diseño de un sistema de almacenamiento de energía para un
Anuncio

UNIVERSIDAD PONTIFICIA COMILLAS
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI)
INGENIERÍA INDUSTRIAL ELÉCTRICA
PROYECTO FIN DE CARRERA
DISEÑO DE UN SISTEMA DE
ALMACENAMIENTO DE ENERGÍA
PARA UN TRANVÍA BASADO EN
VOLANTE DE INERCIA
ALFONSO ALONSO MORENO
MADRID, junio de 2009
Autorizada la entrega del proyecto al alumno:
Alfonso Alonso Moreno
EL DIRECTOR DEL PROYECTO
Julio Lucas Torralba
Fdo:
Fecha:
Vº Bº del Coordinador de Proyectos
Tomás Gómez San Román
Fdo:
Fecha:
Resumen
iii
Resumen
El potencial agotamiento de los combustibles fósiles unido a la creciente conciencia
social en cuestiones medioambientales está motivando en nuestros días un profundo
cambio en la forma de desarrollar la ingeniería. Las nuevas líneas de investigación se
orientan cada vez más en la búsqueda de soluciones tecnológicas comprometidas con
el medio ambiente y con la sociedad. En este marco surge el proyecto de diseñar y
construir un acumulador de energía para aplicación en los medios de locomoción
urbana alimentados con energía eléctrica que permita mejorar su eficiencia energética y
disminuir el rechazo social que tiene la implantación de catenarias en las ciudades.
Por otra parte, los sistemas clásicos de almacenamiento de energía son de difícil
aplicación en sistemas ferroviarios debido a los altos requerimientos de potencia y
energía de estos transportes, lo que motiva la búsqueda de soluciones alternativas.
La aparición de potentes métodos de cálculo como el de los elementos finitos
asociados al desarrollo de los sistemas informáticos, permite acelerar y reducir costes
en el desarrollo de prototipos, pues se pueden obtener resultados muy fiables sin
necesidad de realizar múltiples ensayos y pruebas.
En este contexto se plantea el desarrollo de un prototipo de sistema de
almacenamiento de energía para su aplicación en tranvías. El objetivo que se persigue
es múltiple. Por una parte se pretende reducir el consumo, recuperando la energía
cinética perdida por el vehículo al detenerse en cada estación. Típicamente, el
decremento de energía cinética que experimenta el tranvía al frenar se disipa en
zapatas de freno o en resistores embarcados en el tren en forma de calor vertido al
entorno. El objetivo buscado es poder almacenar esta energía de forma que pueda
reutilizarse posteriormente. Además, el desarrollo de este sistema permite al vehículo
circular sin necesidad de alimentación eléctrica de forma continuada. Esto implica la
posibilidad de prescindir parcialmente de catenaria con la consiguiente mejora en la
estética urbana y aceptación social de este tipo de transportes.
Desde el punto de vista técnico, el sistema se basa en un acumulador de energía
cinética de rotación basado en un volante de inercia de fibra de carbono. Dicho volante
lleva incorporada una máquina eléctrica síncrona de imanes permanentes que actúa
Resumen
iv
como convertidor bidireccional de energía y permite recargar el acumulador cuando
existen excedentes de energía debido al frenado, y a su vez, es capaz de alimentar la
máquina motriz principal del vehículo durante determinados periodos de tiempo,
pudiéndose prescindir de catenaria en algunos tramos del recorrido.
El desarrollo del proyecto parte del estudio de las tecnologías existentes en materia
de acumuladores cinéticos de energía. Tras esta fase, se procede al diseño conceptual
del prototipo, estableciéndose la geometría más adecuada y los materiales a emplear.
Una vez determinada la arquitectura del sistema se desarrolla el diseño de los módulos
principales.
Se comienza diseñando el rotor de la máquina estudiando el problema
analíticamente y determinando así los parámetros más críticos en el diseño. A partir de
este diseño, se construye el modelo de elementos finitos y se optimiza su geometría. Se
han empleado materiales de alta tecnología como materiales compuestos de fibras de
carbono y vidrio y aleaciones de aluminio de alta calidad empleadas en la industria
aeroespacial. Para completar el diseño del rotor se ha realizado un estudio detallado de
fatiga para garantizar la robustez del dispositivo.
La elevada velocidad de rotación del volante hace necesaria la incorporación de un
sistema de cojinetes magnéticos que minimicen las pérdidas al máximo y garanticen el
estado de carga del volante durante un tiempo razonable. El diseño y optimización de
este sistema se ha realizado por medio de elementos finitos obteniéndose un modelo
numérico de la planta que permita desarrollar el sistema de control propuesto en fases
posteriores. Para minimizar el gasto energético se ha diseñado el sistema de levitación
con una combinación de electroimanes e imanes permanentes de NdFeB.
El diseño de la máquina eléctrica se presenta al final del proyecto. Se ha escogido la
tecnología de máquina síncrona de imanes permanentes por su elevada potencia
específica que la hace ideal para esta aplicación.
Finalmente se ha desarrollado el modelo tridimensional del sistema por medio de
CAD, en el que se han incorporado el resto de componentes necesarios para el
funcionamiento del sistema como la vasija de vacío y el blindaje de contención, los
cojinetes de aterrizaje y el sistema de sustentación giroscópico, obteniéndose los planos
definitivos del prototipo y su diseño final.
Summary
v
Summary
The potential exhaustion of fossil fuels together with the increasing social
conscience in environmental questions is motivating in our days a deep change in the
form to develop engineering. New line of investigation is oriented more and more in
the search of technological solutions engaged with environment and the society. In this
frame the project arises to design and to construct a storage cell of energy for
application in urban locomotion fed with electrical energy that allows to improve its
power efficiency and to diminish the social rejection that has the implantation of
catenary wires in the cities.
On the other hand, the classic systems of energy storage are of difficult application
in railway systems due to the high requirements of power and energy of these
transports, which motivates the search of alternative solutions.
The appearance of powerful methods of calculation like the one of the finite
elements to the development of the computer science systems, allows to accelerate and
to reduce costs in the development of prototypes, because very trustworthy results can
be obtained with no need to make manifold tests and tests.
Against this background the development of a prototype of system of storage of
energy for its application in trams considers. The objective that is persecuted is
multiple. On the one hand it is tried to reduce to the consumption, recovering the lost
kinetic energy by the vehicle when stopping in each station. Typically, the decrement
of kinetic energy that experiences the tram when restraining dissipates in shoes of
brake or resistors embarked in the train. The main feature of the device is to be able to
store this energy so that it can be reused later. In addition, the development of this
system allows the vehicle to move with no need of continued power supply. This
implies the possibility of operating without catenary with the consequent
improvement in aesthetic and the social acceptance of this type of transports.
From the technical point of view, the system is based on a storage cell of kinetic
energy of rotation based on a steering wheel of carbon fiber. This steering wheel takes
built-in a synchronous electrical permanent magnet machine that acts as bidirectional
converter of energy and allows recharging the storage cell as well when they exist
Summary
vi
excessive of energy due to the braking. Moreover, the performance of the device is able
to feed the main engine of the tram during certain periods of time, being able to do
without catenary in some sections of the route.
The development of the project leaves from the study of the existing technologies in
the matter of kinetic storage cells of energy. After this phase, one comes to the
conceptual design from the prototype, settling down the most suitable geometry and
the materials to use. Once determined the architecture of the system the design of the
main modules is developed.
It is analytically begun designing the rotor of the machine studying the problem and
determining therefore the most critical parameters in the design. From this design, the
model of finite elements is constructed and its geometry is optimized. Carbon and
glass fibers and high performance aluminum alloy have been used in the construction
of the machine. This kind of high technology materials are being used high in the
aerospace industry. In order to complete the design of the rotor, a detailed study of
fatigue has been made to guarantee the robustness of the device.
The high speed of rotation of the steering wheel makes the incorporation necessary
of a system of magnetic bearings that diminish the losses to the maximum and
guarantee the state of load of the steering wheel during a reasonable time. The design
and optimization of this system have been made by means of finite elements obtaining
a numerical model of the plant that allows developing the system of control in later
phases. In order to diminish the power cost of the system of levitation a special
arrangement of coil actuators and permanent magnets has been designed.
The design of the electrical machine appears at the end of the project. The
technology of synchronous permanent magnet machine has been chosen by its high
specific power that makes ideal for this application.
Finally the three-dimensional model of the system by means of CAD has been
developed, in which the rest of necessary components for the operation of the system
like casing of emptiness, the bearings of landing and the gyroscopic system of
levitation has been gotten up, obtaining the definitive planes of the prototype and their
final design.
Índice
vii
Índice
1 INTRODUCCIÓN .............................................................................................................................. 2
1.1 Introducción a los dispositivos de almacenamiento de energía cinética
y situación tecnológica actual ........................................................................... 2
1.1.1
Conceptos básicos
2
1.1.2
Tecnología
4
1.1.3
1.1.2.1
Tecnología del rotor .................................................................................................................. 4
1.1.2.2
Cojinetes ..................................................................................................................................... 7
1.1.2.3
Carcasa ....................................................................................................................................... 9
1.1.2.4
Convertidor de potencia........................................................................................................... 9
1.1.2.5
Sistema de control ................................................................................................................... 10
1.1.2.6
Máquina eléctrica .................................................................................................................... 11
Parámetros de funcionamiento
12
1.1.3.1
Capacidad ................................................................................................................................ 12
1.1.3.2
Eficiencia .................................................................................................................................. 13
1.1.3.3
Autodescarga ........................................................................................................................... 14
1.1.3.4
Voltaje ....................................................................................................................................... 14
1.1.3.5
Potencia y Energía................................................................................................................... 15
1.1.3.6
Vida útil .................................................................................................................................... 15
1.1.3.7
Temperatura de operación ..................................................................................................... 15
1.1.4
Fabricantes
1.1.5
Referencias bibliográficas y direcciones web de los principales fabricantes e
investigadores.
16
19
1.1.5.1
Referencias bibliográficas....................................................................................................... 19
1.1.5.2
Direcciones web de los principales fabricantes e investigadores ..................................... 24
1.2 Motivación del proyecto .................................................................................. 26
1.3 Objetivos y metodología de trabajo ............................................................... 29
1.3.1
Directrices generales
29
1.3.2
Potencia y Energía. Elección de la solución técnica.
30
1.3.3
Dimensionamiento del volante
30
1.3.4
Máquina eléctrica
31
1.3.5
Cojinetes magnéticos y pérdidas
31
1.3.6
Carcasa y acoplamiento Cardán
32
1.3.7
Sistema de control
32
1.4 Herramientas empleadas................................................................................. 33
1.5 Especificaciones técnicas y predimensionamiento del sistema ................. 34
1.5.1
Introducción
34
Índice
viii
1.5.2
Especificaciones generales
34
1.5.2.1
Especificaciones de potencia y energía................................................................................. 34
1.5.2.2
Especificaciones geométricas y mecánicas........................................................................... 36
1.5.2.3
Especificaciones adicionales .................................................................................................. 38
1.5.2.4
Otras condiciones .................................................................................................................... 39
1.5.3
Funcionamiento general del sistema
39
1.5.4
Predimensionamiento del sistema
40
1.5.4.1
Introducción ............................................................................................................................. 40
1.5.4.2
Predimensionamiento de los volantes.................................................................................. 40
1.5.4.3
Predimensionamiento de un volante en acero de alta resistencia .................................... 42
1.5.4.4
Predimensionamiento de un volante en fibra de carbono ................................................. 45
2 DISEÑO DEL ROTOR .................................................................................................................... 49
2.1 Introducción ...................................................................................................... 49
2.2 Esfuerzos mecánicos ........................................................................................ 50
2.2.1
Introducción
50
2.2.2
Efecto giroscópico
52
2.2.3
Par motor, peso, desequilibrios de masa y vibraciones
55
2.3 Materiales aplicados......................................................................................... 56
2.3.1
Introducción
56
2.3.2
Material para el eje del rotor
58
2.3.3
2.3.2.1
Aleaciones de aluminio .......................................................................................................... 58
2.3.2.2
Elección de la aleación. Vida a Fatiga ................................................................................... 61
2.3.2.3
Determinación del límite de Fatiga del eje de Al 7475-T651 ............................................. 65
Material para el volante del rotor
2.3.3.1
2.3.4
67
Fibra de carbono con matriz de resina Epoxi T300/2500................................................... 67
Material para los anillos de fijación de las armaduras del sistema de guiado. Fibra de
vidrio unidireccional Scotch /Epoxi.
71
2.3.5
Material para la armadura móvil del cojinete radial. Laminado compuesto
73
2.3.6
Material para la armadura móvil de los cojinetes axiales
74
2.4 Tensiones de diseño ......................................................................................... 75
2.5 Estudio analítico del rotor ............................................................................... 76
2.5.1
Introducción
76
2.5.2
Modelado del problema
77
2.5.3
Desarrollo de las ecuaciones relevantes
82
2.5.4
2.5.3.1
Cilindro de pared gruesa presurizado interna y externamente. ....................................... 83
2.5.3.2
Cilindro de pared gruesa. Efectos rotacionales. .................................................................. 85
2.5.3.3
Carga equivalente de los imanes pi(w)................................................................................. 86
2.5.3.4
Superposición de efectos ........................................................................................................ 87
Optimización del modelo. Análisis paramétrico
92
Índice
ix
2.5.4.1
Estudio del eje.......................................................................................................................... 94
2.5.4.2
Estudio del volante ............................................................................................................... 104
2.6 Análisis de fatiga. Optimización de δ ......................................................... 107
2.6.1
Introducción
107
2.6.2
Diagramas del Al 7475-T651 para el análisis de fatiga.
108
2.6.3
Modelado del historial de carga. Tensiones alternas equivalentes
113
2.6.4
Daño Acumulativo. Duración con vida finita
115
2.6.5
Elección del valor de ajuste. Estudio comparativo
117
2.7 Diseño definitivo;
cálculo con elementos finitos y contraste de
resultados. ....................................................................................................... 122
2.7.1
Introducción
122
2.7.2
Análisis del eje
125
2.7.3
2.7.4
2.7.2.1
Distribución de tensiones y desplazamientos. .................................................................. 125
2.7.2.2
Evolución de las tensiones y los desplazamientos con w ................................................ 132
2.7.2.3
Margen de seguridad en duración. Vida a fatiga.............................................................. 135
Análisis del volante
139
2.7.3.1
Distribución de tensiones y desplazamientos ................................................................... 139
2.7.3.2
Evolución de las tensiones y desplazamientos con w ...................................................... 146
Acoplamiento del Sistema de guiado
149
2.7.4.1
Ajuste de las armaduras de los cojinetes. Fibra de vidrio................................................ 149
2.7.4.2
Esfuerzos y deformaciones en el ajuste. Fuerzas de contacto ......................................... 150
2.7.4.3
Esfuerzos en la fibra de vidrio ............................................................................................. 152
2.7.4.4
Esfuerzos y deformaciones en las armaduras del cojinete radial ................................... 153
2.7.4.5
Esfuerzos y deformaciones en las armaduras de los cojinetes axiales. Materiales ....... 155
3 SISTEMA DE GUIADO ................................................................................................................ 160
3.1 Introducción .................................................................................................... 160
3.2 Fundamentos teóricos .................................................................................... 162
3.2.1
Introducción
162
3.2.2
Circuitos magnéticos
162
3.2.3
Fuerzas magnéticas. Tensor de Maxwell
166
3.2.4
Imanes permanentes. Punto de BHmáx. Elección del material para los imanes
168
3.2.4.1
Introducción ........................................................................................................................... 168
3.2.4.2
Punto de BHmáx. ..................................................................................................................... 171
3.3 Cojinetes axiales.............................................................................................. 173
3.3.1
Introducción. Geometría del sistema de guiado axial
173
3.3.2
Directrices de diseño y requisitos
174
3.3.3
Materiales aplicados.
176
3.3.4
Diseño del cojinete axial superior
178
3.3.4.1
Aproximación analítica ........................................................................................................ 179
Índice
x
3.3.5
3.3.4.2
Diseño del cojinete axial superior por EF........................................................................... 182
3.3.4.3
Comportamiento dinámico .................................................................................................. 191
3.3.4.4
Parámetros eléctricos del devanado del cojinete superior ............................................... 194
Diseño del cojinete axial inferior
195
3.3.5.1
Dimensionamiento del sistema ........................................................................................... 195
3.3.5.2
Obtención de las curvas de fuerza frente a densidad de corriente para distintos
entrehierros ........................................................................................................................................... 198
3.3.6
3.3.5.3
Comportamiento dinámico .................................................................................................. 199
3.3.5.4
Parámetros eléctricos del devanado del cojinete inferior ................................................ 201
Diseño conceptual del sistema de control del sistema axial de levitación
202
3.4 Diseño conceptual de los cojinetes radiales ................................................ 204
4 MÁQUINA ELÉCTRICA .............................................................................................................. 208
4.1 Introducción .................................................................................................... 208
4.2 Geometría de la máquina .............................................................................. 210
4.2.1
Caja de aislamiento en fibra de vidrio
211
4.2.2
Disposición de los imanes
212
4.2.3
Estator
214
4.2.4
Materiales aplicados
216
4.3 Cálculo del par ................................................................................................ 217
4.4 Potencia activa máxima desarrollada por la máquina .............................. 219
4.5 Tiempo de recarga del sistema ..................................................................... 220
4.6 Punto de trabajo de los imanes permanentes ............................................. 221
4.7 Devanados. Número de conductores por ranura ...................................... 222
5 DISEÑO FINAL .............................................................................................................................. 226
5.1 Parámetros generales del sistema ................................................................ 226
5.2 Vistas principales........................................................................................... 227
5.3 Carcasa y sistema de sustentación giroscópico .......................................... 229
5.4 Volante de inercia ........................................................................................... 230
5.5 Bloque del motor ............................................................................................ 231
BIBLIOGRAFÍA ................................................................................................................................... 236
PLANOS................................................................................................................................................. 242
Introducción
xi
Índice de Figuras
Figura 1.1 : Comparación de la densidad de potencia en función de la densidad de energía
entre diversas tecnologías y combustibles, (Kulkarni, March, 1982) ...................................... 2
Figura 1.2: Ejemplo de simulación para obtener las especificaciones de potencia y energía del
sistema (operación sin catenaria). .............................................................................................. 35
Figura 1.3: Posible configuración del sistema empleando dos volantes de inercia........................ 37
Figura 1.4: Esquema de funcionamiento general del sistema. .......................................................... 39
Figura 1.5: Volante de núcleo parabólico. Esfuerzo de Von Mises [Pa]........................................... 44
Figura 1.6: Volante convencional con llanta y cubo ........................................................................... 45
Figura 2.1: Diseño conceptual del rotor del ECOTRANS. Modelo axisimétrico. ........................... 49
Figura 2.2: Desplazamiento radial de la pared del volante debida a la fuerza centrífuga ............ 51
Figura 2.3: Diseño conceptual del sistema de acoplamiento propuesto para la eliminación de
pares giroscópicos. ....................................................................................................................... 54
Figura 2.4: Obtención de las curvas SNP(Monsalve, 2003)................................................................ 61
Figura 2.5: Curva SNP del aluminio 2024-T3 (Monsalve, 2003)........................................................ 62
Figura 2.6: Curva S-N Al 7075-T7351 (Valencia, 2003). ...................................................................... 62
Figura 2.7: Comparativa curvas S-N para tres de las aleaciones propuestas (Verma, 2001).
Datos para 2024-T3, (Osgood, 1982); 7075-T6 (Verma, 1997) ................................................. 63
Figura 2.8: Tasa de crecimiento de grietas para una amplia gama de aleaciones comerciales
(Boyer, 1986) ................................................................................................................................. 64
Figura 2.9: Curva S-N del Al 7475-T651 superplástico. (Boyer, 1986).............................................. 65
Figura 2.10: Alineación de la fibra y sistema de referencia empleado en el análisis con EF
para definir las ctes. elásticas del composite. .......................................................................... 69
Figura 2.11: Ratios de Poisson para direcciones L y T. Nota: νij es el ratio de Poisson
correspondiente a un contracción en j cuando se aplica una extensión en i. ....................... 70
Figura 2.12: Modelo axisimétrico simplificado del rotor para el estudio analítico de las
tensiones. ....................................................................................................................................... 76
Figura 2.13: Elemento diferencial para el cálculo del momento de inercia polar del rotor........... 78
Figura 2.14: Modelado del rotor para el estudio analítico. ................................................................ 81
Figura 2.15: Elemento diferencial para el estudio de las tensiones mecánicas en el rotor. ........... 83
Figura 2.16: Carga equivalente de los imanes pi(w). A wmax=13.500 rpm, pi=76.9 MPa ............... 87
Figura 2.17: σrAL(ri) vs w y δ y carga pi (w) de los imanes. ................................................................ 95
Figura 2.18: Presión de ajuste pf en función de w y δ para dos diseños extremos. ........................ 96
Figura 2.19: Efecto de la interferencia δ en la presión de ajuste para dos diseños extremos. ....... 97
Figura 2.20: Tensión acimutal y equivalente Von Mises en el eje para distintos valores del
espesor de pared .......................................................................................................................... 98
Introducción
xii
Figura 2.21: Estudio paramétrico de la tensión del eje en función del espesor de pared e para
distintos valores del ajuste δ..................................................................................................... 102
Figura 2.22: Estudio de la tensión equivalente en el eje en función de w para distintos valores
del espesor de pared e y del zunchado δ. ............................................................................... 104
Figura 2.23: Representación de las tensiones máximas en el composite en función de w y δ
para tres espesores de la pared del eje. ................................................................................... 106
Figura 2.24: Evolución de la tensión equivalente en el eje para la geometría propuesta con
distintos ajustes δ barriendo todo el intervalo considerado. ............................................... 108
Figura 2.25: Criterios para el estudio de la fatiga con tensiones medias distintas de cero.......... 109
Figura 2.26: Diagrama de Haigh del Al 7475-T651 para distintas vidas. ....................................... 110
Figura 2.27: Diagrama de Goodman para el Al 7475-T651. Fuente: elaboración propia. ............ 111
Figura 2.28: Curva S-N aproximada del Al 7475-T651 con modificación del límite de fatiga .... 113
Figura 2.29: Estudio de fatiga para el ajuste A .................................................................................. 118
Figura 2.30: Estudio de fatiga para el ajuste B ................................................................................... 119
Figura 2.31: Estudio de fatiga para el ajuste C .................................................................................. 120
Figura 2.32: Situación de los estados tensionales equivalentes para cada valor de ajuste
contemplado. Cada diseño da lugar a dos puntos, el correspondiente a los ciclos de
gran y de pequeña amplitud que hemos definido anteriormente....................................... 121
Figura 2.33: Diseño definitivo del rotor. ............................................................................................ 124
Figura 2.34: Distribución de la tensión radial σr [MPa] en el eje a w0. (deformada x50) ............. 126
Figura 2.35: Tensión y desplazamiento radial en función del radio en el plano ecuatorial del
eje a w=0. ..................................................................................................................................... 126
Figura 2.36: Distribución de la tensión acimutal [Pa] en el eje a w0. (deformada x50) ................. 127
Figura 2.37: Tensión acimutal del eje en función del radio en la sección A a w0 .......................... 127
Figura 2.38: Distribución de la tensión equivalente Von Mises [Pa] en el eje a w0. (deformada
x50) ............................................................................................................................................... 128
Figura 2.39: Tensión equivalente de Von Mises en función del radio en la sección A a w=0. .... 128
Figura 2.40: Detalle de tensiones [Pa] y deformación en el punto B a w=0. (deformada x50). ... 129
Figura 2.41: Distribución de tensión radial [Pa] en el eje a wmax. (deformada x50) ...................... 129
Figura 2.42: Tensión y desplazamiento radial del eje en la sección A a wmax. ............................... 130
Figura 2.43: Distribución de tensión acimutal [Pa] en el eje para wmax. (deformada x50) ........... 130
Figura 2.44: Tensión acimutal y equivalente Von Mises en función del radio en la sección A
para wmax ..................................................................................................................................... 131
Figura 2.45: Distribución de tensión equivalente de Von Mises [Pa] en el eje para wmax
(deformada x50) ......................................................................................................................... 131
Figura 2.46: Evolución de la deformada y del desplazamiento radial [m] del eje con la
velocidad de giro. ....................................................................................................................... 133
Figura 2.47: Evolución del desplazamiento radial con la velocidad en el punto A del eje ......... 134
Introducción
xiii
Figura 2.48: Evolución de la tensión radial, acimutal y equivalente Von Mises con w en la
sección A del eje. ........................................................................................................................ 135
Figura 2.49: Diagramas de Haigh del Al7475-T651. En azul se representa el gráfico resultante
de aplicar el coeficiente de seguridad n. Los puntos representan las tensiones
oscilantes. .................................................................................................................................... 136
Figura 2.50: Curvas S-N del Al 7475-T651 con la aplicación sucesiva de K y n. La tensión
oscilante está dada en [Pa] y en el eje de abcisas representa N. .......................................... 137
Figura 2.51: Curva S-N de trabajo a partir de la que se han obtenido las esperanzas de vida
para cada tensión. Pa frente a número de ciclos N. ............................................................... 138
Figura 2.52: Distribución de tensión radial [Pa] en el composite de FC a w0 (deformada x50). . 139
Figura 2.53: Tensión radial del volante [Pa] en función del radio en el punto A a w0 y detalle
del ajuste con la FV..................................................................................................................... 140
Figura 2.54: Desplazamiento radial en el plano ecuatorial a w0 ..................................................... 140
Figura 2.55: Distribución de tensión acimutal [Pa] en el composite a w0 (deformada x50). ....... 141
Figura 2.56: Tensión acimutal en función del radio en el composite a w=0 (plano ecuatorial)
/ (deformada x50). ..................................................................................................................... 141
Figura 2.57: Desplazamientos radial y axial del composite a w=0. (deformada x50). ................. 142
Figura 2.58: Distribución de tensiones radial y acimutal [Pa] en el composite a wmax
(deformada x50) ......................................................................................................................... 143
Figura 2.59: Distribución de tensiones y deformaciones radial y acimutal en la FC a wmax
(deformada x50). ........................................................................................................................ 144
Figura 2.60: Distribución del desplazamiento radial del composite y dependencia con el
radio a wmax (deformada x50). .................................................................................................. 145
Figura 2.61: Evolución del desplazamiento con w [m] en la FC ..................................................... 146
Figura 2.62: Evolución del desplazamiento radial en el radio externo del volante/plano
ecuatorial (Punto B) ................................................................................................................... 147
Figura 2.63: Evolución de la tensión radial máxima de la FC (Punto A). ...................................... 147
Figura 2.64: Evolución de la tensión máxima acimutal en la FC (Pto A) (Valor máximo
admisible a tracción en dirección de la fibra 600 MPa, n=3). ............................................... 148
Figura 2.65: Detalle del sistema de fijación para las armaduras del sistema magnético de
guiado. Modelo axisimétrico de las armaduras superiores. ................................................ 149
Figura 2.66: Presión de ajuste entre la armadura del cojinete radial y la FV [Pa] ....................... 150
Figura 2.67: Deformación en el ajuste de la armadura del cojinete radial y presión de
contacto a rotor parado [Pa] (deformada x 50) ...................................................................... 151
Figura 2.68: Evolución de la presión de contacto armadura-fibra de vidrio y fibra de vidrioeje con w. ..................................................................................................................................... 151
Figura 2.69: Esfuerzos en la fibra de vidrio a rotor parado [Pa]. Los esfuerzos provienen del
ajuste a presión. .......................................................................................................................... 152
Introducción
xiv
Figura 2.70: Esfuerzos en la fibra de vidrio a wmax [Pa].................................................................... 152
Figura 2.71: Esfuerzos en la armadura del cojinete radial a rotor parado [Pa]. ............................ 153
Figura 2.72: Esfuerzos en la armadura del cojinete radial a máxima velocidad [Pa]. .................. 153
Figura 2.73: Evolución del desplazamiento radial [m] con la velocidad en la armadura del
cojinete radial.............................................................................................................................. 154
Figura 2.74: Desplazamientos en las armaduras de los cojinetes radiales..................................... 154
Figura 2.75: Tensión radial en la armadura del cojinete axial a máxima velocidad [Pa]............. 157
Figura 2.76: Tensión equivalente Von Mises en la armadura del cojinete axial a máxima
velocidad [Pa] ............................................................................................................................. 157
Figura 2.77: Distribución del desplazamiento radial a máxima velocidad en las armaduras
axiales [m]. .................................................................................................................................. 158
Figura 3.1: Ubicación del sistema de guiado. Modelo axisimétrico ............................................... 160
Figura 3.2:: Curvas de magnetización en CC para materiales de imanes permanentes más
comunes. (Fitzgerald, Kingsley, & Umans) ............................................................................ 168
Figura 3.3:Curvas características de imanes de NdFeB N35UH a distintas temperaturas de
trabajo. ......................................................................................................................................... 170
Figura 3.4: Circuito magnético para el desarrollo del punto de BHmáx (Fitzgerald, Kingsley, &
Umans) ........................................................................................................................................ 171
Figura 3.5: Detalle del sistema de cojinetes axiales. .......................................................................... 173
Figura 3.6: Curva BH para modelar el comportamiento magnético del acero de las llantas del
sistema de cojinetes axiales ....................................................................................................... 177
Figura 3.7: Modelo circuital para el predimensionamiento analítico del cojinete axial superior180
Figura 3.8: Campo B generado por los imanes permanentes en posición de equilibrio. Como
se puede apreciar el sistema trabaja lejos de la saturación (Bsat=1.7T)................................ 182
Figura 3.9: Campo B en el núcleo y la armadura del cojinete axial superior ................................ 183
Figura 3.10: Líneas de campo generadas por los imanes permanentes en posición de
referencia ..................................................................................................................................... 183
Figura 3.11: Punto de trabajo del imán x=0 / j=0. Se observa que el punto de trabajo está lejos
del campo desmagnetizante Hci=--968.5 kAv/m................................................................... 183
Figura 3.12: Distribución espacial de la fuerza magnética sobre la armadura del cojinete axial
superior x=0 / j=0 ...................................................................................................................... 184
Figura 3.13: Integración de (1) a lo largo de la armadura superior para el cálculo del empuje
de los imanes. Se observa en la figura un valor de F ≈ 3.15 kN. .......................................... 184
Figura 3.14: Distribución espacial del campo magnético B con rotor en posición inferior (x=1mm / j=6 A/mm2) ................................................................................................................... 185
Figura 3.15: Líneas de campo con el rotor en posición inferior y máxima corriente ................... 185
Figura 3.16: Campo desmagnetizante Hy del imán. (x= -1 mm / j=6 A/mm2) ........................... 186
Introducción
xv
Figura 3.17: Integración de la fuerza sobre la armadura superior para (x= -1 mm / j=6
A/mm2) ....................................................................................................................................... 186
Figura 3.18: Campo desmagnetizante Hy en el imán para la situación extrema (x=1 mm, j = 6 A/mm2). Como se puede apreciar en la figura, el valor absoluto de H es elevado y
mayor que en las situaciones previamente descritas, a pesar de que todavía se está
lejos del campo cohercitivo intrínseco a partir del cual se desmagnetiza el material
(Hci=-946 kAv/m). ..................................................................................................................... 187
Figura 3.19: Campo magnético en condiciones de corriente invertida fuera de margen ............ 188
Figura 3.20: Curvas de fuerza neta del cojinete superior frente a densidad de corriente para
distintos entrehierros. La zona de trabajo va desde el mínimo de cada curva hasta el
valor de densidad máxima admisible de 6 A/mm2 .............................................................. 189
Figura 3.21: Fuerza neta generada por el cojinete axial superior frente a la densidad de
corriente ....................................................................................................................................... 190
Figura 3.22: Respuesta transitoria de la fuerza neta sobre la armadura del cojinete axial
superior en posición inferior (x= -1 mm) excitando el devanado con un escalón de
corriente de 6 A/mm2................................................................................................................ 192
Figura 3.23: Respuesta transitoria de la fuerza neta sobre la armadura del cojinete axial
superior en posición de referencia (x=-0 mm) excitando el devanado con un escalón
de corriente de 6 A/mm2 .......................................................................................................... 192
Figura 3.24: Respuesta transitoria de la fuerza neta sobre la armadura del cojinete axial
superior en posición superior (x=-1 mm) excitando el devanado con un escalón de
corriente de 6 A/mm2 ............................................................................................................... 193
Figura 3.25: Respuesta dinámica de la fuerza sobre la armadura superior axial aplicando un
nivel de corriente de base de 1 A/mm2 y sometiendo al devanado a un escalón de
corriente de 6 A/mm2 . Se puede apreciar la mejora comparando esta respuesta con la
obtenida en la Figura 3.22. En el caso de no alimentar el devanado con una corriente
de polarización de 1 A/mm2 se obtiene una fuerza neta de 1500 N a los 5 ms. Sin
embargo, con la mejora propuesta se alcanza en el mismo instante una fuerza de casi
2000 N, lo que representa una mejora de casi un 30%. ......................................................... 194
Figura 3.26: Distribución de B en el electroimán inferior para x=1 mm, j=6 A/mm2. ................ 196
Figura 3.27: Líneas de campo para x=1 mm, j=6 A/mm2. .............................................................. 196
Figura 3.28: Resultado de la integración del Tensor de Maxwell sobre la armadura inferior
del sistema axial de levitación .................................................................................................. 197
Figura 3.29: Fuerza ejercida por el cojinete inferior en función de la densidad de corriente
que circula por la bobina para distintos valores de x correspondiente al margen de
operación establecido. ............................................................................................................... 198
Introducción
xvi
Figura 3.30: Respuesta transitoria de la fuerza sobre la armadura inferior del sistema axial
generada por el cojinete inferior ante un escalón de corriente de 6A/mm2 para
máximo entrehierro (3.6 mm), x= 1mm. ................................................................................. 199
Figura 3.31 Respuesta transitoria de la fuerza sobre la armadura inferior del sistema axial
generada por el cojinete inferior ante un escalón de corriente de 6A/mm2 para
posición de referencia del sistema (entrehierro=3.6 mm, x= 1mm). ................................... 200
Figura 3.32 Respuesta transitoria de la fuerza sobre la armadura inferior del sistema axial
generada por el cojinete inferior ante un escalón de corriente de 6A/mm2 para mínimo
entrehierro entrehierro (3.6 mm), x= 1mm. ............................................................................ 200
Figura 3.33: Figura 3.34: Respuesta transitoria de la fuerza sobre la armadura inferior del
sistema axial generada por el cojinete inferior ante un escalón de corriente de 6A/mm2
para máximo entrehierro (3.6 mm), x= 1mm y una corriente de base de 1 A/mm2. ........ 201
Figura 3.35: Esquema de control para el sistema axial de guiado .................................................. 203
Figura 3.36: Diseño de los octupolos del sistema de guiado axial .................................................. 204
Figura 3.37: Detalle del sistema de guiado superior. Modelo axisimétrico................................... 205
Figura 3.38: Ajuste de los octupolos sobre el bastidor de la máquina. Se puede apreciar el
hierro de la máquina eléctrica y los cojinetes de aterrizaje situados en cada uno de los
extremos de bastidor. El bastidor se ha diseñado hueco de forma que se pueda instalar
una superficie aleteada en su interior y refrigerar el sistema por convección forzada
instalando un pequeño ventilador en alguno de los extremos. ........................................... 206
Figura 4.1: Caja de fibra de vidrio para aislar la máquina eléctrica de la vasija de vacío ........... 211
Figura
4.2:
Funcionamiento
de
la
matriz
Halbach
(Wikipedia.http://en.wikipedia.org/wiki/Halbach_array) ............................................... 212
Figura 4.3: Red Halbach del rotor de la máquina y campo magnético generado. ....................... 212
Figura 4.4: Campo radial en el entrehierro en función el ángulo mecánico a la largo del
perímetro de media máquina ................................................................................................... 213
Figura 4.5: Fuerza magnetomotriz radial en el entrehierro en función del ángulo mecánico a
lo largo del perímetro de media máquina .............................................................................. 213
Figura 4.6: Chapa estatórica y devanados de la fase A .................................................................... 215
Figura 4.7: Curva BH para la chapa magnética del estátor. Acero al Si con recubrimiento de
Stabolit. Como se puede apreciar en la figura el codo de saturación de la curva se situa
en torno a 1.5 T, por lo que éste será el valor de trabajo del material para aprovec ......... 216
Figura 4.8: Integración del tensor de Maxwell para el cálculo del par electromagnético con
una corriente eficaz de 4A/mm2 .............................................................................................. 218
Figura 4.9 : Líneas de campo magnético para la máquina alimentada con corriente máxima
(4A/mm2) ................................................................................................................................... 218
Figura 4.10: Campo magnético con la máquina a plena carga. ....................................................... 219
Figura 4.11: Campo desmagnetizante máximo en los imanes del rotor. ....................................... 221
Introducción
xvii
Figura 4.12: Bloque del motor. ............................................................................................................. 224
Figura 5.1: Vista isométrica del sistema ............................................................................................. 227
Figura 5.2: Vista en planta .................................................................................................................... 227
Figura 5.3: Alzado ................................................................................................................................. 228
Figura 5.4: Perfil..................................................................................................................................... 228
Figura 5.5: Sección axial de la máquina completa. ........................................................................... 229
Figura 5.6: Blindaje de seguridad y vasija de vacío. ......................................................................... 229
Figura 5.7: Sección de la carcasa con el sistema de sustentación. ................................................... 230
Figura 5.8: Volante de inercia. ............................................................................................................. 230
Figura 5.9: Sección axial del volante de inercia/rotor. ..................................................................... 231
Figura 5.10: Bloque del motor. ............................................................................................................. 231
Figura 5.11: Sección axial del bloque del motor desvestido de imanes. ........................................ 232
Figura 5.12: Vista isométrica del bloque completo del motor seccionado axialmente. ............... 232
Figura 5.13: Semisección del volante. ................................................................................................. 233
Índice de Tablas
xviii
Índice de Tablas
Tabla 1.1: Capacidad teórica máxima de almacenamiento de energía para varios materiales
(página web Aspes Engineering AG). ......................................................................................... 6
Tabla 1.2: Características generales de las BEMs de alta y baja velocidad (DYNA Vol 83, nº7:
442) ................................................................................................................................................. 12
Tabla 1.3: Comparativa entre diversos fabricantes de BEMs y sus productos. .............................. 19
Tabla 1.4: Especificaciones geométricas y de masa para el sistema completo ................................ 37
Tabla 1.5: Parámetros de diseño para la opción de un único volante y para la de un par. ........... 46
Tabla 2.1: Valores orientativos del cortante máximo para la elección del sistema de fijación
de los imanes. ............................................................................................................................... 55
Tabla 2.2: Tensión equivalente para distintos tipos de cargas (Genta, 1985). ................................. 56
Tabla 2.3: Proveedores de aleaciones de aluminio de alta resistencia ............................................. 58
Tabla 2.4: Propiedades de las aleaciones de aluminio (I)................................................................... 59
Tabla 2.5: Propiedades de las aleaciones de aluminio (II) ................................................................. 60
Tabla 2.6: Coeficientes de fiabilidad para distintas probabilidades de fallo. .................................. 66
Tabla 2.7: Estimación de los coeficientes para el cálculo de la resistencia a fatiga S´f ................... 67
Tabla 2.8: Propiedades mecánicas del composite T300/2500 en direcciones longitudinal y
transversal a las fibras (L y T)..................................................................................................... 67
Tabla 2.9: Propiedades del composite como material isótropo para el estudio analítico. ............. 68
Tabla 2.10: Valores de las nueve constantes elásticas del composite de fibra de carbono
T300/2500 para el modelado con EF. ........................................................................................ 71
Tabla 2.11: Propiedades mecánicas del composite unidireccional de fibra de vidrio
Scotch/resina Epoxi en direcciones longitudinal y transversal a las fibras (L y T). .......... 72
Tabla 2.12: : Valores de las nueve constantes elásticas del composite unidireccional de fibra
de vidrio Scotch/resina Epoxi para el modelado con EF. ..................................................... 73
Tabla 2.13: Tensiones admisibles de trabajo para los materiales integrantes del rotor. ................ 75
Tabla 2.14: Parámetros geométricos, símbolos y propiedades de los materiales para el
estudio analítico del rotor. .......................................................................................................... 80
Tabla 2.15: Símbolos empleados en el desarrollo analítico de las tensiones. .................................. 82
Tabla 2.16: Símbolos para los parámetros geométricos y propiedades de los materiales del
eje.................................................................................................................................................... 87
Tabla 2.17: Símbolos para los parámetros geométricos y propiedades de los materiales del
volante. .......................................................................................................................................... 89
Tabla 2.18: Valores de los parámetros fijos y márgenes para las variables de diseño. El radio
ro se ajustará al final de forma que se obtenga la J necesaria para cumplir el requisito
de capacidad. ................................................................................................................................ 93
Índice de Tablas
xix
Tabla 2.19: Parámetros geométricos del rotor para el estudio de fatiga ........................................ 107
Tabla 2.20: Símbolos para los parámetros que caracterizan los dos tipos de ciclos de tensión
que solicitan el material del eje. ............................................................................................... 115
Tabla 2.21: Diseño definitivo. Parámetros del rotor ......................................................................... 123
Tabla 2.22: Tensiones máximas de trabajo de los materiales del rotor. ......................................... 123
Tabla 2.23: Caracterización de las tensiones oscilantes para el cálculo de la vida a fatiga del
eje obtenidos con EF. Valores en MPa. .................................................................................... 136
Tabla 2.24: Posible alternativa al acero AISI 4130 para el mecanizado de las armaduras de los
cojinetes axiales. Datos de www.matweb.com, www.ugitech.com y www.cadtech.com156
Tabla 3.1: Símbolos y unidades para los parámetros involucrados en el estudio del sistema
magnético de guiado ................................................................................................................. 162
Tabla 3.2: Valores de trabajo de los imanes de NdFeB N35UH a 120ºC. ....................................... 171
Tabla 3.3: Propiedades de los materiales empleados en el diseño del sistema de cojinetes
axiales .......................................................................................................................................... 178
Tabla 3.4: Resultados del predimensionamiento analítico del cojinete axial superior. ............... 181
Tabla 3.5: Dimensiones del cojinete axial superior ........................................................................... 182
Tabla 4.1: Valores de trabajo de los imanes de NdFeB N35UH a 120ºC. ....................................... 216
Tabla 4.2: Tensión de vacío inducida en la máquina para distinto número de conductores por
ranura. Máquina a plena carga J=4A/mm2, w=13.333 rpm. ................................................ 223
Tabla 5.1: Parámetros generales del sistema...................................................................................... 226
1
Introducción
1 Introducción
2
1 Introducción
1.1 Introducción a los dispositivos de almacenamiento de energía
cinética y situación tecnológica actual
1.1.1
Conceptos básicos
Los acumuladores de energía cinética, también llamados baterías electromecánicas
(BEMs), volantes de inercia o Flywheels en la literatura anglosajona, son dispositivos
que almacenan energía en masas giratorias en forma de energía cinética de rotación. La
energía almacenada en el sistema viene dada por la inercia de las masas rodantes y por
la velocidad angular a que éstas estén sometidas.
Por medio de una máquina eléctrica y un convertidor bidireccional de potencia se
puede transferir potencia al dispositivo por medio de un par acelerador y también
realizar la operación inversa de recuperar dicha energía decelerando el volante de
inercia e invirtiendo la máquina eléctrica, que pasaría a funcionar como generador
recuperando la energía que previamente
invirtió en acelerar dicho volante. Los
materiales del volante de inercia, el tipo de máquina eléctrica, los rodamientos y la
atmósfera de confinamiento determinan la eficiencia del dispositivo.
La
principal
ventaja de este tipo
de
acumuladores
es la posibilidad de
soportar
un
elevadísimo
número de ciclos
de
carga
descarga
de
y
(cientos
miles)
con
potencias altas (kW
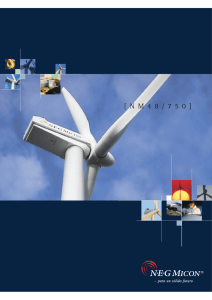
Figura 1.1 : Comparación de la densidad de potencia en función de la densidad
de energía entre diversas tecnologías y combustibles, (Kulkarni, March, 1982)
a
MW)
durante
cortos periodos de
1 Introducción
3
tiempo. Se pueden obtener tasas de energía específica almacenada de hasta 250Wh/kg
dependiendo de la tecnología. Además, la monitorización del estado de carga es
sumamente sencilla y fiable, pues basta conocer la velocidad angular del volante. La
vida útil de las BEMs es larga (>20años) y además, al contrario que las baterías clásicas
electroquímicas, no tienen residuos contaminantes.
Algunos inconvenientes son el alto costo derivado de la elevada complejidad técnica
que precisan estos sistemas para almacenar elevadas cantidades de energía específica y
las pérdidas relativamente altas, que son en el mejor de los casos de un 20% de la
energía acumulada por hora.
Existen distintos tipos de tecnologías que se pueden dividir en sistemas de alta y
baja velocidad, entendiéndose por alta velocidad los valores mayores a 6000 rmp y que
pueden llegar hasta las 50.000 rmp. Además se pueden subdividir en sistemas
estacionarios y en embarcados en vehículos orientados a la tracción (trenes, trolebuses,
metros e incluso coches) presentado importantes diferencias técnicas debido a sus
diferentes requerimientos y restricciones. Actualmente las BEMs son una realidad
comercial, sobre todo las de baja velocidad, existiendo más de una docena de
fabricantes. En el caso de las BEMs de alta velocidad se están actualmente empezando
a desarrollar productos comerciales, aunque es un campo que está en completa
evolución y desarrollo.
Las tecnologías y capacidades varían significativamente según sean volantes de alta
o baja velocidad. En principio, los discos que giran altas velocidades se suelen emplear
para almacenar energía y los de bajas velocidades para entregar alta potencia. En el
caso de baja velocidad se suelen emplear volante de acero y rodamientos
convencionales o mixtos (magnéticos-convencionales). Las BEMs de alta velocidad
requieren el empleo de materiales compuestos (fibras de carbono o vidrio) que
presentan muy buenas propiedades mecánicas y bajo peso, lo que es deseable en el
caso de sistemas embarcados y permite llegar a altas velocidades e interesantes tasas
de almacenamiento de energía específica. Además, deben incorporar rodamientos
magnéticos y una atmosfera de vacío o de algún gas de baja densidad para reducir
pérdidas aerodinámicas y rozamientos. Otra ventaja de los volantes de fibra de
carbono con respecto a los tradicionales de acero, es que su posible rotura no presenta
graves problemas ya que las fibras que componen el volante se van desprendiendo de
1 Introducción
4
forma progresiva y con movimiento rotacional en caso de superarse la velocidad
crítica, y son fácilmente retenidas por la carcasa, no siendo así en el caso de volantes de
acero que rompen típicamente de forma violenta fragmentándose en tres o cuatro
porciones con alta energía cinética que podrían causar accidentes en caso de que la
carcasa no los pudiese retener.
Sus aplicaciones van desde fuentes de alimentación ininterrumpida (SAIs), sistemas
de potencia híbridos, catenarias de trenes y metros (volantes asistiendo subestaciones),
vehículos híbridos y satélites espaciales. Este proyecto se centra fundamentalmente en
los sistemas embarcados orientados a mejorar la gestión de energía de trenes de
cercanías, tranvías y metros. Concretamente, se desarrollará un sistema para tranvías
que permita su funcionamiento sin catenaria de forma parcial o total.
1.1.2
Tecnología
1.1.2.1 Tecnología del rotor
La energía cinética que acumula una masa girando viene dada por la ecuación
siguiente,
1
Ec = I ⋅ w2 (1)
2
Donde I representa el momento de inercia y w la velocidad angular. El momento de
inercia es función de la masa y de la forma geométrica del sistema giratorio.
I = ∫ x 2 ⋅ dm
m
Donde x es la distancia del elemento dm al eje de rotación x.
En el caso de un volante de inercia donde la masa se concentre en una llanta de
radio R, el momento de inercia vale,
I = m⋅ R2 (2)
1 Introducción
5
De (1) y (2) se tiene,
1
Ec = mR2 w2 (3)
2
Donde se aprecia que la velocidad angular es más importante que la masa para
obtener una gran acumulación de energía, pues está elevada al cuadrado.
El límite tensional del material es el que impone la máxima velocidad de rotación
posible. Siguiendo con el ejemplo anterior, la tensión en función de la velocidad toma
la siguiente forma:
σ = ρR 2 w2
Con lo que para una tensión máxima admisible
σ max
tendríamos el máximo valor
de w para operar el volante. Por lo tanto, la capacidad máxima de almacenamiento de
energía será:
1 σ
Ec max = m max
2
ρ
Lo que demuestra que interesan materiales de alta resistencia mecánica
σ max y baja
densidad ρ, propiedades que presentan los materiales compuestos polimérico
reforzados con fibras. En la se presentan los ratios máximos teóricos de energía
específica acumulable para distintos materiales.
En un dispositivo estacionario, el peso del volante no es un factor limitante, con lo
que se pueden obtener grandes capacidades a velocidades no muy altas trabajando con
volantes de alto momento de inercia, y pudiéndose emplear materiales como el acero,
más fáciles de trabajar y menos costosos que los compuestos (del orden de 20÷30 más
barato que los materiales compuestos). Pero en el caso de aplicaciones con volante
embarcado el objetivo fundamental es obtener altos ratios de energía por unidad de
masa (energía específica) manteniendo el peso del dispositivo lo menor posible.
Siguiendo con el ejemplo propuesto, la energía específica obtenida a partir de (3) será:
1 Introducción
6
e=
ρ [kg m-3]
σ max
2⋅ ρ
σmax [MPa]
Límite teórico Ec específica
[Wh kg-1]
Acero (AISI 4340)
7800
1800
Aleación (AlMnMg)
2700
600
32
31
Titanio (TiAl6Zr5)
GFRP Polímero reforzado
Con fibra de vidrio
(60 vol% E-glass)
CFRP Polímero reforzado
Con fibra de carbono
(60 vol% HT Carbon)
4500
1200
37
2000
1600
111
1500
2400
222
Tabla 1.1: Capacidad teórica máxima de almacenamiento de energía para varios materiales (página web Aspes
Engineering AG).
Otro importante parámetro a considerar es el par que la máquina eléctrica puede
desarrollar, ya que, junto con la velocidad angular, determinarán la máxima potencia
que el volante puede ceder o captar según la ecuación:
P = Tw
A muy bajas velocidades, el dispositivo presenta poca potencia, aún teniendo un
par grande (lo cual es deseable hasta cierto punto, pues demasiado par implica una
máquina eléctrica de mayor tamaño y por tanto peso). Es decir, a bajas velocidades, el
volante no es operativo. Si definimos:
s=
wmin
(4)
wmax
Se puede decir en términos generales que dicho cociente no debe ser inferior a 0.2.
Por lo tanto, si tenemos por ejemplo s=1/3, la energía útil para operar será, según (4),
un 90% de la capacidad máxima del volante.
E = Emax (1 − s 2 )
1 Introducción
7
Por otra parte, cuando se trata de BEMs sustentadas magnéticamente, debemos
atender a las propiedades eléctricas y magnéticas del material del rotor. En caso de
disponer de un rotor de alguna aleación ferromagnética levitando con cojinetes
magnéticos, hay que contabilizar el efecto disipativo por efecto Joule que producirán
las corrientes parásitas inducidas por el funcionamiento natural de dichos cojinetes.
Estas corrientes inducidas se pueden minimizar laminando el material, lo cual en
principio es una solución problemática ya que un rotor laminado soportaría esfuerzos
notablemente menores que otro macizo, y en cualquier caso, sería costoso y
complicado de mecanizar.
Otro parámetro del que dependerán dichas corrientes inducidas es la conductividad
del material, que se debe procurar de bajo valor, lo cual puede ser complicado ya que
la naturaleza de los ferromagnetos es inherentemente conductora.
1.1.2.2 Cojinetes
El diseño y elección de los cojinetes es un paso crucial en el desarrollo del sistema,
pues son una fuente de pérdidas, aunque no la más importante (también existen
pérdidas por corrientes parásitas en el rotor, pérdidas aerodinámicas en la atmósfera
residual e importantes pérdidas en los convertidores electrónicos de potencia) y su
mantenimiento debe ser
relativamente fácil y poco costoso. Los rodamientos
mecánicos convencionales son una fuente de pérdidas energéticas, sobre todo a altas
velocidades, precisan una buena lubricación y exigen mantenimiento periódico por su
desgaste. Para evitar este tipo de problemas las BEMs se proyectan con cojinetes
magnéticos asistiendo a rodamientos convencionales de alta calidad (aliviado
magnético de la carga), o exclusivamente con cojinetes magnéticos. La elección de una
u otra opción depende de la aplicación concreta, las velocidades de rotación, el coste,
etc.
En cualquier caso, las BEMs disponen siempre de cojinetes convencionales,
necesarios para el aterrizaje del volante sobre ellos cuando se desconecta el sistema o
en caso de que ocurra una sobrecarga de cualquier tipo.
En cuanto al diseño conceptual de los cojinetes magnéticos, se emplean
normalmente potentes imanes de neodimio como elemento pasivo para obtener un
1 Introducción
8
campo magnético constante y fuerte que soporte la mayor parte de la carga. Pero
debido a la inestabilidad intrínseca de dichos imanes, el sistema debe poseer
electroimanes que controlen las posibles desviaciones con respecto a la posición de
equilibrio mediante un sistema de control en lazo cerrado.
Existen otras soluciones basadas en materiales superconductores, que aprovechan el
comportamiento diamagnético de éstos una vez alcanzada la temperatura de
superconducción mediante un sistema de criogenización.
Argonne National Laboratory ha desarrollado cojinetes superconductores de alta
temperatura (HTS) con unas pérdidas extremadamente pequeñas. Este excelente
sistema de sustentación presenta pérdidas menores que los rodamientos magnéticos
convencionales en más de dos órdenes de magnitud, y si comparamos con rodamientos
mecánicos convencionales, la mejora no da lugar a dudas. Con este tipo de cojinetes, se
podrían desarrollar BEMs de excelente rendimiento, pues las pérdidas en los cojinetes
representarían tan solo algo menos del 2%, incluyendo las pérdidas necesarias para la
refrigeración del sistema superconductor. Como inconveniente de esta solución, cabe
resaltar la necesidad de un subsistema criogénico que permita mantener a los
elementos superconductores a su temperatura de operación.
El consumo de la
criogenia debe, a todos los efectos, considerarse como una pérdida del sistema de
cojinetes.
En otro proyecto, Argonne y Boeing están trabajando para desarrollar BEMs con
rodamientos HTS. En este tipo de sistema, la levitación se basa en las fuerzas atractivas
entre imanes permanentes situados sobre el volante y el propio volante que también
incorpora imanes, y se emplea el HTS para conferir rigidez, estabilidad y capacidad de
control al cojinete.
La mayoría de los fabricantes han desarrollado sus propias soluciones, que son
combinación de lo expuesto anteriormente. Por ejemplo, la BEM de Active Power
emplea una combinación de rodamientos de bolas cerámicos sobre pista de acero con
un empuje magnético que pretende disminuir la carga de los rodamientos para
prolongar su durabilidad básicamente.
1 Introducción
9
Por su parte, La BEM de Urenco se decanta por un sistema menos rígido auto
regulado que consiste en un cojinete magnético pasivo sobre el volante y otro
convencional en la parte inferior del eje vertical de tipo convencional de alta calidad.
Al final de éste apartado se presenta un pequeño estudio comparativo entre las
distintas soluciones adoptadas por varios fabricantes.
1.1.2.3 Carcasa
Para reducir pérdidas aerodinámicas cuyo par resistente es función de la velocidad,
de la densidad y de la presión del gas que rodea al volante, se puede confinar el
dispositivo en una carcasa con vacío parcial o rellena de algún gas menos denso que el
aire como el helio. En caso de altas velocidades de giro se opta por realizar el vacío
total, lo que perjudica los mecanismos de refrigeración de la máquina eléctrica y la
lubricación y mantenimiento de los rodamientos mecánicos.
Otro importante atributo de este componente es su función protectora. La enorme
cantidad de energía que se acumula en el volante, puede verse liberada súbitamente en
caso de destrucción accidental por exceso de velocidad y la carcasa debe ser capaz de
soportar los impactos de los fragmentos. En el caso de materiales compuestos, la rotura
de las fibras es progresiva y por ello entraña menor peligro que en el caso de volantes
de acero, que se fragmentan en pocos trozos que estallan violentamente contra las
paredes de la carcasa, y que son potencialmente peligrosos.
Una buena solución que aúna los requisitos de ligereza y funcionalidad es la fibra
de vidrio. Este material compuesto presenta un estupendo comportamiento ante los
impactos, es ligero, y no es excesivamente costoso.
1.1.2.4 Convertidor de potencia
El convertidor bidireccional de potencia se encarga de acoplar la máquina eléctrica a
la red. Por tanto, será de una etapa (Máquina eléctrica (AC -> red DC)), o de dos etapas
(Máquina eléctrica (AC -> red DC -> red AC)), según los requerimientos del sistema.
Cuando se trate de una red DC el convertidor consistirá en un puente trifásico de
1 Introducción
10
conmutadores funcionando como fuente de voltaje (VSI) y controlado con modulación
de ancho de pulso (PWM). La tecnología concreta de los semiconductores de
conmutación (MOSFET, IGBT,GTO…) dependerá de las tensiones de bloqueo,
intensidades de conducción necesarias y frecuencias de conmutación. El inversor
también se ocupará de controlar el funcionamiento de la máquina eléctrica como
generador o como motor. El rendimiento de la interfaz electrónica puede llegar a plena
carga al 90%, sin embargo este valor cae para cargas bajas. Las pérdidas en los
semiconductores son proporcionales a la frecuencia de conmutación, pero altas
frecuencias también implican menor rizado de corriente y del par de la máquina
eléctrica, por lo que siempre hay que buscar un compromiso razonable.
En el caso de acoplamiento AC, al conjunto anterior habría que añadirle un inversor
bidireccional, acoplándolo con un condensador como acoplamiento de continua.
Finalmente, se requerirá el control de potencia y monitorización de los flujos a
través del convertidor. En el caso de trabajar con una red AC, debemos monitorizar y
controlar los flujos de potencia activa y reactiva.
1.1.2.5 Sistema de control
El lazo de control se ocupa de mantener el estado de carga en el nivel deseado
controlando la velocidad del volante, así como evitar que se superen las velocidades
límite entre las que se debe operar. También se ocupará de llevar el volante desde su
estado de reposo a la velocidad mínima operativa controlando la potencia de entrada
para que el par que se le aplica no supere el valor especificado y por tanto la corriente
se mantenga en valores adecuados.
En el caso de cojinetes magnéticos, el sistema de control se ocupará de la estabilidad
y el control de posición del volante y reaccionará ante las perturbaciones que puedan
surgir tales como vibraciones y otros tipos de inercias.
1 Introducción
11
1.1.2.6 Máquina eléctrica
Es el dispositivo encargado de convertir la energía mecánica de rotación del volante
de inercia en energía eléctrica. Cuando tenemos un excedente de energía en el sistema
(frenado regenerativo, carga directa) la energía acciona la máquina eléctrica que acelera
el volante incrementando la energía de éste. Por el contrario, al decelerar el volante la
máquina actúa como generador suministrando potencia eléctrica. En las BEMs de alta
velocidad, la máquina y el volante se integran en un mismo bloque formando un solo
elemento compacto, que generalmente está inmerso en una atmósfera especial, de
vacío o de algún gas de baja densidad. Para las BEM de bajas velocidades se opta por
integrar parcialmente ambos componentes o mantenerlos separados en un
confinamiento común.
Existen varias alternativas en la elección de la máquina para las BEM. Las máquinas
asíncronas son robustas, sencillas y baratas, pero presentan elevadas pérdidas en el
hierro y cobre del rotor.
También se ha propuesto la utilización de máquinas síncronas de reluctancia
variable, aunque la densidad de potencia es reducida y se producen pérdidas en el
rotor debido a las ranuras.
Por otra parte la máquina de reluctancia conmutada permite obtener densidades de
potencia altas, gran robustez en el rotor y una elevada velocidad de conmutación entre
el modo motor y el generador. Siendo sus inconvenientes un mal factor de potencia
que requiere un convertidor sobredimensionado, y un elevado ruido acústico asociado
a las conmutaciones de las fases.
Finalmente tenemos la opción de las máquinas síncronas de imanes permanentes,
que eliminan las pérdidas correspondientes al cobre del rotor y son la opción más
empleada en las BEMs de altas velocidades. Dentro de la gran familia de las máquinas
síncronas, la de más exitosa aplicación en BEMs de alta velocidad es la configuración
Halbach con disposición de imanes permanentes, que permite eliminar también o
disminuir las pérdidas correspondientes al hierro. Dicha configuración consiste en una
disposición cíclica de imanes permanentes que permite tener flujo muy intenso en uno
de los lados mientras que en el otro es prácticamente nulo. Como contrapartida, este
tipo de máquinas corren el peligro de desmagnetizarse, tienen reducida resistencia al
1 Introducción
12
esfuerzo tensil, debido a la necesidad de mantener adheridos los imanes permanentes
al rotor, y precio muy elevado.
A continuación se resumen las características diferenciales comentadas entre los
sistemas de alta y baja velocidad:
BEMs de bajas velocidades
BEMs de altas velocidades
Material del volante
de inercia
Acero
Materiales compuestos: fibras de vidrio
y carbono
Máquina eléctrica
Asíncrona, de imanes permanentes y de
reluctancia variable
De imanes permanentes (Halbach) y de
reluctancia variable
Sin integración o con integración parcial
Integración total o parcial
Vacío parcial o gas ligero (He)
Vacío total
Peso de la carcasa
2 x Peso volante de inercia
½ x Peso volante de inercia
Rodamientos
Mecánicos o mixtos (mecánicos y
magnéticos)
Magnéticos
Aplicaciones
Calidad de la energía (SAI, suavizamiento
perfiles potencia, etc)
Tracción e industria aeroespacial
Integración del
volante y la máquina
Atmósfera interior de
la carcasa
Tabla 1.2: Características generales de las BEMs de alta y baja velocidad (DYNA Vol 83, nº7: 442)
1.1.3 Parámetros de funcionamiento
1.1.3.1 Capacidad
El rango de capacidades de un rotor actualmente varía de 0,5 a 10 kWh. La
capacidad disponible en el rotor es directamente proporcional al cuadrado de la
velocidad angular, y no se ve afectada por cambios en la temperatura ambiente ni por
el número de ciclos de carga descarga que haya sufrido el dispositivo hasta el
momento. Esto supone una notable ventaja con respecto a las baterías clásicas de
plomo-ácido. Además, el estado de carga del volante es sumamente sencillo de
monitorizar, pues basta conocer la velocidad angular de giro en cada momento. En
cuanto a la capacidad útil del volante, se comentó que depende de la velocidad mínima
de diseño a la que vaya a operar dicho volante. Sin embargo, es teóricamente posible
1 Introducción
13
aumentar este margen de energía útil bajando el valor de la velocidad mínima, aunque
hay que tener en cuenta que esto sólo sería posible para tasas muy pequeñas de carga y
descarga, con poca potencia y poco par.
Sin embargo, existen distintas configuraciones que hacen posible incrementar la
capacidad del sistema, como conectar en paralelo varios módulos por medio de un bus
DC. Esta es la alternativa que propone Active Power, que ha desarrollado un sistema
de 7 kWh a 2 MW empleando 8 rotores, y la tecnología de Urenco puede almacenar
hasta 25 kWh a 2.1MW para aplicaciones de tracción. 1
1.1.3.2 Eficiencia
Múltiples son las pérdidas en las BEMs, y todas ellas contribuyen a la eficiencia
global del dispositivo. Entre ellas podemos contabilizar las pérdidas eléctricas (estator
y/o rotor de la máquina según el caso, convertidor electrónico de potencia, pérdidas
por fricción aerodinámica, fricción en los rodamientos, pérdidas por corrientes
parásitas en los rotores de acero en presencia de cojinetes magnéticos, etc. Sin embargo,
las pérdidas dominantes en el sistema provienen de la conmutación en el sistema de
conversión de energía (usualmente más del 80% de las totales).
Las mejores tasas conseguidas por algunos fabricantes llegan al 96%, valor más que
satisfactorio.
Un valor de la eficiencia global del dispositivo más general puede tomarse en torno
al 90%. Este valor cae con tasas pequeñas de carga/descarga. Esta caída de
rendimiento, se debe fundamentalmente a las pérdidas de conmutación en el
convertidor.
1
Al final del capítulo se presenta un pequeño estudio de la tecnología desarrollada por cada fabricante, analizándose
una docena de ellos.
1 Introducción
14
1.1.3.3 Autodescarga
La autodescarga es el fenómeno que va disminuyendo la energía acumulada en el
sistema cuando éste no está en uso. Este fenómeno se puede analizar desde dos
perspectivas; en circuito abierto (convertidor totalmente apagado) situación en la cual
las pérdidas solo son imputables al volante incluyendo los cojinetes, y en circuito
cerrado, es decir, cuando el dispositivo permanece en stand-by y por tanto el
convertidor permanece encendido para mantener la velocidad constante, por ejemplo.
Los fabricantes suelen proporcionar valores referidos al estado de stand-by.
Es por ello que las BEMs no se deben proyectar como sistemas de almacenamiento
energético ni a medio ni largo plazo.
Además, si el dispositivo no funciona cíclicamente de forma continuada, el
rendimiento también se verá gravemente afectado, pues la energía almacenada en el
volante se va perdiendo a lo largo del tiempo con una tasa que varía según el caso,
dentro del rango de entre 18% al 200% de la energía máxima almacenable (capacidad)
por hora.
1.1.3.4 Voltaje
El convertidor electrónico de potencia es imprescindible en todos los casos y se
puede adaptar a los niveles de tensión requeridos por el sistema. La variable básica que
controla la velocidad del volante/motor/generador es la frecuencia y voltaje AC
variable que suministra el convertidor. El convertidor DC es necesario en todos los
casos y el AC se incorpora en caso de que la BEM se conecte a una red AC. Los
fabricantes proporcionan convertidores adaptables a distintos niveles de tensión de
trabajo. Por ejemplo, UPS hace posible conectar su sistema a una red tanto DC como
AC de tipo estándar, o bien proporciona un convertidor que es capaz de trabajar con
varios niveles de tensiones DC (36, 48, 96 V) compatible con bancos de baterías.
1 Introducción
15
1.1.3.5 Potencia y Energía
Como se ha comentado anteriormente, la energía específica que puede almacenar
típicamente un rotor de acero es del orden de 5Wh/kg, mientras que aquellos
diseñados de materiales compuestos pueden llegar teóricamente a valores de más de
200 Wh/kg. En la práctica se han alcanzado valores de hasta 100 Wh/kg, bastante
menores que aquellos que arrojaban los cálculos teóricos. La potencia específica es una
función del volante de inercia, las velocidades a las que opera, la máquina eléctrica y el
convertidor electrónico de potencia y se han obtenidos ratios de hasta 1600 W/Kg. Sin
embargo, este valor puede llegar a verse reducido en un factor de 0.1 si se tienen en
cuenta las masas de todos los componentes del sistema BEM, incluyendo carcasa,
convertidor, sistema de vacío, de criogenización en su caso, etc.
1.1.3.6 Vida útil
Como estamos tratando al fin y al cabo de acumuladores de energía, es práctico
comparar éstos con las clásicas baterías de plomo-ácido en cuanto a vida útil, ciclos de
trabajo y residuos contaminantes.
Las BEM tienen enormes ventajas al respecto, pues pueden tener un número de
ciclos de trabajo que varía en el rango de 105 a 107 y que no depende de las tasas de
carga y descarga, ni de la forma en que éstas se producen. Dicho número de ciclos solo
se alcanza tras 20 años de continua carga/descarga hasta plena capacidad cada 100
minutos.
De forma general, podemos establecer un tiempo de vida útil de unos 20 años.
1.1.3.7 Temperatura de operación
La mayoría de los fabricantes establecen el rango de temperaturas de trabajo entre
los -20º C a los 40ºC. Sin embargo, cualquiera de los componentes del sistema puede
suponer una restricción a estos valores, por ejemplo alguno de los componentes
electrónicos del convertidor. Por lo general, la temperatura de trabajo dependerá de
múltiples factores como la configuración y lugar de instalación de la BEM. Así, una
1 Introducción
16
BEM encapsulada en una atmósfera de vacío podría incluso trabajar a temperaturas
inferiores a las especificadas.
Lo que está claro es que la limitación térmica en cualquiera de los casos será menos
problemática que un acumulador electroquímico tradicional.
1.1.4
Fabricantes
Se han encontrado diversos fabricantes de BEMs , de los cuales algunos ofrecen
productos comerciales y otros están todavía en distintas fases de desarrollo e
investigación. Los productos comerciales se orientan fundamentalmente a sistemas de
alimentación ininterrumpida (SAIs o UPSs) y tracción.
Algunas empresas que tienen BEMs comerciales o en fase de desarrollo en la
actualidad son las siguientes: Active Power (y Caterpillar), Acumentrics Corporation,
AFS Trinity Power Corporation, Beacon Power, Flywheel Energy Systems Inc.,
Pentadyne, Piller, Tribology Systems Inc., and Urenco Power Technologies. Active
Power es uno de los pocos fabricantes que trabajan con rotores de acero, pues la
mayoría están empleando materiales compuestos. Existen otros investigadores (
Argonne National Laboratory y Boeing) que siguen la línea de desarrollo de volantes
de inercia de bajo peso y alta velocidad, que emplean superconductores de alta
temperatura para el desarrollo los cojinetes magnéticos.
Un reciente estudio (European Emerging Energy Storage Technology Markets, Frost
& Sullivan, 2003) revela que un grupo reducido de fabricantes comparten el mercado a
nivel europeo, siendo Piller líder con un 47% del Mercado.
Las nuevas tecnologías de almacenamiento de energía están lideradas por las BEMs,
que suponen el 96% de las ventas y se espera un fuerte crecimiento, impulsado por la
promoción de las energías renovables por los estados y el marco regulatorio que las
acompaña.
1 Introducción
17
A continuación se presenta un resumen del estudio del estado del arte en el que se
analizan una docena de fabricantes y los productos que ofrecen de forma comercial o
en fase de desarrollo.
Active
Power
Acumentr
ics
Beacon
Power
Flywheel
En-ergy
Systems
MagnetMotor
comercial
comercial
Rotores
desarrollados,
sistema en
desarrollo
Comercial y
en desarrollo
Series 45 rotors
Emerging
products for
ACES, UPS,
PQ/HEV
Magnetodyna
mic storage
(MDS)
AFS
Trinity
Estado del
producto
comercial
Nombre
producto
CleanSource
DC
CleanSource
UPS
CleanSource2
Marketed by
Caterpillar:
Cat UPS
GenSTART
Power-Q
(PQ100, PQ175,
PQ250)
M3A 100kW
M4A 200kW
Smart Energy
series BHE-6
(2kW)
Smart Power
series BHP250 (250kW)
Rotor
Acero sólido
forjado 4340
Compuesto
Compuesto
fibra de
carbono
Compuesto
Compuesto
Compuesto
fibra de
carbono
Avanzados
BHE:magnéti
cos
Mecánicos
Rodamientos
mas soporte
magnético
1.5kW (UPS)
50 kW
(PQ/HEV)
5MW prueba
1.1kWh (PQ)
1.3kWh
(PQ/HEV)
80 MJ (22.2
kWh)
prototipo
Cojinetes
Carcasa
De bolas
cerámicos
con carcasa
de acero y
levantamient
o magnético
Hierro,
carcasa actua
de estator y
cámara de
vacío
comercial
Acero
inoxidable
Resistente al
ambiente
80 kW
140 kW
200 kW
Acero
Potencia
/rotor
250kW
Capacidad
/rotor
1kWh
approx.
0.44 kWh
0.56 kWh
0.55 kWh
0.42 kWh
2.0 kWh
Máxima
potencia y
capacidad
del
sistema
2000kW
7kWh
approx.
(8 rotores)
Montaje
modular en
paralelo
Montaje
modular en
paralelo
Velocidad
rotor
2500 – 7700
rev/min
Voltaje
350 – 550
Vd.c.
380/400/415
/480 Va.c. @
50 or 60 Hz
100 kW
200 kW
BHE: 2 kW
BHP: 250 kW
BHE: 6 kWh
BHP: 1.7 kWh
min.
matriz
250kW,
25kWh
/unidad
10 unidades,
2500 kW, 250
kWh
15000 – 45000
rev/min (UPS,
Series 45 rotor)
17500 – 35000
rev/min
(PQ/HEV,
Series 39 rotor)
40000
rev/min
480 V a.c. 3-ph.
(option 208V
a.c. on PQ100)
350-800 V d.c.
BHE: i/p 480
V a.c. 3-ph.;
o/p 36, 48, or
96 V d.c.
BHP: 480 V
a.c. 3-ph.
3-ph
1 Introducción
Aplicacio
nes
Pérdidas
Standby
Tasa
autodesca
rga
18
SAI
SAI aplicación
industrial
1.5 kW a máx
velocidad
SAI Calidad
y gestión de
potencia
BHE:
Telecoms.
UPS
BHP: calidad
potencia
Buses
urbanos
(desde 1988)
HEV
UPS
potencia
700 W (max)
<500W typ
(1.5xC)/h
Rendimiento a
plena carga
>95%
Eficiencia
Temperat
ura:
Operación
/
No
operación
-20°C a 40°C
-25°C a 70°C
Vida útil
25+ años
standby
>10,000
cycles
Optimal
Energy
Systems
-20°C a 45°C
-50°C a 65°C
-20°C a 40°C
> 100,000
ciclos
BHE: -40°C a
46°C
BHP: 0°C a
35°C
BHP: -20°C a
70°C
BHE: 20 años
Piller
Comercial
Producción
en serie
>500
instalaciones
todo el
mundo
comercial
FLB-E 150Wh
FLB-A
500Wh
En desarrollo
Nombre
producto
FpoM
FESM
FPMM
PCM
VSS-120
POWERBRID
GE
Rotor
Compuesto
Fibra de
grafito
Cilindro
compuesto
fibra de
carbono
Eje titanio
Disco de
acero
Compuesto
Magnéticos
Rodamientos
de bolas con
engrase
permanente
Híbridos
Bolas
cerámicas
Cojinetes
Acero
0.9 kWh
Typ 100,000
ciclos
Tribolog
Urencoy
Power
Systems Technolog
Inc (TSI) ies (UPT)
Pentadyn
e
Estado del
producto
Carcasa
Potencia
/rotor
Capacidad
/rotor
Máxima
potencia y
capacidad
del
sistema
Espacial
UPS
Calidad
potencia
HEV
comercial
UPT KESS
PQ250 (power
quality)
TR200 (traction)
Compuesto
110 kg
cilindrico
carbono, vidrio,
and MLC, con
brushless d.c.
motor/generad
or integrado
20 años sin
mantenimiento.
magneticos con
rodamientos de
pivote
hidrodinámicos.
Acero. 800Kg
RossetaTechnik
comercial
Rosseta T1
Rosseta T2
Compuesto
Resina Epoxi
y fibra de
grafito
120 KW
1300 KW
40 KW
250 KW máx
150 a 300 KW
0.67 kWh
4.6 kWh
0.5 kWh
2 kWh (min)
3 kWh (max)
2 to 6 kWh
Configuració
n paralelo
posible
12 máquinas
total:
2400 kW
36 kWh
1 Introducción
Velocidad
rotor
19
60000 rpm
Voltaje
Aplicacio
nes
SAI,
regulación
potencia, 100
kW to 100
MW
Aeroespacial.
Potencia
pulsada
Pérdidas
Standby
Tasa
autodesca
rga
55000 rpm
1800-3400
rpm
240 V a.c. 3-ph.
400 V d.c.
a.c. alternator
SAI
Calidad
Potencia
Vehículos
Híbridos
Mejora de la
eficiencia en
tracción.
Regulación
de carga en
redes locales.
Vida útil
580-900 V d.c.
380 V a.c
Vehículos
híbridos
Calidad
Potencia.
Traccion.
Cargas cíclicas.
Generación
insular
120 W typ.
(0.18 x C)/h
10kW
1.2kW
(0.18 x C)/h
(0.46 x C)/h
(1.67 x C)/h
95%
94% DC
91%AC
0 a 40°C
-30°C a 40°C
0°C a 40°C
0°C a 70°C
25 años
10000000
ciclos
20 años
10,000,000 (altos
ciclos)
500,000 (alta
capacidad, con
baja velocidad
mínima a baja
potencia)
Eficiencia
Temperat
ura:
Operación
/
No
operación
28000 rpm
27000 – 37800
rpm (ciclos
altos)
18000 – 37800
rpm(alta
capacidad)
-20°C a50°C
-20°C a 80°C
200000 ciclos
20 años
25000 rpm
550 – 1000 V
d.c.
400 V a.c.
Estabilización
de tensión en
sistemas
ferroviarios.
Freno
regenerativo
en HEVs
Regulación
picos de
carga..
20 años
5,000,000
ciclos
Tabla 1.3: Comparativa entre diversos fabricantes de BEMs y sus productos.
1.1.5 Referencias bibliográficas y direcciones web de los principales
fabricantes e investigadores.
1.1.5.1 Referencias bibliográficas
Bender D.A., Snyder P.K., DC power management with a high performance
flywheel, Electrical Energy Storage Systems Applications and Technologies EESAT
2002, April 2002, San Francisco.
1 Introducción
20
Beno J., et al., Composite Flywheels for Energy Storage – Design Considerations,
Electrical Energy Storage Applications and Technologies EESAT’02, San Francisco,
April 2002.
Bleijs J.A.M., et al, A flywheel energy storage system with fast response network
interface, Electrical Energy Storage Systems Applications and Technologies EESAT’98,
16-18 June 1998, Chester, UK.
Bolund, B. et al. “Flywheel energy and power storage systems”. Renewable and
Sustainable Energy Reviews. Volume 11, Issue 2, February 2007, Pages 235-258.
Bowes J.D., and Clark N., Flywheel energy storage and SuperConducting Magnetic
Energy Storage Systems IEEE PES 2000 Summer 2000 Seattle Washington July 19, 2000.
Carta J.A., et al., Operating results of a wind-diesel system which supplies the full
energy needs of an isolated village community in the Canary Islands, Solar Energy 74
(2003) pp53-63.
Cruz et al., 50kW modular wind/diesel system with a short-term storage system
based on high speed flywheel for islands electrification and seawater desalination,
International Conference: Renewable Energy Systems for Islands, Tourism, and
Desalination, May 2003, Crete.
Cruz I., et al., Dynamic simulation and sizing of an experimental wind/diesel
system with a high speed flywheel energy storage system. EWEC 2001, Copenhagen,
Denmark, July 2001.
Cruz I., et al., Assessment of Different Energy Storage Systems for Wind Energy
Integration. EWEC 2001, Copenhagen. Denmark, July 2001.
Cullen R.C.A., Electrical versus mechanical interfacing of flywheel energy storage in
wind-diesel systems, PhD thesis, Imperial College, London, March 1996.
Day A.C., et al., Development of long-life, low-maintenance flywheel electricity
systems, Electrical Energy Storage Systems Applications and Technologies EESAT
2000, September 2000, Orlando, Florida.
1 Introducción
21
Day A.C., et al., Flywheels with all-passive, non-contact magnetic suspensions,
Electrical Energy Storage Systems Applications and Technologies EESAT 2002, April
2002, San Francisco.
Emadi, A. et al. “Advances in Flywheel Energy-Storage Systems”. PowerPulse.net
by Darnell.Com Inc., March 19, 2001.
Frost & Sullivan, European Emerging Energy Storage Technology Markets, Feb 2003
Glenn Research Center, Marshall Space Fligth Center “Energy Storage Center”.
Spinoff 1996, DocID: 20020079098.
Gonzales et al, Hybrid wind diesel system for a village in the Canary Islands,
development and commissioning, ECWEC March 1993 Lubeck, Germany, pp 326-329.
Gonzales et al, Lessons learned during the commissioning and start up of a wind
diesel system with inertial storage in Fuerteventura Spain, EWEC '94 October 1994,
Thessaloniki, Greece, pp 1056-1060.
Hayes,R.J. et al “Design and Testing of a Flywheel Battery for a Transit bus” . SAE
International Congress and Exposition, March 1-4, 1999.PR 265.
Harke R., et al., Active filter with integrated flywheel, Electrical Energy Storage
Systems Applications and Technologies EESAT 2000, September 2000, Orlando,
Florida.
Hebner R.E. et al., Composite flywheels for energy storage – design considerations,
Electrical Energy Storage Systems Applications and Technologies EESAT 2002, April
2002, San Francisco.
Hebner R.E. et al., Flywheel batteries come around again, IEEE Spectrum, April
2002, pp 46 – 51.
Heiney, A “Reinventig the Wheel”, NASA explorers website. May, 26, 2004.
Hirose M., et al., Flywheel energy storage with superconducting magnetic bearing,
Electrical Energy Storage Systems Applications and Technologies EESAT 2000,
September 2000, Orlando, Florida.
1 Introducción
22
Hoffman, H. et al. “Synchronus reluctance motor/alternator for flywheel energy
storage systems” Power Electronics in Transportation, 1996. IEEE Volume, Issue, 24-25
Oct 1996 Page(s) 199-206.
Iglesias et al., Design and simulation of a stand-alone wind-diesel generator with a
flywheel energy storage system to supply the required active and reactive power.
Isherwood, W. et al., Remote power systems with advanced storage technologies for
Alaskan villages, UCRL_ID129289, Dec 1997.
Kashima N., et al., Development of a 1kWh flywheel energy storage system with
superconducting magnetic bearing, Electrical Energy Storage Systems Applications
and Technologies EESAT 2000, September 2000, Orlando, Florida.
Kondoh et al, Electrical energy storage systems for energy networks, Energy
Conversion and Management 41 (2000) pp 1863-1874.
Lazarewicz M., A description of the Beacon Power high energy and high power
composite flywheel energy storage systems, Electrical Energy Storage Systems
Applications and Technologies EESAT 2002, April 2002, San Francisco.
Miller J. et al., Investigation of Synergy Between Electrochemical Capacitors,
Flywheels, and Batteries in Hybrid Energy Storage for PV Systems, Sandia report
SAND99-1477, June 1999.
Reiner G., and Gunselman W., Flywheel energy storage systems in public
transportation systems, Electrical Energy Storage Systems Applications and
Technologies EESAT’98, 16-18 June 1998, Chester, UK.
Richey S., CleanSource2 battery-free energy storage theory of operation, Electrical
Energy Storage Systems Applications and Technologies EESAT 2002, April 2002, San
Francisco.
Ruddell A.J., Energy storage for renewable energy integration in electrical networks,
Electrical Energy Storage Systems Applications and Technologies EESAT’98, 16-18 June
1998, Chester, UK.
1 Introducción
23
Ruddell A.J., et al., Power converters for flywheel energy storage systems, JOR3CT95-0070 Final.
Ruddell, A. “Investigation on storage technologies for Intermittent Renewable
Energies: Evaluation and recommended R&D strategy” Investire-network Storage
Tecnology .Report ST6 Flywheel” Contract NºENK5-CT-2000-20336. Date: 2003-06-17.
Report, 1998 (The Publishable Final Report is available via the Cordis document
library database http://www.cordis.lu/ - use title as search terms). Also see summary
in Clean and efficient energies for Europe, Results of individual projects, EUR 14965/1,
ISBN 92-894-1129-1 European Commission 2001.
Sapowith, A.D. et al. “A composite flywheel burst containment study” . Lawrence
Livermore National Lab. Technical Report AVSD-0350-81-RR, April 08, 1982.
Schallenberg Rodriguez J.C., The Canary Islands: A world laboratory for RETdesalination http://insula.org/island2010
Schoenung S.M., Characteristics and technologies for long- and short-term energy
storage - A study by the DOE Energy Storage Systems Program, Sandia report
SAND010765.
Siebert, M. et al. “A Passive Magnetic Bearing Flywheel”, Glenn Technical Report
NASA/TM-2002-211159.February 2002.
Tarrant C.D., The Pirouette flywheel energy storage system, Electrical Energy
Storage Systems Applications and Technologies EESAT’98, 16-18 June 1998, Chester,
UK.
Taylor P. et al., A summary of the state-of-the-art of SMES, flywheel, and CAES,
Sandia report SAND991854, July 1999.
Ter-Gazarian A., Energy storage for power systems, ISBN 0 86341 264 5, Peter
Peregrinus Ltd., 1994.
Thoolen F.J.M, and Lommen W., Emafer: Electromechanical accumulator for energy
re-use, Electrical Energy Storage Systems Applications and Technologies EESAT’98, 1618 June 1998, Chester, UK.
1 Introducción
24
Townley D., Introducing Pentadyne Power Flywheel Energy Storage System,
Electrical Energy Storage Systems Applications and Technologies EESAT 2002, April
2002, San Francisco.
Urenco Power Technologies, ‘Harnessing windpower with kinetic energy’, Press
Release Dec 2001 http://www.uptkinetica.com/ .
Vajda I., Upgrading Electric Power Quality by Superconducting Flywheels, Physica
C Superconductivity and its Applications, 341-348 (2000) pp 2609-2610.
Von Burg P., and Allmeling J., Flywheel based power quality improvement in a
medium voltage grid, Electrical Energy Storage Systems Applications and
Technologies EESAT’98, 16-18 June 1998, Chester, UK.
Wagner R., Jansen R., Flywheel technology development at the NASA Glenn
Research Center, Electrical Energy Storage Systems Applications and Technologies
EESAT 2002, April 2002, San Francisco.
1.1.5.2 Direcciones web de los principales fabricantes e investigadores
Western
Power’s
Denham
Wind
Diesel
Project
http://www.westernpower.com.au/subsites/denham_wind_diesel/index.shtml
Active Power http://www.activepower.com/ (and Caterpillar) http://www.cat.com/
Acumentrics Corporation http://www.acumentrics.com/
AFS Trinity Power Corporation http://www.afstrinity.com/
Beacon Power http://www.beaconpower.com/
CCM http://www.ccm.nl (Centre for Concepts in Mechatronics)
Flywheel Energy Systems http://www.magma.ca/~fesi/index.html
International Computer Power http://www.rotoups.com/
Magnet-Motor http://www.magnet-motor.de/
1 Introducción
Optimal Energy Systems Inc. http://www.optimalenergysystems.com/
Pentadyne http://www.pentadyne.com/
Piller http://www.piller-gmbh.de/
Powercorp http://www.pcorp.com.au/
RPM http://home.earthlink.net/~fradella/homepage.htm
SatCon Power Systems http://www.inverpower.com/
Tribology Systems Inc. http://www.tribologysystems.com/
Urenco Power Technologies http://www.uptenergy.com
US Flywheel http://www.us-flywheel.com/ (Note: US Flywheel ceased business in
2003)
Rosseta-Technik http://www.rosseta.de
Boeing http://www.boeing.com/
http://www.boeing.com/news/releases/1998/news_release_980217c.html
Lawrence Livermore National Laboratory (LLNL) http://www.llnl.gov
Argonne National Laboratory http://www.anl.gov/
http://www.et.anl.gov/sections/te/research/flywheel.html
Oak Ridge National Laboratory http://www.ornl.gov/
http://www.ornl.gov/publications/labnotes/mar94/flywheel.html
Pennsylvania State University http://www.psu.edu/
The Center for Electromechanics, The University of Texas
http://www.utexas.edu/research/cem/
NASA Glenn Research Center http://space-power.grc.nasa.gov/ppo/ http://spacepower.grc.nasa.gov/ppo/projects/flywheel/techdet.html
The Office of Transportation technologies (OTT) of the US Department of Energy
(DOE) http://www.ott.doe.gov , http://www.ott.doe.gov/hev/flywheels.html
25
1 Introducción
26
ASPES AG http://www.aspes.ch/
University of Newcastle http://www.ncl.ac.uk/
http://www.ncl.ac.uk/eece/research/groups/drives/drv-proj.htm
University of Sheffield http://www.shef.ac.uk/
University of Sussex http://www.sussex.ac.uk/,
http://www.sussex.ac.uk/press_office/bulletin/30jan98/item2.html
Politecnico di Torino http://www.polito.it/index.en.html
Flysafe http://www.flysafe.ch
Electricity Storage Association http://www.electricitystorage.org/
Energy Storage Council http://www.energystoragecouncil.org/
Energy Technology Data Exchange http://bia.osti.gov/etdeweb/
1.2 Motivación del proyecto
Los sistemas ferroviarios actuales suponen una de las principales tecnologías para el
transporte tanto de personas como de mercancías en todo el planeta. Están en continuo
desarrollo ya que la energía primaria que emplean es la eléctrica, que es
completamente limpia en su utilización, es ampliamente conocida y gestionada, y
constituye probablemente el principal pilar energético sobre el que se sustenta toda la
industria y la civilización de nuestros días. El sistema eléctrico actual es con toda
seguridad el mayor sistema dinámico construido por la humanidad hasta nuestros
días.
El potencial agotamiento de los combustibles fósiles unido a la creciente conciencia
ambiental de nuestra sociedad ha motivado el desarrollo de nuevas tecnologías
renovables para generación de electricidad y ha cambiado la perspectiva y la forma de
1 Introducción
27
enfocar y gestionar el consumo de energía, habiendo una tendencia creciente y sólida
en la búsqueda de sistemas más eficientes energéticamente, más limpios y con
posibilidades de desarrollo futuro respaldados por la generación y gestión limpia de la
energía. Por tanto, es un objetivo primordial en la actualidad buscar la mejora de los
sistemas existentes en cuanto a eficiencia energética, indudablemente unida a una
reducción de los costes asociados al consumo de electricidad, y es uno de los objetivos
principales que se persiguen en este proyecto.
El desarrollo de acumuladores de energía cinética rotativos basados en volante de
inercia para acumulación de grandes cantidades de energía, ha motivado la idea de
adaptar dicha tecnología a sistemas ferroviarios para mejorar su gestión de consumo y
eficiencia. El problema se enfoca de forma natural a los sistemas ferroviarios de
transporte urbano tipo tranvía o transporte suburbano (metro), antes que a trenes de
largo recorrido. La elección es clara, puesto que dichos sistemas están sometidos
continuamente a aceleraciones y frenados por su propia naturaleza (subida y bajada de
pasajeros, señalización, etc.) que hacen que caiga su rendimiento por las pérdidas que
esto implica. Típicamente, la disminución de energía cinética que experimenta un
tranvía al frenar se disipa en forma de calor en unos resistores embarcados en el tren,
perdiéndose por tanto dicha energía en el ambiente, y en el mejor de los casos se
recupera parte de la energía y se devuelve a red con un frenado regenerativo. Con la
implantación de estos acumuladores de energía en subestaciones de alimentación a
catenarias, se podría realizar un redireccionamiento de dicha energía disipada en el
frenado, haciendo un frenado regenerativo, es decir, invirtiendo la máquina eléctrica
motriz del tranvía para que actúe de generador eléctrico a la hora de frenar, con lo que
se produce un par de frenado a la vez que se redirecciona la energía que antes se
disipaba en resistencias, y se envía a través de la catenaria a la subestación, acelerando
el volante de inercia, y quedando en él almacenada como energía cinética que
posteriormente se extraerá en los picos de demanda o cuando algún tren la requiera
para acelerar, suavizándose así las caídas de tensión en catenaria y la curva de
demanda. Unido a la potencial mejora de rendimiento que experimenta todo el
sistema, se puede reducir el tamaño de las subestaciones que gestionarán menos
energía de la red por estar apoyadas en dichos acumuladores.
Por lo tanto, queda patente la ventaja tecnológica que supone la incorporación de
acumuladores en cuanto a mejora de rendimientos globales, pero el enfoque de este
1 Introducción
28
proyecto pretende ir más allá. Se persigue embarcar estos acumuladores en tranvías
para, en el mejor de los casos, poder prescindir de catenaria y realizar la tracción
eléctrica alimentando el motor directamente de la energía acumulada en el volante de
inercia, que sería recargado con la energía de la red en las paradas y también mediante
la energía recuperada en el frenado regenerativo. En caso de que esto no fuera factible,
se prescindiría parcialmente de catenaria en determinados tramos del recorrido, en los
que la energía se obtendría como en el caso anterior, del volante de inercia, y se
recargaría en los tramos con catenaria además de aprovechando el frenado. Existe
además una posibilidad de diseño mixta que combinaría volantes de inercia con
baterías, que incrementarían notablemente la capacidad de almacenamiento de energía
del sistema. Se estudiará la opción de diseño más conveniente, estableciendo como
criterio principal para su elección y desarrollo el satisfacer de la forma más optima
posible los requerimientos de potencia y energía requeridos por el tranvía.
Por tanto, la motivación es múltiple. Por un lado se evitaría el tendido de catenarias
en las urbes (total o parcialmente) evitando los consiguientes problemas tanto técnicos
como sociales que esto acarrea. Por otra parte, se mejora la eficiencia energética del
sistema de tracción del tranvía, con el ahorro de costes que implica la disminución de
la demanda a red. Además, al ser un medio de transporte accionado por energía
eléctrica se disminuiría la polución del aire en las ciudades producida por las
emisiones de las tan extendidas máquinas térmicas. Como es una tecnología no
directamente dependiente de los combustibles fósiles (evidentemente de forma
indirecta sí, mientras la generación sea en plantas térmicas que empleen dichos
combustibles) es susceptible de funcionar en un futuro quizás no muy lejano en un
marco de generación con tecnologías renovables. Todo esto da un valor añadido a esta
nueva tecnología que sería bien recibida tanto por sus ventajas sociales como técnicas y
económicas.
1 Introducción
29
1.3 Objetivos y metodología de trabajo
1.3.1 Directrices generales
El proyecto persigue el desarrollo de un primer prototipo del sistema orientado
a su implantación en tranvías. Se diseñará y calculará la máquina eléctrica, el sistema
magnético de guiado y el rotor. Para el desarrollo del prototipo se debe estudiar la
geometría de los componentes principales y proponer una solución que se ajuste a los
requerimientos de funcionamiento del tren de la forma más satisfactoria posible. Se
escogerán y estudiarán los materiales integrantes de cada uno de los componentes. Se
pretende dimensionar dichos componentes y modelarlos con el método de los
elementos finitos para finalmente obtener un modelo tridimensional del prototipo con
ayuda de algún programa de CAD.
Se comenzará con el estudio detallado de los cojinetes magnéticos, para acabar
proponiendo una solución técnica concreta. Esta etapa será en la que más nos
centremos desde el punto de vista técnico. A partir de aquí se seguirá con el estudio del
volante de inercia que se realizará en varias etapas. Primeramente se desarrollará un
modelo conceptual y se elegirán materiales. Después se dimensionará y se simularán
los esfuerzos en régimen de trabajo.
En cuanto al enfoque y metodología de trabajo, se propone una perspectiva flexible
debido al carácter de investigación de este proyecto. Se trata de buscar una buena
solución técnica, que además sea factible económicamente, para llegar al boceto de un
primer prototipo.
Se parte de unas especificaciones concretas de potencia y energía del dispositivo
proporcionadas por el cliente y se barajarán distintas opciones y tecnologías que
satisfagan dichos requerimientos, como se explica en la motivación del proyecto.
Dichos requerimientos nos darán una primera idea de si es necesaria la incorporación
de baterías de apoyo al sistema.
La metodología de trabajo sigue las etapas naturales de diseño de cualquier sistema.
Se comienza realizando un estudio detallado de la física presente en el desempeño de
cada pieza, para proponer una geometría razonable sobre la que se trabajará. Se
buscará un enfoque analítico cuando sea posible para tener unas directrices de diseño
1 Introducción
30
que permitan disponer de unos órdenes de magnitud para desarrollar los modelos
numéricos con elementos finitos con alguna referencia. Una vez desarrollado el modelo
con elementos finitos de cada componente se trabajará en su optimización.
La carcasa, el sistema de fijación del dispositivo y el control se presentarán de
forma conceptual. Los objetivos expuestos a continuación suponen unas directrices
generales y están supeditados a las especificaciones del cliente, así como a las
restricciones técnicas y económicas que vayan surgiendo a medida que se desarrolla el
sistema.
1.3.2
Potencia y Energía. Elección de la solución técnica.
En primer lugar se debe atender a las especificaciones requeridas por el cliente
en cuanto a potencia disponible en la descarga del volante y potencia de carga.
Además, se deben cumplir unas especificaciones de capacidad energética de dichos
acumuladores que determinarán la autonomía del tranvía. Ambos parámetros nos
asignarán los tiempos de recarga en las paradas y tras su análisis en función de los
requerimientos y las posibilidades técnicas se adoptará una solución concreta basada,
bien en la utilización del volante como única fuente de energía en los tramos sin
catenaria, o un sistema mixto de baterías–volante en caso de que lo anterior fuera
inviable técnica o económicamente. También se estudiará la viabilidad de
funcionamiento del tranvía prescindiendo total o parcialmente de catenaria, ya sea en
el caso de sistema basado en volante exclusivamente o en sistema mixto volantebaterías. Por tanto, se adopta un enfoque flexible en cuanto a diseño y posibles líneas
de desarrollo.
1.3.3 Dimensionamiento del volante
En cuanto al acumulador de energía cabe destacar dos partes fundamentales. Por un
lado el diseño del volante en sí, comprendiendo el diseño conceptual, la elección de
materiales y predimensionamiento mecánico. No se pretende hacer un diseño
detallado del volante, ya que supondría por si solo un proyecto completo. Debe tenerse
en cuenta que el volante de inercia para acumulador embarcado debe tener unas
1 Introducción
31
características diametralmente opuestas al que se dispone actualmente para uso en
tierra (apoyo de subestaciones, etc.), ya que su peso es un factor determinante en el
diseño por lo que se buscará una solución que combine ligereza (materiales
compuestos), pérdidas mínimas (se pretende una sustentación magnética del volante
mediante cojinetes magnéticos, con lo que se nos presenta el problema asociado a las
pérdidas por corrientes parásitas en la zona de enlace magnético) y gran capacidad de
almacenamiento (posibilidad de sistema mixto volante-baterías).
1.3.4
Máquina eléctrica
Se debe elegir el tipo de tecnología para la máquina eléctrica acoplada al volante de
inercia. Esta máquina será la encargada de acelerar el disco en las fases de carga
actuando como motor y alimentándose bien de la red (paradas) o de la propia
generación del motor principal del tranvía cuando actúa como generador en las fases
de frenado regenerativo. En principio se barajan varias posibilidades. La primera es
acoplar un motor de reluctancia conmutada, en cuyo caso se partiría de un diseño
conceptual que habría que adaptar o rediseñar sin entrar en un estudio técnico
detallado. Por otro lado se estudiaría la posibilidad de acoplar una máquina síncrona,
posiblemente de imanes permanentes, con control vectorial de velocidad o incluso una
máquina de inducción.
1.3.5
Cojinetes magnéticos y pérdidas
Uno de los atributos fundamentales del sistema de acumulación es que tenga unas
pérdidas mínimas para asegurar una eficiencia razonable. Se estudiarán las posibles
soluciones a este problema adoptándose la más conveniente. Probablemente se
encapsule el sistema en una carcasa en la que se realizará el vacío. Otra línea de
desarrollo fundamental en el proyecto y a la que se dedicará gran parte del trabajo es el
estudio y diseño de cojinetes magnéticos. Se estudiarán en detalle hasta obtener una
buena solución siempre que sea factible (estudio de pérdidas por corrientes parásitas) y
se realizará el diseño técnico, tanto de los cojinetes en sí como del sistema de control
(diseño conceptual) asociado, que controla las fuerzas magnéticas que estos ejercen
1 Introducción
32
para mantener el volante sustentado en la posición adecuada. Este tipo de cojinetes
sobre los que levitaría el volante de inercia reducirían a cero las pérdidas por fricción
en los ejes, pero presentan importantes complejidades técnicas fundamentalmente
debidas a las corrientes parásitas presentes con sus pérdidas asociadas. Por tanto, esta
fase del proyecto es como las anteriores muy flexible, aunque será en la que más nos
centremos a nivel técnico invirtiendo una tercera parte del trabajo, e irá asentándose
conforme se vaya realizando el estudio de los cojinetes y se vean las posibilidades de
diseño que se tienen, con el objetivo principal de obtener una sustentación del volante
que minimice las pérdidas.
1.3.6
Carcasa y acoplamiento Cardán
Se realizará un prediseño conceptual de la carcasa que contiene el conjunto, según
los requerimientos necesarios para conseguir el objetivo perseguido de contener el
conjunto y a su vez obtener la atmósfera de vacío deseada en su interior, teniendo en
cuenta las restricciones presentes de peso, presurización, seguridad etc. Debido a la
presencia de masas rodantes a gran velocidad, la carcasa se acoplará en el tranvía
mediante un sistema Cardán compuesto por dos marcos concéntricos que permitan
libremente el giro relativo del conjunto con respecto al tranvía en los ejes x e y, con
objeto de mantener siempre vertical el eje del volante y evitar así los enormes esfuerzos
a los que estarían sometidos los cojinetes magnéticos por efecto de los pares
giroscópicos y que crearían graves problemas de estabilidad en los mismos.
1.3.7
Sistema de control
Adicionalmente, y en función del tiempo disponible, se diseñará de forma
conceptual el sistema de control que gobierna el acumulador, siendo la parte
fundamental el control de la máquina eléctrica, ya que el control de los cojinetes
magnéticos se propone como un sistema independiente asociado exclusivamente al
control de posicionamiento de estos respecto al disco.
Debido a la gran complejidad y extensión del proyecto, no se diseñarán
detalladamente todos los componentes, pues esto supondría unas cargas de trabajo que
1 Introducción
33
superarían con mucho el tiempo y dedicación disponible para la realización de un
proyecto fin de carrera. Lo que se pretende es desarrollar un modelo general a un nivel
conceptual y funcional y centrarse a nivel de diseño técnico en ciertos componentes
como los cojinetes magnéticos o el volante de inercia, sin pretender llegar a planos de
fabricación detallados.
1.4 Herramientas empleadas
En primer lugar se ampliarán y reforzarán los conocimientos adquiridos a lo largo
de la carrera en disciplinas tan presentes e importantes en el desarrollo de este
proyecto como son Campos Electromagnéticos, Mecánica y Resistencia de Materiales,
Tecnología de Materiales, Máquinas eléctricas, Accionamientos Eléctricos y Control
fundamentalmente.
Los recursos y herramientas que emplearemos pertenecen al ámbito de la
simulación y la ingeniería asistida por ordenador, siendo el método de los elementos
finitos el potente método numérico que respalde los cálculos.
Asimismo se precisará un periodo de formación en el que aprender el manejo
de los programas de diseño y simulación con los que se va a trabajar, que serán CATIA
V5R17 y ANSYS 11.0. En cuanto al diseño conceptual de los componentes a diseñar se
trabajará con CATIA. Los cálculos analíticos se desarrollarán a través del programa de
cálculo simbólico MATHEMATICA 7.0.
El desarrollo, estudio y simulación de los cojinetes magnéticos se desarrollará
con el software de simulación ANSYS basado en la aplicación computerizada del
método de los elementos finitos, realizándose todos los cálculos Electromagnéticos
(Corrientes parásitas, campos, fuerzas magnéticas, etc.) con apoyo de dicho motor de
cálculo. Asimismo, trabajaremos con ANSYS para el dimensionamiento y estudio
mecánico del volante de inercia y la máquina eléctrica.
1 Introducción
34
1.5 Especificaciones técnicas y predimensionamiento del sistema
1.5.1 Introducción
La primera fase del proceso de diseño del sistema de almacenamiento de energía es
la extracción de los parámetros de funcionamiento requeridos para el sistema a partir
de las simulaciones de consumo de potencia y energía de un tranvía en un trayecto
urbano proporcionadas por el cliente. Estas simulaciones arrojan que una energía
disponible de 15 MJ es suficiente para satisfacer los requerimientos de autonomía de
cualquier tranvía. Por el contrario las potencias disponibles deben estar en el rango de
al menos 500 kW, para garantizar la carga del sistema en un tiempo conveniente.
Este apartado contiene el predimensionamiento de un volante de inercia para
satisfacer las necesidades del párrafo anterior. Para los requerimientos geométricos, se
empleará la especificación proporcionada por el cliente que indica el espacio
disponible sobre el techo de los tranvías para instalar el dispositivo..
Dada la fase preliminar de este estudio, no se intentará todavía satisfacer de forma
estricta todos los requerimientos, si no tan solo analizar la viabilidad del sistema y
localizar los puntos complejos del problema.
1.5.2
Especificaciones generales
1.5.2.1 Especificaciones de potencia y energía
El cliente ha suministrado un conjunto de simulaciones de diferentes tranvías,
metros y trenes de cercanías incluyendo en ellas la posibilidad de introducir un sistema
de almacenamiento de energía al mismo tiempo que se analizan los ahorros energéticos
que la introducción de este sistema proporciona a la operación del vehículo.
En la Figura 1.2, se puede observar un ejemplo de los esquemas de energía y
potencia propuestos por el cliente.
En este caso, la energía almacenada total es
ligeramente superior a 4 kW.h (exactamente 15.3 MJ), aunque tan solo se aprovechan
1 Introducción
35
unos 14.4 kW.h, ya que es necesario dejar una cierta cantidad de energía almacenada
en la máquina para evitar que el tiempo de recarga aumente enormemente.
1000
4
800
3
600
2
400
1
200
0
0
-1
-200
-2
-400
-3
-600
-4
-800
-5
0.00
Power (kW)
Energy (kWh)
ESM Energy - Power
5
-1000
100.00
200.00
300.00
400.00
500.00
600.00
700.00
Time (sec.)
ESM energy level (kWh)
P_ESM (kW)
Figura 1.2: Ejemplo de simulación para obtener las especificaciones de potencia y energía del sistema (operación sin
catenaria).
Respecto a los requerimientos de potencia del ejemplo anterior, podemos ver que se
alcanzan picos de potencia al sistema almacenador de unos 900 kW, esta especificación
no es del todo correcta, ya que se supone que la carga del dispositivo se realiza a
potencia constante, sin embargo en una máquina eléctrica, la potencia tiende a crecer
con la velocidad de giro, dado que el par se mantiene constante y la potencia mecánica
es el producto par por velocidad. Por tanto, la potencia de pico deberá ser mayor que
el valor medio de la Figura 1.2, ya que se debe compensar el hecho de que la potencia a
velocidades bajas será notablemente menor que la propuesta. Por otra parte, el dato
verdaderamente significativo es el tiempo de recarga del sistema, que corresponde con
el tiempo mínimo que el tranvía debe permanecer en la estación aunque no esté
habiendo subida o bajada de pasajeros. De la figura anterior, podemos establecer este
valor como el cociente del incremento de energía entre la potencia (supuesta constante)
de carga:
1 Introducción
36
∆ á í
15.3 0.25
15.8 900 Esta especificación es la que debe cumplirse para mantener la funcionalidad del
sistema, desgraciadamente implicará que la potencia que debe suministrar la máquina
eléctrica y la electrónica de potencia tiene que tener un pico de potencia notablemente
más alto que el valor medio propuesto.
En resumen, para la especificación inicial, el sistema tiene que tener 14.4 MJ de
energía disponible y poder recargarse en unos 16 s. Esto implica que la capacidad total
de almacenamiento del volante debe ser aproximadamente de 20MJ ya que se ha fijado
la velocidad mínima de operación en wmin=wmax/2 , ( s=wmin/wmax=0.5).
Recordemos que la energía útil del volante operando entre wmin y wmax se puede
obtener a partir de la siguiente relación:
E = E max (1 − s 2 )
Con lo que la energía disponible es un 75% de la total almacenada por el volante.
1.5.2.2 Especificaciones geométricas y mecánicas
Para las aplicaciones de tranvías, el cliente suministró una especificación que
permitiría instalar el sistema de almacenamiento en un diseño de coche ya existente.
Estos requisitos son muy exigentes, debido a que el sistema de almacenamiento
debería ir montado en el techo de los coches. Los valores especificados son los dados
por la Tabla 1.4.
Estos valores geométricos corresponden a la envolvente total del sistema,
incluyendo el blindaje y la cámara de vacío si fueran necesarias.
Las limitaciones geométricas propuestas insinúan claramente el uso de dos volantes
de inercia colocados como puede verse en la Figura 1.3. Se ha reservado así mismo un
gran espacio para el blindaje del sistema, ya que debe preverse desde el principio la
posibilidad del un fallo catastrófico debido a causas internas o externas. Por motivos
de peso, muy probablemente, este blindaje deba fabricarse en fibra de vidrio, que
1 Introducción
37
además presenta una excelente resistencia a impacto. La contrapartida de esta
configuración es el encarecimiento del sistema debido a la necesidad de duplicar todos
los componentes.
Figura 1.3: Posible configuración del sistema empleando dos volantes de inercia.
La figura anterior corresponde a una sección a la altura de los volantes de inercia, las máquinas eléctricas
responsables de accionarlos se colocarían inmediatamente encima con el rotor acoplado a un eje solidario al volante de
inercia. Otra opción sería instalar las máquinas en el interior de los ejes de los volantes. En este caso, los ejes serían
tubos huecos con un radio interno suficiente para poder instalar el estator de las máquinas.
Altura
Longitud
Anchura
Peso
500 mm
1500 mm
1000 mm
400 kg
Tabla 1.4: Especificaciones geométricas y de masa para el sistema completo
Respecto a la electrónica de potencia necesaria para el accionamiento de las
máquinas, la idea inicial sería distribuirla en los huecos disponibles entre la carcasa y
los volantes, o alternativamente, ceñir los volantes a la carcasa y posicionarla en el
espacio disponible en entre el exterior de la carcasa y la envolvente del sistema de 1000
mm x 1500 mm.
1 Introducción
38
1.5.2.3 Especificaciones adicionales
1.5.2.3.1
Refrigeración
La refrigeración del módulo de almacenamiento, deberá emplear de forma
preferente convección natural sin ventiladores. No existe suministro de agua de
refrigeración.
En cualquier caso el módulo debe ser independiente respecto a la
refrigeración.
1.5.2.3.2
Ruido acústico
El sistema de almacenamiento debe satisfacer las normas ISO3095 e ISO3381.
1.5.2.3.3
Vida del sistema
La vida del tranvía es de 30 años, pero se propone que el sistema de
almacenamiento se pueda cambiar al cabo de 10 años.
Respecto al cálculo a fatiga de los materiales, un cálculo preliminar arroja que
durante la vida de 10 años, el número de ciclos puede ascender a 700.000.
1.5.2.3.4
Entorno de operación
El sistema de almacenamiento debe operar en el rango de temperaturas de -25ºC a
45ºC.
La altura sobre el nivel del mar de operación puede oscilar entre 0 y 1000 m.
Por su instalación directa en el techo del vagón, el sistema está expuesto a acción
directa del sol, lluvia, atmósfera salina, etc.
El contenedor del sistema de almacenamiento debe tener un nivel de protección de
al menos IP65 de acuerdo con la norma CEI60529, los conectores deben tener un nivel
de protección de IP67 respecto a la mencionada norma.
1 Introducción
39
1.5.2.4 Otras condiciones
El equipo no debe contener substancias peligrosas como cadmio, metales pesados,
CFCs, HCFCs o cualquier otro material que pueda dañar a las personas o el medio
ambiente.
1.5.3 Funcionamiento general del sistema
A continuación se muestra de manera conceptual mediante bloques funcionales la
relación entre los diferentes componentes del sistema de almacenamiento de energía y
su interacción con la máquina motriz principal del vehículo. Los parámetros del
convertidor de potencia están en función de las características de la red de tracción en
que opere el tranvía y del tipo de máquina eléctrica que utilice.
RED TRACCIÓN
AC O DC
ACELERA VOLANTE
Carga
Paradas (20s)
15MJ/450KW
DECELERA VOLANTE
Volante
Inercia
Máquina
Eléctrica
Convertidor
AC/DC/AC
AC/DC
Máquina Motriz
Principal (Motor/
Generador)
W
Monitorización
Estado de carga
FLUJO POTENCIA TRACCIÓN
FLUJO POTENCIA FRENADO
E=1/2 J w^2
Figura 1.4: Esquema de funcionamiento general del sistema.
1 Introducción
1.5.4
40
Predimensionamiento del sistema
1.5.4.1 Introducción
En este apartado se pretende realizar un predimensionamiento grosero del/los
volantes con objeto de tener una primera aproximación al diseño. Se parte de las
especificaciones expuestas en el apartado precedente para diseñar dos posibles
modelos de sistema.
Se baraja la posibilidad de trabajar con dos volantes, dadas las ventajas de
acoplamiento que tiene esta configuración para el espacio disponible en el techo de los
trenes. Sin embargo, esta opción implica la duplicación de todos los sistemas auxiliares,
lo que encarece bastante el prototipo.
Otra posibilidad es trabajar con un único volante. Dentro de estas dos opciones se
plantea el problema de la elección de materiales. Con objeto de obtener una estimación
de la factibilidad de cada modelo de sistema, se propone un predimensionamiento
tanto de un volante lento en acero de alta resistencia, como de uno o dos volantes en
composite de fibra de carbono. A partir de los resultados que se obtengan en este
pequeño estudio, se podrá tomar la decisión del tipo de sistema a diseñar, basado en
un único volante o en un par de ellos según convenga. Asimismo, se escogerá el
material más adecuado.
1.5.4.2 Predimensionamiento de los volantes
La energía que puede almacenar un volante de inercia de momento de inercia I,
girando a una velocidad angular ω es de:
1
2
Desgraciadamente no toda esa energía está disponible en una aplicación práctica.
En efecto, dado que la potencia que puede generar la máquina eléctrica depende de la
velocidad de giro (ya que el par máximo de la máquina está limitado), es necesario que
durante la operación la velocidad no descienda de un cierto valor mínimo.
Denominamos s al cociente entre la velocidad máxima (limitada por motivos
1 Introducción
41
mecánicos) y la mínima (limitada por la disminución de la potencia disponible en la
máquina eléctrica). En ese caso la potencia disponible será obviamente:
1 !1 "
á
2
Un valor elevado de s permite operar la máquina siempre con una potencia eléctrica
alta, pero impide acceder a gran parte de la energía almacenada. Por otra parte, un
valor pequeño de s nos obliga a comenzar la carga con una potencia eléctrica muy baja,
alargando los tiempos de carga u obligando a sobredimensionar la máquina eléctrica.
Como valor de compromiso, podemos adoptar inicialmente un valor de 0.5, que
permite disponer del 75% de la energía sin reducir nunca la potencia disponible del
50% de la máxima.
En ese caso, para poder tener una energía disponible de 14,4 MJ
entre los dos volantes, será necesario almacenar una energía total de 9,6 MJ en cada
uno de los dos volantes.
Si reemplazamos en la expresión de la energía el valor del momento de inercia polar
de un cilindro de diámetro D, longitud l y densidad ρ, obtenemos la expresión:
#
&' ( )
64
Por otra parte, el esfuerzo mecánico máximo σ en el cilindro, se da en el origen, y su
valor es:
*
3+, ( ' ) !1"
32
Donde n es el módulo de Poisson del material. Combinando la ecuación de la
energía con la del esfuerzo mecánico, llegamos a una expresión muy interesante que
nos vincula la energía almacenada con el esfuerzo aceptable en el material y el
volumen del disco:
-./
*0 (2)
Esta ecuación es muy interesante, porque nos dice que para almacenar una
determinada cantidad de energía en un material dado, es necesario un cierto volumen
del material, pero variar el diámetro o la altura del cilindro, no cambia el volumen
1 Introducción
42
necesario. Dicho de otra forma, se puede usar un cilindro delgado y largo girando a
alta velocidad o uno plano y de gran diámetro girando a baja velocidad.
Asimismo, la última expresión nos permite decir que dos materiales de la misma
resistencia mecánica, requieren el mismo volumen de material para almacenar una
energía dada independientemente de su densidad. Obviamente, el material menos
denso deberá girar a mayor velocidad (si la geometría es la misma). Precisamente,
basándonos en esta elección de material más o menos denso, podemos realizar un
primer estudio de dos diseños, uno basado en material de alta densidad, acero de alta
resistencia, y otro en material de baja densidad, un composite de fibra de carbono.
Por otra parte, una vez calculado el volumen y dado que el diámetro viene dado por
requisitos geométricos, podemos obtener la altura necesaria del volante.
&
(1
234
(3)
La velocidad máxima viene dada por la necesidad de almacenar la energía máxima:
(
5
3
6
7
(4)
Ahora dividiremos el estudio dos casos, según se emplee acero o fibra de carbono
1.5.4.3 Predimensionamiento de un volante en acero de alta resistencia
Ahora podemos proceder al primer paso del dimensionamiento.
En caso de
emplear acero de alta resistencia, un valor típico del límite de fluencia es de 900 MPa,
debido al requerimiento de 7107 ciclos de vida, el material debe operar en la asíntota
horizontal de la curva S-N, que para la mayor parte de los aceros es aproximadamente
la mitad del límite de fluencia. Tomaremos por tanto el valor de 450 MPa de pico para
el diseño del volante. Aplicando la ecuación (2) obtenemos que el volumen de acero a
emplear es del orden de 0,0352 m3, lo cual implica, para una densidad del acero de
7850 kg/m3, que la masa del volante es de 276 kg. Es claro por este resultado que para
disponer de la energía total requerida, la masa de ambos volantes sería de 552 kg, ya de
por si superior al máximo permitido de 400 kg.
Por tanto en caso de que el
1 Introducción
43
requerimiento de masa sea imprescindible un volante de acero es inaceptable. Sin
embargo, profundizaremos algo más en esta solución porque puede ser deseable en
otros casos, tales como cuando se coloca el volante en la parte inferior de un metro o
tren de cercanías y el peso no es un problema tan acuciante.
Empleando las ecuaciones (3) y (4), obtenemos que la altura del volante debe ser de
125 mm y la velocidad de giro de 11800 rpm
Aunque hemos visto que desde el punto de vista de peso es imposible cumplir las
especificaciones con un volante de acero de alta resistencia, el uso de acero también
presenta sus ventajas:
Facilidad de encontrar subcontratistas para la fabricación de los volantes.
La baja velocidad de operación permite el empleo de rodamientos
convencionales en vez de magnéticos.
A su vez, el empleo de rodamientos convencionales permite reaccionar las
cargas giroscópicas entre los dos volantes, de forma que el par giroscópico
transferido al vehículo es nulo.
Así mismo se hace innecesaria una
suspensión de tipo cardán.
Se trata de un material muy conocido y que permite operar con márgenes de
seguridad relativamente bajos (de acuerdo a normas).
El problema de acoplar los rodamientos y la máquina eléctrica al eje se
resuelve de forma relativamente simple si el eje se forja en una sola pieza con
el volante.
En vista de estas ventajas, se ha trabajado en el diseño de algunos volantes en
hierro, que puedan satisfacer los requerimientos del proyecto, excepto en lo referente a
la masa total.
1 Introducción
44
Figura 1.5: Volante de núcleo parabólico. Esfuerzo de Von Mises [Pa]
Así, en la Figura 1.5, se muestra uno de los posibles diseños para el acumulador. El
volante en cuestión tiene un núcleo parabólico equirresistente y una pequeña llanta en
el exterior para aumentar la inercia. Se ha limitado el esfuerzo de pico a 450 MPa por
los motivos que se citaron previamente (fatiga). Cada volante almacena unos 1,8 kW.h
y pesa alrededor de 165 kg. Es un diseño de alta velocidad para emplearse el acero
como material.
Por el contrario, en la Figura 1.6 se muestra un volante más convencional con llanta
y cubo, diseñado también para no exceder en su núcleo un esfuerzo de 450 MPa (si
bien existen concentraciones locales en la zona de unión llanta-cubo). Así mismo la
velocidad de operación es inferior respecto a los otros tipos de volante.
1 Introducción
45
Figura 1.6: Volante convencional con llanta y cubo
1.5.4.4 Predimensionamiento de un volante en fibra de carbono
La gran ventaja de los volantes en composite de fibra de carbono es que pueden
operar a un valor de esfuerzo semejante a los aceros, pero su densidad es de tan solo de
unos 1500 kg/m3. Eso quiere decir que la capacidad de almacenar energía por unidad
de masa es unas 5 veces mayor que el del acero.
Desde el punto de vista del predimensionamiento, los volantes en composite de
fibra de carbono, no pueden tener la forma de un disco completo, ya que es necesario
introducir un eje en el que se acoplen los cojinetes y la máquina eléctrica. Por ello el
volante en si debe tener un eje hueco en el que se haga este acoplo. El hecho de que el
volante sea hueco, afecta profundamente a la naturaleza de los esfuerzos, que se ven
amplificados respecto a un eje macizo.
Para un diámetro externo Do y un diámetro interno Di, el esfuerzo acimutal máximo
en el volante es:
1 Introducción
46
*
3+,
1,
) 8'9 + '
:
16
3+,
Es interesante observar el valor de 16 en el denominador y compararlo con el 32 de
la ecuación (1), el simple hecho de añadir un agujero central aumenta en un factor 2 los
esfuerzos por muy pequeño que sea el orificio.
Mientras que la energía almacenada es:
#
&) ;'9( '( <
64
Y la masa será:
=
#&;'9 ' <
4
Por otra parte, el esfuerzo radial máximo aumenta en función del cociente Do/Di
debido a la anisotropía del material, es interesante que el esfuerzo radial sea mucho
menor que el acimutal, por lo que el espesor de la capa de composite debe ser lo más
reducido posible.
Usando las ecuaciones anteriores, podemos dimensionar ya un volante que nos
permita cumplir las especificaciones de energía y masa. Dado que aun no se dispone
de los valores definitivos del material, este cálculo puede estar sujeto a variación.
Se ha estudiado así mismo la posibilidad de usar uno o dos volantes, esto es así
debido a que los costes de los sistemas auxiliares (como los cojinetes magnéticos) para
los volantes de inercia en composite de fibra de carbono son superiores, por lo que
puede ser interesante agrupar toda la inercia en un solo volante.
Parámetro
Un solo volante
Dos volantes
Densidad del material
Esfuerzo de trabajo
Velocidad angular
Diámetro exterior
Diámetro interior
Altura
Energía por volante
Masa por volante
1500 kg/m3
500 MPa
14400 RPM
800 mm
600 mm
427 mm
20 MJ
140,8 kg
1500 kg/m3
500 MPa
19450 RPM
600 mm
400 mm
315 mm
10 MJ
74 kg
Tabla 1.5: Parámetros de diseño para la opción de un único volante y para la de un par.
1 Introducción
47
En ambos casos, el conjunto de volantes pesará entorno a los 150 kg (excluyendo el
eje). Eso permitiría conseguir que todo el sistema no supere el presupuesto de peso de
400 kg.
Por lo tanto, para la aplicación sobre tranvías, se escoge el diseño en fibra de
carbono, ya que las limitaciones de peso impiden la utilización de acero, aunque podría
ser interesante en otras aplicaciones de tracción. Además, se ha decidido plantear el
sistema con un solo volante, pues la eliminación de los pares giroscópicos no
representa en principio un grave problema si se dispone de un sistema de sustentación
que confiera cierta libertad angular al sistema. Por otra parte, la complejidad de los
sistemas auxiliares asociados al uso del composite (cojinetes magnéticos) encarecería
bastante el prototipo en caso de emplear la configuración de dos volantes.
2
Diseño del rotor
2 Diseño del rotor
49
2 Diseño del rotor
2.1 Introducción
En este capítulo se desarrolla el diseño integral del rotor del dispositivo. Se parte del
diseño conceptual mostrado en la Figura 2.1 y a partir de él se estudia tanto analítica
como numéricamente la naturaleza de las tensiones que se generan en su
funcionamiento normal. El objetivo es conseguir un diseño fiable en cuanto a la
resistencia de los materiales empleados, para una vida estimada de 10 años o 700.000
ciclos de carga y descarga. Además, se optimizará el diseño de forma que se llegue a
un
Volante en FC
compromiso
razonable
entre
las
dimensiones-masa
del
rotor
de
y
el
nivel
esfuerzo de trabajo de
Sistema de
acoplamiento de
las armaduras
magnéticas del
sistema de guiado
los materiales que lo
Imanes
NdFeB
integran.
La
optimización
se
desarrolla
mediante
estudios paramétricos de
la geometría del modelo.
Se realiza un primer
Eje del rotor
Al- 7475
Figura 2.1: Diseño conceptual del rotor del ECOTRANS. Modelo axisimétrico.
estudio
ayuda
analítico
del
Wolfram
6.0
para
con
programa
Mathematica
tener
una
primera toma de contacto con el problema. A partir de los resultados obtenidos
analíticamente se obtiene la geometría de partida para la optimización y el
dimensionamiento con elementos finitos, que se lleva a cabo con el software de ANSYS
Multiphisics.
Debido a las restricciones de espacio para instalar la carcasa de la máquina y a los
requerimientos de capacidad de almacenamiento de energía y tiempo de recarga
2 Diseño del rotor
50
impuestos por el cliente, se parte de un diseño en el que algunas dimensiones están
fijadas. El resto de las dimensiones serán los parámetros a optimizar.
Los componentes principales del rotor se muestran en la Figura 2.1, en la que se
ha representado una sección vertical que pasa por el eje de rotación. La arquitectura del
rotor consiste en un eje cilíndrico de aluminio aleado en el que se ha zunchado en su
parte externa un volante cilíndrico de fibra de carbono que supone la mayor parte de la
masa en rotación. Además, se han incorporado en el radio interno del eje sendos anillos
de fibra de vidrio con el objetivo de disponer de un soporte mecánico sobre el que
acoplar las armaduras móviles de los cojinetes magnéticos radiales y axiales. En la zona
intermedia del eje se han fijado una serie de imanes permanentes que generan el
campo del rotor de la máquina eléctrica.
Se ha escogido este diseño tras realizar varios estudios menos satisfactorios sobre
otras geometrías
2.2 Esfuerzos mecánicos
2.2.1 Introducción
Los esfuerzos que sufre el rotor de la máquina están originados por múltiples
factores que se pueden agrupar según su origen en dos, dinámicos y residuales. Los
primeros se producen fundamentalmente debido a la dinámica de rotación del volante
por la presencia de las enormes fuerzas centrífugas existentes. Sin embargo, también se
producen esfuerzos tangenciales provocados por la aceleración angular, y tensiones
adicionales debidas al efecto giroscópico, al propio peso, a las vibraciones o a los
posibles desequilibrios rotacionales de la masa giratoria.
Por otro lado, las tensiones residuales están generadas por el propio material y por
tanto permanecen en ausencia de velocidad. Su origen puede ser térmico o de curado,
o debido a la hidratación de las fibras del composite. Sin embargo, el estudio se puede
simplificar en gran medida si se asume que la contribución fundamental al estado
2 Diseño del rotor
51
tensional del rotor se debe principalmente a la fuerza centrífuga, que es la causa de
fallo más común. La distribución de estas tensiones es radial y acimutal, siendo esta
última la de mayor magnitud, razón por la cual la fibra del composite se orienta
circunferencialmente. El esfuerzo radial, a pesar de ser un orden de magnitud menor
que el acimutal, es muy problemático cuando se trabaja con materiales compuestos
unidireccionales,
pues
presentan
bajas resistencias a la rotura en la
dirección normal a la fibra. Su valor
es función del espesor de pared,
haciéndose
aumentar
cortantes
más
éste.
τθr
importante
Los
pueden
al
esfuerzos
aparecer
debidos a la aceleración angular y
son
Figura 2.2: Desplazamiento radial de la pared del volante debida
a la fuerza centrífuga
función
También
se
directa
crean
de
ella.
esfuerzos
cortantes τrz debidos a la variación
de σz. Los cortantes τzθ son nulos debido a la simetría circular del volante. En cualquier
caso, salvo el cortante debido a la aceleración, que será muy pequeño, su valor es tan
pequeño que se pueden despreciar. Por su parte, el esfuerzo normal σz solo aparece en
rotores muy largos y se origina por efecto Poisson. Su valor, así como el de los
desplazamientos axiales será poco importante y está desacoplado de las tensiones
radial y acimutal. Por eso, la mayoría de los autores consideran el estado tensional del
rotor en movimiento como un estado plano de tensiones en planos normales al eje de
giro
Según(Genta, 1985), otro de los problemas importantes cuando se trabaja con
materiales compuestos es la unión eje-llanta debido al desplazamiento radial que
experimenta el volante al incrementar su velocidad de rotación (Figura 2.2). Para
enfocar esta problemática, muchos autores han propuesto emplear uniones elásticas
que disminuyan la rigidez radial y permitan el desplazamiento de forma que la fuerza
centrífuga solo cree tensión acimutal. Otra línea de estudio seguida por (Genta, 1985) y
(Gabrys C.W, 1994) es la de rotores multicapa diseñados con anillos concéntricos de
materiales de distinta elasticidad. Se proponen uniones con el eje de elastómero y capas
consecutivas de materiales de rigidez creciente
hacia el exterior. Una posible
combinación de materiales sería fibra de carbono y vidrio con algún material de
2 Diseño del rotor
52
elasticidad intermedia entre ambos, colocando la fibra de carbono en la periferia. Otra
solución
parecida
sería emplear un composite de modulo elástico muy bajo. El
desarrollo del rotor híbrido multicapa, y la distribución de tensiones y deformaciones
que se da en él está descrita de forma resumida en (Kitade, 2000)En la actualidad, se
siguen buscando nuevos diseños que juegan con distintos materiales y su posición
radial como en (Ha, 2001). En (Ha, 2001) se busca maximizar la energía almacenada
manteniendo las tensiones dentro de los límites de resistencia del material. Por último
y siguiendo una línea propia de diseño e investigación, se propone el montaje del
volante mediante un ajuste térmico por interferencia. Se estudiará la distribución de
tensiones de origen térmico que se siguen de dicho ajuste y se estudiará la influencia
tanto de la interferencia como del espesor de la pared del eje para buscar el diseño
óptimo que se ajuste a las restricciones de resistencia, espacio, peso y capacidad de
acumulación de energía del sistema.
2.2.2
Efecto giroscópico
En cuanto a la importancia de otros efectos dinámicos, se debe considerar la
influencia del momento giroscópico originado por la rotación de la masa y que
produce fuerzas que tienden a mantener la posición de su eje de giro. La segunda ley
de Newton aplicada a la dinámica de rotación expresa que:
∑M
G
=
∂LG
∂t
El momento angular de un sólido rotando:
LG = I ⋅ w
Donde todas las magnitudes se calculan en un sistema de referencia centroidal
solidario al cuerpo. Evidentemente, el tensor de inercia tendrá una expresión diferente
según sea la orientación del sistema de referencia en el que se calcula, pero siempre
representará la misma transformación. Además, siempre es posible encontrar un
sistema de ejes respecto de los cuales sean nulos los productos de inercia, es decir,
2 Diseño del rotor
53
siempre se puede obtener un tensor diagonal. Si el cuerpo es axisimétrico, el primer eje
principal de inercia coincidirá con dicho eje de simetría polar. Los otros dos ejes se
encontrarán en el plano ecuatorial del volante orientados en cualquier dirección y
formando un sistema ortogonal con el primero. Con esta disposición de ejes, si el
cuerpo rota con respecto a su eje polar de simetría o primer eje de inercia principal, el
momento angular solo tendrá componente en dicho eje y será colineal con la velocidad
angular. Por lo tanto, el análisis de pares giroscópicos se reduce a derivar con respecto
al tiempo la siguiente expresión escalar:
L1 = I1 ⋅ w1
∑M =
∂L1
∂t
OXYZ
(1)
Donde el número 1 indica que las componentes están dadas en el primer eje de
inercia principal. Pero la derivada expresada en (1) debe realizarse con respecto a un
sistema de referencia inercial 0XYZ y recordemos que el sistema formado por los ejes
de inercia principales es solidario al cuerpo y por lo tanto rotará con él a la velocidad
de espín w1. Por lo tanto, para derivar (1), debemos emplear la expresión de la
derivada temporal de un vector V respecto a un sistema de referencia
O123
en rotación
rotando a Ω
∂V
∂t
=
OXYZ
∂V
∂t
+ Ω ×V
O123
Lo que aplicado a nuestro caso resulta
∑M=I ⋅Ω×w(2)
1
donde
w = w1 ⋅ u1
El resultado obtenido en (2) indica que cualquier variación en la dirección de w es
resultado de la aplicación de un par al volante. Evidentemente, dicha variación solo
será posible si existe una rotación del eje de espín, es decir, si se tiene una Ω distinta de
2 Diseño del rotor
54
0. Como el volante lleva un sistema de guiado basado en cojinetes magnéticos, son
éstos los que deben proporcionar dicho par al variar la orientación del eje de espín.
Pero en virtud de la tercera ley de Newton, si los cojinetes aplican un par al volante,
sufrirán el mismo par pero de sentido contrario, que a su vez se transmitirá al resto del
vehículo.
Respecto a la magnitud de las cargas giroscópicas, se observa en (2) que el par es
proporcional al momento de inercia polar del volante, a la velocidad de espín w, a la de
rotación del eje de espín Ω, y al seno que ambas forman. Debido a la orientación
vertical
del
cualquier
eje
de
inclinación
giro,
del
vehículo con respecto a la
horizontal se traduce en una
velocidad
angular
Ω
ortogonal con la velocidad de
espín, lo que maximiza el
producto
vectorial
entre
ambas. Además, si tenemos
en cuenta que el rotor opera
en torno a las 13500 rpm y
tiene una inercia importante,
Figura 2.3: Diseño conceptual del sistema de acoplamiento propuesto
para la eliminación de pares giroscópicos.
son esperables unos fuertes
pares
giroscópicos,
aun
tratándose de lentos cambios en la orientación del eje de rotación de la máquina. En
principio, este momento giroscópico es perjudicial para el vehículo al que se transmite,
pues le imprime cargas que éste debe compensar para equilibrarse, dificultando así su
maniobrabilidad. Mayor gravedad reviste la estabilidad de los cojinetes, pues estos
pares giroscópicos supondrían una fuerte carga adicional para ellos que no podrían
compensar, y que podría desestabilizar todo el sistema de guiado. Por lo tanto, el
principal problema de este efecto giroscópico es la sobrecarga de los cojinetes, pues las
tensiones que se inducirían en el rotor son del todo despreciables. Este efecto se puede
reducir o incluso eliminar si se dispone de soportes elásticos dotados de la movilidad
angular necesaria. Otra alternativa podría ser suspender todo el sistema mediante un
giroscopio de dos grados de libertad como el que se muestra en la Figura 2.3. Se trata
de un mecanismo formado por dos anillos concéntricos con sus respectivos ejes que
2 Diseño del rotor
55
dispone de dos grados de libertad. La carcasa del dispositivo va abrazada por el anillo
central. El anillo externo dispone de un eje con el que se fija al chasis del vehículo. La
carcasa del dispositivo debe quedar completamente suspendida de forma que no
quede impedido el giro en ninguno de los grados de libertad.
2.2.3 Par motor, peso, desequilibrios de masa y vibraciones
La aceleración angular generada por el par motor produce una fuerza cortante que
suele ser despreciable en el dimensionamiento del rotor. Sin embargo, el diseño del
Ecotrans incorpora una serie de imanes sobre la cara interna del eje del rotor (Figura
2.1) que son los encargados de transmitir el par motor a la masa giratoria del volante.
Por lo tanto , el esfuerzo cortante máximo se debe evaluar en la interfaz imanes-eje con
vistas a la elección del adhesivo o el sistema de fijación apropiado. A partir de los
valores obtenidos en el predimensionamiento del sistema podemos obtener los
siguientes valores orientativos:
Tmax
Par motor máximo
500
Nm
J
Inercia total
20.5
kg m2
αmax
Aceleración angular máxima
25
rad/s2
τmax
Cortante máximo
12.3
kPa
Tabla 2.1: Valores orientativos del cortante máximo para la elección del sistema de fijación de los imanes.
El peso propio genera unas tensiones totalmente irrelevantes, más aún si
empleamos materiales compuestos de baja densidad. La orientación vertical del eje
hace que el peso sea constante a lo largo de cada vuelta.
Los desequilibrios de masas pueden tener un efecto muy importante en un rotor de
alta velocidad, por lo que se cuidará especialmente este aspecto en la fabricación del
conjunto giratorio. Se prestará especial atención en el control de calidad de todas las
piezas del rotor. Los posibles desequilibrios se pueden reducir con sistemas de
compensado y mantener dentro de un margen razonable. El análisis de los modos
2 Diseño del rotor
56
propios de oscilación está motivado por la necesidad de diseñar lejos de las frecuencias
naturales, con objeto de evitar el posible acoplamiento de estos desequilibrios de
masas.
Por último, se deben evitar en la medida de lo posible cualquier tipo de oscilaciones,
pues podrían conducir a un desgaste prematuro por fatiga. En principio serán poco
importantes. Las vibraciones del motor son una fuente potencial de oscilaciones. Para
cuantificar de forma preliminar estos esfuerzos, (Genta, 1985) establece una tabla
comparativa para un diseño de volante clásico formado por llanta y radios (Tabla 2.2).
Se presenta la tensión equivalente atribuida a cada efecto comentado en relación a la
resistencia del material. Estos valores nos dan una idea del peso que tiene cada tipo de
carga en el estado tensional de un volante de inercia, pero son propios de cada diseño y
geometría, por lo que su valor es puramente orientativo.
Carga
σ´/σmax
Inercia
Efecto giroscópico
Peso
Cortante de par motor
1/1.45
1/20
1/150
1/1700
Tabla 2.2: Tensión equivalente para distintos tipos de cargas (Genta, 1985).
Para el estudio analítico solo se considerarán los esfuerzos rotacionales y los del
ajuste térmico del zunchado. Los pares giroscópicos se han eliminado gracias al
sistema de sustentación giroscópico y los demás efectos se consideran despreciables.
2.3 Materiales aplicados
2.3.1 Introducción
Como se demostró en el predimensionamiento del volante, las restricciones de peso
para el sistema completo nos obligan a emplear materiales de baja densidad y alta
2 Diseño del rotor
57
resistencia como los composites de fibra con resinas poliméricas. Con vistas al diseño,
se ha optado por emplear un solo volante de composite en lugar de dos, pues los
sistemas auxiliares como los cojinetes y la máquina eléctrica encarecerían mucho el
prototipo en caso de elegir la segunda opción.
El composite será unidireccional con las fibras orientadas circunferencialmente para
obtener la resistencia a tracción necesaria a los esfuerzos acimutales, que serán los de
mayor magnitud. Sin embargo, los esfuerzos radiales presentes, al actuar sobre la fibra
en su dirección transversal, se deberán evaluar cuidadosamente, pues pueden ser
críticos ya que la resistencia del composite en esta dirección es notablemente menor
que a lo largo de las fibras, siendo especialmente delicado el caso de que la resina deba
trabajar a tracción. Se empleará fibra de carbono con matriz Epoxi para el volante. Se
modelará como material isótropo en el estudio analítico, dejándose el modelado como
material transversalmente isótropo para el estudio con EF. Asimismo, se presentará un
pequeño desarrollo en el que se calcula el valor de las constantes elásticas para el
modelado con EF.
La gran ventaja que nos reporta el empleo de composites es el elevado ratio σmax/ρ,
que aumenta la capacidad de almacenamiento de energía del material. La
contrapartida es la imposibilidad de poder diseñar el volante con forma de disco
completo, pues es necesario introducir un eje en el que se acoplen los cojinetes y la
máquina eléctrica. Como vimos en el predimensionamiento, este hecho afecta
profundamente a la distribución de esfuerzos, que se ve amplificada en un factor 2 con
respecto al diseño macizo, a pesar de lo cual sigue siendo ventajoso su empleo. Para el
diseño del eje se debe emplear un material de gran resistencia y baja densidad, pues
estará sometido a la inercia provocada por la rotación y al empuje de los imanes que
llevará adosados en su superficie interna. Además, se debe considerar su resistencia a
fatiga, pues las tensiones fluctuaran continuamente debido a la carga y descarga del
volante. A partir de una vida estimada de 10 años para el sistema, se ha considerado
que estará sometido aproximadamente a 700.000 ciclos de carga y descarga. El material
propuesto para el diseño del eje es una aleación de aluminio estructural de la serie 2xxx
o 7xxx, concretamente se han propuesto las aleaciones 2024-T3 de la serie 2xxx cuyo
aleante principal es el Cu, y las aleaciones 7075-T73, 7175-T74, 7145-T736, 7475-T651 y
7475-T7351 de la serie 7xxx que emplean Zn. Son aleaciones de alta calidad empleadas
comúnmente en aplicaciones estructurales en la industria aeroespacial, dada su
2 Diseño del rotor
58
elevada resistencia mecánica unida a su baja densidad, y a su buen comportamiento a
fatiga. Su amplia utilización en aplicaciones críticas ha motivado numerosos estudios
de resistencia a la corrosión y a la fatiga, con lo que existen bastantes fuentes de datos
fiables. Se incluye un estudio preliminar de la resistencia a fatiga, que se deberá
profundizar y concretar una vez escogido el material definitivo con datos y ensayos
proporcionados por el fabricante.
Para el diseño de los sistemas de fijación de las armaduras de los cojinetes se
empleará fibra de vidrio y acero magnético macizo y laminado. Dichas armaduras irán
solidariamente unidas al rotor y se modelarán solamente en el análisis con EF.
2.3.2
Material para el eje del rotor
2.3.2.1 Aleaciones de aluminio
En la Tabla 2.4 y la Tabla 2.5 se exponen las propiedades físicas y mecánicas de las
aleaciones propuestas. Todas ellas son aleaciones comerciales de aluminio. Los datos
son orientativos y pueden variar ligeramente con respecto a los productos comerciales.
La mayor parte de los datos se han obtenido de (MatWeb), de la (Aluminum
Association) y de (Boyer, 1986). En la Tabla 2.3 se muestran algunas direcciones web de
interés.
www.globalmetalsales.com
www.metalsuppliersonline.com
www.onlinemetals.com
www.metalmensales.com
www.protcast.com
Tabla 2.3: Proveedores de aleaciones de aluminio de alta resistencia
Aleación
2024-T3
7075-T7351
7475T651
Composición química
Al
Cr
Cu
90.7-94.7
<=0.10
3.80-4.90
87.1-91.4
0.18-0.28
1.2-2
88.5-91.5
0.18-0.25
1.2-1.9
%
%
%
2 Diseño del rotor
59
2024-T3
Aleación
7075-T7351
7475T651
Composición química
Fe
Mg
Mn
Si
Ti
Zn
<=0.50
1.20-1.80
0.3-0.9
<=0.5
<=0.15
<=0.25
<=0.5
2.1-2.9
<=0.3
<=0.4
<=0.2
5.1-6.1
<=0.12
1.9-2.6
<=0.06
<=0.1
<=0.06
5.2-6.2
%
%
%
%
%
%
[GPa]
[MPa]
[MPa]
%
26.9
300
0.33
71.7
510
586
13
241
N=
107ciclos
27
350
0.33
70
70
%
2810
2810
23.2
Tª[20.0 –
100]
25.2
Tª[20.0 –
300]
0.88
138
0.000499
[kg/m3]
Propiedades mecánicas
Modulo de elasticidad
Resistencia a la fluencia
Resistencia a la ruptura
Elongación en la rotura
E
Sy
Su
∆L
Resistencia a la fatiga
(amplitud de esfuerzo alterno)
Sf
Modulo de elasticidad transversal
Resistencia a la ruptura transversal
Ratio de Poisson
Mecanizabilidad
escala 0-100 de aleaciones de Al
G
SGu
ν
73.1
345
483
18
138
N=5
108ciclos
28
283
0.33
72
435
505
13
150
N=5 108ciclos
70
[MPa]
[GPa]
[MPa]
Propiedades físicas
ρ
Densidad
Coef. dilatación lineal
α
Calor específico
Conductividad térmica
Resistividad eléctrica
C
αt
ρe
2780
23.2
Tª[20.0 100 ]
24.7
Tª[20.0 300 ]
0.875
121
0.000582
23.6
Tª[20.0 – 100]
25.2
Tª[20.0 – 300]
0.96
155
0.000430
[µm/m°C]
[ºC]
[J/g-°C]
[W/m-K]
[Ωm]
Tabla 2.4: Propiedades de las aleaciones de aluminio (I)
Aleación
7475-T7351
7175-T74
7175-T736
Composición química
Al
Cr
Cu
Fe
Mg
Mn
Si
Ti
Zn
88.5-91.5
0.18-0.25
1.2-1.9
<=0.12
1.9-2.6
<=0.06
<=0.1
<=0.06
5.2-6.2
88.0-91.4
0.18-0.28
1.2-2
<=0.2
2.1-2.9
<=0.1
<=0.15
<=0.1
5.1-6.1
88.0-91.4
0.18-0.28
1.2-2
<=0.2
2.1-2.9
<=0.1
<=0.15
<=0.1
5.1-6.1
%
%
%
%
%
%
%
%
%
2 Diseño del rotor
60
7475-T7351
Aleación
7175-T74
7175-T736
Propiedades mecánicas
Modulo de elasticidad
Resistencia a la fluencia tracción
Resistencia a la fluencia comp.
Resistencia a la ruptura
Elongación en la rotura
E
Syt
Syc
Su
∆L
71.7
421
380
496
13
71.7
455
524
11
Resistencia a la fatiga
(amplitud de esfuerzo alterno)
Sf
220
N= 107ciclos
-
G
SGu
ν
27
300
0.33
70
Modulo de elasticidad transversal
Resistencia a la ruptura transversal
Ratio de Poisson
Mecanizabilidad
escala 0-100
GPa
MPa
310
0.33
72
485
550
12
160
N=5
108ciclos
27
326
0.33
-
-
%
2800
23.4
Tª[20.0 –
100]
25.2
Tª[20.0 –
300]
0.864
155
0.000430
kg/m3
MPa
%
MPa
GPa
MPa
Propiedades físicas
ρ
2810
2800
Coef. dilatación lineal
α
23.2
Tª[20.0 - 100 ]
25.2
Tª[20.0 - 300 ]
23.4
Tª[20.0 –
100]
Calor específico
Conductividad térmica
Resistividad eléctrica
C
αt
ρe
0.880
163
0.000416
156
0.000432
Densidad
µm/m°C
ºC
J/g-°C
W/m-K
Ωm
Tabla 2.5: Propiedades de las aleaciones de aluminio (II)
Propiedades de las aleaciones de Al propuestas para el diseño del eje del rotor del dispositivo (continuación). Se
observa que la aleación más resistente es la 7475-T651 con una resistencia última de 586 MPa y una fluencia de 510
MPa. También se puede apreciar su buen comportamiento a fatiga cuyo límite se sitúa en 241 MPa para N=107
ciclos.
Cada aleación presenta particularidades en cuanto a su comportamiento ante la
corrosión y la fatiga, existiendo
además diferencias en la dureza y la resistencia
mecánica de cada una. Las aleaciones escogidas pertenecen a las familias 2xxx y 7xxx,
que son las que presentan mayores resistencias mecánicas dentro de las aleaciones de
aluminio. Además, ambas son tratables térmicamente. Se ha realizado un pequeño
estudio sobre el comportamiento a fatiga de las aleaciones y se han recopilado algunos
resultados de estudios técnicos de diversos autores con el fin de poder escoger la
aleación más adecuada. Las diferencias de composición se dan básicamente entre las
dos familias, siendo muy pequeñas las variaciones dentro de una misma serie. La serie
2xxx emplea como aleante principal el Cu y se ha empleado extensamente en
2 Diseño del rotor
61
estructuras aeroespaciales por su buen comportamiento a fatiga, destacando la 2024
con templado T3. Las propiedades de la 7475 son básicamente una modificación de la
7075, en la que se han mejorado las características reduciendo la cantidad de Si,
consiguiéndose un menor tamaño de grano que mejora el comportamiento a fatiga. La
7475 responde a los requerimientos
de aplicaciones que necesitan una
combinación
de
alta
resistencia
mecánica y larga vida a fatiga tanto
en aire como en entornos agresivos.
El resultado es una aleación con un
comportamiento excelente ante la
corrosión y la fatiga (Jhan & Luo,
1988). En general, sus propiedades
son mejores que las de sus hermanas
de la serie 7050 y 7075.
2.3.2.2 Elección de la aleación. Vida
a Fatiga
La elección de la aleación más
apropiada se basará en criterios de
resistencia a fatiga. El estudio se
realiza
según
el
procedimiento
clásico basado en las curvas S-N o
curvas de Wöhler. En estas curvas se
Figura 2.4: Obtención de las curvas SNP(Monsalve, 2003)
muestra la relación entre el esfuerzo alternante aplicado y el número de ciclos de vida útil de la
pieza ensayada, razón por la cual usualmente se las denomina curvas S-N (esfuerzo-número de
ciclos). En este contexto, se debe tener en cuenta que los datos típicos de un ensayo de fatiga
presentan una gran dispersión (típicamente un 8% en aceros). Debido a esto, todo estudio fiable
debe incluir un análisis de las probabilidades de fallo. Este análisis se puede representar con las
llamadas curvas S-N-P (Figura 2.4) o curvas de isoprobabilidad, que presentan, además de la
relación tensión-número de ciclos hasta el fallo, la probabilidad correspondiente al fallo en cada
punto de la curva. Usualmente se presentan tres curvas. La curva del 50% de probabilidad
acotada inferior y superiormente por la del 1% y la del 99%. En la Figura 2.5 se presenta la
2 Diseño del rotor
62
curva mencionada para un estudio del Al 2024-T3 sin tratamiento superficial (Monsalve, 2003)
y para un ensayo con Al 7075-T7351 (Figura 2.6).
Figura 2.5: Curva SNP del aluminio 2024-T3 (Monsalve, 2003)
Figura 2.6: Curva S-N Al 7075-T7351 (Valencia, 2003).
2 Diseño del rotor
63
Cabe destacar la distinta naturaleza de las curvas S-N del aluminio con respecto a
las que se obtienen de materiales férreos. Mientras éstas presentan una asíntota
horizontal a partir de un número determinado de ciclos, el aluminio no. Por lo tanto, se
puede definir claramente un valor de vida infinita en los metales férreos que coincide
con el valor de la tensión en dicha asíntota. El aluminio, al no presentar
comportamiento asintótico en su diagrama S-N, no tiene un límite bien delimitado de
vida infinita. Por conveniencia, se suele definir su límite de fatiga como la tensión
alternante que resulta en rotura para un número suficientemente alto de ciclos que
suele ser N=5 105, aunque se puede definir con cualquier otro, por ejemplo con N=107.
A continuación se muestran dos gráficas comparativas para distintas clases de
aluminios comerciales. En la primera gráfica se comparan las curvas S-N de tres de las
aleaciones propuestas, obteniéndose los mejores resultados para el Al 7475-T7351. La
segunda gráfica muestra las tasas de crecimiento de grieta para una amplia gama de
aluminios de uso estructural. De nuevo se observa la superioridad del Al 7475, esta vez
con templado T651, que presenta la menor tasa de crecimiento de grietas dentro de las
aleaciones contempladas.
Figura 2.7: Comparativa curvas S-N para tres de las aleaciones propuestas (Verma, 2001). Datos para 2024-T3,
(Osgood, 1982); 7075-T6 (Verma, 1997)
2 Diseño del rotor
64
Figura 2.8: Tasa de crecimiento de grietas para una amplia gama de aleaciones comerciales (Boyer, 1986)
En la Figura 2.7 se aprecian las curvas S-N para tres de las aleaciones propuestas (Verma, 2001). Se observa un
comportamiento comparable para fatiga de bajo ciclaje entre la 2024-T3 y la 7475-T7351. La 7075-T6 tiene una vida
notablemente inferior que las otras dos. Sin embargo, algunos investigadores (Eylon & Santner, 1979), (VanOrden,
1979) sugieren que la reducción en el contenido de Si y Fe no siempre implica una mejora en la vida a fatiga. Un
tratamiento termomecánico adecuado tiene una gran influencia en la vida a fatiga, pues se consigue retardar la
aparición de grietas al conseguir superficies más uniformes (Jahn & Luo, 1988).
Tras estos resultados parece claro que la aleación más resistente a la fatiga es la Al
7475, por lo que será la empleada en el diseño del eje del rotor. El templado será de
tipo T651. Su curva S-N representada en ejes logarítmicos (Figura 2.9) presenta un
límite de fatiga Sf de 240 MPa aproximadamente para una vida de N=107 ciclos. Se
observa que la zona de bajo ciclaje se extiende hasta los 2 104 ciclos y está representada
por un tramo lineal que se ha extrapolado a falta de datos. A partir de esta zona se
observa una importante reducción de las amplitudes hasta los 106 ciclos, donde aparece
un nuevo tramo lineal en el que las reducciones de la amplitud disminuyen de forma
2 Diseño del rotor
65
menos severa. Sin embargo, al tratarse de aluminio no se observa comportamiento
asintótico de la curva, por lo que no existe zona de vida infinita. Posteriormente se
evaluarán y aplicarán los correspondientes coeficientes de reducción del límite de
fatiga para obtener la curva de trabajo de la pieza.
σa [MPa]
5. µ 108
4.5 µ 108
4. µ 108
3.5 µ 108
3. µ 108
2.5 µ 108
1000.
10 000. 100 000. 1. µ 106 1. µ 107 1. µ 108
N
Figura 2.9: Curva S-N del Al 7475-T651 superplástico. (Boyer, 1986).
2.3.2.3 Determinación del límite de Fatiga del eje de Al 7475-T651
En el caso de no disponer de las curvas S-N de isoprobabilidad acotando la banda
de rotura, de debe aplicar un coeficiente de fiabilidad cf al límite de fatiga (en el caso
del aluminio se tomará el límite de fatiga como el valor de la tensión alterna que
provoca el fallo de la pieza en N=107 ciclos). Este coeficiente modela la probabilidad de
rotura a partir de la dispersión estadística de los datos empíricos. A falta de datos
específicos, como ocurre en este caso, se admite una desviación estándar de un 8%. A
partir de este valor y considerando una distribución aproximadamente gaussiana, el
coeficiente de fiabilidad se puede obtener como:
c f = 1− 0.08Z
Donde Z se obtiene de las tablas estadísticas. En la Tabla 2.6 se muestran varios
2 Diseño del rotor
66
valores de cf para distintas probabilidades de supervivencia. La fiabilidad R se calcula
a partir de la siguiente expresión:
R = (2 ⋅ π )
−
1∞
z2
−
2
2
∫e
⋅ dz
z
Z
Fiabilidad
R
Cf
0.0
0.4
1.0
2.0
2.25
2.5
3.0
3.5
3.7
50.0%
65.54%
84.13%
97.73%
99%
99.38%
99.87%
99.98%
99.99%
1.0
0.97
0.92
0.84
0.82
0.8
0.76
0.72
0.70
Tabla 2.6: Coeficientes de fiabilidad para distintas probabilidades de fallo.
La elección de éste y demás coeficientes para la corrección de límite de fatiga Sf´ se
presentan en la Tabla 2.7.
S′f = ks kd kt kr kT k f kk kwke kc S f = K ⋅ S f
ks
kd
Factor de acabado
de superficie
Factor de tamaño y
geometría
1.0
0.85
kt
Factor de forma de
trabajo
0.9
Kr
Factor de fiabilidad
0.82
kT
Factor de Tª
1.0
kf
Factor de fretting
0.95
kk
Factor de choque
1.0
kw
Factor de
soldadura
1.0
ke
Efectos diversos
1.0
kc
Factor de
concentración de
esfuerzos.
1.0
Se considera un acabado superficial pulido espejo.
Se ha estimado a falta de datos. Pondera la influencia del tamaño del eje en su
duración. Se considera un tamaño de la pieza mediano/grande.
Debido a que las probetas se ensayan a flexión, sus secciones están menos
solicitadas que si se aplicase una carga axial uniforme. Como el aluminio
trabaja con dos tensiones principales axiales, se aplica este coef. de reducción.
Se aplica para contemplar la dispersión de datos. 99 % de probabilidad de
supervivencia. Basado en el límite de fatiga con una desviación del 8%.
Tª de operación < 200ºC
Se incluye este coeficiente para tener en cuenta los posibles pequeños
desplazamientos entre el eje y el rotor en la interfaz de ajuste, que favorecen la
aparición de grietas. Se ha supuesto un ajuste preciso con poco deslizamiento.
Tiene en cuenta la brusquedad de aplicación de las cargas. Se supone que las
cargas se aplican lentamente.
No existen uniones soldadas
No se considera corrosión, recubrimientos, defectos de manufactura ni
esfuerzos residuales.
Este coeficiente carece de sentido al calcular las tensiones con EF, pues se
puede calcular con precisión la tensión en cada punto de la pieza. Su empleo
cobra sentido cuando se calculan las tensiones con métodos tradicionales y es
difícil evaluar las concentraciones de la misma.
2 Diseño del rotor
K
Factor de reducción
del límite de fatiga
67
K = ∏ ki
0.596
∀i
Tabla 2.7: Estimación de los coeficientes para el cálculo de la resistencia a fatiga S´f
Sf ´= K ⋅ Sf = 144
[MPa] N=107 ciclos
A partir de ahora, este será el límite de fatiga de la pieza con el que se trabaje.
2.3.3 Material para el volante del rotor
2.3.3.1
Fibra de carbono con matriz de resina Epoxi T300/2500
El material escogido para el diseño del volante del dispositivo es un composite
unidireccional de fibra de carbono con matriz de resina Epoxi, debido a su alto ratio
resistencia mecánica-densidad, que permite altas tasas de energía específica. Las
propiedades atribuidas al mismo se muestran en la Tabla 2.8 y presentan los valores
aceptados comúnmente por la mayoría de los autores.
densidad
Mód. elástico L
Mód. elástico T
Mód. de Poisson TL
Mód. de Poisson LL
Mód. elástico transversal LT
Res. tracción L
Res. compresión L
Res. tracción T
Res. compresión T
Res. cortante LT
Coef. dil. térmica L
Coef. dil. térmica T
Coef. dil humendad L
Coef. dil. humedad T
ρ
EL
ET
νTL
νTT
GLT
SutL
SucL
SutT
SucT
SGLT
αL
αT
αhL
αhT
1600
130
9.0
0.30
0.52
4.55
1800
1400
80
168
48
-0.3
28.1
0
0.6
Kg.m-3
GPa
GPa
GPa
MPa
MPa
MPa
MPa
MPa
10-6/ºC
10-6/ºC
%-1
%-1
Tabla 2.8: Propiedades mecánicas del composite T300/2500 en direcciones longitudinal y transversal a las fibras (L y
T).
2 Diseño del rotor
68
Las propiedades del material se deben poner en términos de las constantes elásticas
para poder modelar su comportamiento en el análisis con elementos finitos. Para el
estudio analítico se ha simplificado, suponiendo que el composite se comporta de
forma isótropa con los siguientes valores de las constantes elásticas
E
ν
ρ
130
0.3
1600
GPa
Kg.m-3
Tabla 2.9: Propiedades del composite como material isótropo para el estudio analítico.
Para el caso general de un material ortótropo la ley de Hooke se puede expresar
según la relación matricial (2). De todas las constantes que aparecen solo nueve son
independientes {Ex, Ey, Ez, Gyz, Gzx, Gxy, νyz, νxy y νxz}, pues al ser la matriz de
elasticidad simétrica se deben cumplir las siguientes relaciones
ν yx ν xy
ν zx ν xz
ν yz
Ey
Ez
Ey
=
1
Ex
ν yx
ε xx − E
y
ε
yy
ν zx
ε zz − E
z
=
ε
2
yz
0
2ε zx
2ε xy 0
0
Ex
−
ν xy
Ex
1
Ey
−
−
−
=
ν xz
Ex
ν yz
Ex
0
0
0
0
0
0
Ez
Ey
1
Ez
0
0
1
G yz
0
0
0
0
1
Gxz
0
0
0
0
ν zy
=
ν zy
Ez
(1)
0
0 σ
xx
σ
yy
0 σ
zz
⋅
σ
0 yz
σ zx
0 σ xy
1
Gxy
(2)
2 Diseño del rotor
Si el
69
material es transversalmente isótropo como ocurre con los composites
unidireccionales, existe un plano de simetría en el que las propiedades son isótropas.
Por lo tanto, existirá una dirección a lo largo de las fibras en la que tendremos una serie
de propiedades y otras dos direcciones ortogonales con la primera en las que las
propiedades serán iguales entre sí y distintas a aquellas asociadas con la dirección de la
fibra.
y
Figura 2.10: Alineación de la fibra y sistema de referencia
empleado en el análisis con EF para definir las ctes. elásticas
del composite.
x
El plano de simetría isótropa es el plano x-y. La dirección
radial coincide con x y la azimutal con z. La orientación del
sistema de referencia viene dada por el modelado axisimétrico
del rotor sobre el plano x-y en el cálculo con EF.
z
Para la alineación de las fibras representada
en la Figura 2.10, donde la dirección radial coincide con x y la circunferencial con z, se
obtienen los valores de la matriz de elasticidad a partir del siguiente desarrollo.
Como la fibra está orientada en z, las propiedades del material según dicho eje
corresponderán con las dadas en la Tabla 2.8 referidas a la dirección longitudinal L. Las
propiedades en x e y serán las correspondientes a la dirección transversal a la fibra T.
Se pueden obtener las siguientes igualdades a partir de los datos del composite.
Ex = Ey = ET
Ez = EL
(3)
Para los ratios de Poisson se observa que:
ν zx =ν zy =ν LT
ν xy =νTT
(4)
2 Diseño del rotor
70
νzy
νzx
νxy
νyx
Figura 2.11: Ratios de Poisson para direcciones L y T. Nota: νij es el ratio de Poisson correspondiente a un
contracción en j cuando se aplica una extensión en i.
Además, debido a la isotropía transversal tendremos
Gyz = Gzx = GLT
(5)
Como el plano x-y es el plano de simetría, se puede establecer la siguiente relación
elástica para el sólido bidimensional:
G xy =
Ey
2(1 + ν xy )
(6)
Si ahora tenemos en cuenta la condición de simetría de la matriz de elasticidad dada
por las ecuaciones (1), podemos expresar la ley de Hooke en términos de cinco ctes.
elásticas {EL, ET, GLT, νTT y νLT}, y obtener la matriz de elasticidad en función de ellas
(7).
1
E
T
ν TT
ε xx −
ε ET
yy − ν LT
ε zz E
L
=
ε
2
yz
0
2ε zx
2ε xy 0
0
−
−
ν TT
ET
1
ET
−
−
ν LT
EL
ν LT
0
0
EL
1
EL
0
0
0
0
0
0
1
G LT
0
0
0
0
1
G LT
0
0
0
0
ν LT
EL
σ
0
xx
σ yy
0
σ
zz
⋅
σ yz
0
σ zx
σ
0
xy
2 ⋅ (1 + ν TT )
ET
0
(7)
2 Diseño del rotor
71
El modelado del material con EF requiere los valores de las nueve ctes. elásticas {Ex,
Ey, Ez, Gyz, Gzx, Gxy, νyz, νxy y νxz}. A partir de las ecuaciones (1), (3) y (4) podemos
establecer las siguientes relaciones:
ν xy νTT
νxz νLT
ν yz νLT
Ex
Ex
Ey
=
ET
=
EL
=
EL
De donde se obtienen los tres ratios de Poisson. Los tres módulos de Young se
obtienen fácilmente de (3). Por último, los módulos de elasticidad transversal vendrán
dados por las expresiones (5) y (6). Los resultados obtenidos se muestran en la Tabla
2.10.
Ex
Ey
Ez
νxy
νxz
νyz
Gxy
Gxz
Gyz
9.0
9.0
130
0.52
0.02077
0.02077
2.96
4.55
4.55
GPa
GPa
GPa
GPa
GPa
GPa
Tabla 2.10: Valores de las nueve constantes elásticas del composite de fibra de carbono T300/2500 para el modelado
con EF.
2.3.4
Material para los anillos de fijación de las armaduras del sistema de
guiado. Fibra de vidrio unidireccional Scotch /Epoxi.
Para poder fijar sobre el rotor las armaduras móviles de los cojinetes magnéticos, es
necesario incorporar dos piezas con forma de anillo de sección prismática en los
extremos del eje (Figura 2.1). Dichas piezas irán acopladas mediante ajustes a presión
en el interior del eje, de forma que sirvan de soporte mecánico para poder instalar los
componentes móviles del sistema de guiado magnético. Además de permitir el
2 Diseño del rotor
72
acoplamiento de las armaduras de los cojinetes con el rotor, se consigue reducir el
radio de giro con el que éstas giran, con lo que se relajan las fuerzas de inercia y se
pueden conseguir valores admisibles de la tensión. Este punto es especialmente crítico,
pues el volante se ha dimensionado para trabajar a velocidades altas y aprovechar así
al máximo la fibra de carbono, y aumentar el radio de giro de las chapas magnéticas
supondría su destrucción.
El material que se va a emplear en la construcción de las piezas será un material
compuesto de fibra de vidrio y matriz de resina Epoxi con fibras orientadas en la
dirección circunferencial. El motivo de su elección es económico, pues la fibra de vidrio
es más barata que la de carbono y su resistencia mecánica es suficiente para la función
que va a desempeñar.
En la Tabla 2.11 se muestran los valores de las propiedades del material y en la
Tabla 2.12 se presentan los resultados obtenidos para las nueve constantes elásticas
necesarias para su modelado con EF. El procedimiento de cálculo que se ha seguido es
similar al empleado para el composite de fibra de carbono en el apartado precedente.
densidad
Mód. elástico L
Mód. elástico T
Mód. de Poisson TL
Mód. de Poisson LL
Mód. elástico transversal LT
Res. tracción L
Res. compresión L
Res. tracción T
Res. compresión T
Res. cortante LT
Coef. dil. térmica L
Coef. dil. térmica T
Coef. dil humendad L
Coef. dil. humedad T
ρ
EL
ET
νTL
νTT
GLT
SutL
SucL
SutT
SucT
SGLT
αL
αT
αhL
αhT
1800
38.6
8.27
0.26
0.60
4.14
1062
610
31
118
72
8.6
22.1
0
0.6
Kg.m-3
GPa
GPa
GPa
MPa
MPa
MPa
MPa
MPa
10-6/ºC
10-6/ºC
%-1
%-1
Tabla 2.11: Propiedades mecánicas del composite unidireccional de fibra de vidrio Scotch/resina Epoxi en direcciones
longitudinal y transversal a las fibras (L y T).
2 Diseño del rotor
Ex
Ey
Ez
νxy
νxz
νyz
Gxy
Gxz
Gyz
73
8.27
8.27
38.6
0.6
0.0557
0.0557
2.58
4.14
4.14
GPa
GPa
GPa
GPa
GPa
GPa
Tabla 2.12: : Valores de las nueve constantes elásticas del composite unidireccional de fibra de vidrio Scotch/resina
Epoxi para el modelado con EF.
2.3.5 Material para la armadura móvil del cojinete radial. Laminado
compuesto
El material empleado para diseñar la armadura móvil del cojinete radial es chapa
magnética con recubrimiento de Stabolit, cuyas propiedades y curva BH se exponen
con detalle en el capítulo de los cojinetes magnéticos. Se plantea un arreglo de la
laminación de tipo compuesto, empleándose dos tipos de acero distintos, uno de gran
resistencia mecánica que aporta resistencia al laminado, y otro de buenas propiedades
magnéticas como es el acero al Si con recubrimiento de Stabolit. Se ha decidido
emplear acero laminado para mejorar la dinámica de actuación del cojinete, pues se
reduce en gran medida el efecto de rechazo de campo que crean las corrientes parásitas
y se obtiene mejor controlabilidad. La contrapartida es la menor resistencia mecánica y
ductilidad de éstas con respecto al acero macizo. Para compensar esta deficiencia se
incorporan chapas de acero de alta resistencia AISI 4130 al laminado.
La tensión de diseño se mantendrá por debajo de los 350 MPa. La forma de fijación
del material laminado será a presión en el interior de los anillos de fibra de vidrio. El
procedimiento de montaje en el interior del eje se realizará mediante zunchado
térmico.
2 Diseño del rotor
74
2.3.6 Material para la armadura móvil de los cojinetes axiales
Como la orientación del campo magnético del cojinete axial es vertical, las corrientes
parásitas circularán en el plano perpendicular a la dirección de la inducción, es decir,
en el plano horizontal. Para paliar su efecto, es necesario disponer de un laminado en el
plano radial-axial. Pero a la alta velocidad de giro del rotor, los esfuerzos son muy
grandes y es esperable que el material laminado falle. Además, el mecanizado de la
pieza sería muy complicado.
Debido a estas circunstancias, se ha optado por emplear acero magnético macizo
con acero AISI 4130 al medio carbono. Con ello, nos aseguramos un mejor
comportamiento mecánico de la pieza, pero incorporamos el problema de las corrientes
parásitas en el desempeño de los cojinetes. Se buscarán posibles alternativas al acero
4130 que mejoren la resistencia mecánica y la conductividad eléctrica con el fin de
reducir el efecto negativo de las corrientes de Foucault. Las propiedades del acero
empleado y las posibles alternativas al mismo se remiten como al capítulo dedicado al
diseño del sistema de guiado.
2 Diseño del rotor
75
2.4 Tensiones de diseño
En la siguiente tabla se exponen las máximas tensiones admisibles para cada
material junto con el coeficiente de seguridad aplicado.
Materiales
Al-7475-T7351
FC T300/2500
FV
Scotch/Epoxi
Acero
4130
Res. tracción L
SutL
496
1800
1062
1150
MPa
Coef. de seguridad
n
2
3
3
2
-
Res. comp. L
SucL
496
1400
610
1150
MPa
Coef. de seguridad
n
2
3
3
2
-
Res. tracción T
SutT
496
80
31
1150
MPa
Coef. de seguridad
n
2
2
2
2
-
Res. comp.T
SucT
496
168
118
1150
MPa
Coef. de seguridad
n
2
2
2
2
-
Res. Fatiga modificado
S f´
144
N=107
-
-
555*
N=∞
MPa
Tensiones máximas de diseño
Smax tracción L
STL
250
600
354
575
MPa
Smax comp. L
SCL
250
465
205
575
MPa
Smax tracción T
STT
250
40
16
575
MPa
Smax comp. T
SCT
250
85
60
575
MPa
Tabla 2.13: Tensiones admisibles de trabajo para los materiales integrantes del rotor.
El límite dado para el acero es el del ensayo con maquina de Moore. No lleva incorporados los coeficientes de pieza y
forma de trabajo como en el caso del aluminio.
A pesar de que se ha obtenido el límite de fatiga para el eje, el tratamiento de este
fenómeno merece un estudio más detallado que se desarrollará en el apartado de
optimización del rotor para vida a fatiga.
2 Diseño del rotor
76
2.5 Estudio analítico del rotor
2.5.1 Introducción
La principal herramienta de cálculo que se ha empleado en el diseño del dispositivo
se basa en la aplicación computerizada del método de los elementos finitos mediante el
software de ANSYS Multiphisics. Este poderoso método arroja unos resultados de gran
precisión, que son extremadamente laboriosos de conseguir o incluso imposibles
cuando se pretende una resolución analítica del problema y su geometría o naturaleza
se alejan de lo trivial. Es por tanto, un método numérico fundamental en el diseño y
modelado de problemas complejos en ingeniería. Pero a diferencia de los resultados
analíticos, que nos orientan sobre los efectos que tienen los distintos parámetros
Figura 2.12: Modelo axisimétrico simplificado del rotor para el estudio analítico de las tensiones.
El composite que integra el volante es unidireccional y sus fibras se disponen en la dirección acimutal uθ. Los imanes
están emplazados en la cara interna del eje de aluminio formando una estructura de tipo arco romano para soportar
las fuerzas magnéticas de atracción que tienden a empujarlos hacia el hierro del estator de la máquina eléctrica.
del problema en su resolución y nos permiten en muchos casos entender con gran
perspectiva la física subyacente y orientar el diseño, el método de los EMF nos
devuelve resultados de forma numérica, en los que es muy difícil valorar la
sensibilidad de la solución a la variación de los distintos parámetros implicados, con lo
2 Diseño del rotor
77
que el diseño se realiza en ocasiones casi por tanteo. Por lo tanto, sin un conocimiento
previo profundo de la física que empapa el problema es muy difícil poder analizar de
forma crítica y fiable la validez de los resultados. Además, suele ser difícil encontrar un
grupo de parámetros de partida coherentes, en el sentido de proximidad relativa a los
objetivos de optimización. Es decir, se debe partir casi a ciegas de un punto inicial para
ir poco a poco refinando el diseño a base de estudios paramétricos que nos aporten
cierta información sobre la dirección de mejora. El objetivo de este apartado es hacer
un estudio analítico simplificado del problema a resolver, para tener un punto de
partida y una referencia en cuanto a órdenes de magnitud para el posterior análisis con
elementos finitos. En la Figura 2.12 se presenta el esquema simplificado del rotor que
se empleará en el estudio analítico del mismo.
2.5.2
Modelado del problema
Las dimensiones propuestas se han escogido de forma que cumplan los siguientes
requisitos de diseño:
Las dimensiones del dispositivo están acotadas por las limitaciones de
espacio en el techo del coche. El espacio disponible para todo el sistema es
un prisma de planta rectangular de 1 x 1.5 metros y 0.5 metros de altura. Se
ha escogido la opción de emplear un solo volante cuyo diámetro máximo no
debería sobrepasar los 0.8 metros y cuya altura deberá ser inferior a los 0.4
metros.
Se ha escogido instalar la máquina eléctrica en el interior del eje del rotor. La
elección está motivada por las restricciones de altura para la envolvente del
sistema. Como tan solo se dispone de 0.5 metros de altura incluyendo la
carcasa, no es posible construir una máquina de potencia suficiente si no se
aprovecha toda esta altura. Esta configuración del sistema permitirá
disponer de toda la altura para instalar tanto el volante de inercia como la
máquina eléctrica con lo que se pueden obtener mayores cantidades de
potencia eléctrica y energía acumulada. Por lo tanto, el diámetro interior del
2 Diseño del rotor
78
eje debe ser suficiente para poder instalar la corona circular de imanes y el
estator de la máquina eléctrica. Sin embargo, diámetros muy grandes
esforzarán el eje de forma excesiva al aumentar el radio de giro de éste. Por
el contrario, con diámetros pequeños será más difícil generar el par
necesario para cumplir el requisito de tiempo de recarga.
El espesor de pared del volante se debe vigilar ya que el esfuerzo normal
que sufrirá la fibra está relacionado directamente con el espesor de
composite.
Se debe conseguir la capacidad de almacenamiento de energía fijada en
20MJ. Por lo tanto, las dimensiones escogidas deben proporcionarnos una
inercia suficiente para poder conseguir la capacidad deseada a una
velocidad razonable. Se ha fijado como límite superior aproximado el valor
de 15000 rpm. Dicho límite está sujeto a variaciones que dependerán de las
tensiones que a dicha velocidad se generen en el rotor. Por lo tanto, se toma
el valor indicado como valor preliminar que habrá que ajustar de forma
iterativa a partir de la solución de la distribución de tensiones, para
conseguir que el material trabaje por debajo de su tensión límite admisible.
En el estudio analítico que sigue se ha tomado un valor de 13500 rpm,
obtenido al resolver para los valores de la geometría propuesta la siguiente
ecuación:
2⋅ E
J (1)
w=
siendo E=20 MJ la capacidad requerida de
almacenamiento de energía. El valor del
momento de inercia polar J se obtiene
como sigue:
Figura 2.13: Elemento diferencial para el
cálculo del momento de inercia polar del
rotor.
J =
∫∫∫ r
V
2
⋅ dm
(2)
2 Diseño del rotor
79
donde r es la distancia desde el elemento diferencial de masa dm al eje de
rotación polar. En un cilindro hueco homogéneo de radios ri y ro y longitud
L, la integral de volumen se puede convertir en una integral simple como se
muestra a continuación. Para cada r tendremos un diferencial de volumen
de dV=2̟rLdr. Por lo tanto el diferencial de masa que gira con radio r
respecto del eje polar será dm=ρdV y la integral (2) se puede expresar
entonces como:
ro
J = ∫ r ⋅ ρ ⋅ dV = 2πL ∫ r 3 ⋅ dr =
2
V
ri
(r
2
πL
o
4
− ri
4
)
Se debe optimizar en la medida de lo posible el peso del dispositivo, con lo
cual se buscará el diseño de menor peso que cumpla todas las restricciones
anteriores. La optimización del peso es importante, aunque deben
prevalecer las restricciones de espacio disponible, velocidad máxima y
esfuerzos admisibles.
La potencia de la máquina se debe maximizar en la medida de lo posible
para disminuir el tiempo de recarga. Sin embargo, según se estudió en el
predimensionamiento, un tiempo de carga de 16 segundos implicaría una
potencia cercana al MW, lo que supone un valor muy ambicioso que
probablemente no se pueda alcanzar con los condicionantes de peso y
volumen del dispositivo.
Teniendo en cuenta las restricciones anteriores se propone el siguiente conjunto de
valores para estudiar el problema analíticamente.
rn
ri
rf
ro
L
ρn
ρAL
ρFC
νAL
νFC
EAL
Radio interno de los imanes
Radio interno del eje del rotor
Radio externo del eje del rotor
Radio externo del volante
Longitud vertical del rotor
Densidad de los imanes
Densidad del aluminio
Densidad del composite
Ratio de Poisson del aluminio
Ratio de Poisson del composite
Módulo de elasticidad del Al
145
180
a optimizar
375
380
7500
2800
1600
0.33
0.3
78
mm
mm
mm
mm
mm
Kg/m3
Kg/m3
Kg/m3
GPa
2 Diseño del rotor
EFC
δ
w
80
Módulo de elasticidad del composite
Interferencia del ajuste
Velocidad angular (Ec 1)
130
a optimizar
13500
GPa
µm
rad/s2
Tabla 2.14: Parámetros geométricos, símbolos y propiedades de los materiales para el estudio analítico del rotor.
La geometría del problema se muestra en la Figura 2.14 y se puede subdividir en
dos cilindros huecos sometidos a los siguientes esfuerzos:
El cilindro interior representa el eje del rotor. Su superficie interior alberga
los imanes permanentes. Dado que estos están dispuestos formando una
corona circular sin cohesión circunferencial, se pueden sustituir por una
carga radial equivalente pi(w) aplicada en la cara interna del eje, pues su
estado tensional será de compresión monoaxial debido a la inercia. La
superficie externa está sometida a la presión de zunchado pf. Además, estará
sometido a la inercia de su propia masa. Por lo tanto, se puede modelar
como un cilindro en rotación presurizado interna y externamente.
El cilindro exterior representa el volante de composite. Los esfuerzos de
presurización a los que está sometido serán la presión de zunchado pf en su
cara interna. En la cara externa la presión será nula, pues el volante opera en
una atmósfera de vacío. Además, está sometido a los esfuerzos rotacionales
provocados por la inercia de su propia masa. Su modelado será análogo al
del eje.
El procedimiento seguido para el estudio analítico se basa en desarrollar las
ecuaciones que determinan la distribución de tensiones y desplazamientos en el caso
general de un cilindro de pared gruesa sometido a presurización interna y externa. A
continuación, se desarrollan las expresiones análogas para el análisis de las tensiones
producidas por la rotación. Finalmente, se obtiene la distribución total de tensiones
debida a la superposición de los efectos anteriores en cada componente del rotor, y se
establecen las condiciones de contorno apropiadas en la interfaz entre el eje y el
volante, dadas por el ajuste del zunchado. A partir de las expresiones obtenidas se
2 Diseño del rotor
81
realizará el dimensionamiento de las piezas y se estudiará la influencia de parámetros
como la interferencia o el espesor de pared del eje en la distribución de tensiones.
pi
pf
Figura 2.14: Modelado del rotor para el estudio analítico.
Los imanes se han modelado como una carga radial función de la velocidad pi(w), aplicada en la superficie interna del
eje del rotor. En la interfaz de contacto se tiene una presión de zunchado pf.
Cabe destacar la distinta naturaleza que presenta dicha distribución de esfuerzos
según el grosor de pared del cilindro. Para cilindros de pared delgada (d/e > 40) se
puede trabajar con la aproximación de que los esfuerzos circunferenciales o de aro σθ
son uniformes a lo largo del espesor de la pared. Esta suposición no es cierta en el caso
de cilindros de pared gruesa. Se trabajará con el modelo general de pared gruesa.
Además, se debe tener presente que la teoría utilizada se basa en materiales de
naturaleza isótropa, y en el diseño del volante se emplearán materiales
transversalmente isótropos (ortótropos) como son los composites de fibra de carbono y
vidrio embebidos en matriz polimérica (resina Epoxi), así como Aluminio de la serie
7000, el cual presenta propiedades isótropas. Es por ello esperable una cierta
divergencia entre los resultados que obtendremos en el estudio analítico con aquellos
que arrojará el posterior análisis con elementos finitos, lo cual no representa mayor
2 Diseño del rotor
82
problema, pues el objeto del presente desarrollo es obtener un orden de magnitud y un
mayor conocimiento de los fenómenos físicos involucrados, para poder orientar el
diseño con elementos finitos de forma más satisfactoria.
2.5.3 Desarrollo de las ecuaciones relevantes
rn
Radio interno de los imanes
mm
ri
Radio interno del eje del rotor
mm
rf
Radio externo del eje del rotor
mm
ro
Radio externo del volante
mm
L
Longitud vertical del rotor
mm
pi
Presión equivalente de los
imanes
Pa
pf
Presión de zunchado
Pa
ρ
Densidad
ν
Ratio de Poisson
E
Módulo de elasticidad
GPa
δ
Interferencia del ajuste
µm
w
Velocidad angular
σr
Tensión normal radial
Pa
σθ
Tensión normal circunferencial
Pa
Kg/m3
-
rad/s2
Tabla 2.15: Símbolos empleados en el desarrollo analítico de las tensiones.
Nota: Se hará uso de subíndices adicionales en los símbolos anteriores especificando el material a que van referido en
el caso de las ctes. elásticas, las tensiones y las propiedades físicas. Para las tensiones se empleará un segundo
subíndice cuando se quiera indicar que son generadas por un tipo concreto de esfuerzos. P ej: σθFCpi indicará tensión
normal circunferencial en la fibra de carbono generada por la presión interna.
2 Diseño del rotor
83
2.5.3.1 Cilindro de pared gruesa presurizado interna y externamente.
Se considera un cilindro hueco
de pared gruesa (d/e > 40) y
radios ri y ro presurizado interna y
externamente con presiones pi y
po
respectivamente.
cuerpo
y
la
axisimétricos,
esfuerzos
direcciones
Como
el
carga
no
son
existirán
cortantes
en
las
radial
y
circunferencial. No se considerará
carga
axial,
considera
pues
el
peso
despreciable.
se
Figura 2.15: Elemento diferencial para el estudio de las tensiones
El
mecánicas en el rotor.
zunchado creará una tensión axial por efecto Poisson que igualmente se puede
despreciar. En la Figura 2.15 se muestran las tensiones que actúan sobre un elemento
cilíndrico diferencial. Se emplearán coordenadas cilíndricas.
A partir de las deformaciones unitarias del elemento diferencial y la ley de Hooke,
se obtienen las siguientes relaciones esfuerzo-deformación para el estado de esfuerzo
biaxial.
εr =
εθ =
∂δ r
1
= (σ r − νσ θ )
∂r
E
(1)
δr
r
=
1
(σ θ − νσ r )
E
(2)
Aplicando equilibrio de fuerzas al elemento diferencial de la Figura 2.15 sin tener en
cuenta la ƒc, pues se considerará de forma independiente en el siguiente apartado
cuando se estudien los efectos rotacionales, y aproximando sen(dθ/2) ≈ dθ/2 se
obtiene:
σθ = r
dσ r
+σr
dr
(3)
Sustituyendo (3) en (1) y en (2), tenemos:
2 Diseño del rotor
84
dσ r
∂δr 1
= σ r (1 − ν ) − νr
∂r
E
dr (4)
δr
r
=
1
E
dσ r
σ r (1 − ν ) + r dr
(5)
Si ahora derivamos (5) y la igualamos con (4), obtenemos la siguiente ecuación
diferencial de segundo orden:
2
dσ r d dσ r
+ r
=0
dr dr dr
integrando se obtiene:
2σ r + r
dσ r
d
+ C1 = r 2σ r + C1r = 0
dr
dr
(
)
integramos de nuevo de nuevo y se obtiene:
σr = −
C1 C2
−
2 r2
Las dos condiciones de frontera necesarias para resolver la ecuación anterior en el
caso general de un cilindro con presurización interna y externa son las siguientes:
σ r (ri ) = − pi
σ r (ro ) = − po
Los signos negativos indican compresión. Resolviendo se obtiene la distribución
radial de tensiones siguiente:
r r
p i ri − p o ro + ( p o − pi ) ⋅ o i
r
σ r (r ) =
2
2
ro − ri
2
2
2
(6)
2 Diseño del rotor
85
Sustituyendo esta ecuación y la de su derivada en (3), se obtiene la expresión
general para los esfuerzos circunferenciales:
2
rr
2
2
pi ri − po ro − i o ( po − pi )
r
σ θ (r ) =
2
2
ro − ri
(7)
2.5.3.2 Cilindro de pared gruesa. Efectos rotacionales.
En este apartado desarrollaremos las expresiones que nos dan la distribución de
tensiones en un cilindro hueco de radios ri y ro en el que se supone que no existe
presurización alguna, pero en el que están presentes las fuerzas de inercia provocadas
por la rotación del mismo. Si suponemos que está rotando con velocidad w la fuerza
por unidad de volumen que sufre el elemento diferencial de la Figura 2.15 tendrá la
siguiente expresión:
ƒi = r w2 ρ
Si ahora consideramos el equilibrio de fuerzas del elemento diferencial llegamos a la
ecuación siguiente:
σθ − σ r
r
−
dσ r
− ƒi = 0
dr
(8)
Integramos (8) siguiendo el mismo procedimiento que en la sección precedente, y
teniendo en cuenta que ahora las condiciones de contorno son las siguientes:
σ r (ri ) = 0
σ r (ro ) = 0
Obtenemos las expresiones de la distribución de tensiones debida a los efectos
rotacionales:
2 Diseño del rotor
86
2
3 + ν ) ⋅ ρ ⋅ w 2 2
(
ri ro
2
2
⋅ ri + ro −
σ r (r ) =
−r
8
r
(9)
2
(
3 + ν ) ⋅ ρ ⋅ w 2 2
ri r0 1 + 3ν 2
2
σ θ (r ) =
⋅ ri + r0 +
−
⋅r
8
3 +ν
r
(10)
2.5.3.3 Carga equivalente de los imanes pi(w)
Los imanes se distribuyen formando una corona circular de radios rn y ri y altura L.
Al carecer de cohesión circunferencial, el estado tensional inducido en ellos por las
fuerzas de inercia será de compresión monoaxial en dirección radial. Su efecto sobre el
eje se puede modelar como una presión que es función de la velocidad de giro. A
continuación se desarrolla la expresión de pi(w). La masa de los imanes será:
(
mi = ρ n ⋅ π ⋅ L ⋅ ri − rn
2
2
)
Si consideramos que están girando a velocidad w sufrirán una aceleración
centrípeta de:
aC =
v2
= w2 R
R
Donde R es el radio de giro de la masa que se tomará como un valor medio,
R=
ri + rn
2
La fuerza total vendrá dada por:
FC = mi ⋅ aC
Como esta fuerza la ejerce la pared interna del eje sobre los imanes, en virtud de la
ley de acción y reacción, tendremos una fuerza igual y de sentido contrario aplicada en
el interior del eje que dividida por su superficie nos da la expresión de la presión
equivalente de los imanes:
2 Diseño del rotor
87
p i ( w) =
(
)
ρ n ⋅ w 2 ⋅ ri 2 − rn 2 ⋅ (rn + ri )
4ri
(11)
En la Figura 2.16 se puede apreciar la evolución de la carga de los imanes con la
velocidad.
Figura 2.16: Carga equivalente de los imanes pi(w). A wmax=13.500 rpm, pi=76.9 MPa
2.5.3.4 Superposición de efectos
Particularizando en el eje y en el volante las expresiones de la distribución de
tensiones obtenidas para cada tipo de carga (Ecs. 6, 7, 9 y 10) y superponiéndolas, y
teniendo en cuenta que la presurización interna del eje está dada por la presión de los
imanes pi (11), y la externa pf es la misma que la interna del volante, que no está
presurizado externamente, se obtiene la distribución de tensión en cada componente
del rotor.
2.5.3.4.1
Eje del rotor
Radio interno
Radio externo
Densidad del Al
Razón de Poisson
Módulo de elasticidad
ri
rf
ρAl
νAl
EAL
Tabla 2.16: Símbolos para los parámetros geométricos y propiedades de los materiales del eje.
2 Diseño del rotor
88
Presurización interna pi en ri:
rf 2
pi ri 1 − 2
r
σ rALpi =
2
2
rf − ri
2
rf 2
pi ri 1 + 2
r
σ θALpi =
2
2
rf − ri
2
Presurización externa pf en rf :
ri 2
p f rf 2 − 1
r
σ rALpe =
2
2
rf − ri
2
ri 2
p f rf 1 + 2
r
σθALpe = −
2
2
rf − ri
2
Efectos rotacionales:
σ rALw =
σ θALw =
(3 + ν Al ) ⋅ ρ Al ⋅ w 2
8
(3 + ν Al ) ⋅ ρ Al ⋅ w 2
8
2
2
ri r f
2
− r 2
⋅ ri + r f −
r
2
2
ri r f 1 + 3ν Al
2
⋅ ri + r f +
− 3 + ν
r
Al
2
⋅ r
Superposición de efectos
σ rAL = σ rALpi + σ rALpe + σ rALw
(12.a)
σθAL = σθALpi + σθALpe + σθALw
(12.b)
2 Diseño del rotor
2.5.3.4.2
89
Volante de inercia
Radio interno
Radio externo
Densidad del composite
Razón de Poisson
Módulo de elasticidad
rf
ro
ρFc
νFc
EFc
Tabla 2.17: Símbolos para los parámetros geométricos y propiedades de los materiales del volante.
En este caso solo se considera la presurización interna pf en la interfaz de contacto
eje-volante. Es importante remarcar que las ecuaciones obtenidas en el desarrollo
teórico que se ha seguido están basadas en materiales isótropos. El material del rotor es
un material compuesto de fibra de carbono con matriz de resina Epoxi que presenta
una naturaleza ortótropa o transversalmente isótropa. Por lo tanto, siendo rigurosos,
necesitaríamos conocer las cinco constantes elásticas independientes del material para
poder estudiar su comportamiento mecánico. Pero un estudio analítico riguroso
requeriría un análisis profundo del problema basado en la teoría de la elasticidad y
está fuera del alcance de este proyecto. Sin embargo, se espera que un análisis
simplificado considerando el composite como material isótropo nos devuelva
resultados aceptables, sobre todo en lo que se refiere a los valores de las tensiones
circunferenciales, pues el valor del módulo de Young con el que se ha trabajado es el
correspondiente a la dirección longitudinal de la fibra del material. El módulo de
elasticidad en dirección normal a las fibras es mucho menor que el valor que se ha
empleado en los cálculos, por lo que es esperable un importante error en el cálculo de
los esfuerzos y desplazamientos radiales en el composite.
El modelado de la anisotropía del material compuesto y el estudio detallado de las
tensiones y los desplazamientos se ha realizado con el MEF y se presenta al final del
presente capítulo.
2 Diseño del rotor
90
Presurización interna pf en rf
ro 2
p f rf 1 − 2
r
σ rFCpi =
2
2
ro − rf
ro 2
p f rf 1 + 2
r
σθFCpi =
2
2
ro − rf
2
2
Efectos rotacionales
σ rFCw =
σ θFCw =
(3 + ν FC ) ⋅ ρ FC ⋅ w 2
8
(3 + ν FC ) ⋅ ρ FC ⋅ w 2
8
2
2
r f ro
2
− r 2
⋅ r f + ro −
r
2
2
r f ro 1 + 3ν FC
2
−
⋅ r f + ro +
r
3 + ν FC
2
⋅ r
Superposición de efectos
σ rFC = σ rFCpi +σ rFCpe+σ rFCw
(13.a)
σθFC = σθFCpi + σθFCpe +σθFCw
(13.b)
Una vez superpuestos los efectos de todas las cargas, ya disponemos de las
expresiones analíticas de la distribución de tensiones tanto en el eje como en el volante,
y podemos calcular los desplazamientos radiales en la interfaz eje-volante ( r = rf ) a
partir de la ecuación (14) obtenida a partir de la (2):
2 Diseño del rotor
91
δr =
r
(σθ −νσr )
E
(14)
Como el ajuste entre el eje y el volante es un ajuste térmico a presión, el radio del
agujero (volante) tenderá a aumentar y el del eje se reducirá. Como se conoce la
interferencia δ, pues se fija al diseñar el ajuste, podemos establecer una relación entre
los desplazamientos radiales de ambas partes y la interferencia como se sigue a
continuación.
Aplicando (14) con las ecuaciones (12), se obtiene el desplazamiento radial del eje en
la interfaz:
δ rAL (rf ) =
rf
EAL
(σ
θAL
(rf ) −ν ALσ rAL (rf ))
Procediendo de la misma forma pero empleando las ecuaciones (13) se calcula el
desplazamiento de la pared del volante en el radio de ajuste:
δ rFC (rf ) =
rf
EFC
(σ
θFC
(rf ) −ν FCσ rFC (rf ))
La suma del valor absoluto de ambos desplazamientos debe ser igual a la
interferencia fijada al diseñar el ajuste, por lo que se plantea la siguiente relación:
δ = δ rFC (rf ) − δ rAL (rf )
(15)
Si ahora resolvemos la ecuación (15) en pf obtendremos la expresión de la presión de
zunchado que dependerá de las siguientes variables:
pf = pf ( ri, rf, r0, δ, w, pi, ctes elásticas de materiales, densidades de los materiales)
Introduciendo la expresión obtenida de la carga equivalente de los imanes pi (11),
pi = pi ( rn, ri, w, ρn )
2 Diseño del rotor
92
Obtenemos la dependencia funcional de pf con los parámetros del problema que
toma la siguiente forma:
pf =pf ( rn , ri , rf , ro, δ, w,EAL, EFC,νAL,νFC, ρAL, ρFC, ρn )
(16)
A partir de los valores de la geometría del problema, de los materiales aplicados, del
valor del ajuste de zunchado δ, y de la velocidad angular, se obtiene el valor de la
presión de zunchado pf. A partir del esta expresión e introduciéndola en las
expresiones de σrAL(r), σθAL(r), σrFC(r) y σθFC(r) (Ecs 12 y 13), se obtiene el valor de las
tensiones en toda la geometría del rotor a esa velocidad. Asimismo, se pueden obtener
las deformaciones aplicando las ecuaciones de la ley de Hooke (Ecs 1 y 2).
2.5.4
Optimización del modelo. Análisis paramétrico
A partir de este punto se trabajará en la búsqueda de una geometría para el rotor
que nos proporcione un punto de partida suficientemente bueno para el posterior
análisis y optimizado con EF. Se realizarán varios estudios paramétricos para entender
mejor el comportamiento mecánico del rotor y poder localizar las variables más
influyentes en su diseño. Se trata de dimensionar el rotor (eje y volante), escogiendo los
valores óptimos de la geometría y del ajuste del zunchado dentro de un margen de
valores prefijado. Dicho margen viene impuesto por las limitaciones físicas del ajuste
térmico y el espacio disponible para instalar la carcasa del dispositivo (pág 36 epígrafe
1.5.2.2). Como se dispone de 0.5 metros de altura total para la carcasa de la máquina, y
se deben conseguir 20 MJ de energía almacenable operando a velocidades no
superiores a las 15.000 rpm, se debe emplear toda la altura posible para el volante, ya
que de otro modo el radio necesario para alcanzar el requisito de capacidad de
almacenamiento superaría las dimensiones máximas permitidas. Teniendo en cuenta el
tamaño previsto para los cojinetes y la propia pared de la carcasa, se ha fijado un valor
de 0.38 metros de altura para el volante. Por otra parte, el radio máximo debe ser
2 Diseño del rotor
93
inferior a los 0.4 metros, pues se debe dejar cierto margen para poder construir las
paredes laterales de la carcasa con un espesor suficiente para soportar los posibles
impactos derivados de la destrucción del volante en caso de accidente. Además, se
debe prever un radio interno del eje suficiente para poder instalar los imanes y una
máquina de potencia suficiente. Los parámetros fijados a priori y los márgenes para las
variables de diseño se obtuvieron en el apartado (2.5.2, pág. 77) a partir de las
consideraciones que se acaban de comentar. En la se presentan de nuevo a modo de
resumen los parámetros geométricos con los que se va a trabajar en esta sección.
L
Altura del rotor
380
[mm]
ri
Radio interno del eje
180
[mm]
rf
Radio externo del eje
185-205
[mm]
e
Espesor del eje e = rf - ri
5-25
[mm]
ro
Radio externo del volante
380 aprox.
ro=f(rf, wmax) / E=20MJ
[mm]
δ
Interferencia de ajuste para el zunchado
200-600
[µm]
Tabla 2.18: Valores de los parámetros fijos y márgenes para las variables de diseño. El radio ro se ajustará
al final de forma que se obtenga la J necesaria para cumplir el requisito de capacidad.
El objetivo es optimizar el diseño del rotor en cuanto a capacidad de
almacenamiento de energía, minimizando en la medida de lo posible los esfuerzos
mecánicos y el peso, ciñéndose en todo momento a las restricciones que imponen la
resistencia mecánica de los materiales y el espacio disponible.
El estudio parte de las ecuaciones desarrolladas en los apartados anteriores para la
distribución de tensiones, analizándose su dependencia funcional con uno o varios
parámetros del sistema como la interferencia de zunchado δ, el espesor de pared del
eje e = rf - ri o la velocidad angular w. El procedimiento de análisis será gráfico, sobre
todo cuando trabajemos con dos variables. La razón es que se obtiene una mejor
perspectiva que con las relaciones analíticas que adquieren una notable complejidad, y
se puede orientar mejor el diseño. El cálculo y la representación de todas las funciones
se ha realizado con el motor de cálculo de Wolfram Mathematica 7.0. No
2 Diseño del rotor
94
presentaremos en este documento las expresiones analíticas de las funciones
calculadas, pues son de una complejidad
notable y no harían si no enturbiar la
comprensión del presente análisis. El estudio se centrará en los puntos más esforzados
del material de cada componente, que se encuentran en el radio interno de cada pieza
del rotor, es decir, en ri para el eje y en rf para el volante. Por lo tanto, cuando se hable
de la dependencia funcional de la tensión mecánica con respecto a alguna variable
como la velocidad angular w, el ajuste de zunchado δ, etc, se entenderá que dicha
tensión es la de los puntos de la superficie interior del eje o del volante, según proceda.
Para el cálculo de la resistencia mecánica del eje, se ha empleado la tensión equivalente
de Von Mises según la siguiente expresión:
σeqvVM = σr 2 +σθ 2 −σrσθ
(17)
El cálculo de la resistencia mecánica del composite se ha realizado comparando de
forma independiente las tensiones normales radial y circunferencial del material, con
las respectivas resistencias de la fibra en las direcciones transversal y longitudinal.
Recordemos que la fibra está orientada circunferencialmente, por lo que la tensión
acimutal del volante coincidirá con la que soporta la fibra longitudinalmente y la
radial, con la que sufre en dirección transversal.
2.5.4.1 Estudio del eje.
2.5.4.1.1
Tensiones radiales
Comenzaremos estudiando la dependencia funcional de la tensión radial máxima
en el eje con la velocidad angular w y la interferencia de zunchado δ. Para ello, basta
con retomar las ecuaciones de la distribución de tensiones (Ecs 12 y 13) y sustituir la
expresión de pi y los valores de los demás parámetros de la Tabla 2.18, salvo w, que
dejaremos como variable independiente. El valor del radio externo del eje rf no es
necesario definirlo por el momento, pues la tensión radial en la cara interna del eje es
independiente del valor que tome este parámetro. Después, se resuelve (15) en pf,
dejando como segunda variable independiente la interferencia δ. Así, obtendremos la
2 Diseño del rotor
95
expresión de pf = pf (w,δ). Reintroduciendo pf en las expresiones de la tensión radial del
eje (12a), y haciendo r = ri para estudiar los puntos más esforzados del material, se
obtendrán las expresiones analíticas de la tensión de la pieza en su cara interna en
función de w y δ.
La variación de la tensión radial normal en la cara interna del eje (r=ri) será
absolutamente independiente de δ y de rf, pues tan solo puede depender de la carga de
los imanes pi(w), y en consecuencia de w. Por lo tanto, la gráfica de σrAL(ri) mostrada en
la Figura 2.17 debe ser similar a la curva de pi(w) pero cambiada de signo ya que los
esfuerzos son de compresión.
PresionHPa L
6 µ 107
4 µ 107
2 µ 107
2000 4000 6000 8000 1000012000
wHrpmL
Figura 2.17: σrAL(ri) vs w y δ y carga pi (w) de los imanes.
Tensión normal radial en el radio interno del eje del rotor en función de w y δ. Se observa que la tensión es
independiente de δ. Se comprueba que para una w=13500 rpm la presión es de aproximadamente 76.9 MPa
independientemente del valor de la interferencia del ajuste, lo cual nos sirve para comprobar la corrección de los
cálculos, pues dicho valor debe coincidir con el valor de la carga pi de los imanes a esa velocidad. Si representásemos la
misma función evaluada en rf observaríamos que son prácticamente similares, aunque los valores disminuyen muy
levemente conforme aumenta el radio. Esto se debe a que el espesor de pared del eje es bastante pequeño comparado
con su diámetro y el cociente d/e = (2 rf)/(rf-ri) = 38 está muy cercano al valor límite de 40, a partir del cual se puede
considerar que la tensión radial es uniforme a lo largo del espesor de pared sin cometer un error apreciable.
2 Diseño del rotor
2.5.4.1.2
96
Presión de ajuste
La presión de zunchado es la responsable de unir solidariamente eje y volante. Por
lo tanto, se debe vigilar que sea positiva en todo el margen de velocidad en el que va a
trabajar el volante, pues de lo contrario supondría que éste se ha despegado del eje. En
nuestro sistema, el efecto de la velocidad y la presencia de los imanes en la cara interna
del eje hacen que se incremente la presión conforme aumenta la velocidad. Por lo tanto,
no tendremos problemas en cuanto a la solidez de la unión. Sin embargo, la presión de
la interfaz está aplicada directamente sobre el composite en dirección transversal a la
fibra y es crítica, pues la resistencia de éste ante cargas perpendiculares a la fibra es
muy baja y podría ser causa de rotura. La tensión máxima admisible SCT empleando un
coeficiente de seguridad de 2 es de 85 MPa (Tabla 2.13).
rf=185 [mm], e=5 [mm]
rf=205 [mm], e=25 [mm]
Figura 2.18: Presión de ajuste pf en función de w y δ para dos diseños extremos.
Como pf es la presión en la interfaz eje-volante (r = rf), la gráfica de la tensión radial
normal en rf (radio de zunchado) será la misma multiplicada por -1, es decir, la
simétrica respecto al plano x-y, y siempre es de compresión. Se observa poca variación
de la presión con respecto a δ, y una gran dependencia con la velocidad. El valor
máximo se alcanza a máxima velocidad (13500 rpm) y con zunchado máximo en ambos
diseños. Este valor es la tensión que sufrirá la fibra del composite en la zona de ajuste y
es crítico ya que está aplicada en la dirección transversal de la fibra.
2 Diseño del rotor
97
rf=185 [mm], e=emin=5 [mm]
rf=205 [mm], e=emax=25 [mm]
Figura 2.19: Efecto de la interferencia δ en la presión de ajuste para dos diseños extremos.
Se han representado dos curvas de pf (w) en cada gráfica que corresponden a los valores extremos admisibles para la
interferencia de zunchado δ. La curva roja corresponde al mínimo valor de δ=200 [µm]. La curva azul se da para un
valor de δ=600 [µm]. Se observa que no existen diferencias notables entre las curvas, teniendo en cuenta que estamos
analizando dos diseños completamente extremos, con lo que se deduce que la dependencia funcional de pf con δ es muy
pequeña. Los valores críticos se dan a wmax y suponen unas presiones de 74.5 y 78.7 [MPa] en el diseño con emin y
65.2 y 81.5 [MPa] en el segundo diseño de emax. En ninguno de los casos se sobrepasa la tensión máxima admisible de
diseño SCT de 85 MPa. Por lo tanto, desde el punto de vista de la resistencia a compresión transversal del composite, el
óptimo se da para espesor de pared del eje máximo e=25 mm con zunchado δ mínimo.
2.5.4.1.3
Tensión circunferencial y equivalente Von Mises.
rf=185 [mm], e=5 [mm]
seqvHPa L
2.5 µ 108
2.0 µ 108
1.5 µ 108
1.0 µ 108
5.0 µ 107
2000 4000 6000 8000 10000 12 000
wHrpm
2 Diseño del rotor
98
rf=195 [mm], e=15 [mm]
seqvHPa L
2.5 µ 108
2.0 µ 108
1.5 µ 108
1.0 µ 108
5.0 µ 107
2000 4000 6000 8000 10000 12 000
wHrpmL
rf=205 [mm], e=25 [mm]
seqvHPa L
3.0 µ 108
2.5 µ 108
2.0 µ 108
1.5 µ 108
1.0 µ 108
5.0 µ 107
2000 4000 6000 8000 10000 12 000
Interferencia δ [µm]
200
300
400
450
500
600
wHrpmL
Color de la curva
azul
verde
azul claro
rojo
lila
amarillo
Figura 2.20: Tensión acimutal y equivalente Von Mises en el eje para distintos valores del espesor de pared
En la columna izquierda de la Figura 2.20 se presentan las gráficas correspondientes
a los campos escalares de la tensión circunferencial σθ obtenidos en función de δ y w
para tres diseños posibles del espesor de pared del eje. En todos los casos se observa
que existen esfuerzos de tracción y compresión. La compresión aparece a bajas
velocidades como consecuencia del ajuste a presión. Conforme la velocidad aumenta,
la compresión va disminuyendo hasta convertirse en tracción al atravesar el plano z=0.
Se observa que la influencia del ajuste δ y la w sobre la tensión es similar en las tres
gráficas, obteniéndose los mayores valores de compresión a velocidad cero y con
máxima interferencia, y las mayores tracciones con mínima interferencia y velocidad
2 Diseño del rotor
99
máxima. El valor de la tensión circunferencial máxima se incrementa ligeramente con
el espesor de pared del eje, o lo que lo mismo, con rf, pues el radio interno se mantiene
fijo en todo momento. Sin embargo, en ninguno de los casos se sobrepasa el límite de
tensión de diseño admisible para el aluminio de 250 MPa.
Mayor interés tienen las gráficas presentadas en la columna derecha que nos
muestran el valor de la tensión equivalente de Von Mises en función de la velocidad w
para todo el rango de ajustes posible en cada una de las geometrías presentadas. En
ellas se puede observar que para un mismo ajuste δ las tensiones a w=0 disminuyen
conforme aumentamos el espesor de pared, pero aumentan los valores a wmax. En la
primera gráfica todas las tensiones están dentro del rango admisible, pero al ir
aumentando el espesor de pared y disminuyendo el ajuste se obtienen curvas
inadmisibles, como la curva azul de la segunda gráfica (δ=200 µm), o las curvas azul y
verde de la tercera (δ=200 y 300 µm) respectivamente. Estos resultados indican que la
magnitud del ajuste es un parámetro crítico en el diseño y posterior montaje.
En este punto es interesante recordar que el dispositivo opera en régimen normal
entre wmin=wmax/2 y wmax. Es decir, la zona en la que va a trabajar normalmente el eje es
la zona de la mitad derecha de las curvas y por lo tanto es donde se van a producir la
mayoría de los ciclos que fatigan el material. Evidentemente, cada vez que se detenga
el dispositivo o cada vez que se ponga en marcha, se alcanzará el punto extremo
izquierdo de las gráficas y se recorrerá la curva completamente. Pero si estimamos una
vida de diez años para el sistema, podemos hacer la siguiente previsión para el número
de ciclos completos que sufrirá el material. Supongamos que el dispositivo opera los
365 días del año y se conecta dos veces al día. El número de ciclos de carga-descarga
total del rotor será inferior a 8000. Si comparamos este valor con los 700.000 ciclos de
trabajo que se estiman operando entre wmin y wmax parece claro que es ventajoso para el
material en cuanto a su desgaste por fatiga, operar con los mínimos valores posibles de
la tensión en el intervalo wmin-wmax . Según este criterio, las curvas óptimas serían
aquellas que presenten los mínimos valores de la tensión en la mitad derecha de las
curvas, a pesar de que esto implicaría tener mayores tensiones con el rotor parado. Así,
un diseño razonable se movería entre las curvas amarilla y lila de la primera gráfica
(rf=185 mm). Sin embargo, no se puede cuantificar la influencia que tendrán los ciclos
completos de tensión sin un estudio de fatiga detallado por lo que se estudiará este
fenómeno en profundidad para orientar el diseño de forma más robusta.
2 Diseño del rotor
2.5.4.1.4
100
Dependencia de la tensión con el espesor de pared e
A continuación se presenta un estudio que muestra la relación existente entre la
tensión máxima del eje, que siempre se da en su radio interno a cualquier velocidad de
giro, y los dos parámetros de diseño que se pretenden optimizar, δ y rf. El
procedimiento seguido ha sido obtener la expresión analítica de las tensiones normales
radial y circunferencial en función de δ y rf a partir de las expresiones (12) y (13).
Después, se ha resuelto la ecuación (15) en pf, obteniéndose así la función pf (δ, rf). A
partir de esta expresión, y reintroduciéndola en las ecuaciones (12) y (13) se han
obtenido las expresiones de σθ y σr que dependen de δ, rf y r. A partir de ellas, se ha
calculado la tensión equivalente de Von
Misses según la expresión (17) y se a
particularizado en r = ri. Este estudio se ha realizado para distintos valores de ajuste δ
que barren el intervalo que se considera factible en un zunchado térmico. El intervalo
va aproximadamente desde 0.5 hasta 1.5 x (diámetro nominal) y toma los siguientes
valores:
δ ∈ (200,600)
[µm]
A continuación se muestran los resultados de este estudio:
δ=200[µm]
w=13500 [rpm]
seqvHPaL
w=0 [rpm]
seqvHPaL
7.8 µ 107
7.7 µ 107
2.9 µ 108
7.6 µ 107
7.5 µ 107
2.8 µ 108
2.7 µ 108
7.4 µ 107
7.3 µ 107
2.6 µ 108
0.190 0.195 0.200 0.205
rfH
0.190 0.195 0.200 0.205
rfH
2 Diseño del rotor
101
w=13500 [rpm]
δ=300[µm]
w=0 [rpm]
seqvHPaL
seqvHPaL
2.6 µ 108
1.16 µ 108
2.5 µ 108
1.14 µ 108
2.4 µ 108
1.12 µ 108
1.10 µ 108
2.3 µ 108
0.190
δ=400[µm]
0.195
0.200
0.190 0.195
0.205
w=13500 [rpm]
rf
w=0 [rpm]
seqvHmL
2.3 µ 108
2.2 µ 108
seqvHmL
1.56 µ 108
1.54 µ 108
1.52 µ 108
1.50 µ 108
1.48 µ 108
1.46 µ 108
2.1 µ 108
2.0 µ 108
1.9 µ 108
0.190 0.195 0.200 0.205
δ=500[µm]
0.200 0.205
rf
0.190 0.195 0.200 0.205
rfH
w=13500 [rpm]
seqvHPaL
1.9 µ 108
1.8 µ 108
1.7 µ 108
1.6 µ 108
1.5 µ 108
0.185 0.190 0.195 0.200 0.205
w=0 [rpm]
seqvHPaL
1.95 µ 108
1.90 µ 108
1.85 µ 108
rfHm
0.190 0.195 0.200 0.205
rfHmL
2 Diseño del rotor
δ=600[µm]
102
w=13500 [rpm]
w=0 [rpm]
seqvHPaL
1.6 µ 108
seqvHPaL
2.35 µ 108
1.5 µ 108
1.4 µ 108
2.30 µ 108
2.25 µ 108
1.3 µ 108
1.2 µ 108
2.20 µ 108
0.190 0.195 0.200 0.205
rf
rf
0.190 0.195 0.200 0.205
Figura 2.21: Estudio paramétrico de la tensión del eje en función del espesor de pared e para distintos valores del
ajuste δ.
En el estudio presentado en la Figura 2.21 se vuelve a hacer patente la importancia
del parámetro de ajuste δ. Se han representado las gráficas de la tensión equivalente de
Von Mises en función de w y rf (equivalente al espesor de pared del eje e = rf-ri, pues ri
se mantiene fijo). Además, se presentan las curvas resultantes de la intersección de los
planos w=wmax y w=0 con la superficie. En todos los casos se aprecia la influencia del
incremento del espesor de pared, que resulta positivo a velocidad cero, pues las
tensiones máximas del eje se reducen. Sin embargo, al incrementar rf, la tensión
máxima a wmax también crece, y además, lo hace proporcionalmente más que lo que
disminuye la tensión con el rotor parado. Es decir, al reducir el espesor del eje, se
mejora el comportamiento a altas velocidades y se empeora con el rotor parado, pero la
mejora compensa, sobre todo si tenemos en cuenta que la mayor parte de las tensiones
cíclicas se darán operando a velocidades superiores a wmax/2.
En cuanto a la influencia de δ, se obtienen las mismas conclusiones que en el estudio
precedente, pues se aprecia que los valores de ajuste por debajo de los 400 µm implican
trabajar con tensiones inadmisibles a altas velocidades. Los valores más razonables
parecen situarse entre las gráficas correspondientes a los mayores ajustes y con el
menor espesor de pared, es decir, con valores de δ entre 400 y 600 µm, aunque se
esperará a obtener los resultados del estudio a fatiga para poder determinar el óptimo
con mayores garantías.
2 Diseño del rotor
103
A continuación, se muestran las tensiones en función de la velocidad
correspondientes a tres espesores de pared para varios valores de δ.
En la ¡Error! No se encuentra el origen de la referencia. se han representado tres gráficas
correspondientes a tres ajustes de zunchado δ. En cada gráfica se ha representado la
tensión de los puntos más esforzados del eje en función de la velocidad para tres
espesores de pared e=rf-ri diferentes.
δ=200 [µm]
s eqvHPa L
3.0 µ 108
2.5 µ 108
2.0 µ 108
1.5 µ 108
1.0 µ 108
5.0 µ 107
2000
4000
6000
8000
10 000
12 000
10 000
12 000
w HrpmL
δ=450 [µm]
seqvHPa L
2.0 µ 108
1.5 µ 108
1.0 µ 108
5.0 µ 107
2000
rf=185 mm/e=5 mm
rf=195 mm/ e=15 mm
rf=205 mm/ e=25 mm
4000
6000
8000
curva roja
curva verde
curva roja
w HrpmL
2 Diseño del rotor
104
δ=600 [µm]
seqvHPa L
2.0 µ 108
1.5 µ 108
1.0 µ 108
2000
4000
rf=185 mm/e=5 mm
rf=195 mm/e=15 mm
rf=205 mm/e=25 mm
6000
8000
10 000
12 000
w HrpmL
curva roja
curva verde
curva roja
Figura 2.22: Estudio de la tensión equivalente en el eje en función de w para distintos valores del espesor de pared e y
del zunchado δ.
2.5.4.2 Estudio del volante
Los puntos más esforzados se localizan en el radio interno rf. Como se puede
apreciar en la el valor de la tensión es poco sensible a la variación del radio externo del
eje rf y de la interferencia de zunchado δ dentro del margen de valores considerado,
sobre todo en lo que se refiere a las tensiones circunferenciales. Las tensiones radiales
dependen ligeramente de δ, aumentando con este. También dependen levemente de rf,
aumentando al incrementarse el espesor de pared del eje. Sin embargo, aunque la
dependencia más importante de la tensión radial se da con el espesor de la capa de
composite como se demostró en el predimensionamiento del sistema (pág. 45, epígrafe
1.5.4.4), no tenemos margen de maniobra para modificar dicho parámetro, debido a las
restricciones geométricas y de capacidad del sistema. La dependencia evidente es con
la velocidad, aumentando los esfuerzos con esta. Sin embargo, no podemos modificar
la velocidad de operación sin perder capacidad de almacenamiento de E, por lo que no
2 Diseño del rotor
105
es una variable de diseño a optimizar. Para δ y rf, las dependencias son despreciables
por lo que concluimos que no son parámetros críticos en el diseño del volante en lo que
se refiere al esfuerzo acimutal del composite. En todos los casos se ha empleado un
ro= 0.375 mm.
rf=185 [mm], e=5 [mm]
σr ( r = rf )
σθ ( r = rf )
2 Diseño del rotor
106
rf=195 [mm],
e=15 [mm]
σθ ( r = rf )
rf=205 [mm],
σr ( r = rf )
e=25 [mm]
σr ( r = rf )
σθ ( r = rf )
Figura 2.23: Representación de las tensiones máximas en el composite en función de w y δ para tres espesores de la
pared del eje.
2 Diseño del rotor
107
2.6 Análisis de fatiga. Optimización de δ
2.6.1 Introducción
Tras el estudio paramétrico se ha demostrado la gran influencia que tiene el
parámetro de ajuste δ con la distribución de tensiones. El espesor de pared, e, a pesar
de no ser tan crítico como δ, también influye en el estado tensional del eje. El estudio
realizado nos indica que los esfuerzos máximos circunferenciales (que son los más
críticos) siempre aumentan con el espesor de pared, por lo que se ha dimensionado e
con el valor mínimo considerado de 5 mm. En la Tabla 2.19 se muestran los parámetros
de la geometría del rotor y los tres valores de ajuste δ que emplearemos en el estudio
que sigue.
rn
ri
rf
ro
L
δ
wmax
Radio interno de los imanes
Radio interno del eje del rotor
Radio externo del eje del rotor
Radio externo del volante
Longitud vertical del rotor
Interferencia de zunchado Diseños
A/B/C
Máxima velocidad de operación
145
180
185
375
380
200/450/650
(0.54/1.22/1.76) x 2rf x10-3
13500
mm
mm
mm
mm
mm
µm
rad/s2
Tabla 2.19: Parámetros geométricos del rotor para el estudio de fatiga
El valor de las tensiones máximas que aparecen en el aluminio para la geometría
escogida no superan en ningún caso los valores admisibles de diseño de 250 MPa. Pero
debemos considerar el hecho de que dichas tensiones son oscilantes, y recorrerán
numerosos ciclos correspondientes a la carga y descarga del dispositivo. Por lo tanto, la
teoría de fallo estático no es del todo satisfactoria para estudiar el comportamiento del
material. El estudio analítico nos ha permitido obtener la evolución de las tensiones
con la velocidad para distintos δ, pero no sabemos qué tipo de curva será más óptima
para la vida útil del eje, pues para cada valor de δ se tendrán distintos valores de la
tensión media y alterna. Para estudiar este fenómeno y poder calcular el ajuste óptimo,
se han escogido tres diseños basados en la geometría propuesta y en los que se han
tomado tres valores de δ correspondientes a los límites previstos para dicho parámetro,
pasando por un valor intermedio. A partir de estos tres diseños, se analizarán sus
2 Diseño del rotor
108
respuestas a los fenómenos de fatiga
y se obtendrá el valor óptimo del
ajuste δ. El método empleado para
cuantificar cual de los tres diseños es
más
resistente
a
fatiga
es
la
aplicación de la teoría del daño
acumulativo
de
Palgrem-Miner.
Mediante esta teoría se deduce cual
de las tres evoluciones temporales de
la tensión, correspondientes a cada
Interferencia δ [µm]
200
300
400
450
500
600
Color de la curva
azul
verde
azul claro
rojo
lila
amarillo
Figura 2.24: Evolución de la tensión equivalente en el eje para
la geometría propuesta con distintos ajustes δ barriendo todo el
intervalo considerado.
uno de los tres ajustes propuestos
(diseños A, B o C, Tabla 2.19), es más
dañina para el material. El óptimo
estará en aquel diseño que resulte
menos dañado tras su operación en
diez
años
con
las
condiciones
descritas.
Antes de exponer con detalle el procedimiento de cálculo, se van a presentar los
diagramas propios del material. Se trabajará con la curva S-N en su representación
logarímica y con los diagramas de Haigh y Goodman.
2.6.2
Diagramas del Al 7475-T651 para el análisis de fatiga.
A continuación se presentan los diagramas de interés del Al 7475-T651 y se comenta
el procedimiento de cálculo utilizado para la optimización de la fatiga del material. El
desarrollo de estos diagramas está motivado por la necesidad de cuantificar los
fenómenos de fatiga cuando las tensiones no son alternantes puras. El método
empleado es aplicable a materiales dúctiles y nos permite estimar la vida del
componente a partir de los valores de su resistencia a tracción Su, a fluencia Sy y a
fatiga Sf´, para un número determinado de ciclos de trabajo caracterizados por su valor
medio y alternante. Este método ha probado ajustarse bastante bien a los datos
2 Diseño del rotor
109
experimentales y está muy ligeramente por debajo de la dispersión de los puntos de
datos. La gran ventaja que supone respecto a las curvas S-N es que proporciona un
área de trabajo dentro de la cual el diseño se considera seguro para múltiples
combinaciones esfuerzos medios y alternos. Para su construcción se grafican en un
plano σm-σa varias relaciones que suponen modelos matemáticos para la envolvente de
los datos experimentales en la zona de tracción media (valores positivos de σm). Los
tres criterios más utilizados se presentan en la Figura 2.25.
σa [MPa]
1.4 µ 108
Zona de
rotura
1.2 µ 108
Línea de Godman
1.0 µ 108
Línea de Gerber
8.0 µ 107
σa
S ′f
+
σm
S ut
=1
σa σm
S ′f
2
+ = 1
Sut
6.0 µ 107
Zona de
supervivencia
4.0 µ 107
Línea de Sodeberg
2.0 µ 107
σa
S ′f
+
σm
S yt
=1
0
0
1 µ 108 2 µ 108 3 µ 108 4 µ 108 5 µ 108
σm [MPa]
Figura 2.25: Criterios para el estudio de la fatiga con tensiones medias distintas de cero.
El punto de corte con el eje de abcisas es la tensión de fluencia Sy en la línea de
Sodeberg. En el caso de Gerber y Godman el punto de corte es la tensión de rotura Su.
Esto indica que los criterios de Gerber y Goodman no consideran fallo la fluencia del
material, sino exclusivamente la rotura. Para evitar que el material fluya, se corrige la
línea de Godman con la línea de rendimiento, que es aquella que corta ambos ejes por
la tensión de fluencia. El punto de corte con el eje de ordenadas será en todo caso el
límite de fatiga Sf´ (Se emplea el límite de fatiga modificado Sf´ que se calculó en el
epígrafe 2.3.2.3, pág. 65 del presente capítulo).
2 Diseño del rotor
110
Se hace notar que la relación de Goodman se considera un poco conservadora y la
de Sodeberg moderadamente. Sin embargo, la parábola de Gerber se ajusta bastante
bien a los puntos experimentales. En el análisis que sigue se utilizará el criterio de
Goodman modificado en la parte de tracción para evitar fallos por fluencia.
Para modelar los fallos en la parte de compresión se emplea la recta simétrica de la
línea de rendimiento con respecto al eje de ordenadas y la paralela al eje de abcisas por
el límite de fatiga Sf´. El diagrama obtenido para el Al 7475-T651 para N=107 ciclos,
llamado diagrama de Haigh, se presenta en la Figura 2.26.
Diagramas de Haigh del Al 7475-T651 para N={105-107 -5 108 } ciclos
σa [Pa]
Amplitud @PaD
1.5 µ 108
1.0 µ 108
5.0 µ 107
0
- 4 µ 108 - 2 µ 108
0
2 µ 108
4 µ 108
Tensión media @PaD
Figura 2.26: Diagrama de Haigh del Al 7475-T651 para distintas vidas.
Se puede observar que el diagrama no es simétrico, presentando mayor área en la
zona de tensiones medias de compresión. Además, para un amplio intervalo de
tensiones medias negativas no se observa reducción en la amplitud de las oscilaciones.
Este hecho es de suma importancia, pues nos indica que el material soporta mejor las
oscilaciones de tensión cuando presentan un valor medio nulo o de compresión. A
partir de cierto valor de la tensión media de compresión podemos observar una
reducción importante de las amplitudes. Sin embargo, esta reducción es inmediata
2 Diseño del rotor
111
cuando existen valores medios de tensión. Este fenómeno se debe a la naturaleza de la
mecánica de la fractura de la grieta, que tiende a propagarse más rápido con tracciones
que bajo compresión.
Se observa un aumento considerable de área al construir el diagrama para límites de
fatiga menores ( N=105 ciclos) que el definido como referencia (N=107ciclos)
y
viceversa (N=5 108), aunque la reducción es menor debido a la menor pendiente de la
curva SN en su último tramo. El contorno de los diagramas de Haigh representa a
todos los estados tensionales equivalentes en cuanto a duración, lo que nos permite
obtener una tensión alternante pura equivalente a cualquier tensión oscilante buscando
el punto de corte de su diagrama correspondiente con el eje de ordenadas. Trasladando
esta tensión alterna equivalente a la curva SN obtendremos el número de ciclos de vida
correspondiente para dicha solicitación.
Otra forma de presentar la misma información es mediante el diagrama de
Goodman (Figura 2.27), en el que se ha sustituido la tensión alterna en el eje de
ordenadas por la tensión total y se ha hecho un cambio de coordenadas. Se trabajará
sobre el diagrama de Haigh por su sencillez, pero es interesante esta última
representación.
Tensión @PaD
4 µ 108
2 µ 108
Tension media @PaD
0
- 2 µ 108
- 4 µ 108
- 4 µ 108 - 2 µ 108
0
2 µ 108
4 µ 108
DIAGRAMA DE GOODMAN DEL AL 7475-T651 PARA VIDA DE N=10^7 CICLOS
Figura 2.27: Diagrama de Goodman para el Al 7475-T651. Fuente: elaboración propia.
2 Diseño del rotor
112
En la figura anterior se han representado dos diagramas superpuestos. El de mayor
área corresponde al límite de fatiga de las probetas ensayadas ( Sf = 241 MPa).
Aplicando los coeficientes de modificación de la vida a fatiga se obtiene el límite de
fatiga para el eje, que se sitúa en Sf´ = 144 MPa y cuyo diagrama corresponde a la línea
cerrada de color azul oscuro. La zona de supervivencia para N= 107 ciclos se sitúa en su
interior. Para situar un esfuerzo alterno en el diagrama, entramos en el eje de abcisas
con el valor de la tensión media σm y a continuación nos desplazaremos verticalmente
hasta alcanzar la línea a trazos. Las tensiones que no producirán rotura para N ciclos
serán todas aquellas cuyos valores alternos no sobrepasen los límites de diagrama
oscilando a partir del punto de tensión media obtenido. Se ha representado a modo de
ejemplo una tensión alternante con valor medio de -100 MPa oscilando con la amplitud
máxima posible para supervivencia en N ciclos. Se comprueba que es completamente
equivalente a una alterna pura de la misma amplitud.
La curva SN que se presentó en el epígrafe 2.3.2.2 (Figura 2.9), al definir el material,
representa el comportamiento a fatiga de la probeta de Al 7475-T651 en el ensayo de
fatiga con la máquina de Moore. Sin embargo, y como se expuso en el epígrafe 2.3.2.3,
pág. 65, es necesario aplicar ciertos coeficientes de reducción al límite de fatiga que
presentaba dicha curva con el fin de obtener de forma más realista el comportamiento a
fatiga de la pieza. Además, se ha modificado la curva original de forma que se
obtengan tramos rectos en su representación logarítmica. Esta simplificación supone
poca variación con respecto a la curva experimental y añade un pequeño margen de
seguridad y claridad a los cálculos y al análisis, pues permite distinguir claramente las
zonas de bajo y alto ciclaje, y la zona de vida infinita (realmente no existirá dicha zona
ya que la curva SN del aluminio no presenta la asíntota horizontal característica de los
aceros. Hecha esta aclaración, nos referiremos al último tramo de la curva como se ha
indicado, pues a pesar de no tener límite real de fatiga, si existe una zona en la que el
material cambia su comportamiento notablemente. En la Figura 2.28 se puede observar
la curva experimental (curva roja continua) y su aproximación lineal (en representación
logarítmica), así como la curva aproximada con la reducción del límite de fatiga
Sf´(curva azul), que será la que emplearemos en los cálculos que siguen.
2 Diseño del rotor
113
Curva S-N aproximada del Al 7475-T651 con modificación del límite de fatiga
σa [Pa]
5.0 µ 108
3.0 µ 108
2.0 µ 108
1.5 µ 108
1
100
104
106
108
Se puede apreciar en color rojo la curva experimental correspondiente al ensayo de la probeta con la máquina de
Moore. En color rojo discontinuo se representa la curva aproximada que incorpora un margen de seguridad, pues es
más conservadora que la primera. Ambas presentan un límite a fatiga para N=107 ciclos de unos 244 MPa. El punto
de corte con el eje de ordenadas de sitúa en el valor de la fluencia del material Sy=510 MPa. En el primer codo de la
curva experimental se sitúa aproximadamente en un 85 % del valor de Sy. La curva azul se ha obtenido aplicando los
procedimientos clásicos de reducción de la vida a fatiga para duración finita y será la curva de trabajo. Se puede
apreciar un límite de fatiga modificado de unos 145 MPa para N=107 ciclos, que corresponde a la aplicación del
coeficiente reductor K=0.596 calculado anteriormente sobre el mismo punto de la curva experimental.
Figura 2.28: Curva S-N aproximada del Al 7475-T651 con modificación del límite de fatiga
2.6.3 Modelado del historial de carga. Tensiones alternas equivalentes
El procedimiento de cálculo seguido parte del análisis del número de ciclos que
recorrerá el componente a lo largo de su vida útil. Se distinguen dos tipos de ciclos, de
pequeña y de gran amplitud. Los primeros corresponden a las oscilaciones de tensión
que ocurren durante el funcionamiento normal del sistema, es decir, cuando éste opera
entre wmin=wmax/2 y wmax. Los ciclos de gran amplitud son aquellos que se recorrerán
al conectar y desconectar el sistema, luego corresponderán a las variaciones de tensión
2 Diseño del rotor
114
que se dan desde w0 a wmax. Se ha estimado que el número de ciclos de carga-descarga
en operación normal será de aproximadamente 700.000. Para estimar el número de
ciclos de arranque y parada, se ha supuesto que el sistema opera a diario durante diez
años y se conecta dos veces al día. Esto supondría un número de 7300 ciclos. Para
trabajar con números redondos y añadir un pequeño margen de seguridad, se ha fijado
el número de ciclos de trabajo en nm=104 y nM=106 para los ciclos de pequeña y gran
amplitud respectivamente. El paso siguiente ha sido caracterizar cada tensión oscilante
con su valor medio y alterno. Se prescinde de la forma de la onda ya que los
fenómenos de fatiga en materiales dúctiles solo dependen de los valores extremos de la
tensión y no de la forma en que se llega a ellos. Además, el valor medio de la onda no
se acoge a la definición matemática, sino que es simplemente la semisuma de los
valores extremos. Los ciclos de esfuerzo serán síncronos entre sí, pues ambos dependen
de la evolución temporal de w. Este hecho no modifica el procedimiento de análisis en
absoluto, pues la teoría no considera los posibles desfases entre ciclos. Esto se debe a
que la síncronía de los ciclos supone la peor situación posible para el material, pues se
alcanzan los máximos simultáneamente, y cualquier posible desfase no hace sino
añadir un margen de seguridad adicional al diseño.
Una vez caracterizados los ciclos de tensión radial y circunferencial con sus valores
medios y alternos, se debe pasar del estado biaxial a un estado uniaxial equivalente.
Este paso se realizará mediante el esfuerzo equivalente de Von Mises con signo (1).
Obtendremos un esfuerzo medio equivalente a partir de los valores medios de las dos
tensiones y procederemos de forma análoga con las amplitudes. De esta manera
obtendremos una tensión oscilante equivalente
σeqvVM = σr 2 +σθ 2 −σrσθ
σ r + σθ > 0 ⇒σ eqvVMs = σ eqvVM
σ r + σθ < 0 ⇒ σ eqvVMs = −σ eqvVM
(1)
A partir de dicha tensión con valor medio y amplitud, pasaremos a una tensión
alterna pura equivalente en duración con ayuda de los diagramas de Haigh o de
Goodman del material. Esta tensión alterna pura se llevará a la curva S-N para
cuantificar el número de ciclos de vida que le corresponden. De esta manera,
2 Diseño del rotor
115
obtendremos para cada uno de los tres diseños propuestos dos tensiones oscilantes
(cada una de las cuales repetida nm y nM veces) con sus respectivas estimaciones de vida
Nm y NM. En este punto, será necesario evaluar el daño acumulativo. Para ello, se debe
ponderar el efecto que tendrá cada uno de ciclos en la vida a fatiga de la pieza. El
planteamiento es el siguiente. Supongamos que el historial de tensiones dado en la
pieza se puede dividir en dos bloques correspondientes a dos tipos de ciclos, m y M
(los que hemos denominado de mayor y menor amplitud). Cada uno de los bloques
estará caracterizado por un número determinado de oscilaciones, por una amplitud y
por un valor medio. Ahora bien, si determinamos la tensión equivalente alterna pura
que corresponde a la tensión pulsante de cada bloque, el historial de tensión se reduce
a dos tensiones alternas puras que se repetirán nm y nM veces y que tendrán amplitudes
σam y σaM. Si ahora llevamos los valores de dichas amplitudes a la curva S-N del
material, obtendremos el número de ciclos hasta el fallo para la aplicación de cada
tensión de forma independiente.
2.6.4
Daño Acumulativo. Duración con vida finita
Llamemos wi al daño parcial que ocurre en la pieza resultado de aplicar el bloque i
de ciclos de tensión, y W al daño total de la pieza en el momento de la rotura.
Suponiendo unas leyes lineales de daño acumulativo podremos predecir la rotura de la
pieza cuando:
W =
∑w
i = A, B
Bloque1
Bloque2
Tensión alterna
equivalente
σam
σaM
i
Nº ciclos que se
aplica
nm
nM
Nº ciclos de vida
Daños parciales
Nm
NM
wm
wM
Tabla 2.20: Símbolos para los parámetros que caracterizan los dos tipos de ciclos de tensión que solicitan el material
del eje.
Si consideramos que la pieza sometida a la tensión alterna σai falla en Ni ciclos, el
daño producido en ni ciclos será:
2 Diseño del rotor
116
ni wi
=
Ni W
Por lo tanto, el daño acumulado con i ciclos que se repiten ni veces será el término
derecho de la siguiente inecuación (2) y debe ser menor que la unidad para asegurar la
supervivencia de la pieza.
i
nn
k =1 N n
(2)
1> ∑
Si además consideramos que la pieza rompe en N ciclos y los ciclos se producen en
una secuencia en la cual la proporción del número total de ciclos a cada nivel de
tensión es fija podremos escribir para el caso que nos atañe:
N = nm′ + n′M
nm
nm + nM
nm′ =αmN
nM
nm + nM
n′M =αM N
αm =
αM =
y podemos obtener el número total de ciclos N a que se puede someter la pieza sin
fallo a partir de la expresión:
αm N
Nm
+
αM N
NM
=1⇒ N =
Nm NM
αm NM + αM Nm
Debe tenerse presente que este método de cálculo no considera la secuencia en que
se aplican las cargas. El recuento de los ciclos no tiene en cuenta como se producen y
solo se considera el número total de ellos en cada nivel de tensión. Sin embargo, este
hecho no modifica la validez de este estudio, pues todos los diseños se comparan
asumiendo que trabajan con la misma secuencia de ciclos en los que únicamente varían
los valores medios. Por lo tanto, de alguna manera estamos sorteando las posibles
deficiencias de este método.
2 Diseño del rotor
117
2.6.5 Elección del valor de ajuste. Estudio comparativo
A continuación se establece una comparativa entre las tensiones alternas
equivalentes que se originan en el eje para cado uno de los tres ajustes propuestos en
la Tabla 2.19.
Se observa que en todos los diseños se obtienen los mismos valores de la tensión
radial alternante, lo cual era de esperar, pues dicha tensión es función exclusiva de la
carga rotacional de los imanes y por tanto de la velocidad angular. Sin embargo, a
pesar de que las amplitudes de los ciclos de tensión circunferencial son iguales para las
tres opciones, varían sus valores medios. Se observa que en los casos B y C el ajuste δ
proporciona una compresión suficiente para que la contribución de los valores medios
de las tensiones acimutales a la tensión equivalente media de Von Mises de como
resultado un valor negativo. Podría calcularse el umbral inferior de ajuste que nos
proporcione esta situación, aunque trabajar cerca del umbral podría ser peligroso, pues
este análisis no puede garantizar demasiada precisión. A partir de dicho umbral de
ajuste que nos permita trabajar en la zona de compresión del diagrama con cierto
margen de seguridad para asegurar dicha posición, todos los diseños serán
equivalentes desde el punto de vista de fatiga, siempre que la tensión media no supere
el valor Sy-Se = 366 MPa a partir del cual la amplitud se verá reducida para evitar la
fluencia del material.
Los resultados obtenidos en este estudio se presentan en las tres páginas que siguen.
2 Diseño del rotor
118
Modelo A
Ciclos
menores
nm = 104
Ciclos
mayores
nM = 106
δ=200 [µm], rf=185 [mm], tesiones en MPa
σmin
σmax
∆σ
σm
σa
σr
-76.96
-19.24
57.72
-48.10
28.86
σθ
-8.00
203.08
211.08
97.54
105.54
σr
-76.96
0.00
76.96
-38.48
38.48
σθ
-78.38
203.08
281.46
62.35
140.73
σmVM
σaVM
σaeqv
128.53
122.54
156.58
88.13
125.98
148.28
Tensión [Pa]
2.5 µ 108
2.0 µ 108
1.5 µ 108
1.0 µ 108
5.0 µ 107
0
- 5.0 µ 107
0
2000 4000 6000 8000 10 000 12 000
w [rpm]
Tensiones [Pa] vs w [rpm]
σeqvVM
σr
σθ
Diagramas de Haigh
σMVM
NM=1.737 106
σmVM
Nm=1.807105
Amplitud @PaD
1.5 µ 108
1.0 µ 108
5.0 µ 107
0
- 4 µ 108 - 2 µ 108
0
2 µ 108
Tensión media @PaD
Figura 2.29: Estudio de fatiga para el ajuste A
4 µ 108
Curva
azul
verde
roja
2 Diseño del rotor
119
Modelo B
Ciclos menores
nm = 104
Ciclos mayores
nM = 106
δ=450 [µm], rf=185 [mm], Tensiones en MPa
σmin
σmax
∆σ
σm
σa
σr
-76.96
-19.24
57.72
-48.10
28.86
σθ
-105.96
105.12
211.08
-0.42
105.54
σr
-76.96
0.00
76.96
-38.48
38.48
σθ
-176.33
105.12
281.45
-35.60
140.72
σmVM
σaVM
σaeqv
-47.89
94.47
94.47
-37.12
125.97
125.97
Tensión [Pa]
1.5 µ 108
1.0 µ 108
5.0 µ 107
0
- 5.0 µ 107
- 1.0 µ 108
- 1.5 µ 108
0
2000 4000 6000 8000 10 000 12 000
w [rpm]
Tensiones [Pa] vs w [rpm]
σeqvVM
σr
σθ
Diagramas de Haigh
σMCM
σmVM
Amplitud @PaD
1.4 µ 108
1.2 µ 108
1.0 µ 108
8.0 µ 107
6.0 µ 107
4.0 µ 107
2.0 µ 107
0
- 4 µ 108 - 2 µ 108
0
2 µ 108
Tensión media @PaD
Figura 2.30: Estudio de fatiga para el ajuste B
4 µ 108
Curva
azul
verde
roja
2 Diseño del rotor
120
Modelo C
Ciclos menores
nm=104
Ciclos mayores
nM=106
δ=650 [µm], rf=185 [mm], Tensiones en MPa
σmin
σmax
∆σ
σm
σa
σr
-76.96
-19.24
57.72
-48.10
28.86
σθ
-184.33
26.75
211.08
-78.79
105.54
σr
-76.96
0.00
76.96
-38.48
38.48
σθ
-254.69
26.75
281.44
-113.97
140.72
σmVM
σaVM
σaeqv
-68.78
94.47
94.47
-100.42
125.97
125.97
Tensiones [Pa]
2 µ 108
1 µ 108
0
- 1 µ 108
- 2 µ 108
0
2000 4000 6000 8000 10 000 12 000
w [rpm]
Tensiones [Pa] vs w [rpm]
σeqvVM
σr
σθ
Diagramas de Haigh
σMCM
σmVM
Amplitud @PaD
1.4 µ 108
1.2 µ 108
1.0 µ 108
8.0 µ 107
6.0 µ 107
4.0 µ 107
2.0 µ 107
0
- 4 µ 108 - 2 µ 108
0
2 µ 108
Tensión media @PaD
Figura 2.31: Estudio de fatiga para el ajuste C
4 µ 108
Curva
azul
verde
roja
2 Diseño del rotor
121
En la Figura 2.32 se muestran los puntos de trabajo de cada uno de los ciclos
equivalentes de tensión correspondientes a cada valor de ajuste δ obtenidos en este
estudio.
N=107 ciclos
Amplitud @PaD
1.4 µ 108
1.2 µ 108
1.0 µ 108
8.0 µ 107
6.0 µ 107
4.0 µ 107
2.0 µ 107
0
- 4 µ 108 - 2 µ 108
0
2 µ 108
4 µ 108
Tensión media @PaD
Puntos
Diseño
δ [µm]
Rojos
A
200/0.54D10-3
Verdes
B
450/1.22D10-3
Azules
C
600/1.76D10-3
Figura 2.32: Situación de los estados tensionales equivalentes para cada valor de ajuste contemplado. Cada diseño da
lugar a dos puntos, el correspondiente a los ciclos de gran y de pequeña amplitud que hemos definido anteriormente.
En el diseño A los puntos se sitúan fuera del diagrama, lo que nos indica que se
encuentran en una situación más desfavorable que en el caso de los diseños B y C,
cuyos puntos de trabajo son equivalentes en duración por presentar los mismos valores
alternos y estar en la zona de compresión. Sin embargo, debe tenerse presente que
incluso el diseño A podría ser aceptable si tenemos en cuenta lo siguiente. Cada diseño
supone un estado biaxial de tensiones y dos tipos de ciclos distintos, los de mayor y
menor amplitud. Para cada tipo de ciclo se ha calculado una tensión alterna
equivalente en duración. Por lo tanto, cada diseño está sometido a dos tensiones
equivalentes alternantes que se repetirán nm y nM veces. Sin embargo, tanto nm como
nM son bastante menores que el número de ciclos N=107 para el cual se ha construido el
diagrama de Haigh. El hecho de que los puntos del diseño A se encuentren fuera de los
límites del gráfico significa que en el supuesto de que sometiéramos la pieza
2 Diseño del rotor
122
exclusivamente a uno de los dos tipos de ciclo de tensiones, el fallo se produciría antes
de los N=107 ciclos. Sin embargo, como se ha dicho, ninguno de los dos tipos de ciclo se
repetirán tal número de veces, por lo que en ausencia de un estudio de daño
acumulativo no podremos saber si el diseño es o no aceptable, aunque si sabemos que
no es óptimo. Hecha esta aclaración conceptual, debemos remarcar que nuestro
objetivo por el momento no es evaluar la duración de cada diseño, sino analizar desde
un punto de vista cualitativo cuál de ellos es preferible, algo que ya se ha podido
evidenciar tras el análisis de los diagramas de Haigh.
Se concluye proponiendo el diseño B como óptimo, pues presenta una compresión
con un margen suficiente para garantizar que trabajará a la izquierda del eje de
ordenadas y su menor valor del ajuste con respecto a C facilitará el montaje.
El cálculo del margen de seguridad, del daño acumulativo y de la duración
esperable para la pieza se concretará sobre el diseño definitivo con elementos finitos,
empleando las curvas simuladas en lugar de las obtenidas analíticamente.
2.7 Diseño definitivo; cálculo con elementos finitos y contraste de
resultados.
2.7.1 Introducción
Partiendo de los resultados obtenidos en los estudios precedentes, se dispone de un
punto de partida excelente para realizar el modelo con elementos finitos y refinar
aquellos puntos del diseño que sean susceptibles de mejora. Dicho modelo prescinde
de la sencillez empleada en el modelo analítico e incorpora las piezas que no se han
tenido en cuenta en él. Se incorporan las armaduras de los cojinetes magnéticos y los
anillos de fibra de vidrio para su fijación. Los imanes permanentes se han acortado,
ocupando ahora tan solo la mitad del área interior al eje. De esta manera se dispone de
espacio suficiente en los extremos del eje para poder instalar el sistema de guiado.
2 Diseño del rotor
123
A partir del modelo de EF, se obtendrán las tensiones y los desplazamientos en
todos los puntos del rotor y se estudiará su evolución con la velocidad. Con el fin de
validar el estudio analítico desarrollado hasta este punto, se propone un contraste de
resultados entre ambos enfoques, numérico y analítico. Al final del capítulo, y
empleando las curvas simuladas con EF, retomaremos el estudio de fatiga y
realizaremos una evaluación del daño acumulativo y de los márgenes de seguridad del
diseño, y se calculará su duración esperable. Los valores de los parámetros del diseño
definitivo obtenidos se muestran en la Tabla 2.21
M
Masa total del rotor
309.75
kg
J
Inercia total del rotor
20.52
kg m2
Emax
Energía máxima almacenable
20
MJ
Eu
Energía máxima disponible
15
MJ
wmin
Mínima velocidad de operación
6666.5/698
rpm/rad/s2
wmax
Máxima velocidad de operación
13333/1396
rpm/rad/s2
rn
Radio interno de los imanes
145
mm
ri
Radio interno del eje del rotor
180
mm
rf
Radio externo del eje del rotor
185
mm
ro
Radio externo del volante
375
mm
L
Longitud vertical del rotor
380
mm
δ
Interferencia de zunchado
450/1.22 x 2 x rf x10-3
µm
Tabla 2.21: Diseño definitivo. Parámetros del rotor
Materiales
Al-7475-T7351
FC T300/2500
Fibra de V.
Scotch/Epoxi
Acero
4130
Tensiones máximas de diseño
Smax tracción L
STL
250
600
354
1150
MPa
Smax comp. L
SCL
250
465
205
1150
MPa
Smax tracción T
STT
250
40
16
1150
MPa
Smax comp. T
Límite de fatiga
corregido
Coef. de seguridad
Límite de fatiga
admisible
SCT
250
144
N=107
1.5
97
N=107
85
60
MPa
-
-
-
-
1150
555
N=∞
-
-
-
S f´
n
Sfa
MPa
MPa
Tabla 2.22: Tensiones máximas de trabajo de los materiales del rotor.
Los márgenes de trabajo de los materiales incluyendo sus respectivos coeficientes de
seguridad se exponen en la Tabla 2.22. Se incorpora un coeficiente de seguridad de 1.5
al límite de fatiga corregido Sf.
2 Diseño del rotor
124
Este es el aspecto que presenta el diseño final del rotor. Se ha representado el valor
de la tensión radial a máxima velocidad en Pa.
Armadura
C. Axial
Acero 4130
Fibra de
carbono
T300/2500
Acero 4130
Armadura
C. Radial
Laminado
compuesto
Fibra de vidrio
Scotch/Epoxi
Eje
Aluminio
7475-T651
Figura 2.33: Diseño definitivo del rotor.
Para el modelo de EF se han empleado más de 27000 nodos y cerca de 9000
elementos de dos tipos diferentes. El elemento estructural utilizado es el PLANE 82. Es
un elemento plano de orden superior que permite realizar modelos estructurales
planos y axisimétricos. Dispone de 8 nodos con dos grados de libertad por nodo,
desplazamiento radial y axial en el caso axisimétrico. Para modelar las uniones entre
las diferentes piezas del rotor se ha empleado el elemento de contacto CONTAC 52.
Representa la unión entre dos superficies y es no lineal por lo que se recurre a procesos
iterativos para el cálculo de la solución. Permite modelar ajustes con interferencia. Los
materiales empleados se han modelado de la forma más realista posible. El composite
de fibra de carbono y el de fibra de vidrio se han modelado como materiales
anisótropos con sus respectivas matrices de elasticidad presentadas en el epígrafe 2.3.
El aluminio y el acero se han definido con sus tres constantes elásticas como es
2 Diseño del rotor
125
habitual. El acero laminado del cojinete radial se ha modelado como acero macizo
isótropo cuando realmente presenta tan solo isotropía transversal debido al laminado.
Sin embargo, dada la simetría polar del modelo y de las cargas, y la orientación del
laminado perpendicular al eje de rotación, se puede hacer esta aproximación sin perder
gran precisión ya que el cortante entre las láminas será despreciable.
2.7.2
Análisis del eje
A continuación se presentan los resultados correspondientes al eje del rotor. Se
comienza presentando la distribución de tensiones y desplazamientos en función del
radio en las situaciones límite de w0 y wmax. Posteriormente se analiza la evolución de
las mismas magnitudes con la velocidad angular para los puntos más esforzados del
material. Los resultados se presentan contrastados con los obtenidos a partir de las
fórmulas analíticas desarrolladas en el apartado 2.5.3. Se prestará especial atención a
los puntos singulares en los que se presenten concentraciones de tensiones para la
evaluación de la fatiga.
2.7.2.1 Distribución de tensiones y desplazamientos.
2.7.2.1.1
Rotor en reposo ( w = w0 )
En esta situación no existirá pi(w) ni esfuerzos rotacionales, con lo que el único
esfuerzo provendrá del ajuste a presión entre el eje y el volante y por lo tanto será de
compresión. Sustituyendo los valores numéricos de la Tabla 2.21 en las expresiones de
σrAL y σθAL, resolviendo la ecuación (15) y particularizando la expresión obtenida en
w=0, obtenemos el valor de la presión de contacto pf = 4.8 [MPa]. Reintroduciendo este
valor en las expresiones de σrAL y σθAL se obtiene la distribución de esfuerzos con el
radio. Los desplazamientos se obtienen planteando la ley de Hooke (Ecs. 1 y 2, epígrafe
2.5.3) a partir de las expresiones de las tensiones previamente calculadas.
2 Diseño del rotor
126
Tensión radial σr / w0
Punto B
Sección A
Figura 2.34: Distribución de la tensión radial σr [MPa] en el eje a w0. (deformada x50)
Nota: La sección A la constituyen todos los puntos del plano ecuatorial del eje. Los puntos de menor radio de la
sección A (Se referirán simplemente como punto A) son los más solicitados de la pieza por lo que este estudio se
centrará en las tensiones y desplazamientos en dichos puntos. El punto B se sitúa en la superficie interna del eje a la
altura del zócalo sobre el que se ajustan los anillos de fibra de vidrio. Se analizará su estado tensional por ser un
potencial punto de concentración de tensiones.
ur(r) / w0 (Pto. A)
σr(r) / w0 (Pto. A)
ur [m]
σr [Pa]
0
- 0.000425
- 1 µ 106
- 0.000430
- 2 µ 106
- 3 µ 106
- 0.000435
- 4 µ 106
- 0.000440
0.180
0.181
0.182
0.183
0.184
0.185
0.180
0.181
radio[m]
0.182
0.183
0.184
radio[m]
Figura 2.35: Tensión y desplazamiento radial en función del radio en el plano ecuatorial del eje a w=0.
Tensión circunferencial σθ / w0
0.185
2 Diseño del rotor
127
Figura 2.36: Distribución de la tensión acimutal [Pa] en el eje a w0. (deformada x50)
Elementos finitos
Formulación analítica
discontinua negra
continua roja
σθ (r) / w0 (Pto. A)
σθ [Pa]
- 1.66 µ 108
- 1.68 µ 108
- 1.70 µ 108
- 1.72 µ 108
- 1.74 µ 108
- 1.76 µ 108
0.180
0.181
0.182
0.183
0.184
0.185
radio[m]
Figura 2.37: Tensión acimutal del eje en función del radio en la sección A a w0
Tensión equivalente Von Mises σeqv / w0
2 Diseño del rotor
128
Figura 2.38: Distribución de la tensión equivalente Von Mises [Pa] en el eje a w0. (deformada x50)
Elementos finitos
Formulación analítica
discontinua negra
continua roja
σeqv (r) / w0 (Pto. A)
σeqv [Pa]
1.76 µ 108
1.74 µ 108
1.72 µ 108
1.70 µ 108
1.68 µ 108
1.66 µ 108
1.64 µ 108
0.180
0.181
0.182
0.183
0.184
0.185
radio[m]
Figura 2.39: Tensión equivalente de Von Mises en función del radio en la sección A a w=0.
Detalle de tensiones y deformación (x50) en Pto. B
2 Diseño del rotor
129
σr / w0 (Pto. B)
σeqv / w0 (Pto. B)
Figura 2.40: Detalle de tensiones [Pa] y deformación en el punto B a w=0. (deformada x50).
2.7.2.1.2
Rotor a máxima velocidad ( w = wmax)
Tensión radial σr / wmax
Figura 2.41: Distribución de tensión radial [Pa] en el eje a wmax. (deformada x50)
2 Diseño del rotor
130
Elementos finitos
Formulación analítica
discontinua negra
continua roja
ur(r) / wmax (Pto. A)
σr(r) / wmax (Pto. A)
σr [Pa]
ur [m]
- 7.49 µ 107
0.00035
- 7.50 µ 107
0.00034
- 7.51 µ 107
0.00033
- 7.52 µ 107
0.00032
- 7.53 µ 107
0.00031
0.180
0.181
0.182
0.183
0.184
0.185
0.00030
0.180
0.181
radio[m]
0.182
0.183
radio[m]
Figura 2.42: Tensión y desplazamiento radial del eje en la sección A a wmax.
Tensión circunferencial σθ / wmax
Figura 2.43: Distribución de tensión acimutal [Pa] en el eje para wmax. (deformada x50)
0.184
0.185
2 Diseño del rotor
131
Elementos finitos
Formulación analítica
discontinua negra
continua roja
σθ (r) / wmax (Pto. A)
σeqv(r) / wmax (Pto. A)
σθ [Pa]
σeqv [Pa]
1.15 µ 108
1.65 µ 108
1.10 µ 108
1.60 µ 108
1.05 µ 108
1.55 µ 108
1.00 µ 108
1.50 µ 108
9.50 µ 107
0.180
0.181
0.182
radio[m]
0.183
0.184
1.45 µ 108
0.185
0.180
0.181
0.182
0.183
0.184
radio[m]
Figura 2.44: Tensión acimutal y equivalente Von Mises en función del radio en la sección A para wmax
Tensión equivalente Von Mises σeqv / wmax
Figura 2.45: Distribución de tensión equivalente de Von Mises [Pa] en el eje para wmax (deformada x50)
0.185
2 Diseño del rotor
132
El análisis con elementos finitos arroja resultados muy parecidos a los que se
obtienen con la formulación analítica en el plano ecuatorial del eje (sección A). Sin
embargo, las diferencias entre ambos modelos conducen inevitablemente a un
desconocimiento de todo lo que ocurre fuera del plano ecuatorial del volante. Se han
analizado los puntos potencialmente esforzados con concentraciones de tensiones. El
punto B presenta una pequeña concentración local de tensión radial a rotor parado
debida al ajuste del anillo separador de fibra de vidrio con el eje. Sin embargo, esta
tensión no supone ningún problema para la resistencia del eje, pues su valor no es
elevado situándose por debajo de los 60 MPa. Además, esta tensión desaparece a
medida que el rotor aumenta su velocidad debido al efecto compensador de la inercia
que tiende a disminuir la fuerza de ajuste entre estos dos componentes. Por otro lado,
los esfuerzos más preocupantes, que son los acimutales, se mantienen en valores
razonables, menores que aquellos que aparecen en el punto A. Debe tenerse presente
que los imanes no actúan más que en la parte central del eje, con lo que cualquier
pequeña concentración de tensión que aparezca fuera de esta zona se ve compensada
por la ausencia del empuje radial de los imanes. Tras un estudio detallado de las
tensiones generadas en el modelo de EF se concluye que los puntos más esforzados del
material se sitúan en el plano ecuatorial del volante y en su radio interno. Por lo tanto,
la validez del diseño se justifica a partir del estudio de la tensión en dichos puntos.
Asimismo, las curvas para el dimensionamiento a fatiga de la pieza son las obtenidas
en la citada sección, pues se espera que sea la zona con mayor riesgo de aparición de
grietas.
2.7.2.2 Evolución de las tensiones y los desplazamientos con w
2.7.2.2.1
Desplazamiento radial ur y deformada ( x 50 )
2 Diseño del rotor
133
1
2
3
4
5
6
Figura 2.46: Evolución de la deformada y del desplazamiento radial [m] del eje con la velocidad de giro.
2 Diseño del rotor
134
ur(r) / wmax (Pto. A)
ur [m]
0.0002
0.0000
- 0.0002
- 0.0004
0
2000
4000
6000
8000 10000 12000
w [rpm]
Elementos finitos
Formulación analítica
discontinua negra
continua roja
Figura 2.47: Evolución del desplazamiento radial con la velocidad en el punto A del eje
Como se puede comprobar, los desplazamientos totales de la superficie interna del
eje barren una distancia poco inferior al milímetro, algo que afectará en alguna medida
al desempeño de la máquina eléctrica, sobre todo a alta velocidad por el gran
incremento del entrehierro. Sin embargo, la naturaleza de la máquina propuesta es la
que mejor se puede adaptar a este fenómeno. Al tratarse de una máquina síncrona de
imanes permanentes, se puede trabajar con un entrehierro elevado y por lo tanto la
máquina será menos sensible a las variaciones del mismo.
2 Diseño del rotor
2.7.2.2.2
135
Tensiones radial, acimutal y equivalente Von Mises
Tensión [Pa]
1.5 µ 108
1.0 µ 108
5.0 µ 107
0
- 5.0 µ 107
- 1.0 µ 108
- 1.5 µ 108
0
2000
4000
6000
8000
10000
12 000
w [rpm]
Analítico continua / discontinua EF
Tensión radial
Tensión circunferencial
Tensión equivalente VM
σr(r)
σθ(r)
σVM(r)
rojo
verde
azul
Figura 2.48: Evolución de la tensión radial, acimutal y equivalente Von Mises con w en la sección A del eje.
Como se puede comprobar a la vista de la comparativa de la Figura 2.48, si bien
el estudio analítico proporciona unos resultados bastante buenos para la distribución
radial de tensiones y desplazamientos en el eje, los resultados para la evolución de
dichas magnitudes con la velocidad es excelente, obteniéndose unos errores
despreciables, sobre todo para la tensión radial, cuya curva se superpone
completamente a la obtenida por simulación.
2.7.2.3 Margen de seguridad en duración. Vida a fatiga
En este punto se retoma el estudio de fatiga, basándose ahora en las curvas
simuladas con EF. A partir de ellas obtendremos las tensiones alternas equivalentes en
duración para los ciclos de mayor y menor amplitud. A continuación, se estimará la
vida del componente a partir de la teoría del daño acumulativo de Palgrem-Miner y se
determinará el margen de seguridad en duración definido como el cociente entre el
2 Diseño del rotor
136
número de ciclos que soporta el componente a un determinado nivel de tensión
oscilante y el número de ciclos que desarrollará a lo largo de su vida útil. Además, se
incorpora un coeficiente de seguridad n=1.5 en el diagrama de Haigh para asegurar la
robustez del diseño.
A partir de los cálculos con EF obtenemos los siguientes valores de tensión cíclica
para cada uno de los dos tipos ciclo que se habían definido, de pequeña y gran
amplitud.
Ciclos
menores
nm=104
Ciclos
mayores
nM=106
σmin
σmax
σm
σa
σr
-75
-18.77
-46.89
28.11
σθ
-98.81
115.603
8.10
107.21
σr
-75
0
-37.5
37.5
σθ -170.315 115.603 -27.36 142.95
σmVM
σaVM
σaeqv
Ni
-51.42
96.28
96.28
1.576x107
-33.6
128.37
128.37
8.5x104
Tabla 2.23: Caracterización de las tensiones oscilantes para el cálculo de la vida a fatiga del eje obtenidos con EF.
Valores en MPa.
Con
coeficiente
de
seguridad aplicado n=1.5, el
1.4 µ 108
1.2 µ 108
Am plitud @P aD
el
límite de fatiga para N=107
1.0 µ 108
8.0 µ 107
ciclos desciende a un valor de
6.0 µ 107
4.0 µ 107
en el plano σm-σa el nuevo
2.0 µ 107
Se observa una importante
96.7 MPa. Se ha representado
diagrama junto con el antiguo.
0
- 4 µ 108 - 2 µ 108
0
2 µ 108
4 µ 108
Tensión media @PaD
Figura 2.49: Diagramas de Haigh del Al7475-T651. En azul se
reducción del área a lo largo de
todo el perímetro del gráfico.
La modificación del diagrama
representa el gráfico resultante de aplicar el coeficiente de seguridad
con el coeficiente aplicado da
n. Los puntos representan las tensiones oscilantes.
como resultado un diagrama
homotético de razón 1/n.
Si el lector recapitula al apartado 2.6.2 ( Figura 2.26, pág.110) se preguntará por qué
ahora se ha transformado el diagrama con una homotecia y no se ha reducido
simplemente el límite de fatiga al nuevo valor y se han mantenido los puntos de corte
2 Diseño del rotor
137
de la línea de Goodman con el eje de abcisas como se hizo entonces. La respuesta es
que entonces lo que se hizo fue aplicar un coeficiente K cuyo objeto era adaptar la
curva empírica S-N de la probeta ensayada a aquella que se supone que muestra la
pieza en cuestión y que está afectada por sus dimensiones, circunstancias y forma en
que trabaja. Esta reducción por tanto afecta la resistencia de la pieza en el caso de que
trabaje un elevado número de ciclos, es decir, la reducción de la resistencia mecánica
solo se hace patente cuando la pieza trabaja a fatiga. Por lo tanto, el coeficiente K no
afecta a la resistencia última a tracción ni a fluencia del material. Por el contrario, el
coeficiente n supone un margen de seguridad global para todos los estados últimos del
material, y esa es la razón de la transformación homotética.
Retomando el estudio de fatiga de la Figura 2.49, se observa que la amplitud de los
ciclos menores (punto verde) está muy levemente por debajo del límite de fatiga (del
nuevo límite de fatiga resultado de aplicar K y n), por lo que su vida será ligeramente
superior a N=107 ciclos. Como ambos puntos están en la zona de compresión, su
tensión
5. µ 108
4.5 µ 108
4. µ 108
3.5 µ 108
3. µ 108
alterna
equivalente
duración
será
simplemente
2.5 µ 108
en
el
valor alternante de
100.
1000.
10000. 100 000. 1. µ 106 1. µ 107 1. µ 108
la tensión. Entrando
en
la
curva
SN
modificada con el
nuevo coeficiente n
(nótese
Figura 2.50: Curvas S-N del Al 7475-T651 con la aplicación sucesiva de K y n. La
tensión oscilante está dada en [Pa] y en el eje de abcisas representa N.
que
la
modificación de la
curva
también
es
diferente a la que se hizo al aplicar K), se obtiene la vida esperada para dicha tensión
oscilante equivalente. Procediendo del mismo modo obtenemos la vida para la tensión
equivalente de los ciclos de mayor amplitud. En la Figura 2.50 se presenta la nueva
curva SN junto con la que se obtuvo aplicando los coeficientes de trabajo para la pieza
y la curva aproximada de la experimental en trazo discontinuo.
2 Diseño del rotor
138
3. µ 108
2.5 µ 108
2. µ 108
1.5 µ 108
100.
1000. 10000. 100000. 1. µ 106 1. µ 107 1. µ 108
Figura 2.51: Curva S-N de trabajo a partir de la que se han obtenido las esperanzas de vida para cada tensión. Pa
frente a número de ciclos N.
A partir de la teoría del daño acumulativo de Palgrem–Miner obtenemos los daños
parciales asociados a cada ciclo a partir del cociente entre el número de ciclos que se
espera que se repita la tensión oscilante y la vida asociada a dicha tensión.
wi =
ni
Ni
Para que la pieza no falle se debe cumplir que:
i
nn
k =1 N n
1> ∑
A partir de los valores calculados con EF (Tabla 2.23) se obtiene un valor de 0.1811
para el lado derecho de la inecuación, lo que indica que estamos bastante alejados del
fallo. Teniendo en cuenta que la proporción de ciclos de cada tipo se mantiene
constante se puede evaluar el margen de vida hasta la rotura a partir de la expresión
siguiente:
αm N
Nm
+
αM N
NM
=1⇒ N =
Nm NM
αm NM + αM Nm
2 Diseño del rotor
139
Donde recordemos que αm y αM representan las proporciones de ciclos al total de
cada tipo. Se obtiene un valor del número de ciclos hasta la rotura de N=5.58 106, lo
que supone que el dispositivo puede trabajar en el régimen considerado y bajo el
coeficiente de seguridad establecido más de cinco veces y media su vida asignada. La
forma de cuantificar este margen de trabajo es mediante el coeficiente MS denominado
margen de seguridad en duración:
MS =
N asignado
N límite
= 5.58
2.7.3 Análisis del volante
2.7.3.1 Distribución de tensiones y desplazamientos
2.7.3.1.1
Rotor en reposo ( w = w0 )
Tensión radial σr / w0
Punto A
Figura 2.52: Distribución de tensión radial [Pa] en el composite de FC a w0 (deformada x50).
2 Diseño del rotor
140
Se comprueba que las tensiones en el composite de fibra de carbono no superan en
ningún caso los valores máximos de diseño expuestos en la Tabla 2.13, pág. 75.
σr(r) / w0 (Pto. A)
σr [Pa]
0.25
0.30
0.35
- 1 µ 106
- 2 µ 106
- 3 µ 106
- 4 µ 106
radio [rpm]
analítico continua/EF discontinua
Figura 2.53: Tensión radial del volante [Pa] en función del radio en el punto A a w0 y detalle del ajuste con la FV.
ur(r) / w0 (Pto. A)
ur [m]
0.000025
0.00002
0.000015
0.25
0.30
0.35
5. µ 10-6
radio [m]
analítico continua/EF discontinua
Figura 2.54: Desplazamiento radial en el plano ecuatorial a w0
2 Diseño del rotor
141
Se puede observar que la aproximación realizada para modelar la FC como material isótropo no arroja buenos
resultados a la hora de obtener las distribuciones de desplazamientos por lo que el MEF es la única solución para
obtener resultados precisos.
Tensión circunferencial σθ (r) / w0
Figura 2.55: Distribución de tensión acimutal [Pa] en el composite a w0 (deformada x50).
Tensión circunferencial σθ (r) / w0
σθ [Pa]
1.5 µ 107
1.0 µ 107
5.0 µ 106
0.25
0.30
0.35
radio [m]
Elementos finitos
Formulación analítica
discontinua negra
continua roja
Figura 2.56: Tensión acimutal en función del radio en el composite a w=0 (plano ecuatorial) / (deformada x50).
2 Diseño del rotor
142
Desplazamientos radial ur y axial uz [m] /w0
ur [m]
uz [m]
Figura 2.57: Desplazamientos radial y axial del composite a w=0. (deformada x50).
2.7.3.1.2
Rotor a máxima velocidad ( w = wmax)
Tensión radial σr[Pa] / wmax
2 Diseño del rotor
143
Tensión circunferencial σθ (r) / wmax
Figura 2.58: Distribución de tensiones radial y acimutal [Pa] en el composite a wmax (deformada x50)
2 Diseño del rotor
144
σr(r) / wmax (plano ecuatorial)
σr [Pa]
2 µ 107
0.25
0.30
0.35
- 2 µ 107
- 4 µ 107
- 6 µ 107
radio [m]
σr [Pa]
σθ [Pa]
σθ(r) / wmax (plano ecuatorial)
σr [Pa]
5.0 µ 108
4.5 µ 108
4.0 µ 108
3.5 µ 108
3.0 µ 108
0.25
0.30
0.35
radio [m]
Figura 2.59: Distribución de tensiones y deformaciones radial y acimutal en la FC a wmax (deformada x50).
2 Diseño del rotor
145
Desplazamiento radial ur [m] /wmax
ur [m]
0.00075
0.00070
0.00065
0.25
0.30
0.35
radio [m]
Figura 2.60: Distribución del desplazamiento radial del composite y dependencia con el radio a wmax (deformada x50).
2 Diseño del rotor
146
2.7.3.2 Evolución de las tensiones y desplazamientos con w
2.7.3.2.1
Desplazamiento radial. Evolución de la deformada
1
2
3
ur (w) ( Pto A)
ur [m]
0.0008
0.0006
0.0004
A
A´
0.0002
0.0000
0
2000
4000
6000
8000 10000 12 000
w [rpm]
Figura 2.61: Evolución del desplazamiento con w [m] en la FC
2 Diseño del rotor
147
ur (w) (Pto A´)
ur [m]
0.0007
0.0006
0.0005
0.0004
0.0003
0.0002
0.0001
0.0000
0
2000
4000
6000
8000
10000
12 000
w [rpm]
Figura 2.62: Evolución del desplazamiento radial en el radio externo del volante/plano ecuatorial (Punto B)
2.7.3.2.2
Evolución de la tensión
σr (w) (Pto A)
σr [Pa]
- 1 µ 107
- 2 µ 107
- 3 µ 107
- 4 µ 107
- 5 µ 107
- 6 µ 107
- 7 µ 107
0
2000
4000
6000
w [rpm]
8000
10 000
12 000
Figura 2.63: Evolución de la tensión radial máxima de la FC (Punto A).
Como se puede apreciar en la figura, no se sobrepasa la tensión máxima de diseño de 85 MPa en compresión (Tabla
2.13) en dirección transversal a la fibra del composite, n=2.
2 Diseño del rotor
148
σθ (w) (Pto A)
σθ [Pa]
5 µ 108
4 µ 108
3 µ 108
2 µ 108
1 µ 108
0
0
2000
4000
6000
w [rpm]
8000
10 000
12 000
Figura 2.64: Evolución de la tensión máxima acimutal en la FC (Pto A) (Valor máximo admisible a tracción en
dirección de la fibra 600 MPa, n=3).
El contraste de resultados muestra una buena aproximación del estudio analítico
para calcular las tensiones máximas del material y los desplazamientos en función de
la velocidad. Sin embargo, para la distribución espacial de dichas magnitudes, el
estudio analítico no es demasiado satisfactorio. Este hecho se debe fundamentalmente
a la simplificación realizada para el composite, que se modeló en el desarrollo de las
expresiones analíticas como material isótropo, cuando en realidad presenta unas
características anisótropas muy marcadas debido a la orientación de la fibra.
Por lo tanto, para realizar un primer dimensionamiento de las piezas es aceptable la
aproximación analítica, aunque un estudio detallado de los fenómenos que ocurren en
el interior del material precisa modelar las propiedades del composite de forma más
realista, algo que se consigue con éxito a partir del modelo de EF.
2 Diseño del rotor
2.7.4
149
Acoplamiento del Sistema de guiado
2.7.4.1 Ajuste de las armaduras de los cojinetes. Fibra de vidrio
El sistema de guiado está compuesto por un sistema de cojinetes magnéticos axial y
otro radial. Además, es preciso incorporar un sistema de aterrizaje que consiste
básicamente en unos cojinetes convencionales que se ocupan de llevar al rotor al estado
de reposo en caso de que falle el sistema magnético o se precise detener el dispositivo.
Por lo tanto, se debe estudiar la manera de acoplar sendas armaduras ferromagnéticas
sobre el rotor y diseñar el acoplamiento del sistema giratorio sobre los cojinetes de
aterrizaje.
La solución adoptada consiste en disponer dos anillos de fibra de vidrio en el
interior del eje del rotor sobre los que acoplar las armaduras. De esta manera, por una
parte se consigue reducir el radio de giro de dichos componentes, con la consiguiente
relajación
Armadura C. Axial
Acero macizo
Volante FC T300/2500
de
los
esfuerzos centrífugos, y
además se dispone de
un medio sobre el que
poder fijarlos. El ajuste
se realiza por presión a
partir
del
desplazamiento
que
sufre
Armadura
C. Radial
Acero
laminado
la
superficie
interna del eje debido al
zunchado del volante
de
FC
sobre
su
superficie externa. El
emplazamiento
Fibra de vidrio
Scotch/Epoxi
Eje Al 7475-T651
Figura 2.65: Detalle del sistema de fijación para las armaduras del sistema
magnético de guiado. Modelo axisimétrico de las armaduras superiores.
de
dichos anillos se sitúa
en ambos extremos del
eje, disponiéndose de
espacio suficiente entre
2 Diseño del rotor
150
ellos para la colocación de los imanes y la máquina eléctrica. El arreglo propuesto se
muestra en la Figura 2.65. A continuación se exponen los esfuerzos y desplazamientos
de cada una de las piezas.
2.7.4.2 Esfuerzos y deformaciones en el ajuste. Fuerzas de contacto
El ajuste tanto de los anillos de fibra de vidrio como de las armaduras de los
cojinetes radiales se realiza por presión. Sin embargo, no se precisa interferencia entre
las dimensiones radiales de ambas piezas, pues el ajuste del volante sobre el eje
proporciona la compresión necesaria para que las piezas queden correctamente fijadas
y trabajen a cierta compresión, lo que resulta beneficioso para la vida a fatiga. El
modelado del material laminado de la armadura radial como acero macizo se basa en
la suposición de inexistencia de esfuerzos cortantes entre las láminas. Sin embargo, esta
suposición no es del todo cierta, ya que las deformaciones derivadas del ajuste de las
piezas hacen que las láminas no permanezcan absolutamente horizontales con lo que
aparecerán cortantes. Con objeto de compensar parcialmente esta deficiencia, se
buscará en la medida de lo posible que los esfuerzos en la armadura radial sean lo más
bajos posibles. A continuación se muestran los esfuerzos de contacto entre la fibra de
vidrio y la armadura radial y el eje, y sus deformaciones a distintas velocidades.
Figura 2.66: Presión de ajuste entre la armadura del cojinete radial y la FV [Pa]
La presión de contacto en reposo entre la armadura radial y la fibra de vidrio es de 24.5 MPa aproximadamente y se
reduce conforme incrementa la velocidad hasta unos 4.5 MPa a velocidad máxima. En cuanto a la unión fibra de
vidrio-eje se observa un valor de ajuste a rotor parado de unos 32 MPa que se reduce al valor de 20 MPa girando a
wmax. El valor del ajuste debe proporcionar una fuerza mínima de contacto en esta situación, pero incrementar la
2 Diseño del rotor
151
presión de ajuste demasiado perjudicaría a la fibra de vidrio, que al igual que el composite del volante, está orientada
en dirección acimutal, con lo que su resistencia a esfuerzos radiales es bastante reducida.
D E
Figura 2.67: Deformación en el ajuste de la armadura del cojinete radial y presión de contacto a rotor parado [Pa]
(deformada x 50)
Figura 2.68: Evolución de la presión de contacto armadura-fibra de vidrio y fibra de vidrio-eje con w.
2 Diseño del rotor
152
Como se puede apreciar, el ajuste propuesto respeta las tensiones de diseño expuestas en la ¡Error! No se encuentra
el origen de la referencia., pág. ¡Error! Marcador no definido.. y proporciona un ajuste mínimo suficiente para la
solidez de las uniones.
2.7.4.3 Esfuerzos en la fibra de vidrio
2.7.4.3.1
Rotor parado
σr / w0
σθ / w0
Figura 2.69: Esfuerzos en la fibra de vidrio a rotor parado [Pa]. Los esfuerzos provienen del ajuste a presión.
2.7.4.3.2
Rotor a máxima velocidad
σr / wmax
σθ / wmax
Figura 2.70: Esfuerzos en la fibra de vidrio a wmax [Pa].
2 Diseño del rotor
153
La resistencia mecánica del composite de FV se evalúa a partir de las resistencias del material en dirección
longitudinal y transversal a las fibras. Se observa que el estado tensional de los anillos de FV está dentro de margen.
2.7.4.4 Esfuerzos y deformaciones en las armaduras del cojinete radial
2.7.4.4.1
Esfuerzos a rotor parado
σr / w0
σθ / w0
σeqv / w0
Figura 2.71: Esfuerzos en la armadura del cojinete radial a rotor parado [Pa].
2.7.4.4.2
Esfuerzos a máxima velocidad
σr / wmax
σθ / wmax
σeqv / wmax
Figura 2.72: Esfuerzos en la armadura del cojinete radial a máxima velocidad [Pa].
2 Diseño del rotor
2.7.4.4.3
154
Evolución del desplazamiento radial con la velocidad
ur / w=0 rpm
ur / w=6800 rpm
ur / w=13333 rpm
A
B
C
Figura 2.73: Evolución del desplazamiento radial [m] con la velocidad en la armadura del cojinete radial.
Figura 2.74: Desplazamientos en las armaduras de los cojinetes radiales
Como se puede apreciar en la Figura 2.74: Desplazamientos en las armaduras de los cojinetes radiales, el
desplazamiento radial absoluto en todo el margen de operación del dispositivo es de unos 280 [µm], lo que parece un
2 Diseño del rotor
155
valor asumible por el control teniendo en cuenta que las variaciones de entrehierro del cojinete son de +-1 mm sobre la
posición de equilibrio que está en torno a los 2.5 mm.
2.7.4.5 Esfuerzos y deformaciones en las armaduras de los cojinetes axiales. Materiales
Las armaduras de los cojinetes axiales no están sometidas a precompresión, y por lo
tanto están totalmente descargadas a rotor parado. Sin embargo, debido a este hecho, y
a pesar de haberse instalado con el menor radio de giro que permite el espacio
disponible y la geometría del sistema, se llega a altos niveles de tensión que podrían
producir fallo por fatiga del material.
Se han propuesto distintos aceros de alta resistencia para mecanizar las piezas. El
AISI 4130 presenta altos valores de resistencia mecánica que están en torno a los 1150
MPa, lo que supone un límite de fatiga de aproximadamente 550 MPa, aunque no está
especialmente optimizado para dispositivos electromagnéticos. Otra de las aleaciones
interesantes por su excelente comportamiento mecánico, denominada comercialmente
AerMet 100 (fabricado por Carpenter/ www.cadtech.com) presenta también buenos
valores de resistividad y una saturación de 1.7 T, lo cual lo convierte en una interesante
opción. Otra buena alternativa es la familia de aceros martensíticos, dentro de los
cuales se han encontrado aleaciones con interesantes propiedades de resistencia y baja
conductividad.
2 Diseño del rotor
156
Materiales
Acero inoxidable
martensítico UGI 4313
(www.ugitech.com)
Acero (Ni-Co) AerMet
100
(www.cadtech.com)
Acero AISI
4130 ( CrMo, medio
carbono)
Res. tracción
Sut
-
1965
1150
MPa
Res fluencia
Sy
1000
1724
1110
MPa
Sp
800
-
-
MPa
Sf
500
750
550
MPa
ρ
60
43
27
µΩ.cm
µ
300
180
-
n
2
2
2
-
500
950
550
MPa
Límite elástico
0.2%
Límite de
fatiga. N=∞
Resistividad
eléctrica a 100º
C
Permeabilidad
máxima
Coef. de
seguridad
estático
Tensión de
diseño (Sf)
Tabla 2.24: Posible alternativa al acero AISI 4130 para el mecanizado de las armaduras de los cojinetes axiales. Datos
de www.matweb.com, www.ugitech.com y www.cadtech.com
Se debe buscar un compromiso entre resistencia mecánica y conductividad eléctrica,
que debe ser la menor posible para minimizar el efecto de las corrientes parásitas tan
perjudiciales en el desempeño de los cojinetes. El material ideal presenta altos valores
de resistencia mecánica y eléctrica y una alta permeabilidad magnética, pero en la
realidad práctica no es fácil encontrar un acero que aúne ambos requisitos, pues los
aceros magnéticos optimizados para minimizar las corrientes de Foucault no son los
que presentan las mejores propiedades mecánicas. Los aceros magnéticos de alta
resistencia tienen valores máximos de permeabilidad relativa mucho menores que
aquellos optimizados para núcleos ferromagnéticos, pero presentan una resistencia y
ductilidad muy superior, además de valores razonables de resistencia eléctrica.
En resumen, las ventajas del AISI 4130 son su mayor resistencia mecánica y menor
coste y el punto fuerte del martensítico es su alta resistividad. Por su parte, la tercera
aleación propuesta en la Tabla 2.24, denominada comercialmente AerMet 100, presenta
unas excelentes prestaciones mecánicas y tiene un comportamiento magnético bastante
bueno, aunque su coste es bastante superior a los anteriores. Los aceros ferríticos y al
silicio también se han estudiado, pero su resistencia mecánica los hace no aptos para la
aplicación buscada. Por lo tanto, el mejor acero para la construcción de las armaduras
2 Diseño del rotor
157
es el AerMet 100, y será el material con el que se diseñarán las armaduras móviles de
los cojinetes axiales.
σr / wmax
Figura 2.75: Tensión radial en la armadura del cojinete axial a máxima velocidad [Pa].
σeqv / wmax
Figura 2.76: Tensión equivalente Von Mises en la armadura del cojinete axial a máxima velocidad [Pa]
2 Diseño del rotor
158
Como se puede apreciar en las figuras anteriores, los esfuerzos predominantes son
los acimutales, siendo el esfuerzo radial máximo un orden de magnitud menor que el
acimutal. Se alcanza una tensión equivalente máxima de casi 550 MPa en el radio
interno de la armadura, lo que indica que la resistencia mecánica de la pieza es crítica.
El material con el que se ha modelado el problema es el acero AISI 4130. Sin embargo,
los resultados obtenidos se pueden extrapolar sin mucho error al caso de otros aceros,
pues el módulo de elasticidad y el coeficiente de Poisson no varían sustancialmente de
uno a otro.
El desplazamiento axial de la pieza a máxima velocidad debe ser estudiado ya que
influye en la magnitud del entrehierro y por tanto en la forma de trabajar de los
cojinetes. En reposo no existirá tal desplazamiento, ya que la pieza está prácticamente
descargada. El desplazamiento radial se ha calculado con objeto de prever el zócalo
necesario en los cojinetes de aterrizaje para disponer de suficiente superficie de apoyo
en todo el rango de velocidades de trabajo.
El modo de acoplamiento de las armaduras sobre la fibra de vidrio se hará por
medio de pasadores con rosca que atraviesan tanto la armadura como el anillo de fibra
de vidrio uniendo ambas partes solidariamente. Con objeto de que las concentraciones
de tensiones que aparecen en los taladros no destruyan el material, es conveniente que
se perfore la pieza en los puntos más alejados posibles al eje de rotación. La razón es
evidente si se observa la distribución de tensiones a lo largo del radio de la pieza, que
decrece con el radio. De esta manera, la disminución del límite de fatiga que
experimenta la pieza debido a los taladros se compensa situándolos en zonas menos
esforzadas de la pieza
Figura 2.77: Distribución del desplazamiento radial a máxima velocidad en las armaduras axiales [m].
.
3
Sistema de guiado
3 Sistema de guiado
160
3 Sistema de guiado
3.1 Introducción
La elevada velocidad de operación del volante que se sitúa en torno a las 13.300 rpm
convierte el sistema de guiado del rotor en un elemento crítico a la hora garantizar la
robustez y la fiabilidad del sistema. Velocidades tan altas hacen difícil encontrar
rodamientos comerciales que se ajusten a los requerimientos de velocidad y
durabilidad que se esperan del dispositivo (10 años de vida / 700.000 ciclos de cargadescarga). Además, de existir rodamientos convencionales capaces de cumplir las
exigencias de operación, y obviando su coste, se derivarían unas pérdidas asociadas
demasiado elevadas.
Bastidor
Cojinete axial
superior
Armadura
C.Axial
Cojinete
radial
superior
(octupolo)
Armadura
C. Radial
(laminado)
Máquina
eléctrica
Cojinete
radial
inferior
Cojinetes de
aterrizaje
Cojinete axial
inferior
Figura 3.1: Ubicación del sistema de guiado. Modelo axisimétrico
Por lo tanto, el sistema de cojinetes del prototipo se plantea de forma natural como
una combinación de electroimanes con imanes permanentes. Estos últimos deben
proporcionar un empuje suficiente para poder compensar el peso del rotor del
3 Sistema de guiado
161
dispositivo. Por su parte, los electroimanes permitirán variar la magnitud de la fuerza
proporcionando capacidad de control sobre la posición vertical del volante. El objetivo
es conseguir la levitación del volante en su operación normal, disponiéndose de unos
rodamientos auxiliares de aterrizaje que proporcionen apoyo en caso de que ocurra
alguna incidencia, además de guiar y llevar al estado de reposo al volante en los
momentos de arranque y desconexión del dispositivo.
Además de la sustentación vertical del rotor, se precisa un sistema de rodamientos
de empuje radial que se ocupen de mantener el eje de giro en posición vertical en todo
momento. La solución adoptada para el sistema de empuje radial carece de imanes
permanentes y consiste en dos electroimanes iguales de ocho polos
colocados
simétricamente respecto al plano ecuatorial del rotor. Cada uno de los cojinetes
radiales está compuesto por un núcleo laminado de acero magnético (recubrimiento de
Stabolit) fijado en el interior del rotor anularmente sobre el bastidor. Las armaduras
sobre las que trabajan dichos cojinetes están igualmente laminadas. Sin embargo, los
cojinetes axiales deben trabajar sobre sendas armaduras de acero macizo, dadas las
dificultades técnicas que supondría la laminación de la pieza y la elevada resistencia
mecánica que se espera de ella..
El diseño y cálculo de ambos cojinetes, axiales y radiales, se ha realizado con
elementos finitos apoyados por formulación analítica basada en la teoría de circuitos
magnéticos. El cálculo de las fuerzas magnéticas se ha realizado a partir del tensor de
Maxwell
partiendo
de
la
expresión
analítica
proporcionada
por
la
teoría
electromagnética y resolviéndola a partir del cálculo del campo obtenido por EF.
El objetivo fundamental ha sido dimensionar ambos sistemas de forma que
proporcionen las fuerzas necesarias para poder controlar el dispositivo en régimen
dinámico, obteniéndose el modelo matemático que liga las fuerzas con la corriente
inyectada en cada uno de los cojinetes. Además, se propone un esquema de control en
el caso del sistema axial, aunque no se analiza con profundidad, dejando el estudio
detallado y diseño del sistema de control para una segunda fase de maduración del
prototipo.
3 Sistema de guiado
162
3.2 Fundamentos teóricos
3.2.1 Introducción
En este apartado se desarrollan las ecuaciones necesarias para el diseño de los
cojinetes magnéticos y el cálculo del par generado por la máquina eléctrica. En primer
lugar se expone brevemente el modelado de los circuitos magnéticos que proporciona
un método de cálculo aproximado para obtener la inducción en las superficies del
material ferromagnético. A continuación, se desarrolla la ecuación general que permite
obtener las fuerzas sobre las armaduras de los cojinetes. Dicho procedimiento se basa
en la aplicación del Tensor de Maxwell y será el método utilizado tanto en el estudio
analítico como en el de EF para el cálculo de las fuerzas. Para la aplicación del Tensor
de Maxwell se requiere la solución del campo magnético sobre los volúmenes en los
que se desea calcular las fuerzas. Dicha solución será la que arroje la aplicación de la
teoría de circuitos magnéticos o el cálculo con EF, según corresponda. Finalmente, se
presentan las curvas fundamentales de los imanes permanentes y los conceptos de
máxima energía magnética (BHmáx) y desmagnetización, escogiéndose el material
magnético más apropiado para el diseño tanto del cojinete axial superior como del
rotor de la máquina eléctrica, y proporcionándose sus parámetros característicos.
3.2.2
B
Ф
µ
µr
H
ℓ
ƒ
σ
ρ
J
I
Circuitos magnéticos
inducción magnética
flujo magnético
permeabilidad absoluta
permeabilidad relativa
intensidad campo magnético
longitud
fuerza
conductividad eléctrica
resistividad eléctrica
densidad de corriente
corriente
T
Tm2
Tm/A
A/m
m
N
(Ω m)-1
Ωm
A/m2
A
Tabla 3.1: Símbolos y unidades para los parámetros involucrados en el estudio del sistema magnético de guiado
3 Sistema de guiado
163
En el proceso de diseño y análisis de cualquier dispositivo electromagnético se
precisa conocer la distribución de los campos eléctrico y magnético en toda la región de
estudio para poder obtener resultados precisos y fiables. Esto se logra a través de la
resolución de las ecuaciones de Maxwell. Sin embargo, la complejidad que dicho
análisis conlleva hace necesaria la aplicación de potentes métodos numéricos como el
de los Elementos Finitos cuando la geometría del problema se aleja de lo trivial, lo cual
suele suceder en la mayoría de los dispositivos que se diseñan actualmente.
Por lo tanto, es interesante disponer de algún procedimiento de cálculo auxiliar que
permita aproximarse al problema y obtener resultados preliminares que, aun
careciendo de precisión, sirvan de ayuda al diseñador en la medida en que le acercan al
problema y le proporcionan órdenes de magnitud que le orientan sobre la corrección
de los resultados que arroje un posible análisis numérico posterior. Este método de
cálculo auxiliar se basa en las analogías entre los circuitos eléctricos de CC y los
circuitos magnéticos y se expone brevemente a continuación para su aplicación
posterior en el predimensionamiento de los electroimanes.
Cabe destacar las siguientes diferencias fundamentales entre los circuitos de CC y
los magnéticos:
Los circuitos de CC presentan un comportamiento lineal mientras que los
circuitos magnéticos se rigen por una característica B-H no lineal propia del
material y solamente presentan un comportamiento lineal en un pequeño rango
de valores acotado por la saturación del material. Dicho de otro modo, en los
circuitos de CC la conductividad σ se puede considerar constante, mientras que
en un circuito magnético la permeabilidad µ es función de la intensidad de
campo H.
Por otra parte, la permeabilidad de los materiales ferromagnéticos que
constituyen los caminos para el flujo es mucho menor que la conductividad
eléctrica, lo que se traduce en una mayor dispersión de las líneas de inducción
magnética que a veces puede ser difícil de cuantificar y puede conducir a
resultados poco aproximados.
3 Sistema de guiado
164
La presencia de entrehierros en los circuitos magnéticos influye en el área
efectiva del flujo magnético, pues las líneas de campo tienden a abrirse al
atravesar zonas de baja permeabilidad.
Estos efectos se pueden modelar analíticamente por medio de parámetros obtenidos
experimentalmente como el coeficiente de dispersión o de Hopkinson ν que cuantifica
la magnitud del flujo disperso y se ajusta a la siguiente expresión:
ν=
φt φu + φ d
φ
=
= 1+ d
φu
φu
φu
Donde Фt, Фu y Фd representan respectivamente los flujos total, útil y de dispersión
del circuito magnético. Por lo tanto, se debe ser cauteloso y tener en cuenta estos
factores a la hora de analizar la validez de los resultados.
A continuación se desarrollan las ecuaciones que gobiernan los circuitos magnéticos
y que se emplearán para realizar el predimensionamiento de los electroimanes. El
desarrollo se apoya en la analogía entre los circuitos magnéticos y los eléctricos de CC.
Partiendo de las siguientes relaciones fundamentales:
Ley de Ampère
∇× H = J
Conservación de flujo magnético
∇⋅ B = 0
Aplicando el teorema de Stokes a la ley de Ampère se tiene:
∫∫ ∇ × H ⋅ da = ∫∫
A
A
J ⋅ da = ∫ H ⋅ dl
Si asumimos que la densidad de corriente Ji es uniforme en los Ni conductores de las
i bobinas tendremos:
3 Sistema de guiado
165
∫∫
A
J i ⋅ da = N i I i
Siendo Ii la corriente que recorre el solenoide. Si además asumimos que el camino de
integración para la integral de línea de H se puede dividir en n segmentos en los que se
puede considerar que el vector H mantiene su magnitud constante y es paralelo a dl y
suponemos que nos movemos dentro de la zona lineal de la curva BH del material en
cuestión obtenemos la siguiente expresión.
n
∑
Bk l k
µk
k =1
i
n
k =1
k =1
= ∑ Ni I i = φ ⋅ ∑ℜk
(1)
Donde se puede apreciar la analogía con la ley de Ohm, siendo el sumatorio de las
f.m.m.s el término análogo a la suma de la f.e.m.s, el flujo magnético Ф análogo a la
intensidad de corriente I, y el sumatorio de reluctancias a la suma de resistencias en la
malla.
Ahora aplicaremos el teorema de Gauss a la ecuación de conservación del flujo
magnético
∫∫
A
B ⋅ da =
∫∫∫ ∇ ⋅ B ⋅ dv = 0 (2)
V
Si ahora suponemos que la superficie del volumen V se puede dividir en n áreas Ai
en cada una de las cuales la inducción Bi es aproximadamente uniforme, se puede
escribir para cada de ellas:
∫ B ⋅ da = B ⋅ A = φ
i
i
i
i
i
Ai
(3)
Entonces, a partir de (2) y (3) se tiene:
n
∫∫B⋅ da = ∑∫ B ⋅ da
i=1 Ai
A
n
∑φ
i =1
i
i
=0
(4)
i
3 Sistema de guiado
166
3.2.3 Fuerzas magnéticas. Tensor de Maxwell
Se expone a continuación el procedimiento general que se ha empleado a lo largo de
este proyecto para el cálculo riguroso de fuerzas y pares magnéticos en las
simulaciones con elementos finitos. Es el denominado tensor de esfuerzos de Maxwell.
Asumimos que la magnetización presente en el material es equivalente a una
distribución volumétrica de densidad de corriente, que se distribuirá completamente
por la periferia si sus dominios magnéticos están suficientemente alineados. Además, si
se tienen fuentes de corriente libre se tendrá:
Contribución de las corrientes electrónicas producidas por una magnetización
uniforme M
JM =∇×M
Fuentes de corriente libre
JF = ∇×H
La fuerza total sobre el material ferromagnético se obtiene como:
F = ∫(JM + JF )×B⋅ dv= ∫(∇×H +∇×M)×B⋅ dv
Como la inducción magnética total viene dada por,
B = µ0 (H + M )
obtenemos:
F=
1
µ0 ∫
(∇× B)× B⋅ dv
Aplicando las siguientes identidades:
∫ (B ⋅ B )dS − 2 ∫ B (B ⋅ dS ) = 2 ∫ B × (∇ × B )dv − 2 ∫ B (∇ ⋅ B )dv
3 Sistema de guiado
167
(∇×B)×B = −B×(∇×B)
Se obtiene:
F=
1
µ0
1
1
∫ B(B ⋅ dS ) − 2µ ∫ (B ⋅ B)dS − µ ∫ B(∇ ⋅ B)dv
0
0
Pero como B es solenoidal,
∇⋅ B = 0
El último término desaparece, quedando
F=
1
µ0
1
∫ B(B ⋅ dS ) − 2µ ∫ (B ⋅ B)dS
0
Esta expresión se puede compactar en
F = ∫ T ⋅ dS
(5)
1
1
2
Bi B j − δ ij Bij
µ0
2
i = j → δ ij = 1
Tij =
i ≠ j → δ ij = 0
Donde T representa el Tensor de Esfuerzos de Maxwell
El resultado se simplifica aún más si se supone que el campo B es perpendicular a la
superficie, suposición más que acertada cuando se trata de materiales de alta
permeabilidad como lo son los ferromagnéticos. En este caso la expresión se reduce a:
F≈
1
2µ 0
∫| B |
2
dS
(6)
3 Sistema de guiado
168
Aplicando (5) ó (6) a la distribución de B sobre las superficies ferromagnéticas se
obtiene el valor de la fuerza magnética total. La expresión (5) es tanto más exacta
cuanto mayor sea la permeabilidad del ferromagneto, pues las componentes de B
tangentes a la superficie serán mucho menores. El cómputo definitivo de las fuerzas se
realizará sustituyendo la solución del campo proporcionada con el método de los EF en
la expresión exacta del Tensor de Maxwell (5).
3.2.4
Imanes permanentes. Punto de BHmáx. Elección del material para los
imanes
3.2.4.1 Introducción
Ciertos
materiales
magnéticos
conocidos
comunmente
como
imanes
permanentes están caracterizados por tener un ciclo de histéresis con altos valores de
inducción remanente Br y campo cohercitivo Hc. La remanencia se puede entender
como la capacidad para establecer flujo en ausencia de fuentes de corriente, mientras
que la cohercitividad representa el valor de campo inverso necesario para anular la
inducción
en
el
material. Se clasifican
como
materiales
magnéticos
debido
duros
a
su
cohercitividad
alta
(Hc>1
kA/m)
en
contraposición
a
los
materiales blandos que
presentan un ciclo de
histéresis mucho más
estrecho y se emplean
en
Figura 3.2:: Curvas de magnetización en CC para materiales de imanes
permanentes más comunes. (Fitzgerald, Kingsley, & Umans)
totalmente
Los
aplicaciones
distintas.
imanes
3 Sistema de guiado
169
permanentes son capaces de crear importantes densidades de flujo magnético en
circuitos con entrehierros notables. Su comportamiento se analiza con dos curvas
características; la curva de desmagnetización, que se corresponde con la zona de la
curva de histéresis ubicada en el segundo cuadrante, y la curva intrínseca de
desmagnetización, en la que se representa la magnitud de µ0M frente a H para valores
de H<0. Mayor importancia en el diseño de circuitos con imanes cobra el valor de el
llamado campo cohercitivo intrínseco Hci, que es la intensidad de campo necesaria para
desmagnetiazar el material. Su valor se ubica en el punto de corte de la curva intrínseca
de desmagnetización con el eje de abcisas. Se debe vigilar que el punto de trabajo del
imán se encuentre alejado del punto de Hci con un margen de seguridad suficiente que
garantice su magnetización.
En la Figura 3.2 se puede observar la superioridad de los imanes de tierras raras
con respecto a los demás tipos en cuanto a la magnitud del campo cohercitivo,
obteniéndose los máximos valores para los imanes de NdFeB. Además, estos imanes
presentan el mayor campo remanente junto con el Alnico 5, pero con mucha más
coercitividad, obteniéndose campos cercanos a 1.3 [T]. Estas propiedades permiten
obtener importantes fuerzas magnéticas con poco volumen de material, por lo que
resultan idóneos para su aplicación como elemento pasivo en el cojinete axial superior
y en rotor de la máquina eléctrica. Además, en el caso del NdFeB, las curvas intrínsecas
de desmagnetización cortan el eje de abcisas en puntos menores que el campo
cohercitivo para temperaturas de trabajo en torno a 100ºC, lo que asegura un buen
comportamiento del imán ante la desmagnetización en el rango de temperaturas de
trabajo estimadas en la máquina. Por lo tanto, será el material escogido para su
aplicación tanto en el cojinete axial superior como en la máquina eléctrica que se
diseñará en el siguiente capítulo.
A continuación, se muestran las curvas características proporcionadas por I.M.A. SL
para imanes de NdFeB de calidad N35UH a distintas temperaturas de trabajo. Las
propiedades de los imanes para el cálculo de los cojinetes se obtendrán de la siguiente
figura tomando la curva de mayor temperatura (120º C).
3 Sistema de guiado
Figura 3.3:Curvas características de imanes de NdFeB N35UH a distintas temperaturas de trabajo.
170
3 Sistema de guiado
171
Como se puede apreciar en la Figura 3.3 el efecto de la temperatura reduce la
capacidad de los imanes para establecer campo y favorece su desmagnetización. Este
hecho se debe al efecto negativo que tiene la agitación térmica molecular en la
alineación de los dominios magnéticos. Sin embargo, para 120º C, todavía se pueden
obtener importantes inducciones ligeramente superiores al Tesla y el campo
cohercitivo intrínseco se mantiene cercano al MA/m, lo cual proporciona un amplio
margen de seguridad en cuanto a la solidez de la magnetización. En la Tabla 3.2 se
resumen los valores obtenidos de las curvas de la Figura 3.3 a 120ºC que serán los que
se empleen en los cálculos.
Br
Hc
Bm
Hm
BHmax
Hci
1.032
-749.3
0.513
-378.3
194 103
-968.5
T
kAv/m
T
kAv/m
J/m3
kAv/m
Tabla 3.2: Valores de trabajo de los imanes de NdFeB N35UH a 120ºC.
3.2.4.2 Punto de BHmáx.
Uno de los objetivos que se han perseguido
en el diseño de los actuadores es ubicar el
punto de trabajo de los imanes lo más cercano
posible a áquel cuyo producto B por H sea
máximo (BHmax). La razón de esta elección es
sencillamente
optimizar
el
volumen
de
imanes empleado y por lo tanto su coste y
Figura 3.4: Circuito magnético para el desarrollo del
peso. A continuación, se presenta un ejemplo
punto de BHmáx (Fitzgerald, Kingsley, & Umans)
ilustrativo para explicar la importancia de éste
parámetro, también llamado punto de máxima densidad de energía magnética del
imán.
Supongamos que tenemos un circuito magnético como el que se presenta en
laFigura 3.4, en el que se ha incluído un pequeño entrehierro de longitud g y un imán
3 Sistema de guiado
172
permanente de NeFeB de longitud d. Las secciones transversales tienen un valor Am y
Ag como muestra la figura y se asume que no existe dispersión de flujo ni aumento del
área efectiva en el entrehierro. Asimismo, consideramos que la permeabilidad del
material del núcleo es infinita, lo que implica que toda la fuerza magnetomotriz cae en
el entrehierro y el imán.
Aplicando la ley de Ampère al circuito
∫ H ⋅ dl = ∫∫ J ⋅ ds = 0
S
Si se considera µFe=∞, tendremos que:
∫ H ⋅ dl = H
m
⋅ l m + H gl g = 0
(7)
De no existir flujo disperso se sigue:
φ = cte = Bg Ag = Bm Am
(8)
Además, si se considera la relación de medio entre B y H y se supone µm≈µ0, lo cual
es muy razonable en este tipo de imanes, se obtienen las dos ecuaciones siguientes:
Bg = µ 0 ⋅ H g
(9)
B m = µ 0 ⋅ H m (10)
Elevando (9) al cuadrado y sustituyendo el valor de Hg dado por (7) se tiene:
B g = µ 0 H g (− H m )
2
2
lm
lg
(11)
Si ahora se despeja Hg en (9) y se sustituye en (11) queda:
B g = µ 0 B g (− H m )
2
lm
(12)
lg
Despejando Bg en (8) e introduciéndolo en el miembro derecho de (12) obtenemos:
3 Sistema de guiado
173
l A
Vol
2
Bg = µ0 (−Bm H m ) m m = µ0 (−Bm H m ) m
l A
Vol
g g
g
Esta expresión indica que para maximizar el campo en el entrehierro optimizando el
volumen de material magnético empleado el imán debe trabajar lo más cercano posible
a su punto de BHmáx.
3.3 Cojinetes axiales
3.3.1 Introducción. Geometría del sistema de guiado axial
El presente apartado se centra en el diseño y cálculo de los actuadores axiales,
responsables de sustentar al volante y compensar las variaciones de las fuerzas de
inercia verticales que se producirán a bordo del tranvía en su funcionamiento normal.
Imanes
NdFeB
Placa
distribuidora
Solenoide
g0-x
x
g0+x
Armaduras
Figura 3.5: Detalle del sistema de cojinetes axiales.
Sección transversal de los cojinetes axiales. En el actuador superior se ha optado por desacoplar en la medida de lo
posible el campo de los imanes con el generado por el solenoide y tener así una mayor controlabilidad. Se puede
observar que las columnas internas de ambos electroimanes se han sobredimensionado con respecto a las externas con
objeto de tener una reluctancia aproximadamente constante en los circuitos magnéticos.
3 Sistema de guiado
174
El sistema de levitación axial representado en la Figura 3.5 está formado por dos
electroimanes, uno superior y otro inferior. Ambos están constituidos por sendas
llantas de acero magnético macizo en cuyo interior se ubican los solenoides que
permiten controlar las fuerzas. Además, el actuador superior dispone de una serie de
imanes permanentes de NeFeB colocados bajo la llanta en su parte externa que se
ocupan de soportar el peso total de la carga estática (3 kN aprox.) en la posición de
referencia (g0 = 2.6 mm). En la parte inferior de los imanes se ha colocado una chapa
distribuidora en forma de corona circular que se encarga de proporcionar un medio
altamente permeable para que las líneas de campo sean uniformes en las transiciones
entre imanes. Las armaduras móviles van unidas a los extremos del rotor a modo de
tapas, en las que se ha procurado un agujero central para permitir el acoplamiento con
el estator de la máquina. El sistema de fijación que se propone se realiza por medio de
pasadores sobre los anillos internos de fibra de vidrio colocados en los extremos del
rotor. Además, estas armaduras de los cojinetes axiales cumplen la función de topes
sobre los que trabajarán los rodamientos de aterrizaje.
La posición de equilibrio del sistema se da para un entrehierro de 2.6 mm y el
margen previsto de operación será de +- 1 mm sobre este punto. Por lo tanto, los
cojinetes de aterrizaje se situarán en dichos puntos extremos cumpliendo la función de
restringir el desplazamiento del rotor más allá de ellos.
Es importante destacar que la naturaleza altamente conductora del material
ferromagnético empleado, unido a la dificultad técnica de laminarlo, conducen a la
aparición de corrientes parásitas nada despreciables cuyo efecto habrá que analizar ya
que tiene una importancia crucial en las constantes de tiempo del sistema y por tanto
en la dinámica de actuación de los electroimanes.
3.3.2
Directrices de diseño y requisitos
En cuanto a las directrices de diseño y los requisitos esperables del sistema axial se
pueden hacer las siguientes puntualizaciones:
3 Sistema de guiado
175
Se debe generar un empuje de aproximadamente 3 kN en la posición de
equilibrio y en ausencia de corrientes, equivalente al peso de la masa
giratoria.
Entrehierro elevado. Se busca un diseño con entrehierro elevado para evitar
que las variaciones de fuerza magnética sean demasiado sensibles con la
posición. De esta manera, el efecto de las posibles vibraciones tendrá menos
influencia en las variaciones de fuerza de levitación así como las
deformaciones por efecto Poisson que aparecen por las cargas de inercia. Se
propone un entrehierro de 2.6 mm con un margen de maniobra de +- 1 mm.
Control. Buscaremos al menos un 50% de controlabilidad sobre la fuerza
base proporcionada por el imán. Este control será proporcionado por los
electroimanes.
Dinámica. Es importante estudiar los tiempos de establecimiento de las
fuerzas. Se estudiará el efecto de las corrientes parásitas en la dinámica de
funcionamiento.
Fiabilidad. Al ser un sistema híbrido, ante una contingencia en el sistema de
alimentación, control, o en la electrónica de potencia, se dispone de una
reserva de fuerza permanente proporcionada por los imanes que protege a
los rodamientos de aterrizaje en el sentido de hacerse cargo de parte del
empuje y disminuir por tanto las potenciales cargas de impacto que éstos
pueden sufrir.
Dada la naturaleza altamente inestable de la fuerza proporcionada por los
imanes permanentes, se debe dimensionar el actuador inferior para que sea
capaz que atraer al volante y conducirlo a la posición de referencia en la
situación más desfavorable, que se produce cuando la desviación es de 1
mm. Se debe estudiar no solo la magnitud de dicha fuerza, sino su tiempo de
3 Sistema de guiado
176
establecimiento, pues el volante no debe alcanzar sus posiciones extremas
durante su funcionamiento normal ya que comenzarían a trabajar los
cojinetes auxiliares de aterrizaje.
Por su parte, y siguiendo un razonamiento análogo al anterior, se debe
dimensionar el actuador superior para que sea capaz de atraer el volante
hacia la posición de equilibrio cuando se encuentra en su punto extremo
inferior y la fuerza magnética de los imanes a perdido magnitud y no es
capaz de levantar la masa rodante.
Los imanes permanentes deben trabajar en su punto de máxima densidad de
energía magnética para optimizar su tamaño y coste, es decir, se debe buscar
el punto de BHmax en la curva de desmagnetización del material. En cuanto a
la estabilidad de los imanes se debe vigilar que la magnitud de la intensidad
de campo magnético no sobrepase el valor crítico de Hci (Campo coercitivo
intrínseco), pues es el punto en el que se produce la rotación brusca de los
dominios y se pierde la magnetización.
3.3.3 Materiales aplicados.
El material empleado para los imanes permanentes es NdFeB cuyas propiedades y
curvas características se expusieron en el epígrafe (3.2.4, pág.168). Para mecanizar las
armaduras móviles del cojinete existen varias alternativas como se planteó en el
epígrafe (Tabla 2.24, pág. 156). La diferencia fundamental entre los aceros propuestos
es su resistencia mecánica y eléctrica. Con objeto de obtener el mejor compromiso entre
las propiedades deseadas, se ha escogido el acero al Ni-Co AerMet 100 fabricado por
Carpenter, cuyos elevados valores de resistividad y resistencia mecánica lo convierten
en la mejor opción.
3 Sistema de guiado
177
En cuanto al material empleado para mecanizar las llantas de los electroimanes, se
puede trabajar con aceros de menor resistencia que en el caso de la armadura móvil al
no existir esfuerzos rotacionales. Debido a la geometría de la pieza, es preferible
emplear acero macizo para evitar las complicaciones técnicas que implicaría su
laminación. Por lo tanto, las propiedades deseables para dicho componente son alta
permeabilidad
inducción
e
de
saturación, así como
alta resistividad para
B[T]
minimizar
las
corrientes
parásitas
con
pérdidas
sus
asociadas y mejorar la
dinámica del sistema.
El material propuesto
para
mecanizar
las
H[Av/m]
llantas de los cojinetes
Figura 3.6: Curva BH para modelar el comportamiento magnético del acero de las
llantas del sistema de cojinetes axiales
es un acero ferrítico
comercializado por la
casa Ugitech denominado UGI 4105 Si. Presenta unas excelentes propiedades
magnéticas y buena maquinabilidad. Sus propiedades junto con las de los demás
materiales empleados en el diseño del sistema de guiado axial y curva BH se presentan
en la Figura 3.6 y en la Tabla 3.3.
3 Sistema de guiado
178
Armaduras móviles / Acero al Ni-Co AerMet 100
Composición
C 0.23%, Ni 11.1%, Co 13.4%, Cr 3.1%, Mo 1.2%, Fe 70.97%
Proveedor
Carpenter www.cartech.com
Aplicaiones
Acero de muy alta calidad / Industria aeroespacial
ρ
7889
kg/m3
E
194
GPa
Sy
1724
MPa
Su
1965
MPa
∆L
14
%
Bsat
1.7
T
µrmax
200
-
ρe
43.05
µΩ cm
Núcleo /Acero ferrítico UGI 4105 Si
Composición
Acero inoxidable resulfurado al 17% Cr y 1.5% Si
Proveedor
Ugitech www.ugitech.com
Aplicaciones
Aplicaciones magnéticas / buena maquinabilidad
Bsat
1.5
T
µrmax
1200-2000
-
ρe
77
µΩ cm
Br
0.5-0.9
T
Hc
130-200
Av/m
Br
1.032
T
Hc
-749.3
kAv/m
Bm
0.513
T
Hm
-378.3
kAv/m
BHmax
194 103
J/m3
Hci
-968.5
kAv/m
ρe
90
µΩ cm
Imanes / NdFeB
Bobinado de los solenoides / pletina de Cu
Dimensiones
3x1
mm
Sección efectiva
2.24
mm2
ρe @ 100ºC
2.5
µΩ cm
Tabla 3.3: Propiedades de los materiales empleados en el diseño del sistema de cojinetes axiales
3.3.4
Diseño del cojinete axial superior
En este apartado se exponen los resultados obtenidos para el actuador superior en
régimen estable. Como se ha expuesto en apartados precedentes se debe dimensionar
3 Sistema de guiado
179
el cojinete axial superior de forma que se tenga una reserva de fuerza suficiente para
poder levantar el rotor en la situación más desfavorable, dada para x=-1.
La magnitud de la fuerza necesaria para controlar el movimiento axial del rotor se
ha establecido que debe ser al menos igual al peso de la masa rodante. Por lo tanto, se
debe dimensionar el sistema para que sea capaz de proporcionar una fuerza neta de al
menos 3 kN en la peor situación posible. Teniendo en cuenta el peso del rotor, se debe
generar un empuje de al menos 6kN entre los imanes y el solenoide. Se ha establecido
como límite superior para las corrientes del solenoide un valor de 6 A/mm2. Teniendo
en cuenta que el sistema opera en vacío este valor puede parecer excesivo, pero si se
considera que el sistema operará la mayor parte del tiempo en torno a la posición de
equilibrio (gap=2.6 mm, x=0), la corriente se mantendrá la mayor parte del tiempo en
valores bastante inferiores.
3.3.4.1 Aproximación analítica
Antes de presentar el diseño definitivo obtenido mediante cálculos por EF se
presenta una primera aproximación analítica a partir de los métodos expuestos en la
introducción teórica. En primer lugar se dimensionarán los imanes permanentes de
forma que se obtenga un empuje igual al peso del rotor (3 kN) a partir del campo
generado por el imán y en ausencia de corrientes. En el dimensionamiento se procurará
establecer el punto de trabajo del imán lo más próximo posible a su punto de máxima
densidad de energía (BHmax).
El circuito magnético equivalente del actuador superior se puede modelar como
sigue y se muestra en la Figura 3.7. Se supone que el núcleo presenta una
permeabilidad muy elevada de forma que toda la fuerza magnetomotriz cae en los
entrehierros del sistema y a través del imán, que se supone igual de permeable que el
aire. De esta manera, se puede sustituir cada entrehierro y el propio imán por una
reluctancia. El imán permanente se puede modelar como una fuente de fuerza
magnetomotriz de valor NI=Br hm/µ0, donde hm representa la longitud del imán y Br la
remanencia del imán permanente.
3 Sistema de guiado
180
Rm
Ri
Ф1
Rc
Ф2
Br hm/µ0
Rd
Figura 3.7: Modelo circuital para el predimensionamiento analítico del cojinete axial superior
A partir de la geometría presentada en la Figura 3.5, se ha jugado con las
dimensiones del núcleo y las áreas enfrentadas con la armadura móvil hasta obtener
una fuerza de aproximadamente 4 kN, un 30% mayor que la requerida para compensar
el peso de la masa del rotor. Este sobredimensionamiento del sistema trata de
compensar las deficiencias del método analítico que no tiene en cuenta los flujos
dispersos, ni el aumento del área efectiva para el flujo en los entrehierros, ni la
permeabilidad finita del núcleo, etc. El cálculo de las fuerzas parte de la obtención de
las reluctancias mostradas en el circuito de la Figura 3.7 a partir de las dimensiones del
área transversal de las columnas y la longitud de los entrehierros. Para el sistema en
estado de referencia (x=0), se definió un gap de 2.6 mm. La reluctancia de cada rama
del circuito se obtiene como:
ℜi =
li
µ ⋅ Si
Donde li es la longitud del entrehierro o del imán según se trate y Si la sección del
núcleo transversal al flujo.
Resolviendo el circuito por mallas se obtienen los flujos de malla Ф1 y Ф2. A partir
de dichos flujos se puede obtener el flujo de cada rama del circuito. La columna
izquierda estará recorrida por un flujo Ф1, la central por el valor absoluto de la
diferencia | Ф1- Ф2|(el signo es indiferente ya que la fuerza viene dada por el
cuadrado del flujo), y la columna derecha por Ф2.Se considera que el flujo se distribuye
de forma uniforme sobre la sección transversal de las columnas del núcleo.
3 Sistema de guiado
181
Para los valores geométricos expuestos en la siguiente tabla y en ausencia de
corriente se obtiene una fuerza de 3830 N, con lo que se da por finalizado el
predimensionamiento. Se debe remarcar la importancia que tiene el punto de trabajo
del
imán
en
la
optimización
de
su
tamaño
y
robustez
ante
posibles
desmagnetizaciones. Por ello, al escoger las dimensiones de las distintas cotas del
electroimán se ha vigilado en todo momento que la relación longitud /superficie del
imán sea la apropiada para garantizar la cercanía al punto de BHmax.
Predimensionamiento analítico del actuador superior
Ancho columna izquierda
20
mm
Ancho columna central
10
mm
Ancho columna derecha
22
mm
Ancho culata izquierda
30
mm
Ancho culata derecha
12
mm
Espesor culata izquierda
14
mm
Espesor culata derecha
18
mm
Radio interno
115
mm
Altura total
30
mm
Espesor imán
3.5
mm
Ri
131718
A/Wb
Rc
193702
A/Wb
Rd
55437
A/Wb
Rm
101763
A/Wb
Br hm/µ0
2874.34
Av/m
Ai
15.708
10-3
m2
Ac
10.680 10-3
m2
Ad
30.31 10-3
m2
10-3
m2
Ad´
37.32
Фi
7.262 10-3
Фc
4.938
10-3
Фd
12.2 10-3
Wb
Bm
0.4
T
Wb
Wb
Hm
-457.5
kA/v
BmHm
182.99
kJ/m3
F
3830.9
N
Tabla 3.4: Resultados del predimensionamiento analítico del cojinete axial superior.
3 Sistema de guiado
182
3.3.4.2 Diseño del cojinete axial superior por EF
A partir del predimensionamiento del apartado precedente se dispone de un punto
de partida razonable para el modelado con EF. Refinando el diseño a partir de estudios
paramétricos sobre el modelo numérico se obtiene la siguiente geometría:
Dimensiones del cojinete axial superior
Ancho columna izquierda
22
mm
Ancho columna central
10
mm
Ancho columna derecha
24
mm
Ancho culata izquierda
30
mm
Ancho culata derecha
12
mm
Espesor culata izquierda
14
mm
Espesor culata derecha
18
mm
Radio interno
115
mm
Altura total
30
mm
Espesor imán
3.5
mm
Bm
T
Hm
0.513
-378.3
BmHm
194
kJ/m3
F
3093.5
N
kA/v
Tabla 3.5: Dimensiones del cojinete axial superior
3.3.4.2.1
Sistema en posición de referencia, x = 0 mm.
Distribución de la inducción magnética B. x=0 [mm] / j=0 [A/mm2]
Figura 3.8: Campo B generado por los imanes permanentes en posición de equilibrio. Como se puede apreciar el
sistema trabaja lejos de la saturación (Bsat=1.7T)
3 Sistema de guiado
183
Detalle del campo en el núcleo y la armadura móvil
Figura 3.9: Campo B en el núcleo y la armadura del cojinete axial superior
Líneas de campo en posición de referencia
Figura 3.10: Líneas de campo generadas por los imanes permanentes en posición de referencia
Punto de trabajo del imán. Intensidad de campo Hy
Figura 3.11: Punto de trabajo del imán x=0 / j=0. Se observa que el punto de trabajo está lejos del campo
desmagnetizante Hci=--968.5 kAv/m
3 Sistema de guiado
184
Cálculo de la fuerza magnética sobre la armadura superior
Figura 3.12: Distribución espacial de la fuerza magnética sobre la armadura del cojinete axial superior x=0 / j=0
Aplicando el Tensor de Maxwell sobre la superficie envolvente de la armadura
superior y teniendo en cuenta que el campo es axial la expresión del tensor se reduce a:
F=
1
2
By ⋅ dS
∫∫
2µ0 S
Y dada la geometría circular de la armadura se puede expresar la integral en
función del radio como:
F =
π ro 2
B y r ⋅ dr
2 µ 0 ∫ri
Si se define s como la distancia radial a partir del radio interno de la armadura e
forma que r=ri+s la integral anterior toma la siguiente forma
F =
π L 2
B y ( ri + s ) ⋅ ds (1)
2 µ 0 ∫0
Figura 3.13: Integración de (1) a lo largo de la armadura superior para el cálculo del empuje de los imanes. Se observa
en la figura un valor de F ≈ 3.15 kN.
3 Sistema de guiado
3.3.4.2.2
185
Rotor en posición inferior, x= -1 mm.
En la posición inferior del rotor se debe generar un empuje de al menos 3kN para
disponer de fuerza suficiente para controlar el dispositivo dinámicamente y poder
redirigirlo a su posición de equilibrio. La máxima corriente admisible se ha fijado en 6
A/mm2, aunque la mayor parte del tiempo el dispositivo trabajará con corrientes muy
inferiores. A continuación se muestran los resultados obtenidos
Distribución de la inducción magnética B. x=-1 [mm] / j=6 [A/mm2]
Figura 3.14: Distribución espacial del campo magnético B con rotor en posición inferior (x=-1mm / j=6 A/mm2)
Líneas de campo en posición inferior y con máxima corriente. x=-1 mm, j=6 A/mm2
Figura 3.15: Líneas de campo con el rotor en posición inferior y máxima corriente
3 Sistema de guiado
186
Intensidad de campo desmagnetizante Hy en los imanes
Figura 3.16: Campo desmagnetizante Hy del imán. (x= -1 mm / j=6 A/mm2)
Dimensionamiento del solenoide. Cálculo de la fuerza magnética
Figura 3.17: Integración de la fuerza sobre la armadura superior para (x= -1 mm / j=6 A/mm2)
La fuerza total máxima que se puede obtener inyectando 6 A/mm2 en el solenoide
superior asciende a 6.4 kN. Descontando el peso se obtiene una fuerza neta de
aproximadamente 3.4 kN, lo cual satisface el requerimiento de diseño establecido. En
esta situación, el flujo se cierra totalmente por las columnas extremas, siendo
prácticamente cero por la columna central, razón por la cual la gráfica de la Figura 3.17
presenta un tramo prácticamente horizontal.
3 Sistema de guiado
3.3.4.2.3
187
Rotor en posición superior. x=1 mm
La configuración del sistema axial superior permite variar la fuerza de atracción
aumentándola o disminuyéndola controlando la corriente inyectada. Sin embargo, la
fuerza atractiva no se puede aumentar y disminuir en la misma medida. Mientras se
puede incrementar la fuerza atractiva aumentando la corriente hasta la saturación del
material, la reducción de la fuerza está limitada. En ausencia de corriente, el imán crea
un flujo que circula en sentido antihorario y que retorna por las columnas central y
derecha del circuito magnético. Al ir incrementando la corriente con valores positivos,
se refuerza el flujo en el sentido establecido por el imán, incrementándose la fuerza de
atracción. En caso de invertir el sentido de la corriente, el solenoide crea un flujo que
circula en sentido horario oponiéndose al del imán y debilitándolo, y se consigue una
reducción de la fuerza atractiva. Este fenómeno es tanto más acusado cuanto menor
entrehierro presente el sistema y podría llegarse a la desmagnetización del imán para
valores muy elevados de corriente. A partir de cierto valor de la corriente invertida, el
efecto del solenoide resulta en una fuerza atractiva que se incrementa con el valor
absoluto de la corriente. Por lo tanto, mientras la corriente positiva se ha limitado a 6
A/mm2, la corriente invertida se debe limitar al valor correspondiente al mínimo que
presente la curva fuerza frente a corriente para la posición que se considere. A
continuación se muestra el comportamiento en el caso extremo (x=0 mm, j= -6
A/mm2).
Efecto de la corriente invertida en la desmagnetización del imán
Figura 3.18: Campo desmagnetizante Hy en el imán para la situación extrema (x=1 mm, j = -6 A/mm2). Como se
puede apreciar en la figura, el valor absoluto de H es elevado y mayor que en las situaciones previamente descritas, a
pesar de que todavía se está lejos del campo cohercitivo intrínseco a partir del cual se desmagnetiza el material (Hci=946 kAv/m).
3 Sistema de guiado
Campo magnético en condiciones de inversión de corriente
Figura 3.19: Campo magnético en condiciones de corriente invertida fuera de margen
188
3 Sistema de guiado
3.3.4.2.4
189
Obtención de las curvas fuerza frente a corriente para distintos entrehierros
Con objeto de caracterizar completamente al electroimán superior para el posterior
desarrollo del sistema de control se ha realizado un estudio magnetostático,
obteniéndose las relaciones fuerza frente a corriente para distintas posiciones del rotor
que barren todo el margen de operación previsto de +- 1mm sobre la posición de
referencia (g0=2.6 mm).
Figura 3.20: Curvas de fuerza neta del cojinete superior frente a densidad de corriente para distintos entrehierros. La
zona de trabajo va desde el mínimo de cada curva hasta el valor de densidad máxima admisible de 6 A/mm2
En la figura se pueden apreciar dos fenómenos. Por una parte se observa una
importante reducción de la pendiente en la curva correspondiente a x=1 mm a partir
de 3 A/mm2. Esta reducción es mayor para pequeños entrehierros (x=1 mm,
entrehierro=1.6 mm) siendo casi inapreciable en las curvas correspondientes a los
mayores entrehierros (curvas para x= -0.6, -1 mm). Este fenómeno se debe a la
saturación del material ferromagnético, y es por ello que con menores entrehierros
(posiciones x>0) su efecto es más acusado. El otro fenómeno observable en la figura es
la presencia de un mínimo en todas las curvas. Este fenómeno se comentó en el
3 Sistema de guiado
190
apartado precedente y supone el mínimo valor de fuerza atractiva que se puede
conseguir con corrientes negativas. El valor de la corriente mínima admisible depende
de la geometría del sistema magnético y por lo tanto de la posición del rotor. Con
objeto de delimitar a un único valor el valor mínimo de corriente negativa se establece
un rango de variación de la densidad de corriente de:
J Є [-1.5,6] A/mm2
Figura 3.21: Fuerza neta generada por el cojinete axial superior frente a la densidad de corriente
A pesar de obtenerse cierto control sobre la fuerza atractiva con valores negativos
de corriente, probablemente la mejor opción para controlar la fuerza es trabajar en el
rango de corrientes positivas y obtener el efecto de la reducción de la fuerza atractiva
simplemente incrementando la corriente del cojinete inferior. En este caso, el rango de
corriente de trabajo será:
J Є [0,6] A/mm2
3 Sistema de guiado
191
3.3.4.3 Comportamiento dinámico
El dimensionamiento del sistema realizado hasta el momento permite regular las
fuerzas atractivas que se ejercen sobre la armadura a través de la corriente inyectada en
las bobinas dentro del margen especificado. Además, se ha diseñado el sistema de
imanes para que proporcionen el empuje necesario para sustentar el rotor en posición
de equilibrio y mantengan su punto de trabajo lo más cercano posible al punto de
BHmax.
Sin embargo, las dificultades técnicas que suponen emplear acero laminado para
mecanizar el material ferromagnético del sistema axial, añaden el problema de las
corrientes parásitas que afecta profundamente a los tiempos de establecimiento de las
fuerzas. Con objeto de paliar en la medida de lo posible este efecto, se han buscado
materiales de alta resistencia eléctrica, encontrándose buenas soluciones para
mecanizar la llanta de los cojinetes (Tabla 3.3). En lo que se refiere a la armadura móvil,
se requiere un material que combine alta resistencia mecánica y eléctrica, siendo
también deseables altos valores de saturación y permeabilidad magnética. Ambas
propiedades son críticas en el desempeño del sistema, pues una resistencia mecánica
insuficiente podría derivar en fallo del componente por fatiga, mientras que las
corrientes parásitas podrían hacer el sistema incontrolable. El mejor compromiso en
cuanto al material para las armaduras es un acero al Ni-Co de alta calidad empleado en
aplicaciones
aeroespaciales
con un
excelente comportamiento mecánico con
resistencias a rotura cercanas a los 2 GPa y un aceptable comportamiento magnético,
presentando una saturación de 1.7 T y una permeabilidad relativa máxima de 200. La
resistencia eléctrica se sitúa ligeramente por encima de los 40 µΩ cm.
El objetivo del presente estudio es cuantificar la constante de tiempo del sistema,
para poder incluir un retardo en el modelado de la planta que aproxime el modelo a la
realidad de la mejor forma posible.
En el diseño del sistema de control es deseable poder separar por una parte los
efectos transitorios debidos a la naturaleza inductiva de sistema y por otra a aquellos
debidos a la aparición de corrientes parásitas que dificultan la penetración del campo
en el material y el consiguiente retardo en la aparición de las fuerzas magnéticas. Para
poder modelar ambos efectos de forma independiente se ha sometido al electroimán a
un escalón de corriente y se ha analizado el comportamiento transitorio de la fuerza
3 Sistema de guiado
192
resultante. Como es sabido, es imposible aplicar un escalón de corriente a un circuito
inductivo, ya que se requeriría tensión infinita. Sin embargo, se puede suponer que se
dispone de un nivel de tensión suficientemente alto como para suponer que la
corriente se establece instantáneamente.
Figura 3.22: Respuesta transitoria de la fuerza neta sobre la armadura del cojinete axial superior en posición inferior
(x= -1 mm) excitando el devanado con un escalón de corriente de 6 A/mm2
Figura 3.23: Respuesta transitoria de la fuerza neta sobre la armadura del cojinete axial superior en posición de
referencia (x=-0 mm) excitando el devanado con un escalón de corriente de 6 A/mm2
3 Sistema de guiado
193
Figura 3.24: Respuesta transitoria de la fuerza neta sobre la armadura del cojinete axial superior en posición superior
(x=-1 mm) excitando el devanado con un escalón de corriente de 6 A/mm2
Se plantea la posibilidad de mejorar la respuesta dinámica del sistema trabajando
con un nivel de corriente de base que disminuya el efecto del incremento de flujo que
genera las corrientes parásitas. Visto de otro modo, la fuerza es función cuadrática del
flujo y por lo tanto de la corriente. Por lo tanto, la ganancia de fuerza se incrementa si
trabajamos con un nivel de corriente de base, aunque se derivan unas mayores
pérdidas del cojinete por efecto Joule.
Se han realizado simulaciones de la respuesta dinámica del sistema alimentando el
devanado con una corriente de base de 1 A/mm2 y excitándolo con el mismo escalón
de corriente de 6 A/mm2. Los resultados obtenidos muestran una mejora de las
constantes de tiempo.
Con objeto de ser conservadores, se plantea la situación más desfavorable para el
cálculo de la constante de tiempo. Esta situación se da para máximo entrehierro, es
decir, para un desplazamiento de x=1 mm.
3 Sistema de guiado
194
Figura 3.25: Respuesta dinámica de la fuerza sobre la armadura superior axial aplicando un nivel de corriente de base
de 1 A/mm2 y sometiendo al devanado a un escalón de corriente de 6 A/mm2 . Se puede apreciar la mejora
comparando esta respuesta con la obtenida en la Figura 3.22. En el caso de no alimentar el devanado con una
corriente de polarización de 1 A/mm2 se obtiene una fuerza neta de 1500 N a los 5 ms. Sin embargo, con la mejora
propuesta se alcanza en el mismo instante una fuerza de casi 2000 N, lo que representa una mejora de casi un 30%.
3.3.4.4 Parámetros eléctricos del devanado del cojinete superior
Obtenemos la resistencia óhmica del devanado como:
R=ρ
l
S
A partir del radio medio rmed y del número de espiras N se obtiene la longitud
como:
L=2πNrmed =133.7 m
N=140 espiras
Tomando una sección útil del conductor de Cu de S=2.24 10-6 m2 se obtiene la R
óhmica total:
R=1.49 Ω @T=100º C
3 Sistema de guiado
195
La inductancia del solenoide se obtiene a partir de la energía magnética E
almacenada en el sistema descontando la aportación de los imanes permanentes.
L=
2E
(J ⋅ S) 2
El valor obtenido para E alimentando el devanado con una densidad de corriente de
J=6 A/mm2 en posición de referencia x=0 mm resulta E=18.1 J, de donde se obtiene el
valor de la inductancia:
L=200 mH
3.3.5 Diseño del cojinete axial inferior
3.3.5.1 Dimensionamiento del sistema
La naturaleza altamente inestable de los imanes permanentes hace necesaria la
incorporación de un electroimán inferior que sea capaz de redirigir el sistema rotativo
a su posición de referencia en caso de que se aproxime a su posición extrema superior.
Por lo tanto, el requisito fundamental es que se tenga una fuerza suficiente para poder
controlar el rotor dinámicamente. Se ha establecido un valor de al menos 3kN de
fuerza neta disponible, aproximadamente igual al requerido para el electroimán
superior. El cálculo de las fuerzas se ha realizado siguiendo el mismo procedimiento
que se empleó en el caso del cojinete superior.
A continuación se presenta la distribución del campo y la fuerza neta resultante al
alimentar el devanado con una densidad de corriente de 6 A/mm2 en la posición más
desfavorable, dada para el mayor entrehierro, es decir, para x=1 mm.
3 Sistema de guiado
196
Distribución de la inducción magnética B
Figura 3.26: Distribución de B en el electroimán inferior para x=1 mm, j=6 A/mm2.
Como se puede apreciar, en estas condiciones la llanta del cojinete trabaja cerca de
la saturación, dada para B=1.5 T. Se ha escogido trabajar en el codo de la curva BH para
aprovechar al máximo el material y reducir volumen y peso.
Figura 3.27: Líneas de campo para x=1 mm, j=6 A/mm2.
3 Sistema de guiado
197
Cálculo de la fuerza magnética
Figura 3.28: Resultado de la integración del Tensor de Maxwell sobre la armadura inferior del sistema axial de
levitación
Como recordará el lector, el sistema de levitación es capaz de sustentar la totalidad
de la masa del rotor en la posición de referencia gracias a la fuerza generada por los
imanes permanentes. Sin embargo, en la situación que se analiza, el rotor se encuentra
desplazado verticalmente en la posición x=1 mm, con lo que la fuerza generada por el
cojinete superior es mayor que el peso y por tanto su resultante se dirige verticalmente
hacia arriba. A partir de las curvas de la Figura 3.20 se obtiene la mínima fuerza
atractiva que se puede generar con el cojinete superior en esta situación, que es de unos
1800N inyectando una corriente de valor -1.5 A/mm2. Por lo tanto, la fuerza neta
disponible para redirigir el rotor de la máquina a la posición de referencia será:
Fneta = (-5500+1800) = -3700 N
3 Sistema de guiado
198
3.3.5.2 Obtención de las curvas de fuerza frente a densidad de corriente para distintos
entrehierros
Al igual que se hizo con el electroimán superior, se han obtenido las distintas curvas
fuerza frente a densidad de corriente para un barrido de entrehierro a lo largo del
margen de operación del cojinete que oscila + - 1 mm sobre la posición de referencia
dada para un entrehierro de 2.6 mm.
1 mm
0.6 mm
0.2 mm
0.0mm
-0.2mm
-0.6 mm
-1 mm
Figura 3.29: Fuerza ejercida por el cojinete inferior en función de la densidad de corriente que circula por la bobina
para distintos valores de x correspondiente al margen de operación establecido.
3 Sistema de guiado
199
3.3.5.3 Comportamiento dinámico
Se ha realizado un estudio transitorio para estudiar el efecto de las corrientes
parásitas y poder cuantificar el tiempo de establecimiento de la fuerza magnética. El
estudio se ha realizado sometiendo al devanado del cojinete inferior a un escalón de
corriente de 6A/mm2 en sus dos posiciones extremas, dadas para un desplazamiento
de la armadura de +- 1 mm.
Figura 3.30: Respuesta transitoria de la fuerza sobre la armadura inferior del sistema axial generada por el cojinete
inferior ante un escalón de corriente de 6A/mm2 para máximo entrehierro (3.6 mm), x= 1mm.
3 Sistema de guiado
200
Figura 3.31 Respuesta transitoria de la fuerza sobre la armadura inferior del sistema axial generada por el cojinete
inferior ante un escalón de corriente de 6A/mm2 para posición de referencia del sistema (entrehierro=3.6 mm, x=
1mm).
Figura 3.32 Respuesta transitoria de la fuerza sobre la armadura inferior del sistema axial generada por el cojinete
inferior ante un escalón de corriente de 6A/mm2 para mínimo entrehierro entrehierro (3.6 mm), x= 1mm.
3 Sistema de guiado
201
A continuación se muestran los resultados obtenidos trabajando con un nivel de
corriente de base de 1 A/mm2
Figura 3.33: Figura 3.34: Respuesta transitoria de la fuerza sobre la armadura inferior del sistema axial generada por
el cojinete inferior ante un escalón de corriente de 6A/mm2 para máximo entrehierro (3.6 mm), x= 1mm y una
corriente de base de 1 A/mm2.
Esta situación supone el caso más desfavorable por lo que las contantes de tiempo
de trabajo serán las que correspondan al mismo siguiendo un criterio conservador.
3.3.5.4 Parámetros eléctricos del devanado del cojinete inferior
Siguiendo el mismo procedimiento que en el caso del cojinete superior y a partir de los
siguientes datos
Rmed=139 10-3 [m]
L=2πNrmed =160.7 [m]
N=184 espiras
Tomando una sección útil del conductor de Cu de S=2.24 10-6 m2 se obtiene la
resistencia óhmica total evaluada a 100ºC.:
3 Sistema de guiado
202
R=1.79 Ω @T=100ºC
La inductancia del solenoide se obtiene a partir de la energía magnética E
almacenada en el sistema.
L=
2E
(J ⋅ S) 2
El valor obtenido para E alimentando el devanado con una densidad de corriente de
J=6 A/mm2 en posición de referencia x=0 mm resulta E= 32.075 J, de donde se obtiene
el valor de la inductancia:
L=355 mH
3.3.6 Diseño conceptual del sistema de control del sistema axial de levitación
A partir del análisis del modelo del sistema axial desarrollado con EF se obtienen los
diferentes parámetros de los bloques del esquema de control del esquema. El control
consiste en un regulador PD. Los bloques correspondientes a las fuerzas que ejerce
cada uno de los cojinetes se modelan a partir de tablas de doble entrada (J,x) obtenidas
con las simulaciones presentadas en los epígrafes 3.3.4.2.4, pág. 189 y 3.3.5.2, pág. 198.
Las constantes de tiempo se evalúan a partir de las respuestas transitorias de cada
uno de los cojinetes en la situación más desfavorable dada para un desplazamiento de
x= -1 mm en el cojinete superior y x= 1 mm para el cojinete inferior.
Dado que la respuesta no es una exponencial exacta, obtendremos las constantes de
tiempo como el instante en el que la respuesta alcanza un valor de (1- 1/e) x valor en
régimen estable lo que resulta en los siguientes valores para el caso de no disponer de
corriente de base:
3 Sistema de guiado
203
τ s ≈ 8.5ms
τ i ≈ 8.5ms
La mejora trabajando con una corriente de base de 1 A/mm2 es la siguiente:
τ s ≈ 6.5ms
τ i ≈ 6.5ms
A continuación se muestra el esquema de control propuesto. El peso del rotor se ha
incluido en la función Fs(J,x).
Figura 3.35:: Esquema de control para el sistema axial de guiado
guiad
Para la medida del error se trabajará con un transductor de posición diferencial.
3 Sistema de guiado
204
3.4 Diseño conceptual de los cojinetes radiales
El sistema de guiado axial está compuesto por dos electroimanes con ocho polos
cada uno como se muestra en la Figura 3.36 colocados simétricamente con respecto al
plano ecuatorial del rotor. El sistema de fijación de la armadura móvil se describió en el
epígrafe 2.7.4.1, pág. 149. La parte fija del sistema consta de los dos núcleos octupolares
mostrados en la figura que van fijados anularmente sobre el bastidor de la máquina.
Figura 3.36: Diseño de los octupolos del sistema de guiado axial
El material empleado es acero magnético al Si con recubrimiento de Stabolit
semejante al empleado en el hierro de la máquina eléctrica y cuya curva BH y
propiedades magnéticas se pueden encontrar en el epígrafe 4.2.4, pág. 216.
La configuración de ocho polos con ocho bobinas concentradas abrazando cada uno
de los polos permite generar fuerzas en cuatro direcciones ortogonales de forma
independiente.
Las bobinas contiguas se conectarán en serie dos a dos y estarán alimentadas de
manera independiente. De esta forma, excitando los circuitos formados por cada par de
bobinas contiguas se genera una fuerza de atracción hacia la armadura dirigida en la
dirección de la bisectriz del ángulo formado por los ejes magnéticos de ambos
solenoides. De esta manera, se obtiene capacidad de control sobre el eje de rotación del
volante consiguiéndose mantenerlo en posición vertical en todo momento.
3 Sistema de guiado
205
Al igual que en el caso del sistema axial, se debe prever el fallo de estos cojinetes por
sobrecargas debidas a aceleraciones o frenados bruscos del tranvía. Para evitar la
destrucción de los cojinetes, al producirse una sobrecarga que produzca un
desplazamiento radial de más de 1.5 mm, la armadura del sistema axial entra en
contacto con los cojinetes de aterrizaje que se hacen cargo de mantener la separación
suficiente entre las armaduras de ambos sistemas de cojinetes, radial y axial, y sus
respectivos núcleos. A continuación se muestra en detalle el sistema de guiado de la
parte superior de la máquina:
Cojinete superior
de aterrizaje
Armadura
laminada del
cojinete radial
superior
Solenoide de uno
de los polos del
cojinete radial
superior
Núcleo laminado
del cojinete radial
superior
Figura 3.37: Detalle del sistema de guiado superior. Modelo axisimétrico.
3 Sistema de guiado
206
Gracias a la laminación tanto de las armaduras móviles como de los octupolos, se
consigue una respuesta dinámica mucho mejor que en el caso del sistema axial y por
tanto mejor capacidad de control.
Figura 3.38: Ajuste de los octupolos sobre el bastidor de la máquina. Se puede apreciar el hierro de la máquina
eléctrica y los cojinetes de aterrizaje situados en cada uno de los extremos de bastidor. El bastidor se ha diseñado
hueco de forma que se pueda instalar una superficie aleteada en su interior y refrigerar el sistema por convección
forzada instalando un pequeño ventilador en alguno de los extremos.
.
4
Máquina eléctrica
4 Máquina eléctrica
208
4 Máquina eléctrica
4.1 Introducción
La máquina eléctrica es el sistema encargado de transformar la potencia eléctrica
que recibe de la catenaria o del frenado regenerativo y transformarla en potencia
mecánica que se invierte en acelerar el volante de inercia. De esta manera, se consigue
almacenar grandes cantidades de energía en forma de energía cinética de rotación que
después se pueden recuperar invirtiendo la máquina eléctrica para que funcione en
modo generador.
Dada la geometría del sistema, se dispone de muy poco espacio para instalar la
máquina, razón por la cual se decidió instalarla en el interior del eje del rotor y poder
disponer así de mayor longitud para generar más par. Los requerimientos del sistema
son muy estrictos, no solo por razones de espacio y peso, sino por la necesidad de
poder alcanzar grandes tasas de recarga del dispositivo. Como se aproximó en el
capítulo introductorio (epígrafe 1.5.4, pág.40) a partir de las simulaciones
proporcionadas por el cliente, para cumplir el requisito de tiempo de recarga de 16 s,
es necesario disponer de una potencia (supuesta constante de 900 kW). En realidad la
máquina eléctrica proporciona par constante, por lo que la potencia que suministra o
recibe es función de la velocidad.
Otra de las especificaciones del dispositivo es su capacidad de almacenamiento de
energía, que debe estar en torno a 15 MJ útiles. Si tenemos en cuenta que el par
proporcionado por la máquina es constante, se sigue que a bajas velocidades la
potencia es muy reducida, aún disponiendo de un par elevado, lo cual es deseable
hasta cierto punto, pues grandes pares requieren de máquinas demasiado grandes y
pesadas. Por lo tanto, es necesario fijar un umbral de velocidad por debajo del cual la
máquina no debe operar en régimen normal. Buscando un compromiso razonable, se
fija una velocidad mínima de operación como la mitad de la velocidad máxima del
volante. Dicha velocidad máxima de giro del rotor viene impuesta por el requerimiento
de capacidad del sistema.
4 Máquina eléctrica
209
La energía útil del volante operando entre wmin y wmax se puede obtener a partir de
la siguiente relación:
E = E max (1 − s 2 )
Donde s se definió como el ratio entre la velocidad máxima y mínima del volante.
Por lo tanto, se tiene que wmin=wmax/2, ( s=wmin/wmax=0.5), con lo que la energía
disponible es un 75% de la total almacenada por el volante.
Como si se requiere una energía útil de 15 MJ, el volante debe almacenar 20MJ de
energía a máxima velocidad. El valor total de la inercia de la masa rodante está en
torno a los 20.5 kg m2, lo que aplicando la ecuación (1) proporciona un valor de wmax de
13333 rpm (1400 rad/s aprox.)
1
E = Iw2 (1)
2
A partir de la ecuaciones del movimiento circular uniformemente acelerado se tiene
que,
w(t ) = wmin + α ⋅ t (2)
Luego el tiempo de carga del volante se puede obtener como:
tc =
wmax
2 ⋅α
(3)
La ecuación fundamental de la dinámica de rotación expresa que,
∑ M = I ⋅ α (4)
Donde el sumatorio de momentos en el caso que se analiza se reduce al par T que es
capaz de desarrollar la máquina. Evidentemente, esto es cierto siempre que se
consideren despreciables las pérdidas aerodinámicas. Para evitar el efecto de estas
pérdidas que pueden llegar a ser muy elevadas a altas velocidades, se propone
sumergir la masa rodante en una atmósfera de vacío total o parcial con algún gas
menos denso que el aire.
4 Máquina eléctrica
210
Asumiendo pérdidas nulas y despejando en (3) y sustituyéndolo en (4) se obtiene
la siguiente expresión para el par electromecánico:
T =I
wmax
(5)
2 ⋅ tc
Si evaluamos (5) con el tiempo de carga requerido de 16 s, y los valores obtenidos
para J y wmax obtenemos el par necesario para cargar el dispositivo en el tiempo
especificado, lo que arroja un resultado de 897 Nm.
Este par implica una potencia activa máxima de la máquina eléctrica de:
Pmax = T ⋅ wmax = 1.25MW
Si tenemos en cuenta que se dispone de 200 mm de altura y de un diámetro de 360
mm para instalar la máquina se deduce que es necesaria una elevadísima densidad de
potencia para la máquina.
En resumen, los requisitos de densidad de potencia, ruido y vibraciones, junto con
el hecho de que las máquinas de inducción tienen pérdidas rotóricas muy elevadas a
altas velocidades hacen pensar que la mejor opción para diseñar la máquina eléctrica es
una máquina síncrona trifásica de imanes permanentes. El requisito de tiempo de carga
es muy restrictivo y parece difícil de alcanzar. Se diseñará la máquina de forma que se
optimice al máximo su potencia, con objeto de reducir los tiempos de carga del
dispositivo.
4.2 Geometría de la máquina
La geometría de la máquina se debe ajustar al espacio disponible en el espacio
interno del eje hueco del rotor. Teniendo en cuenta el espacio necesario para poder
instalar el sistema de guiado, se dispone de 200 mm en altura. El radio interno de 180
mm restringe el diámetro de la máquina a 140 mm, teniendo en cuenta el espacio
4 Máquina eléctrica
211
ocupado por los imanes permanentes, que van en la cara interna de la superficie del eje
del rotor y el entrehierro previsto, que supone una separación adicional de 5 mm. Este
elevado valor del entrehierro, que sería inadmisible para cualquier otro tipo de
máquina, es posible cuando se trata de una máquina de imanes permanentes, pues el
flujo magnético se debe casi exclusivamente a la aportación de los imanes.
Otra de las particularidades de esta máquina es que puede trabajar sin hierro. El
campo remanente de los imanes es tan alto que son capaces de establecer un flujo
magnético considerable aún
sin disponer de un circuito magnético, aunque
evidentemente la incorporación de hierro mejora el funcionamiento de la máquina.
4.2.1
Caja de aislamiento en fibra de vidrio
Se propone que la máquina no trabaje
en la misma atmósfera de vacío que el
volante
de
inercia
para
mejorar
su
comportamiento térmico y poder trabajar
con
ACANALADURAS
PARA JUNTAS
TOROIDALES
mayores
maximizándose
valores
de
corriente,
así
la
potencia
desarrollada y minimizándose los tiempos
de recarga del volante. Para tal efecto se ha
diseñado una caja de fibra de vidrio de 3
mm de espesor de pared que sea capaz de
separar herméticamente la vasija de vacío
en la que está sumergido el rotor/volante y
el sistema de guiado, del espacio dispuesto
Figura 4.1: Caja de fibra de vidrio para aislar la
para la máquina. De esta manera, además
máquina eléctrica de la vasija de vacío
de mejorarse la evacuación de calor, se
dispone de un estupendo aislante que
protege los devanados de la máquina de posibles arcos eléctricos hacia otros
componentes del sistema. Para evitar problemas de presurización y conseguir un
hermetismo perfecto, se ha provisto a la caja con una serie de acanaladuras en las zonas
4 Máquina eléctrica
212
de unión con las tapas y con el eje donde se instalarán juntas tóricas diseñadas para
evitar fugas de presión.
4.2.2
Disposición de los imanes
La disposición de los imanes forma una red Halbach circular con la que se consigue
un campo magnético muy potente aproximadamente senoidal a lo largo de la periferia
de la máquina. Para soportar los esfuerzos electromecánicos que tienden a empujar los
imanes hacia el estator de la máquina, se ha diseñado una configuración circular de los
mismos de tipo arco romano.
La red Halbach consiste en una
disposición de imanes permanentes en
los que se va rotando el eje magnético de
cada imán a saltos discretos para
conseguir una distribución de campo
Figura 4.2: Funcionamiento de la matriz Halbach
(Wikipedia.http://en.wikipedia.org/wiki/Halbach_array)
nula
en
el
exterior
y
un
campo
potenciado en el interior. Idealmente, el
campo interior es el doble que el
producido por cada imán independiente como se puede apreciar en la Figura 4.2.
La disposición de los imanes en la
superficie interna del eje del rotor y el
campo B generado se muestra en la
. Los momentos magnéticos de los
imanes se han rotado a saltos discretos
de 67.5º dando como resultado un
cuadrupolo
magnético.
Se
puede
apreciar la forma trapezoidal de los
imanes con la que se consigue soportar
las fuerzas atractivas entre los imanes y
el hierro de la máquina.
Figura 4.3: Red Halbach del rotor de la máquina y campo
magnético generado.
4 Máquina eléctrica
213
Br[T]
Figura 4.4: Campo radial en el entrehierro en función el ángulo mecánico a la largo del perímetro de media máquina
Hr[Av/m]
Figura 4.5: Fuerza magnetomotriz radial en el entrehierro en función del ángulo mecánico a lo largo del perímetro de
media máquina
Respecto al montaje del sistema de imanes, se debe prever un utillaje que sea capaz
de soportar las enormes fuerzas magnéticas que tienden a deshacer la configuración
Halbach y alinear los momentos magnéticos de los imanes que la componen. El
montaje es sin duda complejo y merece un estudio detallado de la técnica y el utillaje a
aplicar. Se ha pensado en emplear dos mandrinos expansibles que soporten la matriz
Halbach por los extremos y permitan encintar exteriormente el sistema de imanes con
4 Máquina eléctrica
214
fibra de vidrio. Una vez se realice el encintado, se puede desmontar la matriz de los
mandrinos y continuar con el encintado completo de la superficie externa de los
imanes. Finalmente, se realizaría un mecanizado para obtener una superficie
suficientemente uniforme para acoplar el sistema de imanes en el interior del volante
de inercia con algún adhesivo apropiado.
4.2.3 Estator
Las limitaciones geometrías para la envolvente del sistema y la necesidad de
almacenamiento de energía no hacen posible instalar una máquina síncrona
convencional con rotor interno al estátor, pues las dimensiones requeridas para el
volante no dejarían espacio para montar una máquina convencional de potencia
suficiente sobre el eje.
La solución propuesta consiste en diseñar una máquina en la que el estator sea
interno. De esta manera, se puede incorporar el rotor de la máquina eléctrica al propio
volante de inercia, fijando la red Halbach en la superficie interna del eje del rotorvolante. Las fuerzas centrífugas que sufren los imanes debidas a la rotación son
soportadas por propio eje del volante como se estudió en el capítulo 2. Por su parte, las
fuertes fuerzas atractivas de los imanes hacia el estator se soportan gracias a la
conjuración en arco romano de los imanes. En este punto se recuerda que al realizar el
diseño mecánico del eje del rotor, se consideró que los imanes generaban un empuje
radial centrífugo sobre la superficie interna del eje del volante. Sin embargo, esto no es
del todo cierto, pues no se consideró el efecto compensatorio que tienen las fuerzas de
atracción magnética. Sin embargo, este modelo supone un margen de seguridad
adicional en el diseño, pues aunque no se ha cuantificado, las cargas radiales que
sufrirá el eje se ven sin duda reducidas por el efecto de atracción magnética.
El estator se ha diseñado para una máquina de cuatro polos. Gracias a este diseño,
se consigue un campo magnético más periférico que en el caso de una máquina de un
par de polos y se puede prescindir del hierro del centro del estator. De esta manera, se
consigue aligerar el diseño a la vez que se dispone de un hueco a través del cual se
puede evacuar el calor generado instalando una superficie aleteada y refrigerando por
4 Máquina eléctrica
215
convección forzada. Incrementar el número de polos por encima de cuatro mejoraría
esta situación, permitiendo eliminar algo más de hierro. Sin embargo, el número
óptimo de polos se ha fijado en cuatro por las pérdidas de conmutación asociadas a la
electrónica de potencia. Si tenemos en cuenta que:
f =
n⋅P
60 (6)
Incrementar el número de pares de polos en una unidad supone doblar la frecuencia
eléctrica de alimentación a la máquina. Como se parte de una máquina muy rápida,
(n=13.333 rpm), aumentar el número de polos implicaría trabajar con unas frecuencias
muy elevadas con las consiguientes pérdidas o empeorar la calidad de la onda senoidal
de tensión.
El
diseño
del
estator
consta de 32 ranuras. Se
tienen 12 ranuras por fase
distribuidas
tripletes
en
cuatro
separados
180º
eléctricos como se aprecia en
la donde se ha representado
la
fase
superior
A.
Los
e
tripletes
inferior
corresponden a la fase A
positiva (corrientes salientes
del plano del papel), mientras
que los tripletes izquierdo y
derecho representan la fase A
Figura 4.6: Chapa estatórica y devanados de la fase A
negativa.
4 Máquina eléctrica
4.2.4
216
Materiales aplicados
Los materiales empleados en la construcción de la máquina consisten en imanes
permanentes de NdFeB con las mismas características que los empleados en el diseño
del cojinete axial superior. El núcleo magnético está compuesto por chapa magnética
apilada de acero con Stabolit, cuya curva BH se presenta en la ¡Error! No se encuentra
el origen de la referencia. .Los devanados serán de cobre.
Figura 4.7: Curva BH para la chapa magnética del estátor. Acero al Si con
recubrimiento de Stabolit. Como se puede apreciar en la figura el codo de
saturación de la curva se situa en torno a 1.5 T, por lo que éste será el valor de
trabajo del material para aprovec
Br
Hc
Bm
Hm
BHmax
Hci
1.032
-749.3
0.513
-378.3
194 103
-968.5
T
kAv/m
T
kAv/m
J/m3
kAv/m
Tabla 4.1: Valores de trabajo de los imanes de NdFeB N35UH a 120ºC.
El diseño a buscado que el punto de trabajo de los imanes se sitúe lo más cercano
posible a su punto de máxima densidad de energía.
4 Máquina eléctrica
217
4.3 Cálculo del par
Como se ha comentado anteriormente, gracias al potente campo magnético que es
capaz de establecer la matriz Halbach de imanes permanentes, se puede operar la
máquina con un entrehierro elevado de 5 mm. Al prescindir parcialmente de un
circuito magnético completo para el flujo de la máquina, la contribución al campo total
de la corriente de los devanados es despreciable. Sin embargo, a partir de la ecuación
general del par entre dos campos magnéticos (7), se puede observar que disponiendo
de un valor elevado del campo de excitación generado por el rotor se puede obtener un
par considerable, a pesar de que el campo generado por el rotor sea bastante menor.
T = Brot × Best × Sen(θ ) (7)
Con objeto de maximizar todo lo posible el par de la máquina, se propone un
control vectorial cercano a los 90º.
Por otra parte, la presencia de este gran entrehierro permite confinar la máquina en
una carcasa de fibra de vidrio (descrita en Figura 4.1, pág. 211), lo cual permite
mejorar la evacuación de calor y la consiguiente operación de la máquina con mayores
valores de corriente y por tanto de par. Además de esta mejora, se obtiene un buen
aislamiento eléctrico entre las bobinas-hierro del estator y demás elementos del sistema
con lo que se aumenta el margen de seguridad del sistema.
El par electromecánico se ha calculado a partir del Tensor de Maxwell en
coordenadas polares que toma la siguiente forma:
T=
rgap
L ⋅ µ0
∫
2π
0
Br Bθ ⋅ ds (8)
Donde rgap es el radio del entrehierro (rgap=142.5 mm y L la longitud vertical de la
máquina. La integración de la ecuación (8) se realiza numéricamente a partir de la
solución del campo obtenida con el modelo de EF de la máquina. Se ha fijado la
corriente máxima en 4 A/mm2 eficaces. El resultado de la integración (8) a lo largo de
una trayectoria circular de radio rgap se muestra en la Figura 4.8.
4 Máquina eléctrica
218
Figura 4.8: Integración del tensor de Maxwell para el cálculo del par electromagnético con una corriente eficaz de
4A/mm2
T=500 N.m
No debemos perder de vista que el modelo de EF de la máquina se basa en un modelo plano que por lo tanto desprecia
el efecto de los extremos de la máquina por lo que el valor del par calculado representa un valor optimista del par real
que puede desarrollar la máquina que será algo menor
En la figura se muestran las líneas de
campo
alimentando
la
máquina
con
corriente máxima (4 A/mm2). Como se
puede apreciar las líneas de campo sufren
una leve distorsión con respecto a las que
obtuvimos con la máquina en vacío (Figura
4.3, pág. 212).
Figura 4.9 : Líneas de campo magnético para la máquina
alimentada con corriente máxima (4A/mm2)
4 Máquina eléctrica
219
Figura 4.10: Campo magnético con la máquina a plena carga.
Valor instantáneo de las densidades de corriente de fase:
Fase A=0 A/mm2
Fase B=4√?Sen(-2π/3)=-4.9 A/mm2
Fase C=4√?Sen(+2π/3)=+4.9 A/mm2
En esta situación, los máximos y mínimos de los campos magnéticos giratorios se
alinean con las bisectrices de los cuatro cuadrantes del plano.
4.4 Potencia activa máxima desarrollada por la máquina
El cálculo de la potencia máxima de directo a partir del valor del par obtenido.
Como la máquina trabaja con par constante, la situación de máxima potencia se dará
para máxima velocidad y tiene el siguiente valor:
4 Máquina eléctrica
220
Pmax=700 kW
A la mínima velocidad de operación en régimen de trabajo (wmin=wmax/2, s=1/2) la
potencia se reduce hasta el valor de 350 kW.
4.5 Tiempo de recarga del sistema
A partir del valor calculado del par en el epígrafe 4.3, pág. 217, y de la ecuación (5),
se puede obtener el valor del tiempo mínimo de recarga del dispositivo como sigue.
Despejando el tiempo de recarga tc en (5) se obtiene la siguiente expresión:
tc = I
wmax
2⋅T
Sustituyendo valores se obtiene un resultado de:
tc=28.8 s
El resultado obtenido no cumple el requerimiento de tiempo de recarga de 16 s
buscado por el cliente. Sin embargo, teniendo en cuenta que se trata de un primer
prototipo de la máquina y que las limitaciones de espacio para el dispositivo son muy
restrictivas, podemos afirmar que es un valor más que satisfactorio.
Si se tienen en cuenta las dimensiones de la máquina se puede obtener la densidad
volumétrica de potencia del motor/generador. El volumen de la máquina incluyendo
el eje del rotor/volante donde van fijados los imanes resulta ser de aproximadamente
22 dm3. Por lo tanto el ratio obtenido para la densidad volumétrica de potencia activa
máxima es el siguiente:
4 Máquina eléctrica
221
ρ VP ≈ 32
MW
m3
Este elevado valor proporciona una idea de la alta potencia de este tipo de
máquinas que sin duda la mejor opción para aplicaciones como la que se trata, en las
que es necesario obtener grandes densidades de potencia debido a las restricciones de
espacio y peso para del sistema.
4.6 Punto de trabajo de los imanes permanentes
A continuación se evaluará el campo desmagnetizante máximo que puede existir en
los imanes, para comprobar su robustez ante la desmagnetización. En la Figura 4.10 se
puede apreciar la corona de imanes permanentes en la periferia del dibujo. La
orientación del momento magnético da cada uno de ellos está rotado 67.5º con respecto
al que presentan sus vecinos contiguos. Existen cuatro imanes magnetizados
radialmente cuyos ejes magnéticos se localizan en las bisectrices de cada uno de los
cuadrantes del plano. Dichos imanes serán los que sufran mayores campos
desmagnetizantes, que serán críticos cuando el máximo del campo magnético giratorio
se alinee con ellos en su movimiento de rotación.
La situación descrita coincide
con la mostrada en la Figura
4.10, y por lo tanto, supone la
peor situación posible para los
imanes.
A
continuación,
se
muestra el valor del campo
desmagnetizante
a
que
está
sometido el imán posicionado en
la bisectriz del primer cuadrante.
Figura 4.11: Campo desmagnetizante máximo en los imanes del rotor.
4 Máquina eléctrica
222
Se observa que se tiene un valor máximo de -789.5 kA/m que es inferior al campo cohercitivo intrínseco del material
dado para Hci=-968.5 kA/m (Tabla 1.16, pág. 216). El coeficiente de seguridad para la desmagnetización presenta un
valor un valor de 1.23, lo que se considera un límite técnico infranqueable. Los resultados obtenidos en la Figura 4.10
y la ¡Error! No se encuentra el origen de la referencia. evidencian que el sistema está trabajando al límite de sus
posiblidades, por lo que se considera que no se puede conseguir una máquina de mayor potencia sin sobredimensionar
el sistema.
4.7 Devanados. Número de conductores por ranura
El par proporcionado por la máquina es función de la densidad de corriente que
circula por los devanados del estator. Sin embargo, el número de conductores por
ranura es el que define la tensión de vació de la máquina. Como se dispone de un bus
DC de 1000 V, se debe procurar que la tensión inducida en las fases se aproxime al
máximo a este valor para simplificar el sistema de potencia.
El cálculo de la tensión de vacío de la máquina se puede calcular a partir de la ley de
inducción de Faraday como se expone a continuación:
V =−
∂Φ
∂t
Donde representa el flujo abrazado por cada fase. El cálculo del flujo concatenado
por cada fase se puede calcular a partir del potencial vector magnético A aplicando el
teorema de Stokes a la ecuación del flujo abrazado por un circuito.
Φ = ∫∫ B ⋅ dS
La inducción B se puede obtener a partir de A,
B = ∇× A
Por lo tanto, aplicando el teorema de Stokes se tiene que:
Φ = ∫∫ (∇ × A) ⋅ dS = ∫ A ⋅ dl
4 Máquina eléctrica
223
Salvo en los extremos, B solo tiene componentes en el plano perpendicular al eje de
la máquina, A está orientado colinealmente con el eje y podemos obtener el flujo
resolviendo la integral de línea de la ecuación anterior a partir del valor del potencial
vector en el centro de cada ranura.
Una vez calculado el flujo de pico concatenado por fase, derivamos la expresión
temporal del flujo:
(t)= pSen(welec t)
V(t)=-d/dt=-p welec Cos(welec t)
El valor eficaz de la tensión de fase será:
Vrms =
Φ p ⋅ welec
2
Para máxima corriente eficaz (4 A/mm2) y máxima velocidad (wmax=13.333 rpm), se
obtienen los siguientes resultados para distintos números de conductores por fase.
Nº de conductores
por ranura
1
2
3
4
5
gp / fase
[Wb]
109.31 103
218.62 103
327.93 103
437.24 103
546.55 103
welec máxima
[rad/s2]
2792
2792
2792
2792
2792
Vrms fase
[V]
215.8
431.6
647.4
863.2
1079
Tabla 4.2: Tensión de vacío inducida en la máquina para distinto número de conductores por ranura. Máquina a
plena carga J=4A/mm2, w=13.333 rpm.
A partir de los valores obtenidos en la tabla anterior se determina diseñar la
máquina con tres conductores por fase. De esta forma, podremos trabajar con el PWM
en todo el margen de velocidades de trabajo de la máquina sin necesidad de
sobremodulación.
4 Máquina eléctrica
224
Figura 4.12: Bloque del motor.
Se puede apreciar la disposición de tres conductores en cada ranura. Los
conductores se han dispuesto con diferentes longitudes de forma que las
uniones entre las cabezas las bobinas ocupen el mínimo espacio posible
distribuyéndose en tres alturas. Las cabezas de las bobinas no se
muestran en la figura. Se propone una conexión de las bobinas por medio
de conductores planos curvados a modo de pletinas y atornillados en el
centro de los conductores para optimizar al máximo el espacio disponible.
5
Diseño final
5 Diseño final
226
5 Diseño final
5.1 Parámetros generales del sistema
A continuación se expone un pequeño resumen de los parámetros de
funcionamiento del sistema:
Parámetros generales del sistema
Masa total
650
kg
Potencia activa máxima nominal
700
kW
Par máximo nominal
500
Nm
Corriente nominal (rms)
250
A
Tensión nominal BUS DC
1000
V
Tensión nominal/fase
650
V
frecuencia nominal
0-450
Hz
Energía máxima
20
MJ
Energía útil (s=0.5)
15
MJ
Velocidad de operación
700-1400
rad/s
Inercia del volante
20.5
kg m2
Masa del volante
310
kg
Tiempo mínimo de recarga
30
s
Tabla 5.1: Parámetros generales del sistema
5 Diseño final
227
5.2 Vistas principales
Figura 5.1: Vista isométrica del sistema
Figura 5.2: Vista en planta
5 Diseño final
228
Figura 5.3: Alzado
Figura 5.4: Perfil
5 Diseño final
229
Figura 5.5: Sección axial de la máquina completa.
5.3 Carcasa y sistema de sustentación giroscópico
Figura 5.6: Blindaje de seguridad y vasija de vacío.
5 Diseño final
230
Figura 5.7: Sección de la carcasa con el sistema de sustentación.
5.4 Volante de inercia
Figura 5.8: Volante de inercia.
5 Diseño final
231
Figura 5.9: Sección axial del volante de inercia/rotor.
5.5 Bloque del motor
Figura 5.10: Bloque del motor.
5 Diseño final
232
Figura 5.11: Sección axial del bloque del motor desvestido de imanes.
Figura 5.12: Vista isométrica del bloque completo del motor seccionado axialmente.
5 Diseño final
233
Figura 5.13: Semisección del volante.
Anexos
A
Bibliografía
A Bibliografía
236
Bibliografía
Aluminum Association, I. (s.f.).
Boyer, E. (1986). Atlas of Fatigue curves.
Eylon, & Santner. (1979).
Gabrys C.W, B. C. (1994). Fabrication of Tick Filamente Wound Carbon Epoxi Ring
Ussing in situ curing. Lancaster.
Genta, G. (1985). Kinetics Energy Storage: Theory and Practice of Advanced
Flywheel Systems. London, Butterworhs & Co, Ldt 1985.
Ha. (2001).
Jahn, & Luo. (1988).
Jhan, & Luo. (1988).
Kitade. (2000).
MatWeb. (s.f.).
Monsalve. (2003). Evaluación a fatiga rotatoria del aluminio 2024-T3. Anales de
mecánica de la fractura, Vol. 20 .
Osgood. (1982).
Valencia. (2003). DETERMINACIÓN DE LAS CURVAS S-N- P EN FATIGA
ROTATORIA DE LAS. jornadas SAM/CONAMET/Simposio materia2003.
VanOrden. (1979).
Verma. (1997).
Verma. (2001). Study of fatigue behaviour of 7475 alluminium alloy.
A Bibliografía
237
Análisis de Fatiga en Máquinas
Rafael Avilés
Ed : Thomson
Elementos de Máquinas
Bernard J. Hamrock
Bo Jacobson
Steven R. Schmid
Ed : Mc Graw Hill
Atlas of Fatigue Curves
Howard E. Boyer
Ed : American Society for Metals
4ª Edition illustrated
ASM Internacional, 1986
ISBN 0871702142, 9780871702142
Análisis y Diseño de Volantes de Inercia de Materiales Compuestos
Lluís Ripoll Masferrer (2005)
Thermo – Mechanical Fatigue Analysis Using Generalized Continuum Damage
Mechanics and Finite Element Method.
Internacional Journal for Numerical Methods in Engineering (Aceptado para ser
publicado)
Oller, S. 0. Salomón y Oñate (2001).
Introducción a la Ciencia e Ingeniería de los Materiales
William D. Callister, Pere Molera Solà, Marc J Anglada Gomila
Colaborador Pere Molera Solà, Marc J Anglada Gomila
Edition: Illustrated
Publicado por Reverte, 2000
ISBN 8429172548, 9788429172546
Superplastic Forming Applications to Bomber Aircraft
A Bibliografía
238
C. Bampton, F. Mc Quilkin and G. Stacher
In Superplastic Forming
Suphal P. Agrawal
Ed : American Society for Metals
Determinación de las Curvas SNP en la Aleación de Aluminio 7075-T7351 Sometida
a Tratamiento Superficial de Anodizado.
A. Monsalve, M. Páez, M. Toledano, R. Parra, Y. Sepúlveda, N. Valencia
Study of fatigue Behaviour of 7475 Aluminium Alloy
B.B. Verma, J.D. Atkinson, M. Kumar
Anales de Mecánica de la Fractura Vol.20 (2003)
Evaluación a Fatiga Rotatoria de Aluminio 2024-T3
N. Valencia, A. Monsalve, M. Páez, Y. Sepulveda
Jornadas SAM / CONAMET / Simposio Materia 2003 07-16663
Determinación de las curvas SNP en fatiga rotatoria de las aleaciones de aluminio
2024-T3 y T7351 y su dependencia con los tratamientos superficiales
N. Valencia, R. Parra, A. Artigas, Y. Sepúlveda, M. Páez, M. Toledano,
Monsalve
Kinetics Energy Storage: Theory and Practice of Advanced Flywheel Systems
G. Genta
London: Butterworhs & Co., Ltd 1985
Flywheels; Comprehensive Composite Materials, Vol.6.29
Elsevier Kitade
Ed : Science Ltd (2000)
Composite Material Flywheels and Containment Systems
Energy and Tech. Rev. L.L.N.Lab., March 1982, p. 18-29
Kulkarni S. V.
A.
A Bibliografía
239
Theory of Elasticity
Timoshenko S., Goodier J. N.;
Ed : Mc Graw-Hill, New York (1970)
Microestructure Lectures
Ronal. D Kriz
Virginia Polytechnic Institute and State University, Blacksburg, Virginia 24061
Tomo D : Materials data for cyclicloading
Boller y Seeger T
Ed : Elsevier, 1987
Handbook of Aluminium : Alloy Production and Materials Manufacturing
George E Totlen, D. Scott
Ed : Illustrated
Resistencia de Materiales
Luis Ortiz Berrocal
Ed : Mc Graw Hill
Mecánica Vectorial para Ingenieros
Dinámica, Sexta edición
Ferdinand P. Beer, E. Russell Johnston Jr.
Ed : Mc Graw Hill
Fabrication of Tick Filament Wound Carbon Epoxy Ring Ussing In-Situ Curing:
Manufacturing and Quality; Conf. American Society
for Composites. Technomic. Lancaster. PA. 1994. p. 1090-1097
Gabrys C. W., Bakis C. E.
Design and Testing of Composite Flywheel Rotors
ASTM STP 1242 (1997) p. 1-22
Gabrys C. W., Bakis C. E.
A Bibliografía
240
Simplified Analysis of Residual Stresses in In-Situ Cured Hoop-Wound Rings;
Journal of Composites Material, Vol. 32, No 13/1998
Gabrys C.W., Bakis C. E.
Optimum Design of Thick-Walled Composite Ring for an Energy Storage System,
Journal of Composite Materials (1998), 32(9), p. 851-73
Ha S. K., Jeong H. M., Cho Y. S.
Optimal Design of Hybrid Composite Flywheel With a Permanent Magnet Rotor;
Journal of Composite Materials (1999), 33(16), p. 1544-75
Ha S. K., Yang H. I., Kim D. J.
Optimum Design of Multi-Ring Composite Flywheel Rotor Using a Modified
Generalized Plane Strain Assumption; International Journal of Mechanical Sciences
43 (2001), p. 993-1007
Ha S.K., Y Ha S. K., Yang H. I., Kim D. J.
Flywheels; Comprehensive Composite Materials, Vol.6.29, Elsevier Science Ltd
(2000)
Kitade
B
Planos
Planos
Al final del documento se presentan cuatro planos del sistema:
A. SECCIÓN DE CONJUNTO. Plano general de despiece de la máquina.
Formato DIN A2
B. VISTAS PRINCIPALES. Sección axial de la máquina y corte por el plano
ecuatorial. Vista isométrica. DIN A0
C. SISTEMA AXIAL DE LEVITACIÓN. Sección de revolución de los cojinetes
axiales superior e inferior. Formato DIN A3
D. IMÁGENES Y VISTAS DEL SISTEMA Y SUS COMPONENTES. Formato
DIN A1
Agradecimientos
A Julio Lucas Torralba y Aitor Echeandía por darme la oportunidad de trabajar en
este bonito proyecto.
A Felix Asensio por su paciencia y colaboración con el diseño gráfico.
A Enrique Ruiz de Villa por sus estupendos consejos ingenieriles y su paciencia
como instructor en elementos finitos.