Error en el posicionamiento indoor en dispositivos móviles
Anuncio

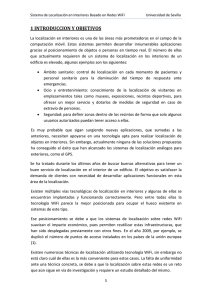
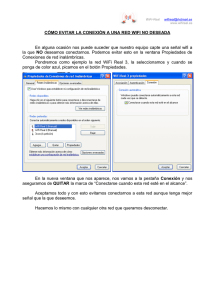
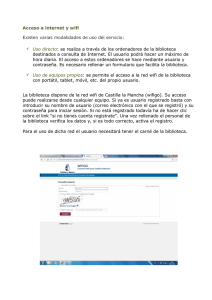
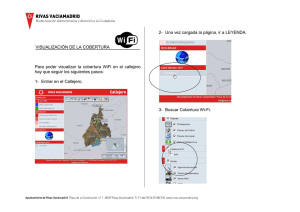
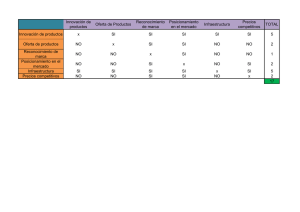
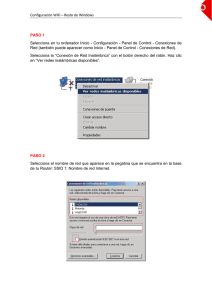
Cristina Regueiro Senderos PROYECTO DE INVESTIGACIÓN BÁSICA O APLICADA PEC3 Trabajo Final 2014 Cristina Regueiro Senderos PEC2: Estado del arte y planificación del trabajo U N I V E R S I T A T O B E R T A D E C A T A L U N Y A Error en el posicionamiento indoor en dispositivos móviles Cristina Regueiro Abstract — Location information is becoming increasingly necessary as every new smartphone incorporates a GPS (Global Positioning System) which allows the development of various applications based on it. However, it is not possible to properly receive the GPS signal in indoor environments. For this reason, new indoor positioning systems are being developed. As indoors is a very challenging scenario, it is necessary to study the precision of the obtained location information in order to determine if these new positioning techniques are suitable for indoor positioning. Index Terms — Interiores, posicionamiento, localización, WIFI, sensores inerciales, giroscopio, acelerómetro, brújula, precisión, error. I. D INTRODUCCIÓN esde hace unos años ha comenzado a aumentar la necesidad y utilidad de ser capaces de localizar a personas o elementos en el interior de un edificio. Por ejemplo, con fines de entretenimiento, como podría ser la posibilidad de ofrecer una información determinada a un visitante de un museo en función de la posición (y, por tanto, obra) en la que se encuentre. Por otro lado, se ha visto la posibilidad de facilitar la actuación en situaciones de emergencia, como podría ser la localización de salidas de emergencia cercanas ante un incendio en un edificio público o la localización del médico más cercano ante una alarma en un hospital. Por todo ello, cada vez se hace más necesario desarrollar métodos o técnicas que permitan posicionar a un usuario o elemento en el interior de un edificio (entornos indoor), ya que los sistemas basados en Sistemas de Posicionamiento Global (GPS) [1] (o incluso los sistemas GLONASS ruso [2] o GALILEO europeo [3]) amplia y eficazmente empleados, son ineficaces en estos entornos que se ven afectados por una amplia atenuación de la señal recibida. Las alternativas propuestas en la actualidad requieren de un hardware específico muy complejo (sensores, puntos de control, estaciones base…) por lo que resultan muy costosas. Por esta razón, es claramente necesario desarrollar nuevos sistemas de posicionamiento que funcionen correctamente en entornos de interiores y que no supongan grandes costes. Una posible solución consiste en emplear la misma idea del GPS pero con señales WIFI (como es el caso de los sistemas Ekahau [4], PlaceLab [5], o Herecast [6]) o el empleo de sistemas de posicionamiento inerciales [7][8] en los que se emplean sensores de movimiento de bajo coste (giroscopios, acelerómetros y/o brújulas) para estimar las modificaciones de posición de un elemento. Sin embargo, la precisión de estos sistemas es relativamente “desconocida” y es importante estimar cuál es la exactitud de las medidas que se realizan y poder acotar cuáles son las fuentes de error de medición para poder reducirlo en la medida de lo posible. La estructura del artículo es la siguiente: La Sección II incluye los principales objetivos de la presente investigación. La Sección III incluye un análisis detallado del estado del arte en cuanto a sistemas de posicionamiento empleados en interiores, mientras que la precisión de los mismos se analiza teóricamente en la Sección IV. La Sección V incluye un análisis teórico completo de la precisión de un sistema de posicionamiento real concreto, para analizar numéricamente la precisión de los elementos implicados en la sección VI. Finalmente, las conclusiones principales se resumen en la sección VII. II. OBJETIVOS El objetivo principal de la investigación consiste en determinar el error de la medida de localización obtenida mediante el uso de un sistema de posicionamiento basado en señales WIFI y un sistema de posicionamiento inercial. Su aplicación se realizará en entornos de interiores. El objetivo es determinar la precisión de dichos sistemas de posicionamiento. Para ello, se deben cumplir una serie de objetivos secundarios: − − − − Conocer diversos sistemas de posicionamiento empleados en interiores. Conocer cuáles son las fuentes principales de error en la medida de la posición para cada uno de los sistemas a analizar. Emplear un sistema de posicionamiento inercial y otro basado en señales WIFI ya existentes y basados en software libre, para realizar el estudio. Analizar los errores en la localización que se producen con cada uno de los sistemas analizados, estudiando las fuentes de error y la propagación de los mismos. − − Analizar comparativamente las fuentes de error y poder determinar cuáles de esos errores se pueden reducir con el objetivo de obtener medidas de posición más precisas. Obtener conclusiones sobre la reducción de los errores en la medida y el aumento de la precisión. III. SISTEMAS DE POSICIONAMIENTO EN INTERIORES La evolución de los sistemas de posicionamiento en interiores es reciente pero amplia. A continuación se detallan los principales grupos de sistemas de posicionamiento indoor [9],[10]. A. Marcadores fijos El primer sistema que apareció para la localización en entornos indoor fueron los marcadores fijos situados en distintas partes del edificio. Este sistema consiste en distribuir en ciertos puntos conocidos marcadores reconocibles por un dispositivo específico, por ejemplo imágenes que puedan ser identificadas rápidamente por una cámara (códigos QR, códigos BIDI…) [11],[12]. La principal ventaja de estos sistemas es que son sencillos y baratos de implantar. Además, al ser marcas localizadas, se consigue una gran precisión en la localización. Sin embargo, no son sistemas de localización propiamente dichos, ya que la localización debe ser activa por parte del usuario y además no es continua, sino que únicamente se localiza al usuario en los marcadores. Además, el reconocimiento de los marcadores puede no ser trivial y si se interpone cualquier obstáculo entre el marcador y el usuario, la localización no es posible. B. Sistemas inalámbricos Los sistemas inalámbricos se basan en el uso de las ondas electromagnéticas para obtener la localización del usuario con respecto a un punto de referencia conocido [13], [14]. Pueden usarse uno o varios métodos de posicionamiento [15] (triangulación, trilateración, análisis del escenario, proximidad) para que se determine la posición referenciada. Dependiendo de la frecuencia de las ondas electromagnéticas empleadas, estas tecnologías se clasifican en: infrarrojos, radiofrecuencia (RFID [16], WIFI [17], Bluetooth [18], redes móviles [19], UWB [20]…), y ultrasonidos. La principal ventaja de los sistemas inalámbricos para la localización en interiores es que son relativamente fáciles de implementar. Sin embargo, el principal inconveniente es que precisan de una infraestructura de red previa (varios sensores fijos en el edificio) y los receptores requieren de un hardware específico que en muchos casos no es habitual. Por ello, y dado que en la actualidad la mayor parte de los teléfonos móviles cuentan con receptores de WIFI o Bluetooth, éstas son las alternativas más estudiadas. Además, el caso del WIFI supone además, que la infraestructura de red necesaria está presente hoy en día en una gran cantidad de edificios, por lo que es más barata de implementar y más sencilla de extender, a pesar de que pueden existir zonas de sombra en las que la señal no llega que deben ser complementadas. C. Sistema inerciales Los sistemas de navegación inerciales (INS) [21] surgen para evitar la dependencia que tienen los sistemas inalámbricos de posicionamiento de la infraestructura de red previa y del hardware específico del receptor. Para ello emplean medidas de la IMU (Inertial Measurement Unit), que cuenta con sensores inerciales como acelerómetros, giroscopios y brújulas que determinan la distancia recorrida y la orientación de movimiento del usuario [22], [23], [24]. Además, requieren de una inicialización o calibración en la que se indique o se mida la posición inicial sobre la que se va a aplicar el movimiento y con ello se obtiene la posición (referida siempre a la posición inicial) de forma autónoma. La gran ventaja de los INS es que no precisan de infraestructura de red externa, con lo que su despliegue es muy barato. Además, en la actualidad la mayor parte de los teléfonos móviles cuentan con sensores de la IMU, por lo que se puede emplear este sistema en cualquier entorno indoor. Sin embargo, cuenta con dos inconvenientes principales: en primer lugar, requiere una inicialización de gran exactitud para que las medidas obtenidas mediante estos sistemas sean correctas. Por otro lado, el error en la medida de estos sistemas es elevado y acumulativo, por lo que es necesario “reinicializar” o recalibrar periódicamente el sistema y/o combinarlo con otros sistemas de posicionamiento en interiores. En resumen, se puede indicar que en base a las características de los principales métodos de posicionamiento en interiores, la “mejor” solución podría ser una híbrida entre posicionamiento basado en sistemas inalámbricos, concretamente en redes WIFI con un sistema de posicionamiento inercial que complemente la localización en las áreas de sombra [25]. Esto es debido a que las redes WIFI están ampliamente extendidas en numerosos edificios y que prácticamente cualquier teléfono móvil serviría de receptor. El uso combinado con sistemas inerciales permitiría estimar la localización en zonas de sombra ya que no requiere ninguna referencia externa, y permitiría también aumentar la precisión. Su inicialización, en estos casos, sería sencilla, ya que se podría basar en la última posición medida obtenida del sistema de posicionamiento inalámbrico al que complementa. IV. PRECISIÓN EN LA LOCALIZACIÓN EN INTERIORES En la actualidad existen numeras técnicas que permiten la localización de elementos en entornos indoor. Sin embargo, todas ellas se deben enfrentar a 3 retos principales [26]: − Precisión: La precisión hace referencia a cuán cerca es la posición calculada por la técnica de posicionamiento respecto a la real. La precisión difiere ampliamente de − − unos sistemas a otros y es uno de los aspectos principales a considerar actualmente. Esto es debido a que en la localización indoor se requiere mucha más precisión que en los servicios outdoor. Los errores no deberían exceder alrededor de un metro de error para permitir una diferenciación clara entre pisos, habitaciones u otros elementos de interés. Rango de cobertura: Este parámetro hace referencia al área de funcionamiento de la técnica de posicionamiento, siendo óptimo, en general, áreas amplias que cubran el área total de los edificios en los que se aplican las técnicas en cuestión. Seguridad: Este aspecto está relegado a un segundo plano, ya que solo se ha comenzado a considerar en posicionamiento en redes personales (Personal Networks) [27]. Como ya se ha comentado, uno de los principales retos de los sistemas de posicionamiento en interiores es la precisión de la medida, la cual depende del sistema concreto a emplear. Ésta debe ser elevada ya que una baja precisión en un entorno indoor puede producir detectar la habitación o piso en la que se encuentra un objeto de forma errónea. Como se ha determinado, el “mejor” sistema de localización en interiores sería un híbrido entre un sistema de localización basado en redes WIFI y un sistema de posicionamiento inercial que lo complemente. La precisión en este caso se basaría, por un lado en la precisión de las medidas en base a las redes WIFI y por otro en la precisión en las medidas de los sistemas inerciales del teléfono móvil a emplear, cuyos errores se acumularán a lo largo del tiempo. A. Precisión de los sistemas inalámbricos El principal factor que influye en el error en la medida de estos sistemas es, por un lado, el método de localización empleado. Existen varios métodos [13],[15]: Trilateración: Se basa en estimar la posición de un objeto midiendo las distancias a múltiples puntos de referencia (como mínimo tres). Esta distancia no se mide directamente, sino que se puede medir a partir de otros parámetros como son potencia de señal recibida (RSS, Received Signal Strength), el tiempo de llegada de la señal (TOA, Time of Arrival) o la diferencia de tiempo de llegada (TDOA, Time Difference of Arrival), y el tiempo de ida y vuelta de la señal (RTOF, Roundtrip time of flight). − TOA: Como la distancia es proporcional al tiempo de propagación de las ondas (a la velocidad de la luz), midiendo el tiempo de ida de la señal del transmisor al receptor se puede estimar la posición relativa del receptor. Los principales problemas es que requiere que transmisores y receptores estén sincronizados y que se transmita un timestamp que permita determinar el tiempo de ida de la señal. − − − TDOA: A diferencia de TOA, se basa en medir la diferencia de tiempo en que una señal llega a varios sensores. Correlando dicha información, se puede estimar la posición relativa a los mismos. RTOF: Se basa en realizar una medida del tiempo de ida y vuelta, por lo que ya no es necesaria una alta sincronización entre transmisor y receptor, ya que en base a un timestamp se analiza cuándo se recibe la señal previamente enviada. RSS: Soluciona el principal problema que presentan TOA, TDOA y RTOF, que está basado en la falta de visión directa y el alto multitrayecto existente en estos entornos que puede provocar que los tiempos medidos estén afectados y sean poco precisos. Este método se basa en estimar la posición relativa a un transmisor en función de la potencia de señal recibida. Para ello se pueden usar modelos teóricos y empíricos que estimen las curvas de potencia de señal recibida en cada punto, o se pueden realizar “mapas de potencia” en base a medidas reales realizadas previamente, lo que aumentaría la precisión de este método. Triangulación: Se basa en estimar la posición de un objeto midiendo el ángulo recibido (POA, Phase of Arrival), o la dirección de llegada de las señales (DOA, Direction of Arrival). En ambos métodos los transmisores emiten señales sinusoidales puras de la misma frecuencia y fase, lo que permite determinar las fases de las señales recibidas correlando todas ellas. En estos casos, al igual que TOA, TDOA y RTOF, debido a la falta de visión directa existente en entornos indoor, la medida de la fase recibida es ambigua, provocando errores en la medida. Análisis del entorno: Se basa en algoritmos varios en los que primero se miden determinadas características del entorno (que son proporcionales a localización) en el que realizar la localización y después, en tiempo real, se estima la localización mediante la determinación del punto previamente medido más cercano en base al parámetro en cuestión. Existen varios métodos [8]: métodos probabilísticos, KNN (K-Nearest-Neighbor), redes neurales, SVM (Support Vector Machine) y SMP (Smallest Mvertex Polygon), cuyas características específicas no son objeto del presente estudio. Proximidad: Estos sistemas se basan en el concepto sencillo de ver cuál es el transmisor (o sensor) más cercano, según el nivel de potencia recibido. Si solo recibe señal de uno, está en su zona de trabajo; si recibe de más, estará en la zona del transmisor del que recibe un nivel de potencia superior. Un ejemplo claro de ello es la localización en base a identificación de celdas (Cell-ID), en el que conociendo la celda que el receptor usa, se puede estimar la posición del usuario. El principal inconveniente de estos métodos es que no son adecuados para recepción en interiores, ya que la precisión es bastante baja. De entre todos estos métodos, el más sencillo de implementar y que asegura un correcto funcionamiento (y una mayor precisión en entornos de interiores) es el basado en la trilateración de RSS combinada con el análisis del escenario previo que permita realizar un mapa de potencias. De esta forma, la precisión en las medidas dependerá en gran medida del número de puntos existentes en el mapa, de forma que cuántos más medidas previas se realicen, con mayor exactitud de estimará la posición del usuario. Por otro lado, el método teórico empleado para realizar las estimaciones de potencia tiene una gran influencia en la exactitud de las medidas, ya que en entornos de interior, los modelos de canal comúnmente empleados (Rayleigh, COST…) no son los más adecuados, siendo necesarios, realizar estimaciones RSS con modelos de canal específicos de entornos indoor [28]. Actualmente, existen numerosas alternativas y estudios de sistemas de posicionamiento en interiores basados en redes WIFI, la mayor parte de los cuales se basan en medida de RSS combinadas en algunas ocasiones con análisis del entorno previo. Algunos de ellos son: − − − − − Microsoft RADAR [29], basado en un método similar al KNN de análisis del entorno y que emplea modelos de canal WAF (Wall Attenuation Factor) y FAF (Floor Attenuation Factor) para aplicar el método RSS. Su precisión es de 3-5m. Sistema Horus [30], basado en el método probabilístico de análisis del entorno combinado con RSS y con una precisión de más de 2m en el 90% de los casos. Ekahau [31], basado también en métodos probabilísticos y RSS aumenta la precisión hasta 1m. DIT [32], basado en redes neurales determinan que su precisión empleando RSS es de hasta 1.5m en el 75% de los casos. PlaceLab [33], que hace uso de bases de datos con información previa y combinada la señal de WIFI con señales de telefonía móvil. Su precisión es de unos 3m. Como se ha comentado, el método concreto empleado a la hora de determinar la localización del usuario tiene influencia en la precisión de la medida. Sin embargo, el receptor WIFI concreto que se emplee también tendrá un error en las medidas realizadas, que provocará un error en la localización del usuario. Este error dependerá en gran medida de la sensibilidad (ruido interno del dispositivo) del sensor WIFI concreto a emplear. De esta forma, cuando el ruido interno del sensor es muy bajo, se podrán detectar señales de menor potencia y con ello se amplía el área de cobertura. De esta forma, la precisión y eficacia de las medidas aumenta, ya que se detectan potencias más pequeñas sin ser influenciadas por el ruido interno. Por otro lado, el posicionamiento WIFI puede provocar numerosos errores debidos a causas diversas como pueden ser el cambio de referencia de los transmisores WIFI. Para ello, se puede optar por estimar las posibles localizaciones en las que podría encontrarse el elemento móvil en el momento t+1, una vez conocida la posición en el momento t [34]. De esta forma, se compara la posición predicha con la real y se estima si se ha producido o no un error en la localización. Sin embargo, es difícil predecir con precisión la localización futura, para lo cual se podría desarrollar algoritmos que hagan uso de los sistemas inerciales, que dan información de movimiento y orientación. B. Precisión de los sistemas inerciales Las principales causas de pérdida de precisión en los sistemas inerciales son debidas a los propios errores de los sensores empleados, de forma que la falta de precisión de sus medidas (aceleración, orientación, giro…) se traduce en falta de precisión en la posición estimada, y por lo tanto en errores en la medida [35], [36]. Acelerómetro: Un acelerómetro es un dispositivo que mide la aceleración de un elemento. No está necesariamente relacionado con el cambio de velocidad, sino que a veces se asocia con el fenómeno de peso experimentado por una masa de referencia conocida por el dispositivo de medida. Generalmente, el acelerómetro mide la aceleración mediante la medida de cuánto presiona la masa sobre algo cuando una fuerza actúa sobre ella. La fuente de error principal de un acelerómetro es el “bias” (m/s2) (offset de la señal de salida sobre el valor real), el cual difiere de cada acelerómetro concreto. Un error de bias constante de valor ε provoca un error en la posición que al ser doblemente integrado supone un crecimiento cuadrático a lo largo del tiempo. El error acumulado a lo largo del tiempo en la posición estimada es: s(t) = ε * t2 /2, siendo t el tiempo en el que se considera. Es posible estimar el valor del error bias mediante una medida del valor medio de la salida del acelerómetro a largo plazo cuando no se experimenta ninguna aceleración. Con ello, se puede recalibrar la medida de aceleración periódicamente, de forma que el error se reduzca. Los errores de bias no corregidos son los que limitan, principalmente, el rendimiento del sistema inercial de localización. Giroscopio: Un giroscopio es un dispositivo de medida de la orientación, basado en los principios de conservación del momento angular. Un giroscopio convencional suele ser mecánico, y consiste en 3 ruedas giratorias montada en un eje de simetría, permitiéndole la rotación en los 3 ejes. Cuando el giróscopo se somete a un cambio de orientación de su eje, cambia de orientación (o experimenta un momento angular) girando respecto de un tercer V. eje, perpendicular tanto a aquel respecto del cual se lo ha empujado a girar, como a su eje de rotación inicial. SISTEMA REAL DE POSICIONAMIENTO A. Sistema operativo Android En los teléfonos móviles, por el contrario se emplean la tecnología MEMS (Micro Electro-Mechanical System), que mide el cambio angular y con ello el giro. Los giroscopios de tecnología MEMS contienen elementos vibrantes que miden el efecto Coriolis, que permite calcular la velocidad angular mediante la medida de rotación en diferentes ejes. En el giroscopio, al igual que en el acelerómetro, la fuente de error principal es el “bias”, que es el offset entre la medida de orientación indicada y la real cuando no se está realizando ningún giro. Un error de bias constante de valor ε provoca un error en la medida que crece linealmente a lo largo del tiempo. El error acumulado a lo largo del tiempo es: Ө(t) = ε * t, siendo t el tiempo en el que se considera. Es posible estimar el valor del error bias mediante una medida del valor medio de la salida del giroscopio a largo plazo cuando no se experimenta ninguna rotación. Una vez conocida, es fácil corregir las medidas de salida, simplemente restándosela al valor medido. Magnetómetro (brújulas): Android [37] es un sistema operativo de código abierto basado en Linux para ser empleado en smartphones o tabletas. Fue desarrollado desde 2005 por Andoid Inc, empresa posteriormente comprada por Google, pero el primer smartphone con Android no fue vendido hasta 2008. Su principal característica es que su núcleo está programado en C y C++, y puede ser modificado y compilado para crear sistemas personalizados. Las aplicaciones para ejecutarse en este sistema operativo pueden ser programadas directamente en C, o en el lenguaje actualmente más extendido java a través de Andoid SDK. B. Aplicación de posicionamiento “Look!” [38] es un framework de realidad aumentada para Android que cuenta con varios módulos con diversas funciones, entre los que se encuentra un módulo de localización. Este framework ha sido desarrollado por un alumno de la Universidad Complutense de Madrid en el año 2011 y cuenta con licencia GPL v3 y con la posibilidad de ser ampliado. Un magnetómetro es un instrumento para medir la fuerza y dirección del campo magnético en el área cercano al dispositivo. En los dispositivos móviles, en general, se emplean magnetómetros vectoriales, que tienen la capacidad de medir la componente de campo magnético en una determinada dirección relativa a la orientación espacial del propio dispositivo. El módulo de localización de Look!, combina un módulo de navegación basado en WIFI, que proporciona la localización básica, y un módulo inercial secundario que aumenta la precisión de la localización básica basada en WIFI. Las fuentes principales de errores de medida de este dispositivo son la contaminación magnética del sensor y la presencia de elementos férreos en el instrumento. Este error es o bien intrínseco de la fabricación o bien del estado o entorno en el que se encuentra el dispositivo, por lo que es difícil de corregir. Sin embargo, mediante medidas a largo plazo en una situación estática, se puede estimar cuál es el error en la medida y corregirlo en la salida. Este subsistema, basado en una combinación de mapas de potencia WIFI RSS combinado con un análisis del entorno, tiene tres fases que se indican en la Figura 1: Teniendo todo esto en cuenta, se determina que el uso de sensores inerciales para realizar localizaciones puede llevar a numerosos errores, ya que los errores son acumulativos y crecen, en algunos casos exponencialmente, a lo largo del tiempo. Por ello, es muy importante llevar a cabo una correcta calibración de todos los sensores a emplear y realizar reinicializaciones periódicas siempre que sea posible para que el error sea mínimo. De esta forma, se convierten en una buena alternativa para complementar a otros sistemas de posicionamiento. Figura 1: Diagrama de flujo del sistema de navegación basado en WIFI de Look!. Subsistema basado en WIFI: − − Planificación, basada en determinar por un lado los puntos de acceso fijos a emplear por Look, y por otro lado, se determinan cuáles son las posiciones relevantes dentro del escenario indoor concreto donde posicionarse. Captura de datos, en el cual se realiza un mapa de la señal WIFI recibida en los nodos relevantes y desde los puntos de accesos definidos en el paso previo (método RSS). Cuantos más nodos relevantes se definan, más información habrá en el mapa WIFI y más precisa será la medida de localización. Para eliminar los posibles errores en el mapa WIFI, se mide la potencia durante diversos períodos de tiempo. − Localización, en la cual se realizan escaneos de las potencias WIFI actuales (en tiempo real) de cada uno de los puntos de acceso definidos y mediante una serie de algoritmos varios se determina cuál es el nodo relevante más parecido al actual (análisis del entorno). Como ya se ha comentado teóricamente, la principal fuente de error en este tipo de subsistema de posicionamiento, es la falta de medidas del mapa WIFI, de forma que para obtener resultados muy precisos es necesario tener muchos nodos relevantes y realizar una larga tarea de planificación y captura de datos previa. Lo óptimo consiste en obtener un compromiso entre tiempo de medición previo (planificación y captura de datos) y precisión necesaria dependiendo de la aplicación concreta. Por otro lado, se puede aumentar la precisión de las medidas sin necesidad de aumentar ampliamente la captura de datos previa, mediante el uso de herramientas de simulación de propagación. De esta forma, se puede medir la potencia WIFI real recibida en determinados nodos relevantes, y se puede estimar en base a ellos y a diferentes modelos de canal indoor, cuál es la potencia en muchos otros puntos cercanos. De esta forma, la precisión aumentará. Por otro lado, el algoritmo concreto de análisis del entorno empleado también influirá en la precisión de la medida realizada. Look! emplea “Closest Neighbour”, que obtiene buenos resultados cuando hay un punto de acceso cercano [38]. Sin embargo, cuando no hay un punto de acceso se producen errores en la localización, que podrían ser corregidos mediante métodos más complejos, como son las redes neuronales. desviación estándar y se compara con un umbral. Cuando es superior, el dispositivo se mueve, sino el dispositivo está quieto. En este caso, las principales fuentes de error teóricas son la calidad de los sensores empleados, de forma que a mayor calidad del sensor (menor ruido interno) mayor precisión en la medida obtenida; y el período de actualización de las medidas, es decir, cada cuánto tiempo se programan los eventos del giroscopio y del acelerómetro. El período de actualización en este caso viene determinado por el propio sistema operativo Android, y los valores medios de actualización de eventos es de 1.2 y 20 ms para el giroscopio y el acelerómetro respectivamente [35]. Por otro lado, tal y como se ha determinado teóricamente, es importante tener en cuenta las calibraciones de los sensores, y determinar un período de reinicialización que sea un compromiso entre tiempo de cálculo y precisión necesaria en la medida de localización. VI. PRUEBAS DE PRECISIÓN Las pruebas de precisión del sistema Look se han realizado sobre un teléfono Nexus [39]. La Figura 3 muestra cuáles han sido los ejes considerados en la realización de las pruebas. Además, como también se ha comentado teóricamente, el sensor WIFI concreto que posea el dispositivo a emplear afectará a la precisión de las medidas obtenidas. Subsistema inercial: La localización mediante el sistema inercial en Look! se realiza principalmente mediante el uso del acelerómetro y el giroscopio. El procedimiento se indica en la Figura 2. Figura 3: Posicionamiento de los ejes en las pruebas de precisión A. Precisión de los sistemas inerciales En primer lugar, se ha medido mediante una aplicación software ad-hoc, cuál es la precisión de los sensores inerciales (acelerómetro y giroscopio), con el objetivo de determinar el error de precisión básico del subsistema inercial por utilizar este dispositivo concreto [35]. Para ello se han definido 2 escenarios de prueba concretos: Figura 2: Diagrama de flujo del sistema de navegación inercial de Look!. Periódicamente se producen eventos por parte del giroscopio para actualizar la orientación o dirección, y por parte del acelerómetro, para permitir determinar si existe o no movimiento. Para determinar si el usuario de mueve, se deben almacenar las “N” últimas lecturas del acelerómetro, calcular su − − Escenario 1: El móvil permanece en reposo horizontal sobre una mesa. Escenario 2: El móvil se mantiene quieto y horizontal sobre la palma de la mano de un individuo que se desplaza en hacia el norte a velocidad constante durante 10s. La Tabla I resume los resultados medianos obtenidos de todas las medidas de los eventos ocurridos a lo largo del tiempo de medida indicado en cada escenario. TABLE I MEDIDAS DE PRECISIÓN DEL SISTEMA INERCIAL Escenario Acelerómetro (m/s2) X Y Z 1 0.12 -0.45 9.41 2 0.68 1.38 9.72 Escenario Algunas soluciones propuestas en [35] para aumentar la precisión de los sistemas inerciales son: − Giroscopio (rad/s) X Y Z 1 0.001 0.006 -0.006 2 -0.1 -0.1 -0.1 El escenario 1, en el que el móvil permanece en reposo, nos indica que los sensores inerciales del teléfono móvil en el que se realizan las pruebas tienen un error de medida inicial. Estas medidas sirven para realizar una calibración inicial del sistema, de forma que las medidas leídas por dichos sensores cuando se produce un evento deben ser corregidas con los valores incluidos en la Tabla I. La aceleración obtenida en base al acelerómetro debería ser 0 m/s2 en los ejes X e Y, mientras que debería ser 9.81 m/s2 en el eje Z, debido a que el acelerómetro se basa en la lectura de las fuerzas sobre la masa del dispositivo, y en el eje Z está afectado por la gravedad. Las medidas obtenidas son los errores de bias del acelerómetro en los tres ejes. En el caso de las medidas de orientación con el giroscopio, el escenario 1 también permite determinar el error de bias en los tres ejes, con los cuales calibrar las medidas y evitar errores a largo plazo. Considerando los resultados obtenidos por el acelerómetro en el escenario 2, se observa que la mayor aceleración es en el eje Z, ya que está nuevamente afectado por la gravedad. Sin embargo, se detectan picos de caída de aceleración en este eje, que pueden ser debidos mayormente a la fuerza que supone el impacto de un paso sobre el dispositivo. El eje y muestra la aceleración en la dirección del movimiento, mientras que el eje x muestra alguna componente de la aceleración del movimiento, ya que el móvil no se mantiene perfectamente horizontal en todo momento durante las pruebas. Si el móvil estuviera idealmente horizontal, la aceleración leída en el eje X sería la misma que en reposo, y equivalente al error de medida. En el caso del giroscopio, el escenario 2 no aporta ningún resultado concluyente. Con estos estudios, se ha determinado que los sensores inerciales a emplear en Look! tienen un error de precisión inicial (bias), que debe ser corregido periódicamente; en especial el error del giroscopio que aumenta cuadráticamente con el tiempo. Para ello debe eliminarse el offset inicial medido. Una vez corregidos los errores, la precisión instantánea en la medida es alta. Sin embargo, con el tiempo el error en la medida aumentará, ya que estos errores son acumulativos y se requerirá una nueva reinicialización de las referencias, considerando de nuevo el error inicial recogido en la Tabla I. − Detección de pasos: El acelerómetro experimenta “picos de aceleración” cuando se produce un paso, de forma que se puede detectar si el dispositivo está quieto (no hay picos de aceleración) o si está en movimiento (hay picos). La detección de pasos en base a la señal del acelerómetro podría completar la información de los sensores inerciales, dando una nueva fuente basada en la longitud de los pasos en el tiempo, lo que permite estimar la velocidad, y con ello, la localización. Limitar la velocidad máxima:. Debido a que el acelerómetro presenta un offset que crece con el tiempo, la velocidad pasa a ser muy alta y con ello se producen errores en el posicionamiento. Sabiendo que un individuo tiene una velocidad máxima media de alrededor 2 m/s, se establece dicho límite, de forma que la aceleración no crezca más que hasta dicha velocidad. B. Precisión del sistema basado en WIFI En segundo lugar, se lleva a cabo un análisis de la precisión de medida de potencia recibida de cada uno de los puntos de acceso existentes. Como sólo se cuenta con un punto de acceso para realizar las pruebas, se sitúa el dispositivo móvil en tres puntos diferentes: − − − Punto 1: El móvil se sitúa en la misma habitación que el punto de acceso. Punto 2: El móvil se sitúa en una habituación contigua a la del punto de acceso. Punto 3: El móvil se sitúa en una habitación alejada de la del punto de acceso. Mediante la aplicación Wi-Fi Manager de Android [40], se puede obtener directamente las lecturas de RSSI (Received Signal Strength Indicator). Los valores de potencia se monitorizan durante 10s, obteniéndose los resultados recogidos en la Tabla II. TABLE II MEDIDAS DE PRECISIÓN DEL SISTEMA BASADO EN WIFI EN DIFERENTES LOCALIZACIONES Potencia (dBm) Puntos Mediana Desviación 1 -41 3.65 2 -62 1.74 3 -71 1.51 En general, la desviación y con ello el error de precisión de la medida de potencia de la señal WIFI por parte del dispositivo concreto es mayor cuanto más cerca del punto de acceso nos encontramos (mayor es la potencia recibida). Es importante conocer estos errores en la precisión porque pueden traducirse en errores en la localización basada en WIFI. El error en la medida de potencia por parte del sensor WIFI puede ser de hasta alrededor del 2.5%. Este error es difícil de corregir, ya que depende de la sensibilidad del sensor WIFI concreto, de la antena y del propio punto de acceso. Por otro lado, las variaciones de potencia recibida a lo largo del tiempo también pueden deberse a los cambios en el canal de propagación. Los entornos indoor son bastante “cambiantes” en cuanto a propagación, ya que el paso de personas andando puede modificar el canal de una forma desconocida. La Tabla III resume las medidas realizadas en la habitación contigua al punto de acceso en cinco situaciones diferentes. − − − − − Situación 1: No hay ninguna persona más en la habitación en la que se encuentra el móvil. Situación 2: Hay una persona en la habitación en la que se encuentra el móvil. Situación 3: Hay una persona en la habitación en la que se encuentra el punto de acceso. Situación 4: Hay una persona en la habitación en la que se encuentra el móvil y otra en la del punto de acceso. Situación 5: Hay una persona andando en otra habitación diferente. TABLE III MEDIDAS DE PRECISIÓN DEL SISTEMA BASADO EN WIFI EN DIFERENTES SITUACIONES SEGÚN PERSONAS CERCANAS Como se observa, dependiendo las personas que se encuentren en cada habitación, las medidas de potencia varían, y con ello el error que se produce en los mapas de potencia WIFI que están medidos en momentos determinados. S En este caso, el error en la medida media de potencia debido a la presencia o no de personas en el momento de la medida con respecto a la situación del mapa es de hasta el 15%. Este error es difícil de corregir, ya que el entorno indoor concreto es muy difícil de repetir. Por ello, se puede reducir este error mediante la predicción de campo mediante canales de propagación típicos de entornos indoor, que podrían complementar los mapas de potencia WIFI creados tradicionalmente. Además, hay otra posible causa que provoca variabilidad de la potencia de señal recibida. El “Oeste” es la orientación concreta de la antena del dispositivo móvil. La Tabla IV resume las medidas realizadas para 4 orientaciones diferentes en la habitación continua a la del punto de acceso. El Oeste es la orientación donde se encuentra el punto de acceso. TABLE IV MEDIDAS DE PRECISIÓN DEL SISTEMA BASADO EN WIFI EN DIFERENTES SITUACIONES SEGÚN LA ORIENTACIÓN DEL DISPOSITIVO Potencia (dBm) Orientación Mediana Desviación Norte -52 1.56 Sur -48 1.68 Oeste -42 2.69 Este -72 1.32 En este caso los errores en la medida de la potencia de WIFI pueden superar el 50%. Para evitar este último elevado error es importante realizar mapas de potencia WIFI en los que en los nodos relevantes donde se tomen muestras en las 4 orientaciones. De esta forma, en el momento de aplicar el método de análisis del entorno, combinando la información de RSSI obtenida y la orientación del giroscopio, la precisión aumentará. Potencia (dBm) Situación Mediana Desviación 1 -43 2.84 2 -51 1.74 3 -48 1.87 4 -50 1.85 5 -42 2.74 VII. CONCLUSIONES En el presente artículo se ha llevado a cabo un detallado análisis del estado del arte en cuanto a sistemas de posicionamiento de interiores se refiere, de forma que se ha estudiado su evolución histórica, definiendo las ventajas y desventajas principales de cada uno de ellos. Se ha determinado que una combinación basada en sistemas inalámbricos (especialmente WIFI) en combinación con los sistemas inerciales disponibles en la mayoría de los smartphones es la mejor alternativa para conseguir la máxima precisión en la localización en interiores. A continuación se ha llevado a cabo un estudio teórico de la precisión de ambos sistemas, de forma que se han detectado las principales fuentes de error en la medida y se han sugerido algunas posibles soluciones cuando es posible. En el caso de los sistemas basados en WIFI, la mayor fuente de error es la variabilidad de la señal recibida y la falta de información en los mapas de potencia WIFI recibida. En el caso de los sistemas inerciales, la principal fuente de error es el bias, u offset inicial, que equivale a un error de precisión que se acumula a lo largo del tiempo y que puede provocar grandes errores en la localización. Finalmente, se ha analizado un caso concreto que combina los sistemas WIFI e inerciales para el posicionamiento en indoor: Look!, midiendo el error que se presenta en ambos sistemas y sugiriendo posibles soluciones concretas. En el caso de los sistemas basados en WIFI, el error se debe por la variabilidad de la potencia en general, debido a la presencia de personas alrededor o por la orientación del dispositivo móvil, que provocan cambios en la potencia recibida, que pueden provocar diferencias con los mapas de potencia y con ello, errores de localización. En el caso del componente inercial, los errores de bias son “considerables” y deben ser corregidos para que no se acumulen a lo largo del tiempo. REFERENCES [1]http://en.wikipedia.org/wiki/Global_Positioning_System [2]S. A. Dale and P. Daly, "The Soviet Union's GLONASS Navigation Satellites." IEEE Aerospace and Electronic Systems Magazine pp. 13-17, 1987. [3]http://es.wikipedia.org/wiki/Sistema_de_navegaci%C3%B 3n_Galileo [4]http://www.ekahau.com/ [5]http://research.microsoft.com/pubs/64611/pervasive-­‐ placelab-­‐2005-­‐final.pdf [6]http://web.cs.wpi.edu/~emmanuel/courses/cs525m/S06/ slides/herecast_wk10.pdf [7]Glanzer, G., Bernoulli, T., Wiessflecker, T., & Walder, U., “Semi-autonomous indoor positioning using MEMS-based inertial measurement units and building information”. IEEE 6th Workshop on Positioning, Navigation and Communication (WPNC 2009). (pp. 135-139), March 2009. [10]A. Martínez, “Realidad Aumentada en Interiores. Posicionamiento del usuario en dispositivos móviles y aplicaciones en rehabilitación y guiado (GuIAR). Trabajo Fin de Máster. Máster Universitario en Software y Sistemas. Facultad de Informática. Universidad Politécnica de Madrid. 2013. [11]Sung Hyun Jang, “A QR Code-based Indoor Navigation System Using Augmented Reality”, Conference on Geographic Information Science, USA, 2012. [12]A. Mulloni, D. Wagner, I. Barakonyi, D. Schmalstieg, “Indoor Positioning and Navigation with Camera Phones”, IEEE Pervasive Computing (Volume:8, Issue: 2, Pages: 2231), June 2009. [13]Hui Liu, Houshang Darabi, Pat Banerjee, and Jing Liu, “Survey of wireless indoor positioning techniques and systems”, IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, (Volume:37, Issue: 6, Page:1067-1080). Nov 2007. [14]Dr. Rainer Mautz, “Indoor Positioning Technologies. Application for Venia Legendi in Positioning and Engineering Geodesy”, Habilitation Thesis submitted to ETH Zurich, Feb. 2012. [15]G. Mao, B. Fidan, and B. Anderson, “Wireless sensor network localization techniques,” Computer Networks, vol. 51, no. 10, pp. 2529 – 2553, July, 2007. [16]Hae Don Chon, Sibum Jun, Heejae Jung, Sang Won An, “Using RFID for Accurate Positioning”, Positioning Vol.1 No.8, December 2004. [17]Weyn, Maarte and Schrooyen, Frederik, “A WiFi Assisted GPS Positioning Concept”, ECUMICT, Gent, Belgium, 2008. [18]Hallberg, Nilsson, M. ; Synnes, K., “Positioning with Bluetooth”, 10th International Conference on Telecommunications, 2003. ICT 2003 [19]Borenovic, M.N, Simic, M.I., Neskovic, A.M., Petrovic, M.M., “Enhanced Cell-ID + TA GSM Positioning Technique”, The International Conference on Computer as a Tool, 2005 (EUROCON 2005) (Volume:2 ), Nov. 2005. [20]Z Sahinoglu, S Gezici, I Guvenc, “Ultra-wideband positioning systems”, Cambridge, 2008. [21]http://en.wikipedia.org/wiki/Inertial_navigation_system [8]Strömbäck, P., Rantakokko, J., Wirkander, S. L., Alexandersson, M., Fors, K., Skog, I., & Händel, P, “Footmounted inertial navigation and cooperative sensor fusion for indoor positioning”. In Proc. ION., January 2010. [22]Jochen Seitz, Thorsten Vaupel, Steffen Meyer, Javier Gutiérrez Boronat and Jörn Thielecke, “A hidden markov model for pedestrian navigation”, Workshop on Positioning, Navigation and Communication, 2010. [9]Laia Descamps-Vila, A. Pérez-Navarro y Jordi Conesa, “Integración de un sistema de posicionamiento indoor en aplicaciones SIG para dispositivo móvil”, VII JORNADAS DE SIG LIBRE. Universidad de Girona (España), 2013. [23]F Li, C Zhao, G Ding, J Gong, C Liu, “A reliable and accurate indoor localization method using phone inertial sensors”, Proceedings of the 2012 ACM Conference on Ubiquitous Computing (UbiComp '12), New York 2012. [24]Robert Harle, “A Survey of Indoor Inertial Positioning Systems for Pedestrians”, IEEE Communications Surveys & Tutorials, Vol. 15, N. 3, 2013. [25] Frederic Evennou and FrançoisMarx, “Advanced Integration of WiFi and Inertial Navigation Systems for Indoor Mobile Positioning”, Journal on Applied Signal Processing Volume 2006,Pages 164-164, January 2006. [26]K. Al Nuaimi and H. Kamel, “A survey of indoor positioning systems and algorithms”, 2011 International Conference on Innovations in Information Technology, pp. 185–190, 2011. [27]Y. Gu, A. Lo, S. Member, and I. Niemegeers, “A survey of Indoor Positioning Systems for Wireless Personal Networks”, IEEE Communications surveys & tutorials, vol. 11, no. 1, pp. 13–32, 2009. [28]Atreyi Bose and Chuan Heng Foh, “A Practical Path Loss Model For Indoor WiFi Positioning Enhancement”, 6th International Conference on Information, Communications & Signal Processing, 2007. Singapore, Dec. 2007. [29]http://research.microsoft.com/en-­‐ us/projects/radar/ [30]Moustafa Youssef and Ashok Agrawala, “The Horus WLAN Location Determination System”, 3rd international conference on Mobile systems, 2005 [31]http://www.ekahau.com [32]Pedro Claro and Nuno Borges Carvalho, “Local Positioning System Based on Artificial Neural Networks”, Artificial Neural Networks–ICANN 2007. Android”, Proyecto de Sistemas Informáticos. Universidad Complutense de Madrid. 2010/2011. [39]http://www.google.es/nexus/ [40]http://developer.android.com/reference/android/net/wifi/Wi fiManager.html [28]Atreyi Bose and Chuan Heng Foh, “A Practical Path Loss Model For Indoor WiFi Positioning Enhancement”, 6th International Conference on Information, Communications & Signal Processing, 2007. Singapore, Dec. 2007. [29]http://research.microsoft.com/en-­‐ us/projects/radar/ [30]Moustafa Youssef and Ashok Agrawala, “The Horus WLAN Location Determination System”, 3rd international conference on Mobile systems, 2005 [31]http://www.ekahau.com [32]Pedro Claro and Nuno Borges Carvalho, “Local Positioning System Based on Artificial Neural Networks”, Artificial Neural Networks–ICANN 2007. [33]T Sohn, WG Griswold, J Scott, A “Experiences with place lab: an open source location-aware computing”, Proceedings of international conference on Software engineering 471 (ICSE '06), 2006. LaMarca, toolkit for the 28th Pages 462- [34]Y Tsuda, Q Kong, T Maekawa, “Detecting and correcting WiFi positioning errors”, Proceedings of the 2013 ACM international joint conference on Pervasive and ubiquitous computing Pages 777-786, 2013 LaMarca, toolkit for the 28th Pages 462- [35]Ubejd Shala and Angel Rodriguez, “Indoor Positioning using Sensor-fusion in Android Devices”, School of Health and Society. Department Computer Science Embedded Systems, Sep. 2011. [34]Y Tsuda, Q Kong, T Maekawa, “Detecting and correcting WiFi positioning errors”, Proceedings of the 2013 ACM international joint conference on Pervasive and ubiquitous computing Pages 777-786, 2013 [36]Shahid Ayub, Alireza Bahraminisaab, Bahram Honary, “A Sensor Fusion Method for Smart phone Orientation Estimation”, Proceedings of the 13th Annual Post Graduate Symposium on the Convergence of Telecommunications, Networking and Broadcasting, Liverpool. 2012. [33]T Sohn, WG Griswold, J Scott, A “Experiences with place lab: an open source location-aware computing”, Proceedings of international conference on Software engineering 471 (ICSE '06), 2006. [35]Ubejd Shala and Angel Rodriguez, “Indoor Positioning using Sensor-fusion in Android Devices”, School of Health and Society. Department Computer Science Embedded Systems, Sep. 2011. [36]Shahid Ayub, Alireza Bahraminisaab, Bahram Honary, “A Sensor Fusion Method for Smart phone Orientation Estimation”, Proceedings of the 13th Annual Post Graduate Symposium on the Convergence of Telecommunications, Networking and Broadcasting, Liverpool. 2012. [37]Burnette, E., “Hello, Android: introducing Google's mobile development platform”. Pragmatic Bookshelf, 2009. [38]Sergio Bellón S., Creixell J., y Serrano A., “Look!: Framework para Aplicaciones de Realidad Aumentada en [37]Burnette, E., “Hello, Android: introducing Google's mobile development platform”. Pragmatic Bookshelf, 2009. [38]Sergio Bellón S., Creixell J., y Serrano A., “Look!: Framework para Aplicaciones de Realidad Aumentada en Android”, Proyecto de Sistemas Informáticos. Universidad Complutense de Madrid. 2010/2011. [39]http://www.google.es/nexus/ [40]http://developer.android.com/reference/android/net/wifi/Wi fiManager.html [28]Atreyi Bose and Chuan Heng Foh, “A Practical Path Loss Model For Indoor WiFi Positioning Enhancement”, 6th International Conference on Information, Communications & Signal Processing, 2007. Singapore, Dec. 2007. [29]http://research.microsoft.com/en-­‐ and Society. Department Computer Science Embedded Systems, Sep. 2011. us/projects/radar/ [30]Moustafa Youssef and Ashok Agrawala, “The Horus WLAN Location Determination System”, 3rd international conference on Mobile systems, 2005 [31]http://www.ekahau.com [32]Pedro Claro and Nuno Borges Carvalho, “Local Positioning System Based on Artificial Neural Networks”, Artificial Neural Networks–ICANN 2007. [33]T Sohn, WG Griswold, J Scott, A “Experiences with place lab: an open source location-aware computing”, Proceedings of international conference on Software engineering 471 (ICSE '06), 2006. LaMarca, toolkit for the 28th Pages 462- [34]Y Tsuda, Q Kong, T Maekawa, “Detecting and correcting WiFi positioning errors”, Proceedings of the 2013 ACM international joint conference on Pervasive and ubiquitous computing Pages 777-786, 2013 [35]Ubejd Shala and Angel Rodriguez, “Indoor Positioning using Sensor-fusion in Android Devices”, School of Health [36]Shahid Ayub, Alireza Bahraminisaab, Bahram Honary, “A Sensor Fusion Method for Smart phone Orientation Estimation”, Proceedings of the 13th Annual Post Graduate Symposium on the Convergence of Telecommunications, Networking and Broadcasting, Liverpool. 2012. [37]Burnette, E., “Hello, Android: introducing Google's mobile development platform”. Pragmatic Bookshelf, 2009. [38]Sergio Bellón S., Creixell J., y Serrano A., “Look!: Framework para Aplicaciones de Realidad Aumentada en Android”, Proyecto de Sistemas Informáticos. Universidad Complutense de Madrid. 2010/2011. [39]http://www.google.es/nexus/ [40]http://developer.android.com/reference/android/net/wifi/Wi fiManager.html 17/06/2014 Máster Universitario en Software Libre Trabajo Final de Máster de Investigación Error en el posicionamiento indoor en dispositivos móviles Cristina Regueiro Senderos Junio 2014 Índice Introducción Objetivos Sistemas de posicionamiento en interiores Precisión en la localización en interiores Sistema real de posicionamiento Pruebas de precisión Conclusiones 2/30 1 17/06/2014 Introducción Necesidad y utilidad de localizar/posicionarse en interiores ↑↑ Sistemas típicos de outdoor (GPS, GLONASS, Galileo) no válidos en interiores Museos Museos, centros comerciales comerciales, hospitales hospitales… Alta atenuación Alto multipath Soluciones: Hardware dedicado (sensores, puntos de control…) Costoso Nuevos sistemas de posicionamiento Basados en WIFI // Sistemas inerciales Smartphones actuales Barato ¿Precisión en la medida? 3/30 Índice Introducción Objetivos Sistemas de posicionamiento en interiores Precisión en la localización en interiores Sistema real de posicionamiento Pruebas de precisión Conclusiones 4/30 2 17/06/2014 Objetivos Determinar la precisión de localización de un sistema de posicionamiento basado en señales WIFI y un sistema de posicionamiento inercial en entornos de interiores. Conocer diversos sistemas de posicionamiento para interiores. Determinar fuentes principales de error en la precisión de la posición Analizar un sistema de posicionamiento real basado en WIFI y sensores inerciales. i i l Analizar los errores en la localización que se producen en el caso real. Determinar posibles soluciones que mejoren la precisión 5/30 Índice Introducción Objetivos Sistemas de posicionamiento en interiores Precisión en la localización en interiores Sistema real de posicionamiento Pruebas de precisión Conclusiones 6/30 3 17/06/2014 Sistemas de posicionamiento en interiores Marcadores fijos: Marcadores en puntos conocidos. Típico: Códigos QR, BIDI… QR códigos BIDI Ventajas: Sencillos y baratos; alta precisión Desventajas: Localización discontinua y activa por parte del usuario No son una alternativa a considerar 7/30 Sistemas de posicionamiento en interiores Sistemas inalámbricos: Recepción de señales inalámbricas Posición en base a una referencia referencia. Típico: RFID, WIFI, Bluetooth, redes móviles… Ventajas: Sencillos y baratos de implementar. Desventaja: Hardware específico Smartphones tienen WIFI y Bluetooth Desventaja: Infraestructura de red previa. WIFI implementado en muchos edificios WIFI es una alternativa útil 8/30 4 17/06/2014 Sistemas de posicionamiento en interiores Sistemas inerciales: Solucionan dependencia de infraestructura y hardware específico Se basan en IMU. Conocen distancia y orientación en base a sensores: Acelerómetro Giroscopio Brújula Ventajas: Baratos y presentes en smartphones Desventajas: Calibración inicial y error acumulativo en el tiempo. Sistemas inerciales poco precisos 9/30 Sistemas de posicionamiento en interiores Sistema híbrido propuesto: Sistema de posicionamiento principal basado en WIFI Zonas de sombra de cobertura WIFI Sistema de posicionamiento secundario basado en sensores inerciales Complementa al WIFI en zonas de sombra Aumentar la precisión Reinicialización necesaria: Referencia: última posición obtenida en base a WIFI. 10/30 5 17/06/2014 Índice Introducción Objetivos Sistemas de posicionamiento en interiores Precisión en la localización en interiores Sistema real de posicionamiento Pruebas de precisión Conclusiones 11/30 Precisión en la localización en interiores Precisión Definición: Cuán cerca es la posición calculada respecto a la real. real Difiere entre sistemas. Se requiere alta precisión en posicionamiento indoor Errores pequeños = cambios de habitación, piso... Máximo error: 1 metro. 12/30 6 17/06/2014 Precisión en la localización en interiores Precisión en sistemas basados en WIFI Método de localización empleado (I) Trilateración: posición p en base a la distancia a 3 puntos p de referencia TOA: Distancia según tiempo ida de TX a RX. TDOA: Distancia según diferencias de tiempo a varios sensores. RTOF: Distancia según tiempo ida y vuelta de TX-RX-TX. Desventajas: Multipath y obstáculos Poca precisión RSS: Distancia según potencia recibida Ventajas: Multipath y obstáculos no influyen en la precisión. Triangulación: posición en base a orientación. POA; Distancia según la fase recibida. DOA; Distancia según dirección recibida Desventajas: Multipath y obstáculos Poca precisión 13/30 Precisión en la localización en interiores Precisión en sistemas basados en WIFI Método de localización empleado (II) Análisis del entorno: posición en base a medidas previas. p p Métodos probabilísticos Desventajas: Cambios en el entorno Reducción de precisión Ventajas: La precisión depende directamente del estudio previo Proximidad: posición en zonas de trabajo de transmisores. Cell-ID Desventajas: Poca precisión en interiores Combinación de Trilateración de RSS + análisis del entorno (mapas de potencia WIFI) 14/30 7 17/06/2014 Precisión en la localización en interiores Precisión en sistemas basados en WIFI Sensores WIFI Sensibilidad ((ruido interno)) Influye en las potencias mínimas a detectar en RSS Cambios de referencia de transmisores Determinar posibles localizaciones en base a localizaciones previas. Difícil de implementar Ayuda de sistemas inerciales 15/30 Precisión en la localización en interiores Precisión en sistemas inerciales Acelerómetro: mide la aceleración en base a los cambios de peso Fuente de error principal: “bias” u offset de salida Crecimiento cuadrático con el tiempo: Calibración inicial necesaria Reinicializaciones periódicas. s(t) = error * t2 /2 Giroscopio: mide la orientación en base al momento angular (efecto Coriolis) Fuente de error principal: “bias” bias u offset de salida Crecimiento lineal con el tiempo: s(t) = error * t Calibración inicial necesaria Reinicializaciones periódicas 16/30 8 17/06/2014 Precisión en la localización en interiores Precisión en sistemas inerciales Brújulas (magnetómetro): miden el campo magnético según la dirección. Fuente de error principal: contaminación magnética y presencia de elementos férreos en el dispositivo. Error en fabricación o del entorno Dificil de corregir. Los sensores inerciales pueden provocar errores a largo p g p plazo Calibraciones Reinicializaciones periódicas 17/30 Índice Introducción Objetivos Sistemas de posicionamiento en interiores Precisión en la localización en interiores Sistema real de posicionamiento Pruebas de precisión Conclusiones 18/30 9 17/06/2014 Sistema real de posicionamiento Sistema operativo: Android Código abierto Basado en Linux Android SDK Aplicación de posicionamiento: Look! Framework Realidad Aumentada para Android Módulo de localización (WIFI + sensores inerciales) Los demás módulos son irrelevantes para el presente estudio. PFC de Universidad Complutense de Madrid, 2011. Licencia GPL v3 http://www.lookar.net/ 19/30 Sistema real de posicionamiento Aplicación de posicionamiento: Look! Sistema de posicionamiento basado en WIFI Análisis del entorno con mapas de potencia + RSS 20/30 10 17/06/2014 Sistema real de posicionamiento Aplicación de posicionamiento: Look! Sistema de posicionamiento inercial Acelerómetro + Giroscopio 21/30 Sistema real de posicionamiento Aplicación de posicionamiento: Look! Fuentes de error Fuentes de error: Falta de medidas en el mapa de potencias WIFI (Planificación + Captura Datos) Solución: Compromiso entre tiempo y precisión. Complementar con simulaciones de propagación con modelos de canal específicos de entornos indoor. Fuente de error: Algoritmo de análisis del entorno Solución: Closest Neighbour obtiene buenos resultados. Fuente de error: Sensor WIFI (depende del dispositivo). Fuente de error: Sensores inerciales Solución: Calibración inicial y reinicializaciones periódicas. 22/30 11 17/06/2014 Índice Introducción Objetivos Sistemas de posicionamiento en interiores Precisión en la localización en interiores Sistema real de posicionamiento Pruebas de precisión Conclusiones 23/30 Pruebas de precisión Precisión de sistemas inerciales Error de “bias” Calibración inicial Acelerómetro (m/s2) Giroscopio (rad/s) X Y Z X Y Z Quieto 0.12 0.14 9.41 0.001 0.006 -0.006 Movimiento 0.68 1.38 9.72 -0.1 -0.1 -0.1 Gravedad Aceleración en la dirección del movimiento Error bias >> en acelerómetro Soluciones adicionales: Detección de pasos y límite de velocidad 24/30 12 17/06/2014 Pruebas de precisión WIFI Manager (Android) 10 s Precisión del sistema basado en WIFI Diferentes localizaciones de punto acceso (TX) y receptor Potencia (dBm) Mediana Desviación Misma habitación -41 3.65 Habitaciones contiguas -62 1.74 Habitaciones separadas -71 1.51 A mayor potencia Mayor variabilidad Menor precisión Error alrededor del 2.5% Dificil de corregir Depende del TX y RX concretos 25/30 Pruebas de precisión WIFI Manager (Android) 10 s Precisión del sistema basado en WIFI Presencia de personas alrededor Potencia (dBm) Mediana Desviación Sin personas -43 2.84 Una persona en RX -51 1.74 Una persona en TX -48 1.87 Una persona en TX y RX -50 1.85 U persona en otra Una t habitación h bit ió -42 42 2 74 2.74 Presencia de personas Cambios en canal Cambios de potencia Posicionamiento erróneo Error de alrededor del 15%. Dificil de corregir Entorno indoor cambiante Modelos predicción indoor Precisión aumenta 26/30 13 17/06/2014 Pruebas de precisión Precisión del sistema basado en WIFI WIFI Manager (Android) 10 s Orientación de la antena WIFI Potencia (dBm) Mediana Desviación Norte -52 1.56 Sur -48 1.68 Oeste (TX) -42 2.69 Este -72 1.32 Orientación de la antena Variación en potencia recibida Errores en el posicionamiento Disminuye la precisión Error de alrededor del 50%. Dificil de corregir Mapas de potencia para varias orientaciones del RX 27/30 Índice Introducción Objetivos Sistemas de posicionamiento en interiores Precisión en la localización en interiores Sistema real de posicionamiento Pruebas de precisión Conclusiones 28/30 14 17/06/2014 Conclusiones Análisis detallado del estado del arte de sistemas de posicionamiento indoor Estudio teórico de la precisión de los sistemas WIFI e inerciales Detección de fuentes de error Sugerencia de posibles soluciones Aplicación de los conceptos anteriores en un caso real: Look! Selección de la mejor alternativa de las existentes Híbrido entre posicionamiento WIFI y sistemas inerciales. p Análisis del funcionamiento del sistema: WIFI + acelerómetro + giroscopio Análisis teórico de fuentes principales de error Pruebas de precisión reales Precisión en medidas de potencia WIFI: variabilidad de potencia recibida según localización, entorno y orientación del dispositivo Precisión de sensores inerciales: bias. 29/30 Máster Universitario en Software Libre Trabajo Final de Máster de Investigación Gracias por su atención Cristina Regueiro Senderos Junio 2014 15