Capítulo 3
Anuncio

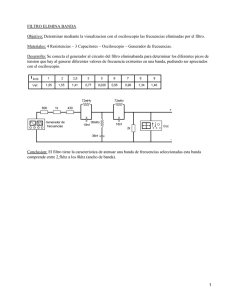
Amplificador de Instrumentación Un requisito de procesamiento de señales común es el formar la diferencia entre dos señales y amplificar el resultado por un nivel de ganancia arbitrario. El amplificador diferencial es capaz de realizar esta operación. Figura 1: El amplificador diferencial de circuito cerrado balanceado. Pero el amplificador diferencial de circuito cerrado balanceado tiene varias limitaciones. 1. Las impedancias de las entradas de las señales de entrada son finitas. 2. El rechazo de modo común es una función crítica de las resistencias externas conectadas al circuito, y si hay variaciones en los valores de las cuatro resistencias se degradará el rechazo de modo común. O sea, este amplificador no tiene un buen rechazo de modo común (CMRR) y esto es bien importante en ambientes con mucho ruido. 3. Para poder ajustar la ganancia del circuito es necesario ajustar dos resistencias, por lo tanto se complica el requisito de balance que debe existir. Un circuito que realiza esta operación (de formar la diferencia entre dos señales de entrada y amplificar el resultado) es el amplificador de instrumentación. Este amplificador está disponible en circuitos integrados donde sus valores de resistencias fijas son establecidas por el manufacturero a un grado alto de precisión. Por lo tanto, estos dispositivos son bien balanceados, son amplificadores de alta calidad y tienen razón de rechazo de modo común (CMRR) bien altos (típicamente 120 dB o más). -9- ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 12 of 23 Capítulo 3 Capítulo 3: Filtros Activos I. Filtros activos Filtro – un circuito que produce una respuesta en frecuencia dada, por el cual el principal objetivo es el pasar ciertas frecuencias mientras se rechazan otras. A. Clasificación de filtros 1. Filtros pasivos y filtros activos Los filtros pasivos consisten de una combinación de resistores, capacitores e inductores. A frecuencias bajas, este tipo de filtro exhibe problemas con los inductores ya que a frecuencias bajas éstos son grandes. Debido a que las pérdidas internas de un inductor aumentan con su tamaño, a frecuencias bajas exhiben muchas pérdidas degradando de esta forma la respuesta del filtro. Los filtros activos consisten de combinaciones de resistencias, capacitancias y de otros dispositivos activos (por ejemplo, op-amps) con retroalimentación. Debido a que no requieren inductores, pueden ser utilizados a frecuencias bajas y su respuesta en frecuencia se aproxima a la forma ideal. Desventajas: (a) potencia es requerida para que pueda operar, y (b) debido a que utilizan retroalimentación, existe la posibilidad de inestabilidad. 2. Clasificación de bandas (Tipos de filtros) Hay 4 clasificaciones: (a) filtro pasa baja (b) filtro pasa alta (c) filtro pasa banda (band-pass) (d) filtro rechaza banda ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 13 of 23 Capítulo 3 Figura 1: Respuesta ideal para (a) filtro pasa baja, (b) filtro pasa alta, (c) filtro pasa banda, (d) filtro rechaza banda. ¾ fc es la frecuencia de corte, fo es la frecuencia de centro y B es el ancho de banda (“bandwidth”). Para un filtro pasa baja ideal, la respuesta en frecuencia en amplitud para f<fc es unitaria, por lo tanto las frecuencias en este rango son pasadas por el filtro. Sin embargo, para f>fc, la respuesta en amplitud es cero, por lo tanto las frecuencias en este rango son completamente eliminadas por el filtro. Un filtro pasa alta ideal realiza la función inversa que el filtro pasa baja: deja pasar todas las frecuencias sobre la frecuencia de corte fc, mientras que las frecuencias por debajo de fc son rechazadas. El filtro pasa banda (band-pass) ideal deja pasar frecuencias que caen dentro de la banda mientras que rechaza los componentes de frecuencia que están por debajo del extremo de la banda inferior o sobre el extremo de la banda superior. El filtro rechaza banda ideal deja pasar todas las frecuencias excepto aquellas frecuencias que están dentro de cierta región. Los filtros reales no poseen las características Un filtro real pasa baja es mostrado en la regiones: (1) banda de paso (pass band) frecuencias que son transmitidas a través del ideales presentadas. figura 2. Tiene 3 – es el rango de filtro, (2) banda de ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 14 of 23 Capítulo 3 rechazo (stop band) – rango de frecuencias que son rechazadas, y (3) banda de transición. Figura 2: Filtro pasa baja real. 3. Clasificación de filtros Otra clasificación es según su respuesta en amplitud (forma): a) Respuesta Butterworth La forma de la característica de amplitud de Butterworth es ilustrado en la figura 3. A esta respuesta también se le conoce como “maximally flat amplitude response”. La respuesta disminuye a medida que la frecuencia aumenta. Figura 3: Filtro pasa baja Butterworth. b) Respuesta de Chebyshev La respuesta de Chebyshev es referida como la respuesta “equiripple” porque la banda de paso es caracterizada por una serie de ripples que tienen niveles iguales máximos y mínimos. El número de ripples es una función del número de los elementos reactivos en el diseño. Los filtros Chebyshev decaen más rápidamente que los filtros de Butterworth, por lo tanto los filtros de Chebyshev pueden lograr mayor atenuación en la banda de rechazo para un número dado de elementos reactivos. Pero la desventaja que tiene este tipo de filtro es que ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 15 of 23 Capítulo 3 tienden a exhibir el efecto de ringing (oscilaciones) debido a los ripples. Figura 4: Filtro de Chebyshev pasa baja. B. Filtros Butterworth 1. Número de polos Un parámetro común usado es el orden del filtro o el número de polos (n). El orden o el número de polos es el número de elementos reactivos no-redundantes en el circuito. Tanto los inductores como los capacitores son elementos reactivos pero dado el hecho de que los filtros activos no contienen inductores, el orden o el número de polos para un filtro activo es igual al número de capacitores no-redundantes. Para un tipo de filtro dado, el “performance” generalmente se aproxima más a la característica ideal a medida que el número de polos aumenta. Por lo tanto, un filtro de un orden alto tendrá una banda de paso más plana y mayor atenuación en la banda de rechazo que un filtro que tiene un orden menor. 2. Filtro Pasa-Baja Butterworth Si n representa el orden o el número de polos, la respuesta en frecuencia H(f) de un filtro pasa baja de Butterworth es: Ho H( f ) = 2n 1 + ( f / fb ) Cuando la respuesta de amplitud ha disminuído a 1/ 2 de su nivel máximo de la banda de paso, corresponde a que la respuesta ha disminuído 3 dB. A esta frecuencia se le llama la frecuencia de corte (fb). El valor máximo de H(f) ocurre a f = 0, H(0) = 1. La gráfica de la función de transferencia se muestra a continuación: ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 16 of 23 Capítulo 3 Figura 5: Magnitud de la función de transferencia vs. frecuencia para un filtro pasa baja Butterworth. La implementación Sallen-Key de segundo orden de un filtro pasa baja se muestra en la siguiente figura: Figura 6: Magnitud de la función de transferencia vs. frecuencia para un filtro pasa baja Butterworth. La frecuencia de corte se determina de la siguiente forma: 1 fb = 2πRC Usualmente se desea diseñar a una frecuencia en particular y por lo general se trata de seleccionar valores de capacitancias pequeños para disminuir el tamaño y el costo del circuito. Desafortunadamente si se ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 17 of 23 Capítulo 3 toman valores demasiado de pequeños, entonces se necestarán resistencias con valores muy altos. Se seleccionará primero el valor del capacitor y luego el del resistor ya que existe en el mercado mayor disponibilidad para los resistores que para loscapacitores. La ganancia dc es K (amplificador no invertidor). Este valor debe ser menor que 3 para evitar oscilaciones (inestable si es 3 o más). Se debe seleccionar valores de R de tal forma que: Rf ║(K-1)Rf =2R Para obtener un filtro de orden n, se necesitarán n/2 etapas en cascada con determinados valores para K. Orden 2 4 6 8 K 1.586 1.152 2.235 1.068 1.586 2.483 1.038 1.337 1.889 2.610 Tabla 1: Valores para K para filtros pasa-baja y pasa-alta Butterworth. La banda de transición disminuye a una razón de 20 x n dB/década. Cuando el orden del filtro n es impar, el filtro requerirá tantos op-amps como el orden par que le sigue. (ej. Si n es 3 usará tantos op-amp como el filtro del orden 4). Por esta razón generalmente se usa el orden del filtro par. ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 18 of 23 Capítulo 3 3. Filtro Pasa-Alta Butterworth La respuesta en frecuencia H(f) para un filtro pasa alta Butterworth está dada por: Ho H hp ( f ) = 2n 1 + ( fb / f ) La gráfica de la magnitud normalizada de la respuesta en frecuencia para un filtro pasa alta es: Figura 7: Funciones de transferencia para filtros pasa-alta normalizada. La implementación Sallen-Key de segundo orden para un filtro pasa alta es: Figura 8: Sallen-Key de segundo orden para un filtro pasa alta. ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 19 of 23 Capítulo 3 C. Respuesta de filtro pasabanda de dos polos Una manera de diseñar filtros pasa banda es interconectando un filtro pasa baja con un filtro pasa alta siempre y cuando fL νfH (“wideband bandpass filter”). 1. Delyannis-Friend Bandpass Circuits Si el bandwidth del filtro pasa banda es pequeño en comparación con la frecuencia central del mismo se usan otros circuitos para cumplir con las especificaciones del filtro. Uno de estos circuitos es Delyannis-Friend Bandpass el cual es un filtro de orden n igual a 2. Figura 9: Filtro Pasa-Banda Delyannis-Friend de segundo orden. ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera Page 20 of 23 Capítulo 3 La frecuencia central (fo), la magnitud de la ganancia en la frecuencia central (Ho), el bandwidth (B) y el factor de calidad (Q) del filtro se determinan con las siguientes ecuaciones: 1 fo = 2πC Ho = B= Q= (R1 || R2 )R3 R3 2 R1 1 πR3 C fo 1 = B 2 R3 R1 || R2 Para diseñar el filtro se utilizan las siguientes fórmulas: Q R3 = πf o C R1 = R3 2H o R2 = R3 4Q − 2 H o 2 A medida que Q aumenta el filtro se hace más selectivo, por lo tanto el ancho de banda se hace más estrecho para una frecuencia central dada. Para valores pequeños de Q la respuesta decae lentamente a ambos lados de fo. Para valores de Q altos, la respuesta decae más rápidamente a ambos lados de fo. ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera II. Page 21 of 23 Capítulo 3 Filtros Butterworth de primer orden Un filtro pasa baja Butterworth con ganancia dc unitaria de orden n tiene una ganancia como función de frecuencia de: 1 Disminuye: G= 2n -6n dB/octava 1 + ⎛⎜ f ⎞⎟ -20n dB/década ⎝ fc ⎠ A. Filtro Pasa-Baja de primer orden o La ganancia del filtro está dada por: V Z R 1 1 1 = Go = Go G= o =− 2 =− 2 Vi Z1 R1 1 + j 2πfCR2 1 + j 2πfCR2 1 + j( f / f c ) donde: Go = la ganancia a frecuencias bajas = -R2 / R1 fc = frecuencia por la cual la magnitud de la ganancia es 0.707 del máximo 1 fc = 2πCR2 o La fase de Vo relativo a Vi es: φ = − tan f fc ELEN 4327 – Instrumentación y Medición Prof. C. González Rivera B. Page 22 of 23 Capítulo 3 Filtro Pasa-Alta de primer orden o La frecuencia de corte es: fc = C. 1 2πCR1 Filtro Pasa-Banda de primer orden o Las frecuencias de corte son: f c1 = 1 2πC1 R1 f c2 = 1 2πC 2 R2 5/31/2007 Con eptos Generales Conceptos Gene ales Amplificadores Operacionales OP-AMP OPProf. Caroline González ELEN 4327 Esquemático de un OPOP-AMP 1 5/31/2007 Símbolo de un OPOP-AMP • • • • • v+ = entrada no-invertidora v- = entrada invertidora vd = voltaje diferencial = v+ - vvout = salida ±V = ±Vcc = suplidores de potencia (“bias”) Característica de entrada y salida Vout Región de Saturación Vcc Vd Región Lineal -Vcc Región de Saturación • ± Vcc establece los voltajes máximo y mínimo en la salida (± (±Vsat). 2 5/31/2007 Modelo Ideal vs. Práctico • Valores típicos para dos OPOP-AMPs Parámetro 741 411 Rin 2 MΩ 1 TΩ Ro 50 Ω 50 Ω 2x Av 105 2 x 105 Diseño de un circuito acondicionador de señales 0°C LM335 VT Vo 2 73 V 2.73 0V CAS (sensor) 50°C 3.23 V 5V Microcontrolador 15 V 100kohm 10kohm 10kohm + LM 335 VT - 10kohm 2 10kohm 741 -3 1 VT 2 54.9kohm 741 3 1 + + 10kohm 15 V Vo - 3 5/31/2007 Diseño de un detector de humo Diseño de un convertidor de análogo a digital (A/D) 4