SEGUIDOR SOLAR ECONÓMICO DE UN EJE 04.43
Anuncio

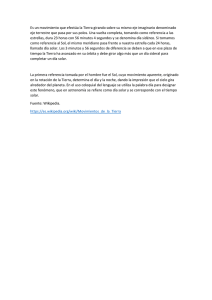
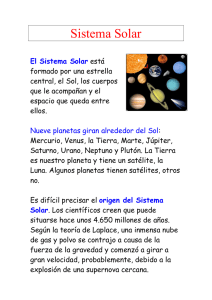
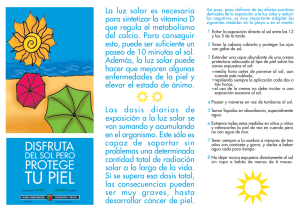
SEGUIDOR SOLAR ECONÓMICO DE UN EJE G. Gareis1, J. Stivanello2, M. Benito3, F. Cuestas4 Laboratorio de Energías Alternativas – Universidad Tecnológica Nacional Facultad Regional Paraná Universidad Tecnológica Nacional Facultad Regional Paraná – Almafuerte 1033 C.P. 3100 – Entre Ríos Tel: 0343-4243054/4243694 – Fax: 0343-4243589 e-mail: [email protected] RESUMEN: Lo que se pretende con el presente trabajo es la descripción de un seguidor solar económico de un eje para mejora de rendimiento en época invernal en zonas del litoral. Se sabe que la zona del litoral argentino no se caracteriza por poseer excelentes niveles de radiación solar la cual además se ve perturbada en gran medida por variaciones climáticas (nubosidades, precipitaciones, etc). Se sabe también que existen bastas zonas con ausencia de red eléctrica. Fijando una inclinación óptima para dicha época del año y logrando el movimiento acimutal (este-oeste), es posible aumentar el rendimiento del panel. El movimiento diario no parte del sensado de la posición del astro, sino de una estimación de la misma por medio de cálculos hechos por el controlador del sistema. Palabras clave: seguidor solar, día solar, microcontrolador (MCU). INTRODUCCIÓN Las condiciones climáticas en el litoral argentino no son las óptimas para la generación de energía solar fotovoltaica por ser un clima cálido-húmedo, tener lluvias regulares y una cantidad considerable de días nublados. Aún así, se alcanzan niveles medios de radiación solar, llegando en invierno a tener 3 horas solares pico. Por otro lado, existen gran cantidad de lugares que no poseen energía eléctrica debido a que estamos en presencia de una zona de grandes extensiones de campo y monte; en muchos de estos lugares existen pueblos pequeños, escuelas rurales, o campos particulares que tienen la necesidad de electricidad. El seguidor diseñado, que contempla una parte electrónica y otra estructural, pretende ser una solución en cuanto a costos de un sistema de generación de energía mediante paneles fotovoltaicos. Las premisas para el diseño del mismo fueron: - Bajo costo y robustez. - Estructura simple (posibilidad de que sea realizada por herrero, sin piezas mecanizadas). - Electrónica simple de fácil uso para el usuario. - Libre mantenimiento. A raíz de esto se diseñó dentro del Laboratorio de Energías Alternativas un sistema de seguimiento de un, usando materiales fáciles de conseguir para realizar la estructura de gran robustez sumado a un control electrónico sencillo y además una gran robustez. En el sistema es posible montar 3 paneles, con una superficie total receptora de 2 [m2]. El aumento de eficiencia puede llegar a un 20 % en relación a la energía generada sin seguidor (sin datos aún) y el costo no representa más de 1/3 del costo de 2 [m2] de paneles solares. SEGUIDOR SOLAR DE UN EJE - CONTROL ELECTRÓNICO – GENERALIDADES El corazón del sistema es un Microcontrolador. Por otro lado, consta con un driver para motores de corriente continua y un driver para norma RS-232 para la comunicación con la PC para las configuraciones que se le hacen al programa del microcontrolador las cuales son básicamente, el seteo de la fecha y hora de inicio. Por otro lado, se cuenta con un motorreductor. Básicamente, el sistema posee en memoria por un lado, los datos de salida del sol de todo el año y por otro, el intervalo de tiempo que debe esperar entre cada paso de avance para cada día en particular, es decir divide su trayectoria de movimiento en función de dicho rango. La división esta dada a partir de la cantidad de dientes que posee la corona asociada al motorreductor de corriente continua. Cada diente supondrá el delta de tiempo que tendrá que esperar para efectuar un nuevo movimiento. • • • Sistema microcontrolado. Bajo consumo Posibilidad Conexión PC para configuración 1 Becario Laboratorio Energías Alternativas Becario Laboratorio Energías Alternativas 3 Becario Laboratorio Energías Alternativas 4 Becario Laboratorio Energías Alternativas 2 04.43 • • • • • • RTC (Reloj de Tiempo Real) Modo Funcionamiento Normal / Modo Configuración / Modo Bajo Consumo Línea de realimentación para protección motor Detección de batería baja y/o desconexión Batería auxiliar Sensado Óptico Figura 1: Diagrama de Bloques control electrónico. Funcionamiento del sistema Debido a que la realización de un sistema basado en el sensado de la radiación como variable a medir para estimar la posición del sol se ve afectado por un sinnúmero de inconvenientes, se implementó una lógica basada en los horarios de salida y puesta del sol diarios y en función de estos, la duración del día solar. En primer término, el sistema basa su funcionamiento mediante la estimación de la posición solar. Para esto, se grabaron en memoria FLASH del MCU por un lado los valores de salida de sol de todo un año y por otro, el intervalo de tiempo de espera para realizar un paso equivalente a un diente de la corona solidaria al motor. El delta de tiempo se calculó en función del horario de puesta y de salida del sol conjuntamente con el valor constante de cantidad de dientes de la corona. Figura 2: Mapa de memoria FLASH del MCU. Ejemplo de cálculo del delta t: Día 25/09 Cantidad Dientes Horario Salida 06:47 Horario Puesta 19:00 40 Tabla 1: Cálculo delta t (1) 04.44 (2) Es decir que en memoria se guardó el valor 6:47[hs] (horario de salida) y 20[min] (delta de tiempo) de manera tal de llegar a las 19hs de ese día con el panel en la posición 40 de los dientes y por ende, al final de la trayectoria de la celda (es decir, con la misma apuntando al oeste) La información fue adaptada de manera tal que ambos valores ocupasen 1 byte cada una. Para esto se estructuró el horario de salida de la siguiente manera: Figura 4: Byte de información. Como la hora de salida varía de 5 a 7 de la mañana, con dos bits se puede cubrir esa información. Las decenas de minutos van de 0 a 5 (6 valores) para lo cual basta con 3 bits. En el caso de la unidad de minutos, la cual varia de 0 a 9 (10 valores), nos faltaría cubrir dos valores. Como la exactitud en esta información no es relevante, se considera que si los 3 bits se encuentran en 1, entonces el valor puede ser un 7, 8 ó 9 dejando un margen de error de 2 minutos al horario de salida Así, para el ejemplo anterior, tendremos: 6 01 4 100 7 111 Tabla 2: Byte de información. Es decir, un 103 en decimal. En el caso del intervalo de tiempo, se almacenó como un número decimal considerando la cantidad de minutos de la siguiente manera. Para el ejemplo, para el día 25 Día Horario Salida 25/09 06:47 = 6.7833 Tabla 3: Intervalo de tiempo. Horario Puesta 19:00 = 19 Rango Horario (19 – 6.7833) 12,21 Intervalo de tiempo (40 dientes) 0,3054 = 20[min] El valor 0,3054 multiplicado por 60 nos da aproximadamente 20[min], sólo que, por una cuestión de practicidad, se guardó en FLASH multiplicado por 100 de manera tal de guardar en el byte correspondiente al día 25 (365 posiciones distantes). Reloj de Tiempo Real (RTC) El sistema posee implementado un RTC mediante el cual puede mantenerse actualizada la fecha del sistema. La base de funcionamiento está en el módulo TIM (Timer) del MCU que produce una interrupción cada 1[seg] y en dicha interrupción, se actualizan los datos de minuto, hora, día, mes y año. El diagrama de flujo de la rutina RTC, que se ejecuta cada 1[seg] es el siguiente: Figura 5: Diagrama de flujo RTC. 04.45 Figura 6: Diagrama de flujo firmware. Estructura La premisa que se tomó para el diseño mecánico es el bajo costo y alta accesibilidad a los elementos con que se construye. El prototipo puede construirse con piezas estándar del mercado nacional. Además no solo cuenta con una ventaja económica sino que también resulta ser una solución de baja complejidad de construcción, no requiriendo tecnología de última generación para su manufactura. La estructura consiste en un reticulado confeccionado con caños de sección cuadrada de acero SAE 1020 y chapa de acero laminada. El análisis de esfuerzos de la misma fue realizado con las fuerzas producidas por el peso propio de la estructura y la carga del viento. Este análisis fue verificado mediante el uso de un software de elementos finitos y CAD 3D cuyos resultados pueden observarse a continuación. Figura 7: Resultado de estudio de tensiones con una carga de vientos de 30 m/s (108 Km/h) para tres paneles de 85W. 04.46 Figura 8: Imágenes renderizadas del prototipo final. En la vista posterior se observa la carcaza protectora del sistema. CONCLUSIONES Este diseño de seguidor solar de n eje, es el resultado de mejoras realizadas a un prototipo ya existente realizado en años anteriores en nuestro laboratorio. Dentro de las principales ventajas podemos asegurar que se obtiene un nuevo diseño mecánico en el que prácticamente se pueden colocar paneles de cualquier marca y dimensiones, respetando una superficie máxima de 2 [m2] y un diseño electrónico simple, el cual facilita la puesta en funcionamiento. A su vez se trabajó mucho para que el costo sea el menor posible, no dejando de lado la calidad y robustez del sistema, como así también pensando en mano de obra local, una premisa siempre presente en nuestros proyectos de Laboratorio. El seguidor se está construyendo, se estima que a fines del mes de septiembre se podrán realizar las primeras mediciones y obtener así datos de eficiencia. REFERENCIAS Hugo Grossi Gallegos, Raúl Righini, Carlos Raichijk (2010). VII Curso del Aprovechamiento Energético de la Radiación Solar. Universidad Nacional de Luján. V. M. Faires. Diseño de Elementos de Máquinas (4ta edición). Montaner y Simon S.A. Barcelona. Freescale (2009). Datasheet MC9S08JM60, Rev.3 ABSTRACT The purpose of this paper is a description of a economic single axis solar tracker for performance improvement in winter in rivers areas. It is known that argentine river areas is not characterized by excellent levels of solar radiation which is also greatly disturbed by climatic variations (cloudiness, rainfall, etc). It is also known, that there are vast areas with no mains. Setting an optimum angle for that season of the year and obtaining azimuth motion (east-west), it is possible to increase the performance of the panel. The daily motion sensing is not based from the position of the sun, it is an estimate of it by means of calculations made by the system controller. Keywords: solar tracker, solar day, microcontroller (MCU). 04.47