filtro analogico de mediana con adaptación difusa
Anuncio

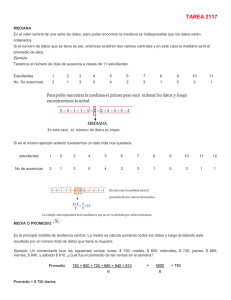
FILTRO ANALOGICO DE MEDIANA CON ADAPTACION DIFUSA Alejandro Díaz Sánchez y Javier Lemus López Instituto Nacional de Astrofisica, Optica y Electronica Luis Enrique Erro # 1. Tonantzintla, Puebla. Instituto Tecnológico de Puebla Av. Tecnológico 420, Puebla, Puebla, México e-mail: [email protected], [email protected] RESUMEN Se describe la realización de un filtro analógico de mediana con adaptación basada en lógica difusa. La celda básica del sistema es un comparador de transconductancia, cuya corriente de saturación actúa como operador local de pesado. Se enfatiza en la simplicidad de los circuitos para su aplicación en procesamiento de imágenes. Todas las simulaciones fueron realizadas en Tspice, utilizando el modelo BSIM3.2 del transistor MOS para una tecnología de 1.5 ? m de MOSIS. 1. INTRODUCCION El uso de filtros de mediana para la remoción de ruido no aditivo de alta frecuencia es el más frecuentemente utilizado en procesamiento de imágenes y señales. Debido a las características no lineales de este tipo de filtros, su eficiencia es mejor que la ninguna otra técnica de filtrado conocida [1]. La mediana de una secuencia de datos es definida como el elemento para el cual el mismo número de datos tiene valores por encima y debajo de este. Es decir, si la secuencia fuera ordenada por su valor, la mediana se encontraría a la mitad de la secuencia resultante. Por ejemplo, en la secuencia X={1, 25, 4, 16, 9}, la mediana seria el número 9. En el caso de secuencias con un número impar de elementos, la mediana es siempre un elemento de la secuencia. En el caso de secuencias con un número par de elementos, la mediana estará dada por la media aritmética del par de datos que se encuentran a la mitad de la secuencia ordenada [2]. Los filtros de mediana utilizan una ventana que se mueve sobre el conjunto de datos a procesarse, reemplazando el dato original con la mediana obtenida a partir del dato original y los que se encuentran en una vecindad determinada. A pesar de su popularidad, las realizaciones digitales en tiempo real de filtros de mediana tienen un costo computacional muy alto [3]. Esto se debe a la operación de ordenamiento requerido para cada dato. Algunos trabajos en realizaciones de filtros de mediana han sido reportados recientemente [4, 5]. Su simplicidad en la realización, bajo consumo de potencia y flexibilidad, permiten un alto grado de paralelismo en el cómputo de la mediana en aplicaciones que así lo requieran. 2. FILTROS DE MEDIANA CON PESO Propuestos originalmente por Edgemore [6], y propuestos por Justusson para el procesamiento no lineal de señales [1], los filtros de mediana con pesado han captado una alta aceptación en aplicaciones de procesamiento. Considerados como una generalización del filtro de mediana clásico, este tipo de filtros tiene excelentes características en la preservación de detalles y remoción de ruido. Los filtros de mediana con pesado pueden ser definidos en función de un estimador ? que minimiza la norma L1 del peso, de forma que: N ? wi xi ? ? ? min ...(1) i? 1 donde {xi} es el vector de entrada valorado en forma continua, y {wi} es el vector de pesos correspondiente. La minimización de esta función lleva a la forma explícita de filtros de mediana con pesado, la cual esta dada por la expresión: ? ? median(w1? x1, w2? x2 ,...,wN ? xN ) ...(2) donde med(? ) es el operador clásico de mediana, y ? indica la multiplicidad de cada elemento de la secuencia, de modo que: w ? x ? x, ..., x w times ...(3) A pesar de ser haberse considerado a los coeficientes de peso como de valores exclusivamente enteros [7], trabajos reciente han demostrado que estos pueden tomar valores reales [8], lo cual facilita la utilización de esquemas de adaptación clásicos como un método para encontrar el estimador ? . Los filtros adaptivos de mediana son utilizados en la remoción de ruido en ambientes con un alto grado de corrupción. La figura 1 muestra el diagrama general de un filtro adaptivo de mediana, la cual describe dos trayectorias de adaptación: la trayectoria hacia delante (FF), y una trayectoria de retroalimentación (FB). En la presente aplicación solamente será utilizada FF para realizar la adaptación. En el detector de máximo, se convierte cada corriente a comparar en voltaje, dominando la corriente de mayor valor, la cual es copiada a la salida del detector. Esta corriente es única para un grupo de pixeles involucrados en el calculo de la mediana, y es comparada en cada uno de estos datos para establecer su diferencia con respecto al valor máximo en el grupo, la cual ser utilizada para establecer la respectiva corriente de saturación Ib en la figura 1. 5. RESULTADOS 3. EL CIRCUITO DE MEDIANA La figura 2 muestra un comparador de transconductancia, el cual es utilizado para realizar el circuito de detección de mediana [4]. La corriente Ib es utilizada para aplicar el peso a la entrada no lineal. La conexión de varios de estos comparadores, en la forma que se muestra en la figura 3, permite que aquellos que reciban voltajes por encima del voltaje de mediana se + saturen positivamente con una corriente Isat , mientras los que reciben voltajes por debajo del voltaje de mediana se saturaran en forma negativa Isat . De esta forma, la suma de las corrientes a la salida será expresada como: ?i I out ? i ?j I out ? ? I out j med ... (4) En el caso de que la suma de las corrientes de saturación positiva sea igual a la suma de corrientes de saturación negativa, Isatmed, será igual a cero. En caso contrario, el comparador correspondiente a la corriente Isatmed proporcionara una corriente de compensación para estabilizar la salida. 4. EL CIRCUITO DE ADAPTACION El uso de la lógica difusa en sistemas adaptivos ha sido reportado recientemente en la literatura especializada. A pesar de esto, la circuitería involucrada en realizar la adaptación es demasiado elaborada y aun ocupa un área en silicio demasiado grande. Una de las grandes ventajas de utilizar el lazo FF para realizar una adaptación anticipada es la optimización del sistema sobre la base de características locales de la señal, en lugar de la respuesta global del sistema, permitiendo una reducción significativa en la complejidad de la red de adaptación. La figura 4 muestra el generador de la función de membresía, el cual establece la distancia relativa de cada pixel con respecto a un voltaje de referencia. Este circuito genera dos pares de corrientes diferenciales las cuales, al sumarse en los transistores de carga, producen la corriente de respuesta que se muestra en la figura 5. Dicha corriente es transmitida a través de un espejo de corriente a la etapa de detección de máximo, la cual es mostrada en la figura 6. La figura 8 muestra los resultados para un filtro de mediana con tres entradas, el cual consiste de tres comparadores de transconductancia conectados a un nodo de salida común. Cada uno de los transconductores utiliza una función de membresía para determinar su pertenencia a la región central del rango de los datos. En la figura 3, los transistores M1-M4 son de dimensiones W/L=4.8? m/2.4? m, mientras los transistores M5 y M6 tiene dimensiones W/L=7.2? m/2.4? m. La corriente de polarización es de 30 ? A. En el circuito de adaptación, las dimensiones de los transistores M1-M24 son W/L=4.8? m/2.4? m, mientras los transistores M25-M26 tienen dimensiones W/L=5.6? m/2.4? m. Los valores de las corrientes son I1= 2 ? A, I2= 2 ? A, I3= 1? A e I4= 8? A. Todas las simulaciones fueron realizadas en el simulador de circuitos Tanner Spice versión 5.0, utilizando el modelo BSIM3.3 con los parámetros de un proceso AMI de 1.5? m de MOSIS. El layout del circuito, mostrado en la figura 8, ha sido realizado y enviado a fabricación. 5. CONCLUSIONES Se ha descrito el diseño de un filtro de mediana con adaptación difusa, realizado para una tecnología CMOS estándar. El circuito presenta una reducción de la complejidad del estimador, así como un mejor tiempo de establecimiento respecto a otros trabajos reportados. Los resultados fueron comprobados utilizando un filtro de mediana de tres entradas. 6. REFERENCIAS [1] B. J. Justusson, “Median Filtering: Statistical Properties,” in Two Dimensional Digital Signal Processing II, T. Huang ed., SpringerVerlag, Berlin, GE, 1981. [2] I. Pitas and A.N.Venetsanopoulos, “Nonlinear digital filters: Principles and Applications,” Kluwer Academic Pub., Boston, MA, 1990. [3] M. Karaman, L. Onural and A. Atalar, “Design and Implementation of a General Purpose Median Filter in VLSI,” on VLSI Signal Processing III, R. W. Brodersen and H. S. Moscowitz Eds., IEEE Press, New York, NY, 1988. [4] A. Diaz-Sanchez, J. Ramirez-Angulo, A. Lopez and E. Sanchez- Sinencio, “A Fully Parallel Analog Median Filter,” 5th IEEE Int. Conference on Electronics, Circuits and Systems, Lisboa, Portugal, pp. 381-384. [5] A. Diaz-Sanchez and J. Ramirez-Angulo, “Analog Weighted Median Filters,” 2000 Intl. Symposium on Circuit and Systems, East Lansing, Mich., August 2000. [6] F.Y. Edgeworth, “A new method of reducing observations relating to several quantities,” Phil.Mag. (Fifth Series), Vol. 24, 1887. [7] L.Yin, M. Gabbouj and Y. Neuvo,“Weighted, Median Filters:A Tutorial,” IEEE Trans. on Circuit and Systems-II: Analog and Signal Processing, Vol. 34, No. 3, March 1996 [8] G. Arce, “A Generalized Weighted Median Filter Structure Admitting Real-Valued Weight,” Proc. 1998 Intl. Conference on Acoustics, Speech and Signal Processing, Vol. 5, pp. 2849-2852, 1998. Input V1 + V2 + Vo - VN + - Figura 3. Detector de mediana. Output Filter Mask FF FB Weight Algorithm Figura 4. Circuito de membresía. Figura 1. Diagrama general de un filtro adaptivo. Figura 2. Comparador de transconductancia. Figura 5. Respuesta en DC del circuito de generación de la función membresía. Figura 6. El circuito de adaptación. Figura 7 .- Resultados simulados para un filtro de mediana de tres elementos. Figura 8 .- Layout del filtro de mediana.