Métodos generalizados para el cálculo estático de estructuras
Anuncio

Proyecto Final de Carrera
Métodos generalizados para el cálculo estático de
estructuras de cables y simulación de la interacción
dinámica catenaria pantógrafo según la norma
europea EN50318
D. Miguel Such Taboada
Director
Dr. D. Alberto Carnicero López
Madrid, 25 de mayo de 2008
Índice general
1. Introducción
1
2. Objetivos
3
3. Historia de la ecuación de la catenaria
5
4. Clasicación de las estructuras de cables
9
4.1.
4.2.
4.3.
Estructuras de cables lineales
. . . . . . . . . . . . . . . . . . . . .
4.1.1.
Líneas de transmisión de energía eléctrica
4.1.2.
Catenarias de trenes de alta velocidad
9
. . . . . . . . . .
10
. . . . . . . . . . . .
12
4.1.3.
Puentes colgantes . . . . . . . . . . . . . . . . . . . . . . . .
15
4.1.4.
Arcos
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
4.1.5.
Sistemas de transporte por cables . . . . . . . . . . . . . . .
19
Estructuras de cables planas . . . . . . . . . . . . . . . . . . . . . .
20
4.2.1.
21
Cubiertas de edicios . . . . . . . . . . . . . . . . . . . . . .
Estructuras de cables tridimensionales
. . . . . . . . . . . . . . . .
22
I Equilibrio estático de estructuras de cables
24
5. Métodos de cálculo. Estado del arte
26
5.1.
Método de desplazamientos no lineales
5.1.1.
5.2.
. . . . . . . . . . . . . . . .
29
Redes de cables . . . . . . . . . . . . . . . . . . . . . . . . .
29
El método de la rejilla
. . . . . . . . . . . . . . . . . . . . . . . . .
I
31
II
ÍNDICE GENERAL
5.3.
Método de la densidad de fuerza . . . . . . . . . . . . . . . . . . . .
34
5.4.
Método de determinación de tensiones por mínimos cuadrados
37
. . .
6. Desarrollo teórico del método propuesto
40
6.1.
Formulación en coordenadas locales . . . . . . . . . . . . . . . . . .
41
6.2.
Formulación en coordenadas globales
44
6.2.1.
. . . . . . . . . . . . . . . . .
Consideraciones sobre el cable elástico
. . . . . . . . . . . .
47
6.3.
Generalización a 3D
. . . . . . . . . . . . . . . . . . . . . . . . . .
48
6.4.
Ensamblado y resolución . . . . . . . . . . . . . . . . . . . . . . . .
49
6.4.1.
Referencias teóricas del problema
. . . . . . . . . . . . . . .
52
6.4.2.
Familia de métodos Gauss-Newton
. . . . . . . . . . . . . .
52
6.4.3.
Familia de métodos de región de conanza
. . . . . . . . . .
7. Vericación de la implementación del modelo
54
57
7.1.
Contrastación con el método de elementos nitos (MEF)
. . . . . .
57
7.2.
Simulación de sistema de transporte triangular . . . . . . . . . . . .
59
7.3.
Comparación de un sistema de cables en 3D
62
7.4.
Comparativa de cálculo de rigidez de una catenaria ferroviaria
7.5.
Sistemas de transporte por cables conectados por poleas
7.6.
. . . . . . . . . . . . .
. . .
64
. . . . . .
66
Cálculo del pendolado de una catenaria de tren de velocidad alta . .
68
8. Ejemplo de aplicación
8.1.
Creación de una malla de elementos nitos . . . . . . . . . . . . . .
73
73
9. Conclusiones
77
II Interacción Dinámica Catenaria-Pantógrafo
79
10.Estado del Arte
81
11.Formulación del problema dinámico en cables
84
11.1. Formulación del elemento co-rotacional . . . . . . . . . . . . . . . .
89
ÍNDICE GENERAL
III
12.Formulación del contacto catenaria-pantógrafo
98
13.Integración temporal
107
13.1. La familia
β -Newmark
13.2. El método
α-Generalizado
. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .
110
112
14.Validación con la norma EN50318
114
15.Conclusiones
119
III Reducción Dinámica mediante Física Multicuerpo
120
16.Estado del arte
122
17.Frecuencias naturales y modos de vibración
124
17.1. Frecuencias propias en catenarias ferroviarias . . . . . . . . . . . . .
18.El método de la superposición modal
18.1. Condiciones iniciales
126
130
. . . . . . . . . . . . . . . . . . . . . . . . . .
19.Mecánica multicuerpo
132
134
19.1. Acoplamiento de modelos físicos . . . . . . . . . . . . . . . . . . . .
134
19.2. Aplicación a catenarias con modelos FEM
137
. . . . . . . . . . . . . .
20.Modelo multicuerpo jerárquico para la reducción del sistema
140
20.1. Formulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
142
20.2. Resultados y vericación . . . . . . . . . . . . . . . . . . . . . . . .
144
20.3. Análisis de sensibilidad . . . . . . . . . . . . . . . . . . . . . . . . .
146
21.Conclusiones
156
ÍNDICE GENERAL
IV
IV Conclusiones y Aportaciones Originales
158
V Bibliografía
163
Índice de guras
3.1.
Ejemplo de tienda romana . . . . . . . . . . . . . . . . . . . . . . .
6
3.2.
Comparación entre una parábola y una catenaria
. . . . . . . . . .
7
4.1.
Línea de transporte de Energía eléctrica
. . . . . . . . . . . . . . .
11
4.2.
Partes de una catenaria . . . . . . . . . . . . . . . . . . . . . . . . .
13
4.3.
Detalle de la sustentación de una catenaria
. . . . . . . . . . . . .
14
4.4.
Puente sobre el río Min, China . . . . . . . . . . . . . . . . . . . . .
16
4.5.
Puente sobre el río Ródano . . . . . . . . . . . . . . . . . . . . . . .
16
4.6.
Simulación numérica de una arcada [AGR06] . . . . . . . . . . . . .
18
4.7.
Primera página del libro de De Ulloa
. . . . . . . . . . . . . . . . .
19
4.8.
Foto aérea de un teleférico . . . . . . . . . . . . . . . . . . . . . . .
20
4.9.
Simple estructura de tensegridad
. . . . . . . . . . . . . . . . . . .
23
5.1.
Nodo de una red de cables . . . . . . . . . . . . . . . . . . . . . . .
28
5.2.
Método de los desplazamientos no lineales
. . . . . . . . . . . . . .
31
5.3.
Red de cables con proyección ortogonal . . . . . . . . . . . . . . . .
32
6.1.
Sistema de Coordenadas Locales . . . . . . . . . . . . . . . . . . . .
42
6.2.
Relación entre coordenadas locales y globales . . . . . . . . . . . . .
44
6.3.
Diagrama de cuerpo libre . . . . . . . . . . . . . . . . . . . . . . . .
46
6.4.
Simple estructura de cables
. . . . . . . . . . . . . . . . . . . . . .
50
7.1.
Validación con MEF
. . . . . . . . . . . . . . . . . . . . . . . . . .
58
7.2.
Esquema de la disposición del sistema de transporte triangular . . .
60
V
VI
ÍNDICE DE FIGURAS
7.3.
Situación inicial y nal de la estructura . . . . . . . . . . . . . . . .
63
7.4.
Cálculo del equilibrio de un cable
64
7.5.
Catenaria utilizada por Wu y Brennan
7.6.
Comparación en la distribución de rigidez
. . . . . . . . . . . . . .
66
7.7.
Contraste gráco de los resultados obtenidos . . . . . . . . . . . . .
68
8.1.
Posición de equilibrio de la catenaria
74
8.2.
Vano central de la catenaria con malla MEF
. . . . . . . . . . . . .
75
8.3.
Desplazamientos desde el equilibrio de los nodos . . . . . . . . . . .
76
11.1. Prisma diferencial sometido a esfuerzo axil . . . . . . . . . . . . . .
85
11.2. Deformación de green . . . . . . . . . . . . . . . . . . . . . . . . . .
86
11.3. Deformación plana
. . . . . . . . . . . . . . . . . . . . . . . . . . .
88
11.4. Deformación del elemento corrotacional . . . . . . . . . . . . . . . .
90
12.1. Problema de contacto generalizado
. . . . . . . . . . . . . . . . . .
98
. . . . . . . . . . . . . . . . . . . . .
100
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
103
12.4. Penetración en arista . . . . . . . . . . . . . . . . . . . . . . . . . .
104
14.1. Catenaria de referencia EN50318 (10 vanos)
. . . . . . . . . . . . .
115
14.2. Geometría y desplazamiento en los vanos centrales a 250 km/h . . .
116
14.3. Geometría y fuerza de contacto en los vanos centrales a 250 km/h .
117
14.4. Geometría y desplazamiento en los vanos centrales a 300 km/h . . .
117
14.5. Geometría y fuerza de contacto en los vanos centrales a 300 km/h .
118
17.1. Catenaria denida por la norma EN50318
. . . . . . . . . . . . . .
127
17.2. Modo de vibración 1 (1.0182 Hz)
. . . . . . . . . . . . . . . . . . .
127
17.3. Modo de vibración 3 (3.0555 Hz)
. . . . . . . . . . . . . . . . . . .
128
17.4. Modo de vibración 5 (5.0938 Hz)
. . . . . . . . . . . . . . . . . . .
129
17.5. Modo de vibración 7 (7.1341 Hz)
. . . . . . . . . . . . . . . . . . .
129
12.2. Sistemas de referencia locales
12.3. Penetración
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
65
VII
ÍNDICE DE FIGURAS
19.1. Sistema multicuerpo
. . . . . . . . . . . . . . . . . . . . . . . . . .
136
19.2. Catenaria ferroviaria EN50318 de 3 vanos . . . . . . . . . . . . . . .
138
19.3. Descomposición de la catenaria por vanos . . . . . . . . . . . . . . .
138
y
B 139
20.1. Descomposición de la catenaria por vanos . . . . . . . . . . . . . . .
141
20.2. Paso de vano modal a vano FEM
. . . . . . . . . . . . . . . . . . .
141
20.3. Paso de vano FEM a vano Modal
. . . . . . . . . . . . . . . . . . .
141
19.4. Ampliación de la ligadura en el hilo de contacto entre los vanos
A
20.4. Fuerza de contacto: FEM vs. multicuerpo FEM-Modal
. . . . . . .
145
20.5. Desplazamientos: FEM vs. multicuerpo (FEM+Modal)
. . . . . . .
146
20.6. Fuerza de contacto con 15 metros de análisis FEM . . . . . . . . . .
148
20.7. Fuerza de contacto con 20 metros de análisis FEM . . . . . . . . . .
149
20.8. Fuerza de contacto con 30 metros de análisis FEM . . . . . . . . . .
149
20.9. Fuerza de contacto con 50 metros de análisis FEM . . . . . . . . . .
151
20.10.Fuerza de contacto con análisis modal de 30 modos de vibración . .
152
20.11.Desplazamiento con 15 metros de análisis FEM
. . . . . . . . . . .
152
20.12.Desplazamiento con 20 metros de análisis FEM
. . . . . . . . . . .
153
20.13.Desplazamiento con 30 metros de análisis FEM
. . . . . . . . . . .
153
20.14.Desplazamiento con 50 metros de análisis FEM
. . . . . . . . . . .
154
20.15.Desplazamiento con análisis modal de 30 modos de vibración . . . .
154
20.16.Análisis de tiempos . . . . . . . . . . . . . . . . . . . . . . . . . . .
155
Índice de tablas
6.1.
Ensamblado del sistema de ecuaciones
. . . . . . . . . . . . . . . .
50
6.2.
Algoritmo de Gauss-Newton . . . . . . . . . . . . . . . . . . . . . .
53
6.3.
Algoritmo de la región de conanza . . . . . . . . . . . . . . . . . .
55
7.1.
Comparación de resultados (Caso I) . . . . . . . . . . . . . . . . . .
59
7.2.
Comparación de resultados (caso II.a) . . . . . . . . . . . . . . . . .
61
7.3.
Comparación de resultados (Caso II.b)
. . . . . . . . . . . . . . . .
62
7.4.
Desviación del punto de equilibrio . . . . . . . . . . . . . . . . . . .
64
7.5.
Comparación con los resultados de Peyrot
. . . . . . . . . . . . . .
65
7.6.
Comparativa de cálculo de rigidez . . . . . . . . . . . . . . . . . . .
67
7.7.
Contraste numérico de los resultados
. . . . . . . . . . . . . . . . .
69
7.8.
Datos de la catenaria CRU 220
. . . . . . . . . . . . . . . . . . . .
70
7.9.
Validación de la catenaria CRU 220 con 1 vano
. . . . . . . . . . .
71
7.10. Validación O.Lopez-Garcia - Catenaria CRU220 - 4 vanos . . . . . .
72
14.1. Validación con el modelo de referencia
. . . . . . . . . . . . . . . .
116
17.1. Sensibilidad del mallado de las frecuencias naturales . . . . . . . . .
128
20.1. Comparativa de resultados en fuerzas . . . . . . . . . . . . . . . . .
150
20.2. Comparativa de resultados en desplazamientos . . . . . . . . . . . .
151
VIII
Capítulo 1
Introducción
Los antecedentes de este trabajo se encuentran en la formulación e implementación de métodos numéricos ecaces para el análisis de las catenarias ferroviarias más
habituales en Europa que venía realizando un grupo de investigación en la ETSIICAI de la Universidad Ponticia Comillas dirigido por el director de este proyecto.
El autor del mismo contactó con dicho grupo y se planteó la posibilidad de realizar
una formulación e implementación de un método general para el análisis estático,
no sólo de catenarias ferroviarias, sino de cualquier tipo de estructura de cables.
Además, se planteó la posibilidad utilizar dicho método para continuar con el desarrollo de un modelo de la interacción dinámica entre el pantógrafo y la catenaria de
trenes de alta velocidad. Para ello, se estudió el trabajo realizado anteriormente y se
ha tratado de superar para cumplir con la normativa europea EN50318 relativa a la
validación modelos de simulación dinámica de la interacción catenaria-pantógrafo.
Un código certicado permite validar catenarias para que puedan ser instaladas
en las lineas ferroviarias europeas cumpliendo con lo establecido en las normas de
interoperabilidad. La mayoría de los métodos de análisis estáticos de estructuras de
cables están formulados de forma especíca para cada problemática. En el caso de
cambiar alguno de los parámetros que denen el problema o tratar de extenderlos
a otros tipos dejan de ser válidos. Por otro lado, actualmente existen pocos códigos
de simulación de la interacción catenaria-pantógrafo aptos para certicar catenarias
1
CAPÍTULO 1.
INTRODUCCIÓN
2
ferroviarias. El trabajo realizado en este campo es el que se resume en el documento
presentado. El documento se dividirá en tres partes claramente diferenciadas. En
la primera parte se procederá al desarrollo, formulación y validación del método
para calcular el equilibrio estático de cualquier estructura de cables. En la segunda parte, se desarrollará, formulará y validará el modelo de interacción dinámica
pantógrafo-catenaria y se validará según la normativa europea EN50318. Para ello
se implementará una herramienta nueva de elementos nitos en MATLAB para poder implementar los nuevos modelos numéricos. La tercera parte, aprovechando la
exibilidad del código de elementos nitos y la potencia del método presentado en
la segunda parte, trata de obtener un modelo simplicado que permita optimizar el
diseño de catenarias ferroviarias en un tiempo razonable. Cada parte consta de una
breve revisión del estado del arte sobre cada uno de los temas a tratar, la formulación teórica de cada uno de los métodos, la validación de los respectivos métodos y
diferentes casos de estudio y una breve conclusión.
Capítulo 2
Objetivos
Los objetivos planteados en la realización de este proyecto son:
1. Realizar una profunda revisión sobre los métodos empleados hasta el momento
para la resolución de problemas de estructuras con cables.
2. Recopilar todos los trabajos posibles, experimentales o teóricos, que presenten
resultados con los que validar los modelos que se desarrollen.
3. Desarrollar un modelo general para el cálculo de la posición de equilibrio
estático de estructuras tridimensionales de cables basado en la ecuación exacta
de la catenaria.
4. Implementar dichos modelos en un código ampliamente utilizado de propósito
general como es Matlab. La implementación debe ser lo sucientemente exible
para permitir la reproducción de cualquier problema de estructuras con cables.
5. Vericar, empleando la información recogida en la literatura cientíca, la validez del método desarrollado comprobando su exactitud, robustez y exibilidad.
6. Desarrollar un modelo de la interacción dinámica pantógrafo-catenaria basado
en el método de los elementos nitos que tenga la precisión requerida por la
norma europea EN50318 [CEN99].
3
CAPÍTULO 2.
OBJETIVOS
4
7. Implementar en un código de propósito general una herramienta que permita
resolver problemas mediante el método de los elementos nitos. Debe hacerse de una manera lo sucientemente exible como para introducir el nuevo
modelo dinámico de interacción catenaria-pantógrafo.
8. Vericar la validez del método mediante los requisitos especicados en la norma europea EN50318 y comprobando su exactitud, robustez y exibilidad.
9. Desarrollar un modelo reducido de la interacción catenaria-pantógrafo mediante la aplicación de técnicas multicuerpo jerárquicas con asignación dinámica
de modelos.
10. Introducir dicho modelo en la herramienta de elementos nitos desarrollada
en este proyecto.
11. Extraer las conclusiones oportunas en cuanto a la validez de los modelos.
Capítulo 3
Historia de la ecuación de la
catenaria
Desde que el hombre aprendió a anudar y tejer bras naturales, formando así
las primeras cuerdas, las ha utilizado para construir diferentes estructuras. En un
principio, éstas tan solo servían como herramientas de caza y pesca. Posteriormente
comenzaron a utilizarse con nes constructivos; los barcos de antiguas civilizaciones como la vikinga o la egipcia ofrecen una de las primeras referencias de estos
usos, pues estaban provistos de redes para soportar y fortalecer sus velas [CCH84].
Sin embargo, el ámbito náutico no fue el único beneciado: a nivel más cotidiano,
las primeras civilizaciones también se ayudaban del uso de cuerdas en tensión para
levantar tiendas, así como para dotar de más estabilidad a las carpas una vez levantadas (sirvan como ejemplo las tiendas que solían transportar las legiones romanas
durante las largas campañas de guerra).
Por otro lado, también se hizo necesario salvar desniveles para poder desplazarse con más comodidad y velocidad. Ya en las civilizaciones del mundo antiguo,
chinos e incas necesitaron, al aumentar las relaciones sociales y económicas de la
época, cruzar ríos y montañas con mayor velocidad. Con este n se construyeron
los primeros puentes colgantes. Estos puentes tenían la virtud de ser fáciles de fabricar y requerían un material muy ligero. Los primeros eran muy rudimentarios.
5
CAPÍTULO 3.
HISTORIA DE LA ECUACIÓN DE LA CATENARIA
6
Figura 3.1: Ejemplo de tienda romana
No pasaban de cuerdas o cadenas anudadas, pero la técnica de fabricación se fue
perfeccionando con el tiempo, obteniéndose los precursores de los cables de acero
tan usados hoy en día.
Con el avance de la ciencia y la tecnología empezaron a surgir nuevas estructuras de cables. La electricación de las ciudades hizo necesario el transporte de
electricidad a través de grandes líneas aéreas. Asimismo, los ferrocarriles abandonaron progresivamente el motor de vapor, y empezaron a estudiarse nuevos métodos
para transmitir energía a los trenes. Los edicios, entregados al arte, empezaron
a diseñarse con cubiertas curvas utilizando entramados de cables en tensión. La
complejidad creciente de este tipo de estructuras hizo necesario entender mejor el
comportamiento mecánico de los materiales.
Ya en el siglo XV, Leonardo da Vinci había empezado a preguntarse cómo se
comportaría un cable en tensión. En alguno de sus bocetos, Da Vinci fue el primero
en dibujar una catenaria. En 1615 Beeckman diseñó un puente colgante suponiendo
que la curva que éste adoptaba era una parábola. No obstante, esta solución no fue
ampliamente conocida hasta que, dos siglos después, volviera a ser redescubierta
por el ingeniero ruso Fuss, ahijado de Euler, a quien se encargó que diseñara un
puente sobre el río Neva en San Petersburgo. Galileo, en
matematiche, intorno à due nuove scienze,
Discorsi e dimostrazioni
publicado en 1638, armó que la forma
CAPÍTULO 3.
HISTORIA DE LA ECUACIÓN DE LA CATENARIA
7
que debe adoptar una cadena al ser colgada entre dos puntos debe ser parabólica,
conclusión a la que llegó tomando como modelo el vuelo de un proyectil [Irv81].
A mediados del siglo XVII el astrónomo, físico y matemático holandés Christiaan
Huygens ya sabía que Galileo estaba equivocado. No obstante, como dijo Huygens,
la diferencia entre las dos curvas no es muy grande tal y como se ve en la gura 3.2.
Parabola
Catenaria
2.4
2.2
2
1.8
1.6
1.4
1.2
1
0.8
−1.5
−1
−0.5
0
0.5
1
1.5
Figura 3.2: Comparación entre una parábola y una catenaria
En 1690 Jacob Bernoulli publicó
Acta Erudiatorum,
documento en el que se ex-
plica por primera vez el concepto de integral. Para mostrar la potencia de la nueva
herramienta de cálculo, Jacob propuso utilizarla para resolver denitivamente el
problema al que Galileo no supo dar la solución correcta. Este reto fue resuelto
facto
de
por tres personas: John Bernoulli (hermano de Jacob), Leibnitz y Huygens.
Bernouilli y Leibniz aplicaron el cálculo diferencial, por aquel entonces recién descubierto. Huygens, por su parte, utilizó un método gráco. Es difícil saber quién lo
hizo primero, ya que las respuestas se publicaron en un corto espacio de tiempo y
la mala relación entre los autores no facilitó la tarea.
Los hermanos Bernoulli además formularon la ecuación diferencial de equilibrio de
una cadena sometida a diferentes estados de carga. Dentro de sus análisis llegaron
a incluir la deformación elástica de los cables aplicando la ley de Hooke a sus ecuaciones.
CAPÍTULO 3.
HISTORIA DE LA ECUACIÓN DE LA CATENARIA
Huygens fue quien le dio el nombre de
catenaria
8
a la curva. Este nombre proviene
de la palabra latina catenarius , que signica cadena. También se le llamó funicular, basado en la denominación latina para cuerda. Hoy en día se reserva esta
denominación para los vehículos o artefactos cuya tracción se realiza por medio de
una cuerda, cable o cadena.
El incremento de la complejidad de los problemas estructurales continuó planteando nuevos retos similares al de la forma de la catenaria. Un profundo estudio en
el estudio de la historia de la resistencia de materiales se encuentra en el excelente
libro de Timoshenko Historia de la resistencia de materiales [Tim83]. Por otro
lado, no se debe olvidar la estrecha relación de este tema con el núcleo central del
presente trabajo: la resistencia de materiales ha desempeñado un papel fundamental
en el diseño y construcción de un sinnúmero de obras de la ingeniería, cuya belleza
aún hoy nos sigue sobrecogiendo.
Capítulo 4
Clasicación de las estructuras de
cables
Hoy en día el uso de los cables para la formación de estructuras se halla ampliamente extendido. Este fenómeno se explica al comparar el coste que suponen
las estructuras rígidas con el desembolso, signicativamente menor, que demandan
las estructuras de cables. Atendiendo a su conguración espacial, éstas se pueden
dividir en tres grandes grupos: las estructuras de cables lineales, usadas generalmente en transporte, ya sea de energía o de objetos; las estructuras de cables planas,
que gozan de una creciente popularidad debido a su belleza artística, y que se usan
principalmente en edicaciones a modo de cubiertas (deben incluirse en este grupo
las estructuras en forma de membrana); y, por último, las estructuras tridimensionales, las menos usuales y quizás las de menor interés práctico en la actualidad, a
pesar de que en la naturaleza se encuentran muy a menudo mallas tridimensionales,
compuestas por bras exibles con una innidad de utilidades.
4.1. Estructuras de cables lineales
Las estructuras de cables lineales tienen la característica de avanzar en una
dimensión. En general, cada cable de la estructura sólo conecta con otro cable en
9
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
10
un punto llamado habitualmente nudo, si bien en algunos casos, como en el de las
catenarias ferroviarias, se forman mallas verticales para aumentar la rigidez, con
lo que conectaría con más de un cable. Para avanzar sin contactar con el suelo, la
estructura está soportada con unos apoyos cuya distancia depende de la tensión
del cable, su peso y la caída permitida. A los tramos de cable conectados entre dos
apoyos se les llama vanos. La tensión de la línea suele transmitirse a través de
poleas situadas en los apoyos. Sin embargo, debido al rozamiento que aparece en
estas poleas no es posible tener un cable continuo con una sola tensión, sino que se
deben formar diferentes tramos independientes mecánicamente. A continuación se
presentan algunas de las tipologías más habituales.
4.1.1. Líneas de transmisión de energía eléctrica
La red de transporte de energía eléctrica es la parte del sistema de suministro
eléctrico constituida por los elementos necesarios para llevar hasta los puntos de
consumo, y a través de grandes distancias, la energía generada en las centrales
hidroeléctricas, eólicas, térmicas, de ciclo combinado o nucleares.
Para ello, la energía eléctrica producida debe ser transformada previamente a
un nivel superior de tensión. Esto es necesario, ya que, para un determinado nivel
de potencia a transmitir, al elevar el voltaje se reduce la corriente y, por lo tanto,
se reducen las pérdidas por efecto
Joule.
Parte fundamental de la red de transporte de energía eléctrica son las líneas
de transporte. Se llama línea de transporte de energía eléctrica o línea de alta
tensión al medio físico mediante el cual se realiza la transmisión de la energía
eléctrica a grandes distancias. Está constituida tanto por el elemento conductor,
usualmente cables de aleaciones de cobre o aluminio, como por sus elementos de
soporte, las torres de alta tensión.
Al estar éstas formadas por estructuras hechas de perles de acero, como medio
de sustentación del conductor se emplean aisladores de disco, y herrajes para soportarlos. El proceso de tendido de una línea para transporte de energía eléctrica es una
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
11
técnica bien conocida. Se colocan unas poleas ancladas a las cadenas de aisladores
que cuelgan de las crucetas de las torres y se pasa el cable. Posteriormente se procede al tensado y al engrapado del cable a las cadenas de aisladores; las compañías
suelen exigir que las cadenas de aisladores queden en posición vertical. El proceso
para obtener esta disposición se denomina engrapado.
Figura 4.1: Línea de transporte de Energía eléctrica
Existen diversos métodos de cálculo para determinar la posición de las grapas;
sin embargo, la mayoría de ellos son muy simplicados, como lo demuestra la gran
variedad de resultados que se obtiene para cálculos realizados sobre un mismo conjunto de vanos. A un conjunto de vanos unidos por poleas se le llama cantón. Con el
método presentado en este trabajo sería posible calcular de manera exacta, teniendo
en cuenta tanto la deformación elástica debido a la tensión como a la provocada
por una distribución de temperaturas en los cables, la longitud y la tensión de cada
tramo, así como la distancia entre el suelo y el cable conductor. Además es posible
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
12
calcular el punto en el que se deben anclar las grapas. Esta información es crítica
para el diseño de la línea ya que la capacidad de la misma dependerá de la altura
a la que estén los conductores en su punto mínimo. Algunas herramientas actuales
ofrecen cálculos aproximados, pero generalmente no incorporan el efecto producido por la temperatura del cable. Gracias al modelo desarrollado no sólo es posible
realizar dicho cálculo de una forma rápida y able, sino que además es posible aplicar métodos de optimización de estructuras para mejorar el diseño de este tipo de
líneas, minimizando así coste, consumo y riesgo de fallo.
4.1.2. Catenarias de trenes de alta velocidad
En el sector ferroviario, con la palabra catenaria se denomina a todo el conjunto
de elementos que constituye la línea aérea de transporte y suministro de energía
eléctrica a los trenes. Está situada sobre los raíles y avanza mayoritariamente en su
misma dirección, aportando la energía eléctrica necesaria mediante un elemento de
frotación denominado pantógrafo. El elemento fundamental de la catenaria es el
cable de frotación con el pantógrafo de la locomotora; a este cable se le denomina
hilo de contacto(ver gura 4.2). Para que el rozamiento entre el pantógrafo de la
locomotora y el hilo de contacto sea lo más homogéneo posible, es necesario que el
hilo de contacto mantenga constante su altura respecto a los carriles.
Cuando las velocidades a las que se desplazan los trenes son relativamente bajas,
de hasta 50 km/h aproximadamente, es suciente en el montaje de los hilos de
contacto que la diferencia de altura entre los apoyos y el centro del vano sea del 1
por 1000 de la longitud del vano, y con un máximo de 20 cm, valores que se pueden
conseguir mediante el propio tense mecánico del hilo de contacto.
Sin embargo, cuando la velocidad aumenta, esta diferencia de alturas entre el
apoyo y el centro del vano se vuelve más crítica, siendo necesaria una mayor uniformidad en las alturas. Como el tense mecánico del hilo de contacto no puede
aumentar indenidamente, es necesario tender otro cable, denominado sustentador, y sujetar el hilo de contacto al nuevo cable tendido mediante unas retenciones,
CAPÍTULO 4.
13
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
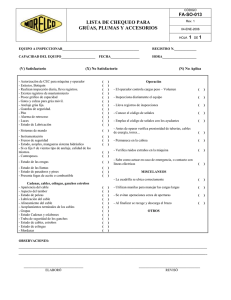
Hilo Sustentador
Hilo de contacto
Pendola
Pendola en Y
1.2
1
Altura [m]
0.8
0.6
0.4
0.2
0
−0.2
0
20
40
60
Distancia [m]
80
100
120
Figura 4.2: Partes de una catenaria
denominadas péndolas, situadas longitudinalmente cada cierta distancia. De esta
forma, y mediante la mayor o menor longitud de las péndolas, se consigue mantener
constante la altura del hilo de contacto sobre los raíles.
A la hora de montar estas estructuras es necesario conocer la longitud de las
péndolas antes de ensamblar la catenaria. Aunque se realizan aproximaciones para
minimizar el gasto de material, debido a la inexactitud de los métodos se tiene que
realizar un calibrado manual midiendo cada péndola. Estos tendidos cubren grandes
distancias y el proceso de calibrado supone un gran gasto de tiempo y de dinero.
Como se muestra más adelante, la metodología tratada resuelve el problema con
suciente precisión como para acelerar dicho proceso. Otro problema de especial
interés desde un punto de vista cientíco y tecnológico es la interacción dinámica
entre el pantógrafo y la catenaria. Adquiere gran importancia en las líneas de alta
velocidad ya que, para que el tren funcione con normalidad, es necesario que el
CAPÍTULO 4.
14
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
Figura 4.3: Detalle de la sustentación de una catenaria
pantógrafo no se despegue del cable y que no se produzca una vibración excesiva. Los
métodos actuales para resolver problemas de dinámica del sólido deformable, como
por ejemplo el método de los elementos nitos, pueden tardar entre 8 y 10 horas
en calcular una respuesta de los que entre un
10
y
15 %
de este tiempo se consume
en el cálculo de la conguración de referencia. O. Lopez-Garcia
et al.
utilizaron
una metodología que permitía reducir el tiempo de cálculo de la conguración de
equilibrio incial, tal y como explican en [LGCT06]. Pese a que su modelo da tan
buenos resultados como el mostrado en este trabajo, resulta demasiado rígido para
su aplicación en problemas más generales y de mucho interés como, por ejemplo, el
estudio de la zona de contacto entre un cantón y el siguiente, donde se produce una
leve discontinuidad en la interacción entre la catenaria y el pantógrafo. El modelo
que se presenta en este trabajo, aunque utiliza una idea similar, resulta mucho más
exible y permite resolver los diferentes problemas que presentan las estructuras de
cables, siendo por tanto una ecaz herramienta para el diseño de dichas estructuras.
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
15
4.1.3. Puentes colgantes
Una de las construcciones que más ha impulsado el avance de este tipo de estructuras han sido los puentes colgantes. El primer puente colgante del que se tiene
constancia es el construido en Yunnan, China, alrededor del 65 a.C. (si bien la
identidad de su constructor constituye una incógnita) [Ron78]. En el Imperio del
centro, tanto este puente como los que lo sucedieron se caracterizaban por colgar
suspendidos de cadenas de hierro, algo que aún tardaría siglos en llegar a Europa.
Por su parte, los Incas ya habían comunicado los Andes, antes de la llegada de
Cristóbal Colón, por medio de puentes colgantes. Éstos estaban pensados para el
tránsito a pie en cualquier época del año, y se construían con cuerdas tejidas a base
de una hierba muy común en Sudamérica, el
ichu
(algunos siguen en pie hoy día,
gracias a sucesivas restauraciones efectuadas con las mismas técnicas tradicionales
que emplearon los primitivos artíces)[Wri00].
El diseño de estos puentes, junto a los que se construirían siglos más tarde en
Europa, mejoró con el paso de los años. En estos primeros puentes colgantes el
tablero estaba soportado directamente sobre los cables, por lo que tenía la forma
de una catenaria cuya caída aumentaba conforme la cadena o cable se destensaba.
Se añadían, además, otros cables o cadenas a mayor altura para usarlos a modo de
barandilla (un ejemplo de este tipo de puentes lo se puede encontrar en la gura
4.4).
Más adelante el diseño incorporaría cables secundarios, unidos al principal, que
lograrían mantener la plataforma en posición horizontal. Este esquema mejorado,
que cuenta con una ejemplar representación en el famoso puente sobre la
Gate
Golden
(puerta dorada) de San Francisco, ha perdurado hasta nuestros días.
Se conoce que, ya en el siglo XVII, había puentes hechos con cuerdas Europa.
Muchos de ellos se construyeron con nes bélicos y hay constancia de ello en diversas
crónicas de la época [Dre32]. Se cree que el primer puente europeo hecho con cadenas
se construyó en Inglaterra en 1741. Contaba con 60 m de luz y, al estar destinado al
uso diario de los trabajadores de las minas inglesas, su tosquedad lo situaba a años
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
16
Figura 4.4: Puente sobre el río Min, China
luz del renamiento alcanzado por las estructuras chinas. Por lo demás, en Inglaterra
no se vuelve a tener constancia de la existencia de ningún otro puente construido a
base de cadenas hasta el año 1814. En lo que respecta al continente, la introducción
en él de puentes colgantes de cables contó entre sus pioneros con los señores Sequin
d'Annonay [Dre32], quienes, en 1823 propusieron al gobierno francés un diseño para
la construcción de un puente de grandes dimensiones en Tournon, atravesando el
río Ródano, cuyo boceto es el de la gura 4.5. Empezaron construyendo un modelo
de 19 m de largo y 60 cm de ancho sobre el río
Galore
en
Saint Vallier
para obtener
datos experimentales. El puente se abrió en agosto de 1825.
Figura 4.5: Puente sobre el río Ródano
Tras este breve recorrido histórico por la evolución de los puentes colgantes, cabe
adelantar algunos comentarios relativos a las dicultades y problemas que presentan.
En los puentes colgantes se dan dos tipos de problemas diferentes: el análisis de la
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
17
respuesta no lineal de los cables y el análisis de los pilares. La metodología que se
desarrolla en este trabajo hace posible la resolución estática de ambos problemas, si
bien es preferible el trabajo conjunto con elementos nitos para obtener un análisis
más detallado de las tensiones en los pilares. Gran parte de la rigidez de los puentes
colgantes proviene de la tensión de los cables. Debido a la naturaleza geométrica
de esta rigidez, el sistema modica de forma no lineal sus propiedades frente a
cargas externas. Cuanto mayor es la tensión a la que se está sometida la estructura,
más se puede aproximar a un modelo lineal. Sin embargo, en estructuras menos
rígidas estos modelos responden peor. Este problema es importante estudiarlo, ya
que resulta crítico frente a la respuesta dinámica ocasionada por agentes externos.
4.1.4. Arcos
A través de los siglos, los arcos se han revelado no sólo como un indispensable
elemento estructural en todo tipo de construcciones, sino también como reejo de
la evolución de las técnicas arquitectónicas, a menudo revelando con su forma la
pertenencia de un edicio a uno u otro periodo histórico: el progresivo perfeccionamiento de su diseño ha permitido evolucionar hacia la construcción de edicios
cada vez más esbeltos. Un recorrido por la evolución de los arcos debe comenzar
con la inevitable mención al estilo románico, caracterizado por la omnipresencia
de los arcos de medio punto. El origen de estas estructuras data de los tiempos de
esplendor de la antigua Mesopotamia, pasando con posterioridad a Roma (de donde
procede la particular denominación del estilo románico). Los creadores de las antiguas catedrales románicas infundieron en éstas la capacidad de transmitir quietud y
recogimiento dotándolas de paredes gruesas, compactas y sin apenas ventanas para
poder levantar naves que, a pesar de todo, eran, en comparación, bastante estrechas. Esto era debido en gran parte a la inecacia de los arcos de medio punto que
estaban situados sobre puertas y columnas.
El uso de los arcos apuntados u ojivales se introdujo en la arquitectura de la
mano de los árabes y más adelante surgiría otro tipo de arcos apuntados que sería
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
18
característico del estilo gótico. El uso de este tipo de arcos, además de modicar
estéticamente los edicios, aumentó la ecacia de la estructura, pues, gracias a su
verticalidad, las presiones laterales se reducían considerablemente respecto a las producidas con la utilización del arco de medio punto, permitiendo así salvar mayores
espacios. La evolución, a lo largo de los años, de esa idea que generó la transición
a los arcos apuntados, llevó a considerar la introducción de los arcos con forma de
catenaria en la construcción. Al verse sometida a una fuerza distribuida vertical, la
catenaria, por razones geométricas, tan sólo soporta tensión axial. Aplicando esta
idea a los arcos se obtiene una estructura que sólo se verá sometida a este tipo de
esfuerzos, aumentando considerablemente la altura a la que se pueden elevar las
columnas, así como la resistencia de las mismas.
Utilizando esta idea, y ayudándose por modelos experimentales de cuerdas, Antoni Gaudí diseñó la Sagrada familia en 1883, iglesia que, como es sabido, sigue en
construcción hoy en día.
Figura 4.6: Simulación numérica de una arcada [AGR06]
Con la metodología presentada en este trabajo se podrían reproducir los análisis
realizados por Gaudí e incluso obtener curvas nuevas conociendo unos pocos datos
como, por ejemplo, los puntos máximos deseados o la longitud de los arcos. Una vez
obtenida la geometría podrían introducirse en programas de cálculo de estructuras
para conrmar que el diseño tiene las propiedades deseadas.
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
19
4.1.5. Sistemas de transporte por cables
Al igual que puentes colgantes, ya existían teleféricos hechos con cuerdas en
Sudamérica antes de que fuera descubierta por los europeos. De Ulloa, un escritor
español, describe en su libro Viaje histórico por la américa meridional, tal y como
se cuenta en [Dre32], un tipo de puente llamado tarabita usado para cruzar los
valles de la cordillera de los Andes.
Figura 4.7: Primera página del libro de De Ulloa
Un cable hecho de bambú se enviaba de un lado del valle, donde quedaba atado a un poste, a la otra ladera del valle, donde una polea servía para tensar el
sistema. Elevando un extremo por encima del otro, y utilizando una canasta sucientemente grande para que un hombre se pudiera sentar en ella, era posible cruzar
sin dicultad. Para facilitar el regreso se colocaba otro artilugio similar inclinado en
dirección opuesta. De esta forma a los habitantes de la zona les era posible cruzar
en relativamente poco tiempo la Cordillera de los Andes.
Por otro lado, los teleféricos son sistemas muy utilizados en la actualidad pa-
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
20
ra el transporte de pasajeros. Generalmente se construyen con nes turísticos, ya
que permiten transitar por terreno muy abrupto y en condiciones desfavorables sin
necesidad de instalar una gran cantidad de postes. Esto los hace especialmente interesantes para remontes de alta montaña; de hecho, es uno de los sistemas más
populares en las estaciones de esquí abiertas al público.
Figura 4.8: Foto aérea de un teleférico
Utilizando una conguración de tres cables es posible transportar objetos entre
dos puntos cualesquiera en un área, en lugar de hacerlo entre dos puntos jos, como
ocurre en los funiculares tradicionales. Una de las dicultades que entraña este
método es el control de dicho sistema, ya que la posición del objeto a transportar
depende de las tensiones aplicadas en los dos extremos libres del sistema. Con la
metodología presentada se pueden conocer tanto la posición del objeto conocidas las
tensiones como las tensiones necesarias para transportar el objeto al punto deseado.
4.2. Estructuras de cables planas
Una estructura de cables es plana cuando tiene forma de malla o membrana. Este
tipo de estructuras, debido a su ligereza, cuenta con una rigidez especíca bastante
elevada; como en los casos unidimensionales, gran parte de la rigidez inherente del
sistema viene dada por la tensión de los materiales.
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
21
4.2.1. Cubiertas de edicios
Las primeras estructuras de este tipo, tal y como las se conocen hoy en día,
fueron las cuatro cubiertas de los pabellones construidos por el ingeniero ruso
V.G.Shookhov para una exposición en Nizjny-Novgorod en 1896. Durante los años
treinta algunas cubiertas de tamaño medio se construyeron en Estados Unidos y en
Europa, si bien ninguna gozó de relevancia signicativa. Cuando, en 1950, Matthew
Nowicki diseño la State Fair Arena se dió un gran paso en el desarrollo de este
tipo de cubiertas. Por desgracia, ese mismo año Nowicki murió en un accidente aéreo, pero su trabajo fue continuado por el arquitecto William Henry Deitrick y el
ingeniero Fred Severud, quienes en 1953 completaron el edicio.
Durante una visita a Estados Unidos, un estudiante alemán de arquitectura,
llamado Frei Otto, vio los dibujos del Raleigh Arena en la ocina de Nueva York
de Fred Severud. Otto se dio cuenta de que el proyecto aunaba muchas de sus
mismas ideas para conseguir una construcción con la mínima cantidad de material.
Tras su graduación en 1952, Otto comenzó a investigar sobre cubiertas colgantes.
Su investigación, que fue presentada en su tesis doctoral
Das Hängende Dach
(La
cubierta colgante), se convirtió en el primer documento dedicado exclusivamente a
este tipo de estructuras.
Tras interesarse por el trabajo realizado por Otto, Peter Stromeyer, dueño de
una de las mayores compañías de fabricación de tiendas de campaña del mundo,
contactó con el arquitecto, con lo que comenzó una fructífera relación. En 1957
Otto abrió un centro de investigación sobre construcción de estructuras ligeras en
Berlín para optimizar el proceso. En 1964 añadió dicho centro de investigación al
homónimo de la Universidad de Stuttgart, cuyo trabajo, desarrollado entre los años
1957 y 1965, fue publicado en los dos volúmenes de Tensile Structures [OTS67].
Frei Otto fue el responsable de la construcción y el desarrollo de gran cantidad de
las estructuras tensadas construidas durante los 60 y los 70. Entre ellas, la primera
gran estructura fue la del pabellón de Alemania de la exposición universal de 1967
en Montreal.
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
22
La creciente complicación de este tipo de estructuras ha sido la responsable de
gran parte del desarrollo de las técnicas de cálculo para la obtención de la geometría
de equilibrio durante la etapa de diseño. Estos métodos se han desarrollado desde
mediados del siglo XX cuando la potencia de los ordenadores no era aún comparable a la que existe hoy en día. Por ello, estos métodos suelen ser muy rígidos y
están sujetos a diferentes restricciones con el n de simplicar los cálculos. Con el
procedimiento que se describe en este trabajo es posible estudiar el comportamiento
estático de este tipo de estructuras, tanto las formadas por cables como aquéllas formadas por membranas con rapidez y precisión lo que permitiría diseñar estructuras
aún más complejas.
4.3. Estructuras de cables tridimensionales
Utilizando esta metodología también es posible resolver situaciones en las que
intervengan cables interconectados formando redes tridimensionales de cables. Las
aplicaciones más relevantes de este tipo de disposiciones son las denominadas Estructuras de Tensegridad. Surge así el concepto de tensegridad como principio estructural basado en el uso aislado de componentes en compresión dentro de una red
de componentes en tensión, de forma que los elementos de compresión no se toquen
y los elementos en tensión denan el sistema espacialmente. Estas estructuras son
CAPÍTULO 4.
CLASIFICACIÓN DE LAS ESTRUCTURAS DE CABLES
23
Figura 4.9: Simple estructura de tensegridad
muy utilizadas en arte, ya que la forma que describen una vez completadas son muy
estilizadas. En un ámbito más práctico, este tipo de estructuras establece el comportamiento mecánico de células y moléculas, así como el del ADN [Ing93]. Además,
a nivel molecular, diversos estudios han analizado su utilidad para desentrañar el
movimiento de los organismos unicelulares [CI99].
Parte I
Equilibrio estático de estructuras de
cables
24
25
En esta primera parte se propone un nuevo método para el cálculo de la posición de equilibrio estático de estructuras tridimensionales de cables. Este método
se basa en las ecuaciones analíticas de la catenaria y supone una generalización de
la aplicación previa para el cálculo de equilibrio inicial de catenarias realizado por
el equipo de investigación en mecánica computacional del ICAI coordinado por el
director de este proyecto. En los siguientes capítulos se profundizará en el método
y estarán estructurados de la siguiente manera: En primer lugar se expone una revisión de los principales métodos de cálculo utilizados para su resolución, capítulo
5. A continuación, el capítulo 6 presenta el método teórico propuesto para la resolución de estructuras de cables a partir del desarrollo de las ecuaciones analíticas
de la catenaria. El capítulo 7 presenta diferentes casos que permiten comprobar la
robustez, precisión y exibilidad del modelo teórico y su implementación práctica,
contrastando los resultados con otros publicados en diversas revisas cientícas. El
capítulo 8 muestra una de las aplicaciones prácticas para las que se está empleando
el modelo en la actualidad. Por último, el Capítulo 15 presenta brevemente las conclusiones del trabajo. Las referencias empleadas en el desarrollo del trabajo serán
presentadas en orden alfabético al nal del documento.
Capítulo 5
Métodos de cálculo. Estado del arte
La mecánica de los medios continuos trata de predecir el comportamiento de
los cuerpos cuando sobre ellos actúan fuerzas externas, comportamiento éste que
depende de una serie de parámetros divisos en dos grandes grupos: por un lado, parámetros intrínsecos, basados en las propiedades del cuerpo o sistema que se estudia
(geometría, masa o elasticidad), y, por otro lado, parámetros circunstanciales, que
dependen del estado en que se encuentre el sistema (fuerzas externas, velocidad o
posición). El comportamiento, pues, viene regido por un conjunto de ecuaciones en
derivadas parciales acopladas, que tiene solución analítica en los casos más sencillos.
Sin embargo, cuando se trata de aproximar una realidad más compleja habitualmente se emplean métodos numéricos de integración, como el método de los elementos
nitos, el de las diferencias nitos, métodos espectrales, elementos de contorno, etc.
Utilizando un método numérico es posible encontrar solución al problema de
equilibrio inicial de sistemas de cables. En la mayoría de las estructuras, la conguración de referencia es conocida ya que esta no depende de la distribución de las
tensiones internas. En las estructuras tensadas, como son las formadas por cables,
la conguración inicial depende de las tensiones internas, que son a priori desconocidas, y que deben ser determinadas. La resolución de este problema constituye lo
que se denomina problema de equilibrio inicial y es el paso previo a la obtención
de la respuesta (ya sea estática o dinámica) de una estructura tensada frente a una
26
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
27
acción exterior.
Una manera de clasicar los diferentes métodos de resolución consistiría en la
diferenciación entre los parámetros especicados por el diseñador y los que son
tratados como incógnitas [HA82]. Los parámetros involucrados en un problema de
equilibrio inicial son los siguientes:
La topología de la estructura, que dene las conectividades de los miembros
que la forman.
Las cargas externas. Incluir éstas suele complicar el problema de equilibrio
inicial, ya que la magnitud y la dirección de las cargas pueden depender de la
conguración inicial de referencia
La geometría de la estructura, uno de los dos parámetros clave del problema de
equilibrio inicial, y especialmente importante para calcular las tensiones que
actuarán en la estructura en cada momento: para una estructura en tensión,
la curvatura es el parámetro que más afecta al comportamiento estructural;
La distribución de las fuerzas internas, que se revela como el segundo parámetro clave, pues para conseguir un diseño seguro y económico es fundamental
encontrar una distribución de fuerzas apropiada.
El problema de equilibrio inicial es un problema estático puro, por lo que no
es necesario introducir ecuaciones dinámicas. Sin embargo, algunos métodos, como,
por ejemplo, el método de desplazamiento no lineal, utilizan ecuaciones cinemáticas
para resolver el problema tal y como se comentará posteriormente. Este método en
concreto requiere la especicación de ciertas propiedades del material, si bien dicha
especicación no tiene por qué referirse necesariamente a las propiedades reales:
pueden usarse propiedades cticias para controlar la solución de la conguración de
referencia [HA82].
Como se ha mencionado anteriormente, las cargas externas pueden complicar el
problema de equilibrio inicial, por lo que se suele asumir que los miembros de la
CAPÍTULO 5.
28
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
estructura no tienen peso y que ninguna carga actúa en los nodos. Sin embargo, para
obtener una solución completa, las fuerzas externas estarán presentes en muchas de
las ecuaciones expuestas en este capítulo, aunque normalmente sean despreciadas.
Inicialmente, el único requisito sobre la conguración de referencia es que debe
estar en equilibrio. Considérese un nodo
i en un red de cuatro cables, como se puede
observar en la gura 5.1. Las ecuaciones de equilibrio en las direcciones
x ,y
y
z
en
el nodo se pueden escribir como:
xk − xi
xl − xi
xm − xi
xj − xi
+ Tik
+ Til
+ Tim
+ Fxi = 0,
Lij
Lik
Lil
Lim
yj − yi
yk − yi
yl − yi
ym − yi
Tij
+ Tik
+ Til
+ Tim
+ Fyi = 0,
Lij
Lik
Lil
Lim
zj − zi
zk − zi
zl − zi
zm − zi
Tij
+ Tik
+ Til
+ Tim
+ Fzi = 0,
Lij
Lik
Lil
Lim
Tij
(5.1)
(5.2)
(5.3)
Como el equilibrio inicial es un problema estático, cualquier conguración con
la que se satisfagan las ecuaciones anteriores en cada nodo será una solución del
problema. Dependiendo de cual de los métodos de resolución que se exponen a
continuación se utilice, las incógnitas de estas ecuaciones pueden ser las tensiones, las
longitudes o las posiciones obteniéndose diferentes soluciones. No obstante, algunas
soluciones son mejores ya que no todas responden a la realidad física que se busca.
Figura 5.1: Nodo de una red de cables
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
29
A continuación se describirán los diferentes métodos que han sido utilizados
por diferentes autores para obtener estas soluciones anteriormente. Se realizará un
breve resumen de cada uno de ellos, resaltando a la vez tanto sus ventajas como sus
inconvenientes.
5.1. Método de desplazamientos no lineales
Entre los primeros métodos aplicados en la resolución de problemas de equilibrio inicial cobra especial relevancia el método del desplazamiento no lineal. Éste
se basa en la técnica de los elementos nitos para el análisis del comportamiento estructural con grandes desplazamientos. Con frecuencia, el mismo algoritmo se
aplica en la resolución tanto de problemas de equilibrio inicial como de problemas
en los que aparezcan cargas externas. Sin embargo, este método se ve aquejado de
grandes desventajas ya que es preciso tensar previamente la estructura para aproximarse al equilibrio lo que ralentiza mucho el proceso ya que requiere varios cálculos
consecutivos.
El método de los desplazamientos no lineales se puede resumir de la siguiente
forma: primero, se establece una malla de elementos en equilibrio con una distribución distribución de fuerzas jada por el diseñador. Se crea una forma tridimensional
de la malla desplazando los puntos de soporte de forma casi vertical a partir de sus
posiciones iniciales hasta los puntos en los que estará anclada la estructura, y, por
último, se usa un algoritmo iterativo para obtener la conguración de equilibrio de
la estructura deformada.
5.1.1. Redes de cables
Argyris fue uno de los primeros investigadores en utilizar el método de los desplazamientos no lineales para resolver problemas de equilibrio inicial en redes de
cables, tal como describe en [AAB74]. Su método fue desarrollado para encontrar
la forma de las cubiertas usadas en el estado olímpico de Munich, construido pa-
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
30
ra las olimpiadas de 1972 usando barras para representar los cables en su modelo
numérico.
Barnes detalla en [Bar88] un método similar en el que a una estructura inicialmente desequilibrada se le permite experimentar una vibración amortiguada hasta
estabilizarse en una posición de equilibrio.
Cualquiera de estos métodos permite conocer la geometría en equilibrio del problema. Sin embargo, los desplazamientos en los nodos jos pueden aumentar hasta
que aparezca una distribución de fuerzas desfavorable. Por eso, una vez que los
nodos jos han llegado a sus posiciones nales se realiza un ajuste de fuerzas modicando las longitudes iniciales de los elementos mediante el siguiente procedimiento.
Un elemento tipo barra con un comportamiento elástico que cumpla la ley de Hooke
conserva la longitud total y, por lo tanto, considerando
L0 + ∆L0 = L0 + ∆L0 ,
donde
L0
es la longitud antes del reajuste y
L0
es la obtenida tras el mismo, se
obtiene la relación de la ecuación 5.4.
L0 =
L0 + ∆L0
L0 + ∆L0
=
.
T
1+
1 + AE
(5.4)
Después de este paso de ajuste la estructura ya no está en equilibrio, por lo que
se necesitan algunas iteraciones para establecer el equilibrio nal tanto de longitudes como de fuerzas. El mencionado paso de ajuste modica el valor de las fuerzas
respecto a las establecidas inicialmente. No obstante, dada la levedad de esta variación, se obtendrá una solución en la que la distribución de fuerzas será cercana a
la jada inicialmente. Otra forma de mantener el control sobre las fuerzas es usar
un módulo de elasticidad muy pequeño para los cables a costa de perder el control
sobre la longitud de los mismos.
El método de los desplazamientos no lineales se puede resumir de la siguiente
manera.
Las variables especicadas por el ingeniero son:
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
31
Figura 5.2: Método de los desplazamientos no lineales
•
la topología de la estructura
•
las condiciones de contorno, y
•
las propiedades de los materiales.
Las incógnitas del problema son:
•
la geometría de la estructura, y
•
la distribución de fuerzas internas.
La solución está restringida por la siguiente condición:
•
se debe especicar una distribución de fuerzas inicial.
5.2. El método de la rejilla
Los métodos de resolución de problemas de equilibrio inicial han sido desarrollados para evitar los problemas asociados al método de los desplazamientos no lineales.
Con el n de obtener un problema lineal equivalente muchos de estos métodos imponen ciertas restricciones sobre la solución. En particular, el desarrollo original de
Siev y Eidelmann de 1962, pionero entre estos métodos, permite resolver la posición
de equilibrio inicial de redes de cables asumiendo una condición de ortogonalidad
sobre las mismas.
CAPÍTULO 5.
32
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
Figura 5.3: Red de cables con proyección ortogonal
Su método usa las ecuaciones 5.1-5.3 a las que aplica las restricciones sobre la
geometría, las condiciones de contorno y la distribución de esfuerzos internos de la
red obteniendo como resultado un problema lineal cuya única incógnita es la altura
de cada nodo[SE64]. Siev y Edelmann proponen asumir que la proyección horizontal
del cable es ortogonal; es decir,
una malla de tamaño
xi = xk = xm
y
yi = yj = yl
(véase gura 5.1), con
∆l. Aplicando esta modicación sobre las ecuaciones
5.1- 5.3:
∆l
∆l
+ Til
=0
Lij
Lil
∆l
∆l
Tik
+ Tim
=0
Lik
Lim
Tij
Puesto que
Tij L∆lij
y
Til L∆lil
los cables en la dirección
la dirección
y
x,
(5.5)
(5.6)
son las componentes horizontales de las fuerzas de
y
Tik L∆lik
y
Tim L∆l
im
las componentes horizontales en
y que no se introducen cargas externas en el plano horizontal, se
demuestra que las fuerzas en dicho plano son constantes. Llamando
fuerzas horizontales en el nudo
reescribir las ecuaciones
i en las direcciones x e y
5.3 como sigue:
Hix
y
Hiy
a las
respectivamente, se pueden
CAPÍTULO 5.
33
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
Hix (zj − 2zi + zl ) + Hiy (zk − 2zi + zm ) + Fiz = 0
(5.7)
Si se especican las componentes horizontales, la ecuación 5.7 es lineal y sus
únicas incógnitas son las coordenadas
z
de los nodos libres. La ecuación 5.7 es
la forma discreta de la ecuación de equilibrio vertical de una membrana, como se
demuestra en [TWK59]:
H̃x
donde
H̃x
y
H̃y
δ2z
δ2z
+
H̃
+ F˜z = 0,
y
δx2
δy 2
(5.8)
son las componentes horizontales de la distribución de fuerzas de
tensado (N/m) en las direcciones
x
e
y,
respectivamente, y
F˜z
es la intensidad de
2
carga vertical (N/m ).
El método de la rejilla se puede resumir de la siguiente manera:
Las variables especicadas por el diseñador son:
•
topología estructural, y
•
condiciones de contorno.
Las incógnitas del problema son:
•
geometría de la estructura, y
•
distribución de fuerzas internas.
Las restricciones para la solución del problema son las siguientes:
•
limitado a cables rectos,
•
fuerzas horizontales constantes a lo largo de los cables, y
•
limitado a redes de cables con proyecciones planas rectas.
CAPÍTULO 5.
34
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
5.3. Método de la densidad de fuerza
En la sección 5.2 se ha obtenido una solución del problema de equilibrio inicial
mediante la resolución de un sistema de ecuaciones lineales equivalentes. Sin embargo, debido a las restricciones impuestas sobre los problemas, con el método anterior
sólo se pueden resolver algunos de ellos. El método de la densidad de la fuerza nos
permite abordar aquellos problemas sobre los que no se pueden aplicar todas las
restricciones.
Para obtener el sistema lineal equivalente, este método utiliza el articio matemático, desarrollado en [GB88], que se detalla a continuación. Inicialmente se parte
de las ecuaciones de equilibrio de fuerzas
5.1 5.3 que son no lineales ya que la
longitud de cada elemento es una función de las coordenadas de los nodos. Especicando las fuerzas y las longitudes, a partir de ahora denominadas
q,
en lugar de
especicar las fuerzas de cada elemento las ecuaciones anteriores se ven modicadas
de la siguiente manera:
qij (xj − xi ) + qik (xk − xi ) + qil (xl − xi ) + qim (xm − xi ) = 0
(5.9)
qij (yj − yi ) + qik (yk − yi ) + qil (yl − yi ) + qim (ym − yi ) = 0
(5.10)
qij (zj − zi ) + qik (zk − zi ) + qil (zl − zi ) + qim (zm − zi ) = 0
(5.11)
Con este cambio de variables se ha conseguido obtener un sistema de ecuaciones
lineales cuyo estado de equilibrio tiene la densidad de fuerza indicada en cada elemento sin necesidad de imponer ninguna otra restricción. Este método es apropiado
para obtener una primera aproximación; pero, si se desea estudiar más a fondo la
estructura, es necesario aplicar un análisis posterior como los detallados en las secciones 5.1 y 5.2. La diferencia entre los métodos anteriores es que el método de
los desplazamientos no lineales utiliza un número de ecuaciones igual al número de
grados de libertad, mientras que el número de ecuaciones usado por el método de
la densidad de fuerza es igual al número de restricciones adicionales impuestas, que
en la mayoría de los casos suele ser menor que el número de grados de libertad,
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
35
como se demuestra en [Sch74]. Esta nueva metodología introducida por Schek ha
suscitado, sin embargo, el estudio y desarrollo posterior de este método para su uso
en aplicaciones diversas solventado las dicultades propias del método.
Mollaert aplicó el método de la densidad de fuerza a estructuras compuestas tanto por cables como por elementos rígidos trabajando a compresión como detalla en
[Mol84]. Para obtener la solución fuera del plano de los nodos jos, separó los miembros en tensión de aquellos en compresión cambiando, a continuación, los elementos
substraídos de cada subestructura por fuerzas externas equivalentes diseñando, de
esta forma cada parte por separado.
Asimismo, el método de la densidad de fuerza se usó de forma conjunta con el de
optimización por mínimos cuadrados para generar el patrón de corte de estructuras
compuestas por membranas, tal y como se sugiere en [MT90]. Gracias a la simplicidad de la formulación de este método como la del de optimización por mínimos
cuadrados, se pueden resolver problemas muy complejos en poco tiempo aunque se
usen mallas muy nas.
Estas propiedades hacen que el método de la densidad de fuerza sea preferible
ante otros métodos, como por ejemplo el de la relajación dinámica, a la hora de
obtener estos patrones.
En la formulación de Schek se asume que la directriz de los cables es recta,
lo cual va dejando de ser cierto a medida que la densidad de fuerza de los cables
disminuye. No obstante, en la referencia [HA82] se extiende el método a uno más
general donde esta directriz es curva, además de añadir elementos que reejan la
física de una membrana. Esta ampliación se basa en asumir la matriz de rigidez
geométrica como
KG xg = 0
donde
(5.12)
KG es la matriz de rigidez geométrica de la estructura y xg el vector de coor-
denadas nodales (x,
y
y
z ). La ecuación 5.12 se puede aplicar a cualquier modelo de
elementos nitos estructural y, aunque parece una ecuación de rigidez normal, las
incógnitas son las coordenadas nodales en lugar de sus desplazamientos. Para es-
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
36
tructuras compuestas únicamente por elementos barra, el conjunto de ecuaciones de
5.12 es idéntico al que se obtiene utilizando el método de la densidad de fuerza. Para elementos simples estas matrices se pueden calcular analíticamente; sin embargo,
al implementar muchos otros elementos éstas deben ser calculadas por integración
numérica. Incluso tras conociendo la geometría la determinación de las tensiones en
elementos complejos puede ser problemática.
Christou implementó un elemento catenaria elástica en el método de la densidad
de fuerza, considerando así la carga distribuida por los cables como reeja [Chr96].
Con la matriz de rigidez obtenida se puede resolver la geometría de equilibrio del
problema, tras lo que se requiere un proceso iterativo para hallar la tensión en los
cables la cual esta regida por una ecuación no lineal. No obstante, en estructuras
muy tensas es común despreciar las cargas distribuidas.
Más recientemente, Lai
et al.
han empleado el método de la densidad de fuerza
para diseñar la forma de un reector desplegable con aplicaciones espaciales como
describen en [LYP98]. Para ello, transformaron la membrana original en una red de
cables equivalentes para, de esta forma, utilizar el conjunto de ecuaciones 5.9 - 5.11.
Estos trabajos muestran como el método de la densidad de la fuerza no ha perdido
su vigencia al pasar las décadas, pues, aunque fue introducido hace más de treinta
años, en [LS71], aún hoy surgen nuevas áreas de aplicación.
El método de la densidad de fuerza se puede resumir de la siguiente manera:
Las variables especicadas por el ingeniero son:
•
Topología estructural, y
•
condiciones de contorno.
Las incógnitas del problema son:
•
Geometría de la estructura, y
•
distribución de fuerzas internas.
Las siguientes son las restricciones adicionales del método:
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
•
se encuentra limitado a elementos cable rectos, y
•
la densidad de fuerza ha de estar jada para cada elemento.
37
5.4. Método de determinación de tensiones por mínimos cuadrados
Todos los métodos descritos anteriormente consideran la geometría de la estructura como una incógnita del problema; ahora bien, puede darse el caso de que la
geometría de la estructura sea conocida de antemano. En estas situaciones se debe
determinar la distribución de fuerzas que satisface el sistema de ecuaciones, para lo
cual se presentan dos métodos que derivan de la ecuación:
At=f,
(5.13)
representando 5.13 la forma matricial de las ecuaciones 5.1 - 5.3 se obtiene
Aγ,αβ =
α = x, y, z
donde
β = j, k, l, m
γ = 1, 2, ..., N
αβ −αγ
Lγβ
tγ,α = Tγ,β
f = Fγ,α
siendo
α
los grados de libertad y
minado por
β
los nodos adyacentes al nodo de estudio deno-
γ.
El problema se resuelve diferente manera según la discusión del sistema de ecuaciones 5.13. Si el sistema es incompatible, es decir, que tiene más ecuaciones que
incógnitas, entonces es necesario utilizar un método para buscar la solución que se
aproxime más al equilibrio. Esto se puede hacer empleando el método de los mínimos
cuadrados que se resume en la siguiente expresión.
AT At = AT f,
(5.14)
No obstante es preciso remarcar que con este método tan solo obtiene el equilibrio de la estructura en el sentido de los mínimos cuadrados. Una de sus mayores
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
38
desventajas es que no se tiene ningún control sobre la distribución de fuerzas, no se
pueden restringir las fuerzas de compresión y, además, la distribución de las mismas
puede resultar muy irregular aunque jando algunas de ellas se puede controlar mejor. Frente a estas desventajas cabe señalar un rasgo positivo: la solución se obtiene
con mucha rapidez puesto que viene dada por la resolución de un sistema simétrico
de ecuaciones lineales.
Si, por el contrario, el sistema es compatible indeterminado, con un número
innito de soluciones para obtener el equilibrio, entonces se dene y resuelve una
distribución exacta de tensiones
t*. En general, este sistema de fuerzas no llevará al
equilibrio por lo que las tensiones se pueden expresar como la suma de un conjunto
de fuerzas ideales y de sus respectivas desviaciones del equilibrio,
t = t* + ∆f.
Como las fuerzas ideales se especican directamente,
(5.15)
∆f se convierte en la incóg-
nita del problema. La ecuación 5.13 se puede reescribir como en la ecuación 5.16, y
su solución óptima se dene como el conjunto de desviaciones que tengan la menor
norma euclídea.
A∆t = f − ∆t*.
(5.16)
Recurriendo a una formulación clásica de multiplicadores de Lagrange, como reeja la expresión 5.17, es posible resolver el problema de optimización cuya solución
óptima es la que se escribe de forma explícita en 5.18
∆tT ∆t − 2kT [A∆t − (f − At*)] → mı́n .
−1
∆t = AT AAT
(f − At*) .
(5.17)
(5.18)
Si la geometría de la estructura y la distribución de fuerzas jadas son compatibles la distribución de fuerzas de 5.15 varía muy poco de la especicada. Por ello,
dado que cumple el equilibrio de manera exacta debe obtenerse una solución bastante suave. Sin embargo, en caso de que sean incompatibles, pueden aparecer grandes
CAPÍTULO 5.
MÉTODOS DE CÁLCULO. ESTADO DEL ARTE
39
desviaciones en la fuerzas. Una ventaja del sistema indeterminado con más incógnitas que ecuaciones es que el diseñador tiene algún control sobre la distribución de
fuerzas aunque la geometría se especique de manera exacta. Por el contrario, si el
sistema es indeterminado o hiperestático el procedimiento sólo está compuesto por
matrices simétricas.
El método se puede resumir como sigue:
Las variables especicadas por el ingeniero son:
•
topología de la estructura,
•
condiciones de contorno, y
•
geometría de la estructura.
La incógnita del problema es
•
la distribución de fuerzas internas.
Se concluye aquí la presentación de las técnicas de resolución de estructuras de
cables más empleadas. Junto a estas técnicas existen otros métodos particulares
que permiten resolver multitud de problemas especícos. Algunos de estos métodos
se utilizarán para contrastar los resultados. En el capítulo siguiente se presenta el
desarrollo teórico del modelo propuesto que no puede ser encuadrado en ninguno
de los grupos anteriores ya que todos estos tratan de resolver el equilibrio mediante
la proyección geométrica de las tensiones tal y como muestra la ecuación 5.3. Sin
embargo, el método propuesto obtiene las tensión horizontal y vertical de forma
analítica lo que le permite mayor exibilidad al diseñador de la estructura que
puede jar valores geométricos, topológicos y físicos indistintamente.
Capítulo 6
Desarrollo teórico del método
propuesto
El estudio de las aplicaciones de la sección 3 revela que algunas de éstas, como
pueden ser las líneas de transporte de energía eléctrica, las catenarias de los ferrocarriles o los funiculares, requieren un tratamiento más exacto de su comportamiento.
Por ejemplo, pequeñas desviaciones entre el modelo y la realidad pueden ser muy
relevantes tanto para cálculos estáticos como dinámicos, críticos en el dimensionamiento de las estructuras. Ciertamente todas estas aplicaciones requieren un modelado que responda a su realidad física pero, en algunos casos, las hipótesis que
usualmente realizan los modelos desarrollados en la sección anterior no permiten reproducir el comportamiento real de cada cable. La verosimilitud de estas hipótesis
se apoya en la analogía entre estructuras de cables y estructuras de barras, es decir,
en el tratamiento de estructuras de cables muy tensos como elementos de directriz
recta. Esto es cierto cuando despreciar las cargas distribuidas es plausible.
Aunque algunos de los métodos analizados en la sección 5 utilizan elementos
curvos para modelar los cables, tarde o temprano han de aplicarse ciertas simplicaciones con las que se pierde la precisión necesaria. Otra forma en la que este
tipo de métodos aborda casos en los que la tensión en los cables sea pequeña es
discretizar el cable continuo en elementos rectos más pequeños asimilables a los
40
CAPÍTULO 6.
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
41
eslabones de una cadena. Sin embargo, esto conlleva un considerable aumento del
número de incógnitas que resulta, especialmente crítico para aquellos casos en los
que concurran en grandes desplazamientos.
Este capitulo presenta la formulación analítica de un método de cálculo de estructuras de cables empleando la ecuación exacta de la catenaria. La implementación
de éste método en el lenguaje de programación MATLAB
R
para la resolución de los
distintos casos expuestos más adelante se ha consolidado en una herramienta llamada
CALESCA. En primer lugar se desarrollará en coordenadas locales la ecuación de
la catenaria para más adelante extenderla a un sistema generalizado de coordenadas
globales que, nalmente, serán transformadas a una base tridimensional. Mediante
la correcta manipulación de las mismas se podrá estudiar con precisión la física del
problema de equilibrio inicial.
El cálculo analítico de las tensiones de los cables permite conocer su valor exacto.
Este hecho hace que el método presentado diera de los métodos usados en la actualidad, los cuales emplean proyecciones geométricas de las tensiones de los cables,
consideradas constantes en muchos casos erróneamente. La resolución a partir de un
punto de vista teórico ofrece la posibilidad de obtener de forma precisa la posición
y la tensión de cualquier punto de la estructura, así como la longitud exacta entre
dos puntos de la misma.
6.1. Formulación en coordenadas locales
El comportamiento estático de un cable se rige, como se anticipó en la sección
3, por un conjunto de ecuaciones diferenciales y algebraicas. Para su deducción,
considérese un cable simplemente colgado entre los puntos A y B, tal y como se
muestra en la gura 6.1. El origen de coordenadas de
vertical de
M,
Õηξ
está situado sobre la
siendo éste el punto mínimo de la curva.
Tratando el cable como inextensible, el peso de la porción de cable desde el
punto
M
hasta un punto cualquiera
P
será
ws,
donde
s
es la longitud del cable
CAPÍTULO 6.
42
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
2
B
1
A
2
M
c
1
Õ
Figura 6.1: Sistema de Coordenadas Locales
entre dichos puntos. Esta fuerza actuará sobre el centro de gravedad de la porción
de cable
MP,
la cual será compensada por la tensión del cable en
denominadas, respectivamente,
T
y
H.
Al ser
M
P
y en
el punto mínimo de la curva,
M
H
tan solo tiene componente horizontal. Utilizando el equivalente reducido al centro
de gravedad, se aplican las ecuaciones de equilibrio de fuerzas en los ejes horizontal
y vertical según el diagrama de cuerpo libre de la 6.3, con lo que se obtiene
con lo que, escribiendo
H = wc
T cos ϕ = H
(6.1)
T sin ϕ = ws
(6.2)
y dividiendo 6.1 por 6.2, resulta
s = c tan ϕ
(6.3)
Ésta es la forma intrínseca de la ecuación de la catenaria, en la cual la constante
c
es conocida como la constante de la catenaria. La forma cartesiana de la ecuación 6.3
es
c·
dξ
=s
dη
CAPÍTULO 6.
43
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
y derivando de nuevo se obtiene
2
c·
dξ
ds
=
=
2
dη
dη
1+
dξ
dη
2 ! 21
Integrando esta ecuación resulta
c sinh−1
donde
K1
dξ
= η + K1
dη
es la constante de integración. Dado que el origen de coordenadas está
situado bajo el punto mínimo de la curva, M, en
K1 = 0,
ξ = 0
dξ
dη
= 0,
y por lo tanto
resultando
dξ
η
= sinh
dη
c
(6.4)
Integrando de nuevo se obtiene
ξ = c cosh
donde
que
K2
η
+ K2
c
es otra constante de integración. Si en el punto
K2 = 0,
η = 0, ξ = c,
se deduce
y por lo tanto
ξ = c cosh
η
c
(6.5)
que es la ecuación cartesiana de la catenaria respecto del sistema
Õηξ .
A partir
de las ecuaciones 6.3 y 6.4 se obtiene que la longitud de arco de cable es
s = c sinh
η
c
(6.6)
La tensión del cable se obtiene por la suma de cuadrados de las ecuaciones 6.1
y 6.2, con lo que se obtiene
T 2 = w 2 s2 + c 2
de lo que, utilizando 6.5 y 6.6, se deduce
T = wξ
y, por lo tanto,
T = wc cosh
η
c
(6.7)
CAPÍTULO 6.
44
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
Éstas son las ecuaciones básicas de la catenaria, que se pueden encontrar en
diferentes libros de mecánica clásica, así como en parte de la bibliografía referente
al estudio de estructuras de cables [Pug68, Irv81].
6.2. Formulación en coordenadas globales
Las ecuaciones anteriores son útiles en el caso de estudiar un único cable. Pero si
se trata de estudiar varios cables, es necesario obtener las ecuaciones en un sistema
más general que el empleado anteriormente. Para ello se de ha desarrollado una
metodología similar a la empleada en [Cel06], que será generalizada más adelante
para estructuras más complejas.
2
x2
B
xm i n
x1
1
A
2
y2
M
y1
c
1
Õ
O
Figura 6.2: Relación entre coordenadas locales y globales
Para ello, considerando el sistema
Oxy
se aplica la ecuación 6.5 a los extremos,
los cuales aparecen en la gura 6.2, de lo que resulta:
ξ2 = c cosh
x2 − xmin
c
(6.8)
ξ1 = c cosh
xmin − x1
c
(6.9)
y
CAPÍTULO 6.
45
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
Aplicando la ecuación 6.6 a los mismos puntos se obtiene:
s2 = c sinh
x2 − xmin
c
(6.10)
s1 = c sinh
xmin − x1
c
(6.11)
y
Restando 6.8 de 6.9:
ξ2 − ξ1 = y2 − y1 = c cosh
xmin − x1
x2 − xmin
− c cosh
c
c
(6.12)
Sumando 6.10 de 6.11:
l = c sinh
x2 − xmin
xmin − x1
+ c sinh
c
c
(6.13)
Aplicando la siguiente identidad hiperbólica a 6.12
cosh a − cosh b = 2 sinh
1
1
(a + b) · sinh (a − b)
2
2
(6.14)
se obtiene:
y2 − y1 = 2c · sinh
Despejando
xmin
x2 − x1
2c
sinh
x1 + x2 xmin
−
2c
c
(6.15)
de 6.15 se obtiene:
xmin
x1 + x2
=
− c · asinh
2
y2 − y1
−x1
2c sinh x22c
!
(6.16)
Se puede apreciar que el mínimo de la curva depende exclusivamente de la posición de los extremos y de la constante. Suponiendo que éstos son conocidos, puede
deducirse fácilmente la tensión vertical y horizontal en los extremos utilizando un
sistema de coordenadas locales como el presentado en la sección 6.1. El diagrama
de cuerpo libre de la gura 6.3 representa un cable desde el punto mínimo hasta
uno de sus extremos en un sistema de coordenadas local
Õηξ .
Aplicando un balance de fuerzas en la dirección horizontal se obtiene:
CAPÍTULO 6.
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
46
Figura 6.3: Diagrama de cuerpo libre
Th = T cos θ
Sustituyendo en 6.17
T
por su valor, hallado en
Th = wc cosh
En el punto mínimo
(6.17)
η = 0, cosh
η
c
=1
6.7, se obtiene
η
cos θ
c
y
(6.18)
cos θ = 1;
por lo tanto
Th = wc
(6.19)
Esta tensión horizontal permanece constante a lo largo de todo el cable, ya que
no hay ninguna otra fuerza externa horizontal. La componente vertical de la tensión
en los extremos puede hallarse compensando las fuerzas verticales:
Tv = T sinθ = ws
Sustituyendo en 6.20
s
por su valor, hallado en
Tv = wc sinh
η c
(6.20)
6.6, resulta
(6.21)
Dada la posición de los extremos del cable, y, por tanto, siendo conocidas la
distancia horizontal,
d,
y vertical,
v,
entre sus extremos el estado de dicho cable
CAPÍTULO 6.
47
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
queda denido por las variables
c, l
y
T.
Asimismo se pueden utilizar las ecuacio-
nes 6.7 y 6.13 para que, dada una de ellas, puedan calcularse las otras dos. La forma
explícita y adimensionalizada de éstas referida al primer extremo es:
El (c, l) =
x2 − xmin
xmin − x1
l
− sinh
− c sinh
=0
c
c
c
Ec (c, T ) =
T
xmin − x1
− c cosh
=0
w
c
(6.22)
(6.23)
De añadirse otro cable quedaría perdida la información de la posición de uno de
los extremos, con lo que aparecerían tres nuevas incógnitas. Éstas serían resueltas
con las tres ecuaciones de balance de fuerzas en dichos puntos. Por lo tanto, para
todo sistema bien denido, existirá un número nito de soluciones.
6.2.1. Consideraciones sobre el cable elástico
Si se considera la elasticidad de los materiales, la longitud nal del cable,
lf ,
dependerá de la tensión del cable y de las propiedades del mismo. La ley de Hook
en su forma integral es
Z
∆l =
L
T (x)
ds
EA
y, sustituyendo en ella la tensión obtenida en la ecuación 6.7, se obtiene
wc
∆L =
2EA
c
2 (xmin − x1 )
2 (x2 − xmin )
senh
+ senh
+ (x2 − x1 )
2
c
c
Por lo tanto, la longitud real del cable para cada estado de carga sería
Lf inal = Lreposo + ∆L
Al ser muy pequeño este incremento de longitud, la variación del peso por unidad
de longitud se puede considerar constante,
wLreposo ≈ wLf inal .
Ésta sería la formulación completa para un solo cable perfectamente exible o
para una cadena sin rozamiento colgada entre dos puntos. Un sistema más complejo
estaría compuesto de más elementos interconectados en nodos. Para resolver este
CAPÍTULO 6.
48
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
tipo de estructuras es necesario la generalización de este método a un sistema de
referencia tridimensional.
6.3. Generalización a 3D
Tal y como formuló Newton, las fuerzas en cualquier punto de un sistema mecánico en reposo deben estar equilibradas. Por ello, en cada nodo de unión de dos
o más cables las fuerzas deben equilibrarse simultáneamente. Para aplicar las ecuaciones de equilibrio, estas tensiones deben descomponerse en un sistema de ejes
ortogonales. Ya que la única fuerza distribuida aplicada sobre el cable es la gravedad, y solo está contenida en el plano vertical, las tensiones de los mismos también
pertenecen al plano vertical que pasa por los extremos. En el sistema local para
un cable contenido en un plano, la tensión en los extremos se puede dividir en
y
Tv .
Para aplicar una matriz de transformación ortogonal se denominará
Tp
Th
a la
tensión que aparecería en el plano perpendicular al que une los extremos del cable
que siempre será
dirección
Tp = 0.
Utilizando la matriz de giro alrededor de un eje en la
z,
√ ∆x
∆y 2 −∆x2
∆y
T =
√∆y2 −∆x2
0
−√
∆y
∆y 2 −∆x2
√ ∆x
∆y 2 −∆x2
0
0
0
1
es posible obtener las tensiones en el sistema global de coordenadas a partir de las
expresiones deducidas en la sección anterior. Estas tensiones tan sólo dependen de
las posiciones relativas de los extremos del cable, la densidad lineal,
de la catenaria,
c. Tv
correspondería a la componente en el eje
z
w, y la constante
de la tensión y
Th
estará en el plano horizontal en la dirección que une a los extremos, o lo que es lo
mismo:
CAPÍTULO 6.
49
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
√
∆x
∆y 2 −∆x2
T
x
√ ∆y
Ty =
∆y2 −∆x2
Tz
0
−√
√
∆y
∆y 2 −∆x2
∆x
∆y 2 −∆x2
0
0
Th
0
Tp
Tv
1
(6.24)
Gracias a ello es sencillo descomponer las fuerzas de cada nudos en sus componentes verticales y horizontales para obteniendo las siguientes ecuaciones de equilibrio
estático:
X
Donde
T = (Tx , Ty , Tz )T
y
T + Fp = 0
(6.25)
Fp = (Fpx , Fpy , Fpz )T . Estas ecuaciones se pueden aplicar
a cada nodo, siempre que todas las fuerzas que conuyen en el sean incógnitas. Si
algún nodo es de contorno las reacciones (fuerzas exteriores) serán incógnitas.
6.4. Ensamblado y resolución
Una vez conocidas las ecuaciones que denen la física del problema, se dene un
sistema de ecuaciones no lineales de la siguiente forma.
G (x) = 0
donde
G = (G1 , G2 , ..., Gn )
x = (x1 , x2 , ..., xn )
Dependiendo del tipo de problema las funciones objetivo,
(6.26)
Gi ,
pueden ser de
dos tipos: de equilibrio o de compatibilidad. Las primeras responden al equilibrio
estático en los tres grados de libertad (ecuación 6.25). Las otras, más especícas de
este tipo de estructuras, ajustan la compatibilidad entre la forma, la longitud y la
tensión. La forma de la catenaria se rige por el valor de la constante de la catenaria,
c,
fundamental para conocer la longitud y la tensión en el cable, relacionadas por
las ecuaciones 6.22 y 6.23.
Por otro lado, en el vector
incógnitas: posiciones nodales,
catenaria,
c,
x
(cuadro 6.1) pueden diferenciarse dos tipos de
(xi , yi , zi ), y propiedades del cable, la constante de la
la longitud del cable,
l
y la tensión del cable,
T.
Para que el problema
esté correctamente denido, deben denirse tantas incógnitas como ecuaciones. En
CAPÍTULO 6.
50
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
cada nudo interno existen tres ecuaciones de equilibrio, una en cada dirección; en
cada nodo de contorno en los que se desee conocer o utilizar las reacciones también
aparecerán tres ecuaciones de equilibrio; y por cada cable se deberán cumplir dos
ecuaciones de compatibilidad más. Por otro lado, el número de incógnitas será el
mismo ya que: en cada nudo interno se deseará conocer su localización geométrica; en
cada nudo de contorno se calcularán las reacciones respecto a los ejes coordenados;
y en cada cable se podrán averiguar dos de las tres propiedades características:
l
y
T.
c,
Esta sería la disposición más simple ya que, sin modicar la cantidad de
ecuaciones y de incógnitas, es posible aportar información adicional como podría
ser alguna coordenada nodal pudiendo conocer así más información sobre los cables.
A modo de resumen se muestra la siguiente tabla:
Nudos internos
P
Ecuaciones
Nudos de contorno
F̄i = 0
xi , yi , zi
Incógnitas
P
Cables
F̄i = 0
ext
, Fyiext , Fziext
Fxi
Ec, El
Dos entre
c, l, T
Tabla 6.1: Ensamblado del sistema de ecuaciones
Sirva como ejemplo la estructura que se muestra en la gura 6.4. Ésta esta
compuesta por los cables 1, 2 y 3 de longitudes conocidas conectados en el nodo
en el que se aplica una fuerza externa,
1
Fp = (Fpx , Fpy , Fpz )T .
Figura 6.4: Simple estructura de cables
Además del nodo
1
hay otros tres nodos que pertenecen al contorno y por lo
tanto no formarán parte de las incógnitas ya que no se desea conocer las reacciones
CAPÍTULO 6.
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
51
en los soportes. Las incógnitas que presenta este problema son las constantes de los
cables
c1 , c2
x1 , y1
y
z1
y
c3 , las coordenadas de la posición de equilibrio del nodo de conexión,
y la tensión,
T1 , T2
y
T3 ,
en uno de los extremos de cada cable. Por lo
tanto, resultan un total de 9 incógnitas en el problema.
En cada cable hay denidas dos ecuaciones que equilibran la constante de la
catenaria con la tensión y la longitud. Estas ecuaciones son
en la expresión 6.23, y
El1 , El2
y
El3 ,
Ec1 , Ec2 y Ec3 , denidas
según la ecuación 6.23. En el nodo interno
se aplicarán las tres ecuaciones de equilibrio de fuerzas tal y como se muestra en la
ecuación 6.25 cuyos valores se obtienen a partir de ecuación 6.24.
La necesidad de sistematizar este tipo de cálculos de cara a su implementación
precisa recurrir a la expresión matricial de las ecuaciones que rigen el comportamiento de cada cable. Así se obtiene una matriz por cada elemento que posteriormente
se ensamblarán en un único sistema global de la forma 6.26. Para ello se debe relacionar las ecuaciones nodales de cada cable con las ecuaciones correspondientes
en el sistema global y añadir las fuerzas internas calculadas para dicho nudo. Por
último se sumarían las fuerzas externas que actúen sobre el mismo obteniendo el
primer tipo de funciones objetivo. Las de segundo tipo se obtienen directamente de
cada cable ya que sólo dependen de la posición de sus extremos.
El sistema de ecuaciones que resulta está compuesto por un conjunto de ecuaciones no lineales, para cuya resolución existe una gran cantidad de métodos. Dada
la gran variedad de problemas que es posible resolver, en algunos de ellos la no
linealidad puede resultar crítica. Para abordar los diferentes casos que se presentan en este trabajo se han empleado las dos familias de métodos que se detallan a
continuación. Ambas familias tratan de resolver un problema no lineal de mínimos
cuadrados, el cual consiste en la búsqueda de un mínimo global a la suma de los
cuadrados de las
n
funciones objetivo; es decir,
n
1X 2
G (x)
minimizar G (x) =
2 i=1 i
donde
x ∈ <n
Este problema surge de la dicultad de encontrar una solución al sistema de
CAPÍTULO 6.
52
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
ecuaciones no lineales y, en consecuencia, tratar de encontrar una pseudosolución
que mejor la aproxime de acuerdo con la norma euclídea.
6.4.1. Referencias teóricas del problema
La familia de métodos que se van a emplear para resolver los problemas de
mínimos cuadrados requieren la información que proporcionan las derivadas de las
componentes
Gi (x)
del vector
G (x)
respecto a cada una de las variables
xk .
En
el problema que nos ocupa, esas derivadas existen, como mínimo hasta segundo
orden, siendo además continuas y con posibilidad de obtenerse de forma analítica.
La matriz Jacobiana de
componente
Gi (x)
por
Ji (x)k =
G (x)
se denota por
Hi (x) ∈ <n×n ,
∂Gi (x)
;
∂xk
Hi (x)jk =
n
X
y la Hessiana de cada
donde
Las derivadas primera y segunda de
∇G (x) =
J (x) ∈ <n×n
f (x)
∂ 2 Gi (x)
,
∂xj xk
i = 1, ..., m
son:
Gi (x) ∇Gi (x) = J (x)T Gi (x)
i=1
y
∇
2
G (x) =
n
X
∇Gi (x) ∇Gi (x) + Gi (x) ∇2 Gi (x) = J (x)T J (x) + Q (x)
i=1
donde,
Q (x) =
n
X
Gi (x) Hi (x)
i=1
6.4.2. Familia de métodos Gauss-Newton
El primer enfoque utiliza para resolver el problema de mínimos cuadrados no
lineal el modelo lineal del sistema que dene el desarrollo en serie de Taylor alrededor
de un punto
xk
truncándolo a partir de los términos de segundo orden; es decir,
Mk (x) = G (xk ) + J (xk ) (x − xk )
CAPÍTULO 6.
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
Paso 0
Denir un
Paso 1
Determinar
Paso 2
Si
x0 :
hacer k=1 y
xk ← x0
mı́nx∈<n kG (xk ) + J (xk ) (x − xk )k2
(x − xk ) < Tol,
si no, hacer
53
parar: el problema está resuelto;
k = k + 1, xk = x
e ir al paso 1.
Tabla 6.2: Algoritmo de Gauss-Newton
El método de Gauss-Newton para resolver problemas no lineales de mínimos
cuadrados está basado en la resolución de una sucesión de aproximaciones lineales
de
G (x) de acuerdo con el algoritmo del cuadro 6.2.
Cada uno de los subproblemas del paso 1 es un problema lineal de mínimos
cuadrados del tipo
minimizar
kAx − bAk2
x ∈ <n
donde
La solución de esos subproblemas,la cual será una dirección de descenso, está dada
por
dk = (x − xk ) = −J (x)T
G (x)
Al obtener analíticamente el sistema de ecuaciones
6.26, es posible calcular de
manera exacta este jacobiano. Gracias a ello la convergencia es óptima para cada
método y reduce sensiblemente los tiempos de resolución gracias a la minimización
del número de llamadas a las funciones.
6.4.2.1. Line Search
Line Search
es un método de búsqueda utilizado dentro de algoritmos mayores.
En cada paso de la iteración, el método de
que contiene al punto actual,
xk ,
line-search
busca a lo largo de la línea
paralelo a la dirección de búsqueda, que es el
vector determinado en el algoritmo principal. De esta forma, el siguiente paso de la
iteración queda de la forma:
xk+1 = xk + α · dk
CAPÍTULO 6.
en el que
54
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
α es la longitud del paso. El método intenta minimizar la función objetivo
a lo largo de la línea
xk + αdk . Para conseguir esto existen dos criterios:
1. Escoger el mayor
α
de la sucesión
1, 21 , 41 , ...,
para el cual
1
kGi (xk )k22 − kGi (xk + αdk )k22 ≥ α kJ (xk ) dk k22
2
A este criterio se le llama
2. Escoger el
α
Regla de Armijo
solución de
minimizar kGi
(xk − αdk )k22
donde
α ∈ <n
Como los dos criterios funcionan adecuadamente, en la literatura se aconseja
indistintamente utilizar uno u otro. Incluso se pueden combinar los dos en algún
caso según progresa el procedimiento correspondiente. Se puede encontrar más información sobre este tipo de algoritmos en [OC97], [nNW99] o en [Fle87].
6.4.3. Familia de métodos de región de conanza
En caso de que la matriz jacobiana
J (xk )
sea singular, el método de Newton
no encuentra solución al sistema, ya que el paso
dk
no está denido. Además, si
el sistema de ecuaciones es muy grande, puede ser difícil de calcular dicho paso.
También es posible que no se encuentre solución si el valor inicial del sistema está
muy alejado de ésta. Usando técnicas de región de conanza se aumenta la robustez
de la optimización si los valores iniciales están lejos de la solución e incluso soporta
que el jacobiano,
J (xk ),
sea singular.
Este tipo de técnicas están basadas en un concepto simple pero muy potente
en el área de la optimización. Considérese el siguiente problema de minimización
incondicional: minimizar
G
G (xk ),
en el que
en los alrededores de un punto
función más simple
q
x0 ,
G : <n → <.
Si se desea optimizar en
la idea es aproximar la función
que reeje el comportamiento de
G
G
por una
en el entorno,
N,
de
CAPÍTULO 6.
xk .
55
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
Este entorno es la región de conanza. Se calcula un paso,
minimizando aproximadamente)
q (s)
en
N.
s,
minimizando (o
El subproblema de minimización sería:
mı́n {q (s) s ∈ N}
(6.27)
s
El punto se actualizaría para ser
x+s
si
G (xk + s) < G((xk );
en caso contrario
el punto se mantendría sin modicación y la región de conanza,
N
disminuiría y
se repetiría el cálculo anterior.
Los puntos clave del método son cómo elegir y calcular una aproximación
G
en el entorno de
q
de
xk , cómo elegir y modicar la región de conanza, N ; y cómo
resolver el subproblema
6.27 con precisión.
El método de región de conanza estándar, aproxima
Taylor de segundo orden en el entorno de
G
por su desarrollo de
xk ; es decir, en la región de conanza, N,
que normalmente es de forma esférica o elipsoidal. Matemáticamente el problema
se suele formular de la siguiente forma:
mı́n
donde
∇G
1 T
s Hs + sT ∇G tal
2
es el gradiente de
matriz diagonal de escala,
G
en el punto
que kDs k ≤ ∆
(6.28)
xk , H es la matriz Hessiana, D es la
k·k es una norma y ∆ el tamaño de la región de conanza,
N. Existen buenos algoritmos para resolver la ecuación 6.28 [MS83]. No obstante,
para cierto tipo de problemas resolver esta ecuación lleva demasiado tiempo y, por
lo tanto, sería preferible usar un método tipo Newton.
El método se podría resumir de la siguiente maneras:
Paso 0
Formular el subproblema de región de conanza.
Paso 1
Resolver la ecuación
Paso 2
Si
Paso 3
Ajustar
6.28 para determinar el paso
G ((xk + s) ≤ G (xk )),
s.
xk = xk + s .
∆.
Tabla 6.3: Algoritmo de la región de conanza
Estos cuatro pasos se repiten hasta que el problema converge. La dimensión de
la región de conanza se ajusta según reglas estándar. En particular, se disminuye si
CAPÍTULO 6.
DESARROLLO TEÓRICO DEL MÉTODO PROPUESTO
el paso no es aceptable; es decir, cuando
56
G ((xk + s) > G (xk )). Para más referencias
se pueden consultar los siguiente artículos [CV01] o [Sor97] que desarrollan el tema
con más profundidad.
Capítulo 7
Vericación de la implementación del
modelo
Habiendo concluido la formulación y generalización del método propuesto para
la resolución de la estática de estructuras de cables, este capítulo pretende llevar a
cabo una validación exhaustiva según dos vertientes claramente diferenciadas. La
primera de ellas abordará la validación numérica del método propuesto respecto a
otros recogidos en la literatura cientíca relativa al tema que ocupa este trabajo.
Por otra parte, la exibilidad y robustez del método ha de ser igualmente vericada
mediante la aplicación a distintos problemas de muy diversas áreas empleando una
metodología común a todos, como es la expuesta en este trabajo.
7.1. Contrastación con el método de elementos nitos (MEF)
Como primer caso susceptible de validación el método propuesto en este trabajo
se ha contrastado con una formulación clásica de elementos nitos mediante la
resolución de un ejemplo sencillo. Hasta el momento el MEF es reconocido como
uno de los métodos más potentes para resolver este tipo de problemas debido a que,
gracias a su exibilidad, resulta sencillo la sistematización y resolución de muchos
57
CAPÍTULO 7.
58
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
problemas. Sin embargo, debido a que para obtener una precisión aceptable se debe
aumentar la densidad del mallado, los tiempos de cálculo requeridos para resolver
problemas relativamente sencillos crecen considerablemente.
El caso que se va a analizar es un cable soportado en un extremo y al que se
le aplica una fuerza de tensado horizontal en el otro extremo como se ve en la
gura 7.1. Además de la gravedad, en el punto medio del cable se aplica una fuerza
transversal,que sacará el cable de su plano de
100N .
100 N
0
-2
Eje z
-4
-6
0
-8
-10
-2
-12
-14
0
-4
100 N
5
-6
10
15
Eje x
20
25
Eje y
-8
Figura 7.1: Validación con MEF
Para un problema tan simple, el tiempo de cálculo para la herramienta que se
ha desarrollado es de alrededor de un segundo. El tiempo requerido para resolver
este problema utilizando el modelo de elementos nitos depende críticamente del
número de elementos que se haya utilizado. Hay que tener en cuenta que, mientras
que la metodología que introduce este trabajo tan solo utiliza un elemento por cable,
el MEF utiliza un conjunto de elementos tipo barra enlazados en los extremos.
CAPÍTULO 7.
59
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
Debido a la geometría, este caso es no lineal y puede producir graves problemas
de convergencia si las cargas no se aplican en el orden adecuado. Para obtener la
solución por elementos nitos fue necesario aplicar la tensión horizontal en primer
lugar y, una vez calculada la posición de equilibrio, introducir la gravedad y la fuerza
transversal.
Para realizar las simulaciones se ha utilizado una masa por unidad de longitud
w = 1,34kg/m,
de
un área transversal de
E = 2,1 · 1011 N/m2
A = 2 · 10−4 m2
y un módulo de elasticidad
Para comprobar la importancia del número de elementos se
ha realizado el mismo estudio con 20, 50 y 150 elementos por cable para, de esta
manera, comprobar si los resultados convergen a la misma solución de equilibrio.
Nodo 1
Nodo 2
x
y
z
x
y
z
Obtenidos
12.1003
-13.2282
6.05015
24.2006
0
0
MEF (20e)
12.1008
-13.233
6.0505
24.202
0
0
0.0042
0.0360
0.0058
0.0058
0
0
12.1004
-13.229
6.0502
24.201
0
0
0.0009
0.0058
0.0009
0.0017
0
0
MEF (150e)
12.1003
-13.228
6.0501
24.201
0
0
∆%
4.3538 10
0.0018
0.0008
0.0017
0
0
∆%
MEF (50e)
∆%
−5
Tabla 7.1: Comparación de resultados (Caso I)
Se puede comprobar que conforme aumenta el número de elementos en la malla de elementos nitos, la solución tiende a la solución obtenida con el método
propuesto obteniéndose diferencias muy pequeñas ya con 50 elementos.
7.2. Simulación de sistema de transporte triangular
El TRS (Triangular
Skyline System )
es un sistema mediante el cual se pueden
transportar elementos en una zona de terreno sin dañar otros objetos que se en-
CAPÍTULO 7.
60
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
cuentren en el camino. El sistema está compuesto por tres cables suspendidos desde
tres torres y conectados en un punto móvil del que podrá colgar una carga. Su principal utilidad es el traslado de objetos en áreas forestales o de alto valor ecológico.
Utilizando este sistema, se podría realizar una tala controlada de un área de bosque
sin dañar, tan solo, aquellos árboles que se deseen. El desplazamiento de la carga se
ceñirá al área triangular formada por las bases de las torres de la que cuelgan los
cables.
Figura 7.2: Esquema de la disposición del sistema de transporte triangular
En 1972, Kanzaki y Sakai presentaron un primer análisis estático en [KS72].
Su desarrollo no tenía en cuenta la deformación elástica de los cables y además
no se pudieron obtener resultados para algunas de las posiciones de los cables. No
obstante, presentaron datos contrastados que se utilizarán para vericar el correcto
funcionamiento del método propuesto en este trabajo.
El problema se modela como 3 cables de longitud desconocida y tensión conocida anclados en los puntos
(15, 680, 771).
P 1 = (260, 210, 786), P 2 = (320, 685, 790)
y
P3 =
Para contrastar correctamente los resultados con el modelo de refe-
rencia, no se tiene en cuenta la deformación elástica de los cables, si bien, ya que
las tensiones son relativamente pequeñas, se pueden despreciar para cables con un
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
61
modulo de elasticidad medio. El peso por unidad de longitud de los cables es de
w = 0,1N/m
y el peso de la carga es de
Tension [N]
Posición[m]
Longitud[m]
W = 100N .
Kanzaki
Obtenidos
∆%
T1
3200
3200
-
T2
2994
2994
-
T3
4069
4069
-
x
145,5
145,5
0
y
610,3
610,29
0,013
z
751,6
751,58
0,003
s1
418
418,06
0,06
s2
193,7
193,7
0,0048
s3
149,3
149,23
0,069
Tabla 7.2: Comparación de resultados (caso II.a)
Como se puede observar las diferencia,
∆,
respecto a los resultados publicados
anteriormente son mínimos. Con el método que se ha desarrollado es posible resolver
otro tipo de problemas asociados. Por ejemplo se puede jar una tensión y el punto
del plano al que debe desplazarse el carro. En el cuadro 7.3 se muestran los resultados
al resolver de nuevo el problema utilizando
T3 , x
e
y
como datos.
Se puede comprobar como los resultados son prácticamente idénticos a los calculados en el caso anterior, así como a los resultados publicados anteriormente en
[KS72]. Además se ha comprobado la exibilidad que ofrece esta metodología ya
que permite jar aquellos parámetros que sean más convenientes para el diseño sin
necesidad de desarrollar una nueva metodología. Por otro lado la robustez del método queda patente al resolver de forma adecuada diferentes problema en distintos
tipos de variables.
CAPÍTULO 7.
62
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
Tension[N]
Posición[m]
Longitud[m]
Kanzaki
Obtenidos
∆%
T1
3200
3199,9
0,003
T2
2994
2994,1
0,002
T3
4069
4069
-
x
145,5
145,5
-
y
610,3
610,29
-
z
751,6
751,58
0,003
s1
418
418,06
0,060
s2
193,7
193,7
0,005
s3
149,3
149,23
0,069
Tabla 7.3: Comparación de resultados (Caso II.b)
7.3. Comparación de un sistema de cables en 3D
Este ejemplo contrasta los resultados obtenidos al analizar una estructura de
cables tridimensional con los encontrados en [HL06]. Se trata de una estructura
sencilla que consta de tres cables unidos en un punto en el que están soportados
por un muelle vertical. En el punto de unión se aplica adicionalmente una carga de
1000N
en el plano horizontal. Los resultados publicados anteriormente presentan el
desplazamiento del punto de unión a partir de un punto arbitrario inicial. Con el
método presentado es posible conocer la posición de equilibrio todos los puntos de
la estructura, además de la del punto de unión.
En la gura 7.3 se puede ver un esquema de la estructura en la que se aprecian
los cables 1, 2 y 3 unidos en el punto A' de equilibrio. También está señalado el
punto inicial A.
En el cuadro 7.4 se presentan los resultados para los desplazamientos
desde el punto arbitrario
A
al de equilibrio
A0
con las diferencias,
∆,
u ,v
y
w
respecto a los
resultados en [HL06].
Se puede ver como las diferencias son del mismo orden o menores que las ob-
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
63
Figura 7.3: Situación inicial y nal de la estructura
tenidas en las comparativas anteriores. El método utilizado por Huang y Lan fue
contrastado con los resultados obtenidos por Peyrot y Goulois y que ha sido referenciado más de 20 veces. Éstos utilizaron un método similar para resolver la posición
de equilibrio de la estructura y, por lo tanto, obtienen resultados del mismo orden.
Peyrot y Goulois publican resultados de las tensiones horizontales y verticales de
un cable colgado dependiendo de su tensión. Para comprobar las diferencias entre
los métodos se ha contrastado con estos resultados que aparecen en [PG79] y que
se muestran en la gura 7.4.
A partir de los resultados presentados en el cuadro se observa como las diferencias
se mantienen pequeñas sea cual sea la tensión de los cables. No obstante, crece
lentamente conforme aumenta la tensión en los mismos. Esto puede ser debido al
método con el que se calcula la deformación elástica. En la mayoría de los casos, se
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
∆
[HL06]
Propuesto
u
26.47
26.527
0.2146
v
41.14
41.105
0.0860
w
-2.87
-2.8833
0.4632
64
( %)
Tabla 7.4: Desviación del punto de equilibrio
60 m
19:945 N
19:225 N
15:744 N
9:178 N
504:43 N
22:16 N
{329:08 N
3:0625 N
20 m
40 m
60 m
80 m
Figura 7.4: Cálculo del equilibrio de un cable
supone una tensión constante a lo largo del cable para calcular la deformación, sin
embargo en el método que se presenta la deformación elástica se calcula utilizando
la tensión en cada punto.
7.4. Comparativa de cálculo de rigidez de una catenaria ferroviaria
El cálculo de la rigidez estática de una catenaria es una aplicación de gran interés
en ingeniería ferroviaria. A día de hoy la Especicación Técnica de Interoperabilidad
para catenarias hace referencia al cálculo de esta rigidez ya que es bastante fácil
obtener de forma aproximada en comparación con un cálculo dinámico.
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
Propuesto
Peyrot y
Goulois
Tx
Ty
Tx
Ty
∆x ( %)
∆y ( %)
3.0625
19.945
3.061
19.93
-0.0144387
0.00992054
9.178
19.225
9.172
19.24
0.000950228
0.0105126
22.16
15.744
22.15
15.73
-0.0180386
0.0269166
504.43
-329.08
504
-328.8
0.085245
-0.085086
65
Tabla 7.5: Comparación con los resultados de Peyrot
Este cálculo tiene un fundamento completamente estático. La rigidez se dene
como la relación entre la fuerza aplicada en un punto y el desplazamiento en dicho
punto debido a ésta. Utilizando esta denición es posible obtener un modelo simplicado masa-muelle para realizas cálculos dinámicos aproximados como se explica
en [LGCM07].
1.6
1.4
1.2
Altura [m]
1
0.8
0.6
0.4
0.2
0
−0.2
0
50
100
150
Distancia [m]
Figura 7.5: Catenaria utilizada por Wu y Brennan
Wu y Brennan publicaron en [WB98a] un análisis de rigidez sobre la catenaria
que se muestra en la gura 7.5. Se han contrastado los resultados publicados con
los obtenidos utilizando el método propuesto en este trabajo y los resultados se
muestran en la gura 7.6. Esta gura muestra la rigidez en el vano central de la
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
66
catenaria calculada utilizando ambos métodos y la diferencia entre ellos.
Figura 7.6: Comparación en la distribución de rigidez
Se puede comprobar como las diferencias son pequeñas, especialmente en aquellos puntos donde hay péndolas. Esto es debido a que los datos publicados por Wu y
Brennan no ofrecían tantos valores como los que se han usado para calcular la distribución de rigidez con el método propuesto y han sido interpolados. No obstante
los resultados son satisfactorios.
7.5. Sistemas de transporte por cables conectados
por poleas
Bruno y Leonardi desarrollaron en [BL99] un método para el cálculo no lineal de
sistemas de transporte a través de cables, como por ejemplo funiculares o remontes
de esquí. En él desarrollan varios ejemplos en los que buscan la posición de equilibrio de dos cables conectados a través de una polea móvil. Contrastan su modelo
utilizando una aproximación numérica de elementos nitos.
Gracias a la versatilidad de la implementación presentada en este trabajo es
posible introducir elementos móviles como las poleas e incluso obtener posiciones
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
Distancia
Rigidez
(N/m)
Diferencia
(m)
CALESCA
Wu Brennan
∆%
0
3960.5
4094.26
3.37748
1.13636
4160.64
4299.18
3.32975
2.43506
5379.85
5672.13
5.43284
3.24675
4028.27
4299.18
6.72522
3.8961
3342.47
3459.02
3.4869
5.19481
2726.63
2905.74
6.56891
6.33117
2608.29
2659.84
1.97621
7.46753
2615.2
2659.84
1.70676
9.09091
2074.07
2106.56
1.56659
10.7143
1831.49
1881.15
2.71125
12.3377
1881.88
1881.15
0.0387361
15.4221
1522.65
1532.79
0.66552
17.5325
1585.57
1614.75
1.8405
20.4545
1374.33
1409.84
2.58364
22.5649
1470.02
1491.8
1.48188
25
1335.49
1368.85
2.49843
67
Tabla 7.6: Comparativa de cálculo de rigidez
de equilibrio en las que alguna de las reacciones sea una condición impuesta, como
es el caso de una polea móvil ya que se puede modelar como un nodo de contorno
situado de tal forma que no aparezca reacción en el plano horizontal. Asimismo
sería posible añadir el efecto del rozamiento estático de dicha polea o del sistema
que utilizase para desplazarse. En este caso no se ha tenido en cuenta ningún tipo
de rozamiento para poder contrastar los resultados con la referencia.
El caso de vericación está compuesto por un cable de longitud
módulo de Young
longitud
E = 2 · 106 kg/cm2 ,
w = 6,327kg/m.
P 2 = (300, 0, 50)
área
A = 8,05cm2
y peso por unidad de
Dicho cable está jado en los puntos
unidos por una polea situada a
z3 = 100m.
L0 = 500m,
P 1 = (0, 0, 0)
y
CAPÍTULO 7.
68
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
x3=282.8 m
x3=47.6 m
T
L2
T
CALESCA
Brunno
100 m
L2
P1
T
T
P2
L1
L1
300 m
Figura 7.7: Contraste gráco de los resultados obtenidos
En la gura 7.7 se pueden ver las curvas obtenidas utilizando el método propuesto(en colores) superpuestas a las obtenidas por Bruno y Leonardi (lineas negras
continuas y discontinuas). Asimismo, el cuadro 7.7 reeja los resultados numéricos
de ambos cables. En ella,
x3
es la posición de equilibrio de la polea,
del cable desde el soporte izquierdo hasta la polea,
la polea hasta el soporte derecho,
T
L2
L1
la longitud
la longitud del mismo desde
la tensión del cable en la polea y
∆,
en tan-
to por ciento. Todas las longitudes están expresadas en metros y las tensiones en
kilogramos al igual que se encuentra en la referencia.
7.6. Cálculo del pendolado de una catenaria de tren
de velocidad alta
Como siguiente caso de validación se abordará el cálculo de la longitud de las
péndolas de una catenaria de velocidad alta. Este es un claro ejemplo de problema
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
CALESCA
Referencia
∆( %)
x3
283.124
282.81
0.111175
L1
447.225
446.37
0.191514
L2
52.7751
52.86
0.160537
T
1833.53
1830
0.193029
x3
47.3323
47.67
0.708307
L1
110.96
111.07
0.0992642
L2
389.04
388.18
0.221612
T
1481.23
1478
0.218694
69
Tabla 7.7: Contraste numérico de los resultados
de equilibrio inicial ya que la longitud de dichas péndolas es desconocida y, por lo
tanto, también la posición de los hilos de contacto y sustentado como se ha explicado
en la sección 4.1.2. Anteriormente, O.Lopez-Garcia
et al.
desarrollaron un método
bidimensional especíco para este cálculo en [LGCT06] partiendo de la ecuación
exacta de la catenaria, aproximando las ecuaciones de compatibilidad descritas en
la sección 6.2 y añadiendo el efecto de las péndolas independientemente utilizando un
doble algoritmo de resolución de sistemas de ecuaciones no lineales
Newton-Raphson
para corregir la longitud de las mismas. Estos autores comparan sus resultados con
los obtenidos por métodos aproximados pero ampliamente utilizados en el sector
ferroviario descritos por Montesinos y Carmona en [MC02].
El cálculo del pendolado se realizará sobre la catenaria de velocidad alta CRU
220 diseñada por RENFE cuyas características se denen en la tabla 7.8.
A partir de estos datos, se han sido resuelto y contrastado dos problemas diferentes. El primero de ellos es el cálculo de la longitud de cada una de las péndolas,
Np, para un cantón de un solo vano de la catenaria CRU 220. En este caso los resultados obtenidos se han contrastado con dos modelos aproximados que se pueden
encontrar en [MC02] (Ref.1 y Ref.2) y el modelo publicado en [LGCT06]. Notar que
∆
representa la diferencia relativa en tanto por ciento entre el modelo propuesto
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
Longitud del vano
52 m
Sección del sustentador
2
153 mm
Masa lineal del sustentador
1,414 kg/m
Sección del hilo de contacto
2
120 mm
Masa lineal del hilo de contacto
1,07 kg/m
Número de hilos de contacto
2
Tensión mecánica en el sustentador
15892 N
Tensión mecánica en hilo de contacto
15009 N
Flecha inicial
20 cm
Grifa sustentador
120 g
Grifa hilo de contacto:
350 g
Tipo de péndola
Cable de cobre exible
70
2
de 16 mm -0.1 kg/m
Tabla 7.8: Datos de la catenaria CRU 220
y el obtenido utilizando los resultados encontrados en [LGCT06], ya que es el más
preciso de los anteriores.
Como reeja el cuadro 7.9, la diferencia entre los resultados que aparecen en la
literatura y los obtenidos con esta metodología es pequeña, aumentando la misma
en la comparación con los modelos de Montesinos y Carmona (Ref.1 y Ref.2). No
obstante, se justica ya que el método empleado por los autores aproxima el modelo
y acepta algunos errores.
Con el n de evidenciar la versatilidad de
CALESCA
sin que la precisión del
método se vea resentida, se ha analizado un segundo caso en el que se calcula la
longitud de las Np péndolas en un cantón de 4 vanos, contrastando los resultados
posteriormente con los que aparecen en [LGCT06] (Ref. 3).
Los resultados del cuadro 7.10 evidencian la precisión del modelo propuesto. La
máxima diferencia encontrada es de
0,217 %,
el cual es justicable debido a que en
el método de O. Lopez-Garcia la constante de la catenaria se aproxima a partir de
CAPÍTULO 7.
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
Np
Ref. 1
Ref. 2
Ref. 3
Propuesto
∆( %)
1
1.081
1.084
1.0859
1.08543
0.0437
2
0.935
0.939
0.942048
0.941346
0.0745
3
0.823
0.827
0.831808
0.830931
0.105
4
0.743
0.746
0.752262
0.75126
0.133
5
0.695
0.698
0.703388
0.702309
0.153
6
0.681
0.681
0.688061
0.686957
0.160
7
0.695
0.698
0.703388
0.702309
0.153
8
0.743
0.746
0.752262
0.75126
0.133
9
0.823
0.827
0.831808
0.830931
0.105
10
0.935
0.939
0.942048
0.941346
0.074
11
1.081
1.084
1.0859
1.08543
0.044
71
Tabla 7.9: Validación de la catenaria CRU 220 con 1 vano
la tensión del cable en lugar de la tensión horizontal como dene la expresión exacta
c=
Tx
.
w
En virtud de las dos comparativas llevadas a cabo en este apartado, se verica
que los resultados obtenidos son correctos y corresponden a la posición de equilibrio.
CAPÍTULO 7.
72
VERIFICACIÓN DE LA IMPLEMENTACIÓN DEL MODELO
Np
Ref. 3
Propuesto
∆( %)
Np
Ref. 3
Propuesto
∆( %)
1
1,08317
1,08269
0,0449
23
1,06223
1,06158
0,061
2
0,937504
0,936783
0,0768
24
0,918425
0,917494
0,101
3
0,825445
0,824544
0,109
25
0,808226
0,807073
0,142
4
0,744079
0,743047
0,139
26
0,728709
0,727397
0,180
5
0,693383
0,69227
0,1609
27
0,679853
0,678444
0,207
6
0,676231
0,675091
0,169
28
0,664532
0,663091
0,217
7
0,689731
0,688613
0,162
29
0,679853
0,678444
0,207
8
0,736774
0,735731
0,142
30
0,728709
0,727397
0,180
9
0,814485
0,813567
0,113
31
0,808226
0,807073
0,143
10
0,922885
0,922143
0,080
32
0,918425
0,917494
0,101
11
1,06489
1,06438
0,0483
33
1,06223
1,06158
0,060
12
1,06223
1,06158
0,0607
34
1,06495
1,06432
0,059
13
0,918425
0,917494
0,101
35
0,922969
0,922059
0,099
14
0,808226
0,807073
0,143
36
0,814588
0,813463
0,138
15
0,728709
0,727397
0,180
37
0,736891
0,735613
0,173
16
0,679853
0,678444
0,207
38
0,689856
0,688486
0,197
17
0,664532
0,663091
0,217
39
0,676359
0,674962
0,207
18
0,679853
0,678444
0,207
40
0,693508
0,692144
0,197
19
0,728709
0,727397
0,180
41
0,744195
0,74293
0,170
20
0,808226
0,807073
0,143
42
0,825546
0,824442
0,134
21
0,918425
0,917494
0,101
43
0,937584
0,936702
0,0941
22
1,06223
1,06158
0,0607
44
1,08323
1,08263
0,0550
Tabla 7.10: Validación O.Lopez-Garcia - Catenaria CRU220 - 4 vanos
Capítulo 8
Ejemplo de aplicación
8.1. Creación de una malla de elementos nitos
Una aplicación muy interesante del método desarrollado, que se está utilizando
en la actualidad, es la generación de mallas de elementos nitos que cuenten con
toda la información necesaria para estar en equilibrio inicial. Para ello se le debe
indicar tanto la posición de los nodos como la deformación elástica de cada elemento
para, de esta manera, compensar las fuerzas externas y las fuerzas internas. Como se
ha comentado anteriormente, el cálculo de la respuesta dinámica de una estructura
de cables, como puede ser una catenaria ferroviaria, puede tardar entre 8 y 10 horas
de los cuales entre un 10 % y un 15 % se consume en el cálculo del equilibrio inicial
por lo labroioso que resulta utilizando los métodos actuales tal y como se comentó
al hablar del método del desplazamiento no lineal.
Para aplicar esta metodología al equilibrio inicial de una estructura de cables en
general, y de una catenaria ferroviaria en particular, se procedería de la siguiente
manera. En primer lugar se resuelve la posición de equilibrio utilizando el método
presentado, en este caso implementado en
CALESCA,
con lo que el resultado se
obtiene en apenas unos segundos. La representación de dicha posición de equilibrio
se puede ver en la gura 8.1.
Esta disposición se obtiene a partir de los datos facilitados al diseñador. En este
73
CAPÍTULO 8.
74
EJEMPLO DE APLICACIÓN
1.4
1.2
1
Altura [m]
0.8
0.6
0.4
0.2
0
−0.2
0
20
40
60
80
100
Distancia [m]
120
140
160
180
Figura 8.1: Posición de equilibrio de la catenaria
caso, se jarían las propiedades de los cables que forman la estructura, la disposición
de las péndolas, la tensión de los hilos sustentador y de contacto y la posición del
hilo de contacto. Si en lugar de jar esta posición se preere jar la longitud de las
péndolas también es posible. Sin embargo, en la etapa de diseño estas longitudes
aún son desconocidas y es preciso calcularlas.
Fijado el tamaño de la malla de elementos nitos con que se desea discretizar la
estructura, se procede a calcular posiciones intermedias de los cables para unirlos
por elementos nitos tipo viga o barra según corresponda. Esto se hace utilizando
la ecuación de la catenaria. Cuanto mayor sea el número de elementos mayor será
la precisión del modelo MEF que se utilice. No obstante, cuanto mayor sea dicho
número mayor será el tiempo necesario para su cálculo. La malla resultante se
muestra en la gura 8.2. Como se puede ver los nuevos nodos coinciden con la
gura anterior.
Con esta malla, ya en equilibrio, el tiempo de cálculo se reduce a apenas 10
segundos utilizando una malla con 1120 grados de libertad y una precisión de
10−8 .
CAPÍTULO 8.
75
EJEMPLO DE APLICACIÓN
1.2
1
Altura [m]
0.8
0.6
0.4
0.2
0
−0.2
60
70
80
90
Distancia [m]
100
110
120
Figura 8.2: Vano central de la catenaria con malla MEF
En la gura 8.3 se muestra la diferencia entre el equilibrio encontrado utilizando
el método propuesto y el mismo tras el equilibrado por elementos nitos. Como
se puede ver, la máxima diferencia es mínima. Esta se debe fundamentalmente al
método de los elementos nitos aunque es posible reducir el error tanto como se
desee aumentando el número de elementos de la malla. A partir de esta disposición
se pueden realizar diferentes cálculos dinámicos como por ejemplo la interacción
dinámica con el pantógrafo o la respuesta frente al viento.
CAPÍTULO 8.
76
EJEMPLO DE APLICACIÓN
−7
3
x 10
Diferencia
2.5
Diferencia [m]
2
1.5
1
0.5
0
0
20
40
60
80
100
Distancia [m]
120
140
160
180
Figura 8.3: Desplazamientos desde el equilibrio de los nodos
Capítulo 9
Conclusiones
En esta primera parte se propone un nuevo método para el cálculo estático de
estructuras tridimensionales de cables. Este método se basa en las ecuaciones analíticas de la catenaria y supone una generalización de una aplicación previa para el
cálculo de equilibrio inicial de catenarias presentado en [LGCT06]. La validación del
método se ha llevado a cabo mediante la comparación con problemas de estructuras
de cables publicados en la literatura cientíca. La similitud de estos resultados con
los publicados es muy elevada, no superando las diferencias el
casos y el
1%
7%
en el peor de los
en valor medio.
Las aportaciones más relevantes de este método respecto al anteriormente citado
son las siguientes:
El método anterior consideraba sólo cables estructuras de cables bidimensionales en el plano vertical. En el nuevo método, aprovechando que las catenarias
están contenidas en un plano vertical, se incorpora una formulación semianalítica completamente tridimensional.
Además se tiene en cuenta la elasticidad de los cables. A pesar de que esta suele ser despreciable algunas aplicaciones requieren la consideración de
deformación elástica en estructuras de cables.
Las restricciones propias de las estructuras de cables son incorporadas en la
77
CAPÍTULO 9.
CONCLUSIONES
78
formulación de una forma natural. Además pueden emplearse para incluir modelos de dispositivos mecánicos como poleas, pretensores de cables, soportes,
muelles, etc.
Respecto a otros métodos de simulación de estructuras de cables las principales
ventajas que éste presenta son las siguientes:
Debido a que este método está basado en las ecuaciones exactas de la catenaria,
las ventajas propias del método propuesto en [LGCT06] le son inherentes.
Desde un punto de vista numérico, el método presenta una alta eciencia,
no dependiendo de la discretización espacial, determinandose el tamaño del
problema de la topología de la estructura.
Por otra parte la mayoría de algoritmos de resolución de sistemas de ecuaciones
no lineales algebraicos requieren el cálculo de la matriz jacobiana. A pesar de
que su cálculo es laborioso, las expresiones analíticas de la matriz jacobiana
son intrínsecas al método lo cual le reporta una mayor rapidez y precisión.
El problema de equilibrio inicial y el cálculo del equilibrio estático bajo cargas
se resuelven siguiendo el mismo algoritmo. Gracias al tratamiento de los parámetros conocidos y desconocidos ambos tipos de problemas se pueden resolver
fácilmente.
El método tratado en esta parte es perfectamente válido para la mayoría de las
aplicaciones ingenieriles tales como catenarias ferroviarias, sistemas de transporte
de energía eléctrica, redes de metro, funiculares, etc.
Parte II
Interacción Dinámica
Catenaria-Pantógrafo
79
80
El método desarrollado en la primera parte permite obtener una malla de elementos nitos de una catenaria en equilibrio inicial. Aprovechando dichos resultados, en
la segunda se propone un nuevo método para simulación de la interacción dinámica
pantógrafo-catenaria basado en el método de los elementos nitos. La resolución
de este problema utilizando dicha técnica tiene varios problemas desde el punto de
vista numérico y matemático. En la presente parte se detalla el método propuesto
para resolverlo y se estructurará de la siguiente manera: En primer lugar se expone
una revisión de los principales métodos de cálculo utilizados en la actualidad para
resolver problemas dinámicos estructurales, capítulo 10. A continuación, los capítulos 11, 12 y 13 presentan la formulación utilizada para la resolución de la interacción
dinámica catenaria-pantógrafo. El capítulo 14 presenta la validación del método con
la norma EN50318. Por último, el Capítulo 15 presenta brevemente las conclusiones
del trabajo. Las referencias empleadas en el desarrollo del trabajo serán presentadas
en orden alfabético al nal del documento.
Capítulo 10
Estado del Arte
El conocimiento de la dinámica del sistema catenaria-pantógrafo es crucial para
el correcto diseño de líneas de alta velocidad. En los últimos años se ha hecho un
gran esfuerzo en comprender el comportamiento del sistema con el tren en marcha:
aproximación analítica de la fuerza de contacto (Ockendon, [OT71]), análisis por
elementos nitos de la variación de la fuerza de contacto (Vinayagaligam, [Vin83]),
determinación de frecuencias y modos propios (Wormley, [EOSW88]), etcétera. Uno
de los trabajos más interesantes que se ha publicado en este contexto es el realizado
por T.X. Wu y M. J. Brennan,
tem Dynamics
Basic Analytical Study of Pantograph-catenary Sys-
[WB98b], en el que se propone un modelo simplicado del sistema
catenaria-pantógrafo de un grado de libertad. Parte de un modelo de pantógrafo
de dos grados de libertad. Con una masa superior representa las pletinas del pantógrafo y con otra inferior introduce el efecto de la inercia del armazón articulado.
Por su parte, la catenaria se sustituye por una serie de resortes de distinta rigidez
contra los que las pletinas del pantógrafo contactan. Si la rigidez del pantógrafo
es muy superior a la que presenta la catenaria pueden condensarse las masas del
pantógrafo en una única masa. De este modo, la catenaria quedaría representada
mediante un resorte de rigidez variable. Es importante observar que en este modelo
simplicado se desprecia la masa de la catenaria. La distribución de rigidez a lo
largo de la catenaria no varía de forma suave (aparecen picos de rigidez al paso
81
CAPÍTULO 10.
82
ESTADO DEL ARTE
por las péndolas), lo que diculta el análisis matemático del comportamiento del
sistema -respuesta temporal, estabilidad del pantógrafo, etc.- al no disponerse de
una expresión analítica que proporcione la rigidez.
Representar la variación de rigidez en la catenaria por medio de la envolvente
puede ser una buena aproximación si los incrementos de rigidez al paso por las
péndolas son reducidos. Sin embargo, cuando dichos incrementos alcanzan un valor
apreciable, el empleo de la envolvente como distribución de rigidez deja de ser apta
debido a los errores introducidos.
Este modelo, aunque simple, es capaz de describir gran parte de las características dinámicas del sistema, permitiendo efectuar análisis interesantes, como son
la estabilidad del conjunto catenaria-pantógrafo o la obtención analítica tanto del
desplazamiento vertical de la catenaria como de la fuerza de contacto.
Estos mismos autores publicaron en 1999 una continuación del estudio anterior
(Dynamic
stiness of a railway overhead wire system and its eect on pantograph-
catenary system dynamics
[WB99]) donde se analiza el efecto que la propagación
de ondas tiene sobre la rigidez de la catenaria. Para ello desarrollaron un nuevo
modelo de catenaria que contemplara aspectos no recogidos en el modelo anterior,
contando con la masa de la catenaria y permitiendo introducir el efecto de las ondas
de perturbación sobre el comportamiento del sistema. O.Lopez-García y J.L.Maroño
profundizaron en este modelo en
Inuence of stiness and contact modelling on
catenarypantograph system dynamics [LGCM07]
donde realizan un análisis de la
sensibilidad de la fuerza de contacto a la rigidez de la catenaria.
Otro trabajo relevante es el publicado por G. Poetsch et al.,
ry dynamics and control
Pantograph/Catena-
+
[PEM 97]. Este interesante documento aborda gran parte
de la problemática que plantea el contacto entre catenaria y pantógrafo, especialmente de cara al análisis matemático de la dinámica del sistema. Resulta especialmente interesante el epígrafe 2,
Modelling and simulation of the system dynamics,
en el que se hace un repaso de los principales métodos de modelado tanto de la catenaria como del pantógrafo. Asimismo, se analizan una serie de métodos numéricos
CAPÍTULO 10.
83
ESTADO DEL ARTE
apropiados para la resolución de las ecuaciones dinámicas resultantes. Para nalizar, aparece un completo análisis de las ventajas que podría ofrecer la implantación
de pantógrafos activos con ánimo de conseguir un mejor comportamiento del sistema. Por último, el trabajo publicado por Tong-Jin Park et al.,
analysis for the pantograph of a high speed rail vehicle
Dynamic sensitivity
[PHJ03] analiza las caracte-
rísticas dinámicas del sistema mediante elementos nitos, de forma que sea posible
efectuar un análisis paramétrico de sensibilidad y mejorar las prestaciones del conjunto. Concretamente se presenta la catenaria como una malla de elementos nitos
tipo viga y el pantógrafo como un sistema discreto masa-muelle-amortiguador de
tres grados de libertad. El modelo resultante del acoplamiento catenaria-pantógrafo
se ensayó de forma que se apreciaran las diferencias en la fuerza de contacto según se
hacían variar los parámetros del pantógrafo. De esta forma pudieron obtenerse conclusiones interesantes acerca de los valores que han de tener los distintos elementos
del pantógrafo de cara a optimizar el comportamiento del sistema.
Capítulo 11
Formulación del problema dinámico
en cables
En el cálculo estructural, las ecuaciones de campo que rigen el comportamiento
del medio continuo se obtienen mediante la aplicación de las ecuaciones de equilibrio, compatibilidad y comportamiento. Éstas generan un sistema de ecuaciones
diferenciales que relaciona las variables de campo con funciones conocidas que recogen el efecto de los distintos parámetros involucrados en el problema. La descripción
general del movimiento en dirección longitudinal de una barra puede describirse, por
tanto, partiendo de estas ecuaciones. Considerando el sólido de la gura 11.1 sometido a esfuerzos en dirección axil, es posible obtener la primera ecuación diferencial
del equilibrio.
∂N (x, t)
∂2u
= ρA 2 − n(x, t)
∂x
∂t
siendo
N (x, t)
y
n(x, t)
(11.1)
cargas en dirección axil, concentrada y distribuida res-
pectivamente. La ecuación de comportamiento (11.2) es la que relaciona, en segundo
lugar, la carga impuesta
dulo elástico
E
y el área
N (x, t)
A
con la deformación
ε(x)
del sólido mediante el mó-
de la barra.
N (x, t) = AEε(x)
84
(11.2)
CAPÍTULO 11.
85
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
n(x)
N ( x)
N (x)+@N(x)
d(x)
Figura 11.1: Prisma diferencial sometido a esfuerzo axil
Por último, la ecuación de compatibilidad plasmará la relación de la deformación
ε(x)
y los desplazamientos. Para el caso unidimensional y de acuerdo a una
formulación lagrangiana, dado que el objeto de estudio es el propio sólido, se partirá
de la medida de la deformación de Green:
ε(x) =
donde lo y
l
l2 − lo2
2lo2
(11.3)
las longitudes inicial y deformada de la barra respectivamente.
Esta medida de la deformación converge a la denición general para pequeñas
deformaciones como se demuestra haciendo el desarrollo en serie de Taylor para
l ≈ lo
de (11.4).
(l + ∆l)2 − l2
2l2
2
1 l + ∆l2 + 2l∆l − l2
∆l
=
≈
2
l2
l
ε(l ≈ lo ) =
(11.4)
Con la perspectiva de la formulación dinámica de cables, es preciso contemplar
la no linealidad geométrica y su inuencia en la deformación de los mismos. Esto
exige extender la denición de Green (11.3) al estado de deformación bidimensional
que reeja la gura 11.2:
CAPÍTULO 11.
86
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
z
|)dx
( 1+du
dx
|
| dx
(dw
dx )
dx
x
Figura 11.2: Deformación de green
Considerando para este propósito el segmento elemental
al eje
x,
dx inicialmente paralelo
si su estado deformado es el de la gura 11.2, su longitud nal
ds
puede
ser evaluada mediante el teorema de Pitágoras sobre los desplazamientos, ecuación
(11.5):
2
ds =
∂u
dx +
dx
∂x
2
+
∂w
dx
∂x
2
(11.5)
sustituyendo (11.5) en (11.3), la componente horizontal (la componente de interés para una barra de directriz recta sometida a esfuerzos de tracción-compresión)
de la deformación bidimensional de Green se dene como:
CAPÍTULO 11.
87
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
ds2 − dx2
2dx2
!
2 2
∂u
∂w
1
1+
+
−1
=
2
∂x
∂x
2 2 !
∂u 1
∂u
∂w
=
+
+
∂x 2
∂x
∂x
ε(x) =
siendo
u
w
el desplazamiento horizontal y
(11.6)
el vertical del sólido
dx.
Por consi-
guiente, la ecuación de compatibilidad quedará como (11.7).
∂u 1
+
∂x 2
ε(x) =
∂u
∂x
2
1
+
2
2 !
∂w
∂x
(11.7)
Combinando las tres ecuaciones diferenciales (11.1), (11.2) y (11.7) se obtiene:
∂
EA
∂x
∂u 1
+
∂x 2
∂u
∂x
2
1
+
2
∂w
∂x
2 !
= ρA
∂2u
− n(x, t)
∂t2
(11.8)
Aplicando el principio de los trabajos virtuales,
Z
∂W =
σ∂εdΩ
(11.9)
Ω
siendo
Ω el dominio de integración, se obtiene la formulación débil de este problema.
Sustituyendo en ella la expresión (11.8) y aplicando las funciones de forma,
ψi ,
sobre las deformaciones virtuales se obtiene
Z
0
l
∂ψi
EA
∂x
∂u 1
+
∂x 2
∂u
∂x
2
1
+
2
∂w
∂x
2 !
Z
dx +
ψi ρA
0
Z
l
∂2u
dx =
∂t2
l
ψi n(x, t)dx + (ψi N )0l
(11.10)
0
donde habiendo integrado por partes y aplicado el teorema de Green al dominio
Ω,
los trabajos interno y externo equivalen a los términos izquierdo y derecho de la
ecuación (11.10) respectivamente.
Análogamente, la descripción general del movimiento en dirección transversal a
una barra también puede puede describirse partiendo de las ecuaciones de equilibrio,
CAPÍTULO 11.
88
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
z
2'
b'
w +dw
|
|dx
dx
w2
a'
w
1'
u1
w1
x+u
x+u+dx+du
| dx
dx
1
a
x
b
2
dx
u2
L
x
Figura 11.3: Deformación plana
comportamiento y compatibilidad. No obstante, se puede obtener considerando los
efectos de exión en la expresión de la deformación de Green, como se observa en la
gura 11.3, desarrollada en la ecuación (11.6) y despreciando los efectos de rotación
y alargamiento del eje debido a la exión. Haciendo esto la deformación total queda
expresada como
∂2w 1
∂u
−z 2 +
ε=
∂x
∂x
2
∂u
∂x
2
+
∂w
∂x
2 !
(11.11)
Insertando esta nueva deformación en la ecuación (11.9) y considerando que
σ = −z MIyy
obtenemos la expresión generalizada ante la combinación de cargas
axiales y ectoras
Z
0
l
∂ψi
EA
∂x
∂u 1
+
∂x 2
∂u
∂x
2 !
2 Z l 2
1 ∂w
∂ ψi
∂ w
dx +
+
EI
dx
y
2
2 ∂x
∂x2
0 ∂x
Z l
Z l
∂2u
+
ψi ρA 2 dx =
ψi n(x, t)dx + (ψi N )0l (11.12)
∂t
0
0
2
Empleando la aproximación de Galerkin para el campo de desplazamientos,
CAPÍTULO 11.
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
89
(u, w)
u=
X
w=
X
ψj Uj
ψj Wj
(11.13)
y empleando funciones de soporte local, se llega a la discretización clásica del método
de los elementos nitos.
Añadiendo los efectos dinámicos relativos a la aceleración como esfuerzos proporcionales a la masa y los relativos a la velocidad como proporcionales al amortiguamiento, la expresión (11.12) queda representada como
Mü + Cu̇ = f − q
donde
(11.14)
M es la matriz de masa, C es la matriz de amortiguamiento, f es el vector
de fuerzas externas,
q es el vector de fuerzas internas, y u es el vector (incógnita)
de desplazamientos nodales. Para resolver este sistema se deben utilizar métodos de
integración numérica. Estos métodos utilizan, generalmente, la matriz tangente, o
jacobiano, al vector de fuerzas internas,
q,
y se denota como
Kt .
11.1. Formulación del elemento co-rotacional
El enfoque co-rotacional, entendido como una vía alternativa para formular elementos nitos no lineales, ha suscitado un creciente interés durante la última década,
ver [RB86, RnO88, Cri90, nNOR91, PE95, PE97, HL00]. La idea subyacente en este
contexto es la descomposición del movimiento del elemento en una parte rígida y
otra deformable mediante la referencia a un sistema de coordenadas locales
(xl , zl )
solidarias al elemento y, por tanto, a sus movimientos de rotación y traslación, ver
gura 11.4.
Así, en el movimiento del elemento desde su estado original hasta su conguración deformada se distingue: en primer lugar una traslación y rotación rígida del
elemento y; en segundo lugar, una deformación en el sistema de coordenadas local.
CAPÍTULO 11.
90
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
z
xl
¹
u
2'
µ2
µ l2
zl
µ l1
µ1
w2
®
¯
u1
2
1'
u2
w1
¯0
1
x
Figura 11.4: Deformación del elemento corrotacional
Asumiendo que la longitud del elemento se hubiera elegido convenientemente, estas
deformaciones serán siempre pequeñas respecto a los ejes locales y, consecuentemente, podrán expresarse como una no linealidad de bajo orden. No obstante, ha de
hacerse énfasis en que el bajo orden de la no linealidad es sólo aparente, pues la no
linealidad geométrica permanece realmente incluida en el movimiento del sistema
coordenado local.
La principal ventaja del enfoque co-rotacional estriba en la separación articial
de las no linealidades material y geométrica en el elemento. Mientras la parte material tiene lugar en el sistema local donde se asume linealidad geométrica, la no
linealidad geométrica se hace presente en las rotaciones rígidas y traslaciones del
elemento sin deformar. Incluso incluyendo en la denición de la deformación términos que reejen una no linealidad de bajo orden, las expresiones del vector de
CAPÍTULO 11.
91
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
esfuerzos internos y de la matriz de rigidez tangente resultantes son muy simples.
El objeto de esta sección es denir el marco co-rotacional, siguiendo el enfoque
de Criseld [Cri91], que dene las relaciones entre las expresiones locales y globales
del vector de fuerzas internas y la matriz de rigidez tangente representadas como
y
Kt
en la expresión (11.14).
las coordenadas de los nodos
son
q
(x1 , z1 )
y
(x2 , z2 ),
1
y
2
en el sistema de coordenadas global
(x, z)
siendo el vector de desplazamientos globales:
pg = (u1 w1 θ1 u2 w2 θ2 )T
(11.15)
El vector de desplazamientos locales se dene según 11.4:
pl = (ul θl1 θl2 )T
calculando las componentes de
pl
(11.16)
como sigue:
ul = ln − lo
(11.17)
θl1 = θ1 − α
(11.18)
θl2 = θ2 − α
(11.19)
denotando lo y ln en la (11.17) las longitudes inicial y actual del elemento,
y
α
con:
lo = ((x2 − x1 )2 + (z2 − z1 )2 )1/2
(11.20)
ln = ((x2 + u2 − x1 − u1 )2 + (z2 + w2 − z1 − w1 )2 )1/2
(11.21)
la rotación rígida, calculándose como:
sin α = cos βo sin β − sin βo cos β
(11.22)
cos α = cos βo cos β − sin βo cos β
(11.23)
CAPÍTULO 11.
1
(x2 − x1 )
lo
1
so = sin βo = (z2 − z1 )
lo
1
c = cos β = (x2 + u2 − x1 − u1 )
ln
1
s = sin β = (z2 + w2 − z1 − w1 )
ln
co = cos βo =
siendo
α,
92
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
tal que
(11.24)
(11.25)
(11.26)
(11.27)
|α| < π :
α=
sin−1 (sin α)
si
sin α ≥ 0
y
cos α ≥ 0
(11.28)
α=
cos−1 (cos α)
si
sin α ≥ 0
y
cos α < 0
(11.29)
α=
sin−1 (sin α)
si
sin α < 0
y
cos α ≥ 0
(11.30)
si
sin α < 0
y
cos α < 0
(11.31)
α = − cos−1 (cos α)
Para aplicar el principio de los trabajos virtuales es preciso obtener los desplazamientos locales virtuales derivando las ecuaciones (11.17), (11.18) y (11.19):
δul = cos β (δu2 − δu1 ) + sin β (δw2 − δw1 ) =
= (− cos β − sin β 0 cos β sin β 0) δ pg = rt δ pg
δθl1 = δθ1 δα = δθ1 δβ
con
(α = β − β0 )
(11.33)
δθl2 = δθ2 − δα = δθ2 − δβ
Asimismo, derivando la ecuación (11.27) es posible obtener
δβ =
tomando
δln = δul
(11.32)
(11.34)
δβ
1
((δw2 − δw1 )ln − (z2 + w2 − z1 − w1 )δln )
cln2
(11.35)
de la ecuación (11.32) y simplicando:
1
((δw2 − δw1 ) − sc(δu2 − δu1 ) − s2 (δw2 − δw1 ))
cln
1
(s − c 0 − s c 0)δ pg = zt δ pg
δβ =
ln
δβ =
(11.36)
CAPÍTULO 11.
93
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
Aplicando (11.36) en (11.33) y (11.34):
δθl =
001000
− 1
ln
000001
z
pg = AT δpg
t
z
t
(11.37)
Quedando nalmente la relación de desplazamientos locales y globales como
sigue:
δul
δ pl = δθl1
δθl2
−c
−s
0
c
s
0
=
−s/ln c/ln 1 s/ln −c/ln 0 δ pg
−s/ln c/ln 0 s/ln −c/ln 1
δ pl =
(11.38)
r
δ pg = Bδ pg
t
A
t
(11.39)
La relación entre los vectores de esfuerzos internos local y global,
ql
y
qg
res-
pectivamente, se obtiene igualando los trabajos virtuales,W , en ambos sistemas de
referencia según reeja la ecuación (11.40). Dependiendo el vector de esfuerzos internos local de esta relación,
qtl = (N, M 1 , M 2 ), de la denición propia del elemento.
Wint = δ ptgv qg = N δuv + M 1 δθl1v + M 2 δθl2v = δ ptlv ql = δ ptgv Bt ql
Así, para cualquier vector de desplazamientos virtuales
de fuerzas internas
δ qg
δ pg
(11.40)
arbitrario, el vector
queda como sigue:
qg = Bt ql
Siendo preciso conocer las tensiones
(11.43) para el cálculo de
δ ql
(11.41)
resultantes de las ecuaciones (11.42) y
δ qg .
N=
EAul
lo
(11.42)
CAPÍTULO 11.
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
M1
94
2 1
θ
= 2EI
l1
lo
M2
1 2
θl2
(11.43)
No obstante, la ecuación (11.42) asume que la deformación axil del elemento
es igual al cociente de la deformación relativa entre sus extremos y la longitud
del elemento recto. Tal aproximación no permite considerar cualquier otro tipo de
deformación sobre un elemento inicialmente recto, por ejemplo la resultante de su
exión (ver gura 11.4).
Este efecto puede ser tenido en cuenta incluyendo los términos de segundo orden en la deformación de Green relativa al sistema co-rotacional para un elemento
inicialmente recto, quedando la deformación local como sigue:
dul 1
+
εxl =
dxl 2
dul
dxl
2
1
+ θl2
2
(11.44)
Deniendo el cambio de base isoparamétrico (11.45), con
zamiento local
ul (ξ)
ξ ∈ (−1 1),
el despla-
puede expresarse como:
1
xl = (1 + ξ)lo
2
(11.45)
1
ul (ξ) = (1 + ξ)ul
2
(11.46)
Diferenciando la ecuación (11.46) se obtiene la deformación local
εxl =
dul
dul dξ
ul
=
=
dxl
dξ dxl
lo
(11.47)
Asimismo, deniendo el desplazamiento transversal local
mediante un polinomio cúbico de
ξ
wl ,
ver gura 11.4,
según muestra (11.48), es posible determinar el
giro (11.49) nuevamente mediante diferenciación.
wl (ξ) =
2
t
lo (ξ − 1)(ξ − 1) θl1
8
(ξ 2 − 1)(ξ + 1)
θl2
(11.48)
CAPÍTULO 11.
95
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
θl (ξ) =
3ξ 2 − 2ξ − 1
t
dwl
dwl dξ
lo
θl = st θl
=
=
dxl
dξ dxl
4
2
3ξ + 2ξ − 1
(11.49)
Con la ayuda de las ecuaciones (11.47) y (11.49) es posible expresar (11.44) como
(11.50):
ul 1
+
εxl (ξ) =
xl 2
ul
xl
2
1
+ θtl sst θl
2
(11.50)
Asumiendo deformación constante, el último término de (11.50) puede ser modicado por su valor medio, quedando:
ul 1
εxl (ξ) =
+
lo
2
ul
lo
2
1 t
θ
+
2lo l
Z
sst dxl θl
(11.51)
Realizando el cambio de variable (11.45) e integrando en (11.51), se obtiene:
ul 1
εxl (ξ) =
+
lo
2
ul
lo
2
2
2
2
2
2
1 (3ξ − 2ξ − 1) (3ξ − 1) − 4ξ lo
dξθl
2
2
2
2
2
2
2
−1 4
(3ξ − 1) − 4ξ (3ξ − 2ξ − 1)
2
4
−1
ul 1 u l
1
θl
=
+
+ θtl
(11.52)
lo
2 lo
60
−1 4
+
1 t
θ
2lo l
Z
1
Derivando (11.52) para su inclusión en el trabajo virtual, con la ayuda de (11.32)
y (11.37), la variación de la deformación queda:
4
−1
δul ul δul
1
δθl
+
+ 2θtl
2
lo
xl
60
−1 4
4 −1
1
ul
1
At δ pg
=
1+
rt δpg + θtl
lo
lo
30
−1 4
δεxl (ξ) =
(11.53)
Con lo que nalmente, con la inclusión de los términos de segundo orden en la
deformación de Green, la ecuación (11.39) queda modicada como sigue:
CAPÍTULO 11.
δ pl
96
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
l δε
o xl
= δθl 1
δθl 2
=
1+
ul
lo
lo t
rt δpg + 30
θl
4
−1
At
−1
At
δ pg = Bδ pg
4
(11.54)
Derivando ahora (11.54) y deniendo la matriz de rigidez tangente
δ qg = Kg δ pg ,
como
se llega a la ecuación (11.55):
δ qg = Bt δ pl + N δ B1 + M 1 δ B2 + M 2 δ B3 = Kgt1 δ pg + Kgtσ δ pg
donde
Kg
(11.55)
B2 , por ejemplo, corresponde a la segunda la de B (ver (11.38) y (11.39)).
Asumiendo un comportamiento lineal del material y derivando las ecuaciones (11.42)
y (11.43) se obtiene:
δN
1
0
0
EA
2
2
=
δM 1
0 4r 2r δ pl = Cl δ pl
lo
δM 2
0 2r2 4r2
donde
r
(11.56)
es el radio de giro de la sección. Así, empleando la ecuación (11.56) se
obtiene el término de la matriz de rigidez tangente estándar
Kgt1
de la ecuación
(11.55):
Kgt1 = Bt Cl B
(11.57)
A su vez, la matriz de rigidez geométrica se obtiene de los tres últimos términos de (11.55). De forma que derivando la primera columna de
B
se obtienen los
siguientes términos:
δ B1 =
1+
ul
lo
δ rt +
δul t lo t 4 −1 t
r + δθl
A +
lo
30
−1 4
lo t 4 −1 δ B2
θ
30 l
−1 4
δ B3
(11.58)
CAPÍTULO 11.
97
FORMULACIÓN DEL PROBLEMA DINÁMICO EN CABLES
con ayuda de las ecuaciones (11.32) y (11.36) y observando que
gura 11.4) y que
δβ = δα
(ver
δ B2 = δ B3
1
ln
r = δβ z = zzt δpg
δ B2 =
(11.59)
1
1
1
δ z + 2 zδul = 2 (rzt + zrt )δ pg
ln
ln
ln
(11.60)
con (11.60),
lo
lo t 4 −1
(δ B2 δ B3 )t = (4θl1 − θl2 − θl1 + 4θl2 )(δ B2 δ B3 )t =
θl
30
30
−1 4
lo
1
(θl1 + θl2 ) 2 (rzt + zrt )δ pg(11.61)
10
ln
y por otra parte, con (11.37):
4
lo t
δθ
30 l
−1
−1
4
−1
At = lo δpt A
At =
30
4
−1 4
0 0
0
lo t
B 0 4 −1
Bδpg
30
0 −1 4
(11.62)
Por último, sustituyendo en (11.55) y simplicando, la expresión resultante de
la matriz de rigidez tangente es:
Kgtσ
0
0
0
N lo t
N (1 + ul /lo ) t
rrt
=
B 0 4 −1
zz + N +
B +
30
ln
lo
0 −1 4
1
1
(M
+
M
+
N lo (θl1 + θl2 ))(rzt + zrt )
1
2
2
ln
10
(11.63)
Capítulo 12
Formulación del contacto
catenaria-pantógrafo
Los algoritmos matemáticos que abordan el problema del contacto son generalizables a un número indeterminado
n
de cuerpos. Sin embargo, para simplicar el
proceso, este epígrafe se limitará al caso en que dos cuerpos interaccionan. La terminología seguida es la misma que recoge Ted Belytschko en el capítulo
de [BLM00] en el que se trata en profundidad el método del
¡a
penalty.
¡b
na
nb
¡c
­b
­a
Figura 12.1: Problema de contacto generalizado
98
Contact-Impact
CAPÍTULO 12.
99
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
En la gura 12.1 se muestra el esquema que se empleará para analizar el problema
del contacto. Para los cuerpos en contacto
Ωa
y
Γa
y
na
Ωb ,
Γb .
cuerpos:
y
nb
a
y
b,
cuyos dominios se denotan por
representan los vectores normales a sus respectivas supercies
Asimismo,
Γc
hace referencia a la supercie de contacto común a ambos
Γc = Γa ∩ Γa .
Desde el punto de vista matemático, la formulación del
contacto es independiente del cuerpo de referencia tomado, no obstante se designará
un cuerpo maestro o
master
y otro esclavo o
la formulación subsiguiente al cuerpo maestro
slave,
reriendo por comodidad toda
a, tomando el cuerpo b como esclavo.
En general, la supercie de contacto será una función temporal y su determinación
es una de las dicultades mayores que presenta el análisis matemático del problema
de contacto. Aunque las supercies
Γa
y
Γb
que denen el contacto no siempre sean
numéricamente coincidentes, se hará referencia a la supercie de contacto
Γc
como
una entidad única y solidaria al cuerpo maestro.
Habiendo denido las supercies de contacto, los desplazamientos en los puntos
de las mismas puede descomponerse como
ua = uaN · eaN + uaT · eaT
siendo
uN
de contacto y
,
ub = ubN · ebN + ubT · ebT
el módulo de la desplazamiento en la dirección normal a la supercie
uT
el módulo de el desplazamiento en la dirección tangencial a la
supercie de contacto de los cuerpos referidos por el superíndice
a o b, lo cual reeja
con mayor claridad la gura 12.2. Para obtener el desplazamiento
pos
a
y
b,
(12.1)
u
de los cuer-
se deben sumar vectorialmente los desplazamientos normal y tangencial
multiplicados por los vectores unitarios,
eT y eN , para cada una de estas direcciones.
Además de los principios generales de la mecánica (conservación de masas, momentos y energías), los cuerpos de la gura 12.2 han de satisfacer una condición
adicional de impenetrabilidad en virtud del contacto entre las supercies de los
mismos. Es decir, dado que teóricamente ningún subdominio puede pertenecer simultáneamente a ambos cuerpos, se ha de cumplir que
Ω a ∩ Ω b = ∅.
En general
esta condición de impenetrabilidad es altamente no lineal y no puede ser expresa-
CAPÍTULO 12.
100
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
­b
uan
ubn
¡c
ua
ub
uaT
­a
ubT
Figura 12.2: Sistemas de referencia locales
da como una ecuación algebraica o diferencial en términos del desplazamiento. Por
otra parte, tampoco la predicción de la región de contacto es trivial cuando existe
arbitrariedad en los movimientos, lo cual incrementa notablemente la complejidad
del problema. Sin embargo, es posible expresar la condición de impenetrabilidad de
forma incremental para cada etapa del proceso aplicándola a aquellas partes de los
cuerpos que estén en contacto,
Γc ,
aplicando que
γN = (ua + ub ) · na ≡ uaN − ubN ≤ 0
Suponiendo que los cuerpos
interpenetración nula,
γN = 0,
a
y
b
en
Γc
(12.2)
están inicialmente en contacto con tasa de
la ecuación (12.2) condiciona a éstos a permanecer
juntos o separarse, en modo alguno solaparse. Esto es, en caso de permanencia del
contacto los cuerpos se desplazarán de forma solidaria satisfaciendo la igualdad cinemática. Pero en caso de pérdida de contacto el desplazamiento del cuerpo
mayor que el de
a,
b
será
produciéndose como resultado la pérdida de contacto prescrita.
Cuando la expresión anterior se hace cumplir para todos los puntos de la región
de contacto y de manera continua en el tiempo, entonces la condición de impenetrabilidad se cumple de manera exacta. Sin embargo, cuando esta expresión sólo
CAPÍTULO 12.
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
101
se evalúa en instantes discretos de tiempo, como sucede en la gran mayoría de métodos numéricos, entonces no puede decirse que la condición de impenetrabilidad
se cumpla de manera estricta ya que el paso de tiempo empleado en la resolución
puede enmascarar interpenetraciones de puntos cercanos entre sí en los distintos
instantes considerados. Conviene advertir que la expresión (12.2) puede introducir
discontinuidades en la evolución temporal de los desplazamientos, ya que antes del
contacto los desplazamientos en la región de contacto de ambos sólidos serán distintas, igualándose a partir de la aparición del contacto. Este fenómeno introduce
complicaciones a la hora de proceder a la integración de las ecuaciones que rijan
el movimiento de los cuerpos involucrados en el contacto. Igualmente es importante resaltar que la condición de impenetrabilidad sólo es recomendable para puntos
que estén en contacto o en disposición de estarlo próximamente, dado el carácter
no integrable de la tasa de interpenetración en caso contrario. Por último, considerando la hipótesis de ausencia de fricción, no hay restricción alguna que regule los
desplazamientos tangenciales en
Γc .
Además de las condiciones cinemáticas enunciadas en el anterior epígrafe, otras
cinéticas han de satisfacerse en la región de contacto. Concretamente, la suma de
los esfuerzos existentes en la región de contacto ha de ser nula, ecuación (12.3).
ta + tb = 0
Descomponiendo los esfuerzos en la supercie de contacto
(12.3)
Γc
de manera análoga
a la efectuada para desplazamientos en la ecuación (12.1), se obtiene (12.4):
ta = taN · eaN + taT · eaT
,
tb = tbN · ebN + tbT · ebT
(12.4)
Por tanto, con las ecuaciones (12.3), (12.4) y adoptando la hipótesis de ausencia
de adhesión (por la que las tensiones normales en la región de contacto sólo podrían
ser de compresión), aplicando la condición de equilibrio sobre las componentes normal y tangencial se obtienen las ecuaciones (12.5) y (12.6) respectivamente.
CAPÍTULO 12.
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
102
taN + tbN = 0
en
Γc
(12.5)
taT + tbT = 0
en
Γc
(12.6)
Las condiciones cinemáticas y cinéticas anteriormente enunciadas ((12.2), (12.5)
y (12.6)) pueden ser combinadas en una única ecuación, la condición unitaria de
contacto (12.7).
tN · γn = 0
(12.7)
Ésta expresa que las fuerzas de contacto no realizan trabajo ya que: cuando
tN > 0
cero,
la tasa de interpenetración es nula; y cuando ésta toma valores distintos de
tN = 0
por no existir contacto.
Tal como se ha anticipado con la condición de impenetrabilidad, en principio no
es posible la interferencia entre las supercies de dos cuerpos en contacto. Sin embargo, esta condición puede ser demasiado brusca para ser implementada en métodos
numéricos de cálculo, fundamentalmente debido a las discontinuidades inducidas en
la evolución temporal de los desplazamientos y a las dicultades de integración que
presenta
γN .
Por este motivo es común relajar la condición permitiendo un cierto
solapamiento entre las supercies en contacto, ver gura 12.3.
Deniendo la interpenetración como la mínima distancia entre el punto
y la supercie del cuerpo
punto situado en
b
b, Γb , la distancia que separa el punto P
de cualquier otro
viene dada por la siguiente expresión
p
lP b = xb (eb , t) − xP (ea , t) = (xb − xP )2 + (y b − y P )2 + (z b − z P )2
donde
ea
y
eb
P ∈ Γa
(12.8)
hacen referencia al sistema local de coordenadas situado en la
supercie de los cuerpos
a
y
b
respectivamente. La interpenetración será por tanto,
según reeja la ecuación (12.9), la mínima distancia entre
P
y la supercie de
b
CAPÍTULO 12.
103
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
­b
eb
P
gN(xP) > 0
ea
­a
Figura 12.3: Penetración
cuando
P
esté dentro del cuerpo
b.
Si
P
estuviera fuera del cuerpo
b
no existiría
interpenetración ya que no se daría contacto.
xb (eb , t) − xP (ea , t)
gN (e, t) =
0
si
b
x (eb , t) − xP (ea , t) · na ≤ 0
(12.9)
en otro caso
Es importante observar que el punto de mínima distancia es la proyección ortogonal desde el punto
P
a la supercie del cuerpo
b. No obstante, la conjetura es válida
cuando la geometría de los sólidos en contacto es suave, pues en caso de producirse
interferencia con algún cuerpo de contorno anguloso la máxima interpenetración ya
no coincidirá con la proyección ortogonal desde el punto
P
a la supercie de
b,
ver
CAPÍTULO 12.
104
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
por ejemplo la gura 12.4.
­b
eb
P
ea
­a
Figura 12.4: Penetración en arista
Habiendo relajado la condición de impenetrabilidad de forma que se admita un
cierto grado de solapamiento entre los sólidos involucrados en el contacto para evitar
restricciones demasiado bruscas en los métodos numéricos, es preciso asociar una
fuerza normal que dependa de la interpenetración de los cuerpos,
gN ,
de forma que
cuanto mayor sea la interpenetración la fuerza asociada a ésta aumente también.
Según este tipo de penalización y de acuerdo con la deducción hecha por Belytschko
en [BLM00] para el método del
penalty,
las fuerzas normales en la supercie de
contacto pueden expresarse como (12.10):
taN + p = 0
,
tbN − p = 0
(12.10)
Entre las diversas posibilidades de denición de la fuerza de penalización
p
in-
troducida por la interferencia entre cuerpos, la más general es la siguiente
p = (β1 gN + β2 γN ) · H(gN + γN )
siendo H la función escalón de Heaviside
(12.11)
CAPÍTULO 12.
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
1
H(x) =
0
si
105
x≥0
(12.12)
en otro caso
Las ecuaciones que describen la dinámica de un sistema discreto en el que se haya
implementado el método del
penalty
pueden expresarse según la forma deducida en
[BLM00]:
Mü + q + fc = f
En esta expresión (12.13),
discreto;
q
M hace referencia a la matriz de masas del sistema
a las fuerzas internas del sistema;
fc
sobre el sistema y; nalmente,
penalty.
(12.13)
f
a las fuerzas externas que actúan
introduce el efecto de las fuerzas de contacto o
De manera general, este último término puede ser expresado del siguiente
modo
fc = β1 H(gN )GT Gx + β2 H(γN )GT Gẋ
(12.14)
Sin embargo, por la condición de impenetrabilidad (12.2), la penalización (12.14)
puede reducir su dependencia únicamente a la interpenetración
fc = βH(gN )GT Gx
gN
según
(12.15)
Por tanto, en el caso particular del contacto dinámico catenaria-pantógrafo, la
interpenetración entre ambas supercies será equivalente al de un resorte de constante
β
intercalado entre la catenaria,
xc , y el pantógrafo, xp , según el vector G que
dene el contacto como se expresa en (12.16):
gn = Gx =
1 −1
xp
= xp − xc
(12.16)
xc
Por tanto puede decirse que este método presenta dos importantes ventajas: por
un lado su implementación es muy simple, dado que se reduce a insertar un resorte
CAPÍTULO 12.
FORMULACIÓN DEL CONTACTO CATENARIA-PANTÓGRAFO
de característica
β
106
entre los sólidos que puedan estar en contacto y; por otro lado,
el segundo aspecto favorable radica en la no introducción de variables adicionales.
Es importante observar que las fuerzas de contacto no se calculan de manera
exacta al emplear el método del
mático, el parámetro
β
penalty.
Desde un punto de vista puramente mate-
ha de tender a innito para que la aproximación sea lo más
precisa posible, ya que el efecto de la penalización consiste en relajar la condición
de impenetrabilidad. Cuanto mayor sea
β , más cercano a la realidad será el compor-
tamiento del sistema. Sin embargo, valores excesivamente elevados pueden originar
serios problemas de condicionamiento de la matriz de rigidez, lo cual afecta de forma
signicativa a la convergencia del método numérico empleado en la resolución del
sistema de ecuaciones diferenciales obtenido. Esto constituye el principal inconveniente del método, ya que la solución obtenida depende enormemente del valor de
penalización elegido. Para solventar este problema se han desarrollado numerosos
algoritmos de actualización del
penalty, de forma que en cada paso de tiempo se em-
plee el valor más apropiado logrando un compromiso entre exactitud de la solución
y facilidad de resolución numérica. En [Cha02] puede consultarse por ejemplo una
propuesta de
penalty
adaptativo en función del valor que tome la interpenetración
gN .
taN = −p = −φ(gna )βna
ga
n
a
a )2
(gn
φ(gna ) =
+ g2n + β4
4β
0
(12.17)
si
gna ≤ −β
si
kgna k < β
en otro caso
(12.18)
Capítulo 13
Integración temporal
Un modelo de elementos nitos de dinámica estructural discretiza las ecuaciones
diferenciales que representan el comportamiento de un sistema físico. Éste tipo de
modelos simula exactamente el comportamiento de los modos de baja frecuencia
del sistema. Sin embargo, su contenido de alta frecuencia suele ser dominado por la
inuencia numérica resultante de la discretización de los elementos nitos. Debido a
esto, el sistema de ecuaciones es
sti, concepto denido y ampliamente discutido por
Hairer y Wanner en [HW91]. Por tanto, la discretización en el tiempo y la denición
de un método de integración es un aspecto de enorme relevancia en la simulación
dinámica de estructuras exibles.
El formato tradicional del sistema de ecuaciones de partida que se encuentra en
la bibliografía sobre algoritmos de integración temporal es de primer orden y se rige
por la expresión general 13.1:
ẏ = f (y, t)
siendo
(13.1)
f , en general, una función no lineal de las variables (y(t),t). No obstante,
el sistema de ecuaciones diferenciales que gobierna dinámica de un sistema se expresa
en forma matricial compacta:
M · ü = q (u, u̇, t)
107
(13.2)
CAPÍTULO 13.
108
INTEGRACIÓN TEMPORAL
donde el vector
q y la matriz M son en general funciones no lineales de (u, u̇, t).
Es sencillo comprobar que el sistema 13.2 puede plantearse como un caso particular
del 13.1 sin más que redenir el vector incógnita, mediante el cambio:
y=
nuo
u̇
= f (y, t)
ẏ =
−1
M · q (u, u̇, t)
tal que
u̇
un método numérico de integración temporal calcula secuencialmente valores de
la incógnita
{yn /n = 0, 1, . . . , N }
El cálculo de
espaciados mediante intervalos
hn+1 = tn+1 − tn .
y en cada instante se realiza a partir de su valor en k instantes previos
de tiempo. El número
k
es lo que se conoce como el número de pasos del integrador.
En consecuencia, el valor de
yn+k
se calcula a partir de los
k
valores anteriores de
y con la expresión general [Lam91]:
k
X
αj yn+j = hφf (yn+k ,yn+k−1 ,...,yn ,tn+k ;hn+k )
(13.3)
j=0
donde se ha usado el subíndice
zar que la dependencia de
φ
con
f
en la función del segundo miembro para enfati-
yn+k , . . . , yn , tn+k ; hn+k
es a través de la función
f (y, t).
Pueden clasicarse los métodos dados por la expresión 13.3 en base a diferentes
criterios:
Métodos de un paso / Métodos multipaso. En los de un paso,
el cálculo de
yn+1
k = 1. Es decir,
se realiza haciendo uso exclusivamente de información del
paso anterior. En los multipaso se requiere, sin embargo, un número
k > 1
de valores iniciales para arrancar, utilizando habitualmente información de los
valores anteriores. En cambio, suelen tener una estructura más simple que los
de un paso para una precisión similar. Entre los métodos de un paso destacan la familia Newmark, cuya formulación original fue propuesta en [nN59],
y otros algoritmos desarrollados a partir de la formulación de Newmark como
el Hilber-Hughes-Taylor [HHT77] y el
α-generalizado
de Chung y Hulbert
[CH93]. Otros métodos como los Runge-Kutta son también ampliamente re-
CAPÍTULO 13.
109
INTEGRACIÓN TEMPORAL
conocidos, aunque esta proyecto no profundizará en ellos. Tampoco en otros
multipaso como por ejemplo los métodos lineales, en los que la expresión 13.3
es lineal en
yn+j , f yn+j , tn+j ; j = 0, 1, . . . , k
.
Métodos explícitos / Métodos implícitos. En un método explícito, la expresión
13.3 permite despejar
yn+1 conocidos los valores yn+j ; j = 0, 1, . . . , k − 1
; si
esto no es posible, el método es implícito. Es preciso destacar que la estabilidad
de un método explicito sólo puede ser garantizada si el paso de tiempo elegido
es sucientemente pequeño respecto a las frecuencias naturales del sistema.
Mientras que los métodos implícitos comúnmente empleados son incondicionalmente estables (o A-estables), lo cual signica que la solución numérica
será estable cualquiera que sea el contenido en frecuencias del sistema mecánico. Esta propiedad se antoja muy deseable en la simulación de sistemas
sti,
siendo la mayor complejidad computacional que requieren los métodos
implícitos el precio que hay que pagar por ello.
Esta clasicación no es internamente excluyente entre sí, puesto que tanto los
métodos de un paso como los multipaso pueden ser explícitos o implícitos, e incluso
pueden construirse algoritmos que combinen un método explícito con uno implícito
(algoritmos predictor-corrector). De acuerdo con Hughes en [Hug87], puede decirse
que un método de integración temporal para dinámica estructural debería cobinar
las siguientes propiedades: estabilidad incondicional para sistemas lineales, no más
de un sistema de ecuaciones implícitas a resolver en cada paso, precisión de segundo orden, control de la disipación numérica en los modos de alta frecuencia e
inicialización autónoma.
En los siguientes epígrafes se presenta el algoritmo original de Newmark [nN59] y
la extensión
α-generalizado
propuesta por Chung y Hulbert en [CH93] así como las
adaptaciones particulares desarrolladas en esta proyecto para al cálculo dinámico
de la interacción catenaria-pantógrafo.
CAPÍTULO 13.
110
INTEGRACIÓN TEMPORAL
13.1. La familia β -Newmark
De amplia utilización en la dinámica estructural, la familia
β -Newmark
está
especialmente diseñada para la resolución de sistemas de segundo orden, por lo que
se aplica a las ecuaciones con el formato dado en 13.2. El término `familia' viene
del hecho de que su planteamiento más general tiene dos parámetros (γ y
β)
cuya
variación genera todos los distintos métodos de la familia.
La formulación clásica proporciona la posición y la velocidad en el instante (n+1)
a partir de la posición y velocidad en (n) y de la aceleración en (n
+ 1).
Partiendo
del desarrollo en serie de Taylor de desplazamientos y velocidades respecto al paso
de tiempo
h
se obtienen las expresiones 13.4:
un+1 = un + hu̇n + h2
1
2
−β
ün + h2 β ün+1
(13.4)
u̇n+1 = u̇n + h (1 − γ) ün + hγ ün+1
siendo
γ
y
β
los parámetros numéricos que dan lugar a los distintos métodos.
Mediante la combinación de estos parámetros puede observarse que en régimen lineal
los métodos de la familia en los que
β≥
1
16
+
γ 2 +γ
4
y
γ≥
1
son incondicionalmente
2
estables.
Los métodos más representativos obtenidos para distintos valores de
γ
y
β
son
presentados por Geradin y Rixen en [GR97] con el estudio de un sistema `patrón'.
Como conclusión general del análisis de estos métodos puede decirse que todos salvo
la regla trapezoidal y la regla trapezoidal modicada tienen un interés limitado, ya
que son inestables o condicionalmente estables incluso en el régimen lineal.
La regla trapezoidal se obtiene para
γ=
1
2
y
β=
1
, y en el contexto de
4
la familia de Newmark se le llama también método de aceleración media constante,
ya que las expresiones 13.4 se pueden interpretar como actualizaciones en posición y
velocidad suponiendo una aceleración media constante entre tn y tn+1 . En el régimen
lineal, éste es además el método absolutamente estable más preciso. No obstante,
puede introducirse amortiguamiento numérico en la formulación según:
CAPÍTULO 13.
1
γ = +α
2
donde
α
111
INTEGRACIÓN TEMPORAL
y
1
β=
4
1
γ+
2
2
α≥0
(13.5)
es el parámetro de amortiguamiento numérico. Éste es el llamado mé-
todo de aceleración constante modicado o regla trapezoidal modicada. Permite
aumentar el amortiguamiento numérico en el sistema manteniendo la condición de
estabilidad en el algoritmo de integración, lo cual en ciertos casos puede ser muy
útil aún a costa de una degradación de la precisión. Géradin y Rixen presentan una
sistematización del algoritmo de Newmark para dinámica estructural en [GR97].
La resolución numérica sigue un algoritmo predictor-corrector partiendo de los
valores
un , u̇n y ün del instante tn , para cuya predicción inicial se asume aceleración
nula:
ü0n+1 = 0
u̇0n+1 = u̇n+1 + h (1 − γ) ün
u0n+1 = un + hu̇n + h2
1
2
−β
(13.6)
ün
llegando a satisfacer la formulación de Newmark 13.4 mediante las correcciones
iterativas:
u
Ɵn+1 =
1
∆ n+1
βh2
∆u̇n+1 =
γ
∆ n+1
βh
u
En el caso de la interacción dinámica catenaria-pantógrafo, la corrección
(13.7)
∆un+1
en cada paso de integración se calcula a través de la ecuación 13.8:
(i)
Kt∗(i) ∆u(i+1)
n+1 = Rn+1
cuyos cálculos previos del residuo
(13.8)
R y la matriz de rigidez tangente consistente
K∗t se expresan en 13.9:
R = Mün+1 + Cu̇n+1 + q − f
K∗t = Kt + βhγ C + βh1 2 M
(13.9)
CAPÍTULO 13.
donde
estático,
Kt
C
112
INTEGRACIÓN TEMPORAL
es la matriz de rigidez tangente calculada para un problema cuasi-
es la matriz de amortiguamiento y
M la matriz de masas.
13.2. El método α-Generalizado
La integración de ecuaciones algebraicas-diferenciales (DAE) puede conducir a
inestabilidad numérica cuando se usa un método de integración de la familia de
Newmark debido a las restricciones algebraicas, que se maniesta a través de oscilaciones crecientes en la respuesta en aceleraciones. Introduciendo una pequeña
disipación en el algoritmo para las altas frecuencias se logra controlar esta inestabilidad, manteniendo la estabilidad de la integración de dinámica lineal con restricciones. Destaca en este aspecto el método
α-generalizado
descrito por Chung
y Hulbert en [CH93]. Éste incluye como casos particulares algunos de los algoritmos de integración temporal más importantes en dinámica estructural, como el
algoritmo Hilber-Hughes-Taylor [HHT77], constituyendo así un marco general para
investigaciones teóricas.
El método se fundamenta en las fórmulas de Newmark 13.4, aunque para el
cálculo del residuo este algoritmo promedia la diferente contribución de dos instantes
consecutivos según los parámetros numéricos
αm
y
αf
como reeja 13.10:
R = (1 − αm ) M ün+1 + αm M ün + (1 − αf ) C u̇n+1 +
αf C u̇n + (1 − αf ) q n+1 − f n+1 + αf (q n − f n )
En particular, el algoritmo Hilber-Hughes-Taylor se obtiene para
αf ∈ 0, 31 .
No obstante, estos parámetros del método
calculados en función del radio espectral
αm =
Deniendo
en 13.12:
2ρu∞ − 1
ρu∞ + 1
α-generalizado
(13.10)
αm = 0
y
pueden ser
ρq∞ :
y
ρu
αf = u ∞
ρ∞ + 1
(13.11)
αf m = αf −αm , los parámetros de Newmark quedan como se muestra
CAPÍTULO 13.
113
INTEGRACIÓN TEMPORAL
1
γ = + αf m
2
y
1
β=
4
Demostrándose que incluso para valores de
1
γ+
2
αf m > 0
2
(13.12)
el método presenta una
precisión de segundo orden. La solución numérica se obtiene mediante un algoritmo
predictor-corrector como el empleado en la familia Newmark, quedando la matriz
tangente aumentada en cada paso corrector como reeja la ecuación 13.13, análoga
a la 13.9:
Kt∗ = (1 − αf ) Kt + (1 − αf )
1
γ
C + (1 − αm ) 2 M
βh
βh
(13.13)
Capítulo 14
Validación con la norma EN50318
La norma EN50318 [CEN99] fue aprobada el 1 de Abril de 2002. Esta versión
de la norma europea ha sido realizada por CENELEC a petición de la comisión
europea siguiendo la normativa de interoperatibilidad 96/48/EC. Para obtener el
certicado de comprobación EC para los elementos constituyentes de una línea de
contacto de transmisión de energía se necesita una simulación con un programa que
debe ser validado previamente por la norma EN50318.
Como especica la norma EN50318, capítulo 11,el primer paso de la validación
de un código debe ser la comparación con un modelo de referencia, ver Figura 14.1,
para tener conanza en la precisión de la simulación. Si los resultados están dentro
del rango señalado en la norma EN50318, Tabla 14.1, el método de simulación puede
usarse para validar el código mediante la comparación con resultados medidos en
líneas de alta velocidad. Para ello, las medidas deben haberse realizado de acuerdo
a la norma EN50317.
La tabla 14.1 muestra el rango de resultados admisibles en la simulación de la
catenaria EN50318, así como los resultados obtenidos con el modelo presentado en
este proyecto. Además, de acuerdo con la norma EN50318, sección 3.17 y apéndice
A.3, el máximo desplazamiento se debe calcular en los apoyos de los vanos 5 y 6.
Los resultados obtenidos se muestran a continuación en las guras 14.2 y 14.3 a
250 km/h y en las guras 14.4 y 14.5 a 300 km/h.
114
CAPÍTULO 14.
115
VALIDACIÓN CON LA NORMA EN50318
1.8
1.6
1.4
1.2
Height [m]
1
0.8
0.6
0.4
0.2
0
−0.2
0
60
120
180
240
300
Length [m]
360
420
480
540
600
Figura 14.1: Catenaria de referencia EN50318 (10 vanos)
En cada gura se representan conjuntamente los cuatro vanos centrales con la
fuerza y los desplazamientos superpuestos en cada gráca. Por ello, se ha aplicado la
misma escala en el eje de abscisas mientras la misma varía en el eje de ordendas para
poder observar los resultados sin problemas. Para terminar, remarcar que todas las
unidades usadas siguen el sistema internacional: longitudes y desplazamientos en
[m], fuerzas de contacto en [N] y tiempo en [s].
Los resultados de la simulación se encuentran dentro del rango admisible cumpliendo los requisitos de la norma EN50318.
CAPÍTULO 14.
116
VALIDACIÓN CON LA NORMA EN50318
Velocidad
Rango de frecuencias 20Hz
Fuerza media de contacto
Desviación típica (σ)
Máx. estad. de fuerza
Mín. estad. de fuerza
Máx. fuerza de contacto
Mín. fuerza de contacto
Máx. despl. del apoyo 5
Máx. despl. del apoyo 6
Máx. despl. del apoyo 7
% de pérdida de contacto
250 km/h
Rango Admis. Simulación
110 N - 120 N 116.07 N
26 N - 31 N
27.38 N
190 N - 210 N 198.20 N
20 N - 40 N
33.91 N
175 N - 210 N 177.57 N
50 N - 75 N
60.05 N
48 mm - 55 mm 53.4 mm
48 mm - 55 mm 51.9 mm
48 mm - 55 mm 53.0 mm
0%
0%
300 km/h
Rango Admis. Simulación
110 N - 120 N 115.35 N
32 N - 40 N
33.64 N
210 N - 230 N 216.27 N
-5 N - 20 N
14.44 N
190 N - 225 N 210.35 N
30 N - 55 N
40.87 N
55 mm - 65 mm 62.7 mm
55 mm - 65 mm 63.1 mm
55 mm - 65 mm 62.0 mm
0%
0%
Tabla 14.1: Validación con el modelo de referencia
Time [s]
2.592
3.024
3.456
3.888
4.32
4.752
5.184
5.616
0.08
1.9
0.06
1.6
0.04
1.3
0.02
1
0
0.7
−0.02
0.4
−0.04
Mast 5
Mast 6
Mast 7
Pantograph
0.1
−0.2
180
210
240
270
300
Distance [m]
330
360
390
Uplift [m]
Height [m]
2.16
2.2
−0.06
−0.08
420
Figura 14.2: Geometría y desplazamiento en los vanos centrales a 250 km/h
Height [m]
180
2.5
117
VALIDACIÓN CON LA NORMA EN50318
210
240
270
300
330
360
390
420
180
2.2
160
1.9
140
1.6
120
1.3
100
1
80
0.7
60
0.4
40
0.1
20
Contact force [N]
CAPÍTULO 14.
Contact force
−0.2
180
210
240
270
300
Distance [m]
330
360
390
0
420
Figura 14.3: Geometría y fuerza de contacto en los vanos centrales a 250 km/h
Time [m]
2.16
2.52
2.88
3.24
3.6
3.96
4.32
4.68
0.08
1.9
0.06
1.6
0.04
1.3
0.02
1
0
0.7
−0.02
0.4
−0.04
Mast 5
Mast 6
Mast 7
Pantograph
0.1
−0.2
180
210
240
270
300
Distance [m]
330
360
390
Uplift [m]
Height [m]
1.8
2.2
−0.06
−0.08
420
Figura 14.4: Geometría y desplazamiento en los vanos centrales a 300 km/h
Height [m]
2.3
118
VALIDACIÓN CON LA NORMA EN50318
200
250
300
350
400
220
2
190
1.7
160
1.4
130
1.1
100
0.8
70
0.5
40
0.2
10
Contact force [N]
CAPÍTULO 14.
Contact force
−0.1
180
210
240
270
300
Distance [m]
330
360
390
−20
420
Figura 14.5: Geometría y fuerza de contacto en los vanos centrales a 300 km/h
Capítulo 15
Conclusiones
En esta segunda parte se propone un nuevo método para simulación de la interacción dinámica pantógrafo-catenaria. Las aportaciones más relevantes que se han
llevado a cabo se pueden separar en tres aspectos:
Se ha implementado el efecto del pandeo en las péndolas mediante la denición
de una rigidez variable. Esto conere un tratamiento más realista del sistema
de cables abordado.
La simulación de la interacción dinámica catenaria-pantógrafo se ha desarrollado con un modelo de elementos nitos empleando una formulación corotacional para los hilos sustentador y de contacto.
Para la integración numérica de la evolución dinámica del sistema se ha implementado el método
α-generalizado que ha permitido incrementar la estabilidad
de la solución ltrando las vibraciones de alta y muy alta frecuencia.
Frente a todo lo publicado anteriormente al respecto en la literatura cientíca,
este modelo sí ha sido validado mediante lo propuesto en la norma de validación
europea EN50318 [CEN99]. Los resultados obtenidos se encuentran dentro de los
margenes de aceptación establecidos en dicha norma, por lo que es apto para la
certicación ocial de catenarias de alta velocidad.
119
Parte III
Reducción Dinámica mediante Física
Multicuerpo
120
121
Dado al elevado tiempo de computación del método presentado en la parte anterior, se ha desarrollado un método reducido para obtener soluciones aproximadas de
la fuerza de contacto de la interacción catenaria pantógrafo. Este método se apoya
en el uso de la física multicuerpo para aplicar una jerarquía variable de modelos a
cada cuerpo (vano a vano en este caso) y que depende de si la respuesta dinámica de los cuerpos se comporta de manera lineal o de manera no lineal. Esta parte
está estructurada de la siguiente manera: En primer lugar se expone una revisión
de las técnicas multicuerpo, 16. A continuación, los capítulos 17, 18 y 19 presentan la formulación que permitirá reducir el tamaño del problema de interacción
pantógrafo-catenaria sin perder precisión. El capítulo,20 muestra el resultado de la
implementación del método propuesto y presenta los resultados obtenidos. Por último, el capítulo 15 presenta brevemente las conclusiones del trabajo. Las referencias
empleadas en el desarrollo del trabajo serán presentadas en orden alfabético al nal
del documento.
Capítulo 16
Estado del arte
Para poder simular un mecanismo compuesto por cuerpos rígidos conectados
por uniones cinemáticas deben obtenerse las ecuaciones que denan su movimiento.
Existen dos métodos fundamentales para ello: la formulación Newton-Euleriana y
la formulación Lagrangiana. Las ecuaciones de Newton-Euler provienen de la aplicación de las leyes del movimiento a cada cuerpo, aplicando el principio de acción y
reacción a fuerzas y pares. De acuerdo con el principio de D'Alembert, las reacciones
pueden aparecer como fuerzas aplicadas en cada cuerpo y que éstos tan sólo estén
relacionados por ligaduras algebraicas.
La formulación lagrangiana [DJB94] describe un sistema dinámico en términos
de trabajo y energía usando coordenadas generalizadas, e.g. coordenadas relativas
o cartesianas. Si las coordenadas generalizadas son independientes, las reacciones y
los momentos se eliminan automáticamente, con lo que se deriva un sistema compacto de ecuaciones del movimiento. Para modelar uniones cinemáticas se deben
utilizar restricciones denominadas multiplicadores de Lagrange como se estudiará
más adelante.
Para modelar mecanismos compuestos por cuerpos exibles, debe aplicarse sobre dichos cuerpos alguna técnica de discretización. Como se ha desarrollado en la
parte anterior, uno de los métodos más utilizados es la formulación por elementos
nitos. Aplicando una formulación lagrangiana se pueden encontrar multiplicado-
122
CAPÍTULO 16.
ESTADO DEL ARTE
123
res de Lagrange para enlazar los diferentes cuerpos y modelar mecanismos exibles
[GC01].
La formulación moderna de la mecánica multicuerpo permite obtener una representación detallada y able de sistemas mecánicos complejos. No obstante, la
consecución de alta precisión tan sólo puede hacerse a costa de algoritmos más
sosticados que requieren un mayor esfuerzo computacional. Por ello, Eberhard y
Schiehlen presentan en [ES98] un modelado jerárquico de diferentes modelos para
conseguir la precisión adecuada en cada cuerpo.
Dependiendo de si el comportamiento de un cuerpo exible es lineal o no lineal,
los modelos disponibles para analizarlos pueden ser diferentes. Existen técnicas muy
maduras de bases reducidas para estructuras con comportamiento lineal. No obstante, para cuerpos no lineales es preferible usar modelos completos de elementos
nitos. Una reducción lineal transforma un modelo original en un modelo de orden
reducido minimizando la pérdida de precisión. En sistemas dinámicos lineales suelen utilizarse técnicas de descomposición modal que serán presentadas de forma más
detallada en este capitulo. De Fonseca [DF00] ha realizado interesantes estudios en
este campo y las ha aplicado a la dinámica estructural.
Capítulo 17
Frecuencias naturales y modos de
vibración
Discretizando las ecuaciones del movimiento por elementos nitos en un cuerpo
cuyo comportamiento es no lineal se obtiene que
M ü + C u̇ = f − q
donde
u
(17.1)
representa los desplazamientos en cada una de los grados de libertad del
problema. En problemas con una discretización espacial de tamaño medio, el tamaño
de las matrices
M ,C
y la matriz tangente de
q , Kt , puede llegar a ser relativamente
grande y los tiempos de ejecución demasiado elevados al realizar análisis dinámicos.
Por ello, cuando se puede asumir un comportamiento lineal, se utilizan modelos
reducidos que aproximan el fenómeno físico con un menor número de ecuaciones. El
método más conocido de obtención de bases reducidas es la superposición modal,
ya que, además de reducir el sistema, aporta información muy útil para evitar
problemas de resonancia. No obstante, este método tan sólo es válido si el sistema
se comporta de una manera lineal y los coecientes de las matrices de masa
y rigidez
Kt
M
son constantes. Por ello, si un problema de naturaleza no lineal se
abordara con esta técnica, se habría de linealizar la ecuación (17.1) en el entorno
del punto de equilibrio
u0 . Expandiendo la ecuación mediante una aproximación de
124
CAPÍTULO 17.
125
FRECUENCIAS NATURALES Y MODOS DE VIBRACIÓN
Taylor de primer orden
M ü + C u̇ + Kt (u0 ) (u − u0 ) + q (u0 ) = f
(17.2)
o, lo que es lo mismo,
M ü + C u̇ + Kt (u0 ) u = f − q (u0 ) + Kt (u0 ) u0
M, C
y
Kt
serán válidas siempre que la posición de equilibrio dinámico,
demasiado alejada de la posición de equilibrio estático,
(17.3)
u, no esté
u0 .
Al analizar las frecuencias naturales y los modos de vibración de un sistema
mecánico, realmente se estudia su respuesta libre sin amortiguamiento; esto es, sin
que existan fuerzas exteriores aplicadas ni fuerzas dependientes de la velocidad, por
lo que las ecuaciones del movimiento quedarán reducidas a
M ü + Kt (u0 ) u = 0
Se asumirá que dichas respuestas son del tipo
compleja,
u = χϕ eiωt
ϕ es un vector de constantes reales y eiωt
(17.4)
donde
χ es una constante
indica la notación de Euler para
la exponencial compleja. Dicho cambio, desarrollando la parte compleja, quedará
expresado como
u = αϕ ei(ωt−δ)
donde
α
es una constante real y
δ
(17.5)
un desfase en tiempo. Derivando dos veces la
ecuación (17.5) con respecto al tiempo se obtiene que
ü = −ω 2 αϕ ei(ωt−δ) = −ω 2 u
(17.6)
y sustituyendo (17.5) y (17.6) en la ecuación de movimiento (17.4) resulta
−ω 2 M + Kt (u0 ) ϕα ei(ωt−δ) = 0
Eliminando el escalar
α ei(ωt−δ)
(17.7)
se deduce que
−ω 2 M + Kt (u0 ) ϕ = 0
(17.8)
CAPÍTULO 17.
126
FRECUENCIAS NATURALES Y MODOS DE VIBRACIÓN
lo cual dene un problema de autovalores generalizado. Dicho problema trata de
encontrar los vectores
ϕ
que, tomando
λ = ω2,
veriquen que
Kϕ = λM ϕ
(17.9)
Para que existan soluciones diferentes a la trivial, el sistema debe ser indeterminado.
Por eso, un método para hallar los autovalores del sistema consiste en buscar aquéllos
que cumplan
det
−ω 2 M + Kt (u0 ) = 0
(17.10)
La expresión (17.10) se denomina ecuación característica. Si los problemas son pequeños, se buscan las raíces de dicha ecuación característica con lo que se obtienen
los autovalores
λi
y sus autovectores asociados
ϕi .
En caso de que los sistemas
sean mayores, se utilizan algoritmos que obtienen todos estos autovalores o parte
de ellos. De esta forma se obtiene un sistema reducido con tan solo la información
de las frecuencias útiles.
Los valores
tovectores,
ϕi ,
ωi =
√
λi
se denominan frecuencias propias del sistema y los au-
son los modos de vibración asociados a las frecuencias
ωi
. Éstas
representan las frecuencias de vibración de las posibles soluciones armónicas del
sistema.
17.1. Frecuencias propias en catenarias ferroviarias
Pese a la no linealidad de las estructuras de cables, se realizan a menudo análisis
modales para su estudio. Al conocer las frecuencias naturales de vibración se pueden evitar problemas de resonancia muy peligrosos para la estabilidad de cualquier
estructura.
Para mostrar la forma de los diferentes modos de vibración, se ha realizado un
análisis modal sobre la catenaria denida por la norma EN50318 representada en
la gura 17.1. La tabla 17.1 presenta la sensibilidad que presentan las frecuencias
naturales de dicha catenaria al mallado. El número de elementos se dene como el
CAPÍTULO 17.
FRECUENCIAS NATURALES Y MODOS DE VIBRACIÓN
127
Figura 17.1: Catenaria denida por la norma EN50318
número de divisiones introducidas entre péndolas en el hilo de contacto. Se observa
que el mallado no afecta en las frecuencias más bajas y tan sólo de forma leve en a
partir de la décima. Por ello, para recoger el comportamiento lineal a baja frecuencia
no será necesario un modelo con una malla muy na.
Los cuatro primeros modos se muestran en las guras 17.2,17.3,17.4 y 17.5. Puede
comprobarse cómo gran parte de la información dinámica se recoge en relativamente
pocos modos de vibración.
Figura 17.2: Modo de vibración 1 (1.0182 Hz)
CAPÍTULO 17.
128
FRECUENCIAS NATURALES Y MODOS DE VIBRACIÓN
2
4
6
8
10
12
14
16
18
20
Modo 1
1.07
1.07
1.07
1.08
1.09
1.10
1.11
1.13
1.15
1.16
Modo 2
2.14
2.13
2.14
2.16
2.17
2.19
2.22
2.25
2.28
2.32
Modo 3
3.21
3.20
3.21
3.23
3.26
3.29
3.32
3.36
3.41
3.46
Modo 4
4.29
4.27
4.28
4.30
4.34
4.37
4.42
4.47
4.52
4.59
Modo 5
5.37
5.34
5.35
5.38
5.42
5.46
5.51
5.57
5.64
5.71
Modo 6
6.45
6.42
6.42
6.45
6.49
6.54
6.60
6.67
6.74
6.82
Modo 7
7.49
7.48
7.48
7.51
7.55
7.60
7.67
7.73
7.81
7.89
Modo 8
8.46
8.51
8.51
8.54
8.57
8.62
8.67
8.72
8.78
8.83
Modo 9
9.32
9.65
9.64
9.66
9.67
9.71
9.77
9.84
9.91
9.99
Modo 10
10.06
9.88
9.70
9.67
9.72
9.77
9.83
9.90
9.98
10.06
Modo 11
10.72
9.90
9.74
9.71
9.73
9.78
9.86
9.94
10.03
10.13
Modo 12
11.32
9.94
9.82
9.79
9.82
9.87
9.93
10.01
10.09
10.19
N. de elem.
Tabla 17.1: Sensibilidad del mallado de las frecuencias naturales
Figura 17.3: Modo de vibración 3 (3.0555 Hz)
CAPÍTULO 17.
FRECUENCIAS NATURALES Y MODOS DE VIBRACIÓN
Figura 17.4: Modo de vibración 5 (5.0938 Hz)
Figura 17.5: Modo de vibración 7 (7.1341 Hz)
129
Capítulo 18
El método de la superposición modal
La linealidad de la ecuación (17.4) implica también la linealidad de sus soluciones. Por lo tanto si
u1
y
u2
son soluciones de (17.4),
νu1 + µu2
también lo será.
Por ello, la solución más general al sistema lineal anterior vendrá dada como una
combinación lineal de sus soluciones del tipo
u = α1 ϕ1 ei(ωt−δ) + α2 ϕ2 ei(ωt−δ) + · · · + αn ϕn ei(ωt−δ)
n
P
αk ϕk ei(ωk t−δk )
=
(18.1)
k=1
Dicha solución general se puede interpretar como la suma de
brando a su frecuencia natural
ωk
con una amplitud
n
modos
ϕk
vi-
αk . El sistema completo tendrá
tantos modos de vibración como grados de libertad tenga el sistema original. No
obstante, cada uno de estos modos contendrá la información relativa a la frecuencia
propia con la que esté relacionado. Por ello, es posible reducir el tamaño original
del sistema tomando tan sólo las frecuencias que interesen en el estudio concreto
que se realice siempre que dicho sistema se comporte de manera lineal.
Denominando
ϕki
a la componente
i
del vector propio
ϕk
y siendo
j=
√
−1,
se
puede reescribir la ecuación (18.1) como
ui =
n
X
αk ϕki ej(ωk t−δk )
k=1
130
(18.2)
CAPÍTULO 18.
131
EL MÉTODO DE LA SUPERPOSICIÓN MODAL
Un sistema de coordenadas normales asociadas al problema inicial se dene como
ξ (t) = αk ej(ωk t−δk )
y, sustituyendo en (18.2), se obtiene lo que se puede interpretar como un cambio
de coordenadas: de grados de libertad asociados a los desplazamientos y giros, a la
base de coordenadas normales. Esto queda expresado de la siguiente manera
ui (t) =
n
X
ϕki ξk (t)
(18.3)
k=1
donde las componentes
ϕki
de la ecuación (18.3) constituyen la matriz de cambio
de base
φ = (ϕ1 , ϕ2 , · · · , ϕn ) =
ϕ11
ϕ12
.
..
ϕ1n
ϕ21
ϕ22
.
..
ϕ2n
· · · ϕn1
· · · ϕn2
. .
. . ..
···
ϕnn
(18.4)
con la que, expresando matricialmente la ecuación (18.3), se puede escribir
u = φξ
(18.5)
o lo que es lo mismo,
u (t) = ξ1 (t) ϕ1 + ξ2 (t) ϕ2 + · · · + ξn (t) ϕn
Al aplicar este cambio de coordenadas al sistema de ecuaciones (17.3) se obtiene
M φξ̈ + Kφξ = 0
y, premultiplicando por la transpuesta de la matriz de cambio de base,
φT ,
φT M φ ξ̈ + φT Kφ ξ = 0
se obtiene el sistema de ecuaciones del movimiento denido en coordenadas normales
M̃ ξ̈ + K̃ ξ = 0
CAPÍTULO 18.
132
EL MÉTODO DE LA SUPERPOSICIÓN MODAL
en el que las matrices características del sistema
M̃
y
K̃
son matrices diagonales
por las propiedades de ortogonalidad de los modos respecto a las matrices
Este cambio de base es aplicable a las fuerzas,
Con esto se le asigna a
f˜
la aportación de
f
f,
M
y
K.
que actúan sobre el sistema.
a cada modo y frecuencia propia.
Un sistema con oscilaciones forzadas no amortiguado en el sistema de coordenadas
normales quedaría denido por:
M̃ ξ̈ + K̃ ξ = φT f = f˜
Este cambio, sin embargo, no es aplicable a la matriz de amortiguamiento
que no es posible lograr una diagonalización simultanea de
M ,C
y
Kt .
C
ya
Por ello,
para añadir el amortiguamiento, se utiliza la hipótesis de Rayleigh, que considera
la matriz de amortiguamiento proporcional a la matriz de masas y a la matriz de
rigidez.
Entonces, siendo
C̃ = αK̃t + β M̃ ,
el sistema con oscilaciones forzadas y amor-
tiguado en coordenadas normales quedaría expresado como:
M̃ ξ̈ + C̃ ξ̇ + K̃ ξ = f˜
(18.6)
Utilizando la ecuación (18.6) se puede estudiar el sistema reducido y obtener
información del sistema completo usando el cambio de variables (18.4). De este
modo se pasa del sistema de ecuaciones (17.1) de tamaño
tamaño
m,
n
a un sistema (18.6) de
siendo éste el número de modos utilizados y mucho menor que
n.
18.1. Condiciones iniciales
Para utilizar la superposición modal en el resolución de problemas estructurales
es preciso evaluar los
2n
coecientes
α0
y
δ0
de la ecuación (17.5) o, lo que es lo
mismo, las condiciones iniciales en coordenadas modales
ξ (t = 0)
ξ̇ (t = 0).
Para
(u0 , u̇0 ), para poder
reducidas,
ξ0 , ξ̇0 . La
ello se utilizarán las condiciones iniciales del modelo completo,
incorporar unas condiciones iniciales al modelo en bases
y
CAPÍTULO 18.
EL MÉTODO DE LA SUPERPOSICIÓN MODAL
133
expresión (17.5) expresada sin notación de Euler es
X
u=
αk ϕk cos (ωk t − δk )
(18.7)
k
que, desarrollando el coseno de la suma, queda expresada como
u=
X
αk ϕk cosδk cosωk t +
X
k
αk ϕk senδk senωk t
(18.8)
k
Por otro lado, la derivada de la expresión (18.7) es
u̇ =
X
−αk ϕk ωk sen (ωk t − δk )
(18.9)
k
Estas expresiones, particularizadas para
u0 =
X
u̇0 =
X
t = 0,
se transforman en
αk ϕk cosδk
k
αk ϕk ωk senδk
(18.10)
k
y en coordenadas modales
u0 = φξ 0
u̇0 = φξ̇ 0
(18.11)
Premultiplicando ambas ecuaciones (18.11) por
ξ0 = M̃
ξ̇0 = M̃
−1
−1
φT M
resulta
φT M u0
φT M u̇0
(18.12)
Las expresiones (18.12) permiten estudiar mediante superposición modal un sistema que ya se encuentre en movimiento; es decir, que en lugar de partir de condiciones de reposo, tenga unas condiciones iniciales
(u0 , u̇0 ).
Capítulo 19
Mecánica multicuerpo
Un sistema multicuerpo es el resultado de describir un sistema mecánico como la
composición de cuerpos sólidos (rígidos o exibles) unidos por enlaces que restringen
su movimiento relativo. El estudio de la dinámica multicuerpo es el análisis de cómo
se mueven dichos sistemas bajo la inuencia de fuerzas.
19.1. Acoplamiento de modelos físicos
Para aplicar este tipo de formulaciones es necesario tener un modelo que describa
el comportamiento de cada uno de los cuerpos que se desea unir. Uno de los modelos
más utilizados es la discretización con elementos nitos. Gracias a la mecánica multicuerpo es posible analizar sistemáticamente el comportamiento de varios modelos
conectados. Para ello, al sistema inicial de ecuaciones de cada cuerpo, denido en
la expresión (17.1), se le añadirán las ecuaciones de ligadura.
Dichas ecuaciones de ligadura afectarán a los puntos de contacto de cada uno de
los
N
cuerpos imponiendo una restricción de movimiento y aplicando el principio
de acción y reacción en dichos grados de libertad; es decir,
∆fiA = λAB
ij
A
B
AB
L u ,u ,λ
=
∆fjB = −λAB
ij
A
ui − uB
j = 0
134
(19.1)
CAPÍTULO 19.
donde
L uA , uB , λAB
ij
modelo
A
y
135
MECÁNICA MULTICUERPO
λAB
ij
son las ecuaciones de ligadura,
uA
son las incógnitas del
son las incógnitas relativas a las ligaduras de los modelos
en los grados de libertad
i
y
j
A
y
B
respectivamente.
En el método de los elementos nitos se representa la rigidez de un cuerpo exible
como
A
K11
A
K11
A
Knn
···
···
.
.
.
..
.
.
..
.
.
.
A
A
A
KA =
Ki1 · · · Kii · · · Kin
.
.
.
..
.
.
.
.
.
.
.
A
A
A
Kn1
· · · Kni
· · · Knn
n grados de
A
u1
.
..
A
A
u = ui
.
.
.
A
un
y que está vinculada a cada uno de los
(19.2)
libertad del cuerpo
(19.3)
.
Por lo tanto, el sistema resultante será del tipo
M üA + C u̇A + L uA , uB , λAB
= f A − qB
ij
(19.4)
Para enlazar dicha rigidez se añaden las ecuaciones de ligadura (19.1). Éstas
se representan matricialmente como dos vectores relacionados con los modelos a
conectar. La columna de la matriz asociada al modelo
modelo
B
será:
LAB
A
que lo conecta con el
0
.
..
= δ ki =
1
.
.
.
0
(19.5)
CAPÍTULO 19.
donde
δ ki
136
MECÁNICA MULTICUERPO
es la función
delta de Kronecker
e
i el nodo de conexión. L es una matriz
con tantas columnas como ligaduras a otros modelos y tantas las como grados
de libertad tenga el modelo. Cada columna de
L
aporta la información sobre una
conexión a un modelo colindante. Para ello, dicha columna valdrá
k,
que coincida con el grado de libertad conectado,
1
en aquella la,
i.
A
i
¢fAB
l
¢f
BA
¢fAC
j
B
¢fCA
k
C
Figura 19.1: Sistema multicuerpo
Utilizando esta nomenclatura, las matrices del sistema (19.4) aplicado a los cuerpos
A, B
y
C
se ensamblan de la siguiente manera. La matriz tangente de las fuerzas
internas del sistema vendrá dada por
KA
Kt =
T
LAB
T
LAC
LAB
K
B
BA
−L
KC
− LBA
LAC
−LCA
T
− LCA
T
(19.6)
CAPÍTULO 19.
137
MECÁNICA MULTICUERPO
las incógnitas del problema serán
u=
A
u
u
B
uC
λAB
ij
λAC
lk
(19.7)
y el vector de fuerzas externas estará denido como
A
AB
f + ∆f + ∆f
f B + ∆f BA
f =
f C + ∆f CA
0
0
AC
Gracias a esta formulación sistemática, los diferentes cuerpos
(19.8)
A,B ,..., N
se pue-
den estudiar conjuntamente utilizando distintos modelos para cada uno. En este
caso, todos los cuerpos se han modelado utilizando elementos nitos, pero es posible aplicar esta sistematización a cuerpos modelados por diferentes técnicas, como
se propondrá más adelante.
19.2. Aplicación a catenarias con modelos FEM
La mecánica multicuerpo puede ser de utilidad en estructuras compuestas por
partes que se repiten regularmente, como es el caso de las catenarias ferroviarias.
Dichas catenarias están compuestas por la repetición de vanos idénticos a lo largo de
cada uno de los cantones que suelen medir cientos de metros. Al utilizar esta técnica
se reduce el tamaño inicial del modelo ya que sólo es preciso denir un cuerpo que se
repetirá tantas veces como se desee. Con esto no se reduce, no obstante, el tamaño
del problema, aunque se simplica el cálculo del equilibrio inicial.
Para analizar y vericar los diferentes modelos, se estudiará la catenaria de-
CAPÍTULO 19.
138
MECÁNICA MULTICUERPO
nida por la norma de validación de modelos numéricos de interacción catenariapantógrafo EN50318 y que se muestra en la gura 19.2.
Figura 19.2: Catenaria ferroviaria EN50318 de 3 vanos
Cada vano de la catenaria constituye un cuerpo diferente enlazado por sus extremos mediante multiplicadores de Lagrange a los cuerpos colindantes como se observa
en la gura 19.3. Cada uno de estos cuerpos se puede analizar independientemente
siempre que se obtengan los multiplicadores de los modelos colindantes.
2
¸AB
µ
¸u
AB2
¸u
¸µ
¸v
1
¸AB
µ
¸u
¸v
AB1
AB1
¸u
2
¸BC
µ
BA2
¸u
BC2
BA1
1
¸BC
µ
BA1
¸µ
¸u
CB2
¸µ
CB2
BA2
1
¸CB
v
1
¸BC
u
BA1
1
¸CB
u
1
¸CB
µ
1
¸BC
v
Figura 19.3: Descomposición de la catenaria por vanos
Por ejemplo, es posible usar un paso de tiempo para la integración temporal más
grueso en la zona alejada del punto de contacto del pantógrafo y uno más no en
la zona cuyo cálculo sea más crítico. Para ello habrá que extrapolar el valor de los
multiplicadores (fuerzas externas) en el vano de interés en los pasos de tiempo en
los que sólo se resuelva la zona de crítica. En general, el uso de técnicas multicuerpo
ofrecerá versatilidad a la resolución de cualquier problema. En la gura 19.4 están
representados los multiplicadores necesarios en uno de los nodos de unión. Dichos
multiplicadores representan las fuerzas que aparecen en la unión de los cuerpos.
Estos multiplicadores serán las incógnitas de las ecuaciones algebraicas que ligan
los cuerpos. Gracias a ellos se tiene una gran versatilidad en el tratamiento interno
CAPÍTULO 19.
139
MECÁNICA MULTICUERPO
de cada cuerpo.
¸v
¸AB
µ
¸u
¸v
AB
AB
¸u
BA
BA
¸µ
BA
Figura 19.4: Ampliación de la ligadura en el hilo de contacto entre los vanos
A
y
B
Capítulo 20
Modelo multicuerpo jerárquico para
la reducción del sistema
Además de su uso en estructuras compuestas, la mecánica multicuerpo se usa
habitualmente para resolver problemas compuestos por cuerpos de comportamiento
físico muy diferente. También permite abordar el análisis dinámico de mecanismos
exibles utilizando técnicas de elementos nitos. Éste es el caso de la interacción
catenaria-pantógrafo, donde la catenaria se comporta de manera no lineal y el pantógrafo se puede modelar correctamente de manera lineal.
Cuando se aplica una fuerza puntual sobre una catenaria, como la aplicada por
el pantógrafo, esta se desplaza de forma no lineal, no sólo debido al aumento de la no
linealidad geométrica, sino también al posible pandeo de las péndolas y pérdidas de
contacto. Dichos desplazamientos son mucho mayores cerca de la zona de contacto
y, si la longitud de la catenaria es sucientemente grande, en la zona alejada del
punto de contacto los desplazamientos serán pequeños.
Pese al comportamiento dinámico no lineal de la catenaria, en los lugares donde
los desplazamientos sean pequeños este comportamiento se podrá considerar lineal.
Gracias a ello, en estas zonas es posible aplicar técnicas de reducción de variables
mediante superposición modal, como se ha detallado en el capítulo 18.
Hay que tener en cuenta que el pantógrafo, al desplazarse, modica la zona que
140
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA141
Analisis Modal
¸
¸
¸
Analisis Modal
+
+
+
+
¸
¸
¸
Zona FEM
Figura 20.1: Descomposición de la catenaria por vanos
Analisis Modal
¸
¸
¸
¸
¸
+
+
¸
Zona FEM
Figura 20.2: Paso de vano modal a vano FEM
Analisis Modal
¸
+
Analisis Modal
¸
¸
+
+
+
¸
¸
¸
Zona FEM
Figura 20.3: Paso de vano FEM a vano Modal
se comporta de manera lineal. Por ello, para analizar la interacción dinámica que
se produce entre el pantógrafo y la catenaria, no siempre se podrá utilizar el mismo
tipo de modelo. Un cuerpo modelado con superposición modal deberá transformarse
en un modelo completo a medida que el pantógrafo se acerque para poder capturar
el comportamiento no lineal de la estructura. Asimismo, cuando el pantógrafo se
aleja del cuerpo, se debe volver al modelo reducido para minimizar el número de
variables del sistema, y de este modo se conseguirá reducir signicativamente el
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA142
tiempo de cálculo.
20.1. Formulación
En la resolución combinada se aprovecharán las propiedades de la formulación
multicuerpo. Como se ha explicado anteriormente, este tipo de formulaciones permite que, siempre que los cuerpos estén ligados correctamente, puedan aplicarse
formulaciones diferentes para cada cuerpo con mayor libertad.
Para resolver la interacción dinámica pantógrafo-catenaria se propone: utilizar
superposición modal para analizar aquellos cuerpos que se encuentren más alejados
del punto de contacto (comportamiento lineal); y un análisis completo por elementos
nitos en aquéllos que estén más cerca (comportamiento no lineal).
La dinámica de los cuerpos que se comportan linealmente quedará denida por
el sistema de ecuaciones (18.6), mientras que los que se analizan utilizando un
modelo completo lo estarán por el sistema (17.1). Para ligarlos, se utilizarán los
mismos conceptos que se han aplicado anteriormente: unicidad de desplazamientos
y la aparición de fuerzas de acción y reacción.
No obstante, cuando uno de los cuerpos esté modelado utilizando superposición
modal la ligadura deberá relacionar un desplazamiento con la amplitud de los modos
de vibración del modelo colindante. Para ello se realizará un cambio de base en el
nodo de contacto. Por lo tanto, si a las ligaduras (19.1) se les aplica el cambio de base
(18) se obtiene que la ligadura entre un cuerpo modelado utilizando superposición
modal y uno modelado por elementos nitos es
donde
A
∆f˜ = ϕi λAB
ij
A
B
AB
B
AB
L ξ ,u ,λ
=
∆fj = −λij
ϕ i ξ A − uB
j = 0
A
L ξ A , uB , λAB
son las ecuaciones de ligadura, ξ
ij
los modos del modelo
A, u B
(20.1)
son las amplitudes de
son los desplazamientos de los grados de libertad del
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA143
modelo
B
y
λAB
ij
son las incógnitas relativas a las ligaduras de los modelos
en los grados de libertad
i
y
j,
A
y
B
respectivamente.
Se observa cómo en el modelo
A, al que se le ha aplicado la superposición modal,
la fuerza de contacto se reparte en todos los modos del modelo. Por ello,
A
∆f˜
es
un vector en lugar de ser un escalar.
Esta ligadura, expresada de forma vectorial, es diferente si el modelo al que va
asociado es modal o completo. Mientras que si es completo coincide con la expresión
(19.5), si es modal la ligadura será
LAB = ϕi = ΦAB
(20.2)
Para diferenciar las ligaduras de modelos con superposición modal y modelos
completos, las ligaduras asociadas a modelos con superposición modal se designarán
con la letra
Φ.
Por lo tanto, un sistema multicuerpo para análisis combinado se empleará como
matriz tangente al vector de esfuerzos internos
K̃
A
T
ΦAB
T
ΦAC
ΦAB
K
B
BA
−L
KC
− LBA
ΦAC
−LCA
T
− LCA
T
(20.3)
, como incógnitas,
ξ
A
uB
uC
λAB
ij
λAC
lk
(20.4)
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA144
y como matriz de fuerzas externas,
A
AB
AC
˜
˜
˜
f + ∆f + ∆f
B
BA
f
+
∆f
C
CA
f
+
∆f
0
0
(20.5)
20.2. Resultados y vericación
El modelo multicuerpo FEM-Modal se ha implementado en el lenguaje de propósito general MATLAB
R
. Para realizar la vericación se ha utilizado un cantón
de 10 vanos de la catenaria denida por la norma europea EN50318 y representada
en la gura 19.2.
Se han simulado 6 segundos de desplazamiento del pantógrafo bajo la catenaria
a 300 km/h lo que supone una distancia de 500 metros a partir del punto de carga
del pantógrafo. Se han modelado utilizando elementos nitos aquellos vanos que
tuvieran algún punto a menos de 20 metros del pantógrafo en cada instante y por
superposición modal el resto de vanos. Por lo tanto, dependiendo de la posición del
pantógrafo en cada instante, cada vano ha sido modelado por superposición modal
o usando la malla completa de elementos nitos. Para la resolución numérica se ha
utilizado un integrador
α-generalizado
con radio espectral,
ρ = 0,9.
En la gura 20.2 se presentan superpuestas las fuerzas de contacto resultantes
utilizando el modelo completo de elementos nitos y el modelo multicuerpo FEMModal. Dichas fuerzas han sido ltradas a 20Hz tal y como dene la norma EN50318.
Los resultados muestran que el modelo responde a la perfección en el cálculo de
la fuerza de contacto y además reduce el tiempo de ejecución en un
60 %
utilizando
estos parámetros. Mientras el modelo completo necesitó 3h 23m 32s para completar
la simulación, el modelo multicuerpo tan solo requirió 1h 6m 55s. La reducción
en el tiempo de ejecución depende criticamente de las variables utilizadas como la
distancia del pantógrafo en la que el cálculo completo, el número de modos utilizados
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA145
250
Completo
Modal+FEM
Fuerza de contacto [N]
200
150
100
50
0
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.4: Fuerza de contacto: FEM vs. multicuerpo FEM-Modal
y el tiempo total de simulación. Un análisis de sensibilidad a estas variables se llevará
a cabo en la sección siguiente.
La gura 20.5 representa el desplazamiento vertical de un poste mientras el pantógrafo avanza. Como ya se ha comentado anteriormente, el máximo de este valor
es crítico para cumplir los requisitos denidos por la norma europea EN50318. Se
observa cómo en la zona de interés, dónde los desplazamientos son máximos, los
resultados usando el modelo multicuerpo FEM-Modal son muy precisos. Conforme
el pantógrafo se aleja del poste, situado a 300 metros, dicha precisión disminuye. No
obstante, pese a que los resultados son puntualmente diferentes, el rango de desplazamientos es similar, y por ello, al alejarse del cuerpo reducido por superposición
modal el efecto sobre la fuerza de contacto y el desplazamiento del pantógrafo es
mínimo.
A la vista de los resultados se puede concluir que el método garantiza la resolu-
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA146
Completo
Modal+FEM
0.06
0.05
Desplazamiento [m]
0.04
0.03
0.02
0.01
0
−0.01
−0.02
180
195
210
225
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
375
Figura 20.5: Desplazamientos: FEM vs. multicuerpo (FEM+Modal)
ción de este problema ya que ofrece una solución precisa y rápida. Dependiendo de
la precisión necesaria en los cálculos se podrán, además, ajustar los parámetros consiguiendo simulaciones más o menos rápidas. Para determinar el efecto que tienen
los distintos parámetros sobre la solución, se ha realizado un análisis de sensibilidad
tal y como se expone en la sección 20.3.
20.3. Análisis de sensibilidad
El tiempo y la precisión del cálculo multicuerpo FEM-modal depende de dos
variables fundamentalmente: qué zona se considera lineal y cuántos modos de vibración se utilizan para modelar dicha zona lineal.
Cuanto más alejada del punto de contacto esté la zona considerada lineal, mayor
será el número de cuerpos modelados utilizando la malla completa de elementos
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA147
nitos y, por tanto, el número de incógnitas a resolver en cada iteración será mucho
mayor. Esto afectará negativamente al tiempo de cálculo, ya que el proceso será
computacionalmente más costoso; pero, por otro lado, la zona no lineal será más
amplia y, consecuentemente, la precisión de los cálculos será mejor.
Por otro lado, aumentar el número de modos mejora la respuesta en la zona
lineal, ya que ésta se aproxima más a la real y, por lo tanto, será mayor la precisión
en el cálculo de la fuerza de contacto y de los desplazamientos. Es de esperar que el
número de modos de vibración también afecte al tiempo de ejecución, ya que a cada
modo está asociada una incógnita en cada vano modelado por superposición modal.
No obstante, teniendo en cuenta el tamaño del problema, el efecto del número de
modos en el tiempo de computación debe ser menor que el del tamaño de la zona
considerada no lineal y modelada por elementos nitos.
En las guras 20.6, 20.7, 20.8 y 20.9 se presentan fuerzas de contacto calculadas
utilizando diferentes número de modos de vibración y en las guras 20.11, 20.12,
20.13 y 20.14 se presentan desplazamientos.
En dichas grácas se representa la fuerza de contacto entre el pantógrafo y la
catenaria y el desplazamiento del quinto poste durante el paso del pantógrafo por el
quinto y el sexto vano a 300km/h. Estos vanos están comprendidos entre el cuarto
poste, situado a 240 metros del inicio del cantón, y el sexto poste, situado a 360
metros. Además, los resultados se presentan ltrados a 20Hz como dene la norma
europea EN50318.
Cada una de las grácas conserva la zona modelada por elementos nitos y utiliza
10, 20 y 30 modos para cada cuerpo modelado utilizando superposición modal.
Estos resultados son contrastados con los obtenidos utilizando el modelo completo
de elementos nitos.
En las guras 20.10 y 20.15 se observa el efecto de variar el tamaño de la zona
modelada usando elementos nitos. Ambas grácas se han realizado utilizando 30
modos en los cuerpos reducidos.
Los resultados obtenidos utilizando 10 modos de vibración y 15 metros de zona
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA148
de análisis por elementos nitos son aceptablemente buenos, aunque la forma de
la fuerza de contacto varía signicativamente respecto al modelo completo en los
primeros y últimos metros de cada vano. Sin embargo, al aumentar el número de
modos o el tamaño de la zona no lineal se observa una clara convergencia hacia los
resultados obtenidos utilizando el modelo completo.
250
Completo
10 modos
20 modos
30 modos
Fuerza de contacto [N]
200
150
100
50
0
240
260
280
300
320
Posición del pantógrafo [m]
340
360
Figura 20.6: Fuerza de contacto con 15 metros de análisis FEM
En la gura 20.10 se pone de maniesto el efecto que tiene sobre la fuerza de
contacto la distancia modelada utilizando elementos nitos. Se puede observar cómo
la diferencia es más acusada en los máximos y mínimos, mientras que en las zonas
ascendentes y descendentes los resultados son exactamente los mismos en el modelo
completo y los reducidos.
Respecto a los desplazamientos se observa cómo el análisis modal afecta más a
la zona que queda detrás del pantógrafo. La zona que se encuentra inmediatamente
delante del pantógrafo responde de manera idéntica utilizando ambos métodos de
cálculo.
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA149
250
Completo
10 modos
20 modos
30 modos
Fuerza de contacto [N]
200
150
100
50
0
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.7: Fuerza de contacto con 20 metros de análisis FEM
250
Completo
10 modos
20 modos
30 modos
Fuerza de contacto [N]
200
150
100
50
0
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.8: Fuerza de contacto con 30 metros de análisis FEM
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA150
De la gura 20.15 se deduce que el tamaño de la zona considerada no lineal y, por
lo tanto, modelada por elementos nitos es especialmente importante para recoger
con detalle el desplazamiento de los puntos que van quedando detrás del pantógrafo
a medida que el tren se desplaza.
En las tablas 20.1 y 20.2 se han recogido las principales variables de la validación
de la norma EN50318. Se puede comprobar que todos los valores menos uno están
dentro del rango delimitado por la norma y solo hay pequeñas variaciones dentro
de dichos márgenes. Además se presenta de forma numérica el tiempo necesario
para completar cada uno de los cálculos. Esta comparativa de tiempos se presenta
también de forma gráca en la gura 20.16.
A la vista de los resultados se puede concluir que el método presenta una precisión más que aceptable con unos tiempos de ejecución mucho más reducidos. Gracias
a ello, este modelo permite un mejor proceso de diseño y optimización de estructuras
ferroviarias.
Modos
Dist. FEM
max F
min F
media F
std F
205.72
39.91
115.82
34.41
15 m.
192.96
48.21
115.13
33.77
20 m.
188.54
31.08
115.69
33.52
30 m.
206.17
41.01
115.74
34.79
50 m.
214.26
39.10
116.20
36.79
15 m.
197.72
40.65
115.26
34.10
20 m.
197.86
30.25
115.63
35.26
30 m.
205.30
42.59
115.92
33.83
50 m.
212.30
40.59
116.12
35.52
15 m.
201.67
41.41
115.43
34.46
20 m.
206.88
28.07
115.76
35.95
30 m.
207.17
41.61
115.98
34.21
50 m.
213.37
40.30
116.15
35.55
Completo
10
20
30
Tabla 20.1: Comparativa de resultados en fuerzas
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA151
Modos
Dist. FEM
desp 4
desp 5
desp 6
Tiempo
58.38
59.05
57.47
2h 22m 28.4s
15 m.
56.63
59.15
57.78
0h 41m 20.7s
20 m.
57.32
58.48
55.28
0h 46m 18.5s
30 m.
57.36
58.67
56.74
0h 51m 36.4s
50 m.
57.84
58.52
56.42
1h 6m 22.5s
15 m.
57.03
58.23
56.73
0h 53m 28.5s
20 m.
57.18
58.31
55.40
0h 56m 16.0s
30 m.
57.37
58.05
56.31
1h 0m 51.0s
50 m.
57.69
58.34
56.21
1h 9m 48.9s
15 m.
57.11
57.90
54.37
0h 58m 29.4s
20 m.
57.19
58.66
55.12
1h 1m 39.7s
30 m.
57.42
58.12
56.10
1h 18m 20.7s
50 m.
57.65
58.05
56.24
1h 33m 25.8s
Completo
10
20
30
Tabla 20.2: Comparativa de resultados en desplazamientos
250
Completo
10 modos
20 modos
30 modos
Fuerza de contacto [N]
200
150
100
50
0
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.9: Fuerza de contacto con 50 metros de análisis FEM
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA152
250
Completo
15 metros
20 metros
30 metros
50 metros
Fuerza de contacto [N]
200
150
100
50
0
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.10: Fuerza de contacto con análisis modal de 30 modos de vibración
Completo
10 modos
20 modos
30 modos
0.06
0.05
Desplazamiento [m]
0.04
0.03
0.02
0.01
0
−0.01
−0.02
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.11: Desplazamiento con 15 metros de análisis FEM
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA153
Completo
10 modos
20 modos
30 modos
0.06
0.05
Desplazamiento [m]
0.04
0.03
0.02
0.01
0
−0.01
−0.02
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.12: Desplazamiento con 20 metros de análisis FEM
Completo
10 modos
20 modos
30 modos
0.06
0.05
Desplazamiento [m]
0.04
0.03
0.02
0.01
0
−0.01
−0.02
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.13: Desplazamiento con 30 metros de análisis FEM
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA154
Completo
10 modos
20 modos
30 modos
0.06
0.05
Desplazamiento [m]
0.04
0.03
0.02
0.01
0
−0.01
−0.02
240
255
270
285
300
315
Posición del pantógrafo [m]
330
345
360
Figura 20.14: Desplazamiento con 50 metros de análisis FEM
Completo
15 metros
20 metros
30 metros
50 metros
0.06
0.05
0.04
0.03
0.02
0.01
0
−0.01
−0.02
240
255
270
285
300
315
330
345
360
Figura 20.15: Desplazamiento con análisis modal de 30 modos de vibración
CAPÍTULO 20. MODELO MULTICUERPO JERÁRQUICO PARA LA REDUCCIÓN DEL SISTEMA155
1.4
10 modos
20 modos
30 modos
1.3
1.2
Tiempo [h]
1.1
1
0.9
0.8
0.7
15
20
25
30
35
Distancia de modelado FEM [m]
40
Figura 20.16: Análisis de tiempos
45
50
Capítulo 21
Conclusiones
En esta cuarta parte se propone una estrategia apoyada en una formulación multicuerpo jerárquica para simulación de la interacción dinámica pantógrafo-catenaria.
La jerarquización se modica de forma variable, para ello se establece un modelo de
asignación dinámica de modelización de cuerpos independientes (en este caso vano
a vano) contemplando dos posibilidades: elementos nitos en bases completas o en
bases reducidas por descomposición modal.
Las particularidades más relevantes que se han desarrollado en este modelo son
las siguientes:
Se ha implementado un algoritmo general para el acoplamiento de cuerpos
rígidos o exibles asociado a un código de elementos nitos.
Se ha desarrollado un modelo jerárquico con asignación dinámica que no ha
sido publicado anteriormente en el campo de la dinámica estructural.
Respecto al modelo presentado en la parte anterior cabe destacar las siguientes
aportaciones:
Reducción considerablemente el tiempo de computación.
Los resultados obtenidos son similares a los obtenidos con el modelo completo. Si bien la precisión se reduce, la diferencia en los tiempos de cálculo lo
compensa.
156
CAPÍTULO 21.
CONCLUSIONES
157
La reducción de tiempo es sucientemente alta como para utilizar el método
propuesto en aplicaciones de diseño u optimización con algorítmos metaheurísticos.
El modelo propuesto ha sido comparado con los resultados publicados en la
norma europea EN50318 [CEN99]. Los resultados obtenidos demuestran que la validación es altamente satisfactoria a pesar de no cumplir con todos los requisitos para
la validación. Por lo tanto, la utilización complementaria de las herramientas presentadas en las partes I, II y III permite el diseño, optimización, cálculo y validación
de cualquier catenaria ferroviaria existente en el mundo.
Parte IV
Conclusiones y Aportaciones
Originales
158
159
De la misma forma en que se ha estructurado el presente proyecto nal de carrera,
también las conclusiones se expondrán en tres bloques relativos a cada parte. En
la primera parte se propone un nuevo método para el cálculo de la posición de
equilibrio estático de estructuras tridimensionales de cables. Este método se basa en
las ecuaciones analíticas de la catenaria y supone una generalización de la aplicación
previa para el cálculo de equilibrio inicial de catenarias realizado por el equipo de
investigación en mecánica computacional del ICAI coordinado por el director de este
proyecto. La validación del método se ha llevado a cabo mediante la comparación
con problemas de estructuras de cables publicados en la literatura cientíca. La
precisión del método ha quedado altamente contrastada ya que las diferencias entre
los resultados obtenidos y los publicados por otros autores son del
de los casos y de menos del
1%
7%
en el peor
en valor medio.
Las aportaciones más relevantes de este método respecto al anteriormente citado
son las siguientes:
El método anterior consideraba sólo cables estructuras de cables bidimensionales en el plano vertical. En el nuevo método, aprovechando que las catenarias
están contenidas en un plano vertical, se incorpora una formulación semianalítica completamente tridimensional.
Además se tiene en cuenta la elasticidad y la deformación térmica de los cables
. A pesar de que esta suele ser despreciable algunas aplicaciones requieren la
consideración de deformación elástica en estructuras de cables.
Las restricciones propias de las estructuras de cables son incorporadas en la
formulación de una forma natural. Además pueden emplearse para incluir modelos de dispositivos mecánicos como poleas, pretensores de cables, soportes,
muelles, etc.
Respecto a otros métodos de simulación de estructuras de cables las principales
ventajas que éste presenta son las siguientes:
160
Debido a que este método está basado en las ecuaciones exactas de la catenaria,
las ventajas propias del método propuesto en [LGCT06] le son inherentes.
Desde un punto de vista numérico, el método presenta una alta eciencia ya
que el tamaño del sistema de ecuaciones a resolver, en lugar de depender de
la discretización espacial, depende de la topología de la estructura.
Por otra parte la mayoría de algoritmos de resolución de sistemas de ecuaciones
no lineales algebraicos requieren el cálculo de la matriz jacobiana. A pesar de
que su cálculo es laborioso, las expresiones analíticas de la matriz jacobiana
son intrínsecas al método lo cual le reporta una mayor rapidez y precisión.
El problema de equilibrio inicial y el cálculo del equilibrio estático bajo cargas
se resuelven siguiendo el mismo algoritmo. Gracias al tratamiento de los parámetros conocidos y desconocidos ambos tipos de problemas se pueden resolver
fácilmente.
El método tratado en esta parte es perfectamente válido para la mayoría de las
aplicaciones ingenieriles tales como catenarias ferroviarias, sistemas de transporte
de energía eléctrica, redes de metro, funiculares, etc. Además, a través de la implementación de dicho modelo en MATLAB es posible obtener los datos necesarios
para resolver cálculos dinámicos por elementos nitos. Aprovechando los resultados
obtenidos en la primera parte, en la segunda parte se propone un nuevo método
para simulación de la interacción dinámica pantógrafo-catenaria. Las aportaciones
más relevantes que se han llevado a cabo se pueden separar en tres aspectos:
Se ha creado una nueva herramienta general de elementos nitos en la que ha
sido posible implementar todos los avances presentados en este proyecto nal
de carrera. Además, dicha herramienta es sucientemente versátil como para
resolver otros problemas físicos de transmisión de calor o de electromagnetismo.
Se ha implementado el efecto del pandeo en las péndolas mediante la denición
161
de una rigidez variable. Esto conere un tratamiento más realista del sistema
de cables abordado.
La simulación de la interacción dinámica catenaria-pantógrafo se ha desarrollado con un modelo de elementos nitos empleando una formulación corotacional para los hilos sustentador y de contacto.
Para la integración numérica de la evolución dinámica del sistema se ha implementado el método
α-generalizado que ha permitido incrementar la estabilidad
de la solución ltrando las vibraciones de alta y muy alta frecuencia.
Frente a todo lo publicado anteriormente al respecto en la literatura cientíca,
este modelo sí ha sido validado mediante lo propuesto en la norma de validación
europea EN50318 [CEN99]. Los resultados obtenidos se encuentran dentro de los
margenes de aceptación establecidos en dicha norma, por lo que es apto para la
certicación ocial de catenarias de alta velocidad.
Por último, en la tercera parte de este proyecto se propone una estrategia apoyada en una formulación multicuerpo jerárquica para simulación de la interacción
dinámica pantógrafo-catenaria. La jerarquía de modelos se modica según la respuesta de cada cuerpo (en este caso vano a vano) sea lineal o no lineal contemplando
dos posibilidades: bases reducidas por descomposición modal o elementos nitos en
bases completas. Las particularidades más relevantes que se han desarrollado en
este modelo son las siguientes:
Se ha implementado un algoritmo general para el acoplamiento de cuerpos
rígidos o exibles asociado a un código de elementos nitos.
Se ha desarrollado un modelo jerárquico con asignación dinámica que no ha
sido publicado anteriormente en el campo de la dinámica estructural.
Respecto al modelo presentado en la parte anterior cabe destacar las siguientes
aportaciones:
162
Se consigue reducir considerablemente el tiempo de computación.
Los resultados obtenidos son similares a los obtenidos con el modelo completo. Si bien la precisión se reduce, la diferencia en los tiempos de cálculo lo
compensa.
La reducción de tiempo es sucientemente alta como para utilizar el método
propuesto en aplicaciones de diseño u optimización con algorítmos metaheurísticos.
El modelo propuesto ha sido comparado con los resultados publicados en la
norma europea EN50318 [CEN99]. Los resultados obtenidos demuestran que la validación es altamente satisfactoria a pesar de no cumplir con todos los requisitos para
la validación. Por lo tanto, la utilización complementaria de las herramientas presentadas en las partes I, II y III permite el diseño, optimización, cálculo y validación
de cualquier catenaria ferroviaria existente en el mundo.
Parte V
Bibliografía
163
Bibliografía
[AAB74] J. H. Argyris, T. Angelopoulus, and B. Bichat. A general method for
the shape nding of lightweight tension structures.
in Applied Mechanics and Engineering,
[AGR06] A. Andreu, L. Gil, and P. Roca.
Computer Methods
3(1):135149, 1974.
A new deformable catenary element
Computers and Structures,
for the analysis of cable net structures.
84(29):18821890, 2006.
[Bar88] MR Barnes. Form-nding and analysis of prestressed nets and membranes.
Computers and Structures,
[BL99] D. Bruno and A. Leonardi.
transport systems.
30(3):685695, 1988.
Nonlinear structural models in cableway
Simulation Practice and Theory, 7(3):207218, 1999.
[BLM00] T. Belytschko, W.K. Liu, and B. Moran.
continua and structures.
J Wiley & Sons, 2000.
[CCH84] F. Chaplin, G. Calderbank, and J. Howes.
cable net structures.
Nonlinear nite elements for
The technology of suspended
Longman Group Limited, New York, 1984.
[Cel06] P. Cella. Methodology for Exact Solution of Catenary.
tural Engineering,
Journal of Struc-
125(12):14511453, 2006.
[CEN99] CENELEC. Validation of simulation of the dynamic interaction between
pantographs and overhead contact line. Railway Applications. Current
Collection Systems prEN 50318, CENELEC, 1999.
164
165
BIBLIOGRAFÍA
[CH93] J. Chung and G.M. Hulbert.
A time integration algorithm for struc-
tural dynamics with improved numerical dissipation: The generalized-α
method.
Journal of Applied Mechanics - ASME,
[Cha02] D. Chamoret.
60:371375, 1993.
Modélisation du contact: nouvelles approches numériques.
PhD thesis, École Central de Lyon, 2002.
[Chr96] P.M. Christou.
An Integrated Technique for the Analysis of Frame and
Cable Structures.
PhD thesis, University of Florida, 1996.
[CI99] C.S. Chen and D.E. Ingber.
Osteoarthritis Cartilage,
skeleton to cytoskeleton.
[Cri90] M.A. Criseld.
Tensegrity and mechanoregulation: from
A consistent co-rotational formulation for non-linear,
three-dimensional, beam-elements.
chanics and Engineering,
[Cri91] M.A. Criseld.
7(1):8194, 1999.
Computer Methods in Applied Me-
81:131150, 1990.
Non-linear Finite Element Analysis of Solids and Struc-
tures, Vol.1: Essentials.
J Wiley & Sons, 1991.
[CV01] T.F. Coleman and A. Verma.
A Preconditioned Conjugate Gradient
Approach to Linear Equality Constrained Minimization.
Optimization and Applications,
[DF00] P. De Fonseca.
Computational
20(1):6172, 2001.
Simulation and Optimisation of the Dynamic Behaviour
of Mechatronic Systems.
PhD thesis, Katholieke Universiteit Leuven,
2000.
[DJB94] J.G. De Jalón and E. Bayo.
Kinematic and Dynamic Simulation of
Multibody Systems - The Real-Time Challenge.
[Dre32] C.S. Drewry.
A memoir on suspension bridges.
London, 1832.
Springer Verlag, 1994.
A. and R. Spottiswoode,
166
BIBLIOGRAFÍA
[EOSW88] S.D. Eppinger, D.N. O'Connor, W.P. Seering, and D.N. Wormley. Modeling and experimental evaluation of asymmetric pantograph dynamics.
Transactions of the ASME. Journal of Dynamic Systems, Measurement
and Control,
110(2):p168 174, 1988.
[ES98] P. Eberhard and W. Schiehlen. Hierarchical modeling in multibody dynamics.
Archive of Applied Mechanics (Ingenieur Archiv),
68(3):237
246, 1998.
[Fle87] R. Fletcher.
Practical Methods of Optimization [M].
John Wiley & Sons,
1987.
[GB88] L. Grundig and J. Bahndorf. The design of wide-span roof structures
using microcomputers [J].
Computers and Structures,
30(3):495501,
1988.
[GC01] M. Géradin and A. Cardona.
Element Approach.
Flexible Multibody Dynamics: A Finite
Wiley, 2001.
[GR97] M. Géradin and D. Rixen.
Mechanical Vibrations: Theory and Applica-
tion to Structural Dynamics.
John Wiley & Sons, 1997.
[HA82] RB Haber and JF Abel. Initial Equilibrium Solution Methods for Cable
Reinforced Membranes.
Engineering,
Computer Methods in Applied Mechanics and
30(3):263306, 1982.
[HHT77] H. Hilber, T. Hughes, and R. Taylor.
Improved numerical dissipation
for time integration algorithms in structural dynamics.
gineering and Structural Dynamics,
Earthquake En-
5:283292, 1977.
[HL00] K.M. Hsiao and W.Y. Lin. A co-rotational nite element formulation for
buckling and postbuckling analyses of spatial beams.
in Applied Mechanics and Engineering,
Computer Methods
188:567594, 2000.
167
BIBLIOGRAFÍA
[HL06] Y. Huang and W. Lan. Static analysis of cable structure.
hematics and Mechanics,
[Hug87] T.J.R. Hughes.
Applied Mat-
27(10):14251430, 2006.
The Finite Element Method, Linear Static and Dynamics
Finite Element Analysis.
Prentice Hall, 1987.
Solving Ordinary Dierential Equations II -
[HW91] E. Hairer and G. Wanner.
Sti and Dierential-Algebraic Problems.
Springer-Verlag, 1991.
[Ing93] D.E. Ingber. Cellular tensegrity: dening new rules of biological design
that govern the cytoskeleton.
[Irv81] H.M. Irvine.
Journal of Cell Science, 104:613627, 1993.
Cable Structures.
[KS72] K. Kanzaki and T. Sakai.
MIT Press, Cambridge, MA, 1981.
Studies on the cable crane hung at three
supports (I)(1) A way of calculation supposing static balanced state.
Journal of the Japanese Forestry Society,
[Lam91] J.D. Lambert.
54:103112, 1972.
Numerical Methods for Ordinary Dierential Systems.
The initial value problem.
John Wiley & Sons, 1991.
[LGCM07] O. Lopez-Garcia, A. Carnicero, and JL Maroño. Inuence of stiness
and contact modelling on catenarypantograph system dynamics.
nal of Sound and Vibration,
Jour-
299(4-5):806821, 2007.
[LGCT06] O. Lopez-Garcia, A. Carnicero, and V. Torres.
Computation of the
initial equilibrium of railway overheads based on the catenary equation.
Engineering structures,
28(10):13871394, 2006.
[LS71] K. Linkwitz and H.J. Schek. Einige Bemerkungen zur Berechnung von
vorgespannten Seilnetzkonstruktionen.
(Ingenieur Archiv),
40(3):145158, 1971.
[LYP98] CY Lai, Z. You, and S. Pellegrino.
Reectors.
Archive of Applied Mechanics
Shape of Deployable Membrane
Journal of Aerospace Engineering,
11(3):7380, 1998.
168
BIBLIOGRAFÍA
[MC02] Jesús Montesinos and Antonio Carmona.
Tecnología de la catenaria.
Mantenimientos de Infraestructura RENFE, Madrid, 2002.
[Mol84] M. Mollaert. Formnding of mixed structures . In
Space Structures,
Third Conference on
1984.
[MS83] J.J. Moré and DC Sorensen.
Computing a Trust Region Step.
Journal on Scientic and Statistical Computing,
SIAM
4:553, 1983.
[MT90] E. Moncrie and BHV Topping. Computer methods for the generation of
membrane cutting patterns.
Computers and Structures,
37(4):441450,
1990.
[nN59] N. Newmark. A method of computation for structural dynamics.
of Engineering Mechanics Division - ASCE,
Journal
85:6794, 1959.
[nNOR91] B. Nour-Omid and C.C. Rankin. Finite rotation analysis and consistent
linearization using projectors.
and Engineering,
Computer Methods in Applied Mechanics
93:353384, 1991.
[nNW99] J. Nocedal and S.J. Wright.
operations research.
Numerical Optimization Springer series in
Springer, 1999.
[OC97] José Luis de la Fuente O' Connor.
Técnicas de Cálculo para Sistemas
de Ecuaciones, Programación Lineal y Programación Entera.
Reverté,
Barcelona, 1997.
[OT71] J.R. Ockendon and A.B. Tayler. The Dynamics of a Current Collection
System for an Electric Locomotive.
Proceedings of the Royal Society of
London, Series A (Mathematical and Physical Sciences), 322(1551):p447
468, 1971.
[OTS67] F. Otto, R. Trostel, and F.K. Schleyer.
Tensile Structures; Design, Struc-
ture, and Calculation of Buildings of Cables, Nets, and Membranes.
Press, 1967.
MIT
169
BIBLIOGRAFÍA
[PE95] C. Pacoste and A. Eriksson. Element behaviour in post-critical plane frame analysis.
Computer Methods in Applied Mechanics and Engineering,
125:319343, 1995.
[PE97] C. Pacoste and A. Eriksson.
Beam elements in instability problems.
Computer Methods in Applied Mechanics and Engineering, 144:163197,
1997.
+
[PEM 97] G. Poetsch, J. Evans, R. Meisinger, W. Kortüm, W. Baldauf, A. Veitl,
and J. Wallaschek. Pantograph-catenary dynamics and control.
System Dynamics,
28:159195, 1997.
[PG79] A.H. Peyrot and AM Goulois. Analysis of cable structures.
and Structures,
Vehicle
Computers
10(5):805813, 1979.
[PHJ03] T.J. Park, C.S. Han, and J.H. Jang. Dynamic sensitivity analysis for the
pantograph of a high-speed rail vehicle.
Journal of Sound and Vibration,
266(2):235260, September 2003.
[Pug68] Alfred Grenville Pugsley.
The theory of Suspension Bridges.
Edward
Arnold Ltd, London, 1968.
[RB86] C.C. Rankin and F.A. Brogan.
An element-independent co-rotational
procedure for the treatment of large rotations.
Technology - ASME,
Journal of Pressure Vessel
108:165174, 1986.
[RnO88] C.C. Rankin and B. Nour Omid. The use of projectors to improve nite
element performance.
[Ron78] Colin A. Ronan.
Computers and Structures,
30:257267, 1988.
The shorter Science and civilisation in China : an
abridgement of Joseph Needham's original text.
Press, Cambridge, 1978.
Cambridge University
170
BIBLIOGRAFÍA
[Sch74] HJ Schek. The force density method for form nding and computation
of general networks.
gineering,
Computer Methods in Applied Mechanics and En-
3(1):115134, 1974.
[SE64] A. Siev and J Eidelman. Stress analysis of prestressed suspended roofs.
Journal of Structural Division, ASCE,
90:103121, 1964.
[Sor97] DC Sorensen. Minimization of a large scale quadratic function subject
to an ellipsoidal constraint.
SIAM Journal on Optimization,
7:141161,
1997.
[Tim83] S. Timoshenko.
History of Strength of Materials: with a brief account of
the history of theory of elasticity and theory of structures.
Courier Dover
Publications, 1983.
[TWK59] S.P. Timoshenko and S. Woinowsky-Krieger.
Theory of plates and shells.
McGraw-Hill, second edition, 1959.
[Vin83] T. Vinayagalingam.
Computer evaluation of controlled pantographs
for current collection from simple catenary overhead equipment at high
speed.
ASME Journal of Dynamic Systems, Measurement, and Control,
105:287294, 1983.
[WB98a] TX Wu and MJ Brennan. Basic analytical study of pantograph-catenary
system dynamics.
Vehicle System Dynamics,
[WB98b] T.X. Wu and M.J. Brennan.
catenary system dynamics.
30(6):443456, 1998.
Basic analytical study of pantograph-
Vehicle System Dynamics, 30:443456, 1998.
[WB99] T.X. Wu and M.J. Brennan. Dynamic stiness of a railway overhead wire
system and its eect on pantograph-catenary system dynamics.
of Sound and Vibration,
[Wri00] Kenneth R. Wright.
Journal
219(3):483502, 1999.
Machu Picchu: A Civil Engineering Marvel.
Publications, Reston, VA, 2000.
ASCE