Descripción del sistema VARIM: captación y composición
Anuncio

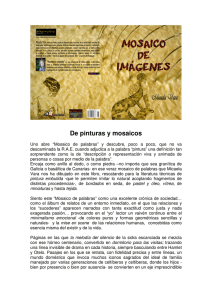
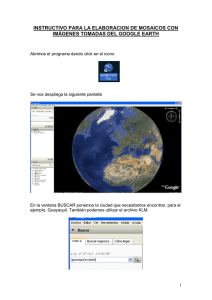
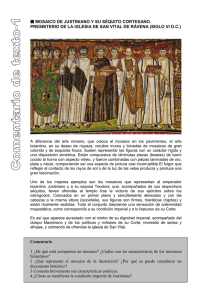
Descripción del sistema VARIM: captación y composición automática del mosaico reflectográfico Juan Torres Alberto Posse José M. Menéndez Grupo de Aplicación de Telecomunicaciones Visuales. E. T. S. Ingenieros de Telecomunicación. (UPM) Introducción A lo largo de la Historia, el arte siempre ha estado ligado con el desarrollo de la tecnología. Al tiempo que han ido apareciendo nuevas técnicas, ha ido cambiando la forma en que los artistas plasman sus ideas y sentimientos. Sin embargo, el progreso de la tecnología no ha repercutido únicamente en la creación de composiciones artísticas sino que también ha mejorado el estudio y análisis de éstas así como su conservación y restauración. Los distintos tipos de análisis ofrecen información diversa sobre las obras de arte: los avances en el campo de la química permiten, entre otras cosas, realizar un estudio exhaustivo de la composición de los materiales con los que se formaron éstas, las nuevas técnicas de análisis microscópico proporcionan cada vez más datos sobre el estado de las obras, etc. El creciente desarrollo de los sistemas informáticos, relacionado tanto con el incremento de potencia de las estaciones de trabajo como con la elaboración de librerías software, así como los avances en tratamiento de imágenes y visión artificial, proporcionan nuevos instrumentos de análisis y permiten mejorar los ya existentes. En este artículo se presenta un sistema de captación y composición del mosaico de reflectografía de infrarrojo, denominado VARIM (Visión Artificial aplicada a la Reflectografía de Infrarrojos Mecanizada). Dicho sistema permite obtener, de manera totalmente automática, la imagen completa del cuadro subyacente en una obra pictórica, haciendo uso de técnicas de visión artificial. El diseño y la implementación de esta arquitectura ha sido desarrollado conjuntamente por el Grupo de Aplicación de Telecomunicaciones Visuales de la Universidad Politécnica de Madrid y el Instituto del Patrimonio Histórico Español (IPHE)1. Así se ha fomentado una estrecha colaboración entre ambas instituciones. 89 Estado del arte en reflectografía de infrarrojos La reflectografía de infrarrojos [Van Asperen, 1970] es una técnica de análisis utilizada desde la década de los 70 y que consiste en obtener, mediante una cámara de vídeo sensible exclusivamente a la zona del infrarrojo, una serie de imágenes contiguas pertenecientes a una obra pictórica que posteriormente se unen hasta obtener una sola imagen, llamada mosaico, correspondiente a la obra completa. El hecho de utilizar varias imágenes para una sola composición se debe a la necesidad de obtener una resolución muy alta para poder Equipo del IPHE: Tomás Antelo, Miriam Bueso, Marián del Egido, Araceli Gabaldón y Carmen Vega. 1 Descripción del sistema VARIM: captación y composición automática del mosaico reflectográfico 90 Figura 1. Sistema de posicionado. apreciar todos los detalles de la obra. El mosaico final ofrece información sobre el dibujo subyacente que no es visible directamente por el ojo humano. Aunque esta técnica se lleva utilizando durante décadas, el método tradicional de adquisición y de posterior composición de imágenes entraña una serie de problemas que lo convierten en una tarea lenta y tediosa. Entre estos inconvenientes se pueden destacar: • Normalmente la tarea de adquisición se realiza de forma manual, colocando la cámara frente a la zona de la obra que se desea capturar en cada momento. Si se quiere una gran resolución en las imágenes se deben adquirir una gran cantidad de éstas, lo que implica una monótona tarea de posicionamiento y control de la cámara. • La composición de las sub-imágenes también se realiza de forma manual, seleccionando las imágenes a unir y señalando los puntos coincidentes entre dos subimágenes consecutivas. Dependiendo del número de sub-imágenes que componen cada obra, esta tarea puede suponer varias horas de trabajo monótono. • En el método tradicional se utilizan diversas aplicaciones informáticas para cada una de las etapas: adquisición, tratamiento y composición. Manejar varias aplicaciones para un mismo proceso puede ocasionar incompatibilidades entre varias y una integración de éstas en una sola facilitaría la labor del usuario. • Las imperfecciones de la cámara de infrarrojos, como el ruido producido por el desgaste de ésta y las aberraciones geométricas inherentes a la óptica y a la falta de regularidad en el posicionamiento de la cámara, así como la enorme dificultad que implica mantener una iluminación homogénea en todas las partes de la obra, hacen que el mosaico final sea difícil de componer y que muchas veces no se obtengan los resultados esperados. VARIM proporciona herramientas para solventar los inconvenientes anteriores, además de otras ventajas añadidas, descritas más adelante. Existen otros proyectos que trabajan o han trabajado en temas relacionados con la reflectografía de infrarrojos. Algunos de los más destacados son: • Proyecto VASARI (Visual Arts Systems for Archiving and Retrieval of Images) [VASARI]. La National Gallery de Londres fundó este proyecto en 1989 con la idea de desarrollar un sistema de escaneado a color para obtener imágenes digitalizadas correspondientes a obras pictóricas. Además, el sistema implementado también es utilizado para obtener imágenes de infrarrojo utilizando una cámara de vídeo con tubo vidicón. El método desarrollado consiste en un escáner mecánico que se encarga de mover la cámara de adquisición para la cap- tura de las sub-imágenes que componen el mosaico. También han desarrollado aplicaciones de procesado de imágenes [VIPS] –librería que se emplea en el sistema VARIM– muy potentes para tratar y componer el mosaico completo. • Los investigadores Duillo Bertani y Luca Consolandi [Bertani, 2006] han desarrollado en el Centro di Riflettografia I.R. e Diagnostica dei Beni Culturali –Università degli Studi di Milano– un sistema de mosaico automático basado en un sistema de posicionado de alta precisión en el cual se mueve el sensor o cámara sobre la imagen que captura una lente de gran angular. No necesitan de un método de unión de imágenes ya que las muestras las adquieren sin solape y con tal precisión que simplemente se deben juntar una tras otra para formar el mosaico. • El Instituto Nacional de Óptica Aplicada [INOA] de Italia dispone de una unidad de Metrología Óptica donde se desarrolla una línea de investigación dedicada a la reflectografía de infrarrojos. No utilizan una cámara de adquisición para obtener la reflectografía, sino que obtienen imágenes de gran resolución mediante un escáner de infrarrojo. Su esquema consiste en un prototipo capaz de desplazarse en dos ejes perpendiculares entre sí a través de dos motores con una cabeza óptica que va adquiriendo la imagen de la obra. La gran ventaja de este sistema es que se evita el problema de la composición del mosaico. Sistema VARIM Con el objetivo principal de proporcionar una herramienta de composición totalmen- te automática del mosaico reflectográfico se diseñó e implementó el sistema VARIM [VARIM]. Por una parte, una de las especificaciones iniciales fue la de crear una arquitectura con una sola aplicación software que la controlase, capaz de obtener una imagen reflectográfica de alta resolución y calidad de la forma más eficaz posible. De este modo, se planteó automatizar el proceso de captación y el de composición del mosaico. Además se pretendía dotar a la aplicación de una serie de herramientas que corrigieran el ruido procedente de la cámara, la distorsión geométrica de ésta y las variaciones de iluminación durante la captación. Para llevar a cabo todo ello se diseñó una arquitectura modular como se presenta en la siguiente sección. Esquema de la arquitectura 91 En la Figura 2 se muestra el esquema de los elementos de los que consta el sistema. Éstos son principalmente: • Cámara de vídeo. Cámara de vídeo analógico sensible en la zona del infrarrojo cercano. • Tarjeta de adquisición2. Tarjeta encargada de digitalizar la señal de vídeo obtenida por la cámara. • Sistema de mecanizado3. Éste consiste en un cuadro de metal, de un metro cuadrado de superficie, que contiene dos ejes perpendiculares con un soporte donde se coloca la cámara. Los dos ejes se mueven mediante dos motores que permiten mover el soporte a lo largo de todo el cuadro. Estos motores están conectados al ordenador personal, mediante un conector RJ-45, que permite controlarlos desde la aplicación. A su vez, el cuadro puede ser empotrado en un sistema telescópico que La empresa Infaimon, S. L. (http:// www.infaimon.com) ha participado en este sistema prestando soporte técnico en la digitalización de la señal analógica de la cámara de infrarrojos. 3 Este sistema ha sido, bajo diseño del IPHE, fabricado por Servimatismos S. A. (http://www.servimatismos.com/). 2 Descripción del sistema VARIM: captación y composición automática del mosaico reflectográfico 92 Figura 2. Arquitectura física del sistema. Figura 3. Ventana de control del sistema de posicionado. permite elevarlo a una altura superior a los tres metros. • Estación de trabajo. Todos los elementos del sistema son controlados mediante un ordenador personal IBM-PC compatible a través de la aplicación VARIM. • Sistema de iluminación. implementados los algoritmos de composición del mosaico. • Módulo de control de los motores. Utilizando este módulo se tiene acceso al movimiento de los motores del sistema de mecanizado. Interfaz gráfica de usuario Para poder controlar todos los elementos descritos se diseñó una arquitectura software modular. El primer módulo que se puede observar es el correspondiente a la interfaz gráfica de usuario. Dicho módulo es la parte visible de la aplicación. Está compuesta por una serie de menús, diálogos y marcos que permiten utilizar y controlar todas las funcionalidades que presenta el programa mediante el uso del ratón y del teclado. A través de ésta se accede al resto de los módulos del sistema, entre los que destacan: • Módulo de adquisición de vídeo. El cual controla la tarjeta de adquisición de vídeo. • Módulo de imagen. Este módulo se subdivide a su vez en otros sub-módulos que modifican las imágenes para mejorarlas y donde, entre otras cosas, están Como se ha mencionado, este módulo da acceso a todas las funcionalidades del sistema a través de una ventana principal, desde la cual se pueden abrir otra serie de diálogos para realizar las distintas acciones disponibles. Dicha ventana principal se organiza en espacios de trabajo que contienen el listado de las imágenes con las que se trabaja. Desde esta ventana se tiene acceso a un menú contextual y a dos barras de herramientas que facilitan el uso de las distintas funciones. Uno de los diálogos accesibles mediante la ventana principal es el de control de los motores. Este diálogo permite manejar el sistema de posicionado de la cámara para realizar las adquisiciones de las sub-imágenes que formarán el mosaico. Es posible realizar desplazamientos manuales con una serie de botones de dirección, o bien realizar tomas automáticas de imágenes configurando las opciones adecuadas (fig. 3). Además, desde la ventana principal se puede abrir cualquiera de las imágenes que estén listadas en el espacio de trabajo actual; ya sea una de las sub-imágenes iniciales o cualquier sub-imagen resultado del proceso de composición de mosaico. Existe también una ventana de adquisición donde se visualiza el vídeo que está contemplando la cámara. Esta ventana permite realizar capturas de imágenes a disco o añadirlas directamente al espacio de trabajo. Además de las ventanas comentadas, la aplicación permite realizar desplazamientos de elementos del espacio de trabajo –la acción comúnmente llamada drag & drop– moviendo imágenes entre filas o filas enteras. También se dispone de una ventana de configuración de preferencias con las distintas opciones generales, de adquisición, mosaico, composición automática y de corrección, las cuales se guardan en un archivo de texto que permite recuperarlas posteriormente. Adquisición de sub-imágenes La adquisición de sub-imágenes se lleva a cabo a través del sistema de posicionado y del módulo de adquisición. El primero de ellos es el encargado de ir posicionando la cámara reflectográfica en los puntos deseados para poder capturar las distintas imágenes (fig. 2). Está formado por una cabecera de Ethernet y por un cuadro de posicionamiento de la cámara. Por otra parte, el módulo de adquisición permite adquirir imágenes de la cámara de vídeo a través del PC. De este modo, en la ventana de visualización aparece el vídeo capturado ofreciendo una serie de posibilidades de manejo y adquisición así como in- formación en tiempo real, como por ejemplo la visualización del histograma (fig. 4), y otras herramientas como modificación de la luminosidad de forma automática y manejo de controles de brillo y contraste. El modo automático de adquisición funciona de forma muy simple: se introduce en el sistema el número de tomas a realizar así como el solape deseado –en torno al 25 %– y éste se encarga de mover el sistema de posicionado automáticamente y de insertar las imágenes en el espacio de trabajo. Composición del mosaico A partir de las imágenes capturadas, la aplicación es capaz de realizar su unión para formar el mosaico completo. Para poder unir estas sub-imágenes es necesario seleccionar una pareja de puntos coincidentes, los cuales pueden ser marcados por el usuario (unión manual) (fig. 5) o calculados automáticamente por la aplicación (unión automática). Ambos métodos emplean funciones de la librería VIPS [VIPS] para realizar la unión propiamente dicha. Figura 4. Adquisición y visualización de la imagen. 93 Descripción del sistema VARIM: captación y composición automática del mosaico reflectográfico Figura 5. Selección de unión manual de imágenes. 94 Figura 6. Resultado de la unión manual. Se han implementado diferentes tipos de unión automática, dependiendo de las características de las imágenes. La función más utilizada es la de la unión crítica de dos puntos, que tiene en cuenta la existencia de zonas negras producidas por uniones anteriores. Para uniones de imágenes con pocos detalles y zonas homogéneas, se puede emplear la unión mixta, que utiliza un algoritmo basado en medidas de orden con aumento de intensidad [Posse, 2007], computacionalmente más costoso que el de correlación utilizado en la unión crítica, pero que da mejores resultados. El número de imágenes que componen un mosaico en muchas ocasiones es bastante elevado. Así, se puede tener, por ejemplo, un espacio de trabajo con 12 filas que tengan a su vez 10 imágenes cada fila. Si a esa cantidad se le añaden las sub-imágenes que se crean en el proceso de unión automática, se tiene un espacio de trabajo con muchas imágenes y se complica extremadamente localizar cada sub-imagen dentro del mosaico completo. Para cubrir esta necesidad se ha implementado una cuadrícula con el mismo número de filas que el espacio de trabajo y con el número de columnas igual al número de imágenes por fila con el que se está trabajando. Sobre esta rejilla se resalta con un color diferente la parte del mosaico a la que pertenece esta subimagen (fig. 7) lo que facilita localizar la zona de la imagen que se está manejando. Herramientas auxiliares Además de las funciones de adquisición y composición se han desarrollado tres herramientas auxiliares que ayudan en el proceso de composición: Figura 7. Situación de una sub-imagen en el mosaico completo. 1. Eliminación del patrón de ruido: Una gran variedad de cámaras de reflectografía de infrarrojos generan un patrón Figura 8. Evolución temporal del ­patrón de ruido. de ruido (Figura 8) debido al desgaste del tubo. VARIM presenta una herramienta para corregir en la medida de lo posible este patrón de ruido tratando las imágenes capturadas. 2. Corrección de la aberración geométrica: La distorsión geométrica asociada a una cámara de adquisición se debe a diferentes tipos de imperfecciones en el diseño y fabricación de las lentes que componen el bloque óptico. Así, hay que diseñar modelos que tengan en cuenta los errores de posición en el plano de la imagen. Existen dos tipos de distorsión geométrica: distorsión radial y tangencial. La primera es la más acusada y se debe a la curvatura de las lentes. El grado de distorsión dependerá en parte de la precisión con la que éstas han sido fabricadas. Otro de los efectos de distorsión que se ha incorporado en el método implementado es el debido a la desviación del punto principal de la cámara definido como la intersección del eje óptico con el plano del sensor. De este modo el sistema VARIM incluye una herramienta que, partiendo de una imagen patrón es capaz de caracterizar la distorsión geométrica de la cámara utilizada para posteriormente tratar y corregir las imágenes adquiridas. Para un nivel de estudio más detallado del método se puede consultar [Torres, 2004]. 3. Adecuación de la luminosidad: Para realizar la adquisición de una obra completa muchas veces no se dispone de una iluminación homogénea o es deseable modificar ésta –por ejemplo en zonas con dorados que producen imágenes saturadas-. Esta falta de homogeneidad produce efectos indeseables en el mosaico final, desvirtuando la imagen resultante. Por ello, VARIM contiene un algoritmo capaz de controlar de forma automática los niveles de iluminación 95 Descripción del sistema VARIM: captación y composición automática del mosaico reflectográfico 96 deseables variando parámetros internos de la tarjeta de adquisición de vídeo utilizada. Como resultado se obtienen mosaicos con una distribución homogénea de la luminosidad. Para más información se puede consultar [Torres, 2005]. Conclusiones y trabajo futuro El sistema VARIM se ha convertido en una ayuda y mejora inestimable con respecto al método tradicional. Así, por ejemplo, con el método tradicional, el usuario utilizaba dos aplicaciones distintas para realizar las tareas de adquisición de imágenes y composición del mosaico, respectivamente. Esto implicaba manejar dos o tres entornos de trabajo distintos: guardar todas las imágenes adquiridas por una parte, aplicarles ligeros retoques con una aplicación de tratamiento de imágenes y, posteriormente, utilizar otro entorno para insertar éstas y realizar la composición. VARIM se presenta como una aplicación que integra estas tareas en un solo entorno de trabajo, lo cual agiliza el proceso completo. De este modo, resulta especialmente útil el uso de espacios de trabajo y la posibilidad de almacenar la información concerniente a éstos de forma rápida y sencilla dado que en cada sesión se manejan una gran cantidad de imágenes. En la práctica, se suelen adquirir varias imágenes de la misma zona del cuadro con condiciones distintas. Además, se produce un gran número de uniones parciales, muchas de las cuales pueden necesitarse en un futuro. El hecho de guardar todos estos resultados con apenas un clic de ratón y de recuperarlos abriendo el fichero asociado resulta de gran comodidad para el usuario. Otra de las funcionalidades que se han encontrado más útiles en la práctica ha sido el uso de directorios de trabajo y temporales. Mediante las preferencias del sistema, el usuario puede establecer un directorio de trabajo y otro donde se almacenen los resultados parciales a modo de ficheros temporales asociados. Además, en un entorno real, la aplicación ofrece una herramienta de trabajo que hace que la labor de adquisición y composición del mosaico se convierta en una tarea cómoda y sencilla, a la vez que produce un ahorro de tiempo más que considerable utilizando los métodos automáticos descritos en este artículo. Utilizando la adquisición y composición automática se han logrado obtener mosaicos de hasta 400 imágenes. A la vista de los resultados obtenidos y el desarrollo realizado, se plantean nuevas líneas de actuación que complementen y mejoren las funcionalidades ofrecidas por la aplicación. De este modo, se pueden destacar las siguientes tareas que, o bien ya se han comenzado, o se plantean como trabajo futuro: • En relación con el módulo de adquisición se plantean nuevas ampliaciones: –Aumentar la resolución de digitalización de las imágenes capturadas de 8 a 12 bits por píxel. –Mejorar del sistema de adecuación de la luminosidad con transformaciones no lineales. • Resulta de gran interés estudiar e implementar nuevos algoritmos que aumenten la eficiencia y bajen el tiempo de proceso del algoritmo de adquisición automática de imágenes dado que éste es, en estos momentos, relativamente lento. • Del mismo modo se están desarrollando nuevos y más eficientes algoritmos de unión automática que sean más rápidos y que mejoren los resultados con zonas de solape muy homogéneas. • Ampliación de la Interfaz Gráfica de Usuario. Este es el aspecto más visual de la aplicación y el que mayor interacción presenta con el usuario. Mejoras en este módulo repercuten en la facilidad de uso y funcionalidad de la aplicación. Entre otras tareas se implementarán nuevas funciones que permitan seleccionar de forma sencilla zonas concretas de una imagen, guardar el espacio de trabajo de forma automática así como añadir algunas funciones de edición tales como deshacer cambios. • A pesar de que se ha conseguido una gestión de memoria eficiente que permite manejar imágenes de gran tamaño y dado que ésta es una tarea crítica en la aplicación, se están estudiando nuevos métodos de gestión de memoria aún más eficientes. Por último, se plantea la extensión de la aplicación a otras plataformas de trabajo distintas de Windows, como pueden ser sistemas GNU/Linux. VARIM dispone de una página web propia (http://www.gatv.ssr.upm.es/wikivarim), donde se puede obtener el software de modo gratuito, así como descargar un completo manual de usuario y más información sobre la aplicación. Bibliografía Bertani, D.; Consolandi, L.: «High Resolution Imaging in the Near Infrared», Digital Heritage. Lindsay MacDonald, 211-38. Oxford, 2006. Istituto Nazionale di Ottica Applicata (INOA): http://www.ino.it/ Posse, A.; Torres, J.: «Unión de imágenes reflectográficas basada en medidas de orden con aumento de intensidad y en selección de puntos por estructura», XXII Simposium Nacional de la Unión Científica Internacional de Radio (URSI), Tenerife, 2007. Torres, J.; Menéndez, J. M.: «A practical algorithm to correct geometrical distortion of image acquisition cameras», IEEE International Conference on Image Processing, vol III, pp. 2451-2454, Octubre, 2004. Torres, J.; Menéndez, J. M.: «An adaptive real-time method for controlling the luminosity in digital video acquisition», IAESTED International Conference on Visualization, Imaging and Image Processing, pp. 133-137, Septiembre, 2005. Van Asperen de Boer, J. R.: A contribution to the examination of earlier European paintings. Tesis Doctoral, Universidad de Amsterdam, 1970. Web del Proyecto VARIM: http://www.gatv.ssr. upm.es/wikivarim Visual Arts System for Archiving and Retrieval of Images (VASARI): http://www.ecs.soton. ac.uk/~km/projs/vasari/ Librería VIPS. Cupitt, J.; Martínez, K.; Padfield, J., 2004: http://www.vips.ecs.soton.ac.uk/ 97