An Approach for Automatic Segmentation of Thermal Images in
Anuncio

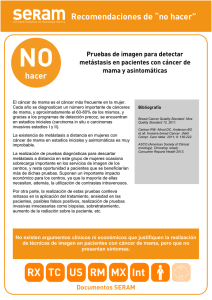
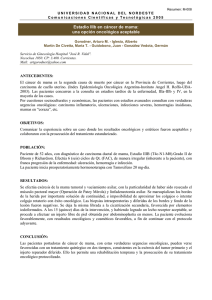
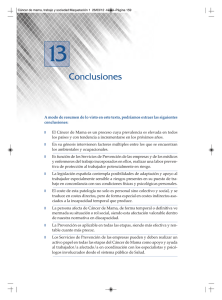
An Approach for Automatic Segmentation of Thermal Images in Computer Aided Diagnosis R. S. Marques, A. Conci, M. G. Pérez, V. H. Andaluz, T. M. Mejía 1 Abstract— Breast cancer is major cause of the high mortality rates among young women in developing countries. In Latin America, it is a great health problem, as well. For example in Brazil and Ecuador, this is the leading cause of cancer among women around 35 years old. Early detection is important to improve the chance of cure. Thermal imaging has the ability to show regions where there is any potential cancer by indicating areas of the body where there is an abnormal temperature variation. Moreover, thermography can detect suspicious regions in patients of any age, even in cases of dense breasts, where the detection of an abnormality can not be achieved by mammography. An essential step in the use of thermal imaging systems is the development of computer-aided diagnosis (CAD). However, any development towards a CAD system or even an examination guided by computer should consider adequate extraction of the region of interest (ROI). This paper proposes a methodology for automatic segmentation of thermal imaging breast and validation of the results by generating a Ground Truth (GT). The automatic method proposed in this paper consists of several image-processing techniques such as thresholding, clustering, edge detection and refinement, among others. For the evaluation of the results the developed GT are presently available on the Internet, in order to allow proper verification of the results. Finally, the results obtained by the proposed methodology for the 328 images used in this study showed average values of accuracy and sensitivity around 96% and 97%, respectively. Keywords— Image Processing, early detection, automatic segmentation of imaging, region of interest (ROI), thermal images, clustering, morphological operations, region growing, curve fitting, refinements, interpolation, Hausdorff distance, Computer Aided Diagnosis (CAD). I. INTRODUCCION E L CÁNCER de mama es la tumoración maligna más frecuente entre las mujeres de edad adulta. Su incidencia ha ido en aumento en los últimos años en países desarrollados y en aquellos en vía de desarrollo. La incidencia de cáncer de mama aumenta en los países en desarrollo debido al aumento de la esperanza de vida, el crecimiento urbano y la adopción de estilos de vida occidentales. Aunque, en algunos la disminución del riesgo de padecerlo se podría lograr mediante R. S. Marques, Instituto Tecgraf, PUC-Rio, Rio de Janeiro, RJ, [email protected] A. Conci, Dep. Ciência Computação, Instituto de Computação-IC Universidade Federal Fluminense - UFF, Niterói, Rio de Janeiro, Brasil [email protected] M. G. Pérez, Escuela Politécnica Nacional (EPN), Quito, Ecuador, [email protected] V. H. Andaluz, Universidad de las Fuerzas Armadas ESPE, SangolquiEcuador, [email protected] T. M. Mejía, Universidad Técnica de Ambato, [email protected] la prevención, estas estrategias no pueden acabar con la mayoría de los cánceres de mama que se desarrollan en países de recursos bajos y medios, donde el cáncer de mama se diagnostica en etapas muy tardías. Por lo tanto, la detección temprana con el fin de mejorar el resultado y la supervivencia del mismo sigue siendo la piedra angular del control del cáncer de mama Anderson et al., 2008 [1]. Así, diferentes estudios han demostrado que la detección del cáncer en estado inicial, es muy importante para aumentar la tasa de supervivencia en las pacientes afectadas. El diagnóstico médico basado en diferentes tipos de imágenes (rayos X, ultrasonidos y resonancia magnética, principalmente). Además, de técnicas más recientes tales como la tomosíntesis, la imagen óptica (Optical imaging); tomografía computarizada (CT); los biomarcadores, la termografía, etc., son herramientas de gran importancia para la detección precoz de estas patologías. Esta pronta detección es, en parte, la responsable de la reducción de los índices de mortalidad por esta causa. Aunque la detección y diagnóstico mediante pruebas médicas anuales (principalmente, mamografías) sigue siendo una práctica común en muchos países como por ejemplo, Estados Unidos. En la mayoría de los demás países, estas pruebas se realizan con una periodicidad menor. Una revisión de estas modalidades de imágenes se puede ver en el trabajo de Ng. [2]. Realmente, la mamografía es la técnica de referencia y la más utilizada para este tipo de diagnóstico, pero no es considerada una técnica de diagnóstico precoz ya que por lo general esta prueba confirma el diagnóstico de cáncer en etapas avanzadas. Una resonancia magnética es muy costosa y factible en países con buena infraestructura en salud y que además, pueden costear programas de cribado poblacionales, organizados a largo plazo. No obstante, en la actualidad, técnicas alternativas como la termografía tienen un gran potencial para la detección temprana de cáncer de pecho, a bajo coste y a temprana edad [3][4][5]. Según Keyserlink et al. [6] esto puede ocurrir diez años antes que otras técnicas. Por otra parte, tiene un gran potencial para diferenciar lesiones benignas de las malignas [7] e indicación pronostica [8][9][10][11]. En Qi y Diakides [10] han demostrado que si el tumor se detecta en tamaño menor de 10 mm, la paciente tiene una probabilidad del 85% de curación, en contraste con una probabilidad del 10% si el cáncer se detecta tarde. Muchos países de bajos y medios ingresos que se enfrentan a la carga de cáncer mama, necesitan implementar programas costo-efectivos, combinadas y asequibles para hacer frente a esta enfermedad altamente prevenible [12]. La termografía es una de las más recientes alternativas. Es especialmente indicada para identificar posibles lesiones que después son estudiadas para lograr la detección precoz de anomalías de la mama. La termografía (estudio térmico por imágenes) es una forma de medir y representar gráficamente el calor sobre la superficie del seno mediante una cámara sensible al calor. El diagnóstico precoz o el conocimiento de los primeros signos y síntomas en la población sintomática, ayuda en el diagnóstico y el tratamiento temprano. Los programas de cribado, es decir, la aplicación sistemática de pruebas de tamizaje en una población aparentemente asintomática, tienen como objetivo detectar a las personas que presenten anomalías indicativas de cáncer. Un programa de cribado es una empresa mucho más compleja que un programa de diagnóstico precoz (OMS, 2007) [13]. Independientemente del método de detección precoz utilizado, dos aspectos esenciales para el éxito de la detección precoz poblacional son una atenta planificación y un programa bien organizado y sostenible que se focalice en el grupo de población adecuado y garantice la coordinación, continuidad y calidad de las intervenciones en todo el continuum asistencial. La selección como objetivo de grupos de edad inadecuados, por ejemplo, mujeres jóvenes con bajo riesgo de cáncer de mama, puede traducirse en una disminución del número de cánceres detectados por cribado, potenciando medidas costo-efectivas [14]. Además, esa focalización en las mujeres más jóvenes obligaría a analizar más tumores benignos y provocaría una sobrecarga innecesaria de los servicios de salud, por los recursos diagnósticos adicionales que entrañaría Yip et al., [14]. Algunos datos sugieren que esta estrategia de diagnosticar oportunamente el cáncer de mama puede originar un "descenso del estadio TNM" (aumento de la proporción de cánceres de mama detectados en una fase temprana) de la enfermedad, que la haría más vulnerable al tratamiento curativo Yip et al., [14][15]. El cáncer también tiene un costo social; la perdida de enorme potencial humano y el tratamiento y el cuidado de un número creciente de pacientes con cáncer tiene un impacto económico creciente. Esto también es una experiencia universal, pero una vez más los detalles son muy diferentes entre los países. El World Cancer Report 2014, revela una carga en el cáncer que se proyecta aumentar en un 70% en todo el mundo en tan sólo dos décadas, pero es en los países de más bajos ingresos con los servicios de cáncer menos desarrollados que el impacto será mayor, puesto que el inicio precoz de algunos tipos comunes de cáncer (por ejemplo: el cuello uterino, hígado, etc.) y la supervivencia general en los países de recursos bajos y medios significan que la carga de años de vida saludable perdidos en estos países es similar a la de los países con más altos ingresos[16]. Es oportuno señalar, que hacer frente a los desafíos planteados por el notable aumento del número de casos de cáncer a nivel mundial, que aunque, se prevé que descienda esta pesada carga en los países de ingresos bajos y medios para tratar la manera de salir del cáncer hacen que sea inverosímil; incluso en los países de más altos ingresos tendrán dificultades para hacer frente a los crecientes costos de tratamiento y de cuidado. Por lo tanto, esclarecer las causas y la elaboración de estrategias de prevención eficaces, para luchar contra el cáncer, tales como la recolección de datos precisos sobre el cáncer, la ocurrencia de cáncer de base, registros poblacionales, son componentes esenciales. Estos enfoques complementan los beneficios en la mejora del acceso a servicios asequibles y eficaces tratamientos del cáncer. En paralelo a los trabajos realizados sobre las causas y su prevención, se han hecho notables progresos en la comprensión de los eventos moleculares y celulares que transforman una célula en normal funcionamiento, en parte de un tumor maligno, que puede acabar con la vida de su huésped. Estos emocionantes avances de la ciencia básica tienen ramificaciones que son evidentes, sobre todo en la clasificación de tipos de cáncer, en la búsqueda de nuevas vías que den pistas sobre sus causas, para poner de relieve las oportunidades para la detección temprana y la prevención [16]. Así, en la literatura muchos científicos han propuesto varios métodos para segmentar y detectar regiones calientes en termogramas y tejidos potencialmente sospechoso presentes en estas imágenes [17-24]. En [25] se puede encontrar un estudio completo de todas estas técnicas y la eventual aplicación de esta, para la detección de cáncer de mama [26]. La termografía puede detectar el cáncer de mama en etapas tempranas de la enfermedad, es posible más temprano que utilizando la mamografía [27] [25], incluso 8-10 años antes [28]. En este trabajo se propone el uso de diversas técnicas de procesamiento de imágenes, tales como la umbralización, detección de contornos, operaciones morfológicas, crecimiento de región y agrupamiento (clustering), así como métodos numéricos de ajuste de curvas por aproximación e interpolación, y la obtención de los bordes para la extracción automática de las regiones de interés de ambas mamas, en imágenes termográficas. II. MATERIALES Y MÉTODOS La segmentación automática de la región de interés (ROI) que se propone en este trabajo considera tres pasos: La detección de los contornos laterales, la obtención de los límites superior y la identificación de los límites inferiores, tal como se muestra en la Fig. 1 [29]. Figura 1. Ilustración de las etapas de la segmentación automática: detección de los límites laterales, superiores e inferiores [29]. A. Características de las imágenes Las imágenes utilizadas para la segmentación se encuentran almacenadas en la base de datos en ocho diferentes posiciones. Las capturas en estas posiciones se obtuvieron sin registrar ningún detalle específico del operador de cámara. La Fig. 2, muestra las ocho diferentes posiciones adoptadas Adquisición de la imagen de las dos mamas, posición de la paciente de frente, con las manos en la cintura (T1); paciente de frente y las manos sobre la cabeza (T2); lateral externa, mama derecha (LEMD); lateral externa, mama izquierda (LEMI); mama derecha (MD); mama izquierda (MI); lateral interna, mama derecha (LIMD) y finalmente, lateral interna, mama izquierda (LIMI). Un punto importante, que merece la pena aclarar es que las imágenes térmicas que se visualizan, no son más que imágenes en pseudo-colores, generados a partir de una matriz de temperaturas. Para la realización del método propuesto en este trabajo, una imagen es generada a partir de la matriz de la temperatura, utilizando 256 niveles de gris, es decir, la menor temperatura registrada corresponderá al nivel 0 (negro) y la más alta corresponderá al nivel 255 (blanco), los demás valores serán reescalonados en el rango de 0 a 255. T1 matriz de temperaturas para la gama de 256 niveles de gris por nuestras formas de visualización, no siendo utilizados los pseudo-colores disponibles por el software proporcionado por FLIR. Esta cuantificación se lleva a cabo para cada imagen, como sigue: la temperatura más baja encontrada corresponderá al nivel de gris 0 (negro) y la temperatura más alta corresponderá al nivel de gris 255 (blanco), las demás temperaturas serán reescalonadas para los valores enteros en el rango de 0 a 255. La Fig. 3, ejemplifica la diferencia en las conversiones entre la paleta de colores de FLIR y la conversión llevada cabo en este trabajo. T2 (a) Posición LEMD MD Posición LEMI MI Figura 3. (a) Matriz de temperaturas (b) Histograma de la imagen después de la transformación de (a) a la paleta de niveles de gris (Grey) mediante el software FLIR (c) Histograma de la imagen después la conversión propuesta en este trabajo. (d) Imagen en niveles de gris, después de la conversión propuesta en este trabajo [29]. B. Detección de los límites laterales Posición LIMD Posición LIMI Figura 2. Serie de imágenes adquiridas en las ocho posiciones propuestas, Motta [30]. Las imágenes utilizadas en este trabajo fueron adquiridas con una cámara térmica modelo FLIR S45 y 320 píxeles de ancho por 240 de alto. El software de la cámara presenta varias posibilidades de correspondencia entre la matriz de temperaturas y el conjunto de colores (paleta de colores). Debido a que la paleta de colores de 135 niveles de gris ya no se utilizan, en este trabajo, se realizó una transformación de la La detección de los límites laterales se ha realizado en dos etapas. En primer lugar, se ha quitado el fondo de la imagen, eliminando parte del cuerpo de la paciente. Después, se han detectado los bordes laterales del cuerpo. 1) Remover el fondo de la imagen Quitar el fondo en una imagen, permite resaltar las regiones de interés. Los histogramas de algunas de las imágenes utilizadas en los experimentos, han permitido visualizar unas modas bien pronunciadas y en general, una clara separación entre dos clases predominantes, donde una de estas clases corresponde al fondo de la imagen y la otra al cuerpo de la paciente, tal como se puede observar en la Fig. 4. Así, para extraer las regiones de interés, se ha manipulado el histograma aplicando una técnica de umbralización. La umbralización de las imágenes, se ha realizado mediante el método de Otsu [31][32]. La principal característica de este método consiste en una maximización de la varianza entre las clases de la imagen [33], maximizando así la distinción entre el cuerpo de la paciente y el fondo de la imagen (Fig. 5). criterio para la detección de bordes mediante las derivadas discretas de una imagen es utilizar las regiones donde la primera derivada es superior a cierto umbral o las regiones donde la segunda derivada tiene cambio de signo (cruces por cero) [34]. Como una imagen es una función de dos dimensiones, es necesario considerar los cambios de los niveles de gris en muchas direcciones. Por ello, las derivadas parciales en relaciona a son utilizada para las direcciones horizontales y verticales. La primera derivada de un punto es obtenida por el operador gradiente, el cual es definido por la suma de sus primeras derivadas parciales. Debido a que los bordes pueden estar horizontal, vertical o en cualquier dirección arbitraria, el operador Laplaciano se destaca por ser isotrópico, es decir, detecta los bordes en cualquier dirección (a diferencia de los operadores de primera derivada) [35]. Por este motivo, es que se ha utilizado el operador Laplaciano en la imagen resultante de la umbralización de Otsu (Fig. 6) para la detección de los contornos del cuerpo de la paciente [29]. El filtro Laplaciano utilizado en este trabajo como una matriz de convolución 3x3, es el siguiente [35]: 0 1 0 1 4 1 0 1 0 Figura 4. Histogramas de algunos termogramas utilizados [29]. Figura 6. Detección de los bordes en las imágenes [29]. C. Detección de los límites superiores Para obtener los límites superiores de la región de interés es preciso identificar primero si existe presencia de cuello y de brazos en las imágenes, los dos casos pueden ocurrir en estas posiciones de la adquisición de la imagen, tal como se muestra en la Fig. 7. Figura 5. Ilustración del proceso de umbralizaciones mediante el método de Otsu [31][29]. 2) Contorno del cuerpo Considerando una imagen como una función de dos variables , , de forma que los bordes de dicha imagen se caracterizan por un cambio de nivel de gris cuando se presenta una discontinuidad de intensidad respecto al gradiente de la imagen tiene una variación repentina, la derivada discreta de una imagen funciona como un detector de bordes [34]. En el caso de imágenes, la derivada discreta es interpretada como la tasa de cambio de niveles de gris, siendo mayor cerca de los bordes cerca de los bordes superior e inferior en las regiones donde los tonos tienen variaciones suaves [34]. El Figura 7. Presencia/ausencia de cuello y brazos en las imágenes [29]. Esta identificación, se realiza por el número de las alternancias que se produce entre el fondo y el cuerpo de la paciente en la imagen umbralizada mediante el método de Otsu [31][32]. Para ello, la imagen es explorada por una línea de exploración [35], donde los puntos de alternancias son identificados, tal como se puede observar en la Fig. 8. El procedimiento que identifica los puntos y los números de alternancias se describen en el algoritmo 1 (Fig. 9). El procedimiento que identifica los puntos y los números de alternancias (Fig. 10. (a)) se describen en el algoritmo 1 (Fig. 9). Sea A={a1, a2,…am} denotado como un conjunto de puntos donde ocurren las alternancias de colores (cuerpo de la paciente y fondo de la imagen), tenemos las siguientes situaciones: • En las imágenes donde el cuello y brazos no capturan el número de alternancias (por ejemplo, en la Fig. 8. (b)) m=|A| no excederá, en dos unidades y el límite superior de la ROI se define por el propio límite superior de la imagen. • Las imágenes donde los brazos y el cuello son capturados (|A|≥6) el límite superior de la ROI se define mediante el segmento de recta (b1, b2) que interconecta dos puntos b1 y b 2. Para encontrar los puntos b1 y b2 basta con realizar un crecimiento de región [34] a partir de semillas adecuadas se encuentran los puntos más bajos en relación a sus regiones. Para definir b1 en las imágenes en el cual |A| ≥ 6 basta utilizar como semilla el punto a2, mientras que para encontrar el punto b2 se utiliza como semilla el punto am-2. El crecimiento de región utilizado, se basa en una estructura de vecindad a 4 [34]. En la Fig. 10 se puede observar los puntos de alternancias obtenidos. Después del crecimiento de región, se obtienen los puntos b1 y b2 (Fig. 10 (b)). Al final del crecimiento de ambas regiones, se dibuja un segmento de línea entre los dos puntos inferiores (Fig. 10 (c)). Figura 8. Alternancias en las imágenes [29]. Xmin ←0; Xmax ←anchura %cuando x ≡ anchura,cor(x,y)=0(negro) y ←altura -1; A ← 0; ultimo_cor ← 0; para x = Xmin hasta Xmax hacer cor_actual ← cor(x, y); si cor_actual ≠ ultimo_cor entonces A ← A ∪ {(x, y)}; fin si ultimo_cor ← cor_actual; fin para return A Figura 9. Algoritmo 1. Identificación de los puntos de alternancias D. Detección de los límites inferiores Definir los límites de las regiones de interés es ciertamente la etapa más compleja de todo el proceso de segmentación. Debido a las características propias de cada paciente, una segmentación automática que pueda abarcar el mayor número de pacientes no es fácil. Resumidamente, la etapa de detección de los límites inferiores inicialmente intenta encontrar las regiones más calientes correspondientes a los pliegues inframamarios de la paciente. Luego, después de la ejecución de una serie de refinamientos, se encuentra un conjunto de puntos que representan la curva de los pliegues inframamarios. Usando técnicas de aproximación e interpolación de puntos en las curvas se encuentra la curva que define el límite inferior de la región de interés (Fig. 11). 1) Umbralización de las regiones más calientes Uno de los principales indicadores de los limites inferiores de las mamas son los pliegues inframamarios. Puede ocurrir una superposición de piel entre una porción inferior de la mama y la pared anterior del tórax. Esta región, retiene más calor y representa las temperaturas más elevadas, correspondiendo a imágenes en escala de grises con curvas más claras. Otras partes del cuerpo que poseen temperaturas más elevadas son las axilas y los pliegues abdominales [36][29]. (a) (b) (c) Figura 10. (a) Puntos de alternancia destacados, (b) crecimiento de región y detección de los puntos inferiores, (c) trazado de segmento de recta entre los puntos inferiores encontrados [29]. 2) Refinamientos Después de la umbralización de la imagen, es necesario que todas las regiones calientes no relacionadas con los pliegues inframamarios sean eliminadas en sucesivas etapas de refinamientos. a) Clustering El primer paso para eliminar las regiones no relacionadas con los pliegues inframamarios, consiste en separar los pixeles en diferentes grupos. La separación de los pixeles se realiza basándose en sus vecindades, es decir, todos los pixeles que están interconectados deben formar parte de un mismo grupo. La Fig. 12, muestra el clustering realizado, donde cada grupo posee un color distinto. Antes del clustering de los pixeles, se realiza una operación morfológica de cerramiento [34], con el objetivo de unir las regiones cercanas, pero desconectadas. A continuación, la imagen es iterada y para cada pixel (no visitado) se realiza un procedimiento de crecimiento de región, utilizando una estructura de vecindad a 8 [34][29]. b) Eliminaciones Una vez que se realiza el clustering es necesario eliminar los agrupamientos indeseados. Para realizar esta tarea, se adaptó el algoritmo, el criterio aplicado consiste en eliminar todos los grupos que poseen pocos píxeles, o que estuviesen muy próximos al límite inferior de la imagen, o por encima del punto medio del cuerpo [29]. c) Separación de los puntos Para obtener las curvas que más se aproximan a los bordes de las mamas, es necesario separar los puntos relacionados con la mama izquierda y la mama derecha. Después de las eliminaciones realizadas en etapas anteriores es posible que |D|=1 o |D|=2. Denotando Dizq y Dder como los grupos relacionados a la mama izquierda y derecha [29]. d) Reducción del número de puntos El primer paso, consiste en detectar los puntos más elevados, con el fin de encontrar curvas que mejor delimiten cada uno de los pechos, es necesario reducir el conjunto de puntos obtenidos después de la última etapa de separación de los puntos. Para que en lo sucesivo se tenga solo el par , , se utilizará los puntos más elevados verticalmente de cada agrupamiento [29], como se muestra en la línea de la Fig. 13 (b). e) Definición de puntos de la mama El siguiente paso del método consiste en encontrar los puntos de la parte externa de la mama. Estos puntos deben estar en la misma línea horizontal de los puntos Dder y Dizq. Con los puntos laterales encontrados (Lizq y Lder) se encuentran los puntos de la parte externa de cada mama (Eder y Eizq) [29]. (a) (b) Figura 12. Umbralización y clustering. (a) Después de la umbralización de las regiones calientes, (b) Después del clustering, donde las flechas indican la región de los pliegues inframamarios [29]. E. Ajuste de curvas Al final de la última etapa del refinamiento es necesario encontrar curvas que se ajusten mejor a los conjuntos de puntos encontrados (Bder y Bizq). IR_0861 IR_3849 IR_1321 (a) (b) (c) Figura 13. Ejemplos de las etapas efectuadas en el paso de refinamientos (a) después de la separación entre la mama izquierda y derecha, (b) después de la detección de los puntos más elevados de cada clustering, (c) después de seleccionar el mejor segmento [29]. El término ajuste de curvas se refiere a un conjunto de técnicas que tienen por finalidad encontrar la expresión analítica que represente un conjunto arbitrario de datos geométricos, como las coordenadas de puntos. Para ello, existen dos formas de realizar es ajuste: aplicando técnicas de interpolación o de aproximación [37][29]. La Fig. 14 muestra un ejemplo de ajuste de curvas aplicando interpolación, Spline cubica. Figura 11. Detección de los límites inferiores. F. Finalización de la segmentación Después de detectar los límites laterales, superiores e inferiores, se realiza la unión de los resultados de cada una de esas etapas (Fig. 1), de lo cual resultará una imagen que sólo tiene los bordes de la región de interés (Fig. 15). Hasta entonces los puntos que componen la región de interés no se han determinado. 1) Definición de la región de interés Para finalizar la extracción de la región de interés se realiza un crecimiento de región en un punto superior al punto más elevado del borde inferior. Al final de la detección de los que límites inferiores de la ROI se encuentra el punto representa el punto más elevado (en relación al eje y) del borde inferior. Consecuentemente, basta utilizar el pixel que se encuentra arriba de como semilla para iniciar el proceso de crecimiento de región. Dicho resultado se puede ver en la Fig. 16. 2) Separación de las mamas La separación de las mamas llevada a cabo en esta trabajo está compuesta en cierto modo de una contrapropuesta de la propuestas presentadas en Motta [30, 36] y Borchartt el al. [38] para corregir la postura de las pacientes en las imágenes térmicas, teniendo en cuenta que muchas veces las pacientes se encuentran inclinadas para la izquierda o para la derecha. Borchartt el al. [38] propuso una transformación geométrica como una etapa de preprocesamiento en la metodología de Mota [30, 36] para corregir el mal posicionamiento de los pacientes. En este trabajo, la separación de las mamas está basada en cuatros puntos de referencia. Para una fácil comprensión se el punto más elevado de la curva inferior que denomina delimita los pliegues inframamarios, debido a que después de la interpolación entre las curvas encontradas para la mama izquierda y derecha, respectivamente. y se definen justo después del ajuste de curvas por aproximación realizado para cada mama. es el punto superior aún indefinido que junto con formarán un segmento de recta que dividirá la imagen en mama izquierda y derecha. Donde se muestra la relación de estos puntos para que un segmento de recta sea dibujado (Fig. 17). Figura 17. Separación de las mamas mediante los cuatro puntos de referencia aplicada sobre la imagen IR_0225. Figura 14. Resultado de ajuste de curva mediante interpolación por spline cúbica natural para algunas imágenes: (a) después del ajuste por aproximación, (b) después del ajuste por interpolación de los dos puntos [29]. Figura 15. Resultado de la conjunción de los bordes encontrados en las etapas de detección de los límites laterales, inferiores y superiores [29]. El objetivo de la separación de las mamas que se propone en este trabajo es dividir a la ROI de acuerdo a la inclinación de la paciente (Fig. 18). Teniendo en cuenta que un segmento de recta posee un grado de inclinación en relación con el eje x igual a θ. Para determinar la inclinación de la paciente basta encontrar el punto que formara un segmento de recta con una inclinación θ en relación al eje y [29]. (a) (b) (c) Figura 16. (a) Resultado de la unión de las tres etapas de detección, (b) después del crecimiento de la región y (c) Extracción de la región de interés [29]. Figura 18. Proceso de separación de las mamas, aplicado sobre la imagen IR_0225. (a) Obtención de los bordes que delimitan las mamas, (b) exclusión de las regiones no útiles de la ROI y (c) separación de la mama derecha e izquierda [29]. III. RESULTADOS EXPERIMENTALES En este trabajo, además de la segmentación automática de las mamas se presenta un sistema CAD inicial desarrollado con el objetivo de ayudar en la visualización e interpretación de imágenes térmicas. Dicho sistema no tiene la intención de detectar la presencia de una posible enfermedad, solamente mostrar información que pueda mejorar la interpretación de las imágenes por el médico, así como ayudarle en la edición de los informes. Una vez realizado todo el proceso de la segmentación, juntamente con la separación de las mamas (izquierda y derecha), es posible proporcionar algunos datos más detalladamente. Lo que se pretende es presentar un histograma de las temperaturas de la mama izquierda y derecha, con el fin de proporcionar información de la temperatura máxima, mínima, media, mediana y la desviación estándar de las temperaturas (Fig. 19). Además de lo anterior, para la validación de los resultados obtenidos se han validado con aplicación construida para la generación del Ground Truth desarrollado en una Tablet con tecnología touch screen destinado a ayudar a los expertos médicos en la tarea de la segmentación manual de las imágenes térmicas (Figs. 20 y 21). Más detalles sobre el desarrollo y las características de esta aplicación se pueden encontrar en [39]. Figura 20. Aplicación para generar el Ground Truth, en una Tablet [29]. Figura 21. Clasificaciones binarias: (a) Método Automático (b) Ground Truth (c) Superposición de (a) y (b). [29]. IV. CONCLUSIONES La extracción de la región de interés de las mamas es un paso importante en las imágenes térmicas para el desarrollo de sistemas de detección y ayuda al diagnóstico médico. De acuerdo a las validaciones realizadas mediante las métricas estadísticas y de la distancia Hausdorff, el método propuesta presenta resultados óptimos, mostrando ser un método eficiente y rápido. Además se puede concluir que una etapa fundamental para el proceso de la segmentación automática es la correcta identificación del conjunto de puntos relacionados con los pliegues inframamarios y no en el ajuste de curvas. Aunque se detectaron errores que en gran parte se debe a problemas de mala posición durante la adquisición, pacientes con senos voluminosos, así mismo por el hecho de que las pacientes presentan una elevada asimetría entre las mamas. Con la extracción de las regiones de interés mediante el método automático y la generación de sus respectivos Ground Truth se abre la posibilidad de que otros autores utilicen estas imágenes para validar y comparar los abordajes propuestos en este trabajo. (a) AGRADECIMENTOS Los autores brasileños recibieron becas del CNPq, CAPES en el desarrollo de este trabajo; recibieron apoyo parcial de los proyectos INCT-MACC (Medicina Assistida por Computação Científica) y FAPERJ- SiADE (Sistemas de Apoio à Decisão). También, María G. Pérez quiere agradecer a la EPN por apoyar este trabajo. REFERENCIAS [1] (b) Figura 19. Resultados experimentales. (a) imagen IR 1632, de una paciente con cáncer (mama derecha) y los patrones de cada mama (b) Histograma de temperaturas de cada mama, mama derecha (línea azul), y mama izquierda (línea roja) [29]. B.O. Anderson, C.H. Yip , R.A. Smith , R. Shyyan , S.F. Sener , A. Eniu , R.W. Carlson, E. Azavedo ,J. Harford (2008), Guideline implementation for breast healthcare in low-income and middleincome countries: overview of the Breast Health Global, Initiative Global Summit 2007. Cancer, vol. 113, pp. 2221-43. URL: http://www.who.int/topics/cancer/breastcancer/es/index4.html [2] E.Y.K. Ng, Breast imaging: A survey, World J Clin Oncol, 10, vol. 2, no. 4, pp. 171-178, 2011 [3] J.L. Griffin, D. Perlman, “Detección de Cáncer de Mama en Mujeres con Riesgo Promedio y Alto” (en español), Obstetrics & Gynecology 116, pp. 1410-1421, 2010. [4] E.Y.K. Ng, E.C. Kee, R.U. Acharya, Advanced technique in breast thermography analysis, in: Proceedings of the 27th Annual Conference on IEEE Engineering in Medicine and Biology, pp. 710713, 2005. [5] P. Kapoor, S.V.A.V. Prasad, Image processing for early diagnosis of breast cancer using infrared images, Institute of Electrical and Electronics Engineers, vol. 3, pp. 564-566, 2010. [6] J.R. Keyserlink, P.D. Ahlgren, E. Yu, N. Belliveau, M. Yassa, Function infrared imaging of the breast, IEEE Engineering in Medicine and Biology Magazine, vol. 19, no. 3, 30-41, 2000. [7] Y.R. Parisky, A. Sardi, R. Hamm, K. Hughes, L. Esserman, S. Rust, K. Callahan, Efficacy of computerized infrared imaging analysis to evaluate a mmographically suspicious lesions, American Journal of Roentgenology, vol. 180, pp. 263-269, 2003. [8] J. Koay, C. Herry, M. Frize, Analysis of breast thermography with an artificial neural network, in: Proceedings of the 26th Annual International Conference on IEEE EMBS, pp. 1159-1162, 2004. [9] J.Wang, K.J.Chang, C.Y.Chen, K.L.Chien, Y.S.Tsai, Y.M.Wu, Y.C. Teng, T.T.F.Shih, Evaluation of the diagnostic performance of infrared imaging of the breast: a preliminary study, BioMedical Engineering, vol. 9, no. 3, pp. 1-10, 2010. URL: http://www.biomedical-en gineering-online.com/content/9/1/3S. [10] H. Qi, and N. Diakides, Infrared Imaging in Medicine, pp. 1-10. URL: http:// a thermal image.com/content/00/01/48/03/46/userimages/Infrared%20Imaging% 20in%20Medicine.pdfS. [11] E.Y.K. Ng, N.M. Sudarshan, Numerical modelling in conjunction with thermography as an adjunct tool for breast tumor detection, BMC Cancer, vol. 4, pp. 1-26, 2004. [12] URL: www.breastcancer.org [23] B. Sowmya, S. Bhattacharya. Colour image segmentation using fuzzy clustering techniques and competitive neural network. Appl Soft Comput., vol. 11, pp. 3170-8, 2011 [24] M. K. Pakhira, A modified k-means algorithm to avoid empty clusters. Int J Rec Trends Engin.; vol. 1, pp. 220-6, 2009 [25] T. B. Borchartt, A. Conci, R.C.F. Lima, R. Resmini, A. Sanchez, "Breast thermography from an image processing viewpoint: A survey", Signal Processing, vol. 93, no. 10, pp. 2785-2803, 2013. [26] D. A. Kennedy, T. Lee, D. Seely, “A Comparative Review of Thermography as a Breast Cancer Screening Technique”, Integrative Cancer Therapies, vol. 8, pp. 9-16, 2009. [27] N. Sánchez Aldana, J. Velásquez Gómez, Imágenes por Radiación Infrarroja y Termografía, Escuela de Ingeniería de Antioquia (EIA) e Instituto de Ciencias de la Salud (CES). URL: http://web.usal.es/~lcal/termografia_documento.pdf. [28] E.Y. K. Ng and L.N. Ung, Statistical analysis of healthy and malignant breast thermography. Journal of Medical Engineering and Technology, vol. 25, pp. 253-263, 2001. [29] R.S. Marquês, “Segmentação automática das mamas em imagens térmicas, “Dissertação de Mestrado, Universidade Federal Fluminense, Niterói-RJ, 2012. [30] Motta, L. S. Obtenção automática da região de interesse em termogramas frontais da mama para o auxílio à detecção precoce de doenças. Dissertação de mestrado, Instituto de Computação, Universidade Federal Fluminense, Niterói, RJ, Brasil, 2010. [31] N. Otsu, A threshold selection method from gray level histograms. IEEE Trans. Systems, Man and Cybernetics. vol. 9, pp. 62-66, 1979. [32] F. E. S. Alencar, D. C. Lopes and F. M. Mendes Neto; Development of a System Classification of Images Dermoscopic for Mobile Devices, IEEE Latin America Transactions, vol. 14, no. 1, 2016. [33] M. Sezgin, B. Sankur, Survey over image thresholding techniques and quantitative performance evaluation. Journal of Electronic Imaging, vol. 13, no. 1, pp. 146-168, 2004. [34] E. Azevedo, A. Conci, F. G. Leta, Computação Gráfica, V.2 - Teoria e Prática. Elsevier, Rio de Janeiro, 2008. [13] URL: http://www.who.int/topics/cancer/breastcancer/es/index3.html [14] C.H. Yip, R.A. Smith, B.O. Anderson, A.B. Miller, D.B. Thomas, E.S. Ang, R.S. Caffarella, M. Corbex, G.L. Kreps, A. McTiernan, Guideline implementation for breast healthcare in low- and middleincome countries: early detection resource allocation. Cancer. vol. 113, no. 8, pp. 2244-2256, 2008. [35] F. Shih, Image Processing and Pattern Recognition: Fundamentals and Techniques. John Wiley & Sons, Piscataway, 2010 [15] Taller de Estrategias de Intervención en Cáncer de Mama en el Marco del Plan Esperanza. Ministerio de Salud, INEN EsSalud y OPS/OMS. URL: http://www.paho.org/per/images/stories/FtPage/2013/Antecedentesampliados_Taller-Estrategias-Cancer-de-Mama_Plan-Esperanza.pdf [37] L. Piegl, W. Tiller. The NURBS book (2nd ed.). Springer, New York, 1997 [16] World Cancer Report 2014. URL: www.World Cancer Report 2014 [17] E.Y.K. Ng, A review of thermography as promising non-invasive detection modality for breast tumor, Int. J. Thermal Sciences, vol. 48, pp. 849–859, 2008. [18] E.Y.K. Ng, Y. Chen, Segmentation of breast thermogram: improved boundary detection with modified snake algoritm. J Mech Med Biol., vol. 6, pp. 123-36, 2006. [19] E.Y.K. Ng, Y. Chen, L.N. Ung, Computerized breast thermography: study of image segmentation and temperature cyclic variations. Int J Med Eng Technol.; vol. 25, pp. 12-6, 2001. [20] M. EtehadTavakol, S. Sadri, E.Y.K Ng, Application of K- and fuzzy c-means for color segmentation of thermal infrared breast images. J Med Syst. vol. 34, pp. 35-42, 2010. [21] M. EtehadTavakol, E.Y.K. Ng. Breast thermography as a potential non-contact method in the early detection of cancer: a review. J Mech Biol. 2013;13:1330001 [22] T. Jakubowska, B. Wiecek, M. Wysocki, C. Drews-Peszynski. Thermal signatures for breast cancer screening - comparative study. In: Engineering in Medicine and Biology Society (ed): Proceedings of the 25th Annual International Conference of the IEEE, Cancun, Mexico, vol. 2, pp. 1117-20, 2003 [36] L. Motta, A. Conci, R. C. F. Lima, E. Diniz, Automatic segmentation on thermograms in order to aid diagnosis and 2d modeling. In: Proceedings of 10th Workshop en Informática Médica (Belo Horizonte, BH, Brasil, vol. 1, p. 1610-1619, 2010. [38] T.B. Borchartt, R. Resmini, R. S. Marques, A. Conci, A. C. Silva, R. C. F. Lima, Registro de imagem para correção da posição corporal em mamotermogramas. VII Congresso Nacional de Engenharia Mecânica, 2012. [39] R.S. Marques, R. Resmini, A. Conci, C. A. P. Fontes, R.C. F. Lima, Método para segmentação manual de imagens térmicas para geração de ground truth. In: Proceedings of XII Workshop em Informática Médica (Curitiba, PR, Brasil, 2012). Rafael S. Marques es licenciado en Informática por la Universidad Federal de Juiz de Fora - MG (2010), tiene título de maestría en Ciencias de la Computación por la Universidad Federal Fluminense - RJ (2012). Cuenta con experiencia en diversas áreas de la informática, con énfasis en la computación visual. Actuando sobre la Elaboración y Análisis de Imágenes Médicas. Actualmente, trabaja en Instituto Tecgraf de la PUC- Rio como investigador científico. Aura Conci: Ingeniero civil por la U. Federal do Espírito Santo (1979), maestría (1983) y doctorado (1988) en Ingeniería Civil en la Pontificia U. Católica de Río de Janeiro. Fue profesor del Dep. Ing. Mecánica de la PUC/RJ 1988-1994, prof. visitante en la City City University London en 2007/2008, post doctor en 2011 en la U. Rey Juan Carlo de Madrid y prof. visitante en 2013 en York U. (Canadá). Es profesor de la U. Federal Fluminense desde 1994. Ha trabajado en Ciencias de la Computación, desde la creación del Instituto de Ciencias de la Computación de la UFF. Su línea de investigación se considera la aplicación de Métodos Numéricos y Computación Visual. Actúa sobre los temas: análisis de imágenes, procesamiento de imágenes, de imágenes biomédicas, computación visual y reconocimiento de patrones. María G. Pérez: Obtuvo el título de Doctor en Informática y modelización matemática por la Universidad Rey Juan Carlos de Madrid en 2012. Fue docente investigador en el Departamento de Ciencias de la Computación de la Universidad Rey Juan Carlos (Madrid), España (2000-2012). Fue profesor visitante en la Universidad Técnica de Ambato, Ecuador (desde 2012 hasta marzo de 2015). Actualmente, es profesor investigador en la Facultad de Ingeniería de Sistemas de la Escuela Politécnica Nacional de Quito, Ecuador. Su investigación se centra en el desarrollo de métodos computacionales para el análisis de imágenes biomédicas, procesamiento de imágenes, computación visual y reconocimiento de patrones, entre otras. Víctor H. Andaluz: Obtuvo su título de Doctor en Ingeniería en Sistemas de Control, en 2011 en el Instituto de Automática (INAUT) de la Universidad Nacional de San Juan, Argentina. Realizó una estadía investigativa en el Instituto de Sistemas en Tiempo Real (RTS) de la Universidad Leibniz de Hannover, Alemania, como becario del DAAD (Instituto Alemán de Intercambio Académico). Ha trabajado como Instructor de Laboratorio en la Facultad de Eléctrica y Electrónica de la Escuela Politécnica Nacional. Además ha trabajo como Profesor-Investigador en la Escuela Superior Politécnica de Chimborazo y como Director de Investigación y Desarrollo de la de la Universidad Técnica de Ambato. Actualmente, ocupa el cargo Profesor Principal 1 de la Universidad de las Fuerzas Armadas ESPE. Sus áreas de interés son: Robótica Aplicada, Control Cooperativo, Control Industrial, entre otros. Tatiana M. Mejía es Ingeniera en Electrónica y Comunicaciones por la Universidad Técnica de Ambato (2015). Actuando sobre la Elaboración y Análisis de Imágenes Médicas. Actualmente, tramita la posible incorporación a un programa de doctorado en el exterior.