Teoría de navegación
Anuncio

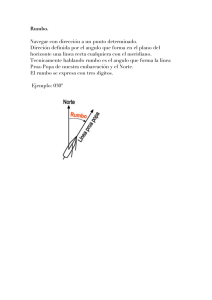
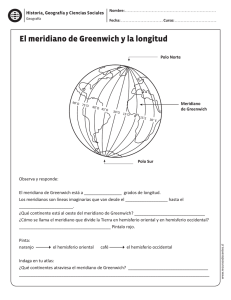
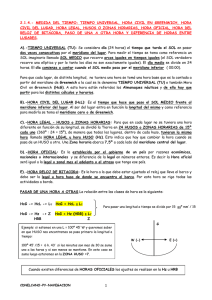
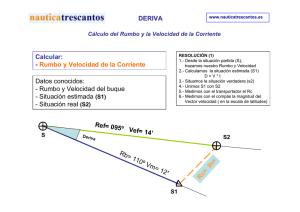
Teoría de navegación 3.1 ESFERA TERRESTRE. Eje, polos, ecuador, meridianos y paralelos, meridiano cero y meridiano del lugar, latitud y longitud: Eje y polos: La Tierra gira alrededor de un eje central llamado Línea de los polos, dando una rotación completa cada 24 horas. Los extremos del eje se llaman Polos. Por tanto hay dos polos, el Polo Norte o Boreal, en el Hemisferio Norte y el Polo sur o Austral, en el Hemisferio Sur. Ecuador: Es el Círculo Máximo, círculo cuyo diámetro coincide con el de la Tierra, perpendicular al eje de la Tierra. Los polos, por ello, están separados 90º del Ecuador. Éste círculo máximo divide a la Tierra en dos Hemisferios llamados Norte y Sur, según qué polo contienen. A partir de él se mide una de las coordenadas geográficas, la Latitud. Meridianos: Son los círculos máximos que pasan por los polos. Lógicamente, son perpendiculares al Ecuador. Hay un número infinito de meridianos (cada punto de la Tierra tiene el suyo propio), aunque se destacan dos por su importancia: Meridiano de lugar: Que es aquel que pasa por el punto donde se encuentra el observador (el barco). Suponiendo el barco en A, el meridiano de lugar es PnAPsPn. Los polos dividen al meridiano de lugar en dos mitades; la que pasa por el buque (PnAPs) a la que se llama Meridiano Superior y la mitad opuesta (PsPn) a la que se llama Meridiano Inferior. Primer meridiano: Que es el que pasa por la ciudad inglesa de Greenwich. Se le llama también Meridiano de Greenwich y Meridiano cero o de origen (PnGPsPn). Sirve de referencia para medir la otra coordenada geográfica, la Longitud. Paralelos: Son los Círculos Menores (cuyo diámetro es menor que el de la Tierra) paralelos al Ecuador. Cada punto de la Tierra tiene el suyo propio. Para situar un punto sobre la superficie terrestre se utilizan las coordenadas geográficas, Latitud y Longitud. Latitud: Es el arco de meridiano contado desde el Ecuador hasta el punto donde se encuentra el buque u observador. Se representa por la letra “l”. La latitud se cuenta de 0º (latitud en el Ecuador) a 90º (latitud en los polos), y se llama Norte (N) cuando el buque se encuentra en el Hemisferio Norte y Sur (S) cuando está en el Hemisferio Sur. Los puntos que tienen la misma latitud se encuentran en el mismo paralelo. Longitud: Es el arco de Ecuador comprendido entre el meridiano superior de Greenwich, hasta el meridiano superior del lugar. La longitud se designa con la letra “L”. Las longitudes se cuentan desde 0º (longitud del meridiano superior de Greenwich) hasta 180º (longitud del meridiano inferior de Greenwich o meridiano de 180º). Un lugar tendrá Longitud Oeste (W) cuando, visto desde fuera de la Tierra y con el Polo Norte arriba, dicho lugar queda a la izquierda del Meridiano de Greenwich y Longitud Este (E), cuando en esas condiciones, el lugar queda a la derecha del Meridiano de Greenwich. Los puntos que tienen la misma longitud se encuentran en el mismo meridiano. NOTA DEL AUTOR: EN LAS FIGURAS SIGUIENTES SE DETALLAN CADA UNO DE LOS CONCEPTOS ANTES DEFINIDOS. DEBIDO AL TAMAÑO DE DICHAS FIGURAS, Y PARA MOSTRARLA EN EL MISMO SENTIDO QUE EL ESCRITO, Y NO APAISADA, SE RECOMIENDA AL ALUMNO QUE UTILICE EL ZOOM DE PANTALLA Y AUMENTE EL TAMAÑO DEL DIBUJO, ASÍ LE SERÁ MÁS FÁCIL IDENTIFICAR CADA UNO DE LOS SÍMBOLOS Y COMENTARIOS EXPUESTOS. 77 LINEAS PRINCIPALES SOBRE LA TIERRA Y COORDENADAS GEOGRÁFICAS 3.2 CORRECCIÓN TOTAL. Definición de declinación magnética.: Los polos magnéticos no coinciden con los geográficos, por lo que, en cualquier punto de la superficie de la Tierra, los meridianos geográficos y los magnéticos se cortan formando entre ellos un determinado ángulo. Este ángulo recibe el nombre de declinación magnética o variación local y es variable con el transcurso de los años. INDICACIÓN EN LA CARTA DEL VALOR DE LA DECLINACIÓN MAGNÉTICA DECLINACIÓN MAGNÉTICA (dm) A efectos de cálculos numéricos la declinación magnética será positiva (+) o Nordeste (NE) cuando el norte magnético se encuentre a la derecha del geográfico y será negativa (-) o Noroeste (NW) cuando el norte magnético se encuentre a la izquierda del geográfico. En las cartas náuticas, mediante uno o más gráficos, vienen representados el valor y el signo de la declinación magnética, así como la rosa de los vientos. Forma de actualizarla: También de las cartas náuticas obtenemos el valor de la 78 variación anual que sufre la declinación magnética y que se llama Incremento o Decremento anuo, según que aumente o disminuya su valor absoluto. Por tanto, para conocer con exactitud el valor de la declinación magnética (dm), para un lugar y un año determinados, tomaremos de la carta náutica el valor de la declinación magnética, el año al que corresponde dicho valor y el valor del incremento o decremento anuo. Multiplicando éste por el número de años transcurridos desde el año para el cual esté dada la declinación magnética hasta el año actual, obtenemos un valor que se suma (si es incremento anuo) o se resta (si es decremento anuo) al valor absoluto de la declinación magnética. Al resultado obtenido se le pone el signo que tenía la dm sin corregir, excepto cuando el valor de la corrección es mayor que la dm a corregir, lo cual implicará un cambio de signo de ésta. El resultado obtenido corresponde a la declinación magnética del año en curso. Definición del desvío de la aguja: Se acaba de concluir que las perturbaciones que afectan a la aguja náutica tienen como consecuencia que esta no indique exactamente la dirección del norte magnético, pues bien, el ángulo formado entre el meridiano magnético y la dirección marcada por la aguja náutica (meridiano de aguja o norte de aguja) se conoce con el nombre de Desvío (). Éste varía para cada rumbo, pues varía la influencia sobre la aguja de los elementos magnéticos internos al barco ya que éstos cambian su posición con respecto al campo magnético al variar el rumbo. A efectos de cálculos numéricos cuando el Na (norte de aguja) queda a la derecha, es decir al Este, del Nm (norte magnético) el es positivo (+) y si queda a la izquierda, es decir al Oeste, es negativo (-). Concepto de la Tablilla de Desvíos: Para eliminar, en todo o en parte, los desvíos de la aguja se instalan en sus proximidades imanes correctores, y otros dispositivos, que contrarrestan los efectos producidos por los hierros estructurales. Al hecho de colocar estos dispositivos correctores se le llama compensar la aguja y esta operación tiene que hacerla un técnico compensador. Tras la compensación de la aguja el técnico levantará la Tablilla de Desvíos, que es una relación de rumbos con sus desvíos correspondientes y con su signo. Esta tablilla se usa para determinar el rumbo a navegar. DOS EJEMPLOS DE ACTUALIZACIÓN DE LA dm DESVÍO (Δ) TABLILLA DE DESVÍOS Definición: De lo visto hasta aquí podemos deducir que se definen varios “nortes” diferentes: Norte verdadero: Indicado por los meridianos geográficos o verdaderos. Norte magnético: El marcado por una aguja náutica sin afectación de elementos magnéticos. Norte de aguja: El señalado por una aguja náutica afectada por elementos magnéticos. El ángulo que forman, en cada lugar y a cada rumbo del barco, el meridiano verdadero con el meridiano de aguja se denomina Corrección Total (Ct). 79 Cálculo de la Corrección Total a partir de la declinación y el desvío: Por lo dicho anteriormente, la Corrección Total será la suma algebraica (suma teniendo en cuenta los signos de los sumandos) de la declinación magnética (dm) y el desvío (Δ). Para finalizar con lo relacionado con el magnetismo no olvidemos que cualquier tipo de herramienta eléctrica, receptor de radio, micrófono, altavoz, equipos de navegación, circuitos eléctricos, móviles etc., si están próximos, alteran el campo magnético sobre la aguja ya compensada, apareciendo desvíos no compensados que falsearían la lectura. CORRECCIÓN TOTAL Cálculo de la corrección total por enfilaciones y por la polar: Veamos a continuación los otros procedimientos para calcular la Corrección total. o Por enfilaciones: Quizás sea el método menos engorroso y consiste en tomar la Demora de aguja de una enfilación, de la que conocemos la Demora verdadera por Carta Náutica, al cortarla o navegar sobre ella. De este modo, y una vez realizada la observación de la Da, aplicamos la fórmula anexa. Si navegamos sobre la enfilación nuestro Rv = Dv y bastará con tomar la Da y aplicar la fórmula anterior para tener la Ct. Ct Dv Da Rv Ra o LINEA ALKAID-CASSIOPEA PERPENDICULAR AL HORIZONTE Por la polar: Con este método podemos obtener una Corrección total bastante aproximada si nos acostumbramos a 1 calcular, a ojo, el azimut (Z) de la Polar; método del marino antiguo. Para ello observaremos la Polar y su posición relativa con respecto a la línea que une 2 3 las estrellas Alkaid y Cassiopea . Si esta línea es perpendicular al horizonte, la Polar estará por encima o por debajo del Polo Norte y su Zv = 0 = N. Si esta línea está horizontal y nuestra latitud es igual o menor de 50º el Zv = 1º E si Cassiopea está a la derecha y Zv = 1º W si está a la izquierda. Si la latitud es mayor de 50º el valor del Zv = 2º. LINEA ALKAID-CASSIOPEA PARALELA AL HORIZONTE 1 El Azimut es el arco de horizonte que va desde los puntos cardinales Norte o Sur hasta la vertical del astro. Hay varias clases de Azimut, según se cuente (Azimut Náutico, por cuadrantes y astronómico) 2 Es la última estrella de la cola de la constelación de la Osa Mayor 3 La constelación de Cassiopea está formada por 5 estrellas que tienen forma de M (cuando está alta) o de W (cuando está baja). Sus estrellas no se observan casi nunca en la mar, residiendo su importancia en que la bisectriz de cualquiera de los dos ángulos que forma la constelación pasa aproximadamente por la Polar. 80 Menos aproximado sería decir siempre que el Zv(Polar) = 0º, aunque podría darse como bueno, pero sabiendo que cometemos un cierto error en el valor de la Corrección Total. Para obtenerla con exactitud deberíamos hallar el Zv(Polar) mediante el Almanaque Náutico entrando con el hl (horario del lugar de Aries) y la latitud, pero algunos de estos conceptos y, lógicamente, el procedimiento del cálculo, aún no se han visto ni entran en el programa de Patrón de Yate. 3.3 RUMBOS. Definición de rumbo verdadero, magnético y de aguja: De forma general RUMBO: Es el ángulo que forma el meridiano que pasa por la embarcación con la dirección en que ésta se va moviendo. Al haber tres clases de meridianos, y por tanto tres clases de “norte”, habrá otros tantos rumbos en función del meridiano que se tome como referencia para contarlo. Rumbo verdadero (Rv): Medido a partir del meridiano verdadero hasta la prolongación de la línea proa popa. Rumbo magnético (Rm): Se mide a partir del meridiano magnético hasta la prolongación de la línea proa popa. Es el rumbo marcado por una aguja magnética instalada en una embarcación desprovista de elementos magnéticos. Rumbo de aguja (Ra): Medido a partir del meridiano de aguja hasta la prolongación de la línea proa - popa. Relación entre ellos: De lo anterior se deduce que, los rumbos leídos sobre las Cartas Náuticas son rumbos verdaderos mientras que la embarcación se gobierna mediante rumbos de aguja. Por ello vamos a estudiar el modo de obtener cada uno de ellos a partir de otro. De la imagen anexa se deduce que: EQUIVALENCIA ENTRE LOS DISTINTOS TIPOS DE RUMBO Por lo que: y como: Ct = dm + resulta que: Para pasar de Rv a Ra o a Rm sólo deberemos despejar adecuadamente en las expresiones anteriores, y así: En las formulas anteriores aparecen los signos +/- para indicar que cada sumando debe ir con el signo que le corresponda. Rumbo de superficie y rumbo efectivo. Abatimiento (Aº): Es el ángulo que forma la estela, es decir la derrota seguida por el barco, con la línea de crujía de éste. Aparece como consecuencia de la acción del viento sobre el barco, que hace que éste se desplace lateralmente hacia sotavento. 81 Rumbo de superficie (Rs): Es el ángulo que forma el meridiano verdadero que pasa por la embarcación con la derrota seguida por la nave. A efectos de cálculos numéricos se considera que si el abatimiento es a babor su signo es negativo (ya que el rumbo verdadero será mayor que el rumbo de superficie) y si abate a estribor el signo es positivo (pues el rumbo verdadero es menor que el de superficie). En el gráfico vectorial de más abajo vemos que el valor del rumbo de superficie se obtiene aplicando el abatimiento al rumbo verdadero. Por tanto: Al igual que en ocasiones anteriores, se trata de operaciones algebraicas, en las deberemos considerar el signo que afecta a cada elemento. Corriente: Es el movimiento de la masa de agua en la cual la embarcación flota. Cuando hay corrientes, por un lado, la embarcación se desplaza sobre la superficie del agua según su rumbo verdadero (o de superficie si hay viento), y por otro, la corriente arrastra la embarcación en la dirección en que se desplaza la masa de agua. Por lo tanto, la derrota seguida por la embarcación con respecto al fondo no coincidirá con la seguida con respecto a la superficie. A la derrota que sigue la embarcación con respecto al fondo se le llama rumbo efectivo (Ref) y a la velocidad que lleva la nave con respecto al fondo, en la dirección del rumbo efectivo, se le llama velocidad efectiva (Vef). Deriva: Es el ángulo formado por el rumbo verdadero (o de superficie si hay viento) y el rumbo efectivo. La corriente queda definida por la dirección en la que se desplaza, rumbo de la corriente (Rc), y por su velocidad en millas, llamada intensidad horaria de la corriente (Ihc). En vista de lo anterior, para determinar el rumbo efectivo y la velocidad efectiva utilizaremos un gráfico vectorial. Para ello, en la carta se trazan el rumbo de superficie (con una longitud igual a la velocidad del buque) y el rumbo de la corriente (con una longitud igual a su intensidad horaria). La resultante de componer los dos vectores nos dará el rumbo efectivo y la velocidad efectiva (longitud, en una hora, del vector rumbo efectivo). 3.4 PUBLICACIONES NAUTICAS DE INTERES. Avisos a los navegantes: Editados por el Instituto Hidrográfico de la Armada semanalmente en fascículos, reflejan las últimas novedades que tengan interés para la navegación como pueden ser luces apagadas, sectores ciegos de luces, boyas y balizas desplazadas, balizas o boyas nuevas, marcas, balizamientos, señalización de naufragios, correcciones de sondas, enfilaciones, ejercicios de tiro etc. Estos avisos tienen por objeto mantener actualizadas con las correcciones todas las cartas y publicaciones que el propio Instituto pública a través de la información proporcionada por diferentes Autoridades nacionales y extranjeras que constituyen el mundo marítimo. Los avisos importantes para la navegación son radiados diariamente por las Estaciones Costeras hasta que son editados o han desaparecido las causas que los motivan. Estos radioavisos se pueden clasificar en: o RADIOAVISOS NAVAREA III, son avisos que corresponden al área III que abarca todo el Mediterráneo y por tanto de largo alcance. Estos avisos son traducidos una vez recibidos en el Instituto Hidrográfico y enviados a la estación radionaval de Madrid desde donde son transmitidos en inglés y español en horarios y frecuencias determinados. o RADIOAVISOS NÁUTICOS COSTEROS, se transmiten en inglés y español por las Estaciones Costeras, en onda media y en VHF, desde el Centro Nacional de Comunicaciones Radiomarítimas (DIANA) o por el Centro Regional de Comunicaciones Radiomarítimas de Las Palmas de Gran Canaria. Estos avisos se radian por las costeras de Onda Media y VHF según unos horarios determinados. Hay unos avisos dentro de esta categoría denominados “vitales”, estos tienen que ser transmitidos en cuanto sean recibidos, repitiéndose en las horas y frecuencias indicadas en el Libro de Radioseñales Tomo II. Los avisos vitales e importantes se emiten en frecuencias de trabajo previo aviso en canal 16 de VHF y 2182 Khz, estas ultimas son las frecuencias de llamada y socorro en fonía. Irán precedidos de la señal de seguridad Securité. o RADIOAVISOS NÁUTICOS LOCALES, son avisos de interés limitado a la navegación general o de tránsito pero importantes para una zona determinada o local. Son transmitidos por las Estaciones 82 Costeras de VHF, operando desde los Centros Regionales de Comunicaciones Radiomarítimas. Son creados u originados por las Autoridades de Marina locales y se envían a estos Centros Regionales para que sean transmitidos por la estación que interese. Estos Radioavisos náuticos locales pueden ser Avurnaves (Avisos Urgentes a los Navegantes) o avisos normales. Los primeros, por su importancia y al tratarse de un peligro, se radian previo aviso (Securité) en canal 16 de VHF, al final del primer periodo de silencio que se presente durante las horas de trabajo de las estaciones de los barcos que tengan un solo operador, y por las frecuencias que figuran en el libro de Radioseñales. Los avisos normales se radiaran por las frecuencias que figuran en el Libro de Radioseñales y no irán precedidos de la señal de seguridad. Correcciones de las cartas náuticas y derroteros: Correcciones de las cartas: Es fundamental disponer a bordo de cartas actualizadas en las que estén incluidas ultimas rectificaciones e incorporaciones de todo tipo de acontecimiento náutico que en ellas se pueda reflejar. Con este fin y a bordo una vez que se sepa la ruta que se va a realizar, se anotará según catálogo de cartas, la relación de todas las que se puedan utilizar con inclusión de las cartas generales y portulanos correspondientes Los portulanos son las cartas de los puertos en ellos se recogen con mucho detalle todo tipo de información localizada y detallada que no se recoge en las de navegación y recalada, como puede ser; sondas en los muelles o dársenas, luces y boyas de canales de acceso, marcas y señales etc. El encargado de la derrota deberá consultar los Avisos a los Navegantes recibidos y en principio comprobará en la relación de cartas preparadas para el viaje si hay que realizar alguna anotación o corrección en las mismas, independientemente del trabajo periódico y constante que sobre estas actualizaciones y correcciones deberían efectuarse a bordo. Para los navegantes de embarcaciones de recreo es muy importante tener en cuenta la comprobación de estas posibles correcciones en las cartas comparándolas con las últimas ediciones o consultando estas posibles variaciones en las Capitanías Marítimas. Es fundamental para la seguridad de la navegación la actualización de todas estas correcciones en las cartas náuticas. Correcciones de derroteros: Estos libros se editan por Instituto Hidrográfico de la Marina. Describen detalladamente la costa, proporcionando al navegante la oportunidad de completar la información proporcionada por las cartas náuticas. También ponen de manifiesto las características geofísicas de la costa, mostrando, mediante fotografías y gráficos, cómo se ve la misma desde la mar, dando la situación y descripción de todos los puntos destacados (faros, torres, campanarios, etc.), enfilaciones, fondeaderos, peligros, balizas, señales especiales, servicios de puerto, etc., siendo por tanto de gran ayuda para navegar a la vista del litoral, reconociendo la costa y para preparar la entrada a radas, fondeaderos y puertos. Además, dan consejos útiles para la navegación y los elementos que se pueden encontrar en cada puerto. Proporcionan también información estadística de las condiciones meteorológicas de la zona abarcada. Los derroteros publicados por el Instituto Hidrográfico de la Marina comprenden las distintas zonas de la costa peninsular española, Islas Baleares, Islas Canarias, costa Norte de Marruecos, costa de Argelia, costa occidental de África hasta Golfo de Biafra (comprendiendo Islas Azores y Madeira, Islas Salvajes y Cabo Verde). Toda esta información se presenta en varios tomos ordenados en una secuencia lógica. Los siguientes consejos son fundamentales para el uso adecuado de los Derroteros: 1 – Se deberá estudiar con detenimiento las instrucciones y advertencias que figuran al principio de los mismos. 2 – Se deberá conocer perfectamente aquellas materias tratadas en la parte anterior a la descripción de las costas, para no perder información útil. 3 – Se deberán corregir con las variaciones que haya habido, desde la fecha de publicación o última corrección. 4 – En los Derroteros españoles, las vistas de la costa están agrandadas en sentido vertical para mayor claridad del dibujo. 5 – Las demoras que aparecen son verdaderas y están dadas de 0º a 360º, a partir del Norte hacia el Este (es decir, en sentido horario). 6 – El viento y la mar se indican por la dirección de donde provienen, las corrientes por la dirección hacia dónde va la masa de agua. 3.5 MEDIDA DEL TIEMPO. Definición (sin cálculos) de Tiempo Universal, hora civil del lugar, hora legal, hora oficial y hora reloj bitácora. Hora civil de Greenwich (HcG) o Tiempo Universal Coordinado (UTC): Se denomina HORA CIVIL DE GREENWICH (HCG) o TIEMPO UNIVERSAL (UTC) al tiempo que hace que el Sol Medio pasó por el meridiano inferior de Greenwich. La HcG también se representa como UTC. 83 Todos los lugares, de longitudes distintas, tienen horas civiles del lugar distintas para un mismo instante, pero en cambio tendrán la misma HcG, para ese instante, ya que esta se toma desde el meridiano de Greenwich; es por ello que la HcG se tome como tiempo universal, y es la que se usa para entrar en el Almanaque náutico para uso de los navegantes. La HcG viene relacionada con la HcL mediante la siguiente fórmula: HcG HcL L Siendo, a efecto de cálculos numéricos, las longitudes Oeste positivas (LW +) y las longitudes Este negativas (LE -). Hora civil del lugar: Es el tiempo que hace que pasó el Sol Medio por el meridiano inferior del lugar. Se cuenta de 0 a 24 horas, pudiéndose indicar con estos dígitos, o bien, desde 0 a 12 citando luego si es AM, Antes del paso por el Meridiano, o PM, Post Meridiam. Al contarse desde el meridiano inferior del lugar, cada lugar tendrá una hora civil diferente; como los meridianos varían con la longitud del observador, a diferente longitud corresponderá diferente hora civil, para un mismo instante. HORA CIVIL DE GREENWICH Y HORA CIVIL DEL LUGAR MiG = Meridiano Inferior de Greenwich MsG = Meridiano Superior de Greenwich MiZ = Meridiano Inferior de Lugar MsZ = Meridiano Superior de Lugar m = Sol Medio HcG = Hora Civil en Greenwich HcL = Hora Civil de Lugar Hora legal (Hz): Para evitar tener que estar cambiando la hora del reloj cada vez que, navegando, varía la Longitud, lo cual ocurre continuamente, los Estados han firmado el llamado CONVENIO DE LOS HUSOS HORARIOS, por el cual se divide la Tierra en 24 zonas o husos, mediante meridianos equidistantes, cuya amplitud en el Ecuador es de 15º (1 hora) de Longitud. Los husos se representan mediante la letra Z y se numeran de 0 a 12 hacia el Este y el Oeste aplicándoseles la misma regla de signos que a las longitudes. El huso central, que es el huso 0 queda dividido en dos partes iguales por el meridiano superior de Greenwich, siendo sus límites los meridianos de longitudes 7º 30’ E o W. El huso +1 es el comprendido entre los meridianos de longitudes 7º 30’ W y 22º 30’ W y así sucesivamente. De éste modo todos los lugares que se encuentran dentro de un mismo huso horario tendrán la misma hora. A esta hora se le llama Hora legal (Hz), siendo la hora que corresponde al huso horario y que queda relacionada con la HcG por la fórmula: HcG Hz Z Z = huso horario: Tendrán signo positivo los husos W y signo negativo los husos E. HUSOS HORARIOS VISTOS DESDE EL POLO SUR Por tanto, en un instante dado existen 24 horas legales diferentes. En el huso 0 se llevará la HcG. La hora legal (Hz) siempre se diferenciará en un número exacto de horas de la HcG. Asimismo, teniendo en cuenta que la Hz es igual a la HcL del meridiano central del huso que se considere, la diferencia máxima entre la Hz y la HcL es de 30 minutos, por lo que la Hz está bastante de acuerdo con la posición del Sol y se puede llevar en los relojes. Las naciones que se han acogido al Convenio de los Husos Horarios no siguen rigurosamente el sistema de estas horas cuando partes pequeñas de sus territorios se salen fuera de su zona. 84 Por ejemplo, parte de Galicia se encuentra en el huso Z= +1, pero España ha adoptado Z= 0 para todo su territorio. En los barcos se hace el cambio de hora cuando se cambia de huso. USOS HORARIOS Hora oficial (Ho): Es la hora que establece el gobierno de una nación con vistas al ahorro de energía, consiguiendo que la jornada laboral coincida, todo lo posible, con el tiempo máximo de luz solar. La hora oficial se relaciona con la HcG mediante la fórmula: HcG Ho O Los países que regulan su hora por la Ho en lugar de por Hz, están recogidos en el Almanaque Náutico para uso de los Navegantes, con el valor y signo de O que sus Gobiernos han adoptado. En España O = - 1 en invierno -2 en verano, excepto en Canarias que es 0 y –1 respectivamente. Hora del reloj de bitácora (Hrb): El RELOJ DE BITÁCORA es un reloj que se lleva en el Puente y que se ajusta a la hora legal del lugar donde se encuentra el barco. Cuando se realizan navegaciones largas, en las que se cambia de huso horario, se va cambiando la hora del reloj de bitácora ajustándola a la del huso en que se navega. Podríamos decir que es la hora oficial de a bordo, por la que se rigen todas las actividades que se lleven a cabo en el buque. 3.6 RADAR. Radio Detection and Ranging (Radio Detección y Distancia) es el significado de sus siglas. Su funcionamiento se basa en medir la distancia desde el punto de emisión (antena) a cualquier otro punto, mediante la medida del tiempo transcurrido desde que emite su radiofrecuencia hasta que vuelve su eco. El transmisor emite un impulso de radiofrecuencia que se propaga a la velocidad de la luz y cuando encuentra un objeto (blanco) se refleja y vuelve. Éste eco es recogido en la antena pasando, entonces, al receptor, donde su señal se amplifica, y, posteriormente, presentando el blanco en la pantalla. Al ser la emisión un impulso de ida y vuelta la medida de la distancia al objeto se realiza dividiendo entre 2 el tiempo transcurrido desde que se emitió la señal de radiofrecuencia hasta que se recibió el rebote de la misma (provocado por el choque con el blanco). Mediante el Radar es posible: • Detectar objetos fijos (boyas, perfil de costa etc.) o en movimiento (buques u otros objetos flotantes). • Determinación de la distancia al objeto (alcance o rango) y posición de éste respecto a nuestro barco. • Determinación de la velocidad y dirección de movimiento del objeto. Por todo ello su utilización como ayuda a la navegación resulta imprescindible, sobre todo cuando se navega en condiciones de visibilidad reducida, en las recaladas y entradas en radas y bahías, aproximaciones a puntos de fondeo etc. 85 IMAGEN DE UNA PANTALLA DE RADAR Se distinguen en ella ecos procedentes de otros barcos así como el perfil de la costa cercana. Compresión de los ajustes necesarios para una óptima visualización (sintonía, ganancia, perturbaciones de mar y lluvia: Sintonía (Tune): Se utiliza para sintonizar el receptor a la frecuencia exacta del transmisor. Es conveniente seleccionar el modo automático pero, de ser necesario es posible hacer un ajuste manual. El punto óptimo de sintonía se encuentra, normalmente, cercano al 50% del recorrido del control, en donde el indicador muestra el mayor numero de barras de sintonía. Ganancia: Su propósito es ajustar la sensibilidad del receptor y a través de ello los ecos que aparecen en pantalla. El ajuste correcto es cuando las pequeñas señales de ruido de fondo (pequeños puntos de luz) son visibles en pantalla. Éste ajuste se realiza con las escalas más grandes. Cuanta más ganancia le demos se verá aparecer más ruido de fondo, pero corremos el riesgo de que los ecos débiles se confundan con los puntos de luz y no seamos capaces de reconocerlos, por el contrario, si ajustamos poca ganancia perderemos los blancos grandes. Perturbación de mar (Anti-Clutter sea): Este ajuste es utilizado para suprimir los ecos causados por las olas, conocido como “retorno de mar”. Aparece en pantalla como un gran número de ecos que pueden afectar al comportamiento del radar. Este mando reduce la amplificación de los ecos en distancias cortas (donde se produce mayor interferencia). Es efectivo hasta una distancia máxima de 4 millas. El ajuste correcto se determina cuando la interferencia de retorno de mar se divide en varios puntos y se pueden distinguir los blancos pequeños. Para asegurarnos un correcto ajuste como regla general, incrementar hasta que desaparezca la interferencia a sotavento, aunque podrá quedar mínimamente visible a barlovento. Existe la posibilidad de que el equipo la maneje en forma automática. Perturbación de lluvia (Anti-Clutter rain): Las tormentas de lluvia, granizo o nieve se detectan de la misma forma que los blancos y ensucian la pantalla. Son fácilmente reconocibles por su aspecto confuso y compacto sobre la pantalla. Se los puede eliminar o reducir con éste filtro y pero no debemos olvidar que un uso excesivo del mismo puede eliminar blancos reales. Marcaciones y distancias radar, su empleo como líneas de posición: La medida de estos parámetros se realiza directamente sobre la pantalla. 4 Para las marcaciones el radar lleva una graduación de 0º a 360º en la parte externa de la pantalla . Las distancias se pueden medir mediante la activación de los anillos fijos de distancia, en cuyo caso hay que tener en cuenta la separación entre anillos, dada por la escala que se esté usando, y se mide por 5 interpolación. También podemos usar el VRM que nos permite medir exactamente la distancia al blanco, sin necesidad de interpolación, y que consiste en la activación mediante un control giratorio de un anillo 4 En los radares modernos esta graduación se representa de forma electrónica y la medición se realiza mediante EBL (Electronic Bearing Line) que es una línea marcadora, también generada electrónicamente. La medición se presenta en forma numérica en la ventanita correspondiente. 5 Variable Range Marker (anillo variable de distancias). 86 variable de distancia, que abarca todo el rango de distancias en la escala considerada. La lectura del VRM se presenta en forma numérica en una pequeña pantalla LCD. En cuanto a la toma de marcaciones o demoras la explicación es un poco más extensa. Empezaremos por decir que en el Radar tenemos la posibilidad de activar, mediante un botón, la llamada “línea electrónica de demora”, o EBL según su sigla inglesa. Esta línea, que es una línea luminosa, la podemos hacer girar, con centro en el propio centro de la pantalla, los 360º de la circunferencia (pantalla) con sólo hacer girar el botón referido. Así pues, para tomar la demora o marcación a un objeto la activaremos y, girando el botón EBL, la llevaremos sobre dicho objeto u eco, siempre centrada en la anchura que tenga el eco, para coger el valor más exacto a la demora real. En cuanto a la presentación en pantalla decir que la podemos seleccionar en modo “norte arriba” o “rumbo arriba”. En el ejemplo siguiente vemos la diferencia entre uno y otro modo para un mismo instante. 87 Fijándonos en el dibujo superior se ve que, en presentación Norte Arriba se pueden tomar directamente las demoras de los diferentes ecos u objetos que aparecen en pantalla (30º al cabo, 180º a B y 270º a A) pues la lectura del ángulo, sobre la escala graduada que aparece en el perímetro de la pantalla, se hace desde el Norte hasta el propio objeto (definición de demora) mientras que en modo Rumbo Arriba la lectura directa que se puede hacer sobre la escala es la marcación (el cabo a 30º por babor, A a 150º por babor y B a 120º por estribor) pues lo que leemos es el ángulo que forman la línea proa-popa del barco, o sea el rumbo, y el propio objeto (definición de marcación). Para trazar sobre la carta la demora tomada con el radar en modo Norte Arriba bastará con marcar directamente su valor y si hemos usado el modo Rumbo Arriba ya sabemos que el valor de la marcación on obtenida lo aplicamos a la fórmula D = R +/- M y obtendremos el valor de la demora, valor que trazaremos en la carta. 3.7 GNSS. Global Navigation Satellite System (Sistema Global de Navegación por Satélite Global), es el significado de sus siglas. Se entiende por GNSS, al conjunto de sistemas de navegación por satélite , como son el GPS (EEUU), GLONASS (Rusia) y el reciente Galileo (Europa). Es decir, los sistemas que son capaces de dotar, en cualquier punto y momento, de posicionamiento espacial y temporal. Los orígenes del GNSS se sitúan en los años 70 con el desarrollo del sistema militar estadounidense GPS (Global Positioning System), destinado al guiado de misiles, localización de objetivos y tropas etc., que a pesar de llamarse global no lo es. Es cierto que tiene cobertura mundial pero es un sistema de uso exclusivamente militar cuyo control estaba bajo el DoD (Department of Defense) de los Estados Unidos, y sometido a un estricto control gubernamental. Con el paso del tiempo y con vista a un uso exclusivo para fines civiles nace el GNSS. Un receptor de GNSS es capaz de determinar su posición en cuatro dimensiones (longitud, latitud, altitud, y tiempo), lo que ha dado lugar a multitud de aplicaciones civiles. Vocabulario relacionado: WPT, COG, SOG, XTE, ETA, MOB, Dátum: WPT: Acrónimo de WAYPOINT (Punto de la derrota a seguir). Cuando preparamos la derrota que haremos durante la navegación podemos ir almacenando, en la memoria del receptor, aquellos puntos o lugares que sean de nuestro interés. Cada uno de ellos recibe el nombre de WAYPOINTS. COG: Siglas de COURSE OVER GROUND (Rumbo XTE respecto al fondo de la mar). Es el rumbo que sigue el barco en relación al fondo. En ausencia total de viento y corriente éste rumbo coincidirá con el Rumbo Verdadero, en presencia de viento el COG será el Rumbo de superficie y con viento y corriente, o sólo con corriente, coincidirá con el Rumbo efectivo. SOG: Siglas de SPEED OVER GROUND (Velocidad respecto al fondo de la mar). Al igual que en el caso del COG, esta velocidad será la debida a la máquina propulsora exclusivamente (coincide con la velocidad del buque), la resultante de la composición de la velocidad del buque y la del viento en su caso (coincide con la Velocidad de Superficie) o la resultante de componer la del buque con la del viento y la corriente o, sólo con la de la corriente (coincide con la Velocidad Efectiva). XTE: Siglas de CROSS TRACK ERROR (Caída de derrota). Mide, en cada instante, la distancia entre la posición actual del barco y el rumbo directo entre el punto de salida y el de llegada. 88 ETA: Acrónimo de ESTIMATED TIME OF ARRIVAL (Tiempo Estimado de llegada). Indica tiempo estimado para llegar al próximo WAYPOINT o al punto de destino. MOB: Siglas de MAN OVER BOARD (Hombre al Agua). Éste es un botón, en rojo y protegido por una tapa transparente, que se accionará en el momento en que alguien cayera a la mar, quedando memorizada en el receptor la posición de caída. Instantes después, nunca menos de 30 segundos, se pulsará de nuevo dicho botón y aparecerá en pantalla el rumbo y la distancia que habrá que navegar para volver al punto de caída del náufrago. Dátum: Es el punto de referencia tomado por los satélites para medir la distancia y altura de cada punto de la carta náutica. En base a estos dos parámetros el sistema calcula las coordenadas de un punto. Según la zona por la que se vaya a navegar se han establecido diversos Dátum por eso es muy importante asegurarse de que el receptor que vaya a adquirir puede trabajar con los Dátum que usted necesita y de que tiene seleccionado en el receptor el Dátum correspondiente a la zona por la que va a navegar. Lógicamente, la inmensa mayoría de los receptores pueden trabajar con los Dátum de uso más común. Importancia de trasladar la posición del equipo GNSS a la carta de papel: Hay que tener claro que el receptor GNSS no es una Carta Electrónica, con él sólo vamos a obtener las coordenadas de la posición del barco en un instante concreto. Por ello debemos trasladar siempre dicha posición a la carta náutica y así podremos tener presente toda la información que ya sabemos que nos da la carta (bajos, peligros para la navegación, perfil de costa, boyas, faros etc.). La buena práctica marinera recomienda trazar la derrota del viaje a efectuar sobre la carta náutica y, posteriormente, trasladar las coordenadas de los WAYPOINT que creamos interesante a la memoria del receptor. De ese modo iremos comprobando y controlando, durante toda la travesía, nuestra posición y nuestra seguridad durante la navegación. Además, no debemos olvidar que la electrónica, aunque segura, puede sufrir averías y, si nos basamos sólo en ella, cuando aparezcan nos habremos quedado sin ninguna referencia de confianza de la que partir para seguir navegando mediante posicionamiento manual (astronómico o costero). 3.7 CARTAS ELECTRÓNICAS. Tipos de cartas electrónicas: Cartas escaneadas: Reproducciones fieles de las cartas de papel. Esta versión presenta el inconveniente de no poder actualizarse con las correcciones de los Avisos a los Navegantes y de perder calidad cuando se utilizan escalas pequeñas, siendo preciso cambiar de número de carta para las aproximaciones y para marcar grandes derrotas. Cartas vectoriales: reproducciones de los datos de cartas electrónicas siguiendo tramas de vectores que muestran con fidelidad los datos reproducidos en las cartas de papel. La ventaja es que se pueden actualizar y que las ampliaciones reproducen los detalles según se incrementa la escala, actuando como si se cambiase de carta a portulano, por ejemplo. Importancia de las cartas en papel: Insistir en que no debemos olvidar que la electrónica, aunque segura, puede sufrir fallos y si sólo hemos ido usando las cartas electrónicas, en caso de avería nos habremos quedado sin ninguna referencia de confianza de la que partir para seguir navegando mediante posicionamiento manual (astronómico o costero). 3.7 AIS. Automatic Identification System (Sistema de Identificación Automática), es un sistema de radiocomunicación entre barcos que opera en la banda marítima de VHF, capaz de manejar más de 4500 mensajes por minuto y sus correspondientes actualizaciones cada 2 segundos. Cada barco con AIS tiene un equipo con un transmisor VHF y dos receptores VFH para señales TDMA y otro receptor VHF para señales DSC. Los datos de posicionamiento y navegación son obtenidos desde el GPS del barco que está conectado al sistema AIS y los equipos electrónicos de navegación. En intervalos de 2 a 10 segundos se actualizan los datos de cada barco, como son el ratio de giro expresado en grados por minuto, la velocidad con una resolución de décima de nudo, la posición GPS y el rumbo. Cada 6 minutos también se actualizan datos importantes pero no tan prioritarios como son el número de MMSI, el número de IMO correspondiente al barco, la señal de llamada por radioteléfono correspondiente el barco, el nombre del barco, el tipo de barco, las dimensiones del barco en metros, el calado actual de la embarcación, su posición de destino, y la hora y fecha estimada de llegada UTC. Su presentación es como la de una pantalla de radar en la que aparecen, superpuesta a la imagen eco del radar, la cartografía digitalizada del lugar con sus sondas y detalles destacables, en la que además se superpone un icono por cada barco que está en la zona con una flecha que indica el vector desplazamiento, ofreciendo información del rumbo y su velocidad. Cada icono corresponde por tanto a una embarcación 89 cercana y el tamaño representado será proporcional a su tamaño real y con un posicionamiento con exactitud de GPS. Haciendo clic con el ratón sobre cualquiera de estos barcos aparece una ventana con la información del barco indicándonos su nombre, rumbo exacto y velocidad actual, lista de clasificación, frecuencia de radio para contactar con él, su número de registro, e incluso información de maniobra. Aparecen datos de cálculo como por ejemplo el punto en el que estaremos más próximos a él (CPA), cuando ocurrirá esta máxima aproximación (TCPA) y si el buque está virando indicará el ratio de giro. PRESENTACIÓN DE PANTALLA AIS 90