Sensores y Actuadores en Microbótica
Anuncio

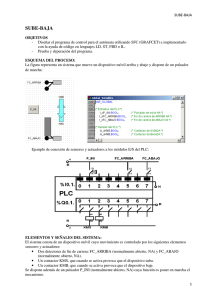
Universidad de Extremadura Escuela de Ingenierías Industriales Sensores y Actuadores en Microbótica Autor: José Ignacio Suárez Marcelo Badajoz, mayo 2002 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Índice General Página ÍNDICE GENERAL ................................................................................................ I 1. FOTORRESISTENCIAS (LDR) ......................................................................... 1 2. SENSORES INFRARROJOS (CNY70) ............................................................. 6 3. SENSORES FINALES DE CARRERA .............................................................. 10 4. SENSOR DE TEMPERATURA LM335A ......................................................... 13 5. CIRCUITO ACONDICIONADOR PARA EL MANEJO DE MOTORES ........ 15 6. MOTORES DE CORRIENTE CONTINUA MOTORES .................................. 18 BIBLIOGRAFÍA ..................................................................................................... 23 José Ignacio Suárez Marcelo I Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica 1. FOTORRESISTENCIAS (LDR) Las fotorresistencias o resistencias dependientes de la luz (LDR, del inglés, “Light Dependent Resistors”) basan su principio de funcionamiento en la variación de resistencia eléctrica que presenta un material semiconductor cuando incide sobre él radiación óptica (figura 1.1). La variación de resistencia de un material depende de la conductividad eléctrica mediante la ecuación: R= 1L σS siendo, R ≡ la resistencia eléctrica L ≡ la longitud del conductor S ≡ la sección del conductor σ ≡ la conductividad eléctrica La conductividad eléctrica de un material depende del número de portadores en la banda de conducción. En un semiconductor, el aumento de conductividad se lleva a cabo mediante el aporte de energía externa, que hacen que electrones de la banda de valencia salten a la banda de conducción. Este salto se ve favorecido si se dopa el semiconductor. Una onda electromagnética como la de la luz tiene una energía que viene dada por la expresión: E = hν donde, E ≡ energía de la radiación óptica h ≡ constante de Planck ν ≡ frecuencia de la radiación Si la onda tiene una energía suficiente para hacer que electrones de la banda de valencia salten a la de conducción, pero sin llegar a ser desprendidos del material, se produce el llamado, efecto fotoeléctrico interno o fotoconductor. José Ignacio Suárez Marcelo 1 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica La relación entre la resistencia de una LDR y la cantidad de luz que recibe viene dada por una relación fuertemente no lineal. Un modelo simple sería el siguiente: R = AE − α siendo, R ≡ la resistencia eléctrica E ≡ la densidad superficial de energía recibida [lux] A, α ≡ parámetros que dependen del material y del proceso de fabricación Teniendo en cuenta que α toma valores típicos comprendidos entre 0,7 y 0,9 puede verse claramente que al aumentar la cantidad de luz recibida disminuye la resistencia del material semiconductor. Figura 1.1 Aspecto de una LDR o fotorresistencia Otro factor importante a tener en cuenta es la constante de tiempo de las LDR. Concretamente poseen dos constantes de tiempo distintas: una al iluminar (disminución de resistencia) y otra al extinguir la luz (aumento de resistencia). Sus unidades suelen venir expresadas en milisegundos. Un factor que influye en el funcionamiento de las LDRs es la temperatura, que afecta su sensibilidad, ya que el aumento de aquella hace desprender pares de electrónhuecos. José Ignacio Suárez Marcelo 2 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica La respuesta espectral de las fotorresistencias es estrecha, debiéndose elegir en función de la longitud de onda a detectar. En el mercado suelen encontrarse, para aplicaciones habituales, con respuestas centradas en longitudes de onda alrededor de 550nm. El material más común para su construcción, en la zona visible del espectro y para su uso a temperatura ambiente, es el sulfuro de cadmio (CdS). Entre las aplicaciones más importantes en las que se puede emplear una LDR se tienen: control automático de brillo y contraste en receptores de televisión, control de exposición en cámaras, control de iluminación urbana, detectores de humo, detección de presencia por corte del haz de luz, detectores de fuego, etc. • Circuitos de aplicación con microcontroladores. En la figura 1.2 se pueden ver dos formas de conectar una fotorresistencia a un microcontrolador. (a) (b) Figura 1.2 Formas de conectar una LDR a un microcontrolador La LDR (R2) junto con la resistencia R1 de 10K forman un divisor resistivo. La tensión medida en el punto medio de este divisor variará según varíe la luz que incida sobre el José Ignacio Suárez Marcelo 3 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica LDR. En el caso de la figura 1.2.a, cuanto mayor sea la cantidad de luz incidente sobre la LDR, menor será su resistencia y, por tanto, menor será la tensión de salida VO. El valor de esta tensión se obtendrá de la expresión (suponiendo que hacia el microcontrolador se vaya una corriente despreciable): VO = VCC R2 R1 + R 2 siendo VCC el voltaje de alimentación (en este caso +5V). Por contra, con el montaje de la figura 1.2.b, al aumentar la luz incidente también aumentaría la tensión de salida, cuyo valor será obtenido con la ecuación (suponiendo también despreciable la corriente que circula hacia el microcontrolador): VO = VCC R1 R1 + R 2 La tensión de salida VO se lleva a una de las entradas de conversión analógica/digital del microcontrolador. Si éste no dispone internamente de un conversor A/D, habrá que usar uno externo, o bien usar un montaje similar al de la figura 1.3. Figura 1.3 Conexión de una LDR a un microcontrolador que no posea convertidor A/D. En este caso se ha conectado una LDR junto con un condensador a una de las entradas digitales de un microcontrolador. Para saber la cantidad de luz que incide sobre José Ignacio Suárez Marcelo 4 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica la LDR se procede como sigue: primeramente se programa el puerto del microcontrolador como salida y se pone a nivel bajo. Con esto conseguimos descargar el condensador C1. A continuación ponemos el puerto funcionando como entrada, por lo que el condensador empezará a cargarse. Si se hace ahora una lectura del puerto se tendrá un nivel bajo. Previamente debemos poner un temporizador en marcha, para contar el tiempo que tarda en cargarse el condensador. Cuando la tensión en el condensador (VO) sea lo suficientemente alta se podrá leer en el puerto un nivel alto. Cuando esto suceda se detendrá la cuenta del temporizador. Éste contendrá un valor que indicará la cantidad de iluminación. Con poca luz, la resistencia de la LDR será grande, por lo que la tensión en el condensador aumentará lentamente y, en consecuencia, el valor del temporizador será alto. Sin embargo, si el nivel de iluminación es mayor el tiempo contado será menor. José Ignacio Suárez Marcelo 5 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica 2. SENSORES INFRARROJOS (CNY70). Los sensores infrarrojos CNY70 constan de emisor (diodo LED) y un receptor (fototransistor) de rayos infrarrojos (longitud de onda de 950 nm) encapsulados en un mismo dispositivo. Este dispositivo es fabricado por la empresa alemana Vishay, antigua Telefunken (figura 2.1). La luz infrarroja emitida por el diodo LED rebota en un objeto hacia el fototransistor, aprovechando el efecto de difusión de la mayoría de los materiales respecto de esta longitud de onda, y gracias a la escasez de esta radiación en el ambiente, es detectada sin excesivas interferencias por el fototransistor. Figura 2.1 Sensor infrarrojo CNY70 fabricado por la empresa Vishay. El funcionamiento de este sensor es muy sencillo. Cuando se activa el diodo LED (emisor) éste emite radiación infrarroja. Si cerca del sensor existe un objeto de color claro (por ejemplo, blanco) los rayos rebotan en él volviendo al sensor, donde son recogidos por el fototransistor (figura 2.2). El fototransistor conducirá más o menos corriente dependiendo de la cantidad de radiación recibida (cuanto mayor sea esta cantidad mayor será la corriente que conduzca el transistor y viceversa). Si el objeto es de un color oscuro (por ejemplo, negro) entonces los rayos quedan prácticamente absorbidos, por lo que al fototransistor llega un flujo infrarrojo escaso. Esto hace que el fototransistor tienda a disminuir la corriente que circula por él. La distancia de detección del CNY70 (distancia d, en la figura 2.2), o lo que es lo mismo la distancia mínima recomendada por el fabricante para que la radiación infrarroja rebote y llegue al fototransistor es de 0,3mm. Por tanto, el objeto a detectar deberá estar al menos a José Ignacio Suárez Marcelo 6 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica 0,3mm de distancia del sensor. Distancias mayores implican una detección menos eficaz. La práctica aconseja que la distancia entre el objeto y el detector debe ser del orden de varios milímetros (máximo de 8 ó 10 mm). Figura 2.2 Funcionamiento del sensor infrarrojo CNY70. Estos sensores pueden ser usados en robótica para que, por ejemplo, un vehículo sea capaz de seguir un camino de color negro sobre fondo blanco. En la figura 2.3 se observa un microbot construido en la Escuela de Ingenierías Industriales de la Universidad de Extremadura que, gracias al empleo de los CNY70, es capaz de transportar mercancías de un lugar a otro siguiendo un camino de color negro dispuesto en un suelo de color blanco. Figura 2.3 Microbot siguiendo una línea negra gracias al uso de sensores infrarrojos CNY70. José Ignacio Suárez Marcelo 7 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica O también podría detectarse la velocidad de giro de un eje según se refleja en la figura 2.4. En ella aparece un disco codificado con sectores blancos y negros que generalmente se une al eje cuya velocidad se quiere medir. Este disco al girar delante del sensor infrarrojo producirá una serie de pulsos que si son contados durante un tiempo determinado o si se mide su periodo, darán la velocidad de giro del eje. Figura 2.4 Sensor CNY70 junto a un disco codificado usado para calcular la velocidad de un eje de giro. Los sensores CNY70 pueden ser conectados a un microcontrolador según indica la figura 2.5. En ella se observa que la señal de salida se toma en el emisor del transistor, entonces cuando se refleje luz de un objeto que llegue a dicho transistor, este tenderá a conducir corriente y en su emisor habrá una tensión próxima a los 5V. A la salida de la puerta inversora se obtendrá, por tanto, un nivel bajo. Por contra, si no se recibe luz reflejada el transistor se cortará y la resistencia de 47K marcará un nivel bajo en el emisor, con lo que a la salida de la puerta inversora habrá un nivel alto. Es necesario que esta puerta sea del tipo trigger schmitt, de esta forma se consigue conformar las señales. Se puede usar el circuito integrado 40106 que trae seis puertas inversoras de este tipo. José Ignacio Suárez Marcelo 8 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Figura 2.5 Conexión de un sensor CNY70 a un microcontrolador. En la figura 2.6 se observa la característica de transferencia de una puerta de tipo trigger schmitt. Supóngase que la señal de salida está a nivel alto (+5V). En esta situación si la señal de entrada supera el valor Vsup la salida conmutará a nivel bajo y permanecerá en dicho estado hasta que la entrada no baje por debajo de Vinf. De esta forma existe un margen de tensiones, comprendido entre Vinf y Vsup, en el que la entrada puede variar (debido, por ejemplo, a ruido o a pequeños cambios en los niveles de reflexión) sin que la salida cambie de estado. Figura 2.6 Característica de transferencia de una puerta inversora de tipo trigger schmitt. José Ignacio Suárez Marcelo 9 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica 3. SENSORES FINALES DE CARRERA. Los finales de carrera o también llamados a veces bumpers son utilizados para detectar la presencia de obstáculos por contacto, por ejemplo una pared, otro robot, etc. Según se aprecia en la figura 3.1 están formados internamente por un conmutador mecánico que lleva unido a un vástago que sobresale del sensor y, externamente, posee una laminilla metálica flexible. Dispone de tres terminales: el común (CM), el normalmente cerrado (NC) y el normalmente abierto (NA). Cuando se presiona la lámina externa ésta hunde el vástago hacia el interior y se produce la conmutación del circuito NC al NA. Cuando se deja de presionar la laminilla el vástago recupera su posición original y el circuito conmuta de nuevo de NA a NC. Figura 3.1 Aspecto de un sensor final de carrera y su circuito eléctrico con la identificación de los pines. Este sensor puede ser unido a un microcontrolador según el esquema electrónico de la figura 3.2. El terminal NA va conectado a la tensión de alimentación, mientras que el terminal NC se lleva a masa. El terminal común, sin embargo, se lleva a una de las entradas del microcontrolador, pero a través de un circuito acondicionador formado por la resistencia de 47K y la puerta inversora (aconsejable de tipo trigger schmitt para conformar los niveles, por ejemplo CD40106). Su funcionamiento es el siguiente: cuando la laminilla esté libre (cuando no se detecte ningún obstáculo) el circuito permanecerá como se indica en la figura 3.2., es decir con la entrada de la puerta inversora a nivel bajo y, por tanto, con la salida a nivel alto. Cuando algún objeto presione sobre la lámina, el sensor conmutará de NC a NA, José Ignacio Suárez Marcelo 10 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica marcando un nivel alto a la entrada del inversor, haciendo que la salida se sitúe a nivel bajo. De esta forma sabremos de la presencia o no de algún obstáculo frente al robot. La resistencia de 47K proporciona un camino permanente a masa para la entrada de la puerta inversora, de esta forma se garantiza que la entrada nunca quede flotante, ya que si no se vería afectada por cualquier ruido. Figura 3.2 Conexión de un sensor final de carrera a un microcontrolador. Un problema que puede afectar a este sensor y a cualquier otro conmutador mecánico es el de los rebotes. Cuando el sensor conmuta de una posición a otra, en el instante de apertura o cierre se produce un chisporroteo entre los terminales lo que provoca que, durante algunos milisegundos, la señal de entrada al microcontrolador esté “rebotando” entre la alimentación y la masa (figura 3.3). Figura 3.3 Rebotes en la señal debido a la conmutación de un conmutador electromecánico. Este efecto debe ser tenido en cuenta, ya que el microcontrolador suele operar a elevada velocidad (ejecuta instrucciones del orden de microsegundos o menos) y podría interpretar, al leer el sensor, que se han producido varias detecciones y varias no detecciones cuando en realidad sólo se ha producido una. Existen soluciones hardware José Ignacio Suárez Marcelo 11 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica para resolver este problema, pero generalmente se recurre a una solución software, que consiste en generar un retardo de varios milisegundo (entre 10 y 20 ms) en cuanto se detecte la primera conmutación. José Ignacio Suárez Marcelo 12 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica 4. SENSOR DE TEMPERATURA LM335A. El LM335A es un sensor de temperatura de precisión integrado que puede ser fácilmente calibrado (figura 4.1). Funciona de forma similar a un diodo Zener de dos – terminales, fijando un voltaje determinado entre dos de sus terminales (V+ y V ). La variación de este voltaje es directamente proporcional a la temperatura absoluta a razón de +10 mV/K. Opera con unos márgenes de temperatura que oscilan entre –40ºC y +100ºC y con un error típico menor de 1ºC cuando se encuentra calibrado a 25ºC. Funciona con corrientes que van desde 450 µA hasta 5 mA sin que se vea alterado su funcionamiento. Figura 4.1 Encapsulado de tipo TO92 para el sensor de temperatura LM335A. Un circuito de aplicación sencillo es el mostrado en la figura 4.2. donde se aprecia el sensor conectado a la alimentación a través de la resistencia R1, que limita la corriente absorbida por el LM335A. Esta corriente no debe ser excesiva ya que ello haría que se autocalentara el sensor por efecto Joule, disminuyendo la precisión. Según el fabricante, dicha corriente debe estar comprendida entre 450 µA y 5 mA (como valor típico se suele coger 1 mA). La salida del sensor puede ser llevada a una de las entradas de conversión A/D de un microcontrolador. Por otro lado, se observa un potenciómetro de 10K cuyo cursor se encuentra conectado a la entrada de ajuste del sensor. Con él se puede calibrar la pendiente de variación del voltaje con la temperatura (sensibilidad), según se verá a continuación. José Ignacio Suárez Marcelo 13 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica La tensión de salida del sensor (con o sin calibrar) viene dada por la expresión: VO = Vref T Tref donde, – Vo ≡ tensión de salida (entre los terminales V+ y V ) Vref ≡ tensión de salida a una temperatura de referencia Tref ≡ temperatura de referencia (en Kelvin) T ≡ temperatura real (desconocida) Figura 4.2 Conexión del sensor de temperatura LM335A a un microcontrolador. Normalmente la salida se calibra para una sensibilidad de +10mV/K. Esto quiere decir que a 25ºC (298K) habrá que ajustar el potenciómetro para que a la salida se obtenga una tensión de 2.98V. Como estas condiciones no se darán habitualmente, lo que se ha de hacer es medir la temperatura ambiente T y calcular, según la ecuación anterior, la tensión de salida que se debe obtener. Por ejemplo, si se mide una temperatura de 18ºC (291K), habrá que ajustar el potenciómetro para que a la salida se obtenga una tensión de 2.91V. Con estos datos, Vref = 2.98V a 25ºC, corriente inversa 1 mA y alimentación a +5V, se puede calcular fácilmente que la resistencia R1 deberá tener un valor aproximado de 2K. José Ignacio Suárez Marcelo 14 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica 5. CIRCUITO ACONDICIONADOR PARA EL MANEJO DE MOTORES. Para poder manejar un motor de corriente continua desde un microcontrolador hace falta un circuito especial de acondicionamiento de las señales. Un circuito muy usado para motores de pequeña potencia es el L293B fabricado por la empresa SGS Thomson Microelectronics (figura 5.1.a). Se presenta en un encapsulado de plástico DIP de 16 pines y está constituido por cuatro canales, con etapas de salida de tipo push-pull (figura 5.1.b), capaces de entregar una corriente de 1A cada uno. Cada uno de estos canales es controlado por sendas entradas lógicas compatibles TTL, por lo que pueden ser conectadas al microcontrolador sin ningún tipo de problemas. Figura 5.1 Esquema interno del acondicionador L293B y sus etapas de salida. Cada par de canales posee una entrada de inhibición (pines 1 y 9, respectivamente) que posibilitan la desconexión de los transistores de las etapas de salida. Cuando una de estas entradas está a nivel alto, la salida queda habilitada, pero si se pone a nivel bajo la salida se inhibe. Con los canales habilitados, la salida de cada canal se situará al mismo valor lógico que el de su entrada correspondiente, pero si se deshabilitan las salidas quedarán en estado de alta impedancia, es decir, como si estuvieran al aire sin conectar. José Ignacio Suárez Marcelo 15 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Existen dos tipos de alimentaciones en el L293B: una para la lógica (VSS, pin 16), típicamente a +5V, y otra para las salidas (VS, pin 8), que será la misma que alimente a los motores conectados. La conexión de uno o varios motores a este circuito integrado puede ser realizada de varias formas. Por ejemplo, se pueden conectar sendos motores de DC a cada uno de los canales (figura 5.2). En este caso sólo se pueden activar los motores en un solo sentido. Obsérvese que se han dispuesto diodos de libre circulación (por ejemplo, 1N4001 o similar) junto a cada motor. Cuando se corta la alimentación a un motor por sus bobinados tiende a seguir circulando corriente. Si esta corriente no encuentra un camino libre por donde circular, se produce un corte brusco de la misma, lo que provoca un aumento repentino de la tensión en bornas del motor, que puede dañar a los componentes circundantes. Para evitarlo se disponen los mencionados diodos, con el fin de que la corriente encuentre un camino por donde circular y no se corte de forma brusca. Figura 5.2 Conexión de cuatro motores de DC al L293B con un solo sentido de giro. José Ignacio Suárez Marcelo 16 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Si se quiere disponer de la posibilidad de cambiar el sentido de giro de los motores habría que conectarlos según se indica en la figura 5.3., pero con la limitación de poder conectar tan sólo dos motores. Esta configuración recibe el nombre de puente en H. Suponiendo activadas las entradas de habilitación, si las entradas A y B de ambos motores se activan al mismo nivel lógico (0 ó 1) los motores no girarán. Pero si se ponen a niveles lógicos distintos, por ejemplo, A en alto y B en bajo, los motores girarán en un sentido, y si intercambian dichos valores, A en bajo y B en alto, girarán en sentidos opuestos. A esta configuración se la conoce como puente en H. Figura 5.3 Conexión de dos motores de DC al L293B con doble sentido de giro. Nótese como para cada motor se han dispuesto cuatro diodos de libre circulación. En este caso, en el momento de la desconexión del motor habrá que garantizar la libre circulación de corriente tanto si el motor gira en un sentido como en el otro. José Ignacio Suárez Marcelo 17 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica 6. MOTORES DE CORRIENTE CONTINUA. Un motor de corriente continua está formado por dos partes: − una parte fija llamada estator, en la que se aloja generalmente el inductor − y otra parte móvil llamada rotor, en la que se coloca el inducido. El inductor, que para motores pequeños generalmente está formado por un imán, genera un campo magnético fijo en cuyo interior se sitúa el inducido, que es el conjunto de espiras arrolladas sobre las que se produce la actividad mecánica característica del motor (figura 6.1). Figura 6.1 Inducido de un motor de corriente continua donde se aprecian las espiras bobinadas, los dientes y ranuras, y en primer plano las delgas ennegrecidas a causa del rozamiento con las escobillas. Para que el motor funcione se le ha de aplicar una fuente externa de corriente continua que hará que por las espiras del inducido circule una corriente I (figura 6.2). Un tramo de conductor de una espira por la que circule una corriente I, en presencia de un campo magnético B perpendicular a la corriente, es objeto de dos fenómenos: − una fuerza mecánica F, perpendicular a I y B, que hará que la espira tienda a girar sobre sí misma. − y una fuerza electromotriz E (otras veces llamada fuerza contraelectromotriz), que tiende a oponerse a la excitación externa U. José Ignacio Suárez Marcelo 18 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Figura 6.2 Principio de funcionamiento de un motor de corriente continua. Con el rotor girando, cuando la espira se sitúe de forma perpendicular al campo será necesario invertir el sentido de la corriente, ya que de lo contrario al avanzar un poco más la espira las corrientes se encontrarán con campos magnéticos de sentido contrario y el sentido de la fuerza se invertirá, tendiendo a parar al rotor (figura 6.3). Por el contrario, al conmutar la corriente cambia el sentido de la fuerza F (no así su dirección), por lo que la espira seguirá rotando. Esta conmutación de la corriente se lleva a cabo en el colector, que es un anillo metálico partido en segmentos llamados delgas, que gira solidario al rotor (figura 6.2). La alimentación de la espira se hace a través de dos escobillas que tocan el colector. En realidad, hay más de una espira devanadas sobre el eje de rotación del motor, que forman los bobinados del inducido. De esta forma se aumentan los efectos y fuerzas del campo magnético. José Ignacio Suárez Marcelo 19 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Figura 6.3 Conmutación de la corriente en las espiras del inducido de un motor de CC. El circuito equivalente de un motor de corriente continua de imán permanente es el que se muestra en la figura 6.4. En él se observan los siguientes datos: U ≡ tensión de alimentación del motor I ≡ corriente de excitación en los bobinados R ≡ resistencia de los bobinados L ≡ inductancia de los bobinados E ≡ fuerza contraelectromotriz José Ignacio Suárez Marcelo 20 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Figura 6.4 Circuito equivalente de un motor de CC de imán permanente. Para un motor de imán permanente el par mecánico de rotación que hace que el bobinado gire viene dado por la expresión: T = kt ⋅I siendo kt la constante del par de rotación. Por otro lado, la fuerza contraelectromotriz generada es directamente proporcional a la velocidad de rotación n, según la ecuación: E = ke ⋅ n donde ke es la constante de la f.e.m. En el circuito equivalente del motor se desprecia la inductancia L de los bobinados ya que en CC no interviene, por tanto se tiene: I= U − E U − ken = R R Entonces, el par de rotación se puede expresar como: T= José Ignacio Suárez Marcelo kt (U − k e n ) R 21 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Esto quiere decir que las gráficas que representan el par mecánico T frente a la velocidad de rotación n son líneas rectas correspondientes a diversos valores del voltaje de alimentación U (figura 6.5). Figura 6.5 Curvas par-velocidad en un motor de CC de imán permanente. Como se deduce de las ecuaciones y las gráficas, el par de rotación inicial, es decir, el par cuando n = 0 es directamente proporcional al voltaje aplicado. La velocidad de rotación sin carga (T = 0) es directamente proporcional al voltaje de alimentación y el par de rotación disminuye al aumentar la velocidad, aunque de forma escasa. José Ignacio Suárez Marcelo 22 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica BIBLIOGRAFÍA. Libros relacionados. [1] Pallás Areny R., “Sensores y Acondicionadores de Señal” Marcombo (1994). [2] Angulo Usategui J. M., Romero Yesa S., Angulo Martínez I., “Microbótica. Tecnología, Aplicaciones y Montaje Práctico” Paraninfo (2000). [3] Hans T., Filippini J., Guyenot P., “Regulación Digital Electrónica. Servocontroles y Servomecanismos” Paraninfo (1994). [4] Bolton W., “Mecatrónica. Sistemas de Control Electrónico en Ingeniería Mecánica y Eléctrica” Marcombo 2ªEd. (2001). José Ignacio Suárez Marcelo 23 Escuela de Ingenierías Industriales (UEx) Sensores y Actuadores en Microbótica Direcciones de Internet relacionadas. • Área de Ingeniería de Sistemas y Automática del Departamento de Electrónica e Ingeniería Electromecánica de la Universidad de Extremadura. http://eii.unex.es/isa/ • The MIT Artificial Intelligence Laboratory: The Mobot Group. http://www.ai.mit.edu/projects/mobile-robots/ • Instituto de Automática Industrial (IAI). http://www.iai.csic.es/ • Instituto de Automática y Robótica de Sevilla. http://hercules.us.es/IAR/ • Jet Propulsion Laboratory (JPL) Robotics. http://robotics.jpl.nasa.gov/ • The Robotics Institute of The Carnegie Mellon University. http://ri.cmu.edu/ • Mobile Robotics Lab. University of Michigan. http://www.engin.umich.edu/research/mrl/index.html • Libros sobre robótica. http://www.robotbooks.com • Robocup: Concurso de equipos de fútbol con robots móviles. http://robocup2000.org/ José Ignacio Suárez Marcelo 24