Descargar - UTN - Universidad Tecnológica Nacional
Anuncio

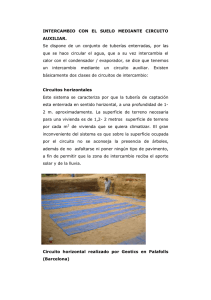
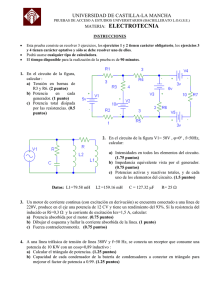
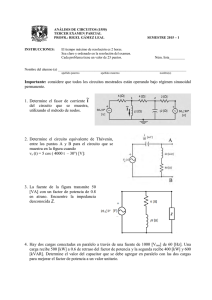
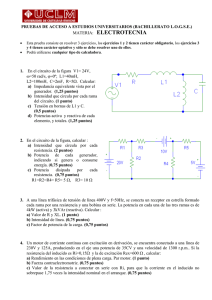
TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO UNIVERSIDAD TECNOLÓGICA NACIONAL FACULTAD REGIONAL MENDOZA APUNTES DE CÁTEDRA DE TEORÍA DE LOS CIRCUITOS I Prof. Dr. Ing. S. Enrique Puliafito E-mail [email protected] CAPITULO 3: RÉGIMEN DINÁMICO EN EL DOMINIO DEL TIEMPO OBJETIVOS GENERALES DE LA ASIGNATURA 1. Proveer los fundamentos de los circuitos lineales e interpretar a éstos en el marco de un sistema lineal comprendiendo y aplicando sus principales propiedades 2. Mostrar cómo el análisis y diseño de circuitos eléctricos están íntimamente relacionados con la capacidad del futuro ingeniero para diseñar complejos sistemas electrónicos de comunicaciones, computación y control. 3. Que el alumno aprenda a resolver circuitos lineales simples. 4. Que el alumno adquiera las habilidades para modelar y resolver sistemas lineales tanto desde el dominio del tiempo como de la frecuencia, y que sea capaz de predecir su comportamiento ante una excitación cualquiera. OBJETIVOS DEL CAPÍTULO III: • Reconocer las señales principales de excitación de sistemas lineales y componer señales arbitrarias a partir de éstas. • Analizar el comportamiento temporal transitorio de circuitos lineales simples a partir de su excitación. • Que el alumno adquiera la habilidad de elaborar un modelo temporal del circuito y prever su comportamiento temporal. • Que el alumno se familiarice con la resolución de ecuaciones diferenciales simples de primer y segundo orden. TEMA A: Circuitos con almacenamiento de energía: 3.A.1 Energía almacenada en los circuitos. 3.A.2. Relaciones de tensión-corriente en circuitos con almacenamiento de energía, valores límites. 3.A.3. Ecuaciones diferenciales en circuitos eléctricos. 3.A.4. Representación de excitaciones discontinuas típicas: función impulsiva, función escalonada, rampa. TEMA B: Régimen transitorio y permanente 3.B.1. Análisis de fenómenos transitorios en sistemas de primer orden. 3.B.2. Excitación por energía interna almacenada inicialmente. 3.B.3. Análisis de fenómenos transitorios en sistemas de segundo orden. 3.B.4. Excitación discontinuas típicas: por energía interna almacenada inicialmente, por función impulsiva, por función escalonada. 3.B.5 Resonancia serie y paralelo en el dominio del tiempo. TIEMPO ESTIMADO DE CURSADO: 3 SEMANAS UNIVERSIDAD TECNOLÓGICA NACIONAL 1 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO TABLA DE CONTENIDO: CAPÍTULO III: RÉGIMEN DINÁMICO EN EL DOMINIO DEL TIEMPO .................... 3 1. El régimen permanente y transitorio ................................................................. 3 1.1 INTRODUCCIÓN .................................................................................................................. 3 1.2 RESPUESTA NATURAL O TRANSITORIA ............................................................................... 3 1.3 RÉGIMEN TRANSITORIO Y PERMANENTE ............................................................................ 4 1.4 DOMINIO DEL TIEMPO Y DOMINO DE LA FRECUENCIA. ....................................................... 4 1.5 RELACIONES VOLT-AMPERE Y CIRCUITOS EQUIVALENTES ................................................. 5 1.5 APLICACIÓN DE LAS LEYES CIRCUITALES A SISTEMAS CON ELEMENTOS ALMACENADORES DE ENERGÍA. ............................................................................................................................ 7 1.6. SEÑALES TÍPICAS Y FUNCIONES SINGULARES.................................................................... 8 1.7 REPRESENTACIÓN CIRCUITAL DE LAS FUNCIONES ............................................................ 12 1.8. CONSTRUCCIÓN DE FUNCIONES ...................................................................................... 13 2. Sistemas de primer orden.................................................................................. 13 2.1 CIRCUITOS DE PRIMER ORDEN CON ENERGÍA INTERNA ALMACENADA ............................. 13 2.2 EXCITACIÓN POR IMPULSO .............................................................................................. 15 2.2.1. Circuito inductivo................................................................................................... 15 2.3 EXCITACIÓN CON UNA FUNCIÓN ESCALÓN. ...................................................................... 17 2.4 EXCITACIÓN CON UNA FUNCIÓN SENOIDAL...................................................................... 21 3. Sistemas de segundo orden.............................................................................. 24 3.1 EXCITACIÓN POR ENERGÍA ALMACENADA INTERNAMENTE .............................................. 24 3.1.1 Solución sobreamortiguada. ................................................................................... 26 3.1.2. Solución crítica ...................................................................................................... 27 3.1.3 Solución subamortiguada........................................................................................ 28 3.2 RESPUESTA A UNA EXCITACIÓN IMPULSIVA ..................................................................... 30 3.2.1 Circuito R-L-C serie................................................................................................ 30 3.2.2 Circuito R-L-C paralelo .......................................................................................... 31 3.3 RESPUESTA A UNA FUNCIÓN ESCALÓN ............................................................................. 33 3.3.1 Circuito R-L-C serie................................................................................................ 33 3.3.2 Circuito R-L-C paralelo .......................................................................................... 35 BIBLIOGRAFÍA: • R. Scott: “Linear Circuits”, Addison-Wesley Publishing Co., 1960 • Dorf y Svoboda, “Circuitos Eléctricos. Introducción al Análisis y Diseños”, Alfaomega, 2000 • R. Ziemer, W. Tranter, R. Fannin: “Signal and Systems. Continuous and discrete”, Macmillian Publishing , New York, 1983. • A. Papoulis: “Signal analysis”., McGrawHill. New York, 1977. • Cunnigham and Stuller: “Basic Circuit Analysis”, 1995 • 3. M. Van Walkenberg: “Análisis de Redes”, Limusa.,1994 • H. Pueyo y C. Marco: “Análisis de modelos circuitales”,Tomos I y II. Arbó, 1985 • W. Hyat and J. Kemmerly: “Análisis de Circuitos en Ingeniería”, Mc Graw Hill., 1985 UNIVERSIDAD TECNOLÓGICA NACIONAL 2 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO CAPÍTULO III: RÉGIMEN DINÁMICO EN EL DOMINIO DEL TIEMPO 1. El régimen permanente y transitorio 1.1 Introducción Los parámetros fundamentales de un circuito eléctrico pasivo son la resistencia, la inductancia y la capacidad. La resistencia de un circuito eléctrico es el responsable de un proceso energético irreversible que conocemos como disipación de calor. En efecto, toda vez que circula corriente por la misma se produce un proceso de transformación de la energía eléctrica suministrada, la cual se disipa en el medio circundante en forma de calor. La inductancia y la capacidad de un circuito eléctrico son responsables de poner de manifiesto las propiedades de almacenamiento de energía eléctrica en forma de campo magnético concatenado al mismo, o de campo eléctrico almacenado en el dieléctrico circundante al mismo. Debido a las relaciones de volt-ampere de ambos elementos almacenadores del circuito, el equilibrio eléctrico será descrito matemáticamente mediante ecuaciones diferenciales cuyas soluciones serán funciones del tiempo. Como consecuencia de ello podemos decir que la introducción de tales elementos en el circuito posibilita la existencia de los fenómenos transitorios. De todas formas, cabe hacer notar que las leyes y propiedades generales resultan aplicables aún cuando las respuestas del circuito resulten funciones del tiempo. Tal como sabemos, toda ecuación diferencial puede ser homogénea o no homogénea según que en el segundo miembro esté igualado a cero o no. En el segundo caso aparecerá en general la función de excitación responsable de forzar la respuesta del sistema. Físicamente ello corresponde a la descripción de una evolución del sistema en el tiempo como consecuencia de la existencia de un régimen libre o natural o de un régimen forzado de excitación externa del mismo. 1.2 Respuesta natural o transitoria La ecuación diferencial será por lo tanto homogénea cuando describe la evolución de un sistema que originalmente tenga almacenada una cierta cantidad de energía y que por la acción de algún dispositivo, tal como una llave, en un cierto instante de tiempo fue dejado librado a su propia evolución en un tiempo de régimen que denominaremos libre o natural. La evolución natural será, en general para un sistema real, de relativa corta duración, por lo que se denomina también régimen transitorio. El comportamiento natural o transitorio sólo puede depender de las propiedades intrínsecas del sistema caracterizado, y no está influenciado por la acción de la excitación externa. Otra forma de producir un almacenamiento de energía interna en la capacidad o inductancia, si estas están originalmente en reposo (o descargadas), es aplicando una excitación de corta duración pero con suficiente energía como para transferir esa carga a los elementos almacenadores. Una vez desaparecida esa excitación, el circuito queda librado a su propia evolución, describiendo el mismo comportamiento natural o transitorio. UNIVERSIDAD TECNOLÓGICA NACIONAL 3 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO 1.3 Régimen transitorio y permanente Otra situación muy frecuente es la que resulta de la excitación de los sistemas físicos mediante agentes externos que actúan en general durante prolongados períodos de tiempo. La descripción matemática respectiva será mediante un ecuación diferencial no homogénea. la solución completa tiene dos términos, una la solución homogénea o de régimen transitoria, y la otra particular o de régimen permanente. La solución homogénea se resuelve haciendo nula la excitación (igualando a cero la ecuación diferencial). La solución permanente es una solución particular de la ecuación diferencial, y depende fuertemente de la función de excitación y de las condiciones de contorno o particulares del sistema. La interpretación física de la existencia de ambas soluciones es sencilla. Si considerando que un sistema está originalmente en reposo (sin energía interna), o en un cierto estado de energía; la acción de un agente externo produce una perturbación más o menos notable sobre ese estado energético inicial. La reacción inicial del circuito será en general de oposición a todo cambio de estado energético. Pero como cada sistema posee una función de respuesta natural propia de su estructura interna, este comportamiento natural se pone de manifiesto cuando el sistema es excitado externamente. Sin embargo, si la excitación eterna permanece, con una dada función del tiempo, ésta fuerza al circuito a pasar a un nivel energético distinto del anterior. Una vez que cesa la respuesta natural o función transitoria de reacción, el sistema se estabiliza en el estado energético que le exige el agente externo. Por lo tanto, para tiempos pequeños domina la respuesta transitoria, pero para tiempos largos, comparados con la constante de tiempo del sistema, prevalece la respuesta permanente. Finalmente debe notarse que los fenómenos transitorios aparecen siempre que se accionan ciertos dispositivos que provocan un cambio en la configuración del circuito, adicionando o eliminando secciones del circuito, a través de llaves, interruptores, transistores, etc.; o cuando aparecen procesos inesperados, como fallos, cortocircuitos, etc. Estas situaciones configuran una variación brusca en el balance energético del sistema, por lo que el sistema busca adecuarse al nuevo nivel de equilibrio, en ese período corto llamado transitorio. 1.4 Dominio del tiempo y domino de la frecuencia. Como ya se anticipara, los fenómenos transitorios aparecen como consecuencia de la introducción de elementos almacenadores de energía en los circuitos. Debido a las relaciones volt-ampere tanto de la inductancia como de la capacidad, las leyes de equilibrio del circuito deben manifestarse mediante ecuaciones diferenciales, cuya solución para la corriente y la tensión serán funciones del tiempo. Como excitación al circuito puede aparecer cualquier tipo de función del tiempo. Sin embargo podemos clasificar a estas funciones en dos grupos importantes: singulares y arbitrarias. Entre las funciones singulares más importantes está, el escalón, el impulso y la senoidal. Las funciones arbitrarias pueden descomponerse como suma de las anteriores, y por el principio de superposición, tratamos entonces a una función arbitraria como suma de funciones singulares. Cuando la excitación se desarrolla como suma de impulsos o escalones se dice que el circuito se desenvuelve en el dominio del tiempo. En cambio, si la excitaciones son una composición de senoidales, se dice que el problema pertenece al dominio de las frecuencias. Los fenómenos transitorios son problemas que pertenecen al domino del tiempo. En cambio los problemas de la corriente alterna pertenecen al régimen del dominio de la frecuencia y solución al estado permanente, pues se supone que los transitorios ya pasaron. UNIVERSIDAD TECNOLÓGICA NACIONAL 4 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO 1.5 Relaciones volt-ampere y circuitos equivalentes Ya vimos en el primer capítulo cuáles eran las relaciones volt-ampere de los elementos pasivos. En el siguiente cuadro resumimos las principales funciones apuntando a establecer los modelos equivalentes de estos elementos. En las relaciones descriptas en la tabla se han incluido las relaciones de potencia y energía. Tabla 3.1: Principales relaciones volt-ampere para los elementos pasivos. Elemento circuital Relaciones de tensión-corriente Relaciones corriente-tensión e = i×R i = e×G p = e i = i2 R = 2 e R t i= 1 e dt L −∫∞ i= 1 1 1 e dt = ∫ e dt + ∫ e dt ∫ L −∞ L −∞ L0 0 t t t 1 i = I 0 + ∫ e dt L0 di p = e i = Li dt di e=L dt t t I di WL = ∫ ei dt = ∫ Li dt = ∫ Li di dt −∞ −∞ 0 0 t t 1 1 1 e = ∫ i dt = ∫ i dt + ∫ i dt C −∞ C −∞ C0 t 1 i dt C ∫0 de p = ei = Ce dt e = E0 + t t −∞ −∞ WC = ∫ ei dt = ∫ Ce i=C de dt E de 1 dt = ∫ Ce de = CE2 dt 2 0 Se aprecia que la corriente en una inductancia, para t=0 será: 0 1 i = I 0 + ∫ e dt = I 0 ; lo que significa que la inductancia para t=0 no acepta nueva corriente, L0 por ello el circuito equivalente es un circuito abierto (ver tabla 3.2), si la inductancia está cargada, el circuito equivalente para t=0 incluye una fuente de corriente en paralelo con el valor de la corriente inicial. El hecho que la corriente en la inductancia sea cero, no significa que su derivada sea cero. UNIVERSIDAD TECNOLÓGICA NACIONAL 5 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO De manera análoga ocurre en el capacitor; para t=0 será: 0 1 e = E0 + ∫ i dt = E0 , una tensión 0 significa que se puede reemplazar la capacidad por un C0 corto circuito. Si la capacidad estaba inicialmente cargada, entonces se agrega en serie un generador de tensión con el valor inicial (ver tabla 3.2). Tabla 3.2: Circuitos equivalentes para los elementos pasivos y almacenadores de energía para t=0 y t=∞. Elemento circuital t=0 t=∞ Para t=∞, la inductancia se ha cargado y ya no admite ninguna corriente extra, por lo que será indiferente a todo nuevo cambio de corriente, esto implica que cualquiera sea la corriente, esta circulará por el circuito, entonces se puede asociar a un corto circuito. Para el capacitor, para un tiempo muy grande, éste no admite nuevas cargas, por lo que no habrá corriente circulando por esa rama del circuito, entonces lo asociamos a un circuito abierto. Para t=∞, tanto la corriente inicial Io y la tensión Eo ya se han descargado en el resto del circuito, no apareciendo en el circuito equivalente final. UNIVERSIDAD TECNOLÓGICA NACIONAL 6 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 1.5 Aplicación de las leyes almacenadores de energía. circuitales S. ENRIQUE PULIAFITO a sistemas con elementos Al ser las inductancias y capacidades elementos pasivos lineales, se aplican todas las leyes circuitales vistas en los capítulos precedentes para circuitos resistivos. Esto es, los principios de linealidad, superoposición, sustitución, leyes de Kirchhoff, teoremas de Thèvenin y Norton, etc., son de aplicación general, como lo iremos viendo en los puntos siguientes. A modo de ejemplo, en los circuitos de la figura 3.1 siguiente se aplicará el concepto de corrientes en las mallas y en tensiones nodales. Figura 3.1 Aplicando corriente en las mallas sobre el circuito (a) queda: t di 1 e( t ) = eR + eL + eC = iR + L + ∫ i dt dt C − ∞ Aplicando tensiones nodales sobre el circuito (b) da: t de 1 1 i( t ) = iR + iL + iC = e + C + ∫ e dt . R dt L − ∞ (3.1) (3.2) En el caso de la figura 3.1 (a) hay una sola malla, en caso de existir otras mallas vecinas, se deberá operar en forma similar a lo visto para resistencias, es decir se deberá restar la tensión de la rama común, expresada como relación volt-ampere de la corriente de malla vecina. Figura 3.2 Las ecuaciones de mallas serán: UNIVERSIDAD TECNOLÓGICA NACIONAL 7 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 ⎧ di1 1 t di e ( t ) = i R + L + i1 dt − L 2 ⎪ 1 1 ∫ dt C1 −∞ dt ⎪ ⎨ t ⎪ 0 = − L di1 + i R + L di2 + 1 i dt 2 2 2 ⎪ dt dt C 2 −∫∞ ⎩ S. ENRIQUE PULIAFITO (3.3) Para calcular la corriente i1 o i2, éstas se podrán resolver por determinantes, con mayor o menor dificultad. Las ecuaciones de malla o nodo (3.1), (3.2) o (3.3) son similares a las planteadas para las resistencias pero necesariamente incluyen ecuaciones diferenciales e integrales. En los capítulos sucesivos, veremos la solución a los mismos. Ahora simplemente se desea enfatizar que el circuito ya no queda expresado por medio de una o varias constantes, por ejemplo, la Req en los dipolos o los parámetros r11,r12 y r22 en los cuadripolos, sino que su caracterización implica una función del tiempo, que surgirá de la solución de las ecuaciones diferenciales. 1.6. Señales típicas y funciones singulares. Antes de iniciar el análisis temporal de los circuitos es conviene primeramente recordar algunos conceptos y definiciones de señales, y posteriormente dar las principales funciones singulares, de las cuales surgen todas las demás. Algunas de las definiciones más usadas son: Señales determinísticas: Son aquellas variables que quedan completamente especificadas para cualquier tiempo t. A× t 2 x(t )= − ∞ < t < ∞ A, B : ctes B + t2 Las señales determinísticas podrán ser continuas o discretas. Señales continuas y discretas: Una función es continua del tiempo, si para todo tiempo t existe un valor de la variable. Es, en cambio, discreta, cuando la función está definida para algunos valores (discretos) de la variable independiente (p. ej. el tiempo). Puede ser el caso en que la señal ha sido muestreada sólo para algunos momentos de t. Para los otros valores de t, la señal podrá existir, ser nula, o simplemente no ser de interés. Señales cuantizadas: Es una variable continua, cuyos valores han sido aproximados o representados para valores discretos, es decir un número finito de niveles. Señales periódicas y no periódicas: Son señales periódicas aquellas variables cuyo valor de la función se repite, luego de cada periodo T0, para todo tiempo t. Esto es, cumple que: y(t) = y(t+T0) Por ejemplo, una señal periódica muy común es la señal senoidal: x(t) = A sin(2πf0t + θ), para -∞ < t < ∞, donde A, f0 , θ son constantes llamadas, amplitud, frecuencia (Hertz:1/s) y fase. También se usa la frecuencia angular ω0=2πf0 (rad/s). El período de la señal es T0=2π/ω0= 1/ f0 UNIVERSIDAD TECNOLÓGICA NACIONAL 8 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO y Señalcontinua continua señal t y t Señal discreta o muestreada y y t Señal cuantizada y T0 t t+T0 Señal periódica y(t) = y(t+T0) t Figura 3.2: Tipos de Señales Señales o funciones singulares: Dentro de la clasificación de señales no periódicas, están las señales singulares. Entre ellas definiremos, la función impulso unitario, el escalón unitario, y la rampa unitaria (figura 3.3). ⎧0, t < 0 Escalón unitario u-1(t), se define como: u −1 ( t ) = ⎨ ⎩1, t > 0 ⎧0, t < 0 Rampa unitaria u-2(t), se define como: u −2 ( t ) = ⎨ ⎩1, t > 0 UNIVERSIDAD TECNOLÓGICA NACIONAL 9 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO ⎧0, t ≠ 0 ⎪∞ t = 0 ⎪ Impulso unitario u0(t) se define como: u 0 ( t ) = ⎨ ∞ ⎪ u ( t )dt = 1 ∫ 0 ⎪⎩−∞ El escalón, es junto con el impulso la función más importante en los circuitos eléctricos. Este escalón representa la apertura o cerrado de una llave. Por medio de ésta incorporamos o extraemos una sección del circuito, etc., lo que genera de por sí un fenómeno transitorio de adaptación de un nivel de energía al siguiente, como ya se dijo en la introducción de este capítulo. El impulso, es una función de duración muy corta y de amplitud muy elevada, pero cuya integral es unitaria. Esta área unitaria se obtiene en un tiempo infinitesimal. La importancia en definir este impulso surge de la necesidad de representar fenómenos que ocurren en un intervalo de tiempo muy corto, comparado con la escala del sistema, por ejemplo de la resolución de los instrumentos de medición, y con una amplitud mayor que los niveles normales de entrada al sistema. Este impulso entrega una carga en tiempo casi instantáneo al sistema, desarrollando una salida que se extiende más allá del momento de acción del impulso. Así hemos de representar la carga de los elementos almacenadores de energía a través de la acción de un impulso. Estas funciones están relacionadas entre sí de la siguiente forma: t du ( t ) u −2 ( t ) = ∫ u −1 ( λ )dλ u 0 ( t ) = −1 dt −∞ (3.4) La función derivada o integral puede asociarse como un dipolo en el que contiene una inductancia o una capacidad. Si se revé sus relaciones volt-ampere (Tabla 3.1) la corriente y la tensión están relacionadas entre sí por medio de la integral o la derivada. Por lo tanto una inductancia puede ser un circuito dipolo derivador, si se considera a la corriente como entrada y la tensión es la salida. Análogamente podemos decir del uso del capacitor. Existen algunas relaciones funcionales respecto del impulso que es importante recordar, a partir de la definición de la integral del impulso igual a la unidad: 1. Producto del impulso por una función continua x(t) ∞ ∫ x( t )u ( t )dt = x( 0 ) (3.5) 0 −∞ 2. Cambio de escala. Si a es una constante, entonces 1 u0 ( at ) = u0 ( t ) a De aquí se desprende que el impulso es una función par. Haciendo a=-1, u0(-t)=u0(t) 3. Desplazamiento en t. Si desplazamos el impulso un tiempo t0, suponiendo a x(t) una función continua: ∞ ∫ x( t )u ( t − t 0 0 )dt = x( t0 ) −∞ Haciendo τ=t-t0, podemos re escribir la ecuación anterior como UNIVERSIDAD TECNOLÓGICA NACIONAL 10 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO ∞ ∫ x(τ + t ) × u (τ)dτ = x(t ) 0 0 0 −∞ Una forma alternativa de escribir la ecuación (3.6) haciendo el tiempo de aplicación del impulso t0 como una variable τ , queda la integral de convolución, que definiremos más adelante nuevamente: ∞ ∫ x(τ) × u (t − τ)dτ = x(t ) (3.6) 0 −∞ u0(t) ∞ impulso unitario (Área)=1 t=0 t u-1(t) escalón unitario 1 t=0 t u-2(t) rampa unitaria 1 t=0 t=1 t Figura 3.3: Funciones singulares UNIVERSIDAD TECNOLÓGICA NACIONAL 11 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO 1.7 Representación circuital de las funciones a) Función escalón: Un escalón de tensión, o un escalón de corriente puede construirse con una fuente ideal y una llave, como se representa en las figuras 3.4 (a) y (b). En el primer caso la llave se cierra para t=0, y en el segundo se abre para t=0. + E + e(t) t=0 - e( t ) = E u−1 ( t ) - (a) i(t) i( t ) = I u−1 ( t ) t=0 I (b) Figura 3.4 b) Representación de un impulso: Una función impulso puede conformarse también como la derivada de la función escalón. Una función derivada se puede construir mediante elementos L ó C, según sea la relación volt-ampere que se aplique (figura 3.5 (a)). c) Representación de una rampa: Ésta se puede lograr mediante la integral del escalón. Nuevamente la función integral se construye con elementos L ó C según la relación voltampere usada (figura 3.5 (b)). + 1 t=0 d + dt e( t ) = - du−1 ( t ) = u0 ( t ) dt - (a) + 1 t=0 + ∫ dt t e( t ) = ∫ u−1 ( t )dt = u−2 ( t ) 0 - - (b) Figura 3.5 UNIVERSIDAD TECNOLÓGICA NACIONAL 12 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO 1.8. Construcción de funciones La aplicación del teorema de la linealidad y la superposición, permite describir una señal cualquiera como una composición de señales singulares. Por ejemplo, en la figura siguiente 3.6, se ha construido una señal cuadrada como la suma de impulsos unitarios. x( t ) = u −1 ( t ) − u −1 ( t − 1 ) + u −1 ( t − 2 ) − u −1 ( t − 3 ) + u −1 ( t − 4 ) − L Figura 3.6 Una vez construida esta señal, la salida que produce esta señal aplicada al circuito será la suma de las salidas de cada una de las señales singulares individuales. Otras señales más complicadas pueden construirse con rampas, o impulsos. Como generalización de este procedimiento, si se descompone una señal en una suma de impulsos, la respuesta a la salida se analiza a través de la integral de convolución o superposición. Si en cambio, la señal de entrada al sistema, se descompone en suma de funciones senoidales, el análisis de la salida dará origen a la integral de Fourier. Ambos tipos de tratamientos se verán más adelante. 2. Sistemas de primer orden 2.1 Circuitos de primer orden con energía interna almacenada Un circuito eléctrico con un único elemento almacenador de energía queda representado por una ecuación diferencial de primer orden. La solución del problema requiere sin embargo del conocimiento del valor de esa energía inicial, normalmente en forma de una corriente almacenada en una inductancia o una tensión inicial en un capacitor. Por lo tanto el problema tiene dos partes, a) la solución de la ecuación diferencial, b) dar el valor de inicial de la variable investigada. Resolvamos el circuito de la figura 3.7. En éste se aprecia una inductancia cargada inicialmente con una corriente Io. La ecuación diferencial del circuito se escribirá, según ya lo dijimos anteriormente, esto es: 0 = iR + L di dt (3.7) Nótese que (3.7) está igualada a cero, pues no existe excitación aplicada al circuito. Una vez que se cierra la llave, el circuito sólo tiene la corriente almacenada en la inductancia L, ésta comienza a circular, descargándose su energía a través de la resistencia R. Como no existe una fuente externa, se dice que el circuito es librado a su propio funcionamiento. La variación de la corriente en el tiempo será en general breve en el tiempo, será la respuesta del UNIVERSIDAD TECNOLÓGICA NACIONAL 13 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO sistema porque sólo depende de las variables propias del circuito. Matemáticamente esta función surge de resolver la ecuación diferencial homogénea (está igualada a cero), por lo que la solución también recibe el nombre de solución homogénea, natural o transitoria. Para resolver la ecuación diferencial 3.7 se procede al método de separación de variables: di R (3.8) = − dt L i Integrando ambos miembros entre t = 0 y t = t, corresponde a integrar i entre i = Io e i=i: i t di R = ∫Io i ∫0 ( − L )dt , R t, L log i − log Io = − (3.9) i = Io e − Rt / L Io 10 R= 10 ohm L= 5 Henry Tau=L/R= 0.5 s Io = 10 A 8 I (A) 6 4 Io/e 2 0 0 Tau=L/R 1 2 Tiempo t Figura 3.7 Todo sistema de primer orden tendrá una solución del tipo x( t ) = A e −t / τ ; (3.10) donde τ es la llamada constante de tiempo del sistema. En el circuito serie de la figura 3.7 τ=L/R, y A es una constante de escala que representa el valor inicial del sistema. Si hacemos t=0, entonces x( 0 ) = A e 0 = A = x 0 . Como se ve de la figura 3.7, la respuesta es del tipo exponencial decreciente. Para t=τ , (3.9) o (3.10) queda: Io ≅ 0.37 Io , e donde prácticamente la señal ha decaído más de un tercio. Para varias veces τ, (>5 veces) el transitorio se puede considerar finalizado. i( τ ) = Io e −1 = UNIVERSIDAD TECNOLÓGICA NACIONAL 14 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Analicemos en forma similar un circuito serie con una resistencia R y un capacitor C cargado con una tensión inicial Eo. Según se grafica en la figura 3.8. La ecuación diferencial que representa este circuito es t 1 0 = Ri + ∫ i dt C −∞ di i + dt C i( t ) = A e −t / τ 0=R (3.11) Vemos que el tipo de respuesta es similar al anterior, quedando por definir los valores de las constantes A y τ. La constante de tiempo τ=RC, y surge de comparar los coeficientes de la variable derivada y sin derivar en (3.7) y (3.11). La constante A debe analizarse desde el circuito equivalente para t=0 (figura 3.7 (b)) y en la expresión 3.11 : Eo i( 0 ) = A = i0 = R Figura 3.8 2.2 Excitación por impulso 2.2.1. Circuito inductivo Consideramos ahora un circuito de primer orden R-L descargado al que se excita con una función impulso. Calcularemos cuánto se carga la inductancia y su respuesta transitoria. La ecuación diferencial de primer orden queda representada por di (3.12) u0 ( t ) = L + Ri para todo t dt Para t > 0 el impulso u0(t) desaparece por lo tanto la ecuación diferencial queda: di 0 = L + Ri para t > 0 ; dt Esta ecuación es equivalente a la ya vista en un circuito RL cargado inicialmente, por lo tanto su respuesta será: i( t ) = Io e − t /τ (3.13) donde τ=L/R. Queda ahora calcular cuál será el valor de la corriente inicial Io. Para ello analizaremos el circuito equivalente para tres momentos t= 0-, 0 y 0+ UNIVERSIDAD TECNOLÓGICA NACIONAL 15 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO a) El instante 0- es un momento infinitamente pequeño antes que el impulso esté aplicado. El circuito equivalente corresponde al circuito de la figura (b). La corriente es 0 pues no hay excitación. b) El instante 0 es aquel donde el impulso está presente. La inductancia reacciona abriéndose y toda la tensión del impulso está aplicada en la inductancia (figura (c)). Por lo que la corriente inducida en la inductancia será: 0+ i( 0 + ) = 0+ 1 1 1 eL ( t )dt = ∫ u0 ( t )dt = = Io ∫ L 0− L 0− L 0+ (3.14) ya que ∫ u0 ( t )dt = 1 0− c) Para el instante 0+, la energía del impulso ya se transfirió a la inductancia, con un valor de corriente Io = 1/L (figura (d)). Finalmente la respuesta total será siendo la correspondiente al transitorio de un sistema de primer orden (ver figura 3.10 (a)): 1 (3.15) i( t ) = Io e − t /τ = e − t /τ L La suma de las tensiones de la malla de la figura (a) será: 0=-u0 + eL + eR , por lo tanto la tensión en la inductancia, eL será: R (3.16) eL ( t ) = u0 ( t ) − e R = u0 ( t ) − e − Rt / L u−1 ( t ); para todo t L Esta tensión se grafica en la figura 3.10 (b) siguiente. Figura 3.9 UNIVERSIDAD TECNOLÓGICA NACIONAL 16 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 6 5 10 R= 15 ohm L= 3 Henry Tau=L/R= 0.2 s Io = 10 A Io=1/L 7.5 3 2.5 2 0 1 -2.5 0 0.00 0.25 0.50 0.75 R= 15 ohm L= 3 Henry Tau=L/R= 0.2 s Io = 10 A 5 e(t) 4 i(t) S. ENRIQUE PULIAFITO -5 0.00 1.00 1.25 Tiem po t 0.25 0.50 0.75 1.00 1.25 Tiem po t (b) (a) Figura 3.10 2.3 Excitación con una función escalón. Veremos a continuación la respuesta transitoria de un sistema de primer grado excitado con una función escalonada. En estos casos, la ecuación diferencial del circuito estará igualada a una función del tiempo, en este caso la u-1(t). Al no estar igualada a cero, su solución será la superposición de la solución general (u homogénea, natural o transitoria) más una solución particular (o de estado permanente). Para resolver la situación particular se requiere plantear correctamente las condiciones de contorno del sistema. La ecuación diferencial del circuito de la figura 3.11 será: L di + Ri = E dt (3.17) La ecuación (3.17) puede resolverse, por ejemplo, por separación de variables. di R = dt ; E/R−i L i t di R ∫Io E / R − i = L ∫0 dt; v E −i haciendo R dv = − di v= t dv R ∫vo − v = L ∫0 dt; ln v − ln vo = − R t L R ⎛ E/R−i ⎞ ln⎜ ⎟=− t L ⎝ E / R − Io ⎠ La solución particular exige determinar el valor de la corriente inicial Io. Ésta se evalúa para el circuito equivalente para t =0 (figura 3.11 (b)). DE allí surge que Io = 0. Entonces, la solución será UNIVERSIDAD TECNOLÓGICA NACIONAL 17 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO E (1 − e − Rt / L ); R E (3.18) de donde es la solución particular y R E − e − Rt / L es la solución transitoria R El valor de i = E/R, la solución la estado permanente, es también la solución para el circuito equivalente para t = ∞, según se ve en la parte (c) de la figura 3.11. La tensiones en la resistencia y la inductancia serán simplemente: i (t ) = eR = i (t ) R = E (1 − e − Rt / L ); eL = L (3.19) di = E − eR = Ee − Rt / L dt t=0 t=∞ Figura 3.11 La figura 3.12 muestra los valores de las corrientes y tensiones para el circuito RL excitado con la función escalón. La corriente en la inductancia se hace asintótica a su valor final a medida que pasa el tiempo, ya que en el infinito, la inductancia ya no tiene posibilidad de seguir reaccionando, es decir de almacenar más corriente, y por lo tanto se hace indiferente a cualquier corriente. Esta reacción se representa en la tensión el, que va tendiendo a cero. Nótese además, que mientras que la corriente inicial es 0, su derivada no lo es, recuérdese que di eL = . dt L Otra forma de analizar la respuesta al escalón es partir de la respuesta al impulso. Recordando que el escalón es la integral del impulso, la respuesta al escalón es la integral de la respuesta al impulso. UNIVERSIDAD TECNOLÓGICA NACIONAL 18 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Si la respuesta al impulso unitario en un circuito R-L es (ver ecuación 3.15) 1 i( t ) = Ioe − t / τ = e − t / τ L Sistemas de primer orden i(t) ER(t) EL(t) 12 10 E i(t),e(t) 8 R=5 ohm L=2 H Tau=L/R = 0.4 s E= 10V 6 4 E/R 2 0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 Tiempo t Figura 3.12 La respuesta a un escalón unitario será: t 1 1 L 1 i( t )escalón = ∫ e − Rt / L dt = − × e − Rt / L t0 = ( 1 − e − Rt / L ) ; L L R R 0 la respuesta a un escalón de valor E será E veces (3.20): E i( t )escalón = ( 1 − e − Rt / L ) , R que coincide con el valor obtenido en (3.18). (3.20) (3.21) De forma análoga a lo anterior, se puede evaluar el circuito de primer orden R-C de la figura 3.13. Su ecuación diferencial será: t 1 (3.22) Ri + ∫ i dt = Eu−1( t ) C −∞ La solución del circuito puede analizarse como una suma de dos soluciones, la solución homogénea más la solución particular evaluada a la luz de las condiciones de contorno. La solución homogénea se resuelve igualando la ecuación diferencial 3.22 a cero: t 1 Ri + ∫ i dt = 0 C −∞ UNIVERSIDAD TECNOLÓGICA NACIONAL 19 (3.23) FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO La ecuación (3.23) tiene como solución, según 3.11, i( t )trans . = i0e − t /( RC ) , como ya se vió anteriormente para evaluar i0 se debe estudiar el circuito equivalente para t=0 (figura (3.13 (b)). De allí se ve que i0=E/R. Por lo tanto la respuesta transitoria u homogénea es: E (3.24) i( t )trans . = e − t /( RC ) R t=∞ t=0 Figura 3.13 Sistema RC con excitación escalonada 6 eR(t) eC(t) i(t) 5 E i(t), e(t) 4 R= 2 ohm C= 0.5 F Tau=RC = 1 s E=5 V E/R=2.5 A 3 E/R 2 1 0 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Tiempo t Figura 3.14 UNIVERSIDAD TECNOLÓGICA NACIONAL 20 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO La solución permanente o particular se evalúa analizando la corriente para t=∞. Usando el circuito equivalente de la figura (c), se obtiene iperm(∞)=0. Por lo tanto la solución completa será icompl = iperm + itrans E − t /( RC ) e R La tensión en la resistencia y la capacidad será: i( t )compl = (3.25) eR = i( t )R = Ee− t / RC ; eC = E − eR = E( 1 − e − t /( RC ) ) En la figura 3.14 se representan las tensiones y corrientes correspondientes. En ésta se aprecia que la tensión en el capacitor se va cargando hasta que su valor va tendiendo a E. Por lo tanto la corriente va disminuyendo a medida que el tiempo tiende a infinito. 2.4 Excitación con una función senoidal. Veamos a hora un sistema de primer orden R-L excitado con un generador de tensión senoidal. La figura 3.15 representa el circuito correspondiente. La ecuación diferencial que representa la corriente es: di (3.26) L + Ri = E sin wt u−1( t ) dt Al ser una ecuación diferencial completa, la solución será la suma de la transitoria más una solución particular o de estado permanente. La solución particular se obtiene igualando a cero la ecuación diferencial, obteniéndose, como ya hemos visto la solución transitoria (3.13) i( t )trans = Ae − Rt / L (3.27) Figura 3.15 La solución permanente o particular se puede obtener, por ejemplo, suponiendo una solución y luego reemplazar en la ecuación diferencial (3.26) para ver su verificación. Este método, aunque parezca arbitrario, se usa especialmente en aquellas funciones que cumplen la condición que su derivada o integral dan una función similar pero con constantes distintas. Este es el caso para las funciones exponenciales y senoidales. Para el caso de la solución UNIVERSIDAD TECNOLÓGICA NACIONAL 21 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO supuesta, la función senoidal, tanto su derivada como su integral dan otra función senoidal de la misma frecuencia, pero con otra fase y otra amplitud. Esta propiedad da origen al denominado régimen o dominio de la frecuencia, como ya se explicó en la introducción al capítulo y se verá en capítulos sucesivos. Entonces una solución particular será: i( t )perm = B1 cos wt + B2 sin wt , (3.28) su derivada será: di perm = − B1 w sin wt + B2 w cos wt , (3.29) dt reemplazando (3.28) y (3.29) en (3.26) para ver si verifica ser una solución de la ecuación diferencial: L( − B1 w sin wt + B2 w cos wt ) + R( B1 cos wt + B2 sin wt ) = E sin wt sin wt( − LB1w + RB2 − E ) + cos wt( LB2 w + RB1 ) = 0 Si la propuesta es una solución, entonces debe cumplirse que para todo t, los paréntesis sean igual a cero. Por lo tanto: LB2 w + RB1 = 0 ⎧ ⎨ ⎩− LB1w + RB2 − E = 0 o sea − wLE ⎧ ⎪⎪B1 = ( wL )2 + R 2 ⎨ RE ⎪ B2 = ⎪⎩ ( wL )2 + R 2 Por lo tanto la solución al estado permanente será: i( t )perm = RE − wLE cos wt + sin wt 2 2 ( wL ) + R ( wL )2 + R 2 (3.30) La solución completa será la suma de la transitoria (3.27) y la anterior (3.30): RE − wLE cos wt + sin wt 2 2 ( wL ) + R ( wL )2 + R 2 El valor de la constante A se obtiene analizando el circuito equivalente para t=0. Ya que i(0)=0, entonces: E i( 0 ) = 0 = A + ( − wL ) ( wL )2 + R 2 wLE A= ( wL )2 + R 2 La solución final será: i( t ) = Ae − Rt / L + i( t ) = wLE E e − Rt / L + ( − wL cos wt + R sin wt ) 2 2 ( wL ) + R ( wL )2 + R 2 UNIVERSIDAD TECNOLÓGICA NACIONAL 22 (3.31) FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Se aprecia entonces que la corriente que circulará en el circuito es también del tipo senoidal, de la misma frecuencia, pero con otra fase. Llamando : A= EwL RE ; B= ; C= 2 2 ( wL ) + R ( wL )2 + R 2 A2 + B 2 = E ( wL )2 + R 2 ; θ = tg −1 B R = tg −1 A ( − wL ) i( t ) = Ae − Rt / L + C cos( wt − θ ) Nótese que en esta expresión, el primer término exponencial desaparecerá luego de varias veces τ=L/R, quedando sólo la solución senoidal. Excitación senoidal sobre un circuito R-L 6 R=1 Ω L=0.5 Hy ω=1 Hz E=5 V i(t) 4 entrada e(t) i(t), e(t) 2 0 -2 -4 -6 0 1 2 3 4 5 6 7 8 9 10 Tiempo t Figura 3.16 La figura 3.16 muestra un ejemplo de la corriente de salida. En ella se compara la entrada e(t) con la salida i(t). Nótese que el circuito RL produce sólo un desfasaje sobre la entrada, pero la frecuencia se mantiene constante. Únicamente para los primeros segundos se aprecia un cambio de pendiente de la corriente respecto de la tensión, pero luego, en el segundo ciclo prácticamente la salida sigue a la entrada. UNIVERSIDAD TECNOLÓGICA NACIONAL 23 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO 3. Sistemas de segundo orden Uno de los principios básicos de la naturaleza es el principio de conservación de la energía. Este principio establece que la energía puede cambiar su forma de manifestación pero el balance neto permanece constante. En los sistemas de segundo orden aparecen dos elementos almacenadores de energía y un elemento disipador del mismo. La energía puesta en el sistema va alternando el almacenamiento de energía en forma de campo magnético a energía en forma de campo eléctrico indefinidamente hasta que se consuma totalmente en forma de disipación de calor en la resistencia. Este paso de un tipo de energía a la otra es el principio básico de las ondas electromagnéticas que le permite abandonar el circuito. Una vez que la energía abandona la fuente de emisión, ésta viaja en forma independiente, aún cuando el emisor pueda haberse apagado. Este es le caso, por ejemplo, de una estrella que emitió una dada energía electromagnética, y es recibida muchos años luz más tarde por un telescopio, ignorándose si en el presente esa estrella aún existe. Los sistemas de segundo orden quedan representados por una ecuación diferencial de segundo orden, cuya solución, algo más compleja que los sistemas de primer orden, también se solucionarán como una superposición de una solución homogénea, transitoria o natural y una solución particular o de estado permanente. Primeramente analizaremos, siguiendo el mismo principio visto en los sistemas de primer orden, aquellos sistemas de 2° orden que tienen energía almacenada inicialmente. Esto nos permitirá estudiar en detalle la respuesta natural o transitoria. Posteriormente estudiaremos su excitación con un escalón, para analizar la respuesta al estado permanente. En los sistemas de 2° grado, aparecerán dos constantes que deberán ser evaluadas en el circuito a través de las condiciones iniciales. Estas constantes representan la energía almacenada inicialmente en el capacitor y en la inductancia. En estos casos observaremos en el circuito no solo el valor de la variable (corriente o tensión) para t=0 sino también su derivada. Para los circuitos excitados con una función escalón, deberá evaluarse una tercera constante que responderá al valor de la variable en el estado permanente, en estos, casos, evaluaremos al circuito para t=∞. 3.1 Excitación por energía almacenada internamente La solución natural de un sistema de segundo grado excitado inicialmente podrá tener en general varios tipos de respuestas, desde una exponencial amortiguada a una respuesta oscilatoria. Veremos estas soluciones posibles. El circuito de la figura 3.17 representa un sistema R-L-C cargado inicialmente con una corriente Io en la inductancia y una tensión Eo en el capacitor. La ecuación diferencial de 2° orden homogénea que representa la corriente del circuito es: t di 1 L + Ri + ∫ i dt = 0 dt C −∞ (3.32) derivando miembro a miembro: L UNIVERSIDAD TECNOLÓGICA NACIONAL d 2i di i +R + =0 2 dt dt C 24 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Figura 3.17 La solución natural de un sistema de 2° orden, puede suponerse como una suma de dos soluciones exponenciales de primer orden arbitrarias: t t i( t ) = A1 e p1 + A2 e p 2 (3.33) Si es solución, debe verificarse en la ecuación diferencial (3.32), para ello calculamos la derivada primera y segunda de (3.33): di = A1 p1 e p1t + A2 p2 e p 2 t dt (3.34) d 2i 2 p1t 2 p2t = A1 p1 e + A2 p2 e dt 2 Reemplazamos la solución propuesta, su primera y segunda derivada en la ecuación diferencial: 1 1 A1 e p1t ( Lp12 + Rp1 + ) + A2 e p 2 t ( Lp22 + Rp2 + ) = 0 C C p1t p2t como A1 e y A2 e no deben ser 0, entonces los paréntesis deben ser nulos. Esto puede verse como un polinomio en p de segundo grado, que tiene dos posibles raíces p1 y p2: 1 R =0 p2 + p + L LC 1 R 2 R ± ( ) − ; o también p1,2 = − (3.35) LC 2L 2L p1,2 = −α ± α 2 − ω02 donde α es una constante de amortiguación y ω0 es la frecuencia natural de oscilación del sistema. R 1 α= y ω0 = (3.36) 2L LC por lo tanto la solución natural (3.32) propuesta es una solución de la ecuación diferencial de 2° orden. En esta solución aparecen las constantes de tiempo p1 y p2, que acaban de ser evaluadas matemáticamente y dependen de las constantes R-L y C del circuito. Pero aún restan evaluar cuánto valen las constantes A1 y A2. Para evaluar estas constantes, debemos en principio usar las condiciones de contorno o iniciales calculadas arriba, es decir la variable y su derivada para t=0 y observar su valor en el circuito. UNIVERSIDAD TECNOLÓGICA NACIONAL 25 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Sin embargo si se estudia el valor de p1 y p2 en (3.35) de acuerdo al valor que adopte en cada caso la raíz cuadrada, ésta podrá ser mayor, igual o menor que cero. En este último caso se genera un número imaginario. Es por esto que según sea α respecto de ω0 serán tres las posibles soluciones, y por lo tanto distintos los valores de A1 y A2. Entonces, si α > ω0 la solución será sobreamortiguada; si α = ω0 la solución tendrá un amortiguamiento crítico y si α < ω0 la solución será subamortiguada. 3.1.1 Solución sobreamortiguada. En el caso sobreamortiguado, si α > ω0, por lo tanto p1 y p2 son raíces reales y negativas. En este caso la solución será la suma de dos exponenciales como en (3.33). t t i( t ) = A1 e p1 + A2 e p 2 donde deben definirse las constantes A1, A2 ya que p1 y p2 se explicitaron en (3.35) y (3.36). Para calcular las constantes A1 y A2 es necesario utilizar las condiciones de contorno de la variable investigada, en este caso la corriente y su derivada en t=0. De acuerdo al circuito de la figura 3.17 (a) y (b), las condiciones iniciales son: 0 1 i( 0 ) = Io; i dt = Eo C −∫∞ Entonces, para t=0 la ecuación 3.32 será: di( 0 ) + R Io − Eo = 0 L dt (3.37) di( 0 ) eL Eo − R Io = = dt L L Con lo cual queda calculado el valor de la corriente y el de su derivada para t=0. Haciendo di en las ecuaciones (3.34) y (3.35) queda: t=0, para i(t) y para dt ⎧i( 0 ) = Io = A1 + A2 ⎪ (3.38) ⎨ Eo − RIo = = + i ' ( 0 ) A p A p 1 1 2 2 ⎪⎩ L De donde pueden calcularse los valores de A1 y A2 según sean los valores de Eo, Io, R y L. Es decir, por un lado se ha observado en el circuito equivalente para t=0 los valores iniciales, y y se los compara a la solución y su derivada también para t=0. Ya que en el circuito de la figura 3.17, no hemos definidos valores numéricos, y a fin de simplificar la matemática de la solución, pero sin perder generalidad, vamos a suponer que Eo − RIo = K . En tal caso el juego de ecuaciones (3.38) queda: L ⎧i( 0 ) = Io = A1 + A2 ⎨ ⎩i' ( 0 ) = K = A1 p1 + A2 p 2 de donde despejando A1 y A2 da: Iop2 − K ; p 2 − p1 reemplazando A1 y A2 en la solución será: A1 = UNIVERSIDAD TECNOLÓGICA NACIONAL 26 A2 = K − p1 Io p 2 − p1 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I i( t ) = CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Io p 2 − K p1t K − Io p1 p2t e + e p 2 − p1 p 2 − p1 (3.39) Sistemas de segundo orden. Sobreamortiguado. 40 30 20 Corriente i(t) [A] i(t) término A1 término A2 R=7 L= 1 C = 0.1 Io= 10 Eo =5 α = 3.5 wo= 3.165 1/p1 = -0.5 1/p2= -0.2 10 -1/p1 0 0.00 0.20 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80 2.00 -10 -1/p2 -20 -30 Tiempo t Figura 3.18 En la figura 3.18 se aprecia que la respuesta transitoria o natural es la composición de dos exponenciales decrecientes de diferente constantes de tiempo (-1/p1) y (-1/p2). 3.1.2. Solución crítica La solución crítica se obtiene cuando la constante de amortiguación si α es igual a la frecuencia natural ω0. En tal caso queda que p1=p2. Desarrollando la solución propuesta en (3.39) se observa que los términos con factores K se anulan por ser idénticos los exponentes: Io p1 p2t Io p 2 p1t K K e − e p1t + e p2t − e i( t ) = p 2 − p1 p 2 − p1 p 2 − p1 p 2 − p1 i( t ) = Io p 2 p1t Io p1 p2t e − e p 2 − p1 p 2 − p1 (3.40) Sin embargo en 3.40 los denominadores se hacen cero al ser p1=p2. Para salvar esta indeterminación, vamos a suponer que p2=p1+δ, y luego haremos δ→0. La expresión (3.40) se rescribe como: p1 + δ p1 i( t ) e p1t = e p1t − e p1t e δt = ( p1 + δ − p1e δt ) Io p1 + δ − p1 p1 + δ − p1 δ UNIVERSIDAD TECNOLÓGICA NACIONAL 27 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO El exponencial eδt, lo desarrollaremos en serie como ( 1 + δt + L ), entonces p + δ − p11 + p1δt + L i( t ) e p1t = ( p1 + δ − p1 ( 1 + δt + L )) = e p1t ( 1 ) δ δ Io Haciendo tender δ→0, y recordando que para este caso p1=α, entonces la solución natural será: i( t ) = e − αt ( 1 + αt ) Io i( t ) = e −αt ( Io + Ioαt ) En general la solución crítica natural o transitoria para un circuito R-L-C será: i( t ) = e − αt ( A1 + A2 t ) (3.41) Y de acuerdo al caso particular deberá evaluarse las constantes A1 y A2 a partir de las condiciones de contorno del circuito para t=0, evaluando la variable y su derivada para t=0. En la figura 3.19 se presenta una solución crítica (R = 6.3245) (en trazo más oscuro) y se lo ha comparado con una solución sobreamortiguada (R = 12 Ω) en trazo gris, cuyo único cambio fue el de modificar el valor de R, y dejando L y C constantes. Sistemas de segundo orden. Amortiguamiento crítico 18 R = 6.33 L= 1 C = 0.1 Io= 10 Eo =-30 α = 3.165 w o= 3.165 Corriente i(t) [A] 15 i(t) sobream . i(t)crítico 12 9 6 3 0 0.0000 0.5000 1.0000 1.5000 2.0000 Tiem po t Figura 3.19 3.1.3 Solución subamortiguada Para el caso en que α < ω0 la solución natural es del tipo subamortiguada. En este caso los coeficientes p1 y p2 serán complejos conjugados, así: p1,2 = −α ± α 2 − ω02 = −α ± j ω02 − α 2 = −α ± jωd p1 = −α + jωd (3.42) p2 = −α − jωd UNIVERSIDAD TECNOLÓGICA NACIONAL 28 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO recordemos que α es la constante de amortiguamiento, ω0 es la frecuencia natural y ωd es una frecuencia amortiguada por la resistencia. 1 R 1 Siendo α = para un circuito serie, α = para un circuito paralelo, ω0 = y 2L 2 RC LC ω d = j ω 02 − α 2 . Si reemplazamos esta solución en (3.40) o (3.39) si hacemos K=0, es decir suponemos como condiciones iniciales que i(0)=Io e i’(0)=0 será: i( t ) p2 p1 − α − ωd − αt jω d t − α + ωd − αt − jω d t e p1t − e p2t = e e e e = − Io p2 − p1 p2 − p1 − 2 jωd − 2 j ωd [( ) )] ( i( t ) e − αt = α e j ω d t − e − j ω d t + j ωd e j ω d t + e − j ω d t 2 j ωd Io Usando las siguientes igualdades trigonométricas: e jθ + e − jθ e jθ − e − jθ cos θ = ; sin θ = 2 2j y reemplazando en la expresión anterior: ⎞ ⎛ α i( t ) sin ωd t + cos ωd t ⎟⎟ = e − αt ⎜⎜ Io ⎠ ⎝ ωd (3.43) Otra forma de expresar esta solución es tener en cuenta que: α = ω0 sin θ; ωd = ω0 cos θ la expresión (3.43) puede rescribirse como: i( t ) ω0 − αt = e (cos ωd t cos θ + sin ωd t sin θ) Io ωd (3.44) ω i( t ) = Io 0 e − αt (cos ωd t cos θ + sin ωd t sin θ) ωd 1 Sistemas de segundo orden. Subamortiguado. 2 exp Corriente i(t) [A] 12 (1) R = 2.5 L= 1 C = 0.1 Io= 10 Eo =30 α = 1.25 w o= 3.16 w d= 2.9 8 4 0 -4 -8 0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 (2) R = 1.0 L= 1 C = 0.1 Io= 10 Eo =30 α = 0.5 w o= 3.16 w d= 3.12 4.00 Tiempo t Figura 3.20 UNIVERSIDAD TECNOLÓGICA NACIONAL 29 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Esta expresión puede generalizarse para cualquier condición inicial haciendo: (3.45) i( t ) = e − αt ( A1 cos ωd t + A2 sin ωd t ) En forma análoga a lo visto en (3.31) la expresión (3.44) puede ponerse la suma de un coseno más un seno de la misma frecuencia, puede ponerse como un coseno y una fase: ω i( t ) = Io 0 e −αt cos(ω d t − θ) (3.46) ωd En la figura 3.20 se aprecian dos casos de solución subamortiguada. Nótese que el caso (1), representado con trazo negro, la R=2.5 Ω; en cambio en el caso (2), línea gris gruesa, se ha disminuido la resistencia a 1Ω. A medida que disminuye la amortiguación, al disminuir R, la amplitud de las oscilaciones aumenta, y cortando al eje del tiempo antes que en el caso anterior. Con trazo fino gris se ha representado la exponencial e-αt que amortigua la señal senoidal y cosenoidal. 3.2 Respuesta a una excitación impulsiva 3.2.1 Circuito R-L-C serie Al igual que en los circuitos de primer orden, una forma de cargar inicialmente los elementos almacenadores de energía es aplicar un impulso al circuito de 2° orden. Una vez cargado, la respuesta natural será la misma que ya se vió en el apartado anterior. Es decir, de acuerdo a los valores de las constantes α y ω0, se obtendrá algunas de las tres respuestas analizadas. La única diferencia estriba en el desconocimiento del valor adquirido de corriente inicial en la inductancia y /o la tensión inicial en el capacitor. Figura 3.21 UNIVERSIDAD TECNOLÓGICA NACIONAL 30 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Al igual que lo visto en el punto 2.2.1, para t=0-, el circuito está en reposo, para t=0 el impulso está activo y la inductancia se abre y toda la tensión del impulso recae sobre ésta. Para t=0+ el impulso desaparece, y la inductancia queda cargada inicialmente. La corriente inicial en la inductancia será (ver figura 3.9 y Ec. 3.14) i( 0+ ) = 0+ 1 1 u0 ( t )dt = ∫ L 0− L Para t=0, la tensión en la resistencia y la inductancia serán: eR = i( 0 )R = R R ; eL = − ; eC = 0 L L La derivada de la corriente i’(0) será: di( 0+ ) eL ( 0+ ) R i′( 0 ) = = =− 2 dt L L Una vez que se conocen las condiciones de contorno i(0) e i´(0), se pueden calcular las constantes A1 y A2, según sea el caso sobreamortiguado, crítico o subamortiguado. Si el impulso de tensión aplicado no es unitario y tiene un área A0, entonces las soluciones serán: a) Sobreamortiguado: A0 i( t ) = p1e p1t − p2e p 2 t ; para t > 0 2 2 2 L α − ω0 ( ) b) Críticamente amortiguado A i( t ) = 0 e αt (1 − αt ); para t > 0 L c) Subamortiguado ω Aω i( t ) = 0 0 e − αt cos (ωd t − θ ); θ = cos −1 d ; para t > 0 L ωd ω0 3.2.2 Circuito R-L-C paralelo En forma análoga podemos analizar cuál será las condiciones iniciales de carga ante un impulso de corriente en un circuito R-L-C paralelo (ver figura 3.22). La ecuación diferencial se puede escribir aplicando tensiones nodales: t e 1 de + ∫ e dt + C = u0 ( t ) R L −∞ dt (3.47) Para t<0, el impulso no está presente, entonces podemos igualar a cero la ecuación diferencial. Si derivamos ambos miembros queda: UNIVERSIDAD TECNOLÓGICA NACIONAL 31 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO d 2 e 1 de e C + + = 0 dividiendo todo por C dt R dt L d 2e 1 de 1 e=0 + + dt RC dt LC d 2e de 1 1 ; ω0 = + 2α + ω 02 e = 0; α = dt dt 2 RC LC (3.48) Figura 3.22 Puesta de esta forma la ecuación diferencial de tensión, tendrá el mismo tipo de respuesta que las vistas anteriormente para la corriente en un circuito serie, sólo que el valor de α es distinto. Siendo las respuestas para los tres casos, sobreamortiguado, crítico o subamortiguado, quedan calcular sus constantes A1 y A2, para lo cual debemos determinar las condiciones de contorno e(0) y e´(0). Para t=0 el impulso de corriente queda aplicado sobre el circuito, la inductancia se abre, pero el capacitor es un corto, por lo tanto toda la corriente circula por la capacidad. La tensión en C será: eC ( 0 + ) = 0+ 1 1 u 0 ( t )dt = ∫ C 0− C La corriente en las ramas de la R y L serán: 1 1 e( 0 + ) iR = = ; iC = − ; iL = 0 R RC RC Finalmente la derivada de la tensión en t=0 será: de( 0+ ) iC ( 0+ ) 1 ′ e(0) = = =− dt C RC 2 Con las condiciones de contorno conocidas pueden calcularse las constates A1 y A2, de acuerdo a como sea α y ω0. Si el impulso de corriente tiene un área A0, se podrá obtendrá algunas de las tres respuestas siguientes: UNIVERSIDAD TECNOLÓGICA NACIONAL 32 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO a) Sobreamortiguado: A0 e( t ) = p1e p1t − p 2 e p2t ; para t > 0 2 2 2C α − ω0 b) Críticamente amortiguado A e( t ) = 0 e αt (1 − αt ); para t > 0 C c) Subamortiguado Aω ω e( t ) = 0 0 e −αt sin(ω d t − θ); θ = cos −1 d ; para t > 0 Cω d ω0 ( ) 3.3 Respuesta a una función escalón La respuesta de un sistema de segundo orden excitado por una función escalón, consiste en la superposición de dos respuestas, una que corresponde al transitorio, y la otra para el estado permanente. Como ya se ha referido en otras oportunidades, para obtener la respuesta general, debemos evaluar las constantes usando las condiciones iniciales (o de contorno) del circuito. 3.3.1 Circuito R-L-C serie Supongamos el circuito serie de la figura 3.23, y se desea obtener la tensión en el capacitor. Una forma de resolver este problema es primero calcular la corriente del circuito serie. Figura 3.23 UNIVERSIDAD TECNOLÓGICA NACIONAL 33 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO La ecuación diferencial de un circuito serie será: e L + e R + eC = Eu −1( t ) t L , di 1 + Ri + i dt = E u −1( t ) dt C −∞ (3.49) ∫ y luego obtener la tensión haciendo eC = 1 C t ∫ i dt −∞ Sin embargo, otra forma es reemplazar la corriente del capacitor iC en la ecuación diferencial: iC = C de dt La ecuación diferencial de la tensión en los bornes del capacitor será: LC de e d 2e + RC + = E u −1( t ) , dt C dt (3.50) La expresión (3.50) es también una ecuación diferencial de segundo orden, que puede ser resuelta según las formas expresadas en los puntos anteriores. Las condiciones iniciales (t=0) serán la tensión en el capacitor y su derivada. Si el capacitor esta descargado, entonces éstas serán: e( 0 ) = 0 de( 0+ ) iC ( 0+ ) e′( 0 ) = = =0 dt C La condición a estado permanente para t=∞ , en el circuito de la figura será e(∞ ) = E Así, para determinar que tipo de respuesta será, debemos evaluar α y ω0. 1 R para un circuito serie, ω0 = y ω d = j ω 02 − α 2 . 2L LC Una vez determinadas las condiciones de contorno, se elige el tipo de solución de la ecuación diferencial y luego se buscan los valores de las constantes A1, A2 y B. En este caso, al buscar la tensión e del capacitor será: Siendo α = a) Sobreamortiguado: e( t ) = A1e p1t + A2e p 2 t + B b) Amortiguamiento crítico e( t ) = e − αt ( A1 + A2t ) + B c) Subamortiguado e( t ) = e − αt ( A1 sin ωd t + A2 cos ωd t ) + B e( t ) = Ae− αt [cos( ωd t + θ )] + B donde B = e( ∞ ) Supongamos que en el circuito de la figura 3.23, sea R=1, L=1 y C=1, E=10. Entonces 1 3 α = ; ω0 = 1; ω d = ω02 − α 2 = = 0.866; e( ∞ ) = 10 2 2 UNIVERSIDAD TECNOLÓGICA NACIONAL 34 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Por lo tanto la solución es de tipo subamortiguada, siendo su solución: e( t ) = e − t / 2 ( A1 sin 0.866 t + A2 cos 0.866 t ) + 10 Aplicando las condiciones de contorno, y derivando la solución para t=0 queda: 1 de( t ) = e −t / 2 ( 0.866 A1 cos 0.866 t − A2 0.866 sin 0.866 t ) − e −t / 2 ( A1 sin 0.866 t + A2 cos 0.866 t ) 2 dt e( 0 ) = 0 = A2 + 10 ⎧ ⎧ A = −5.77 ; de allí queda que ⎨ 1 ⎨ ⎩e' ( 0 ) = 0 = 0.866 A1 − 0.5 A2 ⎩ A2 = −10 Por lo tanto la solución final será; e( t ) = 10 − e − t / 2 ( 5.77 sin 0.866 t + 10 cos 0.866 t ) Si en vez de la tensión se hubiese calculado la corriente, deberemos resolver i(t) en el juego de ecuaciones (3.49), pero deben cambiarse las condiciones iniciales e(0), e´(0) y e(∞), por i(0), i´(0) y i(∞). En este caso la solución general para la corriente sería: a) Sobreamortiguado: E i( t ) = e p1t − e p2t ; para t > 0 2 2 2L α − ω0 b) Críticamente amortiguado E i( t ) = te αt ; para t > 0 L c) Subamortiguado E − αt i( t ) = e sin(ω d t ); para t > 0 Lω d ( ) 3.3.2 Circuito R-L-C paralelo Para un circuito R-L-C paralelo (ver figura 3.24). La ecuación diferencial se puede escribir aplicando tensiones nodales: t e 1 de + ∫ e dt + C = E u −1 ( t ) R L −∞ dt (3.51) El tipo de solución a la tensión del paralelo dependerá de las relaciones entre las constantes α y ω0 y usando las condiciones de contorno, se calculan las constantes A1, A2 y B. Las soluciones generales son a) Sobreamortiguado: e( t ) = A1e p1t + A2e p 2 t + B b) Amortiguamiento crítico e( t ) = e − αt ( A1 + A2t ) + B UNIVERSIDAD TECNOLÓGICA NACIONAL 35 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO c) Subamortiguado e( t ) = e − αt ( A1 sin ωd t + A2 cos ωd t ) + B e( t ) = Ae− αt [cos( ωd t + θ )] + B 1 1 donde B = e( ∞ ) , y siendo α = para un circuito serie, ω0 = y ω d = j ω 02 − α 2 . 2 RC LC Como se puede ver las ecuaciones son idénticas al del circuito serie, sólo que cambian las condiciones particulares. Figura 3.24 Si aplicamos un generador de corriente I, como en la figura, estas soluciones se convierten en: a) Sobreamortiguado: I e( t ) = e p1t − e p2t ; para t > 0 2 2 2C α − ω 0 ( ) b) Críticamente amortiguado I e( t ) = te αt ; para t > 0 C c) Subamortiguado I e( t ) = e −αt sin (ω d t ) para t > 0 Cω d UNIVERSIDAD TECNOLÓGICA NACIONAL 36 FACULTAD REGIONAL MENDOZA TEORÍA DE LOS CIRCUITOS I CAPÍTULO 3 REV. 29/4/08 S. ENRIQUE PULIAFITO Supongamos, por ejemplo, que se desea calcular la corriente en la inductancia, con los siguientes valores: R=1, L=1 y C=1, I=10. Entonces 1 3 α = ; ω0 = 1; ωd = ω02 − α 2 = = 0.866; i( ∞ ) = 10 2 2 Por lo tanto la solución es de tipo subamortiguada, siendo su solución: i( t ) = e − t / 2 ( A1 cos 0.866 t + A2 sin 0.866 t ) + 10 Aplicando las condiciones de contorno, y derivando la solución para t=0 queda: 1 di( t ) = e − t / 2 ( −0.866 A1 sin 0.866 t + A2 0.866 cos 0.866 t ) − e − t / 2 ( A1 cos 0.866 t + A2 sin 0.866 t ) 2 dt i( 0 ) = 0 = A1 + 10 ⎧ ⎧ A1 = −10 ⎪ ⎨i' ( 0 ) = eL = 0 = 0.866 A − 0.5 A ; de allí queda que ⎨ 2 1 ⎩ A2 = −5.77 ⎪⎩ L Por lo tanto la solución final será; i( t ) = 10 − e − t / 2 ( 10 cos 0.866 t + 5.77 sin 0.866 t ) UNIVERSIDAD TECNOLÓGICA NACIONAL 37 FACULTAD REGIONAL MENDOZA