procedimiento y dispositivo para el funcionamiento de una red de
Anuncio

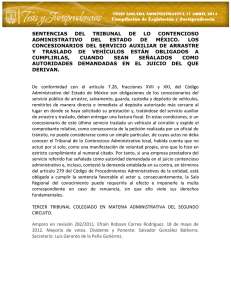
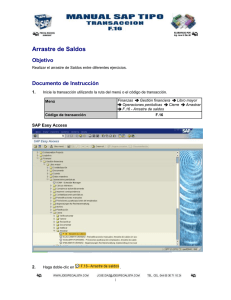
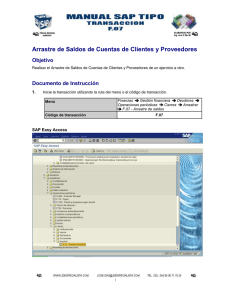
k OFICINA ESPAÑOLA DE PATENTES Y MARCAS 19 k kInt. Cl. : A01K 73/04 11 Número de publicación: 2 182 091 7 51 ESPAÑA k TRADUCCION DE PATENTE EUROPEA 12 kNúmero de solicitud europea: 97926287.0 kFecha de presentación: 02.06.1997 kNúmero de publicación de la solicitud: 0 959 676 kFecha de publicación de la solicitud: 01.12.1999 T3 86 86 87 87 k 54 Tı́tulo: Procedimiento y dispositivo para el funcionamiento de una red de arrastre. k 73 Titular/es: SCANTROL A/S k 72 Inventor/es: Hammersland, Helge y k 74 Agente: 30 Prioridad: 03.06.1996 NO 962273 Midttunheia 22 5050 Nesttun, NO 45 Fecha de la publicación de la mención BOPI: 01.03.2003 45 Fecha de la publicación del folleto de patente: ES 2 182 091 T3 01.03.2003 Aviso: k k Tvedt, Arne k Garcı́a-Cabrerizo y del Santo, Pedro Marı́a En el plazo de nueve meses a contar desde la fecha de publicación en el Boletı́n europeo de patentes, de la mención de concesión de la patente europea, cualquier persona podrá oponerse ante la Oficina Europea de Patentes a la patente concedida. La oposición deberá formularse por escrito y estar motivada; sólo se considerará como formulada una vez que se haya realizado el pago de la tasa de oposición (art. 99.1 del Convenio sobre concesión de Patentes Europeas). Venta de fascı́culos: Oficina Española de Patentes y Marcas. C/Panamá, 1 – 28036 Madrid 1 ES 2 182 091 T3 DESCRIPCION Procedimiento y dispositivo para el funcionamiento de una red de arrastre. La presente invención trata de un procedimiento y de una disposición para el funcionamiento de una red de arrastre, es decir, para controlar los movimientos durante la pesca de una red de arrastre, como se indica en la introducción al procedimiento siguiente y en las reivindicaciones de la disposición, junto con la solicitud correspondiente. La invención está relacionada con la capacidad para controlar y optimizar la posición de la red de arrastre en el mar para que se pesque de manera eficiente. La invención se relaciona especialmente con el funcionamiento de las redes de arrastre de profundidad. Una red de arrastre se compone de una bolsa en forma de cucurucho de material de red abierta en la parte delantera y cerrada en la parte trasera. La parte delantera de la red de arrastre constituye una parte de guı́a en forma de embudo que dirige o controla la captura del pescado, langostinos y similares, y hacia atrás dentro de la parte trasera, que constituye la bolsa de la red de arrastre per se, en la que se acumula la captura. Una serie de cables tales como alambres o enlaces de cadenas conectan la red de arrastre con el buque de pesca (un arrastrero). Cada cable se compone de medios de extensión, como una puerta de red de arrastre (flotador para dragar las minas) para estirar la parte delantera de la red de arrastre, es decir, la parte de la entrada hacia la bolsa de la red de arrastre. La cola de la bolsa de la red de arrastre puede abrirse para vaciar la captura, por ejemplo, cuando la red de arrastre se recoge sobre la cubierta del buque. Durante la pesca, los cables de la red de arrastre están conectados a los medios respectivos que regulan la fuerza de la tensión, como un chigre, a bordo del buque, y son remolcados a través del mar. De ese modo, las puertas de la red de arrastre ponen en horizontal su parte respectiva y la parte abierta de la entrada de la red de arrastre se mantiene estirada. Los sistemas de control de la red de arrastre que se emplean hasta ahora controlan la red de arrastre manteniendo la tensión equitativa en los cables que arrastran la red de arrastre. Esto se realiza en la práctica manteniendo una fuerza de tensión igual sobre los motores del chigre. El antecedente de este procedimiento radica en que se supone que las fuerzas de tensión FS1 y FS2 (observe la Figura 1 que viene a continuación) en los cables entre las respectivas puertas de la red de arrastre y la red de arrastre, son iguales si las fuerzas en los alambres de la red de arrastre FW1 y FW2 fuera del buque son iguales. Con un reglaje de este tipo se obtiene un ajuste automático cuando el buque cambia su recorrido (observe las Figuras 4a y 5a) o navega en contra del viento, por lo que la bolsa de la red de arrastre se mantiene abierta. También se obtiene una compensación segura en las diferentes condiciones de las corrientes marı́timas durante las maniobras del buque en el mar. Incluso aunque la fuerza de tensión sobre los motores del chigre sea igual, existen muchas con2 5 10 15 20 25 30 35 40 45 50 55 60 65 2 diciones que convierten las fuerzas que actúan sobre la red de arrastre en fuerzas desiguales, y que hacen que la geometrı́a de la red de arrastre se aparte de su geometrı́a óptima. Una de éstas pueden ser las condiciones de fricción en los chigres per se, una fricción del 10 % que da una diferencia del 20 % en la tensión del cable cuando los chigres giran en direcciones opuestas. Además, el propio cabrestante del cable sobre los carretes pueden tener una calidad variante, y la fricción en los propios bloques de cables puede variar. Con una geometrı́a óptima de la red de arrastre se da a entender que la bolsa de la red de arrastre se ajusta simétricamente alrededor de un plano vertical a través del eje longitudinal de la red de arrastre. Cuando la dirección del caudal del agua dentro de la parte abierta de la red de arrastre forma aproximadamente un ángulo recto en un plano en ángulo recto respecto al eje longitudinal de la red de arrastre se considera que la red de arrastre tiene un ajuste óptimo en relación con la dirección del caudal del agua para conseguir una pesca más efectiva. Durante el remolque, la geometrı́a de la red de arrastre se desvı́a de la geometrı́a óptima, por lo que la red de arrastre captura cantidades insuficientes de peces y puede llegar a ser inestable. Es más, en cuanto a los términos de geometrı́a de la red de arrastre y de geometrı́a óptima de la red de arrastre, se tienen que diseñar las redes de pesca de arrastre de manera diferente contando con el tipo de pescado se va a capturar y con el tamaño del buque. Los fabricantes de redes de arrastre indican qué tipo de abertura deben tener dichas redes (altura y anchura), y esto se diseña para conseguir una apertura óptima en la entrada de la red de arrastre. Cuando el fondo marino es poco uniforme en estribor y las puertas de la red de arrastre de babor pueden tener un contacto totalmente distinto en la profundidad, se generan fuerzas de tensión FS1 o FS2 diferentes en la red de arrastre, incluso aunque las tensiones FW1 y FW2 en los cables situados respectivamente fuera del buque hacia las puertas de las redes de arrastre sean igualmente grandes. Cuando la red de arrastre se remolca sobre el fondo oblicuo marino, como se muestra en la Figura 4a, las puertas de la red de arrastre deberán estar a profundidades diferentes, es decir, ambas puertas de redes de arrastre contactarán en la profundidad. Si la tensión del cable en los dos cables es la misma se corre el riesgo de que la puerta de la red de arrastre situada en la zona más baja (24) pierda el contacto de profundidad. En este caso, la fuerza de fricción se iguala a cero, y el chigre asociado atraerá al cable (14) hasta que la tensión se iguale en el otro cable (16). Con esto, la red de arrastre (12) se posiciona de forma oblicua, y puede perder completamente el contacto con el fondo marino. Las condiciones de las corrientes marinas es otro factor que afecta al ajuste. Si el caudal del agua no llega directamente, los laterales dentro de la abertura de la red de arrastre podrán estar expuestos a fuerzas que afectan a los laterales, por lo que las mallas se arrastran conjuntamente hasta un lateral, mientras que se extienden en el lateral opuesto. 3 ES 2 182 091 T3 Todas las condiciones anteriormente mencionadas conducen a una geometrı́a incorrecta de la red de arrastre, donde la red de arrastre (es decir, la abertura de la entrada) cubre una zona más pequeña de lo que serı́a aconsejable, y, por lo tanto, la red de arrastre captura menos cantidad de peces. La red de arrastre se hace inestable y proporciona un escaso contacto en la profundidad, por lo que el pescado puede escapar bajo la red de arrastre. Además, se usa innecesariamente demasiado combustible durante las maniobras anteriormente mencionadas. Ası́, se presenta una serie de sistemas de medición que se emplean para registrar o controlar las condiciones dentro o alrededor de la red de arrastre per se. Por ejemplo, se pueden preparar sensores para medir la cantidad de pescado que hay en la parte de la entrada de la red y dentro de la misma bolsa de la red de arrastre, y para medir la altura de la abertura de la entrada de la red de arrastre y su velocidad a través del agua. Sin embargo, estos sistemas y sensores no tienen conexión con el sistema de control de la red de arrastre y el chigre, pero se emplean exclusivamente por el patrón del buque para calcular la cantidad de potencia que tiene que usar, y la cantidad de pescado que hay en la red de arrastre, posiblemente también para controlar que la red de arrastre y la bolsa de la red de arrastre no estén dañadas. Respecto al sistema conocido anteriormente que controla el funcionamiento de las redes de pesca de arrastre a través de la tensión del alambre, el antecedente se encuentra en la publicación de la patente de Gran Bretaña número 2.266.694. Es un objetivo de la presente invención proporcionar un procedimiento novedoso y un sistema de control novedoso que elimina completamente los inconvenientes que se han mencionado anteriormente. Ası́, es objetivo de la invención proporcionar un procedimiento y un sistema de control con el que la abertura de la entrada a una red de arrastre, durante la pesca por arrastre, se ajusta todo el tiempo a la geometrı́a óptima para que el agua pase directamente hacia la entrada abierta de la bolsa, como se ha mencionado anteriormente. La invención se caracteriza por las caracterı́sticas que son evidentes a partir de la parte caracterizadora de la reivindicación 1 independiente. Realizaciones especı́ficas de la invención se indican en las reivindicaciones subordinadas. La invención se explicará ahora con mayor profundidad en relación con las figuras adjuntas, de las que la Figura 1 y en parte la 4 ya se han analizado en esta descripción. 5 10 15 20 25 30 35 40 45 50 55 La Figura 1 muestra esquemáticamente un buque que remolca detrás una red de arrastre. La Figura 2 muestra un diagrama de circulación del acoplamiento del sistema de control según la invención. La Figura 3 muestra una situación de remolque donde se usa el sistema de control según la invención. La Figura 4 muestra el buque esquemáticamente 60 65 4 y la red de arrastre, que es remolcada a lo largo del fondo marino. La Figura 4a muestra más especı́ficamente la situación según la técnica conocida anteriormente (analizada anteriormente). La Figura 4b muestra la situación en la que se usa el sistema de control según la invención. La Figura 5 muestra una situación de remolque donde se usa el sistema de control según la invención durante un remolque común de dos redes de pesca de arrastre situadas en paralelo. A modo de introducción, se hará referencia a las Figuras 1 y 2, que ilustran un buque (10) que remolca detrás una red de arrastre (12). La cola de la red de arrastre se compone de una bolsa en la red de arrastre (13) en la que se acumulan los peces. La superficie del mar se ilustra con el número 11. La red de arrastre (12) se monta en los chigres del buque (10) (se muestra un chigre (26) en la Figura 2) a través de dos cables (14, 16), y éstos se fijan a la red de arrastre sobre cada lateral en la parte de la entrada (18). Además, la abertura en la entrada de la red de arrastre se compone de medios de estiramiento, como los pesos, que, por ejemplo, llevan los sedales a la profundidad y los medios de flotabilidad a la parte superior, contribuyendo ası́ a que la parte de la abertura se mantenga extendida. Una red de arrastre puede además tener diámetros de abertura diferentes (18) desde 5 a 6 metros hasta más de 30 a 40 metros. Para cada cable (14, 16), hay sujetada una puerta de red de arrastre (flotador para dragar las minas) (22 y 24 respectivamente) justo antes de la abertura (18) y las puertas de las redes de arrastre se ponen en horizontal durante el remolque para que la abertura de la entrada (18) de la red de arrastre (12) se mantenga estirada. Además, la red de arrastre (12) se puede colocar tan profundamente que roza el fondo marino. Será evidente que los cables situados entre las puertas de las redes de arrastre y la red de arrastre adopten forma de abanico. Como es evidente por la Figura 2, un sensor (30) o un equivalente está permanentemente montado en conexión con la abertura en la entrada (18) de la red de arrastre, que en funcionamiento puede registrar continuamente las condiciones de la corriente en la forma de dirección del caudal del agua en el océano, en la región contigua a la red de arrastre. El sensor (30) del tipo, por ejemplo, SCANMAR S4TSS, está adaptado especialmente para medir la dirección y la velocidad del mar hacia la abertura (18) de la red de arrastre. El medidor habitual (30) se coloca (está fijado) preferiblemente directamente en la parte superior de la red de arrastre, contiguo a la abertura (18), también denominado “sedal de proa”. El sedal de proa puede contener un cabo o un alambre que pasa alrededor de la periferia hasta la abertura de la entrada de la red de arrastre. El sensor (30) está adaptado para registrar las condiciones de la corriente, y para transmitir información a un receptor del buque. Las señales pueden ser transmitidas al buque a través de la radio o de un cable separado. 3 5 ES 2 182 091 T3 En la parte equilibrada del casco del buque, se monta un hidrófono (32) (del tipo SCANMAR o equivalente), que (de forma inalámbrica) puede recibir los registros cuando son transmitidos desde el sensor (39) en forma de ondas sonoras, como se indica con los números 28 y 29 en la Figura 2. Tanto el sensor como el hidrófono son instrumentos que están disponibles comercialmente. Las señales que son registradas por el hidrófono se transmiten a través de un cable (alambre) (33) a una unidad de recepción (34), por ejemplo, un convertidor de señales del tipo o similar al SCANMAR RU400, en un espacio de control (sala de timón) a bordo y que descodifica las señales. Las señales se transmiten a un ordenador (36SCANTROL AC 501 o similar) a través del cable (37). El ordenador (36) está además acoplado a través de cables (alambres) (41) a dos chigres de los que sólo uno se muestra con el número 26 en la Figura 2. En la invención, es la dirección del caudal (P3) del agua hacia el sensor (30) la que regula el parámetro. Según un aspecto de la invención, el programa incluirá el control de los chigres para que la desviación desde el ajuste óptimo de la red de arrastre se haga tan pequeña como sea posible, ya que el sensor registra la dirección del caudal del agua en relación con una dirección estándar dada (aconsejable), basada en la construcción y en la geometrı́a de la red de arrastre en posición extendida. La información que se recibe desde el sensor (30) se emplea de la siguiente manera: El funcionamiento de cada uno de los chigres (26), es decir, el ajuste de su fuerza de tensión, se regula individualmente a través del ordenador (36) para que la abertura (18) en la red de arrastre establezca todo el tiempo la dirección óptima, es decir, que el caudal del agua se meta directamente en el interior de la abertura (18). Ası́, la red de arrastre se define como una red estable. Un ajuste práctico y el logro del funcionamiento del sistema se pueden conseguir de la siguiente manera: 5 10 15 20 25 30 35 40 45 1. Las condiciones de la corriente (más la velocidad) se miden y se registran en un periodo de tiempo de entre 3 y 5 minutos. 2. Sobre la base de una medición normal, el ordenador calcula los posibles cambios en la tensión del cable, y se logra el ajuste en el funcionamiento de los chigres. 50 3. Se espera un periodo de tiempo de entre 3 y 5 minutos para que se estabilice la posición de la red de arrastre. 55 A partir de entonces, los pasos 1 a 3 se repiten a intervalos regulares. Este procedimiento también se puede llevar a cabo de forma continua y automática. Controlando activamente la posición y el contorno de la red de arrastre durante el remolque se consiguen las siguientes ventajas: Se consigue un tamaño óptimo en la abertura de la entrada, una geometrı́a correcta en la red de arrastre y una red de arrastre estable totalmente 4 60 65 6 independiente de la fricción en el chigre y en los bloques, e independientemente de los problemas con las jarcias precisas. Por jarcia se entiende el diseño y la longitud de los cables que se extienden entre la red de arrastre y la puerta de la red de arrastre. Según la invención, se pueden realizar demandas menores sobre los chigres y jarcias, y es posible mejorar la geometrı́a de la red de arrastre sin ampliar la inversión en los equipos de chigres. Además, pescando en fondos con forma oblicua (observe Figura 4) se obtiene una geometrı́a correcta en la red de arrastre y en redes de arrastre estables, puesto que se consigue un buen contacto en el fondo y se evita la pérdida de pescado bajo la red de arrastre. Cuando el caudal del agua entra directamente en la abertura de una red de arrastre se consigue una red de arrastre estable con una geometrı́a correcta en la red de arrastre. La abertura en la red de arrastre cubre entonces una zona más amplia, y se garantiza el contacto en el fondo a lo largo de todo el sedal de profundidad. Además, se reduce el consumo de combustible ya que se reduce la necesidad de ejercer fuerza en el remolque. En las Figuras 3 a 5 se muestra una serie de situaciones que surgen durante la pesca activa con un equipo de red de arrastre, e ilustran cómo funciona una red de arrastre usando las soluciones previamente conocidas (tratadas también en la parte anteriormente mencionada) y usando la presente invención. La Figura 3 muestra una situación tı́pica de remolque donde el arrastrero se mueve hacia la proa a una velocidad estipulada en dirección a la flecha P1. La propia red de arrastre permanece en el mar a una profundidad estipulada bajo la superficie oceánica (11). La corriente oceánica del sitio y la profundidad de la red de arrastre se muestran con la flecha P2. La corriente de agua resultante, en relación con la red de arrastre, se muestra con la flecha P3. Mediante un sistema de regulación según la invención se regula a bordo la fuerza de tensión de los chigres en la red de arrastre, por lo que la abertura en la red de arrastre se optimiza, es decir, la red de arrastre se adapta para que la corriente (P3) vaya tan rápido como sea posible en dirección hacia la abertura de la red de arrastre. Una abertura óptima en la red de arrastre comprende que la dirección del caudal (P3) del agua está aproximadamente a un ángulo recto de un plano en ángulo recto hacia la dirección y el eje longitudinales de las redes de arrastre. Esta dirección del caudal (P3) es la que el sensor (30) detecta. Entonces, la corriente aportará una abertura óptima a través de la parte extendida externa en las puertas de las redes de arrastre (22, 24). La Figura 4a muestra la situación con los sistemas conocidos (FW1 = FW2), cuando el fondo marino es irregular, según el cual las puertas de las redes de arrastre de estribor (24) y de babor (22) ejercen un contacto en la profundidad totalmente distinto. Esta situación crea fácilmente diferentes fuerzas de tensión (FS1 y FS2) (indicadas en la Figura 2) en la red de arrastre respectivamente, incluso aunque las tensiones FW1 y FW2 en los cables y en los cables fuera del buque hacia las puertas de las redes de arrastre sean igual- 7 ES 2 182 091 T3 mente grandes. Las puertas de las redes de arrastre más bajas (24) pueden ası́ perder el contacto con la profundidad. En este caso, la fuerza de fricción pasa a cero, y el chigre asociado atraerá el cable (14) hasta que esa tensión sea igual a la tensión del otro cable (16). Con esto, la red de arrastre (12) se coloca oblicuamente y puede perder el contacto con la profundidad. De esta manera, se puede perder la captura del pescado. En la Figura 4b, se muestra la manera en que funcionará la red de arrastre cuando se aplique el sistema de regulación según la invención. Si una de las puertas de las redes de arrastre (24) o un lateral de la propia red de arrastre sube desde el fondo marino, el chigre asociado podrı́a, con el sistema previamente conocido en virtud de la tensión constante del cable (FW1 = FW2), tirar de la red de arrastre fuera de su posición óptima. Con el sistema según la invención, esta oblicuidad es registrada por el sensor, que regulará la tensión del cable para que la puerta de la red de arrastre (24) y la red de arrastre adquieran inmediatamente una posición más favorable. Es decir, la puerta de la red de arrastre y la red de arrastre se mantendrán correctamente todo el tiempo en el fondo marino. Según la invención, se produce entonces un sistema novedoso de control para la pesca de arrastre que elimina completamente las desventajas de los dispositivos de regulación conocidos anteriormente. En la Figura 5 se muestra cómo se aplica el sistema de control según la invención cuando el buque remolca dos redes de arrastre (40, 42) colocadas esencialmente en paralelo. Como ejemplo, se han ilustrado dos redes de arrastre con una longitud de 102 metros, una altura vertical en la abertura de la entrada de 11 metros, y una anchura horizontal de 25 metros, donde la distancia horizontal entre las parte delantera de las bolsas alcanza también los 25 metros. Los laterales exteriores de las redes de arrastre están conectados a sus respectivos chigres a bordo del buque a través de cables (44, 46), que tienen fijadas las puertas de las redes de arrastre (flotador para dragar las minas) (22, 24). Los laterales de las bolsas mutuamente contiguos se conectan o se unen a los cables (48, 50) (cada uno sujetado a la red de arrastre adoptando una forma de abanico) en un momento que comprende una masa pesada o peso en forma de plomo (52), que puede impedir que el tercer cable del remolque (45) levante las redes de arrastre desde el fondo. El tercer cable del remolque (45) se extiende hacia el tercer chigre a bordo del buque. La tensión en los tres cables está designada (FW1, FW2, y FW3). En la práctica, uno de los cables espera obtener fuerzas de tensión iguales (FW1 y FW2) en los cables externos (44 y 46), mientras que la tensión FW3 en el cable (45) es regulada por el sensor (60), basado en un ajuste óptimo de la red de arrastre. 5 10 15 20 25 30 35 40 45 50 55 60 8 Una disposición de red de arrastre doble de este tipo hará que la pesca resulte totalmente efectiva en relación con la energı́a necesaria para el remolque, y, por lo tanto, ha contado con una creciente solicitud dentro de la pesca por arrastre. Sin embargo, es mucho más difı́cil controlar este sistema de red de arrastre doble que una red de arrastre simple. Una red depende totalmente del punto (52) de acoplamiento (donde se monta el peso) entre las dos redes de arrastre (40, 42) que están en la posición correcta en relación con las dos puertas de redes de arrastre (22, 24). Si las redes de arrastre tienen una geometrı́a poco práctica (definido anteriormente), la captura será menor. Tradicionalmente, un cable de centro de este tipo ha sido regulado previamente de dos maneras. 1. El cable de centro (45) se regula para que tenga una diferencia de longitud fijada en relación con la longitud de los cables exteriores (44, 46). 2. La tensión del cable (FW3) se regula para que tenga una relación de tensión fijada en relación con las dos tensiones exteriores (FW1, FW2). La desventaja que presenta estas soluciones es que es muy difı́cil dar con la diferencia de longitud (punto 1) o la relación de la tensión (punto 2), que produzca una abertura óptima en la red de arrastre. Esto se debe a que ambos tamaños variarán según la profundidad oceánica, las condiciones de profundidad, las condiciones de la corriente y la cantidad de captura acumulada en la bolsa de la red de arrastre. Según la invención, este tipo de sistema doble de red de arrastre puede ahora controlarse fijando un sensor de dirección de la corriente (60) del tipo que se ha explicado anteriormente en la parte superior de una de las redes de arrastre (40, 42), o que las redes de arrastre consten de sus respectivos sensores, que actúan separadamente. La tensión en los chigres se regula entonces según lo registrado por los sensores. El sistema de control se adapta ası́ para que la longitud del cable de centro (45) se regule hasta que el caudal del agua entre directamente en la abertura de la red de arrastre. De ese modo, no se necesita dar con la diferencia de longitud o la relación de tensión correctas, como se describió anteriormente, y tal y como era normal previamente. Si cada red de arrastre se compone de un sensor, según una solución alternativa, las señales procedentes de este sensor se combinan en el sistema de control del buque, y la fuerza de tensión en los tres cables (44, 45, 46) se regula para que ambas redes de arrastre se ajusten en una posición óptima para conseguir una captura efectiva. 65 5 9 ES 2 182 091 T3 REIVINDICACIONES 1. Procedimiento de control de una o más redes de arrastre (12, 40, 42), que se componen de una bolsa en la red de arrastre (13), y que se remolca(n) detrás de un buque (10), donde una o más redes de arrastre (12, 40, 42) a través de una serie de cables (16, 14; 44, 45, 46) se conecta(n) a medios (26) que regulan la tensión del cable en el buque (10), y donde los medios (22, 24) contribuyen a mantener la abertura de la red (redes) extendida(s) durante el movimiento a través del mar; caracterizado porque la tensión individual (FW1, FW2, FW3) en uno o más cables o alambres (16, 14; 44, 45, 46) se regula sobre la base de medidas de la dirección para el caudal de agua resultante (P3) contiguo a la red de arrastre, por lo que el caudal de agua resultante (P3) va en dirección a la abertura de la red de arrastre aproximadamente en ángulo recto a un plano en ángulo recto respecto al eje longitudinal de la red de arrastre. 2. Procedimiento según la reivindicación 1, caracterizado porque la medida de la dirección del caudal de agua resultante se realiza con un sensor (30, 60) que se coloca contiguo a la red de arrastre (12, 40, 42), y se fija preferentemente en la parte superior de la red de arrastre. 3. Procedimiento según las reivindicaciones 1 y 2, para el control de las dos redes de arrastre (40, 42), que se remolcan mutuamente en paralelo detrás de un buque (10), donde las partes exteriores de las redes de arrastre se conectan a través de cables (44, 46) a los respectivos medios que regulan la tensión de los cables en el buque, mientras que las partes de las redes de arrastre mutuamente adyacentes se unen a los cables (48, 50) en un punto (52) desde el que un tercer cable (45) se dirige hacia la parte delantera del buque; caracterizado porque las fuerzas de tensión (FW1, FW2) en los cables exteriores (44, 46) se mantienen aproximadamente iguales, mientras que la tensión (FW3) en el tercer cable (45) se regula para que el caudal de agua resultante (P3) vaya en dirección hacia las aberturas de las redes de arrastre aproxi- 5 10 15 20 25 30 35 40 45 10 madamente en ángulo recto a un plano en ángulo recto respecto al eje longitudinal de dichas dos redes de arrastre. 4. Disposición para el control de una o más redes de arrastre, componiéndose la disposición de una o más redes de arrastre (12, 40, 42) que poseen una bolsa en la red de arrastre (13) y que se remolca(n) detrás de un buque (10), donde una o más redes de arrastre (12, 40, 42), a través de una serie de cables (16, 14; 44, 45, 46), se conecta(n) a medios (26) que regulan la tensión del cable en el buque (10), y que se componen de medios (22, 24) de extensión de la red de arrastre para mantener una o más aberturas en la red de arrastre extendidas durante el movimiento a través del mar; caracterizada porque una serie de sensores (30, 60) están dispuestos de manera contigua a la(s) red(es) de arrastre para medir la dirección del caudal de agua resultante (P3) adyacente a la red de arrastre, que uno o más sensores se conectan a los medios (26) que regulan la tensión de los cables, y la regulación está preparada para regular la tensión individual de los cables (FW1, FW2, FW3) sobre la base de dichas medidas del caudal para que el caudal de agua resultante (P3) vaya en dirección hacia la abertura de las redes de arrastre aproximadamente en ángulo recto a un plano en ángulo recto respecto al eje longitudinal de las redes de arrastre. 5. Disposición según la reivindicación 4, caracterizada porque los sensores (30, 60) están dispuestos de manera contigua a las redes de arrastre (12, 40, 42), y están colocados preferentemente en la parte superior de la red de arrastre. 6. Disposición según la reivindicación 4 y 5, caracterizada porque los sensores (30, 60) están adaptados para transmitir datos, ası́ como ondas sonoras (29), a un hidrófono colocado en el buque. 7. Disposición según una de las reivindicaciones 4-5, caracterizada porque el sensor (30, 60) está adaptado para transmitir datos a través de un cable. 8. Disposición según una de las reivindicaciones 4 a 7, caracterizada porque cada uno de los medios (26) de regulación de la tensión de los cables se componen de un chigre (26). 50 55 60 NOTA INFORMATIVA: Conforme a la reserva del art. 167.2 del Convenio de Patentes Europeas (CPE) y a la Disposición Transitoria del RD 2424/1986, de 10 de octubre, relativo a la aplicación del Convenio de Patente Europea, las patentes europeas que designen a España y solicitadas antes del 7-10-1992, no producirán ningún efecto en España en la medida en que confieran protección a productos quı́micos y farmacéuticos como tales. 65 Esta información no prejuzga que la patente esté o no incluı́da en la mencionada reserva. 6 ES 2 182 091 T3 7 ES 2 182 091 T3 8 ES 2 182 091 T3 9 ES 2 182 091 T3 10