Trabajos preliminares para el empleo de la optimización
Anuncio

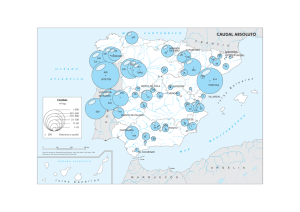
Trabajos preliminares para el empleo de la optimización multiobjetivo en la comparación de performances de dos modelos hidrológicos para distintos escenarios de pronóstico Facundo J. Alonso(1), Nicolás Le Moine(2), Ludovic Oudin(2), Pierre Ribstein(2), Juan Carlos Bertoni(1) (1) Facultad de Cs. Ex. Fís. y Nat. de la “Universidad Nacional de Córdoba”, Argentina. (2)Laboratorio Sisyphe 7619, “Université Pierre et Marie Curie”, París, Francia. E-mail: [email protected] RESUMEN: Existe en la actualidad un gran número de modelos hidrológicos empleados para realizar el pronóstico de caudales a tiempo real en una cuenca hidrográfica. La mayor parte de dichos modelos han sido desarrollados bajo la premisa de que la información de lluvia y caudales observados es transmitida ininterrumpidamente. Ahora bien, si durante el proceso de pronóstico se produce una falla en el sistema de transmisión de caudales observados al centro de procesamiento de datos, el modelo comienza a trabajar como un simple modelo de simulación, perdiendo todas las ventajas que le atribuían los procesos algorítmicos implicados en el pronóstico. Este trabajo presenta las primeras tareas llevadas a cabo para evaluar la performance de la modelización matemática en distintos escenarios de previsión. Con este propósito se emplean dos modelos matemáticos hidrológicos de transformación lluvia-caudal, denominados “GR” e “IPH2”, de amplia difusión en Francia y Brasil respectivamente. Para la evaluación comparativa de dichos modelos, se prevé la utilización de dos algoritmos genéticos de optimización multi-objetivo, donde el criterio de performance estará representado por el coeficiente de persistencia. El bien probado algoritmo “MOCOM-UA”, será contrastado con la eficacia del moderno “CaRaMEL” para deducir de la Región de Pareto, las características de eficacia y robustez de los modelos probados frente a los distintos escenarios. Los datos son obtenidos de cuencas francesas, españolas y argentinas, con distintas series de paso de tiempo diario y horario. INTRODUCCIÓN Desde los tiempos más remotos de los cuales se tenga alguna evidencia histórica, las poblaciones del mundo presentan una marcada tendencia al asentamiento sobre las márgenes de los cursos de agua dulce. Esto es completamente razonable si consideramos que el agua es un recurso indispensable para una buena parte de las actividades humanas, como son el consumo, la limpieza, la fabricación, el cultivo, etc. La conciencia de planificación urbana no siempre ha acompañado estos cambios, teniendo por consecuencia, en algunos casos, la invasión del lecho histórico del río, y en la misma medida un incremento del grado de vulnerabilidad frente a recurrentes crecidas de los niveles de agua del río. En síntesis, las inundaciones urbanas son un fenómeno cada vez más frecuente en varias regiones del planeta, de las cuales, en nuestro país tenemos algunos ejemplos. Si bien no siempre es posible evitar que se produzca la crecida, existen métodos para reducir, al menos parcialmente, el desastre que acompaña al fenómeno, fundamentalmente en términos de seguridad de las personas. Entre estos métodos, se encuentran los Sistemas de Pronóstico de Crecidas, cuya complejidad puede ser muy variable en función de los componentes que lo integren. Normalmente los sistemas de pronóstico de crecidas están vinculados a una red de alerta frente a inundaciones que pone en movimiento el personal de Defensa Civil, que se ocupará de evacuar las zonas con alta probabilidad de inundación y con marcada vulnerabilidad frente a la llegada del agua. En este más o menos complejo sistema de previsión aparecen como herramientas claves los modelos hidrológicos de pronóstico de crecidas. Es decir, aquellas estructuras matemáticas capaces de utilizar la información disponible de lluvia y caudal para estimar con algún grado de probabilidad, cuál será el caudal (o nivel) de agua que llegará a una sección determinada de interés, con algún horizonte de tiempo de anticipación. El grado de precisión con que un modelo hidrológico es capaz de estimar estos valores depende de algunos factores, como la calidad del modelo mismo para realizar el pronóstico, pero fundamentalmente los datos disponibles. La mayor parte de dichos modelos han sido desarrollados bajo la premisa de que la información de lluvia y caudales observados es transmitida ininterrumpidamente. Ahora bien, si durante el proceso de pronóstico se produce una falla en el sistema de transmisión de caudales observados al centro de procesamiento de datos, el modelo comienza a trabajar como un simple modelo de simulación, perdiendo todas las ventajas que le atribuían los procesos algorítmicos implicados en el pronóstico. Este trabajo constituye los primeros pasos en el análisis de las consecuencias que puede acarrear a la capacidad del modelo en la predicción de caudales la ausencia de la información transmitida a tiempo real. La propuesta de trabajo incluye el empleo de una metodología de optimización multi-objetivo capaz de generar la Región de Pareto optimizando los parámetros para un modelo hidrológico frente a dos condiciones distintas: 1) considerar el modelo funcionando como un simple modelo de simulación, asumiendo que se ha perdido durante el pronóstico la transmisión de datos de caudal en la sección de aforo medidos en tiempo real, y 2) el modelo trabajando con la disponibilidad de la información referida. Como metodología de optimización se ha propuesto el empleo de dos algoritmos multi-objetivo, denominados MOCOM-UA (Yapo et al., 1998) y CaRaMEL (Le Moine, 2009), y como modelos hidrológicos, los modelos IPH2 (Tucci et al., 1981) y Génie Rural Prévision horario (Berthet, 2010). El propósito de esta publicación es presentar el estado de avance en la línea de trabajo descripta previamente y mostrar algunos resultados preliminares. Con el fin referido, se ha escrito un programa computacional en lenguaje Fortran 90/95 que ejecuta la optimización mediante el algoritmo MOCOM-UA de ambos modelos hidrológicos GRP e IPH2, con la salvedad de que este último aún no se encuentra en su versión final del modo previsión. Actualmente se está trabajando además en compatibilizar al programa referido, un segundo programa computacional escrito en lenguaje SciLab, con el cual se ejecuta el algoritmo CaRaMEL. Por esta razón, a continuación se presenta solamente una descripción completa del modelo GRP y del algoritmo de optimización MOCOM-UA, de los cuales se muestran al final algunos resultados preliminares. Una descripción completa del modelo IPH2 puede encontrarse en Alonso (2008), y del algoritmo CaRaMEL en Le Moine (2009). EL PRONÓSTICO HIDROLÓGICO Conforme es descripto en Bertoni (2004), la previsión de caudales en un determinado lugar puede ser realizada a corto plazo (tiempo real) o a largo plazo. La previsión de corto plazo se denomina pronóstico en tiempo real e implica la predicción de la magnitud de la crecida cuando la precipitación es conocida o prevista. Entonces, se emplea un modelo matemático-hidrológico que calcula el caudal (o el nivel) del río en base a la precipitación conocida o prevista. El pronóstico de crecidas se realiza por lo general con pocas horas o días de antecedencia, dependiendo del tiempo que requiere el agua, después de precipitada, para escurrir por la cuenca hidrográfica hasta la sección del río donde se desea la información. Un sistema de alerta de pronóstico en tiempo real envuelve los siguientes aspectos: 1) sistema de colecta y transmisión de informaciones; 2) sistema de procesamiento de informaciones; 3) modelo de previsión de caudales y niveles; 4) procedimientos para la transferencia de informaciones para la Defensa Civil y la sociedad; y 5) planificación de las situaciones de emergencia a través de la Defensa Civil. Los tres primeros ítems implican el establecimiento de procedimientos técnicos específicos. Normalmente estas actividades son desarrolladas por entidades que operan la red de alerta provincial o federal. Los dos ítems siguientes implican la transferencia de los niveles para la población. Como lo apunta adecuadamente Berthet (2010), los modelos hidrológicos usados para realizar simulación son concebidos con distinto criterio que aquellos empleados en previsión. La simulación se interesa de la misma manera por los datos asociados a todos los pasos de tiempo pasados, y no utilizan más datos que aquellos que sean causales de caudal. Mientras que la previsión se concentra en un pequeño número de pasos de tiempo próximos al instante de previsión, y permite el empleo de todo dato pasado explicativo, aún cuando no sea causal del caudal que se desea predecir en la sección de interés. Berthet (2010) indica además que un modelo de estas características, debe imperativamente tener buena performance, es decir proveer las previsiones posibles. En este sentido sería deseable que el modelo sea: 1. Robusto: debe funcionar a partir de datos comúnmente medidos por el servicio operativo, pero también ser adaptable a situaciones deficientes (carencia de datos o mala estimación por ejemplo). 2. Simple de emplear: un modelo que exige el control de numerosos datos y de numerosos datos y operaciones de parte del usuario, es inutilizable frente a una situación de crisis o urgencia. 3. Capaz de proveer una representación del funcionamiento de la cuenca hidrográfica comprensible por el hidrólogo: este último podrá entonces construir su experiencia del modelo, acrecentar su conocimiento en el mismo, anticipar una parte de sus errores. 4. No específico a un sitio en particular sino capaz de adaptarse a diferentes cuencas hidrográficas. DESCRIPCIÓN DEL MODELO HIDROLÓGICO GÉNIE RURAL PRÉVISION (GRP) Como puede leerse en Perrin et al. (2007), el “CEMAGREF” (centro de investigación de Francia, actualmente “IRSTEA”) comenzó a desarrollar a comienzos de los años 1980 los modelos hidrológicos Génie Rural (GR) capaces de realizar la vinculación entre la lámina de agua caída en la cuenca hidrográfica y el caudal correspondiente producido en su sección de concentración. Más allá de su aspecto práctico, estos modelos han planteado los interrogantes esenciales respecto del modo de representar la transformación de la lluvia en caudal a la escala de cuenca hidrográfica. Desde aquel punto de partida, en que fue planteada una estructura original del modelo, hasta el presente, el mismo ha presentado una secuencia de versiones asociadas a ciertas variaciones en su estructura relativas principalmente al paso de tiempo de la serie empleada en la simulación. Estas versiones arribaron actualmente a los modelos GR1A con paso de tiempo anual (Mouelhi, 2003), GR2M con paso de tiempo mensual (Mouelhi et al., 2006b), GR4J con paso de tiempo diario (Perrin et al., 2003), y GR4H con paso de tiempo horario (Mathevet, 2005). Adicionalmente Tangara (2005) propuso el modelo GRP que representa un salto en la cadena evolutiva de los modelos hidrológicos Génie Rural al campo de la previsión hidrológica, empleándolo con series de datos diarios. Posteriormente Berthet (2010) y Lilas et al. (2012) emplearon el modelo GRP con series de datos horarios. Cada una de las versiones referidas ha sido puesta a punto bajo el respaldo de un gran número de cuencas de distintas partes del mundo. Por ej. en Perrin (2000) y en Tangara (2005) se emplearon respectivamente 429 y 188 cuencas de Francia, Estados Unidos, Australia, Costa de Marfil y Brasil. Sin embargo, uno de los criterios asumidos fue la simplicidad de las estructuras alcanzadas para los modelos, por esta razón las versiones posteriores al modelo GR4J (Perrin, 2000) sólo presenta pequeñas diferencias respecto de este. Así Tangara (2005) incorporó a la estructura del modelo, un componente que tiene en cuenta la actualización de algunas variables de estado sobre la base de los caudales observados, mientras que Berthet (2010) y Lilas et al. (2012) ajustaron ciertos parámetros fijos del modelo para adaptarlo al procesamiento de datos horarios en pronóstico hidrológico. En este trabajo se utilizó un modelo combinado de las versiones anteriores, capaz de trabajar en simulación o previsión, según sea preferido por el usuario, y de procesar información con paso de tiempo diario y horario, según sea la naturaleza de los datos empleados. Por las razones antes expuestas, a continuación se describe la estructura del modelo GR4J, como es presentado en Perrin (2007), y luego se precisan aquellas modificaciones necesarias para ser adaptado al proceso de pronóstico hidrológico y para permitir el procesamiento de información de distintos pasos de tiempo. En la Figura 1 se presenta un esquema de la estructura del modelo, donde Pk es la lluvia diaria del día k y E la evapotranspiración potencial promedio para el mismo día calendario. Neutralización La primera operación es la neutralización de Pk por E para determinar una lluvia neta Pn y una evapotranspiración neta En calculada por: Si Pk ≥ E, entonces Pn = Pk – E y En = 0 Si Pk < E, entonces Pn = 0 y En = E – Pk Figura 1.- Esquema de la estructura del modelo GR4J con el proceso de actualización Función de producción En el caso en el cual Pn es distinto de cero, una parte Ps de Pn alimenta al reservorio de producción y es calculado por la ecuación (1), donde X1 (mm) es la capacidad máxima del reservorio de producción y Sk el contenido del reservorio de producción al comienzo del día k. 𝐏𝐏𝐬𝐬 = 𝐒𝐒 𝟐𝟐 𝐏𝐏 𝐗𝐗 𝟏𝟏 �𝟏𝟏−�𝐗𝐗𝐤𝐤 � � 𝐭𝐭𝐭𝐭𝐭𝐭𝐭𝐭�𝐗𝐗𝐧𝐧 � 𝟏𝟏 𝐒𝐒 𝐏𝐏 𝟏𝟏+�𝐗𝐗𝐤𝐤 � 𝐭𝐭𝐭𝐭𝐭𝐭𝐭𝐭�𝐗𝐗𝐧𝐧 � 𝟏𝟏 𝟏𝟏 𝟏𝟏 (1) En el caso contrario, cuando En es distinto de cero, una cantidad de evaporación Es es retirada del reservorio de producción, la cual está dada por: 𝐄𝐄𝐬𝐬 = 𝐒𝐒 𝐄𝐄 𝐒𝐒𝐤𝐤 �𝟐𝟐−𝐗𝐗𝐤𝐤 � 𝐭𝐭𝐭𝐭𝐭𝐭𝐭𝐭�𝐗𝐗𝐧𝐧 � 𝟏𝟏 𝟏𝟏 𝐒𝐒 𝐄𝐄 𝟏𝟏+�𝟏𝟏−𝐗𝐗𝐤𝐤 � 𝐭𝐭𝐭𝐭𝐭𝐭𝐭𝐭�𝐗𝐗𝐧𝐧 � 𝟏𝟏 𝟏𝟏 (2) El contenido del reservorio que resulta de esas operaciones está dado por: 𝐒𝐒 ′ = 𝐒𝐒𝐤𝐤 + 𝐏𝐏𝐬𝐬 − 𝐄𝐄𝐬𝐬 (3) Percolación Una salida por percolación Perc del reservorio de producción es calculada entonces por la ecuación (4). Por lo tanto, el contenido del reservorio se vuelve la ecuación (5), y la cantidad de agua Pr que alcanza finalmente la parte de tránsito del modelo está dada por la ecuación (6). 𝐏𝐏𝐏𝐏𝐏𝐏𝐏𝐏 = 𝐒𝐒′ �𝟏𝟏 − �𝟏𝟏 + � 𝟏𝟏 − 𝟒𝟒 𝐒𝐒′ 𝟒𝟒 𝟒𝟒 𝟗𝟗 𝐗𝐗 𝟏𝟏 𝐒𝐒𝐤𝐤+𝟏𝟏 = 𝐒𝐒 ′ − 𝐏𝐏𝐏𝐏𝐏𝐏𝐏𝐏 � � � 𝐏𝐏𝐫𝐫 = 𝐏𝐏𝐏𝐏𝐏𝐏𝐏𝐏 + (𝐏𝐏𝐧𝐧 − 𝐏𝐏𝐬𝐬 ) Hidrogramas unitarios (4) (5) (6) Pr es dividido en dos componentes de escurrimiento, 90% distribuido por un hidrograma unitario HU1 y un reservorio de tránsito, y 10% por un hidrograma unitario HU2. HU1 y HU2 dependen del mismo parámetro X4, tiempo base del HU1 expresado en días. Las ordenadas de los hidrogramas son calculadas a partir de las curvas S registradas respectivamente como SH1 y SH2, que corresponden a las funciones acumuladas del hidrograma. SH1 es definida en función del tiempo por: Para t ≤ 0, 𝐒𝐒𝐒𝐒𝐒𝐒(𝐭𝐭) = 𝟎𝟎 (7) 𝐭𝐭 Para 0 < t < X4, 𝐒𝐒𝐒𝐒𝐒𝐒(𝐭𝐭) = � � 𝐗𝐗 𝟒𝟒 Para t ≥ X4, 𝐒𝐒𝐒𝐒𝐒𝐒(𝐭𝐭) = 𝟏𝟏 𝟓𝟓� 𝟐𝟐 (8) (9) SH2 es definida de manera similar por: Para t ≤ 0, 𝐒𝐒𝐒𝐒𝐒𝐒(𝐭𝐭) = 𝟎𝟎 ( 10 ) 𝟏𝟏 𝐭𝐭 Para 0 < t < X4, 𝐒𝐒𝐒𝐒𝐒𝐒(𝐭𝐭) = � � 𝟐𝟐 𝐗𝐗 𝟒𝟒 𝟓𝟓� 𝟐𝟐 𝟏𝟏 ( 11 ) 𝐭𝐭 Para X4 < t < 2X4, 𝐒𝐒𝐒𝐒𝐒𝐒(𝐭𝐭) = 𝟏𝟏 − � � Para t ≥ 2X4, 𝐒𝐒𝐒𝐒𝐒𝐒(𝐭𝐭) = 𝟏𝟏 𝟐𝟐 𝐗𝐗 𝟒𝟒 𝟓𝟓� 𝟐𝟐 ( 12 ) ( 13 ) Las ordenadas de HU1 y HU2 son entonces calculadas por: 𝐔𝐔𝐔𝐔𝐔𝐔(𝐣𝐣) = 𝐒𝐒𝐒𝐒𝐒𝐒(𝐣𝐣) − 𝐒𝐒𝐒𝐒𝐒𝐒(𝐣𝐣 − 𝟏𝟏) 𝐔𝐔𝐔𝐔𝐔𝐔(𝐣𝐣) = 𝐒𝐒𝐒𝐒𝐒𝐒(𝐣𝐣) − 𝐒𝐒𝐒𝐒𝐒𝐒(𝐣𝐣 − 𝟏𝟏) ( 14 ) ( 15 ) Donde j es un entero. A cada paso de tiempo k, las salidas Q9 y Q1 de los dos hidrogramas corresponden a la convolución de las lluvias anteriores por la metodología de repartición dada por el hidrograma discretizado y son calculadas por: 𝐐𝐐𝐐𝐐(𝐤𝐤) = 𝟎𝟎, 𝟗𝟗 ∑𝐥𝐥𝐣𝐣=𝟏𝟏 𝐔𝐔𝐔𝐔𝐔𝐔 (𝐣𝐣). 𝐏𝐏𝐏𝐏(𝐤𝐤 − 𝐣𝐣 + 𝟏𝟏) ( 16 ) 𝐐𝐐𝐐𝐐(𝐤𝐤) = 𝟎𝟎, 𝟏𝟏 ∑𝐦𝐦 𝐣𝐣=𝟏𝟏 𝐔𝐔𝐔𝐔𝐔𝐔 (𝐣𝐣). 𝐏𝐏𝐏𝐏(𝐤𝐤 − 𝐣𝐣 + 𝟏𝟏) ( 17 ) Donde l = int(X 4 ) + 1 y m = int(2. X4 ) + 1, con int(.) representando la parte entera. Función de Intercambio con el exterior no atmosférico Un intercambio subterráneo en agua es calculado por: 𝐑𝐑 𝐤𝐤 𝟕𝟕� 𝟐𝟐 𝐅𝐅 = 𝐗𝐗 𝟐𝟐 . � � 𝐗𝐗 𝟑𝟑 ( 18 ) Donde Rk es el nivel en el reservorio al comienzo del paso de tiempo, X3 la capacidad a un día del reservorio y X2 el coeficiente de intercambio en agua que puede ser positivo en el caso de aportes, negativos en el caso de pérdidas hacia las napas profundas, o nulo. En efecto, la interpretación física de esta función de intercambio no es directa. Reservorio de tránsito El nivel en el reservorio de tránsito es modificado agregando la salida Q9 del hidrograma HU1 y F, según la ecuación (19). El mismo se vacía posteriormente mediante una salida Qr dada por la ecuación (20), y el nivel del reservorio se vuelve entonces la ecuación (21). 𝐑𝐑′ = 𝐦𝐦𝐦𝐦𝐦𝐦(𝟎𝟎; 𝐑𝐑 𝐤𝐤 + 𝐐𝐐𝐐𝐐(𝐤𝐤) + 𝐅𝐅) 𝟏𝟏 − 𝐑𝐑′ 𝟒𝟒 𝟒𝟒 𝐐𝐐𝐫𝐫 = 𝐑𝐑′ �𝟏𝟏 − �𝟏𝟏 + � � � � 𝐗𝐗 𝟑𝟑 𝐑𝐑 𝐤𝐤+𝟏𝟏 = 𝐑𝐑′ − 𝐐𝐐𝐫𝐫 Escurrimiento total ( 19 ) ( 20 ) ( 21 ) La salida Q1 del hidrograma HU2 es sometida al mismo intercambio para dar la componente de caudal Qd: 𝐐𝐐𝐝𝐝 = 𝐦𝐦𝐦𝐦𝐦𝐦(𝟎𝟎; 𝐐𝐐𝐐𝐐(𝐤𝐤) + 𝐅𝐅) ( 22 ) 𝐐𝐐𝐤𝐤 = 𝐐𝐐𝐫𝐫 + 𝐐𝐐𝐝𝐝 ( 23 ) El caudal total Q es entonces dado por: Parámetros De la presentación anterior, se deduce que el modelo GR4J tiene cuatro parámetros a calibrar, que son: - X1: capacidad del reservorio de producción (mm) - X2: coeficiente de intercambio subterráneo (mm) - X3: capacidad a un día del reservorio de tránsito (mm) - X4: tiempo base del hidrograma unitario HU1 (Dt, ej. en días) Estructura de actualización Continuando con la ejemplificación a paso de tiempo diario, seguidamente se presenta, según Tangara (2005), el componente de la estructura del modelo hidrológico que tiene en cuenta el proceso de actualización para el pronóstico de caudal. El algoritmo utilizado está esquematizado en la Figura 2, y representa el día de hoy (subíndice 1) en el cual se lleva a cabo la operación de previsión, y el día de mañana en el cual el caudal es pronosticado (subíndice 2). a) Sean P1 y E1 la lluvia y la evapotranspiración potencial observados para hoy. Estas entradas harán evolucionar el nivel del reservorio de suelo S para alcanzar el nivel S1, simulado por el modelo, para el comienzo del día de hoy. Este nivel S1 del reservorio de suelo evoluciona al curso del día para tender hacia el nivel S1 al final del día de hoy, dejando una lluvia neta PR1 como salida del reservorio de suelo S. Esta lluvia neta PR1 es retardada por el hidrograma unitario (HU) que entrega una lluvia PH1 en su salida, que finalmente se agrega al nivel del reservorio de transferencia R. Este nivel R1 del reservorio de transferencia R evoluciona al curso del día para tender hacia el nivel R1 al final del día de hoy, liberando un caudal Q1 simulado, para el día de hoy. b) En realidad, el caudal observado para el día de hoy es O1, es distinto al caudal Q1 calculado por el modelo para este mismo día. c) Entonces, se reajusta el nivel R1 del reservorio de transferencia R hasta alcanzar el nivel R1’ que debería tener, como el nivel de hoy, para entregar el caudal Q1’ igual al caudal O1 observado ese mismo día, y producir el nivel R2’ al final del día. d) El proceso precedente se repite de la misma manera para los días siguiente hasta el final de las observaciones, considerando a cada etapa de nuevas estimaciones como las nuevas condiciones iniciales del modelo. Figura 2.- Esquema del proceso de actualización del modelo GRP DESCRIPCIÓN DEL ALGORITMO DE OPTIMIZACIÓN MULTI-OBJETIVO MOCOM-UA El algoritmo MOCOM-UA (Yapo et al., 1998) es un método de optimización multi-objetivo, basado en la Técnica de los Algoritmos Genéticos. Básicamente consiste en encontrar la Región de Pareto entre dos o más criterios de optimización de un modelo matemático. A continuación se presenta una descripción sucinta del método, asumiendo como criterio de optimización la minimización cuantitativa de dos o más funciones objetivo. Generación de la población inicial Se establece el rango de validez de los parámetros del modelo matemático, que definen un hipercubo de validez de los parámetros. Luego, se genera aleatoriamente una población de puntos con distribución probabilística uniforme en su interior. Clasificación y ordenamiento de los individuos de la población Para realizar la clasificación se evalúa cada una de las FO para cada uno de los puntos de la población. Luego de la evaluación resultarán puntos que tienen menor (o sea, mejor) valor que otros en todas las funciones objetivos tomadas como criterio de optimización, en cuyo caso no cabe duda que estos puntos son mejores que los otros. Pero el problema se plantea cuando se observa que hay puntos que tienen menor valor que otro en algunas FO, pero mayor en otras FO. No puede establecerse un orden de prioridad si hay puntos mejores que otros con el criterio de una de las FO, pero peores con el criterio de la otra. Por ejemplo, supóngase que se tiene dos FO, denominadas FO1 y FO2. Si un punto A tiene menor valor de FO1 que otro B, pero mayor valor de FO2, entonces no puede decirse que A es mejor que B, ni tampoco que B es mejor que A. Entonces surgen los conceptos de puntos Dominados y puntos No Dominados. Son puntos Dominados aquellos tales que existe otro punto que es mejor que ellos en todas las FO. Y por consiguiente, los restantes puntos son No Dominados. Entonces, se eligen todos los puntos no dominados de la población y se dice que forman el Nivel 1. Una vez que se retiran de la población esos puntos no dominados, habrá ahora, otros puntos que son dominados, y otros no dominados. Entonces se retiran los nuevos puntos no dominados y se dice que pertenecen al Nivel 2. Una vez retirados estos puntos no dominados, se toman los restantes y se identifican los nuevos puntos no dominados, y así sucesivamente, hasta que resulte un conjunto de puntos tal que todos ellos son no dominados. De acuerdo al esquema de jerarquización antes explicado, resultará una serie de niveles, y en cada nivel habrá un conjunto de puntos. Entonces se dice que los puntos del nivel 1, son todos mejores que los puntos del nivel 2, y estos mejores que los del nivel 3, y así sucesivamente. Pero no hay manera de identificar cuál de los puntos del nivel 1 es el mejor. Puede suponerse que todos los puntos de un mismo nivel tienen la misma jerarquía. El ranking de este modo logrado se denomina Ranking de Pareto. Construcción de complejos Una vez que los puntos de la población se han jerarquizado en niveles, se les atribuye peso a cada uno de los puntos. Todos los puntos de un mismo nivel tendrán el mismo peso, pero mayor peso que los puntos de niveles inferiores. Luego se eligen tantos complejos como puntos tiene el último nivel. Por ejemplo, supongamos que luego de la jerarquización, se obtengan "n" niveles, y que en el nivel octavo (el último) hayan quedado "q" puntos de la población. Entonces, deben elegirse 25 complejos de la población, tales que, cada complejo debe tener uno de los puntos del último nivel y el resto de los puntos del complejo se eligen de la población aleatoriamente, pero dándole mayor probabilidad de ser elegido a los que tienen mayor peso, o sea, a los mejores. Evolución independiente de cada complejo Una vez que la muestra ha sido separada en "q" complejos, se da a cada complejo la oportunidad de evolucionar en forma independiente mediante una búsqueda local de acuerdo al algoritmo de Nelder y Mead, que se explica seguidamente. Se repite para cada complejo varias veces el algoritmo de Nelder y Mead, siendo el criterio de aceptación o rechazo de un punto que sea no dominado. Por ejemplo, cuando se genera el punto de reflexión, se verifica que no haya ningún punto que tenga menor valor en ambas FO; si es así, entonces se acepta el punto, puesto que es no dominado. Una vez que cada complejo ha evolucionado independientemente, se arma nuevamente la población con todos los complejos cambiados, y se vuelve a ordenar por jerarquía los puntos, para poder nuevamente elegir los complejos que serán vueltos a evolucionar. Así se continúa sucesivamente hasta que no sea posible encontrar puntos dominados. Es decir que todos los puntos de la población se encuentren en el nivel 1 del ranking de Pareto. Como consecuencia, el resultado final de este algoritmo no es un punto óptimo, como lo era el SCE, sino una población óptima de puntos que forma la región de Pareto. Algoritmo de Nelder y Mead Es un método de búsqueda local que se lleva a cabo dirigiendo la evolución de un conjunto de individuos hacia el óptimo local. Una vez que el complejo ha sido seleccionado del modo que se explicó previamente, será sometido a este algoritmo siguiendo los pasos que se explican a continuación. Cálculo del centro de gravedad. Se identifica el peor punto de los "q" individuos del complejo (que es el punto que se tomó del último nivel de la población, como se explicó previamente) y se calcula el centro de gravedad de los (q-1) mejores puntos, mediante la expresión: 1 q −1 g= ∑uj | q − 1 j =1 ( 24 ) Donde uj es el vector posición del individuo j-ésimo, y g es el vector de coordenadas del centro de gravedad de los q-1 mejores puntos. Cálculo del punto de reflexión. Si trazamos un segmento que parta del peor punto del complejo, que pase por el centro de gravedad de los (q-1) mejores puntos, y luego se prolongue más allá del centro de gravedad una distancia igual a la distancia que lo separa del peor punto, obtendremos un punto “r” equidistante al centro de gravedad con el peor punto. Ese punto así obtenido, se denomina punto de reflexión, y su vector de coordenadas de ubicación puede calcularse como: r = 2 g − uq ( 25 ) Evaluación del punto de reflexión. Se calcula el valor de sus dos FO y se compara con los valores de las FO del peor punto. Si es no dominado, el punto r reemplaza al peor, caso contrario, sigue en el paso siguiente. Cálculo del punto de contracción. Como se dijo en el paso anterior, si r fuese peor que el peor punto del complejo, se calculan las coordenadas de un nuevo punto “c” denominado punto de contracción, y sus coordenadas son calculadas de acuerdo con la ecuación: c= (g + u ) q ( 26 ) 2 Este punto está ubicado sobre el segmento que une el centro de gravedad de los (q-1) mejores puntos y el peor punto, equidistante a ambos. Evaluación del punto de contracción. Si el punto c es no dominado, reemplazará al peor punto, en caso contrario, es definido el menor hipercubo que contiene todos los puntos del complejo, y se genera aleatoriamente en su interior un nuevo punto (z). EL CRITERIO DE PERSISTENCIA En los modelos hidrológicos de simulación normalmente se emplea el criterio de Nash-Sutcliffe (ecuación 27) para medir la calidad de un ajuste. Este coeficiente normaliza respecto de la media de caudales calculados. n R = 1− 2 F = 1− F02 ∑ (Q − Qcalc ,i ) ∑ (Q − Qobs ) i =1 n i =1 obs ,i obs ,i 2 ( 27 ) 2 Sin embargo, este coeficiente no es buen indicador para un modelo aplicado al pronóstico porque en pronóstico la medida comparativa que establece la escala de referencia no es el caudal promedio (o la diferencia promedio de caudales) de todo el hidrograma, sino que nos interesa específicamente el tramo de hidrograma en el paso en que estamos pronosticando. En la Figura 3, em y er indican el error del cálculo de caudal y la diferencia entre un valor de caudal y el correspondiente a un tiempo L de diferencia, respectivamente. Q Hidrogr. Observado m1 r2 Hidrogr. Pronosticado m1 r1 m1 L to L to+L L to+2L to+3L t Figura 3.- Descripción de las variables que intervienen en el Coeficiente de Persistencia Se define el “coeficiente de persistencia” como un criterio más racional de evaluación de la calidad del ajuste en un proceso de pronóstico hidrológico, como se muestra en la ecuación 28. 𝐏𝐏𝐏𝐏 = 𝟏𝟏 − ∑ 𝛆𝛆𝟐𝟐𝐦𝐦 ∑ 𝛆𝛆𝟐𝟐𝐫𝐫 ( 28 ) La dimensión er indica la medida de referencia con la cual se adimensionaliza el error de pronóstico. PROPUESTA METODOLÓGICA La calidad de un modelo de pronóstico hidrológico a tiempo real está manifestada principalmente por el grado de precisión en la predicción de los valores de caudal (y nivel) en una determinada sección de interés de un río, con un cierto horizonte de previsión. Ahora bien, dicho proceso está fuertemente ligado a los datos de caudales observados a tiempo real en la sección de aforo. La falta de dichos valores puede originar una caída abrupta de la precisión del pronóstico. Por esa razón, puede tomarse también como otra manera de medir la calidad del modelo de previsión, la capacidad de continuar trabajando con un pronóstico aceptable durante el evento extremo, aún cuando carezca de los valores de caudal medidos a tiempo real. En consecuencia, se propone el estudio de la respuesta del modelo frente a distintos escenarios de previsión. Por un lado, se pretende encontrar el juego de valores de los parámetros que optimiza el modelo empleado frente al escenario de disponibilidad de los datos de caudal, medidos a tiempo real, y por otro lado se pretende encontrar el que minimiza el error cometido en la previsión asumiendo que se pierde la información referida por cualquier motivo. Debido a que el juego de valores de parámetros que optimiza uno de los escenarios referidos no tiene porqué coincidir (y normalmente no coincide) con aquel que optimiza el otro escenario propuesto, se emplea una metodología capaz de encontrar ambos juegos de parámetros y un conjunto de juegos de parámetros que representen soluciones de compromiso intermedias entre las dos condiciones extremas planteadas, obteniendo de este modo la Región de Pareto. El criterio empleado para evaluar el grado de performance del pronóstico es el coeficiente de persistencia. RESULTADOS PRELIMINARES Y COMENTARIOS A los fines de poner a prueba la metodología, se llevó a cabo una optimización con dos objetivos, representados por el criterio de persistencia en ambos escenarios extremos (con y sin datos de actualización), y se encontró la Región de Pareto. La cuenca empleada fue “Le Gardon de St-Jean” (en Corbès, Francia), con una serie de 84.000 datos de lluvia y caudal con paso de tiempo horario. La cuenca referida posee un área de unos 263 km2. Se adoptó un horizonte de previsión de 4 horas. Para la aplicación del algoritmo MOCOM-UA se adoptó una población aleatoria inicial de 150 individuos, y 20 individuos para cada complejo. Conforme el proceso de optimización, la población fue subdividida en complejos 1743 veces, y fueron necesarias 31765 llamadas del modelo hidrológico Génie Rural, en sus modo simulación y previsión por cada llamada. En la Figura 4 se presenta la evolución de la población cada 100 subdivisiones en complejos de la población, y se observa cómo en la última subdivisión es alcanzada la Región de Pareto. Es importante destacar para la adecuada observación de los resultados, que el coeficiente de persistencia puede variar entre un valor de uno, con ajuste perfecto, a menos infinito. Si analizamos la curva envolvente representada por la Región de Pareto, notaremos que se ha alcanzado finalmente dos soluciones extremas: la que optimiza el coeficiente de persistencia (PC) para el modelo en modo simulación, y el que lo optimiza en modo previsión (con datos de caudal a tiempo real). En el primer caso se ha obtenido 0.32, y para el segundo 0.95 aproximadamente. 1 0.95 PC en modo Previsión 0.9 0.85 0.8 0.75 0.7 Subdiv: 100 Subdiv: 200 Subdiv: 300 Subdiv: 400 Subdiv: 500 Subdiv: 600 0.6 Subdiv: 700 Subdiv: 800 Subdiv: 900 Subdiv: 1000 Subdiv: 1100 Subdiv: 1200 0.55 Subdiv: 1300 Subdiv: 1400 Subdiv: 1500 Subdiv: 1600 Subdiv: 1700 Subdiv: 1743 0.65 0.5 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 PC en modo Simulación Figura 4.- Evolución de la población de soluciones optimizada hasta la Región de Pareto De estos valores se deduce en primer lugar que el ajuste, aún con el mejor juego de valores de los parámetros, no es bueno para el caso en que no se disponga de los datos de actualización, mientras que en el otro caso el mejor ajuste fue muy bueno. Otro aspecto que puede destacarse es que el peor valor alcanzado por la población en la Región de Pareto para la condición en previsión es del orden de 0.6, es decir todavía mejor que la mejor condición del modelo en modo simulación. De allí se deduce rápidamente la importancia de los datos de caudal a tiempo real. Sin embargo, si recorremos la curva de Pareto de izquierda a derecha, notamos que al principio su gradiente es suave, con lo cual, se puede permitir un mejoramiento considerable del modelo en modo simulación sin perder calidad el pronóstico del mismo en modo previsión. En palabras numéricas, esto indica que se puede permitir un juego de valores de parámetros que ajusten considerablemente (o tan bien como sea posible) el modelo para que trabaje como si no se dispusiera de datos de caudal a tiempo real, y aún así no se estará sacrificando demasiada calidad en la previsión en el caso de que sí se disponga de esos datos. Por último, puede hacerse algún comentario respecto del algoritmo de optimización relativo a que puede notarse que en las primeras iteraciones el método alcanzó una población con valores muy semejantes a la región de Pareto, aún cuando fue necesario un gran número de iteraciones para llegar finalmente a una población no dominada en su totalidad. Esto indica que de requerir un ajuste de urgencia, puede aplicarse una solución intermedia del proceso de búsqueda de la región óptima mediante un corte prematuro de la ejecución de la búsqueda, para lo cual la herramienta informática debe estar diseñada. REFERENCIAS Alonso, F.J. (2008). Calibración Automática de un Modelo Hidrológico basada en Algoritmos Genéticos, aplicación a dos cuencas típicas argentinas. Tesis de Maestría en Ciencias de la Ingeniería, Mención en Recursos Hídridos. Universidad Nacional de Córdoba. Berthet, L. (2010). Prévision des crues au pas de temps horaire: pour une meilleure assimilation de l’information de débit dans un modèle hydrologique. PhD Thesis de l’Institut des Sciences et Industries du Vivant et de l’Environnement AgroParisTech. Bertoni, J.C. (2004). Curso sobre Gestión de Inundaciones en Áreas Urbanas. Programa de Capacitación para Gestores y Tomadores de Decisión Públicos en el Campo de los Recursos Hídricos. Global Water Partnership, South America - Asociación Mundial del Agua. Le Moine, N. (2009). Description de l’algorithme développé pour le calage automatique du modele CEQUEAU. Rapport intermédiaire n2. Edf-R&D-UPMC. Lilas, D., Perrin C., Andréassian V. (2012). Comparaison et évaluation de trois modèles de prévisions des crues sur le bassin de la Sarre. SCHAPI Service Central d'Hydrométéorologie et d'Appui à la Prévision des Inondations. Mathevet, T. (2005). Quels modèles pluie-debit globaux au pas de temps horaire ? Développements empiriques et comparaison de modèles sur un large échantillon de bassins versants. Thèse de Doctorat, à l'Ecole Nationale du Génie Rural, des Eaux et Forêts, 463 pp. Mouelhi, S. (2003). Vers une chaîne cohérente de modèles pluie-débit conceptuels globaux aux pas de temps pluriannuel, annuel, mensuel et journalier. Thèse de Doctorat, ENGREF, Cemagref Antony, France, 323 pp. Mouelhi, S., Michel, C., Perrin, Ch., Andréassian, V. (2006). Stepwise development of a two-parameter monthly water balance model. Journal of Hydrology 318 (2006) 200–214. Perrin, C. (2000). Vers une amélioration d'un modèle global pluie-débit au travers d'une approche comparative. Thèse de Doctorat, INPG (Grenoble) / Cemagref (Antony), 530 pp. Perrin, Ch., Michel, C., Andréassian, V. (2003). Improvement of a parsimonious model for streamflow simulation. Journal of Hydrology 279 (2003) 275–289. Perrin, Ch., Michel, C., Andréassian, V. (2007). Modèles hydrologiques du Génie Rural (GR). Rapport de Cemagref, UR Hydrosystèmes et Bioprocédés. Tangara, M. (2005). Nouvelle méthode de prévision de crue utilisant un modèle pluie-débit global. Thèse de Doctorat, Ecole pratique des hautes études de Paris - Sciences de la Vie et de la Terre, Paris, 374 pp. Tucci, C.E.M., Ordonez, J.S., Simões, M.L. (1981). Modelo Matemático Precipitaşão-Vazão IPH II Alguns Resultados. Anais IV Simpósio Brasileiro de Recursos Hídricos. ABRH Fortaleza. Yapo, P.O., Gupta, H. V. and Sorooshian, S. (1998). Multi-objective global optimization for hydrologic models. Journal of Hydrology. Vol. 204. Pags. 83-97.