Capı́tulo 2
Modelización: Ejemplos y
aplicaciones
2.1.
¿Qué es un modelo?
Un modelo es una representación idealizada pero precisa de los (algunos) componentes de un sistema dinámico cuyo comportamiento se quiere estudiar o predecir.
Se usan los modelos porque en general los sistemas resultan demasiado complejos. Un modelo puede no ser único: la elección del modelo depende de las preguntas
que queremos contestar.
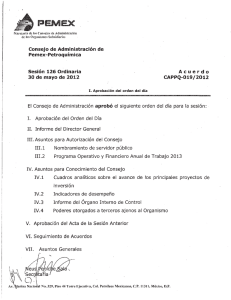
En la siguiente figura se presenta a modo de ejemplo un modelo del amortiguador
de una rueda de un coche.
Figura 2.1: Modelo del amortiguador de una rueda de un coche
9
10
Modelización: Ejemplos y aplicaciones
Un modelo debe ser completo y eficiente. Además, debe ser sencillo pero no
simplista, es decir, no debe existir pérdida significativa de información.
Un modelo matemático es una representación mediante ecuaciones del sistema
dinámico (fı́sico, biológico, económico, ...) una vez modelizado.
Un modelo matemático correspondiente al modelo de la Figura 2.1 (más adelante
en este capı́tulo se explicará cómo se obtiene) es:
:b ` Ks pxb ´ xw q “ fa ptq
Mb x
:w ` Ks pxw ´ xs q ` Kt pxw ´ xr q ` Bt px9 w ´ x9 r q “ ´fa ptq.
Mw x
Cuando se quiere resolver un problema complejo nuevo, puede ser conveniente
comenzar a trabajar primero con un modelo simplificado. Este modelo simplificado puede que ignore ciertas propiedades inherentes al sistema, pero nos proporcionará una idea general de la solución. A continuación, deberemos desarrollar un
modelo matemático más completo para poder realizar un análisis más exhaustivo
de los resultados.
En un sistema de control se tienen variables que, en general, pueden cambiar
con el tiempo. Estas variables se pueden clasificar como:
Variables de salida, salidas o medidas: son las cantidades que se miden
y se quieren controlar.
Variables de entrada, entradas, señales de control o controles: son
las cantidades que se pueden modificar con el fin de producir un determinado
efecto sobre los valores de las variables de salida.
Perturbaciones, ruido: son señales que tienden a afectar negativamente el
valor de la salida de un sistema. Tienen una componente aleatoria o son completamente aleatorias. Pueden ser internas, si se generan dentro del sistema; o
externas, si se generan fuera de él. En este último caso son entradas al sistema.
Incertidumbre: es falta de información en alguna parte del sistema modelado.
Además, se pueden definir las variables de estado, que son variables auxiliares
que resumen toda la información pasada relevante para conocer el futuro del sistema.
En el resto del capı́tulo se presentan modelos matemáticos de sistemas dinámicos
mecánicos, eléctricos, biológicos, económicos y térmicos.
2.2 Sistemas mecánicos de traslación
2.2.
11
Sistemas mecánicos de traslación
En esta sección vamos a describir algunos modelos matemáticos de sistemas
mecánicos de traslación simples. El comportamiento dinámico de un sistema mecánico de traslación está descrito por vectores de desplazamientos, velocidades y fuerzas. Una técnica de modelado para dichos sistemas consiste en representarlos como
una interconexión de un número finito de elementos idealizados (masas, muelles y
amortiguadores). Los elementos se describen como pasivos porque pueden disipar o
almacenar energı́a, pero no pueden introducirla en el sistema. El comportamiento de
cada elemento está gobernado por una ley fı́sica simple, que se llama ecuación o ley
constitutiva del elemento. La ley fundamental que controla los sistemas mecánicos
es la segunda ley del movimiento de Newton: “La suma de las fuerzas que actúan
sobre una partı́cula es igual a la razón del cambio del momento lineal respecto
del tiempo”. Por lo tanto, la ley constitutiva de un elemento masa está dada por
d
pM vptqq “ F ptq donde vptq es la velocidad de la masa M y F ptq es la fuerza aplidt
cada a la masa. La masa se expresa en kilogramos, la velocidad en metros/segundos
y la fuerza en newtons. Las masas almacenan energı́a cinética.
La ley constitutiva de un muelle (también llamado resorte) lineal está dada
por la ley de Hooke: “El alargamiento (estiramiento o elongación) que experimenta
un muelle es directamente proporcional a la fuerza aplicada sobre el mismo”. Ası́,
kyptq “ F ptq donde yptq es la elongación, F ptq es la fuerza aplicada al muelle y k
es la constante de elasticidad del muelle. El desplazamiento se expresa en metros y
la constante k en kilogramos/segundos2 o, lo que es lo mismo, newtons/metros. Los
muelles almacenan energı́a potencial.
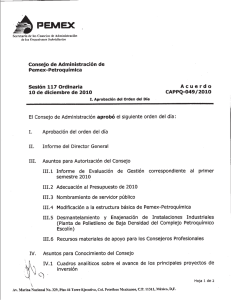
Una realización fı́sica de un amortiguador traslacional lineal se compone de un
cilindro con un pistón móvil. El cilindro está lleno de un fluido viscoso y hay agujeros
en la cara del pistón a través de los cuales el fluido pasa.
Figura 2.2: Realización fı́sica de un amortiguador lineal
El amortiguamiento viscoso resulta en una relación lineal entre la fuerza y la velocidad relativa del pistón. Por lo tanto, cvptq “ F ptq donde vptq es la velocidad
relativa del pistón, F ptq es la fuerza aplicada al amortiguador y c es la constante
12
Modelización: Ejemplos y aplicaciones
de amortiguación. La constante c se expresa en kilogramos/segundos o, lo que es lo
mismo, newtons¨segundos/metros. Los amortiguadores disipan energı́a.
Suponemos que las fuerzas se transmiten sin cambios a través de los resortes
y amortiguadores viscosos. Si se estira un extremo de un resorte o amortiguador
se observa una fuerza igual en el otro extremo. El desplazamiento relativo de los
extremos del resorte proporciona una medida de la fuerza que actúa sobre él y la
velocidad relativa de los extremos del amortiguador una medida de la fuerza sobre
el amortiguador. Por otra parte, la diferencia entre una fuerza aplicada a la masa y
una fuerza ejercida por la masa (sobre otro elemento) proporciona una aceleración.
La siguiente tabla resume las leyes constitutivas de las masas, muelles y amortiguadores. En la tabla las fuerzas están asociadas con las flechas.
Si describimos un sistema mecánico como una interconexión de un número finito
de masas, muelles y amortiguadores, obtendremos un modelo del sistema global
combinando las leyes constitutivas de cada elemento con las leyes de interconexión
que gobiernan las interacciones entre ellos. Asumiremos que las fuerzas entre los
elementos mecánicos obedecen la tercera ley de Newton de acción y reacción: “Toda
fuerza de un elemento sobre otro va acompañada de una fuerza de reacción del
segundo elemento sobre el primero de igual magnitud pero en dirección opuesta a lo
largo de la lı́nea que los une”.
Vemos ahora cómo obtener un modelo matemático de un oscilador lineal y una
aplicación de éste en automoción.
Ejemplo 2.1 (Oscilador lineal horizontal) Considérese un sistema masa–resorte–
amortiguador horizontal como el de la figura, libre de rozamientos.
2.2 Sistemas mecánicos de traslación
13
Figura 2.3: Sistema masa-resorte-amortiguador horizontal
Una realización fı́sica de un muelle y amortiguador es la siguiente
Figura 2.4: Realización fı́sica de un muelle-amortiguador
La función qptq representa la posición de la masa m en el tiempo t con respecto a
su posición de descanso o equilibrio. Se usa la notación q9 para denotar la derivada
de q respecto del tiempo, es decir, la velocidad de la masa y q: para representar la
segunda derivada, es decir, la aceleración. Las fuerzas que actúan sobre la masa m
son las correspondientes al muelle, de constante k, y al amortiguador, de constante
c, ambas en sentido contrario al desplazamiento. Por la segunda ley de Newton, la
q ptq. Ası́, la ecuación del movimiento es
suma de estas debe ser igual a m:
m:
q ptq “ ´cqptq
9 ´ kqptq.
Esta es una ecuación diferencial lineal de segundo orden con coeficientes constantes.
Ejemplo 2.2 (Oscilador lineal vertical) Un sistema masa-resorte-amortiguadorfuerza externa vertical consiste de un resorte de masa despreciable que cuelga suspendido de un soporte rı́gido, una masa puntual M que se encuentra sujeta al extremo
libre del resorte y a un mecanismo amortiguador.
14
Modelización: Ejemplos y aplicaciones
Figura 2.5: Oscilador lineal
La masa se mueve a lo largo de un eje coordenado vertical. Definimos como dirección
positiva la que apunta hacia abajo y definimos su origen en la posición de equilibrio
de la masa bajo la influencia de la gravedad (ası́ evitamos tener en cuenta la fuerza
de la gravedad). La función yptq que describe la posición de la masa en el tiempo t
coincide entonces con su desplazamiento respecto a la posición de equilibrio. Además
de la fuerza exterior βuptq hay dos tipos de fuerzas interiores que actúan sobre la
masa. Éstas están modelizadas por el muelle y el amortiguador con coeficientes k y c
respectivamente. Nótese además que están en dirección opuesta al desplazamiento y
a la velocidad respectivamente. Por la segunda ley de Newton la suma de las fuerzas
actuando sobre M debe ser igual a M y:. La ecuación del movimiento que resulta es
por lo tanto
9 ` kyptq “ βuptq.
M y:ptq ` cyptq
Nótese que si se hubiera elegido como referencia del desplazamiento la posición
relajada del resorte y no la de la masa bajo la acción de la gravedad la ecuación
del movimiento habrı́a sido la misma. En efecto, sea xptq la posición de la masa
en el tiempo t con respecto a la posición relajada del resorte. La elongación inicial
con el sistema en reposo debido a la fuerza gravitacional M g es M g{k (pues por la
segunda ley de Newton 0 “ M g ´ kx). Por lo tanto, yptq “ xptq ´ M g{k. Ahora, por
la segunda ley de Newton, la suma de las fuerzas actuando sobre M debe ser igual
:.
a Mx
:ptq ` cxptq
9 ` kxptq “ βuptq ` M g.
Mx
Realizando el cambio de variable yptq “ xptq ´ M g{k, se obtiene la ecuación diferencial anterior en y
M y:ptq ` cyptq
9 ` kyptq “ βuptq.
Esta es una ecuación diferencial. La variable de entrada es βuptq mientras que la
variable de salida es el desplazamiento yptq. Suponiendo que yp0q “ 0 y yp0q
9
“0
nuestro objetivo podrı́a ser controlar el sistema de forma que pudiéramos conseguir
una determinada elongación, devolver la masa a su posición de equilibrio, etc.
Ejemplo 2.3 (Sistema de dos masas conectadas por un resorte y un amortiguador) Consideremos ahora un sistema con dos masas y un resorte y un amortiguador conectándolas. Se supone que no hay rozamiento asociado con las superficies.
Figura 2.6: Un sistema mecánico acoplado
2.2 Sistemas mecánicos de traslación
15
La suma de fuerzas en ambas masas proporciona dos ecuaciones diferenciales en
términos de dos variables. Si el muelle produce una fuerza sobre M1 entonces, por
la tercera ley de Newton, la masa M1 ejerce una fuerza igual y opuesta sobre el
muelle. Ésta se transmite a través del mismo para aparecer como una fuerza aplicada sobre M2 y la elongación del resorte es proporcional a la fuerza transmitida.
La fuerza aplicada por M1 al amortiguador se transmite también a M2 como una
fuerza aplicada y la velocidad relativa de las dos masas es proporcional a la fuerza
transmitida. En el siguiente diagrama se muestran las fuerzas que actúan sobre M1
y M2 .
Figura 2.7: Diagrama de fuerzas
Aplicando la segunda ley de Newton para cada masa y la tercera ley de Newton
para la interacción entre las masas se obtienen las ecuaciones del movimiento:
M1 y:1 ptq ` Bpy91 ptq ´ y92 ptqq ` Kpy1 ptq ´ y2 ptqq “ f ptq
M2 y:2 ptq ` Bpy92 ptq ´ y91 ptqq ` Kpy2 ptq ´ y1 ptqq “ 0.
Veamos ahora un ejemplo de aplicación del oscilador lineal.
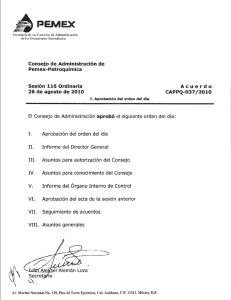
Ejemplo 2.4 (Suspensión de un coche) El propósito de un sistema de suspensión para un coche es el de suavizar la respuesta del coche a las irregularidades de las
carreteras. Solo consideraremos los movimientos verticales del coche e ignoraremos
los posibles movimientos rotacionales. Para simplificar utilizamos un modelo de un
cuarto de coche, con la consideración de una rueda, la mitad de un eje y un cuarto
de la masa del cuerpo del coche. El sistema incorpora un actuador que se conecta
directamente entre el cuerpo y el eje (ası́ se puede introducir una fuerza controlada
fa ptq en el sistema de suspensión).
16
Modelización: Ejemplos y aplicaciones
Figura 2.8: Suspensión de un cuarto de coche
La rueda se modeliza como una combinación de un resorte y un amortiguador y se
conecta un resorte en paralelo con el actuador entre el eje (masa Mw ) y el cuerpo
(masa Mb ) para soportar el peso del cuerpo. Como el cuerpo del coche y el eje se
pueden mover independientemente, necesitamos dos variables de posición xb y xw .
Como puntos de referencia para estas posiciones elegimos las posiciones de descanso
para el cuerpo del coche y el eje sobre el nivel de la carretera bajo la influencia de
la gravedad. Sea xr ptq el desplazamiento del punto de contacto de la rueda con la
carretera. Este depende del perfil de la carretera y de la posición del coche.
Figura 2.9: Diagrama de fuerzas sobre el cuerpo y el eje
Aplicando la segunda ley de Newton para cada masa y la tercera ley de Newton
para la interacción entre las masas se obtienen las ecuaciones del movimiento:
:b ` Ks pxb ´ xw q “ fa ptq
Mb x
:w ` Bt px9 w ´ x9 r q ` Ks pxw ´ xb q ` Kt pxw ´ xr q “ ´fa ptq
Mw x
La variable xr ptq puede ser considerada como una perturbación del sistema. La
variable de entrada de este sistema es fa ptq y las variables de salida xb ptq y x9 b ptq.
El objetivo del diseño de este sistema de suspensión serı́a atenuar, mediante el
actuador (o controlador) fa ptq, las vibraciones del coche, es decir, los valores de xb
y x9 b , producidas por xr a fin de preservar el confort de los pasajeros (disturbance
attenuation problem).
2.3 Sistemas mecánicos de rotación
17
Otras aplicaciones de los sistemas mecánicos de traslación lineal son el control
automático de la velocidad (cruise control) (ver [1, Section 3.1]) y el microscopio de
fuerza atómica (ver [1, Section 3.5]).
2.3.
Sistemas mecánicos de rotación
En la sección anterior se han tratado los sistemas mecánicos traslacionales, cuyos movimientos se restringen a una dirección. A partir de ahora estudiaremos los
movimientos de una masa en tres dimensiones, que están gobernados por la versión
vectorial de la segunda ley de Newton.
Considérese un punto fijo O. Sea rptq el vector de posición de una partı́cula
de masa m respecto de O en el momento t y sea Fptq el vector suma de todas las
fuerzas aplicadas a la partı́cula en el tiempo t. Entonces, por la versión vectorial de
la segunda ley de Newton,
m:rptq “ Fptq.
El momento angular de una partı́cula de masa m respecto de O, Hptq, se
define como el producto vectorial
Hptq “ rptq ˆ m9rptq.
El correspondiente par o momento de fuerza, Nptq, debido a la fuerza Fptq
se define como
Nptq “ rptq ˆ Fptq.
(2.1)
Por lo tanto, se cumple la siguiente relación entre el par de fuerza aplicado a la
partı́cula y la tasa de cambio de su momento angular
d
9
Hptq
“ prptq ˆ m9rptqq “ r9 ptq ˆ m9rptq ` rptq ˆ m:rptq “ rptq ˆ Fptq “ Nptq, (2.2)
dt
es decir, el par de fuerza que actúa sobre una partı́cula es igual a la razón del cambio
del momento angular respecto del tiempo.
A partir de ahora consideramos sistemas rotacionales planos. Esto significa que
todos los elementos considerados rotan alrededor de ejes que son paralelos entre sı́ y
que todas las fuerzas se restringen al plano. Considérese una partı́cula de masa m
rotando alrededor de un eje paralelo al eje z a través de un punto fijo O “ px0 , y0 , 0q
en el plano x, y. Sea rptq “ pxptq, yptq, 0q el vector de posición de la partı́cula respecto
a O en el tiempo t y px0 , y0 , 0q ` rptq “ px0 , y0 , 0q ` pxptq, yptq, 0q las coordenadas de
la partı́cula en el tiempo t. Tal y como hemos supuesto la distancia de la partı́cula a
18
Modelización: Ejemplos y aplicaciones
O, ||rptq|| “ ||pxptq, yptq, 0q|| “ pxptq2 ` yptq2 q1{2 , es constante. Llamamos r “ ||rptq||.
Derivando respecto de t
xptqxptq
9 ` yptqyptq
9 “ 0.
Por lo tanto,
9
9
9
9
yptq
xptq
yptq
xptq
“´
. Ası́, existe un número real wptq “
“´
tal que
xptq
yptq
xptq
yptq
9
9
r9 ptq “ pxptq,
yptq,
0q “ wptqp´yptq, xptq, 0q.
Definimos wptq “ p0, 0, wptqq, que representa la velocidad angular de la partı́cula
alrededor de O en el instante t. Se cumple que
r9 ptq “ wptq ˆ rptq.
Sea N ptq la componente z del par generado por una fuerza dada Fptq “ pF1 ptq, F2 ptq, 0q
aplicada a la partı́cula. Por (2.1) se tiene que
N ptq “ xptqF2 ptq ´ yptqF1 ptq.
(2.3)
El momento angular de la partı́cula alrededor de O en el instante t es
Hptq “ rptq ˆ m9rptq “ rptq ˆ mpwptq ˆ rptqq “ mp0, 0, wptqr2 q
y de (2.2) se deduce que la ecuación del movimiento es
9
“ N ptq.
mr2 wptq
(2.4)
9
xptqF2 ptq ´ yptqF1 ptq “ N ptq “ mr2 wptq.
(2.5)
De (2.3) y (2.4) se tiene que
Se define el momento de inercia de la partı́cula alrededor de O como
J “ mr2 .
Por lo tanto,
d
pJwptqq.
(2.6)
dt
Hay una relación muy estrecha entre las rotaciones en el plano y los movimientos
traslacionales en una dimensión. Los equivalentes rotacionales de masa, desplazamiento, velocidad y fuerza son momento de inercia, ángulo o desplazamiento angular,
velocidad angular y par de fuerza, respectivamente. La siguiente tabla presenta los
elementos equivalentes rotacionales a masas, muelles y amortiguadores.
9
N ptq “ J wptq
“
2.3 Sistemas mecánicos de rotación
19
La inercia es una propiedad de un elemento que almacena la energı́a cinética
del movimiento rotacional. Cuando un par de fuerza se aplica a un cuerpo de inerd
cia J, como se ha visto en (2.6), N ptq “
pJwptqq donde wptq está medida en
dt
radianes/segundos, N ptq en newtons¨metros y J en kilogramos¨metros2 .
Un muelle o resorte de torsión es un mecanismo que se opone a ser girado, desarrollando un par de fuerza proporcional al ángulo de giro. Por lo tanto, N ptq “ kθptq
donde θptq es el ángulo de giro, medido en radianes y k es la constante del resorte
torsional, medida en newtons¨metros/radianes. Ejemplos cotidianos de muelles de
torsión son una pinza de colgar la ropa o una trampa para ratones.
Figura 2.10: Realizaciones fı́sicas de muelles de torsión
Los amortiguadores viscosos rotacionales producen un par de fuerza que varı́a
en proporción directa con la velocidad angular, N ptq “ cwptq, donde la constante de
amortiguación c está medida en newtons¨metros¨segundos/radianes.
Las leyes de interconexión para los elementos rotacionales son totalmente análogas a las de los sistemas lineales si los elementos que interaccionan rotan alrededor
del mismo eje (no sirve para ejes paralelos, en general). Ası́, el par de fuerza que
realiza un elemento sobre otro es de la misma magnitud pero de sentido contrario
al que ejerce el segundo sobre el primero.
20
Modelización: Ejemplos y aplicaciones
Ejemplo 2.5 Sea un disco con momento de inercia J alrededor de su eje de rotación.
Está suspendido de un soporte mediante un resorte de torsión de constante K y
amortiguado rotacionalmente como en la figura.
9
Sea θptq el desplazamiento angular respecto de la posición de reposo, wptq “ θptq
la velocidad angular y T ptq el par de fuerza ejercido. La ecuación matemática que
modeliza este sistema es
: ` B θptq
9 ` Kθptq “ T ptq.
J θptq
Ejemplo 2.6 Sea ahora el siguiente sistema rotacional
Sus ecuaciones de movimiento son
J1 θ:1 ptq ` B1 θ91 ptq ` K1 θ1 ptq ` K2 pθ1 ptq ´ θ2 ptqq “ T1 ptq
J2 θ:2 ptq ` B2 θ92 ptq ` K2 pθ2 ptq ´ θ1 ptqq ` K3 θ2 ptq “ T2 ptq
Ejemplo 2.7 (Péndulo) Considérese un péndulo de longitud l y masa m suspendido de un punto fijo O como en la figura.
2.3 Sistemas mecánicos de rotación
21
Vamos a modelizar el péndulo como una masa puntual m sujeta a una barra rı́gida sin
masa de longitud l que rota en el plano alrededor de O sin fricción. Supongamos que
:
el ángulo desde la vertical hacia abajo hasta la barra es θ. Por (2.4) N ptq “ ml2 θptq
y por (2.3) N ptq “ xptqp´mgq “ l sen θptqp´mgq “ ´mgl sen θptq. Ası́ obtenemos la
siguiente ecuación
: “ ´mgl sen θptq.
ml2 θptq
Esta es una ecuación diferencial no lineal de orden 2.
Ejemplo 2.8 (Sistema carro-péndulo) Considérese un péndulo que rota alrededor de un pivote situado en un carro. El carro tiene masa M y circula en un raı́l
horizontal empujado por una fuerza βuptq. Existe fricción viscosa entre el carro y el
raı́l. El centro de masa del péndulo está a una distancia l del pivote y el momento
de inercia del péndulo alrededor de su centro de masa es J. También existe fricción
viscosa en el pivote. La posición del carro se mide por el desplazamiento horizontal
r de su centro de masa (que suponemos que coincide con la localización del pivote)
al origen de un sistema de coordenadas. La posición del péndulo se mide por el
desplazamiento angular θ de la lı́nea que une su centro de masa con el pivote desde
la vertical hacia abajo, es decir, medida en la dirección contraria a las agujas del
reloj. Suponemos que el movimiento del carro es unidimensional (los pares de fuerza
generados por todas las fuerzas que actúan en el carro están en equilibrio).
Las fuerzas verticales que actúan sobre el carro son las fuerzas de contacto
w1 ptq, w2 ptq a través de las ruedas del carro, la fuerza gravitacional Gptq y la componente vertical de la fuerza de contacto (desconocida) F2 ptq en el pivote. Como
hemos supuesto que el carro solo tiene movimiento unidimensional, éstas están en
equilibrio.
9
Las fuerzas horizontales sobre el carro son βuptq, la fricción viscosa ´crptq
y
la componente horizontal de la fuerza de contacto (desconocida) F1 ptq en el pivote.
Ası́,
9 ` F1 ptq.
M r:ptq “ βuptq ´ crptq
(2.7)
Para describir el movimiento en el plano del péndulo, sean pxptq, yptqq las coordenadas de la masa puntual del péndulo en el momento t. Por lo tanto, xptq “
22
Modelización: Ejemplos y aplicaciones
rptq ` l sen θptq y yptq “ ´l cos θptq. Las ecuaciones de los movimientos horizontales
y verticales del péndulo son
xptq “ ´F1 ptq ô m
m:
d2
prptq ` l sen θptqq “ ´F1 ptq
dt2
m:
y ptq “ ´mg ` F2 ptq ô m
d2
p´l cos θptqq “ ´mg ` F2 ptq
dt2
Calculando las derivadas segundas se obtiene
´
¯
: cos θptq ´ lθptq
9 2 sen θptq “ ´F1 ptq
m r:ptq ` lθptq
´
¯
: sen θptq ` θptq
9 2 cos θptq “ ´mg ` F2 ptq.
ml lθptq
(2.8)
Queda por determinar la rotación del péndulo alrededor de su centro de masa.
La fuerza gravitacional no produce par en el péndulo alrededor de pxptq, yptqq (la
distancia es 0). Ası́ que la rotación del péndulo está determinada por el par de la
fuerza Fptq “ p´F1 ptq, F2 ptqq alrededor de pxptq, yptqq. El vector desde pxptq, yptqq al
pivote en el que se aplica la fuerza Fptq está dado por p´l sen θptq, l cos θptqq, ası́ que
el par de Fptq alrededor de pxptq, yptqq es ´F2 ptql sen θptq ` F1 ptql cos θptq (ver (2.3)).
Suponiendo una fricción rotacional en el eje de giro del péndulo de constante cP , la
ecuación del movimiento rotacional es
: “ ´F2 ptql sen θptq ` F1 ptql cos θptq ´ cP θptq.
9
J θptq
(2.9)
Despejando F1 ptq y F2 ptq en (2.8) y sustituyendo en (2.7) y (2.9) el comportamiento
dinámico del sistema carro-péndulo queda descrito por las ecuaciones
"
9
r “ pJ ` ml2 qpβu ´ cr9 ` mlθ92 sen θq ` ml cos θpmgl sen θ ` cP θq
M pθq:
2
M pθqθ: “ ´ml cos θpβu ´ cr9 ` mlθ9 sen θq ´ pM ` mqpcp θ9 ` mgl sen θq
(2.10)
donde M pθq “ pM ` mqJ ` ml2 M ` m2 l2 sen2 θ.
La variable de entrada de este sistema es βuptq y las variables de salida rptq y
9
9
θptq. Si rp0q
“ θp0q
“ 0, θp0q “ 0 ó π y uptq “ 0 el sistema permanecerá en reposo.
Una aplicación de este sistema es una grúa con un gancho suspendido de un
carro desplazándose a lo largo de un raı́l horizontal. Estas grúas operan alrededor
de la posición vertical del péndulo y requieren estar cerca de esta dirección antes
de depositar la carga. Un problema de control serı́a llevar el péndulo en posición de
equilibrio (θ “ 0) a cualquier punto r0 en un tiempo finito (controllability problem).
2.3 Sistemas mecánicos de rotación
23
Ejemplo 2.9 (Péndulo invertido) Considérese un péndulo invertido
Vamos a escribir las ecuaciones del movimiento en función del ángulo ϕptq. Basta
hacer el cambio de variable θptq “ π ` ϕptq en (2.10)
"
9
M pϕq:
r “ pJ ` ml2 qpβu ´ cr9 ´ mlϕ9 2 sen ϕq ´ ml cos ϕp´mgl sen ϕ ` cP ϕq
2
M pϕqϕ: “ ml cos ϕpβu ´ cr9 ´ mlϕ9 sen ϕq ´ pM ` mqpcp ϕ9 ´ mgl sen ϕq.
La variable de entrada es βuptq y las variables de salida rptq y ϕptq. Un problema
de control serı́a diseñar un regulador que mantenga el péndulo en posición vertical
(ϕ “ 0) en cualquier punto (r0 ). El regulador o controlador acepta como entradas las
salidas del sistema (rptq y ϕptq) y devuelve como salida la entrada uptq que estabiliza
el péndulo (stabilization problem).
Una aplicación de este modelo es el controlar un cohete en posición vertical.
24
Modelización: Ejemplos y aplicaciones
Otros sistemas mecánicos de rotación son la bicicleta en giro (ver [1, Section
3.2]), el segway y el despegue de un cohete espacial (ver [1, Section 2.1]).
Si se desea consultar información sobre sistemas mecánicos de traslación y rotación en 3 dimensiones se recomienda el enlace [19]. Un ejemplo de ello es un satélite
en órbita geoestacionaria.
2.4.
Circuitos eléctricos
Un circuito eléctrico es un recorrido preestablecido por el que se desplazan cargas
eléctricas. Las cargas eléctricas, Q, que constituyen una corriente eléctrica, pasan
de un punto que tiene mayor potencial eléctrico a otro que tiene un potencial inferior. Para mantener permanentemente esa diferencia de potencial, llamada también
voltaje o tensión, V , entre los extremos de un conductor, se necesita un dispositivo
llamado generador (pila, baterı́a, dinamo, alternador, ...) que tome las cargas que
llegan a un extremo y las impulse hasta el otro. El flujo de cargas eléctricas por
un conductor constituye una corriente eléctrica. Se define la intensidad de corriente
eléctrica, I, como la cantidad de carga eléctrica que circula por una sección de un
conductor en la unidad de tiempo. Por lo tanto,
I“
dQ
.
dt
En el sistema métrico internacional las cargas se miden en culombios, las diferencias de potencial o voltaje se miden en voltios y las instensidades de corriente en
amperios.
Un circuito eléctrico está formado por un cable conductor que conecta elementos.
Los elementos clásicos de un circuito son resistores, inductores y condensadores. El
comportamiento de cada elemento está gobernado por una ley fı́sica simple, que se
llama ecuación o ley constitutiva del elemento.
Los resistores o resistencias son conductores hechos de un material homogéneo en
forma de cilindro que resisten el flujo de la corriente, ası́ que crean una diferencia de
voltaje a través de ellos. La resistencia del resistor R depende de la conductividad del
material σ, de la longitud del cilindro l y del área de la sección transversal al mismo
l
S, es decir, R “
. La ley de Ohm establece que la caı́da de voltaje V a través
σS
de un resistor de resistencia R es proporcional a la corriente I, es decir, V “ IR.
La resistencia se mide en ohmios (Ω). Ejemplos de resistores son las planchas, las
bombillas, etc.
Un condensador es un dispositivo formado por dos superficies o placas conductoras paralelas sometidas a una diferencia de potencial V , que adquieren una
2.4 Circuitos eléctricos
25
determinada carga eléctrica Q, positiva en una de ellas y negativa en la otra, siendo
nula la variación de carga total. Sirven para almacenar energı́a eléctrica. La carga
almacenada en una de las placas es proporcional a la diferencia de potencial entre
esta placa y la otra, siendo la constante de proporcionalidad la llamada capacitancia
C, es decir, Q “ CV . En el sistema internacional de unidades la capacitancia se
mide en faradios (F ).
Un inductor es un conductor, por ejemplo un cable, enrollado en una bobina.
Cuando una corriente fluye a través de él, la energı́a se almacena temporalmente en
un campo magnético en la bobina. Cuando la corriente a través del inductor cambia
el campo magnético, que varı́a en el tiempo, induce un voltaje en el conductor de
acuerdo con la ley de Faraday. El voltaje V a través de un inductor de inductancia
L es proporcional a la tasa de cambio con respecto al tiempo de la corriente I que
dI
pasa a través de él, es decir, V “ L . La inductancia se mide en henrios (H).
dt
La siguiente tabla resume los elementos de un circuito eléctrico junto con sus
leyes constitutivas.
Además de la leyes constitutivas de los elementos idealizados de un circuito
eléctrico, hay que tener en cuenta las leyes de interconexión entre estos elementos.
Estas se llaman las leyes de Kirchoff:
Ley de corrientes de Kirchoff, ley de nodos de Kirchoff o primera ley de Kirchoff: “La suma de las corrientes que concurren en un nodo es cero”, donde
un nodo es un punto de un circuito donde concurren más de dos conductores
(cables).
Ley de tensiones o voltajes de Kirchoff, ley de lazos de Kirchoff o segunda
ley de Kirchoff: “La suma de las diferencias de potencial en cualquier lazo o
ciclo es cero”, donde un lazo o ciclo es cualquier camino cerrado en un circuito
eléctrico.
Ejemplo 2.10 (Circuito RLC) Considérese un circuito como en la figura
26
Modelización: Ejemplos y aplicaciones
La ley de voltajes de Kirchoff establece que la suma de las caı́das de voltaje a través
de cada elemento es igual al voltaje suministrado eptq. Si las caı́das de voltaje a
través del resistor, condensador e inductor en el tiempo t son VR ptq, VC ptq y VL ptq
respectivamente, entonces
eptq ´ VR ptq ´ VC ptq ´ VL ptq “ 0,
t ě 0.
Ahora bien, si la corriente en el tiempo t es Iptq y la carga en el condensador es Qptq
entonces
9
9
VR ptq “ IptqR, VC ptq “ Qptq{C, VL ptq “ LIptq,
Iptq “ Qptq,
t ě 0.
Por lo tanto,
1
: ` RQptq
9
LQptq
` Qptq “ eptq,
C
t ě 0.
La variable de entrada de este sistema es el voltaje suministrado eptq mientras que
la variable o variables de salida dependen de lo que se quiera observar o controlar.
9
Por ejemplo, podrı́amos tener interés en mantener la corriente Iptq “ Qptq
constante
en el circuito.
Si se escriben la leyes constitutivas de los elementos de un circuito eléctrico en
: para el caso del inductor, V1 ´V2 “ RQ9
términos de la carga, se obtiene V1 ´V2 “ LQ
1
para el caso del resistor y V1 ´ V2 “ Q para el caso del condensador. Nótese
C
la analogı́a que existe entre estas leyes y las de los sistemas mecánicos. Éstas se
presentan en la siguiente tabla.
2.4 Circuitos eléctricos
27
Es decir, los inductores, condensadores y resistores son los equivalentes a las masas,
muelles y amortiguadores en los sistemas mecánicos traslacionales. La tabla anterior
es la tabla de analogı́a fuerza-voltaje.
Ejemplo 2.11 Recuérdese que el sistema de la izquierda fue estudiado en la Sección
2.2.
Vimos que las ecuaciones del movimiento del sistema de la izquierda son
M1 y:1 ptq ` Bpy91 ptq ´ y92 ptqq ` Kpy1 ptq ´ y2 ptqq “ f ptq
M2 y:2 ptq ` Bpy92 ptq ´ y91 ptqq ` Kpy2 ptq ´ y1 ptqq “ 0.
La figura de la derecha presenta un circuito eléctrico análogo, utilizando la
analogı́a fuerza-voltaje. Efectivamente, sus ecuaciones son, según las leyes de Kirchoff,
: 1 ptq ` BpQ9 1 ptq ´ Q9 2 ptqq ` KpQ1 ptq ´ Q2 ptqq “ f ptq
M1 Q
: 2 ptq ` BpQ9 2 ptq ´ Q9 1 ptqq ` KpQ2 ptq ´ Q1 ptqq “ 0.
M2 Q
2.4.1.
Modelo basado en circuitos eléctricos: Amplificadores
operacionales
Un amplificador operacional (op amp) es un dispositivo electrónico diseñado
para amplificar señales, es decir, para elevar el valor de la tensión o corriente de una
señal variable en el tiempo. Originalmente se empleaban para realizar operaciones
matemáticas (sumas, restas, multiplicaciones, divisiones, derivadas, integrales, ...)
en calculadoras analógicas (de ahı́ su nombre). Consta de dos entradas: la entrada
invertida o inversora v´ y la no invertida v` . Tiene una salida vout , que es la diferencia
entre las dos entradas multiplicada por un factor llamado ganancia, k, es decir,
vout
. Se alimenta mediante una tensión simétrica (dos
vout “ kpv` ´ v´ q o k “
v` ´ v´
fuentes de tensión).
28
Modelización: Ejemplos y aplicaciones
Este amplificador operacional es de lazo abierto. Puede conseguir ganancias muy
grandes pero es inestable y difı́cil de controlar. Es por ello por lo que nos podemos permitir perder ganancia conectando componentes externos, tales como resistores o condensadores, entre sus terminales de entrada y salida que nos producen
un amplificador estable. Estos componentes determinan la operación que realiza el
amplificador. En [20] se puede obtener más información sobre los amplificadores
operacionales.
Un amplificador operacional inversor es aquél que usa realimentación negativa,
esto es, una fracción de la señal de salida vuelve a la terminal negativa de la entrada usando un resistor externo. Esta conexión es un lazo cerrado que hace que la
diferencia de potencial en la entrada tienda a cero de la siguiente forma: cuando la
tensión en la salida se eleva, la tensión en la terminal negativa también se eleva, por
lo que v` ´ v´ disminuye y la salida disminuye. Este proceso se estabiliza y v` ´ v´
va disminuyendo y tendiendo a cero. En los amplificadores operacionales inversores
ideales supondremos que v` ´ v´ “ 0 y que no entra corriente en las terminales de
entrada. Ası́, podemos obtener una ecuación para la ganancia de un amplificador
inversor.
Con la notación del dibujo, estamos suponiendo i0 “ 0 y v “ v´ ´v` “ 0. Utilizando
la primera ley de Kirchoff, se cumple que IR1 ´ IR2 “ 0, lo que es equivalente a
0 ´ v2
R2
v1 ´ 0
“
. Por lo tanto, v2 “
p´v1 q. Ası́, la ganancia del amplificador
R1
R2
R1
inversor es
v2
R2
kinv “
“
.
´v1
R1
Ahora bien, si seguimos suponiendo i0 “ 0 pero v ‰ 0 aunque pequeña se cumple
v1 ´ v
v ´ v2
“
. Por lo tanto
que
R1
R2
R1
v“
R1 ` R2
ˆ
˙
R2
v1 ` v2 .
R1
2.4 Circuitos eléctricos
29
Sustituyendo v por ´v2 {k, donde k es la ganancia en lazo abierto (vista al principio
de esta sección) se obtiene
R1
v2 “ ´k
R1 ` R2
ˆ
˙
R2
v1 ` v2 .
R1
Esto es lo que está representado en el diagrama de bloques de la parte derecha de la
última figura. Manipulando la ecuación anterior se obtiene que la ganancia del lazo
cerrado es
R2
kR1
v2
.
kcl “ ´ “
v1
R1 R1 ` R2 ` kR1
Nótese que si k, la ganancia en lazo abierto, es grande entonces la ganancia en
R2
lazo cerrado kcl es la misma que kinv , es decir, lı́m kcl “ kinv . Además, si
“
kÑ8
R1
100 y k “ 106 una variación en la ganancia en lazo abierto grande, por ejemplo
pasar a k 1 “ 2 ¨ 106 , produce una variación en la ganancia en lazo cerrado pequeña:
kcl “ 99,989901 a kcl1 “ 99,99495. Esto es un ejemplo de cómo se puede usar la
realimentación para hacer precisos los sistemas con componentes con incertidumbre.
Aquı́, a través de la realimentación, se pasa de ganancia alta y poca robustez a
disminuir la ganancia pero aumentar la robustez.
El amplificador aditivo sirve para combinar el voltaje presente en varias entradas
en una única salida.
Por la primera ley de Kirchoff, I1 ` I2 ` I3 “ IF . Suponiendo que el voltaje en x es
v1
v2
v3
´vout
cero, tenemos que I1 “
, I2 “
, I3 “
y IF “
. Ası́
R1
R2
R3
RF
vout “ ´RF IF “ ´RF pI1 `I2 `I3 q “ ´RF
ˆ
v1
v2
v3
`
`
R1 R2 R3
˙
“´
ˆ
˙
RF
RF
RF
v1 `
v2 `
v3 .
R1
R2
R3
Aplicaciones del amplificador aditivo son un mezclador de sonidos, un conversor
digital analógico, etc.
El amplificador integrador tiene la siguiente estructura
30
Modelización: Ejemplos y aplicaciones
Suponemos que el voltaje en x es cero. Por la primeraż ley de Kirchoff
se cumple
que
ż
ż
If
Iin
vin
vin
Q
Iin “ If . Por ota parte, Iin “
y 0 ´ vout “
“
dt “
dt “
dt.
Rin
C
C
C
Rin C
Ası́,
ż
1
vout “ ´
vin dt
Rin C
La estructura del amplificador diferenciador es
Suponemos que el voltaje en x es cero.
Por la primera ley de Kirchoff se cumple que
ż
If
Q
“
dt y 0 ´ vout “ If Rf . Por lo tanto, derivando
Iin “ If . Además, vin ´ 0 “
C
C
dvin
en la primera expresión se obtiene If “ C
y sustituyendo este resultado en la
dt
dvin
segunda expresión vout “ ´Rf C
. Ası́,
dt
vout “ ´Rf C
dvin
.
dt
Ya vemos que los amplificadores operacionales son muy versátiles y que se pueden
construir diferentes mediante distintas combinaciones de resistores y condensadores.
2.5.
2.5.1.
Otros sistemas
Dinámica del sistema insulina-glucosa
Es esencial que la concentración de glucosa en sangre se mantenga entre 0.7 y
1.1 gramos/litro. La concentración de glucosa está influenciada por muchos factores
2.5 Otros sistemas
31
como la ingestión de comida, la digestión y el ejercicio. El cuerpo humano tiene un
mecanismo sofisticado que regula la concentración de glucosa en sangre. El páncreas
se encarga de ello, segregando las hormonas insulina y glucagón.
La insulina hace que el nivel de glucosa en sangre baje. Se han desarrollado múltiples
modelos de diferente grado de complejidad. Uno relativamente simple es el minimal
model (ver [3] o [21])
dx1
“ ´pp1 ` x2 qx1 ` p1 ge
dt
dx2
“ ´p2 x2 ` p3 pu ´ ie q
dt
uptq= insulina en la sangre
ie , ge valores de equilibrio de insulina y glucosa
x1 = concentración de glucosa en sangre
x2 = proporcional a la concentración de insulina en el lı́quido intersticial
p1 , p2 , p3 = parámetros.
La insulina en sangre está considerada como una variable de entrada (se puede inyectar de forma intravenosa). El término ´x1 x2 es una interacción entre la concentración
de glucosa e insulina de signo negativo pues la insulina baja la concentración de glucosa en sangre. Los parámetros se determinan experimentalmente, dependiendo de
la población que se quiera modelizar: diabéticos o no, personas mayores o jóvenes,
etc.
32
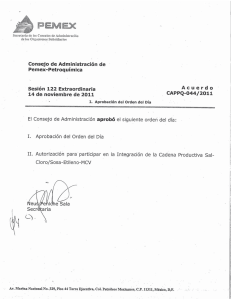
Modelización: Ejemplos y aplicaciones
Las siguientes gráficas muestran la respuesta del cuerpo a una inyección intravenosa de glucosa en el tiempo t “ 0. La concentración de glucosa en ese instante
es alta pero va descendiendo pues el páncreas reacciona rápidamente segregando
insulina. Los niveles de glucosa e insulina van disminuyendo hacia sus puntos de
equilibrio.
2.5.2.
Producto Interior Bruto
En esta sección vamos a presentar un modelo dinámico en tiempo discreto. Generalmente los datos económicos no son continuos sino que suelen estar acumulados
en periodos de tiempo (años, meses, dı́as, ...).
El producto interior bruto (PIB) es una magnitud macroeconómica que expresa
el valor monetario de la producción de bienes y servicios de demanda final de un
paı́s (o una región) durante un perı́odo determinado de tiempo (normalmente un
año).
Veamos el modelo Samuelson-Hicks multiplier-accelerator (consultar por ejemplo
[8]). Las variables básicas que utiliza son:
P ptq: PIB en el año t
Cptq: consumo en el año t
Iptq: inversión en el año t
Gptq: gasto público en el año t.
Este modelo no tiene en cuenta las importaciones y exportaciones. Hace las siguientes
suposiciones:
2.5 Otros sistemas
33
1. El PIB es la suma del consumo, la inversión y el gasto público, es decir,
P ptq “ Cptq ` Iptq ` Gptq, t P N.
2. El consumo del año t ` 1 depende solo del PIB de los dos años previos, es
decir,
Cpt ` 1q “ f pP ptq, P pt ´ 1qq.
3. La inversión en el año t ` 1 solo depende del incremento del PIB desde el año
t ´ 1 al t, es decir,
Ipt ` 1q “ hpP ptq ´ P pt ´ 1qq.
Sutituyendo las dos últimas ecuaciones en la primera se obtiene
P pt ` 1q “ f pP ptq, P pt ´ 1qq ` hpP ptq ´ P pt ´ 1qq ` Gpt ` 1q.
Esta es una ecuación en diferencias de orden 2 que puede ser no lineal. Conocidos
Gptq para t “ 2, 3, . . ., P p0q y P p1q se puede resolver recursivamente, de tal forma que
se puede obtener P ptq para t “ 2, 3, . . .. Ası́, Gptq es una variable de entrada y P ptq
de salida. Un posible objetivo del gobierno puede ser regular el PIB, el consumo y
la inversión manteniendo estas variables tan próximas como se pueda a unos valores
previamente fijados denotados por P ˚ ptq, C ˚ ptq y I ˚ ptq. Si N denota el horizonte
temporal que nos hemos fijado, se tratarı́a de minimizar la siguiente función de coste
de las desviaciones respecto de los objetivos
J“
N
ÿ
rg1 pP ptq ´ P ˚ ptqq2 ` g2 pCptq ´ C ˚ ptqq2 ` g3 pIptq ´ I ˚ ptqq2 s
t“1
donde los coeficientes g1 , g2 y g3 reflejan la importancia relativa de cada objetivo.
Este es un ejemplo de un “quadratic control optimization problem”.
2.5.3.
Calentamiento de una barra metálica
Sea una barra metálica que se calienta mediante chorros de calor a lo largo de ella,
cuya intensidad puede ser controlada. Supóngase que pr, ϕ, xq son sus coordenadas
cilı́ndricas y que podemos pensar en la intensidad de los chorros como una función
vpx, tq (no depende de ϕ). Suponemos también que la conductividad termométrica
de la barra α es constante y que la distribución inicial de la temperatura en el tiempo
t “ 0 es independiente de ϕ. Sea Θpx, tq la temperatura media en el corte transversal
de la barra, C la temperatura de referencia y upx, tq “ Θpx, tq ´ C.
34
Modelización: Ejemplos y aplicaciones
Supongamos que se satisfacen las condiciones de la figura. Esto se puede modelizar
matemáticamente usando la ecuación del calor
B2u
Bu
px, tq “ α 2 px, tq ` vpx, tq,
Bt
Bx
upx, 0q “ f pxq, up0, tq “ 0 “ upl, tq
Esta es una ecuación diferencial en derivadas parciales. La variable de entrada es la
intensidad del calor aplicado vpx, tq y la variable de salida es la temperatura upx, tq.
Un problema de control es controlar la temperatura de la barra en cada punto en
un intervalo de tiempo determinado.
 0
0
Anuncio
Documentos relacionados

Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados