitos
de
segundo
orden
también pueden ser subamortiguados,
suministrando valores de elementos tales
que α2 > w 2.
0
Respuesta subamortiguada
Cuando un circuito de segundo orden contiene tanto capacitancia e inductancia,
esta ecuación característica puede tener raíces complejas. Especificamente si:
α2 < w
2
0
Entonces podemos reescribir:
P1 = - α + jwd p2 = p1* = - α - jwd
w0 − α 2
2
Donde wd =
Asi p1 y p2 son los complejos
conjugados,
con la parte real –α
y la parte
imaginaria +/- wd. Se dice que el circuito es subamortiguado porque la respuesta
natural exhibe un comportamiento oscilatorio.
Para
mostrar
que
las raíces
complejas
– conjugadas
lideran
las funciones
oscilantes en el tiempo, nosotros obtenemos:
yN(t) = A1ep1t + A2ep2t = A1e(- α + jwd)t + A1e(- α + jwd)t
= e- αt(A1e+jwdt + Ae-jwdt)
Despues, si observamos que yN ( t) deber ser una función real del tiempo, nos
lleva a obtener solamente las constantes A1 y A2 que son complejos conjugados.
Entonces podemos asumir la expresión polar:
307
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
A1 = |A1|ej ∠A1
A2 = A1* = |A1|ej- ∠A1
De donde:
yN(t) = e- αt(|A1|ej ∠A1 e+jwdt + |A1|ej- ∠A1 e-jwdt)
= |A1| e- αt[ej(wdt+ ∠A1 ) + e-j(wdt+ ∠A1 )]
Ya que ejΦ + e-j Φ =
2 cos Φ
para cualquier angulo Φ, entonces finalmente se
obtiene:
yN(t) = 2|A1| e- αtcós (wot + ∠A )
1
La figura 193 muestra el comportamiento
subamortiguado
natural descrito por
esta ecuación con α > 0. Esta forma de onda oscila a un valor wd mientras esta
amplitud decae con tiempo constante τ = 1/α . Nosotros llamamos wd la frecuencia
amortiguada y α el coeficiente de
amortiguamiento.
Figura 193 Comportamiento subamortiguado natural
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 419
LECCIÓN 4: TRANSCIENTES DE SEGUNDO ORDEN Condiciones iniciales
308
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Por definición, un circuito de segundo orden tiene dos elementos independientes que
almacenan energía. En consecuencia, un transciente de segundo orden involucra dos
condiciones iniciales. Nosotros debemos dar especial atención a la selección y calculo
de las condiciones iniciales. Normalemente
tomamos el tiempo inicial en el tiempo, t
= 0, por simplicidad, y nosotros de nuevo obtenemos y(t) para cualquier voltaje o
corriente de interés.
Una obvia condición inicial para y (t) es el valor inicial y(0+). Si nosotros conocemos los
valores de las variables de estado en t = 0-, entonces y(0+)
pueden
ser
determinados de las relacionan de continuidad familiar
Vc(0+) = vc(0-)
iL(0+) = iL(0-)
Para las otras condiciones iniciales, nosotros
Ic(t) = Cvc(t)
aprovechamos las propiedades de:
vL (t) = LiL’(t)
Asi que, nosotros conocemos los valores iniciales de las corrientes de los
capacitores
y los voltajes
de los inductores,
entonces
cuando se calculan los
derivadas iniciales:
V’c(0+) = ic(0+)/C
i’L(0+) = VL(0+)/L
De acuerdo con esto se toman las condiciones iniciales sobre y(t) para obtener:
Y’(0+) =
dy
dt
La cual es la pendiente inicial.
Los valores de y(0+) deben incluir el efecto de cualquier entrada aplicada en t =
0+ asi como la continuidad de las variables de estado. Tomando
estos
factores,
un
procedimiento
309
las
cantidades
de
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
sistemático para encontrar los valores iniciales y la pendiente para cualquier
variable y(t) nos lleva a:
1. Determinar las condiciones en t = 0- necesarias para evaluar las variables de
estado en t = 0+.
2. Tomando t > 0, escribir las ecuaciones para ic(t), vL(t) y y(t) en términos de las
variables de estado y la entrada.
3. Usar los resultados de los pasos 1 y 2 para evaluar ic(0+), vL(0+) , y y(0+). Para
entonces calcular v’c(0+) y i’L(0+).
4. Diferenciar la ecuación para y(t) obtenida en el pàso 2, y colocar t =
0+ para obtener y’(0+) de los valores de v’c(0+) y i’L(0+).
Ejemplo: Calculo de las condiciones iniciales
Figura 194 Circuito RLC serie
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 423
Si tenemos un circuito serie RLC tal como el de la figura 194 con una fuente dc de
voltaje
Vs = V1
t<0
= V2
t>0
Se necesita encontrar los valores resultantes iniciales y las pendientes para
vL, uL, vR, y vc.
310
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Paso 1: Si se asume condiciones dc de estado estable con vs = V1 para todo t < 0.
Entonces vL = 0 y ic = 0 bajo condiciones dc, la continuidad requiere que:
iL(0+) = iL(0-) = 0
vc (0+) = vc(0-) = V1
Paso 2: Observe que vs = V2 para t > 0, si se aplican las leyes de
Ohm y Kirchhoff’s se pueden escribir las ecuaciones:
vL = V2 - RiL (t) - vc(t)
vR(t) = RiL(t) ic(t) =iL(t)
En cuyo caso, el lado derecho involucra solamente las variables de estado y la entrada
de voltaje.
Paso 3: Si se coloca t = 0+ en las ecuaciones para obtener los valores iniciales
vL(0+) = V2 - RiL(0+) - vc(0+) = V2 - V1
ic(0+) = iL(0+) = 0
vR(0+) = RiL(0+) = 0
Y se pueden calcular las pendientes:
I’L (0+) =
v L (0+
)
L
=
V2
− V1
L
v’c(0+)
=
=c
i (0 + )
C
0
Paso 4: Se diferencia la ecuación para vL(t) y vR(t), y se habilita t =
0+ para obtener las pendientes restantes:
V’L(0+) = -Ri’L(0+) - v’c(0+) = - R(V2 – V1)/L V’R(0+) = Ri’L(0) = R(v2 – v1)/L
Transcientes de conmutaciones DC
Si consideramos un circuito de segundo orden con energia almacenada en t = 0 y
una excitación dc para t >0 . Siendo la función forzada constante para t > 0,
entonces el comportamiento de
311
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
cualquier variable y(t) es gobernada por una ecuación diferencial
teniendo la forma:
2
Y’’ + 2 αy’ + w0 y = w0 Yss
2
t >0
La constante del lado derecho has sido escrita como w 2Yss para hacer
énfasis en que
0
Yss es igual al resultado del valor de estado estable de y(t). Esta interpretación sigue
el hecho de que yn = y’ = 0 en el estado
estable dc. Asi la ultima ecuación se reduce a w0 y = w0 Yss y y(t) =
2
2
Yss.
La solución completa de la última ecuación consiste de la repuesta forzada de
estado estable Yss más la respuesta natural. Tomamos la expresión general para
transcientes de conmutaciones dc como:
Y(t) = Yn + yN(t)
t >0
Esta ecuación incluye la respuesta de entrada cero si de tiene Yss = 0. La última
ecuación también incluye la respuesta paso si se mantiene la energía almacenada
inicial igual a cero.
Como aprendizaje previo, los valores caracteristicos del circuito p1 y p2 determinan los
componentes específicos de yN(t) en la ultima ecuación. Sin embargo, yN(t) siempre
contiene
dos
constantes
que
deben
ser evaluadas para agregarse con las
condiciones iniciales y(0+) y y’(0+)
determinadas por la energía almacenada inicialmente.
Caso 1: Circuitos sobreamortiguados. Si α2 > w
2
0
es sobreamortiguado y los valores caracteristicos son:
P1 = --α +
α 2 − w0
p2 = -α
-
2
Por tanto, yN ( t) = A1ep1t + A2ep2t,y
Y(t) = Y0 + A1ep1t + A2ep2t
t>0
312
α 2 − w0 2
entonces el circuito
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde p1 y p2 son reales pero no iguales.
313
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Para propósitos de evaluar A1 y A2, primero se coloca t = 0+ en la última
ecuación para obtener:
Y(0+) = Yn + A1 + A2
Despues diferenciando la última ecuación y colocando t = 0+ se obtiene:
Y’(0+) = p1A1 + p2A2
Reorganizando las ecuaciones simultáneas en una matriz obtenemos:
1
1
A1
p1
p2
A2
=
y(0 + ) − Yss
y' (0+)
Esta ecuación puede ser resuelta para A1 y A2.
Caso II. Circuitos subamortiguados
Si α2 < w
2
0
, entonces el circuito es subamortiguado y las raíces son
conjugadas complejas, esto es:
p1,p2 = -α +/- jwd
w
0 −α2
2
wd =
Pero aun teniendo raíces desiguales, la ultima ecuación aun tiene en este caso que
incluir p1 = -α + jwd p2 = -α - jwd.
Sin embargo, las constantes de las condiciones iniciales son complejos conjugados, y
nosotros solamente necesitamos evaluar A1 porque podemos expresar la respuesta
natural en la forma yN ( t) = 2|A1|e-αt
cos(wdt + ∠A1 ). Asi:
Y (t) = Yss + = 2|A1|e
-αt
cos(wdt + ∠A ) t > 0
1
El requerimiento correspondiente es que A2 = A1*. Caso III. Cicuitos críticamente
amortiguados
Si α2 = w
2
0
, entonces el circuito es críticamente amortiguado y :
310
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
p1 = p2 = -α
El determinante característico es ∆ = p2 – p1, la cual es igual a cero cuando las
raíces son repetidas.
En
cambio,
nosotros
-αt
tiene yN(t) = A3 e
recordamos
que
un
circuito
críticamente amortiguado
-αt
+ A4 e , asi que:
Y(t) = Yss + A3 e-αt + A4t e-αt
t>0
Diferenciando entonces obtenemos:
Y’(t)= = -α A3 e-αt + A4t e-αt - -α A4 te-αt
Por tanto lãs constantes A3 y A4 deben ser:
A3 = y(0+) – Yu
A4 = y’(0+) + α A3
De lo cual se sigue directamente que t = 0+ en y(t) y y’(t).
Ejemplo: Respuesta subamortiguada a entrada – cero
Tomando un circuito serie como el de la figura 194 tenemos que : L =
0.1 H , R = 5 Ω, y C = 1/640 F. Entonces α = R/2L = 25, w0
= 1/LC =
2
6400, y los valores caracteristicos son
p1,p2 = -25 +/- j76
Podemos encontrar el transciente de la corriente del inductor iL para t >
0 cuando
Vs(t) = 30 V
t<0
=0V
t>0
Nosotros asi tratamos con una repuesta subamortiguada de entrada cero.
Para las condiciones iniciales sobre iL, Al mostrar los resultados del ultimo ejemplo
con V1 = 30 V y V2 = 0. Se tiene:
iL (0+) = 0 i’L(0+) = -30/L = -300 A/s
311
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La pendiente inicial refleja el hecho de que el capacitor inicialmente se descarga a
través del inductor. Eventualmente, por tanto iL
va a el valor de estado estable Iu
= 0.
Despues incluyendo los valores numéricos en la matriz de ecuaciones para el caso 1:
1
1
− 25 + j76
A1
=
i L (0 + ) − Iu
+
− 25 − j76
A2
i' L (0
)
=
0
− 300
Los determinantes relevantes son encontrados al ser ∆ = -j152 y ∆1 =
300, asi que
A1 = 300/(-j152) = 1.974 A ∠90 0
Tenemos entonces que:
iL (t) = 3.95 e-25t cos (76t + 900)A
t>0
La forma de onda mostrada en la figura 195 ilustra el comportamiento oscilante
aparece en un transciente de subamortiguado de segundo orden.
Figura 195 Comportamiento subamortiguado de segundo orden
Fuente: CALSON A. BRUCE. Circuits. Brooks/Cole.2000. Pag 427
312
que
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
UNIDAD 4: INSTRUMENTACIÓN
CAPITULO 10: CIRCUITOS ELÉCTRICOS EN EQUILIBRIO
LECCIÓN 1: PUENTE DE WHEATSTONE
Los sensores más comunes que podemos encontrar son los resistores. Estos además
de ser económicos son fáciles de emplear con circuitos de acondicionamiento. En las
RTDs y en las galgas se tiene un cambio porcentual pequeño porcentual en la magnitud
de la resistencia en respuesta a un cambio en una variable física como es la
temperatura o la fuerza. Por ejemplo si se tiene una RTD de platino de 100 Ω con un
coeficiente de temperatura de 0.385%/0C, de forma que para medir
10C, se tiene una exactitud en la medida mejor que 0.385 Ω. Las galgas
presentan un cambio típico menor del 1 % del valor nominal de resistencia.
Una forma sencilla para medir resistencia es forzar una corriente constante a través
del sensor resistivo y realizar la medición de la tensión de salida. Se necesita
entonces que la fuente de corriente y la medida de tensión sean suficientemente
exactas.
Si se tiene otra variación en la corriente será interpretado como un cambio en la
resistencia. De otra manera la disipación de potencia en el sensor resistivo debe ser
baja para no permitir errores en la medida por el autocalentamiento. En consecuencia
la fuente de corriente debe ser de valor pequeño, limitando la resolución de la medida.
El puente resistivo que se muestra en la figura 196 (conocido como puente de
Wheatstone)
es una forma alternativa de medir pequeños
313
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
cambios de resistencia. Al tenerse una variación en el valor inicial
de una o varias
de las resistencias del puente, como consecuencia de la variación de una magnitud
física, se detecta en el puente como un cambio de tensión de salida. Debido a que
los cambios en la resistencia son muy pequeños, los cambios en la tensión de salida
pueden ser tan pequeños como decenas de mV, lo que obliga a amplificar la señal de
salida del puente.
.
Figura 196 Puente de Wheatstone
314
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La diferencia de potencial entre los puntos c y d nos indicará la corriente a través
del galvanómetro. Si se tiene una la diferencia de potencial de cero, no se tendrá
paso de corriente por el instrumento, se dice entonces que el puente está equilibrado o
balanceado, para que se cumpla esta condición, se debe cumplir que:
Vca = Vda
y
Vcb = V bd
Donde Vca = I1R1 y Vda = I2R2
Por tanto I1R1 = I2R2
(Ec. 1)
Si por el instrumento de medición (G) no se tiene paso de corriente:
I 1 = I3 =
Vcc
R1 +
R3
y
=
Vcc
R2 + R4
I2 = I4
Remplazando en la (Ec. 1):
VccR1
=
R1 + R3
Simplificando:
VccR2
R2 + R4
R2
R2 + R4
R1
=
R1 + R3
315
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
De donde: R1R4 = R2R3
316
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Si se conoce el valor de 3 resistores el cuarto valor puede encontrarse
empleando la expresión anterior, Si R4 es la resistencia desconocida:
R2R3
R1
R4 =
R3 se conoce como rama patrón, y las resistencias R2 y R1 se denominan ramas
de relación.
La figura 197 ilustra cuatro casos típicos de puentes alimentados en tensión que
frecuentemente se presentan en la práctica. La tensión de salida del puente
depende de la tensión de alimentación, por tanto la exactitud de la medida no
puede ser mejor que la exactitud de la tensión de excitación.
El caso (A) en el que varía sólo un elemento, es el más adecuado para la medida
de temperatura con RTDs o termistores. También para medidas de deformación
con una sola galga. Observamos que la relación entre la salida del puente ∆R no es
lineal. El caso (B) se tienen con dos galgas iguales montadas adyacentemente, con sus
ejes en paralelo. La no linealidad es igual que en el caso (A), pero la sensibilidad
es el doble. Este tipo de puente con dos elementos variando es típico de sensores
de presión y de flujo. En el caso (C) se tienen dos elementos idénticos que varían
en direcciones opuestas. Es el caso de dos galgas una montada en la parte superior
de la superficie flexible y otra en la parte inferior. La configuración (D) es una de las
más populares. La señal de salida es la mayor de todas para un cambio de
resistencia y es inherentemente lineal. Es una configuración típica de las células de
carga.
La sensibilidad del puente se calcula como la derivada de la salida respecto a la
variación de resistencia. Vemos que es proporcional a la tensión de
317
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
alimentación y se incrementa a medida que el puente tiene más elementos que varían.
Figura 197 Puentes alimentados por tensión
Figura 198 Puentes alimentados con fuentes de corriente
Es posible que los puentes resistivos
sean alimentados
por una fuente de
corriente constante, como se muestra en la figura 198 Estas configuraciones, no son
tan populares como las alimentadas por tensión. Una ventaja que presentan es que
cuando el puente está localizado remotamente de la fuente
318
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
de excitación, la resistencia del cableado no introduce errores en la medida. De otro
modo el cableado es más simple. Note también que salvo el caso (A) todas las
configuraciones son lineales.
Además del número de elementos que varían en el puente, en el diseño de un puente
resistivo hay que tener en cuenta otras cuestiones como el tipo de excitación y su
estabilidad. Aunque tensiones de excitación altas dan lugar a tensiones
de salida
altas, la disipación de potencia es también alta, con posibilidad de errores por
auto-calentamiento de la resistencia del sensor. Por el contrario, valores de la tensión
de excitación bajos requieren más ganancia en el circuito de acondicionamiento, lo
cual incrementa la sensibilidad a errores debidos a señales de pequeño nivel como
ruido y tensiones de offset. Por otro lado la estabilidad de la tensión o de la
corriente de excitación afecta directamente a la exactitud de la salida del puente,
por lo que se deben emplear referencias de tensión o de corriente estables.
Para amplificar la salida del puente lo mejor es utilizar un amplificador de
instrumentación (AI) como se muestra en la figura 199, en la que RG determina la
ganancia.
Como el AI proporciona una alta impedancia entre cada nodo de salida del puente
y masa no desequilibra el puente ni lo carga. El AI permite obtener ganancias
entre 10 – 1000 con excelente CMRR, sin embargo la salida aún no es lineal. Se
puede linealizar la salida del puente por software conectando la salida del AI al CAD
de un microcontrolador.
La alimentación del AI puede ser dual (figura 199 superior) o simple con -VS=0 (figura
199 inferior). En este último ejemplo la tensión del pin REF del AI tiene que ser
elevada al menos 1V. En el ejemplo se utiliza una tensión de referencia de 2V de
forma que la salida del AI esté entre 2V±1V, que corresponde al margen de entrada
del CAD.
Se pueden utilizar varias técnicas para linealizar la tensión salida del puente (ojo,
esto no quiere decir que se linealice el sensor). La figura 200 de la izquierda
muestra un primer método, en el cual el puente debe estar “abierto” en uno de los
nodos donde va a conectarse el sensor, lo que obliga a disponer
319
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
de cinco terminales accesibles. El circuito de la derecha de la figura 200 permite
superar esta circunstancia, a costa de añadir otro amplificador operacional.
requiere
alimentación
dual
y
además
una
relación
ajustada y estable. Se recomienda utilizar operacionales de
precisión.
Figura 199 Amplificación de la salida del puente
320
Se
de resistencias R1-R2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 200 Linealización de la tensión de salida
Se puede utilizar el esquema de la izquierda, de la figura 201 similar al visto para
un solo elemento resistivo variable. Para la misma tensión de alimentación ahora la
sensibilidad del conjunto es el doble. Se requiere una fuente doble y una ganancia
adicional.
El esquema de la derecha de la figura 201 utiliza un operacional, una resistencia
de medida y una referencia de tensión. El objeto del bucle es mantener una
corriente constante de valor IB = VREF/RSENSE a través del puente. La corriente a
través de cada uno de los brazos del puente se mantiene constante e igual a IB/2, por lo
que la salida es lineal con ∆R. El AI proporciona una ganancia adicional.
Los
principales
problemas
asociados
con
los
puentes
de
medida
localizaciones remotas son la resistencia del cableado de conexión y la tensión
320
en
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
de ruido inducida. Para cuantificar el error que se comete en la medición
considere una galga de 350 Ω, conectada al resto del circuito puente por un par
trenzado de 100 ft (1 ft=0,30 m) de longitud. La resistencia eléctrica del cable de
conexión a 25 ºC es 0,105 Ω/ft y el coeficiente de temperatura del cobre
0,385%/ºC.
Calcular
el error en la ganancia
y en el offset debido a un
incremento en la temperatura de 10 ºC.
Figura 201
El efecto de la resistencia
del cable en la tensión de salida puede ser
minimizado con la conexión a tres hilos de la figura 202. Se supone que se mide la
tensión de salida del puente con un dispositivo de alta impedancia, por lo que no
circula corriente por el cable de medida
321
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 202 Conexión a tres hilos
LECCIÓN 2: PUENTE KELVIN
Consiste en una variación del puente de Wheatstone, es emplado frecuentemente
la medición de resistencias
en
de bajo valor, su estructura se muestra en la figura
203
FUENTE:
COOPER,
HELFRICK,
“INSTRUMENTACIÓN
ELECTRÓNICA
MODERNA Y TÉCNICAS DE MEDICIÓN”, PRENTICE HALL.
FIGURA 203 PUENTE DE KELVIN
El galvanómetro de medición no tendrá un punto fijo de conexión teniendo 2 puntos
posibles m o n.
322
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Si el punto de conexión es m, el valor de Rx se aumentará en un valor de Ry
(resistencia del alambre), si el punto de conexión es n, el valor de R3 aumentará
debido a Ry; y el valor de Rx disminuirá. Si tomamos la ecuación de
equilibrio para el puente:
R1
(R3 + Rmp)
R2
Rx +/- Rnp =
Si se conecta el galvanómetro en el punto p, entre m y n, de manera que la razón
de la resistencia de n a p y m a p iguale la razón de los resistores R1 y
R2, entonces, tenemos que:
R1
Rnp
=
Rmp
R2
Por tanto:
R1
)=
R1 + R2
Rx + Ry (
R1
(
R2
[R3 +
R2
R1 +
R2
)Ry]
Simplificando:
Rx =
R1
R3
R2
Esto nos muestra que si se conecta el galvanómetro en la posición intermedia p, se
elimina el efecto de la resistencia del alambre de conexión del punto m al punto p.
323
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
METODO KELVIN
Diferentes puentes de medida involucran cuatro elementos resistivos sensibles (p.e las
células de carga) y encapsulados en un único componente, con seis terminales
accesibles: dos para la salida, dos para la excitación y dos para el sensado. Este
esquema se muestra en la figura 204 y se conoce cómo método Kelvin.
Si bien este método elimina los errores debidos a la caída de tensión en la resistencia
del cable del puente, se necesita que la tensión de alimentación sea muy estable ya
que afecta directamente a la tensión de salida. Además, los operacionales deben
tener baja tensión de offset, bajas derivas y bajo ruido.
Adicionalmente se puede conectar la VB a la entrada de referencia de un ADC. Este
actúa como un divisor (con salida digital) entre su tensión de entrada (la salida del
puente es proporcional a la tensión de alimentación) y la tensión de referencia. De esta
manera la fuente de alimentación no se requiere que sea muy estable. A este tipo de
medidas se las denomina ratio métricas o medidas por relación.
324
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Figura 204 Metodo Kelvin
Otra manera para minimizar el efecto que la resistencias es la conexión a cuatro
hilos es el de la figura 205, en la que el puente se excita con una fuente de corriente.
Tiene la ventaja de que sólo utiliza un amplificador, pero puede requiere un buffer de
corriente para poder proporcionar corrientes por encima de unos pocos mA.
Figura 205 Conexión a cuatro hilos
325
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 3: PUENTE DE MAXWELL
Es utilizado para la medición de inductancias de valor desconocido, teniéndose un
valor conocido de capacitancia. Su estructura se muestra en la figura
206:
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 206 PUENTE DE MAXWELL
Tomando la ecuación de equilibrio para el puente:
ZXY1 = Z2Z3 o Zx = Z2Z3Y1
1
+ jwC1
R1
Para la rama 1 se tiene la admitancia Y1 =
326
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
1
+ jwC1)
R1
Remplazando: Zx = Rx + jwLx = R2R3(
Separando partes reales e imaginarias:
Rx =
R2R
3
R1
y Lx = R2R3C1
El puente de Maxwell tiente un buen desempeño para medición de bobinas con
Q medio. Entre 1 y 10.
Teniendo
un
inductor
real,
el
cual
puede
representarse
mediante
una
inductancia ideal con una resistencia en serie (Lx, Rx), la configuración del puente
de Maxwell permite determinar el valor de dichos parámetros a partir de un conjunto
de resistencias y un condensador, ubicados de la forma mostrada
en la Figura 207.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 207. PUENTE DE MAXWELL PARA MEDIR LOS PARÁMETROS DE UN
INDUCTOR
327
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El hecho de utilizar un capacitor como elemento patrón en lugar de un inductor tiene
ciertas ventajas, ya que el primero es más compacto, su campo eléctrico externo es
muy reducido y es mucho más fácil de blindar para protegerlo de otros campos
electromagnéticos.
La relación existente entre los componentes cuando el puente está balanceado es la
siguiente:
En primer lugar, podemos observar que los valores de Lx y Rx no dependen de la
frecuencia de operación, sino que están relacionados únicamente con los valores
de C1 y R1, R2 Y R3.
Por otra parte, existe una interacción entre las resistencias de ajuste, ya que tanto
R1 como R3 intervienen en la ecuación de Rx, mientras que en la de Lx solo
interviene R3.
De acuerdo con esto, es necesario realizar varios ajustes sucesivos de las dos
resistencias variables hasta obtener la condición de cero en el detector. Por lo tanto, el
balance de este tipo de puente resulta mucho más complejo y laborioso que el de
un puente de Wheatstone de corriente continua.
328
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El puente tipo Maxwell también se emplea para determinar el valor de condensadores
reales cuyo modelo circuital consta de una conductancia ideal en paralelo con una
resistencia que representa las pérdidas óhmicas. La
configuración del circuito en este caso es la presentada en la Figura 208.
Figura 208 Puente de Maxwell
329
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La ecuación en la condición de equilibrio es:
330
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Como en el caso anterior, los valores de Cx y Rx son independientes
de la
frecuencia, e igualmente existe interacción entre los elementos de ajuste, debido a
que ambos aparecen en la expresión de Rx.
Si los parámetros de ajuste fuesen R1 y C1 en lugar de R1 y R3, desaparecería la
interacción presente actualmente. La desventaja de un puente en el que el elemento
variable es un condensador es el hecho de que resulta difícil hallar capacitancias
variables de precisión con valores comprendidos dentro de un rango adecuado para
poder hacer un diseño de este tipo.
La configuración del Puente de Maxwell ofrece muy buenos resultados siempre y
cuando la Q del circuito no sea demasiado grande, esto es, mientras Rx del inductor no
330
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
sea muy pequeña o Rx del condensador no sea excesivamente
331
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
grande, ya que en caso contrario, R1 debería tomar valores mayores que los que
ofrecen las resistencias de ajuste disponibles. En estos casos es necesario utilizar otro
tipo de configuración, que analizaremos a continuación.
LECCIÓN 4: PUENTE DE HAY, SCHERING Y PUENTE WIEN PUENTE DE
HAY
La configuración de este tipo de puente para medir inductores reales, cuyo modelo
circuital consta de una inductancia en serie con una resistencia es la
mostrada en la Figura 209
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 209. PUENTE DE MAXWELL PARA MEDIR LOS PARÁMETROS DE UN
CONDENSADOR.
La ecuación de balance para este puente es la siguiente:
331
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Esta ecuación puede separarse en las siguientes:
332
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
De donde:
Como podemos observar, los valores de Lx y Rx además de depender de los
parámetros
del
puente,
dependen
de
la
frecuencia
de
operación
y
las
expresiones para calcular Lx y Rx son complejas.
Ahora bien, en el punto anterior indicamos que esta configuración la vamos a utilizar
cuando el valor de Q sea elevado, ya que en caso contrario es conveniente
emplear el puente de Maxwell.
Como Q=1/wC1R1, cuando Q>>l, podemos considerar que los denominadores tanto de
Lx como de Rx son igual a 1, sin introducir en la medición del inductor
333
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
un error mayor que el debido a la exactitud con la que se conoce el valor real de los
otros elementos del puente. Con esta aproximación, las fórmulas para Lx y Rx son:
Utilizando estas relaciones se puede calcular el valor de Lx y Rx en forma mucho
más directa. Podemos considerar que a partir de Q=10, este valor es lo suficientemente
grande como para realizar la aproximación.
Para medir condensadores reales, cuya representación circuital es una Capacitancía en
paralelo con una resistencia, la configuración del puente de Hay es la mostrada en la
Figura 210
Figura 210 Puente de Hay
Las relaciones que se cumplen cuando el puente está balanceado son:
334
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
De donde:
Despejando Cx y Rx obtenemos:
Como en el caso anterior, si Q>>1, las ecuaciones de Cx y Rx se pueden
simplificar de la siguiente forma:
335
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
PUENTE DE SCHERING
Es empleado este puente para la medición de capacitores. Su estructura se muestra
en la Figura 211:
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 211. PUENTE DE SCHERING
En la rama 3 del circuito se ubica un capacitor normalmente de mica de alta calidad
o un capacitor de aire para mediciones de aislamiento.
De la ecuación de equilibrio general del puente:
336
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Zx = Z2Z3Y1
Donde:
j
wCx
Zx = Rx -
Y1 =
1
+ JWC1
R1
Por tanto:
Rx -
j
= R2(wCx
j
)(
wC3
R1
1
+ jwC1)
Multiplicando:
Rx -
j
=
wCx
jR2
wC3R1
R2C1
C3
Igualando componentes reales e imaginários:
Rx = R2
C1
C3
y
R2
Cx = C3
R1
El ajuste de equilibrio del puente se hace mediante C1 y R2.
El factor de potencia (PF), de un circuito serie RC se define como:
337
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
PF =
Zx
Rx
338
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Para ángulos de fase cercanos a 900, la reactancia es casi igual a la
impedancia y se aproxima a :
Rx
= wCxRx
Zx
PF =
En un circuito RC el factor de disipación (D), es por definición:
D =
Xx
Rx
1
= wCxRx =
Q
El factor de disipación es un indicador de la calidad del capacitor.
Teniendo en cuenta que:
Rx =
D =
C3R2
R2C
1
C3
wR2C1C3R1
y
=
C3R1
R2
Cx
= WR1C1
PUENTE WIEN
Es útil para la medición de frecuencia, además es empleado en osciladores de audio
339
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
y HF como elemento que determina la frecuencia, también es empleado
340
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
en los analizadores de distorsión armónica donde se usa como filtro pasa banda.
La estructura del puente se muestra en la figura 212
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 212. PUENTE DE WIEN
Donde:
Z1 =
R1 -
j
y
wC1
Y3 =
1
+ JWC3
R3
Tomando la ecuación de equilibrio del puente y remplazando los valores
apropiados:
341
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
R2 = (R1 -
j
)R4(
wC1
R3
1
+ JWC3)
Desarrollando la ecuación:
R2=
R1R
4
R3
+ JWC3R1R4
-
R4C3
C1
jR4
+
wC1R3
Tomando la parte real:
R2 =
R4C3
C1
R1R4
+
R3
Simplificando
R2
=
R4
R1
C3
+
R3
C1
Para la parte imaginaria:
R4
wC1R3
WC3R1R4 =
342
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde w = 2πf
343
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Despejando
1
f =
2π C1C3R1R3
La condición de equilibrio esta determinada entonces si se cumplen la ecuación que
relaciona las resistencias del circuito y se tiene una señal de entrada con una
frecuencia que cumpla con la expresión anterior.
Normalmente se emplea: R1 = R3 y C1 = C. Esto no lleva a R2/R4 = 2 y
f
=1/2πRC.
LECCIÓN 5: CONDICIONES DE EQUILIBRIO DE LOS PUENTES, APLICACIÓN DE LA
ECUACIÓN DE EQUILIBRIO
La estructura del puente de mediciones de a. c. es similar al puente de d.c., un
generador, un detector de cero y 4 ramas.
El detector de cero actúa conforme se tengan corrientes de desequilibrio, normalmente
se emplea un par de audífonos, un amplificador de c.a. con un medidor de salida o un
tubo de rayos catódicos como detector de cero.
La estructura del puente se muestra en la figura 213, con sus 4 ramas y el
detector de cero, el puente se encuentra en estado de equilibrio si la corriente a través
del detector es cero.
340
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 213 CONDICIÓN DE EQUILIBRIO
Para ajustar el equilibrio
del puente se debe variar una o más ramas. Para
encontrar la ecuación general para el equilibrio del puente se debe tener en cuenta
que las cuatro ramas presentan un valor de impedancia. Para la condición de
equilibrio:
Eac = 0 (en magnitud y fase)
Para esto se debe cumplir que: EBA = EBC
De donde:
341
o
I1Z1 = Z2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
I1 =
E
Z1 + Z
3
E
Z2 + Z4
y I2
=
Remplazando: Z1Z4 = Z2Z3
Para el caso en que se empleen admitancias:
Y1Y4 = Y2Y3
Teniendo en cuenta que se trata de cantidades complejas, su expresión en forma
polar es:
(Z1 θ 1)(Z4 θ 4 ) = (Z2 θ 2 )(Z3 θ 3 )
Tomando en cuenta las características de los números complejos:
Z1Z4 θ 1+ θ 4
= Z2Z3 θ
2
+ θ3
Se generan 2 condiciones a satisfacer para que el puente este en equilibrio:
Z1Z4 = Z2Z3
producto de magnitudes de ramas puestas
342
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
θ 1+ θ 4
=θ
+θ
2
3
suma de ángulos de fase de las ramas opuestas
343
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CAPITULO 11: DIGITALIZACIÓN DE SEÑALES
LECCIÓN 1: TRANSFORMACIÓN DE UNA SEÑAL ANALOGICA A DIGITAL Y
VICEVERSA
SISTEMAS MUESTREADOS
Involucrandonos
en
reemplazar
magnitud
la
la instrumentación
continua
por
digital,
una
muestrear
una señal
secuencia
de
implica
números
que
representan los valores de dicha señal en determinados instantes. Un sistema
muestreado
es aquel que, partiendo de una señal o magnitud analógica o
continua es capaz de generar una secuencia de valores discretos, separados a
intervalos de tiempo.
El muestreo es la característica fundamental de los sistemas de control digital, dada la
naturaleza
discreta
de
los
dispositivos
que
realizan
el
proceso
de control.
Generalmente la señal continua es convertida en una secuencia de números que
son procesados por el computador digital.
El computador da una nueva secuencia de números, los que son convertidos a una
señal continua
reconstrucción
y aplicada al proceso.
de la señal.
Dada
Este segundo proceso se denomina
la importancia
del muestreo
es necesario
conocer a fondo este proceso. La Figura 214 y 215 muestra la forma en que se realiza
el muestreo.
344
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB
FIGURA 214 UNA SEÑAL DE FUNCIÓN Y(t) ENTRA A UN MULTIPLICADOR
MUESTREADOR
REPRESENTACIÓN
ESQUEMÁTICA
DEL PROCESO
DE
MUESTREO DE UNA SEÑAL ANÁLOGA
Existe un primer elemento llamado muestreador que congela un instante el valor
de la señal a muestrear, pero la salida del muestreador sigue siendo analógica.
Para convertir esta señal a un valor numérico esta el conversor analógico digital.
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB
345
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FIGURA 215
SEÑALES GENERADAS A PARTIR DEL PROCESO DE MUESTREO
DE UNA SEÑAL ANÁLOGA.
En el ejemplo se ha dibujado ex-profeso el muestreo con tiempos diferentes pero lo
más común es muestrear con un período constante Tm llamado período de muestreo.
Si bien se han dibujado separados, el muestreador y el conversor normalmente están
juntos en un mismo elemento.
Lo que conviene reiterar es que el proceso no sufre alteración alguna y si éste era
continuo lo seguirá siendo. Para mayor claridad, se muestra en la Figura
216 cómo sería la generación de una señal de control discreta y en la Figura
217 se observan las diferentes señales.
A los fines del análisis es útil tener una descripción del muestreo. Esta acción significa
simplemente reemplazar una señal por su valor en un número finito de puntos. Sea k el
conjunto de números enteros. El muestreo es una operación lineal. El período de
muestreo es normalmente constante o sea t = kTm. En estas condiciones se llama
muestreo periódico y Tm es llamado período de
muestreo.
A fs =
1
Hz
Tm
se le denomina frecuencia de muestreo.
Son usados también otros esquemas de muestreo mas sofisticados. Por ejemplo,
muestrear diferentes lazos con diferentes períodos de muestreo. Este caso se
denomina muestreo múltiple y puede ser tratado como superposición de varios
muestreos periódicos.
346
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB
FIGURA 216 DIAGRAMA DE BLOQUES DE UN CONTROLADOR DIGITAL.
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB FIGURA 217
MUESTREO DE UNA SEÑAL CONTINUA.
El caso del muestreo periódico ha sido estudiado profundamente. Mucha teoría está
dedicada a este tema pero el muestreo múltiple está cobrando importancia día a día
con el uso de sistemas multiprocesadores. Con el software moderno es
347
posible
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
diseñar un sistema como si fuesen varios procesos trabajando
348
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
asincrónicamente.
La
señal
continua
y(t)
se
convierte
en
una
secuencia
mediante el muestreador y el CAD que normalmente es el elemento más lento de la
cadena.
Ya dentro del computador se genera la secuencia de control u. Este proceso consume
un determinado
tiempo Tc. Mediante el CDA la secuencia se convierte en
analógica y por último el bloqueador o Retenedor interpola los valores de la señal
entre dos períodos de muestreo. El bloqueador más usual es aquel que mantiene el
valor de la señal hasta la siguiente muestra llamado retenedor de orden cero.
TEOREMA DEL MUESTREO
Si el muestreo es suficientemente pequeño no se pierde casi información pero ésta
pérdida puede ser importante si el período de muestreo es muy grande. Es,
entonces, esencial saber cuando una señal continua es biunívocamente definida por
su muestreo. El siguiente teorema da las condiciones para el muestreo.
Una señal continua con espectro en frecuencia nulo fuera del intervalo [-ω0, ω0] es
reconstruible
totalmente
si se la muestrea
con
una
reconstrucción se obtiene mediante el siguiente cálculo:
La frecuencia ωs/2 recibe el nombre de Frecuencia de Nyquist.
349
frecuencia
ωs>2.
La
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
RECONSTRUCCIÓN DE SENALES
Si se quiere saber cómo es la señal continua a partir de la información que brinda
la secuencia de muestras es necesario un proceso llamado de reconstrucción. En este
proceso es posible que la señal reconstruida no coincida exactamente con la
original. Esto se ve en la figura 218
La pregunta
es cuán parecida será la señal reconstruida
a la original.
Todo
dependerá del reconstructor que se utilice.
RECONSTRUCCIÓN IDEAL
Para el caso de señales con ancho de banda limitado, se puede reconstruir a partir
de la última ecuación. La desventaja es que esta operación no es causal y se deben
conocer los valores anteriores y posteriores al instante tratado. Esto no
es
conveniente para el control digital, pero si puede ser útil en comunicaciones
donde se puede aceptar un retardo. Otra desventaja es su complicado cálculo y
que solo es aplicable al muestreo periódico.
350
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB
FIGURA 218
PROCESO DE RECONSTRUCCIÓN DE UNA SEÑAL
ANÁLOGA.
RECONSTRUCCIÓN DE LA SEÑAL TRIANGULAR CON UNA FRECUENCIA DE
SEÑAL MUESTREADORA DE 100K CON AMPLITUD 5VPP
Esta reconstrucción es no causal y en la gráfica 219 se muestra el resultado del
proceso; la línea suave es la señal continua (color violeta) y la ondulada es su
reconstrucción
(color
verde).
Se
muestran
además
los
aportes
de
cada
elemento de la sumatoria. La reconstrucción no es perfecta ya que no se consideraron
infinitos términos de la sumatoria.
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB FIGURA 219.
RECONSTRUCCIÓN IDEAL DE UNA SEÑAL
BLOQUEADORES.
La reconstrucción anterior no es útil para aplicaciones en Instrumentación y
351
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
demasiado costosa desde el punto de vista de cálculo. Es por esto que se
352
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
eligen métodos más simples. El más usual es el bloqueador de orden cero o
retenedor que consiste en mantener la señal en el mismo valor de la última
muestra.
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB
FIGURA 220
RECONSTRUCCIÓN
DE UNA SEÑAL CON RETENEDOR DE
ORDEN CERO
Dada su simplicidad este bloqueador ZOH es el más usado en control digital y los
CDA estándares son diseñados con este principio. Obviamente ésta reconstrucción
introduce un error como se puede ver en la figura 220 Otro bloqueador causal es
el que se construye
considerando
las dos últimas muestras
y extrapolando
linealmente el comportamiento futuro que es el retenedor de Primer Orden o FOH.
APARICIÓN DE FRECUENCIAS ESPURIAS
350
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Lo que dice el teorema del muestreo es que si la frecuencia de muestreo es inferior a la
máxima frecuencia del sistema continuo la reconstrucción ya no es posible debido a la
superposición de los lóbulos. Un ejemplo es lo que sucede
al muestrear la señal de la figura 221
FUENTE: GRAFICA CONSTRUIDA EN SIMULINK DE MATLAB FIGURA 221
APARICIÓN DE FRECUENCIAS ESPURIAS
Una posible solución es incrementar la frecuencia de muestreo pero esto trae dos
problemas:
1) Si se observan los elementos de la transformada en Z, estos varían con el período de
muestreo y en particular las raíces de los polinomios tenderán todas a 1, esto llevará a
errores numéricos indeseados.
2) En el caso de que se elija una frecuencia suficientemente alta respecto de las
frecuencias propias de la planta, puede ser que no sea lo suficientemente alta con
respecto
a alguna perturbación
y el muestreo
componentes de baja frecuencia.
351
de esta perturbación introduzca
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Estas señales que aparecen reciben el nombre es frecuencias alias y la única forma de
evitarlas es filtrar la señal antes del muestreo.
LECCIÓN 2: CIRCUITOS DE MUESTREO Y RETENCIÓN
Los circuitos de muestreo y retención (Sample and Hold, S&H) se usan ampliamente
en el procesado de señales analógicas y en sistemas de conversión de datos
para almacenar de forma precisa, una tensión analógica durante un tiempo que puede
variar entre menos de 1µseg y varios minutos.
Aunque
conceptualmente
son
simples,
sus
aplicaciones
están
llenas
de
sutilezas y en general las aplicaciones que necesitan solamente una velocidad
moderada y asimismo una moderada exactitud, generan pocos problemas, pero
las aplicaciones de alta velocidad y exactitud necesitan un cuidadoso diseño. Por
ejemplo tomar una muestra de 10V en menos de 1µseg con una exactitud del 0,01%
es relativamente complicado. Lógicamente, si se desea adquirir señales con una
variación lenta en el tiempo no es necesario muestrear y por ello no se requiere
emplear un circuito S&H.
352
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 222 CIRCUITOS DE MUETREO Y RETENCIÓN
La figura 222 muestra un circuito de muestreo y retención básico. Cuando el interruptor
se cierra el condensador se carga a la tensión de entrada. Cuando el interruptor se
abre el condensador retiene esta carga con lo que “congela” la tensión durante un
período especificado exteriormente. De este modo no hace falta que la conversión sea
muy rápida; basta que lo sea la adquisición de la muestra. La salida del CAD
corresponde entonces al valor de la entrada en el “instante” de muestreo. El tiempo de
conversión vendrá limitado solamente por el criterio de Nyquist.
353
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 223 PARÁMETROS CARACTERÍSTICOS
En la práctica se tienen errores tanto en la conmutación del interruptor como en los
intervalos muestreo y de retención. La figura 223 muestra los parámetros típicos de un
circuito S/H.
Durante el intervalo de muestreo el S&H se comporta como un amplificador y por lo
tanto las características estáticas y dinámicas que tiene son similares a las de
cualquier amplificador, es decir:
Error de cero (sample offset). Es el valor de la tensión de salida cuando la entrada es
cero.
Error de ganancia (gain accuracy, gain error). Es la diferencia entre la tensión de
entrada y la de salida.
354
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Máxima velocidad de variación de la salida (slew rate)
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 224. MUESTREO - RETENCIÓN
En esta fase se abre el interruptor, aunque no de forma instantánea, ni siempre con el
mismo retardo. Por lo tanto, aunque una vez transcurrido el tiempo de adquisición
decidamos retener la muestra, el valor retenido realmente será otro.
Tiempo de apertura (Aperture time). Es el tiempo necesario para que el interruptor
pase del estado de muestreo al de retención. Se mide desde el nivel
50% de la señal de control de muestreo a retención, hasta el instante en que la
salida deja de seguir a la entrada. Este tiempo se debe por una parte al retardo entre la
orden y el inicio del cambio de RON y, por otra, a la evolución gradual del interruptor
desde conducción a corte. La existencia de una constate de
355
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
tiempo τ hace que la tensión en bornes de CH esté retrasada un tiempo τ
respeto a la tensión aplicada en la entrada del S&H.
Incertidumbre en el tiempo de apertura (Aperture jitter, ∆tap). Es el margen de
variación del tiempo de apertura. Si la señal de control para pasar a retención la
adelantamos en previsión de la existencia del tiempo de apertura, el único error de
tiempo que queda es esta incertidumbre, que determina pues, el límite último de la
máxima frecuencia de muestreo. Este parámetro es consecuencia de ruido de la red
de conmutación el cual modula la fase del comando hola manifestándose en la
variación de la señal analógica de entrada
que es retenida.
Suponiendo una señal de entrada senoidal vi(t) = VP senωt, el error debido a la
incertidumbre en el tiempo de apertura es ∆V=(dvi/dt)∆tap. Si se quiere que el error
máximo sea menor que ½ LSB la frecuencia máxima de la señal de entrada será:
fmax <1/[2n+1·π · ∆tap].
356
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Error de transferencia de carga (Charge transfer). Es la carga transferida a través
de capacidades parásitas al condensador de retención cuando se
conmuta al estado de retención. Provoca un error de tensión ∆V=∆Q/CH.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 225 INTERVALO DE RETENCIÓN
Pendiente (Droop Rate). Es el decremento (o incremento, dependiendo de la polaridad
de las corrientes) de la tensión de salida, debido al condensador de almacenamiento, a
las corrientes de fuga en el interruptor y a las corrientes de polarización
amplificador
de
salida.
Esta
deriva
es
condensador de retención.
357
tanto
menor
del
cuanto mayor sea el
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 226 RAZÓN DE ATENUACIÓN DE PASO
Razón de atenuación del paso (Feedthrough Attenuation Ratio). Es el porcentaje
del cambio de una señal senoidal de entrada que se mide en la salida del S&H en
el modo de retención. Es debido al acoplamiento capacitivo a través del interruptor y
depende de la amplitud y de la frecuencia de la entrada. Tiene importancia cuando un
S&H sigue a un multiplexor analógico.
En esta fase el condensador
CH se carga a la tensión de entrada, con un
transitorio para el establecimiento
final, que depende de la amplitud y forma
concreta de la señal de entrada. Las especificaciones suelen darse para un cambio
en escalón de amplitud igual al fondo de escala.
Tiempo de adquisición (Acquisition time). Es el tiempo durante el que el S&H debe
permanecer en el estado de muestreo, necesario para que la salida alcance su
358
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
valor final, dentro de una cierta banda de error, e incluye el retardo
359
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
en la conmutación,
el intervalo de subida (slewing interval) y el tiempo de
establecimiento en la adquisición (settling time). El tiempo de adquisición aumenta
al hacerlo la capacidad del condensador de almacenamiento y, junto con el tiempo
de conversión del CAD, determina el tiempo empleado en cada
canal adquirido.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 227 RAZÓN DE ATENUACIÓN DE PASO
360
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 228 ARQUITECTURAS DE S&H
Describiendo la figura 228 tenemos:
1: Similar al descrito inicialmente,
S/H en bucle abierto y formado por dos
seguidores de tensión. Para tener una buena exactitud los amplificadores A1 y A2
deben tener slew rates altos, tiempos de establecimiento rápidos, bajas tensiones
de offset y derivadas ya que estos errores son acumulativos.
2: La realimentación completa de la salida a la entrada minimiza los errores en el
modo de muestreo. El circuito tiene mayor exactitud pero una peor dinámica.
360
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
3: Tiene unas características. El interruptor queda conectado a la masa virtual de A1
y CH es un condensador integrador. La elección del condensador está sujeta a un
compromiso entre exactitud y velocidad: si CH es grande, aumenta su exactitud
(influyen menos las corrientes de fugas y la inyección de carga), pero para que se
cargue rápidamente al valor final interesa que CH sea pequeña.
EJEMPLOS
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 229 EJEMPLO RETENEDOR DE ORDEN CERO SMP04 CON SUS
CARACTERISTICAS
361
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 230
EJEMPLO
RETENEDOR
DE ORDEN CERO
CON SUS
CARACTERISTICAS
La aplicación típica de los circuitos S/H es funcionando conjuntamente con un CAD. En
algunos casos el S/H está integrado en el CAD. El tiempo mínimo requerido en el
proceso de conversión es la suma del tiempo de apertura (tap) y el de adquisición (tad)
del S/H más el tiempo de conversión del CAD (tconv). Teniendo en cuenta el teorema de
Nyquist la máxima frecuencia de la señal de entrada viene dada por: fin < 1/2(tad + tap
+tconv)
362
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 231 APLICACIÓN DEL RETENEDOR DE ORDEN CERO
LECCIÓN 3: EL CONVERSOR ANALOGO DIGITAL (CAD)
Un convertidor analógico-digital (CAD) es un dispositivo que proporciona una salida
la cual representa digitalmente la tensión o corriente de entrada.
Básicamente la idea es comparar la entrada analógica con una señal (tensión o
corriente) de referencia.
363
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
364
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 232 CONVERSORES A/D
Si la entrada del convertidor se mueve dentro de su escala completa de valores
analógicos y se toma la diferencia entre la entrada y la salida, se obtiene una función
de error en forma de diente de sierra, denominada error de cuantificación
y es
el
error irreducible que resulta del proceso de cuantificación.
Solo se puede reducir incrementando el número de estados de salida
(resolución) del convertidor. Este error se denomina también “incertidumbre de
cuantificación” o “ruido de cuantificación”.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 233 LA FUNCIÓN DE TRANSFERENCIA IDEAL
365
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 234 ERROR DE CUANTIFICACIÓN
ESPECIFICACIONES
Error de offset. Es el valor analógico de la diferencia entre la función de
transferencia real y la ideal, en ausencia de otros errores (salvo el de cuantificación).
Su presencia implica que la primera transición no se produce exactamente
en ½
LSB, de modo que la curva de transferencia está desplazada horizontalmente.
Error de ganancia. Es la diferencia entre los puntos de mitad de escalón de la curva de
transferencia real y la ideal correspondiente a la salida digital de todo
1, en ausencia de otros errores (salvo el de cuantificación).
366
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Error de no linealidad integral (INL). Es la máxima diferencia entre la función de
transferencia real y la ideal cuando los errores de cero y de ganancia son nulos. Es
un error que no se puede corregir. Se denomina “integral” porque es el error que se
tiene en una determinada palabra de salida con independencia de las demás.
Error de no linealidad diferencial (DNL). Es la diferencia entre el ancho de un escalón
real y el de uno ideal, que es 1 LSB. Si el DNL excede 1 LSB el convertidor se
puede hacer no monótono (la salida se hace más pequeña para un incremento en la
entrada) y el convertidor puede perder códigos.
367
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 235 ERROR DE OFFSET Y DE GANANCIA
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 236 ERROR DE NO LINEALIDAD INTEGRAL(INL)
368
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 237 ERROR DE NO LINEALIDAD DIFERENCIAL (DNL)
La exactitud (accuracy) viene especificada mediante el error total, que es el valor
máximo de la suma de todos los errores, incluido el de cuantificación, y puede
expresarse como error absoluto o como error relativo.
369
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 238 ERROR TOTAL
Relación señal-ruido (SNR). Es la relación entre el valor eficaz de la señal de entrada
VIN (típicamente una señal senoidal) y el valor eficaz del ruido de cuantificación,
Vn. En decibelios se tiene SNR = 6,02xn + 1,76. Por ejemplo para un CAD de 12
bits la SNR teórica es aproximadamente 74 dB.
Cada bit extra adicional supone una mejora de aproximadamente 6 dB en la SNR.
Ahora bien, si se desea aumentar la relación SNR a base de un mayor número de bits,
hay que tener en cuenta que esto implica un mayor tiempo de conversión y, por lo tanto,
un menor ancho de banda aceptable para la señal de entrada.
370
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 239 RELACIÓN SEÑAL A RUIDO
El ruido que se tiene en un CAD es mayor que el ruido de cuantificación, por lo que la
relación señal ruido será menor que la calculada en la transparencia anterior y por tanto
la resolución efectiva, denominada número efectivo de bits (ENOB), será menor que n.
Para una determinada entrada ENOB incluye tanto el ruido de cuantificación como la
distorsión debida a la no-linealidad de su característica estática. Este parámetro
especifica el comportamiento dinámico de un CAD y disminuye con la frecuencia de la
señal de entrada.
370
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 240. NUMERO EFECTIVO DE BITS (ENOB) THD (Distorsión armónica
total)
Se define como la suma de la potencia de todos los armónicos de frecuencia superior a
la frecuencia fundamental y la potencia del fundamental. El número de armónicos que
se considera para los cálculos de THD depende de la aplicación.
SINAD (Relación señal-ruido + Distorsión)
Es la relación de la señal de entrada a la suma de la distorsión armónica y el ruido.
Es el inverso de THD+N. Las especificaciones SINAD y THD+N son una buena
indicación de la respuesta dinámica del convertidor dado que incluyen tanto el ruido
como la distorsión.
371
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Es la diferencia entre el valor máximo de la señal y el valor máximo de la
distorsión.
Este parámetro
es interesante
cuando el CAD opera en entornos
ruidosos y se desea digitalizar señales de pequeño nivel.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 241 DISTORSIÓN ARMÓNICA TOTAL (THD)
372
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
373
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FIGURA 242 MARGEN DINÁMICO LIBRE DE SEÑALES ESPURIAS
La elección de la arquitectura más adecuada para cada aplicación estará condicionada
en muchos casos por cinco parámetros: resolución, velocidad, costo, alimentación y
tamaño
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
TIPOS DE CAD
En general los CAD de mayores resoluciones son más lentos, mientras que los CAD
más rápidos consumen más. Los CAD sigma-delta son los que tienen resoluciones
más altas y el consumo más bajo, salvo los CAD de doble rampa cuyo consumo es aún
menor.
374
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÓN 4: EL CONVERSOR DIGITAL ANALOGO (CDA)
La conversión digital-analógica es un procedimiento a través del cual un código de
entrada es transformado en una señal de tensión o de corriente unipolar o bipolar de
salida mediante una correspondencia
entre 2n combinaciones binarias posibles
de entrada y 2n tensiones (o corrientes) discretas de salida,
obtenidas a partir de una referencia de tensión o de corriente.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 243 EL COVERSOR DIGITAL A ANALOGO
375
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 244 LA FUNCIÓN DE TRANSFERENCIA IDEAL
La figura 244 muestra la característica de transferencia ideal de un CDA unipolar.
Es importante notar que tanto la entrada como la salida están cuantificadas, es decir,
un CDA de n bits (con una referencia fija) solo puede
tener 2n posibles salidas analógicas.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
376
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
TAMAÑO DE 1 LSB
377
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La tabla
muestra el valor de un LSB para diferentes resoluciones y márgenes de
tensión analógica. Vemos que se tienen valores de LSB inferiores a 1 mV.
Esto
conlleva
un
cuidado
especial
en
el
diseño
de
la
etapa
de
acondicionamiento previa, de forma que los diferentes errores (offset, derivas, ruido,…)
no superen el valor del LSB. Tenga en cuenta por ejemplo que el ruido Johnson
de una resistencia de 2,2 kΩ a 25ºC, para un ancho de banda de
10 kHz es de 600 nV.
Los convertidores más simples son los unipolares, cuya salida analógica es de una
sola polaridad. Sin embargo, los más empleados son los convertidores bipolares, los
cuales permiten realizar una representación digital de cantidades
que
puedan
tomar
valores
positivos
o
negativos.
Hay
dos
tipos
de
convertidores bipolares:
Bipolar con offset. Sólo cambia el bit de mayor peso (MSB), que ahora es 1 para
las cantidades positivas y 0 para las negativas. Es un código muy fácil de realizar y por
ello es uno de los favoritos en CDA que acepten entradas bipolares, a pesar de
que alrededor del valor cero tiene muchas transiciones de
bits.
Bipolar
con signo. Las cantidades
positivas
van precedidas
de un 0 y las
negativas de un 1. La cantidad “cero” puede representarse indistintamente con un 1 o
con un 0 a la izquierda. Las transiciones de bits alrededor de cero son pocas, de modo
que es un código interesante para representar cantidades próximas a cero. Sin
embargo se utiliza poco porque dificulta las operaciones aritméticas. Se utiliza en los
378
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CDA de los voltímetros digitales.
379
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 245 CONVERTIDORES UNIPOLARES Y BIPOLARES
Las especificaciones DC o de continua tienen interés en aplicaciones de medida y
control, operando con señales lentas y donde la temporización exacta de
la
conversión no es generalmente importante. Las principales especificaciones en
continua son los errores de offset, ganancia y de no linealidad.
Error de offset. Es la diferencia entre la curva de transferencia real y la ideal, en
ausencia de otros errores (salvo el de cuantificación) cuando la entrada digital es
cero. Afecta por igual a todos los códigos de entrada. Se puede corregir mediante
calibración.
380
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Error de ganancia. Es la diferencia entre los puntos de la curva real y la ideal para la
entrada digital de fondo de escala, cuando el error de offset se ha
anulado. Se puede corregir mediante calibración.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 246. ESPECIFICACIONES DC
No linealidad integral (INL). Desviación máxima respecto a la línea que une los
extremos (cero y fondo de escala) de la curva característica del CDA, cuando los
errores de cero y de ganancia son nulos. Se expresa como porcentaje del fondo
de escala, o como fracción de LSB. Es un error que no se puede corregir.
No linealidad diferencial (DNL). Idealmente la diferencia en la salida correspondiente
a
dos
códigos
adyacentes
es
1
LSB.
La
no
linealidad diferencial es una
medida de la desviación con respecto a dicha situación ideal. Puede expresarse como
una fracción de LSB o en forma porcentual respecto a FS. Si es mayor de 1 LSB la
función de transferencia puede llegar a ser no monotónica es decir puede llegar a
ocurrir que la pendiente cambie de signo. Hoy en día una parte importante de
los CDA comerciales garantizan la
381
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
monotoneidad
de la característica
de transferencia
en un amplio margen de
temperaturas de trabajo.
Las especificaciones AC son importantes cuando los convertidores son usados en
sistemas de muestreo y reconstrucción de señales. Las especificaciones AC más
importantes son:
Tiempo
de establecimiento
(Settling
time, ts). Es el tiempo desde que se
produce un cambio en el código de entrada hasta que la señal de salida del CDA
se mantiene dentro de ± ½ LSB (u otra tolerancia especificada) del valor final. Este
tiempo está compuesto por un primer proceso de duración td durante el cual la
conmutación en tiempos desiguales de los interruptores del circuito produce un efecto
indeseable en la salida denominado “glitch”, un cambio de tensión con pendiente
determinada por la rapidez de cambio del circuito (slew rate) y un proceso oscilatorio
amortiguado alrededor del valor final de la tensión o corriente de salida.
Slew rate. Es el cociente entre la tensión o corriente de plena escala y el tiempo
de establecimiento requerido para alcanzar el valor de plena escala partiendo del
valor de cero. Se expresa en V/s.
Frecuencia de conversión (Conversión rate). Es la frecuencia máxima a la que
se puede cambiar el código de entrada obteniendo la salida correspondiente.
Generalmente suele ser menor que el inverso del tiempo de establecimiento y se
expresa en Hz o en muestras por segundo (S/s).
382
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 247 ESPECIFICACIONES AC
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 248. CONVERTIDOR R – 2R
Uno de los circuitos más empleados en los DACs es la red de resistencias en
escalera R-2R de la figura 248. La corriente de salida, IOUT es la suma de las
380
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
que fluyen a través de cada resistencia de valor 2R controlada por los distintos bits.
Cuando el extremo inferior de cada rama está a 0 voltios, al ir de izquierda a derecha la
corriente se va dividiendo por 2 a cada nodo. Con esta disposición de interruptores
dobles la carga que ve la fuente de tensión de referencia es R, con independencia de
la
palabra
de
entrada.
Algunos
modelos
tienen disponible en un terminal la
corriente de salida complementaria, es decir, la correspondiente a la palabra digital
complementaria de la aplicada a la entrada. Si una de estas dos corrientes no se
utiliza, hay que derivarla a masa.
La precisión obtenida en la fabricación de condensadores MOS con una relación
de valores determinada, permite fabricar actualmente CDA basados en redes de
condensadores en vez de resistencias.
En los modelos con salida en corriente y resolución elevada, si se desea obtener
una salida en tensión mediante un AO externo, hay que tener cuidado en la elección
de AO, de forma que los errores de este sean lo menor posible.
Criterios de Selección:
•
Resolución: 8, 10, 12, 14, 16, 18 bits
•
Tipo de salida: V, I
•
Tiempo de establecimiento: µs
•
Tensión de referencia: Externa/Interna
•
Interfaz bus de datos: Serie (I2C, SPI), Paralelo
•
Número de canales: 1, 2, 3, 4, 8
EJEMPLOS DE CDA:
381
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El MAX 5520
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 249. MAX 5520
382
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 250. SALIDA UNIPOLAR
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 251 SALIDA BIPOLAR
383
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 252 ALIMENTACIÓN
APLICACIONES
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 253. APLICACIONES
LECCIÓN 5: SISTEMAS DE ADQUISICIÓN DE DATOS
Un Sistema de Adquisición de Datos no es mas que un equipo electrónico cuya función
es el control o simplemente el registro de una o varias variables de un proceso
cualquiera.
El objetivo básico de los "Sistemas de Adquisición de Datos"(S.A.D) es la integración
384
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
de los diferentes recursos que lo componen: Transductores de
385
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
diferentes tipos y naturaleza, multiplexores,
conversores
A/D y D/A,
amplificadores,
microcontroladores
para
sample and hold,
chequear
variables
(PH,
humedad relativa, temperatura, iluminación, concentración, etc.) para una posterior
utilización de la misma ya sea con fines de control o medición.
A continuación se muestra la grafica de un SAD
FUENTE:
http://www.monografias.com/trabajos17/sistemas-adquisicion-
dato/sistemas-adquisicion-dato.shtml
FIGURA 254 DIAGRAMA GENERAL DE UN SAD
SISTEMA DE ADQUISICIÓN DE DATOS (SIN S/H)
La figura 255 muestra un
diagrama de bloques de un sistema de adquisición de
datos
AGP
multiplexado
con
y CAD.
385
Supongamos
que
se
da tanto
la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
conmutación de canal en el multiplexor como la ganancia del AGP se
386
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
establecen simultáneamente. Posteriormente se le da al CAD la orden de conversión.
La máxima frecuencia de muestreo está limitada por el tiempo de conmutación
del
multiplexor (tmux), el tiempo de establecimiento del AGP (tagp) y el tiempo de
conversión de CAD (tconv), como se muestra en la figura
255. Para evitar errores de codificación la señal de entrada debe mantenerse constante
durante el tiempo de conversión. Suponiendo una señal de entrada sinusoidal podemos
calcular, igual que hicimos en la transparencia 17, la frecuencia máxima de la señal de
entrada. Por ejemplo suponiendo un CAD de
12 bits con tcov= 20 µs, la máxima frecuencia está limitada a 4 Hz. Esto puede
ser adecuado si la señal es continua, pero no para señales dinámicas.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 255 SISTEMA DE ADQUISICIÓN DE DATOS (SIN S/H)
SISTEMA DE ADQUISICIÓN DE DATOS (CON S/H)
387
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Añadiendo
la
función
S/H
al
circuito
anterior
permite
procesar
señales
dinámicas sin incrementar la complejidad del sistema ya que el S/H puede estar
integrado en el CAD.
En el esquema de la figura la temporización
se realiza de forma que el
multiplexor y el AGP se activan una vez realizada la adquisición por parte del S/H.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 256 SISTEMA DE ADQUISICIÓN DE DATOS (CON S/H)
APLICACIÓN
388
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 257 muestra el empleo de un S&H para minimizar el efecto de los picos
de tensión (gliches) que se producen en las transiciones del código de entrada de un
CDA. El valor de estos picos depende de dicho código de entrada. Para
minimizar estos picos, justamente antes de retener un nuevo dato en el CDA el S&H
es puesto en el estado de retención de forma que los gliches son aislados de la salida.
Las transiciones de conmutación producidas en la salida del S&H no dependen del
código y son fácilmente filtrables. Esta técnica se puede emplear a bajas frecuencias
para mejorar las características
de distorsión de los CADs.
FUENTE: HTTP://WWW2.ATE.UNIOVI.ES/13996/
FIGURA 257. APLICACIÓN DE UN SISTEMA DE ADQUISICIÓN DE DATOS
TARJETAS DE ADQUISICION DE DATOS DAQ
389
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Las tarjetas DAQ son tarjetas insertables que permiten la entrada y salida de datos
del computador a otros aparatos, donde se conectan sensores, y actuadores, para
interactuar con el mundo real. Los datos que entran y salen pueden
digitales
o
análogas,
o simplemente
conteos
ser
señales
de ocurrencias digitales, tanto de
entrada, como de salida. Figura 258
Las tarjetas se comportan como si fueran un puerto más en el computador, y poseen
todo un protocolo y sistema de manejo, por lo que entender cada tarjeta, como su
funcionamiento, al igual que cualquier instrumento, requiere de tiempo y cuidado.
Existen tarjetas de alto desempeño, y de bajo. Las de alto son programables, y facilitan
altas ratas de manejo de información, pues son en cierta forma inteligentes
y
suficientes, tal como un sistema Stand Alone, y por tanto no comprometen mucho
la velocidad y rendimiento del computador.
FUENTE: WWW.NI.COM/LABVIEW
FIGURA 258 LAS TARJETAS DE ADQUSICIÓN DE DATOS DAQ
390
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Las
tarjetas
de
bajo
desempeño
requieren
de
un
control
directo
del
computador, y se ven limitadas por la velocidad de éste. El windows en cierta forma es
un sistema operativo que no trabaja en tiempo real, para operaciones donde la rata de
muestreo es muy alta, como en aplicaciones de audio, radar, vibraciones
y video,
aunque para aplicaciones de lentitud considerable es bueno, como en controles de
hornos. En aplicaciones lentas Windows y tarjetas simples bastan porque los tiempos
perdidos por el sistema de interrupciones de Windows (sea por mover el mouse o
cualquier otra cosa) no afectan comparativamente.
Para aplicaciones
de alta velocidad
y tiempo
real, se requiere
de hardware
especial, o sea tarjetas inteligentes, que se programen, y transfieran los datos a
memoria, ya sea por rutinas de DMA (acceso directo a memoria), o por rutinas de
interrupciones al procesador.
Las tarjetas como cualquier otro periférico,
requiere de sus parámetros
de
programación, y hasta protocolos de comunicación, por lo que se requiere de un
software Driver que maneje lo bajo de programación, y deje en la superficie, la
posibilidad de programar aplicaciones con los beneficios de dichas tarjetas, de una
forma sencilla.
COMUNICACIÓN A TRAVÉS DEL PUERTO SERIAL.
Se trasmite la información por un puerto que puede ser el COM1 o el COM2, de forma
serial, ósea a través de un solo cable, y cada bit pasa uno tras otro a alta velocidad.
Para la comunicación entre computadores se establece un protocolo
390
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
común para que la información sea entendida por ambos. Se debe definir el tamaño de
los BUFFER para almacenar datos mientras se realiza la comunicación. También se
debe definir si hay Handshaking, el cual consiste en que el que recibe cuando valla a
tener lleno el búfer de información mande una instrucción (Si es por software es un
comando <ctrl-S>, si es por hardware por una línea) para detener la transmisión, y otra
para reanudar la transmisión de información.
COMUNICACIÓN A TRAVÉS DE UN PUERTO DE GPIB.
EL GPIB (General Purpose Interface Bus ANSI/IEEE 488.1 y 488.2), es un puerto
diseñado por la Hewlett Packard, para establecer comunicación con instrumentos
de medición.
Muchos
de los instrumentos
como son Balanzas, Osciloscopios,
multímetros y equipos de tipo “Stand Alone” (que no requieren de un computador
para funcionar, son independientes) cuentan con este tipo de puerto.
COMUNICACIONES DINÁMICAS ENTRE PROGRAMAS DE WINDOWS DDE.
Si se tiene una base de datos abierta, es posible accesar datos de esta, y usarlos
y viceversa, lo que sirve para una actualización dinámica.
391
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CAPITULO 12: SISTEMAS DE INSTRUMENTACIÓN DE VISUALIZACIÓN DINÁMICA
LECCIÒN 1: EL TUBO DE RAYOS CATODICOS (TRC)
TUBO DE RAYOS CATODICOS
Su función es generar el haz de electrones, posteriormente se acelera este haz y se
desvía para crear la imagen; contiene además una pantalla de fósforo donde el haz
de electrones llega a ser visible.
El tubo de rayos catódicos cuenta con un cátodo que calentado emite electrones,
posteriormente
estos pasan por el ánodo de aceleramiento
por medio de un
pequeño hueco en la rejilla de control. La rejilla de control permite limitar
de
corriente
de
cátodo.
Se
encuentra
la
cantidad
ubicado posteriormente un ánodo de
enfoque, el cual antecede al ánodo acelerador, el ánodo acelerador suministra energía
al haz de electrones para pasar hacia la pantalla fosforescente.
- DEFLEXION ELECTROSTATICA
La deflexión (D) sobre la pantalla fluorescente esta dada por:
D=
2dEa
LIdEd
392
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Donde:
D: deflexión sobre la pantalla fluorescente (metros).
L: distancia a partir del centro de las placas de deflexión hasta la pantalla
(metros).
Id: longitud efectiva de las placas de deflexión. D: distancias entre las placas.
Esta expresión muestra que si se tiene un voltaje dc (Ed), la desviación del haz de
electrones sobre la pantalla es proporcional al voltaje de deflexión (Ea), la variación
sobre la pantalla seguirá las variaciones del voltaje de deflexión de una manera
lineal.
Se define la sensibilidad de deflexión (S), en un tubo de rayos catódicos como la
desviación sobre la pantalla (en metros), por voltaje de deflexión.
S=
D
m
Ed
=
LId
2dEa
V
El factor de deflexión (G) es:
G=
S
1
=
LId
2dEa
=
V
m
Este valor no depende del voltaje de deflexión; los rangos de los valores de factores de
deflexión son 10 V /cm – 100 V/cm son sensibilidades de 1.0 mm/V y 0.1 mm/V .
393
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
- ACELERACION DE POSTDEFLEXIÓN
Dependiendo de la cantidad de energía que se transfiera al haz de electrones se
tendrá una cantidad de luminosidad proporcionada por la pantalla de fósforo
Lo ideal es tener un equipo rápido, para esto se debería acelerar el haz de electrones a
la máxima velocidad, pero si se cuenta con un haz de electrones demasiado veloz se
hace más difícil reflectar el haz.
Para esto usualmente los osciloscopios inicialmente aceleran el haz a una velocidad
relativamente baja, el haz se reflecta y posteriormente se reflecta hasta la velocidad
final deseada. A estos tubos se les conoce como tubos de aceleración postdeflexión
- PANTALLAS PARA LOS TUBOS DE RAYOS CATODICOS
La superficie interior en la pantalla cuenta con fósforo, este recibe la energía cinética de
los electrones y emite energía en el espectro visible a frecuencia baja. Esta
característica se denomina fluorescencia, estos materiales además tienen la capacidad
de continuar emitiendo luz posteriormente a que la fuente de excitación se suspende,
esta propiedad se conoce como fosforescencia.
La luminancia indica la intensidad de la luz emitida por la pantalla del CRT, esta
determinada por el número de electrones que chocan contra la pantalla en un segundo,
también depende de la energía con la que los electrones golpean la pantalla, estando
sujeto al potencial de aceleración; la luminancia varia dependiendo del tiempo con
que el haz golpea un área determinada del
394
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
fósforo. Según las características físicas del fósforo se tendrá una variación en la
luminancia.
Es importante mantener baja la intensidad del haz de electrones de tal forma que se
proteja el instrumento de un daño permanente en el fósforo por quemadura.
FUENTE:
PERSONALES.UNICAN.ES/PEREZVR/PDF/TUBOS%20DE%20RAYOS%20C
ATODICOS.PDF
FIGURA 259 CAÑON DE UN TRC
El cañón electrónico
contiene
el cátodo emisor,
reja de control
y electrodos
aceleradores y de enfoque del haz electrónico, designados generalmente como sistema
de lentes electrónicas.
Con la excepción de los cañones electrónicos en los tubos de cámara, casi todos
los cañones se basan en el principio de dos lentes consistentes en una fuente
electrones
termoiónicos,
una
primera
lente,
395
generalmente
de
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
electrostática y una segunda lente que puede ser electrostática, magnética o una
combinación de ambas
En la primera lente se encuentra el cátodo, la reja de control y el primer ánodo. El
cátodo es de caldeo indirecto y tiene la forma mostrada en la figura 260. En el interior
de un manguito cilíndrico de níquel se encuentra el filamento calefactor y el
cátodo, es decir la superficie emisora propiamente dicha, en un disco sobre la cara
plana del cilindro en dirección a la pantalla.
FUENTE:
PERSONALES.UNICAN.ES/PEREZVR/PDF/TUBOS%20DE%20RAYOS%20C
ATODICOS.PDF
FIGURA 260
ESTRUCTURA DEL CÁTODO EN UN TUBO DE RAYOS
CATÓDICOS
La reja de control no es de la forma habitual que se encuentra en los triodos u otras
válvulas de vacío. En este caso es un cilindro metálico, con un pequeño orificio a través
del que pueden pasar los electrones. Esta configuración ayuda a reducir el área
efectiva del cátodo a la vez que permite la configuración del haz electrónico en esa
zona, como consecuencia del campo eléctrico entre la reja y el cátodo. A continuación
de la reja y separada de ésta por un pequeño espacio, se localiza el primer ánodo
en el que mediante paredes cuidadosamente ajustadas se controla y configura el
haz electrónico hacia la pantalla. La estructura de la primera lente así configurada se
muestra esquemáticamente.
396
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE:PERSONALES.UNICAN.ES/PEREZVR/PDF/TUBOS%20DE%20RA
YOS%20CATODICOS.PDF
FIGURA 261 ESTRUCTURA ESQUEMÁTICA DE LA PRIMERA LENTE
En ausencia de campos eléctricos, los electrones abandonan el cátodo con baja
velocidad y forman una nube electrónica o carga de espacio en la zona entre el
cátodo y la reja.
Esta carga de espacio actúa como repulsor para los nuevos electrones emitidos
por el cátodo y se alcanza una condición de equilibrio. Si se aplica un voltaje positivo,
relativamente elevado, al primer ánodo, se establece un campo eléctrico en el espacio a
su alrededor que arrastra a los electrones a través del orificio en el cilindro de la reja de
control, conformándose un haz electrónico de sección circular y en la forma aproximada
que se indica en la figura 261. La curvatura longitudinal de los bordes del haz está
determinada por la distancia entre el primer ánodo y la reja de control, así como por el
voltaje de este último. Los electrones del haz convergen en un punto en el interior del
cilindro de la primera lente y luego nuevamente se separan. Este punto, situado en el
eje del cañón electrónico y del tubo de rayos catódicos se designa como punto de
397
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
cruce y puede considerarse que actúa como un cátodo virtual de muy pequeñas
dimensiones. La cantidad de electrones que pasan hacia el primer ánodo
depende
del voltaje aplicado a la reja de control que, si es suficientemente negativo,
impedirá el paso de cualquier electrón hacia la pantalla. La perforación o ventana
en el primer ánodo sirve para conformar el haz electrónico, junto con la segunda
lente, en la región entre estas y la pantalla, a fin de que nuevamente converja en
un punto sobre la pantalla.
La posición del punto de cruce puede variar como consecuencia de los voltajes del
primer ánodo y de la reja de control, así como de la densidad del haz electrónico
en la zona del primer ánodo y tiene efectos sobre el enfoque del haz
en la
pantalla. Una forma de ajustar el enfoque de la imagen es, por consecuencia,
variar el voltaje del primer ánodo.
LECCIÒN 2: SISTEMAS DE DEFLEXION HORIZONTAL Y VERTICAL
SISTEMA DE DEFLEXIÓN VERTICAL
Este sistema en su salida debe tener una señal amplificada del nivel apropiado, con la
mínima distorsión posible
En la figura 262, se ilustran los componentes de un sistema completo de
deflexión vertical.
398
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE:PERSONALES.UNICAN.ES/PEREZVR/PDF/TUBOS%20DE%20RA
YOS%20CATODICOS.PDF
FIGURA 262 COMPONENTES DE UN SISTEMA DE DEFLEXIÓN VERTICAL
El atenuador de entrada establece la sensibilidad del osciloscopio, proporcionando
diferentes valores al preamplificador vertical. Existen diversas configuraciones de
atenuadores. Una de las configuraciones empleada consta de un divisor resistivo
conectado a un amplificador con una capacitancia de entrada de 10 pF, como se
ilustra en la figura 263
399
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE:PERSONALES.UNICAN.ES/PEREZVR/PDF/TUBOS%20DE%20RA
YOS%20CATODICOS.PDF
FIGURA 263 COMPONENTES DE UN SISTEMA DE DEFLEXIÓN VERTICAL
Esta configuración tiene una caída a frecuencias altas causada por la
capacitancia en paralelo del amplificador vertical.
Para mejorar la respuesta en alta frecuencia se emplean atenuadores con
divisores de voltaje resistivos y capacitivos como se muestra en la figura 264.
FUENTE:PERSONALES.UNICAN.ES/PEREZVR/PDF/TUBOS%20DE%20RA
YOS%20CATODICOS.PDF
FIGURA 264. ATENUADOR CON DIVISOR RESISTIVO Y CAPACITIVO
400
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Esta configuración tiene el nombre de atenuador compensado. En instrumentos de
frecuencia mayores a 100 Mhz, se emplean divisores de entrada aun más complejos;
en estos la atenuación se divide entre la entrada y la salida del preamplificador de
deflexión vertical. Gran número de osciloscopios tienen un capacitor conmutable de
acoplamiento. Este condensador de acoplamiento se elimina en la medición DC.
El amplificador vertical del osciloscopio tiene una configuración push – pull, donde
además de proporcionar ganancia de voltaje debe tener una ganancia de corriente,
este
amplificador
trabaja
con
amplificadores
clase
A
de
alta corriente de
realimentación.
SISTEMA DE DEFLEXIÓN HORIZONTAL
Este sistema esta conformado por un generador de base de tiempo, que controla
la velocidad con la que se barre el haz en la superficie del tubo de rayos catódicos
(CRT) y se ajusta desde el panel frontal. Cuenta además con un circuito de disparo,
este asegura que el barrido horizontal se inicie en el mismo punto que la señal de
entrada vertical. Se tiene además un amplificador horizontal,
su
función
es
la
amplificación de la amplitud de señales provenientes del generador de barrido.
El generado de barrido proporciona voltajes de rampa lineales que son alimentados al
amplificador horizontal. Para lograr tener barridos variables en periodo de tiempo se
emplean capacitares conmutados y corrientes variables.
401
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
El barrido a realizar se inicia únicamente después de recibir un pulso de disparo
que viene del circuito de disparo.
Cuando se completa el barrido, el capacitor se descarga mediante un transistor
retornando su voltaje a cero.
La figura 265
muestra la relación existente entre los pulsos de disparo y la
generación del barrido.
El barrido no se disparará, hasta que el barrido más el tiempo de espera sean menor
que el periodo de la entrada. Algunos osciloscopios cuentan con dos bases de
tiempo, generalmente se sincronizan de manera tal que una base de tiempo retarde el
disparo de la segunda base. La base de tiempo retardada se dispara con la señal de
entrada, el barrido se inicia inmediatamente
después del tiempo de retardo.
También es utilizado el sistema de barrido alternado, donde un generador de base
de tiempo
o principal
sincroniza
la deflexión, entonces
movimiento vertical y se presenta la porción retardada.
402
el
trazo
tiene
un
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE:PERSONALES.UNICAN.ES/PEREZVR/PDF/TUBOS%20DE%20RA
YOS%20CATODICOS.PDF
FIGURA 265. RELACIÓN ENTRE LOS PULSOS DE DISPARO Y LA GENERACIÓN
DE BARRIDO
Se emplea también la conmutación de la velocidad de barrido después del tiempo
de retardo. La porción inicial de la onda es visible a una velocidad de barrido
al
tiempo
retardado
la
velocidad
de
barrido
lenta,
y
cambia rápidamente. Se emplea
este método cuando es difícil o imposible obtener un punto de disparo estable, solo
se requiere un barrido para presentar las porciones lenta y retardada del trazo.
403
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
CION 3: INSTRUMENTACIÓN PARA LAS MEDICIONES EN EL DOMINIO DEL TIEMPO
EL OSCILOSCOPIO
El osciloscopio es un instrumento que traza una grafica de una señal eléctrica, en la
mayoría de las aplicaciones, esta gráfica muestra como cambia una señal con el
tiempo, el eje vertical (Y) representa el voltaje, y el eje horizontal (X), representa el
tiempo.
Esta representación gráfica nos informará las siguientes características de la señal.
-
-
Valores de tiempo y voltaje de una señal.
-
La frecuencia de la señal.
La frecuencia con la que esta ocurriendo una porción particular de la señal con
respecto a otras secciones de la señal
-
El distorcionamiento de la señal debido al mal funcionamiento de un componente.
-
Que parte de una señal es de corriente continua (CC) y que parte
corriente alterna (CA).
-
Que parte es ruido, y si el ruido cambia con el tiempo.
Un osciloscopio mide ondas de voltaje. Un ciclo de una onda es la porción de esta
que se repite. Los contornos de una forma de onda nos dan información acerca de la
señal. Si se observa un cambio en la parte superior de una forma de onda, es
porque el voltaje permaneció constante. Si se observan líneas rectas y diagonales
indican un cambio lineal (es decir
404
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
aumento o disminución de voltaje a una velocidad estable). Si se observan ángulos
agudos son debidos a cambios repentinos en el voltaje de la señal.
TIPOS DE ONDAS
-
ONDAS SINUSOIDALES
Es la forma de onda fundamental. El voltaje de la red eléctrica varía como una onda
sinusoidal. Las señales de test producidas por los circuitos osciladores
de
un
generador de señal son frecuentemente ondas sinusoidales.
La onda sinusoidal amortiguada es un caso especial de una señal que oscila,
pero que disminuye con el tiempo.
En la figura 266 se muestra las ondas sinusoidales y sinusoidales amortiguadas.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 266.
ONDA SINUSOIDAL Y SINUSOIDAL AMORTIGUADA
405
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
ONDAS CUADRADAS Y RECTANGULARES
En las ondas cuadradas el voltaje aumenta y disminuye a intervalos iguales. Es
empleada esta forma de onda en circuitos digitales como señal de sincronismo de reloj.
También se utiliza para verificar amplificadores. Si el funcionamiento del amplificador es
optimo, este aumentará la amplitud de la onda cuadrada con una mínima distorsión.
La onda rectangular es similar a la onda cuadrada, con la diferencia de que los
tiempos de subida y bajada no son de igual longitud, tal como se observa en la
figura 267.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 267
ONDA CUADRADA Y ONDA RECTANGULAR
406
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
ONDAS DIENTE DE SIERRA Y TRIANGULARES
Son empleadas en circuitos que controlan voltajes linealmente, como el barrido
horizontal de un osciloscopio analógico o la exploración de la trama de un televisor.
Las transiciones entre niveles de voltaje de estas ondas cambian a una velocidad
constante. Estas tensiones se llaman rampas. Sus
características se observan en la figura 268.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 268
ONDA DIENTE DE SIERRA Y TRIANGULAR
ONDAS ESCALÓN Y PULSOS
Estas señales ocurren de forma no periódica, se denominan señales transitorias. La
onda escalón indica un cambio repentino en el voltaje, similar a cuando se
enciende un interruptor. La señal de pulso también indica un cambio repentino en
el voltaje con un aumento y disminución rápida, similar al cambio de voltaje que
se tendría
si se encendiera
y apagara un interruptor. Un pulso también es la
407
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
representación de un bit de
408
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
información. Una agrupación de pulsos se conoce como tren de pulsos. En
un ordenador sus componentes se comunican a través de pulsos.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 269
ONDAS ESCALÓN Y PULSOS
-
SEÑALES PERIÓDICAS Y NO PERIÓDICAS
Si una señal es repetitiva a través del tiempo es periódica, si por el contrario la señal
cambia constantemente es no periódica.
-
SEÑALES SINCRONÍAS Y ASÍNCRONAS
Si existe entre las dos señales una relación de tiempo las señales serán sincronías.
Dentro de un ordenador las señales de reloj datos y dirección son sincronías. Si por
el contrario entre las señales no existe una relación de tiempo la señal es asíncrona.
409
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
MEDIDAS DE FORMA DE ONDA
-
FRECUENCIA Y PERIODO
Si la señal se repite, tiene una frecuencia, esta equivale al número de veces que la
señal se repite en un segundo, ciclos por segundo, se mide en hertz (Hz). El periodo
corresponde a la medida en tiempo que tarda la señal en completar
un ciclo. La
relación entre frecuencia y periodo es inversa. La señal de la figura 270 tiene una
frecuencia de 3 Hz y un periodo de 1/3 segundos.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 270
FRECUENCIA Y PERIODO DE UNA SEÑAL
410
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
-
VOLTAJE
El voltaje es una variación en el potencial eléctrico entre dos puntos en un circuito.
Normalmente se realiza la medición desde el pico máximo de
la señal al pico
mínimo (voltaje pico a pico).
-
AMPLITUD
Es definido
como la cantidad
de voltaje entre dos puntos de un circuito.
Normalmente expresa el voltaje máximo de una señal medido desde tierra,
o cero voltios.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 271.
AMPLITUD DE UNA SEÑAL PERIÓDICA
410
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
-
FASE
El desplazamiento de fase de dos señales describe la diferencia en tiempo entre dos
señales similares. En la figura 271 la forma de onda que simboliza la corriente se dice
que esta 90 grados desfasada con la forma de onda denominada voltaje.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 272.
FASE ENTRE DOS SEÑALES PERIÓDICAS
TÉCNICAS DE MEDIDA EN OSCILOSCOPIOS
Las dos medidas básicas que se pueden realizar con un osciloscopio son el voltaje
y el tiempo, al ser medidas directas.
Algunos osciloscopios digitales poseen un software interno que permite realizar las
medidas de forma automática. Sin embargo, si se aprende a realizar
411
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
medidas de forma manual,
estará capacitado para chequear las medidas automáticas
que realiza un osciloscopio digital.
LA PANTALLA
La figura 273 representa la pantalla de un osciloscopio. Se debe notar que existen
unas marcas en la pantalla que la dividen tanto en vertical como en horizontal, forman lo
que se denomina retícula ó rejilla. La separación entre dos líneas consecutivas de la
rejilla constituye lo que se denomina una división.
Normalmente la rejilla posee 10 divisiones horizontales por 8 verticales del mismo
tamaño (cercano al cm), lo que forma una pantalla más ancha que alta. En las líneas
centrales, tanto en horizontal como en vertical, cada división ó cuadro posee unas
marcas que la dividen en 5 partes iguales (utilizadas como
veremos más tarde para afinar las medidas)
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 273.
PANTALLA DE OSCILOSCOPIO
412
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Algunos osciloscopios poseen marcas horizontales de 0%, 10%, 90% y 100% para
facilitar la medida de tiempos de subida y bajada en los flancos (se mide entre el 10% y
el 90% de la amplitud de pico a pico). Algunos osciloscopios también visualizan en su
pantalla
cuantos
voltios
representa
cada
división vertical y cuantos segundos
representa cada división horizontal.
MEDIDA DE VOLTAJES
Generalmente cuando se habla de voltaje realmente expresa la diferencia de potencial
eléctrico, expresado en voltios, entre dos puntos de un circuito. Pero normalmente uno
de los puntos esta conectado a masa (0 voltios) y entonces se simplifica hablando
del voltaje en el punto A ( cuando en realidad es la diferencia de potencial entre el
punto A y GND). Los voltajes pueden también medirse de pico a pico (entre el valor
máximo y mínimo de la señal). Es muy importante que especifiquemos al realizar
una medida que tipo de voltaje estamos midiendo.
El osciloscopio es un dispositivo para medir el voltaje de forma directa. Otras medidas
se pueden realizar a partir de esta por simple cálculo (por ejemplo, la de la intensidad
ó la potencia). Los cálculos para señales CA pueden ser complicados, pero siempre el
primer paso para medir otras magnitudes es
empezar por el voltaje.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 274.
VOLTAJE PICO DE UNA SEÑAL
413
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
En la figura 274 se ha señalado el valor de pico Vp, el valor de pico a pico Vpp,
normalmente el doble de Vp y el valor eficaz Vef ó VRMS (root-mean-square, es decir
la raíz de la media de los valores instantáneos elevados al cuadrado) utilizada para
calcular la potencia de la señal CA.
Realizar la medida de voltajes con un osciloscopio es fácil, simplemente se trata
de contar el número de divisiones verticales que ocupa la señal en la pantalla.
Ajustando la señal con el mando de posicionamiento horizontal podemos utilizar
las subdivisiones de la rejilla para realizar una medida más precisa. (Recordar que
una subdivisión equivale generalmente a 1/5 de lo que represente una división
completa). Es importante que la señal ocupe el máximo espacio de la pantalla para
realizar medidas fiables, para ello actuaremos sobre
el conmutador del amplificador vertical.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM
FIGURA
275.
MEDICIÓN
DE
VOLTAJE
POR
MEDIO
DEL
OSCILOSCOPIO
Algunos osciloscopios poseen en la pantalla un cursor que permite tomar las medidas
de tensión sin contar el número de divisiones que ocupa la señal. Basicamente el
cursor son dos lineas horizontales para la medida de voltajes y dos lineas verticales
para la medida de tiempos que podemos desplazar
414
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
individualmente por la pantalla. La medida se visualiza de forma automática en la
pantalla del osciloscopio.
MEDIDA DE TIEMPO Y FRECUENCIA
Para realizar medidas de tiempo se utiliza la escala horizontal del osciloscopio. Esto
incluye la medida de periodos, anchura de impulsos y tiempo de subida y bajada de
impulsos. La frecuencia es una medida indirecta y se realiza calculando la
inversa del periodo. Al igual que ocurria con los voltajes, la medida de tiempos
será más precisa si el tiempo objeto de medida ocupa la mayor parte de la
pantalla, para ello actuaremos
sobre el conmutador de la base de tiempos. Si
centramos la señal utilizando el mando de posicionamiento vertical podemos utilizar
las subdivisiones para realizar una medida más
precisa.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 276.
MEDICIÓN DEL TIEMPO Y LA FRECUENCIA
MEDIDA DE TIEMPOS DE SUBIDA Y BAJADA EN LOS FLANCOS
En muchas aplicaciones es importante conocer los detalles de un pulso, en
415
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
particular los tiempos de subida ó bajada de estos.
416
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Las medidas estándar en un pulso son su anchura y los tiempos de subida y bajada. El
tiempo de subida de un pulso es la transición del nivel bajo al nivel alto de voltaje.
Por convenio, se mide el tiempo entre el momento que el pulso alcanza el 10% de la
tensión total hasta que llega al 90%. Esto elimina las irregularidades en las bordes del
impulso. Esto explica las marcas que se observan en algunos osciloscopios (algunas
veces simplemente unas líneas punteadas).
La medida en los pulsos requiere un fino ajuste en los mandos de disparo. Para
convertirse en un experto en la captura de pulsos es importante conocer el uso de los
mandos de disparo que posea nuestro osciloscopio. Una vez capturado el pulso, el
proceso de medida es el siguiente: se ajusta actuando sobre el conmutador del
amplificador vertical y el y el mando variable asociado hasta que la amplitud pico a
pico del pulso coincida con las líneas punteadas (ó las señaladas como 0% y 100%).
Se mide el intervalo de tiempo que existe entre que el impulso corta a la línea
señalada como 10% y el 90%, ajustando el conmutador de la base de tiempos para
que dicho tiempo ocupe el máximo de
la pantalla del osciloscopio.
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 277
MEDICIÓN DE LOS FLANCOS Y TIEMPOS DE SUBIDA
417
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
MEDIDA DEL DESFASE ENTRE SEÑALES
La sección horizontal del osciloscopio posee un control etiquetado como X-Y, que
nos va a introducir en una de las técnicas de medida de desfase (la única que
podemos utilizar cuando solo disponemos de un canal vertical en nuestro osciloscopio).
El periodo de una señal se corresponde con una fase de 360º. El desfase indica
el ángulo de atraso ó adelanto que posee una señal con respecto a otra (tomada como
referencia) si poseen ambas el mismo periodo. Ya que el osciloscopio solo puede medir
directamente los tiempos, la medida del desfase será indirecta.
Uno de los métodos para medir el desfase es utilizar el modo X-Y. Esto implica introducir
una señal por el canal vertical (generalmente el I) y la otra por el canal horizontal
(el II). (Este método solo funciona de forma correcta si ambas señales son senoidales).
La forma de onda resultante en pantalla se denomina figura de Lissajous (debido al
físico francés denominado
Jules Antoine Lissajous). Se puede deducir la fase
entre las dos señales, así como su relación de frecuencias observando la figura
278.
418
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 278
FIGURAS DE LISSAJOUS
419
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCIÒN 4: INTRODUCCIÓN PARA LAS MEDICIÓNES EN DOMINIO DE LAS
FRECUENCIA
EL ANALIZADOR DE ESPECTRO
DIAGRAMA DE BLOQUES DE UN ANALIZADOR DE ESPECTRO
La función del analizador de espectro consiste en, teniendo una señal compleja
visualizar en un tubo de rayos catódicos las frecuencias de las armónicas que
componen la señal.
Se observará un bastón principal de mayor amplitud que corresponde
a la
componente fundamental, y bastones a la derecha que son proporcionales a la amplitud
de la armónica respectiva.
El analizador de espectro permite realizar mediciones del índice de modulación de AM
y FM y determinan sus componentes en frecuencia, además de hacer mediciones de
ruido
El diagrama de bloques del analizador de espectro se muestra en la figura
56.1.
420
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM
FIGURA 279. DIAGRAMA DE BLOQUES DEL ANALIZADOR DE ESPECTRO.
La señal de entrada después de pasar por el atenuador entra a un filtro
pasabajos, este elimina la imagen de entrada la cual representa la banda de frecuencias
de 800 a 1100 Mhz. Posteriormente se ubica un primer mezclador de señal que se
conecta a un oscilador de frecuencia local, este se sintoniza con un diodo Varactor.
El
monitor
del
analizador
de
espectro
es
logarítmico,
se
encuentra
en
decibeles, generalmente dBm. Necesitándose entonces un amplificador logarítmico.
Generalmente el monitor logarítmico tiene de 60 a 90 db, requiriéndose entre 6 y 9
amplificadores
logarítmicos
en
circuitos
proporciona la ganancia del analizador.
420
integrados.
Este
amplificador también
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La figura 280
muestra una señal típica
visualizada
por
el analizador de
espectro se puede observar las componentes de la señal en diferentes valores de
frecuencia
FUENTE HTTP://USUARIOS.IPONET.ES/AGUSBO/OSC/OSC_5.HTM FIGURA 280.
DIAGRAMA DE UNA SEÑAL TÍPICA CON SU COMPONENTE
PRINCIPAL Y FUNDAMENTALES.
CARACTERÍSTICAS GENERALES Y CLASIFICACIÓN
1. Analizadores de espectro de tiempo real o multicanal
Esta compuesto por una serie de filtros pasabanda con frecuencia central corrida, de
esta manera cada filtro permitirá el paso de una banda, el posterior dejará pasar
la banda siguiente y así sucesivamente. Posterior a cada filtro se ubica un detector y
un filtro pasabajos. Si la señal analizada cuenta con componentes en cada uno de
los filtros pasabanda, en la pantalla se mostrará una señal vertical.
421
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
La resolución dependerá del ancho de banda de cada filtro (a menor ancho de banda
mayor resolución), si se quiere tener un analizador con una buena resolución se
necesita un gran número de filtros, por tal razón la banda de frecuencia a analizar no
puede ser muy grande.
Se emplea este tipo de analizador para señales con
frecuencias bajas.
2. Analizadores de espectro de sintonía barrida
Cuentan con solo un filtro pasabanda pero con una frecuencia central que es móvil,
permitiendo esto que la frecuencia sea desplazada a través de un generador de
barrido.
Los analizadores de espectro cuentan con un SCAN que dan la frecuencia por
división (Hz, Khz, o Mhz por división).
Los analizadores de espectro tienen la capacidad adicional de presentar señales
de niveles altos y bajos en forma simultánea, esta capacidad se conoce como
rango dinámico, presentado en db. La señal de entrada al analizador cuenta con
componentes armónicas con diferentes frecuencias y amplitudes, se debe por lo tanto
amplificar las señales débiles y fuertes al mismo tiempo. Cuando se busca amplificar
lo suficiente para detectar señales pequeñas, es posible que se saturen las señales
fuertes. Se busca que la ganancia del amplificador sea variable en función de la
amplitud de la señal recibida, amplificando más las señales débiles que las fuertes.
El rango dinámico consiste en la capacidad de presentar niveles altos y bajos
simultáneamente.
El
empleo
de
amplificadores
logarítmicos
permite conseguir
una ganancia variable. Se utilizan entonces 2 escalas verticales una lineal (LIN) y otra
logarítmica (LOG).
422
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
LECCION 5: INTRODUCCIÒN A LA INSTRUMENTACIÒN VIRTUAL
El concepto
de instrumentación
virtual nace a partir del uso del computador
personal (PC) como "instrumento" de medición de tales señales como temperatura,
presión, caudal, etc.
Es decir, el PC comienza a ser utilizado para realizar mediciones de fenómenos físicos
representados en señales de corriente (Ej. 4-20mA) y/o voltaje (Ej. (05Vdc). Sin embargo, el concepto de "instrumentación virtual" va más allá de la simple
medición de corriente o voltaje, sino que también involucra el procesamiento, análisis,
almacenamiento,
distribución
y
despliegue
de
los datos
e información
relacionados con la medición de una o varias señales específicas. Es decir, el
instrumento virtual no se conforma con la adquisición de
también
involucra
procesamiento
la
interfaz
de señales,
hombre-máquina,
las
rutinas
la
señal,
las funciones
sino
que
de análisis
y
de almacenamiento de datos y la
comunicación con otros equipos.
Veamos un ejemplo; el osciloscopio tradicional tiene una funcionalidad ya predefinida
desde la fábrica donde lo diseñan, producen y ensamblan. Es decir, la funcionalidad
de este tipo de instrumento es definida por el fabricante del equipo, y no por el
usuario mismo. El término "virtual" nace precisamente a partir del hecho de que
cuando se utiliza el PC como "instrumento" es el usuario mismo quién, a través
del
software,
define
su
funcionalidad
y "apariencia" y por ello decimos que
"virtualizamos" el instrumento, ya que su funcionalidad puede ser definida una y
otra vez por el usuario y no por el fabricante.
Para construir un instrumento virtual, sólo requerimos de un PC, una tarjeta de
adquisición de datos con acondicionamiento de señales (PCMCIA, ISA, XT,
423
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
PCI,
etc.)
y
el
software
apropiado,
los
tres
(3)
elementos
clave
en
la
conformación de un instrumento virtual, teniendo un chasis de acondicionamiento
de señales como elemento opcional.
Decimos
que
dependiendo
el
de
"acondicionamiento
cada
señal
y/o
de
señales"
aplicación,
se
es
opcional,
puede
o
no
porque
requerir
amplificación, atenuación, filtraje, aislamiento, etc. de cada señal. Si la señal está
en el rango de los +/- 5Vdc y no se requiere de aislamiento o filtraje, la misma
puede ser conectada directamente la tarjeta de adquisición de datos.
En el instrumento virtual, el software es la clave del sistema, a diferencia del instrumento
tradicional, donde la clave es el hardware. Con el sistema indicado anteriormente,
podríamos construir un osciloscopio "personalizado", con la interfaz gráfica que uno
desee, agregándole inclusive más funcionalidad. Sin embargo, este mismo sistema
puede también ser utilizado en la medición de temperatura, o en el control de
arranque/parada de una bomba centrífuga. Es allí donde radica uno de los
principales beneficios del instrumento virtual, su flexibilidad. Este instrumento virtual
no sólo me permite visualizar la onda, sino que a la vez me permite graficar su espectro
de potencia en forma simultánea.
Para
finalizar,
la
siguiente
tabla
nos
indica
algunas
de
las
principales
diferencias entre el instrumento convencional o tradicional, y el instrumento virtual:
Instrumento Tradicional
Instrumento Virtual
Definido por el fabricante
Definido por el usuario
Funcionalidad
específica,
con Funcionalidad ilimitada, orientado a
conectividad limitada.
aplicaciones, conectividad amplia.
Hardware es la clave.
Software es la clave
424
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Alto costo/función
Bajo
costo/función,
variedad
de
funciones, reusable.
Arquitectura "cerrada"
Lenta
incorporación
Arquitectura "abierta".
de
nuevas Rápida
tecnología.
incorporación
de nuevas
tecnologías, gracias a la plataforma
PC.
Bajas economías de escala, alto Altas economías de escala, bajos
costo de mantenimiento.
costos de mantenimiento.
FUENTE: WWW.NI.COM/LABVIEW
INSTRUMENTO TRADICIONAL Vs INSTRUMENTO VIRTUAL
La flexibilidad, el bajo costo de mantenimiento, la reusabilidad, la personalización de
cada instrumento, la rápida incorporación de nuevas tecnologías, el bajo costo por
función, el bajo costo por canal, etc. son algunos de los beneficios que ofrece la
instrumentación virtual.
La instrumentación virtual puede también ser implementada en equipos móviles
(laptops), equipos distribuidos en campo (RS-485), equipos a distancia (conectados vía
radio, Internet, etc.), o equipos industriales (NEMA 4X, etc.). Existe una tarjeta de
adquisición de datos para casi cualquier bus o canal de comunicación
PCI, USB, serial RS-232/485,
en PC (ISA,
paralelo EPP, PCMCIA, CompactPCI, PCI, etc.), y
existe un driver para casi cualquier sistema operativo (WIN 3.1/95/NT, DOS, Unix, MAC
OS, etc.).
425
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE WWW.NI.COM/LABVIEW
FIGURA 281. INSTRUMENTOS VIRTUALES EN LA INDUSTRIA
Comparación del instrumento virtual versus el tradicional las técnicas utilizadas
normalmente para evaluar las características de medición de un multímetro digital
(DMM)
pueden ser utilizadas
para evaluar
las características
de medición de
un instrumento virtual (VMM)..
Al estudiar profundamente la configuración de los sistemas de adquisición de datos
modernos DAQ (Data Acquisition System), basados en equipos PC (Personal
Computer), se aprecia que una de las partes que componen dichos sistemas,
es
el
software quien controla y administra los recursos del computador, presenta los
datos, y participa en el análisis.
Viéndolo de este modo, el software es un tópico muy importante que requiere de
especial cuidado. Para los sistemas
DAQ se necesita de un software de
instrumentación, que sea flexible para futuros cambios, y preferiblemente que sea de
426
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
fácil manejo, siendo lo mas poderoso e ilustrativo posible.
427
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
DMM
VMM con tarjeta VMM con tarjeta
especializada
de
propósito
general
Hardware utilizado HP 34401 A DMM DAQCard 4050
PCI-MIO-16XE-10
No. de Canales
1
1
16 (Diferencial)
Conversión AC
True RMS
True RMS
True
RMS
(por
software)
Resolución
(convertidor
61/2 - 41/2 dígitos 51/2 dígitos
41/2 dígitos
de
16-bits)
Rango de entrada 100 mV - 750 V
20 mV - 250 V
(ACV)
100mV - 250 V
(con
acondicionamiento
SCXI)
Sensibilidad
0.1 uV
0.1 uV
1.5 uV
20 mV - 250 V
100 mV - 250 V
0.1 uV
0.1 uV
1.5 uV
60 dB
80 dB
variable
(ACV)
Rango de Entrada 100 mV - 1000 V
(DCV)
Sensibilidad
(DCV)
NMRR
428
(80-120
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
429
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
dB)
CMRR
70 dB (AC), 140 90 dB (AC), 30 dB variable
dB (DC)
Velocidad
(DC)
(80-120
dB)
de 5-1 K lecturas/seg 10, 50 , 60 K 100 K lecturas/seg
medición
lecturas/seg
(lecturas/seg.)
FUENTE: WWW.NI.COM/LABVIEW
INSTRUMENTO TRADICIONAL Vs INSTRUMENTO VIRTUAL
Programas y lenguajes de programación que cumplan con lo dicho existen en gran
número en el mercado actual, como por ejemplo el Visual Basic, el C, el C++, el
Visual C++, Pascal, LabWindows CVI, Labview, y muchos otros confeccionados
específicamente para las aplicaciones que los necesiten.
VENTAJAS DE LabVIEW COMO SOFTWARE DE INSTRUMENTACIÓN VIRTUAL
• Es muy simple de manejar, debido a que está basado en un nuevo sistema de
programación gráfica, llamada lenguaje G.
• Es un programa enfocado hacia la instrumentación virtual, por lo que cuenta con
numerosas herramientas
de presentación,
en gráficas, botones,
indicadores y controles, los cuales son muy esquemáticos y de gran elegancia.
Estos serían complicados de realizar en bases como c++ donde el tiempo para lograr
el mismo efecto sería muchas veces mayor.
428
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
• Es un programa de mucho poder donde se cuentan con librerías
especializadas para manejos de DAQ, Redes, Comunicaciones, Análisis Estadístico,
Comunicación con Bases de Datos (Útil para una automatización de una empresa a
nivel total).
• Con este las horas de desarrollo de una aplicación por ingeniero, se reducen a un
nivel mínimo.
• Como se programa creando subrutinas en módulos de bloques, se pueden usar
otros bloques creados anteriormente como aplicaciones por otras
personas.
• Es un programa que permite pasar las aplicaciones entre diferentes
plataformas como Macintosh y seguir funcionando.
INTRODUCCION AL LABVIEW
El LabView es un lenguaje de programación
de alto nivel, de tipo gráfico,
y
enfocado al uso en instrumentación. Pero como lenguaje de programación, debido
a que cuenta con todas las estructuras, puede ser usado para elaborar cualquier
algoritmo que se desee, en cualquier aplicación, como en análisis, telemática, juegos,
manejo de textos, etc.
Cada programa realizado en LabView será llamado Instrumento Virtual (VI), el cual
como cualquier otro programa ocupa espacio en la memoria del computador.
USO DE LA MEMORIA:
La memoria usada la utiliza para cuatro bloques diferentes como son:
429
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
• EL PANEL FRONTAL: Donde se ven los datos y se manipulan y controlan.
• EL DIAGRAMA DE BLOQUES: En este se aprecia la estructura del
programa, su función y algoritmo, de una forma gráfica en lenguaje G, donde los datos
fluyen a través de líneas.
• EL PROGRAMA COMPILADO: Cuando se escribe en LabView, el algoritmo
escrito de forma gráfica no es ejecutable por el computador, por tanto, LabView
lo analiza, y elabora un código Asembler, con base en el código fuente de tipo
gráfico. Esta es una operación automática que ocurre al ejecutar el algoritmo, por
tanto no es importante entender como sucede esto. Lo que si es algo para apreciar, es
que en este proceso, se encuentran los errores de confección que son mostrados en
una lista de errores, donde con solo darle doble click al error, se aprecia en el diagrama
de bloques, donde ocurre éste, para su corrección.
• LOS DATOS: Como el algoritmo maneja datos, requiere de un espacio en
memoria para estos, lo que hace tomar en cuenta que el computador usado debe tener
la memoria suficiente para manejarlos. Por ejemplo, cuando se usan grandes
matrices en cálculos se puede requerir de mucho espacio.
Nota: A un programa VI terminado se le puede borrar el diagrama de bloques para
que ocupe menos memoria, y no pueda ser editado, y seguirá funcionando.
El panel nunca puede ser borrado.
430
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE WWW.NI.COM/LABVIEW
FIGURA 282. APLICATIVOS LabVIEW
431
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FUENTE WWW.NI.COM/LABVIEW
FIGURA 283 MEDICIONES VIRTUALES CON LABVIEW INSTRUMENTOS
VIRTUALES
Un programa creado en LabVIEW es llamado como Instrumento Virtual y consta
de tres partes a crear.
• El Panel frontal, donde estarán ubicados todos los indicadores y controles que el
usuario podrá ver cuando el programa este en funcionamiento. Por
ejemplo botones, perillas, gráficas,etc.
432
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
Paleta de herramientas
Menus
Título
Icono
Boton
Control
Barra de
desplazamiento
Gráfica
FUENTE WWW.NI.COM/LABVIEW
FIGURA 284 EL PANEL FRONTAL
• El diagrama de bloques muestra el programa en código gráfico G. Se usan en este
diagrama estructuras de programación, y flujo de datos entre las
diferentes entradas y salidas, a través de líneas. En este las subrutinas son mostradas
como iconos de cajas negras, con unas entradas y unas salidas determinadas, donde
en el interior se cumple una función específica. El flujo se aprecia, como se dibujaría
en un bosquejo de sistemas, cuando se habla
433
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
de teoría de sistemas, donde cada subsistema se representa como un cuadro
con entradas y salidas.
Todos
los
indicadores
y
controles
ubicados
en
el
panel
frontal
están
respaldados por un terminal de conexión en el diagrama de bloques tal como si se
tuviera un tablero de control de una máquina o un avión, donde por el frente se ven
los indicadores y por el lado posterior se aprecian todos los cables y
terminales de conexión.
FUENTE WWW.NI.COM/LABVIEW
FIGURA 285 DIAGRAMA DE BLOQUES
• El icono de conexión. Se usa para utilizar el programa creado como subrutina
434
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
en otro programa, donde el icono será la caja negra, y las entradas
435
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
son las conexiones a los controles del programa subrutina, y las salidas son las
conexiones a los indicadores del mismo subprograma. Al crear el icono, se conecta a
través del alambre de soldadura a
los indicadores y controles en la forma que se
desee que se distribuyan las entradas y salidas en la caja negra, tal como en un
circuito integrado algunos pines corresponden a alguna función en él. La idea es
crear un sistema de programación modular, donde cada rutina creada llame otras
rutinas, y estas a su vez otras de menor nivel, en una cadena jerárquica con
cualquier límite deseado. Así cuando
se
use
un
módulo,
no
se
requiere
saber como funciona interiormente, simplemente solo basta conocer sus entradas y
salidas para ser así usado.
Para saber el uso de los subvis, la ventana de “help” ofrece la información
pertinente a las entradas y salidas. Esta ventana se puede obtener presionando
Ctrl-h o por medio del menu “Windows”
FUENTE WWW.NI.COM/LABVIEW
436
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
FIGURA 286. VENTANA HELP DE INFORMACIÓN
PALETAS DE TRABAJO
Tanto en el panel frontal como en el diagrama de bloques, existe una paleta de
herramientas, que sirve tanto para editar el VI, o ejecutarlo según el modo de trabajo
que se tenga.
Cuando se trabaja en modo de ejecución, la paleta es la de la figura 287
Imprimir
Panel
Highligh
t
Modo de corrido
Grabar
Panel
Ejecutar
Punto de paro
Modo
Corrido
sucesiv
o
Sto
p
FUENTE WWW.NI.COM/LABVIEW
FIGURA 287. PALETA DE EJECUCIÓN DE PROGRAMA
• Con el botón
“Ejecutar” se corre una vez el programa. Cuando está
ejecutando, se cambia a rayado como se aprecia en la figura y aparece un
botón
de
“Stop”
con
el
cual
se
pede
detener
el
programa.
No
es
recomendado hacer esto, es preferible crear un algoritmo de paro del programa,
con un botón destinado exclusivamente para esto.
Algunos programas al terminar deben de ejecutar algunas operaciones de cierre,
436
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
como puede ser en la programación de tarjetas de adquisición de datos,
437
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
o en el cierre de archivos, por tanto si se usa el botón de stop, este parará el programa
totalmente, en el punto en el que se encontraba y no permitirá que complete
sus
rutinas de cierre, pudiendo incurrir en errores y perdida de la información.
Cuando la flecha aparece rota indica que hay un error en el programa. Al hacer clic se
muestra una lista de errores, y al hacer clic en cada uno de los errores se apreciará
en el diagrama la ubicación de la falla.
• “Modo” cambia entre modo de edición y modo de ejecución. Así está en modo de
ejecución.
• “Corrido sucesivo” hace que el programa ejecute una ves tras otra hasta
que se le de un paro con el botón de stop.
• “Punto de paro” al ser presionado cambia a “!”, así, al ser llamado como subrutina,
abrirá el panel frontal para mostrar como cambia, para encontrar errores de lógica, o por
simple visualización.
• “Modo de corrido” Al ser presionado cambia a una línea por pasos, así el programa
ejecutará paso a paso. cada paso se dará al oprimir el icono de un
solo paso.
• “Highlight” Muestra como fluyen los datos y que datos, a través de las líneas del
diagrama de bloques.”
• “Imprimir Panel” Imprime el panel frontal actual cuando termina de ejecutar
el programa.
• “Grabar Panel” Almacena en un archivo .LOG el estado actual del panel frontal.
En el modo de edición la paleta es la de la figura 148.
• “Operador” Sirve para accionar los controles e indicadores.
• “Posicionador” Sirve para cambiar de posición los diferentes elementos en
las diferentes pantallas. También permite cambiar el tamaño de estos.
438
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
• “Texto” Permite crear textos y etiquetas, tanto como cambiar los valores de
las escalas de las gráficas.
• “Alambrador” Sirve para conectar los elementos en el diagrama de bloques,
y para conectar los controles e indicadores a los pines del ícono del
programa.
• “Color” Permite colorear los diferentes elementos.
Texto
Alambrador
Operador
Ejecución
Color
Modo
Posicionador
FUENTE WWW.NI.COM/LABVIEW
FIGURA 288. PALETA DE EDICIÓN
En realidad esta es una pequeña reseña del poderoso programa LabVIEW; no obstante
en esta lección se tomaron tips muy importantes los cuales son base para una posterior
profundización del tema.
439
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
Escuela de Ciencias Básicas, Tecnologías e Ingenierías
Tecnología en Audio
BIBLIOGRAFIA
•
•
•
ELECTRIC CIRCUIT THEORY, R. Yorke. Ed. Pergamon Press, 1986.
CIRCUITOS Y SEÑALES, R.E. Thomas. Ed. Reverté, 1991.
ANÁLISIS BÁSICO DE CIRCUITOS ELÉCTRICOS, D.E. Johnson. Ed.
Prentice Hall Hispanoamericana, 1996.
• TEORÍA DE CIRCUITOS ELÉCTRICOS, R. Sanjurjo, E. Lázaro, P. de
Miguel. Ed. McGraw-Hill, 1997.
• TEORÍA DE CIRCUITOS, A. Bruce Carlson. Ed. Thomson, 2002.
• TEORÍA MODERNA DE CIRCUITOS ELÉCTRICOS, Madrigal
•
APUNTES DE LA ASIGNATURA. Unicopia, 2003. TOMO I y II: Circuitos. DIRECT
AND ALTERNATING CURRENT CIRCUITS, B. Grob. Ed. McGraw-Hill, 1986.
• INTRODUCCIÓN AL ANÁLISIS DE CIRCUITOS, D.E. Scott. Ed.
McGraw-Hill, 1988.
• ANÁLISIS DE CIRCUITOS EN INGENIERÍA, W.H. Hayt. Ed. McGrawHill, 1993.
• CIRCUITOS ELÉCTRICOS, J.W. Nilsson. Ed. Addison-Wesley
Iberoamericana, 1995.
440