Aplicaciones Lásers y Domotización XPI. CFPE
Anuncio

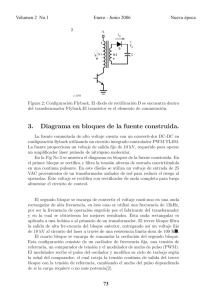
Descripción general del proyecto y las actividades Nº Proyecto. 35 Título del Proyecto. Aplicaciones Laser y Domotización Mediante XPi Centro educativo solicitante. C.F.P.E. Ntra. Sra. de las Mercedes Coordinador/a. Jonathan Medina Temática a la que se acoge. Temática libre Objetivos y justificación: Se han conseguido alcanzar los objetivos planteados en este proyecto, ya que todos los diseños se han diseñado a bajo coste. En primer lugar, se ha diseñado un dispositivo emisor y receptor con el que podemos realizar la escucha de un habitáculo desde el exterior, haciendo uso de las propiedades de reflexión de los cristales por un precio menor de 3€. Este sistema lo pueden utilizar las fuerzas de seguridad o militares para seguridad. Se ha conseguido transmitir información a larga distancia de forma que no sea posible la interceptación de las comunicaciones por terceros, sin necesidad de encriptación de los datos. Este método es muy útil para su uso militar, puesto que haciendo uso de UAVs y unos espejos podemos ir cambiando el camino que toma la luz LASER hasta llegar al receptor, además de usar la gran capacidad que tiene el láser para transmitir información. El diseño del emisor y receptor tiene un coste de 5€. Además se ha utilizado la propiedad del láser para diseñar un receptor capaz de medir las vibraciones de las diferentes maquinarias a través de la reflexión, donde se pueden diagnosticar futuras averías o mal funcionmiento de maquinarias. La principal ventaja es que el coste del receptor es de 3€ y los elementos comerciales tiene un coste de 6000€, además otra ventaja es que sólo se necesita una pegatina reflectante pegada en el dispositivo a medir, por lo que se pueden medir vibraciones en maquinarias pequeñas. Otra ventaja es que en maquinarias pequeñas no se deforman las medidas por el peso de la peguatina. Otros sistemas requieren pegar un acelerómetro en la maquinaria por lo que podrían modificar las medidas. Nuestro sistema al usar un LASER puede ser utilizado en zonas peligrosas de radiacción, zonas químicas y con altas temperaturas, ya que las medidas se toman a través de un cristal. Un problema que presenta el uso del LASER es la necesidad del buen apuntamiento que necesita para su funcionamiento, pero este problema lo hemos solucionados al aumentar la superficie de recepción del fototransistor, para ello se ha incorporado una cúpula de plástico por la cual se redirige la luz del LASER y se aumenta la superficie de recepción evitando dicho problema. Otra ventaja de este proyecto es que con un solo receptor es posible realizar las tres apliaciones, sin necesidad de rediseñar el sistema para otros fines. PROYECTO Introducción. Desde la invención del láser se ha explotado mucho su uso militar incluso muchas veces en proyectos en laboratorios secretos. Una de las aplicaciones más simples y conocidas es el posicionador de blanco por láser. Es posible modular el haz láser para incluir información. La luz de un láser puede viajar largas distancias por el espacio exterior con una pequeña reducción de la intensidad de la señal. Debido a su alta frecuencia, la luz láser puede transportar, por ejemplo, 1.000 veces más canales de televisión de lo que transportan las microondas. Por ello, los láseres resultan ideales para las comunicaciones espaciales. Se han desarrollado fibras ópticas de baja pérdida que transmiten luz láser para la comunicación terrestre, en sistemas telefónicos y redes de ordenadores. También se han empleado técnicas láser para registrar información con una densidad muy alta. Por ejemplo, la luz láser simplifica el registro de un holograma, a partir del cual puede reconstruirse una imagen tridimensional mediante un rayo láser. La primera vez que se logró la transferencia de datos vía láser a larga distancia fue en las islas Canarias, durante el año 2009, realizado por un equipo de OerlikonSpace y la conexión vía láser tuvo una distancia de 1,5 millones de kilómetros. El experimento realizado por los ingenieros consistió en poner en marcha un láser que enlazaba entre las islas de La Palma y Tenerife. La unidad de transmisión fue modificada de tal forma que las condiciones en los 144 kilómetros entre las islas refleja exactamente las que prevalecen en un 1,5 millones de kilómetros de enlace a través del espacio. Esto se logró gracias a la reducción de la emisión de apertura del láser a un diámetro de menos de la mitad de un milímetro, todo esto con el fin de debilitar la señal de la luz. En Alemania, científicos del Instituto Tecnológico de Karlsruhe han logrado enviar un total de 26 terabytes en tan solo un segundo. Definitivamente un nuevo récord en cuanto a la transferencia de datos, ya que 26 terabytes representan 700 DVD’s. A esa impresionante velocidad sería posible transferir la biblioteca más grande del mundo en tan sólo 10 segundos. Objetivos. El presente trabajo tiene por objetivo el estudio, diseño y realización de unos dispositivos que sean capaces de realizar escuchas a través de cristales, que permita realizar transmisiones de datos sin encriptación a larga distancia y de forma que no sea interceptable por terceras personas, usando para ello vehículos aéreos no tripulados (UAVs) con espejos. Estos dispositivos pueden ser usados para la seguridad ciudadana por parte de los cuerpos de seguridad del estado. Además también servirá para realizar un estudio del funcionamiento de las máquinas rotativas con la peculiaridad que será posible usarlo en zonas peligrosas como centrales nucleares o en zonas de alta temperatura, donde las personas no pueden estar. Estos sistemas se realizarán al menor coste, utilizando materiales reciclados y con el menor número posibles de componentes consiguiendo las máximas prestaciones. En todos ellos utilizaremos un puntero LASER gracias a sus características como su direccionalidad, posibilidad de modulación y bajo consumo y coste. Estudio de los sensores y actuadores. En este apartado se realiza un estudio de los sensores y actuadores usados en el trabajo, para ello se realiza en los siguientes apartados una serie de definiciones para ver el correcto funcionamiento del mismo. 1. LASER. Un láser es la emisión estimulada de radiación de las moléculas de gas que contiene, genera o amplifica un haz de luz coherente de determinada intensidad. Se basa en la excitación de una onda estacionaria entre dos espejos, uno opaco y otro traslúcido. Su nombre proviene de Light Amplification by Stimulated Emission of Radiations. El primer láser lo construyó Theodore H. Maiman en Malibú, California. Maiman construyó su láser con una barra de rubí, rodeada de una lámpara de xenón en forma de hélice. Los extremos de la barra de rubí habían sido recubiertos con unas películas reflectoras, a fin de que actuaran como espejos. El láser entonces emitía una descarga muy rápida e intensa de luz roja. Este tipo de láser no era continuo sino pulsado o intermitente. Los LASER los podemos clasificar según su constitución interna en gas, estado sólido, semiconductores y líquidos: LASER de gas: Es el láser más común. Se utiliza un gas que debe ser excitado y para ello se usa una descarga eléctrica o mezcla de gases y los electrones que se mueven en la corriente generada excitan los átomos o moléculas del gas chocándose entre ellos. Los gases usados son gases neutros o ionizados. LASER de estado sólido: Son aquellos donde el medio activo es de estado sólido, como el cromo de una barra de rubí. Los semiconductores también están incluidos, pero la diferencia es que la excitación se realiza por medio de la corriente eléctrica. LASER líquidos: En este caso el medio activo es líquido y se usa un colorante, teniendo la ventaja de que se puede sintonizar para cualquier color desde el infrarojo al ultravioleta y la desventaja de que para excitarse se necesita otro láser. Nuestro láser será un puntero láser rojo que tiene una longitud de onda de 650nm. 2. LDR. Una fotorresistencia LDR “light dependent resistors” es un componente electrónico cuya resistencia disminuye con el aumento de intensidad de luz incidente. Cuando no recibe luz o hay oscuridad su resistencia es alta y cuando reciben luz su resistencia disminuye. Existen dos tipos: intrínsecos y extrínsecos: -Intrínsecos: los electrones disponibles están en la banda de valencia, así que el fotón deberá tener suficiente energía para excitar el electrón a través de la banda prohibida. -Extrínsecos: tienen impurezas agregadas que tienen energía de estado a tierra más cercano a la banda de conducción, adquiriendo una energía inicial. También existen lineales y no lineales: -Lineales: para que actúe como una fotorresistencia lineal (LDR) se cambia de polaridad. -No lineales: no depende de la polaridad. El inconveniente que puede presentar en algunas aplicaciones es que la variación de resistencia no es rápida, por lo que no es conveniente usarlo en aplicaciones con variaciones bruscas de iluminación. 3. Fotodiodo. Un fotodiodo es un semiconductor construido con una unión PN, se polariza inversamente, con lo que se producirá una cierta circulación de corriente eléctrica proporcional a la cantidad de luz que incide en él (luz visible o infrarroja). Los fotodiodos pueden ser: -PN, es una estructura PN sensible a la luz. -PIN, está formada por tres capas y como su nombre indica está formada por una parte P, una parte intrínseca y otra N. -APD (fotodiodo de avalancha), los APD muestran un efecto interno de ganancia de corriente debido a la ionización de impacto cuando se aplica un alto voltaje en inversa.La ganancia de los APD varía con la tensión en inversa aplicada y con la temperatura. 4. Fototransistor. Un fototransistor es un fotodiodo y un transistor bipolar NPN donde la base recibe la radiación de la luz. Cuando la luz incide en la base genera portadores y esta carga produce la conducción. Los fototransistores combinan en un mismo dispositivo la detección de luz y la ganancia. En nuestro caso usaremos el fototransistor BPW40 que presenta la mayor ganancia para la longitud 700nm que corresponde con nuestro láser de 650nm. Método de escucha de bajo coste “LASER-espía”. En este proyecto se expone un método en el cual podremos realizar la escucha del interior de una habitación mediante la vibración del cristal en el cual reflejamos un láser. Se realizará el diseño de un receptor a bajo coste. Este receptor será el encargado de recoger la luz del LASER y de amplificar las vibraciones de luz para poder escuchar las conversaciones. Para experimentar con este tipo de radiación utilizaremos un puntero láser empleado normalmente como indicador en presentaciones, conferencias, etc. La longitud de onda de la luz generada por estos dispositivos es de 660 nanómetros aproximadamente, que corresponde a una frecuencia de 4.500.000 GHz ó 4.500 THz. Esta radiación de frecuencia extremadamente alta puede ser modulada con una señal externa para transmitir información como cualquier otra señal de radio. En nuestro caso lo utilizaremos para transmitir una señal de audio generada por las vibraciones del cristal de la habitación a la que se le realiza la escucha. En los siguientes puntos se describirán los circuitos utilizados. 1. Transmisión: Para generar el haz de luz láser utilizaremos un puntero láser que se puede adquirir fácilmente en los comercios. Este tipo de puntero se alimenta con dos pilas o baterías del tipo AAA, con lo que la tensión de alimentación es de 3V. Pero nosotros lo manipularemos para poder conectarlo a una placa realizada por nosotros. La placa transmisora contará solamente con la alimentación y resistencias necesarias para que el láser no trabaje por encima de sus posibilidades. La tensión de alimentación es de 5V y el laser funciona a 2V. 2. Receptor: Este láser acabará incidiendo en un receptor, es decir, un fototransistor. Anteriormente probamos también utilizando otro tipo de receptor, un LDR, pero éste presentaba un gran inconveniente y es que le influye la luz de los tubos fluorescentes del sitio donde estuviéramos. Este problema ocurre también con el fototransistor, pero con mucha menos intensidad y al cual le hemos encontrado una solución, incorporar un tubo que aísla de la luz ambiente. FOTO DEL EFECTO DE LOS TUBOS FLUORESCENTES 50Hz La señal recogida por el fototransistor es llevada a otra placa en la cual se encuentra un pequeño amplificador realizado con un transistor (2n2222). Este amplificador aumenta la señal y la lleva a un conector jack en el que podemos conectar un altavoz o unos auriculares para que se produzca la escucha del interior de la habitación. Antes de llevarlo al altavoz será necesario filtrar la señal mediante un condensador. En las fotos anteriores se muestran el receptor y el emisor donde se ve como incide el laser en la ventana para reflejarlo hasta el receptor y captar las vibraciones. 3. Prototipo. En la siguiente imágen aparece el esquema que utilizamos para el receptor. El diseño se basó en intentar utilizar el menor número de componentes y que el sistema mantenga buenas prestaciones. Esquema del receptor y PCB El prototipo final del dispositivo receptor es el siguiente: Las imágenes presentan un potenciómetro para el ajuste de la sensibilidad y los condensadores de filtrado, al igual que el transistor para amplificar la señal. Transmisión de datos a larga distancia con aplicación militar. Los sistemas de transmisión de datos vía láser presentan ciertas ventajas en comparación con los otros sistemas utilizados para la transmisión de datos, como el hecho de no necesitar licencias, no congestionar el espectro electromagnético, su inmunidad a interferencias eléctricas y electromagnéticas, su fácil instalación y su alto ancho de banda hacen de esta solución una de las mejores para comunicaciones a corto alcance. A grandes distancias se requiere que el sistema mecánico de apuntamiento sea muy preciso ya que a gran distancia, pequeños ángulos de desviación en el transmisor ocasionan grandes variaciones en la alimentación con el receptor. Pero este problema se puede solucionar ampliando el área del sistema receptor. En nuestro caso se ha ampliado utilizando una cúpula de plástico que recoge el haz del LASER y de esta forma no es necesaria tanta precisión. Se realizará el diseño de un emisor y un receptor que será el encargado de enviar y recibir respectivamente la información rebotando en unos espejos dispuestos en UAVs que pueden variar de forma constante el haz del LASER con la inclinación de los espejos y así la transmisión sería imposible ser interceptada por terceras personas. 1. Transmisión: Utilizaremos el puntero láser explicado anteriormente. La tensión de alimentación es de 3V. Este dispositivo lo incorporaremos a un sistema que modulará la luz del LASER en función de la señal a transmitir (modulación AM). 2. Receptor: De nuevo, usaremos el receptor explicado en el apartado anterior, pero ahora se puede conectar a nuestro PC o altavoz y donde podemos recibir la información enviada por el transmisor. En la foto anterior se muestra el receptor que recibirá las señales enviadas por el transmisor. 3. Prototipo. Los siguientes esquemas corresponden al emisor y receptor del sistema para la transmisión de datos. Placa emisor LASER. Placa receptor LASER Emisor LASER. Receptor LASER. Los cálculos necesarios para obtener los valores de las resistencias serán: ICQ = 20mA VCE,Q = Vcc/ 2 = 2,5V VCC = 5V ß = 293 IB = 68,25 μA RB = R1 x R2 / R1 + R2 VB = Vcc x R1 / R1 + R2 VB – VRE = IB x RB + IE x RE VCE – VCC = - IE x RE – IC x RC R2 VB = VCC x R1 x R2 / R1 + R2 R2 VB = VCC x RB R2 = VCC x RB / VB = 2930Ω R1 = VCC x RB / VCC – VB = 976,67Ω VCE - VCC = - IC x 0,25 x RC – IC x RC VCE - VCC = (- IC x 0,25 – IC ) x RC RC = VCE - VCC / - (IC x 0,25 + IC) = 100Ω RE = 1/ 4 RC = 25Ω RB = ß x RE / 10 = 732,5Ω IB = IC / ß = 68,25 μA VB = RB x IB + RE x IE + VBE = 1,25 VR2 = 4V VRE = 0,45V VCE = 3V VCGND = 3,47V IC = 16,8 mA Vibrómetro de bajo coste. En la industria existe una serie de mantenimiento que se realiza a las máquinas rotativas y pueden ser de tipo preventivo o correctivo, dentro de un mantenimiento preventivo los parámetros vibratorios de las máquinas definen el estado de salud de la misma. Las fuentes más comunes de este fallo en los motores son el desequilibrio, resonancias y el desalineamiento, aunque en posteriores puntos se detalla la norma que rigen las averías. Existen muchos problemas que afectan a la salud de la maquinaria que no tienen nada que ver con estas dolencias y sí con las vibraciones, de ahí que el mantenimiento preventivo sea fundamental para el correcto funcionamiento de las máquinas. El empleo de vibrómetros para saber el estado de salud de la máquina es una técnica muy utilizada en el mundo de la industria. El análisis de vibraciones en este tipo de máquinas conlleva un análisis de la señal para concretar el tipo de fallo en el motor: Análisis espectral. Análisis de forma de onda. Análisis de fase de vibraciones. Análisis de los promedios síncronos en el tiempo. Análisis de demodulaciones. Análisis de vibraciones en partidas y paradas de una máquina. Transformadas tiempo-frecuencia. El sistema diseñado y propuesto en este trabajo realiza un análisis en la forma de onda, ya que de aquí se puede obtener los valores de la señal acorde a la norma ISO que regula dichas vibraciones. El diseño empleado es un trabajo de bajo coste y altas prestaciones. Sistemas de medidas La medición de vibraciones es un parámetro fundamental en máquinas rotativas, cosa que no pasa en una máquina ideal. Sin embargo por las características inherentes de los materiales que constituyen un motor, éstos provocan vibraciones, de esta forma se puede afirmar que todos los motores poseen una serie de vibraciones. Las vibraciones en una maquinaria se encuentran relacionadas de forma muy directa con su vida útil, cuanto menor sea el nivel de vibraciones, es un indicativo del correcto funcionamiento de la misma, por el contrario, un aumento de las vibraciones significa que la máquina posee alguna deficiencia, éste es un indicador de salud de la máquina, es capaz de juzgar las condiciones dinámicas de la misma. Las averías más comunes en las máquinas rotativas debido a las vibraciones son: · Desbalance. · Desalineación. · Excentricidad. · Rodamientos defectuosos. · Holgura mecánica. · Vibraciones producidas en los engranajes. El desequilibrio es uno de los motivos más graves de fallos en máquinas rotativas por la aparición de masas descompensadas en el rotor. Estos desequilibrios pueden provocar problemas de resonancia en la instalación y provocar graves averías en las máquinas. Existen varias técnicas para medir vibraciones, casi todas estas técnicas son de contactos. Uno de los sistemas que no usan métodos de contacto, son los basados en el efecto Doppler, que se define como el cambio en la frecuencia, creado por la vibración de la superficie reflejada y que depende de la frecuencia de vibración. Además otras de las técnicas para la medición de estos fallos se basan en los sistemas inerciales. Comenzando por el primer eslabón de la cadena que es el transductor, debe de medir con exactitud las magnitudes físicas que se desean obtener. Para ello existen cuatro tipos de transductores, definiendo esta etapa como una de las menos económicas: · Sensor de desplazamiento relativo sin contacto. · Sensor de desplazamiento relativo con contacto. · Sensor de velocidad. · Sensor de aceleración. La etapa de acondicionamiento de la señal lo realiza un circuito electrónico diseñado según las necesidades de la etapa anterior. Una vez llegado a la etapa de análisis y medición se debe saber que las vibraciones de las máquinas poseen una serie de parámetros que rigen el funcionamiento de la misma, estos parámetros tales como amplitud y frecuencia vienen determinados por la norma ISO 3945-1985: Severidad de vibración RMS [mm/seg] Tipo de soporte Rígido Flexible 0.46 Buena Buena 2.8 Satisfactoria 4.6 7.1 Satisfactoria No Satisfactoria No Satisfactoria 11.2 18.0 28.0 71.0 Inaceptable Inaceptable Tabla 1: Valores de referencia de amplitud de vibración para analizar la condición de una máquina. FRECUENCIA CAUSAS PROBABLES DE FALLAS 1xRPM Desbalanceo, engranajes o poleas descentradas, desalineamiento o eje flexionado, resonancia, problemas eléctricos, fuerzas alternativas. 2xRPM Huelgos o juegos mecánicos, desalineamiento, fuerzas alternativas, resonancia. 3xRPM Desalineamiento, combinación de huelgos mecánicos axiales excesivos con desalineamiento < a 1x RPM Remolino de aceite (oilwhirl) en cojinetes o rotores Frec. De línea Problemas eléctricos Engranajes dañados, fuerzas aerodinámicas, fuerzas hidráulicas, Armónicas de RPM huelgos o juegos mecánicos, fuerzas alternativas. Alta frecuencia (no Cojinetes antifricción en mal estado armónicas) Tabla 2: Frecuencias de vibración y origen probable de falla. Vibrómetros basados en sistemas inerciales. Los acelerómetros son transductores que pertenecen a los sistemas inerciales. A partir de las medidas inerciales se puede determinar las aceleraciones lineales y de ahí las velocidades angulares. Una vez obtenidas las aceleraciones sólo hay que integrar para obtener la velocidad lineal, la posición y la posición angular. En la Figura 1, se muestra un acelerómetro comercial de dos ejes, cuya finalidad es ser usado en robótica. Figura 1. Acelerómetro de 3 ejes. Vibrómetros basados en el Efecto Doppler Tracking Laser Doppler Vibrometry (TLDV) es una técnica de medida de vibración basadas en el efecto Doppler, se trata de un sistema de medida de velocidad relativa sin contacto, usado en múltiples ocasiones tales como medidas del flujo sanguíneo o medidas de velocidad de partículas en suspensión, o incluso como vibrómetro. El emisor envía una señal que al rebotar en el elemento a medir modifica su frecuencia y el receptor recibe una señal con la frecuencia y amplitud que el motor posee gracias una pequeña pegatina reflectante. 1. Vibrómetros comerciales. Algunos de los vibrómetros comerciales que se pueden encontrar son: 1. Medidor de vibración TYP-63: Este vibrómetro sirve para comprobar máquinas rotativas. Este medidor de vibración mide la aceleración. El precio es de 500€ y mide un rango de frecuencas de hasta 1KHz. 2. Medidor de vibración TYP-VT300: Este vibrómetro comprueba las máquinas rotativas. Realiza las medidas de la aceleración. El precio es de 1100€ y mide un rango de frecuencas de hasta 10KHz. 3. PDV 100: Este vibrómetro realiza las medidas usando un láser, pero tiene un rango limitado de 30m y una frecuencia de 22KHz, teniendo un precio de 6000€. 2. Transmisión: El laser en este caso es el usado anteriormente con una tensión de alimentación de 3V. 3. Receptor: Igual que el en caso anterior, el receptor es el explicado en apartados anteriores.Ahora este amplificador aumenta la señal y la lleva a un conector que podemos conectar a nuestro osciloscopio o analizador de frecuencia y donde podemos recibir las vibraciones recogidas por el LASER. En la foto anterior se ve el receptor y el emisor apuntando con el laser en el motor y se refleja hasta el receptor que captará las vibraciones. La siguiente imagen muestra la captura del oscioscopio que mide las vibraciones. Las vibraciones del motor ascienden a 9KHz, si incorporamos un analizador de frecuencia se consiguen obtener los picos de las vibraciones. Esta imagen está tomada para un motor de industria, comprobando así el buen funcionamiento del sistema en entornos reales. Las siguientes imágenes muestran un experimento realizado en el taller. 4. Prototipo. El prototipo utilizado es el mismo receptor que en los puntos anteriores, comprobando la versatilidad de un mismo dispositivo para usarlo en diferentes aplicaciones. Presupuesto. Según los componentes utilizados para construir los prototipos, el coste del receptor y el emisor ascienden a 1.4€ y 2€ respectivamente. Material Precio Unidades Unitario Precio Total € 1 2 Fototransistor BPW40 0.5 € 1 0.5 € Transistor 2n2222 0.4 € 2 0.8 € Condensadores 0.3 € 4 1.2 € Resistencias 0.1 € 8 0.8 € Láser rojo 2 To tal € 5.3 € Conclusiones. Se han conseguido alcanzar los objetivos planteados en este proyecto, ya que todos los diseños se han diseñado a bajo coste. En primer lugar, se ha diseñado un dispositivo emisor y receptor con el que podemos realizar la escucha de un habitáculo desde el exterior, haciendo uso de las propiedades de reflexión de los cristales por un precio menor de 3€. Este sistema lo pueden utilizar las fuerzas de seguridad o militares para seguridad. Se ha conseguido transmitir información a larga distancia de forma que no sea posible la interceptación de las comunicaciones por terceros, sin necesidad de encriptación de los datos. Este método es muy útil para su uso militar, puesto que haciendo uso de UAVs y unos espejos podemos ir cambiando el camino que toma la luz LASER hasta llegar al receptor, además de usar la gran capacidad que tiene el láser para transmitir información. El diseño del emisor y receptor tiene un coste de 5€. Además se ha utilizado la propiedad del láser para diseñar un receptor capaz de medir las vibraciones de las diferentes maquinarias a través de la reflexión, donde se pueden diagnosticar futuras averías o mal funcionmiento de maquinarias. La principal ventaja es que el coste del receptor es de 3€ y los elementos comerciales tiene un coste de 6000€, además otra ventaja es que sólo se necesita una pegatina reflectante pegada en el dispositivo a medir, por lo que se pueden medir vibraciones en maquinarias pequeñas. Otra ventaja es que en maquinarias pequeñas no se deforman las medidas por el peso de la peguatina. Otros sistemas requieren pegar un acelerómetro en la maquinaria por lo que podrían modificar las medidas. Nuestro sistema al usar un LASER puede ser utilizado en zonas peligrosas de radiacción, zonas químicas y con altas temperaturas, ya que las medidas se toman a través de un cristal. Un problema que presenta el uso del LASER es la necesidad del buen apuntamiento que necesita para su funcionamiento, pero este problema lo hemos solucionados al aumentar la superficie de recepción del fototransistor, para ello se ha incorporado una cúpula de plástico por la cual se redirige la luz del LASER y se aumenta la superficie de recepción evitando dicho problema. Otra ventaja de este proyecto es que con un solo receptor es posible realizar las tres apliaciones, sin necesidad de rediseñar el sistema para otros fines. Bibliografía. 1. 2. 3. 4. 5. 6. 7. 8. http://www.monografias.com/trabajos/laser/laser.shtml http://www.wordreference.com/definicion/l%C3%A1ser http://www.alegsa.com.ar/Dic/laser.php http://www.ojocientifico.com/2011/02/08/como-funciona-un-laser http://www.portalplanetasedna.com.ar/laser.htm http://clpu.es/documentospublicos/OSA%2004_.pdf http://www.um.es/leq/laser/Ch-6/F6s1t2p1.htm http://oftalmonoticias.blogspot.com.es/2013/02/laseres-de-rubi-neodimio-y-ndyag.html 9. http://es.wikipedia.org/wiki/Fotorresistencia 10. http://martinezmorenomedicionesind.blogspot.com.es/2007/06/fotoresisten cia-ldr_16.html 11. http://www.apuntesdeelectronica.com/componentes/ldrfotorresistencias.htm 12. http://platea.pntic.mec.es/~lmarti2/circuitos/celsolar/ldr.htm 13. http://www.neoteo.com/ldr-fotorresistencias/ 14. http://www.unicrom.com/Tut_fotodiodo.asp 15. http://sensorfototransistorofotodiodo.blogspot.com.es/2008/03/el-fotodiodoel-fotodiodo-se-parece.html 16. http://www.slideshare.net/joselin33/fotodiodos 17. http://es.answers.yahoo.com/question/index?qid=20130205185954AAUgG Ur 18. http://es.wikipedia.org/wiki/Fotodiodo_de_avalancha 19. http://es.wikipedia.org/wiki/Diodo_Schottky 20. http://es.wikipedia.org/wiki/Diodo_PIN 21. http://es.wikipedia.org/wiki/Fotodiodo 22. http://es.wikipedia.org/wiki/Fototransistor 23. http://www.itlalaguna.edu.mx/Academico/Carreras/electronica/opteca/OPT OPDF2_archivos/UNIDAD2TEMA4.PDF 24. http://www.ecured.cu/index.php/Fototransistor Relación de actividades Actividad 1. Escuchas Láser Interrogante que plantea. Muestra diversas aplicaciones de bajo coste Descripción de la actividad. Los divulgadores muestran las diversas aplicaciones que se pueden realizar con un láser. Material necesario. 1 Mesas, 5 sillas, y 3 bancos Consideraciones especiales. alimentación eléctrica cercana Duración. 30min Actividad 2. Domotica Interrogante que plantea. Como domotizar una vivienda con bajo coste Descripción de la actividad. El divulgador muestra el funcionamiento de un bus de datos llamado X-10 y la introducción de un pequeño pc como máster del bus Interacción con el visitante. El visitante puede accionar lámparas y otras cuestiones mediante un smartphone. Material necesario.1 mesas Consideraciones especiales. alimentación eléctrica cercana Duración. 30min. Actividad 3. Vibrómetros láser Interrogante que plantea. Sistema de bajo coste Descripción de la actividad. Se muestra el correcto funcionamiento de un diseño de bajo coste Interacción con el visitante. El visitante puede apreciar el correcto funcionamiento frente a dispositivos de mayor coste Material necesario. 1 mesa Consideraciones especiales. ninguna Duración. 30min Actividad 4. Emision de datos láser Interrogante que plantea. Se explica la codificación y decoficación de emisores láseres Descripción de la actividad. El divulgador explica el funcionamiento y realiza muestras del correcto funcionamiento de un dispositivo de bajo coste Interacción con el visitante. El visitante puede apreciar el correcto funcionamiento del diseño. Material necesario.1 mesa Consideraciones especiales. ninguna Duración. 30 min Objetivos y justificación: Con este proyecto hemos conseguido una solución completa de bajo coste, por medio de la que podemos implementar un completo sistema de control domestico (X10) para gestionar el consumo energético y la seguridad tanto en un hogar particular, como en oficinas comerciales, hoteles, etc. Para ello nos hemos basado en un sistema que se pueda aplicar a cualquier estancia, aprovechando la instalación eléctrica estándar, un sevidor PHP alojado en una Raspberry Pi, librerías libres de visión artificial y una App que se ha creado para controlar todo el sistema con un Smartphone. Desde la aplicación para Smartphone, se consigue el control completo de unas series de webcam de distintos fabricantes para detectar movimientos, como sistema de seguridad dentro de un recinto, además se controla un bus X10 por parte de usuario final. Se ha instalado un pequeño servidor “Raspberry PI” basado en software libre unas series de aplicaciones que dan capacidad a viviendas, empresas y hoteles de gestionar la energía consumida en los dispositivos eléctricos, de manera más eficiente. Se ha instalado un servidor PHP que será el encargado de gestionar los comandos enviados por la aplicación móvil y de almacenar el estado en el que se encuentra cada módulo X10. Se ha realizado una maqueta donde se muestra que por la misma línea de la red eléctrica, sin necesidad de realizar una nueva instalación, es posible controlar los diferentes dispositivos. En el caso de las industrias el ahorro económico sería significativo. Se ha realizado una aplicación para SmartPhone, de descarga libre mediante código QR, desde Market de forma gratuita o desde la página web. De esta forma, una oficina u Hotel da la posibilidad a sus empleados y clientes a gestionar el consumo energético y los tipos de seguridad del sistema, añadiendo un valor muy profesional el sistema de seguridad implementado. PROYECTO Introducción. En gran magnitud de bibliografía se define la domótica, como la integración de las nuevas tecnologías y el diseño en los espacios habitables, a fin de obtener un mayor confort, ahorro de energía, y tiempo. A su vez se define la inmotica, como la domotización aplicada a los edificios. La inmótica posee unas áres de aplicaciones muy abiertas, tales como: Seguridad y alarmas. Control de gestión de energía. Áreas de comunicación. Sistemas de confortabilidad. La automatizción en los edificios surge a partir del siglo XIX, junto con las aplicaciones de los autómatas programables. El resto de fabricantes propuestos en las bibliografías utilizan un protocolo específicos, sin realizar la transmisión de datos bajo un cable distinto al de la red.Con este sistema se consigue el control de toda a vivienda sin necesidad de instalar cables en la instalación, tratándose de una ecnología cableada al introducir un sistema empotrado, nos permite controlar a su vez de forma inalámbrica varios protocolos tales como Zigbee, wifi…. En KNX se usa una red independiente al del protocolo de comunicaciones para la alimentación de los dispositivos, de hecho, para el correcto funcionamiento de una instalación se necesitan, actuadores y sensores como en cualquier instalación, pasarelas, como en nuestro caso hemos realizado con a RaspBerry y acopladores, uso que no necesita en nuestro caso, para la instalación de dispositivos que no pertenezcan al mismo protocolo. SimonVit@ es un protocolo de comunicaciones con un bus de datos propio y distinto a la alimentación, como pasara con KNX. En la actualidad SimonVit@ posee software propio. ATHomeal igual que sucede con los dos sistemas anteriores posee un bus de datos propio, lo que obliga a las empresas instaladoras ha reaizar una tirada de cable exrta para a comunicación, a su vez también posee software propio y pantalla táctil extra. En el trabajo realizado, no se han instalado buses de datos, se ha usado software libre, no se requiere la compra de una pantalla táctil para el control o la programación de la vivienda, y lo más importante, los dispositivos se alimentan de la propia red eléctrica, y pueden pertenecer a diversos fabricantes optando así al sistema más económico. El acceso del usuario (actualmente sin alta en base de datos, para controlar y limitar los accesos), se ha realizado a través de una appdiseñada para dispositivos Android que esta disponible para su descarga en el market, siendo un sistema Open Source. Otro importante punto dentro de este trabajo es el ahorro energético que se puede llegar a realizar con instalaciones de este tipo, bien en hoteles, donde los clientes no dejan la calefacción, lamparas o el AA encendido, si no que se les permitiría controlar estos dispositivos desde el movil poco antes de llegar a las habitaciones, lo mismo ocurriría en el caso de edificios de oficinas, donde los empleados puedan dar marcha a los sistemas poco antes de llegar, sin necesidad de que se pueda quedar los dispositivos encendidos por descuido. Por ultimo en el caso del hogar, donde el confort, ahorro energético y seguridad son las principales claves de un sistema domótico. Pues se conseguiría con nuestro dispositivo. Sistema X10. X10 es un protocolo de comunicaciones para el control de dispositivos eléctricos, que utiliza la línea eléctrica (220V o 110V), para transmitir señales de control entre equipos instalados en dicha red. Los dispositivos X10 que se comercializan son solo para uso individual y en entornos domésticos de hasta 250 m2, dada su limitación en ancho de banday en el número máximo de dispositivos a controlar (256). No obstante existen elementos de última generación que incorporan, entre otros, los protocolos X-10 extendidos, para dar funcionalidad a soluciones de comunicación como la bidireccionalidad, solicitud de estados y comprobación de la correcta transmisión de las tramas. X10 fue desarrollada en “1978 por Pico Electronics of Glenrothes”, Escocia, para permitir el control remoto de los dispositivos domésticos. Fue la primera tecnología domótica en aparecer y sigue siendo la más ampliamente disponible, principalmente por su característica de autoinstalable, sin necesidad de cableado adicional. Las señales de control de X10 se basan en la transmisión de pulsos a 120kHz que representan información digital. Estos pulsos se sincronizan en el cruce por cero de la señal de red (50 Hz ó 60 Hz). Con la presencia de un pulso en un semiciclo y la ausencia del mismo en el semiciclo siguiente se representa un '1' lógico y a la inversa se representa un '0'. A su vez, cada orden se transmite 2 veces, con lo cual toda la información transmitida tiene cuádruple redundancia. Cada orden involucra 11 ciclos de red (220 mspara 50 Hz y 183,33, para 60Hz). Fig.1. Transmisión de datos. Primero se transmite una orden con el Código de Casa y el Número de Módulo que direccionan el módulo en cuestión. Luego se transmite otro orden con el código de función a realizar (FunctionCode). Hay 256 direcciones soportadas por el protocolo. En las siguientes líneas se redacta la transmisión. Este pulso de 1 milisegundo debería de hecho ser transmitido tres veces para coincidir con los puntos de cortes cero de las tres fases en un sistema de distribución de tres fases. El código de comienzo (1110) es el único que no se envía de forma complementaria yes el único código que no cumple el salto cada 4 o 5 instrucciones. Inmediatamente después del código de comienzo, se transmite la dirección de la casa o letra según se muestra en la. La tabla donde se muestra las letras es laTabla. 1. Después de enviar el código de la letra enviamos la dirección de unidad o número. En la Tabla. 2hacíamos referencia al código de control, formado por cuatro b una dirección de unidad y uno si queremos mandar una orden de comando. Debido al medio de transmisión utilizado los diseñadores del código X-10 decidieron transmitir dos veces cada uno de estos bloques de información para que el sistema ganara en fiabilidad. Estos 3 ciclos de margen son necesarios para que el receptor mueva los datos de sus registros en cada uno de los seis pasos por cero.Una vez que el receptor ha procesado sus datos de dirección, está listo para recibir una orden de comando. Al igual que se había hecho al enviar la dirección, el bloque de datos del comando debe empezar por el código de comienzo, seguido del código de la letra y el código de control, finalmente irá el sufijo, teniendo que ser en este caso igual a 1 para que el código de control sea interpretado como un comando y no como una dirección por el receptor.Y por último esta imagen reflejaría los ciclos totales para terminar con una transmisión completa. Fig.2. Transmisión completa Con esto hemos definido como códifica el protocolo, en las siguientes tablas se muestran los datos a transmitir: Tabla. 1. Código de la Casa Tabla. 2. Direccionamiento y función. Network X10. La instalación realizada nos permite comunicarnos con la vivienda, edifici, etc.Sólo con la aplicación de un móvil mediante *.php, podemos monitorizar el estado y controlar el sistema.En la siguiente figura se muestra como sería el acceso exterior al control del sistema. Aplicación Android Fig.3. Conexión desde usuario hasta Servidor. Como se puede observar, através de una red podemos acceder al servidor, en él se encuentra instalado un servidor PHP con el que se comunica la aplicación Android, a través del cual podemos escribir las variables, estados y cambios de los dispositivos conectados, este código realiza un muestreo de todas las variables de la instalación cada milisegundo. En la siguiente imagen se puede observar el uso de la red eléctrica para la transmisión de datos. Para controlar los dispositivos X10 necesitamos una interface que adapte la comunicación USB a la red eléctrica. Este dispositivo es el “CM11” que permite una comunicación USB con el PC. Todos los dispositivos que se deseen gobernar deben estar instalados sobre un módulo X10, configurado con su dirección alfanumerica. Fig.4. Instalación del Bus de datos Seguridad. Como sistema de seguridad, se ha implementado un sistema conectado a la RaspBerry Pi, con la finalidad de que la propia PCB, sea quien controle, y gestione la seguridad del edificio o vivienda. Se ha instalado una cámara, ésta cámara no necesita pertenecer a ningún fabricante específico, en nuestro caso se ha utilizado la webcam de una ps3, y mediante una librería se configura para que realice fotos a los movimientos que se produzcan dentro de la vivienda. El sistema se puede ver desde el exterior de la vivienda, mediante la conexión a internet, actuando con un pequeño servidor, el usuario puede acceder a las alarmas y controlar la vivienda desde cualquier parte del mundo, proporcionando así la simulación de presencia como sistema de seguridad. SIM900. Se ha utilizado una tarjeta SIM900 para comunicar con el exterior de la vivienda con las alarmas que se activan en el interior de la misma. SIM900 es un micro-controlador con capacidad de comunicarse mediante GSM/GPRS en las cuatro bandas de 850/900/1800/1900 MHz, integrado por un potente microprocesador de ARM. Fig.1. Imagen del microprocesador SIM900 Incorpora una pila TCP/IP que es controlada mediante comandos AT. en el trabajo, este dispositivo posee la capacidad de llamar, enviar sms o documentación mediante WathsApp. Fig.2. PCB Utilizada en la Instalación. Más concretamente se ha usado ésta PCB, se trata del modelo SIMCOM SIM900 quad-band, posee la posibilidad de utilizar el reloj interno. Las características eléctricas son las más significante ya que sólo consume en reposo 1.5mA, y 250mA cuando realizamos una llamada, el consumo del GPS que es mucho mayor (entorno a 440mA) no ha lugar en esta aplicación. En las siguientes imágenes podemos observar los tipos de encendido que se pueden realizar, tanto pulsando el pulsador que posee la pcb, o desde un micro-procesador externo. Fig.3. PowerUp y ShutDown. En nuestra aplicación se ha usado un micro-controlador externo para comunicarse con el módulo GPRS Shield. En líneas futuras éste micro-procesador externo tenderá a la desaparición. Motion library. Motion es una librería que monitoriza la señal que proviene de una cámara, dicha librería es capaz de detectar una parte significante de la imagen ha cambiado, por lo que se puede decir, que es sensible a captar movimiento entre las imágenes. Como ya se ha comentado anteriormente, para capturar las imágenes se ha utilizado PS3 EyeCam, dicha librería nos permite utilizar cualquier tipo de webcam, incluso no permite montar un array de cámaras y controlar las imágenes. Fig.4. Una de las cámaras usadas en el trabajo, y una imagen en movimiento. La librera Motion se han modificados varias opciones para poder ver desde cualquier navegador lo que sucede dentro de la vivienda, permitiendo así la conexión a la vivienda no solo desde el Smartphone, sino desde un pc. Otra de las opciones programadas en esta librería es la opción de realizar fotos a los objetos que se mueven dentro de su angulo de visión, tras las fotos, se realiza un cuadrado blanco, permitiendo a los usuarios saber si se ha invadido su intimidad. Para finalizar en la programación de esta librería, se le ha incluido la posibilidad de lanzar un programa para activar una llamada telefónica mediante el módulo SIM900 conectado a un arduino, permitiendo al usuario final de la app observar si sucede algo dentro de su vivienda y llamar a los cuerpos de seguridad sin ningún peligro para dichos usuarios. Heyu. Heyu es una aplicación que nos permite comunicarnos con diversos dispositivos bajo el protocolo de comunicaciones X10. Esta aplicación libre http://www.heyu.org/, nos permite comunicar un pc bajo un sistema unix con una pasarela de comunicaciones, en nuestro caso nuestra pasarela es el modulo CM11. Es un software que actua como hilo, uniendio en el servidor bajo *.php, con la red eléctrica. Es fácil de instalar y realiza operaciones bajo líneas de comandos, en las siguientes líneas se observan algunos ejemplos. Comandos de ejemplos “HEYU (función) (direccion)”: Encendido de un modulo con dirección A1: Heyuon a1 Modulodimmer con valor 8 y dirección A1: Heyudimb a1 8 (1-100%, 22- 0%) MySQL. En el servidor que hemos utilizado se ha instalado MySql como base de datos (BD), la finalidad de esta BD es la de servir como hilo de union entre la app que corre en el Smartphone y los software que funcionan de forma fantasma en el servidor. Fig.5. Imgen de la base de datos. Se ha generado una base de datos llamada “domo_db”, en dicha BD se le ha añadido una sola tabla no dinamica, es decir, no posee vida, esta compuesta por una sola fila y 10 columnas. El valor de cada columna es un estado de la vivienda que se representa en la app. RaspBerry PI. Raspberry Pi es un sistema embebidode bajo costo, desarrollado en Reino Unido por la Fundación Raspberry Pi, con el objetivo de estimular la enseñanza de ciencias de la computación en las escuelas. El diseño incluye un System-on-a-chip Broadcom BCM2835, que contiene un procesador central (CPU) ARM1176JZF-S a 700 MHz (el firmware incluye unos modos “Turbo” para que el usuario pueda hacerle overclock de hasta 1 GHz sin perder la garantía), un procesador gráfico (GPU) VideoCore IV, y 512 MiB de memoria RAM (aunque originalmente al ser lanzado eran 256 MiB). El diseño no incluye un disco duro ni unidad de estado sólido, ya que usa una tarjeta SD para el almacenamiento permanente; tampoco incluye fuente de alimentación ni carcasa. El 29 de febrero de 2012 la fundación empezó a aceptar órdenes de compra del modelo B, y el 4 de febrero de 2013 del modelo A. La fundación da soporte para las descargas de las distribuciones para arquitectura ARM, Raspbian (derivada de Debian), RISC OS, Arch Linux ARM (derivado de Arch Linux) y Pidora (derivado de Fedora); y promueve principalmente el aprendizaje dellenguaje de programación Python, y otros lenguajes como Tiny BASIC, C y Perl. La fundación da soporte para las descargas de las distribuciones para arquitectura ARM, Raspbian (derivada de Debian), RISC OS, Arch Linux ARM (derivado de Arch Linux) y Pidora (derivado de Fedora); y promueve principalmente el aprendizaje dellenguaje de programación Python, y otros lenguajes como Tiny BASIC, C y Perl. Fig.5. RaspBerry Pi. En nuestro caso se ha realizado la instalación de Raspbian, php5, apache y Heyu, para la realización de nuestro sistema. En la siguiente figura se muestra un diagrama de flujo del funcionamiento del software en php Fig.6. Diagrama de flujo del programa que corre en la RaspBerry Pi. App para Smartphone. Se ha realizado una aplicación para SmartPhone llamada “Xpi”, con las siguientes características,la aplicación es libre, estará disponible desde una página web, mediante código QR yse puede descargar desde Market de Google. La aplicación Fig 6, permitirá controlar los diferentes dispositivos conectados mediante protocolo X10, lámparas, toldos, persianas, climatizadores, alarmas, etc. Además mostrará el estado de cada uno de ellos y permitirá el acceso a través de internet a los usuarios. La aplicación se conectará al servidor mediante PHP, y esta será la encargada de almacenar el estado de cada dispositivo, además de ejecutar los comandos enviados por la aplicación. El servidor PHP usará como hio un archivo “PhP”, a través del cual la aplicación escribirá y leerá el estado de los sensores, de esta forma se podrá conocer el estado de dichos sensores al conectarse la aplicación. Fig.6. Pantalla inicial de la app del Smartphone “Xpi” Fig.7. Pantalla de control de una lámpara de la app del Smartphone “Xpi” App inventor Es una aplicación de Google Labs para crear aplicaciones de software para el sistema operativo Android. De forma visual y a partir de un conjunto de herramientas básicas, el usuario puede ir enlazando una serie de bloques para crear la aplicación. El sistema es gratuito y se puede descargar fácilmente de la web. Las aplicaciones fruto de App Inventor están limitadas por su simplicidad, aunque permiten cubrir un gran número de necesidades básicas en un dispositivo móvil. La siguiente imagen muestra parte del código usado para nuestra aplicación. Fig.7. Código AppInventor El diagrama utilizado para hacer funcionar esta parte del código es el que se muestra en la siguiente figura. Fig.8. Diagrama de flujo con el que se ha realizado el software en AppInventor. Pagina Web Se ha diseñado una pagina web con la intención que todas las personas se puedan descargar la aplicación y donde se pretende que la comunidad de interne aporte mejoras al diseño de la aplicación. La web se ha diseñado en html y se ha alojado en un servidor gratuito con la siguiente dirección “www.BusXpi.tk” Fig.9. Imagen de la web implementada Codigo QR Un código QR (quick response code, «código de respuesta rápida») es un módulo útil para almacenar información en unamatriz de puntos. Se caracteriza por los tres cuadrados que se encuentran en las esquinas y que permiten detectar la posición del código al lector. La sigla «QR» se deriva de la frase inglesa «Quick Response» («Respuesta Rápida» en español). Nosotros haremos uso de esta tecnología para que las personas con susterminales móviles puedan de forma rápida descargar la aplicación y encontrar información en la página web. Fig.10. Descarga App Dirección Web Maqueta La siguiente imagen muestra la maqueta diseñada, donde representa una vivienda con 5 habitaciones, en las cuales se han instalado tres modulos X10 entre los que uno de ellos es un dimmer y dos contactores. Cada módulo X10 tiene su dirección alfanumérica. Fig.11. Imagen de la maqueta Instalada. Conclusiones. Se ha conseguido implementar una aplicación para Smartphone, consiguiendo el control completo de unas series de webcam de distintos fabricantes para detectar movimientos, como sistema de seguridad dentro de un recinto, además se controla un bus X10 con total confianza por parte de usuario final. Se ha instalado un pequeño servidor “Raspberry PI” basado en software libre unas series de aplicaciones que dan capacidad a viviendas, empresas y hoteles de gestionar la energía consumida en los dispositivos eléctricos, de manera más eficiente. Se ha instalado un servidor PHP que será el encargado de gestionar los comandos enviados por la aplicación móvil y de almacenar el estado en el que se encuentra cada módulo X10. Se ha realizado una maqueta donde se muestra que por la misma línea de la red eléctrica, sin necesidad de realizar una nueva instalación, es posible controlar los diferentes dispositivos. En el caso de las industrias el ahorro económico sería significativo. Se ha realizado una aplicación para SmartPhone, de descarga libre mediante código QR, desde Market de forma gratuita o desde la página web. De esta forma, una oficina u Hotel da la posibilidad a sus empleados y clientes a gestionar el consumo energético y los tipos de seguridad del sistema, añadiendo un valor muy profesional el sistema de seguridad implementado. Bibliografía. [1] http://developer.berlios.de/projects/heyu/ [2] http://www.heyu.org/ [3] http://es.wikipedia.org/wiki/X10 [4] http://www.umanizales.edu.co/publicaciones/campos/ingenieria/ventana_informatica/ht ml/ ventana11/Domotica.pdf [5] https://www.x10.com/ [6] http://www.penguintutor.com/linux/raspberrypi-webserver [7] http://geekytheory.com/tutorial-raspberry-pi-15-instalacion-de-apache-mysql-php/ [8] http://es.wikipedia.org/wiki/C%C3%B3digo_QR [9] https://sites.google.com/site/appinventormegusta/ [10] http://wiki.epalsite.com/index.php?title=SIM900_QuadBand_GPRS_shield_with_Micro_SD_card_slot#Parameters