Método para la estimación del momento de inercia de máquinas de
Anuncio

Método para la estimación del momento de inercia de
máquinas de inducción trifásicas a partir de su peso y
altura de eje
TITULACIÓN: Ingeniería Técnica Industrial en Electricidad
AUTOR: Manuel Cereijo Neira
DIRECTOR: Luis Guasch Pesquer
FECHA: Septiembre de 2011.
Método para la estimación del momento de inercia de
máquinas de inducción trifásicas a partir de su peso y
altura de eje
TITULACIÓN: Ingeniería Técnica Industrial en Electricidad
1
ÍNDICE GENERAL
AUTOR: Manuel Cereijo Neira
DIRECTOR: Luis Guasch Pesquer
FECHA: Septiembre/2011.
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1 ÍNDICE GENERAL....................................................................................... 2 2 MEMORIA .................................................................................................... 5 2.1 OBJETO DEL PROYECTO....................................................................8 2.2 ALCANCE...............................................................................................8 2.3 ANTECEDENTES ................................................................................11 2.4 NORMAS Y REFERENCIAS...............................................................12 2.4.1 Disposiciones legales y normas aplicadas......................................... 12 2.4.2 Bibliografía ....................................................................................... 12 2.4.3 Programa de cálculo .......................................................................... 13 2.4.4 Otras referencias............................................................................... 13 2.5 DEFINICIONES Y ABREVIATURAS ................................................13 2.6 REQUISITOS DE DISEÑO ..................................................................13 2.7 ANÁLISIS DE SOLUCIONES .............................................................16 2.8 RESULTADOS FINALES ....................................................................16 2.8.1 Momento de inercia de un cilindro ................................................... 16 2.8.2 Par y momento de inercia.................................................................. 17 2.8.3 Relación entre el peso y la altura de la máquina con su momento de
inercia
........................................................................................................... 19 2.8.4 Determinación del método ................................................................... 20 2.8.4.1 Interpretación de los parámetros de la recta de regresión. ......... 21 2.8.5 La calidad del ajuste.......................................................................... 22 2.8.5.1 Introducción................................................................................ 22 2.8.5.2 El coeficiente de determinación, r²............................................. 22 2.8.5.3 Coeficiente de correlación muestral, r. ...................................... 23 2.8.6 Análisis conjunto de todas las máquinas de la muestra .................... 23 2.8.7 Agrupación de la muestra por familias ............................................. 25 2.8.8 Velocidad de sincronismo ................................................................. 25 2.8.9 Tipo de carcasa.................................................................................. 31 2.8.10 Fabricante. ....................................................................................... 34 2.8.11 Potencia. .......................................................................................... 39 2.8.12 Peso. ................................................................................................ 44 2.8.13 Altura de eje. ................................................................................... 49 2.8.14 Clase de eficiencia........................................................................... 54 2.8.15 Agrupación de la muestra por velocidad de sincronismo y peso .... 61 3
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.8.16 Comprobación de resultados ........................................................... 81 2.9 PLANIFICACIÓN.................................................................................81 2.10 ORDEN DE PRIORIDAD ENTRE LOS DOCUMENTOS BÁSICOS81 3 3.1 ANEXOS...................................................................................................... 83 DOCUMENTACIÓN DE PARTIDA ...................................................85 3.1.1 Recogida de datos ............................................................................. 85 3.1.2 Criterios de selección ........................................................................ 85 3.2 CÁLCULOS ..........................................................................................87 3.2.1 Procesado de la información ............................................................. 87 3.2.2 Criterios y procedimiento de cálculo ................................................ 90 3.2.3 Obtención de resultados .................................................................... 93 3.2.4 Comparación de resultados ............................................................. 104 4
Método para la estimación del momento de inercia de
máquinas de inducción trifásicas a partir de su peso y
altura de eje
TITULACIÓN: Ingeniería Técnica Industrial en Electricidad
2
MEMORIA
AUTOR: Manuel Cereijo Neira
DIRECTOR: Luis Guasch Pesquer
FECHA: Septiembre/2011.
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
ÍNDICE MEMORIA
2 MEMORIA ................................................................................................... 5 2.1 OBJETO DEL PROYECTO....................................................................8 2.2 ALCANCE...............................................................................................8 2.3 ANTECEDENTES ................................................................................11 2.4 NORMAS Y REFERENCIAS...............................................................12 2.4.1 Disposiciones legales y normas aplicadas......................................... 12 2.4.2 Bibliografía ....................................................................................... 12 2.4.3 Programa de cálculo .......................................................................... 13 2.4.4 Otras referencias............................................................................... 13
2.5
DEFINICIONES Y .ABREVIATURAS................................................13
2.6 REQUISITOS DE DISEÑO ..................................................................13
2.7
ANÁLISIS DE SOLUCIONES.............................................................16
2.8 RESULTADOS FINALES ....................................................................16 2.8.1 Momento de inercia de un cilindro ................................................... 16 2.8.2 Par y momento de inercia.................................................................. 17 2.8.3 Relación entre el peso y la altura de la máq. con su m. de inercia.... 19 2.6.4 Determinación del método ................................................................... 20 2.8.4.1 Interpretación de los parámetros de la recta de regresión. ......... 21 2.8.5 La calidad del ajuste.......................................................................... 22 2.8.5.1 Introducción................................................................................ 22 2.8.5.2 El coeficiente de determinación, r²............................................. 22 2.8.5.3 Coeficiente de correlación muestral, r. ..................................... 23 2.8.6 Análisis conjunto de todas las máquinas de la muestra .................... 23 2.8.7 Agrupación de la muestra por familias ............................................. 25 2.8.8 Velocidad de sincronismo ................................................................. 25 2.8.9 Tipo de carcasa.................................................................................. 31 2.8.10 Fabricante. ....................................................................................... 34 2.8.11 Potencia. .......................................................................................... 39 2.8.12 Peso. ................................................................................................ 44 2.8.13 Altura de eje. ................................................................................... 49 2.8.14 Clase de eficiencia........................................................................... 54 2.8.15 Agrupación de la muestra por velocidad de sincronismo y peso .... 61 2.8.16 Comprobación de resultados ........................................................... 81
6
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.9
PLANIFICACIÓN…………………………………………………….81
2.10
ORDEN DE PRIORIDAD ENTRE LOS DOCUMENTOS BÁSICOS81
7
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.1
OBJETO DEL PROYECTO
El objeto de este proyecto consiste en proponer un método para la estimación del
momento de inercia en las máquinas de inducción trifásicas, con rotor en jaula de
ardilla, partiendo de los datos de la altura del eje y el peso de la máquina sin necesidad
de ensayos experimentales.
2.2
ALCANCE
Para el análisis del comportamiento en régimen dinámico de un accionamiento
eléctrico constituido por una máquina de inducción trifásica y una máquina accionada,
es necesario conocer (o estimar) los parámetros del modelo matemático. Entre estos
parámetros existe uno de naturaleza mecánica que es el momento de inercia, y que es la
suma aritmética de los momentos de inercia de todos los elementos del accionamiento
que están calados sobre el eje: máquina de inducción trifásica, acoplamiento y máquina
accionada.
En este proyecto se va a estimar, únicamente, el momento de inercia de la
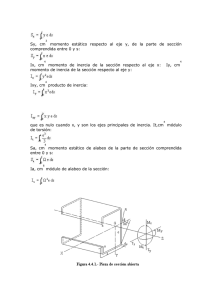
máquina de inducción trifásica.
Fig. 2.1. Máquina de inducción trifásica con rotor en jaula de ardilla.
Además del objetivo final que permite la estimación del momento de inercia en
una máquina de inducción trifásica, el trabajo realizado queda reflejado en las siguientes
tareas:
¾ Búsqueda de catálogos actualizados de algunos de los principales fabricantes de
máquinas de inducción trifásicas a nivel mundial.
¾ Determinación de los datos y/o características que van a influir en la estimación
del momento de inercia.
8
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
¾ Clasificación y agrupación de los datos obtenidos.
¾ Representación y análisis de los datos que permita la elección del método de
estimación más adecuado.
¾ Determinación de los aspectos constructivos de la máquina que pueden influir en
la estimación del momento de inercia.
¾ Propuesta de un modelo de estimación y cálculo de sus parámetros en función de
otras características de la máquina, como pueden ser: material de construcción,
velocidad de sincronismo, potencia, etc.
El alcance del proyecto se concreta en el estudio de una muestra de máquinas
agrupadas según sus características y que ofrece los siguientes datos:
¾ Nº de máquinas: 2624 máquinas de inducción trifásicas con rotor en jaula de
ardilla.
¾ Margen de potencias:
• 0
-
1 kW: 265 máquinas
• 1.1
-
10 kW: 710 máquinas
• 11
-
100 kW: 967 máquinas
• 101
-
1000 kW: 682 máquinas
¾ Frecuencia:
• 50 Hz: 1917 máquinas
• 60 Hz: 707 máquinas
¾ Velocidades de sincronismo:
• 50 Hz:
o 3000 rpm: 572 máquinas
o 1500 rpm: 588 máquinas
o 1000 rpm: 478 máquinas
o
750 rpm: 279 máquinas
9
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
• 60Hz:
o 3600 rpm: 211 máquinas
o 1800 rpm: 215 máquinas
o 1200 rpm: 162 máquinas
o
900 rpm: 119 máquinas
¾ Nº de polos:
•
2 polos: 783 máquinas
•
4 polos: 806 máquinas
•
6 polos: 639 máquinas
•
8 polos: 396 máquinas
¾ Tipo constructivo:
• Acero:
68 máquinas
• Aluminio:
677 máquinas
• Hierro:
1879 máquinas
¾ Tipo de eficiencia según catálogo:
•
Clase IE1 :
590 máquinas
•
Clase IE2 :
1127 máquinas
•
Clase IE3 :
376 máquinas
•
Clase IE4 :
57 máquinas
•
Sin clasif. :
474 máquinas
¾ Tipo de eficiencia calculada según Norma IEC 60034:30/2008:
• Clase IE1:_
566 máquinas
• Clase IE2:
912 máquinas
• Clase IE3:
600 máquinas
• Sin clasif.:
546 máquinas
10
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
¾ Peso:
• 3,5
-
50 kg: 753 máquinas
• 51
-
200 kg: 575 máquinas
• 201
-
1000 kg: 769 máquinas
• 1001 -
4800 kg: 527 máquinas
¾ Altura del eje (h):
2.3
• 56
-
100 mm: 517 máquinas
• 101
-
200 mm: 916 máquinas
• 20
-
300 mm: 551 máquinas
• 301
-
450 mm: 640 máquinas
ANTECEDENTES
El presente método parte de la necesidad de conocer el momento de inercia de
una máquina de inducción trifásica cuando no disponemos de ese parámetro, bien
porque el fabricante no facilita el dato o bien porque no disponemos de catálogo y no se
puede, o quiere, recurrir a métodos experimentales para su estimación.
Un estudio similar ya se realizó en el capítulo 4 de la tesis doctoral del Dr. Adolfo
Andrés Jaramillo Matta. Para este proyecto se ha actualizado y confeccionado una
nueva base de datos de mayor tamaño (de 952 a 2.624 máquinas de inducción) y se ha
procedido a realizar la estimación del momento de inercia en función de otras variables
como puede ser el tipo constructivo de la máquina o la clase de rendimiento.
En el estudio previo del Dr. Jaramillo se observó la existencia de una relación
prácticamente lineal entre el momento de inercia, J, y el producto de la masa por la
altura del eje al cuadrado (M·h²). Esta relación presenta la ventaja de que tanto la masa
como la altura del eje se pueden medir con relativa facilidad (para los casos en que no
aparecen en el catálogo del fabricante o no dispongamos del mismo). En este proyecto
se debe comprobar si con la nueva base de datos ampliada y actualizada se sigue
cumpliendo esta relación prácticamente lineal, así como observar la influencia de otras
variables en dicha relación.
El estudio del Dr. Jaramillo partía de una base de datos de 952 motores de
inducción trifásicos con potencias comprendidas entre 0.75 kW y 800 kW. En este caso
la muestra es de 2624 máquinas con potencias comprendidas entre 0.045 kW y
1000 kW. También se ha ampliado de 5 a 8 el número de los principales fabricantes de
donde se toman los datos de este tipo de máquinas.
11
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
A la hora de establecer las distintas relaciones según las características
constructivas hay que destacar el hecho de haber tenido en cuenta la Norma IEC6003430:2008 que proporciona una armonización global de las clases de rendimiento de los
motores eléctricos y los clasifica según su eficiencia, dado que entre el 30 % y el 40 %
de la energía eléctrica generada a nivel mundial está consumida por motores eléctricos
en la industria. La mejora del rendimiento del sistema de accionamiento, incluyendo la
aplicación, es un asunto primordial puesto que el potencial ahorro energético total de un
sistema optimizado se estima que puede ser entre el 30 % y el 60 %.
Otra de las ampliaciones de este estudio es la relación que se puede establecer
teniendo en cuenta el tipo constructivo de la carcasa o frame de la máquina, según sea
de acero, aluminio o fundición de hierro, debido a que influyen decisivamente en el
peso de la máquina y éste es uno de los factores que se tienen en cuenta a la hora de
estimar el momento de inercia.
Se hace además una clasificación según los parámetros: fabricante, frecuencia,
velocidad de sincronismo, peso y potencia del motor, indicando en cada uno de los
apartados el tamaño de la muestra en cuanto a número de máquinas analizadas.
2.4
NORMAS Y REFERENCIAS
2.4.1 Disposiciones legales y normas aplicadas
-NORMA UNE 60034:30/2010. Versión oficial en español de la Norma Europea
EN 60034:30/2009 que a su vez adopta la Norma Internacional IEC 60034:30/2008, por
la que se especifican las clases de rendimiento para los motores trifásicos de inducción
de jaula de velocidad única, de 50 y 60 Hz.
-NORMA UNE 60034-02-01 por la que se establecen los rendimientos a partir de
ensayos y también para especificar métodos para obtener pérdidas específicas en
máquinas eléctricas rotativas (excepto las máquinas para vehículos de tracción).
-REGLAMENTO CE 640/2009 de la Comisión del 22 de Julio de 2009 por el
que se aplica la Directiva 2005/32/CE del Parlamento Europeo y del Consejo en lo
relativo a los requisitos de diseño ecológico para los motores eléctricos.
-NORMA UNE 157001 por la que establecen los criterios generales para la
elaboración de proyectos.
2.4.2 Bibliografía
- Aspectos básicos del Electromagnetismo. Miguel Ángel Rodríguez Pozueta.
http://personales.unican.es/rodrigma/primer/publicaciones.htm
- Máquinas asíncronas. Miguel Ángel Rodríguez Pozueta.
http://personales.unican.es/rodrigma/primer/publicaciones.htm
- Constitución de las máquinas eléctricas. Miguel Ángel Rodríguez Pozueta.
http://personales.unican.es/rodrigma/primer/publicaciones.htm
12
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
- Regresión lineal simple. Josep Gibergans Bàguena.
www.uoc.edu
- Estadística. Métodos y aplicaciones. Variables bidimensionales. Regresión.
Universidad de Málaga.
http://www.bioestadistica.uma.es/libro/
- Regresión lineal. Ditutor
http://www.ditutor.com/estadistica_2/regresion.html
2.4.3 Programa de cálculo
- Paquete integrado de Microsoft Office (Excel, Access, Word, Power Point)
- Minitab 16. Software de computadora diseñado para ejecutar funciones
estadísticas básicas y avanzadas.
2.4.4 Otras referencias
La obtención de los catálogos de fabricantes de las máquinas analizadas se hace
por Internet a través de su página web:
2.5
• ABB
http://www.abb.com
• CMG
http://www.cmggroup.com.au
• LEROY SOMER
http://www.leroy-somer.com
• MARELLI
http://www.marellimotori.com
• ROSSI
http://www.rossi-group.com
• SIEMENS
http://www.siemens.com
• VEM
http://www.vem-group.com
• WEG
http://www.weg.net
DEFINICIONES Y ABREVIATURAS
No es de aplicación en este proyecto
2.6
REQUISITOS DE DISEÑO
La finalidad del presente proyecto es proponer un método para la estimación del
momento de inercia de las máquinas de inducción trifásicas partiendo solamente para
cada una de ellas de los datos correspondientes al peso total, M, y la altura del eje, h,
sin tener que recurrir a otros sistemas o realizar ensayos experimentales.
Este método se justifica en situaciones en las que se necesita conocer el momento
de inercia y este dato no está facilitado por el fabricante porque no lo ha incluido en el
13
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
catálogo, en las especificaciones del manual de instrucciones o bien no se dispone del
catálogo de la máquina objeto del estudio. Esto puede ocurrir sobre todo cuando la
máquina es de baja potencia, motivo por el que el estudio se realiza partiendo de una
muestra con máquinas desde 0.045 kW. El fabricante no suele facilitar el momento de
inercia en la placa de características.
También se justifica cuando no se puede o no se quiere recurrir a métodos o
ensayos experimentales que son más complejos, dificultosos y se requiere de más
medios y tiempo para realizarlos.
Se requiere que el método se caracterice por su sencillez y rapidez en la
ejecución, puesto que sólo se necesita conocer dos características físicas de la máquina
como son el peso y la altura del eje. Estos datos sí se especifican generalmente en la
placa de características y si no fuera así, son fácilmente cuantificables recurriendo a
métodos de medida convencionales.
Fig. 2.2. Placa de características de una máquina con los datos del peso y altura del eje.
Existen varios tipos de máquinas eléctricas rotativas y la constitución general
(estátor, rotor y entrehierro) puede ser muy diferente entre ellas, sobre todo en lo
referido a los aspectos físicos y constructivos. Ya se ha detallado que el peso y la altura
del eje de la máquina determinan el método propuesto para la estimación del momento
de inercia. Para que dicho método resulte o se aproxime lo máximo posible al momento
de inercia real, es preciso delimitar la muestra a aquellas máquinas que tengan esos
aspectos constructivos lo más homogéneos posible.
En la práctica, las máquinas trifásicas de inducción con rotor en jaula de ardilla
suponen un porcentaje muy destacado de uso o utilización dentro de toda la gama de
máquinas eléctricas rotativas. Ésta es la causa principal por la que el método propuesto
para la estimación del momento de inercia se circunscriba a la muestra obtenida de este
tipo de máquinas, como ya había establecido previamente el Dr. Jaramillo.
Los datos necesarios de partida para el estudio del método no serán
experimentales, sino que deben ser proporcionados por los propios fabricantes a través
de sus últimos catálogos actualizados con la finalidad de cumplir con todos los
14
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
requisitos referentes a normas y directivas de homologación que afectan a este tipo de
máquinas, sobre todo las relacionadas con el etiquetado y la eficiencia energética.
La elección de los fabricantes representados en la muestra se establecerá de forma
que tengan relevancia dentro de su sector, sobre todo en el mercado europeo y
americano.
Con la finalidad de poder establecer las relaciones que puedan ayudar en el
proceso de elaboración del método para la estimación del momento de inercia, los datos
obtenidos del catálogo del fabricante se establecen en dos categorías: datos principales o
relevantes y datos secundarios o auxiliares y son los siguientes:
Datos principales:
•
Momento de inercia J (kg.m²)
•
Peso M (kg)
•
Altura del eje h (m)
•
Potencia nominal (kW).
•
Velocidad nominal (rpm)
•
Nº de polos
•
Frecuencia (Hz)
•
Eficiencia (IE)
•
Fabricante
•
Rendimiento (η)
•
Tipo de carcasa
Datos auxiliares:
•
Factor de potencia (cosφ)
•
Tensión nominal (V)
•
Intensidad nominal (A)
•
Intensidad de arranque/Intensidad nominal (IA/IN)
•
Par nominal (N·m)
•
Par de arranque/Par nominal (MA/MN)
•
Par máximo/Par nominal (MK/MN)
•
Nivel de presión sonora (dB)
•
Año catálogo
15
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Una vez obtenidos todos los datos que se acaban de detallar, de los catálogos de
los propios fabricantes es necesario establecer un método de análisis y relación entre los
distintos parámetros y las variables momento de inercia (J), masa, (M) y altura del eje
(h) y también la forma de representar estas relaciones gráficamente.
2.7
ANÁLISIS DE SOLUCIONES
No es de aplicación en este proyecto
2.8
RESULTADOS FINALES
2.8.1 Momento de inercia de un cilindro
El momento de inercia es una medida de la propiedad que tiene un cuerpo de no
modificar su estado de reposo o movimiento si no es por la acción de una fuerza. Esta
medida se refiere a la inercia rotacional de un cuerpo. Es una característica propia de
dicho cuerpo referido a su eje de giro y su valor refleja la suma integral de los productos
de las masas de las partículas por el cuadrado de la distancia de cada partícula a dicho
eje.
Si el rotor de la máquina de inducción trifásica fuera perfectamente cilíndrico y
homogéneo (es decir constituido por un único material de densidad constante), podría
calcularse su momento de inercia a partir de la masa de capas cilíndricas diferenciales,
tal como se observa en la Fig. 2.3.
Se toma un elemento de masa que dista x del eje de rotación. El elemento es una
capa cilíndrica cuyo radio interior es x, exterior x+dx, y de longitud L, tal como se
muestra en la Fig (2.3).
dx Z .
.
rrr
rrrrr
r x R L
Fig. 2.3 Momento de inercia de un cilindro homogéneo
16
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
La masa dm que contiene esta capa es:
dm =
M
2M
2πxdx ⋅ L = 2 xdx
2
πR L
R
(2.1)
El momento de inercia del cilindro es:
R
2M 3
1
2
J = ∫ x dm = ⌠
⎮ 2 x dx = MR
⌡ R
2
2
(2.2)
0
En el caso de que el rotor de una máquina de inducción fuera perfectamente
cilíndrico y homogéneo ( M = M r y R = r ), el cálculo del momento de inercia del
mismo vendría determinado por la expresión:
J=
1
Mr ⋅ r2
2
(2.3)
2.8.2 Par y momento de inercia
En los accionamientos eléctricos con motores de inducción trifásicos con rotor en
jaula de ardilla, el par motor que desarrollan éstos debe superar en el arranque al par
resultante de la suma de tres pares resistentes: el par de la carga mecánica, el par de
inercia del propio rotor y de la carga mecánica y por último, el par que corresponde al
rozamiento. De esta forma, la ecuación mecánica correspondiente a estos
accionamientos sería la siguiente:
Γ = ΓL +
d
([ J + J L ] ⋅ ω ) + B ⋅ ω
dt
Donde:
Γ
par motor,
17
(2.4)
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
ΓL
par resistente de la carga mecánica,
J
momento de inercia de la máquina de inducción,
JL
momento de inercia de la carga mecánica,
B
coeficiente de rozamiento
ω
velocidad angular del eje.
En este tipo de máquinas, cuando el rotor es en jaula de ardilla, se acostumbra a
despreciar el coeficiente de rozamiento (B = 0), puesto que no existe ningún elemento
como las escobillas que asegure la conexión eléctrica del circuito eléctrico del rotor. En
consecuencia el único rozamiento sería el imputable a los rodamientos.
Si JT es el momento de inercia correspondiente al conjunto del accionamiento, es
decir, la suma del momento de inercia de la máquina de inducción más el momento de
inercia de la carga mecánica (J + JL) y consideramos la hipótesis de que J no varía en el
tiempo, entonces la fórmula (2.4) se puede expresar de la siguiente forma:
Γ − Γ L = JT ⋅
dω
dt
(2.5)
Para poder solucionar la ecuación (2.5) se necesita conocer el momento de inercia
de la máquina de inducción J, y de la carga mecánica JL. El momento de inercia de la
máquina de inducción J no siempre lo proporciona el fabricante y para ello se ha
llevado a cabo un análisis de 2624 máquinas comprendidas entre 0.045 kW y 1000 kW
de potencia de forma que permita determinar un método para conocerlo de una manera
rápida y sencilla. Este análisis comprende el estudio de las características constructivas
y eléctricas de dichas máquinas donde sí se conoce el dato del momento de inercia, que
está facilitado en el catálogo del fabricante.
Fig. 2.4. Altura del eje (h) necesaria para la estimación del momento de inercia de la máquina
18
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Sin embargo el fabricante, generalmente, no suele facilitar en las especificaciones
de las máquinas de inducción la masa del rotor (Mr) ni el radio del mismo (r). Lo que sí
suele aparecer en los catálogos es la masa total de la máquina (M) y la altura del eje de
giro (h) representada en la Fig. 2.4. Si el fabricante no los incluyera en el catálogo,
generalmente sí lo hace en la placa de características o se pueden conocer con relativa
facilidad midiéndolos directamente sobre la máquina.
Serán por tanto estas dos características constructivas M y h las que se van a
utilizar para determinar el método para la estimación del momento de inercia, J, de la
máquina de inducción trifásica con rotor en jaula de ardilla.
Partiendo de (2.3) y estableciendo un análisis comparativo entre Jr y J se pueden
suponer dos relaciones lineales: una entre el radio del rotor y la altura del eje de la
máquina (r=α·h) y la otra entre la masa del rotor y la masa total de la máquina (Mr
=α´·M). Es decir,
1
1
J = ⋅ (α ´⋅M ) ⋅ (α ⋅ h) 2 = ⋅ α ´.α 2 .( M ⋅ h 2 )
2
2
(2.6)
1
a = ⋅ α ´⋅α 2
2
(2.7)
J = a ⋅ M ⋅ h2
(2.8)
Donde:
Por tanto:
J
Momento de inercia de la máquina (kg.m²)
a
coeficiente de relación entre J y (M·h²)
M
Masa de la máquina (kg)
h
Altura del eje (m)
2.8.3 Relación entre el peso y la altura de la máquina con su momento de inercia
Una vez establecida la expresión (2.8) y ver que se corresponde con la ecuación
de una recta que pasa por el origen de coordenadas, se trata de determinar el valor del
coeficiente “a” y comprobar que el grado de correlación de la recta estimada tiene
validez y fiabilidad. Para ello se parte de una muestra, obtenida a partir de catálogos
actualizados, de la que se han obtenido el momento de inercia, el peso y la atura del eje
de 2624 máquinas de inducción trifásicas con rotor en jaula de ardilla. Los máquinas
son de diferentes fabricantes (ABB, CMG, Leroy Somer, Marelli, Rossi, Siemens, VEM
y WEG), potencias entre 0.045 kW y 1000 kW, nº de polos entre 2 y 8, frecuencias de
50 Hz y 60 Hz, pesos entre 3.5 kg y 4800 kg y alturas de eje entre 56 mm y 450 mm.
19
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Fig.2.4. Máquinas de inducción de diferentes tipos y tamaños.
2.8.4 Determinación del método
Se trata de definir un modelo que describa la relación entre las variables J y M∙h²
con el propósito de predecir los valores de una (J) a partir de los valores de la otra
(M∙h²).
A partir de un conjunto de observaciones de las dos variables (J y M∙h²) sobre la
muestra de las máquinas obtenida de los catálogos, el primer paso es representar esos
datos en unos ejes de coordenadas y ver de qué forma se distribuyen espacialmente los
pares de valores seleccionados. Una vez hecho, la representación gráfica que muestra es
la siguiente:
50
40
J (kg.m²)
Real
30
20
10
0
0
200
400
600
M·h² (kg.m²)
800
Muestra: 2624 máquinas
Fig.2.5. Momento de inercia en función de M·h2 para toda la muestra de máquinas.
20
1000
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Como ya era de esperar aparece una tendencia lineal para la muestra de las 2624
máquinas entre J y M·h2. Por tanto se estimará el momento de inercia a partir de un
modelo matemático de la regresión lineal simple.
En una regresión lineal, la representación gráfica o diagrama de dispersión puede
ayudar además a encontrar algún valor atípico entre los datos de la muestra que pueda
tener su origen en un error en la toma de datos de la muestra o a una máquina
excepcional dentro de las analizadas. Una vez hecho el diagrama de dispersión, el
siguiente paso es encontrar la ecuación de la recta que mejor se ajusta a la nube de
puntos, es decir, la recta de regresión.
La ecuación de una recta de regresión es de la forma:
y = ax + b
(2.9)
Donde:
y
J (variable dependiente)
x
M∙h² (variable independiente)
a
pendiente de la recta
b
ordenada en el origen de la recta
2.8.4.1 Interpretación de los parámetros de la recta de regresión.
Una vez determinada la recta de regresión es muy importante interpretar los
parámetros de la ecuación en el contexto del fenómeno que se estudia.
• Interpretación de la pendiente de la recta a:
Este parámetro representa la estimación del incremento de la variable y (J) cuando
x (M∙h²) aumenta en una unidad. Este parámetro nos informa de cómo están
relacionados las dos variables en el sentido de que nos indica en qué cantidad (y si es
positiva o negativa) varían los valores de y (J) cuando varían los valores de x (M∙h²) en
una unidad. A este parámetro se llama coeficiente de regresión.
• Interpretación de la ordenada en origen b
Este parámetro representa la estimación del valor de y (J) cuando x (M∙h²) es igual
a 0 (punto de corte con el eje de abscisas).
No siempre tiene una explicación práctica. Para que esto sea posible, es preciso
que:
21
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1. Que x tome el valor x = 0, hecho que implicaría tener una máquina con: una
masa total igual a 0, una altura de eje igual a cero, o ambas condiciones
simultáneamente. Es imposible que ocurra cualquiera de las tres opciones.
2. Se tengan suficientes observaciones cercanas al valor 0. Esta es una apreciación
relativa, el estar cerca o lejos no es una apreciación absoluta sino relativa. En
cualquier caso se han seleccionado máquinas que representan una amplia gama
de valores tanto en J como en M·h².
2.8.5 La calidad del ajuste
2.8.5.1 Introducción
La recta de regresión por mínimos cuadrados minimiza la suma de los cuadrados
de los residuos o errores. La pregunta es si este ajuste es lo bastante bueno. Mirando si
en el diagrama de dispersión los puntos experimentales quedan muy cerca de la recta de
regresión obtenida, se puede tener una idea de si la recta se ajusta o no a los datos, pero
hace falta un valor numérico que ayude a precisarlo.
2.8.5.2 El coeficiente de determinación, r²
Se quiere evaluar en qué grado el modelo de regresión lineal que se ha obtenido a
partir del conjunto de datos explica las variaciones que se producen en la variable
dependiente (en este caso J). La medida más importante de la bondad del ajuste es el
coeficiente de determinación r². Este coeficiente indica el grado de ajuste de la recta
de regresión a los valores de la muestra, y se define como la proporción de varianza
explicada por la recta de regresión, es decir:
r2 =
Varianza expresada por la recta de regresión
Varianza total de los datos
(2.10)
Varianza: Media aritmética del cuadrado de las desviaciones respecto a la media
de una distribución estadística.
El coeficiente de determinación lineal siempre estará comprendido entre 0 y 1:
0 ≤ r² ≤ 1, de manera que:
• r² = 1 Cuando el ajuste es perfecto, es decir, cuando todos los puntos se
encuentran sobre la recta de regresión.
• r² = 0 Denota la inexistencia de relación entre las variables x (M∙h²) e y (J).
• Puesto que r² explica la proporción de variabilidad de los datos que queda
explicada por el modelo de regresión, cuanto más cercano a la unidad esté,
mejor es el ajuste.
22
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.8.5.3 Coeficiente de correlación muestral, r.
A partir del diagrama de dispersión se puede ver si hay algún tipo de relación
entre dos variables x e y. Se suele decir que x e y tienen una relación positiva si los
valores grandes x están aparejados con valores grandes y valores pequeños de x con
valores pequeños de y. De manera análoga, se dice que x e y tienen una relación
negativa si los valores grandes de x están aparejados con los valores pequeños de y y
viceversa.
Por tanto, el coeficiente de correlación mide el grado de asociación entre dos
variables.
El coeficiente de correlación se caracteriza por:
-1 ≤ r ≤ 1 de manera que:
• r = 1 o r = -1 cuando haya una asociación lineal entre las variables.
• -1 < r < 1 cuando la relación entre las dos variables no sea lineal de forma
exacta.
• Una regla razonable es decir que la relación es débil si 0 < r < 0,5; fuerte si
0,8 < r < 1, y moderada si tiene cualquier otro valor.
2.8.6 Análisis conjunto de todas las máquinas de la muestra
El primer análisis se realiza con todas las máquinas de inducción trifásicas que
componen la muestra, para comprobar si en su conjunto la relación entre J y M·h2 tiene
un comportamiento razonablemente lineal. En la Fig. 2.6 se muestra mediante un punto
cada una de las máquinas que compone la muestra, así como la recta de regresión
obtenida.
En la Tabla 8.1 se muestran las características generales de toda la muestra y los
parámetros vinculados a la regresión lineal de la misma: tamaño de la muestra,
coeficiente de correlación lineal, coeficiente de determinación lineal, coeficiente de
regresión o pendiente de la recta de regresión y ordenada en origen de la recta de
regresión.
23
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
50
40
J (kg.m²)
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
Muestra: 2624 máquinas
M·h² (Kg.m²)
Fig.2.6. Momento de inercia en función de M·h2 para toda la muestra de máquinas y recta de regresión
correspondiente.
Tabla 2.1. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y
ordenada en origen (b) para la estimación del momento de inercia en la totalidad de la muestra de máquinas.
n
2624
r
r²
a
b
0.9361
0.8765
0.0375
-0.0023
Teniendo en cuenta lo detallado sobre la calidad del ajuste del método elegido
para la estimación del momento de inercia, el siguiente paso es observar si se cumplen
las condiciones que determinan la calidad del ajuste.
En este análisis se obtiene un coeficiente de determinación r2 de 0.8765, que nos
indica que el 87.65% de la varianza queda explicada por la recta de regresión, o lo que
es lo mismo, el 87.65% de la variación del momento de inercia J de toda la muestra de
máquinas, se explica a través del comportamiento de M·h2.
Se observa que el grado del ajuste de la recta de regresión a los valores de la muestra es
cercano a 1, por tanto, indica que se trata de un buen ajuste.
Se observa que entre las variables J y M·h² existe un fuerte grado de relación
(r = 0.9361) y tienen una relación positiva, puesto que los valores elevados de J están
aparejados con valores elevados de M·h² y viceversa.
Por lo tanto, en vista de los resultados analizados, se puede afirmar que tiene
validez el método propuesto para la estimación del momento de inercia de las máquinas
de inducción trifásicas con rotor en jaula de ardilla partiendo de los datos del peso y la
altura del eje.
24
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.8.7 Agrupación de la muestra por familias
Para poder realizar posteriores comparaciones, se toman 50 y 1000 como valores
máximos de las escalas de los ejes de coordenadas puesto que se corresponden con los
valores máximos que pueden tomar los parámetros J y M·h².
Debido a que en alguna de las clasificaciones, los datos de J y M·h² pueden tomar
unos valores muy pequeños con respecto a los valores máximos, se representarán
además de la escala establecida, en otra más reducida para poder apreciar la disposición
de los datos con mejor detalle.
A continuación se van a establecer distintas agrupaciones de máquinas, donde los
datos obtenidos se mostrarán en tablas y se representarán gráficamente en figuras sobre
ejes de coordenadas.
Aunque con la muestra completa de las 2624 máquinas se han obtenido unos
coeficientes de determinación y correlación lineal que se pueden considerar
suficientemente satisfactorios, en la Fig. 2.6 se observa que los puntos parecen
agrupados por familias, de tal modo que la muestra total se asemeja a un abanico, donde
quedan más marcadas ciertas zonas semejantes a las varillas del mismo. Es decir, parece
que ciertas familias de puntos pudieran agruparse, y por tanto estimarse, mediante rectas
con mejores coeficientes de correlación y determinación.
Es necesario por tanto, y a priori, determinar las características de la máquina que
aparecen en el catálogo del fabricante que pueden servir para explicar el
comportamiento de estos subgrupos de la muestra. Para ello se han escogido aquellas
características que han parecido tener más relación con el momento de inercia:
velocidad de sincronismo (que a su vez depende del número de polos y de la
frecuencia), peso y tipo de carcasa, para observar si estas agrupaciones se correspondían
con las observadas con toda la muestra completa.
Puesto que ya se iba a estudiar la muestra total por familias, y suponiendo
también, a priori, que hay ciertas características que no tienen influencia en el momento
de inercia, se ha querido constatar que así es, y por tanto también se ha realizado
agrupaciones de la muestra por: fabricante, potencias, altura del eje y eficiencia.
2.8.8 Velocidad de sincronismo
En este caso la muestra total contiene máquinas con 8 velocidades de sincronismo
diferentes:
•
3600 rpm:
211 máquinas. (Fig. 2.7).
•
3000 rpm:
572 máquinas. (Fig. 2.8).
•
1800 rpm:
215 máquinas. (Fig. 2.9).
•
1500 rpm:
588 máquinas. (Fig. 2.10).
•
1200 rpm:
162 máquinas. (Fig. 2.11).
•
1000 rpm:
478 máquinas. (Fig. 2.12).
•
900 rpm:
119 máquinas. (Fig. 2.13).
•
750 rpm:
279 máquinas. (Fig. 2.14).
25
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Por tanto, se analizan cada una de estas 8 familias por separado, haciendo un
estudio de regresión lineal para cada una de ellas y obteniendo los coeficientes r y r²
que se muestran en la Tabla (2.2)
3600 rpm
50
40
Real
Estimado
J(kg.m²)
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 211máquinas
Fig. 2.7. Momento de inercia en función de M·h2 para máquinas con una velocidad de sincronismo de 3600 rpm.
3000 rpm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
26
800
1000
Muestra: 572 máquinas
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Fig. 2.8. Momento de inercia en función de M·h2 para máquinas con una velocidad de sincronismo de 3000 rpm.
1800 rpm
50
40
Real
Estimado
J(kg.m²)
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 215 máquinas
Fig. 2.9. Momento de inercia en función de M·h2 para máquinas con una velocidad de sincronismo de 1800 rpm.
1500 rpm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 588 máquinas
Fig. 2.10. Momento de inercia en función de M·h2 para máquinas con una velocidad de sincronismo de 1500 rpm.
27
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1200 rpm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 162 máquinas
2
Fig. 2.11. Momento de inercia en función de M·h para máquinas con una velocidad de sincronismo de 1200 rpm.
1000 rpm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 478 máquinas
Fig. 2.12. Momento de inercia en función de M·h2 para máquinas con una velocidad de sincronismo de 1000 rpm.
28
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
900 rpm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(Kg.m²)
800
1000
Muestra: 119 máquinas
Fig. 2.13. Momento de inercia en función de M·h2 para máquinas con una velocidad de sincronismo de 900 rpm.
750 rpm
50
J(kg.m²
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 279 máquinas
Fig. 2.14. Momento de inercia en función de M·h2 para máquinas con una velocidad de sincronismo de 750 rpm.
29
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
50
750
900
1000
1200
1500
1800
3000
3600
J(kg.m²)
40
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.15. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su
velocidad de sincronismo.
Tabla 2.2. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y
ordenada en origen (b) para la estimación del momento de inercia en máquinas según su velocidad de sincronismo.
Frecuencia
50 Hz
60 Hz
ns
n
r2
r
a
b
3000
572
0.9856
0.9715
0.0207
-0.0808
1500
588
0.9948
0.9898
0.0310
0.0121
1000
478
0.9887
0.9776
0.0459
0.0074
750
279
0.9835
0.9673
0.0446
0.1188
3600
211
0.9861
0.9724
0.0248
-0.0269
1800
215
0.9742
0.9492
0.0378
0.0551
1200
162
0.9846
0.9696
0.0549
0.1388
900
119
0.9918
0.9838
0.0728
-0.2960
Se observa con esta clasificación que, como se suponía, agrupando la muestra
total en función de la velocidad de sincronismo, se obtienen resultados notablemente
mejores de los coeficientes de determinación y correlación que con el estudio de la
muestra completa sin clasificar, lo que corrobora los pronósticos iniciales de que el
momento de inercia está fuertemente vinculado con la velocidad de sincronismo.
Si se representan agrupadas las rectas de regresión obtenidas anteriormente en una
misma gráfica (Fig.2.15), se confirma la disposición de las mismas como las varillas de
abanico que se intuía al observar la gráfica inicial con la totalidad de la muestra y los
datos sin agrupar.
30
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.8.9 Tipo de carcasa
La muestra está compuesta por máquinas con tres tipos de carcasa diferentes:
•
Acero:
68 máquinas. Fig. (2.16)
•
Aluminio:
677 máquinas. Fig. (2.17)
•
Hierro:
1879 máquinas. Fig.(2.18)
•
Se analizan los datos de cada familia, se hace el estudio de regresión lineal para
cada una de ellas y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la Tabla (2.3)
Acero
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M.h²(kg.m²)
800
1000
Muestra: 68 máquinas
Fig. 2.16. Momento de inercia en función de M·h2 para máquinas con carcasa de acero.
31
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Aluminio
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M.h²(kg.m²)
800
1000
Muestra: 677 máquinas
2
Fig. 2.17. Momento de inercia en función de M·h para máquinas con carcasa de aluminio.
Hierro
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M.h²(kg.m²)
800
Muestra: 1879 máquinas
Fig. 2.18. Momento de inercia en función de M·h2 para máquinas con carcasa de hierro.
32
1000
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
50
Acero
40
J(kg.m²)
Aluminio
30
Hierro
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.19. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su tipo de
carcasa.
Tabla 2.3. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y
ordenada en origen (b) para la estimación del momento de inercia en máquinas según el tipo de carcasa.
Tipo carcasa
n
r
r2
a
b
Acero
68
0.8757
0.7670
0.0350
0.1670
Aluminio
677
0.9366
0.8773
0.0347
-0.0104
Hierro
1879
0.9318
0.8683
0.0376
0.0103
Con esta clasificación se observa que no existen diferencias apreciables en los
parámetros más importantes (sobre todo en la pendiente a) que determinan la estimación
del momento de inercia según el tipo de carcasa por lo que no se puede afirmar que el
momento de inercia de una máquina esté vinculado con el tipo de carcasa de la misma
en esta muestra. Hay que señalar, sin embargo, que en esta clasificación el número de
máquinas es muy diferente para las tres familias de carcasa: 68 de acero, 677, de
aluminio y 1879 de hierro.
33
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.8.10 Fabricante.
La muestra total se compone por máquinas de 8 fabricantes diferentes:
• ABB:
570 máquinas. Fig. (2.20).
• CMG:
47 máquinas. Fig. (2.21).
• Leroy Somer:
349 máquinas. Fig. (2.22).
• Marelli:
206 máquinas. Fig. (2.23).
• Rossi:
197 máquinas. Fig. (2.24).
• Siemens:
450 máquinas. Fig. (2.25).
• VEM:
216 máquinas. Fig. (2.26).
• WEG:
589 máquinas. Fig. (2.27).
Se analizan los datos de cada familia, se hace el estudio de regresión lineal para
cada una de ellas y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la tabla (2.4)
ABB
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²) Muestra: 570 máquinas
Fig. 2.20. Momento de inercia en función de M·h2 para máquinas fabricadas por ABB
34
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
CMG
50
J (kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 47 máquinas
Fig. 2.21. Momento de inercia en función de M·h2 para máquinas fabricadas por CMG.
LEROY SOMER
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M.h²(kg.m²)
800
1000
Muestra: 349 máquinas
Fig. 2.22. Momento de inercia en función de M·h2 para máquinas fabricadas por Leroy Somer.
35
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
MARELLI
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 206 máquinas
Fig. 2.23. Momento de inercia en función de M·h2 para máquinas fabricadas por Marelli.
ROSSI
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 197 máquinas
Fig. 2.24. Momento de inercia en función de M·h2 para máquinas fabricadas por Rosssi.
36
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
SIEMENS
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 450 máquinas
Fig. 2.25. Momento de inercia en función de M·h2 para máquinas fabricadas por Siemens.
VEM
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M.h²(kg.m²)
800
1000
Muestra: 216 máquinas
Fig. 2.26. Momento de inercia en función de M·h2 para máquinas fabricadas por VEM.
37
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
WEG
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 589 máquinas
Fig. 2.27. Momento de inercia en función de M·h2 para máquinas fabricadas por WEG.
ABB
50
CMG
L.SOMER
40
ROSSI
SIEMENS
J(kg.m²)
30
VEM
20
WEG
MARELLI
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.28. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según el
fabricante que la produce.
38
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Tabla 2.4. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según el fabricante.
Fabricante
n
r
r2
a
b
ABB
570
0.9550
0.9122
0.0352
-0.0359
CMG
47
0.9003
0.8107
0.0367
-0.1577
L. Somer
349
0.9411
0.8858
0.0404
-0.3247
Marelli
206
0.9227
0.8515
0.0396
-0.1005
Rossi
197
0.9646
0.9306
0.0313
0.0005
Siemens
450
0.9491
0.9009
0.0364
-0.0624
VEM
215
0.9267
0.8589
0.0323
-0.0527
WEG
589
0.9112
0.8303
0.0487
-0.0975
Se observa con esta clasificación que la disposición de los datos y la pendiente
de la recta es bastante similar para cualquier fabricante, excepto para las máquinas
producidas por WEG, que se diferencia claramente de los demás, aunque examinando
con más detalle los datos de esta clasificación, se observa que toda la muestra analizada
de este fabricante está compuesta por máquinas que funcionan a una frecuencia 60 Hz,
lo que indica que las velocidades de sincronismo son más elevadas y, como se ha visto
en la Tabla (2.2), las pendientes de las rectas (a), también son más elevadas con las
velocidades de sincronismo correspondientes a 60 Hz que las correspondientes a 50 Hz,
por lo que se puede suponer que, más bien ése es el motivo de la diferencia observada
en la gráfica.
Se podría concluir, por tanto, que el momento de inercia de una máquina no está
determinado por el fabricante que la produce.
2.8.11 Potencia.
En este caso la muestra está formada por máquinas clasificadas en cuatro tramos
diferentes de potencias:
•
0
-
1 kW: 265 máquinas. Fig. (2.29) y (2.30).
•
1.1
-
10 kW: 710 máquinas. Fig. (2.31) y (2.32).
•
11
-
100 kW: 967 máquinas. Fig. (2.33) y (2.34).
•
101
-
1000 kW: 682 máquinas. Fig. (2.35).
Se analizan los datos de cada familia, se hace el estudio de regresión lineal para
cada una de ellas y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la tabla (2.5).
39
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
0 - 1 kW
50
Real
40
Estimado
J (Kg.m²)
30
20
10
0
0
200
400
600
M·h² (Kg.m²)
800
1000
Muestra: 265 máquinas
Fig. 2.29. Momento de inercia en función de M·h2 para máquinas con potencias comprendidas entre 0 y 1 kW.
0 - 1 kW
0,03
Real
Estimado
J (Kg.m²)
0,02
0,01
0
0
0,2
0,4
0,6
M·h² (Kg.m²)
Muestra: 265 máquinas
Fig. 2.30. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con potencias
comprendidas entre 0 y 1 kW.
40
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1.1 - 10 kW
50
40
Real
Estimado
J (kg.m²)
30
20
10
0
0
200
400
600
M·h² (Kg.m²)
800
1000
Muestra: 710 máquinas
Fig. 2.31. Momento de inercia en función de M·h2 para máquinas con potencias comprendidas entre 1.1 y 10
kW.
1.1 - 10 kW
0,4
Real
0,3
J (kg.m²)
Estimado
0,2
0,1
0
0
2
4
M·h² (Kg.m²)
6
8
Muestra: 710 máquinas
Fig. 2.32. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con potencias
comprendidas entre 1.1 y 10 kW.
41
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
11 - 100 kW
50
40
Real
Estimado
J(kg.m²)
30
20
10
0
0
200
400
600
800
1000
M.h²(kg.m²) Muestra: 967 máquinas
Fig. 2.33. Momento de inercia en función de M·h2 para máquinas con potencias comprendidas entre 11 y 100
kW.
11 - 100 kW
6
Real
J(kg.m²)
4
Estimado
2
0
0
20
40
60
80
100
120
M.h²(kg.m²) Muestra: 967 máquinas
Fig. 2.34. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con potencias
comprendidas entre 11 y 100 kW.
42
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
101 - 1000 kW
50
J (Kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M·h² (Kg.m²) Muestra: 682 máquinas
Fig.2.35. Momento de inercia en función de M·h2 para máquinas con potencias comprendidas entre 101 y
1000 kW.
50
0-1 kW
1.1-10 kW
J(kg.m²)
40
11-100 kW
101-1000 kW
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.36. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su
potencia.
43
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Tabla 2.5. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su potencia.
Potencia
n
r
r2
a
b
0 – 1 kW
265
0.9440
0.8913
0.0293
-0.0002
1.1 – 10 kW
710
0.9140
0.8355
0.0417
-0.0074
11 – 100 kW
967
0.9182
0.8341
0.0419
-0.1155
101 – 1000 kW
682
0.8781
0.7711
0.0372
0.1161
Mediante la observación de los datos obtenidos para esta clasificación, no se
puede afirmar que la potencia de la máquina sea un factor determinante del momento de
inercia de la misma. En un principio, los datos parecen indicar que, proporcionalmente,
a mayor potencia, menor momento de inercia, pero esa regla ya no se cumple si se trata
de máquinas con potencias grandes, comprendidas entre 101 y 1000 kW.
2.8.12 Peso.
La muestra total se compone por cuatro tramos diferentes de peso de las
máquinas:
•
0
-
50 kg. Fig. (2.37) y (2.38)
•
51
-
200 kg. Fig. (2.39) y (2.40).
•
201
-
1000 kg. Fig. (2.41) y (2.42).
•
1001
-
5000 kg. Fig. (2.43)
Se analizan los datos de cada familia, se hace el estudio de regresión lineal para
cada una de ellas y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la tabla (2.6).
44
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
0 - 50 kg
50
Real
Estimado
J (kg.m²)
40
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²) Muestra: 753 máquinas
Fig. 2.37. Momento de inercia en función de M·h2 para máquinas con pesos comprendidas entre 0 y 50 kg.
0 - 50 kg
0,08
Real
Estimado
J (kg.m²)
0,06
0,04
0,02
0
0
0,5
M·h²(kg.m²)
1
1,5
Muestra: 753 máquinas
Fig. 2.38. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con pesos
comprendidas entre 0 y 50 kg.
45
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
51 - 200 kg
50
Real
J (kg.m²)
40
Estimado
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²) Muestra: 576 máquinas
Fig. 2.39. Momento de inercia en función de M·h2 para máquinas con pesos comprendidas entre 51 y 200 kg.
51 - 200 kg
0,6
Real
J (kg.m²)
Estimado
0,4
0,2
0
0
2
4
6
8
10
12
M·h²(kg.m²) Muestra: 576 máquinas
Fig. 2.40. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con pesos
comprendidas entre 51 y 200 kg.
46
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
201 - 1000 kg
50
Real
J (kg.m²)
40
Estimado
30
20
10
0
0
200
400
600
800
1000
M·h² (kg.m²) Muestra:768 máquinas
Fig. 2.41. Momento de inercia en función de M·h2 para máquinas con pesos comprendidas entre 201 y 1000
kg.
201 - 1000 kg
6
Real
Estimado
J (kg.m²)
4
2
0
0
20
40
60
80
100
120
M·h² (kg.m²) Muestra:768 máquinas
Fig. 2.42. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con pesos
comprendidas entre 201 y 1000 kg.
47
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1001 - 5000 kg
50
Real
Estimado
J (kg.m²)
40
30
20
10
0
0
200
400
600
800
1000
M·h² (kg.m²) Muestra: 539 máquinas
Fig. 2.43. Momento de inercia en función de M·h2 para máquinas con pesos comprendidas entre 1001 y 5000
kg.
50
0 ‐ 50 kg
40
51 ‐ 200 kg
J(kg.m²)
201‐1000 kg
30
1001‐5000 kg
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.44. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su peso.
48
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Tabla 2.6. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su peso.
Peso
n
r2
r
a
b
0 – 50 kg
753
0.8949
0.8009
0.0275
-0.0003
51 – 200 kg
575
0.7872
0.6197
0.0317
-0.0049
201 – 1000kg
769
0.8264
0.6830
0.0349
-0.0199
1001 – 5000 kg
527
0.8515
0.7251
0.0363
0.5442
Tanto los datos numéricos como gráficos indican claramente que el momento de
inercia de la máquina es directamente proporcional a su peso, lo que parece lógico,
puesto que el peso de la máquina determina su momento de inercia, lo que induciría a
tomar esta clasificación como válida para estimar, a partir de ella, el momento de inercia
desconocido de una máquina. Sin embargo, el análisis por velocidad de sincronismo
permite obtener un grado de correlación superior a cualquiera de los tramos de peso en
los que se ha dividido la muestra.
2.8.13 Altura de eje.
En este caso la muestra está compuesta por máquinas clasificadas en cuatro
tramos según su altura de eje:
•
56
-
100 mm. Fig. (2.45) y (2.46).
•
101
-
200 mm. Fig. (2.47) y (2.48).
•
201
-
300 mm. Fig. (2.49) y (2.50).
•
301
-
450 mm. Fig. (2.51)
Se analizan los datos de cada familia, se hace el estudio de regresión lineal para
cada una de ellas y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la tabla (2.7).
49
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
56 - 100 mm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²) Muestra: 517 máquinas
Fig. 2.45. Momento de inercia en función de M·h2 para máquinas con altura de eje comprendida entre 56 y
100 mm.
56 - 100 mm
0,025
J(kg.m²)
0,02
Real
Estimado
0,015
0,01
0,005
0
0
0,1
0,2
0,3
0,4
0,5
M·h²(kg.m²) Muestra: 517 máquinas
Fig. 2.46. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con altura de
eje comprendida entre 56 y 100 mm.
50
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
101 - 200 mm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²) Muestra: 916 máquinas
Fig. 2.47. Momento de inercia en función de M·h2 para máquinas con altura de eje comprendida entre 101 y
200 mm.
101 - 200 mm
1
J(kg.m²)
0,8
Real
Estimado
0,6
0,4
0,2
0
0
5
10
15
20
M·h²(kg.m²) Muestra: 916 máquinas
Fig. 2.48. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con altura de
eje comprendida entre 101 y 200 mm
51
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
201 - 300 mm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
Muestra
:
551
máquinas
M·h²(kg.m²)
Fig. 2.49. Momento de inercia en función de M·h2 para máquinas con altura de eje comprendida entre 201 y
300 mm.
201 - 300 mm
12
J(kg.m²)
10
8
Real
Estimado
6
4
2
0
-10
40
90
140
190
240
M·h²(kg.m²)
Fig. 2.50. Detalle a escala reducida del momento de inercia en función de M·h2 para máquinas con altura de
eje comprendida entre 201 y 300 mm.
52
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
301 - 450 mm
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 640 máquinas
Fig. 2.51. Momento de inercia en función de M·h2 para máquinas con altura de eje comprendida entre 301 y
450 mm.
50
56 ‐ 100 mm
101 ‐ 200 mm
40
J(kg.m²)
201 ‐ 300 mm
301 ‐ 450 mm
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.52. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su altura de
eje.
53
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Tabla 2.7. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su altura de eje.
Altura de eje
n
r2
r
a
b
56 – 100 mm
517
0.8271
0.6841
0.0261
-0.0001
101 – 200 mm
916
0.8627
0.7444
0.0283
0.0029
201 – 300 mm
551
0.8623
0.7436
0.0578
-0.6024
301 – 450 mm
640
0.8798
0.7741
0.0377
-0.1009
Viendo los datos obtenidos, en principio se aprecia que a mayor altura de eje de la
máquina, también le corresponde una pendiente mayor de la recta correspondiente a
cada tramo de altura de eje, pero esto ya no se cumple en el tramo de 301 a 450 mm.
Por otra parte los coeficientes de determinación, aunque pueden indicar una calidad de
ajuste del método aceptable, no son tan buenos como los que se obtienen para otras
clasificaciones, por lo que en este caso tampoco se puede establecer esta clasificación
como la más aceptable para su utilización en el método de estimación del momento de
inercia.
2.8.14 Clase de eficiencia
En esta agrupación se van a establecer dos clasificaciones diferentes. Por una
parte se agrupan las máquinas según la clase de eficiencia declarada por los fabricantes
en sus catálogos y por otra se agrupan las máquinas según la clase de eficiencia real
calculada con arreglo a las exigencias de los límites nominales para las distintas clases
que establece la Norma IEC 60034:30/2008. En ambos casos se establece otra
agrupación formada por máquinas que por sus características en cuanto a potencia y
número de polos no entra dentro del campo de aplicación de dicha Norma.
La primera clasificación está formada por las máquinas catalogadas por el
fabricante según su nivel de eficiencia en cuatro clases y una quinta clasificación
formada por máquinas que, por sus características, no están sujetas a dicha Norma:
Clase IE1:
590 máquinas. Fig. (2.53).
Clase IE2:
1127 máquinas. Fig. (2.54).
Clase IE3:
376 máquinas. Fig. (2.55).
Clase IE4:
57 máquinas. Fig. (2.56).
Sin clasificar:
471 máquinas. Fig. (2.57).
Se analizan los datos de cada familia, se hace el estudio de regresión lineal para
cada una de ellas y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la tabla (2.8).
54
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
IE1
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M.h²(kg.m²) Muestra: 590 máquinas
Fig. 2.53. Momento de inercia en función de M·h2 para máquinas con clase de eficiencia catalogada por el
fabricante como IE1.
IE2
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M.h²(kg.m²) Muestra: 1127 máquinas
Fig. 2.54. Momento de inercia en función de M·h2 para máquinas con clase de eficiencia catalogada por el
fabricante como IE2.
55
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
IE3
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M.h²(kg.m²) Muestra: 376 máquinas
Fig. 2.55. Momento de inercia en función de M·h2 para máquinas con clase de eficiencia catalogada por el
fabricante como IE3.
IE4
50
40
Real
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
800
1000
M.h²(kg.m²)Muestra: 57 máquinas
Fig. 2.56. Momento de inercia en función de M·h2 para máquinas con clase de eficiencia catalogada por el
fabricante como IE4.
56
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Sin clasif.
50
J(kg.m²)
40
Real
Estimado
30
20
10
0
0
200
400
600
800
1000
M.h²(kg.m²) Muestra: 474 máquinas
Fig. 2.57. Momento de inercia en función de M·h2 para máquinas sin clasificación de eficiencia catalogada
por el fabricante.
50
IE1
J(kg.m²)
40
IE2
IE3
30
IE4
S/Clas.
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.58. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su clase de
eficiencia.
57
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Tabla 2.8. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su clasificación de eficiencia
tipo IE catalogada por el fabricante.
Clase eficiencia
n
r
r²
a
b
IE1
590
0.9525
0.9074
0.0392
-0.1799
IE2
1127
0.9284
0.8621
0.0349
0.0321
IE3
376
0.8912
0.7943
0.0462
-0.1998
IE4
57
0.8958
0.8026
0.0506
-0.1288
S/Clas.
474
0.9450
0.8932
0.0375
0.0792
Mediante el análisis de estos datos no se puede sacar ninguna conclusión
favorable en este tipo de agrupación, por lo que no se puede establecer que la clase de
eficiencia influya de manera determinante en el momento de inercia.
La segunda clasificación la forman máquinas con la eficiencia calculada
cumpliendo los requisitos de la Norma IEC 60034:30/2008 en tres clases y una cuarta
que no está sujeta a dicha Norma.
Clase IE1:
566 máquinas. Fig. (2.59).
Clase IE2:
912 máquinas. Fig. (2.60).
Clase IE3:
600 máquinas. Fig. (2.61).
Sin clasificar:
546 máquinas. Fig. (2.62).
Se analizan los datos de cada familia, se hace el estudio de regresión lineal para
cada una de ellas y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la tabla (2.9).
58
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
IE1
50
J(kg.m²)
40
IE1
Estimado
30
20
10
0
0
200
400
M·h²(kg.m²)
600
800
1000
Muestra: 566 máquinas
Fig. 2.59. Momento de inercia en función de M·h2 para máquinas con eficiencia calculada según Norma IEC
60034:30/2008 tipo IE1.
IE2
50
IE2
J(kg.m²)
40
Estimado
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²) Muestra:912 máquinas
Fig. 2.60. Momento de inercia en función de M·h2 para máquinas con eficiencia calculada según Norma IEC
60034:30/2008 tipo IE2.
59
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
IE3
50
IE3
40
J(kg.m²
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 600 máquinas
Fig. 2.61. Momento de inercia en función de M·h2 para máquinas con eficiencia calculada según Norma IEC
60034:30/2008 tipo IE3.
Sin clas.
50
J(kg.m²)
40
Sin clas.
Estimado
30
20
10
0
0
200
400
M·h²(kg.m²)
600
800
1000
Muestra: 546 máquinas
Fig. 2.62. Momento de inercia en función de M·h2 para máquinas sin clase de eficiencia.
60
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
50
IE1
IE2
J(kg.m²)
40
IE3
30
S/Clas.
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 2.63. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su clase de
eficiencia calculada según exigencias de la Norma IEC 60034:30/2008.
Tabla 2.9. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a) y
ordenada en origen (b) para la estimación del momento de inercia en máquinas según su clasificación de eficiencia
tipo IE, calculada según exigencias de la Norma IEC 60034:30/2008.
Clase Efic.
n
r
r²
a
b
IE1
566
0.9433
0.8900
0.0368
-0.1095
IE2
912
0.9189
0.8444
0.0377
-0.0804
IE3
600
0.9215
0.8492
0.0344
0.0220
S/Clas.
546
0.9692
0.9395
0.0472
0.2208
Con esta agrupación se obtienen unos resultados más favorables que en la
anterior, pero tampoco se puede determinar que la clase de eficiencia calculada según la
Norma IEC 60034:30/2008 influya en el momento de inercia de la máquina.
2.8.15 Agrupación de la muestra por velocidad de sincronismo y peso
Vistas todas las agrupaciones de máquinas y una vez analizados los datos
numéricos y las gráficas correspondientes, se ha visto que, de todas las clasificaciones,
en la agrupación a partir de la velocidad de sincronismo se obtienen los mejores
coeficientes de determinación (que indica el grado de ajuste de la recta de regresión a
los valores de la muestra) y correlación lineal (que indica el grado de relación entre las
variables J y M·h²).
61
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Por otra parte, en la agrupación de máquinas clasificadas por peso, se ha
observado con mucha claridad que la pendiente (a) de las rectas según cada tramo de
peso, sigue una tendencia progresiva en la que a mayor tramo de peso, también la
pendiente va aumentando proporcionalmente, es decir, según aumenta el peso de la
máquina, también lo hace el momento de inercia.
Aunque como ya se ha comentado, los coeficientes de determinación y
correlación obtenidos cuando se agrupa la muestra por velocidad de sincronismo son
muy elevados, se ha comprobado que al estimar el momento de inercia de las todas las
máquinas que componen la muestra, los errores relativos que se observan en las
máquinas cercanas al origen de coordenadas son muy elevados. Este hecho no se
aprecia en las figuras puesto que, con la escala en que están representados, parece que
los puntos están muy cercanos a la recta estimada, sin embargo como ya se ha
comentado el error relativo es a veces muy elevado.
Este hecho ha inducido que se proponga una nueva clasificación que agrupe a la
muestra no únicamente por la velocidad de sincronismo, sino también por su peso. De
este modo se han conseguido momentos de inercia estimados con un error relativo
mucho menor.
La muestra queda estructurada de la siguiente forma:
•
50 Hz
o 0 - 50 kg
3000 rpm:
177 máquinas. Fig. (2.64)
1500 rpm:
184 máquinas. Fig. (2.65)
1000 rpm:
123 máquinas. Fig. (2.66)
750 rpm:
88 máquinas. Fig. (2.67)
o 51 - 200 kg
3000 rpm:
143 máquinas. Fig. (2.68)
1500 rpm:
127 máquinas. Fig. (2.69)
1000 rpm:
105 máquinas. Fig. (2.70)
750 rpm:
56 máquinas. Fig. (2.71)
o 201 - 1000 kg
3000 rpm:
152 máquinas. Fig. (2.72)
1500 rpm:
168 máquinas. Fig. (2.73)
1000 rpm:
132 máquinas. Fig. (2.74)
750 rpm:
73 máquinas. Fig. (2.75)
62
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
o 1001 - 5000 kg
•
3000 rpm:
100 máquinas. Fig. (2.76)
1500 rpm:
110 máquinas. Fig. (2.77)
1000 rpm:
106 máquinas. Fig. (2.78)
750 rpm:
59 máquinas. Fig. (2.79)
60 Hz
o 0 - 50 kg
3600 rpm:
59 máquinas. Fig. (2.80)
1200 rpm:
52 máquinas. Fig. (2.81)
1200 rpm:
32 máquinas. Fig. (2.82)
900 rpm:
23 máquinas. Fig. (2.83)
o 51 - 200 kg
3600 rpm:
47 máquinas. Fig. (2.84)
1200 rpm:
46 máquinas. Fig. (2.85)
1200 rpm:
29 máquinas. Fig. (2.86)
900 rpm:
25 máquinas. Fig. (2.87)
o 201 - 1000 kg
3600 rpm:
72 máquinas. Fig. (2.88)
1200 rpm:
72 máquinas. Fig. (2.89)
1200 rpm:
53 máquinas. Fig. (2.90)
900 rpm:
44 máquinas. Fig. (2.91)
o 1001 - 5000 kg
3600 rpm:
32 máquinas. Fig. (2.92)
1200 rpm:
47 máquinas. Fig. (2.93)
1200 rpm:
46 máquinas. Fig. (2.94)
900 rpm:
27 máquinas. Fig. (2.95)
En esta agrupación se han adaptado los valores máximos de las escalas de los ejes
de coordenadas a los valores máximos del momento de inercia para cada tramo de pesovelocidad de sincronismo con la finalidad de poder observar con mejor detalle la
distribución de los datos.
Se analizan los datos de cada tramo, se hace el estudio de regresión lineal para
cada uno de ellos y se obtienen los coeficientes r y r² y los parámetros de la recta a y b,
que se muestran en la Tabla (2.10).
63
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
0-50 kg - 3000 rpm
J(kg.m²)
0,06
0,05
Real
0,04
Estimado
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
0,8
1
1,2
Muestra: 177 máquinas
Fig. 2.64. Momento de inercia en función de M·h2 para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 3000 rpm
0-50 kg - 1500 rpm
J(kg.m²)
0,06
0,05
Real
0,04
Estimado
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
2
0,8
1
1,2
Muestra: 184 máquinas
Fig. 2.65. Momento de inercia en función de M·h para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 1500 rpm
64
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
0-50 kg - 1000 rpm
J(kg.m²)
0,06
0,05
Real
0,04
Estimado
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
0,8
1
1,2
Muestra: 136 máquinas
Fig. 2.66. Momento de inercia en función de M·h2 para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 1000 rpm
0-50kg - 750 rpm
J(kg.m²)
0,06
0,05
Real
0,04
Estimado
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
2
0,8
1
1,2
Muestra: 88 máquinas
Fig. 2.67. Momento de inercia en función de M·h para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 750 rpm
65
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
51-200 kg - 3000 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 143 máquinas
Fig. 2.68. Momento de inercia en función de M·h2 para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 3000 rpm
51-200 kg - 1500 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 127 máquinas
Fig. 2.69. Momento de inercia en función de M·h2 para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 1500 rpm
66
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
51-200 kg - 1000 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 105 máquinas
Fig. 2.70. Momento de inercia en función de M·h2 para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 1000 rpm
51-200 kg - 750 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 56 máquinas
Fig. 2.71. Momento de inercia en función de M·h2 para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 750 rpm
67
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
201-1000 kg - 3000 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
80
100
120
Muestra: 152 máquinas
Fig. 2.72. Momento de inercia en función de M·h2 para máquinas con peso entre 201 y 1500 kg y con
velocidad de sincronismo 3000 rpm
201-1000 kg - 1500 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
2
80
100
120
Muestra: 168 máquinas
Fig. 2.73. Momento de inercia en función de M·h para máquinas con peso entre 201 y 1000 kg y con
velocidad de sincronismo 1500 rpm
68
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
201-1000 kg - 1000 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
80
100
120
Muestra: 132 máquinas
Fig. 2.74. Momento de inercia en función de M·h2 para máquinas con peso entre 201 y 1000 kg y con
velocidad de sincronismo 1000 rpm
201-1000 kg - 750 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
2
80
100
120
Muestra: 73 máquinas
Fig. 2.75. Momento de inercia en función de M·h para máquinas con peso entre 201 y 1000 kg y con
velocidad de sincronismo 750 rpm
69
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1001-5000 kg - 3000 rpm
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 100 máquinas
Fig. 2.76. Momento de inercia en función de M·h2 para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 3000 rpm
1001-5000 kg - 1500 rpm
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 110 máquinas
Fig. 2.77. Momento de inercia en función de M·h2 para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 1500 rpm
70
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1001-5000 kg - 1000rpm
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 106 máquinas
Fig. 2.78. Momento de inercia en función de M·h2 para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 1000 rpm
1001-5000 750
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
2
800
1000
Muestra: 59 máquinas
Fig. 2.79. Momento de inercia en función de M·h para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 750 rpm
71
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
0 - 50 kg - 3600 rpm
J(kg.m²)
0,06
0,05
Real
0,04
Estimado
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
0,8
1
1,2
Muestra: 59 máquinas
2
Fig. 2.80. Momento de inercia en función de M·h para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 3600 rpm
0 - 50 kg - 1800 rpm
0,06
Real
0,04
Estimado
J(kg.m²)
0,05
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
0,8
1
1,2
Muestra: 52 máquinas
Fig. 2.81. Momento de inercia en función de M·h2 para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 1800 rpm
72
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
0 - 50 kg 1200 rpm
0,06
0-50 1200
0,04
Estimado
J(kg.m²)
0,05
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
0,8
1
1,2
Muestra: 32 máquinas
2
Fig. 2.82. Momento de inercia en función de M·h para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 1200 rpm
0 - 50 kg - 900 rpm
0,06
Real
0,05
Estimado
J(kg.m²)
0,04
0,03
0,02
0,01
0
0
0,2
0,4
0,6
M·h²(kg.m²)
0,8
1
1,2
Muestra: 23 máquinas
Fig. 2.83. Momento de inercia en función de M·h2 para máquinas con peso entre 0 y 50 kg y con velocidad de
sincronismo 900 rpm
73
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
51 - 200 kg - 3600 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 47 máquinas
2
Fig. 2.84. Momento de inercia en función de M·h para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 3600 rpm
51 - 200 kg - 1800 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 46 máquinas
Fig. 2.85. Momento de inercia en función de M·h2 para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 1800 rpm
74
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
51 - 200 kg - 1200 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 29 máquinas
Fig. 2.86. Momento de inercia en función de M·h2 para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 1200 rpm
51 - 200 kg - 900 rpm
J(kg.m²)
0,6
0,5
Real
0,4
Estimado
0,3
0,2
0,1
0
0
2
4
6
M·h²(kg.m²)
8
10
12
Muestra: 25 máquinas
Fig. 2.87. Momento de inercia en función de M·h2 para máquinas con peso entre 51 y 200 kg y con velocidad
de sincronismo 900 rpm
75
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
201 - 1000 kg - 3600 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
80
100
120
Muestra: 72 máquinas
2
Fig. 2.88. Momento de inercia en función de M·h para máquinas con peso entre 201 y 1000 kg y con
velocidad de sincronismo 3600 rpm
201 - 1000 kg - 1800 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
80
100
120
Muestra: 72 máquinas
Fig. 2.89. Momento de inercia en función de M·h2 para máquinas con peso entre 201 y 1000 kg y con
velocidad de sincronismo 1800 rpm
76
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
201 - 1000 - 1200 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
80
100
120
Muestra: 53 máquinas
Fig. 2.90. Momento de inercia en función de M·h2 para máquinas con peso entre 201 y 1000 kg y con
velocidad de sincronismo 1200 rpm
201 - 1000 kg - 900 rpm
J(kg.m²)
6
5
Real
4
Estimado
3
2
1
0
0
20
40
60
M·h²(kg.m²)
80
100
120
Muestra: 44 máquinas
Fig. 2.91. Momento de inercia en función de M·h2 para máquinas con peso entre 201 y 1000 kg y con
velocidad de sincronismo 900 rpm
77
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1001 - 5000 kg - 3600 rpm
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 32 máquinas
2
Fig. 2.92. Momento de inercia en función de M·h para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 3600 rpm
1001 - 5000 kg - 1800 rpm
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 47 máquinas
Fig. 2.93. Momento de inercia en función de M·h2 para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 1800 rpm
78
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
1001 - 5000 kg - 1200 rpm
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 46 máquinas
2
Fig. 2.94. Momento de inercia en función de M·h para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 1200 rpm
1001 - 5000 kg - 900 rpm
50
Real
40
J(kg.m²)
Estimado
30
20
10
0
0
200
400
600
M·h²(kg.m²)
800
1000
Muestra: 27 máquinas
Fig. 2.95. Momento de inercia en función de M·h2 para máquinas con peso entre 1001 y 5000 kg y con
velocidad de sincronismo 900 rpm Tabla
79
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
2.10. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y ordenada
en origen (b) para la estimación del momento de inercia en máquinas según su peso y velocidad de sincronismo (ns)
Frecuenc.
Peso
ns
n
r
r2
a
b
50 Hz
0 – 50 kg
3000
177
0,9561
0,9141
0,0194
-0,0006
1500
184
0,9606
0,9228
0,0287
-0,0002
1000
136
0,9543
0,9107
0,0313
0,0001
750
88
0,9613
0,9241
0,0300
0,0002
3000
143
0,9482
0,8991
0,0151
0,0059
1500
127
0,9493
0,9012
0,0264
0,0021
1000
105
0,9628
0,9269
0,0361
-0,0047
750
56
0,9604
0,9224
0,0411
-0,0194
3000
152
0,9581
0,9179
0,0184
-0,0227
1500
168
0,9715
0,9438
0,0315
-0,0522
1000
132
0,9628
0,9270
0,0435
-0,0498
750
73
0,9523
0,9068
0,0427
-0,0371
3000
100
0,9729
0,9466
0,0227
-0,8053
1500
110
0,9868
0,9737
0,0302
0,3917
1000
106
0,9716
0,9441
0,0444
0,6926
750
59
0,9552
0,9124
0,0408
2,1319
3600
59
0,9827
0,9657
0,0152
-0,0003
1800
52
0,9669
0,9348
0,0274
0,0001
1200
32
0,9924
0,9848
0,0492
-0,0013
900
23
0,9704
0,9416
0,0325
0,0002
3600
47
0,9772
0,9549
0,0223
-0,0063
1800
46
0,9742
0,9490
0,0378
0,0016
1200
29
0,9826
0,9656
0,0646
-0,0315
900
25
0,9884
0,9770
0,0568
-0,0054
3600
72
0,9585
0,9188
0,0241
-0,0619
1800
72
0,9292
0,8635
0,0395
-0,0242
1200
53
0,9678
0,9367
0,0642
-0,1951
900
44
0,9515
0,9054
0,0586
-0,0729
3600
32
0,9173
0,8414
0,0229
0,3982
1800
47
0,8846
0,7825
0,0333
1,0080
1200
46
0,9462
0,8952
0,0478
1,7439
900
27
0,9719
0,9445
0,0758
-0,8210
51-200 kg
201-1000 kg
1001-5000kg
60 Hz
0 – 50 kg
51-200 kg
201-1000 kg
1001-5000 kg
80
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Examinando los resultados de la Tabla 2.10, se aprecian unos coeficientes de
determinación con valores muy aceptables superando la gran mayoría de las veces el
valor de 0.9, lo que indica un buen grado de ajuste de las rectas de regresión a los
valores de las variables. También se aprecia dentro de cada tramo de peso que la
pendiente de la recta suele seguir una tendencia inversamente proporcional a la
velocidad de sincronismo y directamente proporcional al peso, lo que viene a significar
que el momento de inercia es menor a mayor velocidad de sincronismo y mayor a
mayor peso de la máquina y viceversa. Estas apreciaciones indican que, posiblemente,
este tipo de agrupación sea la más adecuada de todas las descritas en este proyecto para
utilizar en el método de estimación del momento de inercia, puesto que parece indicar
que sería el más preciso de todos.
2.8.16 Comprobación de resultados
Para corroborar las suposiciones hechas en el apartado anterior y determinar cuál
sería entonces la agrupación con el mejor ajuste entre J y M·h² se calcula en la hoja de
datos el momento de inercia estimado con este método, tanto para la muestra en general
como para las agrupaciones por velocidad de sincronismo y por velocidad de
sincronismo-peso y se comparan los resultados con el momento de inercia real
declarado en el catálogo por el fabricante, obteniendo también el error relativo para cada
máquina.
Las desviaciones de los errores con respecto a la línea de tendencia pueden ser
valores positivos o negativos, según estén gráficamente por encima o por debajo de
dicha línea. Para determinar el promedio de las desviaciones se elevan al cuadrado las
desviaciones absolutas y se comparan los resultados para cada agrupación.
El resultado obtenido arroja los mejores valores de la estimación del momento de
inercia, para la agrupación de las máquinas por velocidad de sincronismo-peso, con un
porcentaje de error promedio del ± 10.98%, confirmando las suposiciones hechas en el
apartado anterior.
Se propone, por tanto, la utilización de los parámetros a y b de la Tabla (2.10)
como los más adecuados para su utilización en la estimación del momento de inercia de
una máquina de inducción trifásica con rotor en jaula de ardilla, conociendo solamente
los datos de su peso y altura de eje, a través de la fórmula:
J = a ⋅ (M ⋅ h 2 ) + b
2.9
(2.11)
PLANIFICACIÓN
No es de aplicación en este proyecto.
2.10 ORDEN DE PRIORIDAD ENTRE LOS DOCUMENTOS BÁSICOS
En caso de errores o frente a posibles discrepancias entre los diferentes
documentos del proyecto, el orden de prioridad de los documentos básicos será el
siguiente:
81
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Índice
•
Memoria
•
Anexos
82
Método para la estimación del momento de inercia de
máquinas de inducción trifásicas a partir de su peso y
altura de eje
TITULACIÓN: Ingeniería Técnica Industrial en Electricidad
3
ANEXOS
AUTOR: Manuel Cereijo Neira
DIRECTOR: Luis Guasch Pesquer
FECHA: Septiembre/2011.
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
ÍNDICE ANEXOS
3.0
ANEXOS.………………………………………………………………83
3.1 DOCUMENTACIÓN DE PARTIDA ...................................................85 3.1.1 Recogida de datos ............................................................................. 85 3.1.2 Criterios de selección ........................................................................ 85 3.2 CÁLCULOS ..........................................................................................87 3.2.1 Procesado de la información ............................................................. 87 3.2.2 Criterios y procedimiento de cálculo ................................................ 90 3.2.3 Obtención de resultados .................................................................... 93 3.2.4 Comparación de resultados ............................................................. 104
84
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
3.1
DOCUMENTACIÓN DE PARTIDA
3.1.1 Recogida de datos
La mayor parte de los datos de partida para la realización del proyecto se han
obtenido de los catálogos de los propios fabricantes de las máquinas analizadas, que de
forma pública los facilitan, bien a través de un contacto directo o a través de sus propios
portales de Internet, de donde se han descargado. El único tratamiento que se ha
realizado sobre ellos ha sido sobre las máquinas del fabricante WEG, donde se han
convertido los datos de la altura de eje, par nominal, momento de inercia y peso, del
Sistema Anglosajón de Unidades al Sistema Internacional de Unidades. La fiabilidad de
los datos recogidos depende de los propios fabricantes que los han facilitado.
Al analizar una amplia muestra de máquinas (2624), también se ha pretendido que
los datos recogidos estuvieran diversificados en un número amplio de fabricantes con el
fin de que hubiera una importante representación por parte de éstos. Se han recogido
datos de fabricantes europeos, americanos y australianos y son los que se detallan a
continuación.
•
ABB
http://www.abb.com
•
CMG
http://www.cmggroup.com.au
•
LEROY SOMER
http://www.leroy-somer.com
•
MARELLI
http://www.marellimotori.com
•
ROSSI
http://www.rossi-group.com
•
SIEMENS
http://www.siemens.com
•
VEM
http://www.vem-group.com
•
WEG
http://www.weg.net
3.1.2 Criterios de selección
Los fabricantes incluyen dentro de sus catálogos una gran cantidad de datos
referidos a los tipos de máquinas y a sus características eléctricas, mecánicas,
constructivas, etc. Es necesario por tanto establecer unos criterios para seleccionar
aquellos datos que pueden resultar útiles o importantes para llevar a cabo el objetivo del
presente proyecto. En primer lugar se seleccionan las máquinas que se estudian para
este método, que son las de inducción trifásicas con rotor en jaula de ardilla y de éstas
se recopilan los datos que se consideran necesarios para la obtención del método de
estimación del momento de inercia y también otros, que aunque no son imprescindibles,
pueden resultar adecuados para comprender mejor el comportamiento de las mismas
con respecto a su momento de inercia. Dentro de éstos datos se establecen
principalmente dos límites de selección:
85
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Potencia. Se seleccionan las máquinas con potencias comprendidas entre
0 y 1000 kW. En este tramo se encuentran la gran mayoría de las
máquinas para los distintos usos generales y sobre todo en los procesos
industriales, pues es en este sector donde tiene su mayor aplicación. Las
máquinas con potencias superiores a este límite, aparte de tener una cuota
de mercado muy pequeña, suelen tener usos específicos con características
propias de diseño y dimensionado y por tanto, desvirtuar los resultados
obtenidos para la muestra de uso general.
•
Nº de polos. Se seleccionan las máquinas hasta 8 polos. No se estudian las
máquinas de 10 o más polos, sobre todo porque suponen una cuota de
mercado prácticamente despreciable, incluso la cuota de utilización de
máquinas con 8 polos es ya muy baja (del 1% o menos).
Se determinan los datos de los catálogos que se van a seleccionar para cada una de
las máquinas de la muestra, y que se van a incorporar a la base de datos, resultando ser
los que se relacionan a continuación:
•
Fabricante
•
Código de máquina
•
Potencia
•
Altura de eje
•
Peso
•
Momento de inercia
•
Nº de polos
•
Velocidad nominal
•
Frecuencia
•
Voltaje
•
Tipo de carcasa
•
Factor de potencia
•
Intensidad nominal
•
Intensidad de arranque
•
Par nominal
•
Par de arranque
•
Par máximo
•
Rendimiento
•
Clase de eficiencia
•
Nivel de presión sonora
•
Tipo de motor
86
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
3.2
•
Tipo de rotor
•
Año de catálogo
CÁLCULOS
Una vez seleccionados y obtenidos todos los datos de partida relacionados en el
apartado anterior, se procede a su introducción en una hoja de cálculo para el
tratamiento y procesado de la información, obteniendo una matriz inicial de 2624 filas
(máquinas) por 23 columnas (características), es decir, 60372 celdas de datos, que
después será ampliada a 94464 al incorporar datos calculados, necesarios para el
desarrollo y obtención del trabajo realizado.
3.2.1 Procesado de la información
El primer paso importante en el tratamiento de los datos es crear una nueva
columna en la tabla y obtener para cada máquina la relación M·h² (kg·m²), a partir de
los datos de su peso y altura de eje correspondientes.
También se calcula para cada máquina su velocidad de sincronismo. Se intuye que
este dato puede tener su importancia porque el momento de inercia es una característica
propia de un cuerpo, referido a su eje de giro, y en este caso se supone inicialmente que
dicho momento de inercia es menor cuanto mayor sea su velocidad de rotación y
viceversa.
Para calcular la velocidad de sincronismo (ns) se parte de la siguiente fórmula:
ns =
60 f
p
(3.1)
Donde:
ns
velocidad de sincronismo
f
frecuencia
p nº de pares de polos
Tanto la frecuencia como el nº de pares de polos son datos que, como se ha
detallado en el capítulo (3.2), son facilitados por los fabricantes en sus catálogos.
Se ha querido también comprobar si la clase de eficiencia de cada máquina,
declarada por el fabricante, se correspondía exactamente con la que determina la Norma
que la regula. Estos cálculos son posibles puesto que se dispone de los datos necesarios
para ello.
La clase de eficiencia de una máquina está establecida por la Comisión
Electrotécnica Internacional (IEC). Se trata de una organización mundial con el
objetivo de promover la cooperación internacional sobre todas las cuestiones relativas a
87
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
la normalización en los campos eléctrico y electrónico. La clase de eficiencia se
desarrolla en la Norma IEC 60034:30/2008 en la que se establecen los requisitos
exigidos en cuanto a rendimiento de una máquina de inducción trifásica con rotor en
jaula de ardilla.
Las clases de eficiencia IE1, IE2 e IE3 relacionadas en la Norma están referidas a
unos límites de rendimiento porcentual, teniendo en cuenta las características de la
máquina en cuanto a su frecuencia, potencia y nº de polos y están establecidas en las
siguientes Tablas 3.1 y 3.2.
Tabla 3.1. Límites nominales (%) para rendimientos IE1, IE2 e IE3 para máquinas a 50 Hz.
50 Hz
IE1
kW
0.75
1.10
1.50
2.20
3.00
4.00
5.50
7.50
11.00
15.00
18.50
22.00
30.00
37.00
45.00
55.00
75.00
90.00
110.00
132.00
160.00
De
200.00
a 375.00
IE2
IE3
2
polos
72.10
75.00
77.20
79.70
81.50
83.10
84.70
86.00
87.60
88.70
89.30
89.90
90.70
91.20
91.70
92.10
92.70
93.00
93.30
93.50
93.80
4
polos
72.10
75.00
77.20
79.70
81.50
83.10
84.70
86.00
87.60
88.70
89.30
89.90
90.70
91.20
91.70
92.10
92.70
93.00
93.30
93.50
93.80
6
polos
70.00
72.90
75.20
77.70
79.70
81.40
83.10
84.70
86.40
87.70
88.60
89.20
90.20
90.80
91.40
91.90
92.60
92.90
93.30
93.50
93.80
2
polos
77.40
79.60
81.30
83.20
84.60
85.80
87.00
88.10
89.40
90.30
90.90
91.30
92.00
92.50
92.90
93.20
93.80
94.10
94.30
94.60
94.80
4
polos
79.60
81.40
82.80
84.30
85.50
86.60
87.70
88.70
89.80
90.60
91.20
91.60
92.30
92.70
93.10
93.50
94.00
94.20
94.50
94.70
94.90
6
polos
75.90
78.10
79.80
81.80
83.30
84.60
86.00
87.20
88.70
89.70
90.40
90.90
91.70
92.20
92.70
93.10
93.70
94.00
94.30
94.60
94.80
2
polos
80.70
82.70
84.20
85.90
87.10
88.10
89.20
90.10
91.20
91.90
92.40
92.70
93.30
93.70
94.00
94.30
94.70
95.00
95.20
95.40
95.60
4
polos
82.50
84.10
85.30
86.70
87.70
88.60
89.60
90.40
91.40
92.10
92.60
93.00
93.60
93.90
94.20
94.60
95.00
95.20
95.40
95.60
95.80
6
polos
78.90
81.00
82.50
84.30
85.60
86.80
88.00
89.10
90.30
91.20
91.70
92.20
92.90
93.30
93.70
94.10
94.60
94.90
95.10
95.40
95.60
94.00
94.00
94.00
95.00
95.10
95.00
95.80
96.00
95.80
88
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Tabla 3.2. Límites nominales (%) para rendimientos IE1, IE2 e IE3 para máquinas a 60 Hz.
60 Hz
IE1
kW
0.75
1.10
1.50
2.20
3.70
5.50
7.50
11.00
15.00
18.50
22.00
30.00
37.00
45.00
55.00
75.00
90.00
110.00
150.00
De
185.00
a
375.00.
IE2
IE3
2
polos
77.00
78.50
81.00
81.50
84.50
86.00
87.50
87.50
88.50
89.50
89.50
90.20
91.50
91.70
92.40
93.00
93.00
93.00
94.10
4
polos
78.00
79.00
81.50
83.00
85.00
87.00
87.50
88.50
89.50
90.50
91.00
91.70
92.40
93.00
93.00
93.20
93.20
93.50
94.50
6
polos
73.00
75.00
77.00
78.50
83.50
85.00
86.00
89.00
89.50
90.20
91.00
91.70
91.70
91.70
92.10
93.00
93.00
94.10
94.10
2
polos
75.50
82.50
84.00
85.50
87.50
88.50
89.50
90.20
90.20
91.00
91.00
91.70
92.40
93.00
93.00
93.60
94.50
94.50
95.00
4
polos
82.50
84.00
84.00
87.50
87.50
89.50
89.50
91.00
91.00
92.40
92.40
93.00
93.00
93.60
94.10
94.50
94.50
95.00
95.00
6
polos
80.00
85.50
86.50
87.50
87.50
89.50
89.50
90.20
90.20
91.70
91.70
93.00
93.00
93.60
93.60
94.10
94.10
95.00
95.00
2
polos
77.00
84.00
85.50
86.50
88.50
89.50
90.20
91.00
91.00
91.70
91.70
92.40
93.00
93.60
93.60
94.10
95.00
95.00
95.40
4
polos
85.50
86.50
86.50
89.50
89.50
91.70
91.70
92.40
93.00
93.60
93.60
94.10
94.50
95.00
95.40
95.40
95.40
95.80
96.20
6
polos
82.50
87.50
88.50
89.50
89.50
91.00
91.00
91.70
91.70
93.00
93.00
94.10
94.10
94.50
94.50
95.00
95.00
95.80
95.80
94.10
94.50
94.10
95.40
95.40
95.00
95.80
96.20
95.80
El proceso se realiza partiendo de unas condiciones ordenadas en unas fórmulas
creadas en la hoja de cálculo en las que se hacen comparaciones de valores dentro de un
rango o matriz de datos y ver si se cumplen dichas condiciones para los valores
declarados por el fabricante comparados con los valores establecidos por la Norma IEC
60034:30/2008.
A modo de ejemplo se detallan las fórmulas de la 1ª fila de la matriz de datos
para cada límite de rendimiento establecido en las Tablas (3.1) y (3.2) que determinan
las tres clases de eficiencia:
89
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Rend.IE1=SI(F2<7;SI(H2=50;INDICE('IE150'!B$2:D$24;COINCIDIR(C2;'IE15
0'!A$2:A$24;1);Todos!F2/2);INDICE('IE160'!B$2:D$22;COINCIDIR(C2;'IE160'!A$2:
A$22;1);Todos!F2/2));"")
(3.2)
ClaseIE1=SI(J2<S2;"";1)
(3.3)
Rend.IE2=SI(F2<7;SI(H2=50;INDICE('IE250'!B$2:D$24;COINCIDIR(C2;'IE25
0'!A$2:A$24;1);Todos!F2/2);INDICE('IE260'!B$2:D$22;COINCIDIR(C2;'IE260'!A$2:
A$22;1);Todos!F2/2));"")
(3.4)
Clase IE2=SI(J2<T2;"";1)
(3.5)
Rend.IE3=SI(F2<7;SI(H2=50;INDICE('IE350'!B$2:D$24;COINCIDIR(C2;'IE35
0'!A$2:A$24;1);Todos!F2/2);INDICE('IE360'!B$2:D$22;COINCIDIR(C2;'IE360'!A$2:
A$22;1);Todos!F2/2));"")
(3.6)
Clase IE3=SI(J2<U2;"";1)
(3.7)
3.2.2 Criterios y procedimiento de cálculo
Como ya se ha determinado en la memoria del proyecto, existe una relación lineal
entre el momento de inercia de una máquina J (kg·m²) y el producto de su masa por la
altura del eje al cuadrado M·h² (kg·m²).
Éstas serán las dos variables que se utilicen en todo el proceso para obtener los
resultados, tanto a nivel general de la muestra como en las distintas agrupaciones de
máquinas que se van a establecer, para observar el comportamiento que pueda tener su
momento de inercia con respecto a dicha agrupación.
Para poder establecer la relación entre las dos citadas variables, se utilizan
métodos de cálculo de regresión lineal. La regresión lineal tiene una parte de
representación gráfica formada por la distribución espacial en forma de puntos de los
datos obtenidos, y la línea de tendencia que permite vislumbrar el grado de relación
entre ellos, y una parte de cálculo que hace posible estimar los parámetros de dicha
línea de tendencia y los coeficientes de determinación y correlación lineal que permiten
valorar el grado de relación entre dichas variables.
La ecuación de la recta de la línea de tendencia es de la forma:
y = ax + b
Donde:
y
J (variable dependiente)
x
M∙h² (variable independiente)
90
(3.8)
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
a
pendiente de la recta
b ordenada en el origen de la recta
Sustituyendo los valores de x e y para este caso, se obtiene la fórmula general para
el cálculo del momento de inercia conociendo solamente los datos del peso y altura de
eje:
J = a ⋅ ( M ⋅ h2 ) + b
(3.9)
Para el cálculo de la pendiente de la recta (a), también llamado coeficiente de
regresión se utiliza la siguiente expresión:
a=
n ∑ x ⋅ y − ( ∑ x )( ∑ y )
n∑ x2 − ( ∑ x )
2
( ∑ ( M ⋅ h )) ( ∑ J )
n∑ ( M ⋅ h ) − ( ∑ ( M ⋅ h ))
n ∑ ( M ⋅ h2 ) ⋅ ( J ) −
=
2
2 2
2
2
(3.10)
Para el cálculo de la ordenada en origen o intersección (b), se utiliza la siguiente
expresión:
∑ y − a ( ∑ x ) = ∑ J − a ( ∑ ( M ⋅ h ))
b=
2
n
n
(3.11)
Donde:
n
nº de relaciones entre x e y (nº de máquinas analizadas)
∑x⋅ y
∑y
suma de productos x·y (x1·y1 + x2·y2+.......+ xn·yn)
∑x
∑x
suma de valores x (x1 + x2 +…….+ xn)
2
suma de valores y (y1 + y2 +…….+ yn)
suma de valores x2 (x12
+
x22 +……xn2)
También se calcula para cada recta de regresión, el coeficiente de correlación
lineal, que es el indicativo que determina el grado de asociación entre las dos variables J
y M·h². Se obtiene mediante la siguiente expresión:
r=
σ xy
σ x ⋅σ y
91
(3.12)
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Donde:
r
Coeficiente de correlación lineal
σ xy
Covarianza de la muestra
σx
Desviación típica de x (M·h²)
σy
Desviación típica de y (J)
Que a su vez se obtienen mediante las siguientes expresiones:
σ xy = ∑
f i ⋅ xi ⋅ yi
n
− X ⋅Y
(3.13)
yi2
−Y 2
n
(3.14)
xi2
σy = ∑ − X2
i =1 n
(3.15)
σx =
n
∑
i =1
n
Donde:
X
media aritmética de los valores de x (M·h²)
Y
media aritmética de los valores de y (J)
Se hace el cálculo del coeficiente de determinación lineal, que es la medida más
importante para ver la calidad del ajuste de la recta de regresión a los valores de la
muestra mediante la expresión:
σ xy2
r = 2 2
σ x ⋅σ x
2
Donde:
r²
coeficiente de correlación lineal
92
(3.16)
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
3.2.3 Obtención de resultados
El primer paso después de establecer el procedimiento de cálculo para todo el
proceso, es considerar el comportamiento de J y M·h² cuando se hace la relación para
toda la muestra de máquinas analizadas. Los resultados obtenidos se presentan en las
siguientes tabla y gráfica correspondientes:
Tabla 3.3. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y
ordenada en origen (b) para la estimación del momento de inercia en la totalidad de la muestra de máquinas.
n
2624
r
r²
a
B
0.9361
0.8765
0.0375
0.0023
50
40
J (kg.m²)
Real
Estimado
30
20
10
0
0
200
400
600
M·h² (Kg.m²)
800
1000
Muestra: 2624 máquinas
Fig.3.1. Momento de inercia en función de M·h2 para toda la muestra de máquinas y recta de regresión
correspondiente.
Se obtienen unos coeficientes de correlación y determinación muy favorables que
indican una buena calidad del ajuste del método de estimación.
También se procede a establecer otras agrupaciones de máquinas según sus
características más relevantes con la finalidad de analizar el grado de relación que
puedan tener con respecto a su momento de inercia. Para ello, dentro de cada
agrupación, se dividen los datos en tramos significativos para poder comparar los
resultados.
Se hacen las relaciones y se muestran los resultados mediante tablas y gráficas, de
los cálculos obtenidos entre las dos variables para las siguientes agrupaciones de
máquinas:
93
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por velocidad de sincronismo
Tabla 3.4. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y
ordenada en origen (b) para la estimación del momento de inercia en máquinas según su velocidad de sincronismo.
Frecuencia
ns
50 Hz
60 Hz
r2
r
a
b
3000
572
0.9856
0.9715
0.0207
-0.0808
1500
588
0.9948
0.9898
0.0310
0.0121
1000
478
0.9887
0.9776
0.0459
0.0074
750
279
0.9835
0.9673
0.0446
0.1188
3600
211
0.9861
0.9724
0.0248
-0.0269
1800
215
0.9742
0.9492
0.0378
0.0551
1200
162
0.9846
0.9696
0.0549
0.1388
900
119
0.9918
0.9838
0.0728
-0.2960
50
750
900
1000
1200
1500
1800
3000
3600
40
J(kg.m²)
n
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 3.2. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su
velocidad de sincronismo.
Los datos obtenidos mejoran claramente los que se obtuvieron para la muestra
general sin agrupar. Se puede afirmar que la velocidad de sincronismo de la máquina
influye de una forma inversamente proporcional en su momento de inercia.
94
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por tipo de carcasa
Tabla 3.5. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y
ordenada en origen (b) para la estimación del momento de inercia en máquinas según el tipo de carcasa.
Tipo carcasa
n
r
r2
a
b
Acero
68
0.8757
0.7670
0.0350
0.1670
Aluminio
677
0.9366
0.8773
0.0347
-0.0104
Hierro
1879
0.9318
0.8683
0.0376
0.0103
50
Acero
40
J(kg.m²)
Aluminio
30
Hierro
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 3.3. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su tipo de
carcasa.
No se puede afirmar en este caso, a la vista de los datos, que el tipo de carcasa de
la máquina influya en el momento de inercia. Hay que tener en cuenta que el nº de
máquinas de cada muestra es muy heterogéneo (68, 677 y 1879 máquinas).
95
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por fabricante
Tabla 3.6. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según el fabricante.
Fabricante
n
r
r2
a
B
ABB
570
0.9550
0.9122
0.0352
-0.0359
CMG
47
0.9003
0.8107
0.0367
-0.1577
L. Somer
349
0.9411
0.8858
0.0404
-0.3247
Marelli
206
0.9227
0.8515
0.0396
-0.1005
Rossi
197
0.9646
0.9306
0.0313
0.0005
Siemens
450
0.9491
0.9009
0.0364
-0.0624
VEM
215
0.9267
0.8589
0.0323
-0.0527
WEG
589
0.9112
0.8303
0.0487
-0.0975
ABB
50
CMG
L.SOMER
40
ROSSI
SIEMENS
J(kg.m²)
30
VEM
20
WEG
MARELLI
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 3.4. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según el
fabricante que la produce.
Los datos obtenidos en la agrupación por fabricante indican que éste apenas
influye en el momento de inercia de la máquina que fabrica.
96
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por potencia
Tabla 3.7. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su potencia.
Potencia
n
r
r2
a
b
0 – 1 kW
265
0.9440
0.8913
0.0293
-0.0002
1.1 – 10 kW
710
0.9140
0.8355
0.0417
-0.0074
11 – 100 kW
967
0.9182
0.8341
0.0419
-0.1155
101 – 1000 kW
682
0.8781
0.7711
0.0372
0.1161
50
0-1 kW
1.1-10 kW
J(kg.m²)
40
11-100 kW
101-1000 kW
30
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 3.5. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su potencia.
Clasificar las máquinas por potencia no mejora el índice de correlación obtenido
para toda la muestra en su conjunto.
97
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por peso
Tabla 3.8. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su peso.
Peso
n
r2
r
a
B
0 – 50 kg
753
0.8949
0.8009
0.0275
-0.0003
51 – 200 kg
575
0.7872
0.6197
0.0317
-0.0049
201 – 1000kg
769
0.8264
0.6830
0.0349
-0.0199
1001 – 5000 kg
527
0.8515
0.7251
0.0363
0.5442
600
800
50
0 ‐ 50 kg
40
51 ‐ 200 kg
J(kg.m²)
201‐1000 kg
30
1001‐5000 kg
20
10
0
0
200
400
1000
M·h²(kg.m²)
Fig. 3.6. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su peso.
Los datos obtenidos reflejan un aumento progresivo de la pendiente (a), según va
aumentando el tramo de peso de la máquina, por lo que se podría deducir que el peso
influye su momento de inercia, aunque los coeficientes indican que la bondad del ajuste
no es el mejor que se ha obtenido para otras agrupaciones.
98
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por altura de eje
Tabla 3.9. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su altura de eje.
Altura de eje
n
r2
r
a
B
56 – 100 mm
517
0.8271
0.6841
0.0261
-0.0001
101 – 200 mm
916
0.8627
0.7444
0.0283
0.0029
201 – 300 mm
551
0.8623
0.7436
0.0578
-0.6024
301 – 450 mm
640
0.8798
0.7741
0.0377
-0.1009
600
800
1000
50
56 ‐ 100 mm
101 ‐ 200 mm
40
J(kg.m²)
201 ‐ 300 mm
301 ‐ 450 mm
30
20
10
0
0
200
400
M·h²(kg.m²)
Fig. 3.7. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su altura de
eje.
Aunque se observa una clara diferencia entre las rectas estimadas para cada
agrupación de máquinas por altura de eje, no se puede afirmar que mayor altura de eje
corresponda a mayor pendiente de la recta, o viceversa. En concreto para la muestra
analizada, la recta estimada para las máquinas con una altura de eje comprendida entre
301 y 450 mm presenta una pendiente menor que la obtenida para las máquinas con
altura de eje comprendida entre 201 y 300 mm, lo cual no parece lo más lógico a priori.
99
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por clase de eficiencia o rendimiento declarado por el fabricante
Tabla 3.10. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a)
y ordenada en origen (b) para la estimación del momento de inercia en máquinas según su clasificación de eficiencia
tipo IE catalogada por el fabricante.
Clase eficiencia
n
r
r²
a
B
IE1
590
0.9525
0.9074
0.0392
-0.1799
IE2
1127
0.9284
0.8621
0.0349
0.0321
IE3
376
0.8912
0.7943
0.0462
-0.1998
IE4
57
0.8958
0.8026
0.0506
-0.1288
S/Clas.
474
0.9450
0.8932
0.0375
0.0792
50
IE1
J(kg.m²)
40
IE2
IE3
30
IE4
S/Clas.
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 3.8. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su clase de
eficiencia.
Como se presuponía, la clase de eficiencia por la que el fabricante puede clasificar
a una máquina no tiene influencia en el momento de inercia.
100
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por clase de eficiencia o rendimiento calculado según Norma IEC
60034:30
Tabla 3.11. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), regresión lineal (a) y
ordenada en origen (b) para la estimación del momento de inercia en máquinas según su clasificación de eficiencia
tipo IE, calculada según exigencias de la Norma IEC 60034:30/2008.
Clase Efic.
n
r
r²
a
B
IE1
566
0.9433
0.8900
0.0368
-0.1095
IE2
912
0.9189
0.8444
0.0377
-0.0804
IE3
600
0.9215
0.8492
0.0344
0.0220
S/Clas.
546
0.9692
0.9395
0.0472
0.2208
50
IE1
IE2
J(kg.m²)
40
IE3
30
S/Clas.
20
10
0
0
200
400
600
800
1000
M·h²(kg.m²)
Fig. 3.9. Rectas de regresión del momento de inercia estimado para máquinas clasificadas según su clase de
eficiencia calculada según exigencias de la Norma IEC 60034:30/2008.
Al igual que en la anterior agrupación, en ésta tampoco se puede afirmar que la
clase de eficiencia calculada según la Norma IEC 60034:30/2008, sea determinante en
el momento de inercia de una máquina.
101
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
•
Por velocidad de sincronismo-peso
Una vez analizados los datos numéricos de parámetros y coeficientes y las
gráficas de las anteriores agrupaciones de máquinas, se ha visto que, de todas las
clasificaciones, en la agrupación según la velocidad de sincronismo se obtienen los
mejores coeficientes de determinación y correlación lineal, que indican los mejores
grados de ajuste de las rectas de regresión a los valores de la muestra y los grados de
asociación entre las variables J y M·h².
Por otra parte, en la agrupación de máquinas clasificadas por peso, se ha
observado claramente que la pendiente (a) de las rectas según cada tramo de peso, sigue
una tendencia progresiva en la que a mayor tramo de peso, también la pendiente va
aumentando proporcionalmente, lo que viene a indicar que, según aumenta el peso de la
máquina, también lo hace proporcionalmente su momento de inercia.
Aunque como ya se ha comentado, los coeficientes de determinación y
correlación obtenidos cuando se agrupa la muestra por velocidad de sincronismo son
muy elevados, se ha comprobado que al estimar el momento de inercia de las todas las
máquinas que componen la muestra, los errores relativos que se observan en las
máquinas cercanas al origen de coordenadas son muy elevados. Este hecho no se
aprecia en las figuras puesto que, con la escala en que están representados, parece que
los puntos están muy cercanos a la recta estimada, sin embargo como ya se ha
comentado el error relativo es a veces muy elevado.
Este hecho ha inducido que se proponga una nueva clasificación que agrupe a la
muestra no únicamente por la velocidad de sincronismo, sino también por su peso. De
este modo se han conseguido momentos de inercia estimados con un error relativo
mucho menor.
Se decide entonces agrupar las máquinas por los mismos tramos de peso
anteriores y además, dentro de cada tramo, subdividirlo según las velocidades de
sincronismo correspondientes.
Los resultados obtenidos del estudio de regresión lineal se muestran en la Tabla
(3.12)
102
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Tabla 3.12. Número de máquinas (n), coeficientes de correlación (r), determinación (r²), pendiente (a) y
ordenada en origen (b) para la estimación del momento de inercia en máquinas según su peso y velocidad de
sincronismo(ns)
Frecuencia.
50 Hz
Peso
0 – 50 kg
51-200 kg
201-1000 kg
1001-5000kg
Frecuencia.
60 Hz
Peso
0 – 50 kg
51-200 kg
201-1000 kg
1001-5000 kg
a
b
n
3000
177
0,9561
0,9141
0,0194
-0,0006
1500
184
0,9606
0,9228
0,0287
-0,0002
1000
136
0,9543
0,9107
0,0313
0,0001
750
88
0,9613
0,9241
0,0300
0,0002
3000
143
0,9482
0,8991
0,0151
0,0059
1500
127
0,9493
0,9012
0,0264
0,0021
1000
105
0,9628
0,9269
0,0361
-0,0047
750
56
0,9604
0,9224
0,0411
-0,0194
3000
152
0,9581
0,9179
0,0184
-0,0227
1500
168
0,9715
0,9438
0,0315
-0,0522
1000
132
0,9628
0,9270
0,0435
-0,0498
750
73
0,9523
0,9068
0,0427
-0,0371
3000
100
0,9729
0,9466
0,0227
-0,8053
1500
110
0,9868
0,9737
0,0302
0,3917
1000
106
0,9716
0,9441
0,0444
0,6926
750
59
0,9552
0,9124
0,0408
2,1319
ns
r
r2
ns
n
r
r2
a
b
3600
59
0,9827
0,9657
0,0152
-0,0003
1800
52
0,9669
0,9348
0,0274
0,0001
1200
32
0,9924
0,9848
0,0492
-0,0013
900
23
0,9704
0,9416
0,0325
0,0002
3600
47
0,9772
0,9549
0,0223
-0,0063
1800
46
0,9742
0,9490
0,0378
0,0016
1200
29
0,9826
0,9656
0,0646
-0,0315
900
25
0,9884
0,9770
0,0568
-0,0054
3600
72
0,9585
0,9188
0,0241
-0,0619
1800
72
0,9292
0,8635
0,0395
-0,0242
1200
53
0,9678
0,9367
0,0642
-0,1951
900
44
0,9515
0,9054
0,0586
-0,0729
3600
32
0,9173
0,8414
0,0229
0,3982
1800
47
0,8846
0,7825
0,0333
1,0080
1200
46
0,9462
0,8952
0,0478
1,7439
900
27
0,9719
0,9445
0,0758
-0,8210
103
Método para la estimación del momento de inercia de máquinas de inducción trifásicas a partir de su peso y altura del eje.
Examinando los resultados de la Tabla 3.12, se aprecian unos coeficientes de
determinación con valores muy aceptables superando la gran mayoría de las veces el
valor de 0.9, lo que indica un buen ajuste en la relación de las variables. También se
aprecia dentro de cada tramo de peso que la pendiente de la recta es inversamente
proporcional a la velocidad de sincronismo y directamente proporcional al peso, es
decir, el momento de inercia es menor a mayor velocidad y mayor a mayor peso de la
máquina.
3.2.4 Comparación de resultados
Para determinar cuál sería entonces la agrupación con el mejor ajuste entre J y
M·h² se calcula en la hoja de datos el momento de inercia estimado con este método,
tanto para la muestra en general como para las agrupaciones por velocidad de
sincronismo y por velocidad de sincronismo-peso y se comparan los resultados con el
momento de inercia real declarado en el catálogo por el fabricante, obteniendo también
el error relativo para cada máquina.
Las desviaciones de los errores con respecto a la línea de tendencia pueden ser
valores positivos o negativos según estén gráficamente por encima o por debajo de
dicha línea. Para determinar el promedio de las desviaciones se elevan al cuadrado las
desviaciones absolutas y se comparan los resultados para cada agrupación.
El resultado obtenido arroja los mejores valores de la estimación del momento de
inercia, para la agrupación de las máquinas por velocidad de sincronismo-peso, con un
porcentaje de error promedio acotado del ± 10.98%.
Se propone, por tanto, la utilización de los parámetros a y b de la Tabla (3.12)
como los más adecuados para su utilización en la estimación del momento de inercia de
una máquina de inducción trifásica con rotor en jaula de ardilla, conociendo solamente
los datos de su peso y altura de eje, a través de la fórmula:
J = a ⋅ (M ⋅ h 2 ) + b
104
(3.17)