GRUPO 1. NOMBRE:
DNI o Nº de matricula:
ESCUELA SUPERIOR DE INGENIEROS
Ingenieros de Telecomunicación
TEORÍA DEL CONTROL AUTOMÁTICO
Primera parte del Examen de Septiembre. Grupo 1 (15/9/05)
Tiempo: 1 hora y 15 minutos. Este enunciado consta de 2 folios. Comentarios generales: Es necesario incluir
un resumen de los cálculos y breves explicaciones. Utilice al menos dos cifras decimales. Conteste sobre el
propio enunciado; además puede añadir dos folios adicionales si es preciso.
−δπ
SO = M p = e
1−δ
ts =
2
π − arcos(δ )
ωn 1− δ 2
Mr =
1
2δ 1 − δ 2
tp =
π
ωn 1− δ
2
ω r = ω n 1 − 2δ 2
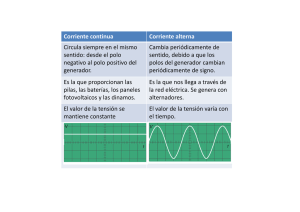
Cuestión 1 (valor: 15% del examen) Se pide identificar la función de transferencia del sistema G1 ( s) , del que se
sabe que es de segundo orden, sin ceros con polos reales e inestable. Para ello se hace funcionar en bucle cerrado
con realimentación no unitaria, de manera que e =r − K r y (ver figura 1) y se obtiene la gráfica 1 como respuesta
ante escalón unitario. A continuación se añade una ganancia de 0.5 en la cadena directa (figura 2) y se obtiene la
gráfica 2 como respuesta ante escalón unitario. Calcule con estos datos G1 ( s) y la ganancia K r .
r
+
−
e
y
G1 ( s )
4
3.9
3.8
3.7
3.6
3.5
3.4
3.3
3.2
3.1
3
2.9
2.8
2.7
2.6
2.5
2.4
2.3
2.2
2.1
2
1.9
1.8
1.7
1.6
1.5
1.4
1.3
1.2
1.1
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Kr
Figura 1
r
+
−
e
G1 ( s )
0 .5
y
Kr
Figura 2
Grafica 2 (y(t))
Grafica 1 (y(t))
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9
2
2.1 2.2 2.3 2.4 2.5
K
, donde a o b son reales y al menos uno de
( s + a )( s + b)
ellos negativo. En bucle cerrado se obtienen G r1 ( s ) y G r 2 ( s ) para las figuras 1 y 2, respectivamente:
K 1ω n1
K
,
G r1 ( s ) = 2
= 2
2
s + 2δ 1ω n1 s + ω n1 s + ( s + a ) s + ab + KK r
K 2ω n 2
0 .5 K
= 2
Gr 2 (s) = 2
2
s + 2δ 2ω n 2 s + ω n 2 s + ( s + a) s + ab + 0.5 KK r
La función de transferencia del sistema será G1 ( s ) =
Pueden identificarse G r1 ( s ) y G r 2 ( s ) a partir de las gráficas:
K1 =
y rp1
rrp1
= 2.5 ; M p1 =
t p 1 = 0.37 =
y p1 − y rp1
y rp1
π
ω n1 1 − δ
2
1
3.4 − 2.5
=
= 0.36 = e
2 .5
⇒ ω n1 =
π
0.37 1 − 0.312
−δ 1π
1−δ 12
⇒ δ1 =
ln( M 1 p ) 2
ln( M 1 p ) 2 + π 2
= 0.31
= 8.93 rad / s
Para G r 2 ( s ) se utilizan las mismas expresiones:
y rp 2
y p 2 − y rp 2 3.87 − 3.3
= 3.3 ; M p 2 =
=
= 0.17 ⇒ δ 1 = 0.49 ; t p 1 = 0.66 ⇒ ω n1 = 5.46 rad / s
K2 =
3.3
rrp 2
y rp 2
(más espacio en la otra cara)
(sigue en la otra cara)
folio 1/2
Igualando coeficientes para G r1 ( s ) : (1) K 1 =
Con (1) y (3): K 1 =
K
ω n21
K
; (2) 2δ 1ω n1 = a + b ; (3) ω n21 = ab + KK r
ab + KK r
⇒ K = 2.5 * 8.93 2 = 199.35 . Para los otros tres parámetros falta una ecuación que puede
obtenerse igualando coeficientes para G r1 ( s ) : (4) ω n22 = ab + 0.5KK r . Restando (4) de (3) se obtiene K r :
0.5 KK r = ω n21 − ω n22 = 8.93 2 − 5.54 2 ⇒ K r = 0.5
Con (2) y (3): a + b = 2δ 1ω n1 = 5.54 ⇒ a (5.54 − a ) + 99.67 = 79.74 ⇒ a 2 − 5.54a − 20.26 = 0
Con esta ecuación se obtienen dos soluciones posibles: a = 8, b = −2.51 y a = −2.46, b = 8.05 . En realidad
son la misma, salvo errores de estimación en gráficas y redondeo mas el intercambio de a y b. Finalmente queda:
G1 ( s ) =
199.35
; K r = 0.5
( s + 8)( s − 2.51)
(las gráficas se generaron en MATLAB con K=200, a=-2.5, b=8 y K r = 0.5 )
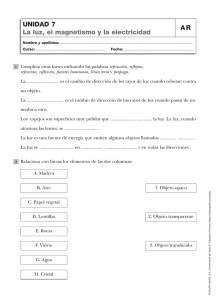
Cuestión 2 (valor: 15% del examen) Dado el siguiente diagrama de Bode (frecuencia en rad/s),
40
35
30
25
20
15
10
5
0
-5
-10
-15
-20
-25
-30
-35
-40
-45
-50
-55
-60
-65
-70
-75
-80
-85
-90
-95
-100
-1
10
0
-20
-40
-60
-80
-100
-120
-140
-160
-180
-200
-220
-240
-260
-280
-300
-320
-340
-360
-380
0
10
1
10
2
10
3
10
4
10
-400
-1
10
0
10
1
10
2
10
3
10
4
10
a) (6 puntos) Identifique la función de transferencia en s del sistema.
•
La asíntota de baja frecuencia tiene pendiente nula, luego el sistema es de tipo 0. Si se prolonga
hasta ω = 1 rad / s se obtiene K p = 15db ⇒ K p = 1015 / 20 = 5.62 .
•
A partir de ω = 3 rad / s la pendiente de la asíntota cambia de 0 a -40db/decada, por lo que hay dos polos;
como existe pico de resonancia, se trata de dos polos complejos, y es necesario calcular δ .
En ω = 10 rad / s la pendiente cambia a -20 db/dec, luego hay un cero.
En ω = 300 rad / s la pendiente cambia a –40db/dec, luego hay otro polo.
Si el sistema fuese de fase mínima, en alta frecuencia habría un desfase de –270º (exceso de polos 2) pero
no es así. En baja frecuencia el desfase es 0, luego la K p es positiva. En el entorno de ω = 10 rad / s la fase
•
•
•
baja, no sube, luego el cero es de fase no mínima. Los polos son estables, porque la fase baja. En total, -360º
de desfase pueden justificarse con un cero de fase no mínima y tres polos estables (desfase de -90º por cada
uno). En alta frecuencia la fase se estabiliza, luego no hay retardo puro.
• Para calcular δ lo más adecuado es utilizar la altura del pico de resonancia, porque ω r ≈ ω n , y no se puede
medir. Se tiene
1
M r = 15db ⇒
= 1015 / 20 ⇒ 126.34δ 4 − 126.34δ 2 + 1 = 0 ⇒ δ 1, 2 = ±0.995; δ 3, 4 = ±0.089
2
2δ 1 − δ
Como los polos son estables, δ > 0 ; como existe pico de resonancia, δ < 0.707 , y por tanto δ = δ 4 = 0.089
5.65(1 − s / 10)
5.65(1 − s / 10)
− 1517.4( s − 10)
= 2
=
Finalmente: G ( s ) = 2 2
( s ω + 2δs / ω + 1)(1 + s / 300) ( s 9 + 0.059 s + 1)(1 + s / 300) ( s + 0.534 s + 9)( s + 300)
NOMBRE:
DNI o Nº de matricula:
Primera parte del Examen de Septiembre. Grupo 1 (15/9/05), folio 2
b) (4 puntos) Realice una aproximación de la función de transferencia despreciando la dinámica no dominante
según los criterios explicados en clase.
Según el criterio explicado en clase, un polo o un cero podrá despreciarse frente a los demás si se
encuentra mucho más alejado del eje imaginario que el resto; la regla práctica fija un límite de 10 veces
la parte real. Comparando un polo real frente a polos complejos sería p > 10 δω n . En el sistema de a) esto
se cumple claramente para el polo situado en -300. El caso del cero es más discutible, porque es de fase no
mínima; se cumple sin embargo que 10 < 10 δω n = 2.67, y en principio podría despreciarse. Se ha considerado
válido despreciar sólo el polo real o bien tanto el polo real como el cero, siempre que se explique la razón. En
cualquier caso hay que mantener la ganancia estática.
Despreciando el polo:
G ( s) ≈
5.65(1 − s / 10)
− 5.085( s − 10)
=
( s 9 + 0.059s + 1) ( s + 0.534s + 9)
2
Despreciando el cero y el polo:
G ( s) ≈
5.65
50.85
=
( s 9 + 0.059s + 1) ( s + 0.534s + 9)
2
Cuestión 3 (valor: 20% del examen). El sistema A está formado por un bloque lineal (un integrador) y otro no
lineal B, que sigue la ecuación diferencial que se muestra en la figura (izquierda) y se pretende utilizar en bucle
cerrado con un controlador (derecha).
A
u
1
s
v
B
dy
= −10 y + 2v 2
dt
y
r
+
−
Gc
u
A
y
a) (4 puntos) Obtenga la función de transferencia en s de una aproximación lineal de A para pequeñas
perturbaciones de v e y en torno a un punto de trabajo genérico, definido por v = v 0 e y = y 0 , con
5 y 0 = v 02 .
v e y se escriben de la forma u = u 0 + y ′ , v = v 0 + v ′ , donde y ′ e v ′ son pequeñas perturbaciones en torno al
punto de trabajo. Así
dy dy ′
∂f
∂f
=
= −10 y + 2v 2 = f (v, y ) = f (v0 , y 0 ) +
(v − u 0 ) +
( y − y 0 ) + ε (v, y )
dt
dt
∂u u0 , y0
∂y u0 , y0
Utilizando una aproximación de primer orden:
dy dy ′
∂f
∂f
v′ +
y ′ = −10 y 0 + 2v02 + 4v 0 v ′ − 10 y ′ = −10 y ′ + 4v 0 v ′ (porque 5 y 0 = v 02 )
=
≅ f (v 0 , y 0 ) +
dt
dt
∂y v0 , y0
∂v v0 , y0
Utilizando transformada de Laplace bajo condiciones iniciales nulas se obtiene la función de transferencia:
4v0
4v 0
sy ′( s ) = −10 y ′( s ) + 4v 0 v ′( s ) ⇒ B( s ) =
. Por lo tanto A( s) =
.
s + 10
s( s + 10)
(sigue en la otra cara)
folio 2/2
b) (6 puntos) Para un punto de trabajo v 0 = 10 y 0 = 20 , dibuje el lugar de las raíces de A calculando
asíntotas y puntos de separación. Utilícelo para calcular un controlador proporcional que
consiga polos complejos en bucle cerrado con δ = 0.5 .
Para v 0 = 10 y 0 = 20 , A( s ) =
40
.
s( s + 10)
1) Asíntotas: Hay dos asíntotas (tantas como el exceso de polos).
180 0 + 360 0 l
⇒ γ 0 = 90 0 , γ 1 = −90 0
Ángulos (K>0): γ l =
np − nc
∑i pi − ∑i ci (0 − 10)
=
= −5
Centroide: σ =
10
np − nc
Para (K<0) γ l =
360 0 l
⇒ γ 0 = 0 0 , γ 1 = 180 0 , y el centroide
np − nc
es el mismo.
2) Punto de separación: La condición necesaria es
K ( s) =
dK
= 0:
ds
s ( s + 10)
dK ( s) 2s + 10
⇒
=
= 0 ⇒ s = −5 , que está sobre el
40
ds
40
lugar para K>0, luego es punto de separación.
3) Cálculo de G c = K : Para δ = 0.5 , α = a cos(δ ) =60 0 y los polos deseados son
Pd = −δω n ± ω n (1 − δ 2 ) j = − 5 ± 5 3 j . Aplicando la condición de módulo (ver figura):
K=
s ( s + 10)
40
=
s = Pd
m1 m 2 100
=
= 2 .5
40
40
 0
0