control distibuido introduccion y fundamentos
Anuncio

CONTROL DISTIBUIDO
PRÁCTICA 1:
INTRODUCCION Y FUNDAMENTOS
ELENA ALEJO TEISSIERE
INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS
Apartado 1 – Sumideros, fuentes y el espacio de trabajo: Entradas y salidas de Simulink.
En este apartado, se define un sistema para ver las salidas y entradas por el Simulink.
Escribir un script que defina todas los parámetros de cada una de las señales en el espacio de
estados, realice la simulación usando la función sim y posteriormente represente en dos figuras
diferentes la señal escogida usando la función plot, una usando la variable datos_simulacion y la
otra utilizando la información del fichero fichero_simulacion.mat.
Se proporcionan el fichero script y el modelo, percatandome que le falta la señal número 6, la implemento y
añado en el script un “input” para poder escribir la entrada que queramos simular.
Se realizan dos gráficas en cada simulación, sacando la información desde el elemento de salida
workspace y desde el elemento to File, evidentemente ambas gráficas serán iguales.
A continuación les exponemos los resultados de la simulación.
Simulación de la Señal 6, mediante las herramientas workspace y To File.
Representación de cambios producidos en el circuito fuente:
Modificaciones del script:
% 6 = Un impulso de amplitud A
entrada = input('Introduce la entrada a seleccionar (1-6)\n');
%Parámetros para Un impulso de amplitud A
A = 3;
Apartado 2. Modelado y simulación de sistemas dinámicos.
Se proporcionan el fichero script y el modelo P2a.mdl y P2a_script.m .
% Parametros del circuito RC
R = 51.5;
C = 0.01408;
b) Usando el modelo de Simulink desarrollado en el apartado anterior, realizar las siguientes
simulaciones:
• Generar una figura que muestre las respuestas del sistema a un escalón de 0 a Uf en el instante 2
(s) con Uf = [1 3 5] en rojo. Medir el valor de V out en el instante 4 (s) para cada una de las
simulaciones [p1].
En el instante Vout en el instante 4 (s) para [1 3 5] respectivamente es aproximadamente 0.9, 2.9 y 4.9.
parámetros modificados en el script:
entrada = 1;
Vout0 = 2;
Suf = [1 3 5];
plot(vout(1,:),vout(2:4,:),'r')
plot(vin(1,:),vin(2:4,:),'b')
Al ser una matriz Suf, al realizar la gráfica hay que indicar que salidas de las 3 posibles quieres enseñar.
Generar una figura que muestre las respuestas del sistema frente a una entrada senoidal de fase
inicial 0, valor de continua 5, frecuencia Sfrec = [5] y amplitud Sa = [1 2 3]. Medir el valor de V out en
el instante 10 (s) para cada una de las simulaciones [p2].
Parámetros modificados en el script
tf = 10;
entrada = 2;
Vout0 = 0;
Sa = [1 2 3];
Sc = 5;
Sfrec = 5;
Sfase = 0;
Gráfica de la función:
Aumento de la gráfica en el instante V out = 10
Dando como valores aproximados, para los valores [1 2 3] respectivamente 4.2, 4.49, 4.73
Generar una figura que muestre las respuestas del sistema frente a una entrada senoidal de fase
inicial 0, valor de continua 0, frecuencia Sfrec = [1 5 10] y amplitud Sa = [1]. Medir el valor de V out en
el instante 7 (s) para cada una de las simulaciones [p3].
Parámetros modificados en el script
tf = 7;
entrada = 2;
Vout0 = 0;
Sa = 1;
Sc = 0;
Sfrec = [1 5 10];
Sfase = 0;
Gráfica de la función:
Aumento en Vout = 7
Aproximadamente para los valores Sfrec = [1 5 10] respectivamente los valores son 0.05 , 0.2 y – 0.1.
Generar una figura que muestre las respuestas frente a un escalón de 1 a 2 en el instante de tiempo
3 de circuitos RC diferentes definidos por los siguientes parámetros: [R, C], [2R, C] y [0.5R, C]. Medir
el valor de V out en el instante 10 (s) para cada una de las simulaciones [p4].
Para realizar el circuito, realizamos un bucle FOR para modificar los valores de la resistencia, simulando
tres circuitos en un script.
Parte modificada del codigo script:
entrada = 1;
%parametros
t0 = 0;
tf = 10;
St0 = 3;
Su0 = 1;
Suf = 2;
%representación
valores=[R 2*R 0.5*R];
for val=1:3
R=valores(val);
sim('P2a');
load('fichero_vout')
vout = ans;
load('fichero_vin')
vin = ans;
plot(vout(1,:),vout(2,:),'r')
plot(vin(1,:),vin(2,:),'b')
end
Salida del circuito con diferentes resistencias:
En el instante t = 10s . Se puede observar claramente que el circuito ha alcanzado el valor del
escalón. En respuesta de la subida de tensión producida por el escalón en la entrada.
Por lo tanto para R, R*2 y 0.5*R el valor en el instante t = 10 es 2 V.
Generar una figura que muestre las respuestas frente a un escalón de 0 a 1 en el instante de tiempo
5 con Vout0 = [-1 0 5]. Medir el valor de V out en el instante 10 (s) para cada una de las simulaciones
[p5].
Volvemos a realizar tres simulaciones distinstas, en este caso para valores de V out Diferentes
Modificaciones en el script:
St0 = 5;
Su0 = 0;
Suf = 1;
valores=[-1 0 5];
for val=1:3
Vout0=valores(val);
Como podemos observar para valores inciales distintos, en un tiempo t(10), el sistema consigue
estabilizarse tras modificar bruscamente la tensión del circuito. Por lo tanto la tensión en el instante de
tiempo tf = 10 para las tres entradas es de 1 voltio.
Generar una figura que muestre las respuestas frente a un impulso de amplitud A = [1, 3, 5] en el
instante de tiempo 5. Medir el valor de V out en el instante 7.5 (s) para cada una de las simulaciones
[p6].
Para realizar este apartado primero tenemos que modifcar el circuito puesto que no se ha implementado el
impulso de amplitud A.
Modificaciones en el script:
%
3 = Impulso
entrada = 3;
% Parametros del impulso
% ts1 = Tiempo de inicio step 1
% ts2 = Tiempo de inicio step 2
% A = amplitud
ts1 = 4;
ts2 = 5;
A = [1 2 5];
figure
hold on
plot(vout(1,:),vout(2:4,:),'r')
plot(vin(1,:),vin(2:4,:),'b')
Figura de la simulación
Detalle para el intante t = 7.5 como se puede observar todavia el circuito no se ha estabilizado, por lo tanto
no vale cero todavia, los valores serían para las amplitudes A =[ 1 2 3] respectivamente [0.15, 0.25, 0.5]
aproximadamente.
A p art ado 3 – Z orro s y C o nejo s. E l m o delo de L ot k a-Volterra.
Ficheros utilizados : P3.mdl y P3a_script . Ficheros de datos : X.mat e Y.mat
Cosidero las dos funciones, las integro, y transformo las ecuaciones en bloques de simulink.
Las ecuaciones son:
X sería la variación de población de conejos mientra que Y se refiere a la variación de población de Zorros.
Ajuste el tiempo de simulación de forma apropiada para ver al menos cuatro ciclos.
Cada bloque integrador, su salida tiene el valor inicial de X0 e Y0.
Para facilitar el trabajo he hecho un script donde están las variables, como se indican en la practica, también
está la variable tf ajustada para que se representen los cuatro ciclos. Esta variable representa el tiempo de
representacion.
Modelo:
Script:
%variables
DNI = [3 0 2 4 2 1 4 7];
alpha = 0.5*(DNI(1) + 1);
beta = 0.5*(DNI(2) + 1);
ganma = 0.5*(DNI(3) + 1);
delta = 0.5*(DNI(4) + 1);
X0 = 0.5*(DNI(5) + 1);
Y0 = 0.5*(DNI(6) + 1);
% tf = tiempo de representación
tf=20;
sim('P3')
%representacion
load('Y.mat')
zorros = ans;
load('X.mat')
conejos = ans;
figure
hold on;
plot(zorros(1,:),zorros(2,:),'r')
plot(conejos(1,:),conejos(2,:),'b')
figure
hold on;
plot(X1,Y1,'b')
Representación de Zorros en rojos, frente conejos en azul. Como podemos ver en cuanto incrementa la
población de zorros disminuye la población de conejos, en cuanto esta empieza a subir, aumenta la
población de Zorros siguiendo un ciclo.
Esta gráfica representa el eje de abcisas la población presa x (conejo) y en el eje de ordenadas
la población depredadora y (zorro).
Medir el valor de x y y en el instante 10 (s) [p7].
Aproximadamente:
Conejos : 0.25
Zorros : 12.5
Medir los valores de población máximos y mínimos para la población presa x [p8].
Mínimo: muy cercano a 0 ; máximo 2.
Medir los valores de población máximos y mínimos para la población depredadora y [p9].
Mínimo : 0.5; máximo 12,5
Anexo trás comprobación del caso: Zorros y Conejos. El modelo de Lotka-Volterra.
Con motivo del fallo generalizado en este modelo, he comprobado el mi modelo, y mirando en el circuito de
muestra, que nos viene en la guia de simulink, he realizado dicho modelo ejemplo y efectivamente en mi
modelo se observan para los mismos datos hay resultados diferentes. He comprobado ambos modelos, y
efectivamente hay diferencias entre las ecuaciones que carácterizan el modelo de Lotka- Volterra en la
practica y en el libro. Aunque creo que son equivalentes.
La primera es la ecuacion de la práctica y la segunda la que viene en el libro, aunque se construyan
modelos diferentes supongo que los resultados deberían ser los mismos, puesto que parecen ecuaciones
equivalentes.
El circuito realizado basado en el libro es:
y los resultados:
Conejos en azul.
Zorros en rojo.
Espero que sirva para averiguar el fallo en el circuito.
Archivos utilizados:
libro_script.m
libro.mdl
C1) Indique tres formas de definir una señal de entrada a un sistema en Simulink. Explique como
diseñaría una señal de entrada definida por la suma de una senoida y un escalón.
Hay tres formas:
1. Mediante una fuente disponible en la librería simulink
2. Una matriz definida en el matlab agregandola al bloque de simulink “simin”
3. O la reutilización de una señal creada por una simulación guardada en un archivo “.mat”.
C2) ¿Cuál es la diferencia entre un parámetro y una entrada de un sistema?
Los parámetros se utilizan para definir las condiciones inciales del sistema.
Una entrada al sistema, es una señal externa al sistema al cual le corresponderá una salida. Se utiliza para
comprobar el comportamiento del sistema (su salida) que depende de la salida.
La diferencia principal , es que como los parametros definen las condiciones inciales, son valores fijos. La
entrada es la que se encarga de modificar ciertos paramétros en el tiempo que serán comprobados en la
salida. Por lo tanto puede ser variable en el tiempo.
C3) ¿Qué datos son necesarios para realizar una simulación de un sistema dinámico en un
determinado periodo de tiempo? Identifique estos datos en el apartado 2.
Entradas:
Escalon, Senoidal, Pulso
Las salidas:
Scope y To_File
Los valores iniciales: (parámetros)
Vo(0), R y C.
Y la definición de tiempo de simulación t0 – tf.
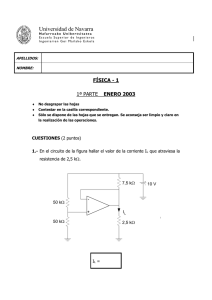
C4) Defina las entradas y las salidas de un sistema descrito por un circuito RC.
La entrada sería la tensión que entra en el sistema (ya sea mediante un pulso, Senoide, etc..) produciendo
una reacción en el circuito RC.
La salidas del sistema, es la salida del sistema RC, en donde se apreciará las propiedades de un circuito
resitencia – condensador estudiando distintas entradas.
C5) ¿Cómo afecta a la salida de un circuito RC frente a una entrada escalón la amplitud de la misma?
Por las propiedades del condensador, que tiene memoria (Vo, estado incial del circuito) y continuidad, se
observa en las gráficas que al cambiar una tensión de entrada el circuito devuelve un cambio gradual hasta
llegar a la nueva tensión fijada de entrada.
Por lo tanto a distintas amplitudes el cambio de tensión es mas brusco, por lo tanto a mayor amplitud, mas
tiempo tarda en estabilizarse el sistema.
C6) ¿Cómo afecta a la salida de un circuito RC frente a una entrada senoidal la amplitud, la
frecuencia y el valor de continua de la misma?
Como hemos descrito en la pregunta anterior, el condensador tiene un efecto llamado continuidad que no
permite, tiene una fuerza de oposición, ante un cambio brusco de tensión. Por lo tanto tal y como vemos en
las simulaciones realizadas:
Amplitud: A mayor amplitud mayor es la diferencia de tensión por lo tanto mayor tensión tendrá de salida.
Frecuencia: Indica el cambio en el tiempo de la curva de la senoide, por lo tanto, más lenta sea la caida o
subida de tensión el sistema tendrá “mas tiempo” para estabilizarse por lo tanto, a menor frecuencia,
entrada y salida serán mas parecidas con un retraso proporcionado por la fuerza de oposición que tenga
condensador.
Valor de continua: No afecta porque solo indica el valor inicial de la senoide.
C8) ¿Cómo afecta a la salida de un circuito RC frente a una entrada escalón el valor de la resistencia
y de la capacidad?
Estos valores definen la frecuencia de corte del filtro RC. Depende de estos valores que la señal de salida
se atenúe antes o después. Por lo tanto en el condensador indicarán la fuerza de oposición y los valores
iniciales (memoria) de un condensador.
C9) ¿Depende el valor final de la tensión que cae en el condesador de un circuito RC (V out) del valor
inicial?
Si, aunque siempre va a llegar a un estado estable, El valor inicial define el comportamiento del
condensador en los primeros momentos instantes.
C10) Defina el estado de un sistema. ¿Cual es el estado de un circuito RC? ¿Y de un sistema
definido por la ecuaciones de Lotka Volterra? Indique la relación entre el estado de un sistema y los
integradores usados para modelarlo en Simulink.
El estado es una descripción de la situación actual de un sistema.
El estado de un circuito RC es v(0).
En el sistema de lotka-volterra el estado se define por el numero de presas y depredadores iniciales.
En los integradores se definen las condiciones iniciales, por tanto, estos definen el estado Inicial.
C11) ¿Cuales son las entradas y las salidas de un sistema descrito por la ecuaciones de Lotka
Volterra?
Este sistema tiene como entrada los valores iniciales que indican la población de zorros y conejos en un
primer instante. (X0, Y0)
Las salidas son las poblaciones de zorros y conejos es la variación de la población en el tiempo. (X1, Y1)
C12) Indique el efecto de las poblaciones iniciales en un sistema descrito por la ecuaciones de Lotka
Volterra.
Las poblaciones iniciales condicionan toda la simulación, dependiendo del numero de presas o
depredadores existentes se dan unos ciclos u otros de población. Aunque en realidad, los ciclos a diferentes
condiciones iniciales, son proporcionales entre sí. Se podría definir que la poblaciones iniciales indican los
maximos y minimos de la función.
C13) ¿Es posible que se llegue a la aniquilación de una de las dos especies?
Al ser un ciclo, tendería a estabilizarse, he puesto la prueba de 100 zorros y 10 conejos.
Como se puede observar, aunque no sea una situación ideal, los zorros disminuirían hasta conseguir un
valor estable.
C14) ¿Qué ocurriría si no hubiera presas? ¿Y depredadores?
Si no hay depredadores, el sistema se volvería inestable, puesto que crecería la población
exponencialmente (una invasión de conejos)
En cambio si solo hay depredadores, morirían todos.
C15) Estime el tiempo dedicado a realizar esta práctica y su memoria.
Unas 6 horas.