comunicación de datos - Universidad Nacional de Quilmes
Anuncio

DEPARTAMENTO DE CIENCIA Y TECNOLOGÍA
UNIVERSIDAD NACIONAL DE QUILMES
Roque Sáenz Peña 352 – (B1876BXD) Bernal – Buenos Aires – Argentina
COMUNICACIÓN DE DATOS
CODIFICACIÓN DE CANAL
La codificación de canal es la transformación intencional que se le hace a una señal de
comunicación a fin de tener una mejor performance frente a efectos adversos que produce el
ruido presente en el canal de comunicación. Normalmente la meta que se persigue al hacer
una codificación de canal es reducir la probabilidad de error de bit PB1 o bien reducir la
exigencia de relación Eb/N0 requerida para la transmisión de la señal. Normalmente, esta
mejora se hace a expensas de un incremento del ancho de banda utilizado2.
La codificación de canal puede dividirse en dos áreas. Una trata con el diseño de una
forma de onda adecuada y la otra con el diseño de una estructura de bits adecuada. La
codificación o diseño de forma de onda consiste en generar la mejor forma de onda posible,
para el canal de comunicación considerado, para que el proceso de detección que se lleva a
cabo en el receptor sea lo menos sensible posible al ruido y de esta manera reducir la
probabilidad de error de bit. Es aquí donde surgen esquemas de modulación tales como PSK,
FSK, QAM o codificaciones en banda base tales como unipolar, bipolar, Manchester y otros.
Este estudio se deja para la materia Teoría de las Telecomunicaciones. En Comunicación de
Datos estudiaremos las secuencias estructuradas.
El diseño de secuencias estructuradas consiste en la transformación de la secuencia
original de datos en una secuencia “mejor” mediante el agregado de bits redundantes. Estos
bits redundantes se usan para la detección y/o corrección de errores. Ya sea en la codificación
de la forma de onda o en la codificación estructurada, la probabilidad de error de bit buscada
como objetivo de diseño dependerá de cada aplicación en particular. En algún caso una
probabilidad de error de bit PB = 10-2 podrá ser más que suficiente, mientras que en otro caso
quizás se requiera una PB de 10-9. Obviamente, como en todo diseño de ingeniería, cuando uno
pretende un mejor desempeño del sistema debe pagarlo con algún costo extra, por lo tanto se
trata de buscar la mejor relación costo-beneficio.
En el tratamiento de la codificación de canal siempre aparece el concepto de distancia
entre símbolos. La distancia entre símbolos (o señales) da una idea de qué tan diferentes son
dos señales, por ejemplo, una para representar al cero binario y otra para representar al uno
binario. Intuitivamente se puede entender que cuanto más diferentes (o sea, más distantes)
son dos señales, menos probabilidad tienen de confundirse una con otra cuando el ruido las
afecta. Como se verá más adelante, en la codificación estructurada el concepto de distancia
también está presente.
Antes de entrar de lleno al tema de codificación, vamos a ver algunos conceptos
introductorios.
1
El término error de bit se refiere a la equivocación que comete el detector en el receptor cuando, a causa del ruido
eléctrico, confunde un “1” binario con un “0” binario o viceversa. Dado que el ruido es un fenómeno aleatorio que se
representa mediante variables estadísticas, no se puede saber de antemano cuántos y cuáles bits serán detectados
erróneamente y entonces se habla de probabilidad de error de bit. Cuando se dice, por ejemplo, probabilidad de error
de bit de 10-6 significa que se espera que en promedio, de cada 1 millón de bits transmitidos, uno será detectado
erróneamente.
2
El ancho de banda es el espectro de frecuencia que ocupa una determinada señal eléctrica a través del canal de
comunicación. Para el caso de señalización binaria hay que recordar que cuando más corta es la duración de un bit,
mayor es el espectro ocupado (mayor ancho de banda).
Codificación de canal
1
Canal simétrico binario
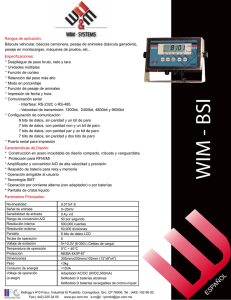
El concepto de canal simétrico binario (CSB) tiene gran importancia práctica. Se trata
de un canal que presenta dos símbolos de entrada, x0 = 0, x1 = 1, que ocurren con igual
probabilidad, y dos símbolos de salida, y0 = 0, y1 = 1. Los símbolos de salida yi representan a
los símbolos de entrada que han sido afectados por el ruido. El canal se dice que es simétrico
porque la probabilidad de recibir un 1 habiéndose transmitido un 0 es igual a la probabilidad de
recibir un 0 habiéndose transmitido un 1. Esta probabilidad condicional se denota con la letra p
y se llama probabilidad de transición del canal. La Figura 1 muestra un diagrama que
representa un modelo de canal simétrico binario. Nótese que si la probabilidad de recibir
erróneamente un bit es p, entonces obviamente, la probabilidad de recibirlo correctamente es
1 – p.
Figura 1. Canal simétrico binario.
En la Figura 1 se ve que habiéndose transmitido un 0 a la entrada del canal, como
consecuencia del ruido existe una probabilidad p de recibir un 1 a la salida del mismo.
Similarmente ocurre para un 1 binario a la entrada. Si p = 0 entonces los símbolos de entrada
siempre se recibirán correctamente a la salida.
Capacidad de canal
Sobre esta idea y varias consideraciones teóricas que están fuera de los alcances de la
materia, Shannon (¡Cuando no!) desarrolló los temas referentes a capacidad de canal, por allá
por el año 1948. Esto es, cuánta información es posible transmitir por un canal simétrico
binario cuando a la entrada del mismo se tiene una fuente con una cierta entropía H(S). La
base de los estudios de Shannon estaba en analizar la entropía de la fuente a partir de la
observación de los elementos a la salida del CSB. La capacidad de canal da cuenta de la
cantidad de información que es posible transmitir a través de un CSB. Para no entrar en
detalles teóricos profundos simplemente diremos que la capacidad de un canal se representa
por la letra C y se expresa en bits3.
Considerando un canal simétrico binario, las características del mismo quedan
determinadas únicamente por la probabilidad de transición p. Se puede demostrar que para
este tipo de canal la capacidad de canal C viene dada por:
C = 1 + p ⋅ log2 p + (1 − p) ⋅ log2 (1 − p)
(1)
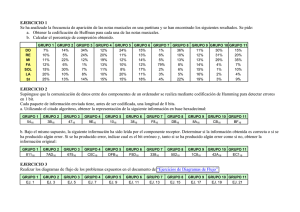
La ecuación (1) se muestra graficada en la Figura 2. De allí se puede determinar que:
3
Shannon hizo un estudio más generalizado y no se refirió solamente al canal simétrico binario sino que determinó la
capacidad de canal para un canal de J entradas y K salidas al que denominó canal discreto sin memoria.
2
Codificación de canal
1. Cuando el canal no presenta ruido resulta ser p = 0 y la capacidad es máxima e
igual a 1. Obviamente que es 1, ya que a la entrada del canal se encuentra una fuente discreta
binaria equiprobable, en cuyo caso la entropía H(S) es 1. Por lo tanto, al no haber ruido, esa
es la máxima cantidad de información que puedo transmitir sobre el canal.
2. Cuando el canal comienza a hacerse ruidoso la capacidad del mismo para transmitir
información comienza a disminuir. El caso extremo ocurre cuando p = 0,5 y en tal caso la
capacidad del canal se hace 0. Esto suena lógico ya que siendo p = 0,5 la probabilidad de error
es tal que, a la salida del canal da lo mismo arrojar una moneda al aire y optar por “1” si salió
cara u optar por “0” si salió ceca. Es decir, no importa la fuente de información que se tenga a
la entrada del canal ante una situación así.
Figura 2. Variación de la capacidad de un canal simétrico binario en
función de la probabilidad de transición.
Teorema de la capacidad del canal
La presencia inevitable del ruido en un canal de comunicación hace que se produzca
una discrepancia entre la secuencia de datos transmitida y la secuencia recibida. Al usar
codificación de canal se está aumentando la resistencia al ruido del sistema digital de
comunicaciones. La codificación basada en estructuras de bits consiste en un mapeo de la
secuencia de datos que sale de la fuente en otra secuencia que ingresa al canal de
comunicación, realizándose la operación inversa a la salida del canal, de manera que el efecto
total del ruido sobre el canal sea minimizado. Esta operación de mapeo se realiza por medio de
un codificador en el lado del transmisor, mientras que la operación inversa del lado del
receptor se realiza por medio de un decodificador. La Figura 3 describe este proceso en forma
de diagrama de bloques.
Los bits de información van saliendo de la fuente de información y el trabajo del
codificador es agregar redundancia de una manera preestablecida a los bits de información, y
explotar esta redundancia en el decodificador para reconstruir la señal de la manera más fiel
Codificación de canal
3
posible. La codificación de canal pareciera que echa a perder el trabajo realizado durante la
codificación de fuente en la que el objetivo era eliminar bits redundantes. Sin embargo, las dos
operaciones se complementan. Con la codificación de fuente lo que se busca es
aumentar la eficiencia del sistema, mientras que con la codificación de canal se busca
aumentar la confiabilidad del sistema.
Fuente
discreta sin
memoria
Codificador
de canal
Canal
discreto sin
memoria
Decodificador
de canal
Destino
Ruido
Figura 3. Diagrama en bloques simplificado de un sistema de comunicación digital.
Normalmente, y luego lo veremos en detalle, el trabajo del codificador es convertir una
secuencia de k bits de mensaje en una secuencia mayor de n bits, siendo en consecuencia
n > k. Por lo tanto, el número de bits redundantes agregados a la secuencia de bits de
mensaje es n – k. La relación entre k y n se llama tasa de código y se la designa por r:
r =
k
n
(2)
siendo r menor que 1.
La pregunta que surge es: ¿se puede construir un esquema de codificación tal que la
probabilidad de error de bit de un mensaje sea todo lo pequeña que uno desee? La respuesta a
esta pregunta es sí, siempre que se cumplan ciertas condiciones. Esta respuesta afirmativa la
dio Shannon.
Supóngase que un canal discreto sin memoria tiene una entropía H(S) bits por símbolo
de fuente. Supongamos que la fuente transmite un símbolo binario cada Ts segundos. Por lo
tanto, la tasa de información es H(S)/Ts bits por segundo. El codificador entrega símbolos
codificados (más grandes, de longitud n) también cada Ts segundos. Por otra parte, el canal al
que van ingresando los paquetes codificados tiene una capacidad de C bits. Como el
codificador ha agregado bits al mensaje original pero la duración del símbolo binario se debe
mantener igual, resulta que cada bit que conforma el paquete codificado es ahora más
pequeño, digamos de duración TC. Por lo tanto, al canal ingresa un bit cada TC segundos.
Teniendo todo esto en mente podemos enunciar el teorema de Shannon de capacidad del
canal, para un canal discreto sin memoria:
1. Sea una fuente discreta sin memoria, S, que tiene una entropía H(S) y produce
símbolos cada TS segundos. Sea un canal discreto sin memoria con capacidad C al que ingresa
un bit cada TC segundos. Entonces, si
H(S)
C
≤
TS
TC
(3)
entonces existe un esquema de codificación tal para el cual cada símbolo de la fuente puede
ser transmitido sobre el canal y puede ser reconstruido con una probabilidad de error
arbitrariamente baja.
2. Inversamente, si
4
Codificación de canal
H(S)
C
>
TS
TC
entonces no es posible transmitir información sobre el canal y reconstruirla con una
probabilidad de error arbitrariamente pequeña.
Este es uno de los resultados más importantes de la teoría de la información. Nótese
que este teorema establece límites, sin embargo no dice nada acerca de cómo debe ser el
esquema de codificación que los haga cumplir. El esquema quizás sea extremadamente
complicado o muy difícil de implementar, pero ese es otro tema. El teorema sólo garantiza la
existencia de ese código.
Consideremos una fuente discreta sin memoria que emite símbolos binarios igualmente
probables (ceros y unos) una vez cada TS segundos. Ya que la entropía de esta fuente es de 1
bit por símbolo, la tasa de información resulta ser 1/TS bits por segundo. La secuencia de
salida de la fuente ingresa a un codificador de canal con tasa de código r = k/n. El codificador
entrega al canal un bit cada TC segundos. Por lo tanto, la capacidad del canal por unidad de
tiempo es C/TC bits por segundo, donde C queda determinado por la probabilidad de transición
del canal, p. Por lo tanto, de acuerdo a la primera parte del Teorema de Shannon, si se cumple
1
C
≤
TS
TC
(4)
entonces la probabilidad de error puede hacerse arbitrariamente pequeña usando algún
esquema de codificación apropiado. Ya que TC/TS es la tasa de código
r =
TC
TS
entonces la (4) se puede rescribir como
r ≤C
(5)
Es decir que, si la tasa de código r del esquema de codificación es menor o igual a la
capacidad del canal entonces la probabilidad de error se puede hacer arbitrariamente pequeña.
Ejemplo.
Consideremos un CSB con una probabilidad de transición p = 10-2. Para este valor, la
capacidad del canal es C = 0,9192, usando la ecuación (1). Por lo tanto, siempre que r sea
menor o igual que C, es posible hallar un n y un k apropiados que me permitan recibir los
mensajes codificados con una tasa de error tan pequeña como se desee.
Atención. Tiene que quedar en claro esto de n y k apropiados. Por ejemplo, si r = ½
estoy cumpliendo con la (5) y por lo tanto puedo hacer que la probabilidad de error del
mensaje recibido sea tan pequeña como yo desee, digamos 10-50, si se me antoja. Esto NO
necesariamente significa que usando k = 1 y n = 2 (o sea, r = ½) voy a llegar a ese objetivo.
Quizás tenga que utilizar k = 4 y n = 8. O quizás k = 1024 y n = 2048. O peor aún, quizás
esté toda la vida buscando cuánto deben valer k y n y nunca logre hallar el esquema de
codificación. O también puede ocurrir que sí lo descubra pero hay que implementarlo con una
máquina infernal. O puede ocurrir que r justamente no puede ser ½ sino otra fracción. El
Teorema de Shannon de codificación del canal asegura que tal código existe. De ahí a que lo
pueda implementar...es toda una cuestión de ingenio, mucho ingenio.
Codificación de canal
5
Volviendo al enunciado de este ejemplo, nos planteamos un código llamado código de
repetición que consiste en enviar varias veces el mismo bit de mensaje. Cada bit (1 ó 0) se
envía n veces, siendo n = 2m +1 un entero impar. Por ejemplo, si n vale 3 entonces cada
símbolo se transmite como 111 ó 000. El decodificador opera “por mayoría de votos”. Si la
mayoría bits recibidos es 0 decide que el símbolo transmitido fue 0. Caso contrario decide por
el 1.
Con este esquema, un error, es decir, una detección incorrecta, puede ocurrir siempre
que se reciban m+1 ó más bits incorrectos. Para n = 3 la detección será incorrecta cuando se
reciban 2 ó 3 bits incorrectos de un mismo bloque. La probabilidad Pe de recibir
incorrectamente un símbolo codificado, es
n
Pe =
n
⋅ p i ⋅ (1 − p )n − i
i
i = m +1
∑
(6)
Los resultados de la (6) se agrupan en la tabla siguiente, para distintos valores de n.
Tasa de código Probabilidad de error
r = 1/n
Pe (Para p = 0,01)
1
10-2
1/3
3 x 10-4
1/5
10-6
1/7
4 x 10-7
1/9
10-8
1/11
5 x 10-10
Nótese que a medida que se achica r se hace más pequeña la probabilidad de error de
símbolo. Planteándose por ejemplo, un objetivo de Pe = 10-8, si bien con r = 1/3 se cumple la
(5), la Pe no queda satisfecha. Esto significa que debo buscar otros valores de k y n que me
den 1/3. Sin embargo, el objetivo sí se cumple para r = 1/9 ó más chico.
Tipos de control de error
Antes de entrar en detalle con los códigos redundantes veamos las dos maneras básicas
en la que tal redundancia es explotada para el control de errores. Una de estas maneras se
llama detección de error y retransmisión. Como su nombre lo indica, en este caso no hay
corrección de error sino solamente detección. El receptor detecta el error valiéndose de los
bits de redundancia pero no lo corrige, simplemente solicita al transmisor que vuelva a
transmitir el dato. Nótese que en este caso se requiere una comunicación de dos vías para que
puedan dialogar el transmisor y el receptor.
El segundo tipo de control de error es el control de error hacia adelante (FEC, forward
error control), o control de error anticipativo. Requiere comunicación de una sola vía y en este
caso los bits de redundancia se usan para la detección y posterior corrección de errores. Sin
embargo, como veremos más adelante, no es posible corregir todos los patrones de error o
situaciones de error posibles. Si así fuera estaríamos en el caso PB = 0 que nunca se puede
alcanzar en la práctica.
Respecto a la comunicación de una o dos vías que se menciona antes, podemos decir
que la comunicación entre dos terminales se puede clasificar de tres maneras. Supóngase dos
terminales A y B. Se dice que la comunicación entre ambas es simplex cuando sólo puede
realizarse en un sentido (por ejemplo desde A hacia B pero no desde B hacia A). La
comunicación se dice que es half-duplex (o semiduplex) cuando se puede realizar en ambos
sentidos pero no simultáneamente (por ejemplo un par de walkies talkies). Y finalmente la
comunicación es full duplex cuando se puede realizar en ambos sentidos y simultáneamente.
6
Codificación de canal
Solicitud de repetición automática (Automatic Repeat Request)
Cuando el control de errores consiste en la detección del error solamente, el sistema de
comunicaciones necesita disponer de un modo de alertar al transmisor de que un error se ha
detectado y que se necesita una retransmisión. Este procedimiento se lo conoce como solicitud
de repetición automática (ARQ, Automatic Repeat Request). En la Figura 4 se ven tres de los
mecanismos más conocidos del procedimiento ARQ. En cada diagrama la escala de tiempos
crece de izquierda a derecha. En el primer procedimiento, llamado stop and wait (parar y
esperar), el transmisor espera de parte del receptor un mensaje de acknowledgment (ACK) o
mensaje de confirmación después de cada transmisión, para saber si sigue con la siguiente
transmisión. Si ocurre un error en el receptor, éste envía un acknowledgment negativo (NAK)
al transmisor y éste retransmite el bloque de datos afectado antes de seguir transmitiendo con
el bloque que correspondía en la secuencia. En este mecanismo es suficiente una comunicación
half duplex ya que la comunicación es en ambos sentidos pero no simultáneamente.
Figura 4. Esquemas ARQ. (a) Stop and wait (parar y esperar). Es half duplex. (b) ARQ continuo con
pullback (full duplex). (c) ARQ continuo con repetición selectiva (full duplex).
El segundo mecanismo de ARQ se llama ARQ continuo con pullback. En este caso se
requiere una comunicación full duplex. Ambas terminales están transmitiendo
simultáneamente. El transmisor envía datos y el receptor envía mensajes de acknowledgment.
Véase en la Figura 4(b) que se le ha asignado una secuencia de números a los bloques de
datos. Los mensajes ACK y NAK necesitan usar a tales números como referencia para que el
transmisor sepa a qué bloque de datos corresponde el ACK o NAK que envió el receptor. En el
ejemplo (b) de la Figura 4 se muestra un retardo fijo de 4 bloques entre el mensaje
Codificación de canal
7
transmitido y el acknowledgment recibido simultáneamente. Por ejemplo, cuando se está
transmitiendo el bloque de mensaje 8, simultáneamente se está recibiendo un NAK que
corresponde al mensaje 4. En este tipo de mecanismo ARQ, cuando el transmisor recibe un
NAK vuelve hacia atrás hasta el bloque de datos erróneo y comienza a transmitir la secuencia
de nuevo desde allí.
El último tipo de mecanismo ARQ que se muestra en la Figura se llama ARQ continuo
con repetición selectiva. Al igual que en el segundo caso se utiliza un canal full duplex pero
aquí, cuando el transmisor recibe un NAK retransmite solamente el bloque de datos que ha
sido erróneo y luego continúa con la secuencia normalmente (nótese cómo el bloque 4 fue
intercalado entre los bloques 8 y 9).
La elección de algunos de estos mecanismos ARQ depende de la eficiencia buscada y de
la posibilidad o no de usar un canal full duplex. El canal half duplex del ejemplo (a) es menos
costoso que el canal full duplex, sin embargo, la ineficiencia asociada a este mecanismo se
puede ver en los time slots en blanco que hay entre cada bloque. Como contraparte, en los
ejemplos (b) y (c) se ve una mejor eficiencia en la comunicación (no se desperdician time
slots) pero un canal full duplex es más costoso.
La diferencia fundamental entre ARQ y la corrección de error hacia delante (FEC) es que
el primero consiste simplemente en una detección de error y el hardware asociado es más
sencillo y se requiere mucho menos redundancia que en el caso de FEC. Sin embargo, el FEC
es más conveniente en los siguientes casos:
1. No se dispone una comunicación desde el receptor hacia el transmisor o bien el
retardo que introduciría un ARQ es muy grande.
2. El número de errores esperados es bastante grande y se requieren excesivas
retransmisiones.
Secuencias estructuradas
Como se dijo anteriormente una de las áreas pertenecientes a la codificación de canal
consiste en agregar bits de redundancia a los bits de datos de manera tal que puedan ayudar a
detectar y/o corregir errores cuando éstos se producen como consecuencia del ruido que
afecta al canal de comunicación. Estos procedimientos son clasificados como secuencias
estructuradas ya que representan métodos de inserción de redundancia en forma estructurada
en una fuente de datos de manera tal que se pueda detectar o corregir la presencia de errores.
Estas secuencias estructuradas se dividen en dos grupos: códigos de bloque y códigos
convolucionales. Primeramente trataremos con los códigos de bloque.
Tasa de código y redundancia
En el caso de los códigos de bloque, la fuente de datos es segmentada en bloques de k
bits de datos, llamados también bits de información o bits de mensaje. Cada bloque puede
representar un mensaje de un total de 2k mensajes diferentes. El codificador transforma este
grupo de k bits en un grupo o bloque más grande de n bits de longitud, llamados bits de
código o símbolos de canal. A este bloque resultante también se lo llama palabra de código o
codeword en Inglés. Los (n – k) bits que el codificador le agrega al bloque inicial de k bits se
llaman bits de redundancia, bits de paridad o bits de verificación. Estos bits de redundancia
no llevan información. Este nuevo bloque que se ha formado mediante el codificador se lo
identifica como código (n, k). El cociente entre la cantidad de bits redundantes y la cantidad de
bits de datos, (n – k)/k, se llama redundancia del código, y la relación entre la cantidad de bits
de datos y la cantidad total de bits, k/n se llama tasa de código, como ya se dijo antes.
El agregado de redundancia a los bits de mensaje produce un aumento del ancho de
banda requerido para la transmisión. Por ejemplo, una técnica de control de error que usa una
8
Codificación de canal
tasa de código de ½ (es decir, 100% de redundancia) va a necesitar el doble de ancho de
banda que para el caso en que no esté codificado. Esto es intuitivamente claro, ya que se
deben transmitir el doble de bits en el mismo tiempo y por lo tanto el tiempo Tb de cada bit se
reduce a la mitad, duplicándose el ancho de banda. Como otro ejemplo, si se usa un esquema
de codificación cuya tasa de código sea ¾, es decir 33% de redundancia, el ancho de banda
aumenta en un factor de 4/3.
Códigos de verificación de paridad simple
Un código con bit de paridad simple es una construcción que se hace agregando un solo
bit de redundancia (bit de paridad) a un grupo o bloque de bits de datos. Este bit de paridad
toma el valor 1 ó 0, según sea, para forzar a que la suma de todos los bits del código
(incluyendo el bit de paridad) sea par o impar (según la regla que se haya adoptado). La
operación de suma se hace en aritmética de módulo 2 (es decir, es una operación lógica OR
exclusiva). Para verlo de otro modo, decimos que se agrega un bit de paridad de tal manera
que la cantidad de “unos” en el bloque siempre sea par o siempre sea impar, según la
convención que se haya establecido de antemano. Para el primer caso el método se llama
codificación con bit de paridad par y en el segundo caso codificación con bit de paridad impar.
Nótese que si la codificación es según bit de paridad par entonces la suma en módulo 2 de
todos los bits siempre da 0. Para el caso de bit de paridad impar la suma siempre da 1. En la
Figura 5 se muestra un ejemplo de código de paridad par.
Figura 5. Ejemplo de código de paridad par.
Una vez que el bloque llega al receptor se debe realizar la decodificación y determinar si
se ha producido un error o no. Esta verificación se hace sumando en módulo 2 todos los bits
del bloque recibido y comprobando el resultado. Si se usó paridad par y la suma da 0 entonces
no hay errores. Por el contrario, si estando codificado con paridad par el resultado da 1 quiere
decir que un error ha ocurrido.
Figura 6. Generación de bit de paridad. El bit de polarización es 1 para
paridad impar ó 0 para paridad par.
Indudablemente, este código (como todos en realidad) no es perfecto y pueden darse
casos en los que ocurren errores y el sistema no los detecta. Por ejemplo, si ocurren 2 errores
Codificación de canal
9
en el bloque transmitido y se está usando paridad par, el resultado de la suma de todos los
bits en el decodificador va a dar 0. En tal caso el decodificador no estaría detectando el error.
Es más aún, lo mismo pasa si se producen 4, 6, 8, etc. errores. Por el contrario, el sistema
será capaz de detectar 1, 3, 5, etc. errores.
Para este esquema de codificación la tasa de código es k/k+1. La ventaja que tiene este
esquema es su sencilla implementación. Un conjunto de compuertas XOR permiten generar el
bit de paridad, como lo muestra la Figura 6.
Hay que tener en cuenta que este esquema de codificación no puede corregir los
errores sino que sólo puede detectarlos. Teniendo en cuenta que sólo se puede detectar un
número impar de errores (o par, si el bit de paridad es impar) tratemos de cuantificar la
eficiencia de este código. Asumiendo que todos los bits del bloque son igualmente probables y
que son independientes entre sí, podemos escribir la probabilidad de que ocurran j errores en
un bloque de n bits de la siguiente manera:
n
P( j, n) = p j (1 − p)n − j
j
(7)
donde p es la probabilidad de que un bit sea recibido con error, o probabilidad de
transición del canal. El número combinatorio
n
n!
=
j
!
(
n
− j)!
j
representa las diferentes maneras en que j bits pueden ser erróneos dentro de un
bloque de n bits. Por lo tanto, en un código de detección de error con paridad simple, la
probabilidad Pnd de que un bloque de n bits erróneo no sea detectado es:
n / 2 (para n par)
(n-1)/2 (para n impar)
Pnd =
∑
j =1
n 2 j
p (1 − p)n−2 j
2 j
(8)
Ejemplo. Configurar un código de detección de error (4, 3) con bit de paridad par, de tal
manera que el bit de paridad aparezca en el extremo izquierdo del código. ¿Cuáles son los
errores que puede detectar? Calcular la probabilidad de que NO se detecte un mensaje
erróneo, asumiendo que todos los bits son independientes entre sí y que la probabilidad de
error de bit o probabilidad de transición del canal es p = 10-3.
Solución.
Mensaje Paridad Código de bits
000
0
0 000
100
1
1 100
010
1
1 010
110
0
0 110
001
1
1 001
101
0
0 101
011
0
0 011
111
1
1 111
El código es capaz de detectar 1 ó 3 errores en cada símbolo o palabra de código. La
probabilidad de que no se detecte un error que ha ocurrido en una palabra de código es igual a
la probabilidad de que ocurran 2 ó 4 errores en cualquier lugar de la palabra de código:
10
Codificación de canal
4
4
Pnd = p 2 (1 − p)2 + p 4
2
4
= 6 p 2 (1 − p)2 + p 4
= 6 p 2 − 12 p 3 + 7 p 4
= 6(10 − 3 )2 − 12(10 − 3 )3 + 7(10 − 3 ) 4 ≅ 6 × 10 − 6
Ganancia de código
La Figura 7 muestra curvas características de probabilidad de error de bit PB en función
de Eb/N0. Se compara una curva característica de modulación bipolar en banda base, sin
codificar, con otras dos curvas del mismo esquema de modulación pero codificadas. Una lleva
un código (24, 12) y la otra un código (127, 92). En el primer caso (n - k) = 12 y en el
segundo caso (n – k) = 35.
Figura 7. Comparación de curvas de probabilidad de error de bit
entre un sistema sin codificar (1, 1) y dos esquemas codificados.
Obviamente, es de esperar que el agregado de un código de detección o corrección de
error produzca una mejora en el desempeño de PB. Sin embargo, nótese en la figura que las
tres curvas se cruzan casi en un punto (aproximadamente en 6 dB) que por debajo o por
encima de él la variación de PB presenta características diferentes. Concretamente, los códigos
de error comienzan a ser efectivos a partir de Eb/N0 mayor a esos 6 dB. Para valores menores
a este umbral los códigos empeoran el desempeño (confiabilidad) en lugar de mejorarlo. La
Codificación de canal
11
explicación de esta característica es la siguiente: el bloque con redundancia (cualquiera sea
ella) se debe transmitir en el mismo tiempo que el bloque sin redundancia (sin codificar). Al
agregar bits de redundancia con la obligación de no modificar el tiempo de transmisión de
símbolos, es necesario que cada bit que forma la palabra de código de n bits tenga menor
duración (menor tiempo de bit T), en comparación con el tiempo de bit original. Pensemos que
ahora tenemos que “meter” n bits en el mismo tiempo que antes metíamos k bits, siendo
n > k. Esto produce una menor energía de bit en cada bit del bloque codificado (ya que la
energía de bit es directamente proporcional a T)4, con lo cual aumenta la probabilidad de error
de bit pues ésta es dependiente de Eb. Para una tasa de transmisión elevada, o sea T pequeño,
la relación Eb/N0 tiende a ser pequeña. Si encima se le agregan bits de redundancia entonces
Eb tiende a ser más pequeño aún, con lo cual los bits de redundancia tienen más influencia en
la energía de bit que en la mejora de performance que pueden producir por sí mismos como
parte de un código de corrección de errores. Superado un cierto umbral de Eb (la tasa de
transmisión tiende a ser más lenta) entonces los bits de redundancia empiezan a tener más
contribución por su efecto de detección o corrección que por su efecto indeseado de
disminución de la energía de bit Eb.
Por lo tanto, los códigos de detección o corrección de error comienzan a ser efectivos
por encima de un cierto umbral de la relación Eb/N0. La ganancia de código es la reducción,
expresada en decibeles, de la relación Eb/N0 requerida para un cierto valor de probabilidad de
bit, que se obtiene usando un código de control de error. Por ejemplo, en la figura se ve que
para una probabilidad de error de bit PB = 10-5, el código (24, 12) tiene una ganancia de
código de aproximadamente 2 dB respecto del mismo esquema sin codificar. El código (127,
92) tiene una ganancia de aproximadamente 2,5 dB.
Ejemplo. Comparar la probabilidad de error de mensaje, en un enlace de
comunicaciones, con código corrector de error y sin él. Asumir las siguientes características
para el sistema sin codificar: modulación bipolar en banda base, ruido blanco Gaussiano,
S/N0 = 43.776, tasa de datos R = 4.800 bits/s. Para el caso codificado asumir un código
corrector de error (15,11) capaz de corregir un error simple dentro de un bloque de 15 bits.
Solución.
Sea p la probabilidad de error de bit (probabilidad de transición de canal) del sistema
sin codificar:
(
p = Q 2E b / N 0
)
y pc la probabilidad de error de bit (probabilidad de transición de canal) del sistema
codificado:
(
pc = Q 2E c / N 0
)
Eb/N0 es la energía de bit por densidad espectral de potencia de ruido del sistema sin
codificar y Ec/N0 es la energía de bit por densidad espectral de potencia de ruido del sistema
codificado. Q(x) es la función de error.
Con el sistema sin codificar tenemos lo siguiente:
Eb
S
=
= 9,12 (9,6 dB)
N0
RN 0
4
La energía de bit Eb es función tanto del tiempo de bit como del cuadrado de la amplitud de tensión o corriente del
bit. Por lo tanto, una disminución de la energía de bit como consecuencia de la disminución del tiempo de bit T podría
compensarse con un aumento de la amplitud de la señal o aumento de potencia, cosa que no siempre es posible
hacer. Obviamente, también podría mejorarse la relación Eb/N0 disminuyendo N0 pero eso es más difícil todavía puesto
que la densidad espectral de potencia de ruido depende de las condiciones físicas del canal de comunicación.
12
Codificación de canal
2E b
p = Q
N0
= Q 18,24 = 1,02 × 10 − 5
(
)
(9)
La probabilidad de que el bloque sin codificar sea recibido con al menos un error es:
PM = 1 − (1 − p)k
11
(1
1 − p)
424
3
=1−
= 1,12 × 10 − 4
probabilidad de que
los 11 bits sin
codificar sean
recibidos correctamente
(10)
Con codificación:
En este caso, la tasa de símbolo es 15/11 veces la tasa de bit.
Rc = 4800 ×
15
≅ 6545 bps
11
Ec
S
=
= 6,688 (8,25 dB)
N0
Rc N 0
Nótese que la relación Ec/N0 para cada bit del código es menor que para los bits sin
codificar ya que se ha aumentado la tasa de bit (pues los bits son “más angostos” debido a su
menor duración) y la potencia se supone constante. Entonces, con el resultado anterior,
tenemos:
2E c
pc = Q
N0
= Q 13,38 = 1,36 × 10 − 4
(
)
(11)
Como consecuencia de la mencionada disminución de la energía de bit, la probabilidad
de error de bit ha empeorado y aún no se ve la supuesta mejoría que debería brindar el
sistema con código de corrección de error. Ahora vamos a calcular la probabilidad de error de
mensaje. Es decir, calculamos la probabilidad de que se produzcan dos bits erróneos o tres, o
cuatro, etc:
n = 15
PMc =
15
(pc ) j (1 − pc )15 − j
j =2
∑ j
(12)
La sumatoria comienza en j = 2 ya que el código corrige todos los errores simples
dentro del bloque de n = 15 bits. Se obtiene una buena aproximación usando sólo el primer
término de la sumatoria:
15
2
13
PMc = (pc ) (1 − pc ) = 1,94 × 10 − 6
2
(13)
Ahora se ve, comparando los resultados, que la introducción del código corrector de
error produce una mejora de 58 veces.
Códigos de bloque lineales
Los códigos de bloque lineales son una clase de códigos de verificación de paridad más
general que los códigos con paridad simple y también pueden ser caracterizados por la
notación (n, k) descripta anteriormente. Una vez más, el codificador transforma un mensaje de
Codificación de canal
13
k bits (al que llamaremos vector de mensaje) en un bloque más grande de n bits (al que
llamaremos vector de código).
Los k bits del mensaje pueden formar 2k mensajes distintos a los que llamaremos
k-uplas (secuencias de k dígitos). Los n bits del bloque pueden formar, como máximo, 2n
diferentes secuencias, llamadas n-uplas. El procedimiento de codificación asigna a cada uno de
los 2k mensajes de la k-upla uno de los 2n posibles mensajes de la n-upla. Un código de bloque
representa una asignación uno a uno, mediante la cual los 2k mensajes de la k-upla son
mapeados de manera unívoca en un nuevo conjunto de 2k mensajes pertenecientes a la
n-upla.
Espacios vectoriales
El conjunto formado por una n-upla, Vn, es llamado espacio vectorial sobre el campo
binario de dos elementos, 0 y 1. El campo binario tiene dos operaciones aritméticas, suma y
multiplicación. El resultado de estas operaciones pertenece también al campo binario. En el
campo binario estas reglas aritméticas se definen de la siguiente manera:
0
0
1
1
Suma
⊕0=
⊕1=
⊕0=
⊕1=
0
1
1
0
Multiplicación
0⋅0=0
0⋅1=0
1⋅0=0
1⋅1=1
La operación designada por el símbolo ⊕ corresponde a una suma en módulo 2.
Un subconjunto S del espacio vectorial Vn se llama subespacio si cumple con las dos
condiciones siguientes:
1. El vector nulo (todos ceros) pertenece a S.
2. La suma de dos vectores en S también pertenece a S.
Estas propiedades son fundamentales para la caracterización algebraica de los códigos
de bloque lineales. Supóngase que Vi y Vj son dos vectores de código pertenecientes a un
código de bloque binario. Se dice que el código es lineal si, y sólo si, (Vi ⊕ Vj) es también un
vector de código. Por lo tanto, un código de bloque lineal es aquel cuyos vectores,
pertenecientes al subespacio, no pueden crear vectores fuera dicho subespacio.
Por ejemplo, el espacio vectorial V4 queda completamente definido por las siguientes
24 = 16 4uplas:
0000 0001 0010 0011 0100 0101 0110 0111
1000 1001 1010 1011 1100 1101 1110 1111
Un ejemplo de un subconjunto de V4 que forma un subespacio es
0000 0101 1010 1111
Es fácil comprobar que la suma de dos vectores cualesquiera de este subespacio da
como resultado otro vector perteneciente a ese subespacio. Un conjunto de 2k n-uplas se llama
código lineal de bloque si, y sólo si, es un subespacio del espacio vectorial Vn de todas las nuplas (2n). La Figura 8 trata de ilustrar este concepto. Podemos imaginar al espacio vectorial
Vn formado por 2n n-uplas (el total de puntos que se muestra en la figura). Dentro de este
14
Codificación de canal
espacio, existe un subconjunto de 2k n-uplas que forman un subespacio. Estos 2k vectores se
muestran como puntos más grandes y representan a los vectores de código que son válidos.
Un mensaje, antes de ser transmitido, se codifica previamente en uno de los 2k vectores de
código válidos y luego finalmente se transmite. Como consecuencia del ruido que hay en el
canal de comunicación, al receptor llega una versión perturbada del código original. Ese vector
perturbado es uno de los 2n vectores de la n-upla que forma el espacio Vn, y que puede ser un
punto grande o un punto chico de los que se muestran en la figura. Si el vector perturbado no
difiere mucho del vector original (vector válido), es decir, no está muy lejos del vector original,
entonces el decodificador puede decodificar el mensaje correctamente. ¿Cómo? Eligiendo el
punto grande más cercano. Si el vector recibido se apartó mucho de su posición original en la
Figura 8, entonces el decodificador elige una vez más el punto grande más cercano, pero en
este caso la decodificación va a ser errónea. La idea detrás de la elección de un código se
puede establecer así:
1. Tratar de buscar un código eficiente extrayendo del espacio Vn la mayor cantidad
posible de vectores de código. Esto es equivalente a decir que se busca agregar la menor
cantidad de redundancia posible. Es decir, la diferencia entre n y k debería ser lo más pequeña
posible para no agregar mucho ancho de banda extra.
2. Buscar que los vectores de código estén lo más apartados posible uno de otro (es
decir, que sean lo menos parecido posible). Esto es para que cuando el código de vector sea
perturbado por el ruido se siga decodificando correctamente.
Figura 8. Estructura de un espacio vectorial.
Ejemplo de código de bloque lineal
Veamos la siguiente asignación de códigos, correspondiente a un esquema de
codificación (6, 3). Hay 2k = 23 = 8 vectores de mensaje y por lo tanto hay 8 vectores de
código. Hay 2n = 26 = 64 6-uplas en el espacio vectorial V6. Los vectores de mensaje y los
vectores de código se muestran ordenados en la tabla siguiente.
Codificación de canal
15
Vector de mensaje Vector de código
000
000000
100
110100
010
011010
110
101110
001
101001
101
011101
011
110011
111
000111
Es fácil verificar que los ocho vectores de código que se muestran arriba forman un
subespacio de V6. Esto es, el vector nulo está presente y la suma de dos vectores de código
cualesquiera produce como resultado otro vector de código que pertenece al subespacio. Por lo
tanto, estos vectores de código representan un código de bloque lineal, conforme a la
definición.
Matriz generadora
Si el valor de k es grande, armar una tabla como la vista en el ejemplo anterior
resultaría realmente muy engorroso. Por ejemplo, para un código (127, 92) hay 292 vectores
de código distintos, esto es más o menos 5 x 1027. Si el procedimiento de codificación consiste
en una tabla entonces se necesitaría una cantidad de memoria extremadamente grande para
almacenar a todos los vectores de código. Para evitar esto, se recurre a un tratamiento
matricial del tema.
Dado que el conjunto de vectores de código es un subespacio de dimensión k del
espacio vectorial de dimensión n (k < n), siempre es posible encontrar un conjunto de n-uplas,
menor que 2k, que puedan generar todos los 2k vectores miembros del subespacio. El conjunto
más pequeño de vectores linealmente independientes que generan al subespacio se llama base
del subespacio y el número de vectores de esta base es la dimensión del subespacio. Cualquier
base formada por k n-uplas linealmente independientes, V1, V2, ..., Vk puede ser usada para
generar los vectores de código de bloque requeridos. Esto se debe a que cada vector de código
es una combinación lineal de V1, V2, ..., Vk. Esto es, cada vector de código U (de un total de
2k) puede ser escrito como:
(14)
U = m1 V1 + m2 V2 + L + mk Vk
donde mi = (0 ó 1) son los dígitos de mensaje, con i desde 1 hasta k.
En general, podemos definir una matriz generadora mediante el siguiente arreglo de
k x n:
V1 v 11 v 12
V v
v 22
G = 2 = 21
M M
Vk v
k1 v k 2
L v 1n
L v 2n
L v kn
(15)
Por convención, los vectores de código se designan por vectores fila. Así, el mensaje m,
una secuencia de k bits de mensaje, es una matriz de 1 fila por k columnas:
m = m1 , m2 , K , mk
La generación del vector de código se puede escribir en forma matricial de la siguiente
manera:
16
Codificación de canal
(16)
U = mG
Para el ejemplo del código (6, 3) visto anteriormente, una matriz generadora sería:
V1 1 1 0 1 0 0
G = V2 = 0 1 1 0 1 0
V3 1 0 1 0 0 1
(17)
donde V1, V2 y V3 son tres vectores linealmente independientes (un subconjunto de los
ocho vectores de código) que pueden generar todos los vectores de código. La independencia
lineal se comprueba viendo que la suma de dos cualesquiera de ellos no da como resultado a
ninguno de los tres vectores generadores. Para generar el vector de código correspondiente a,
por ejemplo, el vector de mensaje 1 1 0, se aplica entonces la siguiente ecuación:
V1
U = [1 1 0] ⋅ V2 = 1 ⋅ V1 + 1 ⋅ V2 + 0 ⋅ V3
V3
U = 110100 + 011010 + 000000
= 101110 (vector de código para el vector de mensaje 1 1 0)
Por lo tanto, el vector de código correspondiente a un vector de mensaje es una
combinación lineal de las filas de G. Ya que los códigos quedan completamente definidos por G
el codificador sólo necesita almacenar las k filas de G en lugar todos los 2k vectores de código.
Nótese que, para el ejemplo visto es suficiente un arreglo de 3 x 6 en lugar de uno de 8 x 6.
Códigos de bloque lineales sistemáticos
Un código de bloque lineal sistemático (n, k) es un mapeo desde un vector de mensaje
k-dimensional a un vector de código n-dimensional, de tal manera que parte de la secuencia
generada coincide con los k dígitos del mensaje. Es decir, un código sistemático es aquel en el
que la secuencia de k bits del mensaje aparece explícitamente en el código. Los restantes
(n-k) dígitos son bits de paridad. Un código sistemático tiene una matriz generadora de la
siguiente forma:
G = [P I k ]
p11
p21
=
M
pk1
p12
p22
pk 2
L p1(n − k ) 1 0 L 0
L p2(n − k ) 0 1 L 0
M
L pk (n − k ) 0 0 L 1
(18)
donde P se llama matriz de paridad (cada pij vale 0 ó 1) e Ik es una matriz identidad de
dimensión k x k (tiene “unos” en su diagonal principal y ceros en el resto de las posiciones).
Con esta generación sistemática no es necesario almacenar en memoria la matriz identidad.
Combinando la (16) y la (18) cada vector de código se puede expresar como sigue:
u1 , u2 , K , u n
p11
p21
= [m1 , m2 , K , mk ] ×
M
pk1
p12
p22
pk 2
L p1(n − k ) 1 0 L 0
L p2(n − k ) 0 1 L 0
M
L pk (n − k ) 0 0 L 1
donde
Codificación de canal
17
para i = 1,..., (n - k)
u i = m1 p1i + m2 p2i + L + mk pki
para i = (n - k + 1),...n
= mi − n + k
Dada la k-upla de mensaje
m = m1, m2 , K , mk
y la n-upla general del vector de código
U = u1 , u2 , K , u n
entonces el vector de código sistemático puede expresarse como:
U = p1 , p2 , K , pn − k ,m1 , m2 , K , mk
14442444
3 144
42444
3
bits de paridad
(19)
bits de mensaje
donde
p1 = m1p11 + m2 p21 + L + mk pk1
(20)
p2 = m1p12 + m2 p22 + L + mk pk 2
pn −k = m1p1(n− k ) + m2 p2(n− k ) + L + mk pk (n− k )
Normalmente los códigos sistemáticos se escriben poniendo del lado izquierdo los bits
de mensaje y del lado derecho los bits de paridad. Nótese la característica de los códigos
sistemáticos. Los bits de paridad se forman como combinación lineal de los bits de
mensaje. Por eso tienen particular interés. La matriz identidad se puede obviar del codificador
ya que los bits de paridad pi se generan solamente con la matriz de paridad P. Luego, el vector
U se forma con los bits de mensaje (en forma directa, sin ninguna operación matemática),
más los bits de paridad generados con P que se adjuntan a los bits de mensaje.
De acuerdo a lo que acabamos de ver, para el código (6, 3) del ejemplo visto antes, el
vector de código puede escribirse así:
1 1 0
U = [m1 , m2 , m3 ] ⋅ 0 1 1
1 0 1
14243
1 0 0
0 1 0
0 0 1
14243
P
I3
U = m1 + m3,m1 + m2 ,m2 + m3 ,m1,m2 ,m3
14243 14243 14243 {{ {
u1
u2
(21)
u3
u4
u5
(22)
u6
Se puede ver que los bits redundantes se forman de diferentes maneras. El primer bit
de paridad es la suma del primer y tercer bit de mensaje; el segundo bit de paridad es la suma
del primero y segundo bit de mensaje y el tercer bit de paridad es la suma del segundo y
tercer bit de mensaje. Una estructura de este tipo, comparada con los esquemas de un solo bit
de paridad, provee mayor capacidad para detectar y corregir errores.
Matriz de verificación de paridad
Para poder realizar el proceso inverso en el receptor, es decir, para poder decodificar el
vector de código recibido, definimos una matriz H a la que llamamos matriz de verificación de
paridad. Por cada matriz generadora G de dimensión (k x n) existe una matriz H de dimensión
(n – k) x n de tal manera que las filas de G son ortogonales a las filas de H. Esto significa que
GHT = 0, donde HT es la matriz transpuesta de H, y 0 es una matriz nula de dimensión
18
Codificación de canal
k x (n – k). La matriz transpuesta de H es de dimensión n x (n – k), cuyas filas son las
columnas de H y cuyas columnas son las filas de H. Para cumplir con los requerimientos de
ortogonalidad la matriz H se escribe como:
[
PT
H = In − k
]
(23)
Por lo tanto, la matriz transpuesta de H es
I
HT = n− k
P
0
1
1
0
M
0
0
=
p
p12
11
p21 p22
M
pk1 pk 2
L
L
L
L
L
L
1
p1(n− k )
p2(n −k )
pk (n− k )
0
0
(24)
Se puede ver que GHT = 0:
I
GHT = [P I k ] ⋅ n − k
P
=P+P
(25)
Como P + P es la suma en módulo 2 de dos matrices resulta P + P = 0.
También se puede verificar que el producto UHT da cero:
UHT = (mG) ⋅ HT
= m ⋅ (GHT )
= m⋅0
=0
Teniendo la matriz H de verificación de paridad se la puede usar para verificar si el
vector de código recibido es un código válido del conjunto de vectores. U es un código de
vector generado por la matriz G (o sea, un código válido) si, y sólo si, UHT = 0.
Test de síndrome
Supongamos que el vector que estamos recibiendo no es igual al vector transmitido ya
que ha sido perturbado por el ruido. Digamos entonces que el vector recibido es r = r1,
r2,...,rn. Por lo tanto, hay 2k vectores U posibles, mientras que hay 2n vectores r posibles.
Podemos escribir:
r =U+e
(26)
donde e = e1, e2,...,en es el vector de error o patrón de error introducido por el canal.
Hay un total de 2n-1 potenciales patrones de error (el vector e = 0 no produce error) en el
espacio de 2n n-uplas. Se define síndrome de r:
S = rHT
Codificación de canal
(27)
19
El síndrome es el resultado de una verificación o comprobación de la paridad hecha
sobre el vector r para determinar si r es un miembro del conjunto de vectores de código (o
sea, un vector válido). Si r es miembro entonces el síndrome S tiene valor 0. Si r tiene errores
detectables entonces el síndrome tiene algún cierto valor distinto de cero. Si r tiene errores
corregibles entonces el síndrome tiene algún valor distinto de cero que puede ser asociado al
patrón de error que causó el error. El decodificador tomará acciones para detectar y corregir el
error (en el caso de un FEC) o bien solicitará una retransmisión (en el caso de un ARQ).
Combinando la (26) y la (27) se obtiene:
S = (U + e) ⋅ HT
(28)
= UHT + eHT
Y como UHT = 0 entonces resulta
S = eHT
(29)
Nótese que el síndrome puede ser calculado tanto con el vector recibido r como con el
patrón de error e. Una propiedad importante de los códigos lineales de bloque, fundamental
para el proceso de decodificación, es que el proceso de mapeo entre los patrones de error
corregibles y el síndrome es uno a uno.
Ejemplo. Test de síndrome.
Supóngase que se transmite el vector de código U = 101110 del ejemplo de código (6,
3) visto antes, y se recibe el vector r = 001110, es decir, se produce un error en el bit del
extremo izquierdo. Calcular el valor del síndrome S = rHT y verificar que es igual a eHT.
Solución.
S = rHT
1
0
0
= [0 0 1 1 1 0] ⋅
1
0
1
0
1
0
1
1
0
0
0
1
0
1
1
= [1, 1 + 1, 1 + 1] = [1 0 0] (sindrome del vector de código perturbado)
Calculando el síndrome por el otro camino resulta:
S = eHT = [1 0 0 0 0 0] ⋅ HT = [1 0 0]
Las propiedades del síndrome las podemos resumir como sigue:
1. El síndrome depende sólo del patrón de error y no del codeword transmitido.
2. Dos patrones de error que difieren entre sí por un codeword válido tienen el mismo
síndrome.
3. El síndrome S es la suma de aquellas columnas de la matriz H correspondientes a
las ubicaciones del error.
4. Usando decodificación con síndrome, un código lineal de bloque (n, k) puede
corregir hasta t errores por codeword, siempre que n y k satisfagan el siguiente límite de
Hamming:
20
Codificación de canal
t
2n − k ≥
n
∑ i
(30)
i =0
Si la (30) se cumple con el signo igual, se dice que el código es perfecto.
Corrección de error
En virtud de lo visto hasta acá, está claro que no sólo es posible detectar un error sino
que también es posible corregirlo. Esto se debe a que se tiene la capacidad de conocer el
patrón de error a partir del cálculo del síndrome. Escribamos las 2n n-uplas que representan
todos los posibles vectores recibidos en un arreglo tal que la primera fila contenga todos los
vectores de código válidos, comenzando por el vector nulo, y la primera columna contenga
todos los esquemas o patrones de error corregibles. Cada fila, llamada coset, consiste en un
patrón de error en la primera columna (llamado coset líder) seguido por los vectores de código
válidos perturbados por ese coset líder. Este arreglo (llamado arreglo estándar), para un
código (n, k) se escribe de la siguiente manera:
U1
e2
e3
M
ej
U2
U2 + e 2
U2 + e 3
M
U2 + e j
M
e 2n − k
M
U2 + e 2 n − k
L
L
L
Ui
Ui + e2
Ui + e3
L
L
L
U 2k
U 2k + e 2
U2 k + e 3
(31)
L
Ui + e j
M
L U i + e 2n − k
L
U 2k + e j
L U2 k + e 2 n − k
El arreglo contiene todas las 2n n-uplas del espacio Vn (cada n-upla aparece sólo una
vez). Cada coset consiste de 2k n-uplas. Por lo tanto hay (2n/2k) = 2n-k cosets. Supóngase que
se transmite el vector Ui sobre un canal con ruido. Si el patrón que causa el error es un coset
líder, el vector recibido será decodificado correctamente. Si el patrón de error que causa la
perturbación no es un coset líder entonces se producirá una decodificación errónea.
Si ej es el coset líder o patrón de error del j-ésimo coset, entonces Ui + ej es una n-upla
que pertenece a este coset o fila del arreglo estándar. El síndrome de esta n-upla es:
S = (U i + e j ) ⋅ HT = U i HT + e j HT
Ya que Ui es un vector de código válido resulta ser que UiHT = 0, y por lo tanto se
puede escribir:
S = (U i + e j ) ⋅ HT = e j HT
(32)
De esta última ecuación se puede ver que todos los miembros de un coset tienen el
mismo síndrome y por eso el síndrome es usado para estimar el patrón de error. El síndrome
para cada coset es diferente.
El proceso para la corrección de errores es el siguiente:
1. Calcular el síndrome de r usando S = rHT.
2. Localizar el patrón de error, ej, que tiene el mismo síndrome que el calculado en 1,
y cuyo valor es igual a rHT.
3. Este patrón de error se lo toma como el que causa la perturbación en el canal.
Codificación de canal
21
4. El vector recibido corregido se calcula como U = r + ej. La suma es consecuencia de
las reglas de operación en módulo 2 (sumar o restar es lo mismo).
Localización del patrón de error
Volviendo al ejemplo de código (6, 3) visto al comienzo, ubicaremos ahora las 26 = 64
6-uplas de acuerdo al arreglo estándar que se muestra en la matriz (31):
000000
000001
000010
000100
001000
010000
100000
010001
110100
110101
110110
110000
111100
100100
010100
100101
011010
011011
011000
011110
010010
001010
111010
001011
101110
101111
101100
101010
100110
111110
001110
111111
101001
101000
101011
101101
100001
111001
001001
111000
011101
011100
011111
011001
010101
001101
111101
001100
110011
110010
110001
110111
111011
100011
010011
100010
000111
000110
000101
000011
001111
010111
100111
010110
Usando la (30) se puede verificar que este código corrige todos los errores simples. Los
vectores de código válidos son los ocho vectores de la primera fila, y los patrones de error
corregibles son los ocho vectores líderes de la primera columna (incluyendo el patrón de error
nulo). Todos los patrones de error de 1 bit son corregibles. Nótese que luego de ubicar todos
los patrones de error de 1 bit queda todavía algún patrón más ya que no se ha completado la
64 6-upla. Es decir, queda un coset libre (con un coset líder asociado) que puede ser
completado y por lo tanto hay un patrón de error más que puede ser corregido. Al respecto,
contamos con flexibilidad para elegir este patrón de manera tal de completar la n-upla en el
último del coset, sin que se repitan las 6uplas. En la tabla anterior, este patrón líder se eligió
como 010001. La decodificación será correcta si, y sólo si, el patrón de error causado por el
canal es uno de los patrones líderes.
Calculamos ahora el síndrome correspondiente a cada una de las secuencias erróneas
corregibles por medio del producto ejHT, para cada patrón líder:
1
0
0
S = ej ⋅
1
0
1
0 0
1 0
0 1
1 0
1 1
0 1
Los resultados se muestran en la tabla siguiente. Ya que cada síndrome es único, el
decodificador puede identificar el patrón de error e al cual corresponde.
Patrón de error síndrome
000000
000001
000010
000100
001000
010000
100000
010001
22
000
101
011
110
001
010
100
111
Codificación de canal
Como se dijo ya anteriormente, se recibe un vector r y se calcula su síndrome usando
la ecuación S = rHT. Luego se usa ese síndrome en la tabla anterior para encontrar el
correspondiente patrón de error. Este patrón de error es una estimación del error y se denota
como ê. Finalmente, el decodificador suma ê a r para obtener una estimación del vector
transmitido, al que lo identificará por Û.
ˆ =r+e
ˆ = (U + e) + e
ˆ = U + (e + e
ˆ)
U
(33)
Si el patrón de error estimado es igual al patrón real, o sea, si ê = e entonces Û = U.
Por el contrario, si el error estimado es incorrecto entonces el decodificador estimará un vector
de código que en realidad no fue transmitido y en tal caso se producirá un error indetectable.
Ejemplo. Supongamos que se transmite U = 101110 y que el vector recibido es
r = 001110. Mostrar cómo el decodificador, usando la tabla de síndrome anterior, puede
corregir el error.
Solución.
El síndrome r se calcula como:
S = [0 0 1 1 1 0] ⋅ HT = [1 0 0]
Usando la tabla de la página anterior, el patrón de error estimado corresponde a:
ˆ =1 0 0 0 0 0
e
El vector corregido, estimado, es
ˆ =r+e
ˆ
U
= 0 0 1 1 1 0 +1 0 0 0 0 0
=1 0 1 1 1 0
Ya que el patrón de error estimado es igual al patrón de error verdadero el
procedimiento para este ejemplo conduce a Û = U.
Peso y distancia de vectores binarios
La capacidad de corrección de error de un sistema puede ser analizada investigando su
estructura. El peso de Hamming, w(U), de un vector U queda definido como el número de
elementos distintos de cero en U. Ya que U es un vector con elementos binarios, el peso de
Hamming de U es igual al número de “unos” que tiene el vector. Por ejemplo, si
U = 100101101, entonces w(U) = 5. La distancia de Hamming entre dos vectores U y V,
d(U, V), queda definida como el número de elementos diferentes entre ambos vectores. Por
ejemplo,
U = 100101101
V = 011110100
d(U, V) = 6
Debido a las propiedades de la suma en módulo 2, si sumamos U y V obtenemos:
U + V = 111011001
Codificación de canal
23
Por lo tanto, se puede apreciar que la distancia de Hamming entre dos vectores es el
peso de Hamming de la suma (o resta) de ambos. Esta propiedad es útil para hallar la
distancia mínima entre dos vectores de un conjunto de codewords. Como la suma de dos
codewords da como resultado otro codeword perteneciente al subespacio, la distancia mínima
viene dada por aquel vector de código del subespacio que tiene la menor cantidad de “unos”
(sin considerar el vector nulo). Esto nos libera de calcular la distancia entre cada uno de los
pares posibles de vectores de código. La distancia entre vectores de código nos da una pauta
de qué tan separados están entre sí. En particular, la distancia mínima dmin nos da el peor caso
o “peor separación”. Con esto podemos determinar la capacidad de corrección o detección de
errores que tiene el código.
Una vez que se recibe el vector r, la tarea del decodificador es estimar cuál fue el
vector U transmitido. La estrategia es entonces buscar aquel vector U que presente la menor
distancia respecto del vector r recibido.
Figura 9. Corrección y detección de errores en función de la distancia de
Hamming.
En la Figura 9 se muestra la distancia de Hamming entre dos vectores, U y V. Los
puntos negros entre ambos representan casos posibles de vectores recibidos r. En la
Figura 9(a) se muestra un vector recibido r1 que tiene distancia 1 respecto del vector U y
distancia 4 respecto del vector V. Si el detector está diseñado para corregir errores entonces
optará por el vector U que es el más cercano a r1. Si r1 fue el resultado de haber recibido
realmente el vector de código U con un bit erróneo, entonces la decodificación es correcta.
Pero, si r1 fue el resultado de haber recibido el vector de código V con cuatro bits erróneos
24
Codificación de canal
entonces la decodificación es incorrecta. Una interpretación similar puede hacerse para el
ejemplo (b) de la Figura 9, en donde un doble error en la transmisión de U permite una
decodificación correcta, pero si se trata de un triple error en la transmisión de V entonces la
decodificación es incorrecta ya que el detector toma una decisión errónea. Finalmente, en el
ejemplo (c), si el vector transmitido fue U y se producen tres errores, entonces el detector se
equivocará en la detección, ya que optará por estimar V que es el vector más cercano. Si r3
fue la consecuencia de haber recibido el vector de código V con dos errores entonces la
detección será correcta.
Si la tarea del receptor es detectar errores y no corregirlos, se puede ver en la
Figura 9 que cualquier vector recibido afectado por el ruido, representado por un punto negro
y que implica 1, 2, 3 ó 4 bits erróneos, puede ser detectado. Sin embargo, si se producen 5
errores en la transmisión y el vector transmitido fue U, el detector recibirá V, con lo cual no
podrá detectar los errores (similarmente ocurre si se transmitió V y se producen 5 errores).
Del análisis hecho anteriormente podemos ver que la capacidad que tiene un
determinado código para detectar y/o corregir errores está relacionada con la distancia mínima
entre dos vectores de código. La tarea del detector, para el caso de corrección de errores, es
determinar en qué región está el vector recibido para tomar una decisión, como se muestra en
la Figura 9(a). Si el vector recibido “cae” en la región 1 el criterio es decidir por U. Si “cae” en
la región 2 el criterio es optar por el vector V. Con tal criterio, y con una distancia dmin = 5
como se muestra en el ejemplo, el detector puede corregir hasta 2 errores. En general el
máximo número garantizado de errores corregibles por palabra de código, t, viene dado por
la expresión:
− 1
d
t = min
2
(34)
donde x representa la parte entera de x. Tiene que quedar claro que la (34) nos dice
que el código puede corregir hasta t errores inclusive. Sin embargo, muchas veces un código
que corrige todas las secuencias posibles de hasta t errores puede también corregir ciertas
secuencias de t + 1 errores. Cuando vimos el ejemplo de código (6, 3) comprobamos que
quedaba una fila sin completar en el arreglo estándar, luego de haber puesto todos los
patrones de 1 error. En general, un código lineal de bloque (n, k) que con seguridad puede
corregir hasta t errores, es capaz de corregir un total de 2n-k patrones de error.
Un código de bloque que con seguridad corrige hasta t errores, tiene una probabilidad
de hacer una detección errónea Pe de la palabra de código, que viene dada por la siguiente
desigualdad:
n
Pe ≤
n
⋅ p j ⋅ (1 − p)n − j
j
j = t +1
∑
(35)
donde p es la probabilidad de transición del CSB. La igualdad en la (35) se produce
cuando el código es perfecto, es decir cuando el código corrige solamente hasta t errores y ni
uno más.
Un código también puede usarse para detectar errores solamente. En la Figura 9 vemos
que cualquier vector recibido caracterizado por un punto negro puede ser identificado como un
error. La capacidad de detectar e errores, viene dada por la distancia mínima de la siguiente
manera:
e = d min − 1
(36)
Un código de bloque con distancia mínima dmin garantiza que todos los patrones con
(dmin – 1) errores, o menos, pueden ser detectados, lo cual no significa que no puedan
Codificación de canal
25
detectarse algunos patrones de error más. Del arreglo estándar puede verse que un código (n,
k) puede detectar un total de (2n – 2k) patrones de error diferentes.
Designemos con Aj al número de vectores de código con peso j. Los números A0, A1,
A2,...An forman la distribución de pesos del código. Si el código se usa sólo para detección de
errores sobre un CSB, entonces la probabilidad de que el código no detecte un error en un
vector de código viene dada por la expresión:
n
Pnd =
∑A p
j
j
(1 − p)n − j
(37)
j =1
donde, una vez más, p es la probabilidad de transición del canal. Ya que el código tiene
una distancia mínima dmin, resulta que los valores de A1 hasta Admin – 1 son todos cero. Por lo
tanto, la (37) se puede rescribir como:
n
Pnd =
∑A p
j
j
(1 − p)n − j
(38)
j = d min
Este resultado surge de considerar que para que un error no sea detectado, el patrón
de error debe ser igual a un vector de código válido, puesto que generará otro vector de
código válido y consecuentemente el detector lo considerará como un vector de código sin
error. Lo que hace la (37) o (38) es considerar de cuántas maneras pueden generarse vectores
de código válidos.
26
Codificación de canal