MAQUINAS Y MECANISMOS: Generalidades
Anuncio

67-12 MECANISMOS “B” - UNIDAD I:
Hoja 01 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Profesor Editor: Ing. Rafael A. Schiazzano
El concepto de maquina ha cambiado a través del tiempo con la evolución y aumento de los
conocimientos científicos y técnicos aplicados a su ideación y diseño.
Una definición posible, que abarca la gran variedad de maquinas existentes en el actual estado de
desarrollo, es la siguiente:
*MAQUINA es un conjunto de componentes organizados para consumir energía en las condiciones en
que la fuente puede proveerla y generar con ella un efecto útil de características específicas. Este
efecto útil puede variar controladamente en función del grado de capacidad que tenga la máquina para
conectarse y adaptarse al ambiente que la rodea.
En esta definición solo se ha establecido la creación de un efecto útil a expensas de un consumo de
energía como resultado del funcionamiento de la máquina. No se han especificado las particularidades
de la energía absorbida, ni el carácter de los componentes o de sus relaciones, ni del efecto útil creado
por la maquina.
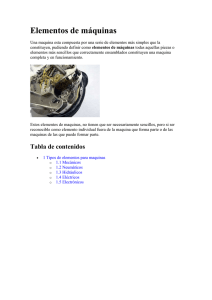
Bajo esta definición caben: un aparejo manual
(máquina simple) que consume y genera
trabajo mecánico (L = F x d), un generador
eléctrico que consume trabajo mecánico y
genera energía eléctrica, un motor eléctrico
que actúa opuesto al anterior, un motor a
explosión alternativo o una turbina de gas que
consumen la energía química contenida en un
combustible y liberada en la reacción de
combustión y la transforman en trabajo
mecánico de rotación o en un impulso
(caso de la turbina de reacción), una grúa
que consume y produce energía mecánica
de distinta característica cinemática una
prensa que transforma energía mecánica en
trabajo mecánico de deformación……….y
una PC que transforma energía eléctrica en
información generada y/o transmitida
por ella al ambiente (pantalla u otros
periféricos) gracias a las señales que
recibe desde el ambiente (teclado,
periféricos en general, web).
67-12 MECANISMOS “B” - UNIDAD I
Hoja 02 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Las maquinas pueden clasificarse de distintas maneras.
En función de las características de la energía absorbida y el efecto útil entregado, de las
características de los componentes, del tipo de relación entre ellos en funcionamiento, del grado de
intercambio de información con el ambiente.
*Nos ocuparemos aquí fundamentalmente de las que llamaremos MAQUINAS MECANICAS
OPERADORAS: Maquinas que reciben energía mecánica con características cinemáticas definidas
(en general estándar) y que mediante la interacción de “componentes mecánicos” organizados
transforman la energía recibida en trabajo mecánico con características cinemáticas y dinámicas
adecuadas a la función para la que esta diseñada la maquina. Es el caso de una grúa para mover
cargas, una prensa para conformar piezas de chapa metálica por deformación plástica, un centro de
mecanizado para conformar piezas por arranque de viruta, una cinta transportadora, etc.
*COMPONENTES MECANICOS: Son cuerpos sólidos que intercambian fuerzas y movimientos a
través del contacto entre sus superficies.
EL ESTUDIO DE LA CINEMÁTICA, DINÁMICA Y DIMENSIONAMIENTO DE ESTOS
COMPONENTES MECÁNICOS ANALIZADOS INDIVIDUALMENTE (ELEMENTOS DE MAQUINAS) O
EN GRUPOS INTERACTUANTES (MECANISMOS) ES EL OBJETO DE ESTA MATERIA.
Es una materia de aplicación especifica de conocimientos adquiridos en estudios de Física Mecánica y
de Resistencia de Materiales por lo que se espera de los alumnos un adecuado conocimiento de esas
disciplinas.
Existen métodos mas modernos, exactos y rápidos de análisis y calculo (Teoría de Elasticidad,
Mecánica de Fractura, FEM, simulación computacional de cinemática y dinámica de sólidos) que son
de aplicación habitual en la practica profesional. No obstante la resistencia de materiales es un modelo
simplificado del comportamiento de sólidos bajo carga aplicado al dimensionamiento de componentes.
Junto con un apropiado análisis aplicando física mecánica provee resultados confiables y permite
aplicaciones con resultados reales, adecuados para las prácticas de alumnos de Ingeniería. Además
muchas de las normas de dimensionamiento bajo las que deben proyectarse las maquinas se crearon
históricamente en el “ambiente” de la Resistencia de materiales y conservan su estructura aunque
reajusten sus resultados mediante técnicas mas exactas.
Los métodos que se aplicaran resultan también aplicables en el diseño y análisis de las:
*MAQUINAS GENERADORAS MECANICAS en las que el concepto funcional es provocar un cambio
en el tipo de energía (química, eléctrica, atómica, mecánica) que entregan respecto de la absorbida
siendo al menos una de ellas (entrante o saliente) mecánica.(motor eléctrico, generador eléctrico).
En estas maquinas los conceptos teóricos básicos de los procesos que se desarrollan en ellas y que
determinan las dimensiones criticas de sus componentes principales (ej: diámetro del rotor en una
turbina de gas) corresponden a otras disciplinas científicas (combustión, termodinámica,
fluidodinámica). Aun así el proyecto de esos componentes deberá responder a las solicitaciones a que
resulte sometido y la transformación de o a energía mecánica requerirá incorporar a esta maquina
componentes mecánicos, los métodos aquí desarrollados son aplicables a estos fines.
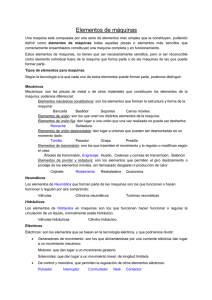
*MECANISMO: Es un conjuntos de componentes mecánicos (eslabones) organizados (articulados
entre si) para transmitir movimiento desde el componente de “entrada” hasta el de “salida” modificando
las características cinemáticas del movimiento de entrada para obtener las de salida que en general
son distintas.
El concepto básico del mecanismo es la transformación de la cinemática del movimiento (trayectoria,
velocidad, aceleración, impulso) para ajustarla a la necesidad específica del trabajo que entrega la
maquina. No obstante cada eslabón del mecanismo deberá dimensionarse (por ej mediante el método
de resistencia de materiales) para resistir las fuerzas que requiera el trabajo útil “entregado”. El
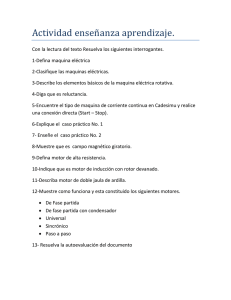
mecanismo de empuje y posicionamiento para los rodillos P es un ejemplo:
67-12 MECANISMOS “B” - UNIDAD I
Hoja 03 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
El disco W es el eslabón de entrada con movimiento giratorio continuo con velocidad angular w y
centro A.
La forma y dimensiones entre articulaciones
K
de las piezas K, L, M y N genera
dos movimientos sincronizados en los
eslabones de salida K y L.
1)En cada giro de W el eslabón K
es el eslabón intermedio de un
movimiento de “doble manivela” que tiene por resultado
un movimiento de empuje de longitud fija
sobre los rodillos P.
2) El eslabón L actúa como un balancín
(rotación parcial con centro D con
sentido cambiante durante el ciclo) que
recibe el rodillo P al salir de la mesa
empujado por K y lo deposita en otra
mesa (no representada) a la izquierda
del mecanismo. Allí otro mecanismo
(no representado) retira el rodillo P del
eslabón L antes que retorne a la
posición inicial E (recibir otro rodillo).
N
L
M
El concepto del diseño es lograr la transformación de los movimientos, pero además deben
dimensionarse cada uno de los componentes para soportar las fuerzas que transmiten.
*ELEMENTOS DE MAQUINAS: Cada uno de los componentes individuales que forman una maquina.
Siempre forman parte de conjuntos mayores, los cálculos para su proyecto dependen de las
solicitaciones particulares a que están sometidos.
En muchos casos son los componentes de mecanismos cuyas características cinemáticas están
perfectamente definidas (se relacionan siempre con movimientos lineales o de rotación continua) y
consecuentemente para definir sus dimensiones no se usa el método genérico de análisis de
mecanismos sino cálculos específicos de cada uno, en general resistenciales.
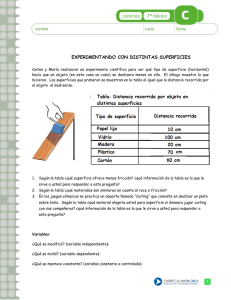
No obstante siempre puede analizarse un elemento de maquina como un mecanismo de 4 eslabones
articulados. Por ejemplo el análisis de una correa de transmisión y su correspondiente polea puede
durante una rotación infinitesimal de la polea representarse con el siguiente mecanismo. El análisis
teórico como mecanismo resulta poco útil en la práctica ya que los eslabones del mecanismo cambian
de dimensiones y posición a medida que la polea gira, obligando a un replanteo total del modelo
matemático
3
2
4
F1
.
.
F2
1 bancada
67-12 MECANISMOS “B” - UNIDAD I
Hoja 04 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
CARACTERISTICAS MECANICAS EXTERNAS - ENERGIA – TRABAJO – POTENCIA:
*Se llaman características externas de las maquinas a las magnitudes que permiten evaluar el trabajo
mecánico que pueden entregar y la rapidez con que lo entregan. Se las llama externas porque no se
relacionan con las características de diseño de la maquina (distintos diseños pueden cumplir igual
función), miden desde el exterior su capacidad (caja negra). A fines de comparación deben ser las
mismas para maquinas de igual trabajo útil y deben expresarse cuantitativamente.
La energía o el trabajo mecánico recibidos y/o entregados se transmiten, en las maquinas mecánicas,
con dos características cinemáticas simples (traslación y rotación), o a una combinación de ellas en
cada instante en el caso en que el útil de la maquina desarrolle trayectorias complejas (rototraslación).
Sin computar perdidas se expresa:
L ~ E = F * d = Mt * θ
En unidades S.I
F fuerza en Newton;
Mt momento torsor (cupla) en Nt.mt;
L trabajo mecánico lineal y
d desplazamiento en mt;
θ rotación en rad (radian);
E energía absorbida en Nt*mt
*La cupla Mt o la fuerza F son las características externas propias de la maquina (d y θ varían con el
transcurso del tiempo).
*La real productividad de una maquina se mide por la rapidez con que entrega el trabajo por lo que la
velocidad (rotación-traslación) y la potencia son las otras características externas típicas
Potencia N = E/tiempo = L/tiempo = F * d / tiempo = F * V = Mt * θ /tiempo = Mt * w
V = d/tiempo
velocidad lineal en mt/seg
w = θ /tiempo velocidad angular en rad/seg
N
potencia en Nt x mt / seg = Watt
En unidades S.I.
son las características mecánicas externas que caracterizan una maquina.
Puesto que la potencia es la relación entre las otras dos se necesita conocer al menos dos de ellas
para conocer con precisión la capacidad y productividad de una maquina.
*En definitiva
cupla (Mt), velocidad angular (w) y potencia (N);
fuerza (F); velocidad lineal (V) y potencia (N),
o bien
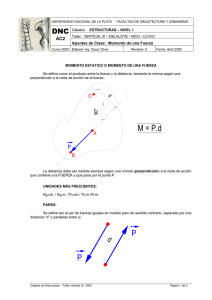
Ejemplo: Limadora
C
Fsal; Vsal
C
E
D
Ment; went
M2, w2
67-12 MECANISMOS “B” - UNIDAD I
Hoja 05 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Las características externas sirven para la elección de la maquina estándar adecuada para un trabajo
determinado. Además aplicadas al proyecto de una maquina en particular sirven para determinar los
esfuerzos a que esta sometido cada uno de los componentes y dimensionarlo.
En el ejemplo de la limadora las características del material de la pieza D a mecanizar, las
características del material y la geometría de la herramienta E (fija al torpedo C de movimiento lineal) y
la sección de la viruta que se desea arrancar en cada pasada, permiten estimar la fuerza de arranque
y la velocidad recomendable (necesaria y/o posible) del torpedo.
Son datos tecnológicos del proceso y son las características a la salida de la maquina, Fsal y Vsal
resultando la potencia Nsal = Fsal * Vsal.
Evaluadas en forma elemental sin tomar en cuenta pérdidas mecánicas ni condiciones de operación
(ver PERDIDAS Y RENDIMIENTO MECANICO Y FACTORES DE SERVICIO) indican
Nent = Nsal = Ment * Went.
Aplicadas al cálculo de un componente permite dimensionarlo: la correa que transmite movimiento
entre el eje del motor y el eje 2 se dimensiona en base a Mtent y went por el método de cálculo
correspondiente.
En un sentido mas preciso, apto para evaluar procesos transitorios que cumpla la maquina, se llama
característica mecánica a la curva “Cupla vs. velocidad angular”. Es una función univoca ya que a
cada valor de w le corresponde un único valor posible de cupla (salvo sistemas de control accesorios)
CINEMATICA Y DINAMICA GENERAL DE LA MAQUINA OPERADORA MECANICA:
Cuando la resistencia que se opone al útil de una maquina en funcionamiento es constante se
establece un estado de equilibrio dinámico en el cual la potencia Nsal (trabajo por unidad de tiempo),
la cupla Mtsal y la velocidad angular wsal (o las Fsal y la velocidad lineal vsal) de salida entregadas en
el útil son constantes y proviene de la Nent = Nmot absorbida por la maquina de la planta motriz.
La potencia de entrada Nmot difiere de la de salida Nsal solo por las perdidas que se evalúan por el
rendimiento (ver PERDIDAS Y RENDIMIENTO MECANICO).
Si bien la potencia Nmot ≈Nsal; las velocidades angulares y cuplas de entrada y salida son en general
distintas y deben ajustarse, como parte de la función de la maquina, a partir de los valores de entrada
para obtener los valores necesarios en la salida.
Los valores de Mtent y went dependen de la “característica mecánica” del motor que es “fija”.
En la mayoría de los casos, por los principios físicos en que se basan las plantas motrices o por
diseños que procuran reducir sus perdidas mecánicas, las velocidades angulares son mayores y las
cuplas son menores en los ejes de los motores a las necesarias en el útil de la maquina.
(Caso opuesto es el de los grandes generadores eólicos de eje horizontal en los cuales la potencia del
viento se absorbe en el eje de las aspas que giran a baja velocidad y alta cupla y deben ajustarse a
velocidades de giro mucho mayores para accionar el generador de electricidad accionado).
En todos los casos una “maquina operadora mecánica” esta formada por dos partes principales:
Parte 1)(P1) “TRANSMISION MECANICA”: Entre el motor y el mecanismo del útil se encuentra la
“transmisión mecánica” en la que se ajustan (modifican) las velocidades y cuplas; en ella los
movimientos son de rotación.
El movimiento de rotación es el adecuado para transmitir energía mecánicamente porque es continuo.
No necesita inversiones de dirección y no aparecen las fuerzas de inercia que acompañan un frenado
y arranque en dirección opuesta imprescindibles en movimiento lineal. Además durante una rotación a
velocidad angular constante solo aparece una aceleración centrifuga (señala siempre al centro de
rotación) que no genera fuerzas de inercia que resistan el movimiento.
67-12 MECANISMOS “B” - UNIDAD I
Hoja 06 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Por ser la potencia igual a la entrada y a la salida (salvo perdidas) la variación en un sentido de la
magnitud de la velocidad angular, en el caso más habitual reduce, implica variación en sentido opuesto
de la cupla, en el caso habitual aumenta.
Nent = Mtent * went ≈ Msal1 * Wsal1 = Nsal1
Las transmisiones mecánicas se denominan genéricamente “variadores mecánicos de cupla y
velocidad angular” y en el caso mas común se los llama “reductores de velocidad” angular o
“multiplicadores de cupla” por ser esas sus funciones en particular.
El movimiento de rotación en los variadores se transmite de un árbol (eje) a otro mediante Elementos
de Maquina diseñados a ese fin: correas y poleas, poleas fricción, cadenas, engranajes, hasta
alcanzar valores adecuados.
La “relación de transmisión” m, es la medida del cambio que se produce en cada característica
mecánicas del movimiento causado por la trasmisión mecánica. Se define:
m = went / wsal = Msal / Ment
Definida así es mayor que 1 para el caso habitual de reducción de velocidad, puede definirse por el
cociente inverso.
Parte 2)(P2) MECANISMO DEL UTIL: En el útil el movimiento necesario no es por lo general rotación y
por lo tanto se requiere de un Mecanismo diseñado específicamente para obtener la característica
cinemática y dinámica necesaria.
En el ejemplo del mecanismo de empuje y posicionamiento solo se ha representado la Parte 2 de la
maquina, la velocidad w del disco W ya esta ajustada por una transmisión mecánica previa no
representada. En el ejemplo de la limadora la went (y Ment) del eje motor se modifica en la Parte 1,
“transmisión mecánica” por correa (y una transmisión por engranajes internos no visible en la figura)
hasta alcanzar los valores w2 (y M2). Estas últimas son las magnitudes de entrada a la Parte 2 mecanismo articulado del útil, formado por la manivela 2, el cubo 3, los balancines 4 y 5 y el cubo 6
que es el torpedo de la limadora. En el mecanismo el movimiento cambia de características
cinemáticas y el torpedo se mueve linealmente a Vsal y “empuja” a la herramienta con fuerza Fsal.
Todo montado en el eslabón 1 que es la bancada general de la maquina.
De acuerdo a lo anterior un diagrama genérico que representa el conjunto de un motor y la “maquina
operadora mecánica” accionada es el siguiente.
P2
P1
67-12 MECANISMOS “B” - UNIDAD I
Hoja 07 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
FUERZAS DE ROZAMIENTO o FRICCION:
La fuerza de rozamiento entre sólidos aparece entre dos superficies en contacto (recuerde la definición
de componente mecánico) con movimiento relativo tangencial posible entre ellas, se opone siempre a
ese movimiento relativo y según su magnitud puede o no impedirlo.
Existen elementos de maquinas que utilizan las fuerzas de rozamiento como medio para transmitir
trabajo mecánico (fuerza y movimiento). Se proyectan para desarrollar fuerzas de rozamiento,
tangenciales a superficies de contacto, de magnitud insuficiente para provocar el movimiento relativo
(resbalamiento) entre ellas. De esta manera al moverse una de las superficies “arrastra” sin
resbalamiento a la otra transmitiendo movimiento y fuerza. Ej: correa sobre polea.
En todos los Elementos de maquinas inevitablemente por su geometría y movimientos relativos
aparecen fuerzas de rozamiento que no impiden el movimiento tangencial entre superficies, en estos
fenómenos se genera trabajo negativo y consume energía por fricción que se pierde sin efecto útil y/o
provoca desgaste de las superficies.(ver Perdidas Mecanicas – Rendimiento - Factor de Servicio).
Ej: flanco de engranajes.
Los movimientos típicos entre superficies en contacto para los que se estudia el fenómeno de
rozamiento y fricción son deslizamiento lineal y rodadura.
Trataremos aquí el caso de rozamiento en seco, la presencia de lubricantes afecta el fenómeno de
fricción reduciendo la resistencia por rozamiento y el rozamiento interno en los fluidos es un tema de
estudio en si mismo. (ver COJINETES DE DESLIZAMIENTO)
a) Caso de deslizamiento lineal seco: La resistencia se debe a la rugosidad de las superficies a nivel
macroscópico, perfeccionable mejorando las terminaciones superficiales de las piezas y a nivel
submicroscópico causadas por las irregularidades de las superficies de las estructuras cristalinas.
Aparecen así fuerzas opuestas al movimiento en el plano tangente común a las superficies en la zona
de contacto, sea este puntual, lineal (casos teóricos ideales), o de superficie.
La magnitud de esta fuerza de rozamiento resulta: a) independiente del área en contacto de las
superficies, b) directamente proporcional a la componente perpendicular al plano tangente común a las
superficies de la fuerza que se transmite entre ellas y c) dependiente de las características de los
materiales de las superficies.
Experimentalmente se ha comprobado que existe un valor máximo µf (coeficiente limite de fricción
estático) que define el valor máximo Ff de la fuerza tangencial de resistencia al deslizamiento.
Es la máxima fuerza que se puede transmitir por fricción sin resbalamiento entre dos superficies. Es la
máxima transmisible en los Elementos mecánicos que utilizan este efecto.
-Experimentalmente: se aplica una fuerza Ft creciente
y en el instante previo al resbalamiento se expresa:
Ft = Ff = W * µf
Para fuerzas externas de empuje tangencial Ft < Ff
no hay movimiento relativo entre las superficies y se
interpreta que el coeficiente de fricción es menor al
limite, µ < µf y aumenta con Ft hasta el limite µf
Ft = W * µ < µf * W
= Ff
Cuando el valor de la fuerza externa Ft supera Ff y permanece constante (Ft cte) una de las
superficies presenta inicialmente un movimiento relativo tangencial acelerado aumentando
continuamente la velocidad relativa. Esto implica, siendo W constante, una reducción de la resistencia
al deslizamiento a un valor menor y se explica por una reducción en el valor de µfd < µf, con µfd
constante.
Experimentalmente se observa que reduciendo el valor de la fuerza externa de empuje tangencial Ft
una vez comenzado el deslizamiento, se alcanza un estado de equilibrio dinámico, (vdt: velocidad
67-12 MECANISMOS “B” - UNIDAD I
Hoja 08 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
--------------------------------------------------------------------------------------------------------------tangencial relativa cuasiconstante) cuando la resistencia dinámica Ffd iguala a Ft. En esta condición se
puede medir el valor del coeficiente de fricción dinámico µfd
Ft = Ffd = µfd * W
Un análisis experimental mas detallado muestra que µfd es variable para distintos valores de la
velocidad de deslizamiento, µfd = ƒ (vdt) pero que tiene una rápida tendencia a estabilizarse en un
valor cuasiconstante. Para proyectar los Elementos mecánicos de transmisión de potencia por fricción
interesa µf, límite de fricción estático.
ACUÑAMIENTO:
Un concepto frecuentemente aplicado en proyecto basado en fuerzas de fricción es el efecto de
acuñamiento, que se aplica para inmovilizar entre si piezas poniendo en contacto entre ellas
superficies cónicas.
Un ejemplo de la aptitud de este método son el “cono Morse” normalizado DIN y el cono normalizado
ISO utilizados universalmente para inmovilizar un portaherramientas al husillo de la maquina para
transmitir la potencia con movimiento de rotación con la cupla de torsión necesaria para el mecanizado
en maquinas herramienta y centros de mecanizado.
NOTA: En las graficas se representa uno de los infinitos planos coaxiales existentes y en ese plano
(por razones de claridad en la grafica) solo una de cada de cada tipo de fuerzas generadas, sabiendo
que en el plano representado existen, en realidad, dos de cada tipo simétricas respecto del eje.
A la izquierda la figura del cono morse aplicado a una perforadora. La fuerza R de montaje genera la
fuerza W normal a la superficie cónica. Esta, a su vez, genera dos fuerzas de fricción tangenciales en
toda la superficie del cono (ver NOTA). El 1r tipo: representada por el vector W * µ que, una vez
67-12 MECANISMOS “B” - UNIDAD I
Hoja 09 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
establecida en el montaje, mantiene unidos herramienta y portaherramientas en sentido axial aunque
R desaparezca y la 2da: representada por el símbolo
(un vector normal “saliente” del plano del
corte) que transmite por fricción la rotación del husillo de la maquina a la herramienta o
portaherramienta. Las fuerzas de 1er y 2do tipo son de igual magnitud.
A la derecha un cono ISO típico de portaherramientas intercambiable de centro de mecanizado: en la
zona A hay un dispositivo para fijar la herramienta. La tracción R genera la fuerza W con iguales
resultados que en el cono morse.
Las fuerzas de 1re y 2do tipo son suficientes para cumplir las funciones mencionadas, no obstante
dependen de que el contacto entre ambas superficies sea perfecto. Las vibraciones o impactos
pueden inducir deformaciones elásticas de duración ínfima en las piezas, separando las superficies
cónicas. La separación hace desaparecer instantáneamente las fuerzas de fricción, que no vuelven a
establecerse (proceso de acuñado) por si mismas.
Por esta razón debe mantenerse la fuerza R durante la operación de la maquina: en la perforadora la
fuerza R se mantiene naturalmente por la reacción del material perforado ante el avance de la broca y
en el caso del cono ISO en la zona B la maquina tiene un dispositivo de tracción que mantiene
continuamente la fuerza R (importante en el caso de fresas tangenciales).
El ángulo de conicidad es determinante en el valor de las fuerzas tangenciales resultantes del
acuñamiento, esta estrictamente normalizado tanto en el cono morse DIN como en el ISO, es el
ángulo
Se analiza la relación de este ángulo con el fenómeno de acuñamiento y retención.
En el análisis de superficies conicas en cualquier plano coaxial solo las fuerzas del 1er Tipo ya que al
analizar el estado de equilibrio en ese plano las dos fuerzas de 2do tipo son perpendiculares al plano,
iguales y de sentido opuesto. Por esta razón no hay ecuación de proyección de fuerzas (suman cero)
y su único resultado neto es la cupla torsora coaxial.
El siguiente grafico y cálculos permite relacionar las fuerzas de fricción 1er tipo, las normales W y las
de montaje (acuñamiento) R en el caso de un tetraedro con sección de cuña triangular macho (hacha),
en una oquedad de igual forma. Las fuerzas tangenciales de 2do tipo perpendiculares al plano de la
figura aquí no existen.
Si no se impone una fuerza externa R no se establecen las fuerzas de fricción entre las superficies por
el mero contacto. Las fuerza µ * W indicadas representan la resistencia a la penetración de la cuña
(hacha en la madera). (fueras de 1er tipo en el cono)
67-12 MECANISMOS “B” - UNIDAD I
Hoja 10 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Una vez completado el acuñamiento aunque se retire la fuerza R la cuña (el cono) queda retenido en
la oquedad, salvo que se haga una fuerza opuesta de mayor magnitud o se produzca una separación,
por minima o temporaria que sea, de las superficies.
La siguiente figura muestra el estado una vez producido el acuñamiento y retirada la carga externa R,
se observa que el único resultado neto de la composición de las fuerzas es una fuerza coaxial igual a
la fuerza externa de acuñamiento. Las componentes W + µ * W son las reacciones netas del cuerpo
por deformación elástica generada en el acuñamiento.
El valor del ángulo de acuñamiento (ya se expreso que esta rigurosamente normalizado) no solo
determina el valor de la fuerza de retención del acuñado, sino que determina si se establece o no el
acuñamiento. El repaso de Física Mecánica que sigue demuestra la relación del ángulo con la fricción.
Por acción de su peso R el cuerpo apoyado sobre
el plano inclinado genera una componente de
fuerza normal W y una tangencial Wt a la superficie
del plano de apoyo que varían con el ángulo del
plano.
W = R * cos α
Wt = R * sen α
La componente tangencial Wt tiende a provocar el
deslizamiento del cuerpo sobre el plano.
La componente normal W genera una fuerza de
fricción que se opone al deslizamiento de cuerpo
µ * W = µ * R * cos α
Teniendo en cuenta que µ (medida de la fricción relativa) es función de los materiales en contacto y no
cambia con el estado de carga (lo que cambia es el valor total de la fuerza de fricción), se puede
determinar para el estado de equilibrio limite (máxima inclinación del plano sin deslizar)
Ff = µ * W = -Wt
µ * R * cos α = R * sen α
µf = sen α / cos α = tg α
67-12 MECANISMOS “B” - UNIDAD I
Hoja 11 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Hay un ángulo α característico para cada par de materiales por encima del cual se produce
inevitablemente el deslizamiento entre sus superficies (en el ejemplo anterior no importa cuanto pese
el cuerpo).
Esto significa, en las aplicaciones del tipo de las vistas (cono morse y ISO) que se presentan en las
maquinas, que la conicidad proyectada no podrá superar el valor del ángulo cuya tg coincida con µf.
La siguiente tabla muestra resultados experimentales (hay dispersión de resultados en distintas
experiencias) e incluye el efecto lubricante del agua (como parámetro) las temperaturas y las
presiones normales máximas que soportan los materiales en que los valores µf son estables.
b) Caso de deslizamiento por rodadura: El supuesto inicial de Herthz para el calculo de tensiones de
contacto en el caso estático: “Ningún material se comporta como un rígido perfecto al estar en
contacto con otro con una fuerza de compresión normal a la superficie en el contacto”, lo condujo a la
idea de una distribución de presiones en el área de contacto simétrica respecto a la línea de acción de
la fuerza supuesta concentrada.
En el caso de existir (además de la fuerza normal a la
superficie W) una fuerza transversales a la normal
instantánea que tienda a generar rodamiento (F) y teniendo
en cuenta los fenómenos de superficie mencionados en el
caso de deslizamiento lineal, la distribución de presiones en
la superficie de contacto no es simétrica respecto a la recta
de acción de la fuerza normal (W) y consecuentemente la
recta de acción de la reacción concentrada equivalente (N)
de esta distribución de presiones no coincide con la de la
fuerza normal que le dio origen (W).
Las fuerzas W y N paralelas y la distancia que las separa
µr forman un par que se opone a la rotación.
El par de oposición es función lineal de W (y N igual y
opuesta) y del par de materiales de las superficies en
contacto. Las características de los dos materiales y de sus superficies definen la “distancia” µr entre
ellas, este es el “coeficiente estático de resistencia a la rodadura” o “coeficiente estático de fricción por
rodadura”.
Para que haya rodadura pura debe ser F < Ff (Ff = µf * W - fuerza máxima de fricción por
deslizamiento estático), caso contrario (F > Ff) se producirá rotótranslación (rotación y deslizamiento
tangencial) ya que el máximo par requerido por la rodadura será Cr = Ff *r (r = radio de la rueda) y el
∆F = F - Fr sobrante se aplicara a generar deslizamiento sin rotación.
67-12 MECANISMOS “B” - UNIDAD I
Hoja 12 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Par de rotación:
Cr = F * r ≤ Ff * r = µf * W * r
Par opuesto por fricción
Mr = W * µr
(1) con sentido horario.
Valores de µr
La condición limite de comienzo el rodamiento F * r = W * µr
F = W * µr / r = W * k (2)
En que k es un “coeficiente estático de rodadura”. Es función no solo de las características de los
materiales sino también de la geometría (radios y perfil transversal de las superficies).
Tiene en rodadura igual relación con W que el coeficiente µf en la fricción por deslizamiento lineal. Por
esta razón, especificando sus condiciones de aplicación particulares (diámetro y forma de las ruedas)
se lo ensaya y utiliza en campos específicos (industria ferroviaria, automotriz, de rodamientos, etc).
Recordando que debe ser F ≤ Ff de las ecuaciones (1) y (2) resulta la condición
µr ≤ µf * r (3)
La experimentación demuestra que µr <<<< µf (entre 100 y 1000 veces menor) lo que genera un
amplio campo para el diseño de mecanismos o elementos de maquinas que utilicen “ruedas”
cumpliendo la condición de la ec. (3) (rodamiento sin deslizamiento).
Comparando un tetraedro rectangular y uno cilíndrico de igual masa apoyados en un plano inclinado,
resulta intuitivo que el rodillo comienza a rodar con menor pendiente del plano que el tetraedro
(µr < µ) y que esa fuerza también depende del diámetro del cilindro.
Igual que en el caso de deslizamiento lineal la resistencia por rodadura deja de aumentar cuando se
inicia el movimiento, aunque en este caso tiende a permanecer constante o sufre una reducción de
magnitud menor.
PERDIDAS MECANICAS – RENDIMIENTOS - FACTOR DE SERVICIO:
Las perdidas de energía mecánica características de estas maquinas se originan básicamente en
perdidas por fricción en las superficies de contacto sus componentes mecánicos (vínculos). Existen
otras causas habitualmente de menor significación (aunque su importancia relativa depende de la
maquina en particular):(Ver apunte Perdidas Mecánicas - Rendimientos - Factor de Servicio)
FACTORES DE SEGURIDAD: Tanto los Rendimientos como los Factores de Servicio se determinan
en base a condiciones o características de las maquinas o las condiciones de operación definibles por
el ingeniero proyectista o el ingeniero a cargo de organizar un proceso industrial.
Los factores de seguridad son usados por el proyectista, se incluyen como un factor numérico que
aumenta la solicitación o disminuye la resistencia del material en los cálculos dimensionales.
67-12 MECANISMOS “B” - UNIDAD I
Hoja 13 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
A diferencia de los anteriores no se fija en función de causas definidas sino, por el contrario, en las
indeterminaciones del proyecto:
1) Las propiedades de los materiales se representan por números que son medias estadísticas y están
acompañadas por la correspondiente incertidumbre (variable con la esperanza matemática que se
adopte),
2) distintos modelos físicos y matemáticos que se emplean en los cálculos responden a la realidad con
distintos grados de exactitud,
3) en los proyectos con innovación importante pueden aparecer fenómenos desconocidos.
Estas y otras causas desconocidas se reflejan en el Factor de Seguridad que es fijado por el
proyectista en función de su experiencia, por analogía con otros proyectos exitosos y en algunos casos
por recomendaciones de normas.
Eventualmente los tres factores mencionados (rendimiento, Factor de servicio, Factor de seguridad)
se unifican y a veces se confunden, por error o porque figuren unificados en alguna recomendación de
normas. Aquí se los ha diferenciado para aclarar su origen y diferenciar la función que cumplen en el
trabajo del profesional proyectista o usuario.
CARACTERISTICAS MECANICAS EXTERNAS TIPICAS DE MAQUINA MOTRIZ Y OPERADORA
La elección del maquina motriz adecuado para una maquina operadora consiste en buscar una
solución de compromiso entre las características mecánicas de esas maquinas por ser una y otra fijas.
Los sistemas de regulación y control prestan elasticidad en distinta medida a la característica
mecánica de las maquinas motrices. No obstante aquí solo analizaremos la aplicación de motores sin
regulación como principio conceptual.
Una vez alcanzada la condición de trabajo se establece un equilibrio dinámico entre motor y carga en
el que se entrega una cupla y velocidad constante.
Las curvas características mecánicas motriz y resistente son más importantes en los procesos
transitorios en los que el desequilibrio entre la cupla motriz y la resistente (para cada velocidad del
transitorio) genera aceleraciones o deceleraciones que deben regularse de acuerdo a las necesidades.
CURVAS CARACTERISTICAS MECANICA DE MOTORES ALTERNATIVOS A EXPLOSION
La curva genérica didáctica muestra las
características típicas de estos motores.
La curva corresponde a un estado
particular de alimentación (calibración de
carburador o inyección)
-wmin: el motor no puede funcionar por
debajo de esa velocidad,
. A menor velocidad las se generan
desequilibrios por inercia de los
componentes que provocan movimiento
irregular y las perdidas por fricción son
altas
-wmax: si bien puede funcionar por encima
de ese valor la potencia y la cupla caen
rápidamente, el consumo aumenta y aumentan las fuerzas de inercia y fricción sobre los
componentes.(pudiendo llegar a consumir el total de la energía útil, punto D)
Los puntos de cupla máxima, de potencia máxima y de menor consumo no coinciden. Para distintos
valores de calibración de alimentación de combustible aparecen curvas aproximadamente paralelas.
67-12 MECANISMOS “B” - UNIDAD I
Hoja 14 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
En general se procura regular estos motores para que operen en la banda que se encuentra entre las
velocidades de potencia máxima y de consumo mínimo.
CURVA CARACTERISTICA MECANICA DE MOTORES ELECTRICOS
Curva cupla – velocidad angular de
motores eléctricos asincrónicos
trifásicos según clasificación NEMA.
Los tipos responden a distintos
diseños de “jaula de ardilla” del rotor.
*La cupla nominal es aquella en que
el motor puede trabajar en forma
continua en equilibrio térmico a
temperatura menor al límite
correspondiente a su Tipo NEMA y
se presenta a una velocidad de
rotación única nn.
Se procura con una buena elección del motor que el estado de equilibrio de operación corresponda a
la cupla nominal del motor, para el caso genérico de maquinas que funcionan en forma continua
durante periodos largos con arranques y paradas poco frecuentes.
Las curvas Mn-w son funciones univocas propias del diseño del motor.
ws es la velocidad sincrónica, en general w se expresa por la frecuencia n de giro en r.p.m.,
Tipo A tiene cupla entre 150 y 170 % de la cupla nominal y soporta sobrecargas importantes en
periodos cortos. Ej. Maquinas inyectoras de plástico o metales.
Tipo B cupla de arranque ligeramente superior con menor cupla máxima. Se diferencia por requerir
menor circulación de corriente en arranque u otras sobrecargas y tener buen rendimiento y factor de
potencia a cupla nominal.
Tipo C mejor cupla con baja corriente en el arranque. Se observa una apreciable variación de cupla
con la corriente. Se aplica a maquinas con carga pesada y bajas sobrecargas.
Tipo D mayor cupla de carga del grupo con gran variación de la cupla con la velocidad, es un motor
menos utilizado para maquinas con alta resistencia de arranque o sobrecargas con reducción de
velocidad por ejemplo prensas mecánicas a volante (balancines).
----------------------------------------------Curvas cupla-velocidad angular en motores eléctricos de corriente continua
Motor conexión serie
Motor conexión en paralelo o compound
67-12 MECANISMOS “B” - UNIDAD I
Hoja 15 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
CURVAS CARACTERISTICAS TIPICAS DE RESISTENCIAS MECANICAS (CARGAS OPERATIVAS)
Las características mecánicas (Mt/w) de las cargas que deben soportar las maquinas operadoras en
funcionamiento son muy variadas y son funciones univocas propias de ese trabajo útil requerido. De
entrada en la maquina operadora.
Para compararlas correctamente con las de los motores de accionamiento estas características deben
cuantificarse “reducidas” al eje motor
La siguiente es una clasificación que responde aproximadamente a la mayoría de las situaciones que
se presentan.
Tipo 1: Cupla resistente continuamente (no linealmente) creciente con la velocidad. Ej: Caso de una
bomba centrifuga que de acuerdo con sus principios teóricos debería ser una curva de 2do grado
aunque en la practica responde a una curva de exponente 1 < exp < 2.
Tipo 2: Carga cuasiconstante para toda velocidad, aunque siempre presentan una sobrecarga en el
arranque para proveer la energía necesaria para vencer la inercia de los componentes. Ej. Cintas
transportadoras o puentes grúa.
Tipo 3: Cargas en que la resistencia baja al aumentar la velocidad Ej: Maquinas enrrolladoras de
laminación, maquinas de muy alta inercia, vehículos.
Tipo 4: Cargas variables a velocidad cuasi constante (a velocidad de régimen). Ej. Maquinas
herramientas, generadores eléctricos, compresores a émbolos.
Mt
w
Aunque en el útil el movimiento no sea de rotación la característica es de cupla-velocidad angular
porque se la evalúa “reducida” al eje motor, es decir calculando las transformaciones cinemáticas, las
relaciones de transmisión y las inercias de todos los componentes (cada uno a su velocidad) (no los
rendimientos)
ANALISIS DEL TRANSITORIO DE ARRANQUE
Se analiza el caso de una maquina conectada directamente al motor sin ningún dispositivo de
acoplamiento progresivo o de regulación del motor.
Durante el transitorio de arranque el grupo motor-maquina varia su velocidad de cero (parado) hasta la
velocidad de operación que se establece cuando la cupla motriz (Mm) y resistente (Ml) se igualan.
Durante el transitorio de arranque el motor debe proveer una cupla motriz (Mm) suficiente para vencer
la cupla resistente (Ml) y una cupla de aceleración adicional (Mb) utilizada en acelerar el grupo motor-
67-12 MECANISMOS “B” - UNIDAD I
Hoja 16 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
maquina hasta la velocidad de operación venciendo las inercias de las masas del motor y los
componentes. En este ultimo sentido se trata de aportar a cada componente de la maquina energía
cinética hasta que alcance la correspondiente a su estado de operación en equilibrio dinámico e
implica que durante todo el transitorio la cupla motriz deberá superar a la resistente.
Expresado por la 2da. Ley de Newton aplicada al movimiento de rotación para cada uno de los
instantes del transitorio
Mm = Ml + J * dw/dt = Ml + Mb
reagrupando
∆M = Mm – Ml = J * dw/dt = Mb
operando
∆M * dθ = J * dw * dθ/dt = J * w * dw
(1)
Llamando o al estado “parado” y n al estado de equilibrio de funcionamiento e integrando (suponiendo
para simplificar ∆M constante)
∆M * (θn – θo) = ½ J * (wn2 – wo2) = ∆Ec
Inicialmente “parado”
θo = 0 y ½ J * wo2 = 0
(2)
y
en la que J (momento de inercia de todos los
½ J * wn2 = Ecn
componentes del grupo motor maquina) se expresa “reducido” al eje de entrada.
Ecn = Energía Cinética de los componentes de la maquina en funcionamiento en equilibrio (estado n)
En la grafica adjunta w se expresa por n (frecuencia en
r.p.m.)
La magnitud de la diferencia entre cupla motriz y cupla
resistente (Mb) debe ajustarse durante el transitorio en
función de la rapidez necesaria del arranque y de la
capacidad para transmitir el total de la cupla motora que
tenga resistencialmente cada uno de los componentes de
la maquina.
La observación de la grafica anterior y de las ecuaciones
(1) y (2) muestran que cada diferencial de área bajo la
curva característica motora o resistente (producto de la
ordenada a una n determinada por un ∆n mínimo en el entorno) representan el diferencial de la
energía aportada por el motor y el diferencial de energía consumido en trabajo útil venciendo la
resistencia respectivamente durante el tiempo en que la frecuencia aumenta ese ∆n. El diferencial de
área entre las dos curvas representa el diferencial de energía aplicado a acelerar la maquina.
El área total bajo la curva motora o resistente hasta alcanzar nn representan la energía total aportada
por el motor o la absorbida por el útil respectivamente durante todo el tiempo que dura el arranque y el
área entre las dos curvas representa la energía cinética aportada a todos los componentes del grupo
motor-maquina hasta alcanzar la velocidad en que se igualan las cupla resistente y motora, es el punto
de funcionamiento de la maquina en equilibrio dinámico.
Para los motores eléctricos en general es importante limitar la duración del
67-12 MECANISMOS “B” - UNIDAD I
Hoja 17 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
a)
La corriente durante el arranque es mucho mayor que la de funcionamiento en equilibrio
generando perdidas en forma de calor mayores a las de equilibrio.
b)
El motor funciona a baja velocidad por lo que la ventilación simple generada por su propio
giro es poco efectiva y fundamentalmente su capacidad de conducción y convección de
tiempo calor es menor que el calor generado.
c)
De a) y b) resulta que la temperatura del motor (y en particular del barniz aislante de los
bobinados) aumenta durante el arranque.
d) Una vez alcanzado el equilibrio la corriente es menor y la ventilación es suficiente para
evacuar el calor generado.
Si el tiempo de arranque es demasiado largo los barnices de los bobinados no soportan el aumento
de temperatura, se funden o calcinan perdiendo su condicion de aislantes y generan cortocircuitos que
a su vez aumentan la corriente circulante y destruyen el motor (motor “quemado”). La degradación del
material aislante no necesariamente se completa en un ciclo de arranque sino que puede presentarse
en forma de un acortamiento de la vida del motor.
El tiempo total de arranque depende de la cupla acelerante Mb disponible durante el transitorio y en
casos de cargas pesadas o altas inercias Mb puede resultar menor del necesario.
El sobredimensionamiento del motor si bien aportan mayores Mm y Mb que permite el acortamiento
del tiempo de arranque, determina un estado de equilibrio dinámico en que el motor opera con una
cupla motriz menor que su cupla nominal (recordar definición de cupla nominal). En estas condiciones
el motor trabaja con menor rendimiento eléctrico y mecánico y su “tamaño” implica una mayor
inversión en el armado de la maquina.
Una alternativa, exclusivamente mecánica, para esta situación (sin sobredimensionar ni regular el
motor eléctrico) es utilizar un acople que desconecte el motor de toda o parte de la maquina.
Evitando la resistencia del útil y la inercia de grandes masas desde el comienzo hasta llegar a una
velocidad de equilibrio (wv) próxima a la real de operación (wn) venciendo solo resistencias internas
menores (implica mayor cupla Mb de aceleración durante todo el tiempo) se obtiene un tiempo parcial
corto hasta el punto v, este es el llamado arranque en vacío.
Luego se acopla el resto de la maquina operadora que llega al equilibrio dinámico de operación (n) con
una pequeña variación de velocidad (wn ≈ wv) en otro tiempo corto. Se aprovecha aquí que en la rama
útil de la característica mecánica del motor asincrónico trifásico (rama autoequilibrante) hay gran
variación de cupla con bajas variaciones de velocidad.
La suma de estos dos tiempos parciales es menor que el tiempo de arranque “a plena carga”.
Se logra así un punto de operación con cupla Mn nominal del motor (aprox en la realidad) sin
necesidad de la alta cupla de arranque provista por un motor más grande o de otro Tipo NEMA
(siempre más costosos)
Una comparación de las evoluciones sobre una grafica
de las características mecánicas se ve en la figura.
La diferencia de ordenadas entre la “curva de la
maquina útil bajo carga” y la “curva de arranque en
vacío” para cada valor de w, representa el valor en
que aumenta la cupla acelerante Mb acortando el
tiempo de arranque en el caso de arranque “en vacío”
67-12 MECANISMOS “B” - UNIDAD I
Hoja 18 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
CHAVETAS :
La transmisión de potencia por rotación implica como componente elemental al árbol de transmisión
(ejes en lenguaje coloquial) en los que se montan los elementos de maquina encargado de la
transmisión y modificación de características cinemáticas (poleas de fricción o de correas, piñones de
cadenas, engranajes).
Hay un grupo de componentes que tienen por función asegurar que esos elementos de maquina estén
fijos respecto de los ejes, evitando fundamentalmente las rotaciones relativas y transmitiendo
momento torsor del eje al “cubo” del elemento de máquina.
Estos son las chavetas, los pasadores o espinas y los estriados de ejes.
Todos operan por interferencia de su cuerpo con el del eje y el del cubo impidiendo movimientos de
rotación relativos.
Corte aplicación de pasador - Pasador elástico (espina) - Extremo estriado de árbol palier automotriz
Se estudia en detalle el caso de chavetas y chaveteros por ser el de uso mas extendido en la
construcción de maquinas, que abarca un amplio rango de magnitud de pares de torsión en relación a
la sencillez de su maquinado.
Las dimensiones A, B, C, F, E y G están normalizadas
(DIN 6885 y otras) así como sus tolerancias dimensionales
en función del diámetro D del árbol.
La observación de la norma verifica que siempre es
(G – F) > B con lo que se evitan tensiones normales de
compresión radial. Esto es particularmente importante en
“cubos de fundición”, que no es tenaz; para evitar fracturas
por grietas iniciadas en el chavetero por compresión.
------------------------------------
67-12 MECANISMOS “B” - UNIDAD I
Hoja 19 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
La fuerza F, que multiplicada por el radio D/2 del eje genera (con suficiente exactitud a los fines del
calculo) el Mt a transmitir, es en realidad una fuerza distribuida entre las superficies en contacto del
chavetero en el eje con la chaveta y de la chaveta con el chavetero en el cubo.
Las chavetas se verifican para dos esfuerzos uno de corte y otro de compresión.
Asumiendo que la chaveta esta perfectamente inmovilizada respecto del eje y del cubo y como
consecuencia que el momento torsor se transmite únicamente mediante esfuerzo de corte en un plano
(punteado en el esquema de la derecha) cuyo corte es la cuerda del arco eliminado por el tallado del
chavetero. A los fines del cálculo se aproxima al plano tangencial al eje.
La superficie resistente al corte en este plano tiene un área igual al producto del ancho A de la chaveta
por su longitud L.
F = Sy * A * L
Mt = Sy * A * L * D/2
(a)
En las que Sy es el límite elástico de tensión tangencial del material de menor resistencia entre los de
la chaveta, el cubo y el eje (salvo coeficiente de seguridad). En general se procura que el material de
la chaveta sea el mas dúctil y debil del grupo para que la chaveta sea el elemento de sacrificio de las
tres piezas.
Definidos los materiales, distintos valores de Mt se transmiten únicamente variando la longitud L de la
chaveta, dado que A esta normalizado para el diámetro D del eje. En caso de necesitarse una longitud
mayor que la longitud axial disponible en el eje o el cubo, se disponen dos chavetas a 90° entre si de
acuerdo con buenas “reglas del arte” de proyecto.
De (a) se calcula
L = 2 * Mt / (Sy * A * D)
(b)
Se debe verificar, además, que las tensiones normales de compresión que intercambian las superficies
de la chaveta y el chavetero no superan la tensión limite a la compresión Sc del material más débil de
los tres presentes. La superficie de contacto tiene un área L * B/2
F = Sc * B/2 * L
Mt = Sc * B/2 * L * D/2
(c)
También en este caso una vez elegidos los materiales la única variable es la longitud L .
De (c) se calcula
L = 4 * Mt / (Sc * B * D)
(d)
Generalmente la determinante es la tensión por corte, pero eventualmente puede resultar
determinante la compresión. Por esta razón corresponde calcular L separadamente mediante (b) y (d)
y adoptar el mayor de los dos.
ACOPLES – EMBRAGUES Y FRENOS:
Planteada la transmisión de potencia por rotación de ejes, son necesarios en las maquinas
componentes cuya función sea conectar ejes coaxiales para que giren a igual velocidad.
Cuando la conexión es permanente estos componentes son acoples.
Cuando la conexión es temporaria y se interrumpe en la operación los componentes son embragues.
67-12 MECANISMOS “B” - UNIDAD I
Hoja 20 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
En el caso de los frenos se trata de igualar la velocidad de un eje con la de la bancada (detener el
movimiento) y no de conectar dos ejes en movimiento. No obstante se estudian junto con los
embragues porque comparten principios de funcionamiento y soluciones de proyecto.
ACOPLES: Sin mencionar casos especiales (Acoples fusibles de seguridad, acoples para sentido de
rotación único, etc) pueden diferenciarse genéricamente los siguientes grupos.
RIGIDOS: Son los de menor dificultad de fabricación. Requieren absoluta exactitud de montaje porque
no admiten desalineamiento o desvío angular de los ejes, además transmiten sin amortiguamiento la
torsión en los transitorios.
SEMIRIGIDOS: Permiten cierto grado de desalineamiento y desvío angular.
En el caso del acople de perno y buje aportan una amortiguación en el instante de arranque en base a
la elasticidad de los bujes.
Los dentados son los que mayor cupla de arranque soportan por efecto de engrane a igualdad de
otros parámetros. Tienen un amplio campo de tamaños de aplicación cambiando los materiales de las
partes que lo componen.
Acople de Perno y buje
Acople dentado
FLEXIBLES: Transmiten la torsión mediante un componente elástico no metálico. Son los que proveen
mayor capacidad de desvío y desalinamiento y de amortiguación de torsión. Tienen una capacidad de
transmisión de torsión menor a los tipos anteriores a igualdad de tamaño.
67-12 MECANISMOS “B” - UNIDAD I
Hoja 21 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
EMBRAGUES Y FRENOS:
Los embragues y frenos mecánicos funcionan en base al mismo principio, la fricción.
Un embrague es un mecanismo que esta montado en dos ejes coaxiales que giran a distinta
velocidad. Dos superficies del embrague, una solidaria a cada eje, entran en contacto con una fuerza
normal a ellas regulable que es la señal externa de accionamiento. La fuerza de fricción entre ambas
superficies hace que, luego de un intervalo de tiempo, las dos superficies igualen sus velocidades de
giro y con ellas los ejes.
El material de estas superficies esta especialmente diseñado con alto coeficiente de fricción para
poder transmitir momentos torsores con fuerzas normales a las superficies limitadas.
Durante el tiempo que tardan en igualarse las velocidades de rotación el movimiento relativo entre las
superficies en contacto genera energía en forma de calor por fricción, que debe disiparse para
establecer un equilibrio térmico (temperatura en los componentes que no supere limites por sobre los
que se produce la degradación del material de las superficies en contacto o problemas de dilatación de
componentes).
El freno se estudia como un caso particular de embrague en que uno de los ejes esta detenido, de
modo tal que la velocidad se iguala con la detención de ambos ejes o al desacoplar el freno una vez
alcanzada la reducción de velocidad necesaria en el eje móvil.
Existen en el proyecto de frenos o embragues dos aspectos diferentes que deben encararse
conceptualmente en forma independientemente y coordinarse en el diseño final del freno o embrague.
1ro Cálculo de las fuerzas de accionamiento y de las áreas de superficies de contacto necesarias para
transmitir el momento torsor requerido. En este aspecto se remite a los alumnos al Apunte Frenos y
Embragues publicado entre los apuntes de esta cátedra por el Ing. Omar Mayer.
2do Cálculo de las áreas de superficies de contacto, de las superficies libres de contacto y de la
frecuencia de operación para lograr la evacuación del calor generado por la energía de fricción durante
la conexión en estado de equilibrio térmico. A este aspecto se dedican las siguientes consideraciones:
Las fuerzas de accionamiento F generan
cuplas de frenado por fricción Mf y se puede
aplicar a cada uno de los ejes que se acoplan
el principio de Newton
Mf = - I1 * α1 y Mf = I2 * α2
En que I representa los momentos de inercia, α
las aceleraciones (deceleraciones) que sufre cada eje al acoplarse y el signo indica el sentido opuesto
de las aceleraciones.
De las anteriores resulta
w1t = - (Mf / I1) * t + w1
w1t es la velocidad en el tiempo t durante el intervalo de frenado y w1 es la velocidad angular en el
instante en que comienza el acople t = 0 para el eje 1
y
w2t = (Mf / I2) *t + w2
w2t es la velocidad en el tiempo t durante el intervalo de frenado y w2 es la velocidad angular en el
instante en que comienza el acople t = 0 para el eje 2
La velocidad relativa entre ambos ejes en el instante t es
w1t – w2t = - (Mf / I1) * t + w1 – [(Mf / I2) * t + w2] = w1 – w2 – Mf * [(I1+ I2) / (I1* I2)] * t
67-12 MECANISOS “B” - UNIDAD I
Hoja 22 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
Cuando se completa el acople los dos ejes giran a igual velocidad y resulta
y de la anterior resulta el tiempo ta de acople
w1t – w2t = 0,
ta = [I1* I2 * (w1 – w2)] / [ Mf *(I1+ I2)] (1)
Asumiendo que la fuerza de accionamiento F se aplica en forma instantánea la cupla frenante Mf es
constante durante el intervalo de tiempo de acoplamiento y en cada diferencial de tiempo de este
intervalo se genera (disipa) un incremento de energía ∆E
∆E = Mf * (w1t – w2t) =
Mf * {w1 – w2 – Mf * [(I1+ I2) / (I1* I2)] * t}
La energia disipada durante el intervalo completo se expresa
ta
ta
E = ∫ ∆E*dt = Mf * ∫ {w1 – w2 – Mf * [(I1+ I2) / (I1* I2)] * t} *dt =
0
0
Resolviendo la integral y sustituyendo la por la (1) resulta
E = I1* I2 * (w12 – w22) / [2 * (I1+ I2)]
En el caso genérico de un freno en que la velocidad final es distinta de cero la masa 2 esta detenida o
gira a la velocidad final w2, α2 = 0, I2 no influye en el proceso y con una deducción similar a la anterior
resulta
E = I1* (w12 – w22) / 2
La energía se disipa en calor absorbido por los componentes del embrague (o de un freno), con un
aumento en su temperatura y por transmisión de ese calor al ambiente por convección y radiación en
las superficies expuestas de esos componentes. Mediante el coeficiente del equivalente mecánico del
calor se puede expresar E en términos (unidades) de calor Q.
Suponiendo que el tiempo de acople es muy corto (hipótesis razonable) se asume que la absorción de
la energía generada por fricción se produce sin disipación al ambiente, en tanto que esa disipación por
convección y radiación al ambiente se produce en el tiempo que media entre dos accionamientos
(acople – desacople o la inversa). El aumento de temperatura ∆T (*) determina la temperatura al final
de cada acopamiento, en tanto que el enfriamiento (la temperatura mínima a que quedan los
componentes del embrague entre dos accionamientos) depende (entre otros factores cuasiconstantes)
del tiempo de enfriamiento y consecuentemente de la frecuencia de operación del embrague.
Análisis del enfriamiento aplicando el modelo de Newton
[(T – Tamb) / (T1 – Tamb)] = e-β*t
67-12 MECANISMOS “B” - UNIDAD I
Hoja 23 de 23
Definiciones Iniciales – Características Externas - Rendimiento – Factor de Servicio
En la que T es la temperatura en el instante t
Tamb, temperatura del ambiente
T1 temperatura al comenzar el enfriamiento
β = (hCR * A) / (W * CP)
hCR = coeficiente global convección-radiación = (hR + hC * fv)
hR = coeficiente de radiación (*)
hC = coeficiente de convección (*)
fv = factor de ventilación en caso de ventilación forzada
A = área de superficie expuesta
W = masa del cuerpo que se enfría
CP= capacidad térmica del material
Las magnitudes A, W y Cp dependen del diseño particular del freno y se verifica (*) que hC y hR varían
aumentando con las temperaturas de comienzo y fin de una operación de acople o desacople.
En la siguiente grafica se observa el fenómeno de variación de la temperatura máxima por repetición
del accionamiento, las temperaturas finales de cada accionamiento dependen del enfriamiento que se
produzca en el tiempo entre el y el anterior. La repetición del accionamiento con intervalos que no
permiten enfriamiento a temperatura ambiente genera un aumento de las temperaturas finales que
tiende a amortiguarse por el efecto indicado (*) ya que el aumento de hC y hR con T tienden a reducir el
valor de ∆T llegándose finalmente a un estado de equilibrio térmico en el cual la temperatura varia
entre valores máximos y mínimos constantes.
Resulta entonces que la máxima temperatura soportable y la frecuencia de operación son dos
variables relacionadas.
La temperatura soportable es función del material de fricción (critico) y depende exclusivamente de las
decisiones del proyectista alcanzar equilibrio térmico sin llegar a eses límite para una dada frecuencia
de operación.
La frecuencia de operación que conduce a un estado de equilibrio es distinta según sea la cupla
frenante ( o a transmitir por el embrague) necesaria y por lo tanto debe ser tenida en cuenta por el
ingeniero a cargo de la selección de un embrague (freno) estandar en base a especificaciones
normalizadas.
Dicho de otra manera cuplas frenantes necesarias bajas permitirán altas frecuencias y cuplas mayores
permitirán menores frecuencias en el mismo embrague (freno) para cumplir el objetivo de no superar la
temperatura máxima admisible.
---------------------------------------------------------------------Referencias bibliográficas y agradecimientos:
Norton, Robert L. – Diseño de Maquinaria, 4ta. Eed.- Mc Graw-Hill – 2009 – Mexico DF.
Mayer, Omar E. – Cunia y Accionamiento de Maquinas Utiles – Teórico – Apuntes Cátedra
Mecanismos B – FIUBA – 2010 – Buenos Aires.
Millan Gomez, Simon – Procedimientos de Mecanizado – Paraninfo – 2006 – Madrid.
(a)Niemann, G. – Tratado Teórico Practico de Elementos de Maquinas – Labor S.S. – 1973 – Madrid
Roldan Viloria, Jose - P. de Mecánica Industrial Aplicada – Thomson-Paraninfo - 2002 - Madrid
Siemens – Motores Eléctricos – Answers for industry – Catálogo – 2010
Páginas web
www.vicinaycemvisa.com
www.abusgruas.es
fundamentosdemaquinaswmn.blogstop.com
es.wikipedia.com
WWW.mecapedia.uji.es
Otras tecnicocomerciales.
------------------------------------------------------------------------------------------------