Slides/Presentación - Facultad de Informática
Anuncio

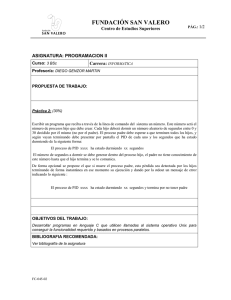
SISTEMAS INTELIGENTES EN OPTIMIZACIÓN Y CONTROL APLICACIONES PRÁCTICAS José Luis Calvo Rolle Dpto. Arquitectura de Computadores y Automática – Facultad de Informática Universidad Complutense de Madrid – Junio 2013 SISTEMAS INTELIGENTES EN OPTIMIZACIÓN Y CONTROL - APLICACIONES PRÁCTICAS Método basado en bioconocimiento para prevenir inestabilidades Modelado de sistema solar térmico en vivienda bioclimática Sistema Inteligente Adaptativo-Predictivo para control de sistemas Modelado conceptual para un regulador PID Universidad Complutense de Madrid, 2013 Sistemas inteligentes en optimización y control Aplicaciones prácticas José Luis Calvo Rolle Dpto. Arquitectura de Computadores y Automática MÉTODO É BASADO EN BIOCONOCIMIENTO PARA PREVENIR INESTABILIDADES A BIO KNOWLEDGE BASED A BIO‐KNOWLEDGE BASED METHOD TO PREVENT CONTROL SYSTEM INSTABILITY Resumen Esta investigación presenta un método bioinspirado, basado en Gain Scheduling, para el cálculo de los parámetros de un controlador PID. PID El objetivo es prevenir que el sistema pase a ser inestable debido a una introducción erronea de parámetros por parte del controlador. Para cada punto de operación significativo el sistema es identificado. id tifi d A continuación ti ió se obtiene bti ell volumen l de estabilidad para cada función de transferencia para obtener el sistema bioinspirado p basado en ANN. El método ha sido testeado en una planta de laboratorio de control de nivel. Topología de controlador Bio‐inspirado p PID Topology t de(t ) 1 u (t ) K e(t ) e(t ) dt Td Ti 0 dt Gain Scheduling Propuesta sugerida Solid structure of stability El caso de estudio u ((tt ) Kv qi (t ) Gr SP(t ) n(t ) Kb h(t ) qo (t ) A Identificación de la planta Transfer function range AR ARX ARMAX Fit(%) FPE Fit(%) FPE Fit(%) FPE 0% - 10% 52.1 > 10e-6 70.1 < 10e-6 65.3 < 10e-6 10% - 20% 55.3 > 10e-6 73.2 < 10e-6 69.0 < 10e-6 20% - 30% 56.0 > 10e-6 75.6 < 10e-6 72.1 < 10e-6 30% - 40% 55.1 > 10e-6 75.8 < 10e-6 75.5 < 10e-6 40% - 50% 56.8 > 10e-6 76.2 < 10e-6 75.8 < 10e-6 50% - 60% 56.0 > 10e-6 78.1 < 10e-6 76.1 < 10e-6 60% - 70% 54.1 > 10e-6 78.0 < 10e-6 76.5 < 10e-6 70% - 80% 56.1 > 10e-6 78.2 < 10e-6 76.0 < 10e-6 80% - 90% 56.2 > 10e-6 78.8 < 10e-6 75.7 < 10e-6 90% - 100% 55.8 > 10e-6 72.4 < 10e-6 72.3 < 10e-6 Identificación de la planta ANN range linear logsig tansig Err(%) No Ne. Err(%) No Ne. Err(%) No Ne. 0% - 10% 21 7 10 7 3 7 10% - 20% 19 8 11 7 0 6 20% - 30% 25 8 13 7 0 6 30% - 40% 26 7 15 7 0 8 40% - 50% 24 8 12 8 0 7 50% - 60% 18 8 13 7 0 7 60% - 70% 26 8 11 8 0 7 70% - 80% 29 7 16 8 1 7 80% - 90% 35 7 14 8 0 8 90% - 100% 25 8 12 7 0 8 Obtención de los parámetros del controlador K = 0.6 x Kc Ti = 0.5 x Tc Td = 0.125 x Tc Ziegler Zi Zieglerl -Nichols Ni h l formulas Fine tuning PID parameters for each operating point Level K Ti Td 10% 32 3.2 22 31 3.1 20% 3.0 27 3.9 30% 2.8 30 4.3 40% 2.5 33 4.6 50% 2.1 35 4.8 60% 2.0 36 5.1 70% 1.9 39 5.2 80% 16 1.6 40 53 5.3 90% 1.1 41 5.4 Implementación del método System implemented in Simulink Neuro Robust PID Next Slide Implementación del método I Range Block internal scheme Conclusiones Es una alternativa a tener en cuenta en sistemas no lineales. No se puede considerar un control adaptativo, pero se obtienen resultados similares. El sistema es robusto ante errores del operador. operador Las especificaciones del sistema se mantienen relativamente l ti t constantes t t a lo l largo l d todo de t d ell rango de operación. SISTEMAS INTELIGENTES EN OPTIMIZACIÓN Y CONTROL - APLICACIONES PRÁCTICAS Método basado en bioconocimiento para prevenir inestabilidades Modelado de sistema solar térmico en vivienda bioclimática Sistema Inteligente Adaptativo-Predictivo para control de sistemas Modelado conceptual para un regulador PID Sistemas inteligentes en optimización y control Aplicaciones prácticas Dpto. Arquitectura de Computadores y Automática Universidad Complutense de Madrid, 2013 S ste a Inteligente Sistema te ge te Adaptativodaptat o Predictivo para control de sistemas José Luis Calvo Rolle Introducción Adaptativo No existen los sistemas lineales. Sistemas cambiantes en el tiempo. Predictivo Es bueno saber a donde va la respuesta de un sistema Ejemplo intuitivo ^ t (5) t (0) t (0) t (5) 2t (0) t (5) Otras variables q(-5) es el caudal de aire que entraba hace 5 minutos en la habitación q(0) es el caudal de aire que entra en el instante actual en la habitación La temperatura dentro de 5 minutos dependerá de la temperatura hace 5 minutos t(-5) d la de l actuall t(0), (0) del d l caudal d l hace h 5 minutos i q(-5) ( 5) y del d l caudal d l actuall q(0) (0) Si se añaden factores de peso la expresión puede quedar como: ^ t (5) a1t (0) a2t (5) b1q (0) b2 q(5) Ejemplo con variable de aire Generalización Suponiendo que el periodo de muestreo es constante k Se pueden tener en cuenta tantos estados anteriores como sea necesario Si el sistema es no lineal, de un punto de consigna al siguiente los pesos cambian Se puede editar la expresión de la previsión para un estado anterior: ^ t (k 1) a1t (k ) a2t (k 1) b1q (k ) b2 q (k 1) Diagrama de bloques de la propuesta Neuro Predictor Nonlinear single layer neural network training algorithm for incremental, nonstationary and distributed learning scenarios David Martínez-Rego, Oscar Fontenla-Romero, Amparo Alonso-Betanzos Pattern Recognition,Volume 45, Issue 12, December 2012, Pages 4536-4546 SISTEMAS INTELIGENTES EN OPTIMIZACIÓN Y CONTROL - APLICACIONES PRÁCTICAS Método basado en bioconocimiento para prevenir inestabilidades Modelado de sistema solar térmico en vivienda bioclimática Sistema Inteligente Adaptativo-Predictivo para control de sistemas Modelado conceptual para un regulador PID Modelado M d l d d de sistema i t solar l térmico en vivienda bioclimática Sistemas inteligentes en optimización y control A li i Aplicaciones prácticas á i José Luis Calvo Rolle D t A Dpto. Arquitectura it t d de C Computadores t d yA Automática t áti Universidad Complutense de Madrid, 2013 Vivienda bioclimática Instalaciones de la vivienda Descripción de la instalación térmica Generación solar térmica 3 bar SOLAR STORAGE PS1000-1 SCHUCO 2x4 SchuecoSol S S3 S1 S5 S4 S8 T S6 ºC S2 S7 6 bar MULTICHANEL FLOWMETER 601 with module 24V C T ºC WILO STRATOS 25/6 with module 0-10 V* ***WILO O ST15/4 CUØ22+HT30 1200 l/h (Qmax) V.E.50L ETILENGLICOL TANK Técnicas contrastadas en el modelado Sistema híbrido propuesto Models Cluster 1 Cluster 1 Data DATA FILTER Data Train CLUSTERING Cluster 2 .. . REGRESSION MODELS Models Cluster 2 .. . Models Cluster n Cluster n Data Test of Cluster 1 Data Test DATA CLUSTER ASIGNATION Data Test of Cluster 2 .. . Data Test of Cluster n Errors Cluster 1 MODEL TEST Errors Cluster 2 .. . Erros Cluster n Model 1 MODEL SELECTION Model 2 .. . Model n Preprocesado Datos después p del bloque q de filtrado (p (preprocesado): p ) Datos de entrenamiento Datos test Clustering Conjunto de datos de entrenamiento Malla inicial empleada en la red SOM Obtención de la malla de clustering Malla final obtenida Datos después desp és de clustering cl stering Conj nto de datos Conjunto TOTAL Month CLUSTER 1 CLUSTER 2 CLUSTER 3 Train Test Train Test Train Test Train Test January 2221 1111 1571 776 250 144 400 191 February 2205 1102 1568 769 211 104 426 229 March 2230 1115 1458 733 236 130 536 252 p April 1819 909 948 453 206 126 665 330 May 2012 1006 1107 560 268 131 637 315 June 2040 1021 1189 600 260 136 591 285 July 2000 1000 1229 613 245 116 526 271 A August t 2001 1000 1211 604 237 133 553 263 September 2880 1440 1940 971 281 144 659 325 October 1400 700 817 412 185 73 398 215 November 1384 693 905 459 189 96 290 138 December 2002 1001 1414 722 232 93 356 186 Resultados de regresión Valor real y predicho contrastado SISTEMAS INTELIGENTES EN OPTIMIZACIÓN Y CONTROL - APLICACIONES PRÁCTICAS Método basado en bioconocimiento para prevenir inestabilidades Modelado de sistema solar térmico en vivienda bioclimática Sistema Inteligente Adaptativo-Predictivo para control de sistemas Modelado conceptual para un regulador PID “MODELADO CONCEPTUAL PARA UN REGULADOR PID” PID “Conceptual Model for PID Controller Controller” ” Sistemas inteligentes en optimización y control Aplicaciones prácticas José Luis Calvo Rolle Dpto. Arquitectura de Computadores y Automática Universidad Complutense de Madrid, 2013 • Introducción • El controll PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones • Breve introducción histórica • Gran cambio en los años 60 con el empleo p de computadores p digitales. g Permite añadir prestaciones al control PID clásico. • Regulador PID clásico: Buenas características y prestaciones prestaciones. Resolución de problemas fundamentales. Requiere de compromiso entre rapidez y estabilidad estabilidad. • Existencia de muchos reguladores mal ajustados. • Necesidad de métodos de ajuste (clasificación). • Imposible desbancar métodos tradicionales pese a nuevas técnicas. Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones • Apoyo de técnicas tradicionales con sistemas inteligentes. g Artificial → Sistemas basados en conocimiento ((SBC). ) • Inteligencia Petición Planificación Base de conocimiento Solucionador de problemas Aplicaciones de Cálculo y Visualización Otras Bases de Conocimiento Respuesta Bases Específicas Posible esquema de Sistema Basado en Conocimiento. Otras interfaces con el mundo real • Se tienen las ventajas que reportan los SBC en la materia a la que se aplique. • Modelado d l d Conceptual C l del d l conocimiento. i i • Aportaciones recientes. • Introducción El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones Ley de control PID fundamental: t u (t ) C P(t ) I (t ) D(t ) C k e(t ) k i e(t )dt k d 0 Ley de control PID reducida: t u (t ) P(t ) I (t ) D(t ) k e(t ) k i e(t )dt k d 0 d e(t ) dt d e(t ) dt Diagrama de control básico en lazo cerrado: P Consigna + - Señal de error I Σ Señal de control PLANTA Respuesta D F t estándar tá d o fformato t ISA d l d PID Formato dell regulador PID: t 1 d u (t ) K e(t ) e(t )dt Td e(t ) Ti 0 dt k= K ki = K Ti kd = K.Td GC ( S ) P 1 U (S ) K 1 Td S E (S ) Ti S I D • Introducción • El control PID Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones j Son los p primeros métodos de ajuste en aparecer. Poseen las siguientes características: de p parámetros. •Obtención empírica p •Técnicas muy simples. •Optimización de una característica. •Existencia Existencia de múltiples reglas. reglas Por ejemplo Razón amortiguamiento ¼ de 1.6 P i para la l obtención bt ió de d Pasos a seguir los parámetros: •Determinación experimental de ciertas características de la respuesta del proceso. •Aplicar unas fórmulas en función de los datos obtenidos previamente. A 1.4 B B 1.2 A 1 0.8 0.6 A.- Rechazo a perturbaciones 0.4 B.- Seguimiento de consigna 0.2 0 -0.2 0 5 10 15 20 25 30 35 40 • Introducción • El control PID Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones Sintonía en cadena abierta (FOPLT) Medición de las características de respuesta p de un p proceso. Aproximación de la respuesta a: G ( S ) K e S L 1 T S T 1.5(t2 t1 ) L t2 T Aproximación de la respuesta a: G(S ) a S L e SL con a KL T • Introducción • El control PID Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones Obtención de parámetros mediante la aplicación de fórmulas: •Fórmulas de Ziegler-Nichols.- (validas en el intervalo 0.1 0.7 1.2 a Ti Td 2L 0.5L 0.5 Kp 1 .2 Ti T K L 1.6 1.4 Td 2L ) 1.8 0.6 Kp L 1 T 0.5 0.5L 0.5 2 G(S ) e 1.5 S 1 10 S 1.2 0.4 1 0.8 0.3 0.6 0.2 0.4 0.1 0.2 0 -0.1 0 0 50 100 150 -0.2 0 250 200 50 •Fórmulas de Chien, Hrones y Reswick.- (validas en el interv. 100 150 0.11 Para cambios en la carga 0% de sobreoscilación Kpp Ti 20% de sobreoscilación Td Kpp 0.42L 1.2 a Ti 1.6 1.8 1.4 1.6 250 L 1 T ) 1.4 1.2 1.2 1 Td 200 1 0.8 0.8 0.6 0.95 a 2.4L 0.6 0.4 2L 0.42L 0.4 0.2 0.2 0 -0.2 0 0 50 100 150 200 250 300 350 -0.2 450 0 400 50 100 150 200 250 300 350 400 450 50 100 150 200 250 300 350 400 450 •Fórmulas de Chien, Chien Hrones y Reswick.Reswick Para seguimiento de la consigna 0% de sobreoscilación 20% de sobreoscilación 1.2 1.4 1 1.2 1 0.8 0.8 0.6 Kp Ti Td Kp Ti Td 0.6 0.4 0.4 0.2 0 .6 a T 0.5L 0.95 a 1.4T 0.47L 0.2 0 -0.2 0 0 50 100 150 200 250 300 350 400 450 -0.2 0 • Introducción • El control PID • Ajuste empírico de reguladores Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en b base a variación ó de d parámetros • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones Benchmark Systems for PID control de Ästrom y Hägglund: gg Sistemas empleados habitualmente en el testeo de controladores PID. Los sistemas relacionados en ese artículo están basados en numerosas fuentes de importancia. La inmensa mayoría de los sistemas existentes se adaptan a alguno de los incluidos en la fuente. Diseño de reguladores PID mediante las técnicas aplicables de ajuste empírico, para los sistemas del Benchmark, realizando la clasificación: Sintonía en cadena cerrada Sintonía en cadena abierta: Seguimiento de consigna. Cambios en la carga. • Introducción • El control PID • Ajuste empírico de reguladores Cadena Abierta. Rangos de aplicación de las expresiones de obtención de los parámetros del regulador PID en función de L y T Ziegler-Nichols Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en b base a variación ó de d parámetros • Reglas del modelado conceptual de un regulador PID • Validación Kaya-Scheib Chien, Hrones y Reswick Ejemplos 0 .1 L 1 T 0 L 1 T 0.11 L 1 T 86 Step Response 4 1 09 0.9 1 G s s 1 3.5 0.8 0.6 0.5 L=0 0.4 0.3 3 1 G (s) 2 s 1 0.7 Amplitude 0.2 2.5 2 1 0.1 0 S. Inestable 1.5 0.5 0 1 2 3 4 5 6 0 Time (sec) 0 0.5 1 1.5 2 2.5 4 x 10 Step Response Step Response 10 1 9 0.9 1 G ( s) 2 s s 1 G s s 12 Acción Integral 8 7 6 5 4 3 2 0.7 0.6 0.5 0.4 0.3 0.2 1 0 0.8 Amplitude Conclusiones Amplitude • x 10 0.1 0 1 2 3 4 5 6 7 8 9 0 10 Time (sec) Todos aplicables salvo CHR 0 5 10 Time (sec) L=0.2817 T=2.7183 L 0.1036 T 15 • Introducción • El control PID A pesar de que no entra dentro del rango de aplicación se analiza para todos los casos contemplados: • Ajuste empírico de reguladores 1.5 Reglas del modelado conceptual de un regulador PID 600 0.2 ts = 5.29 800 0 1000 Mp = 15.0598 0 200 400 ts = 3.37 800 1000 Kaya & Scheib ITAE 1.4 1.4 1.2 1.2 1 1 0.8 0.8 0.6 tr = 0.57 0.6 tp = 1.17 tr = 0.59 0.4 tp = 1.21 0.4 0.2 0 600 Tiempo Kaya & Scheib ISE Validación Conclusiones 400 Mp = 9.6013 0 200 400 600 Tiempo ts = 3.1 800 0.2 1000 0 Mp = 15.1142 0 200 400 600 ts = 3.36 800 Tiempo 1000 CHIEN, HRONES Y RESWICK Mp 20% S. Consigna CHIEN, HRONES Y RESWICK Mp 0% S. Consigna 1.2 1.2 1 1 0.8 0.8 0.6 tr = 0.51 Salida • 200 tp = 1.15 0.4 0.2 Mp = 14.3124 ts = 6.93 -0.2 0.6 tr = 0.76 tp = 1.56 Mp = 7.7219 ts = 5.82 0.4 0.2 0 0 0 200 400 600 800 -0.2 1000 0 200 400 Tiempo Respuestas y valores de especificaciones del sistema regulado con CHR CHIEN, HRONES Y RESWICK Mp 0% C. Carga 800 1000 CHIEN, HRONES Y RESWICK Mp 20% C. Carga 1.5 2 1.5 1 0.5 tr = 0.45 tp = 1.24 Mp = 46.8085 ts = 5.69 0 -0.5 600 Tiempo Salida • 0 tp = 1.21 0.4 Tiempo Salida • Mp p = 46.2456 0 0.6 tr = 0.59 tp = 0.89 Salida Reglas para ajuste fino en b base a variación ó de d parámetros tr = 0.36 0.5 0.8 Salida • 1 1 Salida Volúmenes de estabilidad Respuestas y valores de especificaciones del sistema regulado con ZN y KS 1.2 Salida • Kaya & Scheib IAE 1.4 Salida Diseño de PID para sistemas del Benchmark de Ästrom Ziegler-Nichols 1 0.5 tr = 0.37 tp = 1.08 Mp = 55.342 ts = 6.18 0 0 200 400 600 Tiempo 800 1000 -0.5 0 200 400 600 Tiempo 800 1000 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación • Conclusiones Variación de especificaciones de un sistema ante modificación de parámetros, para deducción de reglas de ajuste fino. 1 S Td Gc k 1 Ti S Influencia teórica de los parámetros K, Ti y Td en las especificaciones de sistemas. EVOLUCION DE LA ESPECIFICACION ACCION REALIZADA Mp Tr Ts Margen de fase Incremento de K Aumenta Disminuye Pequeña variación Disminuye Incremento de Ti Disminuye Aumenta Disminuye Aumenta Incremento de Td Disminuye Pequeña variación Disminuye Aumenta Barridos de dos en dos K-Td y K-Ti, en otro eje la especificación. Ejemplo de sistema del Benchmark al que se realizan pruebas G(S ) 1 ( S 1) 4 • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad Variación de K y Td Estabilidad en funcion de K y Td 9 8 6 • 2 Validación • Conclusiones 40 30 5 4 • Tr La parte de imagen con el identificador de relación rId5 no se encontró en el archiv o. 7 Reglas para ajuste fino en base a variación de parámetros á Reglas del modelado conceptual de un regulador PID Mp Sobreoscilacion en funcion de K y Td Mp Introducción K • 20 10 3 0 0 3 1 2.5 2 1 2 3 0 5 10 15 20 5 Td Ts La parte de imagen con el identificador de relación rId6 no se encontró en el archiv o. 1.5 4 25 Td La parte de imagen con el identificador de relación rId7 no se encontró en el archiv o. 1 K Mf Mg La parte de imagen con el identificador de relación rId8 no se encontró en el archiv o. EVOLUCION DE LA ESPECIFICACIÓN ACCIÓN REALIZADA Mp Tr Ts Margen de fase Margen de ganancia Incremento de K Aumenta Disminuye Disminuye Disminuye Disminuye Incremento de Td Td < 1 ↓ Td > 1 ↑ Disminuye Disminuye Disminuye Disminuye • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á Modelo conceptual del regulador PID Reglas del modelado conceptual de un regulador PID •Cadena abierta • Validación • Conclusiones Organización de reglas existentes Organización de conocimiento existente con nuevas reglas Deducción de nuevas reglas para completar el modelo de conocimiento • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á Se obtiene el modelado conceptual en base a: •Diseño de PID para sistemas del Benchmark de Ästrom. •Volúmenes de estabilidad. •Influencia I fl i de d los l parámetros á t d l regulador del l d PID. PID Los dos últimos están dirigidos básicamente a que se tenga conocimiento de la función de transferencia. Reglas del modelado conceptual de un regulador PID •Cadena abierta • Validación • Conclusiones Esquema q general g del conocimiento: • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á Relación de esquemas de conocimiento deducidos Reglas del modelado conceptual de un regulador PID •Cadena abierta • Validación • Conclusiones •Entorno a 500 reglas en total: 154 deducidas para el esquema de conocimiento propuesto. propuesto Resto reglas existentes de otros autores y para organización de conocimiento existente. • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Esquema general del conocimiento para cadena abierta: Cadena abierta • Validación • Conclusiones Ejemplos Reglas Regla rg.1.1.1 rg 1 1 1 Regla rg.2 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Cadena abierta Función F ió d de transferencia Sin ffunción Si ió d de transferencia Cadena abierta • Validación • Conclusiones No No Es un sistema FOLPD ? (Consultar Figura 1.a) Si Es un sistema FOLPD ? (Consultar Figura 1.a) Si No será posible realizar el ajuste en cadena abierta abierta, se debe buscar otro tipo de sintonía Ver regla rg.2 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Esquema general del conocimiento Para cadena abierta: Cadena abierta • Validación • Conclusiones Ejemplos Reglas Regla rg.1.1.1 rg 1 1 1 Regla rg.2 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Cadena abierta • Validación • Conclusiones Fi Figura 1 1.a No Se estabiliza a un valor constante ante una entrada escalón y además NO tiene sobreoscilación ? Si No Presenta retardo puro ? Si No es un sistema FOLPD Es un sistema FOLPD • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Esquema general del conocimiento Para cadena abierta: Cadena abierta • Validación • Conclusiones Ejemplos Reglas Regla rg.1.1.1 rg 1 1 1 Regla rg.2 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Cadena abierta • Validación • Conclusiones • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Esquema general del conocimiento Para cadena abierta: Cadena abierta • Validación • Conclusiones Ejemplos Reglas Regla rg.1.1.1 rg 1 1 1 Regla rg.2 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID No Se adapta exactamente a alguno de los sistemas contemplados en el Benchmark ? (ver regla rg.1) Si Se determina el grupo con características genéricas al que pertenece el sistema sistema, según el valor del parámetro L/T Una vez conocido el sistema concreto, t qué é opción ió se d desea seguir? Cadena abierta • Validación • Conclusiones Se desea seguir un criterio de ajuste concreto para optimizar una especificación (ver regla rg.1.1) Se desea optimizar más de una especificación a la vez (ver regla rg.1.3) Cambio en la carga Seguimiento de la consigna Min. Tr Min. Ts Min. Mp Min. Tp Min. Tr Min. Ts Min. Mp Min. Tp Ver rg.1. 11 1.1 Ver rg.1. 12 1.2 Ver rg.1. 13 1.3 Ver rg.1. 14 1.4 Ver rg.1. 15 1.5 Ver rg.1. 16 1.6 Ver rg.1. 17 1.7 Ver rg.1. 18 1.8 Se desea optimizar una sola especificación sin concretar un criterio (ver regla rg.1.2) Ver regla rg.2 Minimizar Tr Minimizar Ts Minimizar Mp Minimizar Tp Ver rg.1.2.1 Ver rg.1.2.2 Ver rg.1.2.3 Ver rg.1.2.4 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Esquema general del conocimiento Para cadena abierta: Cadena abierta • Validación • Conclusiones Ejemplos Reglas Regla rg.1.1.1 rg 1 1 1 Regla rg.2 Posible deducción manual • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad 0,8 • Reglas para ajuste fino en base a variación de parámetros á 0,6 • Ejemplo: regla rg.1.1.1 Sistemas ordenados de menor a mayor valor de su parámetro L/T 1,2 1 L/T 04 0,4 0,2 Reglas del modelado conceptual de un regulador PID 0 F B1 D6 B2 A1 E6 E5 D5 E4 A2 B3 C1 C2 A3 B4 D4 C3 C4 E3 D3 D1 A4 D2 E1 E2 C5 Cadena abierta • Validación • Conclusiones valores l mínimos í i de d Tr T aplicando li d los l métodos ét d de d Cambio C bi en la l carga 4 3,5 3 2,5 2 1,5 1 0,5 0 Tr B1 D1 D2 B2 F Z&N E1 Z&N Z&N Z&N Z&N D3 A1 C5 C4 E2 D4 E3 B3 D5 D6 C3 C2 E4 C1 A2 A3 B4 E5 A4 E6 CHR Z&N Z&N CHR Z&N CHR Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N Z&N 20% 0% 0% • Si L/T ≥ 0.6763 se aplicará CHR 0% Mp para cambio en la carga. • Si L/T < 0.6763 se aplicará Ziegler&Nichols. • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Cadena abierta • Validación • Conclusiones Propuesta inicial de deducción de reglas con árboles de decisión Los árboles de decisión son una de las propuestas más comunes en aprendizaje automático y toma de decisiones. a d e b f Mejor resultado: c g J48 algorithm l ith 80% fit h i • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Esquema general del conocimiento Para cadena abierta: Cadena abierta • Validación • Conclusiones Ejemplos Reglas rg 1 1 1 Regla rg.1.1.1 Regla rg.2 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Cadena abierta • Validación • Conclusiones Ejemplo: regla rg.2 No se puede identificar un sistema concreto que se adapte a los contemplados t l d del d l Benchmark. B h k Se establecen tres subreglas atendiendo a: é •Regla rg.2.1 – Grupos con métodos para cambios en la carga. •Regla rg.2.2 – Grupos con métodos para seguimiento de consigna. •Regla rg.2.3 – Grupos con métodos para ambos criterios. Para establecer grupos el parámetro a tener en cuenta ha sido de nuevo L/T 12 1,2 1 0,8 0,6 L/T 0,4 0,2 0 F B1 D6 B2 A1 E6 E5 D5 E4 A2 B3 C1 C2 A3 B4 D4 C3 C4 E3 D3 D1 A4 D2 E1 E2 C5 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Cadena abierta • Validación • Conclusiones Ejemplo: regla rg.2.1 Grupos con métodos para cambios en la carga Sistema F B1 D6 B2 A1 E6 E5 D5 E4 A2 B3 C1 C2 A3 B4 D4 C3 C4 E3 D3 D1 A4 D2 E1 E2 C5 Mínimo Tr 0,16 (Z&N) 0,08 (Z&N) 0,53 (Z&N) 0,16 (Z&N) 0,36 (Z&N) 3,6 (Z&N) 1,84 (Z&N) 0 5 (Z&N) 0,5 0,77 (Z&N) 0,81 (Z&N) 0,45 (Z&N) 0,8 (Z&N) 0,77 (Z&N) 1 22 (Z&N) 1,22 1,22 (Z&N) 0,43 (Z&N) 0,63 (Z&N) 0,39 (Z&N) 0,44 (Z&N) 0,27 (Z&N) 0,08 (Z&N) 2,67 (Z&N) 0,15 (Z&N) Mínimo Ts 1,64 (Z&N) 1,01 (CHR 0% Mp) 5,19 (CHR 20% Mp) 2,08 (Z&N) 5,29 (Z&N) 54,01 (CHR 0% Mp) 29,27 (CHR 0% Mp) 6 57 (CHR 0% Mp) 6,57 11,51 (Z&N) 12,87 (CHR 0% Mp) 5,88 (CHR 0% Mp) 12,81 (CHR 0% Mp) 13,08 (CHR 0% Mp) 21 15 (CHR 0% M 21,15 Mp)) 21,15 (CHR 0% Mp) 7,76 (CHR 0% Mp) 13,13 (CHR 0% Mp) 16 (CHR 0% Mp) 14,05 (CHR 0% Mp) 11,77 (CHR 0% Mp) 8,19 (CHR 0% Mp) 68,87 (CHR 0% Mp) 10 (CHR 0% Mp) 0,18 (CHR 20% Mp) 10,17 (CHR 0% Mp) 0,41 (CHR 0% Mp) 13,69 (CHR 0% Mp) 0,37 (CHR 0% Mp) 90 (CHR 0% Mp) Mínima Mp Mínimo Tp 47% (CHR 0% Mp) 0,44 (Z&N) 45% (CHR 0% Mp) 0,23 (Z&N) 45% (CHR 0% Mp) 2,07 (Z&N) 47% (CHR 0% Mp) 0,44 (Z&N) 46% (CHR 0% Mp) 0,89 (Z&N) 46% (CHR 0% Mp) 9,96 (Z&N) 47% (CHR 0% Mp) 5,53 (Z&N) 2 01 (Z&N) 2,01 42% (CHR 0% Mp) 2,52 (Z&N) 46% (CHR 0% Mp) 2,14 (Z&N) 45% (CHR 0% Mp) 1,26 (Z&N) 45% (CHR 0% Mp) 2,28 (Z&N) 45% (CHR 0% Mp) 2,39 (Z&N) 43% (CHR 0% Mp) 3 4 (Z&N) 3,4 41% (CHR 0% M Mp)) 3,4 (Z&N) 40% (CHR 0% Mp) 1,87 (Z&N) 39% (CHR 0% Mp) 2,59 (Z&N) 39% (CHR 0% Mp) 2,72 (Z&N) 40% (CHR 0% Mp) 1,87 (Z&N) 32% (CHR 0% Mp) 1,59 (Z&N) 37% (CHR 0% Mp) 1,09 (Z&N) 46% (CHR 0% Mp) 24% (CHR 0% Mp) 8,86 (CHR 20% Mp) 1,33 (Z&N) 44% (CHR 0% Mp) 51% (CHR 0% Mp) 1,53 (CHR 0% Mp) 37% (CHR 0% Mp) 1,75 (CHR 0% Mp) 102% (CHR 0% Mp) 3,11 (CHR 0% Mp) Grupo IV: Condición: 0.6130 < L/T ≤ 0.639 (D3 a A4) •Para minimizar el Tr, se aplicará el método de Ziegler&Nichols. •Para Para minimizar el Ts Ts, Chien Chien, Hrones y Reswick 0% Mp Mp. •Para optimizar la Mp, Chien, Hrones y Reswick 0% Mp. •Para optimizar el Tp, Chien, Hrones y Reswick 20% Mp. • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Se realiza la validación tanto para cadena abierta como para cadena cerrada (9 sistemas en cada caso). Se efectúa S f tú para ell caso más á desfavorable d f bl → NO se adapta d t all Benchmark y se contemplan todos los métodos. Ej Ejemplo l (Sistema (Si 5 cadena d abierta): bi ) Áreas (A) Validación • Según g las reglas g rg.2.3, g , correspondientes al grupo XV, dado que el valor de L/T obtenido es de 0.1034: •Tr → Ziegler & Nichols •Ts → Kaya&Scheib min. ISE. •Mp → CHR 0% de Mp SC •Tp → Ziegler&Nichols. Conclusiones Qi H1 H2 Qb Qc Válvula b Válvula c G (s) h2 ( s ) G 1 .5 qi ( s ) (T 1s 1)(T 2 s 1) (40 s 1)(45s 1) Ziegler-Nichols Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Validación • tp =37.82 tr =18.88 0.5 Mp =46.2388 ts =224.25 0 0 1 2 Tiempo Según las pruebas realizadas al sistema: •Tr → CHR 20% de Mp CC •Ts → Kaya&Scheib min. ISE. •Mp → CHR 0% de Mp SC •Tp → Ziegler&Nichols. tp =40.48 Mp =19.0985 ts =113.32 3 0 4 0 1 2 Tiempo 4 x 10 Kaya & Scheib ISE 3 4 4 x 10 Kaya & Scheib ITAE 1.5 1.5 1 1 0.5 tr =18.08 Conclusiones tp =38.45 0.5 tr =18.82 M =11.3752 Mp 11 3752 ts t =102.77 102 77 0 0 1 2 Tiempo tp =40.36 M =19.1164 Mp 19 1164 ts t =112.99 112 99 3 4 0 0 1 4 x 10 2 Tiempo 3 4 4 x 10 CHIEN, HRONES Y RESWICK Mp 20% S. Consigna 1.5 Coinciden todas las reglas salvo la del Tr, siendo mejor CHR 20% de Mp CC que ZN indicada por la regla. Tr (ZN) = 15.05 seg. Tr (CHR 20% Mp CC) = 14.97 s CHIEN, HRONES Y RESWICK Mp 0% S. Consigna 1.5 1 1 Salida • tr =15.05 0.5 tr =21.23 0.5 tp =43 tr =29.03 0.5 Mp =12.9006 ts =222.64 0 0 1 2 Tiempo Mp =9.6672 ts =173.82 3 0 4 4 0 1 2 Tiempo 3 4 4 x 10 CHIEN, HRONES Y RESWICK Mp 20% C. Carga 1.5 x 10 CHIEN, HRONES Y RESWICK Mp 0% C. Carga 1.5 1 1 0.5 tr =17.49 tp =43.39 0.5 tr =14.97 Mp =44.9984 ts =240.93 Diferencia muy pequeña tp =57 Salida Diseño de PID para sistemas del Benchmark de Ästrom 1 Salida • 1 Salida Ajuste empírico de reguladores Salida S • Salida El control PID Salida S Introducción • 1.5 Salida • Kaya & Scheib IAE 1.5 0 0 1 2 Tiempo tp =37.85 Mp =49.1092 ts =224.94 3 4 4 x 10 0 0 1 2 Tiempo 3 4 4 x 10 • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID Validación • Conclusiones Resumen global de la validación Se han utilizado un total de 18 sistemas para comprobar la validez de las reglas (4 por cada sistema), probando un total de 72 casos. CADENA ABIERTA CADENA CERRADA El método indicado por la regla sí optimiza la especificación 24 casos 24/36 = 66.6% 30 casos 30/36 = 83.3% El método indicado por la regla optimiza la especificación tras un ajuste fino 7 casos 7/36 = 19.4% 6 casos 5/36 = 16.6% El método indicado por la regla hace que el sistema se vuelva inestable 4 casos 4/36 = 11.1% 0 casos 0/36 = 0% El método indicado por la regla no optimiza optimi a la especificación tras t as aplicar un ajuste fino 1 caso 1/36 = 2 2.7% 7% 0 casos 0/36 = 0% •Los éxitos en CA, son de 31/36 = 86.1% •Los fracasos en CA CA, son de 5/36 = 13.8% 13 8% •Los éxitos en CC, son de 36/36 = 100% •Los fracasos en CC, son de 0/36 = 0% Teniendo en cuenta conjuntamente cadena abierta y en cadena cerrada,, los j resultados son: •Éxitos totales tras la aplicación de las reglas = 67/72 = 93.05% •Fracasos totales tras la aplicación de las reglas = 5/72 = 6.94% • Introducción • El control PID • Ajuste empírico de reguladores • Diseño de PID para sistemas del Benchmark de Ästrom • Volúmenes de estabilidad • Reglas para ajuste fino en base a variación de parámetros á • Reglas del modelado conceptual de un regulador PID • Validación Conclusiones • ELECCIÓN DEL MÉTODO DE OBTENCIÓN DE LOS PARÁMETROS • CÁLCULO DE LOS CONTROLADOR PARÁMETROS DEL • AJUSTE FINO DE LOS PARAMETROS DEL CONTROLADOR • VENTAJAS DEL MODELADO CONCEPTUAL MUCHAS GRACIAS