Hoja de datos MacroPLC
Anuncio

CPU:
• Sistema Operativo
Integrado Para PLC
• Arquitectura Micro
controlada Reduce Costos
• Boot Loader Serie RS232
Características:
• E/S Digitales Aisladas
• Interfase Serie Aislada
• Entrada Analógica
• Software de programación y
Simulador
Periféricos (ver Anexo I):
• Lógica Controladora de
Motor PAP, Seteando Pasos
y Velocidad (ver Anexo II)
• Regulación de Voltaje del
Micro
• Opto acopladores en
Entradas e interfase, Relés
en las Salidas
• Conectores E/S,
Alimentación 12v y
Programación Serie (ver
Anexo III).
INSTRUCCIONES:
NOP
OUT
SET
RST
TON
TOF
CTU
CTD
Normal Abierto
CONTACTOS
Operadores: Cualquier registro
Normal Cerrado
Operadores: Cualquier registro
Flanco Ascendente
Operadores: Entradas, Salidas, Relés RAM y ROM
Flanco Descendente
Operadores: Entradas, Salidas, Relés RAM y ROM
Menor o Igual
Op1 y Op2: Cualquier registro o Literal
Distinto
Op1 y Op2: Cualquier registro o Literal
Igual
Op1 y Op2: Cualquier registro o Literal
Mayor o Igual
Op1 y Op2: Cualquier registro o Literal
Punto Conexión Serie
Equivalente a Conexión Eléctrica Serie
Punto Conexión Paralelo
Equivalente a Conexión Eléctrica Paralelo
ACCIONES BASICAS
No Operación
No realiza operación alguna
Salir
Copia en operando el valor lógico del nodo
Setear
Si el nodo tiene valor 1, Activa el operando
Resetear
Si el nodo tiene valor 0, Desactiva el operando
Timer Retardo Conexión
Cuando el nodo pasa a valor 1, Comienza el conteo de tiempo
para conectar, con el tiempo definido en Operando, Si el nodo
pasa a 0, reinicia el conteo
Timer Retardo Desconexión.
Cuando el nodo pasa a valor 0, Comienza el conteo de
tiempo para desconectar, con el tiempo definido en Operando,
Si el nodo pasa a 1, reinicia el conteo
Incrementar un Contador
Incrementa en una unidad el contador definido en Operando
Decrementar un Contador
Decrementa en una unidad el contador definido en Operando
REGISTROS
RESERVADOS
ENTRADA
ANALOGICA
(RSV 01)
LDA
OUTA
INCA
DECA
INVA
ROTLA
ROTRA
FUNCIONES
HORARIAS
(Hora: RSV13)
(Minuto: RSV14)
(Segundo: RSV15)
SHFLA
SHFRA
ANDA
ORA
MOTOR PAP
Duración Pulso:
(RSV10)
Pasos Derecha
(RSV11)
Pasos Izquierda
(RSV12)
XORA
ADDA
SUBA
MULA
DIVA
OPERACIONES MATEMATICAS
Cargar en Acumulador
Carga en el registro de trabajo numérico (Acumulador), el
valor definido en Operando
Salida del Acumulador
Carga en Operando el valor actual del Acumulador
Incrementar el
Incrementa en una unidad el valor almacenado en
Acumulador
Acumulador
Decrementar el
Decrementa en una unidad el valor almacenado en
Acumulador
Acumulador
Invertir el Acumulador
Realiza en el valor del Acumulador la operación matemática
Complemento
Rotar hacia la izquierda los Rotar hacia la izquierda los bits del Acumulador, y el de
bits del Acumulador
mayor peso pasa a ser el de menor.
Rotar hacia la derecha los
Rotar hacia la derecha los bits del Acumulador, y el de
bits del Acumulador
menor peso pasa a ser el de mayor.
Desplazar hacia la
Equivale a multiplicar por 2, desprecia el acarreo
Izquierda los bits del
Acumulador
Desplazar hacia la Derecha Equivale a dividir por 2, desprecia el resto
los bits del Acumulador
Lógica de bits Y
Realiza la operación matemática binaria Y entre el
Acumulador y el Operando
Logica de bits O
Realiza la operación matemática binaria O entre el
Acumulador y el Operando
Logica de bits O Exclusivo Realiza la operación matemática binaria XOR entre el
Acumulador y el Operando
Suma al Acumulador
Suma al valor del Acumulador por el definido en Operando
Resta del Acumulador
Resta del valor del Acumulador el definido en Operando
Multiplica al Acumulador
Multiplica el valor del Acumulador por el definido en
Operando
Divide el Acumulador
Divide el valor del Acumulador por el definido en Operando
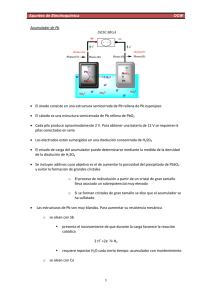
ANEXO I
Circuito de referencia, Sujeto a modificaciones
ANEXOII
MANEJO MOTOR PAP
SE USAN LOS REGISTROS RSV 10, RSV11, y RSV12.
En el ejemplo, se lee el ADC, y se
lo pone como periodo del paso
(velocidad), Si se activa la entrada
0, se hace girar 100 pasos el Motor
en un sentido, si se activa la entrada
1, se lo hace girar en el sentido
contrario, si se mantienen ambos en
simultaneo, el motor vibrara.
Pinout
A
B
C
D
GND
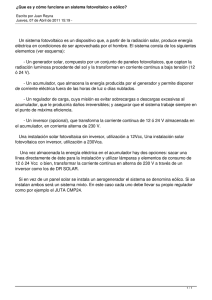
ANEXO III
BORNES Y CONECTORES
Entradas:
GND, E0, E1, E2, E3, E4, E5, E6
Iterfase
RS232
Alimentación:
GND
12V
TxPC
RxPC
GND
Pines:
GND RST GND ADC
Motor
PAP
A
B
C
D
GND
Salidas 4 Pares Contactos NA Relés:
{NA} {NA} {NA} {NA}
S0 - S1 – S2 – S3