desarrollo y evaluación de métodos avanzados de exploración
Anuncio

DESARROLLO Y EVALUACIÓN DE MÉTODOS
AVANZADOS DE EXPLORACIÓN SÍSMICA PASIVA.
APLICACIÓN A ESTRUCTURAS GEOLÓGICAS LOCALES DEL
SUR DE ESPAÑA.
Antonio García Jerez
Departamento de Física Aplicada
Universidad de Almería
Tesis doctoral
Almería, 2010
DESARROLLO Y EVALUACIÓN DE MÉTODOS
AVANZADOS DE EXPLORACIÓN SÍSMICA PASIVA.
APLICACIÓN A ESTRUCTURAS GEOLÓGICAS LOCALES DEL
SUR DE ESPAÑA.
Tesis presentada para la optar al grado de doctor, dentro del programa de
doctorado Física Aplicada, Sismología y Energías Renovables de la
Universidad de Almería
Doctorando:
Antonio García Jerez
Departamento de Física Aplicada
Universidad de Almería
Directores:
Vº Bº Prof. Dr. Francisco Luzón Martínez Vº Bº Prof. Dr. Manuel Navarro Bernal
Almería, 2010
A mis padres, Antonio y Mª Ángeles
AGRADECIMIENTOS
En primer lugar, quiero hacer constar mi agradecimiento a los directores Francisco Luzón y
Manuel Navarro por el apoyo recibido durante la realización de este trabajo.
En segundo lugar, debo reconocer la financiación recibida de organismos públicos.
Fundamentalmente provino de una beca FPI asociada al proyecto REN2003-08159-C02-01 de la
CICYT y de un contrato asociado al proyecto 115/SGTB/2007/8.1 de la Secretaria General para
el Territorio y la Biodiversidad del Ministerio de Medio Ambiente.
Quedo en deuda con mis compañeros y amigos J. Alfonso Pérez, Abigail Jiménez, Miguel A.
Santoyo, Javier Lázaro y Francisco J. Alcalá, cooperadores necesarios en la realización de esta
tesis. Algunas de sus aportaciones han sido la puesta a punto del Clúster, la ayuda prestada con el
MPI y con la manipulación de los sismómetros y la colaboración incondicional en las medidas de
campo más tediosas (en esto último, Alfonso y Javi han sido los mayores sufridores). Abigail me
permitió usar una implementación propia de un algoritmo genético y colaboró con su adaptación
y comprobación. Zakaría al Yuncha, César F. López, Serafín Limonchi, Ana Góngora y Alicia
Rivas han colaborado también de distintas maneras, principalmente en los trabajos de campo.
Los consejos de los profesores Francisco Sánchez Sesma, Francisco Vidal, Antonio Posadas, Mª
Dolores Romacho y José Manuel García también me han sido de gran apoyo en este periodo.
Quiero agradecer a Takahisa Enomoto la impagable ayuda prestada durante mi estancia en la
Universidad de Kanagawa (Yokohama). También es muy de agradecer el apoyo de Carlos López
Casado, quien ha puesto a mi disposición equipos de forma desinteresada. Además, como
profesor de Geofísica en la licenciatura en Física de la Universidad de Granada es, para bien o
para mal, corresponsable de mi opción por las Ciencias de la Tierra.
Quiero mostrar mi sincero agradecimiento a Stefano Parolai, Michael Asten, Ikuo Cho y los
revisores anónimos que, con sus comentarios críticos a los artículos en que se basa esta tesis, han
contribuido a mejorar su calidad, han abierto nuevas vías de investigación y han aportando
soluciones a algunas de las dificultades encontradas.
Finalmente, quiero agradecer el apoyo recibido de mi familia, especialmente de mis padres, de
mis dos hermanas Mª Ángeles y Beatriz y de mi mujer Carmen.
Índice.
ÍNDICE
1. Introducción.
1
1.1. Objetivo y estructura de la tesis.
1
1.2. Riesgo sísmico y efectos de sitio.
4
1.3. Estimación de efectos de sitio
6
1.3.1. Determinación empírica de la función de transferencia.
6
1.3.2. Determinación numérica de efectos de sitio a partir de la
estructura.
7
1.4. Determinación de la estructura de formaciones sedimentarias
mediante análisis de ondas superficiales.
8
1.5. Sobre la naturaleza del microtremor.
11
1.5.1. El origen del ruido sísmico
12
1.5.2. Composición del ruido sísmico.
13
1.5.3. Proporción de ondas Rayleigh y Love en el ruido sísmico.
16
2. Técnicas exploratorias basadas en el estudio del ruido ambiental.
19
2.1. Métodos basados en medidas puntuales. HVSR.
19
2.1.1. Fundamento teórico. Hipótesis.
21
2.1.2. Interpretación en términos de ondas superficiales.
23
2.1.3. Vínculo con la elipticidad de la onda Rayleigh.
23
2.1.4. Dificultades en la interpretación en términos de onda
Rayleigh.
26
2.1.5. Avances recientes sobre el origen del pico del HVSR.
27
2.1.6. Conclusiones sobre la validez de la interpretación de
Nakamura.
31
i
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
2.1.7. Un cálculo del HVSR basado en ondas superficiales.
2.2. Métodos f-k.
32
34
2.2.1. Método f-k convencional (CVFK).
35
2.2.2. Método f-k de alta resolución (HRFK).
39
2.2.3. Limitaciones del método.
41
2.2.4. Método f-k ante ondas planas con distintos acimuts y fases
correlacionadas.
43
2.3. Interferometría sísmica usando ruido ambiental. Una visión general.
3. Métodos de autocorrelación espacial.
45
49
3.1. Aproximación determinista vs. aproximación estocástica.
50
3.2. Representación del campo de desplazamientos.
51
3.2.1. Representación mediante una suma determinista de ondas
planas.
52
3.2.2. Expansión en serie de Fourier de las componentes vertical,
radial y tangencial del movimiento en función de la
coordenada acimutal.
56
3.2.3. Descripción del microtremor mediante campos aleatorios
estacionarios.
58
3.2.4. Densidades espectrales, correlación cruzada y
autocorrelación.
62
3.2.5. Coeficientes de Fourier de las densidades espectrales.
Relación con el caso determinista.
65
3.3. Método de autocorrelación espacial entre componentes verticales (vSPAC)
66
3.3.1. Formulaciones “equivalentes” del método v-SPAC.
69
3.3.2. Efectos del aliasing acimutal en métodos tipo SPAC.
71
3.3.3. Efectos del aliasing acimutal en el método v-SPAC.
73
3.3.4. Otras variantes del método v-SPAC y métodos relacionados.
79
3.4. Método de autocorrelación espacial de las componentes horizontales
(3c – SPAC)
83
3.4.1. Descripción del método. Formulación determinista.
83
3.4.2. Formulación para campos aleatorios estacionarios.
85
ii
Índice.
3.4.3. Efectos de un número finito de estaciones.
86
3.5. Método de las arrays circulares concéntricas (Doble Anillo o DR).
87
3.5.1. Formulación para campos aleatorios estacionarios.
90
3.5.2. Efecto de un número finito de estaciones. Una aproximación
numérica simplificada.
91
3.5.3. Efecto de un número finito de estaciones. Aproximación
analítica.
95
3.5.4. Efectos del ruido incoherente.
96
3.5.5. Un ejemplo numérico sencillo.
98
3.5.6. Comparación con otro método similar.
3.6. Método de la array circular única (SCA).
101
105
3.6.1. Descripción del método. Obtención de la velocidad de onda
Love.
105
3.6.2. Obtención de la velocidad de onda Rayleigh.
108
3.6.3. Primeros tests numéricos en un medio estratificado.
110
3.6.4. Implementación robusta del método SCA para ondas Love.
113
3.6.5. Desviación en las estimaciones de BII . Efectos de un
número finito de estaciones.
116
3.6.6. Efecto del ruido incoherente.
122
3.6.7. Comprobación de las formulaciones analíticas para B̂ II y
Bˆ II( s n ) en un ejemplo numérico.
3.6.8. Comparación con los métodos CCA-L y DR.
124
128
3.7. Conclusiones del Capítulo 3.
132
3.8. Apéndices del Capítulo 3.
135
4. Un algoritmo para la inversión del modelo de estructura
4.1. Introducción.
151
151
4.1.1. La solución del problema inverso. Aspectos probabilistas.
152
4.1.2. Cálculo del modelo medio y de las incertidumbres.
156
4.2. Métodos de búsqueda global.
158
4.2.1. Métodos de Monte Carlo.
158
4.2.2. Algoritmos genéticos.
159
4.2.3. Cristalización simulada.
159
iii
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
4.2.4. Otros métodos.
160
4.3. Métodos de búsqueda local.
161
4.3.1. Inversión linealizada.
162
4.3.2. Downhill Simplex.
163
4.4. Diseño e implementación de dos algoritmos híbridos.
163
4.4.1. Comprobación del algoritmo.
168
4.4.2. Cálculo de la eficiencia en la paralelización.
171
4.5. Resumen y conclusiones del Capítulo 4.
172
4.6. Apéndices del Capítulo 4.
174
5. Aplicaciones.
177
5.1. Caracterización de la cobertura sedimentaria del Polje de Zafarraya,
sur de España, mediante medidas del cociente espectral H/V de ruido
ambiental.
177
5.1.1. Introducción.
178
5.1.2. Contexto geológico.
179
5.1.3. Medidas de microtremor.
180
5.1.4. Ajuste del perfil de velocidades de onda S y de la relación
frecuencia-profundidad.
182
5.1.5. Discusión.
185
5.2. Aplicaciones en entornos urbanos: el caso de Mula (Murcia).
5.2.1. Entorno geológico.
190
190
5.2.2. Análisis de los registros de ruido ambiental. Cálculo de
curvas de dispersión de onda Rayleigh mediante v-SPAC.
193
5.2.3. Análisis de los registros de ruido ambiental. HVSR y
periodos predominantes.
195
5.2.4. Inversión de perfiles de velocidad de onda S a partir de
HVSR y curvas de dispersión de onda Rayleigh.
5.2.5. Discusión.
196
198
5.3. Observación de ondas Rayleigh y Love en la desembocadura del río
Andarax (Almería).
202
5.3.1. Introducción.
202
5.3.2. Contexto geológico, instrumentación y adquisición de datos.
202
iv
Índice.
5.3.3. Análisis de los registros del sitio “Universidad de Almería”.
206
5.3.4. Análisis de los registros del sitio “Desaladora”.
217
6. Conclusiones y futuras líneas de trabajo.
221
6.1. Conclusiones.
229
6.2. Futuras líneas de trabajo.
234
Referencias
237
v
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
vi
CAPÍTULO 1
INTRODUCCIÓN
1.1. OBJETIVO Y ESTRUCTURA DE LA TESIS
El objetivo principal de esta tesis es evaluar, mejorar y ampliar en lo posible el conjunto de
herramientas de exploración sísmica pasiva de que se dispone, esto es, de métodos capaces de
proporcionar información sobre una estructura geológica, en términos de sus parámetros
elastodinámicos, sin requerir el uso de fuentes controladas de ondas sísmicas. En particular
interesan aquellos métodos que permitan realizar estudios detallados a escala geotécnica con un
tiempo de medida razonablemente corto y predecible. Por lo tanto, se desecha aquí el uso de la
sismicidad natural, recurriéndose al microtremor (ruido sísmico ambiental) como fuente de
excitación sísmica idónea. Como es sabido, el campo de microtremores consiste en vibraciones
debidas a fenómenos atmosféricos y a la actividad humana que se propagan por el suelo en
forma de ondas elásticas (Taga, 1993; Bard, 1999).
La determinación de las profundidades y las propiedades elásticas de los depósitos sedimentarios
es un importante objetivo en varios campos científicos y técnicos. El perfil de velocidades y su
geometría es una información necesaria para que geofísicos y sismólogos puedan modelar la
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
respuesta sísmica de las cuencas sedimentarias (p. e. Luzón et al., 1995, 2004), permitiendo una
evaluación detallada de la peligrosidad sísmica. Asímismo, estos métodos pueden aportar
información gemorfológica o incluso ser útiles en la búsqueda de recursos naturales. Como
último ejemplo, el perfil de velodidades de ondas S es un dato útil en ingeniería para la correcta
contrucción de edificios y estructuras. De hecho, la velocidad media de onda S de los primeros
30m, VS30, es una característica representativa del sitio valorada en varios códigos sísmicos
(NCSE-02, Eurocode-8, ...).
La investigación sobre el aprovechamiento del ruido sísmico en exploración geofísica ha
experimentado un gran desarrollo en las dos últimas décadas. Indudablemente, la relativa
facilidad para disponer de instrumentos portátiles con buena sensibilidad y respuesta espectral ha
sido el caldo de cultivo de este rápido desarrollo. Una parte importante de las iniciativas al
respecto han surgido en el seno de proyectos europeos como SESAME, SISMOVALP o
NERIES. Son muy relevantes en este sentido los trabajos doctorales de Cornou (2002),
Bonnefoy-Claudet (2004) y Wathelet (2005) entre otros. Entre los citados, es seguramente en el
proyecto europeo SESAME (2001-2004) donde se abordó más directamente la cuestión del
procesado del ruido sísmico, estando los principales esfuerzos dedicados al desarrollo de
software, a la evaluación de las virtudes y limitaciones de los métodos previamente existentes y
al desarrollo de pautas para estandarizar su aplicación. La evolución de los métodos de análisis
fue dejada en segundo plano, utilizándose generalmente los desarrollos de Aki (1957), Capon
(1969), Kvaerna and Ringdahl (1986) y Nakamura (1989) directamente o con modificaciones
menores. Sin embargo, desde 2004 se han publicado varias técnicas innovadoras de procesado de
ruido sísmico obtenido con array sísmica de escala geotécnica, muchas de la mano de científicos
japoneses. Se pueden citar los trabajos de Cho et al. (2004, 2006a, 2006b, 2008), Tada et al.
(2006, 2007, 2009, 2010), Morikawa (2006), Morikawa et al. (2009), Draganov et al. (2006) y
Picozzi et al. (2009) entre otros. El objetivo último de esta tesis es poner “un grano de arena” en
la evolución de estos métodos de exploración sísmica pasiva basada en el ruido ambiental.
Estructura de la Tesis
En este Capítulo 1 se enmarca el trabajo en el contexto, mucho más amplio, de la evaluación de
los efectos de sitio, que a su vez representa el tercero de los cuatro aspectos considerados
habitualmente en la evaluación del riesgo sísmico, junto a la descripción de las fuentes
sismogenéticas y el cálculo de los efectos de propagación y de la vulnerabilidad de las
construcciones ante el sismo. Estudiando la propagación del ruido ambiental se pueden encontrar
-2-
Introducción.
propiedades de la estructura local y estimar o acotar las características de la función de
transferencia del suelo, que determinará la amplificación local de las ondas sísmicas. El bajo
costo de estos métodos facilita realizar estudios de detalle (en cuanto a resolución espacial) que
se denominan a veces microzonación sísmica. También se hace un repaso de la bibliografía
referente al origen del ruido sísmico (sus fuentes) y a su composición (tipos de ondas).
En el Capítulo 2 se hace una revisión de algunos métodos de exploración sísmica pasiva,
excluidos los de tipo SPAC que serán desarrollados en detalle en el capítulo siguiente. Se tratan
aquí el cociente espectral H/V (HVSR o método de Nakamura), el método f-k y la
interferometría sísmica con ruido ambiental.
El Capítulo 3 es el núcleo de la parte metodológica de esta tesis, conteniendo los fundamentos
teóricos de dos técnicas originales de exploración sísmica pasiva, que se podrían catalogar como
“tipo-SPAC” y que han publicadas en el transcurso de este trabajo (García-Jerez et al. 2008a,
2008b y 2010). Para una de ellas (método “Double Ring” o DR) se presenta ahora un desarrollo
notablemente ampliado respecto al ofrecido en García-Jerez et al. (2008a), proponiéndose una
forma de implementación robusta y discutiéndose su relación con otras técnicas. Asimismo, se
presentan los desarrollos analíticos que permiten evaluar sus limitaciones en circunstancias
prácticas (uso de un número limitado de estaciones, presencia de ruido electrónico, distintas
condiciones de directividad del campo de ondas) y varios tests numéricos al respecto.
Se ha preferido dar a este capítulo un enfoque “integrador” exponiendo conjuntamente resultados
(métodos) ya conocidos y el material desarrollado en esta investigación. A mi juicio, este
formato es ventajoso porque los distintos métodos se van presentando consecutivamente de un
modo natural y unificado, aproximadamente en orden de complejidad creciente y apareciendo
todos como casos particulares de unas pocas ecuaciones básicas. Durante el desarrollo de los
métodos ya conocidos (como el SPAC en su variante para registros verticales, v-SPAC, y para
tres componentes, 3c-SPAC), se introducen también varios resultados novedosos de orden menor
(p. e. Sección 3.4.1, Ec. 3.4.14).
En el Capítulo 4 se revisan algunos métodos de inversión disponibles en la literatura que
permiten obtener modelos de la estructura cortical compatibles con los datos experimentales
(cocientes espectrales H/V, curvas de dispersión de ondas Rayleigh y/o Love, coeficientes de
SPAC o similares). Se describe un software híbrido desarrollado al efecto, en el que se combinan
-3-
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
búsquedas globales y locales en el espacio de los modelos y se realiza un tratamiento estadístico
de los resultados.
En el Capítulo 5 se compilan varias aplicaciones de los métodos de análisis de microtemor a
sitios concretos y con datos reales. En particular, se presenta un estudio de la geometría del
basamento en la cuenca de Zafarraya (Granada), una aplicación en un entorno urbano (la
localidad de Mula en Murcia) orientado a la microzonación sísmica y varios tests de los nuevos
métodos de procesamiento de las componentes horizontales, llevados a cabo en Almería.
Se termina con el Capítulo 6, donde se recopilan las conclusiones alcanzadas en la tesis y se
indican las líneas de trabajo que se pretenden seguir en el futuro.
1.2. RIESGO SÍSMICO Y EFECTOS DE SITIO
Según el Centro de Investigación de la Epidemiología de los Desastres Naturales (CRED), la
cifra de personas fallecidas por este tipo de fenómenos en el año 2006 se elevó a 21.342. El
mismo organismo señala que esta tasa anual presenta una tendencia decreciente desde el año
2000, si se exceptúan dos eventos: el tsunami en el océano Índico, de diciembre de 2004, y el
terremoto de Pakistán, de octubre de 2005. Estos datos dejan claro que, aunque relativamente
infrecuentes, el potencial destructor de las catástrofes de origen sísmico es extraordinario, tanto
en términos económicos (ver por ejemplo Figura 1.2.1) como en vidas humanas (p. e. Tablas
1.2.1 y 1.2.2), y sólo comparable al causado por las catástrofes de origen meteorológico. Además
del interés científico que suscita en general el estudio de los procesos naturales que afectan a la
evolución de la Tierra, la sismología es pues una ciencia que proporciona información relevante
para a la prevención de catástrofes humanas y cuyos resultados son de interés social.
Un primer paso en esta tarea de prevención del riesgo sísmico (grado de pérdidas esperadas en
un elemento debidas a un terremoto de una magnitud particular y en un periodo de exposición
determinado) es evaluar la peligrosidad sísmica de un emplazamiento, que se define como la
probabilidad de superación de un cierto valor de intensidad del movimiento sísmico del suelo en
un punto concreto y durante un periodo de tiempo determinado (UNDRO, 1980). Para ello han
de tenerse en cuenta tres factores: las características de las fuentes que podrían generar los
eventos, los efectos de la propagación de la energía sísmica por la corteza (especialmente en lo
relacionado con la atenuación de las ondas sísmicas) y los efectos locales o de sitio debidos a las
características geológicas superficiales en torno al punto estudiado.
-4-
Introducción.
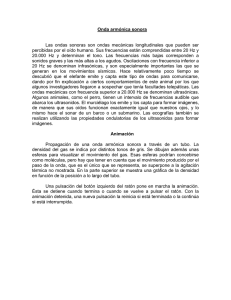
Tabla 1.2.1. Mortalidad asociada a diversos tipos de
Estimated damage (US$ billon) caused by reported natural disasters 1900-2009
desastres Naturales (1947-1980).
Hurricane Katrina
Extraído de Shah (1983)
Wenchuan earthquake
Tipo de desastre
Nº de víctimas
Kobe earthquake
Ciclones tropicales, huracanes, tifones
499.000
Terremotos
450.000
Inundaciones (no asociadas a huracanes)
194.000
Tormentas y tornados
29.000
Temporales de nieve
10.000
Volcanes
9.000
Olas de calor
7.000
Avalanchas
5.000
Figura 1.2.1. Estadística de daños económicos debidos
Deslizamientos de tierras
5.000
a desastres naturales entre 1900 y 2009. Fuente:
Tsunamis
5.000
Centre for Research on the Epidemiology of Disasters
(www.emdat.be).
Una
introducción
al
cálculo
de
la
peligrosidad sísmica puede encontrarse en el
Tabla 1.2.2. Terremotos más destructivos en términos
de vidas humanas entre 1985 y 2009.
País
R. P. China
Pakistan
Iran
Iran
URSS
India
Turquía
India
México
Indonesia
Japón
trabajo de Benito y Jiménez (1999). Los
efectos de sitio pueden llegar a tener gran
influencia en este cálculo, ya que la mayoría
de las grandes ciudades están situadas sobre
estructuras
sedimentarias
que
pueden
provocar una significativa amplificación de
las ondas sísmicas (p. e. Murphy and Shah
1988). Un ejemplo clásico de ello es el
terremoto de México de 1985, de magnitud
Fecha
12/05/2008
08/10/2005
21/06/1990
26/12/2003
07/12/1988
26/01/2001
17/08/1999
29/09/1993
19/09/1985
27/05/2006
17/01/1995
Fallecidos
87476
73338
40000
26796
25000
20005
17127
9748
9500
5778
5297
MS = 8.1 que provocó la muerte a casi 10000 personas (Tabla 1.2.2) y destruyó más de 1000
construcciones. Este terremoto no provocó daños graves en la zona epicentral, pero sí en puntos
situados sobre los sedimentos lacustres de Ciudad de México, a unos 400km, que sufrieron
amplificaciones de hasta 50 en la banda 0.2 – 0.7 Hz (Singh et al., 1988; Shapiro et al., 2001 han
investigado la composición del campo de ondas en esta zona lacustre). Otros casos
paradigmáticos de terremotos con efectos de sitio notables son el terremoto de Spitak (Armenia,
7 de diciembre de 1988, Ms = 6.8) con amplificaciones de hasta 30 en la banda 0.4-2Hz
(Borcherdt et al., 1989); el de Loma Prieta (17 de octubre de 1989, Ms=7.1, Borcherdt, 1990); el
de Northridge (California, Teng and Aki, 1996) del 17 de enero de 1994, Ms = 6.7, que pasa por
ser el más costoso en la historia de Estados Unidos o en el terremoto de Kobe de 1989 (Ms = 6.8,
-5-
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Toki et al. 1995), el más destructivo en Japón desde 1923. En este último caso, se ha sugerido
que la variación espacial de intensidad puede atribuirse a los efectos de borde de cuenca.
Como los efectos de sitio dependen en gran medida de las propiedades locales del suelo, que
pueden ser muy variables incluso a escala urbana, su evaluación detallada (microzonación
sísmica) necesita de métodos de bajo coste económico que permitan encontrar la estructura del
suelo en un punto dado o, al menos, características de su respuesta ante las ondas sísmicas
(función de transferencia).
1.3. ESTIMACIÓN DE EFECTOS DE SITIO.
1.3.1. DETERMINACIÓN EMPÍRICA DE LA FUNCIÓN DE TRANSFERENCIA.
Cocientes espectrales entre registros sísmicos
El método más directo de estimar el efecto de sitio en un punto situado en una estructura
sedimentaria sin conocimiento previo la geometría y propiedades elásticas de ésta es la
comparación entre registros sísmicos registrados en el punto bajo estudio y los que, para el
mismo evento, se obtienen en el basamento o en un afloramiento rocoso cercano. La técnica
consiste normalmente en calcular el cociente (función de transferencia) entre las amplitudes de
los espectros de Fourier
en sedimentos (usualmente en la componente horizontal) y las
correspondientes a la referencia en roca (Borcherdt, 1970). Si el punto de referencia está
suficientemente próximo, esta operación cancelaría idealmente los efectos de fuente y de
camino, que son factorizables en el dominio de la frecuencia (Figura 1.3.1). Algunas aplicaciones
de esta técnica pueden encontrarse en los trabajos de Borcherdt and Gibbs (1976), ChávezGarcía et al. (1990), Frankel et al. (2001) y Satoh et al. (2001a).
Lermo and Chávez-García (1993) propusieron simplificar el método utilizando el cociente
espectral de las partes intensas del movimiento sísmico grabado en las componentes horizontal y
vertical de una misma estación situada sobre sedimentos, evitando la necesidad de la estación de
referencia. Esto puede considerarse como una aplicación en el dominio de la frecuencia del
método de la “función receptor” propuesto por Langston (1979). Algunas aplicaciones,
principalmente en zonas de sismicidad moderada, fueron realizadas por Field and Jacob (1995),
Bonilla et al. (1997) o Loh and Wu (1998).
-6-
Introducción.
Figura 1.3.1. Representación esquemática de efectos de fuente, camino y sitio para el basamento y para un punto
situado sobre sedimentos. El efecto de sitio se puede estimar como el cociente espectral entre los registros en
sedimento y los registros en roca: Ssitio()=Ssedimento() / Sbasamento().
Cocientes espectrales con ruido ambiental
La utilización de ruido ambiental (microtremor) para la estimación de las propiedades más
relevantes de la función de transferencia de un sitio fue introducida por Nogoshi and Igarashi
(1971), quienes utilizaron los espectros del ruido grabado en un punto situado sobre sedimentos
para encontrar los periodos de vibración característicos de éste. Nakamura (1989) propuso usar
el cociente entre los espectros horizontal y vertical para estimar la amplificación máxima y la
frecuencia a la que ésta corresponde (frecuencia predominante). El procedimiento, que es
análogo al propuesto por Lermo and Chávez-García (1993) para registros sísmicos, es en la
práctica de una gran sencillez y economía y ha sido utilizado extensivamente en las últimas
décadas. Las distintas interpretaciones de este método, que es denominado HVSR (Horizontalto-Vertical Spectral Ratio) a lo largo de esta Tesis, se detallarán en el Capítulo 2.
1.3.2. DETERMINACIÓN NUMÉRICA DE EFECTOS DE SITIO A PARTIR DE LA
ESTRUCTURA.
Si se dispone de un modelo suficiente detallado de la estructura a investigar, sería posible
determinar su respuesta ante una excitación sísmica dada (y consecuentemente, los efectos de
sitio) mediante la resolución de la ecuación de Navier. Para algunos tipos de cuencas
sedimentarias con geometrías simples se han obtenido soluciones analíticas (p.e. Trifunac, 1971;
Wong and Trifunac, 1974; Lee, 1984; Sánchez-Sesma, 1987). En el caso de que la estructura sea
-7-
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
más compleja (y al menos 2D), se requieren métodos de resolución numérica, que muchas veces
resultan intensivos en volumen de cálculo. Sin entrar en detalles, algunos de los más utilizados
son:
-
Resolución de la ecuación de Navier mediante diferencias finitas (Alterman and Karal,
1968; Boore, 1972; Kelly et al. 1976; Pérez-Ruiz, 2007).
-
Método de elementos finitos (p. e. Newmark, 1959).
-
Método pseudoespectral o de Fourier (Kosloff and Baysal, 1982).
-
Teoría de rayos y haces gaussianos (p. e. Jackson, 1971; Hanyga et al. 1985).
-
Método inderecto de elementos en la frontera (p.e. Luzón et al., 1995).
-
Método del número de onda discreto (Aki and Larner, 1970).
1.4. DETERMINACIÓN DE LA ESTRUCTURA DE FORMACIONES SEDIMENTARIAS
MEDIANTE ANÁLISIS DE ONDAS SUPERFICIALES.
Los sondeos mecánicos son quizá la forma más fiable y directa de determinar la estructura del
suelo. La tecnología actual permite realizar sondeos hasta varios kilómetros de profundidad,
incluso atravesar la corteza oceánica. Su principal inconveniente es la gran carestía que supone
realizar perforaciones más allá de unas pocas decenas de metros, lo que los hace inviables para
su aplicación con propósitos de zonificación sísmica en países en vías de desarrollo y regiones de
sismicidad moderada. Entre los métodos alternativos a las perforaciones (como la prospección
con ondas electromagnéticas o los estudios de resistividad eléctrica, etc.), los sísmicos son la
opción más apropiada, ya que permiten tratar con las propiedades elásticas del terreno que son
las que determinarán su respuesta ante un terremoto.
Las ondas P y S generadas artificialmente en la superficie de una estructura estratificada pueden
usarse eficazmente para la exploración ésta. Supóngase por ejemplo una capa de espesor H y
velocidad de propagación (del tipo de onda considerado) V1 sobre un semiespacio de velocidad
V2 > V1. Si se despliega una array lineal de sensores (con tiempo común) y se aplica una fuente
superficial en un extremo de ésta (con la orientación adecuada al tipo de onda que se pretende
grabar), la representación del tiempo de viaje de la primera llegada frente a la distancia
horizontal entre fuente y receptor tiene la forma que se muestra en la Figura 1.4.1. El primer
tramo, será una recta con pendiente 1/ V1 y ordenada en el origen 0 vinculada a la recepción de la
onda directa, que es la primera en alcanzar el receptor si este está suficientemente próximo a la
fuente. El segundo tramo de recta se debe a las ondas refractadas que inciden en el semiespacio
-8-
Introducción.
con el ángulo crítico, viajan por la interfaz a velocidad V2 y la abandonan, también con el ángulo
crítico, hasta incidir en el receptor. Con consideraciones geométricas sencillas y usando la ley de
Snell se demuestra que su pendiente es 1/ V2 y su ordenada en el origen brefrac = 2 H ( V22 - V12 ) /
(V1 V2). El despeje las tres incógnitas V1, V2, H a partir de una curva de tiempo de viaje como la
de la figura, es un ejemplo sencillo de sondeo de refracción. Su aplicación experimental requiere
desplegar una línea con sensores densamente distribuidos que sea suficientemente larga como
para recoger la onda refractada. Mota (1954) generalizó este método para el caso de un número
arbitrario de refractores, incluyendo la posibilidad de obtener el buzamiento de las capas si la
fuente se aplica sucesivamente en ambos extremos de la línea.
El tiempo de llegada de la onda reflejada por el semiespacio puede también usarse para
determinar los parámetros de la estructura, si bien el método de análisis es más complejo ya que
esta onda no es en ningún caso la primera que alcanza al receptor.
Figura 1.4.1. Esquema de la trayectoria de propagación y tiempos de llegada de las ondas directa, reflejada y
refractada creadas por una fuente puntual superficial sobre una estructura formada por una capa de espesor H y
velocidad de propagación V1 sobre un semiespacio con velocidad V2 > V1 .
Métodos basados en ondas superficiales
La relación entre las curvas de dispersión de ondas superficiales (funciones frecuencia velocidad) y los parámetros elásticos del suelo ha sido también usada extensivamente en
prospección geofísica para el cálculo de modelos de tierra unidimensionales, empleando
terremotos o fuentes controladas como método de excitación (por ejemplo Nazarian, 1984;
Navarro et al., 1997; Tokimatsu, 1997; Park et al., 1999, Raptakis et al., 2000; Duputel et al.,
2010). Se puede demostrar teóricamente que, a una distancia suficiente grande de la fuente, la
mayor parte de la energía generada por ésta se propaga en forma de ondas superficiales en lugar
de cómo ondas internas (P o S), lo que supone una ventaja para los métodos basados en el
análisis espectral de las ondas superficiales. Otra característica favorable es la sensibilidad a
-9-
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
capas de baja velocidad situadas bajo materiales más rígidos, que no la tienen los métodos de
refracción clásicos (p.e. Whiteley, 1994). Estas situaciones son comunes, por ejemplo, en
entornos volcánicos (Roberts and Asten, 2004). Por otra parte, el que los modelos obtenidos de
la inversión de las curvas de dispersión sean unidimensionales, supone una limitación del
método, que no existe si se usa la refracción de ondas internas.
El requisito fundamental para la aplicación de estas técnicas es disponer de una fuente de ondas
superficiales (generalmente Rayleigh) suficientemente intensa en el rango de frecuencias
deseado. El empleo de terremotos como fuente ( p. e. Dziewonski et al. 1969) puede resultar
inadecuado en regiones de sismicidad moderada o que carezcan de redes de sismómetros densas.
Otra opción es el uso de fuentes artificiales (explosiones, vibradores, …). El hecho de conocer y
poder decidir la ubicación y propiedades de la fuente presenta grandes ventajas prácticas. Sin
embargo, las fuentes de intensidad moderada, utilizables en entorno urbano, provocan señales
generalmente pobres en bajas frecuencias, que no pueden penetrar más allá de unas pocas
decenas de metros (Jongmans and Demanet 1993, Tokimatsu 1997).
El microtremor como excitación sísmica
El empleo del ruido ambiental como fuente de excitación sísmica (habitualmente como fuente de
ondas superficiales), es pues una opción muy atractiva que ha cobrado interés creciente en las
últimas décadas. Al contrario que los terremotos, el ruido ambiental tiene la ventaja de generarse
de forma continua, y comparado con una fuente artificial de pequeña intensidad, tiene
habitualmente un rango espectral más amplio. Sin embargo su utilización también presenta
aspectos problemáticos, como la incertidumbre en la ubicación y características de las fuentes, lo
que puede hacer necesarios sistemas de adquisición de datos y de análisis más complejos.
Algunos de estos métodos son:
-
El método de autocorrelación espacial (SPAC) en sus diferentes variantes (Aki, 1957,
1969; Okada and Matsushima, 1989; Bettig et al., 2001; Köhler et al., 2007).
-
El método f-k (frecuencia-número de onda) y sus variantes (p. e. Capon 1969).
-
Método ReMi (“Refraction Microtremor”, Louie, 2001).
-
Otros métodos de análisis de ondas Rayleigh en la componente vertical mediante array
circular (Henstridge, 1979; Cho et al. 2006a; Tada et al., 2007).
-
Métodos de array circular para ondas Love distintos del 3c-SPAC: métodos “Two radius”
(TR, Tada et al., 2006), “Double Ring” (DR, García-Jerez et al. 2006b, 2008a), “Single
- 10 -
Introducción.
Circular Array” (SCA, García-Jerez et al. 2008b, 2010), SPACL y “Centerless Circular
Array for Love waves” (CCA-L, Tada et al., 2009).
-
La extracción de funciones de Green entre parejas de estaciones mediante correlación
cruzada (Shapiro and Campillo, 2004), que ha sido testeada a escala geotécnica por
Picozzi et al. (2009).
El método f-k y la extracción de funciones de Green serán descritos en el Capítulo 2. El método
SPAC (y variantes), junto con los desarrollados en este trabajo de investigación (métodos SCA y
DR) se discuten en el Capítulo 3. En lo que resta del presente capítulo introductorio se revisará la
bibliografía existente acerca del origen y la composición del ruido ambiental.
1.5. SOBRE LA NATURALEZA DEL MICROTREMOR
El comienzo del registro sísmico digital a partir de los años sesenta y el desarrollo de las
estaciones de banda ancha a partir de los setenta han permitido la instalación de redes sísmicas
que, aunque destinadas a distintos propósitos, tienen capacidad de realizar grabaciones de ruido
sísmico ambiental en un amplio espectro de frecuencias, pudiendo ir desde los milihercios hasta
las decenas o centenares de Hercios. El poder medir fielmente estas vibraciones es quizá el
primer paso para que pasen de ser consideradas “ruido” (variaciones aleatorias no explicadas por
el modelo científico en vigor) a tratarse como un fenómeno natural merecedor de estudio del que
se puede extraer información valiosa.
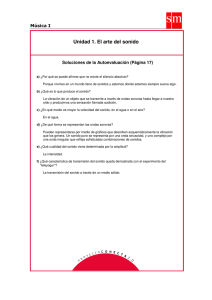
Peterson (1993) llevó a cabo una evaluación del espectro del ruido ambiental a nivel mundial
usando los registros del Albuquerque Seismological Laboratory obtenidos en 75 estaciones de
banda ancha desde 1972 (figura 1.5.1).
La principal característica encontrada en los espectros de ruido es la presencia de dos picos
alrededor de 5-7s y de 18 segundos (0.2 Hz y 0.06-0.07 Hz). Otra característica evidente es la
gran variabilidad del nivel de ruido en las estaciones continentales para periodos inferiores a 1s,
presentando dependencia en la hora del día, con un notable decremento en las horas nocturnas.
Como veremos a continuación, este comportamiento revela su origen en las actividades
humanas, si bien, en las estaciones insulares y en las costas, el ruido debido a microsismos y a
las olas puede superar al ruido cultural también en estas altas frecuencias.
- 11 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 1.5.1. Izquierda: posiciones de las estaciones consideradas en el estudio de Peterson (1993). Derecha:
densidad espectral del ruido en las distintas estaciones.
1.5.1. EL ORIGEN DEL RUIDO SÍSMICO
El origen del ruido sísmico (i. e. sus fuentes) ha sido investigado por distintos autores desde que
la capacidad técnica lo permitió. En 1911 ya se hizo una revisión mayor sobre el tema en forma
de tesis doctoral (Gutenberg, 1911). Una extensa revisión bibliográfica reciente puede
encontrarse en el artículo de Bonnefoy-Claudet et al. (2006b). En la Tabla 1.5.1 se muestran los
orígenes asignados al ruido sísmico según Gutenberg (1958), Asten (1978) y Asten and
Henstridge (1984) para distintos rangos de frecuencias. Como se aprecia en la tabla, al ruido
sísmico de frecuencias inferiores a 1Hz se le atribuye origen natural. El pico espectral a ~0.150.2Hz, antes mencionado, es el más prominente y se asocia a un efecto causado por las olas
oceánicas, que viajan en direcciones opuestas, generando ondas estacionarias que disipan energía
en forma de ondas elásticas.
Tabla 1.5.1. Fuentes de ruido ambiental en función de la frecuencia. Reproducido de BonnefoyClaudet et al. (2006b).
Gutenberg
(1958)
Olas oceánicas golpeando en las costas
0.05 – 0.1 Hz
Asten (1978),
Asten and Henstridge
(1984)
0.5 – 1.2 Hz
Monzones y perturbaciones meteorológicas a gran
escala
Ciclones sobre los océanos
Condiciones meteorológicas a escala local
Tremor volcánico
Urbano
0.1–0.25 Hz
0.16–0.5 Hz
0.3–1 Hz
1.4–5 Hz
2–10 Hz
1–100 Hz
0.5–3 Hz
- 12 -
1.4–30 Hz
Introducción.
Longuet-Higgen (1950) explicó este fenómeno, que resulta llamativo ya que la frecuencia
dominante en las ondas oceánicas es aproximadamente la mitad de la de las ondas elásticas
generadas. Tanimoto et al. (2006) han identificado ondas Rayleigh de esta frecuencia viajando
desde la costa en más de 70 estaciones del sur de California (si bien, esta directividad no resulta
tan clara en estaciones situadas en cuencas sedimentarias). Yamanaka et al. (1993) también
encontraron una clara correlación entre la altura de las olas y la amplitud espectral a 6.5s. Díaz et
al. (2010) han verificado esta dependencia en la mayoría de las estaciones de IberArray (una red
de 55 estaciones que fue desplegada en el sur de la península Ibérica y en el norte de Marruecos
desde verano de 2007). En general, el nivel espectral es mínimo en primavera y verano,
creciendo en otoño y con máximo en invierno. Díaz et al. (2010) encuentran que la máxima
variación estacional ocurre para un periodo de 9s.
El pico a ~0.06Hz (menos destacado) fue relacionado con el golpeo de las olas oceánicas en las
costas, que transferirían su energía en forma de ondas Rayleigh (Hasselmann, 1963).
Algunos autores emplean el término “microsismo” para referirse al ruido sísmico de origen
natural, y en especial el de periodos de hasta 20s, reservando “microtremor” para el de origen
antrópico. En esta memoria se utilizan “ruido sísmico”, “ruido ambiental” y “microtremor” como
sinónimos, englobando en estos términos a los microsismos. Se especificará la banda de
frecuencias y/o el origen cuando se requiera.
Aunque algunos estudios (Young et al., 1996; Withers et al., 1996) indican que el viento da lugar
a ruido sísmico de alta frecuencia (entre 15 y 60 Hz), en sitios poblados y por encima de 5Hz las
fuentes son predominantemente urbanas (tráfico, maquinaria, pasos,…). Sin embargo, estas
ondas resultan fuertemente atenuadas al alejarse varios kilómetros de la zona generadora. Entre 1
y 5Hz hay una banda de transición en la que contribuirían ambos tipos de fuentes. Yamanaka et
al. (1993) demostraron, con medidas continuas en la Universidad de California del Sur en Los
Ángeles, la dependencia de la amplitud del microtremor de corto periodo (0.3s) con el ciclo
día/noche así como su caída durante el fin de semana, lo que prueba la elevada contribución de
fuentes antrópicas. Otras comprobaciones recientes de este hecho han sido llevadas a cabo por
Bonnefoy-Claudet, (2004) y Díaz et al. (2010).
1.5.2. COMPOSICIÓN DEL RUIDO SÍSMICO
Ésta es en gran medida, una cuestión aún abierta, a pesar de que ha sido estudiada por múltiples
autores. Los trabajos empíricos al respecto podrían clasificarse en dos grandes grupos en función
del método seguido: los basados en el estudio de la trayectoria tridimensional de la partícula y
- 13 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
los basados en medidas de array. En los primeros se explotan las diferencias en la polarización y
en el movimiento de una partícula cuando es sometida a los distintos de ondas (p. e., trayectorias
elípticas en el plano de incidencia en el caso de ondas Rayleigh). La segunda vía consiste en
calcular velocidades de propagación de las ondas presentes en el ruido sísmico (normalmente en
la componente vertical) e identificarlas comparando con las obtenidas teóricamente para los
distintos tipos de ondas partiendo de la estructura del sitio, que ha de ser conocida.
Adicionalmente, se han realizado simulaciones numéricas que permiten una mejor comprensión
del fenómeno. Bonnefoy-Claudet et al. (2006a) han analizado ruido sintético registrado en una
array virtual, concluyendo que la composición de éste depende al menos de dos factores: i) de la
posición de las fuentes (lejanas o cercanas, superficiales o profundas); ii) de la estructura del
sitio (del contraste de impedancia entre la posible capa sedimentaria y el basamento y de su
frecuencia de resonancia). Por tanto, muchos estudios experimentales podrían estar en buena
medida sesgados ya que la mayoría están realizados con estaciones situadas en roca y
relativamente protegidas del ruido urbano (de fuentes cercanas). Esta variabilidad en la
composición podría ser la causa de la falta de consenso general.
A continuación se mencionarán algunos resultados bien establecidos y algunos estudios recientes
clasificados por banda de frecuencias. Una revisión bibliográfica más extensa de los trabajos
anteriores a 2006 puede encontrarse en el artículo de Bonnefoy-Claudet et al. (2006b).
Periodos entre 20s y 5-7s
Es generalmente admitido que, en la banda entre 5-7 y 20s (de 0.05 a 0.15-0.20Hz) predominan
los modos fundamentales de ondas Rayleigh y Love (p. e. Lacoss et al., 1969, obtenido mediante
array sísmica), si bien, pueden encontrarse también indicios de contribuciones de modos
superiores. Tanimoto et al. (2006), estudiando la trayectoria de la partícula, ha encontrando
variabilidad estacional en las contribuciones de los distintos modos de onda Rayleigh.
Periodos entre 5-7s y 1s
Para periodos menores (entre 1s y 5-7s), la situación es más controvertida y el campo de ondas
puede estar compuesto por una complicada mezcla de estos modos fundamentales junto a modos
superiores de ondas superficiales y ondas internas (p. e., Koper et al., 2010). Incluso, en
ocasiones, los modos fundamentales pueden estar prácticamente ausentes (Toksöz and Lacoss,
1968). Sin embargo, también son muchos los autores que encuentran predominancia de los
modos fundamentales de ondas superficiales, al menos en estructuras sedimentarias. Toksöz
- 14 -
Introducción.
(1964) ya encuentra este resultado para periodos entre 1 y 6s (0.17Hz) analizando velocidades de
fase en algunas ventanas temporales en las que el ruido ambiental era unidireccional. Horike
también encuentra el modo fundamental en dos puntos de la cuenca de Osaka (Japón) a
frecuencias inferiores al hertzio, mediante medidas de f-k (concretamente, entre los 0.5 y los
3Hz, con contaminación de modos superiores de 2.48 a 3Hz en uno de los sitios). Yamanaka et
al. (1994) apoyan la predominancia de las ondas Rayleigh, aunque en base a evidencias algo más
indirectas (comparación entre la forma del cociente espectral H/V y a la curva de elipticidad, ver
Capítulo 2). Matsuoka et al. (1996) han comparado con éxito la curva de dispersión teórica del
modo fundamental Rayleigh para un punto de estructura conocida (con un 1 Km de sedimentos)
con los datos experimentales obtenidos mediante array (método v-SPAC) hasta periodos tan
altos como 5s (trabajo reproducido por Okada, 2003, págs. 106-109). Kagawa (1996) y FloresEstrella and Aguirre-González (2003) han obtenido curvas de dispersión en Ciudad de México
que bajan hasta 0.35Hz (2.9 s) y 0.28 Hz (3.6s) usando los métodos f-k y v-SPAC
respectivamente. Kunimatsu et al. (2005) alcanzan los 6.7 s (0.15Hz) en tres puntos de la llanura
de Yufutsu (Japón), interpretando los resultados como modo fundamental Rayleigh (salvo en el
rango 0.3 -1.2 Hz donde, en uno de los puntos, se intuye contaminación por modos superiores).
El supuesto límite de 1s para la interpretación mediante modos fundamentales de ondas
superficiales es rebasado en alguna medida en muchos otros estudios recientes (p. e. Cho et al.,
2004 y Tada et al., 2009). En esta memoria identificaremos curvas de dispersión de ondas
Rayleigh a periodos de hasta 1.7s (0.6Hz) con datos propios. Una explicación parcial de la
controvertida composición del ruido en este rango de periodos fue apuntada por Lacoss et al.
(1969), quienes afirman que la probabilidad de que el modo fundamental Rayleigh domine en el
ruido disminuye al alejarse de las zonas costeras, dada la fuerte atenuación que sufren las ondas
Rg. Esto explicaría la ausencia de estas ondas en las medidas realizadas en el LASA (Large
Aperture Seismic Array, Montana, EEUU) y está en consonancia con las simulaciones de
Bonnefoy-Claudet et al. (2006a) que ligan la predominancia de los modos fundamentales a la
existencia de fuentes superficiales cercanas en estructuras con altos contrastes de impedancia
entre sedimentos y basamento.
Periodos menores que 1s
Como se describió anteriormente, las fuentes urbanas cercanas (de haberlas) pasan a jugar un
papel esencial. De nuevo, estas favorecerían la excitación de ondas superficiales para contrastes
altos (contraste de velocidades de 3-4) mientras que también darían lugar a ondas internas
apreciables para contrastes menores (Bonnefoy-Claudet et al., 2006).
- 15 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Los resultados en ausencia de fuentes antrópicas arrojan de nuevo un panorama complejo. Li et
al. (1984) analizaron el microtremor entre 1 y 20Hz en un afloramiento rocoso en ausencia de
ruido urbano, encontrando altas velocidades de propagación, lo que sugiere que está compuesto
por ondas internas o modos superiores de ondas superficiales. En la banda de 1Hz a 4Hz Koper
et al. (2010) encuentran gran variabilidad de composiciones en un conjunto de 9 arrays sísmicas
permanentes distribuidas por toda la tierra, consistiendo en combinaciones de ondas P, PKP, Lg
y Rg.
1.5.3. PROPORCIÓN DE ONDAS RAYLEIGH Y LOVE EN EL RUIDO SÍSMICO.
Admitiendo que estemos en las circunstancias en las que dominan las ondas superficiales, queda
aún por dilucidar cuál es la proporción de ondas Rayleigh y Love. Hasta la fecha, la gran
mayoría de estudios de ruido ambiental mediante array sísmica se centran en el análisis de las
componentes verticales, de modo que las cuestiones relativas a las ondas Love no son
consideradas. Aún así, en la bibliografía pueden encontrarse varias determinaciones
experimentales de la relación Rayleigh-Love. En la mayoría de éstas (y en todas las que se citan a
continuación), ésta proporción es calculada para las componentes horizontales del campo (y por
tanto, la verdadera proporción energética de ondas Rayleigh en el campo tridimensional es
mayor que la que se indica).
Miyadera and Tokimatsu (1992) encontraron una distribución de energías entre las ondas
superficiales de 40% Rayleigh - 60% Love, con un margen de error de 10%. Tres estudios sobre
el tremor volcánico realizados también en la década de los ‘90 merecen atención:
-
Ferrazzini et al. (1991), encontraron en el pié del cráter Puu Oo del volcán Kilauea una
distribución energética de un 60% de onda Rayleigh frente al 40% Love, entre 1-2 y 8Hz.
Sin embargo, Aki (coautor del trabajo anterior) et al. (1978) encontraron una práctica
ausencia de ondas Rayleigh y, contrariamente, ondas Love muy notables en las medidas
realizadas en un lago de lava parcialmente solidificada cercano (sitio Kilauea Iki). Esta
aparente contradicción es explicada por los autores como un efecto debido a una capa de
roca fundida en este segundo sitio.
-
Chouet et al. (1996) encuentran un proporción de 30% Rayleigh frente al 70% Love en el
tremor del volcán Stromboli, entre 2 y 9Hz. Esta proporción se asume como
independiente de la frecuencia.
-
Métaxian and Lesage (1997) determinaron que la proporción de ondas Rayleigh en el
volcán Masaya está entre el 45% y el 51% para el rango de frecuencias entre 1 y 8Hz.
- 16 -
Introducción.
Recientemente, se han realizado estudios más detallados en los que se calcula esta proporción en
función de la frecuencia. Köhler et al. (2007) han estimado contenidos de onda Rayleigh entre el
10% y el 35% en la banda espectral de 0.5 a 2Hz en Pulheim (Alemania). En un trabajo de
Endrun and Ohrnberger (2009) se han analizado 20 experimentos de array sísmica en diferentes
sitios de Europa, obteniéndose que la contribución relativa de ambas ondas depende de la
frecuencia, con la potencia de onda Rayleigh variando entre el 10% y el 60% en la banda 115Hz y alrededor del 50% a frecuencias mayores y menores. Endrun (2010) detalla los
experimentos en muchos de estos sitios. Tada et al. (2010), con un método propio, han estimado
una contribución de ondas Love en dos áreas de la ciudad de Tokio en torno al 80% por debajo
de 2Hz, encontrando una gran variabilidad a frecuencias superiores. En la revisión literaria de
Bonnefoy-Claudet et al. (2006b) se concluye que las ondas Love predominan para frecuencias
superiores a 1 Hz. Sin embargo, como se ha descrito, hay cierta dispersión en los resultados,
encontrándose casos en los que las ondas Rayleigh son ligeramente predominantes (p. e. Cornou,
2002).
- 17 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
- 18 -
CAPÍTULO 2
TÉCNICAS EXPLORATORIAS BASADAS EN EL
ESTUDIO DEL RUIDO AMBIENTAL
En este capítulo se revisan tres métodos de exploración sísmica pasiva con ruido ambiental: la
técnica del cociente espectral H/V (HVSR o método de Nakamura), el método f-k y, con menor
detalle, la recientemente desarrollada interferometría sísmica. Se excluyen aquí los métodos de
tipo SPAC que serán desarrollados en profundidad en el capítulo siguiente.
2.1. MÉTODOS BASADOS EN MEDIDAS PUNTUALES. HVSR.
Probablemente, la forma más sencilla de obtener alguna información sobre la estructura
superficial usando medidas de ruido ambiental consiste en el empleo del cociente entre las
amplitudes espectrales de las componentes horizontal y vertical del movimiento. Esta técnica,
conocida como Técnica de Nakamura, H/V o HVSR (Horizontal-to-Vertical Spectral Ratio) ha
sido empleada extensivamente en las últimas décadas, dada su economía en dispositivos y
requerimientos logísticos, ya que sólo se necesita obtener un registro en tres componentes del
microtremor por cada punto investigado (ver ejemplos en Lermo and Chávez-García, 1993 y
1994; Gaull et al., 1995; Abeki et al., 1996; Fäh et al., 1996; Alfaro et al., 1997; Fäh 1997;
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Guéguen et al., 1998; Navarro et al., 1998; Regnier et al., 2000; Tobita et al., 2000; Alfaro et al.,
2001; Ansal et al., 2001; Bodin et al., 2001; Navarro et al., 2001; Satoh et al., 2001b; Rosset et
al., 2002; Al Yuncha et al., 2004; Almendros et al., 2004; Talhaoui et al., 2004; Tuladhar et al.,
2004; García-Jerez et al., 2006a ente muchos otros).
Originalmente propuesta por Nakamura (1989), la técnica ha sido y es aún objeto de controversia
en lo relativo a su interpretación física y su utilidad. Suponiendo una estructura sedimentaria, la
técnica de Nakamura en “sentido restringido” supondría que:
i)
El primer máximo (el de menor frecuencia) del cociente entre las amplitudes
espectrales horizontal y vertical del microtremor ocurre a la frecuencia de resonancia
de las ondas S verticalmente incidentes.
ii)
La amplitud de dicho máximo coincide con la amplificación máxima de las ondas S
(máximo de la función de transferencia).
Algunos autores usan la Técnica de Nakamura en un sentido menos restrictivo (p. e. Herak,
2008), considerando que el cociente espectral HVSR es una estimación de la función de
transferencia para un rango amplio de frecuencias y no sólo en el entorno del máximo. El
conocimiento de estas características de la función de transferencia de ondas S, que es valioso
por sí mismo (p. e., para la estimación de efectos de sitio en estudios de peligrosidad sísmica de
un emplazamiento) puede permitir además el cálculo de parámetros elásticos o geométricos de la
estructura. Concretamente, utilizando que la frecuencia fundamental se correlaciona con la
profundidad al basamento, la técnica HVSR se puede emplear para determinar la geometría de
éste cuando la dependencia entre la velocidad de onda S con la profundidad en la cubierta
sedimentaria sea conocida o supuesta (Ibs-von Seht and Wohlenberg, 1999; Delgado et al.,
2000a, Delgado et al., 2000b; Parolai et al., 2002; García-Jerez et al., 2006a; entre otros).
Varios autores han avalado experimentalmente el método de Nakamura dentro de cierto grado de
aproximación. Como ejemplo, en la Figura 2.1.1 extraída de Konno and Ohmachi (1998) se
muestra una comparativa entre frecuencias y amplitudes medidas usando HVSR y las
correspondientes a la función de transferencia de ondas S con incidencia vertical para 14 puntos
con estructura conocida.
- 20 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
Figura 2.1.1. Relación de los periodos experimentales (figura izquierda) y las amplitudes experimentales (figura
derecha) del primer máximo del HVSR con los correspondientes a la función de transferencia de ondas S. Los datos
corresponden a 14 puntos en los que la estructura del suelo es conocida y el HVSR presenta un pico fundamental
pronunciado. Tomado de Konno and Ohmachi (1998).
2.1.1. FUNDAMENTO TEÓRICO. HIPÓTESIS.
Una revisión bastante exhaustiva del método con discusión de sus fundamentos teóricos fue
realizada en la pasada década por Bard (1999). En ese trabajo se critica la descripción original de
Nakamura y se pone en duda la vinculación directa de la forma del HVSR con la función de
transferencia de ondas S. El análisis de la versión más explícita del método (Nakamura, 1996), se
resume a continuación (Bard, 1999):
Nakamura (1996) parte de que campo de ondas que forma el microtremor puede separarse en su
componente de ondas internas (subíndice b) y la componente de ondas superficiales (subíndice
s). Entonces, las componentes horizontal (superíndice H) y vertical (superíndice V) en la
superficie de los sedimentos (S mayúscula) son:
S H ( f ) SbH ( f ) SsH ( f ) HT ( f )RbH ( f ) SsH ( f )
(2.1.1)
S V ( f ) SbV ( f ) SsV ( f ) VT ( f )RbV ( f ) SsV ( f )
(2.1.2)
donde RbV ( f ) y RbH ( f ) son los espectros de la parte de ondas internas en el basamento (sitio de
referencia en roca) en las componentes vertical y horizontal, VT ( f ) y H T ( f ) son las
amplificaciones “verdaderas” entre el basamento y la superficie de los sedimentos para las
- 21 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
componentes vertical y horizontal. A partir de (2.1.1-2), el cociente espectral entre las
componentes horizontal y vertical puede escribirse ahora como:
HVSR( f ) S H ( f ) S V ( f ) HT ( f )ARHV ( f ) B ( f )As ( f ) VT ( f ) B ( f )
(2.1.3)
donde ARHV es el cociente H/V para el sitio en roca ( ARHV = RbH / RbV ), B S sV / RbV , mientras
que As es el cociente H/V para las ondas superficiales: As = S sH / S sV .
En estas circunstancias, la validez del método de Nakamura a la frecuencia f, es decir, de la
relación HVSR( f ) HT ( f ) ) se tiene si ocurre que:
i) El cociente espectral H/V en roca es igual a 1 ( ARHV ( f ) = 1).
ii) La componente vertical no está amplificada ( VT ( f ) 1 ).
iii) B ( f ) es mucho menor que 1.
iv) B ( f )As ( f ) = S sH ( f ) / RbV ( f ) es mucho menor que H T ( f ) .
En base a la experiencia, se puede admitir la hipótesis i). La hipótesis ii) se puede argumentar
(Nakamura, 2000) considerando que las velocidades de propagación de la onda P en la cubierta
sedimentaria son generalmente mucho mayores que las de las S, lo que conlleva que las
resonancias de onda P se encuentren a frecuencias muy superiores a las de la onda S.
Las hipótesis iii) y iv) implican asumir la predominancia de las ondas internas sobre las
superficiales en las componentes vertical y horizontal del ruido medido en los sedimentos.
Efectivamente, admitida i), la condición iv) equivale a S sH ( f ) << SbH ( f ) (dominancia de
ondas internas en la componente horizontal). Análogamente, admitida ii), la condición iii) es
S sV ( f ) << SbV ( f ) (dominancia de las ondas internas en la componente vertical). Estas dos
desigualdades, que serán consideradas en la sección 2.1.6, contienen afirmaciones sobre la
composición del ruido ambiental que siguen en discusión aún en nuestros días (ver por ejemplo
Bonnefoy-Claudet et al., 2006a vs. Nakamura, 2007), si bien, cobran fuerza los argumentos en
contra de su validez general (i. e. para f arbitraria).
- 22 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
2.1.2. INTERPRETACIÓN EN TÉRMINOS DE ONDAS SUPERFICIALES.
Contrariamente a la interpretación de Nakamura del HVSR en términos de ondas internas,
muchos otros autores, y en la mayoría de las investigaciones recientes sobre el tema, se defiende
la vinculación del cociente espectral con las propiedades de las ondas superficiales (p. e. Lachet
and Bard, 1994; Konno and Ohmachi, 1998; Fäh et al., 2003; Scherbaum et al., 2003; Arai and
Tokimatsu, 2004).
En apoyo de esta tesis está el hecho bien establecido de que, para amplias bandas de frecuencia,
el microtremor consiste mayoritariamente en ondas superficiales, lo que se manifiesta en su
característico carácter dispersivo (Aki, 1957; Nogoshi and Igarashi, 1971; Chávez-García and
Luzón, 2005, entre muchos o otros). La mayoría de los trabajos en este campo usan registros de
componente vertical.
Aunque los estudios al respecto no son tan abundantes, el comportamiento predominantemente
dispersivo del ruido ambiental en la componente horizontal a frecuencias de interés geotécnico
ha sido avalado experimentalmente (ejemplos recientes: Di Giulio et al., 2006 y Fäh et al., 2008
usando f-k; Köhler et al., 2007 usando 3c-MSPAC; Tada et al., 2006, 2010 y García-Jerez et al.,
2008a, 2010 usando métodos tipo-SPAC de desarrollo reciente).
Como las ondas Love no conllevan movimiento en la componente vertical, el vínculo más
inmediato entre las ondas superficiales y el cociente espectral HVSR son las curvas de
elipticidad de la onda Rayleigh.
2.1.3. VÍNCULO CON LA ELIPTICIDAD DE LA ONDA RAYLEIGH
La trayectoria que sigue una partícula bajo la acción de una onda Rayleigh monocromática es, si
la atenuación inelástica es despreciable, una elipse recta sobre el plano vertical que contiene a la
dirección de propagación. Definimos la elipticidad de la onda Rayleigh como el cociente entre
las amplitudes del movimiento horizontal y vertical de la partícula (semiejes de la elipse). La
forma de las curvas de elipticidad es fuertemente dependiente de la estructura del suelo. En el
caso de un semiespacio homogéneo, la elipticidad depende exclusivamente del coeficiente de
Poisson , según las expresiones (Malischewsky and Scherbaum, 2004):
2 3
h3 ( ) h4 ( ) 5
h3 ( ) h4 ( ) 2
- 23 -
(2.1.4)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
donde se han definido las funciones auxiliares h1( ) , h2 ( ) , h3 ( ) y h4 ( ) :
h1( )
5 21 16
2
32 3 1 ;
3
h2 ( ) 11 56 1 ;
h3 ( ) 3 4 3 3 3h1( ) h2 ( ) ;
h4 ( ) 3 4 sign( 2 5 )3 3 3h1( ) h2 ( ) sign( 2 5 ) .
(2.1.5)
Esta relación, que se muestra en la Figura 2.1.2, representa también el límite de alta frecuencia
en estructuras complejas, si se evalúa usando el de la capa superior (límite de longitud de onda
Rayleigh mucho menor que el espesor de la capa superficial).
Figura 2.1.2: Elipticidad de la onda Rayleigh para un semiespacio homogéneo en función del coeficiente de Poisson.
(Reproducida de Malischewsky and Scherbaum, 2004).
En el caso de una estructura formada por una capa sobre un semiespacio más rígido (y en
modelos aún más complejos), la elipticidad es dependiente de la frecuencia. Su valor puede
calcularse para una estructura arbitraria siguiendo a Haskel (1953), mientras que, en este modelo
simple de una capa sobre el semiespacio puede usarse también la solución analítica obtenida por
Malischewsky and Scherbaum, (2004) en términos de la velocidad de fase de ondas Rayleigh.
- 24 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
Existen tres comportamientos distintos de la curva en función del contraste de velocidades de
ondas S entre la capa y el semiespacio (Fig. 2.1.3). En los casos en que el contraste de
velocidades es de al menos, 2.5 – 3, estas funciones presentan un pico bien definido (ver Figura
2.1.3, tipos 2 y 3). Si el contrate es mayor de 3.5 – 4 el pico tiene amplitud infinita y aparece en
una frecuencia próxima a la resonancia fundamental de las ondas S verticalmente incidentes
(Malischewsky and Scherbaum, 2004; tipo 3 en Figura 3) y se debe a una anulación en la
componente vertical simultánea a un cambio en el sentido en el que la partícula recorre su
trayectoria elíptica. Con contrastes menores, la frecuencia del pico puede desviarse notablemente
del valor de la resonancia S.
Figura 2.1.3. (a) Modelos de capa elástica sobre semiespacio y curvas de elipticidad correspondientes. Se muestran
las curvas de elipticidad para al modo fundamental correspondientes a VS = 250 m/s (Tipo 1), VS = 200 m/s (Tipo 2)
y 50 m/s (Tipo 3). Los coeficientes de Poisson usados son
10-4· ( VS -150) para VS
= 0.499 para VS < 150 m/s y
= 0.499 – 1.16·
150 m/s. Los espesores de la capa superior son tales que el periodo de 1 s corresponde a la
resonancia fundamental para ondas S. (b) Tipos de órbitas de la partícula para el modo fundamental Rayleigh.
(Traducido de Konno and Ohmachi, 1998).
En consecuencia, si en el pico del HVSR el campo de ondas estuviera dominado por las ondas
Rayleigh, persiste la posibilidad de usarlo para identificar la frecuencia de resonancia f0 (en caso
de contrastes altos) pero se desvanece la de estimar la amplificación máxima de ondas S a partir
de la amplitud de este, dado el comportamiento divergente de la elipticidad. Konno and Ohmachi
- 25 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
(1998) propusieron un modo de eliminar estas divergencias mediante un suavizado de las curvas
de elipticidad. Sin embargo, este suavizado no es un remedio completo porque, cuando el
contraste de impedancias es superior a 3, las amplitudes resultantes del suavizado son aún
fuertemente dependientes del coeficiente de Poisson en la estructura (por serlo las curvas de
elipticidad), además de variar con los detalles del suavizado (ver Fig. 13 en Konno and Ohmachi,
1998). Aún así, estos autores encuentran experimentalmente una relación de proporcionalidad
(con pendiente 2.5) entre la amplificación de la onda S y la amplitud de la elipticidad suavizada,
que es válida en casos en los que el coeficiente de Poisson sea próximo a 0.5 y usando un cierto
nivel de suavizado (dado por el parámetro b = 20 del tipo de ventana propuesta por los autores).
Si además se admite que la energía de la componente horizontal se distribuye en 40% para ondas
Rayleigh y 60% para ondas Love (Miyadera and Tokimatsu,1992) se deduciría la igualdad entre
la amplitud del HVSR y la amplificación de la onda S en la frecuencia de resonancia (Fig. 2.1.1).
2.1.4. DIFICULTADES EN LA INTERPRETACIÓN EN TÉRMINOS DE ONDA RAYLEIGH
Desafortunadamente, la interpretación de Konno and Ohmachi (1998) sobre la amplitud del pico
del HVSR descansa sobre hipótesis muy restrictivas (dominancia de las ondas superficiales en
torno a f0, un reparto energético concreto entre ondas Rayleigh y Love conocido y alto
coeficiente de Poisson) que no se satisfacen en todos los casos prácticos. Presentamos a
continuación algunos trabajos en los que se plantean objeciones a esta interpretación:
- Dependencia en el coeficiente de Poisson.
Lachet and Bard (1994) muestran, utilizando ruido simulado compuesto de ondas superficiales e
internas sobre estructuras unidimensionales complejas, que la correlación entre la amplificación
de ondas S y la amplitud del HVSR es pobre, insistiendo en la importante influencia del
coeficiente de Poisson de la capa superior en el segundo. Por el contrario, la utilidad del método
de Nakamura para identificar la frecuencia de resonancia es confirmada.
- La dominancia de las ondas Rg sobre las internas no es general.
La dominancia de las ondas superficiales entorno a la frecuencia f0 en modelos con alto contraste
de impedancia para cualquier tipo de fuente generadora del ruido no se puede admitir
teóricamente. En concreto, la distribución energética entre ondas Rayleigh y P-SV para una
fuente vertical superficial ha sido estudia por Tamura (1996) en función de la frecuencia y de la
distancia al receptor encontrando que las segundas dominan en las dos componentes del
movimiento (radial y vertical) en torno a f0 , incluso a largas distancias (Figura 2.1.4). En el caso
- 26 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
de que las fuentes del campo estén situadas fuera de la estructura sedimentaria (o en el
basamento) la dominancia de las ondas Rayleigh es aún más dudosa (ver Bonnefoy-Claudet et
al., 2006a; Langston et al., 2009; van der Baan, 2009 y la discusión posterior).
- El contenido Rayleigh-Love en la componente horizontal es incierto e influye en la forma del
HVSR
La distribución energética entre ondas Rayleigh y Love en la componente horizontal del ruido
ambiental, en general poco conocida, puede ser en teoría muy variable dependiendo de las
características de las fuentes (se hizo una revisión de la bibliografía el respecto en la Sección
1.5). Si las fuentes se modelan por fuerzas puntuales verticales, no se generarán ondas Love,
mientras que si tienen componentes horizontales apreciables orientadas arbitrariamente respecto
al observador, las ondas Love pueden ser dominantes en torno a f0, con gran diferencia sobre las
Rayleigh (p. e. Figura 2.1.5). Una hipótesis interesante debida a Bonnefoy-Claudet (2004) señala
a las ondas Love como las responsables del pico del HVSR en f0 en modelos de una capa sobre
semiespacio con contraste moderado (curva elipticidad tipo 2 en Fig. 2.1.3). En este tipo de
modelos, el modo fundamental y el primer superior Rg actúan simultáneamente en torno a f0, y el
segundo de ellos con movimiento de la partícula predominantemente vertical (incompatible con
un máximo en el HVSR). En la interpretación de esta autora, es el máximo de potencia de las
ondas Love en la fase de Airy (frecuencia para la que la velocidad de grupo mínima, que en estos
modelos ocurre aproximadamente a f0) el que aumenta significativamente el contenido espectral
de la componente horizontal provocando el pico.
El importante papel de las ondas Love ha sido confirmado por Cornou (1998) quien comprobó,
mediante ruido simulado, que la amplitud del pico fundamental del HVSR disminuye
significativamente en caso de que las fuentes no tengan componente tangencial respecto al
observador, lo que conlleva la no recepción de las ondas Love y SH. Endrun (2010) ha
encontrado experimentalmente, en un conjunto de 12 medidas, contribuciones de ondas Rayleigh
típicamente del 40%-50% a la frecuencia f0. Köhler et al. (2007) han estimado el porcentaje de
ondas Rayleigh en la componente horizontal en Pulheim (Alemania), encontrando indicios de la
disminución de este porcentaje en torno a la frecuencia de resonancia.
2.1.5. AVANCES RECIENTES SOBRE EL ORIGEN DEL PICO DEL HVSR
De bastante interés para la comprensión de la naturaleza de las ondas constitutivas del
microtremor en el entorno de los picos del HVSR resulta el reciente trabajo de Bonnefoy- 27 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 2.1.4: Cocientes entre las amplitudes de las ondas internas y de las ondas Rayleigh generadas por una fuerza
vertical superficial que actúa sobre la estructura indicada. El contraste de velocidades de onda S entre la capa
sedimentaria y el semiespacio (1.2, 1.5, 3, 6) aumenta conforme se baja en las columnas. La columna izquierda se
refiere al movimiento en la componente vertical, mientras que en la derecha se representa el movimiento horizontal
(radial). El significado de las variables es: H = espesor de la capa superior; = densidad; VP = velocidad de onda P ;
VS1 = velocidad de onda S en la capa; VS2 = velocidad de onda S en el semiespacio; r = distancia entre la fuente y el
receptor; 0 = longitud de onda del modo fundamental Rayleigh; f = frecuencia; f 0 = VS1/(4H); W = amplitud del
movimiento vertical; U = amplitud del movimiento horizontal; subíndice
Rayleigh. Reproducida de Tamura (1996).
- 28 -
b
= ondas internas; subíndice r = ondas
Técnicas exploratorias basadas en el estudio del ruido ambiental.
Claudet et al. (2006a), quienes han realizado simulaciones sobre un modelo 1D consistente en
una capa sedimentaria homogénea sobre un semiespacio entre los que existe un alto contraste de
impedancia (6.5) y factor de calidad bajo para la capa superior (QS = 25, QP = 50). En ese trabajo
usan diferentes tipos y distribuciones de fuentes, simulando también medidas de array en la
componente vertical para indagar en la naturaleza del campo de ondas. Los autores encuentran
toda una casuística para la forma del HVSR en función de las condiciones de las fuentes:
Figura 2.1.5. Energía liberada en forma de ondas superficiales por un conjunto de fuentes puntuales superficiales
con azimut aleatorio (calculada según Arai and Tokimatsu, 2000). La línea negra se refiere a la componente
horizontal del ruido mientras que la roja representa la vertical. En la subfigura A sólo se consideran fuentes
verticales, mientras que en B las fuentes forman 45 grados con la superficie del suelo. La diferencia entre las
componentes horizontales en periodos próximos y superiores a 0.28s (frecuencia fundamental de resonancia de onda
S en la estructura) se debe mayoritariamente a la aparición de las ondas Love en B. Nótese que la potencia generada
en forma de ondas de Rayleigh es mínima, en ambas componentes, en torno a la a la frecuencia de resonancia y muy
baja a frecuencias por debajo de ésta. Este cálculo, tomado de García-Jerez et al. (2004), está basado en un modelo
superficial para la Universidad de Almería.
- Que el HVSR tiene un solo pico destacado si las fuentes de ruido son cercanas (de 4 a 50 veces
el espesor de la capa) y superficiales. Además, el campo de ondas está dominado por ondas
Rayleigh. Para algunos tipos de dependencia temporal en la fuente encuentran un pico
secundario de amplitud mucho menor, situado a frecuencia doble de la fundamental, que
atribuyen a la presencia de ondas Love dominando la componente horizontal. Bonnefoy-Claudet
et al. (2008) matizan este resultado, indicando que el papel de las ondas Love en la amplitud del
pico es más y más importante conforme el contraste de impedancia entre sedimentos y
basamento disminuye.
- El HVSR presenta dos picos si las fuentes son distantes (más de 50 veces el espesor de la capa)
y están situadas dentro del estrato sedimentario. El primer pico es debido al modo fundamental
- 29 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
de onda Rayleigh y a la resonancia de ondas S, mientras que el segundo, situado a frecuencia
triple, se debe a la resonancia de ondas S exclusivamente.
- En caso de fuentes profundas, situadas en el basamento, el HVSR presenta picos en el modo
fundamental y en las frecuencias de los armónicos de onda S. Sólo son significativas las ondas S,
que son reflejadas múltiplemente en la capa sedimentaria. Éste extremo ha sido confirmado
recientemente por van der Baan (2009). Experimentalmente, Langston et al. (2009) han
explicado el pico del HVSR en la desembocadura del Mississippi (a 4s) como debido a ondas
internas que se propagan casi verticales por la capa sedimentaria y que tendrían su origen en la
interacción de las ondas Rayleigh y Love generadas en las costas de Norteamérica con la base de
la estructura sedimentaria.
En la Figura 2.1.6 se muestran los resultados para el caso en que las fuentes son superficiales
(profundidad menor que 1/10 del espesor de la capa) y están situadas tanto a distancias cortas
como a largas, incluyendo un conjunto de fuentes lejanas distribuidas de modo rectilíneo en un
rango de azimut limitado (simulando la línea costera, por ejemplo). La buena concordancia entre
la velocidad aparente de las ondas en la componente vertical y el modo fundamental Rayleigh
para frecuencias superiores a la de resonancia (2Hz) se muestra en la Fig. 2.1.6b.
Figura 2.1.6. (a) HVSR (líneas negras) calculado para un modelos de una capa de propiedades (VS = 200 m/s, VP =
1350 m/s, = 1.9g/cm3, QS = 25, QP = 50) de 25 m de de espesor sobre un semiespacio de características (VS = 1000
m/s, VP = 2000 m/s, = 2.5g/cm3, QS = 50, QP = 100) usando fuentes cercanas, lejanas uniformemente distribuida en
azimut y lejanas en sólo un rango de azimut. Las fuentes son puntuales con direcciones aleatorias y situadas a 2 m
de profundidad. La línea gris gruesa es la función de transferencia de ondas S verticalmente incidentes en el modelo.
Las dos líneas grises delgadas son las elipticidades de los modos Rayleigh fundamental y superior. (b) Velocidades
aparentes (puntos en escala de grises) estimadas usando el método f –k para las componentes verticales (CVFK).
Las líneas continuas representan las velocidades de fase de los tres primeros modos Rayleigh. Traducida de
Bonnefoy-Claudet (2004).
- 30 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
El comportamiento entorno a la frecuencia de resonancia es complejo y los efectos de las ondas
internas parecen advertirse incluso en el caso de fuentes superficiales cercanas (Nakamura, 2007)
dando lugar a velocidades aparentes anormalmente altas. Por otra parte, cualquiera que sea la
verdadera participación de las ondas superficiales e internas, estos experimentos dejan claro que
la amplitud del pico, y en menor medida su frecuencia, dependen de esta proporción, que está
influenciada por las posiciones y características de las fuentes y del medio.
2.1.6. CONCLUSIONES
SOBRE
LA VALIDEZ DE
LA INTERPRETACIÓN DE
NAKAMURA.
Retomando en este punto la demostración de la Técnica de Nakamura basada en ondas internas
en lo referente a la amplificación para la frecuencia de resonancia fundamental (f0) podemos
concluir que:
- La dominancia de las ondas internas en la componente vertical grabada en la superficie del
estrato sedimentario ( S sV ( f 0 ) << SbV ( f 0 ) , condición iii) es plausible si el contraste de
impedancias es suficiente (Tamura, 1996) ya que S sV ( f 0 ) se hace pequeño (o se anula) debido a
la degeneración del movimiento de la partícula sometida a una onda Rayleigh en una trayectoria
puramente horizontal conforme dicho contraste crece. Además, para contrastes altos entre el
sedimento y el basamento, no hay modos Rayleigh alternativos al fundamental en torno a f0.
- Se necesita más investigación sobre el grado de cumplimiento de la condición de dominancia
de las ondas internas en la componente horizontal ( S sH ( f 0 ) << SbH ( f 0 ) , condición iv). Su
validez será tanto más cuestionable conforme la energía de las ondas Love en el ruido aumente.
Para fuentes superficiales cercanas con orientaciones aleatorias, las ondas Love son las ondas
superficiales dominantes en la componente horizontal a la frecuencia f 0 (p. e. Bonnefoy-Claudet
et al. 2008, Kölher et al. 2007; Endrun 2010, García-Jerez et al., 2004), resultando una amplitud
inestable del HVRS ante cambios la orientación de las fuentes (Bonnefoy-Claudet et al. 2008).
El cumplimiento de esta condición (iv) no se puede descartar en todos los casos, ya que si las
fuentes superficiales actúan verticalmente (o son radiales respecto al observador) las ondas Love
no juegan ningún papel y se tiene S sH ( f 0 ) << SbH ( f 0 ) para contrastes altos y fuente superficiales
(Tamura, 1996). Tampoco se puede descartar a frecuencias << 1Hz, a las que el campo está
generado por fuentes lejanas que pueden convertirse en ondas internas con dirección vertical en
la base de los sedimentos. Langston et al. (2009) defienden este mecanismo, si bien, los factores
- 31 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
de amplificación que aparecen en el HVSR habían de tomarse como una cota superior (la
amplificación sería menor para sismos locales en los que la onda S se propaga con trayectorias
más oblicuas).
2.1.7. UN CÁLCULO DEL HVSR BASADO EN ONDAS SUPERFICIALES.
Aunque la descripción del comportamiento del HVSR en torno a f0 sea inestable ante cambios en
la distribución de las fuentes y su descripción teórica compleja, existe la alternativa de sacar
partido de la forma de la función HVSR(f) para otras frecuencias en las que el comportamiento
es más regular y el campo de ondas está dominado, con más probabilidad, por las ondas
superficiales de origen local. Konno and Ohmachi (1998) ya advirtieron que la elipticidad de la
onda Rayleigh suele presentar gran semejanza a la función HVSR, llamando la atención sobre el
mínimo que presenta la primera a la frecuencia 2f0 (en casos de contrastes de impedancia altos)
que puede observarse en muchas ocasiones en las medidas de HVSR. Fäh et al. (2003) fueron
pioneros usando algoritmos genéticos para obtener las propiedades elásticas del suelo mediante
un ajuste de la forma del cociente espectral, calculado éste como la elipticidad del modo
fundamental de ondas Rayleigh. Sin embargo, los autores no obtienen buenos resultados en
algunos modelos en los que las ondas Love, los modos superiores de ondas superficiales y/o las
ondas internas tengan que ser considerados.
Una importante mejora fue introducida por Arai and Tokimatsu (2000, 2004) quienes
consideraron todos los modos de ondas superficiales (Rayleigh y Love) en el cálculo directo de la
forma del HVSR. De este modo, se estiman analíticamente los espectros de potencia horizontal
( PH ( ω ) ) y vertical ( PV ( ω ) ) en la superficie del medio debidos a una distribución de fuerzas
puntuales impulsivas, aleatoriamente orientadas en acimut y colocadas sobre una estructura 1D.
A partir de las expresiones asintóticas de los términos de ondas superficiales de las funciones de
Green (p. e. Harkrider, 1964) y considerando que los distintos modos interfieren
incoherentemente en el receptor (se suman las potencias de cada uno) estos autores expresan
PH ( ω ) y PV ( ω ) como:
PV Rm
m k Rm
2
2 2
1 m
2
- 32 -
(2.1.6)
Técnicas exploratorias basadas en el estudio del ruido ambiental.
2
2
2
2
PH R m m2 1 m2 L m ,
m kR m
2 m 2 k L m
(2.1.7)
siendo LH / LV y LV ( ω ) y LH ( ) las componentes vertical y horizontal (esta última con
dirección arbitraria) de las fuentes puntuales. El símbolo m ( ) representa la elipticidad
(cantidad real) del mésimo modo Rayleigh a la frecuencia considerada, Rm ( ) y Lm ( ) son
las respuestas del medio para ondas Rayleigh y Love definidas por Harkrider (1964), k Rm y k Lm
son los números de onda Rayleigh y Love del modo.
El cociente de proporcionalidad es aproximadamente igual en ambas expresiones y contiene un
factor relacionado con la atenuación del medio (Arai and Tokimatsu, 2004). El parámetro
determina el peso relativo de las ondas Rayleigh y Love, de forma que éstas últimas adquieren
mayor importancia conforme aumenta, mientras que sólo se consideran las primeras para =
0. Finalmente, el cociente espectral teórico se calcula como:
HVSR
PH
.
PV
(2.1.8)
Este método ha sido usado para invertir perfiles de velocidad de onda S a partir del HVSR sólo
(Arai and Tokimatsu, 2004) o conjuntamente con las curvas de dispersión de onda Rayleigh
(Arai and Tokimatsu, 2005; Parolai et al., 2005). En el primer caso, hay que tener en cuenta que
no se pueden invertir los espesores y las velocidades de las capas simultáneamente. En efecto, si
suponemos un modelo constituido por una capa de espesor H sobre un semiespacio, y tenemos
en cuenta que la elipticidad es una magnitud adimensional, concluimos que su dependencia con
la frecuencia f y con los parámetros elastodinámicos del suelo ha de ser de la forma
(
1 Hf VS 2
,
,
, , ) , con , ν y VS representando las densidades, coeficientes de Poisson
2 VS1 VS1 1 2
y velocidades de onda S de la capa (1) y del semiespacio (2). Esta dependencia en Hf / VS1
implica la imposibilidad de determinar espesor y velocidad usando solamente la forma de
HVSR( f ) .
Desafortunadamente, la aplicación de este método necesita realizar hipótesis sobre la proporción
de ondas Rayleigh y Love en el ruido (o, alternativamente, sobre la inclinación media de las
fuentes puntuales superficiales que lo generan, dada por el coeficiente , ver p. e. Figura 2.1.7)
- 33 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
que los autores fijan en 40% y 60% de la energía respectivamente, para todas las frecuencias,
siguiendo a Miyadera and Tokimatsu (1992).
Para evitar la indeterminación debida a las incertidumbres en la potencia relativa de ondas
Rayleigh y Love, García-Jerez et al. (2006c) hemos diseñado un método de cálculo de la
elipticidad. La estrategia consiste en utilizar las distintas características de polarización de las
ondas superficiales en la componente horizontal (longitudinal para la Rayleigh y transversal para
la Love) para obtener, mediante el empleo de arrays circulares de sensores, estimaciones
experimentales de la elipticidad que estén libres de los efectos de las ondas Love. Una estrategia
similar ha sido expuesta por Cho et al. (2006b, Apéndice E). Otra basada en métodos f-k ha sido
desarrollada por Poggi and Fäh (2010).
Figura 2.1.7 - Cocientes espectrales HVSR calculados para la Universidad de Almería según Arai and Tokimatsu
(2000) a partir de un modelo de suelo obtenido de información geotécnica. La línea gruesa representa la medida
experimental. Cada una de las líneas delgadas está asociada a un valor del cociente entre las amplitudes de las
componentes horizontal y vertical de la fuerzas puntuales superficiales que se suponen provocan el campo. Este
valor está relacionado directamente con la proporción de energía liberada en forma de ondas Rayleigh y Love.
(Reproducido de García-Jerez et al., 2004).
2.2. MÉTODOS f-k.
Bajo la denominación f-k (frecuencia-número de onda) se agrupan una serie de algoritmos
empleados en exploración geofísica para el cálculo de velocidades de propagación de ondas
- 34 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
sísmicas. La estrategia subyacente a estos métodos consiste en evaluar a una frecuencia dada, las
direcciones y velocidades de las ondas planas que explican mejor las diferencias de fase entre los
registros de los distintos sensores que forman una array sísmica. Desde los ’60, el desarrollo de
estas técnicas ha sido muy intenso, alcanzándose un alto grado de sofisticación (p. e. algoritmo
MUSIC, Schmidt, 1981).
En la mayoría de los casos, los métodos f-k son utilizados en exploración geofísica pasiva para
análisis de la componente vertical del movimiento. Se trata de técnicas muy flexibles en cuanto a
su aplicación en el campo, pues permiten utilizar arrays con geometrías arbitrarias. Además,
algunas variantes (CVFK) permiten calcular y analizar la estabilidad de múltiples soluciones
(números de onda) para cada frecuencia, siendo adecuadas para la separación de modos.
En esta sección sólo se pretende dar una exposición básica que sirva para poner en evidencia la
diferente orientación y las diferencias y debilidades respecto a las técnicas tipo SPAC que serán
desarrolladas en el siguiente capítulo.
2.2.1. MÉTODO f-k CONVENCIONAL (CVFK).
El método f-k convencional (Kvaerna and Ringdahl, 1986) es un modo directo e intuitivo de
evaluar las direcciones y velocidades de propagación predominantes en un campo de ondas. La
potencia de una pareja particular de valores f-k se determina “dirigiendo” la array hacia la
dirección y velocidad de fase correspondiente mediante los llamados “vectores de dirección”. Si
la array está formada por N sensores con posiciones R1, R2, …, R N , definimos el vector de
dirección e(k) como:
e(k ) exp i k R1 exp i k R 2 ... exp i k R N T
(2.2.1)
donde el superíndice T indica transposición. El estimador de la potencia PCVFK(k, ) para el
método f-k convencional se construye ahora (Zywicki, 1999) como:
PCVFK (k, ) = eH(k) C() e(k)
(2.2.2)
donde el superíndice H indica transposición y conjugación y la matriz de densidades espectrales
cruzadas C() es el promedio, para un conjunto de B ventanas temporales, de la matriz N
N de las correlaciones cruzadas:
- 35 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
B
C( ) jl 1 Sl*,n ( )S j ,n ( ) ,
B n 1
1 j, l N .
(2.2.3)
En la expresión (2.2.3), S j ,n ( ) representa la transformada de Fourier del registro
correspondiente a la n-ésima ventana temporal en el sensor j. El asterisco (*) representa
conjugación compleja. Sobreentendiendo en lo sucesivo el promedio sobre ventanas, podemos
expresar (2.2.3) en notación matricial como:
C( ) S( )S H ( )
(2.2.4)
siendo S( ) el vector columna de las transformadas:
S( ) S1 ( ) S 2 ( ) ... S N ( ) T .
(2.2.5)
Por construcción, la matriz C cumple la propiedad C = CH. La definición (2.2.2) se puede
escribir también como PCVFK (k, ) = |eH(k) S()|2.
Para comprender el comportamiento de PCVFK (k, ) analizamos tres casos:
- Incidencia de una onda plana con velocidad aparente infinita
Supongamos que sobre la antena sísmica incide una onda plana con velocidad aparente infinita,
es decir, tal que la forma de onda es registrada idénticamente por todos los sensores y sin desfase
temporal alguno. Esto puede visualizarse como la incidencia vertical de una onda P sobre una
array compuesta de sensores verticales, o de una onda S vertical sobre una array compuesta de
sensores horizontales paralelos entre sí. La igualdad entre las transformadas de Fourier de los
registros se simboliza S j ( ) = A( ) , pudiendose reescribir (2.2.2) como:
PCVFK (k, ) = |A()|2 N 2 Ptheo (k),
definiendo la respuesta de la array, Ptheo (k), como:
- 36 -
(2.2.6)
Técnicas exploratorias basadas en el estudio del ruido ambiental.
1 1 ... 1
1
1 1 ... 1
H
2
Ptheo (k) = e (k)
e(k)
/
=
N
... ... ... ...
N
1 1 ... 1
exp i k R
N
j 1
j
2
.
(2.2.7)
matriz N N
La función Ptheo (k) es característica de la distribución de sensores. Se trata de una función
periódica en el en el plano k x , k y , dada la naturaleza periódica de exp i k R . Ptheo (k)
presenta un máximo de valor unidad en k = 0 (ver Figura 2.2.1).
Figura 2.2.1. Ejemplos de respuestas de algunas arrays sísmicas. En los casos de arrays triangulares mostrados, se
puede apreciar ya la periodicidad de la función de transferencia en el rango de números de onda mostrado.
- Incidencia de una onda plana con velocidad aparente finita
- 37 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Si sobre la antena sísmica incide una onda plana monocromática con frecuenta angular y
número de onda k' , el registro en el dominio de la frecuencia del sensor j es S j ( ) =
A( ) exp( ik 'R j ) y la potencia estimada PCVFK (k, ) queda (p. e. Wathelet, 2005):
1
ik '( R R )
1
2
e
2
PCVFK (k, ) = A( ) eH(k)
...
e ik '( R1 R N )
e ik '( R 2 R1 )
1
...
e ik '( R 2 R N )
A( )
2
... e ik '( R N R1 )
... e ik '( R N R 2 )
e(k) =
...
...
...
1
2
N
e
i ( k ' k )R j
= A( ) N 2 Ptheo ( k k' ) , (2.2.8)
2
j 1
que es proporcional a la función respuesta de la array trasladada k' en el plano del número de
onda. Representando PCVFK (k, ), el valor de k' a la frecuencia puede hallarse como la
posición en dicho plano a la que se ha trasladado el máximo principal de Ptheo.
- Incidencia de múltiples ondas planas no correlacionadas con velocidades aparentes iguales (y
finitas)
En el caso de incidencia de un conjunto de N ondas planas de amplitudes complejas An ( ) y
números de onda k'n ( ) , 1 n N, el campo creado en el sensor j-ésimo se escribe Sj
N
= An e
ik n ' R j
y el estimador de potencia PCVFK (k, ) queda:
n1
PCVFK (k, ) = A Al e
*
j
i (( k j ' k )R n ( k l ' k )R m )
jlmn
= Al e i( k l ' k )R m
l
m
2
(2.2.9)
Si las ondas procedentes de distintas direcciones no están correlacionadas, el módulo de la suma
de números complejos en (2.2.9) es aproximadamente la suma de los cuadrados de los módulos
de los sumandos (suma incoherente de ondas):
PCVFK (k, )
A e
2
2
i (( k j ' k )R n )
j
j
n
= N 2 A j Ptheo (k j 'k )
2
j
- 38 -
(2.2.10)
Técnicas exploratorias basadas en el estudio del ruido ambiental.
Por tanto, si las ondas de frecuencia se propagan a la misma velocidad / k ' , la función
PCVFK (k, ) es una superposición de funciones respuesta de la array Ptheo( k ) centradas sobre
puntos de la circunferencia de radio k '
(correspondientes a los acimuts de las ondas
incidentes) y moduladas por la potencia de cada onda incidente.
2.2.2. MÉTODO f-k DE ALTA RESOLUCIÓN (HRFK).
Desarrollado por Capon (1969), el método f-k de alta resolución es teóricamente capaz de
proporcionar una mejor separación entre ondas viajando con vectores número de onda cercanos,
en comparación con el f-k convencional (CVFK).
En la práctica, la aplicación del HRFK se realiza sustituyendo el estimador de potencia
convencional por un nuevo estimador PHRFK (k, ) que se define como:
PHRFK (k, ) = 1/[eH(k)C-1() e(k)].
(2.2.11)
El método de Capon se basa en la utilización de ciertos pesos óptimos a los sensores. Si
denominamos a dichos pesos w1(k,), w2(k,), …, wN (k,), podemos introducirlos en las
expresiones matriciales definiendo la matriz de pesos W() como:
w 1 (k , )
0
0
0
w 2 (k , )
0
W(k, ) =
0
0
w3 (k , )
...
...
...
0
0
0
...
...
0 wN (k , )
...
...
...
0
0
0
(2.2.12)
y cambiando ahora la matriz de correlaciones cruzadas C en (2.2.2) por el producto WCWH (o,
equivalentemente, el vector de transformadas de Fourier S por WS), con lo que la forma del
estimador de ponencia genérico queda:
P(k, ) = |eH(k)W(k, )S()|2=eH(k)W(k, )C()WH(k, )e(k).
(2.2.13)
El método f-k convencional (ecuación 2.2.2) se recupera de (2.2.13) en el caso de que los pesos
valgan la unidad. En el f-k de alta resolución, los pesos se eligen cumpliendo dos condiciones:
- 39 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
i)
En el caso de incidencia de una onda plana de frecuencia , amplitud A y número
de onda k ' , es decir S( ) A()e(k ' ) , los pesos han de hacer que la señal “pase por
la array” con ganancia unidad. Esto se puede escribir (a la vista del término central de
2.2.13) como
e H (k ' )W(k ' , )e(k ' ) 1
ii)
(2.2.14)
La potencia es mínima para cualquier otro número de onda, lo que implica encontrar
la matriz de pesos que hace eH(k)W(k, )C()WH(k, )e(k) mínimo.
La solución a este problema de minimización condicionada es:
W( )
C1 ( )
,
e H ( k )C1 ( )e( k )
(2.2.15)
que sustituida en (2.2.13) deja el estimador de potencia tal como se avanzó en (2.2.11) (ver
Zywicki, 1999 págs. 67 y 68 para una demostración de (2.2.15), en la que él usa la definición
w() W()e(k ) ).
En la Figura 2.2.2 se muestra una comparación entre el método de alta resolución y el método
convencional para datos reales tomados en Zushi (Japón) utilizando una pequeña array con
configuración de doble triángulo anidado (subfigura superior izquierda).
Figura 2.2.2. Ejemplo de procesado de un conjunto de datos común usando el método f-k de alta resolución (fila
- 40 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
superior) y el f-k convencional (fila inferior). Los detalles del procesado (ventaneo de la señal, suavizado, …) son
idénticos en ambos casos. Todas las gráficas están escaladas independientemente, usando azul oscuro para el
mínimo valor del estimador P en el rango mostrado y rojo para el máximo. Los datos corresponden a medidas de
componente vertical en Zushi (Japón) usando la array que se muestra. El software utilizado es de elaboración propia.
La respuesta de la array se muestra en la subfigura de la esquina inferior izquierda. Se usa una
implementación propia de los algoritmos HRFK y CVFK en Matlab® 6.5. Las seis figuras de la
derecha muestran los estimadores de potencia PHRFK (k, ) (fila superior) y PCVFK (k, ) (fila
inferior para tres frecuencias distintas). La mayor definición del vector número de onda lograda
con el método de alta resolución (para una misma frecuencia) es evidente.
2.2.3. LIMITACIONES DEL MÉTODO.
Como en todos los métodos de array, el rango de aplicabilidad del método f-k está limitado, tanto
a longitudes de onda largas como cortas, por el tamaño y la densidad de la antena sísmica
utilizada.
Limitaciones a longitud de onda corta: Aliasing espacial.
En el caso simple de incidencia de una única onda plana con velocidad finita se encontró que, a
una frecuencia dada la representación en (kx, ky) del estimador de potencia PCVFK(k, ) no es más
la respuesta de la array, Ptheo(k) afectada por una translación correspondiente al vector número de
onda que se quiere determinar. Desgraciadamente, la naturaleza periódica de Ptheo(k) hace que la
identificación del máximo principal (i. e. del pico en Ptheo(k=0)) en la representación de PCVFK(k,
) no sea unívoca. Esta multiplicidad de soluciones difícilmente discernibles se denomina
aliasing (podría decirse “aliasing en sentido estricto”, ya que en el Capítulo 3 se utilizará este
término en un sentido más amplio). El “periodo” de PCVFK(k, ) en el plano (kx, ky) crece (y por
tanto, la distancia entre picos equivalentes) conforme el espaciado típico entre sensores
disminuye. Por tanto, si la longitud de onda de la radiación incidente, ’=2/k’ (con k’ = |k’ |) es
grande en comparación con ese espaciado, podrá identificarse k’ como la posición del pico de
PCVFK(k, ) más cercano al origen de coordenadas. Un estudio más detallado muestra que la
longitud de onda mínima ’ min que puede usarse con seguridad depende de la distancia mínima
entre las proyecciones de las estaciones sobre la dirección de la onda, dmin, (y por tanto depende
de esa dirección) en concreto:
- 41 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
’ min 2 dmin ó k’min /d min
(2.2.16)
SESAME (2005) han elaborado un modo de aplicar este criterio sin conocer la dirección de
propagación predominante: i) se fija una dirección de propagación (acimut) y se calculan las
longitudes de las proyecciones sobre ésta de todos los segmentos posibles que unen parejas de
estaciones. ii) se repite la operación para el círculo completo variando el acimut con un intervalo
pequeños regular (p. e. de 5 en 5 grados), obteniendo una distribución conjunta de distancias. ii)
se calcula la distribución cumulada. La mediana de la distribución (distancia para la cual hay
tantas longitudes proyectadas mayores como menores) representa el valor límite de dmin
aconsejable que hay que sustituir en (2.2.16) para obtener el ’
min
global. SESAME (2005)
puntualizan que, si la array tiene forma de polígono regular, se puede tomar dmin 2 R/N.
Un criterio alternativo, basado en la forma de la respuesta de la array, Ptheo(k), consiste en tomar
k’max como la distancia (en el plano kx, ky) al pico más cercano al origen con amplitud 0.5 o
superior (se entiende, exceptuado el pico principal). Este pico secundario podrá ser confundido
con el principal.
Limitaciones a longitud de onda larga.
La anchura del lóbulo central de Ptheo(k) está controlada (inversamente) por la abertura de la
array. Una anchura grande aumenta la indeterminación en el número de onda calculado y limita
la aplicabilidad del método a longitudes de ondas largas, especialmente en el caso de campos con
alto grado de isotropía. En efecto, si el campo es aproximadamente isótropo el patrón de
PCVFK(k, ) está formado por una superposición de picos semejantes que rodean el origen de
coordenadas y cuya superposición, si la velocidad es suficientemente grande (k pequeños) o si
los picos individuales son suficientemente anchos, tendrá un máximo espurio en k 0 (velocidad
infinita). La longitud de onda máxima analizable, ’ max, es del orden de la distancia más grande
entre las proyecciones de las estaciones en la dirección de propagación. Si la array es un
polígono regular de radio R con suficientes vértices (a partir de un pentágono según SESAME,
2005) se puede tomar ’ max 2R. Si se utiliza el método HRFK, la longitud de onda máxima
puede multiplicarse por 3 (i. e. ’ max 6R, Tokimatsu, 1997; SESAME, 2005).
Un criterio alternativo, basado en la forma de Ptheo(k), consiste en tomar k’min como el (mayor)
valor de k para el que la respuesta de la array es 0.5 (a la mitad de la altura del máximo
principal), lo que proporciona una medida de la anchura del pico.
- 42 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
2.2.4. MÉTODO f-k ANTE ONDAS PLANAS CON DISTINTOS AZIMUTS Y FASES
CORRELACIONADAS.
Para que el análisis de ruido ambiental mediante el método f-k funcione óptimamente, es
favorable que las fases de las ondas planas procedentes de distintas direcciones que forman el
campo de ondas no estén correlacionadas. Esta condición se satisfará en los casos en que se
reciban ondas directas procedentes de fuentes no correlacionadas en el tiempo. Sin embargo, no
es difícil concebir situaciones en las que esta hipótesis falla (como cuando en el campo de
ondas coexistan ondas directas y ondas difractadas por irregularidades laterales, o esté
provocado por una fuente móvil, …) en las que el método ha de emplearse de forma muy
cuidadosa.
Para ilustrar este punto, consideremos la aplicación del método f-k convencional en el caso ideal
de una antena sísmica circular de radio R formada por un gran número de sensores
2
equiespaciados ( N ). En el límite, esta array tiene respuesta J 0 ( k R) , lo que corresponde
a un k’min =1.13/R según el criterio de la semianchura del pico a la amplitud 1/2 ó k’min =/R
según el criterio de la máxima distancia entre estaciones. Esta array hipotética no tendría, en
principio, problemas de aliasing (i. e. k’max= ) pues su función respuesta tiene un periodo
infinitamente largo (en el plano del número de onda) y no hay picos secundarios con amplitud
grande (amplitud 0.16 para el mayor). De la ecuación (2.2.9) obtenemos que el estimador de
potencia PCVFK viene dado, bajo incidencia de un conjunto de ondas planas, por:
1
PCVFK (k, ) / N = Al
l
N
2
donde se ha usado que
e
2
e
m
i k l ' k R cos( )
i ( k l ' k )R m
N
A J ( k ' k R )
l
0
l
2
,
(2.2.17)
l
d = 2 J 0 ( k l 'k R) . Se supondrá que k l ' =k’ (todas
las ondas incidentes tienen el mismo número de onda, aunque distinta dirección). Es fácil
comprobar que los máximos de (2.2.17) no ocurren necesariamente para números de onda
k con módulo k’. Supongamos, por ejemplo el caso particular de dos ondas planas
propagándose con número de onda k’ tal que k’R = 4 (k’ está por encima de k’min), una de ellas
con amplitud compleja unidad y dirección 0º y otra con cierto acimut y cierta fase como
amplitud compleja (el módulo de la amplitud se supone también unidad). Se comprueba en este
- 43 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
ejemplo que los máximos de PCVFK no ocurren exactamente en k’ = 4/ R. En la Figura 2.2.3
(izquierda) se ha hecho un barrido sobre los posibles valores de acimut y fase de la segunda
onda, aplicando CVFK a cada caso. Se ha localizado el valor máximo de PCVFK (k, ) en el
rango -6 < kj < 6 (j vale x o y). Concretamente, se han identificado todos los puntos en dicho
rango en que se excede el 95% del valor máximo (zonas negras en las tres subfiguras de la
derecha) y se ha obtenido la media de los módulos de los respectivos números de onda. En las
otras tres figuras se muestran casos particulares (marcados con asterisco en la subfigura
izquierda). En el primero, el método obtiene el número de onda correcto (los dos máximos
están sobre la circunferencia) y las direcciones de propagación correctas. En el segundo (ondas
que viajan en direcciones opuestas y en oposición de fase) se comete un error por exceso del
14% en el número de onda. En el tercer caso, las interferencias constructivas y destructivas
entre dos ondas viajando en fase y con una diferencia de acimuts de 50º dan lugar a un pico
espurio cerca del origen y con amplitud importante que invalida la medida, y a otro pico en el
acimut medio con número de onda algo infravalorado.
Esta dificultad ha sido tratada por varios autores (p. e. Woods and Lintz, 1973). Bokelmann and
Baisch (1999) llevaron a cabo un interesante intento para aminorar estos efectos, advirtiendo
que los términos relacionados con las ondas planas correlacionadas pueden disminuirse
promediando los elementos de C() correspondientes a parejas de estaciones con similar
distancia y orientación. Esta aproximación, aunque tiene limitaciones obvias en arrays con
pocas parejas de estaciones redundantes, ha sido usada en los trabajos de Goncalves (1999) y
Cornou et al. (2003).
Figura 2.2.3. A la izquierda, estimaciones del número de onda en el ejemplo descrito (ver texto) para distintas fases
y direcciones de incidencia de una de las ondas. El valor correcto es k’R=4. Tres figuras de la derecha: Estimador de
potencia CVFK para algunos casos particulares indicados con estrellas en la figura izquierda. Estas tres subfiguras
comparten la barra de color izquierda. El círculo indica el módulo del número de onda correcto. Las zonas negras
marcan las posiciones de los picos (valores de potencia que superan el 95% del máximo absoluto de cada caso).
- 44 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
2.3. INTERFEROMETRÍA SÍSMICA USANDO RUIDO AMBIENTAL. UNA VISIÓN
GENERAL.
La posibilidad de recuperar la función de Green elastodinámica entre dos puntos a partir de la
correlación en el dominio del tiempo de medidas de ruido ambiental simultáneas en ambos
emplazamientos fue confirmada experimentalmente por Shapiro and Campillo (2004).
Resultados similares han sido demostrados también en otras disciplinas científicas como la
acústica (Lobkis and Weaver, 2001) o la heliosismología (Duvall et al. 1993).
En el caso elastodinámico y si se establece en el medio un campo difuso y equiparticionado
U difuso(R, ) , la correlación entre los desplazamientos en los puntos RA y RB se relaciona con la
función de Green del medio mediante la expresión (p. e. Sánchez-Sesma and Campillo, 2006):
{s U difuso(R A , )}{v U difuso(R B , )}* 2ES k 3 ImGsv (R A , R B , ) ,
(2.3.1)
donde s y v son vectores unitarios cartesianos ( x̂ , ŷ , ẑ ); la función de Green Gsv (R A , R B , )
representan el desplazamiento registrado en R A y en la dirección s producido por una fuerza
armónica puntual en R B con expresión sv ( R R B ) exp(it ) , actuando en la dirección v;
k / es el número de onda S y ES 2 S 2 es la densidad de energía promedio de onda S.
La operación · representa un promedio entre distintas realizaciones del campo (ver Capítulo 3).
Varios estudios teóricos al respecto realizados en modelos simples (Sánchez-Sesma and
Campillo, 2006; Sánchez-Sesma et al., 2006, 2008 entre otros) indican que este resultado se
cumple bajo dos condiciones bastante restrictivas: i) que el campo de ondas sea aleatorio y
homogéneo, sin que existan direcciones de propagación privilegiadas, ii) que el campo se
encuentre en régimen difusivo, lo que implica que se satisfagan las relaciones entre las energías
de los distintos tipos de onda que se propagan en el medio que se derivan del principio de
equipartición (p. e., en el espacio completo 3D la relación entre las energías de las ondas S y P
ha de ser 2/ 2; ver Sánchez-Sesma and Campillo, 2006). Mientras que la uniformidad acimutal
del ruido ambiental a frecuencias superiores a 1Hz es incierta debido a su gran dependencia de
las fuentes de origen antrópico (p. e. Morikawa et al. 2004), esta hipótesis puede ser más
razonablemente satisfecha a frecuencias inferiores.
- 45 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Este método ha sido utilizado en los últimos años para generar imágenes tomográficas de la
distribución de velocidades de ondas Rayleigh en regiones extensas usando tiempos de registro
largos (de hasta varios años) y grandes redes permanentes de sismómetros de banda ancha. Su
implementación requiere el uso cuidadoso de diversas técnicas de análisis de señal (como
filtrado paso banda, ventaneo, normalización en el dominio del tiempo, blanqueado espectral,
apilamiento o stacking) para obtener correlaciones suficientemente estables y libres de efectos
de fuentes intensas muy localizadas (como terremotos). Una revisión de estos detalle prácticos
ha sido publicada por Bensen et al. (2007). Típicamente las correlaciones son después tratadas
con las técnicas convencionales de obtención de curvas de dispersión en velocidad de grupo
como filtrado múltiple (Dziewonski et al., 1969) o phase matched filter (Herrin and Goforth,
1977). Finalmente se procede a la inversión tomográfica del conjunto de curvas de dispersión.
Usando esta técnica, Sabra et al. (2005) exploraron la estructura cortical en el sur de California
para periodos de entre 5 y 10s usando datos de 148 estaciones de banda ancha. Desde entonces,
varios estudios más se han realizado en el territorio estadounidense. En el oeste de E.E.U.U. ha
sido aplicada por Moschetti et al. (2007) y Lin et al. (2008). Estos últimos incluyen imágenes
tomográficas para ondas Love, lo que no es común, entre 8 y 20s y utilizan un año de registro en
250 estaciones. El este ha sido tomografiado por Liang and Langston (2008) para ondas Rayleigh
de 5 y 15s.
En Asia y Oceanía, se pueden citar los estudios de la propagación de ondas Rayleigh entre 5 y
50s en Nueva Zelanda realizados por Lin et al. (2007) usando 42 sismómetros de banda ancha y
un año de registros. Behr et al. (2010) han estudiado la península de Northland (también en
Nueva Zelanda) con 5 sismómetros, extrayendo curvas de dispersión Rayleigh y Love e incluso
estimando el grado de anisotropía radial de la corteza (2-15%). El SE de Tibet ha sido
investigado por Yao et al. (2006, 2008) así como por Li et al. (2009 y 2010) en onda Rayleigh y
Love respectivamente. Una tomografía del continente australiano, con inversión de la estructura,
ha sido publicada recientemente por Saygin and Kennett (2010) para periodos ente 5s y 12.5s. La
península de Korea fue tomografiada a periodos más bajos (1-6s), incluyendo también resultados
para ondas Love, por Cho et al. (2007) combinando datos de banda ancha con acelerómetros.
Los autores también invierten los espesores de distintas capas corticales para una sección de la
península.
Yang et al. (2007) han realizado un estudio global de Europa para periodos entre 8 y 50s con
- 46 -
Técnicas exploratorias basadas en el estudio del ruido ambiental.
125 grabaciones de un año de duración. Entre los trabajos de más detalle en nuestro
continente podemos citar el de Gudmundsson et al. (2007), quienes han presentado su
aplicación en Islandia para periodos entre los 4 y 17s empleando dos años de registro. En
España, Villaseñor et al. (2007) han obtenido una tomografía de la península ibérica en
velocidades de grupo de ondas Rayleigh en periodos entre 8 y 25s usando la red sísmica
nacional.
Pueden encontrarse también algunas aplicaciones del método a menor escala espacial.
Brenguier et al. (2007) obtuvieron mapas de velocidad de grupo y un modelo 3D de
velocidad de onda S para el edificio volcánico del Piton de la Fournaise (Isla La Réunion,
Océano Índico), que se muestra en la Fig. 2.3.1. Algunos estudios pioneros apuntan a que la
detección de variaciones temporales en las funciones de Green experimentales (correlaciones
cruzadas) permitiría supervisar e incluso predecir erupciones volcánicas. Sus intensidades se
inferirían midiendo la inflación de los edificios volcánicos (Brenguier et al., 2008). Baptie
(2010) es escéptico en lo que se refiere a la capacidad predictiva, aunque consigue detectar
variaciones temporales tras episodios volcánicos. Las variaciones en las propiedades
elásticas tras terremotos importantes han sido también detectadas con este método pasivo
(e.g. Wegler et al. 2009).
- 47 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 2.3.1. modelo 3-D de velocidad de onda S para el volcán Piton de la Fournaise, mostrando seis cortes
horizontales a diferentes profundidades. La velocidad de onda S promedio se da en las etiquetas blancas. Las líneas
negras discontinuas a -0.5 km de profundidad muestran los límites de la zona del rift. Panel central, abajo: vista del
modelo 3-D. El cuerpo azul delimita una zona con perturbación de la velocidad del 2.5%. Derecha, abajo: mapa del
volcán Piton de la Fournaise, el primero estudiado con detalle usando Interferometría sísmica pasiva. Las estaciones
sísmicas se representan con triángulos invertidos. El rectángulo discontinuo Muestra los límites de las imágenes
tomográficas. Reproducida de Brenguier et al. (2007).
- 48 -
CAPÍTULO 3
MÉTODOS DE AUTOCORRELACIÓN ESPACIAL
Es comúnmente asumido, el origen de los métodos de autocorrelación espacial se puede situar en
los trabajos de Aki (1957, 1965). Además de lo ingenioso e innovador de su teoría, cabe destacar
el esfuerzo que supuso realizar el tratamiento de los registros de ruido ambiental hace más de 50
años, lo que lo llevó a desarrollar incluso la instrumentación necesaria. Traduciendo de Aki
(1957): “Las operaciones pueden llevarse a cabo manualmente, pero debería enfatizarse que las
molestas labores involucradas en las operaciones manuales hacen la aplicación de nuestro
método prácticamente imposible. El presente estudio ha sido posible gracias a la automatización
de las operaciones. De hecho, los estudios teóricos fueron iniciados tras acabar un computador
de correlaciones en nuestro laboratorio […]”.
Una contribución relevante fue la realizada 22 años después por Henstridge (1979), quien
presentó una reformulación y una extensión del tratamiento de Aki de la componente vertical. El
trabajo de Henstridge introduce una formulación matemática más moderna y adecuada,
planteando la representación espectral del microtremor, considerado como un proceso
estacionario, mediante una integral de Fourier-Stieltjes (p. e. Yaglom, 1962). Su análisis de
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Fourier-Bessel del desplazamiento vertical está en el origen de la presente tesis, en la que se
persigue su generalización a las componentes horizontales y a otras descripciones del campo.
También ha inspirado varias contribuciones recientes de otros autores (p.e. Cho et al., 2006b,
Tada et al., 2009).
Los métodos de autocorrelación espacial están emparentados con el método de recuperación de
la función de Green mediante correlación cruzada de registros de ruido que se ha aplicado
extensivamente en estos últimos años (esta relación ha sido discutida p. e. por Luzón et al.
2010). Bajo hipótesis de campo difuso (isótropo y con cierta distribución de energías ente los
distintos tipos de ondas), se puede demostrar (Wapenaar, 2004) la proporcionalidad entre la
correlación cruzada de los registros de dos estaciones y la función de Green elastodinámica entre
ellas, incluso para un medio heterogéneo arbitrario. Campillo and Paul (2003) han comprobado
experimentalmente este hecho utilizando coda grabada en estaciones de banda ancha instaladas
en Méjico. Aún así, el método de Aki y sus métodos afines conservan su utilidad, sobre todo en
aplicaciones a pequeña escala, por estar basados en hipótesis menos exigentes (menos propensas
a ser violadas en frecuencias dominadas por fuentes antrópicas) y requerir normalmente un
menor tiempo de grabación.
El objetivo de las siguientes secciones es desarrollar métodos que permitan estimar propiedades
del terreno, como son las curvas de dispersión de ondas Rayleigh y Love y la elipticidad de la
onda Rayleigh. En un segundo orden de prioridad, interesa también obtener propiedades del
campo como la energía relativa de los distintos tipos de ondas o verificar la independencia
estadística entre las ondas que viajan en distintas direcciones. Se tratará de dar a estas secciones
un carácter “integrador”, reformulando (y en algunos casos generalizando) los desarrollos
teóricos de otros autores para relacionarlos con los propios y con nuestro marco matemático.
3.1. APROXIMACIÓN DETERMINISTA VS. APROXIMACIÓN ESTOCÁSTICA
El primer paso es encontrar una forma apropiada de representar el campo de ondas. La mayoría
los trabajos teóricos sobre métodos de SPAC, parten de considerar al microtremor como un
campo aleatorio estacionario, esto es, un campo que se extiende indefinidamente en el espacio y
en el tiempo conservando ciertas propiedades estadísticas. Algunos de estos artículos dan
explícitamente una representación espectral del campo aleatorio (Henstridge, 1979; Okada, 2003,
2006; Cho et al. 2004, 2006b; Morikawa, 2006) que ha de interpretarse de modo probabilista
(sección 3.2.3).
- 50 -
Métodos de autocorrelación espacial.
Otro grupo de trabajos, parten de una formulación determinista del campo de desplazamientos,
en la que éste se escribe como la superposición de las ondas generadas por un conjunto finito de
fuentes (p. e., Lachet and Bard, 1994; García-Jerez et al., 2008a, 2008b). Ésta es la aproximación
habitual cuando se trata de simular numéricamente el microtremor y no es incompatible con que
los parámetros que definen las fuentes puedan haber sido elegidos de modo aleatorio siguiendo
cierta distribución de probabilidad. Estos parámetros pueden ser el tiempo en que se activa cada
fuente, su amplitud, posición y orientación.
Buena parte de los métodos disponibles en la literatura, así como todos los introducidos en esta
tesis son válidos aún cuando la zona de estudio esté iluminada mediante un conjunto finito
arbitrario de ondas planas (provenientes de una o varias fuentes que se activan durante intervalos
de tiempo finitos) entre las que podría haber dependencias en dirección, amplitud y/o fase. Esta
dependencia entre las ondas que forman el campo puede existir en condiciones reales. Sirva
como ejemplo el caso el campo de ondas generado por trenes que recorren una vía a cierta
velocidad. Otro caso de dependencia mutua se daría si conviven ondas incidentes y reflejadas por
algún cuerpo cercano a la array. Por último, es también intuitivo que las ondas Rayleigh y Love
procedentes de una misma fuente o de un grupo de fuentes situadas en una dirección y distancia
determinadas estén correlacionadas entre sí. En esta tesis, estas situaciones son consideradas (se
permiten) en la descripción determinista, pero no en la basada en procesos aleatorios
estacionarios.
En este trabajo se simultanean ambas descripciones del campo, si bien se da preferencia a la
descripción determinista a la hora de introducir los distintos métodos. Bajo las definiciones
concretas de ambos tipos de campos que se dan en la siguiente sección, todos los métodos que se
formulan en términos deterministas tienen translación al caso de campos aleatorios, pero no al
contrario. La formulación determinista, tal como se entiende aquí, es pues más exigente o
restrictiva.
3.2. REPRESENTACIÓN DEL CAMPO DE DESPLAZAMIENTOS.
El tratamiento determinista es la vía conceptualmente más sencilla de abordar la descripción del
campo de ondas que constituye el microtremor. Consiste en tratar el ruido ambiental como la
superposición de los frentes de ondas procedentes de un conjunto finito de fuentes que puedan
- 51 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
influir en el intervalo temporal que se analiza y en el entorno del punto de medida. La estrategia
general que seguiremos consistirá en i) suponer una distribución arbitraria de fuentes
superficiales, que puede estar sujeta a ciertas restricciones (típicamente, ausencia de fuentes
cercanas a la array) y ii) a partir de las expresiones del campo en los puntos situados sobre una o
varias circunferencias, tratar de definir operaciones entre los registros que conduzcan a obtener
(“despejar”) cantidades relacionadas de modo sencillo con las propiedades del suelo (velocidades
de fase principalmente). Por lo general, tales cantidades serán independientes de la configuración
de las fuentes sólo bajo la hipótesis de array infinitamente densa (y ni aún así si coexisten
múltiples modos en el campo).
3.2.1. REPRESENTACIÓN MEDIANTE UNA SUMA DETERMINISTA DE ONDAS
PLANAS
Se utilizarán los resultados de Harkrider (1963), que proporcionan las expresiones de los
desplazamientos y esfuerzos en superficie debidos a una fuente puntual j de amplitud
L j ( ) L jH ( )eˆ Lj L jV ( ) zˆ que actúa en una estructura de capas plano-paralelas isótropas.
Aquellas expresiones nos permiten ahora escribir el campo completo U compl (R, ) generado por
un conjunto arbitrario de M fuentes puntuales y registrado en una estación en superficie con
posición R como el producto matricial:
M
U compl (R, ) [ xˆ, yˆ , zˆ] T ( r )[S 0r, j , S 0, j , S 0, j ]T
(3.2.1)
j
j 1
En esta expresión, S0r, j (R), S0, j (R) y S0, j (R) representan las componentes radial, tangencial y
vertical del desplazamiento generado por la fuente j-ésima en la estación R , situada en
superficie, r j R d j es el vector de posición de la estación respecto a la proyección en el
plano horizontal de la fuente j –ésima (Fig. 3.2.1), x es la coordenada acimutal de un vector x
cualquiera en el sistema de referencia xˆ, yˆ , zˆ, con ẑ orientado hacia arriba ( tan a a·yˆ / a·xˆ ), y
la matriz T ( ) proporciona un cambio de base que corrige el sentido de los ejes para dar signo
positivo al movimiento hacia arriba y los rota hasta obtener coordenadas en el sistema cartesiano
xˆ, yˆ , zˆ:
cos
T ( ) = sin
0
sin
cos
0
- 52 -
0 1 0
0
0 0 1 0
1 0 0 1
(3.2.2)
Métodos de autocorrelación espacial.
Como es sabido, la ecuación (3.2.1) tiene una validez bastante general. Remplazando la
sumatoria sobre las fuentes a una integración, puede representar también los campos creados por
fuentes extensas o difractados por irregularidades con forma arbitraria.
Dada la relativa complejidad de la representación anterior, y a la luz de las consideraciones sobre
la naturaleza del ruido ambiental expuestas en el Capítulo 1 parece conveniente realizar una
idealización del microtremor que retenga sólo sus características fundamentales y tratar aparte
los efectos de las desviaciones respecto al comportamiento ideal. En nuestro tratamiento
determinista, las premisas a hacer sobre el campo serán las siguientes:
i)
El microtremor está dominado por las ondas superficiales.
ii)
Éstas muestran un modo claramente predominante para cada frecuencia y tipo de onda
(Rayleigh o Love).
iii)
Las fuentes o difractores de estas ondas están lo suficientemente alejados de la array
sísmica como para que los frentes de onda se propaguen como ondas planas a lo largo de ésta.
La condición i) nos permite prescindir de las ondas de cuerpo, evitándonos las integraciones a lo
largo de los cortes de rama y conservando sólo la suma modal que constituye la parte de ondas
superficiales de la función de Green. En este caso, las contribuciones a S 0r, j (R) , S 0, j (R) y
S 0, j (R) asociadas a cada modo, tipo de onda y componente de la fuente vienen dadas por las
expresiones (103), (134) y (137) de Harkrider (1964).
La condición ii) supone asumir que, para cada frecuencia, existe un término en la suma modal
con energía significativamente mayor que la de la suma del resto de los modos (si los hay). En
aquellos esquemas en que se haga uso de las componentes horizontales y verticales del
microtremor, se asumirá además que el campo de ondas Rayleigh está dominado por un mismo
modo en ambas componentes. Denominaremos k R ( ω ) y kL ( ω ) a los números de onda de los
modos predominantes Rayleigh y Love respectivamente, como funciones de la frecuencia
angular ω .
La condición iii) la imponemos sustituyendo los factores dependientes de r en las funciones de
- 53 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Green (básicamente argumentos de funciones de Hankel en las variables k R rj y k L rj ) por una
aproximación asintótica adecuada. Considerando que la distancia de la fuente al origen de
coordenadas, inmerso en la array, es mucho mayor que la longitud de onda, y que k X R
permanece acotado cuando k X d j (X = R o L), tenemos:
H n( 2) (k X d 2j R 2 2 Rd j cos( j ) ) ~
2
e
k X d j
i ( k X d j k X R cos( j )
n
)
2 4
, k X d j . (3.2.3a)
Además, en estas condiciones podemos aproximar:
r ~ j , cos( j ) ~ cos( j L ) y sin( j ) ~ sin( j L ) .
j
j
j
(3.2.3b)
Figura 3.2.1. Disposición de los vectores LjH, dj , rj, así como del vector de posición de la estación R y diversos
vectores unitarios.
El término exp( i k X R cos( j )) en (3.2.3a) es el responsable de las diferencias de fase entre
las grabaciones en las distintas estaciones de las ondas causadas por la fuente j-ésima.
Ahora podemos resumir el resto de los factores que intervienen en la función de Green mediante
unas amplitudes vectoriales complejas A HV
y A Lj asociadas a las ondas Rayleigh y Love
Rj
respectivamente:
- 54 -
Métodos de autocorrelación espacial.
i
A HV
Rj ( ) ARj ( )
e j zˆ ,
(3.2.4)
A Lj ( ) ALj ( ) zˆ e j .
(3.2.5)
Si las fuentes del campo son superficiales, ARj y ALj vienen dados por:
i ( k R d j )
i ( k R d j )
L
L
2
2
4
4
ARj = V R
e
i H R
e
cos( j L ) ,
j
2
k R d j
2
k R d j
(3.2.6)
ALj = i
i ( k L d j )
LH
2
4
L
e
sin( j L ) ,
j
2
k L d j
(3.2.7)
mientras que si no lo son, se necesita incorporar un factor que de cuenta de la profundidad de
estas (ver Harkrider 1963, 1964). En cualquier caso, la ecuación (3.2.1), queda aproximada en
términos de ondas planas armónicas como:
M
U(R, ) A HV
Rj ( ) exp (ik R ( ) e j R ) A Lj ( ) exp (ik L ( ) e j R ) .
j 1
(3.2.8)
En (3.2.6-7), los símbolos , R y L representan, respectivamente, la elipticidad y las
respuestas del medio para el modo predominante de ondas Rayleigh y Love, tal como fueron
definidas por Harkrider (1964), sin ningún cambio de signo adicional. Estas tres cantidades son
funciones de y de las características de la estructura. La ecuación (3.2.4) da cuenta de que la
trayectoria de una partícula bajo la acción de una onda Rayleigh está confinada en el plano
vertical que contiene a la dirección de propagación. Como el cociente entre las componentes
horizontal y vertical de la amplitud compleja de ondas Rayleigh es una cantidad puramente
imaginaria, el movimiento de las partículas sigue una trayectoria circular o elipse recta. Por
conveniencia, utilizaremos a veces la notación ARjV
iARj j , con la que (3.2.4) queda
V
ˆ . Por su parte, la ecuación (3.2.5) limita los
simplemente como A HV
Rj ( ) ARj ( )e j ARj ( ) z
desplazamientos asociados a las ondas Love a la componente horizontal perpendicular a la
dirección de propagación. La versión en el dominio del tiempo de la expresión (3.2.8) será
representada con una u minúscula:
- 55 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
1
u( R, t )
2
e
i t
U(R, )d .
(3.2.9)
Si se deseara abandonar la hipótesis (ii) permitiendo la coexistencia de múltiples modos a cada
frecuencia, habría que incluir sendas sumas modales sobre los índices de modo Rayleigh y Love
en (3.2.8). Las cantidades k R , y R necesitarían un índice extra corriendo sobre el modo
Rayleigh, mientras que k L y L dependerían del modo de onda Love.
3.2.2. EXPANSIÓN EN SERIE DE FOURIER DE LAS COMPONENTES VERTICAL,
RADIAL Y TANGENCIAL DEL MOVIMIENTO EN FUNCIÓN DE LA COORDENADA
AZIMUTAL
Si se dispusiera de registros en tres componentes del campo de ondas a lo largo de todos los
puntos Re situados sobre una circunferencia de radio R , se podrían definir, en una ventana
temporal dada, tres funciones representando las componentes vertical, radial y tangencial del
movimiento variando con la coordenada acimutal. Estas serían:
W ( R, , ) zˆ U( Re , )
(3.2.10)
U rad ( R , , ) e U( Re , )
(3.2.11)
U tg ( R, , ) ( zˆ e ) U( Re , )
(3.2.12)
Sus versiones temporales w ( R, , t ) , u rad ( R, , t ) y u tg ( R, , t ) se obtienen trivialmente por
transformación inversa de Fourier o, equivalentemente, sustituyendo U( Re , ) por u( Re , t ) en
las definiciones anteriores. Estas funciones son continuas y derivables si se supone que el campo
de ondas viene expresado por las ecuaciones (3.2.8-9) y pueden expandirse en serie de Fourier
sobre la coordenada acimutal :
1
2
X ( R, , )
X
m
m
( R, )
(3.2.13)
siendo
X m ( R, )
exp(im ) X ( R, , )d ,
- 56 -
(3.2.14)
Métodos de autocorrelación espacial.
con X
representando W , U rad o U tg . En el dominio temporal, xm ( R, t ) se escribe
exp(im ) x( R, , t )d .
Los coeficientes de estas series de Fourier pueden relacionarse con las propiedades de las ondas
superficiales que se quieren determinar, como son la elipticidad de la onda Rayleigh y las
velocidades de fase de ondas Rayleigh y Love. Si se sustituye la forma del campo (3.2.8) en las
definiciones (3.2.10-12) y se utiliza la representación integral de la función de Bessel de orden
n , Jn( x ) :
exp( in ix cos ( ))d 2 ( i )
n
exp( in )J n ( x )
(3.2.15)
podemos obtener las siguientes expresiones teóricas simples que ligan esos coeficientes con las
propiedades del campo (García-Jerez et al. 2006b, 2008b):
Wm ( R, ) = 2 ( i )m ARV ,m J m ( xR ) ,
(3.2.16)
U mrad ( R , ) = (i) m1ARm J m1 ( xR ) J m1 ( xR ) + (i) m ALm J m1 ( x L ) J m1 ( x L ) , (3.2.17)
U mtg ( R , ) = (i) m ARm J m1 ( xR ) J m1 ( xR ) + ( i )m1ALm J m1( xL ) J m1( xL ) . (3.2.18)
Por simplicidad, se han definido aquí xR ( ) kR ( )R , xL ( ) kL ( )R , y los coeficientes
complejos (suma de amplitudes pesadas) ARm y ALm como:
M
ARm ( ) exp( im j )ARj ( ) .
(3.2.19)
j 1
M
A ( ) exp( im j ) ALj ( ) .
m
L
j 1
En algunos casos, se utilizará el símbolo ARV ,m como abreviatura de iARm :
- 57 -
(3.2.20)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
M
ARV ,m iARm exp( im j )ARjV ( ) .
(3.2.21)
j 1
Las cantidades ARm ( ) y ALm ( ) pueden interpretarse como los coeficientes m-ésimos del
M
desarrollo en serie de Fourier de las expresiones
AR, j ( ) ( j ) y
j 1
M
A
j 1
L, j
( ) ( j ) ,
respectivamente, donde (·) representa la delta de Dirac. Bajo esta óptica, el conjunto de ondas
planas es considerado como el caso límite de una superposición de M haces estrechos centrados
en j (j = 1, 2, …, M) y formados por ondas en fase caracterizadas por una elevada “densidad
acimutal de amplitud compleja”. Las expresiones (3.2.16 – 20) serán la base de los métodos de
exploración sísmica pasiva desarrollados en las secciones posteriores.
3.2.3. DESCRIPCIÓN DEL MICROTREMOR MEDIANTE CAMPOS ALEATORIOS
ESTACIONARIOS.
Hasta este punto, se han estudiado las componentes del campo como funciones del azimut,
basándonos en una descripción determinista de este y se han obtenido las expresiones de los
coeficientes de sus respectivas series de Fourier respecto a la variable acimutal. A continuación,
se introducirá la descripción estadística del campo en la que este será tratado como un proceso
aleatorio estacionario. Esta descripción nos permitirá capturar las características propias del
microtremor que lo diferencian de las demás señales sísmicas y obviar elementos secundarios
que dificultan el análisis. Clásicamente el microtremor es tratado de este modo (Aki; 1957,
Henstridge, 1979). La amplia teoría sobre este tipo de entidades matemáticas ha sido descrita por
Yaglom (1062) o Priestley (1981) entre muchos otros. En concreto, los aspectos teóricos de la
teoría de procesos estacionarios multivariados y multidimensionales puede encontrarse en la obra
de Priestley (1981, pp. 655 y ss., pp. 718 y ss.). A continuación se van a introducir brevemente
sólo aquellos elementos que tendrán posteriormente utilidad directa. Se definirán las densidades
espectrales de potencia frecuencia-dirección del campo, como funciones de la frecuencia y del
azimut, así como sus componentes de Fourier. Asimismo, daremos las definiciones de
autocorrelación, correlación cruzada, densidad espectral de potencia y densidad espectral
cruzada entre formas de onda concretas y su generalización al caso de procesos aleatorios
estacionarios. Los elementos citados constituyen la base de la mayoría de las formulaciones de
métodos de tipo SPAC, si bien, en esta tesis se tratan más bien como elementos auxiliares.
- 58 -
Métodos de autocorrelación espacial.
Proceso aleatorio. Realizaciones del campo.
En la descripción mediante procesos aleatorios, el campo queda representado por una
colectividad (un conjunto) de funciones de 3 en 3 que dan el desplazamiento tridimensional
de cada punto del suelo en función de su posición en el plano (superficie libre) y del tiempo.
Cada una de estas funciones es denominada realización del proceso aleatorio. Las distintas
realizaciones pueden considerarse como los diferentes resultados posibles de un experimento (la
grabación del campo) que es repetido una y otra vez en condiciones similares. Cada realización
tiene asociada una cierta probabilidad (o densidad de probabilidad) de ocurrencia. Por la propia
naturaleza del microtremor, estas realizaciones (o, al menos, las que tienen probabilidad de
ocurrencia apreciable) tienen una duración temporal infinita.
Valor esperado. Media nula. Estacionaridad.
Si F(·) es una operación definida sobre toda realización del proceso, definimos su valor
esperado,
F , como el promedio ponderado de los valores de F sobre el conjunto de
realizaciones. El valor de F para cada realización ha de ser pesado por la probabilidad de que
aparezca ésta.
Una vez definido el valor esperado, podemos ya expresar algunas propiedades estadísticas que
razonablemente ha de cumplir el microtremor:
i) Para cualquier posición y tiempo, la distribución de valores de cualquiera de las componentes
de movimiento tendrá media nula. Esto se puede expresar x(R, t ) 0 , con x = w, urad o utg.
Las realizaciones, tienen por tanto signos equiprobables. Dada la limitación en los equipos de
grabación, la corrección de línea base de los registros puede ser necesaria para que se
satisfaga esta hipótesis en la práctica.
ii) x(R, t ) y(R a, t ) es independiente de t y de R. Aquí, x e y toman valores x̂ · u, ŷ · u o
ẑ · u (componentes cartesianas del desplazamiento), mientras que a y representan
translaciones arbitrarias en el plano horizontal y en el tiempo, respectivamente. Esta es
relación es una consecuencia directa de la naturaleza estacionaria, en el espacio y en el
tiempo, que se asume para el microtremor e indica que los momentos de orden dos de las
- 59 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
variables aleatorias x(R, t ) e y(R' , t ' ) sólo dependen de la distancia espacial y temporal entre
ellas y no de las posiciones y tiempos absolutos.
Representación espectral. Condición de independencia estadística.
La teoría determinista desarrollada anteriormente y que condujo a las ecuaciones (3.2.8-9) ha de
ser reformulada para conseguir definir una representación espectral del proceso aleatorio
estacionario matemáticamente adecuada. Las mencionadas ecuaciones eran válidas para un
campo generado por un número finito de fuentes de duración finita, situadas en un conjunto
finito de acimuts y no incluye ninguna relación estadística entre ellas. En la descripción mediante
campos aleatorios estacionarios se evitará de momento vincular el campo a sus fuentes o a la
estructura del suelo, absteniéndonos de prescribir formas concretas a las realizaciones (tal como
se hizo en las Ecs. 3.2.4-8). La única hipótesis en este sentido es que cada “componente
espectral” se propaga a una velocidad bien definida (la velocidad de fase es una función de ).
Expresaremos, en primer lugar u p.a. (R, t ) , con p. a. significando proceso aleatorio, como la
suma de dos procesos estadísticamente independientes vinculados a las ondas Rayleigh y a las
ondas Love respectivamente:
u p.a. (R, t ) u Rp.a. (R, t ) u Lp.a. (R, t ) .
(3.2.22)
Aplicando la teoría espectral de procesos aleatorios estacionarios y teniendo en cuenta las
polarizaciones de ambos tipos de ondas, podemos escribir las siguientes representaciones
espectrales:
u Rp.a. (R, t )
exp (i t ik
R
( )e R)dζ HV
R ( , ) ,
(3.2.23)
L
( ) e R)dζ L ( , ) ,
(3.2.24)
u Lp.a. (R, t )
exp (i t ik
HV
donde dζ HV
R , j ( , ) y dζ R , j ( , ) tienen las siguientes expresiones:
i
dζ HV
R ( , ) d R ( , )
e ( ) zˆ
(3.2.25)
dζ L (, ) d L (, )zˆ e .
(3.2.26)
El sentido de las integraciones en las expresiones (3.2.23-24), que son de tipo Riemann-Stieltjes,
se explica con más detalle en el Apéndice III.A. Las funciones ζ R (, ) y L (, ) se
- 60 -
Métodos de autocorrelación espacial.
denominan “espectros integrados” o “medidas espectrales” (p.e. Yaglom, 1962). Cada realización
del proceso u p.a. (R, t ) tiene sus correspondientes ζ R (, ) y L (, ) (generalmente distintos a
los de las otras realizaciones) de modo que ζ R (, ) y L (, ) son también procesos aleatorios,
aunque generalmente no estacionarios.
Los procesos ζ R (, ) y L (, ) cumplen las propiedades:
(i) d R (, ) d L (, ) 0, ,
(3.2.27)
(ii) d X* ( , )d Y ( ' , ' ) XY ( ' ) ( ' ) f X ( , )d d ' d d '
(3.2.28)
La primera relación es consecuencia de que el proceso tenga media nula (Prietsley, 1981, p. 249).
La segunda indica que X ( , ) es un proceso de incrementos ortogonales e integra la hipótesis
de que las ondas Rayleigh y Love están descritas por procesos estadísticamente independientes.
Las funciones reales f L (, ) y f R (, ) se denominan densidades espectrales frecuenciadirección de las ondas Love y de las componentes horizontales de ondas Rayleigh,
respectivamente. Una vez multiplicadas por d d , estas cantidades reales representan las
potencias de las ondas planas que se propagan hacia azimuts en el rango a d con
frecuencias de a d .
Comparando ahora (3.2.4-5) y (3.2.8) con las ecuaciones (3.2.22-26) queda claro que las
amplitudes complejas ARj ( )
y ALj ( ) juegan, en la descripción determinista, un papel
semejante al de los incrementos R y L en la descripción por campos aleatorios. De hecho,
se puede concluir que el campo aleatorio estacionario puede considerarse como un caso límite (,
M’) de una colección de realizaciones deterministas formadas cada una por M’ ondas planas
equiespaciadas en acimut cuyas señales se anulan fuera del intervalo[-/2 /2] y cuyas
amplitudes complejas cumplen las propiedades:
AX , j (l ; ) 0 ,
1
AX , j (l ; ) AY* ,k (m ; ) XY jk lm f
2
- 61 -
(3.2.29)
X
, .
(3.2.30)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
El símbolo representa el límite , M’, l, m. Esta correspondencia se
establece de manera más rigurosa en el Apéndice III.A. Finalmente, admitimos que las ondas de
distinto tipo (Rayleigh y Love) así como las provenientes de dos direcciones distintas son
estadísticamente independientes. Consecuentemente, las variables aleatorias AX , j (l ; ) y
AY ,k (m; ) serán estadísticamente independientes si X Y ó j k.
Ergodicidad
Aunque la definición matemática del proceso estocástico tiene pleno sentido, estrictamente
hablando sólo se tiene acceso experimental a una de sus realizaciones (y de modo parcial, ya que
no se dispone de registros temporales de duración infinita). La propiedad de ergodicidad
significa que los valores esperados de los operadores que se definen sobre las realizaciones
pueden obtenerse mediante un promedio temporal a lo largo de una realización cualquiera. Una
definición general de este concepto puede verse en McDonough and Whalen (1995, p. 50). En la
práctica, para calcular el valor esperado de un operador, se suele realizar un promedio sobre un
conjunto de ventanas temporales (fragmentos de la señal) suficientemente largas (e idealmente,
aisladas) como modo de aproximar · . Cada ventana se comportaría como una realización del
proceso. La ergodicidad del microtremor se presume implícitamente en, prácticamente, toda la
T
1
·dt y ChavezT 2T
T
literatura al respecto. Por ejemplo, Okada (2006) usa directamente · lim
García et al. (2005) hacen explícita la hipótesis de ergodicidad, tratando de investigar su validez.
En lo que sigue, se admitirá que el microtremor es ergódico, asumiendo que los valores
esperados en la colectividad pueden aproximarse por promedios sobre un número suficiente de
ventanas suficientemente largas.
3.2.4.
DENSIDADES
ESPECTRALES,
CORRELACIÓN
CRUZADA
Y
AUTOCORRELACIÓN.
En la sección anterior se definieron las densidades espectrales de potencia frecuencia-dirección
de las componentes Rayleigh y Love del microtremor cuando es tratado como proceso aleatorio
estacionario (denominadas f R (, ) y f R (, ) , respectivamente). En virtud de las ecuaciones
(3.2.8), (3.2.10) y (3.2.29) podemos obtener, por ejemplo, que el valor esperado del módulo
cuadrado del registro vertical en frecuencias en la estación central W (0, ; ) está relacionado
con la integral azimutal de f R (, ) :
- 62 -
Métodos de autocorrelación espacial.
W (0, ; )
2
2
1
f R ( , )d
( )
2
(3.2.31)
El miembro derecho representa claramente la densidad espectral de potencia total del proceso
Rayleigh que registra el observador, incluyendo las contribuciones de todas las fuentes. En
general, dada una función temporal x(t; ) que se anula fuera de [-/2 +/2] se puede definir su
densidad de potencia espectral como X (; ) X * (; ) (2 ) . La operación análoga entre dos
formas de onda distintas x(t; ) e y(t; ) es X (; )Y * (; ) (2 ) y se denomina densidad
espectral cruzada. Ambas definiciones se extienden directamente a procesos aleatorios tomando
valores esperados y el límite de longitud infinita de la ventana. En tal caso, se utilizarán los
símbolos Gx ( ) y Gxy ( ) para la densidad de potencia espectral y densidad espectral cruzada.
Gx ( ) lim
Gxy ( ) lim
X (; )
2
2
X (; )Y * (; )
.
2
(3.2.32)
(3.2.33)
El punto de partida de los métodos desarrollados en esta tesis es la transformada de Fourier de
los registros restringidos a una ventana de duración suficientemente grande. Sin embargo,
muchos autores plantean un tratamiento temporal de las señales, que resulta equivalente, en
función de la autocorrelación y de la correlación cruzada entre éstas. Estas operaciones se
definen a continuación.
La correlación cruzada entre dos señales x(t , ) , y(t; ) se define como la integral:
x( s; ) y * ( s t; )ds ,
(3.2.34)
que es nula fuera del intervalo [- ]. Se demuestra, a partir del teorema de convolución, que la
densidad espectral cruzada entre ambas señales es básicamente la transformada de Fourier de la
correlación cruzada (normalizada por ):
X (; )Y * (; )
1
1
F x( s; ) y * ( s t; )ds
2
2
- 63 -
(3.2.35)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Como caso particular, obtenemos la relación entre densidad de potencia espectral y la
autocorrelación de la señal x(t , ) :
X (; )
2
2
1
1
F
2
x( s; ) x* ( s t; )ds
(3.2.36)
De nuevo, las definiciones de autocorrelación y la correlación cruzada se pueden extender a
procesos aleatorios estacionarios sin más que tomar el valor esperado en la colectividad y el
límite . La relación de sus transformadas con la densidad de potencia espectral y la
densidad espectral cruzada se escribe entonces:
Gx ( )
1
1
F lim x( s; ) x* ( s t; )ds] ,
2
(3.2.37)
Gxy ( )
1
1
F lim x( s; ) y * ( s t; )ds .
2
(3.2.38)
y
En la literatura pueden encontrarse otras definiciones ligeramente diferentes para la correlación
cruzada y para la densidad espectral cruzada. En particular, es frecuente definir la primera como
x* ( s; ) y( s t; )ds y la segunda como X (; ) * Y (; ) . En ese caso, se obtiene la
igualdad entre la transformada de la primera y la segunda sin necesidad de la normalización por
2 (nótese que F f * (t ) F f (t ) ). Cho et al. (2006b) usan una definición de G x, y (; T )
*
conjugada respecto a la usada aquí (debido a la diferente definición de la transformada de
Fourier).
Para terminar esta sección, se introducen una serie de definiciones que contribuirán a aligerar la
notación en lo que resta del capítulo:
S XY ( R1 , 1 , R2 , 2 , ; ) identifica el producto entre la transformada de Fourier de la
componente X del movimiento y el conjugado de la Y (X, Y toman valores W, Urad, Utg), para
estaciones con coordenadas polares (R1,1) y (R2,2):
S XY ( R1 , 1 , R2 , 2 , ; ) X ( R1 , 1 , ; )Y * ( R2 , 2 , ; ) .
En el caso particular en que coincidan los acimuts y las componentes, abreviamos como:
- 64 -
(3.2.39)
Métodos de autocorrelación espacial.
S X ( R1 , R2 , , ; ) S XX ( R1 , , R2 , , ; ) X ( R1 , , ; ) X * ( R2 , , ; ) .
1
También definiremos su media acimutal (
2
1
S X ( R1 , R2 , ; )
2
(3.2.40)
d ) como:
S
X
( R1 , R2 , , ; )d
(3.2.41)
La densidad espectral cruzada entre las componente X, Y de las estaciones (R1,1) y (R2,2) se
abrevia como:
G XY ( R1 , 1 , R2 , 2 , ) Gx ( R1 ,1 ,t ), y ( R2 ,2 ,t ) ( ) lim
S XY ( R1 , 1 , R2 , 2 , ; )
.
2
(3.2.42)
En la siguiente sección se usará también la notación GX mY n ( R1 , R2 , ) , para referirse la densidad
espectral cruzada entre los coeficientes de Fourier de órdenes m y n de x( R1 , , t )
y
y( R2 , , t ) (ver bajo 3.2.14).
3.2.5. COEFICIENTES DE FOURIER DE LAS DENSIDADES ESPECTRALES. RELACIÓN
CON EL CASO DETERMINISTA.
Los coeficientes de orden m del desarrollo en serie de Fourier de las densidades espectrales,
f mL ( ) y f mR ( ) , se definen como:
f mX ( ) e im f X ( , )d ,
(3.2.43)
con X = R o L. Por el carácter real de f
X
, se tiene inmediatamente que
f Xm f mX * . En
caso de campo de ondas isótropo, f 0X será el único coeficiente no nulo.
Cuando un campo aleatorio se expresa como caso límite de un campo determinista (Sección
3.2.3), se pueden establecer las siguientes correspondencias entre los valores esperados de los
productos AXm AYn* y ATj AXl AYm* AZn* y los coeficientes de Fourier de las densidades espectrales
frecuencia-dirección (Apéndice III.B):
- 65 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
lim
lim
1
4
2 2
1
2
AXm AYn* XY f mXn ,
(3.2.44)
ATj AXl AYm* AZn* TY XZ f jTm f l Xn TZ XY f jTn f l Xm ,
(3.2.45)
donde j, l, m, n son números enteros, mientras que T, X, Y y Z valen R o L. La notación ij
representa la delta de Kronecker. Como se verá más adelante, la ecuación (3.2.44) juega un papel
importante en la mayoría de formulaciones de métodos tipo SPAC (por ejemplo, es el análogo
de la ecuación 53 del artículo de Cho et al. 2006b). Por otra parte, aunque la ecuación (3.2.45) no
tiene análogo en las derivaciones estándar, será una relación fundamental para la translación de
uno de los nuevos métodos (método SCA) al contexto de los campos aleatorios estacionarios. La
demostración de (3.2.45) ha sido también desarrollada en el Apéndice III.B.
3.3.
MÉTODO
DE
AUTOCORRELACIÓN
ESPACIAL
ENTRE
COMPONENTES
VERTICALES (v-SPAC)
Como se ha indicado, el método de la autocorrelación espacial para análisis de ruido ambiental
(SPAC) se basa en el trabajo de Aki (1957) en el que se proponen varios procedimientos distintos
para el cálculo de velocidades de fase de ondas superficiales. El más trascendente, dada su
relativa simplicidad y la generalidad en las hipótesis de partida es aquel en que se emplean
registros de componente vertical obtenidos en varios sensores situados a lo largo de una
circunferencia y otro en el centro de ésta. Este método será denominado v-SPAC (vertical SPAC)
en lo sucesivo. Para recuperarlo a partir de la aproximación determinista presentada antes, basta
con tomar el cociente entre W0 ( R , ) y W0 ( 0 , ) (i. e. entre el coeficiente de orden cero del
desarrollo en serie de Fourier de la componente vertical a lo largo de una circunferencia de radio
R y el valor de dicha magnitud en su centro). Esta operación permite cancelar la dependencia en
ARV 0 que aparece en el miembro derecho de (3.2.16):
V
W0 ( R, )
= J 0 ( k R ( ω )R ) ,
W0 (0, )
(3.3.1)
donde se ha usado que J 0 ( 0 ) 1 . Llamaremos a este cociente “coeficiente de v-SPAC”. Las
diferencias entre esta derivación y el desarrollo original de Aki (1957) serán tratadas en la
siguiente subsección. Nótese que W0 ( R , ) no es más que el promedio acimutal de los registros
verticales, en el dominio de la frecuencia, tomados en una array infinitamente densa desplegada
a lo largo de la circunferencia de radio R. Una ilustración del funcionamiento del método en el
- 66 -
Métodos de autocorrelación espacial.
dominio del tiempo se muestra en la figura 3.3.1 para el caso de una array hexagonal. En ella
representan los registros temporales generados por dos ondas planas monocromáticas que se
desplazan hacia la derecha con distintas longitudes de onda (se supone una frecuencia común
1/T). Por simplicidad, ambas ondas tienen la misma amplitud y fase, de modo que los registros
en el centro de la array son idénticos. El promedio de los registros periféricos es también
armónico (Fig. 3.3.1c) pero con una amplitud dependiente de la longitud de onda. Abajo se
muestra cómo la amplitud normalizada está relacionada con el cociente R/ mediante la función
de Bessel J0.
Figura 3.3.1 Método v-SPAC usando una array “circular” con siete sensores en el caso de incidencia de una única
onda plana Rayleigh desde la izquierda. (a) Ejemplo de onda plana armónica con periodo arbitrario T propagándose
hacia la derecha. La línea continua corresponde a una onda con longitud de onda 5R, donde R es el radio de la array.
El caso de longitud de onda 2R se representa mediante una línea discontinua. Ambas gráficas (alternativas)
corresponden a un tiempo fijo. (b) Posibles registros en las estaciones de la array para una ventana temporal común
para las dos ondas descritas (manteniendo el tipo de línea). Por simplicidad, suponemos fases tales que el registro en
la estación central, que se muestra mediante una línea punteada, sea común para los dos casos. Los desfases
temporales respecto a la estación central, acordes con /T, se señalan en la parte superior de las ventanas. (c) Media
azimuthal de los registros para los casos = 5R (línea continua) y = 2R (línea discontinua). Las longitudes de
onda (o velocidades) respectivas pueden obtenerse del cociente entre las amplitudes del promedio acimutal y la de la
estación central (línea punteada). Ese cociente está relacionado con la longitud de onda mediante la función de
Bessel J0 (tomado de García-Jerez et al. 2008a).
- 67 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
La expresión (3.3.1) se ha deducido de la formulación determinista. Sin embargo, en la
aplicación práctica al microtremor conviene analizar un conjunto de fragmentos del registro
(digamos, de duración cada uno) y realizar algún tipo de promedio. El utilizar registros de
duración finita introduce inevitablemente errores estocásticos o incertidumbre en los valores V
que varían con la frecuencia. La magnitud de estos errores depende de cómo los datos sean
ventaneados, procesados y promediados. A continuación se discuten varias formas de realizar
estos promedios:
i) Tomar el promedio de los cocientes W0 ( R, ; ) W0 (0, ; ) calculados independientemente
para un conjunto de ventanas (i.e. W0 ( R, ; ) W0 (0, ; ) ). Ésta no es la opción más estable
pero puede resultar suficiente en muchas aplicaciones. Esta implementación permite obtener un
conjunto de estimaciones del coeficiente de v-SPAC a las que se les puede calcular directamente
su desviación típica. También permite identificar mejor (y eliminar si es necesario) porciones del
registro que provoquen resultados anómalos. Por otra parte, al no estabilizar el numerador y el
denominador antes de calcular el cociente, se compromete la robustez del método. El incluir un
suavizado previo de los espectros puede mejorar esta situación.
ii) Una opción más robusta es el cálculo de W0 (0, ; )W0* ( R, ; )
W0 (0, ; )
2
. De este
modo el numerador y el denominador son estabilizados previamente. La superioridad de esta
opción ha sido confirmada por Cho et al. (2007). Sin embargo, esta forma de calcular no es
adecuada para estimar experimentalmente la incertidumbre en el resultado. Por ejemplo,
desviaciones típicas grandes del numerador y del denominador pueden revelar variaciones en la
potencia del microtremor durante la medida y, al ser variaciones dependientes, no resultar
adecuadas
para
estimar
W0 (0, ; )W0* ( R, ; )
las
W0 (0, ; )
incertidumbres
2
en
el
cociente.
El
cociente
se puede reescribir, a partir de las definiciones (3.2.14)
y (3.2.40), quedando esta alternativa a (3.3.1) como:
o como
SW (0, R, ; )
SW (0,0, ; )
SWW (0,0, R, , ; )
SW (0,0,0, ; )
d = J 0 ( k R ( ω )R ) ,
.
- 68 -
(3.3.2)
Métodos de autocorrelación espacial.
iii) Si la longitud del registro es suficiente, una vía intermedia entre i) y ii) puede resultar la
mejor opción. Se trataría de dividir el sismograma en un conjunto de porciones mayores que son
a su vez ventaneadas más finamente. La aproximación mencionada en el punto ii) sería aplicada
para cada porción mayor produciendo un grupo de estimaciones estables del coeficiente de
SPAC que serán promediadas finalmente permitiendo la evaluación de la dispersión estadística.
Otra solución muy interesante, ha sido propuesta recientemente por Cho et al. (2007). Estos
autores proponen un modelo estadístico para estimar teóricamente la incertidumbre en el
coeficiente de SPAC, el cual se podría entonces determinar con la operación más estable
W0 (0, ; )W0* ( R, ; )
W0 (0, ; )
2
. La desviación típica modelada depende de los valores
del numerador y del denominador, del número de segmentos promediados, de las características
de la ventana temporal aplicada y de las del suavizado espectral.
iv) Si el campo de ondas es estacionario en el espacio y en el tiempo, puede resultar favorable
calcular:
1
2
SWW (0,0, R, , ; )
SW (0,0,0, ; ) SW ( R, R, , ; )
d .
(3.3.3)
La equivalencia entre las distintas expresiones es inmediata ya que
SW ( R, R, , ; )
son
iguales
bajo
estas
hipótesis
SW (0,0,0, ; )
(más
y
precisamente,
SW ( R, R, , ; ) (2 ) f 0R ( ) / 2 ( ) , independiente de la posición R de la estación). La
superioridad práctica de la segunda expresión radica en que es insensible a las diferencias de
ganancia entre las estaciones (i. e. a un factor multiplicativo real dependiente de la estación).
3.3.1. FORMULACIONES “EQUIVALENTES” DEL MÉTODO v-SPAC
Existen algunas formulaciones alternativas del SPAC con algunas ligeras diferencias respecto a
la expuesta anteriormente. A continuación se comentan dos de ellas: la debida a Aki (1957, 1965)
y la introducida por Cho et al. (2006b).
La formulación original (Aki, 1965) parte el cálculo de la “función espacio-correlación”
( R, ; ) a partir de registros, en el dominio del tiempo, filtrados entorno a la frecuencia :
( R, ; ) lim
1
T
w(0,0, t; )w( R, , t; )dt
0
- 69 -
(3.3.4)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
En realidad, ( R, ; ) es el valor a tiempo cero de la correlación entre la señal registrada en el
centro y la registrada en ( R, ) , una vez filtradas. Denominando (0,0; ) al resultado de la
operación anterior cuando relaciona el registro central consigo mismo y promediando ( R, ; )
en el azimut, se define el coeficiente de v-SPAC:
VAki ( R, )
1
( R, , )d .
2(0,0, )
(3.3.5)
Obviamente, VAki ( R, ) es una cantidad real. Aki (1965) demuestra que el resultado teórico es
también J 0 ( k R ( ω )R ) . En su formalismo, el método permanece válido si la array es
semicircular, sin más que cambiar los límites de integración en (3.3.5) al intervalo [0 ] y
sustituir 2 por en la normalización. En la sección 3.3.3 se dan más detalles a este respecto.
Una reformulación de este método ligeramente distinta a la expuesta aquí puede encontrarse en
el trabajo de Cho et al. (2006b). Su punto de partida es el cálculo de la integral acimutal de los
registros temporales tomados en la circunferencia, lo que en nuestra nomenclatura se escribe
w0 ( R, t ) . Seguidamente se calcula la densidad espectral cruzada entre esta función y la
correspondiente a una array de radio cero (esto es, entre w0 (0, t ) 2 w(0, t ) y w0 ( R, t ) ). Y
finalmente, se define el coeficiente de SPAC como el cociente:
VCho
GW 0W 0 (0, R, )
GW 0W 0 (0,0, )
.
(3.3.6)
Por simplicidad, se ha utilizado la notación GW 0W 0 (0, R, ) como un sustituto de
Gw0 ( 0,t ) ,w0 ( R,t ) ( ) . La correspondencia entre VCho y J 0 ( k R ( ω )R ) se demuestra de forma sencilla
a partir de (3.2.16) y de la definición de densidad espectral cruzada. El numerador de (3.3.6) es:
ARV ,0 (; )
W0 (0, ; )W0* ( R, ; )
2
GW 0W 0 (0, R, ) lim
= 4 J 0 ( xR ) lim
2
2
= 4 2 J 0 ( xR ) f 0R / 2 ,
2
=
(3.3.7)
de donde se sigue (3.3.6) inmediatamente. GW 0W 0 (0, R, ) corresponde, en límite , a la
- 70 -
Métodos de autocorrelación espacial.
operación 2 SWW (0,0, R, , ; ) ya que sólo supone alterar el orden en que se realizan la
transformada de Fourier y el promedio acimutal. Por tanto, la Ec. (3.3.6) recoge esencialmente
el mismo cálculo que (3.3.2).
Cho et al. han empleado las densidades espectrales cruzadas entre promedios acimutales de
registros para el desarrollo de varias técnicas más, algunas de las cuales serán comentadas
posteriormente. Estos autores extienden la notación GW 0W 0 (0, R, ) al caso de dos componentes
cualesquiera x, y (tomando valores w, urad, utg), y para dos componentes de serie de Fourier
cualesquiera m, n y dos radios R1, R2, según:
GX mY n ( R1 , R2 , ) Gxm ( R1 ,t ) yn ( R2 ,t ) ( ) .
(3.3.8)
3.3.2 EFECTOS DEL ALIASING ACIMUTAL EN LOS MÉTODOS TIPO SPAC
El método v-SPAC ha sido obtenido bajo la suposición de que el coeficiente de orden cero del
desarrollo en serie de Fourier de la componente vertical W0 ( R , ) puede ser calculado
apropiadamente de forma experimental. Sin embargo, este hecho es incierto desde el momento
en que está definido a partir de una integración a lo largo de la coordenada acimutal (Ec. 3.2.14).
Como cualquier array “circular” realista está compuesta por un número muy limitado de
sensores, será necesario hallar el mejor modo de aproximar el valor de W0 ( R , ) , así como
evaluar los posibles errores que se derivan de tal aproximación. A estos errores nos referiremos
como “efectos de N finito” o “efectos de aliasing acimutal”. Este problema aparecerá de nuevo
en secciones posteriores también para las otras componentes del movimiento (radial y
tangencial) y para otros órdenes del desarrollo en serie de Fourier, por lo que en este epígrafe se
hará un planteamiento general.
Concretando los términos del problema, se trataría de obtener un algoritmo que permita
aproximar simultáneamente un conjunto de coeficientes de Fourier, que estaban definidos como
X m ( R, )
exp(im ) X ( R, , )d
con m entero, empleando medidas en un conjunto finito
de acimuts. Cabe esperar que los coeficientes de órdenes |m| bajos puedan ser estimados con
mayor exactitud a partir de un número limitado de estaciones, de modo que en los métodos
desarrollados en este capítulo se explotarán sólo los casos m = -1, 0, 1. Podemos considerar por
tanto que estamos interesados en aproximar solamente los 2K+1 coeficientes de órdenes
~
menores: -K m K. Construimos sus respectivos estimadores X m ( R, ) como combinaciones
- 71 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
lineales de los registros obtenidos en los distintos azimuts,
N
~
X m ( R, ) em1 K , j X ( R, j , ) ;
m entero, -K m K,
(3.3.9)
j 1
donde los coeficientes e p ,q tienen, en principio, valores desconocidos y las cantidades 1 , 2 , …,
j , …, N representan los acimuts de las estaciones sobre la circunferencia.
Se puede demostrar (p. e. Cho et al. 2006b) que los e pq han de ser óptimamente escogidos como
1
los elementos (p, q) de la matriz H H , donde pq
1
exp(i(q K 1) p ) ; p = 1, 2,
2
…, N; q = 1, 2, …, 2K+1. La condición impuesta en esta optimización consiste en que la
K
evaluación de la serie de Fourier truncada
~
exp(im ) X
m K
m
( R, ) en los azimuts de las
estaciones dé un conjunto de N valores próximos, en el sentido de diferencia cuadrática media, a
las transformadas de Fourier de los registros originales:
N
j 1
X ( R, j , )
1
2
K
~
exp(im j ) X m ( R, )
2
es mínimo.
(3.3.10)
m K
En el caso de que 2K+1 = N, la matriz es cuadrada, N N. Si, además, es invertible,
1
entonces H H = 1 . Por último, si los sensores están equiespaciados, podemos
suponerles coordenadas acimutales j = 2j / N , j = 1, 2, …, N
y la matriz 1 queda
(Apéndice III.C):
1 jk
2
exp( 2i( j 1 K )k / N ) ,
N
(3.3.11)
y de aquí:
2
~
X m ( R, )
N
N
exp(im2j / N ) X ( R,2j / N , ) ,
j 1
N impar ,
. (3.3.12)
m ( N 1) / 2
El resultado es además el modo “natural” de estimar X m ( R, ) . La distribución de sensores
equiespaciados será prácticamente la única considerada en el resto de esta memoria.
Por simplicidad, definiremos en general:
- 72 -
Métodos de autocorrelación espacial.
2
Xˆ m ( R, )
N
N
exp(im2j / N ) X ( R,2j / N , ) ,
(3.3.13)
j 1
y lo usaremos en la práctica como estimador de X m ( R, ) en cualquier array circular con
sensores uniformemente distribuidos y para cualesquiera valores de m y N.
Es muy útil expresar los estimadores X̂ m ( R , ) en función de los coeficientes exactos del
desarrollo en serie de Fourier de la componente X . Se demuestra inmediatamente (Apéndice
III.D) que, para el caso de estaciones equiespaciadas, se tiene:
X̂ m ( R , )
X
k
m kN
( R, ) ,
(3.3.14)
es decir, la diferencia entre el estimador del coeficiente de orden m y el valor que se obtendría
para una array infinitamente densa se puede escribir como la suma de los coeficientes de Fourier
de órdenes m + k N, con k = 1, 2, 3, … Esta expresión va a ser la vía para introducir los
efectos de N- finito en todos los métodos desarrollados en esta memoria. Otros autores (eg.
Okada 2006, Shabani et al. 2010) consiguen resultados equivalentes basándose en la relación de
Jacobi-Anger:
exp irk cos( )
i
n
n
J n (kr) exp in ( ) .
(3.3.15)
3.3.3. EFECTOS DEL ALIASING ACIMUTAL EN El MÉTODO v-SPAC
A partir de (3.3.14), se puede construir el estimador del coeficiente de v-SPAC afectado por
efectos de N-finito en una array circular de estaciones equiespaciadas. Siguiendo (3.3.13), se
usará también el acento circunflejo ^ para referirse a coeficientes de correlación afectados por
aliasing acimutal. Recurriendo a (3.2.16) tenemos:
̂V
Ŵ0 ( R , )
[ AV , jN ARV , jN ]
J 0 ( xR ) (i) jN J jN ( xR ) R
.
ARV ,0
Ŵ0 ( 0 , )
j 1
(3.3.16)
Usando (3.2.19), la expresión anterior se puede escribir también en función de las amplitudes de
las ondas planas incidentes:
- 73 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
M
̂V J 0 ( xR ) 2 (i) J jN ( xR )
jN
j 1
A
q 1
cos jN q
V
Rq
M
A
q 1
.
(3.3.17)
V
Rq
A continuación, se analizarán algunos casos en los que esta suma presenta comportamientos
sencillos:
Ondas planas procedentes de un solo azimut
En caso de que las ondas planas incidan en una sola dirección , la ecuación anterior queda:
̂V J 0 ( xR ) 2 (i) jN J jN ( xR ) cos jN .
(3.3.18)
j 1
Observando el factor (i) jN , se advierte que los sumandos con jN par corresponden a la parte
real del resultado, mientras que jN impar identifica a los sumandos imaginarios. Por tanto, si
N es impar, las partes real e imaginaria provienen de sumar a índices pares e impares,
respectivamente:
ReˆV ( R, ) J 0 ( xR ) 2 (i ) 2 jN J 2 jN ( xR ) cos 2 jN
j 1
,
( 2 j 1) N
i ImˆV ( R, ) 2 (i )
J ( 2 j 1) N ( xR ) cos(2 j 1) N
j 1
N impar
(3.3.19)
mientras que, si N es par, la parte imaginaria es nula y todos los sumandos contribuyen a la parte
real. En este último caso, podemos reescribir (3.3.18) en función del entero N / 2 :
Re ˆV ( R, ) J 0 ( xR ) 2 (i)
j 1
2j
N
2
J
ImˆV ( R, ) 0
N
2j
2
( xR ) cos 2 j
N
2 ,
N par.
(3.3.20)
La comparación entre las líneas superiores de (3.3.19) y (3.3.20) nos muestra que, si N es par
pero no múltiplo de cuatro (es decir, con N /2 impar), la array de N estaciones es indistinguible
de la de N /2 a efectos del cálculo de Reˆ ( R, ) y bajo el campo unidireccional.
Aliasing acimutal en la descripción como proceso aleatorio estacionario
La adaptación de (3.3.16) a la descripción del campo como proceso aleatorio estacionario se
- 74 -
Métodos de autocorrelación espacial.
puede obtener fácilmente a partir de la relación (3.2.44). Calculemos primero el producto
Wˆ0 (0, ; ) Wˆ0* ( R, ; ) (de 3.3.16):
Wˆ0 (0, ; ) Wˆ0* ( R, ; ) 4 2 ARV ,0 ARV ,0* J 0 ( xR ) 4 2 i jN J jN ( xR )[ ARV ,0 ARV , jN * ARV ,0 ARV , jN * ] .
j 1
(3.3.21)
En el límite de ventana temporal larga, tenemos, utilizando (3.2.44):
f RjN f jNR
fR
Wˆ (0, ; )Wˆ0* ( R, ; )
= 4 2 02 J 0 ( xR ) 4 2 i jN J jN ( xR )
,
GˆW 0W 0 (0, R, ) lim 0
2
2
j 1
(3.3.22)
y dividiendo por la densidad espectral de potencia para el caso de radio cero:
ˆVCho ( R, )
Gˆ W 0W 0 (0, R, )
Re[ f RjN f jNR ]
.
J 0 ( xR ) 2 i jN J jN ( xR )
f 0R
Gˆ
(0,0, )
j 1
(3.3.23)
W 0W 0
Como en el caso unidireccional, los términos de la sumatoria son reales o imaginarios puros
dependiendo de si jN es par o impar, lo que indica un comportamiento similar al de dicho caso.
Separando las partes real e imaginaria para los casos de N impar y N par, tenemos,
respectivamente:
Re[ f R2 jN f 2RjN ]
f 0R
j 1
,
R
R
Re[ f ( 2 j 1) N f ( 2 j 1) N ]
Cho
( 2 j 1) N
i Im[ ˆV ( R, )] 2 i
J ( 2 j 1) N ( xR )
f 0R
j 1
Re[ ˆVCho ( R, )] J 0 ( xR ) 2 i 2 jN J 2 jN ( xR )
Re[ ˆVCho ( R, )] J 0 ( xR ) 2 i
j 1
2j
N
2
Re[ f R
2 j
J
Im[ ˆ
N
2
Cho
V
2j
( xR )
( R, )] 0
N impar ,
f R N ]
2j
2
R
, N par.
f0
N
2
(3.3.24)
(3.3.25)
De modo que, como en el caso del campo unidireccional, las arrays de N y de N /2 sensores
son indistinguibles, en lo que se refiere al resultado de Re[ ˆVCho ( R, )] , si N es par pero no
múltiplo de cuatro. Este resultado ha sido demostrado por Okada (2006).
La anulación de la parte imaginaria en cualquier array con N par puede utilizarse como de una
comprobación de las hipótesis de estacionaridad espacial del campo. El montaje más sencillo
para este fin sería una línea de tres sensores equiespaciados (N = 2). Las densidades espectrales
- 75 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
cruzadas entre los sensores situados en los extremos y el sensor central, i. e. Gw(0,t ,0), w( R,t , ) ( ) y
Gw( 0,t ,0), w( R,t , ) ( ) , han de resultar mutuamente conjugadas para que se cancelen las partes
imaginarias de ˆVCho ( R, ) . Efectivamente, cualquiera de estas dos parejas se transforma en la
otra mediante una translación (que dejaría invariante la densidad espectral cruzada) y una
reordenación de los sensores (que provoca la conjugación). Si experimentalmente se encuentra
que ambas cantidades difieren significativamente (aparte de en la conjugación), se debe
cuestionar el cumplimiento de las hipótesis de campo estacionario y posiblemente descartar los
métodos que hacen uso de ellas (es el caso, por ejemplo, del método 2s-SPAC y del método
CCA, descritos en el epígrafe siguiente).
Esta relación directa (conjugación) entre las densidades espectrales cruzadas calculadas entre la
estación central y dos estaciones diametralmente opuestas comporta la redundancia entre ellas,
que está detrás de las equivalencias señaladas para arrays con N par no divisible por 4 en campo
estacionario, e implica además que cualquier array con N par es equivalente, en términos de
Re[ ˆVCho ( R, )] , a una array semicircular. Esta situación se ejemplifica en la Fig. 3.3.2 (atiéndase
en este punto solamente a las componentes verticales).
Figura 3.3.2. Ejemplo de dos arrays regulares con un número par de sensores a lo largo de la circunferencia (6 a la
izquierda y 8 a la derecha). En cada caso se pretenden resaltar dos conjuntos de estaciones: las estaciones pintadas
de rojo y las estaciones punteadas (independientemente del color). Ambos conjuntos son equivalentes a la array
completa (y por tanto también equivalentes entre sí) ya que sólo eliminan estaciones diametralmente opuestas a las
consideradas. Tanto la array hexagonal como la octogonal tienen subarrays semicirculares equivalentes (las
punteadas). La array hexagonal es equivalente a una array triangular (regular), por ser el número de vértices doble
- 76 -
Métodos de autocorrelación espacial.
de un impar. La array octogonal no es equivalente a una array cuadrada aunque sí a otras distribuciones irregulares
de cuatro vértices. Las mencionadas equivalencias entre arrays sólo se tienen bajo ciertas hipótesis (ver texto).
Las expresiones (3.3.24-25), como sus análogas deterministas, no permiten corregir los efectos
de N finito en la práctica, ya que las cantidades f nR ( ) suelen ser desconocidas, pero sí son de
utilidad para acotar tales efectos. Una primera conclusión es que, a medida que la iluminación
sea más uniforme (en función del azimut), será posible disminuir el número de estaciones en la
array. Si la iluminación es completamente uniforme, f 0R ( ) es el único coeficiente de Fourier de
f R (, ) no nulo y tendremos ˆVCho ( R, ) J 0 ( xR ) para cualquier N (esto es, ausencia de
efectos de N finito). Otra conclusión inmediata es que los efectos de N finito son despreciables
para valores de x R suficientemente bajos (es decir, para longitudes de onda suficientemente
grandes en comparación al radio), lo que generalmente corresponde también a frecuencias por
debajo de cierto umbral (dependiente del radio y de la curva de dispersión concreta). Esto es
evidente a partir de las expresiones anteriores, ya que todas las funciones de Bessel de órdenes
distintos de cero convergen a cero cuando lo hace su argumento ( J n ( xR ) 0 cuando xR 0
para n 0), prevaleciendo entonces la dependencia en J 0 ( xR ) (Figura 3.3.3). El rango en el cual
los efectos de N finito son pequeños debe, grosso modo, (con las salvedades hechas para N par)
ampliarse conforme crece el número de estaciones, ya que la expresión de las desviaciones de
ˆVCho ( R, ) respecto a VCho ( R, ) involucrará cada vez a funciones de Bessel de órdenes
mayores, que tienen menos influencia para x R bajo (Figura 3.3.3).
Figura 3.3.3. Funciones de Bessel de distintos órdenes.
- 77 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Okada (2006) ha evaluado detalladamente los umbrales de x R por debajo de los cuales las
desviaciones de ˆVCho ( R, ) respecto al caso N = son menores de 0.01, aún cuando las ondas
provengan de las direcciones más desfavorables. Estos valores límite de xR se muestran en la
figura 3.3.4. Se observa en ella la prevista tendencia creciente con el número de estaciones, una
menor capacidad de las arrays con N par, así como la equivalencia entre arrays con N impar y sus
correspondientes arrays con N doble (3 y 6; 5 y 10), siempre bajo las hipótesis de campo
estacionario o unidireccional. En esta figura también se representan los umbrales para una
desviación de 0.05 determinados por Cho et al. (2007).
Figura 3.3.4. Valores máximos de x R para los que las desviaciones en los coeficientes de SPAC debidas a efectos
de N finito se mantienen por debajo de 0.01 (cuadrados, Okada 2006) o de 0.05 (círculos, Cho et al. 2007).
Si se relajan la hipótesis de campo arbitrario y se admite que la iluminación ha de tener una
anchura azimutal apreciable, el rango de validez del método aumenta. Por ejemplo, Asten (2006)
muestra, mediante simulaciones, que el uso del v-SPAC con arrays triangulares da buenos
resultados hasta el primer mínimo de J 0 ( xR ) (esto es, hasta xR = 3.83) si el microtremor
proviene de un intervalo acimutal de anchura igual o mayor que 30º. Cho et al. (2007) han
calculado el ancho acimutal necesario para mantener estos errores por debajo de 0.05 en un
rango de números de onda amplio: xR 20 (Fig. 3.3.5). El uso de una única pareja de estaciones
en todo este rango (N=1) requeriría un ancho total de 270º; la array triangular requiere 90º
mientras que la pentagonal 50º.
- 78 -
Métodos de autocorrelación espacial.
3.3.4 OTRAS VARIANTES DEL MÉTODO v-SPAC Y MÉTODOS RELACIONADOS.
A continuación se mencionan dos implementaciones particulares del método v-SPAC así como
otros dos métodos estrechamente relaccionados con él:
Morikawa et al. (2004) discutieron una implementación del método v-SPAC en la que sólo
trabajan simultáneamente dos estaciones. Se trata simplemente de evaluar (3.3.3) a partir de
parejas de registros simultáneos entre la estación central y una estación periférica móvil. Las
medidas se repiten cambiando la posición de esta última y finalmente se realiza el promedio
acimutal. Los requerimientos materiales se reducen así considerablemente (pues sólo dos
estaciones son necesarias) aunque el tiempo de grabación se multiplica por N. La estacionaridad
temporal del microtremor juega un papel esencial para que esta aproximación sea válida.
Figura 3.3.5. Anchura mínima del haz necesario para mantener la desviación en el coeficiente de SPAC por debajo
de 0.05 hasta xR =20 (según Cho et al., 2007). Se asume una dependencia triangular de la densidad espectral de
potencia frecuencia-dirección respecto al azimut.
Chávez-García et al. (2005) explotaron una propiedad empírica ya observada por Aki (1957),
mostrando que el promedio acimutal podría ser completamente evitado, bajo las hipótesis de
isotropía y estacionaridad espacio-temporal del ruido ambiental, si se usan registros
suficientemente largos. Este método es un caso particular del v-SPAC para N=1. Una pareja de
estaciones y una única medida (larga) serían suficientes. Conforme a los resultados expuestos al
final de la sección anterior, la condición de isotropía debe cumplirse con suficiente aproximación
para que este método sea viable en un rango amplio de longitudes de onda. En la literatura
pueden encontrarse numerosas situaciones en que esta condición se vulnera y el campo presenta
- 79 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
una o unas pocas direcciones privilegiadas (p.e. Endrun, 2010). Un ejemplo con datos propios se
muestra en la Fig. 3.3.6.
Bettig et al. (2001) llevaron a cabo una modificación de naturaleza algo mayor del método con
objeto de poder tratar arrays irregulares densas. Su esquema es denominado a veces “método
modificado de autocorrelación espacial para la componente vertical” o v-MSPAC. Básicamente
consiste en reemplazar las integraciones del movimiento vertical a lo largo de una circunferencia
por el valor medio en un anillo.
Figura 3.3.6. Ejemplos de coeficientes de v-SPAC grabados en una array pentagonal situada en las proximidades
(~50m) de una fuente puntual de ruido (una excavadora cargando un camión de arena). Las líneas coloreadas
muestran correlaciones entre distintas parejas de sensores, todas espaciadas 38m entre sí. Las líneas negras muestran
la media y la desviación típica. Se aprecia la gran disparidad entre las líneas coloreadas debida a la diferente
orientación de las parejas respecto a la dirección a la fuente, que estaba situada aproximadamente sobre una
perpendicular a la línea definida por la pareja en amarillo y que pasa por el centro de la array. El promedio sí está
menos afectado por efectos de N finito, presentando una similitud razonable con una función del tipo J0(kR R).
Tomando la formulación determinista, llamando R1 al radio interior del anillo y R2 al exterior y
usando (3.2.16), el valor medio de W ( R, , ) en el área del anillo resulta:
R
R
2
2
2 ARV ,0
1
1
W
(
R
,
,
)
R
dRd
W
(
R
,
)
R
dR
( R22 R12 ) R1
( R22 R12 ) R1 0
R22 R12
- 80 -
R2
R J
R1
0
(k R R)dR
Métodos de autocorrelación espacial.
2 AV ,0
2 2R 2
k R R2 R1
k R R2
x R J 0 ( xR )dxR
k R R1
2 ARV ,0
J1 (k R R2 ) R2 J1 (k R R1 ) R1
k R ( R22 R12 )
(3.3.26)
donde se ha usado que
x2
x J
( x)dx x J1 ( x)x12 .
x
0
(3.3.27)
x1
Normalizando por W0 (0, ) /( 2 ) W (0,0, ) ARV ,0 tendríamos ya una ecuación útil:
R
2
1
W ( R, , ) RdRd
( R22 R12 ) R1
W0 (0,0, )
2
J1 (k R R2 ) R2 J1 (k R R1 ) R1 ,
k R ( R R12 )
2
2
(3.3.28)
que en el contexto de campos aleatorios estacionarios, (3.3.28) se puede reescribir de la forma:
R
2
GWW (0,0, R, , )
1
RdRd =
2
2
( R2 R1 ) R1 GWW (0,0,0,0, )
2
J1 (k R R2 ) R2 J1 (k R R1 ) R1 .
k R R R12
2
2
(3.3.29)
Esta ecuación permite nuevamente el uso de una array semicircular cambiando la integración
entre - y + del miembro derecho por dos veces la integral entre 0 y +.
El procedimiento a seguir en la práctica, consistiría en definir sobre la array irregular una
“estación central” y un conjunto de anillos concéntricos en torno a ella a los que aplicar el
método separadamente. Los anillos habrían de ser tan delgados como fuera posible y deberían
contener un conjunto de estaciones que muestreen suficientemente la coordenada acimutal. Si las
estaciones en el anillo se identifican por sus coordenadas polares ( R j , j ), j = 1, 2, …, N, y se
ordenan por azimuth creciente ( j j 1 ), podemos aproximar el miembro izquierdo de (3.3.29)
por la expresión:
1
( R R12 )
2
2
j t .q .
R1 R j R2
Re GWW (0,0, R j , j , )
GWW (0,0,0,0, )
- 81 -
R R
j
j
(3.3.30)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
donde j
j 1 j
2
j j 1
2
j 1 j 1
2
y R R2 R1 . De este modo, se está pesando
cada estación (aproximadamente) por las dimensiones de una celda asociada en la que ésta ocupa
el azimut central (ver esquema en Fig. 3.3.7 para una array semicircular).
Figura 3.3.7. Representación esquemática del modo de pesado de las estaciones en el método v-MSPAC. Las
estaciones en rojo pertenecen al anillo definido. El área de la zona en gris es proporcional al peso que se da a la
densidad espectral cruzada entre la estación central y la estación señalada (Rj j).
La ecuación determinista (3.3.28) se puede aproximar de un modo paralelo. Si el anillo es
delgado, se puede tomar ahora R j R
1
( R R12 )
2
2
j t .q.
R1 R j R2
GWW (0,0, R j , j , )
GWW (0,0,0,0, )
( R2 R1 )
( R 2 R12 )
( R2 R1 ) 2
y por tanto:
2
2
1
2
R j R j
j t .q .
R1 R j R2
GWW (0,0, R j , j , )
GWW (0,0,0,0, )
j
(3.3.31)
que suele ser el cálculo realizado en la práctica.
Cho et al. (2004, 2006a) han desarrollado un método alternativo al v-SPAC, denominado CCA
(Centerless Circular Array). Se trata de una interesante aproximación que permite prescindir de
la estación central, pero que tiene la particularidad de no ser válida en general para un campo
determinista. Para introducirlo, observamos que a partir de (3.2.16) se deduce:
W0 ( R, )
2
W1 ( R, )
2
AR0 AR0* J 02 ( xR )
.
AR1 AR1* J12 ( xR )
- 82 -
(3.3.32)
Métodos de autocorrelación espacial.
La dependencia en los promedios de amplitudes pesadas hace que esta relación sea inútil en el
contexto determinista. Sin embargo, si pasamos al campo aleatorio estacionario siguiendo
(3.2.44), y observando (3.2.16) obtenemos:
Wm ( R, ; )
2
2
4
2
f 0R ( ) 2
ARV ,m (; ) ARV ,m* (; ) 2
J m ( xR ) 2
J ( x ) GWmWm ( R, )
2
( ) m R
(3.3.33)
de modo que, dividiendo el caso m=0 entre el caso m=1 de (3.3.33), obtenemos finalmente la
ecuación útil:
CCA
GW 0W 0 ( R, ) J 02 ( xR )
.
GW 1W 1 ( R, ) J12 ( xR )
(3.3.34)
La independencia estadística entre las ondas Rayleigh provenientes de distintas direcciones en el
contexto de campos aleatorios es una condición esencial para la validez de (3.3.34). La
estabilidad de esta ecuación ante distintas causas de errores experimentales ha sido estudiada por
Cho et al. (2006a).
3.4. MÉTODO DE AUTOCORRELACIÓN ESPACIAL DE LAS COMPONENTES
HORIZONTALES (3c – SPAC)
Varios estudios teóricos demuestran que la inversión de la estructura superficial de la corteza
arroja resultados más precisos si se usan conjuntamente velocidades de ondas Rayleigh y Love.
Por ejemplo, Pei (2007) ha mostrado que la inclusión de las velocidades de onda Love resulta en
una mejora significativa del modelo invertido, en términos de resolución de zonas de baja
velocidad y de contrastes altos. La velocidad de onda Love es sensible un menor de número
parámetros elásticos, lo que conlleva un procedimiento de inversión más simple. El primer
método tipo SPAC formulado que permite el estudio de las propiedades de las ondas Love es
descrito a continuación haciendo hincapié en el nuevo punto de vista determinista.
3.4.1. DESCRIPCIÓN DEL MÉTODO. FORMULACIÓN DETERMINISTA.
El método SPAC para las tres componentes (3c-SPAC) permite el cálculo de curvas de dispersión
de ondas Rayleigh y Love a partir de microtremor medidos en una array circular (o semicircular)
con estación central. La autoría de este método es algo controvertida. Fue esbozado por Aki
(1957) bajo la hipótesis de dominancia de las ondas Rayleigh o de las ondas Love en la
- 83 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
componente horizontal del microtremor, omitiendo por tanto las ecuaciones necesarias para el
caso general de coexistencia de ambas, que se atribuyen a Okada and Matsushima (1989). Un
texto más accesible en el que se trata este método es el de Okada (2003). Morikawa (2006) ha
publicado recientemente una derivación matemática más detallada.
Aunque todos los trabajos citados se basan en la descripción del microtremor como proceso
estocástico, se ha demostrado (García-Jerez et al. 2008b) que este método también se deduce
directamente de nuestra interpretación determinista contenida en (3.2.8-9), evitando además la
hipótesis de independencia estadística entre las ondas Rayleigh y Love requerida en la
demostración original y obteniendo una interpretación adicional de la parte compleja de los
coeficientes de correlación involucrados. De este modo, las ecuaciones que definen la técnica
son las siguientes:
V J 0 ( xR ) ,
(3.4.1)
rad () J 0 ( xR ) J 2 ( xR )' () J 0 ( xL ) J 2 ( xL )1 ' () ,
(3.4.2)
tg () J 0 ( xR ) J 2 ( xR )' () J 0 ( xL ) J 2 ( xL )1 ' () .
(3.4.3)
en las que las cantidades V , rad y tg se definen a partir de promedios acimutales de
productos espectrales normalizados:
V SW ( R,0, ; ) SW (0,0, ; ) ,
rad SU ( R,0, ; ) SU (0,0, ; ) ,
rad
rad
tg SU ( R,0, ; ) SU (0,0, ; ) .
tg
tg
(3.4.4)
y
(3.4.5)
(3.4.6)
Efectivamente, la resolución del sistema de ecuaciones no lineales (3.4.1-3) permite determinar
cR ( ) , cL ( ) y la función ' ( ) a partir de la medida experimental de las tres cantidades
(coeficientes de correlación) V ( ) , rad ( ) y tg ( ) .
Para demostrar (3.4.2-3) podemos comenzar expresando las cantidades U rad ( 0 , , ) y
U tg ( 0 , , ) en términos de los promedios pesados de amplitudes complejas AR1 y AL1 ,
definidas en las Ecs. (3.2.19-20) y de factores exp( i ) (ver Apéndice III.E):
- 84 -
Métodos de autocorrelación espacial.
( AR1 iAL1 )
( A1 iAL1 )
exp(i ) R
exp( i ) ,
2
2
(3.4.7)
(iAR1 AL1 )
(iAR1 AL1 )
exp(i )
exp( i ) .
2
2
(3.4.8)
U rad ( 0 , , ) =
U tg ( 0 , , ) =
Ahora, las integrales SU rad ( R,0, ) y SU tg ( R,0, ) pueden relacionarse con U rad
1 ( ,R ) y
U tg1( , R ) usando sus respectivas definiciones:
SU rad ( R,0, )
SU tg ( R,0, )
( AR1* iAL1* ) rad
( A1* iAL1* ) rad
U1 ( R, ) R
U 1 ( R, ) ,
4
4
(iAR1* AL1* ) tg
(iA 1* AL1* ) tg
U1 ( R, ) R
U 1 ( R, ) .
4
4
(3.4.9)
(3.4.10)
Finalmente, pueden escribirse en términos de funciones de Bessel en las variables xR y x L y de
las cantidades AR1 , AL1 mediante las Ecs. (3.2.17-18). De este modo y después de algún álgebra
(Apéndice III.F), resultan (3.4.2-3) con ' dado por:
2
'
2
AR1 AR1 i( AR1 AL1* AR1 AL1* )
1 2
R
A
1 2
R
A
1 2
L
A
1 2
L
A
1
R
1*
L
2 Im( A A
1
R
1*
L
A A )
.
(3.4.11)
La relación para la componente vertical (3.4.1) es bien conocida, pues la definición de V dada
en (3.4.4) equivale a la del coeficiente de v-SPAC (Ec. 3.3.1). En la derivación determinista
expuesta, ' ( ) tiene parte imaginaria, a menos que Re ARH ,1 AL1* Re( ARH ,1 AL1* ) , y su parte
real no está, en general, acotada entre 0 y 1.
3.4.2. FORMULACIÓN PARA CAMPOS ALEATORIOS ESTACIONARIOS
La aplicación del método a campos aleatorios estacionarios se puede llevar a cabo promediando
en numerador y el denominador de (3.4.5-6) sobre un conjunto de ventanas de duración :
SU rad ( R,0, ; )
SU rad (0,0, ; )
1
2
1
2
SU radU rad ( R, ,0, , ; ) d
.
(3.4.12)
SU radU rad ( R, ,0, , ; ) d
En el límite se tienen inmediatamente, como una consecuencia de las relaciones
- 85 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
deterministas (3.4.9-10), las siguientes expresiones (Apéndice III.F):
SU rad ( R,0, ; )
SU rad (0,0, ; )
SU tg ( R,0, ; )
SU tg (0,0, ; )
( ) J 0 ( xR ) J 2 ( xR ) 1 ( )J 0 ( xL ) J 2 ( xL )
(3.4.13)
( ) J 0 ( xR ) J 2 ( xR ) 1 ( )J 0 ( xL ) J 2 ( xL ) .
(3.4.14)
La cantidad ' ( ) queda pues remplazada por f 0R
f
R
0
f 0L , que resulta una función real
cumpliendo 0 ≤ ( ) ≤ 1 y que representa el cociente entre la densidad espectral de potencia de
las ondas Rayleigh en el movimiento horizontal (una vez sumadas las distintas contribuciones
acimutales) y la total (suma de Rayleigh horizontal y Love). ( ) es denominada “proporción
energética de ondas Rayleigh en la componente horizontal”. La formulación original (pero
parcial) del método (Aki, 1965) se recupera para los casos ( ) = 0 y ( ) = 1. En el primer
caso, los términos de ondas Love representan la única contribución a
SU rad ( R,0, ; )
y
SU tg ( R,0, ; ) , mientras que en el segundo, sólo se conservan las dependencias en x R .
3.4.3. EFECTOS DE UN NÚMERO FINITO DE ESTACIONES
Un estudio analítico de los efectos de N- finito para el 3c-SPAC ha sido llevado a cabo por
Shabani et al. (2010). El procedimiento que describen estos autores, que básicamente es una
extensión del trabajo de Okada (2006) para el v-SPAC, está basado en la relación de JacobiAnger (Ec. 3.3.15). Aunque no se van a dar aquí las expresiones de ̂ rad y ̂ tg , sí se debe
mencionar que tienen propiedades similares a las encontradas para el método v-SPAC. En
general, dos estaciones en posiciones diametralmente opuestas proporcionan valores de
SU rad ( R,0, , ) y SU rad ( R,0, , ) (en la formulación determinista) que no son conjugados en
general. Sin embargo, la relación de conjugación sí se cumple entre las cantidades
GU radU rad ( R, ,0, , ) y GU radU rad ( R, ,0, , ) bajo las hipótesis del campo aleatorio
estacionario. El mismo comportamiento se observa para la componente tangencial. Por
consiguiente, como en el caso del método v-SPAC, las arrays circulares regulares con N y 2N
estaciones sobre la circunferencia, siendo N impar, resultan equivalentes en estas circunstancias
- 86 -
Métodos de autocorrelación espacial.
y en lo que se refiere a la estimación de la partes reals de rad y tg en el límite de proceso
aleatorio. Además, todas las arrays circulares con N par son equivalentes a arrays semicirculares
formadas por N/2 de las estaciones (ver Fig 3.3.2).
En la bibliografía pueden encontrarse varias aplicaciones de este método en ambientes
volcánicos realizadas en la década de los ’90 por Ferrazzini et al. (1991), Chouet et al. (1996) y
Métaxian and Lesage (1997). Entre los trabajos más recientes se pueden citar el de Köhler et al.
(2007), quienes hacen una adaptación del método para arrays irregulares (3c-MSPAC) y el de
Endrun et al. (2010) en el que se comprueba la estabilidad y repetibilidad del método en seis
sitios diferentes. Algunos resultados de estos experimentos han sido ya descritos en el Capítulo
1.
3.5. MÉTODO DE LAS ARRAYS CIRCULARES CONCÉNTRICAS (DOBLE ANILLO O
DR).
Además de recuperar y generalizar las formulaciones anteriores del método 3c-SPAC, las
relaciones (3.2.17-18) nos permiten desarrollar nuevos métodos de análisis del microtremor en
las tres componentes. Una primera vía de resolución de k R ( ) o k L ( ) a partir de éstas consiste
en generar ecuaciones independientes a partir de cualquiera de ellas variando el valor del radio
R. La familia de ecuaciones así generadas compartirán las mismas incógnitas, haciendo posible
su determinación. Como se comentó anteriormente, los coeficientes de Fourier Wm ( R, ) ,
U mrad ( R , ) , U mtg ( R , ) serán mejor aproximados experimentalmente para órdenes bajos (valores
de m próximos a cero). Además, como se observa en (3.2.17) y (3.2.18), U 0rad ( R, ) y U 0tg ( R, )
tienen dependencias simples en k R ( ) , k L ( ) , lo que los hace especialmente adecuados para su
empleo en nuevos métodos. En concreto, estas dependencias son:
U 0tg ( R, ) = 2iAL0 J1 (k L R) ,
(3.5.1)
U 0rad ( R, ) = 2iAR0 J1 (k R R) .
(3.5.2)
Como estamos especialmente interesados en desarrollar técnicas de estimación de la velocidad
de onda Love, nos centraremos en la ecuación (3.5.1). Una explicación geométrica cualitativa del
significado de esta ecuación se muestra en la Fig. 3.5.1. Cuando un frente de onda Rayleigh
plano se propaga a lo largo de la array circular, los registros obtenidos en cualquier pareja de
- 87 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
sensores situados simétricamente respecto a la dirección de propagación y dirigidos
tangencialmente tienen signo opuesto. Por tanto, en la array ideal continua, los registros se
cancelan cuando se promedia sobre el conjunto de estaciones (Fig. 3.5.1a). Sin embargo, en caso
de incidencia de onda Love, ambas estaciones proporcionan el mismo registro (Fig. 3.5.1b), y la
media acimutal a lo largo de la circunferencia dependerá del cociente entre longitud de onda y
radio, así como de la amplitud compleja, que contiene la información sobre la amplitud y la fase
inicial de la onda plana. La linealidad de las operaciones (proyección tangencial y promediado)
justifica la validez de (3.5.1) cuando el campo de ondas consiste en una suma arbitraria de ondas
planas. Variando el radio en (3.5.1) se puede eliminar la dependencia en AL0 ( ) mediante el
cociente:
Figura 3.5.1. Esquema del proceso de selección de ondas Love usando una array circular densa compuesta de
sensores tangenciales. El campo de ondas, para un tiempo fijo, se representa mediante flechas negras. (a) Para ondas
Rayleigh, ambos sensores graban el mismo valor del desplazamiento (longitud de la flecha gris) pero con diferente
signo. Por tanto, el valor promedio de los registros entre esta pareja, así como de los registros en la array continua
completa, es cero. (b) Ambos sensores graban el mismo valor (con el mismo signo) en el caso de incidencia de onda
Love. El valor promedio para la array completa es el mismo que para la mitad derecha o para la mitad izquierda y
depende sólo del cociente entre el radio y la longitud de onda, así como de la amplitud y fase inicial de la onda
plana.
- 88 -
Métodos de autocorrelación espacial.
'tgDR ( R2 , R1 , )
U 0tg ( R2 , ) J 1 ( k L ( ω )R2 )
=
,
U 0tg ( R1 , ) J 1 ( k L ( ω )R1 )
(3.5.3)
al que nos referiremos como cociente espectral tangencial o 'tgDR . El superíndice “DR” (double
ring) hace referencia al montaje empleado, mientras que el símbolo ' distingue esta definición
determinista de su adaptación para campos aleatorios que será desarrollada en la sección
siguiente. Por tanto, la aplicación de (3.5.3) requiere el registro de componentes tangenciales a lo
largo de dos circunferencias concéntricas de radios R1 R2 . Una aproximación discreta a este
esquema mediante dos arrays pentagonales se muestra en la Fig. 3.5.2.
Figura 3.5.2. Sistema de coordenadas y array típica para el método del doble anillo.
La velocidad de onda Love se determina evaluando experimentalmente el miembro izquierdo, y
despejando
k L ( )
mediante
alguna
técnica
numérica,
conocidos
los
radios.
Desafortunadamente, U 0tg ( R, ) se anula para una circunferencia de radio cero (porque
J 1 ( 0 ) 0 ), lo que hace inviable el reemplazamiento de una de las dos circunferencias por una
estación central. La función J1 (k L () R2 ) J1 (k L () R1 ) está representada en la Fig. 3.5.3 para
algunos valores particulares del cociente R2 R1 . Como se aprecia, esta función tiende a R2 R1
cuando k L 0 (o cuando 0 ). Con el objetivo de preservar la continuidad de 'tgDR hasta
valores de k L tan altos como sea posible, supondremos siempre que R2 R1 (el argumento de la
- 89 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
función de Bessel del denominador crece más lentamente que el argumento de la del
denominador conforme k L aumenta). Con este criterio, la primera divergencia aparece en
k L R1 3.84.
Fig. 3.5.3. Forma de la función J1 (k L R2 ) J1 (k L R1 ) frente a k L R1 (Fig. a) y frente a k L R2 (Fig. b) para varios
valores de R2 R1 .
Por último, cabe mencionar que la ecuación (3.5.2) proporciona una alternativa al cálculo de
velocidades de ondas Rayleigh mediante v-SPAC, usando la componente radial del movimiento
en lugar de la vertical. Para ello, se utilizaría
DR
'rad
( R2 , R1 , )
U 0rad ( R2 , ) J 1 ( k R ( ω )R2 )
=
,
U 0rad ( R1 , ) J 1 ( k R ( ω )R1 )
(3.5.4)
que es el análogo de (3.5.3). A priori, la utilidad de esta técnica parece limitada (en comparación
con el método v-SPAC) ya que, para N finito, habrá que considerar los efectos de la
contaminación de los registros por ondas Love, que además son normalmente las ondas
predominantes en la componente horizontal. Aún así, esta técnica puede ser interesante en
aquellas bandas de frecuencia en las que la potencia de la componente vertical Rayleigh aparece
muy disminuida, como en el entorno de la frecuencia de resonancia en estructuras con alto
contraste de impedancias entre la cubierta sedimentaria y el basamento.
3.5.1. FORMULACIÓN PARA CAMPOS ALEATORIOS ESTACIONARIOS
En el caso de que el campo de ondas deba de ser descrito como un proceso aleatorio
estacionario, conviene reformular el método en función de densidades espectrales cruzadas entre
promedios acimutales (definiciones 3.3.8 y 3.2.33).
- 90 -
Métodos de autocorrelación espacial.
Esta adaptación se puede realizar de varias maneras. Probablemente, la más directa y la que
preserva mejor la forma de la ecuación original consiste en multiplicar numerador y
denominador en la definición de 'tgDR por U 0tg * ( R1 , ; ) (2 ) (donde, de nuevo, es la
duración de las ventanas temporales a analizar) y tomar el valor esperado del numerador y del
numerador sobre un conjunto de realizaciones (distintas ventanas). En el límite tenemos:
tgDR ( R2 , R1 , )
GU tg 0U tg 0 ( R2 , R1 , )
GU tg 0U tg 0 ( R1 , R1 , )
=
J1 (k L ( ) R2 )
,
J1 (k L ( ) R1 )
(3.5.5)
que es ya apta para campos estacionarios. Para evitar ambigüedades, quitaremos el símbolo ' de
'tgDR cuando está definido como en (3.5.5).
3.5.2. EFECTO DE UN NÚMERO FINITO DE ESTACIONES. UNA APROXIMACIÓN
NUMÉRICA SIMPLIFICADA.
Extendiendo las ideas de Henstridge (1979), la variación relativa de la velocidad de fase de
ondas Love, c L , puede relacionarse con las variaciones en 'tgDR (o tgDR ) mediante propagación
de errores:
2
2
DR
J (x )
J (x )J (x )
var(c) d 'tg
k
var( 'tgDR ) 0 2 x2 0 12 1 2 x1 var( 'tgDR ) ,
2
c
J1 ( x1 )
J1 ( x1 )
dk
(3.5.6)
donde xi k L Ri y var(·) significa “varianza”. Un valor pequeño de var(c) es interpretado como
buena sensibilidad de 'tgDR ante variaciones en c o, equivalentemente, como una baja
propagación de las incertidumbres en 'tgDR a la velocidad de fase. Interesa encontrar rangos para
los radios R1 y R2 y el mínimo número de sensores que nos permitan mantener las
incertidumbres relativas en c suficientemente pequeñas (5% - 10% a lo sumo). García-Jerez et
al. (2006b) tratamos de resolver este problema de forma aproximada mediante el procedimiento
que se expone a continuación. Un tratamiento analítico más completo puede encontrarse en la
Sección 3.5.3.
Primeramente, se estima var( 'tgDR ) o, al menos una cota de error para 'tgDR , en función de R1 ,
- 91 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
R2 y k L de la siguiente manera:
Para ambos radios R1 y R2 calculamos la respuesta de la array tangencial a una onda Love, a la
que llamaremos H tgL ( N , kR, ) , definida como el promedio del módulo de los registros
tangenciales (en el dominio de la frecuencia) obtenidos en una array circular de N sensores y
para una iluminación que consiste en una onda plana Love con número de onda k , amplitud
unidad y azimut φ :
H tgL ( N , kR, ) = 1
N
N
cos(
n 1
n
)e ikR cos( n ) ,
(3.5.7)
siendo θ n es el azimut de la estación n . H tgL ( N , kR, ) equivale a Uˆ 0tg /( 2 ) (por la Ec. 3.3.13)
si las estaciones están equiespaciadas. Los valores de esta función-respuesta para arrays
circulares regulares compuestas de entre 2 y 8 estaciones se muestran en la Fig. 3.5.4a.
La diferencia máxima entre el valor teórico de tgDR para una array infinitamente densa (esto
es, J1 (kR2 ) / J1 (kR1 ) ) y el resultado para una array finita se estima para cada configuración
( R1 , R2 , N ) y número de onda k . Esto se puede hacer, de modo aproximado, calculando por
separado los errores asociados a cada anillo y propagándolos a 'tgDR mediante una expansión de
Taylor del cociente. Una aproximación conservadora consiste en considerar la distribución de las
diferencias entre H tgL ( N , kR, ) y J 1 ( kR ) cuando φ varía entre 0 y 2 π y calcular el máximo
del valor absoluto de éstas. Imponiendo una incertidumbre mínima de 0.01 en cualquier caso, se
asegura un error apreciable a longitudes de ondas largas. Para prevenir denominadores próximos
a cero en 'tgDR (en cuyo caso no tiene sentido propagar errores linealmente al cociente), los
resultados se rechazan cuando la desviación correspondiente a la subarray pequeña ( R1 ) es
mayor que J1 (kR1 ) (bandas verticales en Fig. 3.5.5).
Una vez que var( 'tgDR ) ha sido estimada, se sustituye en (3.5.6) y se identifica la región del
plano kR1 - kR2 en la que var(c)1/ 2 / c corresponde al error relativo deseado. Los resultados para
arrays formadas por de 4 a 9 estaciones por anillo (y el mismo número de estaciones en ambos)
se muestran en la Fig. 3.5.5.
- 92 -
Métodos de autocorrelación espacial.
Figura 3.5.4. Respuestas de array para varias configuraciones simples. La columna (A) corresponde a
H tgL ( N , kR, ) 2 , mientras que la columna (B) corresponde a H tgR ( N , kR, ) 2 .
- 93 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 3.5.5. Incertidumbre relativa estimada en la velocidad de fase. N indica el número de
estaciones en cada uno de los anillos. La línea negra corresponde con un doble anillo cuyos radios
guardan la relación R2 2R1 .
A la vista de la Fig. 3.5.5, se obtienen ya resultados aceptables resultados para N 5, mejorando
generalmente conforme N crece, y más rápidamente al alcanzar valores impares de N. Para
N =5, y en el rango de números de onda bajos, se obtienen los mejores resultados cuando
R1 / R2 2 o ligeramente mayor (hasta 3), mostrándose incertidumbre por debajo del 10% hasta
números de onda de k 3.7 / R2 al menos. Las conclusiones obtenidas para ondas Love pueden
también usarse para el procedimiento alternativo de cálculo de curvas de dispersión Rayleigh
R
( N , kR, φ ) = H tgL ( N , kR, φ ) . Nótese que
descrito por la ecuación (3.5.4), debido a la relación H rad
R
( N , kR, φ ) debe ser entendido ahora como número de onda Rayleigh.
k en H rad
Limitaciones de este cálculo
Los resultados del ejercicio anterior han de tomarse con prudencia. Una limitación de éste es que
sólo se ha considerado la actuación de una onda plana Love. Sin embargo, al elegirse el acimut
de ésta de manera que maximice la distorsión de 'tgDR , el resultado puede ser conservador en este
- 94 -
Métodos de autocorrelación espacial.
aspecto. Por otra parte, una cuestión relevante para la estimación de errores, y que no ha sido
tomada en cuenta, es la eficiencia del método para el “rechazo” del tipo de ondas con
polarización no deseada (ondas Rayleigh para la array tangencial). Sin embargo, encontrar una
regla general parece difícil ya que, para cada frecuencia hay dos cantidades involucradas: la
potencia relativa de tales ondas y su longitud de onda. Obviamente, una buena respuesta de la
array tangencial para el número de onda Love k L no implica un rechazo efectivo de las ondas
Rayleigh para el k R correspondiente. Un conocimiento aproximado previo de la estructura del
suelo o de la curva de dispersión Rayleigh puede usarse para obtener límites aproximados de
k L y k R , y comprobar la capacidad para el rechazo de las dos circunferencias que forman el
anillo doble. La eficiencia para el rechazo de una array circular puede estimarse calculando su
respuesta ante ondas que se propagan con la polarización no deseada para cualquier número de
onda k :
L
H rad
( N , kR, φ ) = H tgR ( N , kR, φ ) = 1
N
N
sin( φ θ
n 1
n
)e ikR cos( φθn ) ,
(3.5.8)
que se ha representado en la Fig. 3.5.4b para algunas arrays circulares. Cuanto menor es esta
cantidad, mayor es la capacidad de rechazo.
3.5.3. EFECTO DE UN NÚMERO FINITO DE ESTACIONES. APROXIMACIÓN
ANALÍTICA.
Como se hizo para el v-SPAC, el problema de estimar los efectos de N finito puede plantearse
desde un punto de vista analítico, si bien, la formulación resulta relativamente complicada. Los
pasos fundamentales son esbozados a continuación para el caso del campo aleatorio estacionario.
Admitiendo que las estaciones están situadas en los puntos R1, j R1e( j 1) y R 2, j R2e ( j 1)
con j = 1, 2, …, N; = 2/N y por tanto, equiespaciadas, podremos expresar el coeficiente de
Fourier de orden cero afectado por N finito, Uˆ 0tg ( R, ) , como la suma de los coeficientes de
órdenes múltiplos de N obtenidos para una array circular continua (Ec. 3.3.14):
Uˆ 0tg ( R, )
U
j
tg
jN
( R, )
En el caso del producto Uˆ 0tg ( R2 , )Uˆ 0tg* ( R1 , ) tendremos, sustituyendo (3.2.18):
- 95 -
(3.5.9)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Uˆ 0tg ( R2 , )Uˆ 0tg* ( R1 , )
{ [ (i)
jN
j,l
ARjN J jN 1 ( xR ) J jN 1 ( xR ) + (i) jN 1ALjN J jN 1 ( xL ) J jN 1 ( xL )]
[ i lN ARlN* J lN 1 ( xR ) J lN 1 ( xR ) + i lN 1ALlN* J lN 1 ( xL ) J lN 1 ( xL ) ]}
(3.5.10)
De nuevo, obtenemos el caso de campo aleatorio mediante un promedio en la colectividad de la
expresión anterior evaluada en ventanas temporales largas. Tras el uso de (3.2.44) obtenemos:
{ i
(l j ) N
j,l
U tgjN ( R2 , ; ) U lNtg* ( R1 , ; )
GˆU tg 0U tg 0 ( R2 , R1 , ) lim
2
j ,l
2 f ( Rj l ) N J jN 1 (k R R2 ) J jN 1 (k R R2 )J lN 1 (k R R1 ) J lN 1 (k R R1 )
+ i (l j ) N 2 f ( Lj l ) N J jN 1 (k L R2 ) J jN 1 (k L R2 ) J lN 1 (k L R1 ) J lN 1 (k L R1 )},
(3.5.11)
que, después de algún algebra se puede simplificar a:
GˆU tg 0U tg 0 ( R2 , R1 , ) 2
i
N
~
~
{ f RN h,1N (k R R2 , k R R1 ) fLN h,1N (k L R2 , k L R1 )} =
~
~
2 [ f 0R h0, N1 (k R R2 , k R R1 ) f 0L h0, N1 (k L R2 , k L R1 )]
~
~
2 2 i N {Re[ fRN ]h,1N (k R R2 , k R R1 ) Re[ fLN ]h,1N (k L R2 , k L R1 )} (3.5.12)
1
donde se ha definido:
~
hs, N ( x2 , x1 )
J
l
( l ) N 1
( x2 ) s J ( l ) N 1 ( x2 ) J lN 1 ( x1 ) s J lN 1 ( x1 )
(3.5.13)
~
~
con s tomando valores +1 ó -1, y que cumple hs , N ( x2 , x1 ) hs, N ( x1 , x2 ) .
Finalmente, la versión de tgDR ( R2 , R1 , ) afectada por efectos de N finito, se obtiene como:
ˆ tgDR ( R2 , R1 , )
Gˆ U tg 0U tg 0 ( R2 , R1 , )
.
Gˆ tg tg ( R , R , )
U 0U 0
1
(3.5.14)
1
3.5.4. EFECTOS DEL RUIDO INCOHERENTE
Los registros de microtremor están siempre contaminados, en alguna medida, por ruido
incoherente debido a procesos electrónicos en el interior del sistema de grabación o a algunos
fenómenos externos que violan el postulado de iluminación por ondas planas (viento, fuentes
cercanas,…). Estos efectos han sido ya estudiados para algunos métodos tipo SPAC (Cho et al.,
- 96 -
Métodos de autocorrelación espacial.
2006a, 2006b, García-Jerez et al., 2008b, García-Jerez et al., 2010) y se evidencian generalmente
por un decrecimiento en las amplitudes de los coeficientes de correlación y cantidades
asimilables a estos. Basaremos el tratamiento de este fenómeno en las siguientes hipótesis: i) el
ruido no correlacionado puede ser modelado como un proceso aleatorio estacionario
estadísticamente independiente de la señal; ii) las formas de ondas correspondientes al ruido que
aparecen en distintas estaciones o en distintas componentes de una estación dada, no están
correlacionadas entre sí; iii) las densidad espectral de potencia del ruido es igual para todos los
sensores horizontales y será denominada PH( n ) ( ) , donde el superíndice (n) indica que nos
referimos al ruido (noise). Como se verá inmediatamente, los efectos del ruido incoherente sólo
tienen sentido en el caso de N finito, por lo que ambos habrán de analizarse conjuntamente.
El numerador de (3.5.14), GˆU tg 0U tg 0 ( R2 , R1 , ) , es teóricamente insensible al ruido incoherente.
En efecto, el cálculo de Uˆ 0tg ( R2 , )Uˆ 0tg* ( R1 , ) , usando las definiciones (3.3.13), da lugar a una
suma sobre p y q de productos con la forma U tg ( R2 , p , )U tg* ( R1 , q , ) que van multiplicados
por pesos complejos (irrelevantes en esta discusión). Si existe ruido no correlacionado, cada
registro puede descomponerse en dos sumandos: uno que da cuenta de la señal, para el que
mantendremos la notación U tg ( R2 , p , ) o U tg ( R2 , q , ) , y otro que corresponde al ruido, al
que notaremos con el superíndice (n). La suma de ambos (i. e. el “registro ruidoso”) se etiquetará
con
(s+n).
Como,
por
hipótesis,
el
ruido
y
la
señal
no
están
correlacionados, U tg ( Rl , p , )U tg ( n)* ( Rm , q , ) /( 2 ) 0 , incluso si l=m y p=q. El ruido
grabado
por
sensores
distintos
tampoco
lo
está,
así
que
U tg ( n) ( Rl , p , )U tg ( n)* ( Rm , q , ) /( 2 ) 0 sólo si lm ó pq. De estas hipótesis, y teniendo
en cuenta que los radios implicados son diferentes, se desprende que ninguno de los productos
U tg ( sn ) ( R2 , p , )U tg*( sn) ( R1 , q , ) /( 2 ) que forman GˆU( stg0nU) tg 0 ( R2 , R1 , ) quedan afectados
por el ruido.
El denominador, GˆU( stg0nU) tg 0 ( R1 , R1 , ) sí estaría afectado por el ruido no correlacionado en los
sensores (siempre en el caso de N finito). Su versión “ruidosa” puede escribirse en función de
PH( n ) ( ) como (Apéndice III.G):
4 2 ( n )
( sn )
ˆ
ˆ
PH ( ) ,
GU tg 0U tg 0 ( R1 , R1 , ) GU tg 0U tg 0 ( R1 , R1 , )
N
- 97 -
(3.5.15)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
con lo que el cociente queda:
ˆ
DR ( s n )
tg
( R2 , R1 , )
GˆU( stg0nU) tg 0 ( R2 , R1 , )
GˆU( stg0nU) tg 0 ( R1 , R1 , )
=
Gˆ U tg 0U tg 0 ( R2 , R1 , )
4 2 ( n )
Gˆ U tg 0U tg 0 ( R1 , R1 , )
PH ( )
N
GˆU tg 0U tg 0 ( R2 , R1 , ) / f 0R ( ) f 0L ( )
=
4
GˆU tg 0U tg 0 ( R1 , R1 , ) / f 0R ( ) f 0L ( )
NSRH ( )
N
2
.
(3.5.16)
En esta expresión, NSRH ( ) PH( n) ( ) f 0R ( ) f 0L ( ) es la relación ruido-señal en el
registro de cualquier componente horizontal. Teniendo en cuenta (3.5.12), la expresión del
numerador, GˆU tg 0U tg 0 ( R2 , R1 , ) / f 0R ( ) f 0L ( ) , se puede escribir como una función de k L R1 ,
k L R2 , k R R1 , k R R2 , de la potencia relativa de ondas Rayleigh ( ) y de factores adimensionales
f mR ( ) / f 0R ( ) y f mL ( ) / f 0L ( ) , con m múltiplo de N, que dan cuenta de la geometría de la
distribución acimutal de las fuentes Rayleigh y Love, respectivamente. La dependencia en ( )
se puede sustituir por una dependencia en la razón de energías Rayleigh-Love
RLR( ) f 0R ( ) f 0L ( )
ya
() RLR() RLR() 1 .
que
El
término
GˆU tg 0U tg 0 ( R1 , R1 , ) / f 0R ( ) f 0L ( ) del denominador se reescribe en función de las mismas
variables, excepto de k L R2 y k R R2 . En conclusión, la presencia de ruido no correlacionado sólo
agrega
un
sumando
proporcional
a
NSRH ( )
en
el
denominador.
Como
GˆU( stg0nU) tg 0 ( R1 , R1 , ) GˆU tg 0U tg 0 ( R1 , R1 , ) cuando N, los efectos del ruido incoherente han de
disminuir al aumentar el número de estaciones,
3.5.5. UN EJEMPLO NUMÉRICO SENCILLO.
Con el objetivo de comprobar las ecuaciones deducidas para los de efectos de N finito y ruido no
correlacionado se realiza a continuación un ejemplo numérico basado en una estructura simple
(Tabla 3.5.1) consistente en una capa homogénea de espesor H=100m sobre un semiespacio más
rígido, iluminada por ondas superficiales planas. Se asume propagación de los modos
fundamentales de ondas Rayleigh y Love, cuyas curvas de dispersión pueden encontrarse en la
Figura 3.6.11. Se tomaron los radios R1=125m, R2=250m, los valores RLR=0.2 y NSRH=0.3 y
una iluminación anisótropa con una dirección de propagación dominante. En concreto, se usaron
- 98 -
Métodos de autocorrelación espacial.
funciones f R (, ) y f L (, ) con una dependencia “triangular” en , de base (Fig. 3.6.12)
y constantes respecto a (ruido blanco). Se modeló el campo para distintos valores del acimut
central del haz y de , tomando para ello un conjunto de ondas planas con amplitudes
dependientes del azimut, proporcionales a f R (, )1/ 2 y f L (, )1 / 2 y fases aleatorias. Las
direcciones de las ondas incidentes se eligieron a intervalos de 1º o de 1/30 del ancho del haz (la
cantidad menor). Una vez que los registros fueron sintetizados en el dominio de la frecuencia en
las posiciones de cinco estaciones virtuales (N =5), se les introdujo el ruido incoherente sumando
términos con amplitud
PH(n ) (calculable a partir de NSRH, f R (, ) y f L (, ) ) y fases
aleatorias, distintas para cada estación virtual y componente. Los registros tangenciales fueron
promediados siguiendo (3.3.13) y los productos U 0tg ( R2 , ) U 0tg* ( R1 , ) y U 0tg ( R1 , ) U 0tg* ( R1 , )
calculados seguidamente. A continuación, se promediaron ambos sobre un total de 500
realizaciones en las que las fases asociadas a la iluminación Rayleigh, Love y al ruido
incoherente variaron aleatoriamente. El cociente entre estos promedios, que son proporcionales a
GˆU( stg0nU) tg 0 ( R2 , R1 , ) y GˆU tg 0U tg 0 ( R2 , R1 , ) respectivamente, corresponde a ˆ tgDR ( sn) ( R2 , R1 , ) y se
representa en la Fig. 3.5.6, en distintas subfiguras (las superiores) en función del ancho del haz
(2º, 30º y 60º) y utilizando distintos símbolos según el azimut central usado. Como referencia en
la medida del acimut, se asume que hay un sensor (por pentágono) en el azimut 0.
Tabla 3.5.1. Modelo de suelo unidimensional usado para simulación del campo de ondas.
N. Capa
VS (m / s)
VP (m / s)
H (m)
(g/cm3)
1
500
935
100
2.1
2
1000
1870
2.1
Las líneas delgadas en las Figs. 3.5.6 muestran los correspondientes resultados analíticos
obtenidos de las expresiones (3.5.12) y (3.5.16) mientras que la línea gris muestra el resultado
para campo isótropo. Para evaluar los primeros, se obtuvieron los valores de f mL ( ) y f mR ( )
analíticamente con ayuda de la relación:
e
im
2
1
senm / 4
U 2 d
, 2 ,
2 m / 4
2
- 99 -
(3.5.17)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
donde U es la función unitaria de Heaviside. El factor 1 2 U 2 del integrando
representa un triángulo isósceles de altura 1 y base centrado en el acimut 0 . Para obtener los
f mL ( ) o f mR ( ) correspondientes a una iluminación triangular de amplitud y acimut central
generales hay que multiplicar el segundo miembro de (3.5.17) por los valores que toma
f R (, ) o f L (, ) en tal acimut central del triángulo (máximo) y por una fase de – m veces
el azimut central. Las series que intervienen en las ecuaciones (3.5.12-13) se truncaron en = 9 y
l=9, comprobando que los términos de órdenes superiores tienen poca influencia dentro del
rango de frecuencias mostrado. Las líneas delgadas en las figuras 3.5.6 muestran estos resultados
analíticos A la vista de las Figs. 3.5.6, se aprecia una buena correspondencia entre los valores
sintéticos y analíticos de ˆ tgDR ( sn) ( R2 , R1 , ) en todos los casos, apoyándose la validez de los
desarrollos analíticos y mostrando que el número de fuentes (muestreo acimutal) y el número de
ventanas promediadas en el test numérico son suficientes.
Figura 3.5.6. Arriba: Resultados del ejercicio numérico descrito en el texto para una array pentagonal doble
(R1=125m, R2=250m), campo anisótropo con dirección predominante y anchura del haz y efectos de ruido
incoherente. Se ilumina con ondas planas según los modos fundamentales del modelo de la Tabla 3.5.1. y RLR=0.2.
La potencia de ruido incoherente corresponde a NSRH = 0.3. Se muestran promedios de 500 realizaciones en las
que, tanto la iluminación como el ruido no correlacionado, tienen fases aleatorias. Abajo: Resultados analíticos
correspondientes, obtenidos de las expresiones (3.5.14) y (3.5.16).
- 100 -
Métodos de autocorrelación espacial.
3.5.6. COMPARACIÓN CON UN MÉTODO SIMILAR.
Un método alternativo y con similares potencialidades para el cálculo de velocidades de fase de
onda Love ha sido desarrollado, de forma prácticamente simultánea al presentado aquí, por Cho
et al. (2006b) y Tada et al. (2006) en el contexto de campos aleatorios estacionarios. El método
es denominado por los autores “TR” (Two-radius). La disposición de sensores en dos
circunferencias concéntricas es la misma que para el DR y la ecuación fundamental es la
siguiente:
tgTada ( R2 , R1 , )
GU tg 0U tg 0 ( R2 , R2 , )
GU tg 0U tg 0 ( R1 , R1 , )
=
J12 (k L ( ) R2 )
,
J12 (k L ( ) R1 )
(3.5.18)
(Ec. 72 en Cho et al. 2006b. Ver ese artículo para una demostración). Nótese la diferencia con
(3.5.5) en el numerador del miembro izquierdo y en los cuadrados del miembro derecho.
A pesar de la similitud con el método DR desarrollado en esta tesis, existen varias diferencias
significativas entre ambos:
El
miembro
derecho
de
(3.5.5)
es
J1 (k L ( ) R2 ) J1 (k L ( ) R1 )
en
vez
de
J12 (k L ( ) R2 ) J12 (k L ( ) R1 ) , lo que permite mantener la biyectividad entre tgDR y sus
argumentos hasta valores mayores de k L R2 (ver Fig. 3.5.7).
Fig. 3.5.7. Forma de las funciones J1 (k L R2 ) J1 (k L R1 ) (línea continua) y J 12 (k L R2 ) J12 (k L R1 ) (línea discontinua)
frente a k L R1 (Fig. a) y k L R2 (Fig. b) para el caso particular R2 R1 2 . La primera función (método DR)
permanece biyectiva hasta k L R2 = 5.8 (línea continua vertical en subfigura b), mientras que la segunda (propuesta
por Tada et al. (2006) y Cho et al (2006b), lo es sólo hasta 3.8 (línea discontinua vertical).
- 101 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Estudiando el caso de campo isótropo, se encuentra que el método DR está afectado por
efectos de N finito en menor medida que el método de TR en el rango de longitudes de onda con
más interés (las suficientemente largas como para que las funciones no se hagan fuertemente
oscilantes). En las subfiguras de la izquierda de la Fig. 3.5.8 se muestran, para una array doble
pentagonal con R2=2R1, las desviaciones en ̂ tgDR debidas a la existencia de ondas Rayleigh en el
campo no rechazadas completamente por el método. En las subfiguras de la derecha se hace un
cálculo semejante para las variaciones en
̂ tgTada . Las curvas correspondientes a desviaciones de
0.01, 0.05 y 0.1 están marcadas con distintos tipos de línea. En la figura se aprecia que los
efectos adversos de las ondas Rayleigh son más notables, obviamente, cuando su proporción de
energía crece, pero también si éstas muestran velocidades bajas respecto a las Love.
Para facilitar la comparación entre los métodos, supongamos provisionalmente que el cociente
de las velocidades Rayleigh y Love es próximo a uno. En caso de que el contenido de onda
Rayleigh sea pequeño (9% ó = 0.09, RLR=0.1) se tienen desviaciones en ̂ tgDR por debajo de
0.05 hasta kLR2 = kRR2 = 6.13, mientras que si el contenido de energía Rayleigh es relativamente
elevado (60% ó = 0.60, RLR=1.5) ese alto grado de estabilidad se conserva sólo hasta kLR2 =
kRR2 = 4.38. Para el método TR de Tada et al. (2006), estos umbrales son sensiblemente más
bajos: 5.5 y 3.09 respectivamente.
La parte relevante del contorno 0.01, calculado para el método DR, se ha superpuesto, coloreado
en blanco, sobre las figuras correspondientes al método TR. La comparación entre las dos líneas
continuas (blanca y negra) confirma que la región de estabilidad del método DR (frente a efectos
de las ondas Rayleigh con N finito y en campo isótropo) es mayor, para las diferentes
condiciones de RLR y relaciones de velocidad cL/ cR mostradas.
El caso de iluminación anisótropa es complicado de estudiar de modo general dada la diversa
casuística posible, optándose por realizar una comparación par el modelo particular utilizado en
la sección anterior, que se muestra en la Figura 3.5.9. Para un ancho de haz de 2º, ̂ tgDR
permaneció relativamente estable (variaciones menores de 0.1) en el rango de frecuencias de 0 a
1.98 Hz (hasta k L R2 = 5.18) ante cambios en la dirección de incidencia, mientras que
̂ tgTada lo
fue sólo hasta 1.48Hz ( k L R2 = 3.41). También se advierte cierta inestabilidad en los rasgos de
̂ tgTada (máximos, mínimos,…) frente a la relativa estabilidad de ̂ tgDR . En ambos casos, la
- 102 -
Métodos de autocorrelación espacial.
variabilidad disminuyó al crecer la anchura acimutal de la iluminación hasta 30º, si bien, sólo
̂ tgDR mejoró significativamente el intervalo con desviaciones menores que 0.1, que ahora se
extiende hasta 2.39Hz ( k L R2 =6.63). El método de Tada et al. supera este umbral a 1.56Hz, aún
en las proximidades del mínimo relativo. Finalmente, para una anchura de 60º ambos métodos
presentan ya gran estabilidad en todo el rango mostrado.
Figura 3.5.8. Efectos de N- finito para el método DR (figuras de la izquierda) y para el método TR (Tada et al. 2006)
(derecha). Los cálculos son para dos pentágonos concéntricos de radios cumpliendo R2=2R1. Con la escala de
colores se muestra, a la izquierda, ˆ tgDR ( RLR) ˆ tgDR ( RLR 0) como función de x L k L R2 , x R k R R2 . Cada
subfigura considera un valor de la relación de potencias Rayleigh-Love (RLR) indicado en el título. Las líneas
continuas, discontinuas y con punto-ralla alternantes muestran los niveles 0.01, 0.05 y 0.1 respectivamente. Las
subfiguras
ˆ tgTada Gˆ U
de
tg
0 U tg 0
la
derecha
corresponden
a
ˆ tgTada ( RLR) ˆ tgTada ( RLR 0) ,
donde
( R2 , R2 , ) Gˆ U tg 0U tg 0 ( R1 , R1 , ) . Para facilitar la comparación se superponen, en blanco, las líneas
continuas del método DR.
El ruido incoherente también tiene efectos distintos en ambos métodos. Aunque el
denominador sí esté afectado por el ruido, el hecho de que el numerador del método DR no lo
esté (Ec. 3.5.16) implica que los ceros de ̂ tgDR permanecerán estables. El primero de estos cortes
por cero (el de longitud de onda más larga) ocurre alrededor de kLR2 = 3.83, para N
suficientemente alto. En el método TR, son los cortes por uno de ̂ tgTada los que permanecen
inalterados. Si N es suficientemente alto, el primer corte por 1 ocurre cerca de la primera raíz de
J 1 (kLR2) J1 (kLR1) = 0 (y a un valor kLR2 forzosamente menor que 3.83). La formulación
correspondiente a este último método en presencia de ruido incoherente es fácilmente
- 103 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
reproducible a partir de las ecuación (3.5.15) y, para el caso particular de campo isótropo, puede
encontrarse en el artículo de Tada et al. (2006).
Figura 3.5.9. Comparación entre ̂ tgDR (arriba) y ̂ tgTada (abajo) para una array doble pentagonal de radios 125m y
250m situada sobre la estructura de la tabla 3.5.1 y asumiendo propagación de los modos fundamentales de ondas
superficiales. La amplitud del intervalo de azimuts del que procede la iluminación crece hacia la derecha y está
indicado sobre cada subfigura. Cada línea negra corresponde a un acimut central. Adviértase que el eje vertical en
las figuras superiores representa un intervalo de valores doble al de las figuras inferiores, por lo que las diferencias
entre las distintas funciones se ven amplificadas en un factor 2 en las inferiores.
Para ambos métodos, el disponer de estas “frecuencias de control” libres de efectos de ruido
tiene interés práctico para el diagnóstico de los problemas que surgen en las aplicaciones reales.
La comparación entre los dos métodos para el mismo caso particular usado en la figura anterior,
tomando NSRH=0.3 para todas las frecuencias e iluminación isótropa, se muestra en la Figura
3.5.10. En ella se aprecia cómo el ruido se vuelve dominante a bajas frecuencias haciendo tender
̂ tgDR y ̂ tgTada a 0 y a 1 respectivamente. El rango de frecuencias en que el deterioro en el
coeficiente es relativamente bajo (menor de 0.1) está marcado entre líneas verticales. Se aprecia
claramente que ̂ tgTada se mantiene poco alterado en un intervalo de frecuencias más bajas que
̂ tgDR , lo que se puede considerar una característica positiva.
- 104 -
Métodos de autocorrelación espacial.
Figura 3.5.10. Efecto conjunto del ruido incoherente y de N finito (N = 5) sobre los coeficientes
̂ tgDR (líneas negras) y
̂ tgTada (líneas grises) para el mismo caso de la Fig. 3.5.9, suponiendo
iluminación isótropa y un NSRH de 0.3. Las líneas continuas representan los coeficientes
afectados por ruido, mientras que las discontinuas están libres de él. Los segmentos verticales
limitan intervalos con variaciones debidas al ruido incoherente menores que 0.1.
3.6. MÉTODO DE LA ARRAY CIRCULAR ÚNICA (Single Circular Array o SCA).
La resolución del sistema de tres ecuaciones no lineales que definen el método 3c-SPAC para la
estimación de cL() puede plantear algunas dificultades prácticas. Por otra parte, el método del
Doble Anillo es relativamente costoso en cuanto al número de estaciones necesarias (unas 10
estaciones para tener un rango de longitudes de onda validas notable). Se plantea a continuación
una técnica alternativa, a la que denominaremos SCA (Single Circular Array), que recoge varios
de los méritos de ambos métodos: un despliegue experimental aún más sencillo que para el
método 3c-SPAC (ver Fig. 3.6.1) y un tratamiento numérico que, en el paso crítico de la
determinación de velocidades de ondas Love a partir de cantidades observables, es también más
sencillo que para el método del Doble Anillo. De paso, el método también permite el cálculo de
velocidades de onda Rayleigh, aunque las capacidades de este cálculo en la práctica necesitan
más comprobaciones y difícilmente serían mayores que las del v-SPAC o del CCA. Esta
metodología la hemos desarrollado en García-Jerez et al. (2008b) y (2010).
3.6.1. DESCRIPCIÓN DEL MÉTODO. OBTENCIÓN DE LA VELOCIDAD DE ONDA LOVE
El método SCA consiste en una resolución conjunta de las ecuaciones (3.2.16-18) para un único
- 105 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 3.6.1. Disposición general de estaciones usada en el método SCA
equiespaciadas sobre una circunferencia.
radio R . Como consecuencia, la necesidad de una estación central es eliminada. Si se consideran
la ecuaciones (3.2.16) y (3.2.17) para los casos m = -1, 0, 1; la ecuación (3.2.18) para m = -1, +1
junto a la ecuación (3.2.21), que proporciona tres condiciones adicionales para los cocientes
ARm / ARV ,m , se puede forma un sistema de once ecuaciones involucrando las incógnitas xL , xR ,
, ARV ,1 , ARV ,0 , ARV ,1 , AR1 , AR0 , AR1 , AL1 y AL1 . Este sistema incluye ocho coeficientes accesibles
rad
rad
experimentalmente: W1 , W0 , W1 , U rad
, U tg1 y U1tg a partir de los cuales, las
1 , U 0 , U1
magnitudes xL , xR y , dependientes de la estructura, pueden despejarse.
En una primera etapa, simplificamos el sistema eliminando las sumas de amplitudes pesadas de
las ondas planas que componen el campo de ondas. Esto conduce (Apéndice III.H) a:
U 0rad ( R, )
( )
,
xR
f 0 ( x R )W0 ( R, )
U 1rad ( R, ) f1 ( x L ) iU 1tg ( R, ) ( )
,
xR
f1 ( x R ) f1 ( x L ) 1W1 ( R, )
- 106 -
(3.6.1)
(3.6.2)
Métodos de autocorrelación espacial.
tg
U rad
( )
1 ( R, ) f 1 ( x L ) iU 1 ( R, )
,
xR
f1 ( x R ) f1 ( x L ) 1W1 ( R, )
(3.6.3)
donde las funciones f m (x) se han definido, para cualquier m , como:
f m (x) =
x
J m1 ( x) J m1 ( x) / J m ( x) = x J m1 ( x) m .
2
J m ( x)
(3.6.4)
Las funciones f 0 ( x) y f1 ( x) se muestran en la figura 3.6.2a para los casos m = 0 y m = 1. La
función f1 ( xL ) también se reescribirá a veces como [ J 0 ( xL ) J 2 ( xL )] [ J 0 ( xL ) J 2 ( xL )] .
La eliminación de xR y entre las ecuaciones (13) y (14) conduce a la ecuación en x L :
f1 ( x L ) B( R, ) ,
(3.6.5)
donde B representa la cantidad:
Bi
U tg1 ( R, )W1 ( R, ) U1tg ( R, )W1 ( R, ) .
rad
U rad
1 ( R, )W1 ( R, ) U1 ( R, )W1 ( R, )
(3.6.6)
B puede evaluarse para cada directamente de las transformadas de Fourier de los registros.
Por tanto, el resultado (3.6.5-3.6.6) es formalmente tan simple como el correspondiente al
método v-SPAC (Aki, 1957) en el sentido de que se requiere un número finito de operaciones
con los sismogramas (aparte del promedio acimutal pesado, idealmente continuo) para eliminar
los efectos de las ondas Rayleigh. En el caso idealizado de una array con una densidad infinita de
estaciones sobre la circunferencia, las fases de los coeficientes de series de Fourier se cancelan al
evaluar (3.6.6), resultando un valor real de B . La función f1 ( x) vale 1 para x = 0 y es continua y
monótonamente decreciente hasta x = 3.83, donde tiene una divergencia, tal como se muestra en
la Fig. 3.6.2a. Esta función es biyectiva si se restringe al intervalo 0 5.14 , y presenta un cero
en x = 1.84. Una expresión explícita para x L2 puede obtenerse para longitudes de onda Love
largas mediante una expansión en serie de Taylor con la estructura x L2 l n ( B 1) n , donde ln
n 1
son números reales:
- 107 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
2
1
1
x L2 4( B 1) ( B 1) 2 ( B 1) 3
( B 1) 4 ... ( B 1)
3
18
540
(3.6.7)
Esta serie no es válida para B > 1 debido a la discontinuidad de f1 ( x) en x = 3.83. La Fig.
3.6.3 es un ejemplo del cálculo directo de xL a partir de B en un intervalo amplio usando varias
series potencias (series de Taylor y de Laurent).
3.6.2. OBTENCIÓN DE LA VELOCIDAD DE ONDA RAYLEIGH
De modo análogo, un método para la determinar la velocidad de onda Rayleigh puede deducirse
a partir de las Ecs. (3.6.1) a (3.6.3) y de la definición (3.6.6):
g ( x R , B)
f 0 (xR )
C ( R, )
B( , R) f 1 ( x R ) 1
(3.6.8)
donde se ha definido una nueva cantidad relevante, C , como:
C
iU 0rad ( R, ) W1 ( R, )U1rad ( R, ) W1 ( R, )U rad
1 ( R, )
.
tg
rad
rad
W0 ( R, ) U 1 ( R, )U1 ( R, ) U 1 ( R, )U1tg ( R, )
(3.6.9)
La Ec. (3.6.8) muestra que las características del campo ARm (con m = 0, 1 ) y ALm (con m =
1) y la propiedad del medio se cancelan en el cálculo de C , de modo que esta cantidad
depende solamente de x R y de x L (o de B ), mediante la función g ( x R , B) , que ha sido graficada
en la Fig. 3.6.2b. La función g ( x R , B) es continua en la variable x R hasta 2.40 (primer infinito en
f 0 ) si B 1, o hasta la primera raíz de J1 ( x) 1 / B en otro caso. La cantidad x R puede
despejarse también mediante una expansión en serie de la Ec. (3.6.8). Por ejemplo, una con la
forma x R2 rn ( B) C n , con rn dependiente de B , que vendría dada, para C > 0 y B < 1, por:
n 1
xR2 2(1 B)C
(1 3B)(1 B) 2
3(1 3B)2 (5 62 B 93B 2 ) 3
C (1 B)
C ...
2
96
- 108 -
(3.6.10)
Métodos de autocorrelación espacial.
Figura 3.6.2. (a) Gráficas de las funciones f0 ( x ) y f1 ( x ) . (b) Gráfico de la función g( xR , B ) . (c) Representación
de de las funciones
1 / df1( x ) / dx y f1( x ) /( x df1( x ) / dx ) .
Figura 3.6.3. Resultados obtenidos para xL a partir de B usando diversos desarrollos en serie, alrededor de xL = 0
(azul), xL = 3.83 (verde) y xL = 5.52 (rojo). Los círculos grises representan la relación exacta obtenida evaluando
f1(xL).
- 109 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
3.6.3. PRIMEROS TESTS NUMÉRICOS EN UN MEDIO ESTRATIFICADO
En García-Jerez et al. (2008b), el método SCA ha sido estudiado y comparado con el método 3cSPAC en un campo de ondas sintético realista generado por una distribución aleatoria de fuentes
puntuales aplicadas sobre la superficie libre. En estos experimentos numéricos usamos dos arrays
diferentes compuestas de 9 sensores virtuales, cuyas formas se muestran en la Fig. 3.6.4. Si los
efectos de las ondas internas son despreciados, los registros grabados en cualquier estación de la
array debidos a una fuente puntual armónica pueden calcularse a partir de los parámetros
elastodinámicos del suelo siguiendo a Harkrider (1963, 1964). Para la simulación se usó la
misma estructura simple empleada en los tests del DR (Tabla 3.5.1). El radio de la array, R, fue
de 100m (igual que el espesor de la capa). En la práctica, el rango de profundidades sondeado
estará limitado, además de por el radio, por el espectro de la fuente y el efecto de filtro pasa-alta
de las capas blandas superficiales (ver p. e., Scherbaum et al. 2003). Se distribuyeron
aleatoriamente un conjunto de 1000 fuentes impulsivas a distancias del centro de la array entre
3R y 10R (Fig. 3.6.4a). Los tiempos origen fueron seleccionados aleatoriamente para cada fuente
puntual, en un rango tal que las señales que se propagan con las velocidades de grupo máxima y
mínima alcancen la array en el intervalo temporal entre t = 0s y t = 550s. La frecuencia máxima
considerada en el paso anterior fue 4.1 Hz. Las fuentes puntuales fueron generadas con
direcciones y amplitudes arbitrarias con probabilidad uniforme, si bien, las amplitudes se
acotaron dentro de un rango predeterminado. Los sintéticos se calcularon usando programas de
elaboración propia basados en el método de Harkrider (1963) y teniendo en cuenta sólo los
modos fundamentales de las ondas superficiales. Como ejemplo, en la Fig. 3.6.4b se muestran los
registros sintetizados en el centro de la array. Las señales fueron seguidamente convolucionadas
en el dominio de la frecuencia con 10 ventanas de Hanning, de 100s de ancho, centradas en los
tiempos múltiplos de 50s hasta t = 500s (hubo un solapamiento del 50 % entre ventanas
contiguas). A continuación, los sismogramas sintéticos fueron analizados, para cada ventana, en
base a las ecuaciones (3.6.5) y (3.6.8). Las cantidades B y C en las en las ecuaciones anteriores
fueron remplazadas por las partes reales de los valores obtenidos con (3.6.6) y (3.6.9).
Los coeficientes B y C se muestran en las Figs. 3.6.4c y d respectivamente. Las velocidades de
fase de las ondas Rayleigh y Love fueron acotadas, para cada frecuencia, aplicando un método de
búsqueda en cuadrícula (grid search) a las ecuaciones (3.6.5) y (3.6.8). En las Figs. 3.6.4d y
3.6.4f se muestra, en escala de grises y para cada celda, el número de ventanas en que se
encontró una solución en el intervalo. Como se muestra, los efectos de longitud de ventana finita
y de las fuentes cercanas son amplificados por la poca pendiente de las curvas f1( xL ) y g( xR , B )
- 110 -
Métodos de autocorrelación espacial.
a bajas frecuencias (ver Fig. 3.6.2a y c) generándose mayores desviaciones. También se advierten
los efectos del aliasing direccional y/o de la no-unicidad de las soluciones, por encima de 2.9 Hz
para ondas Love y de 2.2 Hz para ondas Rayleigh. En un caso práctico, debería reducirse el
tamaño de la array o incrementarse el número de sensores para mejorar las curvas por encima de
estas frecuencias. Generalmente, la primera opción es más adecuada, ya que las formas de f1 ( xL )
y g( xR , B ) son más simples para xL y xR pequeños. La aplicación del método 3c-SPAC para los
datos sintéticos generados en el montaje de la Fig. 3.6.4a se muestran en la Fig. 3.6.5. En este
caso, las ecuaciones (3.4.2) y (3.4.3) se combinan, eliminando ( ) y despejando tg ( ) , en
una ecuación de la forma tg h( rad , xR , xL ) que se resolverá junto a (3.4.1). Para ello, se buscan
primero, y para cada frecuencia, todas las posibles soluciones para x R dentro del intervalo de
lentitudes considerado resolviendo (3.4.1). Seguidamente, estas soluciones se introducen en la
ecuación anterior para calcular el conjunto de raíces posibles para x L . Las Figs. 3.6.4f y 3.6.5e
muestran que la exactitud en las determinaciones de la velocidad de onda Rayleigh mediante el
método de Aki, que saca provecho de la ausencia de las ondas Love en la componente vertical, es
mejor que la del método propuesto, principalmente en la banda de frecuencias bajas. Por otra
parte, el método SCA da resultados muy precisos para la velocidad de onda Love, con algunas
ventajas a altas frecuencias debidas a la ausencia de soluciones cercanas de la Ec. (3.6.5) y al
mejor muestreo acimutal logrado al trasladar la estación central a la circunferencia (Figs. 3.6.4e y
3.6.5d).
Se realizó un segundo experimento numérico relajando la condición de fuentes lejanas, de modo
que sólo el área encerrada en la array estuvo libre de fuentes (ver Figs. 3.6.4a y 3.6.6). Estos
escenarios no fueron considerados en la formulación del método, esperándose resultados
desviados. La comparación de la curva de dispersión estimada con la verdadera confirma que su
calidad empeora, principalmente en las frecuencias bajas. Por tanto, la recomendación de evitar
fuentes cercanas en las medidas de microtremor mediante array (p. e., SESAME 2005) sigue
siendo válida para el método SCA. En estas simulaciones numéricas, los métodos SCA y 3cSPAC se han aplicado independientemente sobre ventanas temporales de 100s de duración con
objeto de obtener valores medios y desviaciones típicas de los coeficientes B , C , tg , rad y V
(se promedian los resultados de estos coeficientes para cada ventana). En secciones anteriores (p.
e. sección 3.3) se discutió que esta manera de proceder no es óptima, siendo preferibles otras
implementaciones en las que se realiza un solo cociente entre cantidades previamente
- 111 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 3.6.4. (a) Distribución de fuentes aleatorias (puntos) generadoras del campo de microtremor simulado con
distancias de hasta 1km desde el centro de las arrays de nueve sensores. Las posiciones de las estaciones se
muestran con triángulos. La array de nueve estaciones empleada para el método 3c-SPAC (Fig. 3.6.5) se muestra en
la esquina superior izquierda. Las fuentes localizadas en el interior de la arrays no fueron consideradas en la
simulación. La distancia 3R se indica con una circunferencia en línea continua. (b) Registro sintético de
microtremor en el centro de la array. (c) Coeficientes B (círculos) calculados a partir de los registros sintéticos. La
línea continua muestra f1(xL) calculado a partir de la velocidad teórica de onda Love. (d) Coeficiente C calculado a
partir de los registros sintéticos. (e) Soluciones para la curva de dispersión Love de fase calculadas a partir de B().
La escala de grises muestra la estabilidad de las soluciones para el conjunto de ventanas temporales. La curva de
dispersión verdadera se muestra con una línea discontinua. (f) Velocidad de fase de onda Rayleigh (zona en escala
de grises) calculada a partir de B() y C( ). La curva teórica se muestra en línea discontinua. Aunque la resolución
en frecuencia es 0.01 Hz, B() y C( ) han sido diezmados en las figuras (c) y (d) para mayor claridad.
- 112 -
Métodos de autocorrelación espacial.
Figura 3.6.5. (a) Coeficiente de correlación radial rad obtenido a partir de registros sintéticos de microtremor. (b)
Coeficiente de correlación tangencial tg. (c) Coeficiente de correlación de las componentes verticales V. El cálculo
a partir de la curva de dispersión teórica se muestra con una línea continua. (d) Curva de dispersión de onda Love
calculada a partir de V( ), rad() y tg( ) usando 3c-SPAC (escala de grises). La curva teórica se muestra con una
línea discontinua. (c) Curva de dispersión de velocidad de fase Rayleigh calculada a partir de V() y curva teórica.
Para mayor claridad, los coeficientes de correlación se muestran para algunas frecuencias solamente.
estabilizadas mediante promedio en las ventanas. Estos algoritmos robustos, ya descritos para los
métodos 3c-SPAC (Ecs. 3.3.2, 3.4.16-17) y DR (3.5.5), pueden plantearse también para el
método SCA. Ése será el objetivo del siguiente epígrafe.
3.6.4. IMPLEMENTACIÓN ROBUSTA DEL MÉTODO SCA PARA ONDAS LOVE
Como se ha visto, el método SCA no es más que un modo de “despejar” la velocidad de fase de
las ondas superficiales bajo la incidencia de un conjunto arbitrario de ondas Rayleigh y Love
grabadas en una array circular sin estación central. Sin embargo, la aplicación óptima a registros
reales de ruido ambiental requiere una implementación cuidadosa del método, definiendo
cantidades apropiadas para ser promediadas en el tiempo y minimizando el número de cocientes
espectrales a evaluar para mejorar la estabilidad de la solución. El objetivo, siguiendo a GarcíaJerez et al. 2010, es encontrar cómo el método puede aplicarse al microtremor de forma robusta
cuando éste está definido como un campo aleatorio. Si el campo de ondas fuera estacionario,
- 113 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 3.6.6. Comparación entre curvas de dispersión Love (izquierda) y Rayleigh (derecha) obtenidas mediante el
método SCA (arriba) y el método 3c-SPAC (abajo) con y sin fuentes cercanas. La distribución de fuentes se muestra
en la Fig. 3.6.4a. Los resultado obtenidos con fuentes situadas a distancias del centro mayores de R (i. e. pueden
estar situadas inmediatamente fuera de la array) se muestran con triángulos. Los obtenidos a distancias mayores de
3R se muestran con puntos. Las líneas continuas muestran las curvas calculadas directamente a partir del modelo de
tierra. Los coeficientes de correlación se muestran sólo para algunas frecuencias.
el procedimiento debería permitir una conexión sencilla con las cantidades que se definen
generalmente para estos procesos (i. e. las densidades espectrales frecuencia-dirección de la
señal y las potencias de ruido no correlacionado) y debería probar un comportamiento robusto en
simulaciones y en tests con datos reales. El intento más sencillo de definición para un proceso
aleatorio sería calcular el promedio B sobre las distintas realizaciones. Sin embargo, se ha
comprobado que la robustez de esta estimación es peor que la de otras implementaciones
posibles. La existencia de un cociente dentro del valor esperado dificulta su estudio analítico y es
en parte la causa de esa menor estabilidad.
Para obtener tal implementación robusta del método, reescribamos primero la relación
fundamental (Ecs. 3.6.5-6) del siguiente modo:
*
rad
Im[ U tg1W1 U tg1W1 U rad
1 W1 U 1 W1 ]
rad
U rad
1 W1 U 1 W1
2
- 114 -
J 0 ( xL ) J 2 ( xL )
,
J 0 ( xL ) J 2 ( xL )
(3.6.11)
Métodos de autocorrelación espacial.
donde el miembro derecho de (3.6.5) se ha sustituido por una fracción equivalente cuyo
denominador es el módulo cuadrado del antiguo. Recuérdese que el miembro derecho es
equivalente a f1 ( xL ) . Por conveniencia, abreviaremos el numerador y el denominador del
miembro izquierdo de (3.6.11), tras una normalización por 4 2 2 , como
nBII
1
4
2
d BII
*
rad
,
Im[ U tg1W1 U tg1W1 U rad
1 W1 U 1 W1 ]
2
1
4
2 2
(3.6.12)
2
rad
U rad
1 W1 U 1 W1 .
(3.6.13)
rad
El denominador antiguo, U rad
1 W1 U 1 W1 , preservaba la información de fase de los registros
(probablemente aleatoria y uniformemente distribuida), no resultando apropiado para
promediarlo en un conjunto de ventanas. Sin embargo, como d BII es, por definición, una
cantidad positiva, se puede evaluar para un conjunto de ventanas temporales y promediarse a
continuación sin poner en riesgo la estabilidad en el cálculo posterior del cociente en (3.6.11).
Por tanto, se propone definir un estimador apropiado para el término izquierdo de (3.6.11) en el
contexto de campos aleatorios como:
BII
nBII
d BII
.
(3.6.14)
Antes de tomar el cociente en (3.6.14), el numerador y el denominador de BII dependen todavía
de todas las características del campo. De hecho, sus expresiones, para una ventana temporal
dada son (Apéndice III.I):
nBII
2
2
AL1 AR1 AL1 AR1 J12 ( xR )J 02 ( xL ) J 22 ( xL )
2 2
(3.6.15)
d BII
2
2
2
AL1 AR1 AL1 AR1 J12 ( xR )J 0 ( xL ) J 2 ( xL ) .
2 2
(3.6.16)
En base a la ecuación (3.2.45), estas dos expresiones pueden reescribirse en el contexto de
campos aleatorios como (Apéndice III.J):
nBII
d BII
8 4
2
8 4
2
f
f
f Re[ f 2L f 2R* ] J12 ( xR ) J 02 ( xL ) J 22 ( xL ) ,
L R
0 0
2
f Re[ f 2L f 2R* ] J12 ( xR ) J 0 ( xL ) J 2 ( xL ) .
L R
0 0
- 115 -
(3.6.17)
(3.6.18)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Nótese que, a diferencia del método CCA-L, desarrollado por Tada et al. (2009) y que será
esbozado en una sección posterior, nuestro numerador y denominador dependen de f 0R y f 0L , y
no sólo de coeficientes de Fourier de orden superior. Ello implica que BII permanece estable bajo
iluminación isótropa, lo que probablemente representa una superioridad del método SCA en tales
condiciones (ver sección 3.6.8). Por otra parte, existe una posible pérdida de precisión en torno a
los ceros de J1 ( xR ) y en las frecuencias en que las potencias espectrales de ondas Love y
Rayleigh (componente vertical) se anulan.
3.6.5. DESVIACIÓN EN LAS ESTIMACIONES DE BII. EFECTOS DE UN NÚMERO
FINITO DE ESTACIONES.
Al igual que en los métodos tratados anteriormente, el uso de un número finito de sensores en
cualquier array real puede representar una fuente importante de error en las estimaciones de BII
y en las velocidades de onda Love que se derivan. Este efecto se puede expresar como una
dependencia de BII en el comportamiento direccional del campo, que es más acentuada
conforme las longitudes de onda son más cortas en relación al radio. En el caso de los métodos
de análisis de ondas Love, un número de estaciones escaso también implica una dependencia no
deseada en el cociente de potencias Rayleigh-Love y en la velocidad de las ondas Rayleigh. A
continuación, se estudian las desviaciones en las estimaciones experimentales de BII debidas a
este efecto mediante dos aproximaciones alternativas.
Una aproximación numérica sencilla.
Consideremos una array circular sin estación central compuesta de N sensores equiespaciados.
Una primera estimación del alcance que pueden tener los efectos de N finito puede obtenerse
evaluando el método para una única onda plana que incide desde distintos azimuts. García-Jerez
et al. (2008b) realizamos varios tests numéricos variando la dirección de la onda plana entre =
0 (esto es, apuntando a un sensor virtual) y = /N. El campo de ondas estaba compuesto por
componentes Rayleigh y Love. Se probaron varios valores para el cociente entre las velocidades
de ambas ondas y para el cociente de amplitudes. Se muestra, por ejemplo, el caso de una onda
plana con características ARV AL , 1 y cR / cL 0.5 , en el que se encontraron algunas
desviaciones notables para los valores de N menores (Figs. 3.6.7 y 3.6.8). Estos casos serán
abordados en el siguiente epígrafe desde una formulación más general.
- 116 -
Métodos de autocorrelación espacial.
Aproximación analítica.
A continuación, se aborda el cálculo de los efectos de N finito para el caso del estimador BII de
una manera más sistemática, siguiendo García-Jerez et al. (2010).
Figura 3.6.7. B̂ vs. xL y Ĉ vs. xR calculados usando una array circular virtual compuesta por N estaciones
uniformemente distribuidas. El campo de ondas consiste en una única onda plana viajando hacia los azimuts
/(3 N), 2 /(3 N) ó / N
con cR / cL = 0.5, =1 y ARV = AL = 1.
- 117 -
= 0,
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 3.6.8. Desviaciones en xL y xR calculadas para una array virtual de N estaciones (con asterisco) respecto a su
valor verdadero (sin asterisco). Las líneas corresponden a los casos mostrados en la Fig. 3.6.7 con el mismo tipo de
líneas. Se resuelven las ecuaciones (3.6.5) y (3.6.8).
- 118 -
Métodos de autocorrelación espacial.
El primer paso para la aplicación del método SCA de este modo, consiste en la evaluación de
nBII y d BII para el conjunto de ventanas temporales analizado, siguiendo sus definiciones (Ecs.
3.6.12 y 3.6.13). Si nBII y d BII son evaluadas a partir de coeficientes de Fourier desviados
Xˆ m (r , ; ) , serán renombradas como n̂BII y d̂ BII . La versión de BII afectada por efectos de N-
finito se define como:
Bˆ II nˆ BII
dˆ BII .
(3.6.19)
Para relacionar B̂II con las características del campo de ondas, usamos de nuevo que Xˆ m (r , ; )
puede expresarse como la suma de los coeficientes de Fourier no desviados X m jN (r , ; ) , con j
= 0, ±1, ±2,... (Ec. 3.3.14). Entonces, las cantidades n̂BII y d̂ BII pueden ser expresadas como:
nˆ BII
dˆ BII
4
2 2
1
4
2 2
ImU
1
j ,l ,m ,n
U
j ,l ,m ,n
rad
1 jN
tg
1 jN
rad
W1lN U1tg jNW1lN U rad
1 mN W1 nN U1 mN W1 nN
rad
rad
W1lN U1rad
jN W1lN U 1 mN W1 nN U1 mN W1 nN
*
.
,
*
(3.6.20)
(3.6.21)
En este punto, las ecuaciones (3.2.17-18) aportan las relaciones necesarias para expresar (3.6.2021) en términos de cL ( ) , cR ( ) , ( ) y de productos del tipo ATj AXl AYm* AZn* , siendo j, l, m, n
enteros y donde T, X, Y, Z toman valores “R” (Rayleigh) o “L”, (Love).
Las ecuaciones anteriores son también útiles si el microtemor se describe como un campo
aleatorio estacionario. En ese caso, la Ec. (3.2.45) proporciona la conexión entre ATj AXl AYm* AZn* y
los coeficientes de Fourier de las densidades espectrales frecuencia-dirección. Las expresiones
resultantes son algo complicadas, pero el procedimiento puede programarse sin excesiva
dificultad. En el caso particular de un campo isótropo, B̂II puede ser obtenido como una función
de x L , x R y del cociente de potencias Rayleigh-Love, esto es RLR = f 0R f 0L . Alternativamente,
como se vio para el método DR, la dependencia con el RLR puede expresarse como una
dependencia en la energía relativa de las ondas Rayleigh respecto al total en la componente
horizontal, esto es f 0R ( f 0L f 0R ) = RLR / (1+ RLR).
- 119 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
En la Figura 3.6.9 se cuantifican los efectos de N finito en un campo isótropo para arrays
circulares con diferentes números de estaciones equiespaciadas. Las subfiguras de la izquierda
muestran B̂ II para diferentes valores de N, RLR, x L y x R . Los cambios de signo se indican con
líneas negras continuas. Las subfiguras de la derecha muestran la diferencia entre B̂ II calculado
para el RLR indicado y el B̂II correspondiente a RLR =0 (campo libre de ondas Rayleigh). Estas
diferencias también se han graficado frente a x L y x R . En el caso de referencia (RLR=0), B̂ II se
vuelve independiente de x R . Cada subfigura corresponde a un valor del RLR de entre 0.1 (91%
de ondas Love y 9% de ondas Rayleigh) y 1.3 (43% de ondas Love y 57% de ondas Rayleigh).
Este rango se ha elegido de acuerdo con la predominancia de las ondas Love en el microtremor
encontrada en la mayoría de los estudios empíricos (ver Capítulo I). En el caso pentagonal (N=5)
se aprecia una dependencia muy ligera de B̂ II en el RLR en la región xR xL hasta xL 2.6
(esto es, para cR cL o por debajo de los segmentos diagonales marcados en blanco en las
subfiguras de la derecha). La situación aún mejora cuando c R / c L se incrementa. Por ejemplo, si
xR / xL 0.75 , B̂ II presenta variaciones dentro de ±0.1 hasta xL 3.65 cuando RLR varía en el
rango completo 0.1 < RLR <1.3. Este caso está también marcado en la figura con un segmento
blanco. Los tests con 7, 9 y 11 estaciones muestran una incremento gradual de la capacidad para
el rechazo de las ondas Rayleigh (bandas verdes en las subfiguras de la derecha de tamaño
creciente o, equivalentemente, dependencia en x R disminuyendo en todas las subfiguras). De
nuevo, la zona xR xL mejora con más rapidez conforme N aumenta.
Los tests realizados con una onda plana con xR 2 xL en el epígrafe anterior (Fig. 3.6.7)
mostraban una inestabilidad significativa a ( xL , xR ) = (1.6, 3.2) para N = 5, RLR =1 y =12º (y
para otros azimuts equivalentes). Ahora se puede comprobar (no se muestra) que el
comportamiento de B̂ II en este punto se suaviza rápidamente conforme el intervalo acimutal del
que proviene la iluminación crece, aunque alguna distorsión puede distinguirse incluso bajo un
campo isótropo. Ese punto ha sido marcado con una estrella en la Fig. 3.6.9 (en el caso próximo
RLR =0.9), confirmando que está situado en un área donde los efectos de N finito son
importantes. Aunque situaciones como la descrita, en las que la onda Rayleigh sea
considerablemente más lenta que la Love, pueden representar una dificultad para la aplicación de
esta metodología con un número limitado de estaciones, estas son probablemente irrelevantes en
la práctica.
- 120 -
Métodos de autocorrelación espacial.
Rg rechazada
Rg rechazada
Rg rechazada
Rg rechazada
- 121 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 3.6.9. Variaciones y desviaciones en B̂II debidas a la presencia de ondas Rayleigh. Se supone un campo de
ondas isótropo. Cada panel corresponde a un número de sensores en la array (N) y a un cociente de potencias
Rayleigh/Love RLR. Los paneles de la izquierda muestran B̂II , mientras que los de la derecha muestran su variación
respecto al resultado obtenido para RLR=0 (para el mismo N). Las líneas negras delgadas en los paneles de la
izquierda muestran los cambios de signo en B̂II (ceros y divergencias). Las líneas blancas horizontales muestran las
posiciones de los ceros de J1(xR). Las posiciones de las divergencias de B̂II en el caso N (divergencias en el
miembro derecho de la Ec. 3.6.11, o, equivalentemente, raíces de J1(xL) = 0) están marcadas con líneas blancas
verticales. Las líneas grises continua y punteada en los paneles de N=5 muestran la relación entre xR y xL para el test
numérico realizado en la sección 3.6.7 y para el experimento real correspondiente a R=50m (sección 5.3.4),
respectivamente.
3.6.6. EFECTO DEL RUIDO INCOHERENTE
Como se hizo para el método DR, la robustez del método SCA en presencia de ruido no
correlacionado se puede investigar de forma analítica (García-Jerez et al., 2010). Los resultados
se exponen a continuación.
Siguiendo un esquema similar al de Cho et al. (2006b), basaremos el tratamiento del ruido en las
mismas hipótesis formuladas en la Sección 3.5.4. con la salvedad de que aquí se van a distinguir
densidades espectrales de potencia distintas para el ruido grabado en las componentes
horizontales y verticales, que serán representadas como PH( n ) ( ) y PV( n ) ( ) respectivamente. Los
efectos del ruido no correlacionado se revelan mediante la aparición de términos aditivos en los
estimadores de n̂B
II
y d̂ BII . Llamamos nˆ BII
( sn )
y dˆ BII
( sn )
a las cantidades anteriores
cuando están afectadas por el ruido (esto es, incluyendo señal y ruido). Se demuestra que éstas se
pueden expresar de la siguiente forma (Apéndice III.K):
nˆ BII
dˆ BII
( s n)
( s n)
nˆ BII
2 ( n )
*
*
PV Re[i Uˆ tg1Uˆ rad
Uˆ tg1Uˆ rad
]
1
1
N
32
dˆ BII
PV( n ) PH( n )
2
N
2 ( n ) ˆ ˆ * ˆ ˆ *
2 ( n ) ˆ rad ˆ rad* ˆ rad ˆ rad*
PH W1W1 W1W1
PV U 1 U 1 U 1 U 1
N
N
(3.6.23)
4
(3.6.24)
Todos los coeficientes de series de Fourier en los miembros derechos de (3.6.23) y (3.6.24) son
evaluados en la situación libre de ruido. Finalmente, el estimador “ruidoso” de B̂II es
- 122 -
Métodos de autocorrelación espacial.
directamente Bˆ II( s n ) nˆ BII
( sn)
/ dˆ BII
( sn)
. Una vez más, los términos en (3.6.23-24) que
involucran promedios de registros pesados pueden reescribirse como funciones de las
características del medio cL ( ) , cR ( ) , ( ) y productos del tipo AXj (; ) AYl* (; ) (con j, l
enteros y X,Y valiendo R ó L). Primero, las cantidades Xˆ m (r , ; ) son sustituidas por
X
j
m jN
(r , ; ) , donde X representa Urad, Utg o W; seguidamente se remplazan (3.2.16-18). En
el caso particular de un campo de ondas aleatorio estacionario, estos cálculos conducen a:
i
2
*
Uˆ tg1Uˆ rad
Uˆ 1tgUˆ 1rad* 2 2
1
1
2
1
2
i
N
8
Wˆ1 Wˆ1* Wˆ 1Wˆ *1 2
2
ˆ rad* 2 2
Uˆ 1radUˆ 1rad* Uˆ rad
1 U 1
{Re[ fRN ]h,1N, 1 ( xR ) Re[ fLN ] h,1N, 1 ( xL )} ,
i
N
i
N
Re[ fRN ] g , N ( xR ) ,
(3.6.25)
(3.6.26)
{Re fRN h,1N, 1 ( xR ) Re fLN h,1N, 1 ( xL )} , (3.6.27)
donde las funciones g , N ( x) y hs1, N,s2 ( x) se han definido como:
g , N ( x)
J
( l ) N 1
l
( x) J lN 1 ( x)
(3.6.28)
y
s1 , s2
,N
h
( x)
J
l
( l ) N
( x) s1 J ( l ) N 2 ( x) J lN ( x) s2 J lN 2 ( x) ,
(3.6.29)
con s1 y s2 tomando valores -1 ó +1. Este último paso requiere usar (3.2.44) para introducir los
coeficientes de Fourier de las densidades espectrales frecuencia-acimut. Los términos
imaginarios en (3.6.26) y (3.6.27) se cancelan debido a las propiedades g , N ( x) g , N ( x) y
hs1, N, s2 ( x) hs2 ,,sN1 ( x) . En el caso particular de un campo isótropo, Bˆ II( s n ) puede reescribirse como
una función de sólo tres cantidades, aparte de N, x L y x R . Estas son: los cocientes espectrales
entre la energía del ruido y la de la señal para las componentes horizontal (NSRH) y vertical
(NSRV), definidos como NSRH= PH( n)
f
R
0
f 0L
y NSRV= PV( n ) 2 f 0R , así como el cociente
energético Rayleigh-Love (RLR = f 0R f 0L ).
- 123 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
3.6.7. COMPROBACIÓN DE LAS FORMULACIONES ANALÍTICAS PARA B̂ II Y Bˆ II( s n )
EN UN EJEMPLO NUMÉRICO.
Simulación de los efectos de N finito
En esta sección, el procedimiento descrito bajo (3.6.20-21) para reproducir los efectos de N finito
y las Ecs. (3.6.23-27) que dan cuenta de los efectos del ruido no correlacionado son mostrados y
chequeados mediante un ejercicio numérico. Para ello se empleará el modelo simple listado en la
Tabla 3.5.1, que ya fue usado en la comprobación del método DR. Se asume propagación de los
modos fundamentales. La figura 3.6.11a muestra las velocidades de fase de ondas Rayleigh y
Love para el modo fundamental así como la elipticidad de la onda Rayleigh, mientras que la Fig.
3.6.11b muestra la dependencia de B̂II con la frecuencia para arrays formadas por de 3 a 7
sensores con radio virtual de 250m, iluminadas isótropamente y un RLR de 0.2.
Figura 3.6.11. (a) Curvas de dispersión y elipticidad ( ) del modo fundamental, para el modelo de suelo listado en la
Tabla 3.5.1. (b) Coeficiente de SCA B̂II calculado a partir de las curvas del panel (a) para una array virtual
consistente en N estaciones uniformemente distribuidas sobre una circunferencia de 250m de radio. Se asumió
campo de ondas isotrópo y una relación de potencias Rayleigh / Love (RLR) de 0.2.
En la Figura 3.6.11 se aprecia que, contrariamente al método 3c-SPAC (y análogamente al DR),
B̂ II no converge al caso N = (término derecho de Ec. 3.6.11 y línea gris en Fig. 3.6.11b)
cuando el campo tiende a ser isótropo, sino sólo cuando el número de estaciones crece (“a
cambio”, nuestro caso N = depende exclusivamente de cL y no de cR o del RLR). Como se
muestra, las distintas estimaciones de B̂II correspondientes a N > 4 permanecen similares hasta
cerca del primer mínimo ( xL 3.83 ), mientras que, a frecuencias superiores, las curvas difieren,
siendo todas más suaves que en el caso N = . A la vista de esta figura, se necesitaría una array
de, al menos, cinco sensores con objeto de mantener los efectos de N finito despreciables en un
- 124 -
Métodos de autocorrelación espacial.
rango considerable de longitudes de onda. También se aprecia que una array hexagonal ajusta un
rango de la curva N = mucho mayor que el correspondiente a una array triangular. Este
resultado es diferente al que se obtuvo para el método 3c-SPAC (ver sección 3.4.3). En la
aplicación del 3c-SPAC a una array hexagonal se observó que las correlaciones entre la estación
central y dos vértices opuestos daban información equivalente (para procesos estacionarios).
Como el método SCA involucra a las correlaciones entre todas las parejas de estaciones de la
array, las estaciones diametralmente opuestas a otras ya no son prescindibles.
En la Figura 3.6.13, se muestran los efectos de un número finito de estaciones para una array
compuesta de 5 sensores uniformemente distribuidos bajo una iluminación anisótropa con una
dirección de propagación dominante. Las funciones f R (, ) y f L (, ) son las mismas
usadas en las Secciones 3.5.5-6, con una dependencia “triangular” en el azimut (Fig. 3.6.12), por
tanto, las expresiones de f mL ( ) y f mR ( ) pueden ser evaluadas analíticamente. Tras ello, las
formas teóricas de n̂B
II
, d̂ B
II
y B̂II pueden obtenerse a partir de las Ecs. (3.6.19) a (3.6.21) y
(3.2.45). Para este ejercicio, se ha tomado el mismo tamaño de la array y el mismo RLR que en la
Fig. 3.6.11b.
Figura 3.6.12. Esquema de una array pentagonal apropiada para la aplicación del método SCA.
Los símbolos de la esquina superior izquierda representan una densidad de potencia espectral
frecuencia-dirección con dependencia triangular en el acimut, de anchura y potencia máxima
hacia propagándose hacia la dirección .
- 125 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Las series en las ecuaciones (3.6.20) y (3.6.21) se han truncado en j, l, m, n = ±5, comprobando
que los términos de órdenes superiores tienen poca influencia dentro del rango de frecuencias
mostrado. Las líneas delgadas en las figuras 3.6.13e-h muestran estos resultados analíticos para
valores del ancho del haz de 2º, 30º, 60º y 90º y distintas direcciones de iluminación. La línea
gris muestra el caso de campo isótropo.
Además, cada situación ha sido modelada usando un conjunto de ondas planas con amplitudes
dependientes del azimut, tal como se explico en la Sección 3.5.5 (ahora hay que considerar la
componente vertical también). Los registros fueron sintetizados en las posiciones de las
estaciones virtuales y promediados siguiendo (3.3.13) para estimar después n B y d B a partir de
II
II
sus definiciones (Ecs. 3.6.12-13). Seguidamente, ambas cantidades fueron promediadas sobre
500 realizaciones en las que las fases de las ondas Rayleigh y Love se variaron aleatoriamente.
Finalmente, B̂ II se calcula como el cociente de los valores medios n̂B
II
y d̂ BII
y se muestra
en las Figs. 3.6.13a-d usando distintos símbolos según el azimut central del haz. La comparación
entre los resultados numéricos (a-d) y analíticos (e-h) apoya la validez de los desarrollos teóricos
y muestra que el número de fuentes (muestreo acimutal) y el número de ventanas promediadas
en el test numérico son suficientes. Para un ancho de haz de 30º, B̂ II permanece estable ante
variaciones en la dirección de las ondas sólo en el rango de 0 a 1.25 Hz ( x L hasta 2.62). La
situación mejora considerablemente conforme la anchura acimutal de la iluminación crece, de
hecho, B̂ II llega a ser casi insensible a la dirección del haz hasta 2.3 Hz ( x L = 6.32) cuando éste
tiene un ancho de 60º.
Simulación del ruido no correlacionado
La Figura 3.6.14 muestra Bˆ II( s n ) vs. f para esa misma array pentagonal, calculado para las curvas
de dispersión y el campo de ondas isótropo usado en la Fig. 3.6.11. Se asume aquí que la relación
ruido-señal es la misma para las componentes horizontal y vertical. Como era de esperar, la
presencia de ruido conlleva un aplanamiento de Bˆ II( s n ) . El límite de Bˆ II( s n ) para frecuencia cero
depende de NSRH (no de NSRV) y del número de estaciones, en concreto, su valor es
1 1 4 NSRH N . Aunque no se muestra, los efectos del ruido no correlacionado disminuyen,
para cualquier frecuencia, conforme aumenta el número de estaciones como se pone en evidencia
en (3.6.23) y (3.6.24). Se podría demostrar que las posiciones de los ceros del coeficiente de vSPAC permanecen inalteradas cuando se varía la energía del ruido no correlacionado ( PV(n ) ) (ver
Cho et al. 2006b). Por el contrario, este efecto favorable no se da para el método SCA, si bien las
- 126 -
Métodos de autocorrelación espacial.
Figura 3.6.13. Subfiguras (a) hasta (d): B̂II vs. f modelados para la estructura de suelo mostrada en la Tabla 3.5.1 y
un campo de ondas compuesto de una suma finita de ondas planas con fases aleatorias. Cuatro anchos acimutales
fueron probados para la iluminación: 2º, 30º, 60º y 90º. Los diferentes símbolos corresponden a distintos acimuts
centrales del haz triangular incidente: 0º, 9º, 18º, 27º y 36º, considerando que siempre uno de los cinco sensores está
colocado en el acimut 0º. La línea gruesa gris muestra el caso de campo de ondas isótropo. El radio de la array
virtual fue de 250m. Se asumió la predominancia de los modos fundamentales y un RLR de 0.2. Paneles (e) hasta
(h): soluciones teóricas de B̂II para las respectivas densidades espectrales de potencia frecuencia-dirección,
triangulares y continuas.
- 127 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
variaciones en los ceros son difíciles de apreciar en la Fig. 3.6.14 y muy pequeñas en todas las
demás simulaciones realizadas (se necesitarán nuevos esfuerzos analíticos para entender y
encontrar cotas para esas variaciones).
Figura 3.6.14. Efectos del ruido no correlacionado sobre B̂II , calculado para el modelo de estructura listado en la
Tabla 3.5.1 bajo iluminación isótropa (considerando que los modos fundamentales fueran dominantes). Se asume
que las relaciones de potencia ruido/señal (NSR) son iguales para todas las estaciones y componentes. El resto de las
características de la array y del campo fueron: N=5, R =250m y RLR=0.2.
La Figura 3.6.15 muestra el efecto combinado del ruido no correlacionado y del número finito de
sensores en los mismos casos mostrados en la Fig. 3.6.13. Las relaciones ruido señal han sido
fijadas en NSRH=0.3 y NSRV=0.2. El ruido incoherente ha sido simulado sumando términos con
amplitud
PH(n ) o
PV(n ) y fases arbitrarias a las transformadas de Fourier de los registros de
cada estación virtual, componente y ventana temporal (realización). La gran similitud entre los
resultados teóricos (subfiguras e hasta h) y sus correspondientes simulaciones (subfiguras a hasta
d) confirma la rápida convergencia de las series existentes en las Ecs. (3.6.25) a (3.6.27), que han
sido evaluadas hasta orden ±7 en , dentro del rango de frecuencias estudiado.
3.6.8. COMPARACIÓN CON LOS MÉTODOS CCA-L Y DR.
Comparación con el método CCA-L.
Tada et al. (2009, 2010) han desarrollado recientemente tres métodos que, como el SCA,
permiten el cálculo de velocidades de fase de ondas Love de modo “directo” (i. e. sin determinar
- 128 -
Métodos de autocorrelación espacial.
Figura 3.6.15. Similar a la Fig. 3.6.13 excepto por la presencia de ruido no correlacionado con intensidades
determinadas por NSRH=0.3 y NSRV=0.2.
previamente o simultáneamente la curva de dispersión Rayleigh) con una array circular. Estos
métodos, denominados SPAC+L, SPAC-L y CCA-L, se pueden resumir en las siguientes
ecuaciones:
SPAC L
SPAC L
GU rad 1U tg 0 ( R, R, )
GU rad 1U tg 0 (0, R, )
GU tg 1U tg 0 ( R, R, )
GU tg 1U tg 0 (0, R, )
CCAL i
J 0 ( xL ) J 2 ( xL )
(3.6.30)
J 0 ( xL ) J 2 ( xL )
(3.6.31)
GU tg 1U tg 0 ( R, R, )
GU rad 1U tg 0 ( R, R, )
J 0 ( xL ) J 2 ( xL )
J 0 ( xL ) J 2 ( xL )
- 129 -
(3.6.32)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Comparados con el SCA y con el 3c-SPAC, llama la atención su relativa simplicidad, al no
precisar de los registros de componente vertical. El método CCA-L es el único de los tres que
comparte con el SCA la disposición de los sensores (circunferencia sin estación central) de modo
que se puede hacer una la comparación entre ambos.
La figura 3.6.16 muestra la comparación numérica para el modelo de la Tabla 3.5.1, realizada de
un modo análogo al descrito en la sección anterior. En las subfiguras de la izquierda se usa un
campo casi isótropo mientras que en las de la derecha hay un rango de azimuts dominante (de
90º de anchura). Los tests fueron repetidos con y sin ruido no correlacionado. Las conclusiones
que se extraen de esta figura son las siguientes: i) el método SCA muestra una sensibilidad al
ruido no correlacionado bastante estable ante variaciones en la distribución de fuentes; ii) el
método CCA-L es casi insensible al ruido si el campo de ondas tiene una dirección dominante;
iii) el método CCA-L muestra importantes efectos de N finito (incluso a longitudes de ondas
largas) bajo iluminación aproximadamente isótropa que no se observan para el SCA; iv) el
método CCA-L es incapaz de estimar velocidades de fase en presencia de ruido y/o de errores
estocásticos en el caso de un campo de ondas aproximadamente isótropo.
Figura 3.6.16. (a): B̂II (círculos) y Bˆ II( sn ) (cuadrados) modelados para la estructura de la Tabla 3.5.1 y una array
pentagonal de radio R = 250m. Se asume propagación de los modos fundamentales e iluminación cuasi-isótropa. Las
líneas continuas muestran los resultados teóricos. La línea discontinua es el resultado teórico para una array
- 130 -
Métodos de autocorrelación espacial.
infinitamente densa. (b) Lo mismo que (a) pero para una iluminación triangular (Fig. 3.6.12) con las características
indicadas en el título. (c) Coeficientes de CCA-L (Tada et al., 2009) con (cuadrados) y sin (círculos) ruido no
correlacionado, para el caso de campo de ondas isótropo. (d) Lo mismo que en (c) pero para la iluminación
anisótropa que se usó en (b). El resto de las características del campo, del ruido y de los promedios (RLR, NSRH,
NSRV y número de realizaciones) son los mismos que en la Fig. 3.6.15.
Como se avanzó en la sección 3.6.4, las dificultades del CCA-L ante campos isótropos y
aproximadamente isótropos se deben a que el numerador y el denominador del término central
de (3.6.32) son proporcionales a una componente del desarrollo en serie de Fourier de la
densidad
espectral
frecuencia-dirección
de
orden
superior
a
cero.
Concretamente
GU tg 1U tg 0 ( R, R, ) f1L ( ) y GU rad1U tg 0 ( R, R, ) f1L ( ) . Esto conlleva que el método presente
una inestabilidad de tipo 0/0 en esas circunstancias para todas las frecuencias. La misma
limitación, que fue predicha por Tada et al. (2009), se repite para los métodos SPAC+L y SPACL.
Comparación con el método DR.
Para optar entre la aplicación de los métodos DR y SCA se han de valorar distintos factores. Por
una parte, las hipótesis subyacentes son más restrictivas para el método SCA, pues la aplicación
del método DR no requiere la correspondencia entre las velocidades de fase de onda Rayleigh (y
por ende, de los modos predominantes) medidas en las componentes horizontal y vertical (de
hecho, no se necesitan registros verticales). Salvado esto, y a igual número total de estaciones
(supuestas triaxiales), el método SCA resulta mucho más estable que el DR a valores bajos de xL,
en el sentido de ser menos dependiente de la velocidad de onda Rayleigh y del RLR. Esta
propiedad puede apreciarse en la Fig. 3.6.17, en la que se comparan los errores relativos
propagados a cL con ambos métodos, usados sin información sobre cR ni RLR. Si asumimos que
cL y cR tienen valores similares a cualquier frecuencia, el método SCA sigue siendo generalmente
más estable hasta valores algo mayores de xL (siguiendo la diagonal que pasa por el origen, se
cruza antes una línea roja en las subfiguras de Fig. 3.6.17). Por otra parte, el montaje del método
DR puede resultar más versátil, pues los registros obtenidos se podrían analizar adicionalmente
mediante SCA u otros métodos basados en array circular simple. En equipos con sensores de un
solo canal válidos para registro de componentes horizontales y verticales indistintamente, utilizar
el método DR resulta más económico.
- 131 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 3.6.17. Error relativo propagado a cL para los métodos DR (rojo) y SCA (azul), en montajes de 10 estaciones
(5+5 para el método DR), para distintos valores de xL, xR y del RLR y campo isótropo. En lo referente al método DR,
se supone una relación entre radios de 2 y tanto xL como xR se refieren al radio mayor ( x L k L R2 , x R k R R2 ). Las
líneas continuas, discontinuas y con “· -” representan errores del 5%, 10% y 20% en cL, respectivamente. La
propagación de errores se calcula respecto a los casos RLR=0 (coeficientes ̂ tgDR y B̂II dependientes sólo de xL), p. e.,
para el método CCA se muestra | xL dBˆ II ( xL ,0,0) / dxL |-1 [ Bˆ II ( xL , xR , RLR) - Bˆ II ( xL ,0,0) ].
3.7. CONCLUSIONES DEL CAPÍTULO 3.
Conclusiones generales
Se ha revisado la formulación de diversos métodos tipo SPAC tanto desde una formulación
determinista como desde la más convencional basada en procesos aleatorios estacionarios con
independencia estadística entre ondas de distinto tipo y entre las procedentes de distintas
direcciones.
Se ha llegado a conclusiones sobre aplicabilidad o no de estos métodos en el contexto
determinista. Cabe destacar: i) la demostración de la validez de los métodos v-SPAC y 3c-SPAC
en un contexto determinista; ii) obtención de un análogo complejo ' ( ) de la proporción de
energía en forma de ondas Rayleigh en la componente horizontal; iii) la no equivalencia entre
arrays regulares de N y 2N estaciones para los métodos v-SPAC y 3c-SPAC (incluso si N es
impar; el sensor central no se contabiliza); iv) La falta de validez general del método CCA para
componentes verticales (Ec. 3.3.32). Los métodos CCA-L y SPACL (Tada et al. 2009) tampoco
- 132 -
Métodos de autocorrelación espacial.
son válidos en el contexto determinista.
Se han desarrollado dos métodos orientados al cálculo directo de velocidades de ondas Love:
métodos DR y SCA. Estos métodos son relevantes porque la inversión conjunta de las curvas de
dispersión Rayleigh y Love permitirá disminuir la multiplicidad los modelos de suelo invertidos.
El método DR (Double Ring) necesita una array formada por dos circunferencias concéntricas,
sin estación central, en la que se registre la componente tangencial del movimiento. El método
SCA (Single Circular Array) requiere una array circular, sin estación central, formada por
estaciones de tres componentes.
Teóricamente, el cálculo de la velocidad de fase de la onda Love es más sencillo de
implementar en los métodos desarrollados que en el método 3c-SPAC. En los nuevos métodos se
trata de resolver una ecuación con una sola incógnita, x L , requiriéndose una elección final entre
distintas raíces. Con el método 3c-SPAC se requiere resolver un sistema de ecuaciones o una
ecuación del tipo tg h( rad , xR , xL ) , donde h es cierta función. En este último caso,
determinaríamos primero xR para cada frecuencia, requiriéndose una doble elección de raíces:
para xR primero y para xL después. Errar en la selección de xR conduce a soluciones erróneas
para x L . Las características y los resultados principales obtenidos para los métodos DR y SCA
fueron:
Sobre el método DR
Es válido tanto en la formulación determinista como en la basada en procesos aleatorios.
Se han obtenido expresiones analíticas que permiten cuantificar los efectos de N finito y del
ruido incoherente, tanto para el método DR como para un método similar (TR) descrito por Tada
et al. (2006).
Comparativamente, el método DR proporciona una determinación unívoca de la longitud de
onda Love en un rango mayor que el del método de TR.
Los efectos de N-finito provocan incertidumbres a longitudes de onda suficientemente cortas
causadas por la direccionalidad del campo y por la propagación de ondas Rayleigh. Se han
representado para campo isótropo, resultando menores para el método DR que para el método
- 133 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
TR.
En cuanto a los efectos del ruido incoherente, el método DR es relativamente insensible a esta
causa de error en un entorno alrededor de kLR2=3.83 (para N suficientemente grande). En el
método de TR, este rango está desplazado a valores más bajos de kLR2 (y dependientes también
de R1).
Sobre el método SCA
Como el anterior, el método SCA puede usarse para el análisis de casi todo tipo de campos de
ondas superficiales: con o sin correlación entre ondas Love y Rayleigh o entre ondas
prevenientes de distintos acimuts y para distribuciones de fuentes isótropas y anisótropas. Por
tanto, el método SCA es, en principio, más versátil que otras técnicas de array circular única
(como el método CCA-L, Tada et al., 2009).
Una implementación del CCA basada en el estimador BII , definido aquí, ha mostrado un
comportamiento robusto con datos sintéticos, siendo todavía suficientemente simple como para
permitir el estudio analítico de su comportamiento ante varias limitaciones experimentales.
Se han obtenido e implementado un conjunto de formulas que permiten calcular los efectos de
usar un número finito de estaciones, incluyendo también la descripción en términos de los
coeficientes de serie de Fourier de las densidades espectrales de potencia frecuencia-dirección de
ondas Rayleigh y Love. Se han dado también las expresiones que permiten tener en cuenta los
efectos del ruido incoherente en B̂ II tanto en campos de onda deterministas como en aleatorios
estacionarios. Estas relaciones, que proporcionan información útil sobre la aplicabilidad del
método, han sido testadas exitosamente con simulaciones numéricas de B̂ II y Bˆ II( s n ) para un
modelo de suelo simple y bajo incidencia de ondas superficiales planas.
Los tests numéricos confirman que la estabilidad de B̂ II ante variaciones de los acimuts de las
fuentes se incrementa conforme lo hace el ancho de los haces de ondas. En tests numéricos, una
array pentagonal proporcionó resultados estables hasta x L = 6.32 para una iluminación
procedente de un intervalo acimutal de 60º de anchura. Se necesita más investigación para
confirmar estos resultados en modelos de suelo más generales.
- 134 -
Métodos de autocorrelación espacial.
3.8. APÉNDICES DEL CAPÍTULO 3.
Apéndice III.A. Representación espectral del campo de ondas aleatorio estacionario y
relación con la descripción determinista.
Las expresiones (3.2.23-24) involucran integrales definidas en el sentido de Riemann-Stieltjes,
que son también apropiadas en casos en que ζ R (, ) o L (, ) no sean funciones derivables
en la frecuencia o en el acimut y cuya definición se va a dar a continuación. Nótese que en el
contexto de campos aleatorios estacionarios, ha de evitarse realizar la transformada de Fourier
de una realización completa, por ser esta operación divergente cuando se aplica sobre un registro
que no decae para t , por lo que habrá que dar un significado adecuado a las “componentes
espectrales” de la realización.
Para aclarar el sentido de estas integrales tomaremos, por ejemplo, una realización w p.a. (R, t ) de
la componente vertical del proceso (cuya representación espectral sería III.A.1) y, manteniéndola
inalterada dentro del intervalo temporal [-/2 +/2], definiremos dos funciones relacionadas con
ella: i) la versión truncada de la realización w p.a. (R, t; ) , que se redefine como cero fuera de ese
intervalo, y ii) la extensión periódica w p.a. (R, t; ) , que repite periódicamente el fragmento [-/2
+/2] fuera de él (su periodo es ). Por definición, la integral
p .a.
R
w
( R, t )
( ) exp i t ik
i
R
( )e R d R (, )
(III.A.1)
ha de coincidir con el límite de w p.a. (R, t; ) cuando . En nuestra nomenclatura,
escribiendo la integral como límite de una suma, se sigue (definición de integral de RiemannStieltjes):
w p.a. (R, t ) lim w p.a. (R, t; ) lim
M '
exp[il t ik
M ' l j 1
R
( )e j ·R]
i
(l , j ; , M ' ).
(l ) R
(III.A.2)
En (II.A.2) se está, por una parte, separando w p.a. (R, t; ) en contribuciones debidas a ondas
provenientes de intervalos de azimut contiguos de anchura 2 / M ' que tiende a cero en el
límite. Por otra, se está realizando un desarrollo en serie de Fourier sobre la coordenada temporal
t. Como w p.a. (R, t; ) es periódica en el tiempo, sólo tiene contribuciones para frecuencias que
- 135 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
sean múltiplos enteros de 2 / . El coeficiente de Fourier de orden l de w p.a. (R, t; ) se
define, a partir del registro en el origen, por la integral
1
/ 2
e
il t
w p.a. (0, t; ) dt . Esta integral
/2
corresponde por tanto a la suma acimutal de R (l , ; ) :
/ 2
M'
i
lim R (l , j ; , M ' )
e il t w(0, t; ) dt .
(l ) M ' j 1
2 / 2
(III.A.3)
Alargar la duración de las ventanas (i.e. hacer ) no conduce ya a la divergencia del
miembro derecho de (III.A.3) (ni de III.A.1-2) gracias a la normalización por implícita en el
factor . Si se desea invertir (III.A.1), es decir, formular la transformada inversa, habría que
definir R ( ) para cualquier frecuencia. El modo adecuado de hacerlo, a partir de (III.A.3), es
(p. e. Priestley, 1981):
2
i
R ( )
( )
1
lim
0
l t .q .
2 l
2
1
1 2
/ 2
e
/ 2
i t
M '
1
0
l t .q . 2 l 2 2
lim
2
M'
i
(l ) lim
j 1
R
(l , j ; , M ' )
/ 2
i t
e
w
(
0
,
t
)
dt
/ 2
(III.A.4)
/ 2 i2 t
1
e
e i 1t
w(0, t ) dt d
lim
w(0, t )dt.
2 / 2
it
Relación con la descripción determinista.
Las propiedades (3.2.30-31) de las medidas espectrales también son válidas en términos de
incrementos X ( , ) :
(i’) R (, ) L (, ) 0, ,
(ii’)
(III.A.5)
X* (l , j; , M ' ) Y (l ' , j ' ; , M ' ) XY ll ' jj ' f X (l , j )
(III.A.6)
La relación entre los incrementos R (l , j; , M ' ) y L (l , j; , M ' )
y las
amplitudes complejas ARj ( ) y ALj ( ) (Ec. 3.2.8) resulta clara si extendemos periódicamente
- 136 -
Métodos de autocorrelación espacial.
u(R, t ) para tiempos fuera del intervalo [-/2 +/2]. Realizando un desarrollo en serie de Fourier
sobre la variable t, cualquier expresión determinista del campo así modificada, u(R, t; ) , puede
escribirse como:
u( R, t ; )
1
2
A
M
l j 1
HV
Rj
(l ; )e
il t ik R ( ) e j ·R
A Lj (l ; )e
il t ik R ( ) e j ·R
. (III.A.7)
HV
A HV
Rj (; ) y A Lj (; ) representan las versiones truncadas de A Rj ( ) y A Lj ( ) (en
frecuencias, el truncamiento se realiza como una convolución con el espectro de la ventana
rectangular correspondiente). Centrándonos, por ejemplo, en la componente vertical del campo,
se observa que si los azimuts de las fuentes deterministas (j con j = 1, 2, …, M) coincidieran
con el discretizado del intervalo [0 2] utilizado en la ecuación (III.A.2) (acimuts j con j = 1,
2,
…,
M’;
=
2/M’)
se
podría
establecer
la
equivalencia:
R (l , j; , M ' ) AR, j (l ; ) / . De modo análogo, para ondas Love se tendría
L (l , j; , M ' ) AL, j (l ; ) / . Se puede pues concluir que el campo aleatorio
estacionario descrito por (3.2.23-28) puede tratarse como un caso límite (, M’) de un
proceso aleatorio formado por realizaciones “discretas” compuestas por M’ ondas planas
equiespaciadas en acimut. De (3.A.5-6) se puede concluir que las amplitudes complejas del
proceso “discreto” han de cumplir las propiedades (3.2.29) y (3.2.30), que eran:
AX , j (l ; ) 0
1
AX , j (l ; ) AY* ,k (m ; ) XY jk lm f
2
X
,
donde representa el límite , M’, l, m.
Apéndice III.B. Demostración de las ecuaciones (3.2.44) y (3.2.45)
Considérense los productos de sumas pesadas de amplitudes complejas AXm AYn* y ATm AXn AYp* AZq* ,
donde T, X, Y, Z toma valores R (Rayleigh) o L (Love) y m, n, p, q son enteros, que se ha
definido para un campo de ondas determinista de acuerdo con la ecuaciones (3.2.19-20). Se trata
de obtener la expresión de su valor esperado en el caso de que la iluminación se describa como
- 137 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
un campo aleatorio estacionario.
Considérese, en primer lugar, el caso del movimiento vertical grabado en el centro de la array (R
= 0) para tal campo de ondas aleatorio. La expresión del registro temporal viene dada por la
componente vertical de (3.2.23) (ver por ejemplo, Eq. 18 en Cho et al. 2006b) i. e. por la integral
de Fourier-Stieltjes:
w
p .a .
(0, t )
e
i t
i
d ( , ) .
( ) R
(III.B.1)
Las integrales de esta relación tienen que ser interpretada en el sentido de Fourier-Stieltjes. Por
definición, si esta integral existe, debe coincidir con el límite:
w p.a. (0, t ) lim
M '
e
il t
M ' l j 1
i
(l , j ; ) ,
(l ) R
(III.B.2)
(Priestley, 1981, pp. 247-248) donde 2 / , 2 / M ' .
Por otra parte, en la aproximación determinista usada en esta tesis para el campo de ondas creado
por una superposición de M ondas Rayleigh planas, el registro vertical en R = 0 para -/2< t </2,
es:
w(0, t; )
1
2
M
l j 1
eil t
i
A (l ; )
(l ) R , j
(III.B.3)
(ver p. e. Eq. 4.11.8 en Priestley, 1981 para la dependencia en ).
De la comparación entre (III.B.2) y (III.B.3) observamos que el caso estocástico (III.B.2)
corresponde formalmente al límite , M del caso determinista (III.B.3) para un campo de
ondas consistente en una superposición de M ondas Rayleigh planas provenientes de azimuts
equiespaciados en el rango completo [0 2π) y amplitudes complejas dadas por
AR, j (l ; ) R (l , j; ) . De un modo similar, la representaciones espectrales del
campo aleatorio que involucran a las ondas Love coinciden con las formuladas en el contexto
determinista si L (l , j; ) se remplaza por AL, j (l ; ) / .
Asumiremos independencia estadística entre las ondas que vienen de distintos azimuts y entre
distintos tipos de ondas (Rayleigh y Love). Las siguientes propiedades de las amplitudes
complejas pueden también asumirse por analogía con las de R y L en la descripción de
- 138 -
Métodos de autocorrelación espacial.
campo aleatorio estacionario:
AX , j (l ; ) 0 ,
(III.B.4)
1
AX , j (l ; ) AY* ,k (m ; ) XY jk lm f
2
X
, ,
(III.B.5)
AX , j (l ; ) AX , j (l ; ) 0, l 0 ,
(III.B.6)
donde j, k, l, m son enteros y X significa R (Rayleigh) o L (Love). La ecuación (III.B.4) indica
que el microtremor es un proceso aleatorio estacionario de media nula. La ecuación (III.B.5) es
la relación de ortogonalidad. El límite ,
0 , l ,
j
es
sobreentendido en (III.B.5). Las ecuaciones (III.B.6) pueden demostrarse a partir de la relación
de
ortogonalidad
X (l , j; )
para
X* (l , j; ) X (l , j; ) .
Como
teniendo
en
cuenta
R (, ; ) ~ O O
que
conforme
, 0 (p. e. Priestley, 1981, p. 247 para la dependencia en ; Okada, 2006), se
puede inferir que AX , j (; ) ~ O O .
Demostración de la ecuación (3.2.44)
De sus definiciones, y usando la linealidad del operador · , el valor esperado en la colectividad
de AXm AYn* /( 2 ) pueden escribirse como:
1
2
AXm AYn*
1
2
M
M
e
i mj1 nj2
j1 1 j2 1
AX , j1 (; ) AY , j2 (; )* ,
(III.B.7)
Los sumandos de (III.B.7) en los que las amplitudes complejas son distintas entre sí (X Y y/o j1
j2) se anulan, porque el valor esperado de variables aleatorias estadísticamente independientes
factoriza y vale cero por la Eq. (III.B.4). Por tanto, queda:
1
2
M
AXm AYn* XY e i ( mn ) j
j 1
AX , j (; )
2
2
(III.B.8).
Tras tomar límites 0 (i. e. con el número de fuentes lejanas igualmente distribuidas, M ,
- 139 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
M
tendiendo a infinito) y (con l , j ), el símbolo · puede remplazarse
j 1
d ·. Teniendo en cuenta las definiciones
formalmente por
(3.2.43) y la Ec. (III.B.5), se
obtiene la siguiente relación útil para simplificar el límite de (III.B.8):
M
e i ( mn ) j
j 1
2
1
AX , j (l ; ) e i ( mn ) f X (, )d f mXn ( ) .
2
(III.B.9)
Esto conduce inmediatamente a:
1
2
AXm AYn* XY f mXn .
(III.B.10)
Demostración de la ecuación (3.2.45)
Análogamente, la media en la colectividad de
1
4
2 2
4 2 2
4
2 2
ATm AXn AYp* AZq* pueden escribirse como:
ATm (l ; ) AXn (l ; ) AYp* (l ; ) AZq* (l ; )
M
1
1
M
M
M
e
i mj1 nj2 pj3 qj4
j1 1 j2 1 j3 1 j4 1
(III.B.11)
AT , j1 (l ; ) AX , j2 (l ; ) AY , j3 (l ; ) AZ , j4 (l ; )
*
*
para cualquier l l . Como en el caso anterior, los sumandos de (III.B.11) que tienen al
menos una amplitud compleja no repetida en el producto AT , j1 AX , j2 AY* , j3 AZ* , j4 se anulan porque el
valor esperado de variables aleatorias estadísticamente independientes factoriza y vale cero (Ec.
III.B.4). Como las amplitudes complejas al cuadrado tienen también media nula (Ec. III.B.6), los
únicos términos que contribuyen son aquellos que cumplen T=Y, j1=j3, X=Z, j2=j4 ó T=Z, j1=j4,
X=Y, j2=j3, o ambas (T=X=Y=Z, j1=j2=j3=j4). Esto conduce a:
1
4
2
2
ATm (l ; ) AXn (l ; ) AYp* (l ; ) AZq* (l ; )
M
M
TY XZ e i ( m p ) j ( nq ) j
1
j1 1 j2 1
2
1
2
AT , j1 (l ; )
2
- 140 -
1
2
AX , j2 (l ; )
2
Métodos de autocorrelación espacial.
M
M
TZ XY e i ( mq ) j1 ( n p ) j2
j1 1 j2 1
M
TX XY YZ e
i ( m n p q ) j
j 1
1
2
AT , j1 (l ; )
2
1
2
AX , j2 (l ; )
4
2
1
1
AT , j (l ; ) 2
AT , j (l ; )
2 2
2
4
2
2
.
(III.B.12)
La última suma corrige el cálculo incorrecto del valor esperado para los términos con j1=j2 en el
2
2
caso W=X=Y=Z. En estos términos, los factores AT , j (l ; ) y AX , j (l ; ) son idénticos y han
1
2
de tratarse como variables completamente correlacionadas (p. e. Howard, 2002, p. 105).
Los términos de III.B.12) proporcionales a TY XZ y TZ XY pueden simplificarse en el límite
0 , (con l , j ) usando (III.B.9). Por el contrario, el término
proporcional a TX XY YZ se anula, porque el integrando se comporta como O conforme
0 :
e
i ( m n p q ) j
4
2
1
1
1
AT , j (l ; ) 2
AT , j (l ; )
2 2
2
4
2
~ O( ) .
(III.B.13)
Finalmente, las Ecs. (III.B.9), (III.B.12) y (III.B.13) conducen inmediatamente a
1
4 2 2
ATm AXn AYp* AZq* TY XZ f mT p f nXq TZ XY f mTq f nX p .
Apéndice III.C. Demostración de (3.3.11):
Se puede comprobar que 1 viene dada por (3.3.11) verificando que el producto por da la
matriz identidad.
1
2
exp[i( p ( N / 2 1 / 2) 1)2j / N ]
exp[ 2i( p 1 N / 2 1 / 2)k / N ]
N
p 1 2
N
1
jk
exp[
2i
( j k )( N 1) / 2)] N
2i
N
exp[
( j k ) p] ,
N
N
p 1
que es uno si j = k (única opción de que j-k sea múltiplo de N). En otro caso, se suma la serie
geométrica:
- 141 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
1
jk
2i
2i
2i
exp
( j k )1 exp
( j k ) N exp
( j k ) 0
N
N
N
0,
2i
2i
1 exp
( j k )
1 exp
( j k )
N
N
jk
Apéndice III.D. Demostración de (3.3.14):
Directamente, de (3.3.13) y del desarrollo en serie de Fourier de X ( R, j , ) se tiene:
2
Xˆ m ( R, )
N
2
N
N
exp(imj ) X ( R, j , )
j 1
N
exp(imj )
j 1
1
2
exp(im' j ) X m' ( R, )
m '
1
N
X
m '
N
m'
( R, ) exp i(m'm) j .
j 1
Recordando de nuevo la expresión de la suma de una progresión geométrica de razón
exp i(m'm) , sabemos que:
N
si (m'm) múltiplo de N
exp i(m'm) (1 exp i(m'm) N )
exp
i
(
m
'
m
)
j
0
en otro caso
j 1
1 exp i(m'm)
N
de modo que queda finalmente:
Xˆ m ( R, )
X
k
m kN
( R, ) .
Apéndice III.E. Demostración de (3.4.7-8):
Particularizando (3.2.8) para la estación central ( R 0 ), resulta:
N
U(0, ) A HV
Rj ( ) A Lj ( ) .
j 1
Aplicando la definición (3.2.11) y las propiedades (3.2.4) y (3.2.5) de A Rj ( ) y A Lj ( ) ,
tenemos:
N
U rad (0, , ) e U(0, ) ARj ( ) cos( j ) ALj ( ) sin( j ) =
j 1
N A iA
ARj iALj i ( j )
Rj
Lj i ( j )
e
e
2
2
j 1
ARj1 iALj1 i ARj1 iALj1 i
e
e ,
2
2
- 142 -
Métodos de autocorrelación espacial.
donde se han introducido las definiciones (3.2.19-20) en el último paso.
La componente tangencial se trata de manera análoga:
N
U tg (0, , ) (e z e ) U(0, ) ARj ( ) sin( j ) ALj ( ) cos( j ) =
j 1
N iA A
iARj ALj i ( j )
Rj
Lj i ( j )
e
e
2
2
j 1
iARj1 ALj1 i iARj1 ALj1 i
e
e .
2
2
Apéndice III.F. Demostración de (3.4.2), (3.4.3), (3.4.11) (3.4.13) y (3.4.14):
Particularizando (3.2.17) para m 1 , se tiene:
1
1
U rad
1 ( R , ) = AR J 0 ( xR ) J 2 ( xR ) iAL J 0 ( xL ) J 2 ( xL ) .
Sustituyendo esto en la definición de SU rad (0, R, ) , queda:
2
1 H , 1 2
ARH , 1 iARH , 1 AL1* iARH , 1 AL1* J 0 ( x R ) J 2 ( x R )
AR
4
SU rad ( R,0, )
2
2
1
+ AL1 AL1 iARH , 1* AL1 iARH , 1* AL1 J 0 ( xL ) J 2 ( xL ) .
4
(III.F.1)
A partir de lo anterior, el denominador en la definición de rad queda:
2
2
2
2
SU rad (0,0, ) 1 [ ARH , 1 ARH , 1 AL1 AL1 iARH , 1 AL1* iARH , 1* AL1 iARH , 1 AL1* iARH , 1* AL1 ] =
4
2
2
2
1 H , 1 2
[ AR
ARH , 1 AL1 AL1 2 Im ARH , 1 AL1* ARH , 1 AL1* ] .
4
Si definimos
2
' ( )
2
2
2
2
AR1 AR1 AL1 AL1 iAR1 AL1* iAR1* AL1 iAR1 AL1* iAR1* AL1
2
2
AR1 AR1 iAR1 AL1* iAR1 AL1*
2
AR1 AR1 i AR1 AL1* AR1 AL1*
2
2
2
2
AR1 AR1 AL1 AL1 2 Im AR1 AL1* AR1 AL1*
- 143 -
,
=
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
rad () J 0 ( xR ) J 2 ( xR )' () J 0 ( xL ) J 2 ( xL )(1 ' ()) ,
resulta:
como
queríamos
demostrar. Usando (3.2.44) en (III.F.1) se puede obtener, para un campo aleatorio estacionario:
SU rad (R,0, ; )
2
1
1 f 0R ( ) J 0 ( xR ) J 2 ( xR ) f 0L ( ) J 0 ( xL ) J 2 ( xL ) ,
2
2
con lo que queda la ecuación anterior se reescribe como:
SU rad ( R,0, ; )
SU rad (0,0, ; )
() J 0 ( xR ) J 2 ( xR ) 1 ()J 0 ( xL ) J 2 ( xL ) ,
donde se ha definido ( ) f 0R
f
R
0
f 0L , que es también el cociente entre los límites para
campo aleatorio del numerador y del denominador de ' ( ) .
El desarrollo para la componente tangencial es paralelo. La particularización de (3.2.18) para
m 1 queda:
U tg1 ( R , ) = iAR1 J 0 ( xR ) J 2 ( xR ) + AL1 J 0 ( xL ) J 2 ( xL ) .
Con estas expresiones, la ecuación (3.4.10) se escribe:
SU tg ( R,0, )
2
1 1 2
AR AR1 iAR1 AL1* iAR1 AL1* J 0 ( xR ) J 2 ( xR )
4
2
2
1
AL1 AL1 iAR1* AL1 iAR1* AL1 J 0 ( xL ) J 2 ( xL )
4
(III.F.2)
A la vista de este resultado, comprobamos que el denominador en la definición de tg tiene la
misma expresión que en el caso radial ( Stg (0, ) S rad (0, ) ), lo que era obvio ya los
integrandos de ambas expresiones son iguales salvo una traslación en , y ambas integrales se
extienden a un periodo completo en tal coordenada. Utilizando la definición de ' ( ) ,
tg = SU ( R,0, ) / SU (0,0, ) queda tal como se avanzaba en (3.4.3). Finalmente, Para campos
tg
tg
aleatorios estacionarios se tiene:
- 144 -
Métodos de autocorrelación espacial.
SU tg ( R,0, ; )
SU tg (0,0, ; )
( ) J 0 ( xR ) J 2 ( xR ) 1 ( )J 0 ( xL ) J 2 ( xL ) .
Apéndice III.G. Demostración de la ecuación (3.5.15)
Como se indicó, cualquier registro puede expresarse como la suma de una componente de señal
y otra de ruido. Esto puede extenderse a los promedios pesados de la componente genérica X
(Utg, Urad ó W):
N
Xˆ m( s n ) ( R, ; ) e imj [ X ( R, j , ; ) X ( n ) ( R, j , ; )]
j 1
Xˆ m ( R, ; ) Xˆ m( n) ( R, ; ) .
(III.G.1)
Bajo la descripción del ruido admitida aquí, y suprimiendo por comodidad los argumentos
( R, ; ) , podemos expresar el producto
1
2
Uˆ 0tg ( s n )Uˆ 0tg ( s n )*
1
2
1
2
Uˆ 0tg ( s n )Uˆ 0tg ( s n )* como:
Uˆ 0tgUˆ 0tg*
1
2
Uˆ 0tg ( n )Uˆ 0tg ( n )*
4 2 ( n )
tg ˆ tg*
ˆ
PH ( )
U0 U0
N
2
1
(III.G.2)
En el primer paso se explota la independencia estadística entre las componentes de señal y de
ruido. En el segundo paso se considera la independencia estadística entre los registros de ruido
de estaciones distintas y la definición de la densidad de potencia espectral del ruido. Este
segundo paso es desarrollado a continuación en un caso algo más general: N>2 y |m|1, |n|1,
que será necesario en otro momento
1
2
Xˆ m( n ) ( R, ; )Yˆn( n )* ( R, ; )
N
2
4 2
1
i ( n m ) j
X ( n ) ( R, j , ; )
XY e
2
N
2
j 1
N
4 2
4 2 ( n )
( n)
i ( n m ) j
P
(
)
e
PX ( ) XY m n
XY X
N2
N
j 1
La igualdad se tiene cuando . Tras este límite (III.G.2) se puede reescribir:
- 145 -
(III.G.3)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
4 2 ( n )
( sn)
ˆ
ˆ
PH ( ) .
GU tg 0U tg 0 ( R, ) GU tg 0U tg 0 ( R, )
N
(III.G.4)
Apéndice III.H. Demostración de las ecuaciones (3.6.1) a (3.6.3).
Las ecuaciones (3.6.1-3) pueden obtenerse eliminando las cantidades dependientes de las
amplitudes de las ondas planas entre las ecuaciones (3.2.16-18) y (3.2.21). Entre el conjunto
infinito de posibilidades, se elige aquella que involucra los menores valores de m (en valor
absoluto). Las formas de la ecuación (3.2.16) para m = 0 y m = 1 son:
W0 ( R , ) = 2ARV ,0 J 0 ( xR ) y
(III.H.1)
W1( R , ) = 2iARV ,1 J 1 ( xR ) ,
(III.H.2)
respectivamente. Del mismo modo, (3.2.17) implica
U 0rad ( R , ) = 2iAR0 J1 ( xR ) y
1
1
U rad
1 ( R , ) = AR J 0 ( xR ) J 2 ( xR ) iAL J 0 ( xL ) J 2 ( xL ) .
(III.H.3)
(III.H.4)
La ecuación (3.2.18) sólo se requiere para m = 1 :
U tg1 ( R , ) = iAR1 J 0 ( xR ) J 2 ( xR ) + AL1 J 0 ( xL ) J 2 ( xL ) .
(III.H.5)
Dividiendo (III.H.3) entre (III.H.1) y usando la ecuación (3.2.21) en la forma
AR0 ( ) / ARV ,0 ( ) i ( ) obtenemos:
U 0rad ( R , ) / W0 ( R , ) = J 1( xR ) / J 0 ( xR ) ,
(III.H.6)
que corresponde a la ecuación (3.6.1) una vez introducida la definición (3.6.4). Para demostrar
(3.6.2) y (3.6.3), las cantidades AL1 han de ser eliminadas a partir de las relaciones (III.H.4) y
(III.H.5). Tras algún álgebra se llega a:
H ,1
tg
U rad
1 ( R , ) f 1 ( xL ) iU 1 ( R , ) = AR
2 J 1 ( xR )
f1( xR ) f1( xL ) 1,
xR
- 146 -
(III.H.7)
Métodos de autocorrelación espacial.
donde se han usado la relación J 0 ( x ) J 2 ( x ) = 2 J 1 ( x ) / x y la definición (3.6.4). Finalmente,
si la ecuación (III.H.7) se divide por (III.H.2), y el cociente AR1 ( ) / ARV , 1 ( ) se remplaza por
i ( ) (de la ecuación 3.2.21) entonces, obtenemos
tg
U rad
( )
1 ( R, ) f1 ( x L ) iU 1 ( R, )
,
f1 ( xR ) f1 ( xL ) 1 W1 ( R, )
xR
(III.H.8)
que corresponde tanto a (3.6.2) (signos superiores) como a (3.6.3) (signos inferiores).
Apéndice III.I. Demostración de la ecuaciones (3.6.15) y (3.6.16)
Las ecuaciones (3.6.15) y (3.6.16) pueden obtenerse de las ecuaciones (3.6.12) y (3.6.13) usando
las relaciones (3.2.16-18) en sus formas particulares (III.H.2), (III.H.4) y (III.H.5).
Abordando primero el cálculo de U tg1W1 U tg1W1 tenemos:
U
W1 U tg1W1 =
tg
1
[ iA J 0 ( x R ) J 2 ( x R ) A J 0 ( x L ) J 2 ( x L ) ] 2
1
R
1
L
[ iAR1 J 0 ( x R ) J 2 ( x R ) AL1 J 0 ( x L ) J 2 ( x L ) ] 2
2 2
AR1
AR1
J1 ( xR ) +
J1 ( xR ) =
[ AL1 AR1 AL1 AR1 ]J 1 ( x R )J 0 ( x L ) J 2 ( x L )
(III.I.1)
rad
De modo similar, U rad
1 W1 U 1 W1 viene dado por:
U
W1 U rad
1 W1 =
rad
1
[ AR1 J 0 ( x R ) J 2 ( x R ) iAL1 J 0 ( x L ) J 2 ( x L ) ] 2
[ A
J 0 ( xR ) J 2 ( xR ) iA J 0 ( xL ) J 2 ( xL ) ] 2
2i 2
[ AL1 AR1 AL1 AR1 ]J1 ( xR )J 0 ( xL ) J 2 ( xL ) .
1
R
1
L
- 147 -
AR1
AR1
J1 ( xR ) -
J1 ( xR ) =
(III-I-2)
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Substituyendo (III-I-1) y (III-I-2) en (3.6.12) se tiene:
nBII
1
2
Im[
i 2
AL1 AR1 AL1 AR1 J12 ( xR )J 0 ( xL ) J 2 ( xL ) J 0 ( xL ) J 2 ( xL ) ]
2
2
2
2
AL1 AR1 AL1 AR1 J12 ( xR )J 02 ( xL ) J 02 ( xL ) ,
2 2
como se quería demostrar. Análogamente, substituyendo (III-I-2) en (3.6.13) resulta:
d BII
2
2
1 1
1 1 2 2
A
A
A
AR J1 ( xR )J 0 ( xL ) J 2 ( xL ) ,
L
R
L
2 2
que es (3.6.16).
Apéndice III.J. Demostración de las relaciones (3.6.17) y (3.6.18)
La demostración de ambas es inmediata si se toma valor esperado en (3.6.15) y (3.6.16) y se usa
X
X*
(3.2.45) y que f m ( ) f m ( ) para cualquier m entero, con X valiendo R (Rayleigh) o L
(Love).
AL1 AR1 AL1* AR1*
AL1 AR1 AL1* AR1*
2 1 1
4 4 AL1 AR1 AL1* AR1*
1 1 2
AL AR AL AR
2
2 2
4 2 2
4 2 2
4 2 2
AL1 AR1 AL1* AR1* 4 4 L R
8 4 L R
L R
L R
L R
f
f
f
f
f
f
f
f
f 0 f 0 2 Re[ f 2L f 2R* ]
0 0
0 0
2 2
2 2
2 2
2
2
4
Apéndice III.K. Demostración de las ecuaciones (3.6.23) y (3.6.24)
Para demostrar las ecuaciones (3.6.23) y (3.6.24), se advierte primero que, de sus definiciones:
nˆ B( sIIn ) Im[
1
4
2
2
Uˆ
( sn) ˆ ( sn )
( sn ) ˆ ( sn )
Wˆ (1s n ) Uˆ tg1( s n )Wˆ (1s n ) Uˆ rad
W1 Uˆ rad
W1
1
1
tg ( s n )
1
*
]
(III.K.1)
dˆ B( sIIn )
1
4
2
2
( sn) ˆ ( sn)
( sn ) ˆ ( sn )
Uˆ rad
W1 Uˆ rad
W1
1
1
2
.
(III.K.2)
Para evaluar los miembros derechos de (III.K.1) y (III.K.2) basta calcular los valores esperados
( s n )* ˆ ( s n )*
de los productos Uˆ mrad( sn)Wˆn( sn)Uˆ mrad( sn)*Wˆ n( sn)* (4 2 2 ) , Uˆ mrad( sn)Wˆn( sn)Uˆ rad
Wn
/( 4 2 2 ) ,
m
- 148 -
Métodos de autocorrelación espacial.
( s n )* ˆ ( s n )*
Uˆ mtg ( s n)Wˆn( s n)Uˆ mrad( s n)*Wˆn( s n)* /( 4 2 2 ) y Uˆ mtg ( s n)Wˆn( s n)Uˆ rad
Wn
/( 4 2 2 ) , para n, m = ±1.
m
La evaluación del primero queda:
1
4
2
2
Uˆ mrad( s n )Wˆ n( s n )Uˆ mrad( s n )*Wˆ n( s n )*
Uˆ mradWˆ n Uˆ mrad*Wˆ n*
Uˆ mrad( n )Uˆ mrad ( n )*
4 2 2
2
Uˆ mrad( n )Uˆ mrad( n )*
2
Wˆ n( n )Wˆ n( n )*
Wˆ n( n )Wˆ n( n )*
2
2
Uˆ mradUˆ mrad*
2
Wˆ n Wˆ n*
Uˆ mradWˆ n Uˆ mrad*Wˆ n*
16 4 ( n ) ( n ) 4 2 ( n ) Uˆ mradUˆ mrad*
PH PV
PV
2
4 2 2
N2
N
2
4 2 ( n ) Wˆ n Wˆ n*
.
PH
N
2
(III.K.3)
En el primer paso se ha usado que los procesos aleatorios que describen al ruido no
correlacionado tienen media cero, así como la independencia estadística entre la señal y el ruido
y entre registros de ruido en componentes distintas. En el segundo paso, se considera la
independencia estadística entre las componentes de ruido grabadas en diferentes estaciones así
como la definición de la densidad espectral de potencia del ruido (ver Ec. III.G.3). Se ha
considerado también que N>2 y que los posibles valores para m y n son 1. La igualdad se tiene
para .
Un análisis similar puede llevarse a cabo para los otros tres productos listados antes. Los
resultados respectivos son:
1
4
2 2
1
4 2
( s n )* ˆ ( s n )*
Uˆ mrad( s n )Wˆn( s n )Uˆ rad
Wn
m
Uˆ mtg ( s n )Wˆn( s n )Uˆ mrad( s n )*Wˆn( s n )*
2
1
4
2 2
* ˆ*
,
Uˆ mradWˆn Uˆ rad
m W n
(III.K.4)
4
1 ˆ tg ˆ rad*
Uˆ mtgWˆn Uˆ mrad*Wˆn*
PV( n )
Um Um
2 2
4
N
2
2
1
(III.K.5)
y
1
4
2 2
( s n )* ˆ ( s n )*
Uˆ mtg ( s n )Wˆn( s n )Uˆ rad
Wn
m
1
4
2 2
* ˆ*
Uˆ mtgWˆn Uˆ rad
m W n ,
(III.K.6)
siempre con N>2 y |m|=|n|=1. Finalmente, las ecuaciones (3.6.23) y (3.6.24) se obtienen
- 149 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
remplazando los productos analizados de (III.K.1) y (III.K.2) por las expresiones (III.K.3),
(III.K.4), (III.K.5) y (III.K.6).
- 150 -
CAPÍTULO 4
UN ALGORITMO PARA LA INVERSIÓN DEL
MODELO DE ESTRUCTURA
4.1. INTRODUCIÓN
En este capítulo se trata el problema de la recuperación del modelo de la estructura del terreno
(descrito en términos de sus parámetros elastodinámicos) a partir de las medidas experimentales,
que, para muestro problema concreto, consistirán en velocidades de onda Rayleigh, Love y/o
valores del HVSR a distintas frecuencias. Tras una formulación general del problema en el
contexto bayesiano, se describirán algunos métodos de optimización global y de optimización
local. Los primeros tratan de obtener el mejor modelo (o los mejores modelos) de entre una gran
variedad de ellos usando poco conocimiento previo (normalmente sólo su parametrización y
unos rangos amplios para sus distintas propiedades). Los segundos tratan de refinar
iterativamente una estimación inicial, buscando un modelo óptimo dentro de un entorno de éste.
Finalmente, se describe un programa, preparado para su ejecución por varios procesadores en
paralelo, que combina métodos de ambos tipos y se hacen comprobaciones en un ejemplo
sintético.
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Para describir el problema de modo más formal y general, llamemos modelo m = (m1,
m2,…m dim(M ) )t al listado, en forma de columna, de un conjunto mínimo de propiedades que
(suponemos) caracterizan el sistema que se pretende estudiar (p. e., y en nuestro caso, espesores
de distintas capas, densidades y velocidades de propagación de ondas P y S) y d = (d1, d2,…,
d
dim(D )
)t a la lista de las variables medidas experimentalmente (p. e., velocidad de fase de onda
Rayleigh a la frecuencia f1, velocidad de onda Love a f2, …). m y d pertenecen, respectivamente,
a dos conjuntos denominados espacio de los modelos M y espacio de los datos D que contienen
todas las combinaciones de parámetros y datos concebibles para el sistema y el experimento.
Asumimos ahora que conocemos una ley física capaz de predecir los valores reales de los
parámetros observables para cualquier modelo dado. Esa relación la expresamos mediante una
función g: M D. A la cantidad g(m) se la denomina cálculo (o modelado) directo de los
observables a partir del modelo m, mientras que el empleo de los resultados de un experimento
para obtener los parámetros del modelo (i. e. m) se denomina inversión o modelado inverso.
Si g(m) es inyectiva (i. e. dos modelos distintos no comparten nunca un mismo vector de
observables), las incertidumbres experimentales en d son despreciables y g-1 puede determinarse
con un esfuerzo razonablemente, el problema inverso puede reducirse a un sencillo cálculo de
g-1(d) . Si, como en el caso que nos ocupa, estas condiciones no se dan, serán necesarios otros
procedimientos de tipo estadístico para solucionar el problema. La teoría general se presenta
brevemente la siguiente sección.
4.1.1. LA SOLUCIÓN DEL PROBLEMA INVERSO. ASPECTOS PROBABILISTAS.
La solución de un problema de inversión puede definirse de un modo muy general en función de
la información experimental, la información a priori y la información teórica. Una buena
aproximación sobre los aspectos probabilistas de la inversión puede encontrarse en la obra de
Tarantola (2005), autor recientemente fallecido. A continuación se realiza un breve resumen.
Aspectos probabilistas. Densidad de probabilidad a posteriori. Función costo.
La información a posteriori en el espacio de los modelos, es decir, el conocimiento que se tiene
del modelo de suelo tras el proceso de medida e inversión, se puede cuantificar mediante una
densidad de probabilidad M (m) , que se expresa, en virtud del teorema de Bayes como la
integral:
- 152 -
Un algoritmo para la inversión del modelo de estructura.
M (m) = cte M (m) d d
D
D (d ) (d | m)
D (d )
(4.1.1)
(ver p. e. Tarantola, 2005, Ec. 1.89). Esta ecuación proviene de una formulación muy general del
problema inverso. En ella:
i) d d · indica integración en el espacio de los datos.
D
ii) La densidad de probabilidad D (d ) da cuenta de los resultados de las medidas (datos
experimentales) y de la incertidumbre la medición (p. e. debida a efectos del instrumento),
indicando cómo de probable es que el valor verdadero de la magnitud medida sea d.
iii) La información a priori (probabilidad de que m sea el modelo verdadero, conocida por otros
medios) viene descrita por la distribución M (m) . En ausencia de información previa, M (m)
se remplaza por M (m) , denominada densidad de probabilidad homogénea en el espacio de los
modelos. Si todos los modelos se consideran equiprobables a priori en la parametrización de M
utilizada, M (m) será constante (si se cambiara seguidamente de parametrización, sería
necesario sustituir la distribución M , por otra distribución proporcional al elemento de volumen
en el nuevo espacio de los modelos, que podría ahora depender de m ).
iv) La distribución de probabilidad condicional (d | m) representa el cálculo directo de la
magnitud medida a partir de cualquier modelo m . Se contempla en (4.1.1) el caso general en el
que el cálculo directo no da un resultado d unívoco para cada m , sino que existe alguna
incertidumbre asociada que se puede expresar como una densidad de probabilidad (d | m)
para todo valor de d. Cuando el cálculo directo sí se puede realizar sin indeterminación y viene
dado por una función g(d), se puede escribir (d | m) = (d g(m)) .
v) Por último, D (d ) es la densidad de probabilidad homogénea en el espacio de los datos y
“cte” es una constante de normalización que posibilita que la integral de M (m) sobre M valga
uno.
- 153 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
En el caso que nos ocupa, puede ser razonable admitir que M (m) = M (m) =cte (no hay
información previa y todos los modelos tienen la misma probabilidad a priori), que D (d ) =cte
y que (d | m) = (d g(m)) . También admitiremos generalmente que las incertidumbres
experimentales en los datos son independientes y de tipo gaussiano:
1 dim(D ) (d
D (d )
exp
dim(D )
j 1
2
dim(D ) / 2
j
2
1
j
d
)
,
obs j 2
j2
(4.1.2)
j 1
donde d obs j , j y d j representan el j-ésimo dato experimental, su desviación típica y un
valor arbitrario para dato j-ésimo. Bajo estas hipótesis, la ecuación (4.1.1) queda:
1 dim(D ) ( g j (m) d
M (m) exp
j2
2 j 1
)
obs j 2
(4.1.3)
donde g j (m) es la componente j-ésima de g(m), i. e., el cálculo directo del observable j.
La suma
dim(D )
j
( g (m) d
j 1
obs j
)2
j2
, que representa una medida de la discrepancia entre los
datos experimentales (pesados inversamente a su varianza) y el cálculo directo g(m) será, salvo
que se indique lo contrario, nuestra definición de función costo, y se simbolizará misfit(m).
M (m) es monótonamente decreciente respecto al costo del modelo m. Al negativo de la raíz
de la función costo se la denomina a veces función objetivo. Cabe advertir que no existe un
consenso general sobre estas definiciones.
Función costo ecualizada.
En la mayoría de las aplicaciones sismológicas en las que se realiza inversión a partir de datos de
distinto tipo (p. e., velocidades de ondas Rayleigh, de ondas Love, de modos superiores,…)
usados simultáneamente, se suele reformular ligeramente la definición de función costo, y
consecuentemente las (4.1.2-3), de modo que se incluya una “ecualización” que dé el mismo
“peso” a las magnitudes que se están invirtiendo.
Supongamos, por simplicidad, que tenemos dos tipos de datos (tipo 1 y tipo 2) y que el espacio
D se puede descomponer como el producto cartesiano D(1) D(2). En este caso, y siendo
dim(D(1)) y dim(D(2)) el número de datos de cada tipo, podemos definir D (d ) como:
- 154 -
Un algoritmo para la inversión del modelo de estructura.
D (d )
1 dim(D ) dim(D (1) ) (d j d obs j ) 2
dim(D )
(d
dim(D )
exp
(1)
j2
2 dim(D ( 2) ) j dim(D (1))1
2 2 dim(D ) j 1
dim(D (1) )
2 dim(D (1) ) j 2 dim(D ) 2 dim(D ( 2) )
dim(D ) / 2
2
dim(D )
j 1
j dim(D (1) )1 dim(D )
j
d
)
,
obs j 2
j2
j2
(4.1.4)
quedando
M (m)
j
(1 )
1 dim(D) dim(D ) ( g (m) d
exp
(1)
j 1
2
2
dim(
D
)
j2
obs j 2
)
dim(D)
2 dim(D ( 2) )
( g j (m) d
dim(D )
(1)
j dim(D
j2
) 1
)
.
obs j 2
(4.1.5)
Si se midió el mismo número de datos para ambos observables, i. e. dim(D (1) ) = dim(D ( 2) ) =
dim(D) / 2 , se recupera (4.1.3). Recogiendo la terminología de Pei (2007), el corchete del
numerador de (4.1.5) podría denominarse función costo ecualizada.
También es práctica común en los problemas sismológicos (p. e. Arai and Tokimatsu, 2005)
controlar la importancia relativa de las distintas magnitudes medidas mediante pesos
determinados empíricamente (normalmente mediante “prueba y error”). En nuestro caso simple,
si estos pesos son p (1) y p ( 2) , cumpliendo p (1) + p ( 2) = 1, M (m) vendrá dada por:
M (m)
j
(1)
(1 )
1 p dim(D ) dim(D ) ( g (m) d
exp
(1)
j 1
j2
2 dim(D )
obs j 2
)
p ( 2) dim(D )
dim(D ( 2) )
( g j (m) d
dim(D )
(1)
j dim(D
) 1
j2
)
.
obs j 2
(4.1.6)
Si p (1) = p ( 2) = ½ se recupera (4.1.5). Formalmente, las ecuaciones (4.1.5) y (4.1.6) son
idénticas a (4.1.3) salvo en que ahora 2 dim(D (l ) ) j 2 / dim(D) ó dim(D (l ) ) j 2 /[ p (l ) dim(D)]
juegan el papel de la varianza del dato j-ésimo. La adaptación de las ecuaciones descritas en
- 155 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
secciones posteriores a los casos en que M (m) venga dada por (4.1.5) o (4.1.6) es inmediata y
no se dará explícitamente.
“Visualización” de la solución del problema inverso.
Dados los datos experimentales y la función que realiza el cálculo directo, g(m) , la distribución
(4.1.3) se puede considerar ya como la solución al problema inverso. Desde esta perspectiva, la
dificultad estaría ahora en “visualizar” M (m) para poder identificar las zonas (modelos) con
mayor densidad de probabilidad. La representación detallada de M (m) suele ser inviable dada
la gran cantidad de modelos a evaluar (se requeriría un mallado fino en el espacio de los
modelos) y la dificultad de representación en más de 2 ó 3 dimensiones. Una opción interesante
consiste en generar y observar una gran colección de muestras de la distribución M (m) , es
decir escoger aleatoriamente modelos de tal modo que la densidad de probabilidad de que m sea
escogido sea proporcional a M (m) . El algoritmo de Metropolis-Hastings (Metropolis et al.
1953, Hastings 1970) puede usarse para llevar a cabo esta tarea de muestreo (ver p. e. Binder and
Heermann, 2002, Sambridge and Mosegaard, 2002; Gallagher et al., 2009).
4.1.2. CÁLCULO DEL MODELO MEDIO Y DE LAS INCERTIDUMBRES.
Una vez que podemos evaluar M (m) , se puede extraer toda la información estadística deseada.
Por ejemplo, se puede calcular el modelo medio mediante:
m d m m M (m)
(4.1.7)
M
y la matriz de covarianzas como
~
t
C M d mm m m m M (m) ,
(4.1.8)
M
cuyos elementos en la diagonal principal son las varianzas de los correspondientes parámetros.
Para obtener la distribución estadística de un parámetro j en particular, se calcula su densidad de
probabilidad marginal a posteriori:
M j (m j ) d m1 ...d m j 1d m j 1 ...d m dim(M ) M (m) .
M
- 156 -
(4.1.9)
Un algoritmo para la inversión del modelo de estructura.
La utilidad de estas expresiones es discutible en el caso en el que haya varias regiones del
espacio de los modelos con buen grado de ajuste, ya que se podría obtener un modelo medio m
que no reproduzca bien los datos (i.e. con M (m ) pequeño) y grandes desviaciones típicas.
En cualquier caso, las integraciones anteriores se pueden realizar mediante el método de Monte
Carlo (en esencia, promediar evaluaciones del integrando en un conjunto de modelos aleatorios).
De este modo, si se eligen modelos aleatorios según una densidad de probabilidad uniforme, las
integrales (4.1.7) y (4.1.8) se pueden aproximar como un promedio pesado (de m y de
m m m m t ) sobre los modelos probados, con un peso para el modelo mp dado, siguiendo
(4.1.3), por:
1 dim(D ) ( g j (m p ) d
exp
j2
2 j 1
Nm
1 dim(D ) ( g j (m l ) d
exp
j2
l 1
2 j 1
)
,
j obs 2
)
j obs 2
(4.1.10)
donde Nm es el total de modelos evaluados. Desgraciadamente, si el número de parámetros que
definen el modelo es grande (típicamente, mayor que 10), es probable que las regiones en las que
el peso es significativo no se muestreen suficientemente si este muestreo hace de modo
uniforme. Dal Moro et al. (2007) usan esta aproximación para invertir un modelo medio a partir
de curvas de dispersión y evaluar sus incertidumbres, tomando todas las poblaciones generadas
en aplicaciones reiteradas de un algoritmo genético, que resultan más ricas en modelos con buen
ajuste. De modo más riguroso, se podría mejorar el resultado generando modelos que sigan una
cierta distribución de probabilidad conocida p(m) que muestree mejor las regiones de M que
proporcionan buenos ajustes (i. e. aquellas con M (m) apreciable). En ese caso habría que
corregir los pesos de cada modelo en la media final (modificar la expresión 4.1.10), de modo que
éstos queden proporcionales a M (m) /p(m) en lugar de a M (m) . Un caso extremo consiste en
muestrear según la distribución p(m) = M (m) (por ejemplo, usando el algoritmo Metropolis~
Hastings, como se comentó antes). En ese caso, m y C M se obtienen como simples promedios
(sin pesos) de m y m m m m para los modelos así generados (ver p. e. Gallagher et al.,
t
2009, Ec. 7).
- 157 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
4.2. MÉTODOS DE BÚSQUEDA GLOBAL.
En la sección anterior se mencionaron el método de Monte Carlo y una variante: el algoritmo de
Metropolis-Hastings en dos contextos diferentes pero muy relacionados: la exploración del
espacio de los modelos en busca de máximos relativos de M (m) (i. e. de modelos probables,
dadas las medidas experimentales) y la evaluación de las integrales que definen el modelo medio
y la desviación típica en sus parámetros. En esta sección nos centramos en el primer aspecto,
comentando brevemente estos y otros métodos que tienen en común la capacidad de explorar
grandes regiones del espacio de los modelos en busca de mínimos de la función costo
(equivalentemente, máximos de la densidad de probabilidad a posteriori o de la función
objetivo), tratando de evitar el quedar atrapados en posibles mínimos locales. Un primer método
de búsqueda global consiste en la evaluación de misfit (m) en un mallado suficientemente fino
de M. Esta opción es viable cuando el número de parámetros es pequeño, típicamente, de hasta
tres o cuatro (p. e. para un cálculo directo que dure 1s y 20 valores por cada variable, el cálculo
dura dos días en dimensión cuatro; si hay 50 valores por variable, ya dura 72 días; en dimensión
tres las duraciones serían de dos horas y 34 horas respectivamente).
4.2.1. MÉTODOS DE MONTE CARLO
En su forma más simple, el método de Monte Carlo consiste en generar una colección de
modelos distribuidos aleatoriamente y uniformemente en una región acotada del espacio de los
modelos, en la que supone que puede haber elementos con buen ajuste. Se trata de una opción
muy atractiva por su simplicidad y porque no se necesita ningún ajuste experto de parámetros
relacionados con la operación del método, aparte de los intervalos de búsqueda. Su principal
problema consiste en que, conforme la dimensionalidad del problema crece, el número de
modelos muestreados debe de crecer sustancialmente (exponencialmente) para tener
oportunidades de encontrar las regiones de alto grado de ajuste. Tarantola (2005) indica, bastante
poéticamente, que “los espacios de alto número de dimensiones tienden a estar terriblemente
vacíos”. Aún así, estos métodos son aplicables en casos de dimensionalidad moderada.
Recientemente Socco and Boiero (2008) han realizado experimentos sintéticos invirtiendo las
velocidades de ondas S y los espesores en modelos de hasta tres capas sobre el semiespacio
(espacio de los modelos de dimensión 7) examinando 150000 modelos.
- 158 -
Un algoritmo para la inversión del modelo de estructura.
4.2.2. ALGORITMOS GENÉTICOS
Los algoritmos genéticos (GA) (Holland 1975, Goldberg 1989, Whitley 1994) son considerados
como una herramienta muy potente para la exploración del espacio de los modelos. Su
funcionamiento pretende mimetizar el proceso de evolución biológica natural.
A los parámetros del modelo se les permite tomar sólo un conjunto discreto de valores, de modo
que cada modelo puede ser codificado en una cadena de bits. El funcionamiento típico consiste
en generar aleatoriamente una población que consta de un número fijo de modelos sobre la cual
se van a aplicar, en cada iteración, tres operadores: selección, cruce y mutación. El operador
selección elige aleatoriamente un conjunto de modelos que pasarán a la siguiente población, con
más probabilidad cuanto mayor sea su grado de ajuste. El operador cruce combina segmentos de
las cadenas de bits de parejas de modelos “padres”, también mediante decisiones aleatorias. El
operador mutación puede cambiar aleatoriamente el valor de cada bit (con una probabilidad baja)
para hacer una población más diversa. Tras varias iteraciones (generaciones) se van
seleccionando modelos con buen ajuste y a la vez, explorando distintas regiones de M.
Típicamente, el algoritmo requiere la elección de cinco parámetros, como el tamaño de la
población y los relacionados con las decisiones aleatorias que ejecutan los operadores.
Los GA se han aplicado en muchas ocasiones en problemas de geofísica, y en particular para el
ajuste de formas de onda. Algunas aplicaciones a la inversión de datos de ondas superficiales
pueden encontrarse en los trabajos de Yamanaka and Ishida (1996) y Fäh et al. (2003). En
García-Jerez et al. (2008a) se adaptó el algoritmo genético escrito por Jiménez et al. (2005) en
entorno MATLAB® para la inversión de curvas de dispersión y HVSR. Sin embargo, si se
pretende una descripción bayesiana de la información que se consigue en la inversión (en la línea
de la Sección 4.1.1), los algoritmos genéticos resultan inapropiados, ya que la distribución de
probabilidad con que se muestrea M es muy compleja o desconocida (ver p. e. Sambridge and
Mosegaard 2002, Tarantola 2005).
4.2.3. CRISTALIZACIÓN SIMULADA.
La cristalización simulada (simulated annealing) es un método de inversión inspirado en el
proceso termodinámico de enfriamiento y cristalización de la materia, destinado a encontrar el
modelo con máxima verosimilitud (el que maximiza M (m) / M (m) ). Desde el punto de vista
de la teoría estadística resumida en la Sección 4.1.1, el método consiste en muestrear una versión
deformada de la densidad de probabilidad a posteriori M (m) de modo que, a medida que se
obtienen muestras, se van acentuando los picos de probabilidad entorno al modelo (o modelos)
- 159 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
que proporcionan buen ajuste. La densidad de probabilidad modificada M (m, T ) se define, en
general, como:
T0 M (m)
ln
M (m)
T
M (m, T ) M (m) exp
(4.2.1)
que, para las M (m) descritas en la Sección 4.1.1 y con M (m) constante queda:
1 T0
misfit (m) .
2T
M (m, T ) exp
(4.2.2)
En estas densidades modificadas intervienen dos nuevos parámetros, T y T0 , a los que se
denomina temperaturas (instantánea e inicial, respectivamente) ya que (4.2.2) tiene una forma
similar a la probabilidad de ocurrencia del estado m a la energía misfit (m) / 2 según la
distribución de Gibbs. El muestreo de la distribución (4.2.2) se puede realizar extrayendo
modelos sucesivos mediante el algoritmo de Metropolis-Hastings (Metropolis et al. 1953,
Hastings 1970). Tras muestrar suficientemente M (m, T ) a una temperatura dada, se procede a
bajar ésta (por ejemplo Pei, 2007 sigue una relación Ti1 cte Ti ) y continuar la serie de
muestreos. Esta reducción de T supone realzar la probabilidad de obtener modelos con buen
ajuste en detrimento de los de peor ajuste. El procedimiento termina cuando se cumple algún
criterio prefijado, p. e., cuando no se consigue bajar el valor de misfit (m) en un cierto número
de iteraciones o cuando misfit (m) está por debajo de cierto valor. La acción combinada del
muestreo de Metropolis y del enfriamiento produce una serie de modelos que tiende a converger
a un máximo de M (m) . Si el enfriamiento es lento, el método explora mejor el espacio de los
modelos, favoreciéndose la transición de unas regiones de M a otras (incluso transitando por
zonas de peor ajuste). Si es rápido, el comportamiento es más parecido a una optimización local
y puede obtenerse un mínimo relativo de misfit (m) . Un ejemplo de aplicación del algoritmo a la
inversión de curvas de dispersión puede encontrarse en el artículo de Martínez et al. (2000).
4.2.4. OTROS MÉTODOS.
En la bibliografía se pueden encontrar aplicaciones de muchos otros procedimientos de inversión
que tienen capacidad para la optimización global, tales como el empleo de redes neuronales o del
- 160 -
Un algoritmo para la inversión del modelo de estructura.
algoritmo Neighbourhood (de la vecindad). Estos métodos son comentados brevemente a
continuación.
Las redes neuronales son algoritmos que pretenden abordar el problema de la inversión
emulando el funcionamiento del cerebro. Fueron aplicadas por primera vez al problema que nos
ocupa por Gucunski (1993). Posteriormente, Michaels and Smith (1997) las aplicaron a la
inversión de la estructura partiendo de sismogramas en lugar de usar curvas de dispersión. El
algoritmo permite obtener los parámetros del modelo a partir de los observables basándose en un
aprendizaje previo en el que la red neuronal (un programa informático) es entrenada con una
serie de señales sintéticas para las que se conoce el modelo correspondiente. El método tiene
limitaciones para el estudio de la propagación de errores y en los casos en que la solución no es
única.
El algoritmo neighbourhood o de la vecindad (p. e. Sambridge, 1999; Wathelet, 2005) está
basado en la posibilidad de obtener una partición del espacio de los modelos mediante diagramas
de Voronoi (la definición de estas regiones será revisada brevemente en la Sección 4.4 y Fig.
4.4.2). Partiendo de un conjunto de modelos aleatoriamente (y uniformemente) distribuidos en
M, se determinan en primer lugar sus respectivas celdas de Voronoi. Seguidamente, las celdas
centradas en los mejores modelos son muestradas, generando nuevos modelos uniformemente
distribuidos en su interior. El conjunto ampliado de modelos induce una nueva partición de M
en la que las regiones con alto grado de ajuste están más finamente divididas. El procedimiento
es iterado (muestreando el nuevo conjunto de celdas óptimas), acotando así los mejores modelos
en celdas de menor volumen cada vez. El número de celdas óptimas a tratar y el número de
modelos aleatorios que se generan en cada iteración son fijos y predeterminados por el usuario.
4.3. MÉTODOS DE BÚSQUEDA LOCAL.
Existen problemas físicos en los que la función misfit (m) (o M (m) ) es sencilla y presenta un
solo mínimo relativo o, más comúnmente en los problemas que nos ocupan, el conocimiento
sobre la solución es suficiente como para acotar el espacio de los modelos a una región con tales
características. En esos casos, puede ser preferible utilizar un algoritmo de búsqueda local capaz
de explorar esa región de M localizando el mínimo de forma precisa. Estos algoritmos requieren
un modelo inicial a partir del cual evolucionar en un único camino hacia un mínimo local. Suelen
- 161 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
ser adecuados aún en espacios de dimensionalidad alta. A continuación se comentan dos de estos
algoritmos que van a ser utilizados en la parte experimental de esta tesis.
4.3.1. INVERSIÓN LINEALIZADA.
Estos métodos sacan partido de un caso de problema inverso especialmente simple. Se trata de
aquel en que el cálculo directo viene descrito por una operación lineal. La relación d=g(m)
puede escribirse entonces como una operación matricial d = G m y la densidad de probabilidad
a posteriori M (m) (Ec. 4.1.3) conserva una forma Gaussiana:
1
2
~ d
M (m) exp (Gm
~ (G t C 1G) 1 G t C 1d
centrada en m
D
D
obs
obs
~
~ d
) t C M1 (Gm
obs
)
(4.3.1)
~
y con C M (G t C D1G) 1 , siendo C D una matriz
diagonal con las varianzas de los datos. Si dim(M)=dim(D), se tiene simplemente
~ G 1d
m
obs
.
Cuando el problema no es lineal, g(m) puede desarrollarse en torno a un modelo m0 cercano a la
j
jl g
~
solución m como g(m) g(m0) + G(m - m0), con G = l
m
, de modo que ésta puede ser
m0
aproximada por
~ m - (G t C 1G) 1 G t C 1 (g(m ) - dobs).
m
0
0
D
D
(4.3.2)
Este procedimiento se puede aplicar de modo interativo reintroduciendo el modelo calculado
~ como modelo inicial y calculando la matriz G en torno a él. Si el problema es fuertemente no
m
lineal, el algoritmo se puede estabilizar introduciendo un amortiguamiento. En el método quasiNewton, esto se traduce en aplicar un factor entre 0 y 1 tras el primer signo (-) de (4.3.2) cuyo
efecto es acortar los pasos entre dos modelos sucesivos impidiendo que el algoritmo se “salte”
~ . Si el problema es débilemente no lineal,
posibles variaciones “rápidas” de g(m) entre m y m
0
M (m) no es una Gaussiana, pero puede ser aún aproximada por una Gaussiana como (4.3.1) en
~ obtenido.
torno al punto óptimo m
~
La matriz de covarianzas a posteriori se evalúa como C M (G t C D1G) 1 tomando las derivadas
~
~ . Los elementos de la diagonal principal de C
parciales en el punto m
M representan las
- 162 -
Un algoritmo para la inversión del modelo de estructura.
varianzas de los correspondientes parámetros y por tanto, sus raíces cuadradas pueden tomarse
como estimación del error en el parámetro del modelo invertido (ver también la definición de la
elipse o el elipsoide de error en el Apéndice IV.B). Los elementos de fuera de la diagonal indican
en qué medida las incertidumbres de las distintas variables están correlacionadas. Efectivamente,
la correlación entre las incertidumbres de los parámetro j y l es más importante cuanto mayor sea
~
~ ~
el valor de C Mjl / C Mjj C Mll < 1. El grado de representatividad del ajuste puede evaluarse a partir
~ ) (Apéndice IV.A).
del valor de misfit (m
Una formulación más general de este problema, en la que se integra la información a priori
puede encontrarse en la obra de Tarantola (2005).
4.3.2. DOWNHILL SIMPLEX.
Este procedimiento, diseñado por Nelder and Mead (1965), evita la estimación de derivadas
parciales de la función costo respecto a los parámetros ajustables del modelo (o de gj(m) como
en el caso anterior), permitiendo una rápida adaptación del algoritmo a cualquier tipo de cálculo
directo. Por otra parte, la convergencia a la solución local es típicamente más lenta que en el caso
anterior. En primer lugar, se define un modelo inicial y se genera un conjunto de dim(M)+1
modelos (que son los vértices de un cuerpo geométrico denominado simplex) variando
ligeramente y una a una sus dim(M) variables independientes. Por ligeramente ha de entenderse
una variación pequeña, pero con efectos perceptibles en el cálculo directo de la curva a ajustar
(dependerá del problema concreto). La función costo es evaluada en cada uno de los vértices del
simplex y el que proporciona el peor ajuste es reemplazado por otro, obtenido mediante la
realización de ciertas operaciones geométricas sobre el conjunto (contracción, reflexión o
reflexión y expansión, ver Figura 4.3.1). Si estas operaciones fallan (no consiguen un vértice
mejor que el eliminado), el simplex se contrae hacia el mejor de sus vértices antes de
reintentarlas (contracción múltiple en Fig. 4.3.1). El proceso se puede terminar cuando la
diferencia en la función costo entre el peor y el mejor vértice del simplex está por debajo de
cierto porcentaje prescrito o cuando el tamaño del simplex se hace suficientemente pequeño.
4.4. DISEÑO E IMPLEMENTACIÓN DE DOS ALGORITMOS HÍBRIDOS.
A continuación se describe y se muestran las posibilidades de un código que combina métodos
locales de optimización con una búsqueda aleatoria simple aplicado al problema de la obtención
de modelos de suelo unidimensionales a partir de curvas de dispersión de ondas superficiales de
- 163 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 4.3.1 Posibles evoluciones del “simplex” en un espacio de los modelos tridimensional. Los vértices
“superior” e “inferior” del simplex son los que presentarían mayor y menor valor de misfit, respectivamente.
Adaptado de Press et al. (1992).
corto periodo. Con el objetivo de aprovechar al máximo las capacidades de cómputo actuales, se
ha elaborado un programa informático paralelizado cuyo funcionamiento sigue el esquema
indicado en la Figura 4.4.1. El programa está escrito en FORTRAN77 y utiliza subrutinas MPI
(Message Passing Interface) para la comunicación entre los distintos procesadores.
Algoritmos de optimización implementados
En la versión actual, el programa puede trabajar en dos modos distintos: i) Búsqueda aleatoria
directa (Monte Carlo) + Inversión linealizada o ii) Monte Carlo + Downhill Simplex. Como caso
particular de interés, también es posible realizar búsquedas Monte Carlo exclusivamente. El
procedimiento es, básicamente, como sigue:
Uno de los ordenadores, al que llamaremos máster, realiza una elección de modelos mediante un
generador de números pseudo-aleatorios y dentro de ciertos rangos decididos a priori por el
usuario. Los modelos están definidos por la velocidad de onda P (VP), la velocidad de onda S
(VS), el espesor (h) y la densidad () de cada uno de los estratos planoparalelos que, se supone,
forman la estructura (el número de estratos es fijo y es definido por el usuario). Dos formatos
distintos son soportados para establecer la región del espacio de los modelos a explorar: la
especificación de intervalos para cada parámetro del modelo y la especificación de regiones en el
- 164 -
Un algoritmo para la inversión del modelo de estructura.
plano VS – z (con z representando la profundidad) limitadas por relaciones potenciales del tipo
VS = V0 z x con V0 y x constantes. En el primer caso, pueden indicarse tres tipos de parámetros:
variables independientes, fijos y dependientes. Los dependientes se calculan del resto a partir de
relaciones empíricas (p. e. o VP a partir de VS). El usuario puede elegir entre usar las relaciones
pre-programadas o aportar otras en forma de parejas de valores en un archivo adjunto (que se
usarán para interpolación). En el segundo caso, VP y se tratan siempre como parámetros
dependientes.
El ordenador máster envía estos modelos iniciales al resto de procesadores y espera sus
respuestas mediante recepciones no bloqueantes de MPI. Seguidamente, cada procesador
secundario emplea métodos de optimización local con objeto de encontrar un mínimo relativo de
la función misfit(m) en el entorno del modelo recibido.
En el modo i) se emplea el método de Backus-Gilbert (Backus and Gilbert, 1970) en su
implementación de Herrmann (1987). En este caso, se permite realizar iteraciones en las que las
variables independientes sean todas las velocidades de onda S (VS) o bien los espesores de las
capas (h). Cualquier secuencia regular de ambos tipos de iteraciones puede ser también prefijada.
El número de iteraciones es fijado por el usuario.
En el modo ii) se emplea método Simplex-Downhill (Nelder y Mead, 1965). Concretamente, se
usa adaptación de la subrutina amoeba (Press et al. 1992). El simplex inicial se construye
variando un pequeño porcentaje (5%) los parámetros del modelo inicial (se usa el mismo
criterio que en la función fminsearch de MATLAB). El procedimiento termina cuando se
estabiliza el grado de ajuste de los datos o cuando se alcanza un número de iteraciones prefijado.
En este modo de operación, se preserva la clasificación de los parámetros del modelo (variables,
dependientes o constantes) también durante las iteraciones. Cualquier subconjunto de
propiedades se puede marcar como independientes (por ejemplo, espesores y velocidades de
onda S o P de ciertas capas, etc.). Además, si la región de generación de modelos iniciales se
especificó mediante los intervalos de variación de los parámetros independientes, se puede
(opcionalmente) forzar que la minimización local se realice también dentro de esa región,
sumando penalizaciones artificiales a misfit(m) cuando el simplex genere modelos en el exterior
del recinto permitido.
- 165 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
OPERADOR
Optimización Local
CPU 02
Datos experimentales.
Límites del espacio de los modelos.
Algoritmo BackusGilbert.
CPU 01
CPU i
Algoritmo Downhill
Simplex
modelos iniciales
- Listado de modelos salientes por
grado de ajuste.
- Análisis estadístico.
- Solución Local.
- Grado de ajuste.
CPU N
Figura 4.4.1. Esquema del algoritmo híbrido de inversión.
Una vez satisfecha la condición de término de la optimización local, cada procesador envía al
~ resultante de ésta, así como el valor de misfit( m
~ ) correspondiente,
máster el modelo m
quedando libre para la recepción de un nuevo modelo (la cual se realiza inmediatamente). El
programa termina, tras un número prefijado de modelos iniciales tratados, ordenando los
modelos devueltos en función del misfit(m) y realizando los análisis estadísticos que se indicaron
en la Sección 4.1.2. Un script de MATLAB permite una sencilla representación de la salida (p.
e. Fig. 4.4.4b). Como se ha indicado antes, la generación de modelos aleatorios está centralizada
en el ordenador máster. Aunque en la versión actual las únicas ventajas de esto son de tipo
organizativo, se facilita así la evolución del programa hacia futuras versiones (por ejemplo, la
integración de un algoritmo genético como método de búsqueda global, que requiere que un solo
procesador tenga acceso y combine los modelos de las distintas poblaciones).
El programa permite que los procesadores trabajen a velocidades distintas (en función de sus
características, del número de procesos activos,…) ya que los modelos se van reponiendo
conforme éstos van quedando libres. Está implementada la posibilidad de limitar el tiempo
empleado por los procesadores en el cálculo directo y de que cada procesador guarde un registro
de los modelos que se van generando durante la minimización local.
- 166 -
Un algoritmo para la inversión del modelo de estructura.
Cálculos directos implementados.
En la Tabla 4.4.1 se indica, para cada algoritmo, qué tipo de datos pueden utilizarse en la
inversión (independientemente o de forma conjunta) y se resumen algunas características de la
implementación. En caso de inversiones conjuntas, el usuario puede decidir los pesos que se dan
a los distintos observables. En el caso de las curvas de dispersión, se admiten múltiples modos.
Como cálculo directo del HVSR se toma, para cada frecuencia, el menor de los dos valores
siguientes: i) el valor absoluto de la elipticidad del modo fundamental Rayleigh a esa frecuencia,
ii) la máxima amplitud del HVSR experimental. Este procedimiento disminuye los efectos de
una posible divergencia en el cálculo directo en torno a la frecuencia de resonancia.
Tabla 4.4.1. Características de los distintos modos de inversión.
Veloc. Fase. Rayleigh
Sí
Monte Carlo &
Inversión Linealizada
Sí
Veloc. Fase. Rayleigh
Sí
Sí
Sí
HVSR
Sí
No
Sí
Sí
Sólo en la generación de
modelos iniciales.
Iteraciones en espesores o
velocidades.
Sí
Monte Carlo
Parametrización
Arbitraria de los
modelos
Monte Carlo &
Downhill-Simplex
Sí
Análisis estadístico implementado.
Los análisis estadísticos descritos en las secciones 4.1.1. y 4.1.2. han sido programados en un
código de MATLAB que trabaja sobre el fichero de salida del programa híbrido de inversión, i.
e. una lista de Nm modelos probados ( m l ; l = 1, …, Nm) con sus correspondientes valores de la
función costo. Por efecto de los algoritmos de optimización local, los modelos evaluados distarán
de estar uniformemente distribuidos en M, apareciendo más concentrados en la región (o
regiones) donde misfit(m) es pequeño. Por tanto, para calcular el modelo medio m y la matriz
~
de covarianzas C M de (4.1.7) y (4.1.8), además de pesar cada modelo según su densidad de
probabilidad a posteriori habrá que añadir pesos adicionales que den cuenta de la proporción de
la región M representada por cada uno. Con este objetivo, se han calculado los diagramas de
Voronoi asociados al conjunto de modelos. Para cada uno se define su celda de Voronoi como la
región de M limitada por puntos equidistantes a algún otro modelo. La proporción entre el
volumen (en el espacio dim(M)-dimensional) de la celda asociada a un modelo y el volumen
- 167 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
total de M es una estimación del peso correspondiente. Combinando los dos tipos de pesos se
tiene weight( m p ):
1
Vol (m p ) exp[ misfit (m p )]
,
2
weight (m p ) N m
1
l Vol (m l ) exp[ 2 misfit (m l )]
(4.4.1)
siendo Vol( m p ) el volumen de la celda de Voronoi correspondiente al modelo m p . Como se
~
comentó anteriormente, una vez evaluados m y C M , se pueden extraer las desviaciones
estándar de los parámetros de m . En el programa, emplea el software MPT (Multi Parametric
Toolbox, disponible en http://control.ee.ethz.ch/~mpt/) junto a MATLAB para calcular el
diagrama de Voronoi en cualquier número de dimensiones dim(M). En dos dimensiones, y a
modo de ilustración, se muestra el procedimiento en la figura 4.4.2. En las Figs. 4.4.4b y d se
muestra parte de la salida del código para un ejemplo sintético: modelos salientes ordenados
según misfit(m) (escala de grises), mejor modelo (en rojo), modelo medio y desviación típica
(azul) y matriz de covarianzas normalizada.
4.4.1 COMPROBACIÓN DEL ALGORITMO
Se ha comprobado el programa aplicándolo a la inversión de una curva de dispersión Rayleigh
sintética correspondiente a un modelo conocido. En este caso, se ha utilizado un modelo de dos
capas sobre semiespacio que fue usado por Yamanaka (2005) para el testeo de varios métodos de
inversión globales. El modelo está listado en la Tabla 4.4.2. Se consideró exclusivamente el
modo fundamental y un rango de frecuencias entre 2 y 25 Hz.
Test a número de evaluaciones constante
En primer lugar, buscamos qué relación entre el número de modelos iniciales (Nmi) generados y
el número de iteraciones realizadas por el algoritmo Simplex optimiza los resultados en nuestro
ejemplo. Para ello, fijamos el coste computacional en la evaluación de 3000 modelos y
ensayamos distintos valores del número de iteraciones (Nit) de modo que se mantenga Nmi x Nit =
3000.
En la Figura 4.4.3 se representa el grado de ajuste del mejor modelo y la media del de los cinco
mejores modelos salientes, en función de Nmi.. Los mejores resultados se obtuvieron usando 20 y
25 modelos iniciales, correspondiendo a 150 y 120 iteraciones respectivamente. Como se
observa, este problema de 5 parámetros libres es aún lo suficientemente sencillo como para que
sea posible obtener buenas soluciones mediante unas pocas aplicaciones del algoritmo Simplex.
- 168 -
Un algoritmo para la inversión del modelo de estructura.
1
0.9
0.8
0.7
Variable 2
0.6
0.5
0.4
0.3
0.2
0.1
0
0
0.2
0.4
0.6
0.8
1
Variable 1
Figura 4.4.2. Ejemplo de integración en un espacio de los modelos bidimensional. Los puntos verdes representan los
modelos evaluados y el punto rojo es el mejor de ellos (menor valor de la función costo). Se muestra la partición en
celdas de Voronoi. El color de cada celda es más cercano al blanco cuanto mayor es el peso del modelo que
contiene, que depende del valor que toma la distribución probabilidad a posteriori y del volumen de la celda. El
modelo medio y la desviación típica en las variables se muestran en azul.
Tabla 4.4.2. Parámetros del modelo e intervalos de generación de modelos iniciales.
Variables Independientes
Capa
VS (m/s)
h (m)
(g/cm3)
VS (m/s)
h (m)
1
100
3
1.5
70 a 130
1 a 11
2
250
5
1.8
175 a 325
1 a 11
3
500
2.0
350 a 650
Los resultados obtenidos por Yamanaka (2005), en condiciones análogas y con un mismo costo
computacional, mediante un Algoritmo Genético están representados en la Figura 4.4.4(a) por la
línea amarilla. El área de búsqueda de cada variable se codificó a 8 bits (25x8 = 1.1 1012 posibles
modelos). Usó una población de 30 modelos que evolucionaron a lo largo de 100 generaciones.
La línea verde representa el modelo obtenido con Monte Carlo + Downhill Simplex usando 20
modelos iniciales. Se observa que los resultados obtenidos con este procedimiento híbrido son, al
- 169 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
menos en este problema concreto, mejores que los del Algoritmo Genético para un coste
computacional similar (en términos de cálculos directos realizados).
Figura 4.4.3. Grado de ajuste del mejor modelo encontrado (puntos) en función del número de modelos iniciales
(Nmi) para un total de 3000 modelos probados. Las iteraciones han sido realizadas con el método Simplex. Los
triángulos corresponden al promedio de los grados de ajuste de los 5 mejores modelos encontrados. El grado de
ajuste representado en el eje de ordenadas es 100 100 dim(D ) ( g j (m) d
j 1
obs j
dim(D )
) 2 (d
j 1
obs j
)2 .
En la figura 4.4.4c se pueden verificar visualmente las diferencias en el grado de ajuste. Sin
embargo, aunque el mejor modelo obtenido por nuestro método (línea verde) reproduce muy
bien las capas superficiales, da una profundidad del semiespacio algo más alejada de la real. En
la Figura 4.4.4b también se muestran los resultados de la aplicación del algoritmo descrito sobre
una muestra más amplia de modelos aleatorios (1000 modelos aleatorios, 150 iteraciones por
modelo). También se calculó el modelo medio y su dispersión para el conjunto de los modelos
salientes de la optimización local, que se representa en 4.4.4a y b con línea azul (se siguió el
método descrito en esta sección; los modelos salientes que están fuera de los rangos de la Tabla
4.4.2. fueron excluidos de la estadística). El modelo obtenido a partir de sólo 30 modelos
iniciales es perfectamente consistente con los resultados estadísticos obtenidos con 1000
modelos iniciales (no así el obtenido con el GA, que está fuera del rango de una desviación
típica). La matriz de covarianzas normalizadas representada en la Fig. 4.4.4d muestra
dependencias significativas entre el espesor y la velocidad de la primera capa y, en menor
medida, entre el espesor de la segunda capa y la velocidad del semiespacio.
- 170 -
Un algoritmo para la inversión del modelo de estructura.
Figura 4.4.4. (a) Modelos resultantes de la inversión usando 3000 evaluaciones de la función costo: con algoritmo
genético en amarillo; con el algoritmo híbrido descrito aquí (y 20 modelos iniciales x 150 iteraciones con simplex)
en verde. El modelo real se muestra en magenta. El resto de las líneas se explican en la subfigura (b).
(b) En rojo, mejor modelo obtenido tras 150000 evaluaciones (1000 modelos iniciales x 150 iteraciones con
Simplex). El resto de los modelos recibidos de los procesadores secundarios están representados en escala de grises
según el grado de ajuste. En azul se representa el modelo medio (ver texto). (c) Curvas de dispersión
correspondientes a los modelos obtenidos con el procedimiento híbrido (verde) y con el algoritmo genético
(amarillo) usando ambos 3000 evaluaciones. Para los cálculos de las barras de error (subfiguras a y b) y de los
valores de misfit(m) (subfigura b) se asumió una desviación típica constante en los datos valiendo el 5% del valor
r.m.s. de éstos, esto es, 18.3m/s. (d) Matriz de covarianzas a posteriori normalizada obtenida para la inversión
realizada en la subfigura (b). El elemento j,l representa C Mjl / C Mjj C Mll , estando acotado entre 0 y 1.
4.4.2. CÁLCULO DE LA EFICIENCIA EN LA PARALELIZACIÓN.
El funcionamiento de un algoritmo paralelizado generalmente se evalúa en términos del
incremento de velocidad o de la eficiencia (Sheen et al., 2006). El incremento de velocidad (S) se
define generalmente como la relación entre el tiempo invertido cuando el programa se ejecuta en
un solo procesador y el tiempo empleado cuando se ejecuta en un clúster de n procesadores,
- 171 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
S (n) T1 / Tn .
(4.4.2)
En nuestro caso, el ordenador máster es excluido en el cómputo de n. El cociente de S(n) entre el
número de procesadores da la eficiencia de la paralelización (E):
E (n) S (n) / n
(4.4.3)
De acuerdo con la definición, la eficiencia es igual a 1 cuando el incremento de velocidad es
lineal con el número de procesadores. En nuestro caso, como en la mayoría de las
implementaciones en paralelo, el incremento de velocidad se sitúa por debajo del
comportamiento lineal (Figura 4.4.5) debido al aumento del tiempo de comunicación con el
tamaño del clúster. Conforme el tamaño del clúster crece, aumenta además la probabilidad de
que cuando uno de los procesadores secundarios termina su tarea encuentre al máster ocupado en
transmitir respuesta a alguno de los otros ordenadores.
Figura 4.4.5. Comportamiento del algoritmo Búsqueda Aleatoria + Simplex. La línea continua representa el
comportamiento ideal. Los círculos corresponden al comportamiento encontrado. En todos los casos, se ejecutó el
problema establecido en la Tabla 4.4.2 utilizando 20 modelos iniciales y 150 iteraciones por modelo inicial. En
abscisa, se representa el número de procesadores excluido el máster.
4.5. RESUMEN Y CONCLUSIONES DEL CAPÍTULO 4.
En este capítulo se han descrito diferentes métodos de inversión, tanto de tipo global como
- 172 -
Un algoritmo para la inversión del modelo de estructura.
orientados a búsquedas locales en el espacio de los modelos M. También se han resumido los
elementos estadísticos necesarios de la teoría de la inversión según una formulación bayesiana.
Se ha presentado un código de inversión híbrido que combina métodos de inversión global y
local: búsqueda aleatoria, downhill simplex e inversión linealizada. El programa está adaptado
para su ejecución en paralelo en equipos de cálculo masivo. Asimismo, se ha presentado una
herramienta desarrollada en MATLAB® que permite la representación de los resultados de la
inversión y el cálculo del modelo medio y de la matriz de covarianzas, aproximando las
necesarias integraciones sobre el espacio M mediante un método basado en diagramas de
Voronoi. Una aplicación de estos códigos a datos reales puede encontrarse en la Sección 5.3.4.
Se ha realizado un ejemplo sintético de inversión utilizando el programa desarrollado,
obteniéndose muy buenos resultados (desajustes por debajo del 0.0002% en términos de
dim(D )
j
( g (m) d
j 1
obs j 2
)
dim(D )
frente a (d
j 1
) ). En comparación con un algoritmo genético, y a
obs j 2
igual número de cálculos directos, el método híbrido proporcionó un mejor ajuste.
A la vista de las Figuras 4.4.3 y 4.4.4 se advierte que es necesario usar una relación “equilibrada”
entre número de modelos iniciales y el número de iteraciones para optimizar el rendimiento del
algoritmo. En un extremo, el uso de un solo modelo inicial, aun no estando muy alejado del
modelo solución, no garantiza la convergencia a una solución razonable (p. e., hay algunos
modelos muy discrepantes del verdadero en Figura 4.4.4b que proceden de modelos iniciales
dentro de los rangos en la tabla 4.4.2). En el otro, una mera exploración aleatoria de los
intervalos de búsqueda resulta relativamente ineficiente (Figura 4.4.3 para Nmi altos),
requiriéndose un aumento sustancial del número de modelos evaluados para alcanzar resultados
similares. Desgraciadamente, no parece fácil encontrar una regla general, debiéndose buscar este
equilibrio entre los algoritmos mediante prueba y error.
Se ha realizado un test de eficiencia para la implementación paralelizada del algoritmo híbrido
utilizando un máximo de 11 procesadores. Aunque hay una pérdida paulatina de eficiencia
conforme el número de procesadores crece, ésta se sitúa, como poco, en el entorno del 80%,
manteniéndose la tendencia decreciente del tiempo de cálculo.
- 173 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
4.6. APÉNDICES DEL CAPÍTULO 4.
Apéndice IV.A. Evaluación de la fiabilidad del ajuste
~ que minimiza misfit( m ) es posible evaluar cómo de bueno es
Una vez encontrado el modelo m
el ajuste alcanzado. Para ello, dada la distribución M (m) definida por las medidas
experimentales d
obs j
y j , j=1,…, dim(D) en (4.1.3), se puede evaluar que probabilidad hay
de que aparezcan valores tan alejados de d
obs
~ ) o más.
como los del cálculo directo g( m
~ ) se distribuye como una distribución chi-cuadrado de = dim(D) Utilizamos que misfit( m
~ ) en
dim(M) grados de libertad (Press et al., 1992). Por tanto, introduciendo el valor de misfit( m
la Tabla IV.A.1. se puede obtener la probabilidad q = 1-p de que ese grado de desajuste se
obtuviera por azar. Si q es muy baja, se puede concluir que el modelado del problema es
deficiente o que los errores experimentales están subestimados.
Tabla IV.A.1. Distribución
2, p
acumulativa como función de los grados de libertad y del nivel de confianza.
Apéndice IV.B. Híper-elipsoide de error
~ restringiéndonos a un grupo de
Estudiemos ahora las incertidumbres en el valor de m
~ ,…, m
~
parámetros de interés. La función misfit( m1 ,…, m ) = misfit( m1 ,…, m , m
dim(M ) ) 1
~ ), que depende del subconjunto de parámetros m ,…, m , está también distribuida
misfit( m
1
como una distribución chi-cuadrado de grados de libertad (Press et al., 1992). Por tanto, la
región del subespacio -dimensional de M en la que la probabilidad de que misfit( m1 ,…, m )
esté es mayor que p, está limitada por la curva:
- 174 -
Un algoritmo para la inversión del modelo de estructura.
~
(m1 m
1
~
m2 m
2
~ 1
~ )t C
... m m
M
1,...,
~
(m1 m
1
~
m2 m
2
~ ) 2 ,
... m m
,p
(IV.B.1)
~
donde 2, p se puede leer de la Tabla IV.A.1 y C M1
1,...,
es la matriz formada por la intersección
~
de las filas 1,..., y las columnas 1,..., de C M1 . Por ejemplo, si =1 (nos interesara un solo
~ 2 1 2 , lo que es en
parámetro) y fijamos el 68.3% de nivel de confianza, tenemos m1 m
1
general válido para cualquier variable j (i. e., la región buscada es el intervalo
~ j m
~ j ). En 2D (i. e. si =2) la ecuación (IV.B.1) limita una elipse de error, en 3D
m
j
j
un elipsoide y un hiper-elipsoide para valores superiores de . Los respectivos ejes principales se
~
pueden calcular como los autovectores de C M1 1,..., .
- 175 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
- 176 -
CAPÍTULO 5
APLICACIONES
5.1. CARACTERIZACIÓN DE LA COBERTURA SEDIMENTARIA DEL POLJE DE
ZAFARRAYA, SUR DE ESPAÑA, MEDIANTE MEDIDAS DEL COCIENTE ESPECTRAL
H/V DE RUIDO AMBIENTAL.
La estructura sedimentaria de la cuenca de Zafarraya, una depresión kárstica localizada en el sur
de España, ha sido estudiada por García-Jerez et al. (2006a) usando el cociente espectral H/V
para ruido ambiental (HVSR) en combinación con información geológica. Para ello, se realizó
un ajuste entre la frecuencia del pico principal del cociente espectral y la profundidad del
basamento usando 17 puntos de la cuenca en los que se disponía de información geotécnica.
Seguidamente se utilizó la relación ajustada para inferir la profundidad del basamento en una
malla densa de puntos a partir de las frecuencias de resonancia medidas. Además, se obtuvo una
relación exponencial que describe la variación de la velocidad de onda S con la profundidad para
la cobertura sedimentaria de la cuenca, asumiendo su homogeneidad lateral (hasta alcanzar el
basamento, de profundidad variable) y variaciones suaves en vertical, debidas a la edad de los
materiales y al incremento de la presión confinante. En los detalles metodológicos, se sigue el
trabajo pionero de Ibs-von Seht and Wohlenberg (1999), si bien, se comparan varias maneras
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
alternativas para relacionar teóricamente los modelos de suelo 1D con las frecuencias de
resonancia.
5.1.1. INTRODUCCIÓN
La cuenca de Zafarraya (Fig. 5.1.1), es una gran depresión kárstica ubicada en el sur de la
Península Ibérica (López-Chicano et al., 2002). Esta región meridional sufre la mayor
peligrosidad sísmica de la Península, debida a la colisión entre las placas euroasiática y africana.
(b)
(a)
Figura 5.1.1. a) Situación de la cuenca de Zafarraya, en el sur de España. b) Topografía de la cuenca de Zafarraya.
Los puntos rellenos indican los lugares en que se realizaron medidas de microtremores, aproximadamente en los
vértices de una malla cuadrada de 500 m de lado. La línea continua indica la situación del corte geológico mostrado
en la figura 5.2, uniendo un conjunto de sondeos geoeléctricos (puntos huecos).
Buen ejemplo de ello es el terremoto de Andalucía, que alcanzó magnitud 6.8 según el Instituto
Andaluz de Geofísica (www.ugr.es/~iag) e intensidad epicentral X. Este evento causó grandes
daños el 24 de diciembre de 1884 en varias localidades situadas en la cuenca y en sus
proximidades.
Algunos trabajos han sido ya publicados sobre la respuesta sísmica de la cuenca de Zafarraya.
Los primeros estudios realizados usando registros de ruido ambiental fueron presentados por
Morales (1991) y Morales et al., (1991). Estos autores analizaron el movimiento horizontal en 15
puntos situados a lo largo de dos perfiles perpendiculares (aproximadamente del punto I1 al L4 y
del E5 al K2 en la Fig. 5.1b), encontrando una frecuencia dominante en el espectro en torno a
los 2.8 Hz, que permanecía casi constante en toda la cuenca. Sin embargo, Luzón (1995) y
Luzón et al. (2004) llevaron a cabo simulaciones en modelos homogéneos 2D y 3D bajo
incidencia de ondas planas usando el método IBEM (Indirect Boundary Element Method) en los
- 178 -
Aplicaciones.
que encontraron que la frecuencia fundamental de la función de transferencia es dependiente de
la profundidad local al basamento. Las amplificaciones del movimiento del suelo encontradas
por estos autores fueron de hasta 12 en las zonas más profundas.
5.1.2. CONTEXTO GEOLÓGICO
Como se indicó, la cuenca de Zafarraya es una gran (22 km2) depresión kárstica Neógena situada
en el suroeste España y enclavada en la cordillera Bética. Tiene una longitud de unos 10 km
siguiendo una orientación ESE-WNW (Fig. 5.1.1). La anchura máxima (3.5 km) aparece en el
sector
occidental.
La
altitud
media
ronda
los
900m
sobre
el
nivel
del
mar,
decreciendosuavemente hacia el oeste y hacia el norte. El borde norte está limitado por “Sierra
Gorda”, una gran masa carbonatada de caliza blanca del Jurásico, mientras que en el resto del
contorno aparecen los montes de Zafarraya, compuestos de calizas dolomíticas.
En esta área se realizaron varias investigaciones anteriores usando métodos geoeléctricos
(López-Chicano, 1989) y geotécnicos (Martín Vivaldi et al., 1971) que revelaron cierta
complejidad en la estructura sedimentaria de la cuenca. Estos estudios muestran una capa
superficial formada por arenas, limos y conglomerados aluviales con un espesor máximo que no
alcanza los 10 m en el punto más
profundo
(López-Chicano,
1992).
Existe una segunda capa, compuesta de
arcillas y limos aluviales, con un
espesor máximo de unos 50 m en el
sector
oriental.
descansan
Estos
directamente
materiales
sobre
el
basamento carbonatado mesozoico en
el oeste, mientras que cerca del borde
sur, y en la parte central hay un estrato
Figura 5.1.2. Sección geológica de la cuenca de Zafarraya,
grueso
correspondiente a la línea indicada en la Fig. 5.5.1. Leyenda: 1,
principalmente, existen calcarenitas
Materiales carbonatados del Mesozoico; 2, materiales margosos y
ocupando el lugar de las margas. Un
calcáreos del periodo cretácico; 3, calcarenitas; 4, margas
esquema de la geología en la sección
azuladas del Mioceno superior; 5, arcillas y limos aluviales; 6,
arenas, limos y conglomerados aluviales; 7, sondeo geoeléctrico.
- 179 -
margas.
Al
este,
longitudinal marcada en Fig. 5.1.1b se
muestra
Adaptado de López-Chicano (1992).
de
en
la
figura
5.1.2.
La
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
profundidad máxima del estrato hasta la caliza no está bien determinada, aunque se sabe que
alcanza al menos los 200 m en algunas zonas alrededor del lecho del arroyo La Madre (LópezChicano, 1992). Este arroyo estacional, fluye desde el sureste hasta los sumideros del noroeste,
perdiendo un 60% del caudal antes de alcanzar el centro de la cuenca debido a la gran
infiltración a través de los depósitos aluviales. Otros arroyos y sumideros menores aparecen en el
borde oeste, que es un área complicada, con afloramientos calizos puntuales. Más información
sobre la hidrogeología de esta zona puede encontrarse en López-Chicano et al. (2002). Aunque
existen varias poblaciones situadas en los bordes de la cuenca (Zafarraya, en los afloramientos
del oeste, Ventas de Zafarraya en la parte central del borde sur y El Almendral en el centro del
borde norte, ver Fig. 5.1.1), la mayor parte de la superficie se emplea para la explotación
agrícola.
5.1.3. MEDIDAS DE MICROTREMOR
En julio de 2004, obtuvimos 86 registros de microtremor, aproximadamente en los vértices de
una malla regular cuadrada de 500 metros de lado, cubriendo la práctica totalidad de cuenca (Fig.
5.1.1). En contraste con Morales et al. (1991), quienes usaron sólo componentes horizontales,
nosotros registramos ruido ambiental en las tres componentes. Los instrumentos empleados
fueron dos sismómetros de corto periodo trabajando a una frecuencia de muestreo de 100 Hz.
Uno de ellos constaba de un digitalizador SPC-35 y tres sensores VSE-15D con respuesta plana
en un rango de frecuencias entre 0.25 y 70 Hz. El otro, tenía conectados sensores Mark L4-C con
una respuesta aceptable entre 0.65 y 40 Hz. Ambos dispositivos habían sido empleados
previamente en varios trabajos (Navarro et al., 2001; Almendros et al., 2004; Al Yuncha et al.,
2004). Los sensores fueron fijados a plataformas niveladas, colocadas directamente sobre el
suelo. El tiempo de registro fue de 10 minutos, en los que se evitó la actividad de la maquinaria
agrícola en el entorno del punto de medida. Tras las correcciones instrumentales, cada registro
fue dividido en un conjunto de ventanas de 20.48s de longitud, parcialmente solapadas
(centradas cada 2.56s). Se admite que esta longitud es apropiada para el cálculo numérico de la
FFT para cualquier frecuencia mayor de 0.5 Hz, pues contiene al menos 10 ciclos de cada
periodo analizado. Los módulos cuadrados de las transformadas de los registros norte-sur U N y
este-oeste U E , que son proporcionales a las respectivas densidades espectrales de potencia,
fueron compuestos y divididos por el del registro vertical W para obtener el cociente espectral
2
H/V ó HVSR según HVSR( f ) U N ( f ) U E ( f )
2
W ( f ) . Los cocientes espectrales fueron
calculados separadamente en todos los intervalos temporales y representados en un diagrama
- 180 -
Aplicaciones.
dependiente del tiempo (ratiograma) tal como se muestra en la figura Fig. 5.1.3b.
Figura 5.1.3. Análisis de estabilidad del HVSR para el punto I2. (a) Registro de ruido ambiental en las tres
componentes. (b) Representación del cociente espectral en función del tiempo. (c) Promedio temporal de las
amplitudes espectrales de las componentes horizontal (línea continua) y vertical (línea discontinua). (d) Promedio
del cociente espectral (línea continua). La desviación estándar se muestra con línea discontinua. Obsérvese la
discrepancia entre la frecuencia de máxima amplitud en la horizontal y la frecuencia de resonancia (definida como la
frecuencia del pico principal del HVSR).
Seguidamente, el registro de velocidad es inspeccionado visualmente y los cociente H/V
promediados para las ventanas con buena calidad, evitando los transitorios debidos a fuentes
cercanas como coches o pasos. Se comprobaron varias elecciones de longitud de ventana (30s y
40.96s) y de los grados de solapamiento sin que aparecieran variaciones significativas en los
resultados.
Siguiendo este procedimiento se pudieron determinar las frecuencias de resonancia en diferentes
puntos de la cuenca dentro de un ancho rango espectral. La estabilidad del pico principal fue
comprobada, descartando los puntos con resultados poco concluyentes (picos inestables).
Aunque frecuentemente se encontró un alto nivel espectral en la componente horizontal en torno
a 3Hz, esta frecuencia no correspondió siempre a la del pico principal en el HVSR, como se
aprecia en las figuras 5.1.3c y 5.1.3d. Las frecuencias de resonancia encontradas en cada punto
de la malla se muestran en la Fig. 5.1.4.
- 181 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 5.1.4. Mapa de frecuencias de resonancia (en Hz) obtenidas de los HVSRs. Los sitios en los que el cociente
espectral presenta varios picos similares o poca estabilidad están marcados por una X. Los triángulos identifican los
sitios con cocientes espectrales prácticamente planos o con picos anchos a alta frecuencia (15 Hz).
5.1.4. AJUSTE DEL PERFIL DE VELOCIDADES DE ONDA S Y DE LA RELACIÓN
FRECUENCIA-PROFUNDIDAD.
Dentro de cada estrato sedimentario, compuesto de materiales geológicos aproximadamente
homogéneos, el módulo de rigidez se incrementa típicamente con la profundidad de forma suave
(pero a mayor ritmo que la densidad de masa) debido a la presión de confinamiento. La
consiguiente variación de la velocidad de onda S puede aproximarse por una expresión del tipo:
VS ( z ) VS 0 (1
z x
) ,
z*
zh
(5.1.1)
(ver Ibs-von Seht and Wohlenberg, 1999) donde VS es la velocidad de onda S a la profundidad z
en la capa sedimentaria (0 < z < h ), VS 0 es la velocidad en la superficie, x es un parámetro que
controla la dependencia con la profundidad y z * es una distancia de referencia que controla el
comportamiento para valores pequeños de z . La frecuencia fundamental de resonancia de la
onda S para tal estructura sedimentaria puede ser aproximada a partir de su tiempo de viaje en la
- 182 -
Aplicaciones.
capa (Ibs-von Seht and Wohlenberg, 1999):
h
1
dz
0
4f
VS ( z )
(5.1.2)
A partir de (5.1.1) y (5.1.2) se obtiene:
(1 x)
h( f ) z * VS 0
1
4 fz *
1 /(1 x )
z* .
(5.1.3)
La ecuación (5.1.3) permite calcular el espesor h de la cobertura sedimentaria a partir de
medidas experimentales de la frecuencia de resonancia f y de un ajuste previo de los
parámetros x , VS 0 y z * . Una aproximación ligeramente más simple es la usada por Delgado et
al. (2000a) y Delgado et al. (2000b), que corresponde a una ley puramente potencial entre
profundidad y velocidad:
z
VS ' ( z ) VS 0
z *
x
(5.1.4)
Aquí, VS ' ( z ) es una buena aproximación a VS (z ) cuando z >> z * . En tal caso, si x < 1, la
ecuación (5.1.2) conduce a:
1 /(1 x )
(1 x)VS 0
h' ( f )
x
4 fz *
,
(5.1.5)
que tiene la ventaja de permitir un ajuste lineal en escala logarítmica, con un valor de la
pendiente B 1 /( 1 x ) .
Para llevar a cabo un ajuste de los parámetros anteriores en la cuenca de Zafarraya, se consideró
un conjunto de 17 puntos de la malla en los que la profundidad de la capa sedimentaria estaba
bien determinada mediante sondeos geoeléctricos cercanos y con una frecuencia de resonancia
determinada con claridad. El ajuste de la ecuación (5.1.3) con tales datos, obtenido mediante un
método de minimización iterativa linealiazada, se muestra en la figura 5.1.5a. Los valores
- 183 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
ajustados para z * fueron mucho menores que la profundidad del punto más superficial
considerado (11 m de sedimentos), así que z * pudo ser fijado a 1m, por simplicidad, sin
influencia en el rango de profundidades en el que hay datos.
Figura 5.1.5. (a) Frecuencias del pico principal del HVSR en función de la profundidad al basamento resistivo
obtenida a partir de sondeos geoeléctricos. La línea discontinua muestra la relación (5.1.6) ajustada para la cuenca
de Zafarraya. La línea continua muestra el ajuste de una relación alternativa basada en ondas superficiales (ecuación
5.1.7). (b) Elipses de error para los parámetros ajustados
x y VS 0 de la ecuación (5.1.6), considerando niveles de
confianza del 68.3% (línea discontinua) y del 95% (línea continua).
La ecuación resultante, que es válida para profundidades de 11 a 125 m, fue:
VS ( z ) 437(1 z) 0.136 ,
(5.1.6)
donde VS está en m/s y z en m. El error cuadrático medio de los datos respecto al ajuste fue de
unos 6m. Las incertidumbre de los parámetros, considerando niveles de confianza del 68% y del
95% (ver Nash and Sofer, 1996; Press et al., 1992; entre otros) se muestran en la Fig. 5.1.5b. Al
carecer de una evaluación adecuada de las incertidumbres en los valores de profundidad de los
puntos ajustados, estas no han sido consideradas en el ajuste.
Teniendo en cuenta que el ruido sísmico parece estar compuesto principalmente por ondas
superficiales (p. e. Konno and Ohmachi, 1998), se ha explorado una aproximación alternativa
usando el procedimiento diseñado por Arai and Tokimatsu (2000) (y descrito en la Sección 2.1.7)
para el cálculo directo de las frecuencias de resonancia. En este procedimiento, que reemplazará
a la ecuación (5.1.2), la potencia relativa de las ondas Rayleigh y Love venía determinada por el
parámetro , de forma que éstas últimas adquieren mayor importancia conforme aumenta,
- 184 -
Aplicaciones.
mientras que sólo se consideran las primeras para = 0. Las frecuencias de resonancia teóricas
se tomaron de los HVSR simulados para los sitios en los que la profundidad era conocida y para
cada pareja de parámetros ( VS 0 , x ) probados. En estos cálculos, la cobertura sedimentaria fue
dividida en tantas capas de 5m de espesor como fueran necesarias, asignándoles velocidades de
onda S obtenidas por la ecuación (5.1.1) y tomando un valor de 2000 m/s para el semiespacio
carbonatado (Schenková and Zahradnik, 1996). El cociente de los esfuerzos horizontal y vertical
en la fuente ( ) se tomó como la unidad. Otros detalles del cálculo pueden consultarse en
García-Jerez et al. (2006a). El mejor ajuste entre las frecuencias medidas y calculadas se obtuvo
para:
VS ( z ) 214(1 z ) 0.305
(5.1.7)
que corresponde a la línea continua en la Fig. 5.1.5a. El error cuadrático medio del ajuste es de
0.64 Hz. En la figura 5.1.6 se muestran ejemplos del HVSR calculado por este segundo método,
para varios valores de , en el punto K5 (con 52 m de profundidad al basamento) usando el
modelo de suelo definido por la ecuación (5.1.7). Se observa que el HVSR calculado, aunque
reproduce la frecuencia de resonancia, no ajusta correctamente la amplitud del pico principal. Sin
embargo, dicha amplitud no juega ningún papel en el presente estudio. Se puede observar como
las hipótesis sobre el método de cálculo para las frecuencias de resonancia pueden tener una
influencia significativa sobre el modelo de suelo obtenido. Nótese que la ecuación (5.1.2) puede
incluso no ser una estimación suficientemente exacta de la frecuencia de resonancia de ondas S
verticalmente incidentes en medio heterogéneos (ver la diferencia significativa entre el primer
máximo de la función de transferencia, mostrada en la figura 5.1.6 con línea negra discontinua, y
la frecuencia de resonancia calculada a partir del tiempo de viaje, que se muestra con una línea
discontinua vertical). Aunque es una cuestión en discusión, el empleo de métodos basados en
ondas superficiales (incluyendo las Love) puede ser preferible, ya que el microtremor parece
componerse principalmente de este tipo de ondas (ver trabajos de Aki, 1957; Lachet and Bard,
1994; Tamura, 1996; Konno and Ohmachi, 1998; Arai and Tokimatsu, 2000; Ohori, 2002 y
discusión en el Capítulo 1 y la Sección 2.1).
5.1.5. DISCUSIÓN.
Las relaciones f - h calculadas para la cobertura sedimentaria de la cuenca de Zafarraya son
comparables a las encontradas en otras cuencas sedimentarias. Algunos de estos resultados
previos se presentan en la Fig. 5.1.7a. En aquellos estudios en los que se obtuvo una ley
- 185 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 5.1.6. HVSRs medido (línea gris continua) y teóricos (líneas negras) para el punto K5.
Estas últimas se obtienen usando el modelo de suelo derivado de la ecuación (5.1.7) hasta la
profundidad del basamento. Las etiquetas indican el valor de empleado. La línea
discontinua negra muestra la función de transferencia 1D para ondas S con incidencia
vertical. La línea vertical discontinua muestra la frecuencia de resonancia calculada para la
estructura a partir de la ecuación (5.1.2).
0
(a)
140
-50
120
100
Depth (m)
Thickness (m)
(b)
80
60
-100
-150
40
-200
20
0
0
1
2
3
4 5 6
7
Frequency (Hz)
8
9
10
-250
0
500
1000
S-wave velocity (m/s)
1500
Figura 5.1.7. (a) Comparación entre las relaciones frecuencia-profundidad para la cuenca de Zafarraya
calculadas usando la ecuación (5.1.2) (línea negra discontinua) o usando un método basado en ondas
superficiales (línea negra continua). También se muestran los resultados obtenidos en estudios similares
llevados a cabo en otras cuencas: desembocadura del Rin con línea gris continua (Ibs-von Seht and
Wohlenberg, 1999), área de Colonia con línea discontinua (Parolai et al., 2002), valle del río Segura con línea
punteada gris (Delgado et al., 2000a), área de Florencia con punteada negra (D’Amico et al., 2008). (b) Velocidad de
onda S en función de la profundidad dentro de los materiales sedimentarios en las cuencas representadas en la
subfigura (a).
- 186 -
Aplicaciones.
estrictamente potencial entre f y h ( h Af B ) se pueden obtener VS 0 y x comparando con la
ecuación (5.1.5) y tomando z * = 1m. Las funciones VS (z ) obtenidas para estas cuencas se
representan en la Fig. 5.1.7b (ver también Tabla 5.1.1) junto con los resultados correspondientes
a la cuenca de Zafarraya presentados en las ecuaciones (5.1.6) y (5.1.7).
En la literatura al respecto se han
Tabla 5.1.1. Parámetros x y VS 0 para la relación entre z y V S
estudiado estos parámetros usando
(Ec. 5.1.6) obtenida en varias estructuras sedimentaria
distintos métodos. Por ejemplo, Ohta
europeas. El parámetro z * ha sido fijado a 1 m.
and
Goto
(1978)
obtuvieron
relaciones potenciales entre VS y z a
partir de datos geotécnicos, con un
exponente x = 0.312 ( B = 1.454) y
valores de VS 0 dependientes de la
textura del suelo. Expresiones más
detalladas (Hardin and Drnevich,
1972) muestran que el módulo de
rigidez G en suelos particulados es
aproximadamente proporcional a la
Situación
Cuenca de Zafarraya (basado en la
ecuación 1)
Cuenca de Zafarraya (método de ondas
superficiales)
x
VS 0 (m/s)
0.136
437
0.305
214
Desembocadura del Rin (Budny, 1984)
0.278
162
Desembocadura del Rin (Ibs-von Seht
and Wohlenberg, 1999)
0.280
148.8
Área de Colonia (Parolai et al., 2002 )
0.37
115
Valle del río Segura (Delgado et al.,
2000a)
0.204
122.3
Área de Florencia (D’Amico et al., 2008)
z < 20m
z > 20m
138
318
0.43
0.15
raíz cuadrada del esfuerzo efectivo σ c , dependiendo también de otros parámetros geotécnicos
(densidad de masa de las partículas, grado de saturación, fracción vacía, índice de plasticidad y
factor de sobreconsolidación). Por tanto, VS es proporcional a z 0.25 sólo si estos parámetros
geotécnicos permanecen constantes dentro de la capa sedimentaria (ver, por ejemplo, Schneider
et al., 1999). Los trabajos listados en la Tabla 5.1.1 muestran valores mayores de 0.25 excepto en
el caso del valle del río Segura ( x = 0.204 o B = 1.256), en el que se consideraron sedimentos
relativamente superficiales (hasta 45.7 m de profundidad máxima) y suelos mayoritariamente
más blandos. Valores superiores de x , en concreto 0.28 y 0.37 ( B = 1.388 y 1.587,
respectivamente) se han encontrado en cuencas con cubiertas sedimentarias más profundas, que
incluyen materiales cementados y rocas sedimentarias blandas caracterizadas por una mayor
rigidez (ver, por ejemplo, Kramer, 1996). Exponentes del orden de 0.448 ( B = 1.812) se han
obtenido para el basamento en el área de Colonia entre los 20 y los 377 m (Parolai et al., 2002).
Por lo tanto, el valor de 0.305 que hemos obtenido para x , considerando que el microtremor
está compuesto por ondas superficiales, está dentro del rango esperable para una cuenca
sedimentaria como la de Zafarraya.
- 187 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
A partir del ajuste mostrado en la ecuación (5.1.7) y del conjunto de periodos predominantes
medidos, se ha podido realizar el mapa de profundidades al basamento (isobatas), que se muestra
en la Fig. 5.1.8. La característica más notable es el incremento de la profundidad hacia la parte
central del borde sur (ver también cortes a lo largo de las columnas C, F, I y L en la Fig. 5.1.9).
Esa depresión en la roca caliza parece extenderse hacia el este a lo largo del lecho del río La
Madre. El espesor de los sedimentos disminuye más rápidamente hacia el sur y hacia el oeste y
más gradualmente hacia el norte y hacia el este. En el sector suroeste, en las proximidades del
borde sur de la cuenca (puntos D2, E2, F2), encontramos profundidades inferiores a 50 m, que
parecen estar subestimadas en comparación con las determinadas por Morales et al. (1991) o
López-Chicano (1992), quienes dan profundidades hasta el basamento resistivo que alcanzan los
90 m y mayores que 100 m respectivamente. El pico principal del HVSR muestra amplitudes
bajas (en torno a 2) en esa zona de la cuenca, sugiriendo un pobre contraste de impedancia entre
los sedimentos y el basamento. De acuerdo con esto, la presencia de materiales sedimentarios
con velocidad de onda S anormalmente alta, podría motivar la subestimación de su profundidad.
Figura 5.1.8. Espesor estimado de la cobertura sedimentaria en la cuenca de Zafarraya interpolado para toda el
área de estudio. El modelo de velocidad de onda S depende solamente de la profundidad y está dado, para los
sedimentos, por la ecuación (5.1.7), que ha sido extrapolada aquí hasta los 200 m.
Los posibles efectos de las heterogeneidades laterales en el cociente espectral han sido
descartados calculando separadamente los HVSR para las componentes horizontales N-S y E-W
en los puntos de la malla próximos al borde sur, no encontrándose ninguna diferencia relevante.
El incremento de la profundidad de la cuenca encontrado en el área noroeste, al norte de los
afloramientos (punto E6) y en el borde norte, cerca del sumidero principal (C7, C8 y D8)
concuerda con los resultados de López-Chicano (1992), aunque no es coherente con las
profundidades mostradas por Morales et al. (1991).
- 188 -
Aplicaciones.
Figura 5.1.9. Perfiles de la cuenca de Zafarraya
Figura 5.1.10. Situaciones estimadas de algunos perfiles
correspondientes a las columnas C, F, I y L de la Fig.
2D de la cuenca de Zafarraya en la representación de
5.1.8. en los que se muestra el relieve y la profundidad
Bard and Bouchon (1985). Los asteriscos representan
estimada de los sedimentos hasta el basamento calizo.
los perfiles L (superiores) e I (inferiores) para dos
La velocidad de onda S estimada se muestra en escala
evaluaciones distintas del contraste de velocidades.
de grises.
En este trabajo se ha interpretado que todas las resonancias encontradas, incluso a frecuencias
bajas, son debidas a efectos 1D. Esto es admisible dada la baja relación de forma equivalente
que presenta la cuenca, ya observable en las estructuras de López-Chicano (1992) y Morales et
al. (1991). Siguiendo a Bard and Bouchon (1985), la posibilidad de que se desarrollen
resonancias globales 2D depende de la forma de la cuenca y del contraste de velocidades entre
los sedimentos y el basamento. Un perfil profundo y estrecho y/o un contraste alto abrirían esta
posibilidad. La cuenca de Zafarraya no reúne estas condiciones. En la Fig. 5.1.10 se muestran
distintas estimaciones de la relación de forma equivalente (la profundidad máxima dividida por
la anchura a la mitad de la profundidad máxima) frente al contraste de velocidades para varios
perfiles N-S. El contraste se ha evaluado en base a la velocidad media en la capa sedimentaria
hasta la profundidad máxima o hasta la mitad de esta profundidad. En cualquier caso, estamos en
- 189 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
la región en dominada por efectos 1D y propagación lateral de ondas superficiales (Bard and
Bouchon, 1985).
5.2. APLICACIONES EN ENTORNOS URBANOS: EL CASO DE MULA (MURCIA)
En este segundo caso, se pretendió estudiar la geometría del basamento y de los materiales
sedimentarios en la localidad de Mula (Murcia, SE de España), utilizando medidas de ruido
sísmico, mediante la aplicación simultánea de los métodos v-SPAC y HVSR. En el SE español
han ocurrido algunos terremotos destructivos, tales como el terremoto de Torrevieja de 1829 de
magnitud 5.5 en la escala Richter, según el Instituto Andaluz de Geofísica, que alcanzó una
intensidad epicentral de IX (escala EMS, 1998). En los últimos años, tres eventos con
magnitudes en torno a cinco han tenido lugar en las proximidades de la localidad de Mula. El
primero, denominado terremoto de Mula (Mw = 5.1), ocurrió el 2 de febrero de 1999 con
epicentro 5 km al Norte de la localidad e intensidad máxima VI-VII; el segundo (Mw = 4.6) tuvo
lugar el 6 de agosto de 2002 a 30 km al oeste de Mula, cerca de la localidad de Bullas; mientras
que el tercero ocurrió el 29 de enero de 2005 (Mw = 4.8) a 41 km al oeste, cerca de Zarcilla de
Ramos. Otros eventos relativamente próximos con intensidades máximas de IX o mayores se
produjeron en 1579, 1678 y dos en 1911 (Buforn et al. 2005).
Algunos estudios preliminares (Navarro et al., 2000; Navarro et al., 2006) muestran que los
edificios de hormigón armado con 4 y 5 plantas situados en la zona centro-oeste de Mula
sufrieron daños comparativamente más serios que los situados en otras partes de la ciudad
durante el terremoto de Mula de 1999. Una posible explicación de este hecho sería la existencia
de efectos de sitio y de resonancia entre el suelo y las estructuras. Estos motivos, junto al rápido
crecimiento urbano de la localidad, motivaron este estudio, que podría ser útil para futuras
predicciones de daños (publicación: García-Jerez et al., 2007).
5.2.1. ENTORNO GEOLÓGICO
La región bajo estudio está situada en la parte este de la cordillera Bética, que clásicamente se
divide en dos dominios principales: las zonas Internas y las Externas (Figura 5.2.1). A su vez, las
Zonas Internas se pueden dividir en tres complejos tectónicos: el Complejo Nevado-Filábride,
formado por rocas metamórficas con grado de metamorfismo de medio a alto, y que no aflora en
las proximidades de la localidad de Mula; el Complejo Alpujárride, que se superpone al NevadoFilábride y que consiste en rocas con grado de metamorfismo de bajo a medio; y el Complejo
Maláguide, el más superficial, compuesto de rocas que generalmente no presentan metamorfismo
- 190 -
Aplicaciones.
(Egeler and Simon, 1969; Sanz de Galdeano et al., 1995). La Zona Externa (dominios Prebético
y Subbético) está compuesta de rocas mesozoicas y terciarias y representa el margen continental
de la placa Ibérica (García-Hernández et al., 1980). En la parte oriental de la Cordillera Bética, la
frontera entre las zonas Interna y Externa coincide prácticamente con la traza del accidente
Cádiz-Alicante (Sanz de Galdeano et al., 1995), que es una falla transcurrente con dirección
N60-70E (Figs. 5.2.1 y 5.2.2a).
Figura 5.2.1. Mapa geológico general de la Cordillera Bética, el Rif y el mar de Alborán. Tomado de López Casado
et al. (2001).
La ciudad de Mula está situada en las proximidades de la divergencia entre la frontera entre
zonas Interna-Externa y la falla de Cádiz-Alicante, al norte de Sierra Espuña, en el Complejo
Maláguide (Fig. 5.2.2a). La depresión de Mula-Pliego, que aparece al sur de Mula, constituye
una gran estructura sinclinal ocupada por margas del Oligoceno Superior al Mioceno Inferior y
arenas rojizas (Formación del Río Pliego, Martín-Martín et al., 1996, Fig. 5.2.2b). Al norte de la
- 191 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
localidad de Mula aparecen calizas del Paleoceno y calizas y margas del Eoceno Inferior y
Medio (Formación de Mula, Martín-Martín et al., 1996), que constituyen una estructura
anticlinal con vergencia NE-SW (Paquet, 1969 ; Fig. 5.2.2c). Los materiales del Paleogeno y
Mioceno Inferior constituyen los basamentos locales con grados diferentes de dureza,
compactación y resistencia, que están cubiertos por rellenos sedimentarios Plio-Cuaternarios
formando una pequeña cuenca sedimentaria (Fig. 5.2.2c).
Figura 5.2.2. (a) Síntesis de la geología regional, tomada de Paquet (1969). (b, c) Esquemas geográficos y
geológicos de Mula, mejorados por Alcalá et al. (2004). Leyenda de los materiales geológicos pre-orogénicos
(basamento): 1: Calizas y margas (Paleoceno); 2: Calizas orgánicas y calcarenitas (Eoceno); 3: Margas y arenas
(Eoceno); 4: Arcillas, margas y arenas (Oligoceno Superior – Mioceno Inferior); 5: Conglomerados (Oligoceno
Superior – Mioceno Inferior). Leyenda de materiales geológicos post-orogénicos (rellenos sedimentarios): 6:
Margas y arenas (Plioceno); 7: Coluviales: gravas y arcillas (Pleistoceno); 8: Terrazas fluviales: arenas y limos
(Pleistoceno); 9: limos arcillosos (Holoceno); 10: Tierra de labor (Holoceno); 11: Rellenos urbanos (Holoceno). (A),
(B), (C), (D) y (E) son las unidades lito-estratigráficas plio-cuaternarias definidas en Mula (ver texto). Leyenda de
símbolos geológicos: 12: contacto geológico indiferenciado; 13: Fallas. Leyenda de localización geográfica: 14:
Límite de la ciudad de Mula; 15: Carreteras principales: Leyenda de datos sísmicos y geotécnicos: 16: Sondeos
(perforaciones); 17: Perfiles sísmicos (array); 18: Secciones geológicas. Los sondeos geológicos han sido
etiquetados de G1 a G5; 19: Secciones sísmicas. Las posiciones de las arrays han sido etiquetadas de A1 a A5.
- 192 -
Aplicaciones.
El registro sedimentario Plio-Cuaternario en esta localidad se ha dividido (Alcalá et al., 2004) en
5 unidades lito-estratigráficas (Fig. 5.2.2c). La Unidad A incluye arcillas y margas del Plioceno,
mientras que las Unidades B y C consisten en dos terrazas fluviales del Pleistoceno medio y
tardío. Ambas unidades están compuestas de limos arcillosos, gravas dispersas y arenas al fondo
(Silva et al., 1996). La Unidad D está compuesta de limos arcillosos, gravas dispersas y arenas
del Pleistoceno tardío (Silva et al., 1996). La Unidad E es de edad holocena e incluye gravas
coluviales con matriz arcillosa, rellenos antrópicos y tierras de cultivo.
La clasificación presentada de la geología superficial de Mula (Fig. 5.2.2c) se ha basado en su
cartografía geológica a partir del reconocimiento in-situ y en las características geotécnicas de
los diferentes tipos de suelos descritos, obtenidas de 10 sondeos mecánicos realizados en cinco
ubicaciones diferentes. También se muestran (Fig. 5.2.8) dos secciones con la interpretación
geológica entre los sondeos geotécnicos G1-G3 y G1-G5 (García-Jerez et al., 2007).
5.2.2. ANÁLISIS DE LOS REGISTROS DE RUIDO AMBIENTAL. CÁLCULO DE CURVAS
DE DISPERSIÓN DE ONDA RAYLEIGH MEDIANTE v-SPAC.
Durante septiembre de 2005 se realizaron medidas ruido ambiental en 5 emplazamientos de la
localidad de Mula con el objetivo de determinar sus perfiles de velocidad de onda S y mejorar la
cobertura de los datos geotécnicos. Las medidas fueron llevadas a cabo en cinco espacios
abiertos, cuyas ubicaciones aparecen en la Fig. 5.2.2c y en la Tabla 5.2.1 Las arrays utilizadas
eran de tipo circular, compuestas por cinco sensores de alta sensibilidad VSE-15D
equiespaciados rodeando un sexto sensor central de iguales características. Los radios variaron
entre los 7.5 m y los 30 m, tomándose varios de ellos (normalmente tres) en cada sitio. El tiempo
de grabación fue de 30 minutos por radio y se utilizó una frecuencia de muestro de 100 m.p.s.
Tabla 5.2.1: Situación de las arrays sísmicas desplegadas en la población de Mula.
Radios
Coordenadas
(m)
UTM
A1
7.5, 15
631831 4211716
Instituto Ribera de los Molinos, zona NW, cerca de afloramientos.
A2
7.5, 15
632091 4211231
Patio de colegio de primaria Santa Clara.
A3
7.5, 15, 30
632578 4211217
Parque “Cristóbal Gabarrón Butacón”, en la parte centro-sur.
A4
7.5, 15, 30
663408 4211849
Campo de fútbol Municipal.
A5
7.5, 15, 30
631991 4210234
Cementerio, cerca de afloramientos de margas.
Código
Descripción
- 193 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Algunas
otras
características
de
este
dispositivo se han descrito ya en la sección
5.1.3. El análisis de los registros de ruido se
realizó mediante el método v-SPAC. El
coeficiente de v-SPAC V fue calculado
para un conjunto de intervalos temporales y
representado en función del tiempo, como se
muestra en la Fig. 5.2.3b. La ventana
temporal usada fue de 20s con solapamiento
Figura 5.2.3. Ejemplo de cálculo del coeficiente de
del 80%. Se comprobó la estabilidad de V
correlación para la array A2. (a) Los registros de
entre las distintas ventanas temporales,
microtremores grabados por el sensor central. (b)
descartando aquellas con valores anómalos.
Diagrama, dependiente del tiempo, de la parte real del
La fase de V se muestra en la Fig. 5.2.3c.
coeficiente de correlación. (c) Diagrama, dependiente
Su valor teórico es 0 ó para una array
del tiempo, del coseno de la fase del coeficiente de
correlación. (d) Promedio temporal de la parte real del
continua, de modo que valores diferentes
coeficiente de correlación (línea continua) y desviación
pueden
estándar (línea discontinua). (e) Gráfico equivalente a
multiplicidad de modos propagándose a la
(d) para la fase del coeficiente de correlación. Con línea
revelar
problemas
como
la
misma frecuencia con distintas velocidades,
continua se muestra el arco coseno de la media de los
cosenos de las fases de V calculadas en las distintas
ventanas.
frentes de onda curvos debidos a fuentes
cercanas, atenuación a lo largo de la array o
variación local de la geología bajo ésta, o un
muestro acimutal insuficiente, etc. (ver p. e. Asten, 2006; Margaryan et al., 2009; Okada, 2006;
Henstridge, 1979 y la descripción de los efectos de N finito en la Sección 3.3.3). A continuación,
la parte real del coeficiente de v-SPAC fue promediada en las ventanas de buena calidad (Fig.
5.2.3d). Se observó una correlación muy pobre en todas las arrays para frecuencias por debajo de
un cierto umbral (de varios Hz) a pesar de que la respuesta instrumental es apropiada a partir de
0.25 Hz. Este umbral se sitúa alrededor de los 5-6 Hz para el punto A2, como se muestra en la
Fig. 5.2.3, yendo este deterioro acompañado de un comportamiento ruidoso en la fase de V
(incremento en la desviación típica), más notable por debajo de 2.5Hz (valor medio distinto de
cero). La causa probablemente está en la pobre relación señal/ruido debida a los efectos de
filtrado paso-alta en las fronteras con los sedimentos. Estos efectos han sido encontrados y
discutidos por varios autores (ver p. e. Scherbaum et al., 2003; Roberts and Asten, 2007). La
velocidad de fase de onda Rayleigh se calculó resolviendo, para cada frecuencia, la ecuación
- 194 -
Aplicaciones.
(3.3.1). Para ello, se seleccionaron visualmente, para cada radio, los rangos de frecuencia en los
que la curva de correlación tiene buen comportamiento (García-Jerez et al., 2007). Las curvas de
dispersión obtenidas para las cinco arrays (Fig. 5.2.4) muestran diferencias significativas
reveladoras de las distintas condiciones geológicas de sus emplazamientos. En el sitio A1 se
recuperó una curva de dispersión “corta”, en frecuencias entre 14 Hz y 18 Hz, usando radios de
7.5 m y 15 m. La velocidad de fase obtenida allí decrece con la frecuencia desde unos 1000 m/s a
los 500 m/s. Para el sitio A2 se obtuvo una curva de dispersión entre 8 y 17 Hz con velocidades
entre 336 m/s y 670 m/s. La curva para el sitio A3 muestra, en general, las menores velocidades
de onda Rayleigh: en torno a 800 m/s a 6 Hz y bajando hasta los 190 m/s a partir de 13 Hz, lo
que revela que los materiales más superficiales son bastante blandos. Los sitios A4 y A5 siguen
una tendencia intermedia entre A1 y A2 o A3. Las velocidades máximas son 860 y 1040 m/s
respectivamente en torno a 9 Hz, mientras que toman valores de 320 m/s y 480 m/s para 18 Hz.
Figura 5.2.4. Curvas de dispersión calculadas a partir de los registros de las arrays A1 a A5.
5.2.3. ANÁLISIS DE LOS REGISTROS DE RUIDO AMBIENTAL. HVSR Y PERIODOS
PREDOMINANTES.
Tras el terremoto de Mula de 1999, se realizaron, en esta localidad, medidas individuales de
ruido ambiental en tres componentes. Posteriormente, en marzo de 2004, completamos el
conjunto de datos hasta cubrir toda la población con medidas, aproximadamente, en los nodos de
una malla cuadrada de 100 m x 100 m, además de otras medidas adicionales cerca de los
- 195 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
edificios dañados en el citado terremoto y en los centros de las arrays sísmicas descritas antes. La
mayoría de los registros fueron obtenidos de día, evitando en lo posible el tráfico y otras fuentes
cercanas de ruido. En el área central de la ciudad se realizaron medidas nocturnas. El tiempo de
observación fue 180 s y los detalles del procesado fueron análogos a los de Zafarraya
(Almendros et al., 2004; García-Jerez et al., 2006a), incluyendo el empleo de representaciones
dependientes del tiempo (ratiogramas) para el control de la estabilidad.
Figura 5.2.5. Cocientes espectrales H/V obtenidos en los puntos de array.
Los sensores utilizados en estas medidas puntuales fueron del mismo tipo que los utilizados en
las medidas de array. Como ejemplo, en la Fig. 5.2.5 se muestran los cocientes espectrales
correspondientes a los sitios de array. Con estos resultados se elaboró el mapa de distribución de
periodos predominantes de la Fig. 5.2.6. Los periodos predominantes más bajos - entre 0.06 y
0.13 s - corresponden a las zonas norte y este de la ciudad, donde el espesor de los sedimentos es
menor. Las zonas central y sur de la localidad presentan valores mayores del periodo, entre 0.15
and 0.38 s, distribuidos heterogéneamente.
5.2.4. INVERSIÓN DE PERFILES DE VELOCIDAD DE ONDA S A PARTIR DE HVSR Y
CURVAS DE DISPERSIÓN DE ONDA RAYLEIGH
Se invirtieron cinco perfiles de velocidad de onda S en los puntos A1-A5 a partir de las curvas de
dispersión obtenidas mediante v-SPAC y de las formas de los cocientes espectrales HVSR
medidos en los centros de las arrays. Éste método de inversión conjunta, desarrollado por Arai
and Tokimatsu (2005), presenta mejoras significativas en comparación con la inversión
- 196 -
Aplicaciones.
tradicional de la curva de dispersión Rayleigh, permitiendo obtener modelos de tierra en los que
la profundidad al basamento y la estructura de los sedimentos está mejor determinada.
Figura 5.2.6. Distribución de periodos predominantes (en segundos) en la localidad de Mula.
Con tal propósito definimos la función costo del modelo m ( misfit (m) en ecuación 5.2.1) como
la suma, para el conjunto de periodos, de las diferencias cuadráticas entre las velocidades de fase
medidas y calculadas (y equivalentemente para los HVSR). Los modelos m permitidos son 1D,
compuestos por un número fijo de capas elásticas homogéneas sobre un semiespacio. Cada
sumando en (5.2.1) está pesado por la inversa de la varianza de los datos a la frecuencia
correspondiente. El parámetro pc permite controlar el peso relativo de la curva de dispersión y
del cociente espectral (pHVSR = 1- pc). Seguidamente, se empleó un algoritmo iterativo (Nelder
and Mead, 1965) para minimizar misfit (m) .
misfit (m) 2 p
n
c
i 1
c
exp
(T i) cTeo (T i, m)
variance cexp (T i)
2
2 p
n
HVSR
i 1
HVSR
exp
(T i) HVSRTeo (T i, m)
variance HVSRexp (T i)
2
(5.2.1)
Durante el proceso de inversión, se admiten variaciones independientes de la velocidad de onda
- 197 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
S y del espesor de las capas. Las densidades fueron fijadas a 2.0·103 kg/m3 y las velocidades de
ondas P calculadas a partir de las VS considerando un coeficiente de Poisson de 0.33. La
elipticidad del modo fundamental Rayleigh fue usada como cálculo directo de HVSRTeo (T i, m)
(Fäh et al., 2003; Haskell, 1953), truncando las divergencias de esta función a partir del valor
máximo del HVSR experimental. Para construir los modelos iniciales, se promedió la
información geotécnica disponible, estimando los valores de V S para cada unidad geológica
Plio-Cuaternaria a partir del valor N-SPT medio (García Jerez et al., 2007) mediante las
relaciones empíricas de Imai (1981) y Kokusho (1987). Los modelos iniciales se han listado en
la Tabla 5.2.2. El modelo para A1 difiere notablemente de los demás, porque el espesor estimado
de los materiales sedimentarios fue mucho menor.
Tabla 5.2.2. Modelos iniciales usados para la inversión de perfiles de velocidad de onda S en los putos A1 a A5.
A2 – A3
A1
Nº de
capa
1
2
3
4
5
6
Espesor
(m)
2
3
5
∞
VS
(m/s)
242.5
342.5
500.0
1000.0
Espesor
(m)
2
3
5
5
5
∞
VS
(m/s)
160.0
242.5
242.5
342.5
342.5
1000.0
A4
Espesor
(m)
2
3
5
5
5
∞
A5
VS
(m/s)
160.0
242.5
242.5
342.5
342.5
800.0
Espesor
(m)
VS (m/s)
2
3
5
5
5
∞
240.0
363.8
363.8
513.8
513.8
1500.0
En la figura 5.2.7 se muestra el resultado de la inversión correspondiente a la array A5. Los
modelos resultantes para las cinco arrays y la información geotécnica previa se han empleado
para trazar dos cortes geológicos a lo largo de la localidad, que se muestran en la Fig. 5.2.8.
5.2.5. DISCUSIÓN.
La estructura geológica superficial en la ciudad de Mula consiste en un relleno Pliocuaternario
no consolidado, cuyo espesor se incrementa desde los límites norte y sur de la ciudad, en los que
el basamento aflora, hacia las zonas central y oeste (Figs. 5.2.2c y 5.2.8), en las que el espesor
máximo de estos sedimentos ronda los 16-18 m. A efectos de explicación de las frecuencias de
resonancia, se encuentran dos tipos diferentes de materiales actuando como “basamento”. El
primero estaría constituido por las calizas y margas del Paleogeno que afloran al norte, mientras
que el “basamento” mapeado por el HVSR en la parte sur consistiría en margas del Mioceno
inferior. Los modelos invertidos muestran que estas rocas carbonatadas presentan velocidades de
onda S de entre 1000 y 1600 m/s, mientras que V S va de 500 a 650 m/s para las margas.
- 198 -
Aplicaciones.
Figura 5.2.7. Ejemplo de inversión del perfil de velocidad de onda S a partir de las medidas de SPAC y HVSR en el
punto A5. (a) Curvas de dispersión experimental (línea punteada) y calculada (línea contínua) para ondas Rayleigh.
(b) HVSR experimental (línea punteada) y calculado (línea contínua) como la elipticidad del modo fundamental Rg.
(c) Modelo inicial (en gris) e invertido (en negro). Las líneas discontínuas indican una desviación estándar.
Las cinco unidades sedimentarias Pliocuaternarias se pueden agrupar en tres unidades
geotécnicas principales, atendiendo a sus comportamientos mecánico y sísmico. La primera
(superior) unidad geotécnica está formada por la unidad sedimentaria E (Fig. 5.2.8). Es la más
superficial y presenta velocidades V S inferiores a 150 m/s y espesores menores de 2 m. Está
discontinuamente distribuida en el área de estudio. En las unidades geotécnicas segunda (media)
y tercera (inferior) agrupamos las unidades sedimentarias C y D, y las A y B respectivamente.
Las medidas de array proporcionan valores de V S entre 250 y 400 m/s para la media y de 340
m/s a 500 m/s para la inferior, mientras que los sondeos geotécnicos las sitúan en torno a 160
m/s, 260 m/s y 350 m/s para las unidades superior, media e inferior respectivamente (Tabla
5.2.3). Los perfiles de VS muestran estructuras más blandas en los sitios A2 y A3 (por debajo de
400 m/s hasta 10 m) y más rígidas para A4 y A5, alcanzando 600 m/s a 7-8 m debido a la
presencia de materiales margosos. El punto A1, situado cerca de los afloramientos del norte,
presenta 4 m de rellenos sedimentarios con V S < 400 m/s sobre una capa margosa con V S en
torno a 643 m/s y un basamento carbonatado más rígido con V S = 1160 m/s (Fig. 5.2.8).
- 199 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Tabla 5.2.3. Valores de N-SPT, densidad real (γ) en kg/m3 y velocidad de onda S ( VS en m/s) obtenida de las
relaciones de Imai (1981) y Kokusho (1987) para cada unidad sedimentaria superficial en función del valor N-SPT.
Valor N- SPT
Vs (Imai,
Vs (Kokusho,
3
3
γ (x 10 kg/m )
(nº golpes)
1981) m/s
1987) m/s
Unidad Nº sond.a
n
X
n
X
N
X
X
X
σ
Σ
σ
σ
σ
A
2
1 10
4 49.3 1.3
1
2.22
318
110
367
109
B
7
6 2.5 1.1 6 12.8 10.9 2
2.08 0.01
241
230
234
222
C
6
6 1.5 0.5 6 19.7 13.7 2
1.96 0.22
254
226
216
192
D
10
10 5.8 3.8 21 16.0 8.9 15 1.93 0.13
258
217
252
207
E
4
7 0.5 0.2
8b
4b
1.65b 0.50b
160
128
160
127
n = número de datos, X = valor medio, σ = desviación estándar.
a
Datos de 10 sondeos mecánicos situados en 5 sitios.
b
Valor de N-SPT y densidad real (tomado de Alcalá-García et al., 2002) para materiales similares en Adra
(Almería).
Espesor (m)
El punto A2 es cercano al sondeo geotécnico G2 (Fig. 5.2.2c), lo que permite la comparación
directa entre los datos geotécnicos y los basados en el v-SPAC (ambos en Fig. 5.2.8). Los dos
sondeos muestran que el basamento aparece alrededor de los 15 m de profundidad. Su velocidad,
estimada con las medidas de array, es de V S = 1040 m/s. Este valor estaría asociado al
basamento carbonatado. El perfil de velocidades V S indica la ausencia de materiales margosos.
La unidad geotécnica superior aparece en este punto con un valor bajo de V S (140 m/sec). Las
unidades geotécnicas media e inferior muestran velocidades de onda S inferiores a 400 m/s y
ocasionalmente mayores de 400 m/s, respectivamente. El punto A3 presenta características
similares al A2, con el basamento carbonatado ( V S ~ 1600 m/sec) a unos 17 m. Los puntos A4 y
A5 presentan diferencias significativas respecto a los dos anteriores, por la posible presencia de
materiales margosos con espesores estimados en 9 y 11 m y velocidades desde 550 hasta 625 m/s
sobre el basamento carbonatado. Ambos puntos presentan también algunos rellenos superficiales
blandos. Las tres unidades geotécnicas principales fueron detectadas en el punto A4, mientras
que sólo las dos más profundas aparecieron en A5.
A la vista de estos resultados, concluimos que los perfiles geotécnicos y la información geológica
de la ciudad de Mula son, en general, mutuamente consistentes con los datos obtenidos a partir
de ruido ambiental. Sin embargo, la comparación entre los sondeos A2 y G2 sugiere que la
concordancia en la profundidad de las fronteras sedimentarias es mejor que la existente entre los
valores de VS . En el caso geotécnico, estos valores fueron obtenidos a partir del N-SPT mediante
las relaciones de Imai (1981) y Kokusho (1987), pareciendo estar algo subestimados
principalmente para las unidades geotécnicas más profundas.
- 200 -
Aplicaciones.
Figura 5.2.8. (a) Sección sísmica a lo largo de la línea A1-A2-A5 interpretada a partir de los datos geológicos y
geotécnicos, de los modelos de velocidad de onda S-wave obtenidos mediante array sísmica y de los periodos
predominantes. (b) Sección A2-A3-A4. Las localizaciones de las arrays se muestran en la Fig. 5.2.2c. Velocidades
en m/s.
La importante dispersión en los valores de V S obtenidos del SPT para todas las unidades
sedimentarias debe considerarse en la comparación. Estos valores están afectados, además de por
la variabilidad en el valor de N, por posibles errores en la identificación de la litología y por la
- 201 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
dificultad de interpretación de los rechazos en el método SPT. Aún así, esta concordancia en
velocidades puede mejorarse si se utilizar relaciones entre N-SPT y VS que tengan en cuenta los
incrementos en la presión confinante (creciente con la profundidad)
5.3. OBSERVACIÓN DE ONDAS RAYLEIGH Y LOVE EN LA DESEMBOCADURA DEL
RIO ANDARAX (ALMERÍA).
5.3.1. INTRODUCCIÓN
En esta sección, se investiga experimentalmente la capacidad de varias variantes del método
SPAC para la determinación de las propiedades elásticas de los depósitos sedimentarios
superficiales en dos sitios de test próximos de cuya estructura se tiene información previa. Se
utilizarán, además del método v-SPAC, los métodos DR y SCA de análisis de registros de tres
componentes expuestos en capítulos anteriores, lo que permitirá la obtención de curvas de
dispersión para ondas Rayleigh y Love. En concreto, el método DR fue utilizado en el Campus
de la Universidad de Almería con arrays dobles cuadradas y pentagonales, mientras que el
método SCA ha sido testado en el delta del río Andarax usando arrays pentagonales simples. En
ambos puntos se obtendrá un modelo de suelo unidimensional perfectamente compatible con los
datos previos. En el segundo emplazamiento haremos también una comparación con la
información previa en términos de velocidades de fase de onda Love y se tratará de aprovechar
al máximo las capacidades del método SCA considerando correcciones por número de estaciones
finito y por ruido incoherente. En este último ejercicio se mostrará también el uso del código de
inversión desarrollado en el Capítulo 4 (posteriores aplicaciones a la inversión de datos de ruido
sísmico en la isla de Decepción podrán encontrarse en Luzón et al., 2010).
5.3.2. CONTEXTO GEOLÓGICO, INSTRUMENTACIÓN Y ADQUISICIÓN DE DATOS.
Los dos emplazamientos en que se realizaron las pruebas están situados en espacios abiertos:
dentro del campus de la Universidad de Almería (sitio “Universidad”) y en la desembocadura del
Río Andarax (sitio “Desaladora”) respectivamente. Las posiciones exactas están indicadas en la
figura 5.3.1. En esta zona se han realizado varios estudios geofísicos de cierta envergadura.
Destacan un conjunto de sondeos eléctricos verticales ejecutados por el IGME-IRYDA (1977),
algunos de los cuales son mostrados en la Fig. 5.3.2, y varias decenas de sondeos mecánicos
cercanos, los más recientes destinados a la construcción de una planta desaladora, que llegan a
profundidades superiores a 100m. Un interpretación de parte de estos sondeos mecánicos ha sido
realizada por Pulido-Bosch et al. (2004). También existen estudios sísmicos a mayor escala
(Navarro et al., 1997) que pueden complementar a los anteriores especialmente en lo que se
- 202 -
Aplicaciones.
refiere a las propiedades del basamento.
Figura 5.3.1. Situación de los sitios de test, en el Campus de la Universidad de Almería y en la desembocadura del
río Andarax. Se indica la situación de tres sondeos cercanos: P-III de 120m de profundidad, S-5A de 117m y S-6A
de 60m.
- 203 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 5.3.2. Perfiles eléctricos interpretados en el delta del río Andarax realizados por el IGME-IRYDA (1977). El
extremo oriental del perfil I está situado unos 5 km aguas arriba del sitio Desaladora.
Emplazamiento Desaladora
En la estratigrafía de esta área aparecen, hasta
unos 20-25m, depósitos aluviales holocenos
consistentes en limos, arenas y algunas gravas.
Bajo estos aparece un paquete de gravas
gruesas y arenas. Los materiales del Plioceno
aparecen en torno a los 60m de profundidad,
como estratos alternantes de lutitas y areniscas,
con
intercalaciones
de
gravas
y
arenas
pliocenas y finalmente, un grueso estrato de
Figura 5.3.3. Síntesis de los materiales perforados en
margas del Mioceno. Las rocas triásicas
el delta del río Andarax, según Pulido-Bosch et al.
(dolomitas y filitas) aparecen a profundidades
(2004).
no completamente determinadas que previsiblemente deben superar los 400-450m a que ya se
encuentran unos 5km río arriba, según el perfil II en su extremo oriental (Fig. 5.3.2).
Emplazamiento Universidad
Este emplazamiento se encuentra situado también en el abanico aluvial del río Andarax, a 2km
- 204 -
Aplicaciones.
en dirección NE del sitio Desaladora. En esta zona no hay sondeos relativamente profundos, pero
sí se dispone de varios sondeos mecánicos superficiales destinados a la construcción de distintos
edificios del Campus de la Universidad de Almería y de un sondeo de refracción de ondas S de
alcance también muy superficial (~10m).
Instrumentación y adquisición de datos. Sitio Desaladora.
En el experimento en el sitio Desaladora, se desplegaron cinco arrays pentagonales, sin estación
central, con radios de 12, 18, 25, 50 y 94m. La array de 50m, estaba formada por cinco
sismómetros triaxiales de banda ancha del modelo CMG-3ESPD con buena respuesta entre 120s
y 50Hz. En el resto de las arrays se combinaron cuatro sismómetros CMG-6TD, con respuesta
entre 30s y 100Hz y un sismómetro CMG-3ESPD. Ambos modelos son manufacturados por
Guralp y están sincronizados mediante GPS independiente. Los sensores fueron depositados
sobre plataformas niveladas, situadas directamente sobre el suelo. No se usó aislamiento térmico
para los sensores 3ESPD, tan sólo se evitó su exposición directa al sol. Los sensores 6-TD fueron
protegidos con un aislante térmico textil.
Los tiempos de grabación oscilaron entre 1hora y 1,5 horas. A excepción de la medida de 50m
(realizada nueve meses antes que las demás), el resto fueron programadas para días con poco
viento según la previsión meteorológica. Algunos detalles sobre las medidas pueden encontrarse
en la Tabla 5.3.1. Además, con objeto de mejorar la resolución a mayor profundidad, se realizó
una medida con una array triangular con estación central de 420m de radio para ser analizada
con el método v-SPAC.
Tabla 5.3.1. Coordenadas de los centros de las arrays desplegadas en el sitio desaladora y condiciones
meteorológicas (en las arrays sin estación central: promedio de las coordenadas de los vértices). Todas son
pentagonales sin estación central excepto la de radio 420m que es triangular con estación central.
Radio (m)
12
18
25
50
94
420
Fecha
15/06/2009
15/06/2009
11/06/2009
26/09/2008
15/06/2009
19/06/2009
36º 49.0885’N
36º 49.0885’N
36º 49.0338’N
36º 49.0925’N
36º 49.0890’N
36º 49.2764’N
Centro
2º 25.6084’W
2º 25.6084’W
2º 25.6025’W
2º 25.6028’W
2º 25.6094’W
2º 25.4610’W
Alt: 12m
Alt: 12m
Alt: 11m
Alt: 12m
Alt: 15m
Alt: 10m
Observaciones
Sin viento
Sin viento
Viento débil
Viento débil-moderado
Sin viento
Viento débil
Instrumentación y adquisición de datos. Sitio Universidad de Almería.
En el campus de la Universidad de Almería se realizaron también varios montajes destinados a
explorar la estructura sedimentaria más superficial mediante, en este caso, el método v-SPAC y
- 205 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
el método del doble anillo (DR). Se desplegaron arrays dobles regulares, con estación central,
formadas por cuatro o cinco sismómetros por círculo, uniformemente distribuidos. Se utilizaron
acelerómetros ETNA (fabricados por KINEMETRICS). En la Tabla 5.3.2, se detallan las
configuraciones empleadas en este experimento. La medida 1 fue realizada en un punto distinto
del Campus. A unos 250m al este del centro de las arrays hay un sismómetro de banda ancha
GURALP-CMG-3ESPCD instalado de forma permanentemente y en registro continuo a 100
m.p.s. cuyos datos serán tenidos en cuenta en la discusión del HVSR.
Tabla 5.3.2. Configuraciones empleadas en los tests del sitio Universidad.
N. Experimento
Radios
N. sensores
Observaciones
1
15m y 30m
5+5
Sobre suelo no pavimentado. Algún tránsito de
camiones en las proximidades.
2
24.75m y 35m
4+4
3
17.5m y 35m
4+4
Sobre suelo pavimentado. Ausencia de fuentes
cercanas.
Idem.
En lo posible, se evitó el tránsito de personas y vehículos en las inmediaciones de la array y en
su interior, ya que ponen en riesgo el cumplimiento de las hipótesis físicas (iluminación con
ondas planas) y pueden incrementar los efectos negativos de una baja densidad de estaciones
sobre la circunferencia (Jongmans et al., 2005; García-Jerez et al., 2008b). Estas condiciones
óptimas no pudieron satisfacerse completamente en la medida 1.
Una importante limitación para este experimento resulta de la reducida banda espectral útil
proporcionada por los ETNA (sensores de movimiento fuerte) que, cuando se utilizan para el
registro de señales débiles, proporcionan registros con una pobre relación señal/ruido. Para tratar
de acotar este problema, se realizó una medida colocando dos acelerómetros juntos y grabando
ruido ambiental simultáneamente. Como las diferencias de amplitud (ganancia) entre distintos
sensores no repercuten en algunos métodos de autocorrelación espacial si se utiliza una
normalización conveniente, nos centramos en buscar diferencias de fase entre los registros, las
cuáles sí tendrán consecuencias en todos los casos (excepto en el cálculo del HVSR). La figura
5.3.4 muestra inestabilidad en las fases de los registros verticales por debajo de 3-4Hz (las
diferencias de fase entre dos registros tienden ser aleatorias, en lugar de nulas, de modo que su
valor absoluto tiende a valores medios de /2).
5.3.3. ANÁLISIS DE LOS REGISTROS DEL SITIO “UNIVERSIDAD DE ALMERÍA”
La primera etapa del procesado de las señales consiste en el cálculo de su espectro de Fourier.
- 206 -
Aplicaciones.
Los detalles de este cálculo fueron comunes para todos los registros utilizados, esto es, para las
componentes tangenciales y verticales de ambos anillos y para las tres componentes de la
estación central.
Figura 5.3.4. Testeo del rango espectral disponible usando tres acelerógrafos ETNA colocados juntos y comparando
los ángulos de fase de los espectros de Fourier en una medida simultánea de ruido ambiental. Se promediaron 50
ventanas de 33s de duración. Para estos equipos se encuentra una significativa falta de correlación por debajo de 34Hz. Cada color representa una pareja de instrumentos. Se consideran los registros verticales.
Los registros fueron divididos en 60 ventanas temporales no solapadas de 30s de duración. Tal
longitud se considera apropiada para el análisis de frecuencias superiores a 0.33 Hz ya que
contiene más de 10 ciclos para todas las frecuencias en ese rango (p. e. Kind et al., 2005).
Seguidamente, se corrigió de línea base cada una de las ventanas temporales. Para reducir los
efectos de duración finita, antes de realizar la transformada de Fourier sus extremos fueron
suavizados durante un 10% de la longitud del intervalo, usando una ventana de Hanning.
Finalmente, los registros fueron transformados al dominio de la frecuencia mediante DFT.
Cho
Las magnitudes requeridas (HVSR, coeficientes de v-SPAC ̂ V o ̂V y el cociente espectral
tangencial ̂ tgDR ) se calcularon en una segunda etapa. En este experimento no se considerarán los
efectos del ruido incoherente, de modo que evitaremos el índice (s+n) en los coeficientes
anteriores.
Como en los epígrafes previos, el HVSR se obtuvo mediante el cálculo de ratiogramas
(Almendros et al., 2004). El resultado se muestra con una línea negra gruesa en la Fig. 5.3.5c. Se
observa un pico claro a 2.93 Hz con amplitud media de 4.8, muy estable durante los 30 min de
- 207 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
medida.
Para el cálculo de ̂ V , las transformadas de Fourier de las componentes verticales
correspondientes a cada ventana temporal común fueron promediadas acimutalmente para las
estaciones de cada circunferencia. El resultado se dividió entre la transformada de la componente
vertical en la estación central siguiendo (3.3.16). Este procedimiento se realizó separadamente
para cada ventana temporal, promediando finalmente sobre el conjunto de ventanas. También se
realizó el cálculo de ̂VCho (3.3.23), teóricamente más robusto que el anterior. Ambos estimadores
dieron resultados globalmente muy similares, que son comparados en la columna izquierda de la
Fig. 5.3.6. Finalmente, se cálculo el cociente espectral tangencial ̂ tgDR según (3.5.14), que se
muestra con puntos en la Fig. 5.3.6 (columnas central y derecha). La inspección de los resultados
revela inmediatamente los graves efectos del ruido electrónico por debajo de 3-5Hz, que se
manifiestan como un abrupto deterioro en los coeficientes de v-SPAC y DR implicando que esta
banda no pueda ser utilizada. Estos efectos son más notables (empiezan a frecuencias menores)
para las componentes verticales (coeficientes de v-SPAC), debido probablemente a la menor
potencia de la señal. Efectivamente, HVSR > 1 en este rango, como se aprecia en la Fig. 5.3.5.
Figura 5.3.5. Cociente espectral horizontal-vertical para la estación central. (a) Registro de tres componentes. Los
transitorios no fueron considerados en el análisis (banda clara). (b) Representación dependiente del tiempo del
cociente espectral. (c) Cociente espectral promediado (línea negra gruesa) e indicación de intervalo correspondiente
a una desviación estándar con líneas delgadas continuas. La elipticidad del modo fundamental de ondas Rayleigh
para el modelo invertido se muestra con una línea gris gruesa.
- 208 -
Aplicaciones.
Inversión de un perfil de velocidades de onda S
Antes de proceder a la inversión del modelo de estructura superficial, se estimaron los rangos de
frecuencia en los que las curvas experimentales tienen una calidad suficiente. Los límites de baja
frecuencia son fácilmente determinables en función del deterioro de éstas. En el caso de los
coeficientes de v-SPAC, las frecuencias máximas útiles se decidieron visualmente, atendiendo a
las formas de las curvas (comportamiento oscilante, con extremos relativos de amplitud
decreciente,…). Para los coeficientes de DR, y teniendo en cuenta que realizaremos su cálculo
directo simplemente como ̂ tgDR tgDR J1(kL() R2) / J1(kL() R1), necesitamos un criterio más
estricto que prevenga frente a efectos de N finito (bajo campo isótropo) y a grados probables de
contaminación por ondas Rayleigh. Admitiendo (i) una potencia relativa máxima de onda
Rayleigh en la componente horizontal del 47% (situación relativamente desfavorable, dadas las
evidencias experimentales mencionadas en el Capítulo 1); (ii) que las velocidades de onda
Rayleigh y Love pueden considerarse similares a efectos de describir la “contaminación” en tgDR
debida a las primeras; (iii) una desviación absoluta admisible de 0.1 en ̂ tgDR ; podemos obtener
valores máximos de kL R2 para los que el cálculo directo de ̂ tgDR presente desviaciones respecto
a J1(kL() R2) / J1(kL() R1) por debajo del umbral fijado. Estos valores, calculados usando
(3.5.14) para campo isótropo, se muestran en la Tabla 5.3.3 y fueron respetados en la inversión.
Como era previsible, la segunda medida (N=4, R1=24.75m, R2=35m) proporciona un intervalo
útil relativamente pequeño al combinar un pobre número de sensores con una relación de radios
poco eficiente.
Tabla 5.3.3. Valores teóricos máximos de kL R2 para las distintas configuraciones.
N
5
4
4
R1 (m)
15
24.75
17.5
R2 (m)
30
35
35
R2 / R1
2
1.41
2
kL R2 máx.
4.86
3.05
3.57
Inversión
Por simplicidad, el coeficiente de v-SPAC ( ̂ V ), el coeficiente DR ( ̂ tgDR ) y la forma del HVSR
alrededor del pico fundamental se usaron directamente para invertir un modelo del subsuelo en
lugar de determinar previamente las curvas de dispersión Rayleigh y Love.
En este procedimiento de inversión se tratará de introducir la mínima información a priori. El
- 209 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
primer paso fue obtener unas primeras estimaciones de la relación VS vs. profundidad y de la
máxima profundidad resuelta a partir de los datos mismos, asumiendo que las ondas Rayleigh
con longitud de onda R y velocidad de fase cR = R f muestrean una profundidad de R / 3 , a la
cual VS puede ser estimada como 1.1 cR (ver p. e. Tokimatsu, 1997; Duputel et al., 2010). De los
coeficientes de v-SPAC pueden leerse directamente un conjunto de pares frecuencia-longitud de
onda Rayleigh tomando las posiciones (frecuencias) de sus máximos, mínimos y cortes por cero.
Concretamente, de las propiedades de la función de Bessel J0 se sabe que estos coeficientes han
de tener un cero a R = 2.62 R , un mínimo para R = 1.64 R , un segundo cero en R = 1.13 R ,
un máximo en R = 0.90 R , etc. Los pares (h, VS) obtenidos con este método simplificado se
muestran en la Fig. 5.3.7b con círculos. La profundidad máxima resuelta puede estimarse usando
los criterios R max / 3 ó R max / 2 (Park et al., 1999; Tokimatsu, 1997). Una estimación de R max ,
que es la máxima longitud de onda utilizable, puede hacerse a partir del valor de la curva de
correlación Rayleigh en la mínima frecuencia en la que se encuentren datos de buena calidad
(digamos, f min ). En este caso, a la vista de los coeficientes de v-SPAC, se puede tomar f min = 3.5
Hz, con V ( f min ) en torno a 0.7 (se ha usado el caso R = 24.75 m, Fig. 5.3.6 columna izda.).
Seguidamente, la longitud de onda correspondiente puede calcularse como R max 2R / 1.15
usando que J 0 (1.15) 0.7 . Según los criterios de R max / 3 ó R max / 2 , la profundidad máxima
explorada es de 45 ó 68m, respectivamente.
Como en las aplicaciones a la localidad de Mula, la inversión del modelo de suelo se realizó
usando el método downhill-simplex (ver por ejemplo Parolai et al., 2006). Para ello, se
construyó un modelo inicial de 60 m de profundidad. Los 20 m superiores se dividieron
finamente en 4 capas de 5 m de espesor para posibilitar la comparación con la información
geotécnica superficial disponible, añadiéndose dos capas más profundas de 20m sobre el
basamento. Seguidamente el modelo fue ajustado permitiendo variaciones tanto en los espesores
de las capas como en sus velocidades de onda S. Los valores iniciales de VS se calcularon, para
cada capa, interpolando o extrapolando los valores obtenidos con el método simplificado
(círculos en Fig. 5.3.7b) a los centros de éstas. Como las características dispersivas de las ondas
superficiales muestran poca sensibilidad ante variaciones en la densidad ( ) cuando está en el
rango usual entre 1 y 3 g/cc (p. e. Wathelet, 2005), ésta se ha considerado uniforme en la
estructura. Para cada modelo probado, la velocidad de onda P se calculó a partir de la velocidad
de onda S mediante interpolación en una tabla con datos empíricos regionales. En el rango de
- 210 -
Aplicaciones.
Figura 5.3.6. Columna izquierda: De arriba abajo, coeficientes de v-SPAC para arrays circulares de radios 17.5 m.,
24.75 m.y 35 m. Los valores experimentales se muestran con puntos. Los coeficientes teóricos, calculados usando el
modo fundamental Rayleigh del modelo final, se muestran mediante líneas rojas. ̂VCho y ̂V se muestran en azul y
verde, respectivamente.
Columna central: Coeficientes de DR (puntos) calculados para parejas de circunferencias siguiendo la ecuación
(3.5.5). Los radios están indicados en cada subfigura. Como para el caso anterior, las curvas teóricas calculadas a
partir del modo fundamental de ondas Love del modelo final se muestran con línea roja. Este cálculo consiste en el
cociente de funciones J1 que aparece en el miembro derecho de (3.5.5).
Columna derecha: Los puntos y la línea roja gruesa repiten los coeficientes de DR y la curva teórica de la columna
central, ampliando el rango de frecuencias mostrado. La línea roja delgada es la continuación de la roja gruesa a (i.
e. J1(kLR2) / J1(kLR1) a altas frecuencias). Las líneas naranjas, verdes y moradas corresponden a cálculos directos del
coeficiente DR en los que se tienen en cuenta los efectos de N finito y para valores del RLR de 0, 0.5 y 1,
respectivamente.
220m/s a 1700 m/s, tal relación es muy próxima a la encontrada por Kitsunezaki et al. (1990), i.
e. VP(km/s) = 1.29 + 1.11 VS (km/s). La velocidad de onda P de las cuatro capas superiores
(aprox. Los primeros 20m) se fijó en 600m/s (ver comentarios al respecto en la sección
- 211 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
siguiente).
Los cálculos directos se realizan a partir de las curvas de dispersión Rayleigh y Love del modo
fundamental, calculadas con el código de Herrmann (1987). La elipticidad de la onda Rayleigh
se calculó por el método de Haskell (1953), usando una implementación propia.
El modelo final hallado se muestra con una línea continua gruesa en la Fig. 5.3.7a-c, mientras
que los coeficientes de v-SPAC y DR que le corresponden se muestran en la Fig. 5.3.6 con líneas
rojas. El modelo proporciona un buen ajuste de las curvas experimentales en el rango de
frecuencias empleado en la inversión. Finalmente, el HVSR del modelo resultante, calculado en
torno al pico principal como la elipticidad del modo fundamental de ondas Rayleigh (Konno and
Ohmachi, 1998) se muestra en la Fig. 5.3.5c (línea gris gruesa).
Para visualizar la sensibilidad del ajuste a los distintos parámetros del modelo, se ha calculado la
función costo de 10000 modelos generados variando las velocidades de onda S de subconjuntos
aleatorios de capas en un 10% y un 25%. El grado de ajuste de estos nuevos modelos se ha
representado en la Fig. 5.3.7a. El tono de los cuatro rectángulos en escala de grises que hay junto
a cada capa indica el valor más pequeño de la función costo para la variación correspondiente de
su velocidad VS (10% y 25%) y variaciones aleatorias de las del resto de capas. De este
modo, un color oscuro para un valor de VS dado indica que los modelos probados con tal
característica proporcionan ajustes significativamente peores que el invertido. Al contrario, una
banda clara a la derecha (o izquierda) del modelo central denota poca sensibilidad del método
ante un incremento (o decremento) de VS en la capa. También se realizó un test similar para
sensibilidad ante variaciones en la posición de las interfaces entre capas (Fig. 5.3.7b)
considerando 15625 variaciones del modelo final (todas las posibles). Se encontró poca
sensibilidad a la posición de la capa más profunda, que se encuentra ya fuera del límite
correspondiente al criterio R max / 3 (el más restrictivo).
La posibilidad de explicación de los datos mediante un modelo más simple compuesto de dos
capas sobre un semiespacio fue también investigada. La disminución del número de parámetros
facilitó el uso de un algoritmo genético como herramienta de inversión. Se variaron en este caso
la velocidad de onda S y el espesor de las capas para una población de 40 modelos que
evolucionaron a lo largo de 150 generaciones. El algoritmo buscó el modelo óptimo dentro de los
rangos:
- 212 -
Aplicaciones.
- VS entre 100 y 400 m/s para la capa superior, de 200 a 700 m/s para la segunda y de 600 a 1500
m/s para el semiespacio;
- espesores ( h ) de 3 a 25 m para la capa superior y de 10 a 50 m para la inferior.
Las variables fueron discretizadas a 6 bits. El modelo resultante, que se muestra en la Fig. 5.3.7c
con línea punteada, parece una versión sintetizada del de seis capas hasta 32m, pero con un
semiespacio más superficial y rígido. El grado de ajuste es significativamente peor (0.11 en la
escala de Fig. 5.3.7) pues no logra reproducir la frecuencia fundamental y la forma del HVSR en
torno al máximo. Finalmente, se llevó a cabo un tercer intento de inversión usando el algoritmo
downhill-simplex para modelos parametrizados de igual modo a como se hizo con el algoritmo
genético. Los espesores de las capas del modelo inicial fueron, de arriba a abajo, 20 y 30 m
mientras que sus velocidades de onda S se obtuvieron de los datos experimentales del mismo
modo que para el modelo inicial de seis capas. Tras invertir los espesores y las VS , se obtuvo un
modelo similar al del algoritmo genético hasta ~32m (línea discontinua en la Fig. 5.3.7c) pero
con un semiespacio más profundo y menos rígido. Este semiespacio está más en consonancia con
la profundidad y velocidad de los materiales pliocenos encontrados en el punto Desaladora (Figs.
5.3.3 y 5.3.14). Su ajuste es sólo ligeramente peor que el del modelo de seis capas (0.071),
reproduciendo el HVSR en un grado similar a éste.
En la Fig. 3.6.8a se muestra una comparación con el modelo simplificado obtenido por ChavezGarcía and Luzón (2005) en el mismo punto a partir de tres sondeos geotécnicos de tipo SPT
(Standard Penetration Test) utilizando las relaciones de Yoshida and Motonori (1988) para
obtener VS. Ese modelo se muestra con línea gris. La estratigrafía cortada en el sondeo consiste
en diversas capas de limos arcillosos, arenas gruesas, arenas finas y arenas con gravas con un
espesor de unos 15m sobre un lecho de gravas. También existe un sondeo de refracción de onda
S muy superficial, realizado a unos cien metros del sitio de prueba, que encuentra 179 m/s para
los primeros 6m de suelo. Aunque dados el carácter superficial del sondeo, su relativa distancia y
las diferentes actuaciones artificiales sobre los primeros metros del suelo, los perfiles no son
directamente comparables, se puede mencionar que ese valor está desviado un 13% a la baja
respecto a la media de los seis primeros metros de nuestro modelo de seis capas, y sólo un 9 y un
3% respecto a la primera capa de los modelos de dos capas obtenidos con downhill-simplex y
GA. Como se observa, los resultados obtenidos a partir de ruido ambiental concuerdan
- 213 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
satisfactoriamente con los de los sondeos para profundidades en el rango en el que se esperaba
buena resolución de las arrays (delimitado por líneas discontinuas horizontales) que se ha
calculado en Fig. 5.3.8. mediante el criterio R / 3 para la curva de dispersión del modo
fundamental Rayleigh.
Figura 5.3.7. (a) Con línea negra gruesa se muestra el modelo final para el sitio Universidad obtenido del análisis de
microtremores. La sensibilidad del ajuste ante variaciones de 10% y 25% en la velocidad de onda S de cada capa
se representa con rectángulos grises. (b) Estudio de sensibilidad similar al anterior para variaciones en las posiciones
de los límites de las capas. (c) Modelos de tierra, formados por dos capas sobre el basamento, invertidos mediante
un algoritmo genético (línea punteada) y mediante el método downhill-simplex (línea discontinua), comparados con
el modelo final de seis capas (línea continua).
- 214 -
Aplicaciones.
Discusión y conclusiones
En esta sección se han utilizado métodos de autocorrelación espacial (tipo SPAC) para obtener
un perfil de la estructura superficial en el sitio Universidad en términos de la velocidad de onda
S. Para constreñir mejor el modelo invertido, se consideraron tanto la velocidad de fase de onda
Rayleigh como la de onda Love, determinadas respectivamente mediante el método v-SPAC y el
método DR desarrollado en esta tesis. Globalmente, se pudo recuperar algún tipo de información
creíble de correlación (v-SPAC o DR) entre los 2.6Hz y los 11Hz, resultando el método DR más
eficiente en el extremo de baja frecuencia, quizás porque la mayor potencia de la señal Love en
torno a la frecuencia de resonancia facilita el uso de sismómetros ruidosos. Por el contrario, el
método v-SPAC se aplicó con más éxito a altas frecuencias, ya que V resulta menos
perjudicado por los efectos de N-finito no siendo necesario disminuir tanto los radios de las
arrays para estudiar longitudes de onda cortas. La forma del HVSR (Nakamura, 1989) aportó una
condición adicional para la determinación del modelo de suelo, usando la elipticidad de la onda
Rayleigh (en valor absoluto) como cálculo directo.
Figura 5.3.8. (a) Comparación entre los perfiles superficiales de velocidad de ondas S obtenidos en el sitio de prueba
(Fig. 5.3.1). El modelo obtenido por análisis de microtremores compuesto de seis capas sobre el semiespacio se
muestra con una línea negra gruesa. Un modelo simple consistente en dos capas sobre semiespacio se muestra con
línea discontinua. El obtenido a partir de un sondeo mecánico tipo SPT se muestra en gris. Las líneas horizontales
muestran el rango de profundidades en el que las arrays dan suficiente precisión según el criterio R max / 3 . Si se usa
el criterio R max / 2 , la profundidad máxima es de 68m. (b) Curvas de dispersión de ondas Rayleigh y Love
correspondientes al modelo de seis capas (línea negra gruesa de la subfigura (a)).
- 215 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
La teoría sobre los efectos de N finito en tgDR , desarrollada en el Capítulo 3, se ha empleado aquí
para establecer las longitudes de onda mínimas a las que estas perturbaciones son (con gran
probabilidad) despreciables y poder usar así las expresiones correspondientes al caso N .
Admitiendo que el modelo invertido es una buena aproximación a la estructura real, podemos
valorar ahora hasta qué punto el comportamiento de los coeficientes de DR experimentales es
explicable a mayores frecuencias. En la tercera columna de la Fig. 4.3.7 se muestran los cálculos
directos de las curvas ̂ tgDR para el modelo invertido y bajo campo isótropo, según la formulación
expuesta en la Sección 3.5.3 que tiene en cuenta los efectos de N finito. Se representan para
valores constantes (independientes de la frecuencia) de RLR de 0, 0.5 y 1. Como los coeficientes
se han extendido hasta frecuencias considerablemente más altas que las ajustadas en la inversión,
no se espera un ajuste perfecto en ese rango. Aún así, el parecido entre las curvas experimentales
y las teóricas es notable, especialmente en cuanto a la posición de los máximos y mínimos
relativos. El caso N=4, R2=35m, R1=17.5m es el más sensible al RLR. Un valor de este parámetro
entre 0.5 y 1 podría reproducir los tres experimentos simultáneamente hasta más de 7 Hz,
requiriéndose algún reajuste de la curva de dispersión de onda Love a frecuencias mayores. El
caso N=4, R2=35m, R1=24.75m, que a priori es el que presentaría efectos de N finito más serios,
es el que queda mejor reproducido. Estos resultados sugieren que esquemas de inversión basados
en un modelado más avanzado de los datos pueden ser viables (ver p. e. Sección 5.3.4).
Se comprueba que en el rango de frecuencias en que se ajustaron los coeficientes de DR (rango
de los segmentos rojos gruesos en la columna derecha) todas las curvas que consideran efectos
de N finito coinciden entre sí y con el cálculo que no considera tales efectos (i. e. con las líneas
rojas), confirmándose así que el intervalo de frecuencias utilizado en la inversión para estos
coeficientes era seguro.
La figura correspondiente a N=5, R2=30m, R1=15m sugiere una peor relación señal / ruido a altas
frecuencias, que empieza ya a percibirse a unos 5 Hz. Esto es consistente con las peores
condiciones de observación de esa medida (Tabla 5.3.2).
En cuanto a los resultados de la inversión, cabe destacar la buena correspondencia entre los
modelos de dos capas que se han obtenido y el modelo simplificado determinado por ChavezGarcía and Luzón (2005) mediante SPT (Fig. 5.3.8). Ambos coinciden en la existencia de un
contraste importante a unos 15m, si bien, en nuestro modelo detallado el contraste aparece de
- 216 -
Aplicaciones.
forma más gradual entre los 15m y los 20m. Estos resultados i) confirman que los métodos de
exploración sísmica tipo SPAC son una opción con buena relación efectividad-costo; ii) apuntan
a que el método DR es efectivo en la práctica, pues ha proporcionado velocidades de onda Love
con el comportamiento dispersivo esperado (Fig. 5.3.8b) y con valores compatibles con el resto
de los datos.
5.3.4. ANÁLISIS DE LOS REGISTROS DEL SITIO “DESALADORA”
Como se afirmó anteriormente, el objetivo de este experimento es investigar sobre las
capacidades del método SCA. Gran parte de este trabajo puede encontrarse en García-Jerez et al.
(2010).
Como en este segundo experimento en la zona se dispuso de instrumental más apropiado (con
buena sensibilidad a bajas frecuencias) así como de mejor información previa sobre la estructura,
se pudo aspirar a obtener un perfil de velocidades de onda S más fiable y profundo sin utilizar la
información contenida en las ondas Love. Esto permite realizar posteriormente una comparación
no sesgada entre la curva de dispersión de onda Love experimental y la teórica, obtenidas de
modo totalmente independiente.
Obtención de un modelo profundo
El primer objetivo fue obtener un modelo de la estructura del sitio que alcance el basamento
triásico. Para que la profundidad de éste quede bien definida, se ha realizado la inversión de
algunas características del HVSR junto con la curva dispersión de onda Rayleigh obtenida a
partir de las componentes verticales mediante SPAC. Al disponer también de datos tomados con
arrays relativamente grandes (radio máximo de 420m, distancia máxima entre estaciones de
554m) se espera que el basamento, al que se le estima una profundidad del orden de 500m, pueda
ser resuelto.
La figura 5.3.9 muestra el cociente espectral HVSR medio obtenido en los vértices de la array de
18m. Presenta un pico predominante a 0.35Hz (2.82s) de amplitud ~5.4 que identificamos como
la frecuencia fundamental del sitio. A este rango de periodos y a periodos aún más largos el
cociente espectral presentaba cierta inestabilidad, que ha sido aminorada en gran medida
eliminando varias ventanas temporales problemáticas. La gran similitud para frecuencias por
debajo de 0.6-0.7 Hz con el HVSR obtenido en la estación de banda ancha UALM, que sí está
instalada en condiciones óptimas, permite afirmar que el resultado es creíble por encima de 0.28
Hz. Existe un segundo pico a ~2.7 Hz (amplitud 3.7) que concuerda aproximadamente con el
- 217 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
encontrado en el sitio Universidad, si bien, no es el pico dominante en la desaladora.
Para la aplicación del método SPAC a los registros de componente vertical, hubo que tener en
cuenta que, a excepción de la triangular, las arrays carecían de estación central. Las correlaciones
fueron entonces calculadas entre las componentes verticales obtenidas para las distintas parejas
de estaciones que forman los lados y las diagonales de los pentágonos.
Figura 5.3.9. HVSR calculado en el sitio Desaladora (en negro) comparado con el obtenido en la estación de banda
ancha UALM (en gris), situada en las proximidades del sitio Universidad. En el caso del sitio Desaladora, se
muestra la media y la desviación típica de 5 medidas tomadas en los vértices de un pentágono de 18m de radio. En
ambos casos, se tomaron ventanas de 60s y se realizó un ligero suavizado espectral de 0.1Hz de ancho.
Las densidades espectrales cruzadas correspondientes a parejas con la misma distancia fueron
promediadas. Como los lados (y las diagonales) de cualquier polígono regular están también
orientados regularmente en el acimut, esta forma de aplicar el método SPAC no es más sensible a
la posible anisotropía del campo que el método v-SPAC en su formulación convencional (con
estación central), aunque sí lo es a la estacionaridad espacial del microtemor.
La inversión del modelo de suelo se realizó a partir de la curva de dispersión Rayleigh y de la
posición de la frecuencia fundamental y del primer mínimo del HVSR. Se utilizó el algoritmo de
inversión híbrido paralelizado que se desarrolló en el Capítulo 4 que combina un método
optimización local (en este caso el método Downhill-Simplex) y búsquedas aleatorias en el
espacio de los modelos. Para delimitar una región en la que generar los modelos aleatorios, se
utilizó la información geológica y geofísica previa (Sección 5.3.2), asignando capas de
- 218 -
Aplicaciones.
propiedades uniformes a los estratos con materiales y edades homogéneas. Los límites de esta
región se detallan en la Tabla 5.3.4. La velocidad de onda P de la capa superior, que en su mayor
parte no está saturada (IGME, 1973, Carrasco and Martín, 1988) se ha estimado mediante las
relaciones obtenidas por Valle-Molina (2006) en experimentos de laboratorio (concretamente,
como la velocidad media en una columna de ~ 20m de arena seca). Para el resto de las capas, la
velocidad de onda P se calculó, como en el apartado anterior, a partir de la velocidad de onda S
mediante interpolación en una tabla con datos empíricos regionales (próxima a la relación
VP(km/s) = 1.29 + 1.11 VS (km/s) en el rango de 220m/s a 1700 m/s, Kitsunezaki et al., 1990).
Para evaluar el grado de ajuste de cada modelo, se utilizó un esquema de misfit ecualizado
respecto al número de datos por observable, sin imposición de pesos arbitrarios (Ec. 4.1.4).
Tabla 5.3.4. Intervalos de los parámetros usados en el algoritmo de búsqueda aleatoria. Valores máximos y mínimos
iguales identifican propiedades que permanecen constantes en la inversión.
ESPESORES (KM)
CAPA
MÍN.
1
0.0168
2
0.0357
3
0.4350
4
1.1210
VELOC.
CAPA
1
2-5
MÁX.
0.0280
0.0595
0.7250
1.8684
P (KM/S)
MÍN.
MÁX.
0.5132
0.5132
relación empírica
con Vs
VELOC.
CAPA
1
2
3
4
5
S (KM/S)
MÍN.
0.2337
0.4548
0.8335
1.8145
2.6000
DENSIDAD (G/CM3)
CAPA
MÍN.
1
1.8000
2
1.9000
3
2.0000
4
2.7000
5
2.7000
MÁX.
0.3894
0.7580
1.3891
2.5000
2.6000
MÁX.
1.8000
1.9000
2.0000
2.7000
2.7000
En las Figuras 5.3.10-11 se muestran los resultados de esta inversión (modelo ajustado y cálculos
directos de la velocidad de onda Rayleigh). En la Fig. 5.3.11 se incluye la determinación del
modelo medio y de la matriz de covarianzas normalizada. En el mejor modelo invertido, la capa
de aluviales holocenos tomó un espesor de 22m (20m para el modelo medio), dejando paso a las
gravas y arenas pleistocenas hasta los 58m (64m para el modelo medio) de profundidad. Al
paquete de margas miocenas se le estiman 485m (484m) de espesor. Visualmente, el grado de
ajuste de la velocidad de onda Rayleigh es muy bueno. Los extremos relativos del HVSR
también quedaron bien ajustados, estando el pico y el mínimo a 0.38 y 0.75Hz para el mejor
modelo (0.36 y 0.76Hz son los valores experimentales). El test estadístico simple mencionado en
el Apéndice IV.A, asumiendo que los 67 datos empleados son independientes, arroja un nivel de
confianza del 99.7% para el mejor modelo obtenido en el ajuste.
- 219 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
2500
>0.71
0.69
2000
0.63
1500
0.61
Misfit / dato
Velocidad Rayleigh (m/s)
0.66
1000
0.58
0.55
500
0.53
0
0
5
10
15
20
25
Frecuencia (Hz)
Figura 5.3.10. Curva de dispersión de ondas Rayleigh experimental obtenida para el sitio Desaladora (puntos) y
cálculos directos para los 2000 modelo resultantes del algoritmo de inversión híbrido (excluidos los modelos
parciales usados por el algoritmo de búsqueda local), coloreados según el grado de ajuste (se usa el modo
fundamental en los cálculos directos).
0
>0.71
10
0.69
20
0.66
0.63
40
50
0.61
60
0.58
70
0.55
80
0.53
90
100
0
200
400
600
800
Velocidad de onda S (m/s)
1000
1200
1400
0
Profundidad (m)
500
1000
1500
2000
2500
0
500
1000
1500
2000
Velocidad de onda S (m/s)
- 220 -
2500
3000
Misfit / dato
Profundidad (m)
30
Aplicaciones.
1
Espesor capa Nº
0.9
2
0.8
3
0.7
0.6
4
Velocidad S capa Nº
0.5
1
0.4
2
0.3
3
0.2
0.1
4
1
2
3
Espesor capa Nº
4
1
2
3
Velocidad S capa Nº
4
Figura 5.3.11. Resultado de la inversión del modelo superficial en el delta del río Andarax (sitio Desaladora) a partir
de datos de velocidades de onda Rayleigh y HVSR. Los sondeos eléctricos y mecánicos previos han sido tenidos en
cuenta al acotar la región del espacio de los modelos explorada. Arriba: detalle de los 100m superficiales. Centro:
modelo completo. El modelo medio y las desviaciones típicas de sus parámetros se muestran en azul, mientras que
el mejor modelo probado se muestra en rojo. Los puntos verdes representan un perfil aproximado obtenido
directamente de la curva de dispersión Rayleigh mediante el criterio R/3 (p. e. Tokimatsu, 1997). Los valores de
misfit corresponden al corchete del numerador de (4.1.5). Abajo: matriz de covarianzas normalizada (ver sección
4.3.1).
Análisis de los registros mediante el método SCA.
Para la aplicación del método SCA se realizó, en primer lugar, un filtrado paso-banda a las trazas
entre 0.1 y 30Hz y se dividieron en un conjunto de ventanas de 20s parcialmente solapadas. Esta
longitud de ventana puede considerarse apropiada para el análisis de frecuencias mayores que
0.5-1Hz. Las ventanas fueron suavizadas en los bordes en un 5% de sus longitudes y
transformadas al dominio de la frecuencia. Seguidamente, los coeficientes de Fourier de órdenes
0 y ±1 de las componentes vertical, radial y tangencial fueron estimados para cada ventana
siguiendo la ecuación (3.3.13) y finalmente, se operaron para obtener nBII y d BII a partir de
(3.6.12) y (3.6.13). Estas dos cantidades se promediaron para el conjunto de ventanas
temporales, evitando aquellas en las que el ruido era claramente no estacionario. Se denominará
aquí BIIexp al cociente entre ambos promedios y lo consideraremos como una estimación empírica
( sn)
de B̂II (o de Bˆ II
cuando en el análisis posterior se tengan en cuenta los efectos del ruido no
correlacionado). Estas cantidades son mostradas con líneas negras y para cada radio, en las
Figuras 5.3.12a-e.
- 221 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Una estimación directa de la curva de dispersión de onda Love puede obtenerse ya, considerando
que BIIexp puede igualarse a J 0 ( x L ) J 2 ( x L ) J 0 ( x L ) J 2 ( x L ) (Eq. 3.6.11). Como se muestra
en la Fig. 5.3.13a, esta aproximación es apropiada para valores bajos de x L , dentro de la primera
parte decreciente de BIIexp , y principalmente hasta el primer corte por cero ( x L <1.84), y asume
que los efectos del ruido no correlacionado y de número de sensores finito pueden ser ignorados.
Figura 5.3.12. (a)-(e): Las líneas negras muestran BIIexp obtenido mediante arrays pentagonales desplegadas en el
sitio de prueba. El título sobre cada panel indica el radio de la array. Las líneas grises continuas muestran los
cálculos directos de Bˆ II( s n ) a partir de una curva de dispersion suave y de un RLR constante, ambos comunes todos
los radios, así como de sendas relaciones NSR – f ajustadas previamente (ver texto). Las líneas negras discontinuas
y punteadas muestran las funciones B̂II calculadas para el modo fundamental y el primer modo superior
correspondientes al modelo de estructura, asumiendo NSR=0, RLR=0, N=5 y campo isótropo. Las líneas verticales
discontinuas muestran el rango en que los datos han sido usados. (f) Relaciones lineales entre NSR y f ajustadas para
cada array.
En este caso, x L ha sido calculado a partir de BIIexp usando una expansión en serie de potencias
(Ec. 3.6.7, Fig. 3.6.3). Para preservar la claridad de la figura, las velocidades se muestran en el
rango en el que permanecen mínimamente creíbles. En la Fig. 5.3.13a también se muestran las
curvas de dispersión correspondientes a los 2000 modelos de suelo resultantes del algoritmo de
inversión (escaladas en grises como en las Figs. 5.3.10-11, con los datos de onda Love excluidos
del ajuste). A pesar de las hipótesis restrictivas involucradas, se evidencia que seleccionando y
- 222 -
Aplicaciones.
combinando segmentos apropiados con tendencia concordante, se construiría una curva de
dispersión muy próxima a las curvas teóricas de los mejores modelos (modo fundamental).
Alternativamente, la Figura 5.3.13b muestra las velocidades de fase de onda Love obtenidas
mediante un procedimiento en tres pasos que tiene en cuenta los efectos de N finito y del ruido
no correlacionado. Primero, ajustamos a las cinco curvas experimentales f vs. BIIexp una única
curva de dispersión suave de la forma cL ( f ) A f a ebf , donde A, a y b son parámetros reales
(p. e. Saccorotti et al., 2001). En este paso BIIexp es comparado con el cálculo directo de B̂II para
un campo isótropo con RLR=0. Todos los ajustes fueron hechos usando el método downhillsimplex (Nelder and Mead, 1965) con funciones costo definidas simplemente como
Nf
i 1
B
2
B ( f i ) Bˆ II ( f i ) o
exp
II
Nf
i 1
exp
II
2
( f i ) Bˆ II( sn ) ( f i ) , donde f1 , f 2 , …, f N f son las frecuencias
exp
en las cuales BII presentaba buena calidad (bandas entre líneas verticales discontinuas en Figs.
5.3.12a-e). Los costos correspondientes a los distintos radios fueron normalizados por los valores
respectivos de Nf y seguidamente sumados para definir un costo global. La curva de dispersión
suave ajustada viene dada por A =0.937, a =0.575 y b =0.0214. Después de esto, se ajustó un
RLR constante y común para los cinco radios y una relación lineal entre f y NSR para cada radio.
Este comportamiento lineal parece funcionar bien con estos datos en las bandas de frecuencia
usadas (las marcadas entre líneas verticales en las Figs. 5.3.12a-e), aunque esto no puede
considerarse una regla general. Los parámetros que definen cL ( f ) se mantuvieron constantes, y
se asumió NSRV=NSRH=NSR. Como la curva de dispersión Rayleigh es necesaria en este paso,
se utilizó la obtenida previamente mediante el análisis de las componentes verticales con SPAC.
El valor obtenido para el RLR fue 0.36 (esto es, 26.5% de la potencia en forma de ondas
Rayleigh), y las relaciones ajustadas NSR vs. f se muestran en la Fig. 5.3.12f. Finalmente, se
reajustaron las curvas de dispersión suaves independientemente para cada radio, usando la curva
de dispersión suave global como modelo inicial. En este paso los cocientes NSR y RLR se
mantuvieron fijos. Las porciones creíbles de estas curvas se muestran en la Fig. 5.3.13b, mientras
que su valor medio está en la Fig. 5.3.13c. Las líneas grises en las Figs. 5.3.12a-e muestran los
( sn)
cálculos directos de Bˆ II
para cada radio obtenidos del ajuste final. Por comparación con los
datos experimentales se puede sospechar que la mayoría de los NSRs de la Fig. 5.3.12f están
sobreestimados a altas frecuencias debido a la hipótesis simplificadora de relación lineal. En tal
caso, las amplitudes de los máximos y los mínimos de Bˆ II( s n ) están subestimadas (p. e. Fig.
- 223 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Figura 5.3.13. (a): En verde y azul, fragmentos de las curvas de dispersión obtenidas directamente a partir de BIIexp ,
solucionando la ecuación (3.6.11). Para cada radio, las flechas indican a qué frecuencia se tiene xL = 1.84. Se asume
que estos valores marcan un límite seguro para el caso de una array pentagonal (ver texto); (b) curvas suaves
obtenidas, para cada radio, usando un algoritmo que tiene en cuenta el número finito de sensores y ajusta relaciones
lineales NSR vs. f y un RLR constante (ver texto); (c) media de las curvas de dispersión experimentales mostradas
en la subfigura anterior (línea verde), más y menos una desviación estándar. En todas las subfiguras, las líneas en
escala de grises representan las curvas de dispersión de onda Love correspondientes a los modelos mostrados en Fig.
5.3.11 (que fueron ajustados sin tener en cuenta los datos de onda Love). Tales curvas conservan el tono de gris de
los modelos correspondientes (no se reevalúa ahora el misfit). En la subfigura (c) se muestran también los cálculos
directos para el primer modo superior de onda Love.
- 224 -
Aplicaciones.
5.3.12c alrededor de 11Hz). Por el contrario, el nivel de ruido parece estar subestimado a
frecuencias por debajo del rango ajustado en las Figs. 5.3.12a-e. Las líneas discontinuas y
punteadas muestran las formas teóricas de las funciones B̂II en el caso NSR=0, RLR=0, N=5 y
campo isótropo, para el modo fundamental y para el primer modo superior de ondas Love
calculados del modelo de suelo. Aunque se necesita más investigación sobre la influencia de los
modos superiores, no se puede descartar su contribución en algunos rangos de frecuencia (p. e.
en el abombamiento alrededor de 10Hz para R =12m y en la caída inesperada a unos 13 Hz para
R =18m). Se ha comprobado que los ajustes tienen una sensibilidad muy limitada en el RLR.
Recuérdese que el método se vuelve insensible al RLR conforme el número de estaciones N
tiende a infinito. Si el RLR se remplaza por 1 antes del paso final (ajuste de los cinco segmentos
suaves de las curvas de dispersión), la curva de dispersión promediada resultante cambia un
3.3% de media. La máxima variación (menor del 8%) se tiene en el rango 20.6 - 22.5 Hz. Esto
sugiere que una estimación aproximada del RLR puede ser suficiente en muchas situaciones
ordinarias.
En conclusión, los resultados globales indican que el procedimiento empleado para la extracción
de la curva de dispersión permite considerar apropiadamente los efectos de N finito y del ruido
no correlacionado, extendiendo el rango útil de frecuencias más allá del primer mínimo de BIIexp .
El procedimiento de ajuste podría ser refinado en el futuro en base a la teoría desarrollada en el
Capítulo 3.
En este punto podemos preguntarnos qué hubieran aportado los datos de onda Love a la
inversión del modelo de suelo. En la Figura 5.3.14 se muestran, en gris, los 100 primeros metros
del modelo medio obtenido mediante inversión conjunta de las curvas de dispersión Rayleigh y
Love (junto a las frecuencias de primer máximo y mínimo del HVSR), que se compara con el
resultado obtenido sin los datos de onda Love (en negro). En esta ocasión y en ambos casos, la
velocidad de onda P de la primera capa se ha invertido también (como una variable
independiente). Se aprecia que la inversión conjunta disminuyó considerablemente las
incertidumbres en el modelo resultante (especialmente en velocidades). En ausencia de datos de
onda Love, una velocidad de onda S excesiva puede ser parcialmente compensada por una
velocidad baja de onda P para obtener una velocidad Rayleigh que ajuste bien los datos. Esto
genera grandes incertidumbres en las velocidades P y S (ver indeterminaciones en éstas variables
- 225 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
en la primera capa del modelo, en negro). En este caso, es necesario imponer información a
priori, p. e., limitando los radios de Poisson o, de modo más radical, imponiendo una relación
entre ambas velocidades. Sin embargo, existen casos en los que la velocidad de onda P de un
material es extremadamente variable (p. e., dependiendo del grado de saturación o del
coeficiente de Skempton, ver p. e. Valle-Molina, 2006) mientras que la velocidad de onda S es
bastante estable. El añadir la curva de dispersión de onda Love (insensible a la velocidad de onda
P) al proceso de inversión contribuye a mitigar los efectos sobre el modelo invertido de esta
interdependencia.
Figura 5.3.14. Modelos medios invertidos para el sitio Desaladora usando (gris) y sin usar (negro) los datos de
velocidades de onda Love. La velocidad de onda P de la primera capa ha sido también invertida. Los datos de
velocidad de onda Rayleigh y los extremos del HVSR también se emplean en ambos casos.
Conclusiones
La implementación del método SCA basada en el estimador BII (García-Jerez et al., 2010) ha
mostrado un comportamiento bastante robusto al utilizarlo con datos reales. Se ha aplicado el
método SCA para calcular curvas de dispersión de onda Love a partir de los registros de tres
componentes grabados por cinco arrays pentagonales sin estación central en un sitio en el que la
estructura era conocida. El experimento confirma que las ecuaciones obtenidas en las Secciones
3.6.5-6 pueden extender significativamente el rango útil de longitudes de onda. De hecho, las
formas experimentales de BII han sido exitosamente interpretadas hasta xL = 11.7 (de media)
- 226 -
Aplicaciones.
asumiendo iluminación isótropa, aunque este límite puede depender fuertemente de las
condiciones del campo, como se observó en el Capítulo 3. Si, por el contrario, los efectos del
aliasing y del ruido incoherente son ignorados, las velocidades de onda Love pueden aún
obtenerse hasta alrededor de x L = 1.84.
Se requiere todavía algún trabajo para mejorar el procedimiento, incluyendo el ajuste o
estimación de la relación ruido-señal y el cálculo óptimo de las curvas de dispersión y de las
incertidumbres asociadas.
- 227 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
- 228 -
CAPÍTULO 6
CONCLUSIONES Y FUTURAS LINEAS DE
TRABAJO
6.1. CONCLUSIONES.
Las conclusiones más importantes alcanzadas en este trabajo son resumidas a continuación.
De la revisión bibliográfica realizada y de la experiencia acumulada en este trabajo se concluye
que, al menos en ciertos tipos de ambientes geológicos y en amplias bandas de frecuencia, el
ruido ambiental está dominado por ondas de tipo superficial que se propagan de modo coherente
por el subsuelo. Como a frecuencias por debajo de 1Hz estas ondas son generadas en procesos
oceánicos y meteorológicos, alcanzan con más potencia las zonas continentales cercanas a las
costas. La existencia de estructuras sedimentarias con elevado contraste es también es una
situación favorable para su detección. A frecuencias por encima de 1Hz, la existencia de fuentes
de ruido cultural cercanas juega un papel importante en el contenido de ondas superficiales,
debido a la gran atenuación inelástica.
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Existen dos familias de métodos para el tratamiento de ruido sísmico mediante una array de
sensores con características muy diferentes: los métodos f-k y los métodos tipo SPAC. De las
formulaciones expuestas, la revisión bibliográfica y los ejemplos numéricos realizados se
concluye que:
i) Los métodos f-k son aplicables preferentemente a situaciones en las que, para cada frecuencia,
el microtremor esté dominado por ondas procedente de una única dirección. Aún así, existe la
posibilidad de separar ondas procedentes de distintos acimuts o con distintas velocidades de fase
(p. e., distintos modos de ondas superficiales), si bien el rango de longitudes de onda en el que
esta distinción es viable suele ser muy limitado y fuertemente dependiente de las características
de la array (abertura y densidad de estaciones). La posible correlación entre las fases de las ondas
procedentes de distintas direcciones supone una seria dificultad para estos métodos que puede ser
aminorada mediante un promedio espacial adecuado si la array contiene suficientes parejas de
estaciones redundantes (misma distancia y dirección). Al margen de esta particularidad, los
métodos f-k son aplicables indistintamente en arrays regulares e irregulares.
ii) Los métodos tipo SPAC son especialmente adecuados cuando el campo contiene ondas
provenientes de distintas direcciones: de hecho, la mayor parte de estos métodos funcionan
óptimamente bajo campo isótropo. Si el campo tiene una o unas pocas direcciones claramente
predominantes (i.e. iluminación fuertemente anisótropa) se pueden estimar los errores máximos
cometidos y establecer rangos seguros en la determinación longitud de onda, que serán función
del tamaño de la array y del número de estaciones. Estos métodos admiten la existencia de
señales correlacionadas que viajen a la misma velocidad (no se hacen hipótesis restrictivas en las
formulaciones deterministas del Capítulo 3). Son aplicables óptimamente a arrays circulares (i.e.
sensores dispuestos en los vértices de polígonos regulares) o semicirculares (métodos v-SPAC y
3c-SPAC), si bien, este requisito puede ser relajado en algunas variantes. En condiciones de
campo isótropo, los métodos v-SPAC y 3c-SPAC se pueden utilizar con arrays irregulares.
Se ha desarrollado un método, al que denominamos DR (Double Ring), que permite calcular
velocidades de ondas Love usando una array compuesta por dos circunferencias concéntricas en
las que se registran las componentes tangenciales. En comparación con el método convencional
(3c-SPAC) se tiene un procesamiento mucho más sencillo de los registros, en el cual la velocidad
de onda Love es calculada de modo independiente a la velocidad de onda Rayleigh (hasta cierta
longitud de onda mínima en arrays reales). Se han obtenido las expresiones analíticas para los
- 230 -
Conclusiones y futuras líneas de trabajo.
efectos de número de sensores finito y ruido incoherente y, en ejemplos sintéticos, se ha
comparado con el método TR (Tada et al., 2006) que utiliza el mismo montaje experimental. De
los resultados se deduce cierta superioridad de nuestro método en cuanto al rango útil de
números de onda en ausencia de ruido incoherente (el DR permanece estable hasta longitudes de
onda Love algo más cortas). En presencia de ruido, el rango en el que el método DR permanece
poco afectado se desplaza a longitudes de onda menores (en torno a los ceros de J0(kLR2)) en
comparación al método TR.
Se ha desarrollado un segundo método, al que denominamos SCA (Single Circular Array) que
permite calcular velocidades de onda Love y Rayleigh utilizando una array circular formada por
estaciones de tres componentes. Usando este método se reduce el coste, en cuanto a número de
estaciones, en comparación con los métodos DR y TR. Por otra parte, la técnica SCA procesa
también las componentes verticales del registro, requiriendo que se correspondan los modos de
propagación Rayleigh que se registran en las componentes horizontal y vertical). En
comparación con el método 3c-SPAC, cabe destacar que el SCA sí permite el cálculo
independiente de la velocidad de la onda Love (en aplicaciones prácticas en las que el número de
estaciones es muy limitado, esta propiedad sólo se tiene para longitudes de onda suficientemente
largas). Se han realizado diversos estudios numéricos que prueban la utilidad del método SCA.
En el Capítulo 3 se han recuperado varios métodos de tipo SPAC en un contexto determinista.
En particular, los métodos v-SPAC (Aki, 1965), 3c-SPAC (Okada and Matsushima, 1989), TR
(Tada et al., 2006), MSPAC (Bettig et al., 2001; Köhler et al., 2007) tienen una translación más o
menos directa a esta descripción del campo. Por el contrario, los métodos CCA, CCA-L y
SPACL no se pueden traducir al caso determinista. Esto se debe a que la independencia
estadística entre las ondas procedentes de distintos acimuts es una condición necesaria en estos
para estos últimos.
Los métodos DR y SCA, fueron formulados originalmente en el contexto determinista (GarcíaJerez et al., 2008ab). Aquí se demuestra su aplicabilidad bajo campos aleatorios estacionarios,
una vez que sus definiciones son convenientemente reescritas.
En el Capítulo 4 se ha tratado la implementación de algoritmos de inversión híbridos en los que
se combina una búsqueda tipo Monte Carlo con métodos de optimización local (inversión
linealizada y método Downhill Simplex), complementándose con un análisis estadístico de los
- 231 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
resultados. Con objeto de hacer viable la evaluación masiva de modelos de suelo, se ha
elaborado un software paralelizado escrito en FORTRAN77 y MPI. Su capacidad ha sido
comprobada en un ejemplo sintético sencillo (5 parámetros libres), consiguiéndose capacidades
incluso superiores a las de un algoritmo genético cuando se ejecutan el mismo número de
cálculos directos (si bien, se necesitarán más ejemplos para llegar a conclusiones rotundas).
Como era previsible, el ajuste de la relación entre número de modelos generados aleatoriamente
y el número de iteraciones realizadas con los algoritmos locales juega un papel importante. Un
ejemplo completo de la aplicación del algoritmo en un caso real se muestra en el Capítulo 5 para
el experimento Desaladora (en la desembocadura del río Andarax). Una colección más extensa
de aplicaciones podrá encontrarse en Luzón et al. (2010).
En el Capítulo 5 se ha utilizado el método del HVSR (técnica de Nakamura) para explorar la
geometría del basamento en la cuenca de Zafarraya (Granada). Al tratarse de una cuenca
relativamente extensa y poco profunda y con un contraste de velocidades entre los sedimentos y
el basamento no extremadamente alto (2-3), las variaciones en el campo de ondas están
gobernadas por las respuestas 1D de cada punto y no por resonancias 2D y 3D. Ello permitió
realizar un ajuste entre la frecuencia del pico principal del cociente espectral y la profundidad del
basamento usando 17 puntos de la cuenca en los que se disponía de información geotécnica,
utilizando después esta relación para inferir la profundidad del basamento en una malla densa de
puntos en los que se determinó la frecuencia de resonancia. Esto permitió generar un modelo 3D
del basamento (Fig. 5.1.8). Adicionalmente, se obtuvieron relaciones exponenciales que
describen la variación de la velocidad de onda S con la profundidad para la cobertura
sedimentaria de la cuenca, asumiendo su homogeneidad lateral y variaciones suaves en vertical.
La que se considera más verosímil (Ec. 5.1.7) resulta, en los 50m más superficiales, similar a la
obtenida por Amico et al. (2008) en el área de Florencia.
A menor escala, se ha utilizado el método v-SPAC y la inversión conjunta a partir de la curva
de dispersión Rayleigh y del HVSR para explorar el subsuelo de la localidad de Mula (Murcia).
Combinando e interpretando los resultados a la luz de la información geotécnica se pudieron
obtener dos cortes geológicos superficiales a través del área urbana. Asimismo, se ha elaborado
un mapa de periodos predominantes de la localidad usando el HVSR que puede ser de utilidad en
futuros estudios de riesgo sísmico. Los periodos, que varían entre los 0.06s y 0.38s, están
distribuidos con cierta heterogeneidad.
- 232 -
Conclusiones y futuras líneas de trabajo.
Se testeó el método DR en un experimento realizado en el Campus de la Universidad de
Almería. El experimento permitió recuperar información del subsuelo hasta unos 60m de
profundidad usando un radio máximo de 35m e introduciendo muy poca información a priori en
la inversión. La profundidad de penetración estuvo limitada por el tipo de instrumentos usados
(acelerómetros) que arrojaron una pobre relación señal/ruido para frecuencias por debajo de 34Hz. La posición del contraste de velocidades de onda S más significativo en ese rango de
profundidades (identificado a 15m por Chávez-García and Luzón, 2005 mediante sondeos
mecánicos) fue recuperada con gran precisión, incluso parametrizando el modelo de una forma
simple (dos capas sobre un semiespacio). Pueden resaltarse dos observaciones interesantes sobre
la eficiencia del método DR:
i) Éste resultó ser más eficaz que el v-SPAC a frecuencias bajas, probablemente debido a la
mejor relación señal / ruido para las ondas Love.
ii) Dentro de las limitaciones debidas al desconocimiento del modelo real en todo su detalle, el
comportamiento de los coeficientes de DR a longitudes de onda cortas parece poder explicarse
considerando los efectos de número de estaciones finito (y, en menor medida, de ruido
incoherente) admitiendo proporciones de onda Rayleigh en la componente horizontal inferiores
al 50% (i. e. RLR<1). Esto abre las puertas a procedimientos de inversión más sofisticados en
que se consideren tales efectos.
El método SCA ha sido comprobado experimentalmente en el sitio Desaladora, situado en el
delta del río Andarax (Almería), cuya estratigrafía aproximada era conocida a partir de sondeos
mecánicos, eléctricos e inversión conjunta a partir de la curva de dispersión de onda Rayleigh y
del HVSR. Se usaron cinco arrays pentagonales (N=5) con radios entre 12 y 94m y se evaluó el
estimador BII, que permite una aplicación robusta del método. Si los efectos de N finito y del
ruido incoherente son ignorados, las velocidades de onda Love pueden obtenerse hasta alrededor
de x L = 1.84. Por otra parte, la formulación desarrollada en el Capítulo 3 permitió interpretar la
forma suave y oscilante de BIIexp ( f ) , hasta valores tan altos como xL = 11.7 (de media), como la
forma para campo isótropo más una cierta proporción de ruido incoherente, linealmente creciente
con la frecuencia.
Los test realizados en el sitio Desaladora confirman que la inversión conjunta de datos de onda
- 233 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Rayleigh y Love reducen significativamente las incertidumbres en el modelo invertido (respecto
al uso exclusivo de datos Rayleigh) contribuyendo especialmente a eliminar interdependencias
entre velocidades de ondas P y S.
En el experimento realizado en el sitio Desaladora y en la estación de banda ancha UALM se
ha encontrado un pico claro en el HVSR a frecuencia de ~0.35Hz que es interpretado como el
modo fundamental de resonancia 1D de un paquete sedimentario de potencia superior a 500m.
Un segundo pico es claramente identificable a 2.7-2.9 Hz. Éste es menos notable en el sitio
Desaladora y más pronunciado (incluso dominante) en la estación de la Universidad. La
confirmación de la existencia de la resonancia de baja frecuencia sugiere la posibilidad de
estudiar la estructura profunda del abanico aluvial del Andarax mediante ruido ambiental,
complementando la zonación obtenida por Navarro et al. (2001) basada en el pico de alta
frecuencia y que reflejaría la estructura más superficial.
6.2. FUTURAS LÍNEAS DE TRABAJO.
Como es inevitable, a lo largo de este trabajo han quedado muchas cuestiones abiertas.
Esquemáticamente se indican algunas de las que se podrían abordar a continuación:
Estudios posteriores sobre las técnicas DR y SCA:
i) Se debe estudiar su aplicabilidad bajo condiciones del campo más desfavorables, como
coexistencia de modos superiores de ondas superficiales y/o de ondas internas o en campos de
onda simulados dentro de estructuras 3D.
ii) Modelización de los efectos de los errores estocásticos en ̂ tgDR y B̂ II . Se trata de evaluar
teóricamente las incertidumbres debidas al empleo de un número finito de ventanas temporales
de duración finita. Un estudio de este tipo para el método v-SPAC puede encontrarse en el
trabajo de Cho et al. (2008).
iii) Completar el código híbrido de inversión para que trate directamente con los coeficientes DR
y SCA y considerando los efectos de N-finito en los cálculos directos (i. e. inversión de ̂ tgDR , B̂ II
y del RLR). También puede incluirse la inversión de la densidad espectral de ruido incoherente.
- 234 -
Conclusiones y futuras líneas de trabajo.
iv) Estudio de los efectos de la atenuación inelástica en los coeficientes DR y SCA.
En el apartado de aplicaciones, sería interesante:
i) Realizar un nuevo estudio en la cuenca de Zafarraya usando técnicas tipo SPAC, gravimétricas
y eléctricas que permita validar o mejorar la información sobre la estructura obtenida aquí
(trabajo actualmente en progreso).
ii) Realizar mediciones de HVSR cubriendo densamente la zona del Bajo Andarax con el
objetivo de mapear la variación espacial y espectral del pico de baja frecuencia ~0.35Hz
detectado en el entorno de la desembocadura (sitios Desaladora y Universidad).
Evolucionar los programas de inversión híbrida para permitir otras combinaciones de métodos
(p. e. inclusión de algoritmos genéticos y técnicas Monte Carlo más avanzadas)
Profundizar en el estudio de la aplicabilidad de los métodos tipo SPAC fuera del contexto de
campos aleatorios estacionarios (p e. en la interpretación y utilidad de la proporción de ondas
Rayleigh compleja ' ( ) en el método 3c-SPAC).
- 235 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
- 236 -
REFERENCIAS
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Abeki N., R. S. Punongbayan, D. C. Garcia, I. C. Narag, B. C. Bautista, M. L. P. Bautista, E. L.
Banganan, R. A. Tabanlar, D. S. Soneja, K. Masaki, N. Maeda and K. Watanabe, (1996).
Site response evaluation of metro Manila using microtremor observation. Proceedings of
the 11th World Conference on Earthquake Engineering. Acapulco, Mexico.
Aki, K. (1957). Space and time spectra of stationary stochastic waves, with special reference to
microtremors, Bulletin of the Earthquake Research Institute 35, 415-456.
Aki, K. (1965). A note on the use of microseisms in determining the shallow structures of the
earth's crust, Geophysics 30, 665-666.
Aki, K. and Larner, K. L. (1970). Surface motion of a layered medium having an irregular
interface due to incident plane SH waves, J. Geoph. Res., 75, 933-954.
Alfaro A. J., B. M. Navarro, F. J. Sanchez and L. Pujades, (1997). Microzonificación sísmica de
Barcelona utilizando el método de Nakamura; ventajas y limitaciones (In Spanish). XII
Jornadas Estructurales de la Ingeniería de Colombia. Bogotá, 10-13 Septiembre 1997,
pp. 198-220.
Alfaro A., L. Pujades, X. Goula, T. Susagna, B. M. Navarro, F. J. Sanchez and J. A. Canas,
(2001). Preliminary map of soil's predominant periods in Barcelona using microtremors.
Pure and Applied Geophysics 158(12), 2499-2511.
Al Yuncha, Z., Luzón, F., Posadas, A., Martín, J., Alguacil, G., Almendros, J., and Sánchez, S.
(2004). The use of ambient seismic noise measurements for estimation of surface soil
effects: The Motril City case (Southern Spain), Pure Appl. Geophys. 161, 1549-1559.
Alcalá-García FJ, Espinosa J, Navarro M, Sánchez FJ (2002). Propuesta de división geológica de
la localidad de Adra (provincia de Almería). Aplicación a la zonación sísmica. Revista de
la Sociedad Geológica de España, 15(1-2), 55-65.
Alcalá FJ, Navarro M, Enomoto T, Vidal F. (2004). Evaluación preliminar de la peligrosidad
sísmica en la ciudad de Mula (Murcia, España) a partir de datos geotécnicos. In:
Proceedings de la IV Assembleia Luso-Espanhola de Geodesia e Geofísica, 2004. Vol I,
pp 341-342.
Almendros, J., Luzón, F., and Posadas, A. (2004). Microtremors Analysis at Teide Volcano
(Canary Islands, Spain): Assessment of Natural Frequencies of Vibration Using Timedependent Horizontal-to-vertical Spectral Ratios, Pure Appl. Geophys. 161, 1579-1596.
Alterman, Z. and Karal, F. C. (1968). Propagation of elastic waves in layered media by finite
difference methods. Bull. Seism. Soc. Am., 58, 367-398.
Ansal A., R. Iyisan and H. Güllü, (2001). Microtremor measurements for the microzonation of
Dinar. Pure and Applied Geophysics, 158(12), 2525-2541.
- 238 -
Referencias.
Arai, H., and Tokimatsu, K. (2000). Effects of Rayleigh and Love waves on microtremor H/V
spectra, 12th World Conf. on Earthquake Engineering, paper 2232.
Arai, H., and Tokimatsu, K. (2004). S-wave velocity profiling by inversion of microtremor H/V
spectrum, Bull. Seism. Soc. Am. 94, 53-63.
Arai, H., Tokimatsu, K., (2005). S-Wave Velocity Profiling by Joint Inversion of Microtremor
Dispersión Curve and Horizontal-to-Vertical (H/V) Spectrum. Bull. Seism. Soc. Am.
95(5), 1766-1778.
Asten, M.W., (1978). Geological control of the three-component spectra of Rayleigh-wave
microseisms. Bull. Seism. Soc. Am. 68(6), 1623–1636.
Asten, M.W., Henstridge, J.D., (1984). Arrays estimators and the use of microseisms for
reconnaissance of sedimentary basins. Geophysics 49(11), 1828–1837.
Asten, M. (2006). On bias and noise in passive seismic data from finite circular array data
processed using SPAC methods, Geophysics 71, 153-162.
Backus, G. and Gilbert, F. (1970). Uniqueness in the inversion of inaccurate gross Earth data.
Philos. Trans. Royal Soc. London 266, 123-192.
Baptie B. J. (2010). Lava dome collapse detected using passive seismic interferometry
Geophysical Research Letters 37, L00E10, doi:10.1029/2010GL042489
Bard, P.Y. (1999). Microtremor Measurements: A Tool for Site Effect Estimation?, In: Irikura,
K., Kudo, K. Okada, H. Satasini, T. (Eds.), The Effects of Surface Geology on Seismic
Motion. Balkema, Rotterdam, vol. 3, pp. 1251-1279.
Bard, P.Y., and Bouchon, M. (1985). The two-dimensional resonance of sediment-filled valleys,
Bull. Seism. Soc. Am. 75(2), 519–541.
Behr, Y., J. Townend, S. Bannister, and M. K. Savage (2010). Shear velocity structure of the
Northland Peninsula, New Zealand, inferred from ambient noise correlations, J. Geophys.
Res. 115, B05309, doi:10.1029/2009JB006737.
Benito and Jiménez (1999). Peligrosidad sísmica, Física de la Tierra 11, 13-47.
Bensen, G. D., M. H. Ritzwoller, M. P. Barmin, A. L. Levshin, F. Lin, M. P. Moschetti, N. M.
Shapiro and Y. Yang (2007). Processing seismic ambient noise data to obtain reliable
broad-band surface wave dispersion measurements. Geophys. J. Int. 169(3), 1239-1260.
Bettig, B., P.-Y. Bard, F. Scherbaum, J. Riepl, F. Cotton, C. Cornou, and D. Hatzfeld (2001).
Analysis of dense array noise measurements using the modified spatial auto-correlation
method (SPAC): application to the Grenoble area, Boll. Geof. Teor. Appl. 42, 281-304.
Binder K. and Heermann D.W. (2002). Monte Carlo simulation in Statistical Physics: an
- 239 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
introduction. 4th Ed. Springer. Berlin.
Bodin, P., K. Smith, S. Horton y H. Hwang (2001). Microtremor observations of deep sediment
resonance in metropolitan Memphis, Tennessee, Engineering Geology 62, 159-168.
Bokelmann, G. H. R., and S. Baisch (1999). Nature of narrow-band signals at 2.083 Hz, Bull.
Seism. Soc. Am. 89(1), 156–164.
Bonilla, L.F., J.H. Steidl, G.T. Lindley, A.G. Tumarkin, y R. Archuleta (1997). Site
amplification in the San Fernando valley, California: variability of site-effect estimation
using the S-wave, coda, and H/V methods, Bull. Seism. Soc. Am. 87, 710-730.
Bonnefoy-Claudet, S. (2004) Nature du bruit de fond sismique: implications pour les études des
effets de site. PhD Thesis. Joseph Fourier University, Grenoble, France, 216 pp. (in
French).
Bonnefoy-Claudet, S., Cornou, C., Bard, P-Y., Cotton, F., Moczo, P., Kristek, J. and Fäh, D.
(2006a) H/V ratio: a tool for site effects evaluation. Results from 1-D noise simulations.
Geophys. J. Int. 167, 827-837.
Bonnefoy-Claudet, S., F. Cotton, P.-Y. Bard (2006b). The nature of noise wavefield and its
applications for site effects studies. A literature review, Earth-Science Reviews 79, 205227.
Bonnefoy-Claudet, S., A. Köhler, C. Cornou, M. Wathelet, and P.-Y. Bard (2008). Effects of
Love Waves on Microtremor H/V Ratio. Bull. Seism. Soc. Am. 98, 288 - 300.
Boore, D. M. (1972). Finite difference methods for seismic wave propagation in heterogeneous
materials.In Methods in Computational Physics, 11, (Ed. B. A. Bolt), Academic Press,
New York.
Borcherdt, R.D. (1970). Effects of local geology on ground motion near San Francisco Bay, Bull.
Seism. Soc. Am. 60, 29-61.
Borcherdt R.D. y J.F. Gibbs (1976). Effects of local geological conditions in the San Francisco
Bay region on ground motion and the intensities of the 1906 earthquake, Bull. Seism. Soc.
Am. 66, 467-500.
Borcherdt, R.D., Glassmoyer, G., Andrews, M. and Cranswick, E. (1989). Effects of site
conditions on ground motion and damage, Earthquake Spectra (Special supplement).
Armenia Earthquake Reconnaissance report. (Eds. Wyllie L.A. and Filson J.R.), 23-42.
Borcherdt, R.D., (1990). Influence of local geology in the San Francisco Bay region, California
on ground motions generated by Loma Prieta earthquake of October 17, 1989. Int. Symp.
on Safety of Urban Life and Facilities. Lessons learned from the 1989 Loma Prieta
Earthquake. November 1990, Tokyo, 1-35.
- 240 -
Referencias.
Brenguier F, Shapiro NM, Campillo M, Nercessian A, Ferrazzini V (2007). 3-D surface wave
tomography of the Pitón de la Fournaise volcano using seismic noise correlations,
Geophysical Research Letters, 34(2), L02305.
Brenguier, F., Shapiro, N. M., Campillo, M., Ferrazzini, V., Duputel, Z., Coutant, O. and
Nercessian, A. (2008). Towards forecasting volcanic eruptions using seismic noise, Nature
Geoscience 1, 126 – 130.
Budny, M. (1984). Seismische Bestimmung der bodendynamischen Kennwerte von
oberfläschennahen Schichten in Erdbebengebieten der Niederrheinnischen Bucht und ihre
ingenieurseismologische Anwendung, Geol. Inst. Univ. Cologne, special issue 57.
Buforn E, Benito B, Sanz de Galdeano C, del Fresno C, Muñoz D, Rodriguez I. (2005) Study of
the Damaging Earthquakes of 1911, 1999, and 2002 in the Murcia, Southeastern, Region:
Seismotectonic and Seismic-Risk Implications. Bull. Seism. Soc. Am. 95(2), 549-567.
Campillo, M., and A. Paul (2003). Long range correlations in the seismic coda, Science 299,
547-549.
Capon, J. (1969). High-resolution frequency-wavenumber spectrum analysis, Proceedings IEEE
57(8), 1408-1418.
Carrasco, A. y Martín, G. (1988). Hidrogeología de los acuíferos del valle del Andarax
(Almería). TIAC'88, Vol. 2, 37-67. Almuñecar (Granada).
Chávez-García, F.J., G. Pedotti, D. Hatzfeld y P.-Y. Bard (1990). An experimental study of site
effects near Thessaloniki (Northern Greece), Bull. Seism. Soc. Am. 80, 784-806.
Chávez-García, F.J., Luzón, F., (2005). On the correlation of the seismic microtremors. J.
Geophys. Res. 110, doi: 10.1029/2005JB003671.
Chávez-García, F.J., Rodríguez, M., Stephenson, W.R., (2005). An Alternative Approach to the
SPAC Analysis of Microtremors: Exploiting Stationarity of Noise. Bull. Seism. Soc. Am.
95(1), 277-293.
Cho I, Tada T, Shinozaki Y. (2004). A new method to determine phase velocities of Rayleigh
waves from microseisms. Geophysics 69(6), 1535-1551.
Cho, I., Tada, T. & Shinozaki, Y., (2006a). Centerless circular array method: Inferring phase
velocities of Rayleigh waves in broad wavelength ranges using microtremor records, J.
Geophys. Res. 111, B09315, doi:10.1029/2005JB004235.
Cho, I., Tada, T. & Shinozaki, Y. (2006b). A generic formulation for microtremor exploration
methods using three-component records from a circular array, Geophys. J. Int. 165, 236258.
- 241 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Cho, I., T. Tada, and Y. Shinozaki, (2008). Assessing the applicability of the spatial
autocorrelation method: A theoretical approach, J. Geophys. Res. 113, B06307,
doi:10.1029/2007JB005245.
Cho, K.H., Hermann, R.B., Ammon, C.J., Lee, K., (2007). Imaging the upper crust of the Korean
Peninsula by surface-wave tomography, Bull. Seism. Soc, Am. 97, 198-207.
Chouet, B., G. De Luca, G. Milana, P. Dawson, M. Martini, and R. Scarpa (1998). Shallow
velocity structure of Stromboli Volcano, Italy, derived from small-aperture array
measurements of Strombolian tremor. Bull. Seismol. Soc. Am. 88, 653–666.
Cornou, C. (1998). Etudes théoriques et numériques sur la méthode de Nakamura-Nogoshi,
Mémoire de diplôme d’Ingénieur, EOST. Strasbourg, LGIT, Grenoble, 172 pp.
Cornou, C. (2002). Traitement d'antenne et imagerie sismique dans l'agglomération grenobloise
(Alpes françaises): implications pour les effets de site. Ph.D. Thesis, University Joseph
Fourier, Grenoble, France. (In French with English abstract).
Cornou, C., P.-Y. Bard, M. Dietrich, (2003). Contribution of dense array analysis to the
identification and quantification of basin-edge-induced waves, part I : methodology, Bull.
Seism. Soc. Am., 93, 2604-2623.
D’Amico, V., Picozzi, M., Baliva, F., Albarello, D. (2008). Ambient noise measurements for
preliminary site-effects characterization in the urban area of Florence. Bull. Seism. Soc.
Am. 98(3), 1373-1388.
Dal Moro, G., M. Pipan and P. Gabrielli (2007). Rayleigh wave dispersion curve inversion via
genetic algorithms and Marginal Posterior Probability Density estimation. Journal of
Applied Geophysics 61, 39–55.
Delgado, J., López-Casado, C., Estévez, A. C., Giner, J., Cuenca, A., and Molina, S. (2000a).
Mapping soft soils in the Segura river valley (SE Spain): a case study of microtremors as
an exploration tool, J. Appl. Geophys. 45, 19-32.
Delgado, J., López Casado, C., Giner, J., Estévez, A. C., Cuenca, A., and Molina, S. (2000b).
Microtremors as a geophysical exploration tool: applications and limitations, Pure Appl.
Geophys. 157, 1445-1462.
Di Giulio, G., C. Cornou, M. Ohrnberger, M. Wathelet and A. Rovelli (2006). Deriving
Wavefield Characteristics and Shear-Velocity Profiles from Two- Dimensional SmallAperture Arrays Analysis of Ambient Vibrations in a Small-Size Alluvial Basin,
Colfiorito, Italy. Bull. Seism. Soc. Am. 96, 1915-1933.
Díaz, J., Villaseñor, A., Morales, J., Pazos, A., Córdoba, D., Pulgar, J., García-Lobón, J. L.,
Harnafi, M., Carbonell, R., Gallart, J., and TopoIberia Seismic Working Group (2010)
- 242 -
Referencias.
Background Noise Characteristics at the IberArray Broadband Seismic Network. Bull.
Seism. Soc. Am. 100, 618–628.
Draganov, D., Wapenaar, K. and Thorbecke J. (2006) Seismic interferometry: Reconstructing
the earth's reflection response. Geophysics 71, 61-70.
Duputel Z, Cara M, Rivera L, Herquel G (2010). Improving the analysis and inversion of
multimode Rayleigh-wave dispersion by using group-delay time information observed on
arrays of high-frequency sensors. Geophysics 75(2), R13-R20.
Duvall, T. L., S. M. Jefferies, J. W. Harvey, and M. A. Pomerantz (1993), Time-distance
helioseismology, Nature 362, 430- 432.
Dziewonski, A., S. Bloch y K. Landisman (1969). A technique for the analysis of transient
seismic signal, Bull. Seism. Soc. Am. 59, 427-444.
Egeler CG, Simon OJ. (1969) Sur la tectonique de la Zone bétique (Cordillères bétiques,
Espagne). Koninklijke Nederlandse Akademic Wetenschappen Vol 25, 90 pp.
Endrun, B. (2010). Love wave contribution to the ambient vibration H/V amplitude peak
observed by array measurements, Journal of Seismology, in press.
Endrun, B., and M. Ohrnberger (2009) Array observations of a significant Love wave
contribution to the ambient vibration H/V ratio, Mitteilungen Deutsche Geophysikalische
Gesellschaft 2/2009, 43-44.
Fäh D., T. Noack, P. Kruspan and E. Rüttener, (1996). Microzonation of the city of Basel
(Switzerland) based on numerical simulations and in-situ measurements. Proceedings of
the 11th World Conference on Earthquake Engineering. Acapulco, Mexico.
Fäh D., (1997). Microzonation of the city of Basel. Journal of Seismology 1(1), 87-102.
Fäh D, Kind F, Giardini D. (2003). Inversion of local S-wave velocity structures from average
H/V ratios, and their use for the estimation of site-effects. Journal of Seismology 7, 449467.
Fäh, D., Stamm G. and Havenith, H-B. (2008) Analysis of three-component ambient vibration
array measurements. Geophys. J. Int., 172(1), 199-213.
Ferrazzini, V., K. Aki, and B. Chouet (1991). Characteristics of seismic waves composing
Hawaiian volcanic tremor and gas-piston events observed by a near-source array. J.
Geophys. Res. 96, 6199–6209.
Field. E.H. y K.H. Jacob (1995). A comparison and test of various site-response estimation
techniques, including three that are not reference-site dependent, Bull. Seism. Soc. Am.
85, 1127-1143.
- 243 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Flores-Estrella, H., Aguirre-González, J., (2003). SPAC: An Alternative Method to Estimate
Earthquake Site Effects in Mexico City, Geofí. Int. 42(2), 227-236.
Frankel, A., D. Carver, E. Cranswick, T. Bice, R. Sell y S. Hanson (2001). Observations of basin
ground motions from a dense seismic array in San Jose, California, Bull. Seism. Soc. Am.
91, 1-12.
Gallagher, K., Charvin, Nielsen, S., Sambridge, M., and Stephenson, J., (2009). Markov chain
Monte Carlo (MCMC) sampling methods to determine optimal models, model resolution
and model choice for Earth Science problems, Marine and Petrol. Geol. 26, 525-535,
doi:10.1016/j.marpetgeo.2009.01.003.
García-Hernández M, López-Garrido AC, Rivas SP, Sanz de Galdeano C, Vera JA. (1980).
Mesozoic paleogeographic evolution of the External Zone of the Betic Cordillera.
Geologie in Mijnbouw 59, 155-168.
García-Jerez, A., M. Navarro and F. Luzón (2004) Comparison Between Microtremor H / V
Spectral Ratio and theoretical results by using a surface wave scheme. Proceedings XXIX
General Assembly of the European Seismological Commission. September 2004.
Potsdam, Germany.
García-Jerez A, Luzón F, Navarro M, Pérez-Ruíz JA. (2006a) Characterization of the
sedimentary cover of the Zafarraya basin (Southern Spain) by means of ambient noise.
Bull. Seismol. Soc. Am. 96, 957-967.
García-Jerez, A., F. Luzón, and M. Navarro (2006b). Computation of dispersion curves for
Rayleigh and Love waves using horizontal components of seismic microtremor, in Proc.
8th U.S. National Conference on Earthquake Engineering, San Francisco, USA, April
2006, paper N. 1377.
García-Jerez, A., F. Luzón and M. Navarro (2006c) Cálculo de características de las ondas
superficiales usando ruido ambiental mediante medidas de array de tres componentes.
Memorias de la V Asamblea Hispano Portuguesa de Geodesia y Geofísica. Sevilla, Spain.
García-Jerez, A., Navarro, M., Alcalá, F. J., Luzón, F., Pérez-Ruíz, J. A., Enomoto, T., Vidal, F. y
Ocaña, E. (2007) Shallow velocity structure using joint inversion of array and H/V
spectral ratio of ambient noise: the case of Mula town (SE of Spain). Soil Dynamics and
Earthquake Engineering 27, 907-919.
García-Jerez, A., F. Luzón, M. Navarro, and J. A. Pérez-Ruiz (2008a). Determination of elastic
properties of shallow sedimentary deposits applying a spatial autocorrelation method,
Geomorphology 93, 74-88.
García-Jerez, A., F. Luzón, and M. Navarro (2008b). An alternative method for calculation of
- 244 -
Referencias.
Rayleigh and Love wave phase velocities by using three-component records on a single
circular array without a central station, Geophys. J. Int. 173(3), 844-858.
García-Jerez, A., Luzón, F., Navarro, M., Santoyo, M. A. (2010) Assessing the Reliability of the
Single Circular Array Method for Love-Wave Ambient-Noise Surveying. Bull. Seismol.
Soc. Am. 100(5), en prensa.
Gaull B. A., H. Kagami, M. EERI and H. Taniguchi, 1995. The microzonation of Perth, western
Australia, using microtremor spectral ratio. Earthquake Spectra 11(2), 173-191.
Goldberg, D. E. (1989). Genetic Algorithms in Search, Optimization, and Machine Learning,
Addison-Wesley, Reading, Mass.
Goncalves, D. (1999). Traitement d’antenne et matrice spectrale large bande, Ph.D. Thesis,
Institut National Polytechnique de Grenoble, France, 148 pp. (en Francés).
Gucunski, N., 1993, Alternative inversion procedures for surface wave testing, in Geophysical
Techniques for Site and Material Characterization, NSF Earthquake Hazard Mitigation
Program, G.J. Rix and J.C. Santamarina, editors, Georgia Institute of Technology, 205208.
Gudmundsson, Ó., A. Khan, and P. Voss (2007), Rayleigh-wave group-velocity of the Icelandic
crust from correlation of ambient seismic noise, Geophys. Res. Lett. 34, L14314,
doi:10.1029/2007GL030215.
Guéguen P., J.-L. Chatelain, B. Guillier, H. Yepes and J. Egred, (1998). Site effect and damage
distribution in Pujili (Ecuador) after the 28 march 1996 earthquake. Soil Dynamics and
Earthquake Engineering, 17(5), 329-334.
Gutenberg, B. (1911). Die seismische bodenunruhe. Ph.D. thesis University of Gottigen,
Germany. (In German).
Gutenberg, B. (1958). Microseisms. Advances in Geophysics 5, 53-92.
Hanyga, A., Lenartiwicz, E. and Pajchel, J. (1985). Physics and evolution of the Earth’s interior
2. Seismic wave propagation in the Earth, R. Teisseyre (Series Ed.), A. Hanyga (2
Volume Ed.), Elsevier Science Pub. Co., Inc. New York.
Hardin, B. O., and Drnevich, V. P. (1972). Shear modulus and damping in soils: design
equations and curves, Journal of Soil Mechanics and Foundation Division (ASCE) 98,
667-692.
Harkrider, D. G. (1963). Rayleigh and Love waves from sources in a multilayered elastic halfspace, Ph.D. thesis, California Institute of Technology, Pasadena, Calif.
Harkrider, D. G. (1964). Surface waves in multilayered elastic media. Part 1, Bull. Seism. Soc.
- 245 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Am. 54, 627-679.
Haskell, N. A. (1953). The dispersion of surface waves on multilayered media, Bull. Seism. Soc.
Am. 43, 17-34.
Hasselmann, K. (1963). A statistical analysis of the generation of microseisms. Rev. Geophys. 1,
177–210.
Hastings, W. K., (1970). Monte Carlo sampling methods using Markov Chain and their
applications. Biometrika 57, 97–109.
Henstridge, J. D. (1979). A signal processing method for circular arrays, Geophysics 44, 179184.
Herak, M. (2008). ModelHVSR - A Matlab® Tool to Model Horizontal-to-Vertical Spectral
Ratio of Ambient Noise. Computers & Geosciences 34, 1514–1526.
Herrin, E., and T. Goforth (1977). Phase-match filters: application to the study of Rayleigh
waves, Bull. Seism. Soc. Am. 67, 1259-1275.
Herrmann, R.B. (1987). Computer programs in Seismology. Saint Louis University, 7 vols.
Holland, J. H. (1975). Adaptation in Natural and Artificial Systems. Univ. of Mich. Press, Ann
Arbor, Mich.
Howard, R. M. (2002). Principles of random signal analysis and low noise design, John Wiley &
Sons, New York, 105 pp.
Ibs-von Seht, M., and Wohlenberg, J. (1999). Microtremor measurements used to map thickness
of soft sediments, Bull. Seism. Soc. Am. 89, 250-259.
IGME-IRYDA (1977). Estudio hidrogeológico de la cuenca sur Almería, Instituto Geológico y
Minero de España, Madrid, VI.12-VI.14.
IGME (1973). Informe del sondeo S.5A, realizado dentro de la fase de investigación del estudio
hidrogeológico de la cuenca del rio Andarax.
Imai T. (1981) P- and S- wave velocities of the ground in Japan. In: Proceedings of the 9th
International Conference of Soil Mechanics and Foundation Engineering. Tokyo, 1981,
Vol II, 257-260.
Jackson, P. S. (1971). The focusing earthquakes. Bull. Seism. Soc. Am. 61, 685-695.
Jiménez, A., García J. M. and Romacho M. D. (2005). Simultaneous inversion of source
parameters and attenuation factor using genetic algorithms. Bull. Seism. Soc. Am. 95,
1401-1411.
Jongmans, D. and D. Demanet (1993). The importance of surface waves in vibration study and
the use of Rayleigh waves for determining the dynamic characteristics of soils,
Engineering Geology 34, 105-113.
- 246 -
Referencias.
Jongmans D., Ohrnberger, M., Wathelet, M., (2005). Recommendations for quality array
measurements and processing. Final Report of the SESAME project, WP13.
Kagawa, T. (1996). Estimation of velocity structures beneath Mexico City using microtremor
array data, in 10th World Conference on Earthquake Engineering, Acapulco, Mexico,
Paper No. 1179, Elseiver Science, Amsterdam, CD-ROM.
Kelly, K. R., Ward, R. W., Treitel, S. and Alford, R. M. (1976). Synthetic seismograms: A finitedifference approach. Geophysics, 41, 2-27.
Kind, F., Fäh, D., and Giardini, D. (2005). Array measurements of S-wave velocities from
ambient vibrations, Geophys. J. Int. 160, 114-126.
Kitsunezaki, C., Goto, N., Kobayashi, Y., Ikawa, T., Horike, M., Saito, T., Kurota, T., Yamane,
K. and Okuzumi, K. (1990). Estimation of P- and S- wave velocities in deep soil deposits
for evaluating ground vibrations in earthquake. Japan Society for Natural Disaster
Science 9(3), 1-17.
Köhler, A., Ohrnberger, M., Scherbaum, F., Wathelet, M. & Cornou, C. (2007). Assessing the
reliability of the modified three-component spatial autocorrelation technique, Geophys. J.
Int., 168(2), 779-796.
Kokusho T (1987). In-situ Dynamic Soil Properties and Their evaluation. In: Proceedings of the
8th Asian Regional Conference of Soil Mechanics and Foundation Engineering. Kyoto,
1987, Vol II, pp 215-240.
Konno, K., and Ohmachi, T. (1998). Ground-Motion Characteristics Estimated from Spectral
Ratio between Horizontal and Vertical Components of Microtremor, Bull. Seism. Soc.
Am. 88, 228-241.
Kosloff, R. and Baysal, E. (1982). Forward modeling by a Fourier method. Geophysics 52, 14021412.
Koper, K. D., Seats, K. and Benz, H. (2010).On the Composition of Earth’s Short-Period
Seismic Noise Field. Bull. Seism. Soc. Am. 100(2), 606–617.
Kramer, S. L. (1996). Geotechnical Earthquake Engineering (Ed. Prentice Hall) New Jersey.
Kunimatsu, S. , M. Yoshimi , H. Sekiguchi , H. Horikawa , H. Saomoto , S. K. Feng, and T.
Sugiyama (2005). Estimation of subsurface velocity structure under Yufutsu plain by
using microtremor array survey, Annu. Rept. Active Fault Paleoearthquake Res. 5,1 -15.
Kvaerna T. and F. Ringdahl, (1986). Stability of various fk-estimation techniques, in Semiannual
Technical
Summary,
1
October
1985
-
In NORSAR Scientific Report, 1-86/87, Kjeller, Norway, 29-40.
- 247 -
31
March
1986.
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Lachet, C., and Bard, P.Y. (1994). Numerical and Theoretical Investigations on the Possibilities
and Limitations of Nakamura`s Technique, J. Phys. Earth 42, 377-397.
Lacoss, R.T., Kelly, E.J., Nafi, T.M., 1969. Estimation of seismic noise structure using arrays.
Geophysics 34(1), 21–38.
Langston, C.A. (1979). Structure under Mount Rainier, Washington, inferred from teleseismic
body waves, J. Geophys. Res. 84, 4749-4762.
Langston, C.A., Chiu S.C.C., Lawrence Z., Bodin P., Horton S. (2009) Array observations of
microseismic noise and the nature of H/V in the Mississippi embayment. Bull. Seismol.
Soc. Am. 99(5), 2893-2911. doi:10.1785/0120080189
Lee V. W. (1984). Three-dimensional diffraction of plane P, SV SH waves by a hemispherical
alluvial valley. Soil Dyn. Earthq. Engrg., 3, 133-144.
Lermo, J.F. y F.J. Chávez-García (1993). Site effect evaluation using spectral ratios with only
one station, Bull. Seism. Soc. Am. 83, 1574-1594.
Lermo, J., and Chávez-García, F. J. (1994). Are microtremors useful in the site response
evaluation?, Bull. Seism. Soc. Am. 84, 1350-1364.
Li H., Su W., Wang C.-Y., Huang Z. and Lv Z. (2010). Ambient noise Love wave tomography in
the eastern margin of the Tibetan plateau, Tectonophysics, In press. doi:
10.1016/j.tecto.2009.12.018.
Li, H., W. Su and C. Wang (2009), Ambient noise Rayleigh wave tomography in western
Sichuan and eastern Tibet, Earth Planet. Sci. Lett. 282, 201-211.
Liang C., C. A. Langston (2008), Ambient seismic noise tomography and structure of eastern
North America, J. Geophys. Res. 113, B03309, doi:10.1029/2007JB005350.
Lin, F.C, Ritzwoller, M.H., Townend, J., Savage, M., Bannister, S. (2007). Ambient noise
Rayleigh wave tomography of New Zealand, Geophys. J. Int., 172(2), 649-666.
doi:10.1111/j.1365-246X.2007.03414.x
Lin, F.-C., Moschetti, M. P., Ritzwoller, M. H. (2008) Surface wave tomography of the western
United States from ambient seismic noise: Rayleigh and Love wave phase velocity maps,
Geophys. J. Int. 173(1), 281-298 doi:10.1111/j.1365-246X.2008.03720.x.
Lobkis, O. I. and Weaver R. L. (2001). On the emergence of the Green's function in the
correlations of a diffuse field, Journal of the Acoustical Society of America 110(6), 30113017.
Loh, C.H. y T.C. Wu (1998). Prediction on site effects from seismic motions, en K. Irikura, K.
Kudo, H. Okada y T. Sasatani (eds.) The effects of surface geology on seismic motion,
A.A. Balkema, Rotterdam, 2, 567-574.
- 248 -
Referencias.
Longuet-Higgins, M.S., (1950). A theory of the origin of microseisms. Philosophical
Transactions of the Royal Society of London. A 243(a), 1–35.
López Casado C., Sanz de Galdeano C., Molina Palacios S., Henares Romero J. (2001). The
structure of the Alboran Sea: an interpretation from seismological and geological data.
Tectonophysics, 338(2), 79-95.
López-Chicano, M. (1989). Geometría y estructura de un acuífero kárstico perimediterráneo:
Sierra Gorda (Granada y Málaga). Degree thesis, University of Granada, Spain (in
Spanish).
López-Chicano, M. (1992). Contribución al conocimiento del sistema hidrogeológico kárstico de
Sierra Gorda y su entorno (Granada y Málaga) PhD thesis, University of Granada, Spain
(in Spanish).
López-Chicano, M., Calvache, M. L., Martín-Rosales, W., and Gisbert, J. (2002). Conditioning
factors in flooding of karstic poljes-the case of the Zafarraya polje (South Spain), Catena
49, 331- 352.
Louie, J. N. (2001). Faster, better: Shear-wave velocity to 100 meters depth from refraction
microtremor arrays, Bull. Seismol. Soc. Am. 91, 347-364.
Luzón, F. (1995). Determinación de la respuesta sísmica de estructuras geológicas superficiales
mediante el método indirecto de elementos en la frontera, PhD thesis, University of
Granada, Spain (in Spanish).
Luzón, F., Aoi, S., Fäh, D., Sánchez-Sesma, F.J. (1995). Simulation of the seismic response of a
2D sedimentary basin: A comparison between the Indirect Boundary Element Method
and a Hybrid Technique. Bull. Seism. Soc. Am. 85, 1501-1506.
Luzón, F., Gil-Zepeda, S. A., Sánchez-Sesma, F. J., and Ortiz-Alemán, C. (2004). Threedimensional simulation of ground motion in the Zafarraya basin (Southern Spain) up to
1.335 Hz under incident plane waves, Geophys. J. Int. 156, 584-594.
Luzón, F., Almendros, J., García-Jerez A. (2010), Shallow structure of Deception Island volcano,
Antarctica, from correlations of ambient seismic noise on a dense set of seismic arrays.
Geophysical Journal International. Submitted.
Malischewsky, P. G. and F. Scherbaum (2004). Love's formula and H/V-ratio (ellipticity) of
Rayleigh waves, Wave Motion 40, 57-67.
Margaryan, S., Yokoi, T. and Hayashi K. (2009). Experiments on the stability of the spatial
autocorrelation method (SPAC) and linear array methods and on the imaginary part of the
SPAC coefficients as an indicator of data quality. Exploration Geophysics 40, 121–131.
- 249 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Martín-Martín M, El Mamoune B, Martín-Algarra A, Martín-Pérez JA, Serra-Kiel J. (1996). The
Internal zone Boundary in the eastern Betic Cordillera, SE Spain: Discussion. Journal of
Structural Geology 18(4), 523-524.
Martín-Vivaldi, J. L., Caballero, M. A., Calle, M., and Lhenaff, R. (1971). Estudio mineralógico
de los niveles arcillosos del polje de Zafarraya, Granada (España), Estudios Geológicos
XXVII, 137-144 (in Spanish).
Martinez, M. D., X. Lana, J. Olarte, J. Badal, and J. A. Canas (2000). Inversion of Rayleigh
wave phase and group velocities by simulated annealing. Physics of the Earth and
Planetary Interiors 122, 3-17.
McDonough R. N., and A.D. Whalen (1995). Detection of signals in noise. Academic Press, 2nd
Ed.
Métaxian, J-P. and Lesage, P. J., (1997). Permanent tremor of Masaya Volcano, Nicaragua:
Wave field analysis and source location, J. Geophys. Res. 102, 22529-22545.
Metropolis, N., M. N. Rosenbluth, A. W. Rosenbluth, A. H. Teller, and E. Teller, (1953).
Equation of state calculations by fast computing machines, J. Chem. Phys. 21, 1087–
1092.
Michaels, P. and R. B. Smith (1997). SurfaceWave Inversion by Neural Networks (Radial Basis
Functions) for Engineering Applications. The Journal of Environmental and Engineering
Geophysics 2, 65-76.
Miyadera, Y. and K., Tokimatsu (1992). Sampling of surface waves in short period
microtremors. Proc. Ann. Meet. JSSMFE, 965-966 (in Japanese).
Morales, J. (1991). Caracterización de la respuesta sísmica local de las cuenca de Granada
(España) y Ciudad de Guzmán (México) mediante el análisis espectral de
microterremotos y terremotos, PhD thesis, University of Granada, Spain (in Spanish).
Morales, J., Vidal, F., Peña, J. A., Alguacil, G., and Ibáñez, J. (1991). Microtremor study in the
sediment filled basin of Zafarraya, Granada (Southern Spain). Bull. Seism. Soc. Am. 81,
687-693.
Morikawa, H., (2006). A method to estimate phase velocities of surface waves using array
observations records of three-component microtremors. Structural Eng. / Earthquake
Eng. JSCE 23, 143s-148s.
Morikawa, H., S. Sawada, and J. Akamatsu (2004). A method to estimate phase velocities of
Rayleigh waves using microseism simultaneously observed at two sites, Bull. Seismol.
Soc. Am. 94, 961-976.
Morikawa H. and Udagawa S. (2009). A Method to Estimate the Phase Velocities of
- 250 -
Referencias.
Microtremors
Using
a
Time-Frequency
Analysis
and
Its
Applications
Bull. Seismol. Soc. Am. 99, 774 - 793.
Moschetti, M.P., M.H. Ritzwoller, and N.M. Shapiro, (2007). Surface wave tomography of the
western United States from ambient seismic noise: Rayleigh wave group velocity maps,
Geochem., Geophys., Geosys. 8, Q08010, doi:10.1029/2007GC001655.
Mota, L. (1954). Determination of dips and depths of geological layers by the seismic refraction
method, Geophysics 19, 242-254.
Murphy J.R. and Shah H.K. (1988). An analysis of the effects of site geology on the
characteristics of near-field Rayleigh waves, Bull. Seismol. Soc. Am. 78, 65–82.
Nakamura, Y. (1989). A method for dynamic characteristics estimation of subsurface using
microtremors on the ground surface. Quarterly Report of Railway Technical Research
Institute (RTRI) 30, 25-33.
Nakamura Y., (1996). Real-time information systems for hazards mitigation. Proceedings of the
11th World Conference on Earthquake Engineering. Acapulco, Mexico.
Nakamura Y. (2000). Clear identification of fundamental idea of Nakamura's technique and its
applications. Proceedings of the 12th World Conference on Earthquake Engineering.
Auckland, New Zealand.
Nakamura, Y., (2007). Characteristics of H/V spectrum. NATO Advanced Research Workshop,
Dubrovnik, Croatia.
Nash, S. G., and Sofer A. (1996). Linear and nonlinear programming, (Ed. McGraw-Hill
Companies) New York.
Navarro, M., V. Corchete, J. I. Badal, L. Pujades, J. A. Canas, and F. Vidal (1997). Inversion of
Rg waveforms in southern Spain, Bull. Seismol. Soc. Am. 87, 847-865.
Navarro M., F. J. Sanchez, A. M. Posadas, F. Luzon, T. Enomoto, I. Matsuda, F. Vidal and K.
Seo, (1998). Microtremor measurements and its application to seismic microzoning of
Almeria city, southern Spain. Proceedings of the 11th European Conference on
Earthquake Engineering.
Navarro M, Sánchez FJ, Enomoto T, Vidal F, Rubio S. (2000). Relation between the
predominant period of soil ant the damage distribution after Mula 1999 earthquake. In:
Proceedings of the 6th International Conference on Seismic Zonation, Palm Spring,
California, USA, 2000.
Navarro, M., Enomoto, T., Sánchez, F.J., Matsuda, I., Iwatate, T., Posadas, A., Luzón, F., Vidal,
F., and Seo, K. (2001). Surface soil effects study using short-period microtremor
- 251 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
observations in Almería City, Southern Spain, Pure Appl. Geophys. 158, 2481-2497.
Navarro M, García-Jerez A, Vidal F, Enomoto F, Alcalá-García FJ, Yamamoto T, Perez-Ruiz
JA, Luzon F. (2006). Evaluation of local site effect in Mula town (Murcia, Spain)
applicable to seismic risk management. In: Proceedings of the 8th U.S. National
Conference on Earthquake Engineering. San Francisco, 2006, paper 910.
Nazarian, S. (1984). In situ determination of elastic moduli of soil deposits and pavement
systems by spectral analysis of surface waves method. Ph.D. dissertation, Univ. of Texas,
Austin.
Nelder, J.A., and R. Mead (1965). A Simplex Method for Function Minimization, Computer
Journal 7, 308-313.
Newmark, N. M. (1959). A method of computation for structural dynamics. Am. Soc. Civil Eng.
Mech. Div. 85, 67-94.
Nogoshi, M., Igarashi, T. (1971). On the amplitude characteristics of microtremor (part 2), J.
Seismol. Soc. Japan 24, 26-40 (in Japanese with English Abstract).
Ohori, M., Nobata, A., and Wakamatsu, K. (2002). A comparison of ESAC and FK methods of
estimating phase velocity using arbitrarily shaped microtremor arrays, Bull. Seism. Soc.
Am. 92, 2323-2332.
Ohta, Y., and Goto, N. (1978). Empirical Shear Wave Velocity Equations in Terms of
Characteristic Soil Indexes, Earthquake Engineering and Structural Dynamics 6, 167187.
Okada, H. and Matsushima, T., (1989). An exploration Technique using microtremors (1) – an
analytical background to discriminate Love wave in microtremors –, 81st Annual
Meeting for Society of Exploration Geophysicists of Japan, November 1989, Japan.
Okada, H. (2003). The Microtremor Survey Method (translated by Koya Suto). Geophysical
Monograph Series, No.12, Society of Exploration Geophysicists.
Okada, H. (2006). Theory of efficient array observations of microtremors with special reference
to the SPAC method, Exploration Geophysics 37, 73-85.
Okada, H., Matsushima T., (1989). An exploration method using microtremors (1) - an analytical
background to discriminate Love wave in microtremors -. Proc. 81st Annual Meeting for
Society of Exploration Geophysicist of Japan, pp. 15-19, (in Japanese).
Paquet, J. (1969). Étude géologique de l'Ouest de la province de Murcie (Espagne). Bulletin de la
Société Géologique de France 111, 1-270.
Park, C.B., Miller, R.D., Xia, J., (1999). Multichannel analysis of surface waves. Geophysics
64(3), 800-808.
- 252 -
Referencias.
Parolai, S., Bormann, P., and Milkereit, C. (2002). New relationships between VS, thickness of
sediments, and resonance frequency calculated by the H/V Ratio of Seismic Noise for the
Cologne Area (Germany), Bull. Seism. Soc. Am. 92, 2521-2527.
Parolai, S., Picozzi, M., Richwalski, S. M., and Milkereit, C. (2005). Joint inversion of phase
velocity dispersion and H/V ratio curves from seismic noise recordings using a genetic
algorithm,
considering
higher
modes,
Geophys.
Res.
Lett.
32,
L01303,
doi:10.1029/2004GL021115.
Parolai, S., Richwalski, S.M., Milkereit, C., Fäh, D. (2006). S-wave Velocity Profiles for
Earthquake Engineering Purposes for the Cologne Area (Germany). Bulletin of
Earthquake Engineering 4(1), 65-94.
Pei. D. (2007). Modeling and inversion of dispersion curves of surface waves in shallow site
investigations. PhD thesis, University of Nevada, Reno.
Pérez-Ruiz, J. A. (2007). Un método de diferencias finitas para el análisis de la propagación de
ondas. Aplicación al modelado de la respuesta sísmica de estructuras geológicas en
entornos de computación en paralelo. PhD thesis, Universidad de Almería, España.
Peterson J. (1993). Observation and modeling of seismic background noise, U.S. Geol. Surv.
Tech. Rept. 93-322, 1–95, p.1769–1815.
Picozzi, M., S. Parolai, D. Bindi and A. Strollo (2009). Characterization of shallow geology by
high-frequency seismic noise Tomography. Geophys. J. Int. 176, 164-174.
Poggi, V. and Fäh D. (2010). Estimating Rayleigh wave particle motion from three-component
array analysis of ambient vibrations. Geophys. J. Int. 180(1), 251-267.
Press, W.P., Teukolsky, S. A., Vetterling, W.T., and Flannery, B. P. (1992). Numerical Recipes.
(Ed. Cambridge University Press) New York.
Priestley, M.B. (1981). Spectral Analysis and Time Series, Academic Press, New York.
Pulido-Bosch, A., P. Pulido-Leboeuf, and J. Gisbert (2004). Pumping seawater from coastal
aquifers for supplying desalination plants, Geologica Acta 2(2), 97-107.
Raptakis, D., F.J. Chávez-García, K. Makra y K. Pitilakis (2000). Site effects at Euroseistest? I.
Determination of the valley structure and confrontation of observations with 1D analysis,
Soil Dyn. & Earthq. Engrg. 19, 1-22.
Regnier M., S. Moris, A. Shapira, A. Malitzky and G. Shorten, (2000). Microzonation of the
expected seismic site effects across Port Vila, Vanuatu. Journal of Earthquake
Engineering, 4(2), 215-232.
Roberts J. and Asten M. (2007) Further investigation over Quaternary silts using the Spatial
- 253 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
Autocorrelation (SPAC) and Horizontal to Vertical Spectral Ratio (HVSR) microtremor
methods. Explor. Geoph. 38, 175-183.
Roberts, J. C., Asten, M.W., 2004. Resolving a velocity inversion al the geotechnical scale using
the microtremor (passive seismic) survey method, Explor. Geoph. 35, 14-18.
Rosset P., A. De la Puente, L. Chouinard, D. Mitchell et J. Adams, 2002. Site effect assessment
at small scales in urban areas: a tool for preparedness and mitigation. Proceedings of
Improving Post-Disaster Reconstruction in Developing Countries. Montreal, Canada.
Sabra, K. G., P. Gerstoft, P. Roux, W. A. Kuperman, and M. C. Fehler (2005), Surface wave
tomography from microseisms in Southern California, Geophys. Res. Lett. 32, L14311.
Saccorotti, G., J. Almendros, E. Carmona, J. M. Ibáñez, and E. Del Pezzo (2001). Slowness
Anomalies from Two Dense Seismic Arrays at Deception Island Volcano, Antarctica,
Bull. Seismol. Soc. Am. 91, 561-571.
Sambridge, M., (1999). Geophysical inversion with a neighbourhood algorithm: I. Searching a
parameter space. Geophys. J. Int. 138, 479-494.
Sambridge, M., and Mosegaard, K. (2002) Monte Carlo methods in Geophysical inverse
problems. Rev. Geophys. 40, doi:10.1029/2000RG000089.
Sánchez-Sesma, F. J. (1987). Site effects on strong ground motion. Int.J. Soil Dyn. Earthq. Eng.,
6, 124-132.
Sánchez-Sesma, F. J., and M. Campillo (2006). Retrieval of the Green's Function from Cross
Correlation: The Canonical Elastic Problem, Bull. Seism. Soc. Am., 96(3), 1182-1191.
doi: 10.1785/0120050181.
Sánchez-Sesma, F.J., Pérez-Ruiz, J.A., Campillo, M., and Luzón, F., (2006). Elastodynamic 2D
Green function retrieval from cross-correlation: Canonical inclusion problem. Geophys.
Res. Lett. 33, L13305, doi: 10.1029/2006GL026454.
Sánchez-Sesma F.J., Perez-Ruiz J.A., Luzon F., Campillo M., Rodriguez-Castellanos A. (2008).
Diffuse fields in dynamic elasticity. Wave Motion 45, 641-654.
Sanz de Galdeano C, Lopez Casado C, Delgado J, Peinado MA. (1995). Shallow seismicity and
active faults in the Betic Cordillera. A preliminary approach to seismic sources associated
with specific faults. Tectonophysics 248 293-302.
Satoh, T., H. Kawase y S. Matsushima (2001a). Differences between site characteristics obtained
from microtremors, S-waves, P-waves, and Codas, Bull. Seism. Soc. Am. 91, 313-334.
Satoh T., H. Kawase and M. Shin'Ichi, (2001b). Estimation of S-wave velocity structures in and
around the Sendai Basin, Japan, using arrays records of microtremors. Bull. Seism. Soc.
Am. 91(2), 206-218.
- 254 -
Referencias.
Saygin, E. and Kennett, B.L.N. (2010). Ambient seismic noise tomography of Australian
continent. Tectonophysics 481, 116–125.
Schenková, Z., and Zahradnik, J. (1996). Interpretation of the microtremor spectra at the
Zafarraya basin, southern Spain. Soil Dynam. Earthq. Eng. 15, 69-73.
Scherbaum, F., Hinzen, K. G. and Ohrnberger, M. (2003). Determination of shallow shear wave
velocity profiles in the Cologne, Germany area using ambient vibrations, Geophys. J. Int.,
152, 597-612.
Schmidt, R. O. (1981). A signal subspace approach to multiple emitter location and spectral
estimation, Ph.D. Thesis, Stanford University, Stanford, California, 201 pp.
Schneider, J. A., Hoyos, J. L., Mayne, P. W., Macari, E. J., and Rix G. J. (1999). Field and
laboratory measurements of dynamic shear modulus of Piedmont residual soils,
Behavioral Characteristics of Residual Soils. (ASCE) GSP 92, 12-25.
SESAME (2005), Report on FK/SPAC Capabilities and Limitations, WP06 - Derivation of
dispersion curves, SESAME-Project, EVG1-CT-2000-00026, Report-Nr.: D19.06,
http://sesame-fp5.obs.ujf-grenoble.fr
Shah, B.V. (1983). Is the environment becoming more hazardous? Global survey 1947-1980.
Disasters 7, 202-209.
Shapiro, N. M., Singh, S. K., Almora, D. and Ayala, M. (2001) Evidence of the dominance of
higher-mode surface wavesin the lake-bed zone of the Valle of Mexico. Geophys. J. Int.
147, 517-523.
Shapiro, N. M., and M. Campillo (2004). Emergence of broadband Rayleigh waves from
correlations of the ambient seismic noise, Geophys. Res. Lett. 31, L07614, doi
10.1029/2004GL019491.
Shabani, E., M. Eskandari-Ghadi and N. Mirzaei (2010). The SPAC method for a finite Mstation circular array using horizontally polarized ambient noise. Bull. Seism. Soc Am.
Submitted.
Sheen, D. H., Tuncay, K. Baag, C. E. and Ortoleva, P. J., (2006). Parallel implementation of a
velocity-stress staggered-grid finite-difference method for 2D poroelastic wave
propagation, Computers and Geosciences, 32, 1182-1191.
Silva P., Mather A.E., Goy J.L., Zazo C., Harvey A.M. (1996). Controles en el desarrollo y
evolución del drenaje en zonas tectónicamente activas: el caso del río Mula (región de
Murcia, SE España). Revista de la Sociedad Geológica de España 9(3-4), 269-285.
Singh, S. K., E. Mena, and R. Castro (1988). Some aspects of source characteristics of the 19
- 255 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
September 1985 Michoacan earthquake and ground motion in and near Mexico City from
strong motion data, Bull. Seismol. Soc. Am. 78, 451-477.
Socco L.V. and Boiero D. (2008) Improved Monte Carlo inversion of surface wave data,
Geophysical Prospecting 56, 357–371 doi:10.1111/j.1365-2478.2007.00678.x
Tada, T., I. Cho, and Y. Shinozaki (2006). A two-radius circular array method: Inferring phase
velocities of Love waves using microtremor records, Geophys. Res. Lett. 33, L10303, doi:
10.1029/2006GL025722.
Tada, T., I. Cho, and Y. Shinozaki (2007). Beyond the SPAC method: exploiting the wealth of
circular-array methods for microtremor exploration, Bull. Seismol. Soc. Am. 97, 20802095.
Tada, T., I. Cho, and Y. Shinozaki (2009). New Circular-Array Microtremor Techniques to Infer
Love-Wave Phase Velocities, Bull. Seismol. Soc. Am. 99, 2912-2926.
Tada T., Cho I., and Shinozaki Y. (2010). Analysis of love-wave components in microtremors,
En Proceedings of the 7th International Conference on Urban Earthquake Engineering
(7CUEE) & 5th International Conference on Earthquake Engineering (5ICEE), 115-124.
March 3-5, 2010, Tokyo Institute of Technology, Tokyo, Japan.
Taga, N. (1993). Earthquake motion and ground conditions, (Ed. The Architectural Institute of
Japan), Tokyo. pp. 315-325.
Talhaoui A., A. Iben Brahim, M. H. Aberkan, M. Kasmi and A. El Mouraouah, 2004. Seismic
microzonation and site effects at al Hoceima city, Morocco. Journal of Earthquake
Engineering, 8(4), 585-596.
Tamura S. (1996). Comparison of Body and Rayleigh Wave Displacements Generated by a
Vertical Force on a Layered Elastic Medium, Proc. 11th World Conf. on Earthquake
Engineering, paper 1722, CD-ROM.
Tanimoto, T., Ishimaru, S. and Alvizuri, C. (2006). Seasonality in particle motion of
microseisms. Geophys. J. Int. 166, 253–266.
Tarantola, A. (2005). Inverse Problem Theory and Methods for Model Parameter Estimation.
Siam, Philadelphia.
Teng T.-L. and Aki K. (1996). Preface to the 1994 Northridge earthquake special issue
Bull. Seism. Soc. Am., 86, S1 - S2.
Tobita J., N. Fukuwa and M. Nakano, (2000). Estimation of deep and shallow soil structures
using H/V spectrum of densely measured microtremor records. Proceedings of the
International Conference on Geotechnical & Geological Engineering. Paper 0645.
Toki, K., Irikura, K. and Kagawa, T. (1995). Strong motion data recorded in the source area of
- 256 -
Referencias.
the Hyogoken-nanbu earthquake, January 17, 1995 Japan, J. Natural Disaster Sci. 16, 2330.
Tokimatsu, K., (1997). Geotechnical site characterization using surface waves. In: Ishihara (Ed.),
Earthquake Geotechnical Engineering. Balkema, Rótterdam, pp. 1333-1368.
Toksöz, M.N., (1964). Microseisms and an attempted application to exploration. Geophysics
29(2), 154–177.
Toksöz, M.N., Lacoss, R.T., (1968). Microseisms: mode structure and sources. Science 159,
872–873.
Trifunac, M.D. (1971). Surface motion of a semi-cylindrical alluvial valley for incident plane SH
waves, Bull. Seism. Soc. Am. 61, 1755-1770.
Tuladhar R., F. Yamazaki, P. Warnitchai and J. Saita (2004). Seismic microzonation of the
greater Bangkok area using microtremor observations. Earthquake Engineering and
Structural Dynamics, 33(2), 211-225.
UNDRO (1980). Natural disasters and vulnerability analysis. Report Expert Group Meeting,
Geneva, 49 pp.
van der Baan M. (2009). The origin of SH-wave resonance frequencies in sedimentary layers.
Geophys. J. Int. 178, 1587-1596. doi:10.1111/j.1365-246X.2009.04245.x.
Valle-Molina C. (2006). Measurements of Vp and VS in Dry, Unsaturated and Saturated Sand
Specimens with Piezoelectric Transducers. PhD Thesis. University of Texas at Austin.
Villaseñor, A., Y. Yang, M. H. Ritzwoller, and J. Gallart (2007), Ambient noise surface wave
tomography of the Iberian Peninsula: Implications for shallow seismic structure,
Geophys. Res. Lett., 34, L11304, doi:10.1029/2007GL030164.
Wapenaar K. (2004). Retrieving the elastodynamic Green's function of an arbitrary
inhomogeneous medium by cross correlation, Phys. Rev. Lett. 93, 254301/1-254301/4.
Wathelet, M. (2005). Array recordings of ambient vibrations: surface-wave inversion. PhD
thesis, University of Liège, Belgium.
Wegler, U., Nakahara, H., Sens-Schönfelder, C., Korn, M., Shiomi, K. (2009). Sudden drop of
seismic velocity after the 2004 Mw 6.6 Mid-Niigata earthquake, Japan, observed with
Passive Image Interferometry. J. Geophys. Res. 114, B06305, doi:10.129/2008JB005869.
Whiteley, R.J., (1994). Seismic refraction testing - a tutorial -. In: Woods, R.C. (Ed.),
Geophysical Characterization of Sites. Balkema, Rótterdam, pp. 45-47.
Whitley, D. L., (1994). A genetic algorithm tutorial. Stat. Comput. 4, 65–85.
Withers M.M., Aster R.C., Young C.J., Chael E.P. (1996), High-frequency analysis of seismic
- 257 -
Desarrollo y evaluación de métodos avanzados de exploración sísmica pasiva.
background noise as a function of wind speed and shallow depth, Bull. Seism. Soc. Am.
86, 1507-1515.
Wong, H. L. and Trifunac, M. D. (1074). Surface motion of a semi-elliptical for incident plane
SH wave. Bull. Seism. Soc. Am. 64 1389-1403.
Woods, J. W. and P. R. Lintz, (1973) Plane waves at small arrays. Geophysics 38(6), 1023-1011.
Yaglom, A.M., (1962). An Introduction to the Theory of Stationary Random Function. Prentice
Hall, Englewood Cliffs, New Jersey.
Yamanaka, H., Dravinski, M., Kagami, H., (1993). Continuous measurements of microtremors
on sediments and basement in Los Angeles, California. Bull. Seism. Soc. Am. 83(5),
1595–1609.
Yamanaka, H., Takemura, M., Ishida, H., Niwa, M., (1994). Characteristics of long-period
microtremors and their applicability in exploration of deep sedimentary layers. Bull.
Seism. Soc. Am. 84(6), 1831–1841.
Yamanaka, H., Ishida, H., (1996). Application of Genetic algorithms to an inversion of surfacewave dispersion data. Bull. Seism. Soc. Am. 86, 436-444.
Yamanaka, H., (2005). Comparison of Performance of heuristic Search Methods for Phase
Velocity Inversion in Shallow Surface Wave Method. Journal of Environmental and
Engineering Geophysics 10, 163-173.
Yang, Y., Ritzwoller, M.H., Levshin, A.L. & Shapiro, N.M., (2007). Ambient noise Rayleigh
wave tomography across Europe, Geophys. J. Int. 168, 259-274.
Yao, H., Van Der Hilst, R.D. and de Hoop, M.V., (2006). Surface-wave array tomography in SE
Tibet from ambient seismic noise and two-station analysis - I. Phase velocity maps,
Geophys. J. Int. 166, 732-744.
Yao, H., Beghein, C., and Van der Hilst, R.D., (2008). Surface-wave array tomography in SE
Tibet from ambient seismic noise and two-station analysis: II – Crustal and upper mantle
structure. Geophys. J. Int. 173(1), 205-219, doi: 10.1111/j.1365-246X.2007.03696.x.
Yoshida, Y., and I. Motonori (1988), Empirical formulas of SPT blowcounts for gravelly soils.
In Proceedings of First International Symposium on Penetration Testing (ISOPT-1), pp.
381– 387, A. A. Balkema, Brookfield, Vt.
Young C.J., Chael E.P., Withers M.M., Aster R.C. (1996). A comparison of the high-frequency
(>1 Hz) surface and subsurface noise environment at three site in the United States, Bull.
Seism. Soc. Am. 86, 1516-1528.
Zywicki D.J. (1999). Advanced signal processing methods applied to engineering analysis of
seismic surface waves. PhD thesis, Georgia Institute of Technology, USA.
- 258 -