Berrocoso, M., Páez, R., Sánchez-Alzola, A., Gárate, J., Hermosilla, A.
Anuncio

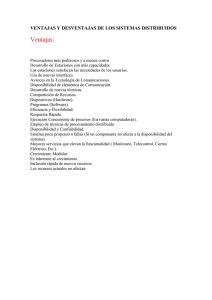
Una red de estaciones permanentes GPS para Andalucía (1) (1) (1) (2) (3) M. Berrocoso , R. Páez , A. Sánchez-Alzola , J. Gárate , A. Hermosilla (1) Laboratorio de Astronomía, Geodesia y Cartografía. Departamento de Matemáticas. Facultad de Ciencias. (2) (3) Campus de Puerto Real. Universidad de Cádiz. 11510 Puerto Real (Cádiz). España. Correo-electrónico: [email protected] Servicio de Satélites. Sección de Geofísica. Real Instituto y Observatorio de la Armada. 11100 San Fernando (Cádiz) España Instituto de Cartografía de Andalucía.. Consejería de Obras Públicas y Transporte. Sevilla. España Resumen La observación permanente de satélites de los diferentes sistemas GNSS ha significado, en la última década, un paso importante en las aplicaciones a la Geodesia y a la Geodinámica. Existen en la actualidad numerosas estaciones permanentes integradas en diferentes redes geodésicas nacionales o internacionales. Las estaciones permanentes GPS proporcionan datos geodésicos con las suficientes garantías para su correcta utilización, generalmente en postproceso, científica o tecnológica. En España existen en la actualidad más de una centena de estaciones permanentes instaladas y gestionadas por diferentes organismos oficiales o instituciones privadas que además de las habituales observaciones GPS suministran correcciones diferenciales para posicionamientos en tiempo real. La Conserjería de Obras Públicas y Transportes de la Junta de Andalucía a través del Instituto de Cartografía de Andalucía esta implantando una red geodésica de seguimiento de satélites GPS denominada Red Andaluza de Posicionamiento, red RAP, en donde el Laboratorio de Astronomía, Geodesia y Cartografía (LAGC) de la Universidad de Cádiz es responsable del diseño, desarrollo, control de calidad y mantenimiento geodésico de la red. El objetivo principal de la red RAP consiste en suministrar datos GPS bien en formato RINEX para posicionamientos estáticos en postproceso o bien correcciones diferenciales para posicionamientos en tiempo real emitidas, RTK ó DGPS, desde las estaciones que conforman la red. Existen diferentes vías de acceso a los datos y según su utilización y propósito se obtendrán distintas precisiones en el posicionamiento final. La red RAP consta de 22 estaciones permanentes distribuidas homogéneamente de manera que permiten solucionar el problema del posicionamiento en todo el territorio andaluz incluida la franja costera. La red está referida al marco ITRF y constituye el marco de referencia geodésico en Andalucía para aplicaciones científicas y tecnológicas, tales como el control geodinámico de Andalucía; en determinaciones precisas del geoide; en la obtención de modelos troposférico e ionosférica y en estudios climatológicos regionales; para el establecimiento de puntos de apoyo para vuelos fotogramétricos; para la georeferenciación de imágenes satélites; par el establecimiento de puntos de control para redes de referencia en grandes obras civiles; para aplicaciones topográficas y apoyos a actualizaciones catastrales; para gestión de ámbitos agrícolas; para aplicaciones SIG; para navegación terrestre, marítima y aérea, etc. En este trabajo se muestran precisamente las actuaciones realizadas para el diseño de la red y la ubicación de las estaciones; para la organización y el control de calidad de los datos y de las propias estaciones y finalmente se explica la metodología establecida para el cálculo y ajuste de la red RAP. 1. Diseño y desarrollo de la red RAP La red RAP se ha diseñado en dos fases distintas, estableciéndose las diferencias en base al equipamiento de las estaciones y a su localización. Las estaciones de la primera fase disponen más equipamiento y están localizadas en las ocho capitales de provincia más Algeciras. En cambio las de segunda fase cuentan con un equipamiento más reducido, aun siendo de características geodésicas y están situadas en núcleos con menor población. Los emplazamientos de las estaciones de la red RAP se han seleccionado en base a un análisis espacial realizado con el software ArcGIS 9.0 de ESRI, donde se han impuesto los criterios de distribución geométrica homogénea, máxima cobertura de la población y máxima cobertura costera, y por supuesto se ha tenido en cuenta la disponibilidad de 22 equipos receptores de los cuales 9 estaban dotados de más prestaciones que los 13 restantes. El primer resultado obtenido es que en todas y cada una de las 8 capitales de provincia debía instalarse una estación; además, se impuso la necesidad de que para servir de apoyo a la navegación en el Estrecho de Gibraltar otra estación se instalaría en Algeciras. Esta configuración de la primera fase determinó en gran medida la ubicación de las estaciones de la segunda. En la figura 1 se muestra la distribución final que mejor satisface los condicionantes impuestos. En el diseño final las estaciones tienen una separación aproximada de entre 50 y 70 Km. unas de otras, garantiza el servicio de correcciones diferenciales en el 100% del territorio, ya sea directamente por radio o vía Internet. Figura 1. Mapa de distribución de las estaciones. CODE UCAD HULV ALGC SEVI MALG GRAN ALMR CRDB UJAE ROND OSUN LEBR ARAC POZO CAAL ANDU VIAR CAST CABR CAZA MOTR HUOV STAGE 1 1 1 1 1 1 1 1 1 2 2 2 2 2 1 2 2 2 2 2 2 2 RAP ID No. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 EUREF DOMES No. 13455M001 13451M002 13456M001 13457M001 13460M001 13459M001 13437M002 13461M001 13458M001 13464M001 13465M001 13466M001 13467M001 13468M001 No asignado No asignado No asignado No asignado No asignado No asignado No asignado No asignado LOCATION Puerto Real (Cádiz) Huelva Algeciras (Cádiz) Sevilla Málaga Granada Almería Córdoba Jaén Ronda (Málaga) Osuna (Sevilla) Lebrija (Sevilla) Aracena (Huelva) Pozoblanco (Córdoba) Calar Alto (Almería) Las Viñas (Jaén) Villanueva del Arzobispo (Jaén) Castril (Granada) Cabra (Córdoba) Cazalla de la Sierra (Sevilla) Motril (Granada) Huercal Overa (Almería) Tabla 1. Código, fase, número identificador RAP, número identificador EUREF y localización de las estaciones que conforman la red RAP Actualmente están instaladas 17 de las 22 estaciones, entre las que se encuentran todas las de la primera fase, funcionan plenamente estas últimas y ROND (Ronda). El resto se encuentran pendientes de ser conectadas con el Centro de Control. Diez de las estaciones están ubicadas en hospitales de la red sanitaria andaluza. Esto se debe al hecho de que estos edificios constituyen unas de las mayores alturas de los núcleos urbanos facilita el envío de las correcciones diferenciales vía radio en las ciudades, proporcionando mayores zonas de visión directa entre el usuario y la emisora de la estación; además disponen de alimentación eléctrica ininterrumpida con grupos electrógenos autónomos de emergencia en caso de corte en el suministro y todos los hospitales seleccionados pertenecen a la red corporativa de telecomunicaciones de la Junta de Andalucía, con lo que se garantiza el enlace permanente entre el Centro de Control y la estación mediante una conexión a Internet de banda ancha. La estación CAAL (Calar Alto) está situada en las instalaciones del Centro Astronómico Hispano Alemán que permitirá conectar marcos de referencia celeste y terrestre, suponiendo un valor añadido a esta red. Por ello, aunque inicialmente esta estación se consideró de la segunda fase, ha pasado a transformarse en una más de la primera fase. La instalación de los vértices se ha realizado prácticamente de igual modo en todos los emplazamientos, excepto en Calar Alto. La monumentación ha consistido en un mástil cilíndrico hueco de acero, de 10 centímetros de diámetro y un centímetro y medio de espesor que, dependiendo de la ubicación de la estación, está fijado mediante dos abrazaderas soldadas y atornilladas a una pared vertical, ver figura 2, o puede tener una base metálica cuadrada de 20 centímetros de lado y atornillada a un pilar del edifico en el que se encuentre la estación, Figura 3; en algunos casos, este cilindro se encuentra soldado directamente a la estructura del edificio, Figura 4. En el caso de la estación de Calar Alto, el vértice es un pilar geodésico enraizado en el terreno y sobre el que se ha fijado un cilindro de acero de dos metros de altura. Para asegurar más su estabilidad en caso de fuertes vientos, se le colocaron tres cables de acero desde el extremo del mástil al suelo. Figura 2. Estación CRDB Figura 3. Estación UCAD Figura 4. Estación ALGC La instrumentación instalada en las estaciones de la red RAP difiere según la fase a la que pertenezca. Las estaciones de la primera fase tienen los siguientes elementos: antena geodésica choke-ring (Dorne–Margolin) Leica AT504 con domo; receptores de doble frecuencia Leica GRX1200 Pro, con 4 puertos RS232 y un puerto ethernet con 3 direcciones IP independientes; sistema de alimentación ininterrumpida y conexión permanente a Internet permanente; estación meteorológica Paroscientific Met3 (presión, humedad y temperatura) y dos radiomodems: PacificCrest y Satelline3AS. Las estaciones de la segunda fase no disponen ni de estación meteorológica, ni de radiomodems, además la antena geodésica no es del tipo Choke-Ring. Figura 5. Componentes de una de las estaciones de la primera fase: receptor GPS bifrecuencia, antena geodésica con dispositivo choke-ring, estación meteorológica, radiomodems para envío de coordenadas diferenciales RTK. 2. Control de calidad de las estaciones y de los datos observados El control de calidad en una red de estaciones GPS permanentes se realiza continuamente para asegurar al usuario una óptima utilización de los datos observacionales que la red ofrece. Este control de calidad se realiza con el objetivo principal de analizar la estabilidad y calidad temporal tanto de las estaciones como de los datos GPS observados. La calidad de una red geodésica no depende exclusivamente de los equipos instalados sino en gran medida de la ubicación física de la estación. El control de calidad de las estaciones se realiza mediante el análisis de diversos factores relacionados con: la presencia de obstáculos en el horizonte de la estación; los efectos de reflexión de la señal; la potencia e intensidad de la señal recibida; la relación señal-ruido; el número de observaciones realizadas y la estabilidad de la posición de navegación. Para evaluar los obstáculos que puedan impedir la recepción de la señal se representan gráficamente las coordenadas altacimutales de los satélites observados en donde además se manifiestan los obstáculos existentes y su proyección en este sistema de coordenadas (Figura 6). Estas gráficas se obtienen con el software libre QC2SKY (Roggero, 2004). El análisis de estas gráficas permite determinar la influencia de dichos obstáculo en las observaciones realizadas. Para el estudio del efecto multipath en cada una de las frecuencias L1 y L2 se establece una proyección cenital de las trayectorias de los satélites observados donde con un código de color se distinguen en función del acimut las zonas donde las reflexiones de la señal es mayor. Para mitigar estos efectos se establece un horizonte ficticio de 10º y se utilizan antenas geodésicas dotadas de dispositivo choke-ring. 90º Efecto multipath en la L1 en la estación UCAD 0 m. 0.5 m. 1.0 m. Efecto multipath en la L2 en la estación UCAD 1.5 m. 2.0 m. 0º Acimut versus elevación de los satélites observados desde la estación UCAD. Se distingue un obstáculo en la dirección sur que coincide con el edifico CASEM. Figura 6. Proyecciones de las coordenadas horizontales de los satélites observados desde la estación UCAD Para estudiar la intensidad de recepción de la señal y ver cuál es la relación señal/ruido en las frecuencias L1 y L2 se generan gráficas diarias por horas que representan en código de colores la información que contienen los ficheros RINEX. En caso existencia de alguna incidencia la información se complementa con la contenida en las Notice Advisory to NAVSTAR Users, NANU’s, emitidos por el Centro de Guardacostas Estadounidense, para determinar si la incidencia se debe al satélite o a la estación. Figura 7. Ejemplo de gráfica de intensidad para la recepción de la frecuencia L1 en la estación HULV (05-02-2006) Figura 8. Ejemplo de gráfica de la relación señal/ruido en la frecuencia L1 en la estación HULV (05-02-2006) Para analizar el número de observaciones obtenidas respecto a las previstas se calculan a partir de las efemérides transmitidas las posibles observaciones que de cada satélite se podrían realizar y se compara con las realmente observadas proporcionando este parámetro una información sobre las posibilidades de la estación y no sobre los datos. Para el análisis de la estabilidad de la posición de navegación se estudia la variación en la posición calculada cada segundo a partir del código C/A. En la Figura 9 se representa la proyección horizontal de estas posiciones en donde más del 90% de estas posiciones se encuentran en el interior de una circunferencia de radio 7,5 m. Figura 9. Representación horizontal de la posición de navegación calculada cada segundo para la estación UCAD durante 48 horas. El control de calidad de los datos se realiza mediante la comparación con los obtenidos por las estaciones de otras redes internacionales, EUREF e IGS, de calidad contrastada. Para ello se utiliza el software TEQC (Translate/Edit/Quality Check) de UNAVCO (University NAVSTAR Consortium), que permite realizar diversos análisis a partir de los datos observados en formato RINEX. También se dispone de una serie de aplicaciones programadas en lenguaje MSDOS y MATLab, creadas específicamente por el Laboratorio de Astronomía, Geodesia y Cartografía (UCA) para realizar este control de calidad. Inicialmente se evalúa el número de observaciones realizadas frente a las predichas (Figura 10) y se admite el criterio establecido por el Internacional GNSS Service (IGS) que expresa que para una estación permanente con el horizonte despejado y con un intervalo de seguimiento de 30 segundos el número normal de observaciones esperadas debe ser aproximadamente de 20.000 observaciones diarias. Figura 10. Número de observaciones esperadas y obtenidas en los últimos 45 días en la estación UCAD y gráfica de comparación con el resto de las estaciones. Otros de los parámetros esenciales el error cuadrático medio del efecto multipath, tanto en la señal L1 (Figura 11) como en la señal L2 (Figura 12) y el número de saltos de ciclo por observaciones obtenidas (Figura 13). El efecto multipath de la señal L1 y L2 viene expresado por las siguientes fórmulas: 2 2 MP1 = PD1 − 1 + Φ1 + Φ2 α −1 α −1 , 2α 2α − 1 Φ 2 MP 2 = PD2 − Φ1 + α −1 α −1 , 2 dondeα = f12 Φ1, ,Φ 2 son las fases de la portadora y PD1 y PD2 son las pseudodistancias f2 asociadas a las frecuencias L1 y L2, respectivamente. El valor del parámetro MP1 para el 50% de las estaciones de la red IGS es inferior a 0.4 metros y para el 30% inferior a 0.5 metros. En el caso de la señal L2 los valores respectivos son 0.6 metros y 0.75 metros. Figura 11. Efecto multipath en la señal L1 registrado en los últimos 45 días en la estación UCAD y gráfica de comparación con el resto de las estaciones. Figura 12. Efecto multipath en la señal L2 registrado en los últimos 45 días en la estación UCAD y gráfica de comparación con el resto de las estaciones. Para evaluar el número de discontinuidades en la recepción de la señal existentes en cada sesión de observación, se considera la expresión: S /O = Pérdidas de ciclo × 1000 Observaciones totales , donde las observaciones totales se corresponden con las observaciones realizadas sobre un horizonte de 10º de altura. Este parámetro representa el tanto por mil de las pérdidas de ciclo frente al número total de observaciones. Para que este valor no resulte nunca 0, siempre se considera que al menos hay una pérdida de ciclo. La mitad de las estaciones de la red IGS poseen un valor inferior a 5 y dos tercios de ellas están por debajo de10. Figura 13. Pérdidas de ciclo (x1000/Nº Obs.) registrados en los últimos 45 días en la estación UCAD y gráfica de comparación con el resto de las estaciones. 3. Cálculo y ajuste de la red La solución final del proceso que conlleva el establecimiento de una red geodésica consiste en dotar de coordenadas absolutas geodésicas o cartesianas geocéntricas a las estaciones que conforman la red. Para ello, y una vez que se han construido los ficheros con los datos procedentes de las observaciones GPS y se han obtenido de distintas fuentes los datos auxiliares necesarios, se realiza un posicionamiento preciso entre las estaciones de la red para posteriormente efectuar un ajuste de la red teniendo siempre como referencia estaciones fijas de redes superiores. Para todo este proceso se utiliza el software Bernese GPS versión 5.0, desarrollado por el Instituto Astronómico de la Universidad de Berna (Suiza). De manera general, las observaciones GPS se realizan durante 24 horas continuadamente con una frecuencia de muestreo de 1 hercio y una máscara de elevación de 0º, aunque en el procesado de los datos se consideran observaciones cada 30 segundos y se establece una máscara de elevación de 10 º para disminuir el efecto de la refracción atmósférica. El proceso de cálculo y ajuste de la red se realiza semanalmente con el software Bernese 5.0. Se calcula una coordenada diaria para cada estación que resulta del procesado relativo de las baselíneas definidas y que se forman mediante el enlace de una estación de la red RAP y la más próxima a ella perteneciente a la red IGS o EUREF dotada de coordenadas absolutas respecto al marco de referencia internacional ITRF2000. Las estaciones que se han considerado son: SFER (San Fernando-ROA), VILL (Villafranca-NASA), ALAC (Alicante-IGN) y CASC (Cascais-IGN Portugal) (ver figura 14). Las soluciones diarias se combinan realizando un ajuste por mínimos cuadrados obteniéndose una solución semanal para cada estación. Finalmente se realiza el ajuste final de la red en donde se fijan las estaciones mencionadas para cada época considerada, constituyendo de este modo el marco de referencia de toda la red RAP. Figura 14. Localización de las estaciones y baselíneas procesadas. En la tabla 2 se muestran las coordenadas absolutas obtenidas para las estaciones en funcionamiento de la red RAP. Indicar que los errores asociados son relativos a las estaciones fijadas, pues se ha supuesto que las coordenadas de estas estaciones tienen error nulo. Para realizar un control de calidad del proceso de cálculo y ajuste de la red se incluyen en el procesado aquellas estaciones de la redes EUREF situadas en la región que no hayan formado parte en la solución ITRF2000. De manera que la comparación de las coordenadas obtenidas con las proporcionadas por EUREF para estas estaciones nos permitirán validar los cálculos realizados además de detectar otras fuentes de error ajenas al propio procesado y que pueden ser achacables, por ejemplo, a problemas en los datos de las estaciones de la red RAP o incluso de las estaciones de la red EUREF que se hayan incluido. En las figuras 15, 16, 17, 18 y 19 se muestran las diferencias entre las soluciones semanales calculadas por EUREF y las soluciones semanales calculadas según la metodología presentada para la red RAP en las estaciones ubicadas en Almería (ALME-IGN), Ceuta (CEUTIGN) y Rabat (RABT-Marruecos). En el caso de CEUT y RABT, se muestras los resultados incluyendo las semanas en las que no entraron en el ajuste EUREF y también eliminando dichas semanas. Tabla 2. Coordenadas de las estaciones de la primera fase y los errores asociados. CEUT X Y Z 0,20 0,15 0,10 0,05 1381 1376 1371 1366 1361 1356 1351 1346 1341 1336 1331 1326 1321 -0,05 1316 0,00 1311 Diferencias (m) -0,10 Semana GPS DESV. EST. MEDIA 0,0156 0,0094 0,0185 -0,0014 0,0179 0,0038 Figura 15. Diferencias en las coordenadas de CEUT, incluyendo la semana 1371. CEUT X Y Z 0,04 0,03 0,02 0,01 1381 1376 1366 1361 1356 1351 1346 1341 1336 1331 1326 1321 -0,01 1316 0,00 1311 Algeciras Almería Cádiz Granada Huelva Jaén Córdoba Málaga Sevilla Ronda Diferencias (m) ESTACIÓN COORDENADAS REFERIDAS AL ITRF2000 (Epoca 2000.6) FECH. X Y Z σx σy ID INSTAL. ALGC 2006/03/22 5135570.508 -489449.412 3738221.996 0.007 0.001 ALMR 2006/03/15 5104673.806 -217597.597 3805329.897 0.007 0.001 UCAD 2005/02/17 5101056.471 -555223.441 3775752.867 0.006 0.001 GRAN 2005/11/10 5077906.315 -319058.462 3834733.453 0.020 0.002 HULV 2006/01/16 5044358.066 -611644.034 3842260.306 0.004 0.001 UJAE 2005/03/26 5036324.959 -332898.825 3887177.333 0.006 0.002 CRDB 2006/02/22 5023360.508 -420749.004 3894832.329 0.004 0.001 MLGA 2006/02/23 5103686.642 -395880.018 3792209.294 0.006 0.001 SEVI 2006/04/08 5049343.807 -528173.281 3848027.144 0.003 0.001 ROND 2006/03/22 -0,02 -0,03 Semana GPS DESV. EST. 0,0114 0,0060 0,0068 MEDIA 0,0106 -0,0006 0,0019 Figura 16. Diferencias en las coordenadas de CEUT, eliminando la semana 1371. σz 0.004 0.004 0.004 0.008 0.002 0.004 0.003 0.004 0.002 ALME X Y Z 0,04 0,02 0,01 1383 1377 1371 1365 1359 1353 1347 1341 1335 1329 1323 -0,01 1317 0,00 1311 Diferencia (m) 0,03 -0,02 -0,03 Semana GPS DESV. EST 0,0112 0,0058 0,0069 MEDIA 0,0082 -0,0010 0,0005 Figura 17. Diferencias en las coordenadas de ALME entre las semanas 1311 y 1385. RABT X Y Z 0,20 0,10 0,05 1384 1382 1380 1378 1376 1374 1372 1370 1368 -0,05 1366 0,00 1364 Diferencia (m) 0,15 -0,10 Semana GPS DESV. EST. 0,0189 0,0349 0,0303 MEDIA 0,0186 -0,0015 0,0116 Figura 18. Diferencias en las coordenadas de RABT, incluyendo la semana 1374. RABT X Y Z 0,04 0,03 0,02 0,02 0,01 0,01 1384 1382 1380 1378 1376 1372 1370 -0,01 1368 -0,01 1366 0,00 1364 Diferencia (m) 0,03 -0,02 Semana GPS DESV. EST. 0,0055 0,0021 0,0046 MEDIA 0,0225 -0,0089 0,0053 Figura 19. Diferencias en las coordenadas de RABT, eliminando la semana 1374. 4. Servicios de la red RAP La red RAP ofrecerá, en situación de operatividad total, ficheros RINEX con observaciones realizadas según diferentes frecuencias de muestreo para posicionamiento relativo de precisión y correcciones diferenciales vía RTK o Internet para posicionamientos submétricos en tiempo real. El acceso a datos a los datos para posproceso mediante la adquisición de ficheros RINEX define el servicio denominado RAP-FTP. El envío de correcciones diferenciales en tiempo real se realizará mediante otros dos servicios distintos denominados RAP-RTK y RAP-IP. El servicio RAP-FTP ofrece la posibilidad de descargar archivos RINEX, almacenados en el servidor Web de la red RAP, de todas las estaciones que conforman la red. Requiere de un PC, conexión a Internet y de un software de procesado de datos GPS, ya sea científico (Bernese, GIPSY, etc.) o comercial (Leica GeoOffice, Trimble Geomatic Office, etc.). Los ficheros que se ofrecen a los usuarios son de tres tipos: archivos RINEX de 24 horas de duración con datos registrados cada 30 segundos, archivos RINEX de 1 hora de duración con datos registrados cada 5 segundos y archivos RINEX meteorológicos de 24 horas de duración con datos registrados cada 5 minutos (solo para estaciones de la primera fase). El servicio RAP-RTK que proporciona la emisión de correcciones de código y fase sólo se empleará en las estaciones de la primera fase. Requiere de la disposición de radio módems por parte de los usuarios. Con este sistema se consiguen mayores precisiones en tiempo real teniendo un alcance de entre 10 y 15 Km., limitado por las condiciones topográficas y ambientales, requiriendo una visión directa entre el usuario y la antena emisora. El servicio RAP-IP consiste en la transmisión vía Internet de correcciones diferenciales de código y fase. Para el uso de este sistema lo más idónea es disponer de una conexión bidireccional entre el usuario y el centro de control. El esquema de transmisión consiste en el envío por parte de un caster (centro de distribución de correcciones o datos), que en este caso es el centro de control instalado en el LAGC, vía Internet, GPRS o UMTS de unas correcciones para la localización geográfica en la que se encuentra el usuario. Este necesita de una aplicación cliente NTRIP y de un acceso a Internet bien mediante un sistema WIFI, línea telefónica, CDPD módem, etc. y de herramientas como una PDA, ordenador portátil o teléfono móvil con sistema GPRS/UMTS que conecte con el equipo GPS, si este no estuviera preparado para ello. El usuario se conecta al caster y o bien escoge la estación desde la que quiere recibir las correcciones diferenciales o envía su posición aproximada al caster y este decide de qué estación debe enviarle las correcciones diferenciales más idóneas para su posición. Referencias Aparecido, J. (2002). Controle de qualidade dos dados GPS da RBMC (Relatorio Final). Relatório Científico de Bolsa de Pesquisa de Iniciaçao Científica – FAPESP (Proceso n. 01/03145-2), correspondente ao período de Julio/2001 a Junho/2002. Berrocoso, M., Ramírez, M. E., Pérez-Peña, A., Enríquez-Salamanca, J. M., Fernández, A., Torrecillas, C. (2004). El sistema de posicionamiento global. Servicio de Publicaciones de la Universidad de Cádiz. Beutler, G., Bock, H., Brockmann, E., Dach, R., Fridez, P., Gurtner, W., Habrich, H., Hugentobler, U., Ineichen, D., Jaeggi, A., Meindl, M., Mervant, L., Rothacher, M., Schaer, S., Schmid, A., Springer, T., Steigenberger, P., Svehla, D., Thaller, D., Urschl, C., Weber, R. (2005). Bernese Software. Version 5.0 Draft. Printing Office of the University of Bern, Astronomical Institut of the University of Bern. Boucher, C. and Altamini, Z. (1996). International Terrestrial Reference Frame. GPS V7-N9, disponible en ftp://lareg.ensg.ign.fr/pub/itrf/ITRF.TP World, Estey, L. H., Meertens, C. M. (1999). TEQC: The multi-purpose toolkit for GPS/GLONASS data. GPS solutions, Vol 3, No. 1, pp. 42-49. EUREF Permanent Network. http://www.epncb.oma.be Gurtner, W. (2001). RINEX: The Receiver Independent Exchange Format Version 2.10. http://www.aiub.unibe.ch/download/rinex/rinex210.txt Gurtner, W., Estey, L. (2006). RINEX: The Receiver Independent Exchange Format Version 2.11. http://www.aiub.unibe.ch/download/rinex/rinex211.txt IGS, International GPS Service. http://igscb.jpl.nasa.gov Controllo di qualità delle osservazioni GPS. Il Facoltà di Ingegneria. Politecnico di Torino. Topografía – Ricerca. http://www.vercelli.polito.it/civili/topo0105.htm Takacs, B., Brunyninx, C. (2001). Quality checking the raw data of the EUREF permanent network. Presented at the EUREF Symposium, May 16-18, 2001,Dubrovnik, Croatia. Takacs, B., Bruyninx, C. (2002). Quality Checking the RINEX data of the EUREF Permanent Network. EUREF Publication 10, Eds. J. Torres, H.Hornik, Bundesamt für Kartographie und Geodäsie, Publ. 23, 53-61. Ritcher, B., Euler, H. J. (2001). Study of improved observation modeling for surveying type applications in multipath environment. ION GPS 2001 Procceedings. Salt Lake City,Utah, USA. RTCM Recommended Standards for differential NAVSTAR GPS reference station and integrity monitors (RSIM). Version 1.0. Developed by RTCM Special Committee No.104. UNAVCO, University NAVSTAR Consortium. http://www.unavco.org