3.8. Tutorial Carretilla
3.8.1. Introducción
En este tutorial se va a simular el funcionamiento de una carretilla convencional. Se
simularán
sus
dos
movimientos
principales,
esto
es,
el
movimiento
de
desplazamiento sobre sus ruedas, y el movimiento de elevación de carga llevado a
cabo por su sistema de elevación.
En cuanto a la traslación, la carretilla se acelerará en un intervalo de tiempo, para a
continuación frenarla y obtener la fuerza que se genere en las ruedas delanteras y
en las traseras, que son datos importantes para su dimensionamineto. También se
estudiará la velocidad de las ruedas a lo largo de la simulación.
Figura 110. Tutorial Carretilla 1
Para la elevación, la simulación constará de un proceso de elevación de una caja
hasta el tope de la carretilla (1.8 metros). También en este caso se medirá las
fuerzas de reacción en las fuerzas delanteras y traseras.
El ensamblaje está totalmente definido y restringido en “SolidWorks”, por lo que se
pasará a analizar su movimiento en “SolidWorks Motion”.
Escuela Politécnica Superior de Ingeniería de Gijón
3.8.2. SolidWorks Motion
En “Estudio de movimiento 1” y situarse en la pestaña “Análisis de movimiento”.
Se va a empezar haciendo moverse a la carretilla. En primer lugar, se activará la
gravedad, ya que de ello depende el movimiento de la misma. Sin más que en el
menú de “SolidWorks Motion” escoger “Gravedad”, y en el menú automático
seleccionar la componente Y.
Figura 111. Carretilla 1
A continuación, se elegirá el motor para la carretilla. Para realizar la simulación, es
necesario darles un movimiento de rotación a las ruedas, con lo que se dispondrá un
motor rotatorio en las ruedas delanteras, que harán de ruedas motrices.
Esta simulación durará 12 segundos, durante los cuales la carretilla debe acelerar
para iniciar el movimiento además de elevar la carga mientras decelera su marcha.
Se selecciona “motor rotativo” en el menú de “SolidWorks Motion”, y en los
parámetros se configura como sigue: Dirección, el eje de las ruedas y moviéndose
respecto al suelo.
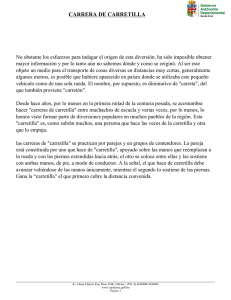
La mayor novedad viene a la hora de seleccionar el movimiento. Se escoge la
opción “Expresión” de la velocidad, y en la ventana f(x) se escribe la fórmula que se
ve en la imagen. Esta fórmula es una sencilla forma de introducirle al programa el
Escuela Politécnica Superior de Ingeniería de Gijón
movimiento que se quiere que realice. Lo que se le está ordenando es que, entre los
segundos 0 y 10, la velocidad sea de 0 a 90 grados/segundo y de 10 a 11 segundos,
esta velocidad vaya en descenso desde esos 90 grados/segundo hasta 0, es decir,
se desacelera la carretilla para que ésta se detenga.
Figura 112. Carretilla 2
Esta forma de introducir comandos es muy útil en “SolidWorks Motion” y no solo se
utiliza para velocidades, sino que también se puede hacer con desplazamientos y
aceleraciones. La arquitectura de la expresión siempre es la misma, variando los
parámetros en función de las necesidades.
El siguiente paso es definir los contactos entre las ruedas de la carretilla y el suelo.
Si no se hiciera esto, el programa no asociaría estos elementos y debido a la
gravedad, la carretilla se “hundiría”.
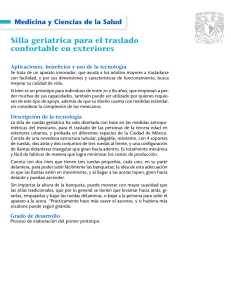
Para definir dichos contactos, en el menú “SolidWorks Motion” se escoge “Contactar”
y se selecciona como componentes para la operación, las ruedas delanteras
(“Wheels_2”) y el suelo (“Ground”). Puesto que los materiales de ruedas y suelo no
se encuentran entre los que hay para escoger, se deshabilita la opción “Especificar
material” y se selecciona “Fricción”. En este punto, se ponen los parámetros que se
ven en la imagen para realizar un contacto con características reales.
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 113. Carretilla 3
Hacer exactamente lo mismo para definir el contacto entre el suelo y las ruedas
traseras. A la hora de seleccionar los componentes de la operación, se escoge en
este caso las ruedas traseras (“Wheels_1”) y el suelo (“Ground”), el resto de
parámetros, los mismos.
Una vez definidos los contactos entre la carretilla y el suelo, la carretilla ya podría
moverse. De hecho, si se simula el modelo en este punto, se ve que la carretilla se
mueve, pero debido a la gravedad, y que no hay nada que lo impida, la parte
delantera de la carretilla “se cae”. Para evitar esto, y conseguir además que la
carretilla eleve su carga, se deberán realizar dos operaciones.
Por una parte, hay que definir un nuevo contacto entre la caja o carga (Crate) y la
horquilla (Fork). Como ya se ha visto, se va al menú de “SolidWorks Motion” y se
selecciona “Contactar”. Se eligen las partes antes citadas y se define el contacto
mediante los materiales, tal y como se puede observar.
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 114. Carretilla 4
El otro paso es simular el mecanismo de elevación. Esto se va a realizar con un
motor lineal o actuador, que simula el efecto que tendría un cilindro hidráulico en la
realidad. En el menú, se selecciona “Motor lineal”, y en el campo “Movimiento”, se
escoge “Distancia”, para que eleve los 1800 mm. de elevación máxima de carretilla a
partir del segundo 5 y durante 5 segundos.
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 115. Carretilla 5
Una vez realizadas todas las operaciones necesarias previas al cálculo del modelo,
ya se puede pasar a “Calcular”. La existencia de numerosos contactos 3D puede
hacer que el cálculo de la simulación necesite muchos recursos y el ordenador tarde
unos segundos. Para agilizar el proceso se puede bajar la precisión de la simulación
en el menú de “SolidWorks Motion”.
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 116. Carretilla 6
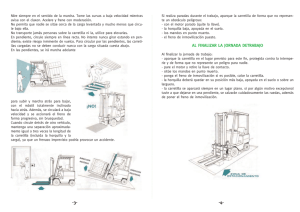
Una vez simulado el mecanismo, se van a analizar los resultados obtenidos.
En primer lugar, se va a estudiar si la velocidad angular de las ruedas es la
adecuada, tal y como se definió en el motor mediante la expresión matemática. Para
ello, en el menú de resultados se escoge la magnitud de la “Velocidades angular” en
una de las ruedas delanteras, como se ve en la imagen.
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 117. Carretilla 7
El resultado que se obtiene es el adecuado, con una velocidad inicial de 0 º/s
(carretilla parada) que aumenta asta alcanzar los 90º/s y que se mantiene constante
hasta el instante t=11, en el que la velocidad comienza a disminuir hasta situarse
nuevamente en 0º/s.
Figura 118. Resultados 1
Si se repite el proceso para las ruedas traseras, se obtiene:
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 119. Resultados 2
El resultado para las traseras es muy similar al anterior, ya que a pesar de no
tratarse de las ruedas motrices, las ruedas traseras siguen una trayectoria idéntica a
las delanteras.
Una vez comprobado que la expresión de la velocidad angular introducida es la
correcta, se van a analizar las fuerzas que se generan en las ruedas, tanto
delanteras como traseras. Para ello, en el menú de “SolidWorks Motion”, se pincha
en “Resultados” y a continuación se escoge magnitud de las “Fuerzas de reacción”.
Para seleccionar la parte que interesa en este caso, se busca en el árbol de
relaciones de posición, y se selecciona “Concéntrica 3”, que es la relación que une
eje y ruedas.
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 120. Carretilla 8
El gráfico de fuerzas resultante para las ruedas delanteras es el siguiente:
Figura 121. Resultados 3
Se opera de igual forma para obtener las reacciones en las ruedas traseras, pero a
la hora de seleccionar la relación de posición, se escoge en este caso “Concéntrica
2”, y se obtiene:
Escuela Politécnica Superior de Ingeniería de Gijón
Figura 122. Resultados 4
Puede observarse que las fuerzas en las ruedas traseras son inferiores a las que se
obtienen en las delanteras, lo cual es lógico, teniendo en cuenta que la mayor parte
de la carga recae sobre las primeras al estar mucho más cerca de ellas.
También se va a comprobar que el actuador eleva la carga los 1800 mm. que están
estipulados. En el menú “Resultados” se escoge “Desplazamiento lineal” en el eje Y,
y se selecciona “LinearMotor 1” . Se acepta, y el resultado que se obtiene es el
siguiente:
Figura 123. Resultados 5
Se observa que la carga esta inicialmente a una altura de 600 mm. sobre el suelo, y
que acaba el recorrido a 2000 mm, con lo que el ascenso ha sido de
aproximadamente estos 1800 mm. tal y como se buscaba.
Escuela Politécnica Superior de Ingeniería de Gijón
Y ya por último, se va a comprobar la fuerza necesaria en el cilindro para sustentar
la carga y levantarla hasta la altura antes descrita.
En el menú “Resultados”, escogemos “Fuerzas”, y “Fuerza aplicada”, seleccionando
la componente Y, ya que es la dirección en la que el cilindro realiza el esfuerzo, y
además se selecciona “Linear Motor 1”. Se acepta y se obtiene el resultado
deseado.
Figura 124. Resultados 6
Se puede ver como a partir del instante en que el cilindro comienza a elevar la
carga, la fuerza aumenta, llegando en sus puntos máximos a valores entorno a los
41 KN.
Escuela Politécnica Superior de Ingeniería de Gijón
 0
0