Objetiv os
Anuncio

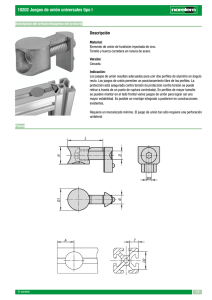
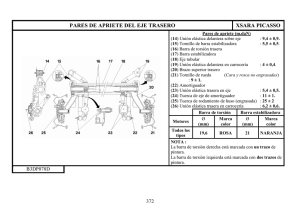
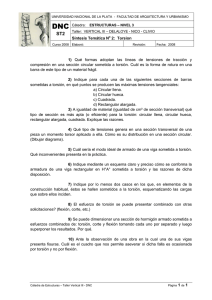
Unidad 6 Objetivos Equilibrio, momento de una fuerza Al término de la unidad, el alumno: • Definir e identificar los brazos de palanca que se generan por la aplicación de fuerzas que se aplican sobre algunos cuerpos. • Calcular el momento de torsión resultante respecto a cualquier eje. • Calcular todas las fuerzas que se aplican a un cuerpo aplicando la segunda condición de equilibrio. • Calcular el centro de gravedad de un cuerpo. • Identificar, definir y calcular un par. Introducción En el estudio de la dinámica y la cinemática se ha considerado siempre a los cuerpos como puntos, de tal manera que la forma en que las fuerzas son aplicadas sobre ellos no ha sido de interés de estudio hasta ahora. En esta unidad se estudiará el movimiento de cuerpos, considerando el punto de aplicación de las fuerzas que actúan sobre él, así como los efectos que estas fuerzas producen sobre el cuerpo. Se analizará el caso en el que diferentes fuerzas no concurrentes se apliquen sobre un mismo cuerpo. Figura 6.1. Muestra un cuerpo sobre el que actúan tres fuerzas no concurrentes. El concepto de par también será tratado en esta unidad. Un par está formado por dos fuerzas paralelas pero con distintas líneas de acción, de igual magnitud, y en sentido contrario. Un par es importante en el estudio de la cinemática de cuerpos rígidos porque, si bien no producen traslación del cuerpo, sí lo hacen rotar. 143 CinemátiCa y dinámiCa Figura 6.2. Muestra un par aplicado a una viga rígida. Por último se estudiará el concepto de centro de gravedad, el cual junto con los temas anteriores, permitirá comprender las condiciones bajo las cuales un cuerpo se halla en equilibrio y rotacional y de traslación. 6.1. Momento o torque de una fuerza Supóngase que se tiene un cuerpo rígido, el cual puede girar alrededor de un eje. Este cuerpo bien puede ser una puerta, una bisagra, una hélice o algo tan complejo como la caja de un camión de carga que rota sobre su eje para desalojar la carga. Si sobre este cuerpo se aplica una fuerza en un punto fuera del eje de rotación, entonces el objeto tiende a rotar alrededor de su eje. Figura 6.3. Muestra un camión de carga cuya caja rota sobre un eje debido a la fuerza que el pistón ejerce sobre la caja. 144 Unidad 6 Para determinar la tendencia a rotar de un cuerpo cuando sobre él se aplica una fuerza, hay que calcular el momento de torsión M , el cual mide la tendencia de la fuerza F a hacer rotar al cuerpo rígido alrededor de un eje fijo dirigido a lo largo de M . Figura 6.4. Muestra una fuerza F aplicada en un punto r sobre el cuerpo para calcular el momento de torsión. El momento de torsión M es función de la fuerza de aplicación F , así como del punto r en donde la fuerza es aplicada. M se define como: M = r×F (6.1) El momento de torsión es una cantidad vectorial calculada del producto vectorial entre los vectores fuerza de aplicación F y el punto de aplicación r . Si θ representa el ángulo formado entre los vectores r y F , entonces la magnitud del momento de torsión es: M = rF senθ (6.2) Si a la cantidad rsen(θ) la denotamos con la letra l, entonces la magnitud del momento de torsión es: M = Fl (6.3) Nótese que l representa la distancia perpendicular entre el origen del sistema de referencia y la línea de acción de la fuerza F . Al parámetro l se le denomina brazo de palanca. 14 CinemátiCa y dinámiCa Figura 6.5. Muestra la relación entre el brazo de palanca l y la fuerza de aplicación F . l es la distancia entre el origen del sistema de referencia y la línea de acción de la fuerza F . El efecto de la fuerza F aplicada a un cuerpo es trasladar y rotar al cuerpo. Si el cuerpo rota, entonces lo hacerespecto de algún eje de rotación. El eje respecto al cual rotará el cuerpo cuando se le aplica la fuerza F , es el eje formado a lo largo de la línea de acción del vector momento M , tal y como se aprecia en la figura 6.5. Nótese que, dada una fuerza, la magnitud de la rotación depende del brazo de palancal (entre mayor brazo de palanca, mayor efecto de rotación); si por ejemplo, el punto de aplicación de F es justo el origen O del sistema de referencia, entonces el brazo de palanca es cero, por lo que no habrá efecto de rotación. Nótese también que si el ángulo entre F y r es cero, entonces tampoco hay efecto de rotación, pues en este caso el valor de l también es cero ya que: M = rF senθ M = rF sen(0) M =0 Ejemplo: La figura 6.6 muestra cuatro formas en que una fuerza de 5 N se puede aplicar a una barra de 45 cm de longitud para producir un cambio en su movimiento de rotación. Calcular el momento de torsión para cada caso. 146 Unidad 6 Figura 6.6. Muestra cuatro maneras de aplicar una fuerza a una barra rígida. Solución. Para calcular la magnitud del momento de torsión se ha de aplicar la fórmula: M = rF senθ Donde θ representa el ángulo entre los vectores r y F y r va desde el punto 0 y hasta el punto de aplicación de la fuerza. F l F l F l F l Figura 6.7. Muestra la fuerza del vector F aplicada a la barra, además de mostrar el brazo de palanca l. 147 CinemátiCa y dinámiCa De la figura 6.7 se aprecia que la magnitud del momento de torsión en el caso a) es: M = ( F)(l) M = ( −5N)(0.45m) M = −2.25Nm La magnitud del momento de torsión para el caso b) es: M = (F )(l ) M = 5 N ⋅ (0.45m)(sen32º ) M = 1.2 Nm La magnitud del momento de torsión para el caso c) es: M = ( F)(l) M = (5N)(0.45m)(sen72º ) M = 2.13Nm La magnitud del momento de torsión para el caso d) es: M = ( F)(l) M = (5N)(0.45m)(sen12º ) M = 0.46 Nm 148 Unidad 6 De acuerdo con la ecuación 6.1 se ha definido el momento de torsión como: M = r ×F Pero esta definición es útil cuando sólo actúa una fuerza sobre el cuerpo. Al considerar un caso más general, en el que en vez de actuar una sola fuerza sobre el cuerpo actúan más fuerzas entonces hay que considerar el efecto de giro de cada una de las fuerzas. Figura 6.8. Muestra cuatro fuerzas concurrentes en el punto A sobre un cuerpo rígido, también se muestra a la fuerza F t , la cual representa la fuerza resultante de las cuatro fuerzas. Considérese un cuerpo como el de la figura 6.8. En esa figura se aprecia un cuerpo sobre el cual se aplican cuatro fuerzas en el punto A; a este tipo de fuerzas se les denomina concurrentes, ya que todas ellas concurren sobre el mismo punto. Para calcular el momento de torsión total sobre el cuerpo, hay que calcular el momento de torsión debido a cada una de las fuerzas: MT = r × F1 + r × F 2 + r × F 3 + r × F 4 (6.4) En la fórmula anterior puede factorizarse el vector r: MT = r × ( F1 + F 2 + F 3 + F 4 ) Y si a la suma de fuerzas la denotamos con F t : F T = F1 + F 2 + F 3 + F 4 (6.5) Entonces el momento de torsión total es: MT = r × F T (6.6) 149 CinemátiCa y dinámiCa En donde F T representa la fuerza resultante de las cuatro fuerzas concurrentes. El resultado anterior es conocido como el teorema de Varignon, el cual afirma que: el momento de torsión con respecto a un punto dado O de la resultante de varias fuerzas concurrentes es igual a la suma de los momentos de las distintas fuerzas con respecto al mismo punto O: n MT = ∑ M i i =1 (6.7) Ejemplo: Una pieza de una máquina herramienta está fabricada de hierro y su eje de giro se ubica en el punto A, como se aprecia en la figura 6.9. Determinar el momento de torsión resultante, debido a la acción de las fuerzas indicadas en la figura 6.9. Figura 6.9. Muestra dos fuerzas que actúan sobre una escuadra rigida. 10 Unidad 6 Solución. Para resolver el ejemplo se procede de la siguiente manera: sobre la figura 6.9 se dibujan los brazos de palanca de cada fuerza. El resultado se puede apreciar en la figura 6.10. l2 l1 Figura 6.10. Muestra los brazos de palanca de cada una de las fuerzas que actúan sobre una escuadra rígida. De acuerdo con la ecuación 6.3 y al analizar la figura 6.10, se concluye que la magnitud del momento de torsión M 1 para la fuerza de 115 N es: M1 = ( F)(l1 ) M1 = ( −115N)(0.25m)(sen35°) M1 = −16.5Nm 11 CinemátiCa y dinámiCa Mientras que la magnitud del momento de torsión M 2 de la fuerza de 90 N es: M2 = ( F)(l2 ) M2 = (90 N)(0.23m)(sen50°) M2 = 15.8 Nm La magnitud del momento de torsión total es la suma de los momentos de torsión antes calculados: MT = M1 + M2 Al sustituir los resultados antes obtenidos, se obtiene el momento de torsión total: MT = ( −16.5 + 15.8)Nm MT = −0.7Nm El signo negativo del momento de torsión resultante indica que la escuadra girará en el sentido de las manecillas del reloj. 12 ejercicios Ejercicios 1. Un carrete de hilo que se encuentra sobre la guía de una máquina de coser, tiene un diámetro de 3 cm. ¿Cuál es el momento de torsión con el que la máquina hace girar a dicho carrete, si la fuerza con la que la máquina jala a el hilo es de 5.35 N? Solución. 0.08025 Nm. 2. Un operador mecánico atornilla una tuerca con ayuda de una llave española de 25 cm de longitud. Para ello aplica una fuerza de 30 N, la cual forma un ángulo de 65º con respecto a la herramienta. Calcula el momento de torsión. Solución. 6.797 Nm. 3. ¿Cuál es el momento de torsión resultante respecto al pivote O de la siguiente figura? Solución. 8.346 Nm. 4. ¿Cuál es el momento de torsión resultante respecto al punto O de la figura? 13 CinemátiCa y dinámiCa Solución. 101.811 Nm. 5. ¿Cuál es el momento de torsión resultante de la figura anterior si el eje de giro se ubicara en el punto A? Solución. 327.69 Nm. 14 Unidad 6 6.2 Segunda condición de equilibrio De acuerdo con lo establecido en estática, cuando un cuerpo se encuentra en equilibrio bajo la acción de un sistema de fuerzas que actúan en un mismo plano, la suma vectorial de dichas fuerzas debe ser nula. A esta regla se le conoce como la primera condición de equilibrio y sus fórmulas son: SFx = 0 S Fy = 0 (6.8) Si se cumple la primera condición de equilibrio entonces el sistema no tiene movimiento de traslación, sin embargo, puede darse el caso en el que, si bien no hay traslación, sí hay movimiento de rotación y sin embargo la primera condición de equilibrio se mantiene. La condición bajo la cual un cuerpo o sistema en estudio no tiene movimiento rotacional es conocida como segunda condición de equilibrio y la fórmula que la representa es: SM = 0 (6.9) Es decir, si la suma de momentos de torsión que actúan sobre un cuerpo es cero, entonces el cuerpo no presenta movimiento de rotación, y si además la primera condición de equilibrio se cumple, entonces el cuerpo se encuentra sin movimiento rotacional y de traslación. Ejemplo: Una barra de acero de peso despreciable se encuentra equilibrada en el punto de apoyo O, y soporta los pesos w1 y w2 en cada uno de sus extremos. Si w1 es igual a 40 N, ¿cuál es el valor del peso w2 y de la fuerza de reacción en el punto O? Figura 6.11. Muestra la situación planteada en el ejemplo. 1 CinemátiCa y dinámiCa Solución. Para entender la situación, es necesario trazar el diagrama de cuerpo libre como se muestra en la figura 6.12. Figura 6.12. Muestra las fuerzas que actúan sobre la barra de acero. A partir del análisis de diagrama de cuerpo libre y de acuerdo con la ecuación 6.8 se establece lo siguiente: SFx = 0 SFy = FO − 40 N − w 2 = 0 Como se puede observar, la suma de fuerzas en el eje de las ordenadas genera una ecuación de primer grado con dos incógnitas, la cual para ser resuelta requiere de una ecuación más que incluya al menos una de las dos incógnitas. Dicha ecuación puede ser generada a partir de la segunda condición de equilibrio (ecuación 6.9), tomando como eje de giro ya sea al punto O o al punto B. Si se toma el punto O: ∑M w2 = O = (40 N)(1.3m) − (w 2 )(2.45m) = 0 (40 N)(1.3m) 2.45m w 2 = 21.22 N No olvidar que los giros producidos por una fuerza en sentido antihorario son positivos y que los giros con sentido horario son negativos. 16 Unidad 6 Sustituyendo el valor de w2 en la suma de fuerzas en y se tiene que el valor de F0 es: SF y = FO − 40 N − 21.22 N = 0 FO = 61.22 N 17 ejercicios Ejercicios 1. Sobre una varilla delgada cuyo peso es despreciable se colocan tres cuerpos. Si los pesos de cada uno de ellos son de 100, 200 y 350 N y están distribuidos sobre la varilla, según indica la figura, ¿cuáles son las fuerzas que se generan en cada uno de los soportes si la varilla esta en equilibrio? Solución. 448 N, 202 N. 2. Una caja de 30 kg y otra de 50 kg se colocan en extremos opuestos de una barra de 12 m. Si la barra se apoya de su punto medio, ¿dónde debe colocarse una tercera caja de 40 kg para equilibrar el sistema? Solución. Debe colocarse a 3m de distancia de la caja de 30 kg. 3. La figura muestra una viga de material uniforme de 20.5 kg que está sostenida por dos soportes A y B. y que soporta dos cargas, una de 30.5 kg y otra de 40.7 kg. ¿Cuáles son las fuerzas ejercidas por estos soportes? A Solución. 716.16 N, 183.417 N. 18 B Solución. 2 m. D 19 ejercicios 4. La viga AD que se ilustra en la figura tiene un peso de 80 N, de uno de sus extremos cuelga un peso de 200 N, ¿A qué distancia del pivote A deberá atarse un segundo peso de 100 N para producir una tensión de 900 N en el cable BC? CinemátiCa y dinámiCa 6.3 Centro de gravedad El centro de masa de un cuerpo es el punto donde podría concentrarse toda la masa del cuerpo de tal manera que si se calcula el momento de torsión respecto de un eje de la masa concentrada en el centro de masa, entonces el resultado es igual a que si se calcula el momento de torsión respecto el mismo eje, pero de toda la masa distribuida. Para fines prácticos y cerca de la superficie terrestre, el centro de gravedad de un cuerpo coincide con el centro de masa y sus coordenadas son: 1 xγ dV w∫ 1 y = ∫ yγ dV w 1 z = ∫ zγ dV w x= (6.10) (6.11) (6.12) Donde w es el peso del cuerpo. Si se conoce el peso especifico γ(x,y,z) (el peso específico de un cuerpo es el peso por unidad de volumen del cuerpo) del cuerpo entonces el peso se expresa como: w = ∫ γ dV (6.13) V Donde el diferencial dv es un diferencial de volumen: dV = dxdydz (6.14) además γ se relaciona con la densidad ρ (masa por unidad de volumen) del cuerpo mediante la siguiente relación: γ = ρg (6.15) Siendo g = 9.81 m/s2. Ejemplo. Encuentra el centro de gravedad del cuerpo rectangular que se muestra en la figura 6.13 en la que el peso específico del cuerpo es constante e igual a 1.2 N/m3. 160 Unidad 6 Figura 6.13. Muestra el sistema de referencia en el que se ubica el cuerpo rectangular. Solución. De la figura se aprecian las dimensiones del cuerpo, éstas son necesarias para poder encontrar el centro de gravedad. De acuerdo con la ecuación 6.10, la coordenada x del centro de gravedad es: x= 1 xγ dV w∫ La integral en la fórmula anterior es una integral de volumen por lo que se trata de una integral triple: ∫ xγ dV = γ ∫∫∫ xdxdydz Al sustituir los datos del problema se obtiene la siguiente integral definida: ∫ ∫ ∫ xdxdydz 4 9 5 z =0 y =0 x =0 Para resolverla se integra primero en x: x2 = xdx ∫ 2 x =0 5 Ahora integramos en y: ∫ 12.5dy = 12.5y 5 x =0 9 y=0 9 y=0 = 25 = 12.5 2 = 12.5 × 9 = 112.5 161 CinemátiCa y dinámiCa Ahora integramos en z: ∫ 112.5dz = 112.5z 4 z =0 4 z =0 = 112.5 × 4 = 450 La integral ha sido resuelta, pero la integral original es: ∫ xγ dV = γ ∫∫∫ xdxdydz Por lo que sólo falta multiplicar por el peso especifico γ = 1.2: ∫ xγ dV = 1.2 × 450 = 540 Sólo falta calcular el peso w del cuerpo, pero como γ es constante entonces podemos aplicar la siguiente fórmula que se deduce a partir de la ecuación 6.13. w = Vγ En donde V es el volumen del cuerpo que para este ejemplo es: V= v 9 × 5 × 4 = 180 m3 Por lo que el peso es: w = 180 m 3 × 1.2 N = 216 N m3 La coordenada x del centro de gravedad es: 1 xγ dV w∫ 540 x= 216 x = 2.5 x= Por lo tanto, la coordenada x del centro de gravedad es: x = 2.5 m. De la misma manera se calcula la coordenada y del centro de gravedad de acuerdo con la ecuación 6.11: y= 162 1 yγ dV w∫ Unidad 6 Sustituyendo valores: y= 1.2 ydxdydz 216 z∫= 0 y∫= 0 x∫= 0 4 9 5 El resultado de la integral es: y = 4.5 m La coordenada z del centro de gravedad de acuerdo con la ecuación 6.12 es: 1 yγ dv w∫ z= Sustituyendo valores: z= El resultado de la integral es: z = 2 m 1.2 zdxdydz 216 z∫= 0 y∫= 0 x∫= 0 4 9 5 Por lo tanto, las coordenadas del centro de gravedad son: (2.5, 4.5, 2) m. Como el cuerpo al que se ha calculado el centro de gravedad tiene simetría rectangular (véase la N figura 6.13) y como el peso específico es constante (γ = 1.2 3 ) entonces el centro de gravedad coincide m con el centro geométrico de la figura y las coordenadas son exactamente el punto medio de la longitud de cada lado, es decir, el centro de gravedad pudo encontrarse al realizar la siguiente división: 1 (5,9,4) = (2.5,4.5,2) 2 Sin embargo el ejemplo muestra de manera clara la técnica que hay que aplicar en caso de que el cuerpo no posea simétrica rectangular o el caso en el que el peso específico no sea constante. Si el cuerpo a analizar es una placa muy delgada de densidad superficial homogénea, entonces las ecuaciones que determinan su centro de gravedad son: 1 xdxdy A ∫∫ 1 y = ∫∫ ydxdy A x= En donde A representa el área de la placa, mientras las cantidades x y y representan los centroides 163 ejercicios de área de la placa analizada. Ejercicios 1. Encuentra los centroides de una lámina plana que está limitada por las siguientes curvas: x = 5 cm y = 0 cm y = 2x2 cm Solución. x = 3.75 cm y = 15 cm 2. Determina los centroides de un medio círculo de radio 1.2 m. Solución. x=0 m 4.8 m y= 3π 3. Calcula el peso del cuerpo geométrico de la figura 6.13 si el peso específico es γ ( x, y, z ) = x Solución. 450 N 4. Calcula el centro de masa para el cuerpo geométrico de la figura 6.13 si el peso específico es γ ( x, y, z) = x 10 Solución. ,4.5,2 m 3 164 Unidad 6 6.4 Pares Dos fuerzas de igual módulo, paralelas, no colineales y de sentidos opuestos forman un par. Claramente, la suma de las componentes de las dos fuerzas es igual a cero, sin embargo, la suma de los momentos de las dos fuerzas respecto a un punto dado no es cero. Aunque un par aplicado a un cuerpo no provoca movimiento de traslación si provoca que el cuerpo gire sobre el eje que define el momento del par. Figura 6.14. Muestra el par que actúa sobre un cuerpo rígido. Al considerar el par aplicado al cuerpo rígido que se muestra en la figura 6.14, se aprecia que el momento M respecto del origen O esta dado por: M = r1 × F + r 2 × ( − F ) (6.16) Al factorizar la fuerza F se obtiene la siguiente simplificación: M = ( r1 − r 2 ) × F Si r denota la diferencia r1 − r 2 entonces el momento es: M = r×F (6.17) El momento M representa al momento del par cuya magnitud es: M = rFsenθ (6.18) 16 CinemátiCa y dinámiCa Figura 6.15. Muestra los parámetros d y θ del par. Nótese que d es la distancia entre las líneas de acción de las fuerzas que forman el par. Donde θ representa el ángulo entre r y F . Pero la cantidad d = rsenθ es precisamente la distancia que hay entre las fuerzas que forman el par, por lo que la magnitud del momento M es: M = Fd (6.19) Como el vector r (véase figura 6.14) no depende del sistema de referencia, entonces M tampoco depende del punto respecto del cual se calcula el par, por lo tanto, el momento M de un par es un vector libre que puede ser aplicado en cualquier punto del cuerpo. Ejemplo. Una persona debe cambiar la llanta de su automóvil para lo cual emplea una llave de cruz como la que se muestra en la figura 6.16. Al momento de quitar el primer tornillo, la persona coloca la llave en él y aplica una fuerza de 43 N en cada extremo de la llave. Calcula el momento del par aplicado a la llave. Figura 6.16. Muestra las fuerzas que forman el par aplicado a la llave de cruz del ejemplo; en la figura también se aprecian las dimensiones de la llave. 166 Unidad 6 Solución. La magnitud del momento del par se calcula con la ecuación (6.19): M = Fd Donde F = 43 N y d es la distancia entre las líneas de acción de las fuerzas. Nótese que d = 40 cm, que en metros equivale a 0.4 m. La magnitud del momento del par es: M = 43N × 0.4 m M = 17.2 Nm La magnitud del momento del par es 17.2 Nm. 167 ejercicios Ejercicios 1. Un par de 20 N es aplicado a un cuerpo rígido en las coordenadas (0,0,7m) î y (0,–9m,19m)(– î). Un ˆ y (0,–9,19) k. ˆ Calcula segundo par de 30 N es aplicado al mismo cuerpo en las coordenadas (0,9,19)(– k) el momento total de los dos pares. Nota. î denota el vector unitario (1,0,0), mientras que kˆ denota el vector unitario (0,0,1). Solución. (–540, 240, 180) Nm. 2. Considera un cuerpo con forma de barra que puede girar alrededor de uno de sus extremos. Sobre la barra se aplica un par de 200 N y una fuerza de (0,–400 N) a 0.3 m de su punto de rotación. La barra tiene una inclinación de 60° respecto de la horizontal. Si se desea quitar el par aplicado, entonces ¿en qué punto de la barra hay que aplicar la fuerza de 400 N para que el efecto sobre la barra sea el mismo que si se deja el par? Solución. Hay que aplicar la fuerza de 400 N a una distancia de 0.42 m de su extremo sobre el cual gira la barra. 3. Si la distancia entre las líneas de acción del ejercicio anterior es de 0.12 m, entonces calcula el momento resultante sobre la barra. Solución. 127.92 Nm. 168