Coordinación de protección de distancia utilizando métodos de
Anuncio

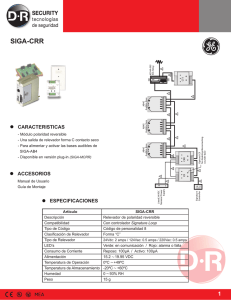
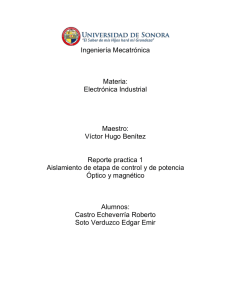
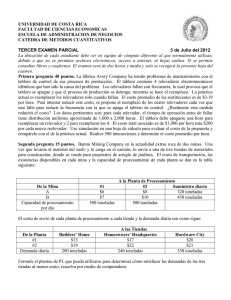
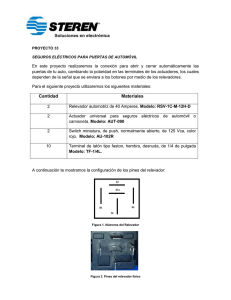
IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 1, MARCH 2008 51 Coordinación de protección de distancia utilizando métodos de búsqueda A. A. Chávez, J. L. Guardado, D. Sebastián y E. Melgoza Resumen— En este trabajo se presenta una metodología para calcular la impedancia de ajuste en las Zonas 2 y 3 de relevadores de distancia, de manera que no existan problemas de coordinación de protecciones durante la ocurrencia de fallas y/o cambios en la topología del sistema. El método propuesto se basa en la impedancia vista por el relevador de distancia cuando se simula una falla en nodos adyacentes. La coordinación y ajuste de los relevadores se obtiene mediante algoritmos computacionales desarrollados para analizar la topología de la red, determinar el conjunto de pares de relevadores primariorespaldo y efectuar estudios de cortocircuito para la evaluación de diferentes tipos de fallas en un sistema eléctrico de potencia. Lo anterior se realiza en un ambiente de programación orientado a objetos lo cual permite al usuario un ambiente más versátil al momento de interaccionar con el software. En el desarrollo de esta herramienta se utilizan métodos de búsqueda basados en Teoría de Grafos. Los algoritmos y metodologías desarrolladas se aplican a un sistema de potencia de 14 nodos propuesto por IEEE [7], evaluándose la confiabilidad de los ajustes realizados. Palabras-Clave— Protecciones adaptivas, Coordinación de protecciones, Relevadores de distancia, Protección de líneas de transmisión, Métodos de búsqueda. L I. INTRODUCCIÓN AS líneas de transmisión son los elementos del sistema eléctrico de potencia que se encuentran expuestos con mayor frecuencia a fallas y generalmente están protegidas por relevadores de distancia. La probabilidad de ocurrencia de fallas en las líneas de transmisión es elevada y si estas no son liberadas en un tiempo corto pueden causar daños importantes al sistema de potencia [1]. La protección de distancia en los sistemas de transmisión tiene como función básica detectar fallas que se presentan en líneas o subestaciones y aislarlas. Este sistema cuenta con una protección primaria cuya operación debe ser de alta velocidad y es la que trata de aislar rápidamente la mínima sección de la red ante una falla. Las protecciones de respaldo son de velocidad más lenta y operan solo si la protección primaria no opera. Este trabajo presenta la aplicación de un método para calcular el ajuste de la Zona 3 A.A. Chávez (e-mail: [email protected]) es estudiante de Posgrado en el Instituto Tecnológico de Morelia, Av. Tecnológico 1500 Col. Lomas de Santiaguito, CP 58120, Morelia Michoacán, México. J.L. Guardado (e-mail: [email protected]) y E. Melgoza (e-mail: [email protected]) laboran en el Instituto Tecnológico de Morelia. D. Sebastián ([email protected] ) labora en el Instituto Politécnico Nacional, Unidad Adolfo López Mateos, Col. Lindavista, CP 07738, México, DF. (Z3) de relevadores de distancia a partir de una metodología presentada por D. Sebastián [2], [6] para la Zona 2 (Z2), el cual se puede hacer extensivo a zonas adicionales de protección de los relevadores modernos. El desarrollo de relevadores microprocesados con capacidades de comunicación ha facilitado la implantación de sistemas de protección adaptivos. En estos sistemas los ajustes de los relevadores se realizan automáticamente, de acuerdo a las condiciones que prevalecen en el sistema, y por lo tanto, el ajuste de la Z2, Z3 o alguna otra se realiza automáticamente a fin de proteger el porcentaje más alto de las líneas remotas. El método propuesto y su versión adaptiva se aplicaron a un sistema de potencia, presentándose los resultados obtenidos. II. CRITERIOS DE AJUSTE DE RELEVADORES DE DISTANCIA Las características de operación de los relevadores de distancia se basan en la relación voltaje/corriente, y operan cuando esta relación es menor a un valor predefinido en la dirección vista por el relevador [2]. Normalmente se utiliza un método de protección de distancia basado en tres zonas, es decir, se emplean varios relevadores de distancia en forma tal que el sistema queda dividido en tres zonas, con tiempos de disparo diferentes para cada uno de ellos. Para la zona 1 (Z1), el disparo es instantáneo y el alcance se puede ajustar hasta un 95% de la sección a proteger [3]. La protección de la Z2, cubre el porcentaje restante de la sección protegida, más 25-40% de la sección siguiente. La Z3 tiene como función brindar una protección de respaldo a líneas remotas en un 100%; es decir, el alcance cubre hasta dos nodos de distancia de donde se ubica el relevador. Las Z2 y Z3 no deben presentar problemas de coordinación, por lo que normalmente se analizan diversos escenarios seleccionándose el que se considera más adecuado para el sistema a proteger. Así, la Z2 proporciona protección de respaldo para el relevador de la siguiente sección, en el caso de fallas próximas a la barra. El retardo de tiempo de esta zona es normalmente de 0,3 seg. La Z3, con un retardo de tiempo hasta de 0,6 seg., proporciona una protección completa de respaldo para cualquier falla en todas las secciones del alimentador a proteger y el adyacente. En esquemas de protección adaptiva, la evaluación de la seguridad y dependabilidad se realizan continuamente de acuerdo a la condición de operación presente en el sistema. De 52 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 1, MARCH 2008 esta manera se identifican los relevadores que requieren modificar sus valores. Este trabajo presenta un modelo computacional para el ajuste automático de las Z2 y Z3 durante cambios en la topología del sistema debido a eventos en el mismo. Los vectores m y n determinan los interruptores incidentes a cualquier nodo. El vector p ayuda a visitar, desde un nodo como punto de partida, cualquier otro nodo en la red. La Fig. 2 muestra el algoritmo para obtener la estructura de la lista encadenada que describe la conectividad de una red. III. COORDINACIÓN DE LA PROTECCIÓN DE DISTANCIA Inicio A. Proceso general de coordinación En la metodología propuesta, la coordinación de los relevadores de distancia requiere identificar los pares de relevadores primario-respaldo a fin de determinar los diferentes ajustes de las zonas de protección [4], [5]. En la Fig. 1 se presenta el esquema general para el ajuste automático de las diferentes zonas de protección. Toma el primer nodo Toma el interruptor de la primer línea incidente al nodo y lo almacena en m El nodo del extremo opuesto de la Línea se almacena en p El interruptor de la siguiente línea se almacena en n Hay otra línea que incide al nodo SÍ NO El vector n asume un valor igual a cero Inicio Toma el siguiente nodo Representación de la topología del sistema NO Se han considerado todos los nodos Pares de relevadores primario-respaldo Fig. 2. Lista encadenada que describe la conectividad de la red Ajuste de la Z1 de protección Estudio de cc para el ajuste de las Z2 y Z3 de protección Simulación y comprobación de resultados Modificar ajustes de NO los relevadores Operación satisfactoria SÍ SÍ Fin Información de los relevadores Enviar a salida los ajustes a los relevadores Fin Fig. 1. Metodología para ajustar los relevadores de distancia C. Matriz de incidencia relevador nodo La matriz de incidencia relevador nodo se obtiene empleando la información de la lista encadenada de los datos del sistema, y permite hacer un recorrido a través de los diferentes nodos. Este algoritmo emplea vectores que contienen apuntadores que permiten identificar los relevadores asociados a ambos extremos de las líneas que inciden a cada nodo. Los siguientes vectores se utilizan para almacenar la matriz de incidencia relevador nodo, ver Fig. 3. B. Estructura de datos La topología del sistema se representa en un algoritmo por medio de listas encadenadas [5], cuyo origen se basa en Teoría de Grafos. Los vectores donde se almacena la información emplean apuntadores que se utilizan para describir la conectividad del sistema. Es importante señalar que a cada relevador le corresponde un interruptor. Los componentes más importantes de las listas encadenadas son: 1) Lista de nodos: Se utiliza un vector m para iniciar la lista de relevadores incidentes a un nodo. Para un nodo dado, el elemento en este vector m (nodo) es el primer interruptor incidente a este nodo. 2) Interruptores de enlace: Se utiliza un vector n para enlazar los interruptores incidentes a un nodo dado. Para cualquier interruptor, el elemento en el vector n (interruptor) es el siguiente interruptor incidente en el mismo nodo. 3) Nodo remoto: Se utiliza un vector p para enlazar los interruptores incidentes a un nodo dado. Para cualquier interruptor dado, el elemento del vector p (interruptor) es el nodo remoto en el extremo opuesto de la línea donde se localiza el interruptor. Inicio Toma el primer nodo Determina el primer relevador que incide en el nodo. Almacena en NN el número del nodo RL almacena el relevador y RN asume un +1 Determina el relevador colocado en el otro extremo de la línea La siguiente localidad de RL almacena el número de relevador en la misma, el vector RN asume un -1 Determina el siguiente relevador SÍ Existe otro relevador adyacente al nodo Toma el siguiente nodo NO Se han considerado todos los nodos SÍ Fin Fig. 3. Diagrama que determina la matriz de incidencia relevador nodo 1) Vector que contiene apuntadores que indican el número de nodo (NN). 2) Vector con la lista de relevadores que protegen a la línea (RL). CHAVEZ et al.: DISTANCE PROTECTION COORDINATION 53 3) Vector que contiene apuntadores que identifican si el relevador en un vector RL incide al nodo (RN). 4) Vector que indica si el relevador se localiza en el punto incidente en el extremo opuesto de la línea. 5) Vector que contiene apuntadores que permiten enlazar todas las líneas que inciden a un nodo (EN). D. Pares de relevadores primario-respaldo La obtención de los pares de relevadores primario-respaldo se realiza considerando cualquier relevador del sistema como relevador de respaldo e identificando la línea que protege Posteriormente se identifica el relevador colocado en el otro extremo de la línea, es decir, en el nodo remoto; el resto de los relevadores que inciden al nodo remoto son los relevadores considerados relevadores primarios para el relevador que se analiza. Cada par de relevadores se forma considerando el relevador de respaldo y uno de los relevadores primarios, ver Fig. 4. Inicio Toma un relevador del sistema, lo considera como relevador de respaldo [RR] Selecciona los relevadores que corresponden a los RN = -1 de RENL, y elimina el relevador colocado en la línea donde se localiza el relevador RR, el resto son los relevadores primarios Forma el par de relevadores (primario-respaldo) NO SÍ Se consideraron todos los relevadores Se consideraron todos los relevadores SÍ Fin NO Impedancia de ajuste para la Z 1 . Rr Relevador de respaldo que se va a ajustar. Z a ( Rr , B ) Z aparente vista por Rr con una falla en el nodo B. Z a ( Rr , C ) Z aparente vista por Rr con una falla en el nodo C. K1 Factor de seguridad, definido en 0,90 A C Rr B Fig. 5. Relevador de distancia Rr protegiendo una línea con tres terminales V. AJUSTE DE LA ZONA 2 DE PROTECCION A. Método convencional Típicamente, la protección de la Z2 cubre el porcentaje restante de la sección protegida, más 40-50% de la sección de línea siguiente. Considerando el sistema de la Fig. 6, la impedancia de ajuste de la Z2 del relevador RAB utilizando métodos convencionales esta dada por: Z 2 ( R AB ) = Z AB + 1 * Minima[ Z B − Ci ] 2 Determina en la matriz de incidencia relevador nodo el renglón; RL = RR y RN = -1 [RENL] Considera el siguiente relevador donde: Z 1 ( Rr ) Toma el siguiente relevador primario donde: Z 2 ( R AB ) Impedancia de ajuste para Z 2 del relevador RAB Z AB Impedancia de secuencia (+) de la línea protegida AB Z B − Ci i Impedancia de secuencia (+) para la línea remota B-Ci 1, 2,…k; k es el numero de relevadores primarios. A RAB ZAB B RB-C1 RB-C2 Fig. 4. Determinación de los pares de relevadores primario-respaldo RB-Ci IV. AJUSTE DE LA ZONA 1 DE PROTECCION El alcance de la Z1 de los relevadores cubre hasta en un 95% la impedancia de la línea protegida [3]. En el presente trabajo el ajuste se define para cubrir un 90% de la línea donde se ubica el relevador, ver Fig. 5. Normalmente no se tienen problemas de alcance en esta zona cuando las líneas carecen de aportaciones de corriente intermedia, ecuación (1). En el caso de líneas con aportaciones de corriente intermedia (líneas con tres terminales), se selecciona la menor impedancia aparente calculada ante fallas nodales simuladas en los dos extremos restantes, ajustándose a un 85-95% de la impedancia seleccionada, ecuación (2). Z 1 ( Rr ) = K 1 * Z a ( Rr , C ) (1) Z 1 ( Rr ) = K 1 * min[ Z a ( R r , B ), Z a ( Rr , C )] (2) (3) ZB-C1 C1 ZB-C2 C2 ZB-Ci Ci Fig. 6. Relevador de respaldo y los puntos Ci donde se simulan las fallas El criterio de ajuste anterior se aplica a la Fig. 7 para determinar el ajuste de la Z2 de R3. Las impedancias de secuencia positiva están dadas en p.u. La línea con el valor de impedancia menor además de la línea protegida es la línea del bus 3 al bus 4. Sustituyendo estos valores en (3) se obtiene el siguiente ajuste para la Z2 de protección de R3: Z2 (R3) = (0.0072 + j0.404) + 1/2 [0.0011 + j0.007] Z2 (R3) = 0.0414∠79.9° 54 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 1, MARCH 2008 2 7 3 0.01460 + j0.07200 0.00720 + j.04040 R4 R3 R12 R11 R5 4 R11 0.00110 + j0.00700 Fig. 7. Parte de un sistema eléctrico utilizado como ejemplo B. Método propuesto Este ajuste para la Z2 se determina simulando fallas en el extremo remoto de las segundas líneas, con la finalidad de representar la configuración del sistema cuando se presente una falla. Posteriormente, se revisa el alcance de esta zona bajo una condición de falla en el límite del alcance de la Z1 de los relevadores primarios. Si existen relevadores de respaldo que operan en Z2, entonces se reduce el alcance de esta zona y se determina un nuevo ajuste simulando fallas [6]. El alcance del ajuste de Z2 del relevador de respaldo debe tener un alcance menor a la Z1 de los relevadores primarios. Finalmente, se verifica que este ajuste proteja cuando menos 1.2 veces la impedancia de limite protegida para garantizar que una falla en su nodo remoto sea vista por el relevador en la Z2. Los pasos que describen el algoritmo de ajuste y coordinación se presentan en la Fig. 8 y son: A Rr ZAB B RP1 RP2 RPi ZB-C1 F1 C1 ZB-C2 F2 ZB-Ci Fi Z 2 ( R r , R pi ) = Z AB + K 2 * ( Z a ( R r , C i ) − Z AB ) Ci 1) Calcular la impedancia aparente vista por el relevador mediante la ecuación (4) evaluada para cada uno de sus relevadores primarios. El efecto de fuente intermedia esta implícito en el segundo termino de la ecuación (4). (4) (5) donde: Z 2 ( R r , R pi ) Z a ( Rr , C i ) Impedancia de ajuste de la Z2 del Rr para evitar sobre-alcances en las zonas de los Rpi. Impedancia aparente vista por Rr ante una falla en el nodo remoto del Rpi. 6) Seleccionar el menor Z a ( R r , R pi ) calculado en el paso 5 como el nuevo ajuste de la Z2 para relevadores con problemas de coordinación. 7) Repetir el proceso a partir del paso 5 para todos los relevadores con problemas de coordinación. El método se aplica al sistema de la Fig. 7. La Tabla I muestra los posibles ajustes de la Z2 en R3 cuando ocurre una falla. Como se observa, el menor valor obtenido para el ajuste de Z2 esta en la línea N3–N4 (0.0669 ∠ 80.5), el cual es el valor de ajuste para la Z2 de R3. C2 Fig. 8. Relevador de respaldo y los puntos Fi donde se simulan las fallas Z 2 ( R r , R pi ) = Z AB + K 2 * ( Z A ( R r , Fi ) − Z AB ) obtener la impedancia de ajuste de todos los relevadores. 4) Evaluar el alcance de la Z2 de cada uno de los relevadores, simulando fallas en el límite del alcance de la Z1 de sus respectivos relevadores primarios, y así, identificar relevadores de respaldo con posibles problemas de coordinación de Z2 con sus relevadores primarios Rpi. 5) Calcular la impedancia aparente vista por relevadores con problemas de coordinación, evaluando la ecuación (5). TABLA I AJUSTES DE LA ZONA 2 DEL RELEVADOR 3 Relevador R3 R3 Línea N3 – N4 N3 – N7 Impedancia de ajuste 0.0669∠80.5 0.258∠77.6 Finalmente, se concluye que el valor de ajuste de la Z2 para el R3 obtenido por el método tradicional es más pequeño en relación al obtenido por el nuevo método, Tabla II. El valor obtenido por el método propuesto no causa ningún problema de coordinación. TABLA II COMPARACIÓN DE AJUSTES DE LA Z2 DE R3 POR LOS DOS METODOS donde: R pi Relevador primario i, respaldado por Rr. Rr Relevador de respaldo a ajustar en Z2. Z 2 ( R r , R pi ) Impedancia de ajuste de la Z2 de Rr Z AB K2 Impedancia de secuencia positiva de la línea AB 0,90* K 1 Z A ( R r , Fi ) Z aparente vista por Rr ante una falla en Fi. 2) La menor Z 2 ( R r , R pi ) calculada en el paso 1 es la impedancia de ajuste de la Z2 del relevador de distancia. 3) En el sistema de potencia el proceso se repite hasta Relevador R3 R3 Método Tradicional Propuesto VI. AJUSTE DE LA ZONA 3 DE Impedancia de ajuste 0.0414∠79.9° 0.0669∠80.5° PROTECCION La metodología descrita se extendió a la Z3 del relevador de respaldo. Para definir el ajuste de Z3, se debe establecer un equilibrio entre la dependabilidad y seguridad con que debe operar el relevador para disminuir el número de operaciones indeseables [8]. Este ajuste se obtiene, si inicialmente se define el ajuste de la Z3 para proteger como respaldo el 100% CHAVEZ et al.: DISTANCE PROTECTION COORDINATION 55 de la longitud de todas las líneas remotas, con lo cual se satisface el aspecto de dependabilidad. Con estos ajustes, se verifica el comportamiento de los relevadores ante fallas nodales en todo el sistema y se obtiene la relación de los relevadores que operan ante fallas a más de dos nodos considerando la operación de estos relevadores con una operación no segura. Como se pretende reducir el número de operaciones indeseables del relevador para esta zona, se considera como primera opción no cubrir el 100% de las líneas con lo cual se reduce el número de relevadores que tiene una operación no deseada. La manera más adecuada de relacionar cuantitativamente la dependabilidad y seguridad es ordenar en forma descendente la magnitud de la impedancia de falla medida por los relevadores que realizaron una operación no segura (A*) y en forma ascendente la magnitud de falla medida por los relevadores en sus segundos nodos remotos (B*). El ajuste de la Z3 que cubre el 100% de las líneas remotas se define como 1.05 veces la mayor (B*). El cambio de ajuste se realiza si se verifica que disminuye el número de fallas del relevador. A continuación se describe el algoritmo de ajuste de la Z3: 1) Calcular la impedancia de falla que mide un relevador ante fallas simuladas en el nodo remoto de sus relevadores primarios, evaluando la ecuación (6). El efecto de fuentes intermedias esta implícito en el segundo termino de (6). Si M = 1 y N ≥ 1 , no se modifica el ajuste de la Z3 Si M > 1 y N ≤ 1 entonces Z 3 ( R r ) = A ( M ) B (1) Si M − ( M − k ) > J y A ( k ) > B ( N − J ) , Z 3 ( R r ) = B ( N − J ) 9) Repetir el paso 5 para cada relevador con sobre-alcances. 10) Finalizar el proceso de ajuste El método para los pasos 1-3 se aplico al sistema de la Fig. 9. La Tabla III muestra los posibles ajustes de la Z3 en R3 cuando ocurre una falla. Como se observa en la Tabla III, el menor valor obtenido para el ajuste de Z3 esta en la línea N3– N4 y es el valor propuesto. 1 0.03379 + j0.20300 R1 R2 7 3 0.01460 + j0.07200 0.00720 + j.04040 R3 R4 R12 R11 R5 2 4 R6 0.00110 + j0.00700 Fig. 9. Parte de un Sistema Eléctrico utilizado como ejemplo TABLA III AJUSTES DE LA ZONA 3 DEL RELEVADOR 1 Relevador R1 R1 Línea final de falla N3 – N4 N3 – N7 Impedancia de ajuste 0.417∠63.51 0.712∠63.42 VII. ÁREA DE APLICACION Z 3 ( R r , R pi ) = Z AB + ( Z a ( R r , C i ) − Z AB ) (6) Z 3 ( R r ) = K 3 * max[ Z a ( R r , R pi ] (7) donde: Z 3 ( Rr ) Impedancia de ajuste de la Z3 del relevador Rr. K3 Factor de seguridad definido en 1.05 Es importante mencionar que el resto de los términos de las ecuaciones anteriormente desarrolladas se definen igual que las anteriormente descritas. 2) Definir la impedancia de ajuste de la Z3 mediante (7). 3) Repetir los pasos 1 y 2 para todos los relevadores. Cuando se finalice este proceso se termina el ajuste de la Z3. 4) Simular fallas en todos los nodos del sistema, e identificar a los relevadores que tienen problemas de coordinación por sobre-alcances. 5) Contar el número de operaciones no seguras [M] realizadas por el relevador i, así como el número de relevadores primarios de dicho relevador [N]. 6) Ordenar de mayor a menor la magnitud de la impedancia aparente (A*) medida por el relevador i candidato, para fallas nodales mas allá de dos nodos del relevador i. 7) Ordenar de menor a mayor la magnitud de la impedancia aparente (B*) medida por el relevador i candidato, para fallas en el nodo remoto de sus relevadores primarios. 8) Desarrollar la siguiente metodología: La incorporación de relevadores multifuncionales en la protección de líneas de transmisión ha representado una gran ventaja. Sin embargo, cuando existen limitaciones en los canales de comunicación, los ajustes ya se encuentran programados en grupos, y un solo bit de información hace posible el cambio de ajustes. El inconveniente es que los ajustes son previamente calculados y pueden no ser adecuados para la condición de operación del sistema sobre todo en sistemas bastante interconectados. Un sistema de protección adaptiva facilita el uso de relevadores multifuncionales porque puede disponer de algoritmos para obtener y mantener la coordinación de relevadores de distancia ante diversas condiciones de operación del sistema. El sistema de protección adaptiva de un sistema eléctrico de potencia requiere de distintos niveles jerárquicos para una operación óptima [9], [10], [11]. Un sistema de protección se estructura jerárquicamente considerando la función y el tiempo de operación de cada uno de los elementos que conforman al sistema de protección, esto con el fin de proporcionar confiabilidad en la operación de los esquemas de protección. La descomposición jerarquiza de un sistema de protección adaptiva se considera en tres niveles que son el centro de control de protecciones, el centro de control de subestaciones y los dispositivos electrónicos inteligentes. La metodología desarrollada en este trabajo se puede utilizar en la Fig. 10 como una coordinación automática en el Centro de Control de Protecciones. 56 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 1, MARCH 2008 Para el desarrollo del programa de coordinación automática de protecciones se requiere de herramientas de software que permitan reconocer la configuración del sistema, así como los cambios de estado de equipos eléctricos e interruptores. Asimismo se requieren herramientas computacionales para efectuar estudios de cortocircuito y coordinación de protecciones. A continuación se mencionan las herramientas desarrolladas en este trabajo. • Evaluación de la topología de la red • Cortocircuito • Conjunto de pares de relevadores primario-respaldo • Ajuste y coordinación de relevadores • Evaluación de los ajustes y coordinación propuestos • Modelado de las características de los relevadores 10 1 R3 R1 3 9 R6 R33 R4 R5 R12 R11 R14 R13 R34 R7 R17 2 R15 4 R18 12 R32 8 R26 6 R2 R30 R29 R31 R25 R27 R28 R35 R23 hombre-máquina PC DE CONTROL SUBESTACION 1 PC DE CONTROL SUBESTACION 2 ... R20 R19 R22 R21 Protección Reporte de alarmas Centro local TABLA IV AJUSTES DE LA ZONA 2 DEL RELEVADOR PC DE CONTROL SUBESTACION k Estudio de corto circuito para el ajuste de las Z2 y Z3 de protección Fig. 10. Jerarquizacion de un sistema de protección adaptiva VIII. CASO DE ESTUDIO Los algoritmos para determinar los ajustes adaptivos en la Z2 y Z3 se han aplicado a un sistema de 14 nodos [7], Fig. 11. Los resultados del ajuste adaptivos de la Z2 y Z3 se muestran en las Tablas IV y V. La Tabla VI muestra la Zona de operación de cada relevador de acuerdo al nodo de falla en el sistema de la Fig. 11 [12]. Es importante señalar que el programa verifica la dependabilidad y seguridad, esto con el fin de que los problemas de coordinación por sobre-alcances que puedan ocurrir en un primer ajuste sean corregidos por el software desarrollado. Finalmente, la Tabla VII muestra el reajuste para aquellos relevadores que muestran problemas de coordinación por sobre-alcance, y donde se aplicó el algoritmo correspondiente. Obsérvese que al simular de nuevo fallas nodales, R28 ya no opera con fallas en el nodo 2 debido al ajuste para evitar sobre-alcances. IX. CONCLUSIONES Se han desarrollado algoritmos y metodologías para el ajuste de la Z2 y Z3 de protección de distancia, las cuales se basan en métodos de búsqueda y criterios de ajuste predeterminados que se pueden modificar y extender a otras zonas de protección. 5 Fig. 11. Caso de Estudio hombre-máquina Supervisión R10 13 Interfaz Relevador Respaldo Medición R24 R36 14 CENTRO DE CONTROL DE PROTECCIONES R9 11 7 Interfaz R16 R8 R1 R2 R3 R4 R7 R8 R9 R10 R11 R12 R13 R14 R17 R18 R19 R20 R21 R22 R25 R26 R27 R28 R31 R32 R33 R34 R35 R36 Relevadores Primarios R27 R3 R33 R1 R32 R5 R19 R11 R14 R9 R12 R9 R26 R15 R22 R10 R20 R10 R18 R23 R35 R2 R8 R29 R12 R4 R20 R28 R21 R13 R34 R13 R34 R11 R36 R21 R36 R19 R14 R22 Impedancia de Ajuste 0.715∠64.4 4.902∠59.6 0.288∠71.4 5.983∠55.2 0.940∠50.2 0.615∠ 55.3 1.972∠56.7 1.859∠55.8 0.211∠71.4 0.270∠71.33 0.211∠71.39 0.270∠71.33 0.940∠50.19 0.614∠ 55.48 0.211∠71.39 0.211∠71.39 0.211∠71.39 0.211∠71.39 0.940∠50.19 0.614∠ 55.48 0.287∠71.41 0.782∠57.52 0.940∠50.19 0.614∠ 55.48 0.181∠71.33 0.198∠71.41 0.181∠71.33 0.198∠71.41 CHAVEZ et al.: DISTANCE PROTECTION COORDINATION TABLA V AJUSTES DE LA ZONA 3 DEL RELEVADOR Relevador Respaldo R1 R2 R3 R4 R7 R8 R9 R10 R11 R12 R13 R14 R17 R18 R19 R20 R21 R22 R25 R26 R27 R28 R31 R32 R33 R34 R35 R36 Nodo 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Relevadores Primarios R35 R33 R12 R27 R29 R27 R20 R12 R4 R19 R4 R19 R23 R9 R10 R11 R10 R11 R15 R10 R20 R3 R5 R2 R9 R1 R10 R2 R14 R33 R22 R14 R9 R21 R9 R21 R36 R34 R34 R34 R11 R28 R13 R21 R13 R13 R19 R22 R21 R36 R28 R36 R27 R11 R13 R21 R19 Impedancia de Ajuste 1.042∠63.5 2.005∠48.8 0.361 ∠71.4 7.377∠49.5 1.008∠53.4 0.616∠55.3 2.159∠77.54 2.310∠77.14 0.362∠71.4 20.556∠39.48 0.362∠71.4 20.556∠39.48 1.011∠53.3 0.618∠55.3 0.362∠71.4 20.556∠39.48 0.362∠71.4 20.556∠39.48 1.011∠53.3 0.618∠55.3 0.362∠71.4 4.625∠46.6 1.011∠53.3 0.618∠55.3 4.141∠72.71 4.052∠71.56 4.647∠73.73 0.817∠77.5 TABLA VI RELEVADORES QUE OPERAN ANTE UNA FALLA NODAL Relevadores que operan en Z2 Relevadores que operan en Z3 R2, R4 R8, R10, R12, R14 R18 R9, R20, R22 R26 R1, R28 R32 R3, R34 R11, R13, R33 R7, R31 R17, R25 R27, R36 R19, R21, R35 R28, R34 R2, R4, R28, R31 R20, R22, R33 R12, R14, R20, R22, R25 R12, R14, R35 R12, R14, R17, R20, R22 R4, R36 R1, R7, R28 R2, R11, R13, R3, R10 R28 R12, R14, R20, R22 R1, R19, R21 R9, R27 57 TABLA VII EVALUACIÓN DE RELEVADORES CON PROBLEMAS DE SOBRE-ALCANCE Relevadores que operan en la Z2 Relevadores que operan en Nodo sin sobre-alcances la Z3 sin sobre-alcances 1 2 3 4 5 6 7 8 9 10 11 12 13 14 R2, R4 R8, R10, R12, R14 R18 R9, R20, R22 R26 R1, R28 R32 R3, R34 R11, R13, R33 R7, R31 R17, R25 R27, R36 R19, R21, R35 R28, R34 R2, R4, R31 R20, R22, R33 R12, R14, R20, R22, R25 R12, R14, R35 R17, R20, R22 R4, R36 R1, R7, R28 R2, R11, R13, R3, R10 R28 R12, R14, R20, R22 R1, R19, R21 R9, R27 Se considera que los resultados de utilizar estas técnicas para el cálculo del ajuste de relevadores de distancia proporcionan una mayor amplitud y cobertura en las diferentes zonas de protección incluyendo sistemas bastante interconectados. Con los criterios utilizados se reducen los problemas de coordinación por sobre-alcances en los relevadores del sistema de potencia, y si llegara a presentarse esta condición, el programa realiza de manera dinámica la corrección para esta condición no deseable. La aplicación correcta de estos ajustes se verifica mediante la simulación de fallas en distintos nodos del sistema, para comprobar los alcances de las Z2 y Z3 de los relevadores, los cuales proporcionan una protección más amplia que la utilizada con los métodos convencionales. La evaluación de ajustes de la Z3 indica que si el alcance se verifica para las mismas condiciones de operación del sistema con las cuales se calcularon los ajustes de esta zona, se tiene un menor número de fallas indeseables en la operación de los relevadores. La metodología presentada para las Protecciones de Distancia puede extenderse a esquemas de protección por sobre-corriente y/o de otro tipo. A futuro, se pretende desarrollar los algoritmos correspondientes y analizar el esquema de protecciones de una manera más integral. Cabe mencionar que actualmente el método de búsqueda es off-line, pero también se puede extender su alcance para trabajar on-line. Como trabajos futuros se pretende también incorporar redes neurales y/o lógica difusa para reducir la incertidumbre derivada de la falta de información sobre el status de un interruptor y/o sección de línea lo cual puede conducir a ajustes incorrectos en las protecciones. AGRADECIMIENTOS Los autores expresan su reconocimiento a la Dirección General de Educación Superior Tecnológica (DGEST), y al Consejo Nacional de Ciencia y Tecnología (CONACYT) por el apoyo económico brindado para realizar estos estudios. 58 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 1, MARCH 2008 REFERENCIAS [1] D. Sebastián, “Coordinación y Ajuste de Relevadores de Distancia Utilizando Protecciones Adaptivas”, Tesis de Maestría, ITM, 1993, Asesor: Dr. Ricardo Mota Palomino. [2] D. Sebastián, “Protección Adaptable de Sistemas de Transmisión: Ajuste y Coordinación de Relevadores Mediante Sistemas Expertos”, Tesis de Doctorado, Instituto Politécnico Nacional, Nov. 1999, Asesor: Dr. Ricardo Mota Palomino. [3] Y. Xia, K. Li and A. David, “Adaptive Relay Setting for Stand-alone Digital Distance Protection”, IEEE Transactions on Power Delivery, Vol. 9, No. 1, Jan. 1994, pp. 480-491. [4] M. Damborg, R. Ramaswami, S. Venkata and J. Postforoosh, “Computer Aided Transmission Protection System Design, Part I: Algorithms”, IEEE Transactions on Power Apparatus and Systems, Vol. 103, No. 1, Jan. 1984. [5] M. Damborg and S. Venkata, “Specification of Computer Aided Design Transmission Protection System”, Final report EL-3337, Jan. 1984. [6] S. Tarlochan and D. Sebastian, “A New Approach for Calculating Zone2 Setting of Distance Relay and Use in an Adaptive Protection System”, IEEE Transactions on Power Delivery, Vol. 19, No. 1, Jan. 2004. [7] P. M. Anderson, Analysis of Faulted Power Systems, IEEE Press Power Systems Engineering Series, 1995. [8] B. Stedall, P. Moore, A. Johns, J. Goody, and M. Burt, “An Investigation Into the Use of Adaptive Setting Techniques for Improved Distance Back-up Protection”, IEEE Transactions on Power Delivery, Vol. 11, No. 2, Apr.1996, pp. 757-762. [9] M. S. Sachdev, T.S. Sidhu, B. Chattopadhyay, B. Talukdar, G. McDonal and R. Chan “Design and Evaluation of an Adaptive Protection System for a Distribution Network”, CIGRE Study Committee 34 Colloquium, Stockholm, Sweden, Jun. 11-18, 1995. [10] P. J. Moore, B. Stellan, A.T. Johns and J. Goody, “Hierarchical Protection of Transmission Systems, CIGRE Study Committee 34 Colloquium, Stockholm, Sweden, Jun. 11-18, 1995. [11] J. Booth and K. Hemza, “Coordination Control and Protection: Functionality Enhancements via Information Technology” IEE Conference 368 Developments in Power Systems Protection, The University of York, UK, Apr. 1993. [12] A. A. Chávez “Protección Adaptiva de Sistemas Eléctricos de Potencia”, Tesina de Examen Predoctoral, ITM 2004 [13] J. A. A. Camarena “Evaluation of Protection Algorithms: Simulation of Open Loop in ATP”, IEEE Latin America Transactions, Vol. 4, No. 1, Mar.2006. Arnulfo Arón Chávez Mújica, se graduó de Ingeniero Eléctrico en el Instituto Tecnológico de Morelia, México en 1999. Realizo estudios de Maestría (2002) y Doctorado en la misma institución. Actualmente labora en el Centro Nacional de Control de Energía de la Comisión Federal de Electricidad, México. José Leonardo Guardado Zavala, se graduó de Ingeniero Electricista en la Universidad de Michoacán, México en 1982. Ingresó al Instituto de Investigaciones Eléctricas en 1983, trabajando en líneas de transmisión, equipo eléctrico y transitorios electromagnéticos. Realizó estudios de Maestría (1986) y Doctorado (1990) en UMIST, Manchester Inglaterra. Miembro del Sistema Nacional de Investigadores (SNI) desde 1990. Actualmente es profesor–investigador en el Instituto Tecnológico de Morelia, México. David Sebastián Baltazar, se graduó de Ingeniero Electricista en el Instituto Tecnológico de Morelia, México en 1991. Realizó estudios de Maestría y Doctorado en el IPN, en 1994 y 1999. Desde 1999 es profesor en el Instituto Politécnico Nacionales la Escuela Superior de Ingeniería Mecánica y Eléctrica, México. Enrique Melgoza Vázquez, se graduó de Ingeniero Eléctrico en el Instituto Tecnológico de Morelia, México en 1990. Realizó estudios de Maestría en la misma institución (1995). Realizó también estudios de Doctorado la Universidad de Bath, Reino Unido (2001). Miembro del Sistema Nacional de Investigadores (SNI). Actualmente es profesor-investigador en el Instituto Tecnológico de Morelia, México.