Presentación de PowerPoint
Anuncio

UNIVERSIDAD CATOLICA ANDRÉS BELLO
1
Facultad de Ingeniería
Escuela de Telecomunicaciones
Señales y Sistemas II
Módulo III: Señales Estocásticas
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Contenido de este módulo
2
1.- Probabilidades y variables aleatorias
2.- Procesos estocásticos y promedios
3.- Estacionaridad y ergodicidad
4.- La densidad espectral de potencia
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Contenido de este módulo
3
1.- Probabilidades y variables aleatorias
2.- Procesos estocásticos y promedios
3.- Estacionaridad y ergodicidad
4.- La densidad espectral de potencia
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Axioma #1
Facultad de Ingeniería
Escuela de Telecomunicaciones
4
Sea S el espacio muestral de un experimento, entonces su
probabilidad es igual a uno: P(S) = 1
Consideremos como ejemplo el lanzamiento de un dado:
1
3
© 2004 by R.Banchs
4
5
6
2
S: el espacio muestral representa
el conjunto de todos los posibles
resultados {1, 2, 3, 4, 5, 6}
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Axioma #2
Facultad de Ingeniería
Escuela de Telecomunicaciones
5
Si A es un evento contenido en el espacio muestral S, es decir
∩
A
S, entonces: P(A) ≥ 0
Así por ejemplo, sea A el evento definido por la ocurrencia de
un número par al lanzar un dado:
P(A) = 3/6 = 1/2
© 2004 by R.Banchs
1
3
4
5
6
A
2
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Axioma #3
Facultad de Ingeniería
Escuela de Telecomunicaciones
6
Si A y B son dos eventos disjuntos (es decir A ∩ B = Ø ), que
están contenidos en el espacio muestral S, entonces:
P(A B) = P(A) + P(B)
∩
Así por ejemplo, si B es el evento definido por la ocurrencia de
un impar al lanzar un dado:
B
∩
P(A B) = 1/2 + 1/2 = 1 = P(S)
© 2004 by R.Banchs
1
3
4
5
6
A
2
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Propiedades
Facultad de Ingeniería
Escuela de Telecomunicaciones
7
Partiendo de los tres axiomas enunciados se pueden demostrar
las siguientes propiedades:
P(B ∩ A) + P(B ∩ A) = P(B)
P(A) = 1 – P(A)
© 2004 by R.Banchs
P(A
∩
P(Ø ) = 0
P(A B) = P(A) + P(B) – P(A ∩ B)
∩
P(A) ≤ 1
B) ≤ P(A) + P(B)
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Probabilidad conjunta
Facultad de Ingeniería
Escuela de Telecomunicaciones
8
Se denomina la probabilidad conjunta de dos eventos A y B
a la probabilidad del evento intersección: P(A∩ B)
• La probabilidad conjunta de dos eventos disjuntos es cero:
Si A ∩ B = Ø, entonces P(A ∩ B) = 0,
• La probabilidad conjunta de un evento y un subconjunto de
dicho evento es igual a la probabilidad del subconjunto:
∩
Si A S, entonces P(A ∩ S) = P(A)
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Probabilidad condicional
Facultad de Ingeniería
Escuela de Telecomunicaciones
9
Se denomina la probabilidad condicional de A dado B, P(A|B),
a la probabilidad de ocurrencia de el evento A teniendo como
condición el hecho de que el evento B ocurrió.
P(A|B) se calcula como el cociente de la probabilidad conjunta
de A y B entre la probabilidad de B:
P(A|B) =
© 2004 by R.Banchs
P(A ∩ B)
P(B)
, con P(B) ≠ 0
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Probabilidad condicional 10
Algunas propiedades de la probabilidad condicional:
• Si A es un subconjunto de B, entonces P(A|B) = P(A) / P(B)
• Si B es un subconjunto de A, entonces P(A|B) = 1
• Si A y B son eventos disjuntos, entonces P(A|B) = 0
• Teorema de Bayes: sean dos eventos A y B tales que P(A) ≠ 0
y P(B) ≠ 0, se cumple que: P(A|B) P(B) = P(B|A) P(A)
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.1 11
Facultad de Ingeniería
Escuela de Telecomunicaciones
• LANZAMIENTO DE UN DADO
Considera los siguientes eventos:
S = {1, 2, 3, 4, 5, 6} (todos los posibles resultados)
A = {2, 4, 6} (ocurrencia de un número par)
B = {1, 3, 6} (ocurrencia de un número impar)
C = {4, 5, 6} (ocurrencia de un número mayor que tres)
Calcula las siguientes probabilidades:
P(A|B), P(A ∩ C), P(A C), P({2}|A), P(B ∩ S)
∩
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.1 12
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA
B
1
P(A|B) = P(Ø ) / P(B) = 0
3
P(A ∩ C) = P({4,6}) = 2/6 = 1/3
P(A C) = P({2,4,5,6}) = 4/6 = 2/3
4
5
6
A
2
C
S
∩
P({2}|A) = P({2}∩ A) / P(A) = 1/6 / (1/2) = 2/6 = 1/3
P(B ∩ S) = P(B) = 3/6 = 1/2
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Independencia 13
Facultad de Ingeniería
Escuela de Telecomunicaciones
Se dice que dos eventos A y B son independientes si se cumple
que cualquier condición sobre la ocurrencia de B no tiene efecto
sobre la probabilidad de A y viceversa.
Si A y B son independientes, se cumple que: P(A|B) = P(A), lo
cual a su vez implica que: P(A ∩ B) = P(A) P(B)
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Variable aleatoria 14
Facultad de Ingeniería
Escuela de Telecomunicaciones
Se define como variable aleatoria a una función que mapea
el espacio muestral de un experimento en el conjunto de los
números reales:
S: Espacio Muestral
a
xa = X(a)
xa
© 2004 by R.Banchs
Sx: Rango de observaciones
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Variable aleatoria discreta 15
Cuando el rango de observaciones Sx = {x1 , x2 , ....} es discreto
nos referiremos a X como una variable aleatoria discreta.
pmf: función de masa probabilística P( X = xi ) = P( xi )
Σ P( x ) δ(x- x )
cdf: función de distribución cumulativa F (x) =Σ P( x ) u(x- x )
pdf: función de densidad probabilística fx(x) =
x
© 2004 by R.Banchs
i
i
i
i
i
i
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
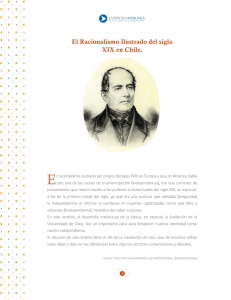
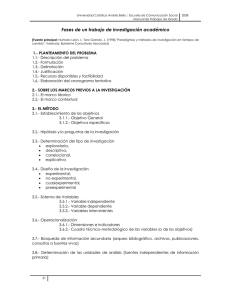
Ejemplo: lanzamiento de un dado 16
Facultad de Ingeniería
Escuela de Telecomunicaciones
Sx = {xi = i: i = 1, 2, 3, 4, 5, 6}; pmf: P( xi ) = 1/6;
6
pdf: fx(x) = 1/6
Σ δ(x- i);
i=1
Densidad probabilística (pdf)
6
cdf: Fx(x) = 1/6
Σ u(x- i)
i=1
Distribución cumulativa (cdf)
1.5
0.25
0.2
1
0.15
0.1
0.5
0.05
0
© 2004 by R.Banchs
0
2
4
6
0
0
2
4
6
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Variable aleatoria continua 17
Cuando el rango de observaciones Sx es continuo nos referiremos
a X como una variable aleatoria continua.
cdf: función de distribución cumulativa Fx(x) = P(X ≤ x)
d
pdf: función de densidad probabilística fx(x) =
Fx(x)
dx
Observación: para X continua P(X = xi ) = 0
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
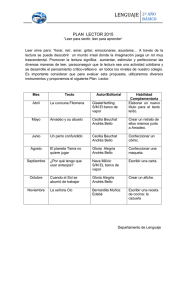
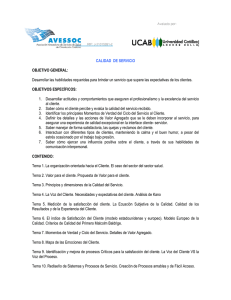
Ejemplo: variable aleatoria gaussiana 18
Facultad de Ingeniería
Escuela de Telecomunicaciones
1
exp(– x2/2)
pdf: fx(x) =
2π
1
cdf: Fx(x) =
2π
∫
x
exp(– u2/2) du
−∞
Densidad probabilística (pdf)
0.5
Distribución cumulativa (cdf)
1.5
0.4
1
0.3
0.2
0.5
0.1
0
-5
© 2004 by R.Banchs
0
5
0
-5
0
5
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Contenido de este módulo 19
1.- Probabilidades y variables aleatorias
2.- Procesos estocásticos y promedios
3.- Estacionaridad y ergodicidad
4.- La densidad espectral de potencia
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Procesos estocásticos 20
Facultad de Ingeniería
Escuela de Telecomunicaciones
Una secuencia aleatoria puede ser representada mediante un
proceso estocástico, el cual consiste en una familia indexada
de variables aleatorias: X[n] = { Xn }
Para cada valor de n, X[n] representa una variable aleatoria
con función de distribución cumulativa FX (xn ,n) = P (Xn ≤ xn)
d
y función de densidad probabilística fX (xn ,n) =
FX (xn ,n)
dxn
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Dimensiones de ensamble y tiempo 21
tiempo
realizaciones
...
X1 [n]
...
...
X2 [n]
...
...
X3 [n]
...
Xm [n]
...
...
...
...
Espacio Muestral
de la variable aleatoria X[k]
...
© 2004 by R.Banchs
...
ensamble
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Promedios en el ensamble 22
...
X1 [n]
...
...
X2 [n]
...
...
X3 [n]
...
Xm [n]
...
...
...
...
Espacio Muestral
de la variable aleatoria X[k]
...
© 2004 by R.Banchs
...
ensamble
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Valor medio ó valor esperado 23
Facultad de Ingeniería
Escuela de Telecomunicaciones
El valor esperado de un proceso estocástico Xn se define como:
E{ Xn } =
∫
∞
x fX (x ,n) dx = µx [n]
−∞
Propiedades:
• E{ Xn + Ym } = E{ Xn } + E{ Ym }
• E{ k Xn } = k E{ Xn }
• Si Xn y Ym son independientes: E{ Xn Ym } = E{ Xn } E{ Ym }
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Valor cuadrático medio y varianza 24
Facultad de Ingeniería
Escuela de Telecomunicaciones
El valor cuadrático medio de un proceso estocástico Xn se
define como:
E{ |Xn |2} =
∫
∞
|x|2 fX (x ,n) dx = msvx [n]
−∞
Y su varianza se define como:
Var{ Xn } = E{ |Xn – E{ Xn }|2} = σx2[n]
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.2 25
Facultad de Ingeniería
Escuela de Telecomunicaciones
• VARIANZA Y VALOR ESPERADO
Demuestra que la varianza y el valor esperado satisfacen
la siguiente relación:
Var{ Xn } = E{ |Xn |2} – |E{ Xn }|2
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.2 26
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA
De la definición de varianza es Var{ Xn } = E{ |Xn – E{ Xn }|2}
y desarrollando el factor cuadrático:
Var{ Xn } = E{ |Xn |2 + |E{ Xn }|2 – Xn* E{ Xn } – Xn E{ Xn }* }
Aplicando las propiedades de linealidad del valor esperado:
Var{ Xn } = E{ |Xn |2 } + |E{ Xn }|2 – E{Xn*} E{ Xn } – E{Xn } E{ Xn }*
Var{ Xn } = E{ |Xn |2 } + |E{ Xn }|2 – 2 |E{ Xn }|2
de donde finalmente:
Var{ Xn } = E{ |Xn |2 } – |E{ Xn }|2
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Autocorrelación y autocovarianza 27
• La secuencia de autocorrelación de un proceso estocástico Xn
se define como: φxx [n,m] = E{ Xn Xm*}
• La secuencia de autocovarianza se define como:
γxx [n,m] = E{ (Xn– E{ Xn }) (Xm– E{ Xm })*}, y también puede
escribirse como: γxx [n,m] = φxx [n,m] – E{ Xn } E{ Xm }*
• φxx [n,m] y γxx [n,m] miden el grado de dependencia entre los
valores de un proceso estocástico para los distintos valores de
tiempo n y m.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Crosscorrelación y crosscovarianza 28
• La secuencia de crosscorrelación para dos procesos estocásticos
Xn y Ym se define como: φxy [n,m] = E{ Xn Ym*}
• La secuencia de crosscovarianza se define como:
γxy [n,m] = E{ (Xn– E{ Xn }) (Ym– E{ Ym })*}, y también puede
escribirse como: γxy [n,m] = φxy [n,m] – E{ Xn } E{ Ym }*
• φxy [n,m] y γxy [n,m] miden el grado de dependencia entre los
valores de dos procesos estocásticos para los distintos valores
de tiempo n y m.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Promedios en el tiempo 29
Facultad de Ingeniería
Escuela de Telecomunicaciones
tiempo
...
X1 [n]
...
...
X2 [n]
...
...
X3 [n]
...
Xm [n]
...
...
...
© 2004 by R.Banchs
...
...
...
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Valor medio y autocorrelación 30
• El valor promedio temporal de una realización de un proceso
estocástico Xn se define como:
1
< Xn > = lim
L ∞ 2L+1
L
Σ
Xn
n= -L
• La secuencia de autocorrelación temporal de una realización
de un proceso estocástico Xn se define como:
1
< Xn+m Xn*> = lim
L ∞ 2L+1
© 2004 by R.Banchs
L
Σ
Xn+m Xn*
n= -L
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Contenido de este módulo 31
1.- Probabilidades y variables aleatorias
2.- Procesos estocásticos y promedios
3.- Estacionaridad y ergodicidad
4.- La densidad espectral de potencia
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Estacionaridad 32
Estacionaridad en sentido estricto: se dice que un proceso es
estacionario en sentido estricto cuando todas sus propiedades
estadísticas son independientes del tiempo.
Estacionaridad en sentido amplio: se dice que un proceso es
estacionario en sentido amplio cuando sus promedios de
primer orden son independientes del tiempo y sus promedios
de segundo orden dependen sólo de la diferencia en tiempo.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Estacionaridad en sentido amplio 33
Son los procesos estacionarios en sentido amplio los que
realmente nos interesan.
Para un proceso de este tipo siempre se cumple que:
• E{ Xn } =
∫
∞
x fX (x ,n) dx = µx [n] = µx
−∞
• Var{ Xn } = E{ |Xn – E{ Xn }|2} = σx2[n] = σx2
• φxx [n+m,n] = E{ Xn+m Xn*} = φxx [m]
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Propiedades de procesos estacionarios 34
Dados dos procesos estacionarios Xn y Yk ; se cumple que:
1.- γxx [m] = φxx [m] – | µx |2; γxy [m] = φxy [m] – µx µy2
2.- φxx [0] = E{ |Xn |2 }; γxx [0] = σx2
* [m]; φxy [-m] = φxy* [m]
3.- φxx [-m] = φxx
4.- γxx [-m] = γxx* [m]; γxy [-m] = γxy* [m];
5.- |φxy [m]|2 ≤ φxx [0] φyy [0]; |γxy [m]|2 ≤ γxx [0] γyy [0]
6.- |φxx [m]| ≤ φxx [0]; |γxx [m]| ≤ γxx [0]
7.- Si Xn=Yn-k , entonces: γxx [m] = γyy [m] y φxx [m] = φyy [m]
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ergodicidad 35
Facultad de Ingeniería
Escuela de Telecomunicaciones
Se dice que un proceso es ergódico cuando cumple las dos
condiciones siguientes:
1.- Sus promedios en tiempo < Xn > y < Xn+m Xn*> son
independientes de la realización.
2.- Sus promedios en tiempo < Xn > y < Xn+m Xn*> coinciden
con sus promedios en el ensamble µx y φxx [m].
Todo proceso ergódico es siempre también estacionario en
sentido amplio. Lo contrario no es necesariamente cierto.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Importancia de la ergodicidad 36
La ergodicidad es una propiedad deseable y sumamente
importante en el procesamiento de señales. Gracias a esta
propiedad podemos calcular los promedios en el ensamble
mediante el cálculo de los promedios en el tiempo !!!
E{ Xn } = µx = < Xn >
E{ Xn+m Xn*} = φxx [m] = < Xn+m Xn*>
Sin embargo, como vimos en la sección anterior, el cálculo
de < Xn > y < Xn+m Xn*> implica el cómputo de sendos límites
que en la práctica no es factible calcular.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Estimadores de promedios 37
En la práctica, los valores de µx , σx2 y φxx [m] se aproximan
mediante el uso de estimadores*:
1
^
µx = < x[n]>N = N
N-1
Σ
x[n]
n= 0
1
^
2
2
^
σx = < |x[n]–µx| >N = N
N-1
Σ
| x[n] – µ^x |2
n= 0
1
^
φxx [m] = < x[n+m] x[n]*>N = N
N-1
Σ
x[n+m] x[n]*
n= 0
* Existen muchos tipos de estimadores, aquí se presentan los más comúnmente usados
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.3 38
Facultad de Ingeniería
Escuela de Telecomunicaciones
• SECUENCIA ALEATORIA GAUSSIANA
Considera el proceso aleatorio discreto descrito por la
siguiente función de densidad probabilística:
fX (xn ,n) =
1
2π σx2
exp(– (x – µx )2 / 2σx2 )
Se trata de un proceso Gaussiano estacionario con valor
esperado µx y varianza σx2.
En este ejercicio vamos a ilustrar los conceptos vistos en
esta sección mediante el uso de este proceso estocástico.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
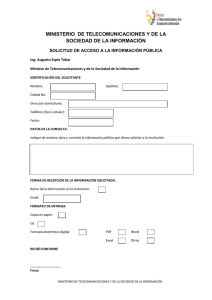
Ejercicio III.3 39
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA
Para este ejercicio consideremos µx = 3 y σx2 = 2
Generando una realización de este proceso tenemos:
Xk [n]
10
5
0
-5
© 2004 by R.Banchs
0
10
20
30
40
50
60
70
80
90
100
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
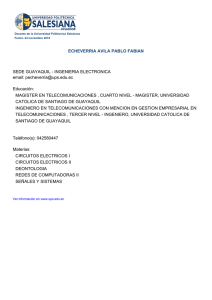
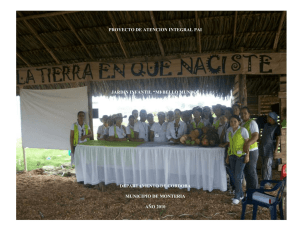
Ejercicio III.3 40
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA (continuación)
Valor esperado estimado
Ahora estimemos* el valor de µx para distintos valores de N
1
^
µx = < x[n]>N = N
4
3.5
N-1
Σ
x[n]
n= 0
3
2.5
< x[n]>2000 = 3.0059
2
1.5
0
500
1000
1500
2000
Número de muestras N
* Estamos asumiendo que el proceso es ergódico
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
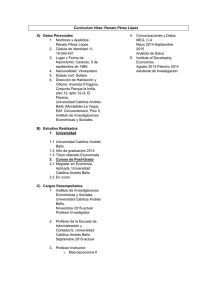
Ejercicio III.3 41
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA (continuación)
Ahora estimemos* el valor de σx2 para distintos valores de N
σ^x2 = < |x[n]–µ^x|2>N
Varianza estimada
3
2.5
2
1.5
< |x[n]–µ^x|2>2000 = 2.0390
1
0.5
0
0
500
1000
1500
2000
Número de muestras N
* Estamos asumiendo que el proceso es ergódico
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.3 42
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA (continuación)
Ahora estimemos* la secuencia de autocorrelación φxx [m]
para N = 2000
15
φ^xx [0] = 10.93822
φ^xx [m]
10
5
0
-50
-40
-30
-20
-10
0
10
20
30
40
50
* Estamos asumiendo que el proceso es ergódico
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.3 43
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA (continuación)
Ahora estimemos* la secuencia de autocovarianza γxx [m]
para N = 2000
3
γ^xx [0] = 2.0596
γ^xx [m]
2
1
0
-1
-50
-40
-30
-20
-10
0
10
20
30
40
50
* Estamos asumiendo que el proceso es ergódico
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Nota importante 44
Desde este momento en adelante, a menos que
se diga lo contrario, todo proceso estocástico
que se considere, se asumirá ergódico y por lo
tanto estacionario en sentido amplio.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Contenido de este módulo 45
1.- Probabilidades y variables aleatorias
2.- Procesos estocásticos y promedios
3.- Estacionaridad y ergodicidad
4.- La densidad espectral de potencia
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Densidad espectral de potencia 46
Por lo general la DTFT de una señal aleatoria no existe, sin
embargo, por lo general, las DTFT de sus secuencias de autocorrelación y autocovarianza si existen.
Así, se pueden definir los siguientes pares transformados:
φxx [m]
Φxx(e jω)
γxx [m]
Γxx(e jω)
Donde Φxx(e jω) se conoce con el nombre de densidad espectral
de potencia, ó simplemente, espectro de potencia.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Propiedades 47
Facultad de Ingeniería
Escuela de Telecomunicaciones
Se puede demostrar que:
∞
• Φxx(e jω) = Γxx(e jω) + 2π |µx |2
Σδ ω
( – 2π k)
k=-∞
• Si µx = 0, entonces: Φxx(e jω) = Γxx(e jω)
* (e jω)
• Φxx(e jω) es siempre real, es decir, Φxx(e jω) = Φxx
• Si φxx [m] = φxx [-m], i.e. el proceso estocástico es real,
entonces Φxx(e jω) tiene simetría par y es no negativa.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Relación con el valor cuadrático medio 48
De la ecuación de síntesis de la DTFT, se obtiene que:
φxx [m] =
1
2π
π
∫Φ
xx(e
jω)
e jω m dω
−π
De donde se obtiene, haciendo m = 0, que:
msvx = E{
© 2004 by R.Banchs
|x[n]|2}
1
= φxx [0] =
2π
π
∫Φ
xx(e
jω)
dω
−π
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Relación con la varianza 49
Facultad de Ingeniería
Escuela de Telecomunicaciones
De igual forma:
γxx [m] =
1
2π
π
∫Γ
xx(e
jω)
e jω m dω
−π
De donde se obtiene, haciendo m = 0, que:
σx2
© 2004 by R.Banchs
= E{ |x[n]–µx
|2}
1
= γxx [0] =
2π
π
∫Γ
xx(e
jω)
dω
−π
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Densidad espectral de potencia cruzada 50
También se pueden definir los siguientes pares transformados
para las secuencias de crosscorrelación y crosscovarianza de
dos procesos estocásticos Xn y Yk :
φxy [m]
Φxy(e jω)
γxy [m]
Γxy(e jω)
Donde Φxy (e jω) se conoce con el nombre de densidad espectral
de potencia cruzada.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Propiedades 51
Facultad de Ingeniería
Escuela de Telecomunicaciones
Se puede demostrar que:
∞
• Φxy(e jω) = Γxy(e jω) + 2π µx µy*
Σδ ω
( – 2π k)
k=-∞
• Si µx = 0 y µy = 0, entonces: Φxy(e jω) = Γxy(e jω)
• Φxy(e jω) es por lo general una función compleja, y se
*(e jω)
cumple que Φxy(e jω) = Φyx
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de Ingeniería
Escuela de Telecomunicaciones
Secuencias estacionarias y sistemas LIT 52
Consideremos un sistema LIT cuya entrada es estacionaria
en sentido amplio
x[n]
SISTEMA
LIT
y[n]
Se puede demostrar que entonces su salida también es estacionaria en sentido amplio.
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.4 53
Facultad de Ingeniería
Escuela de Telecomunicaciones
• CROSSCORRELACIÓN ENTRADA/SALIDA
Considera un sistema LIT cuya entrada x[n] es una
secuencia aleatoria estacionaria:
a.- Calcula la crosscorrelación entre la entrada x[n] y la
salida y[n].
b.- ¿Qué ocurre si la entrada x[n] es ruido blanco?
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.4 54
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA
Usando la definición de φxy [m] y la respuesta impulsiva h[k]
∞
φxy [m] = E{ x[n] y[n+m] } = E{ x[n]
Σ
h[k] x[n+m-k] }
k=-∞
∞
∞
φxy [m] =
Σ
h[k] E{ x[n] x[n+m-k] } =
k=-∞
Σ
h[k] φxx [m-k]
k=-∞
de donde se observa que:
φxy [m] = h[m] * φxx [m]
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Ejercicio III.4 55
Facultad de Ingeniería
Escuela de Telecomunicaciones
• RESPUESTA (continuación)
Si x[n] es ruido blanco con µx = 0 y σx2 = a, se puede demostrar
que: φxx [m] = a δ[m]
Y del resultado anterior, φxy [m] = h[m] * φxx [m], se tiene que:
φxy [m] = a h[m]
De forma que la secuencia de crosscorrelación φxy [m] entre la
entrada x[n] y la salida y[n] de un sistema LIT, cuando la x[n]
es ruido blanco, es proporcional a la respuesta impulsiva h[n].
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
56
Facultad de Ingeniería
Escuela de Telecomunicaciones
Fin del Módulo III
Señales Estocásticas
© 2004 by R.Banchs
SEÑALES Y SISTEMAS II: SEÑALES ESTOCÁSTICAS