- Ninguna Categoria
Experiencia 2 - ramos on
Anuncio
1
Experiencia 2:
Modulación y Demodulación de Frecuencia
Laboratorio de Comunicaciones - ELO241. Primer Semestre 2011
Departamento de Electrónica, Universidad Técnica Federico Santa Marı́a
I. I NTRODUCCI ÓN
El objetivo de esta experiencia es aplicar y verificar los
conceptos de modulación de frecuencia (FM), ası́ como de
demodulación de señales moduladas en frecuencia mediante
phase-locked loops (PLLs). Para tal efecto deberá implementar
un diseño simple utilizando componentes semiconductores
integrados.
El resto de este documento continúa con un resumen teórico
de la modulación FM ası́ como del funcionamiento de los
PLLs. Luego se incluye una descripción de los componentes
y circuitos a utilizar. Finalmente se entrega la guı́a especı́fica
para confeccionar el preinforme, realizar la experiencia y
escribir el informe final.
II. R ESUMEN DE LA T EOR ÍA
II-A. Modulación FM
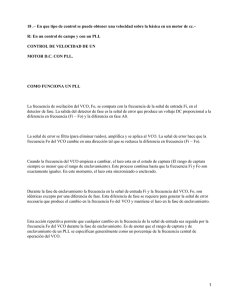
II-A1. Expresiones Generales: La expresión para una portadora sinusoidal de frecuencia ωc [rad/s] y amplitud Ac
modulada en frecuencia por una señal modulante m(t) es de
la forma
Z t
(1)
sFM (t) = Ac cos ωc t + Kf
m(x)dx ,
0
donde Kf 6= 0 es la constante de desviación de frecuencia en
[rad/(s·V)]. La frecuencia instantánea en el instante t, ωi (t),
corresponde a la derivada temporal del argumento del coseno
en (1), es decir,
ωi (t) = ωc + Kf m(t)
[rad/s]
(2)
es la constante de desviación de frecuencia en [Hz/V]. Con
ésto, la máxima desviación en frecuencia de la señal portadora,
denotada por ∆f , es
∆f = máx fi (t) = fD Am
t
se obtiene, sustituyendo en (1) y en (2),
Kf Am
sFM (t) = Ac cos ωc t +
sin(ωm t)
ωm
ωi (t) = ωc + Kf Am cos(ωm t),
(3)
(4)
(5)
respectivamente. Denotando las frecuencias portadora en instantánea en Hz como fc = ωc /(2π) y fi (t) = ωi (t)/(2π),
respectivamente, tenemos que
Kf
Am = fc + fD Am cos(ωm t) [Hz], (6)
fi (t) = fc +
2π
donde
Kf
[Hz/V]
fD ,
(7)
2π
(8)
Tomando el cociente entre esta desviación y la frecuencia de
la señal modulante, fm = ωm /(2π), definimos el ı́ndice de
modulación de una señal modulada en frecuencia como
∆f
Kf
β,
=
Am .
(9)
fm
ωm
Reemplazando esta expresión en (4) obtenemos
sFM (t) = Ac cos (ωc t + β sin(ωm t))
(10)
II-A2. Ancho de Banda:
II-A2a. FM Banda Angosta: Los sistemas FM operando
con β π/2 se denominan sistemas FM de banda angosta
(NBFM). Tı́picamente se considera NBFM un sistema con
β ≤ 0,5.
En este régimen de operación, resulta aceptable aproximar
la expresión para la señal modulada, sNBFM (t) en (10) como
sNBFM (t) ' Ac [cos(ωc t) − β sin(ωc t) sin(ωm t)]
(11)
Esta expresión es similar a la obtenida al utilizar modulación AM, salvo que ahora las bandas laterales (asociadas a
sin(ωc t) están en cuadratura con la portadora cos(ωc t), cuya
amplitud permanece constante. El ancho de banda para NBFM,
BWNBFM es aproximadamente igual al obtenido con AM-DSB,
es decir,
Para una modulante sinusoidal (tono puro) a frecuencia
ωm [rad/s]
m(t) = Am cos (ωm t) ,
[Hz]
BWNBFM ' 2fm
(12)
II-A2b. FM Banda Ancha: Cuando β π/2, la
modulación se denomina FM de banda ancha (WBFM o,
simplemente, FM). En este caso, (4) puede escribirse como
sFM (t) = Ac J0 (β) cos(ωc t)
∞
X
+Ac
(−1)n Jn (β) cos([ωc − nωm ]t) − cos([ωc + nωm ]t) ,
n=1
(13)
donde cada coeficiente Jn (β) corresponde a la función de
Bessel del primer tipo de orden n evaluada en β (recuerde
que β es el ı́ndice de modulación, ver (9)).
Podemos deducir a partir de (13) que sFM (t) está compuesta
por una portadora de amplitud J0 (β) y un número infinito
de bandas laterales espaciadas uniformemente a ωm rad/s, a
“ambos lados” de la portadora.
2
Se define como ancho de banda de transmisión, BWFM ,
el rango de frecuencias que contiene al menos el 98 % de la
potencia de la señal de FM. Una expresión aproximada para
este ancho de banda puede obtenerse usando la llamada “regla
de Carson”
BWFM ' 2(β + 1)fm = 2(∆f + fm )
vb (t)
II-B. Demodulación de FM Mediante PLL
II-B1. Introducción:
El PLL (phase locked loop) es un circuito electrónico de
amplia aplicación en sistemas de comunicaciones. Su función
es identificar la frecuencia principal de una señal de entrada,
generar un voltaje de salida proporcionala ésta y, al mismo
tiempo, generar una señal que oscila a la frecuencia principal
de la señal de entrada. En su forma analógica, consiste en un
sistema de lazo cerrado que genera un voltaje proporcional al
error de fase, ve , entre la señal de entrada (vi ) y la salida de
un VCO local (vb (t)), aplicando este voltaje al VCO con el
objetivo de control de llevar el error de frecuencia a cero (ver
Fig. 1).
Entre las aplicaciones más conocidas de los PLL en comunicaciones se puede mencionar las siguientes:
Recuperación de portadora en AM y demodulación de
FM.
Sincronización de frecuencia.
Multiplicación y división de frecuencia
Restauración o acondicionamiento de señales
Por su gran versatilidad, es común encontrar al PLL formando parte de sistemas tales como:
Detector
de Fase
vp (t)
ve (t)
Filtro
Pasa Bajos
VCO
(14)
II-A3. Métodos de generación de FM: Los métodos de
generación de FM se pueden agrupar esencialmente en dos
tipos: FM directa y FM indirecta.
II-A3a. FM Indirecta: Consiste en integrar primeramente la señal de información para luego modular en fase,
obteniendo ası́ FM banda angosta. Utilizando multiplicadores
de frecuencia se puede lograr FM banda ancha. Un ejemplo
de esta forma de generación de FM, lo constituye el conocido
sistema Armstrong.
II-A3b. FM Directa: En este caso la frecuencia de la
señal portadora es modulada directamente por la señal de
información.
La forma común de obtener FM directa consiste en variar,
conforme a la señal de información, algún parámetro de un
circuito sintonizado realizado con componentes reactivos (L o
C) Estas técnicas son comúnmente empleadas en aplicaciones
de FM banda ancha.
En esta experiencia, se generará señal FM en forma directa,
utilizando para ello un oscilador controlado por voltaje (VCO)
disponible en el circuito integrado XR-2209.
MODEMs
Decodificadores de tono.
Receptores de FM, SCA.
Sincronizador de datos
vi (t)
Amplificador
vu (t)
Figura 1: Diagrama de bloques simplificado de un PLL.
II-B2. Detector de Fase: El detector de fase de un PLL
normalmente opera amplificando y saturando cada una de las
señales a comprarar, mediante un circuito como el mostrado
en la figura 2. Las señales vi (t) y vb (t) saturadas, denotadas
por v̌i (t) y v̌b (t), respectivamente, pueden expresarse como
v̌i (t) , sgn(vi (t))L
(15)
v̌b (t) , sgn(vb (t))L,
(16)
donde la función “signo” sgn(·) retorna un 1, 0 ó −1 si su
argumento es positivo, cero o negativo, respectivamente, y
donde L [V] es la tensión de saturación.
v(t)
R
v̌(t)
Figura 2: Circuito saturador de señal al interior del detector
de fase.
La salida del detector de fase, denominada vp (t), se obtiene
como el producto de entre v̌i (t) y v̌b (t), es decir
vp , v̌i (t)v̌b (t).
(17)
Dado que v̌i (t) y v̌b (t) son (prácticamente) ondas cuadradas,
este producto puede implementarse de manera simple utilizando circuitos que operen binariamente (de manera semejante a
una compuerta XOR).
La figura 3 ilustra la generación de la señal vp (t) para dos
señales v̌i (t) y v̌b (t) de periodo T y desfase equivalente a
τ [s]. La relación entre la difrencia de fase en radianes y τ es
τ
φi − φb = 2π
[rad].
(18)
T
En la figura, τ = T /8, lo que representa una diferencia de
fase de π/4.
En la figura 3 se puede apreciar cómo el valor medio de
vp (t), que denominaremos vp (t),1 queda determinado por el
retardo τ y por ende por el valor de ∆φ , para valores de τ
entre 0 y T /2, es decir, para φi − φb ∈ [0, π]:
T /2 − τ
τ
vp = L
−
T /2
T /2
4τ
, ∀τ ∈ [0, T /2].
=L 1−
T
1 Más precisamente, v (t) corresponde a la señal que se obtiene al remop
ver de vp (t) todas sus componentes espectrales de frecuencia mayor que
2/T [Hz]. Por esta razón escribimos vp (t) como una señal que puede variar
en el tiempo.
3
T
τ
+L
v̌i (t)
t
-L
+L
v̌o (t)
t
-L
T
2
τ
+L
vp (t) = v̌i (t)v̌o (t)
-L
−τ
t
Figura 3: Señales de comparación saturadas v̌i (t), v̌o (t) y
resultado de su multiplicación, vp (t). La diferencia de fase
φi − φb = (τ /T ) ∗ 2π [rad] determina el valor medio de vp (t),
que viene dado por L(1 − 4τ /T ) para φi − φb ∈ [0, π].
II-B3. Análisis del PLL Como un Lazo de Control: En el
análisis sucesivo, consideraremos, sin pérdida de generalidad,
que el PLL se encuentra enganchado en el rango φi − φb ∈
[0, π]. En dicho rango, el valor medio de vp es igual a cero
cuando φi − φb = π/2, es decir, en la mitad del intervalo
de enganche. Esta situación, en la que vi (t) y vb (t) están en
cuadratura, es la condición de enganche ideal del PLL. Resulta
entones conveniente definir el error de fase respecto de este
punto de operación como
∆φ (t) , φi (t) − φb (t) − π/2 = ψi (t) − φo (t),
donde
ψi (t) , φi (t) − π/2
[rad]
La relación entre vp y φi − φb para valores de φi − φb dentro
y fuera del rango [0, π] se muestra en la figura 4. En la figura
se observa que vp es una función periódica del error de fase
φi − φb .
(23)
donde
2L
[V/rad]
(24)
π
es la ganancia del detector de fase. Sustituyendo en (20)
obtenemos
Kd ,
ve (t) = −Kd (∆φ ∗ g)(t)
(25)
vu (t) = −Ave (t),
(26)
donde −A es la ganancia del amplificador.
Por otro lado, la frecuencia instantánea a la salida del VCO
está dada por
vp
L
−π
(22)
es la fase de entrada retardada π/2 radianes. Sustituyendo
en (19) obtenemos
vp (t) = −Kd ∆φ (t),
Equivalentemente,
2(φi (t) − φb (t))
vp (t) = L 1 −
, ∀[φi (t) − φb (t)] ∈ [0, π].
π
(19)
(21)
π
ωb (t) = ω0 + K0 vu (t),
2π
0
φi − φb
Figura 4: Rrelación entre ve y φi − φo en un detector de fase.
Sea g(t) la respuesta a impulso del filtro pasa bajos. Si
su respuesta en frecuencia rechaza las componentes de doble
frecuencia y superiores, entonces la tensión de error de fase
viene dada por
ve (t) = (vp ∗ g)(t) = (vp ∗ g)(t),
donde
K0
−L
(20)
donde ∗ denota convolución. Por lo tanto, ve (t) “seguirá” al
valor medio de vp (t).
Suponiendo que la ganancia del amplificador de la figura 1
es negativa y que la frecuencia del VCO aumenta al aumentar
vu (t), el PLL, al “engancharse”, logrará una diferencia de
fase φi (t) − φb (t) que se mantiene acotada y dentro de algún
intervalo en que vp decrece linealmente con φi − φb . Dentro
de cualquiera de estos intervalos, si fi (t) aumenta, el aumento
de ∆φ reducirá la tensión de error ve (t), ocasionando un
aumento en la frecuencia a la salida del VCO, lo que hace
que φi (t) − φb (t) disminuya. Es esta acción correctiva lo que
permite que el PLL no sólo pueda engancharse a la frecuencia
de vi (t), sino que también seguir las variaciones de frecuencia
de vi (t).
(27)
[rad/(s·V)]
es la sensibilidad del VCO y ω0 es la frecuencia de oscilación
libre del VCO.
Para expresar φb en términos de vu , supóngase que vb (t) =
Vb cos(ω0 t + φb (t)). La frecuencia instantánea de vb (t), en
[rad/s], corresponde a la rapidez de cambio del argumento del
coseno en la expresión anterior, es decir,
dφb (t)
rad/s.
dt
Igualmene, para la señal de referencia,
ωb (t) = ω0 +
ωi (t) = ω0 +
Por lo tanto,
Z
dψi (t)
dt
rad/s.
(28a)
(28b)
t
φb (t) =
(ωb (x) − ω0 (x))dx,
(29)
(ωi (x) − ω0 (x))dx,
(30)
0
Z
ψi (t) =
t
0
donde se ha supuesto, por simplicidad, que φb (0) = ψi (0) =
0. Combinando con (27), tenemos que
Z t
φb (t) = K0
vu (t)dx.
(31)
0
4
Aplicando transformada de Laplace a las ecuaciones anteriores
y combinando se obtiene
1
(32)
Φb (s) = AK0 Kd G(s)(Ψi (s) − Φb (s))
s
donde las mayúsculas representan las transformadas de Laplace de las funciones respectivas.
La ecuación anterior revela que la relación entre las fases
de entrada y las tensiones al interior del loop del PLL
puede representarse mediante el diagrama de bloques de la
figura 5. Con el reemplazo Φb (s) = Ψi (s) − ∆Φ (s) en (32) y
Ψi (s)
Φb (s)
+
∆Φ (s) −K
d
G(s)
Ve (s)
−Ka
Filtro
Amplificador
Pasa Bajos
Detector
de Fase
1
s
K0
Vu (s)
VCO
Figura 5: PLL visto como un sistema de control integrativo
en lazo cerrado, con la frecuencia instantánea de la señal de
entrada, ωi (t) [rad/s], como referencia.
despejando ∆Φ (s) obtenemos
que para mantener el PLL enganchado es necesario que
|∆φ | < π/2.)
Siendo el error de fase estacionario un valor constante, se
deduce de (28) que ωb (t → ∞) = ωi (t), es decir, si el PLL
se engancha, lo hace con error de frecuencia igual a cero.
A partir de (36), la tensión a la salida del filtro pasa-bajos
en estado estacionario es
Kd
ve (t → ∞) =
[ωi2 − ω0 ].
(37)
Kv
Ésto revela cómo el PLL puede ser utilizado para demodular señales de frecuencia modulada: la salida del
filtro pasa-bajos presenta una tensión proporcional a la
desviación de frecuencia de vi (t) respecto de v0 . El PLL es
además insensible a las variaciones de amplitud de la señal,
lo que lo que vuelve a la modulación y demodulación de FM
una técnica eficaz para reducir el ruido de amplitud.
II-B4. Respuesta Transiente del PLL: Denotando la desviación de frecuencia de la señal de entrada con respecto a ω0
como
∆ωi (t) , ωi (t) − ω0
y su transformada de Laplace como ∆Ωi (s) = sΨi (s),
obtenemos de (33) que
Ve (s) =
Ψi (s)
sΨi (s)
∆Φ (s) =
=
Kv
s + Kv G(s)
1 + s G(s)
(33)
Kv , K0 AKd
(34)
donde
es la ganancia total del lazo (para correinte continua). A partir
de (33) es posible analizar el comportamiento estacionario
del error de fase frente a distintas variaciones en la señal de
referencia vi (t).
Escalón de Fase: En este caso, la fase de entrada salta
de un valor inicial ψi1 a un valor final ψi2 en t = 0. Tenemos
que Ψi (s) = ψi2 /s. Luego, aplicando el Teorema del Valor
Final a (33), se encuentra que el valor estacionario de ∆φ (t)
es en este caso
∆φ (t → ∞) = lı́m s∆Φ (s) = 0
s→0
(35)
En vista de (28), concluimos que para ωi (t) = ω0 , con ψi (t)
siendo cualquier valor constante, el error de fase ∆φ (t) en
estado estacionario es cero y el PLL termina enganchado con
ωb (t → ∞) = ω0 y φb (t → ∞) = φi (t) − π/2.
Escalón de Frecuencia: En este caso, la frecuencia de
referencia salta en t = 0 desde un valor ωi1 hasta ωi2 . Por
lo tanto, a partir de (29), Ψi (s) = [ωi2 − ω0 ]/s2 . Aplicando
el Teorema del Valor Final a (33), se encuentra que el valor
estacionario de ∆φ (t) es en este caso
ωi2 − ω0
∆φ (t → ∞) = lı́m s∆Φ (s) =
,
(36)
s→0
Kv
donde hemos asumido que G(0) = 1, es decir, que el filtro
pasa-bajos tiene ganancia unitaria a frecuencia cero.
Se deduce de (36) que el error de fase en estado estacionario
puede reducirse aumentando la ganancia del lazo. (Recuerde
(38)
G(s)
∆Ωi (s)
s + Kv G(s)
(39)
Se deduce entonces que la respuesta transiente de ve a variaciones en la desviación de frecuencia de vi queda determinada
por la ganancia del lazo y, principalmente, por la funsción de
transferencia del filto pasa bajos. Estudiaremos a continuación
la respuesta transiente de ve cuando este filtro es ideal y
cuando se trata de un filtro pasa bajos de primer orden.
Filtro Ideal: En este caso, el filtro pasabajos se comporta
como una ganancia unitaria para toda frecuencia de interés.
Dentro de este rango, podemos aproximar G(s) = 1. Note, sin
embargo, que debe existir suficiente rechazo de la componente
de doble frecuencia a la salida del detector de fase (de lo
contrario, ve (t) tendrı́a un ripple de alta frecuencia que forzarı́a
al VCO a seguir las oscilaciones de vp (t)). Con la sustitución
G(s) = 1, (39) toma la forma
1
∆Ωi (s),
(40)
s + Kv
es decir, un sistema de primer orden.
En la práctica, al implementación del filtro pasa bajos
dará lugar a un G(s) que necesariamente variará con la
frecuencia. El caso más simple corresponde un filtro pasa bajos
de primer orden
Filtro de Primer Orden: Este filtro puede implementarse
facilmente como un filtro RC. En este caso,
1
, con τ1 = R1 C.
G(s) =
(41)
1 + sτ1
Sustituyendo en (39) obtenemos
Ve (s) =
Ve (s) =
1/τ1
∆Ωi (s)
s2 + s/τ1 + Kv /τ1
|
{z
}
H(s)
(42)
5
s2 + 2ξωn s + ωn2 ,
(43)
ωo + ω`
ωb rad/s
en donde la función de transferencia H(s) corresponde a un
sistema de segundo orden. El denominador de H(s) tiene la
forma
ωo − ωκ
ωo
ωi rad/s
donde
r
r
Kv
Kv
ωn =
=
τ
R1 C
r1
1
1
ξ=
2 R1 CKv
(44a)
(44b)
son la frecuencia natural y el coeficiente de amortiguamiento
del sistema, respectivamente.
NOTE que ωn ese la frecuencia natural del lazo cerrado
de la figura 5, donde las señales de entrada son fases y las
salidas son fases, tensiones de error y frecuencias. En particular, ωn no corresponde a, ni se relaciona directamente
con, la frecuencia de oscilación libre del VCO, ω0 .
El valor de ωn determina el ancho de banda del lazo cerrado
y, por ende, de su capacidad de responder rápidamente a
variaciones en la frecuencia de vi (t). Por su parte, ξ determina
la estabilidad del lazo cerrado y, en particular, el overshoot de
la respuesta a escalón del sistema.
Note de (44) que con este filtro (tipo RC) no es posible
escojer ωn y ξ de manera independiente.
II-B5. Rangos de Enganche y de Captura:
Rango de Enganche: Es la medida de la máxima desviación de frecuencia respecto a ω0 para la cual el PLL, una vez
enclavado, permanece enganchado frente a variaciones lentas
de la frecuencia de entrada.
El rango de enganche, ω` [rad/s], es tal que, para ωi =
ω0 + ω` , el valor del error de fase ∆φ en estado estacionario
es igual π/2 (para ωi = ω0 −ω` el error estacionario es −π/2).
A partir de (36), se desprende que el rango de enganche viene
dado por
π
ω` = Kv [rad/s]
(45)
2
En [Hz], el rango de enganche es
Kv
[Hz]
(46)
4
Como se puede apreciar, el rango de enganche depende sólo
de la ganancia total del lazo a frecuencia cero.
f` =
Rango de Captura: Es la máxima desviación de frecuencia, ωκ , respecto de ω0 desde la cual el PLL, inicialmente
desenganchado, es capaz de adquirir enganche. Su determinación en forma analı́tica es compleja, pusto que corresponde
al comportamiento del PLL fuera de su régimen de operación
lineal. En general, el rango de captura es algo menor que el
rango de enganche, como se aprecia en la figura 6.
III.
I MPLEMENTACI ÓN
III-A. VCO XR-2209
El esquema básico de un VCO utilizando el circuito integrado XR-2209 se muestra en la figura 7.
ωb rad/s
ωo
ωi rad/s
ωo
ωo
ωo − ω`
ω o + ωκ
Figura 6: Frecuencia de salida (ωb ) versus frecuencia de
entrada (ωi ) de un PLL para barrido de frecuencia ascendente
y descendente.
Consideraciones de diseño:
El condensador CB desacopla continua. Por lo tanto,
1/(ωm CB ) RB (ya que VT 4 puede considerarse
constante e independiente de IT ).
Si no se inyecta señal o si m(t) es sólo tensión continua,
entonces la frecuencia de oscilación es 1/(2πRC). Esta
es la frecuencia de oscilación libre del VCO.
En la experiencia de laboratorios no se utilizará el filtro
pasa bajos. Esto permitirá observar las armónicas a la
salida del VCO en el analizador de espectros.
La tensión de alimentación del VCO debe estar entre
8V y 26V . Se recomienda utilizar 12V .
El mezclador es una componente MINI-CIRCUITS (el
mismo de la experiencia Nro. 1), que operará como
modulador balanceado. CUIDADO! ESTE ELEMENTO ES DELICADO Y EL APLICARLE SEÑALES
EXCESIVAS LO DESTRUIRÁ. NO EXCEDER LOS
NIVELES ESPECIFICADOS POR EL FABRICANTE. APLICAR 7[dBm] CON UN GENERADOR DE
RF EN EL PUERTO “LO”. NO APLICAR NIVEL
CONTINUO
Al interconectar elementos debe tenerse en cuenta los
posibles problemas de adaptación de impedancias. El
mezclador, por ejemplo, representa una impedancia de
carga y de salida para los elementos que se conecten a
él de 50Ω. Se debe bloquear la componente continua
a la entrada del mezclador mediante un condensador
(no electrolı́tico).
Diseñar el circuito del VCO de acuerdo a las siguientes
especificaciones:
a) Especificaciones para oparación individual (VCO solo):
fc = 200 [KHz]
∆f = 25 [KHz]
(47)
(48)
6
VCC
C
1µF
1
2
C1
VCC
fi (t) =
3
C2
SWO
TWO
XR-2209
BIAS
CB
T4
IT 4
RB
m0 (t)
m(t)
VEE
6
1
RC
h
1+
R
RB (1
−
i
m0 (t)
VBIAS +0,7 )
7
8
Frecuencia: fi (t) rad/s
5
1µF
5.1K
3.9K
Filtro
Pasabajos
RF
LO
VCC
f. corte ≥ fc + ∆f
Generador
de VHF
VT 4 = VBIAS + 0,7
R
IF
Mixer
IT no debe exceder 6mA
IT ≥ 0
Figura 7: Configuración del VCO utilizando el citcuito integrado XR-2209.
!
"# $
! "# " !
%
Para esta experiencia no se usará la resistencia R (junto al
condensador C del pin 7).
La frecuencia de oscilación libre del VCO, f0 , queda
determinada por los componentes externos (R0 ,C0 ) de acuerdo
a
f0 =
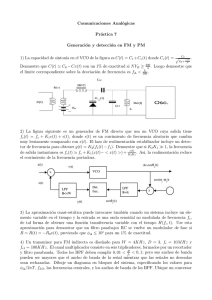
Figura 8: Diagrama interno del LM/NE 565.
b) Especificaciones para oparación conjunta (VCO conectado al PLL):
fc = 40 [KHz]
(49)
∆f = 25 [KHz]
(50)
La frecuencia instantánea del VCO está dada por
1
R
m0 (t)
fi (t) =
1+
(1 −
) ,
RC
RB
VBIAS + 0,7
(51)
(ver figura 7). Cuando la señal m(t) es cero (o los terminales
de entrada están abiertos), se cumple que m0 (t) = VBIAS +0,7.
Luego, la frecuencia de oscilación libre del VCO es
1
[Hz],
(52)
2πRC
de donde se puede despejar el valor del producto RC para
cada especificación de fc (esp. a) ó b)). Al escojer R y la
amplitud de m(t) debe asegurarse de que la corriente IT
no supere los 6mA.
fc =
III-B. PLL LM565/NE565
La configuración interna del LM/NE 565 se muestra en
la figura 8. Según se puede observar, el LM 565 tiene una
conexión interna de tipo resistiva (Rin ) que junto con alguna
configuración externa, elegida por el diseñador, constituirá el
filtro pasabajos del lazo. Para este PLL, Rin = 3,6 [Kohm].
1
3,7 × R0 C0
[Hz]
(53)
Importante: R0 debe estar en el rango de 2[k] a 20[k].
Las caracterı́sticas eléctricas más importantes de este circuito integrado se muestran en el cuadro I.
Se propone la configuración mostrada en la figura 9 para el
ensayo de su comportamiento. Se utilizará sólo la versión de
“filtro simple” (solo condensador “C” en pin 7).
Para el PLL LM 565 se debe diseñar de acuerdo a las
siguientes especificaciones:
Voltaje de alimentación Vcc = 6[V].:
PLL con filtro simple
• frecuencia central: f0 = 40 [kHz]
• rango de enganche f` : calcular de acuerdo a las
especificaciones del circuito integrado.
• coeficiente de amortiguamiento: = 0.25
• calcule el rango de captura y la frecuencia natural
del lazo.
PLL con filtro pasa-bajos simple: Para este caso se pide
diseñar un circuito PLL con configuración de filtro simple para
una frecuencia central de f0 y coeficiente de amortiguamiento
igual a ξ con lo que se procede a determinar los siguientes
parámetros del circuito. Para calcular los componentes R y C
y lograr la frecuencia de oscilación libre del VCO se recurre
a la formula dada por el fabricante (53):
f0 =
0,3
1
'
.
3,7 × R0 Co
R0 C0
Reemplazando la frecuencia de oscilación libre del VCO del
PLL, llegamos a la relación para Ro y Co :
R0 C0 = 0,000008 [s].
7
Valores Máximos
Vcc :Alimentación
Pd :Disipación de potencia
V2−3 :entrada diferencial
Vd :voltaje de control del VCO
12 [V]
300 [mW]
1 [V]
0.75Vcc < Vd<Vcc
Caracterı́sticas de operación para Vcc = 6 [V]
Vz: nivel de entrada para limitación
10 [mV]
fo(max) :frecuencia máxima del VCO
500 [KHz]
Zi: impedancia de entrada del PhD (pin 2-3)
5 [Kohm]
Zo: impedancia de salida del amplificador (pin 7)
3,6 [Kohm]
(*) KD :sensibilidad del detector de fase
0,68 [V/rad]
K0 : sensibilidad del VCO
4,1×fo [rad/s/V]
(**) K0 KD : ganancia de lazo
2,8 fo [1/s]
La ganancia del lazo decrece al aumentar el voltaje de alimentación Vcc a través de la relación K0 KD = 33,6fo /(2Vcc ).
(*) La sensibilidad del detector de fase incluye la ganancia del amplificador (KD = Kd ∆A).
(**) La ganancia de lazo puede ser reducida conectando una resistencia entre el pin 6 y pin 7; ésta reduce la impedancia
de carga a la salida del amplificador y por lo tanto la ganancia del lazo.
Cuadro I: Rangos de operación del PLL LM/NE 565
µ !
!
Figura 9: Conexión sugerida del circuito integrado LM/NE565.
Se sabe que R0 debe estar en el rango de 2[Kohm] a
20[Kohm]. Se puede elegir por ejemplo: R0 = 10[kΩ], lo
que implica C0 = 0,8 [nF] ó C0 = 1[nF] y R0 = 8[kΩ].
Ahora, para calcular el rango de enganche se usa la siguiente
relación dada por el proveedor del circuito integrado:
f` =
8f0
,
VC
(54)
en donde VC = 2Vcc = 12[V]. Reemplazando los datos
se llega a una frecuencia de enganche: f` = 26666,7[Hz].
Con ésto se calcula el rango de enganche, determinado por:
2f` ' 53[kHz] Luego, se debe lograr un coeficiente de
amortiguamiento ξ = 0,25. Se recurre a la relación:
r
1
1
ξ=
(55)
2 R1 CK0 KD
Evaluando para K0 = 4,1 ∗ f0 = 164000 y KD = 0,68 se
llega a la siguinte expresión, que en este caso relaciona a R1
y C1 :
R1 C1 = 0,000036[s].
Ası́, como R1 es la impedancia de salida del pin 7, que es de
3.6 [KΩ], se obtiene para C1 : C1 = 10[nF].
Ahora, con los parámetros determinados hasta el momento
se puede calcular la frecuencia natural del lazo, fn , a partir
de la ecuación siguiente:
r
K0 KD
1
.
fn =
2π
R1 C
Reemplazando se obtiene fn = 8877[Hz].
Cabe destacar que esta no es la frecuencia de corte del lazo,
sino que nos indica en donde se encontrará la frecuencia del
peak de resonancia del lazo. La frecuencia de corte del lazo
estará a una frecuencia superior a la frecuencia natural del
lazo.
Finalmente, se calcula el rango de captura, que para estos
datos resulta ser: fκ ' 25[kHz].
8
III-C. Configuración a Utilizar en la Experiencia de Laboratorio
En el laboratorio se evaluará el comportamiento del PLL
integrado LM 565 utilizando para ello un módulo de prueba,
cuyo diagrama de bloques, junto al PLL, se muestra en la
figura 10.
El VCO permitirá también generar señales de FM que el
PLL podrá demodular. Los bloques “Circuito PLL” y “Circuito
VCO Externo” corresponden a las configuraciones sugeridas
por el fabricante y deben polarizarse como se especifica
para cada uno de ellos. El circuito R-C serie “Malla de
adaptación” adapta niveles de señal de los elementos y bloquea
componentes continuas (no usar condensador electrolı́tico!)
Figura 11: Oscilograma de respuesta del PLL ante un barrido
de frecuencia.
Figura 10: Configuación global de bloques en el laboratorio.
Mediante el módulo de prueba será posible observar el
rango de enganche y el rango de captura barriendo en un
rango de frecuencias mayor que el rango de enganche. El
barrido debe ser lo suficientemente lento como para dar un
tiempo adecuado para la captura. En la práctica ésto significa
barrer a unos pocos [Hz], lo cual dificultará observar las
señales en el osciloscopio. Adicionalmente, al aplicar señales
de frecuencia baja al osciloscopio, deben acoplarse las entradas
en modo DC, ya que el acoplo AC produce atenuaciones y
desfases significativos de las componentes de baja frecuencia.
Los osciloscopios con retencion de imagen facilitan el trabajo.
Utilizando el osciloscopio en modo X-Y, podrá obtenerse la
caracterı́stica de transferencia frecuencia-voltaje de error del
PLL y medir ası́ su comportamiento dinámico en frecuencia:
rangos de enganche y captura. La figura siguiente muestra
el resultado de realizar este tipo de conexión en un circuito
simulado mediante Simulink
Para determinar la respuesta voltaje de control del VCO
vs. frecuencia de entrada (linealidad), es preferible realizar
mediciones estáticas: se varı́a paso a paso la frecuencia de
entrada y en cada caso se mide el voltaje continuo a la entrada
del VCO.
IV.
P RE I NFORME
IV-A. Aspectos Teóricos
1. Simule una señal modulada en frecuencia mediante señal
modulante sinusoidal y observe el espectro en escala
logarı́tmica para diversos valores de β (que puedan
lograrse fácilmente en el laboratorio, como los nulos de
la portadora y las distintas bandas laterales). Considere
casos de banda ancha y de banda angosta e indique
los valores respectivos de β. Reemplace la modulación
senoidal por una onda cuadrada y/o una señal triangular.
Estime el ancho de banda de la señal de FM resultante. NOTE QUE EN ESCALA LOGARÍTMICA SE
APRECIAN COMPONENTES ESPECTRALES CUYO
NIVEL PUEDE ESTAR 20, 30 O MÁS dB BAJO LAS
COMPONENTES RELEVANTES. AL ESTIMAR EL
ANCHO DE BANDA SOLO SE CONSIDERA EL RANGO QUE INCLUYE TODAS LAS COMPONENTES
RELEVANTES (o sea las que combinadas aportan el
alrededor del 98 % de la potencia). Estime el ancho
de banda usando regla de Carson y compare con lo
observado en los espectros. En el caso de modulación
con señal no sinusoidal considere para la aplicación de
la regla de Carson la primera armónica de la señal
modulante. Deben traer al Laboratorio una hoja con los
espectros graficados y los valores de β correspondientes,
de manera que al generarlos con el VCO se puede realizar
de inmediato la comparación.
Para medir la desviación de frecuencia que tiene un
modulador existen dos posibilidades:
Método estático: aplicar (y medir) voltajes continuos a
la entrada de control y medir para cada valor de voltaje
de entrada la frecuencia de salida. Esto por lo general
no es cómodo para frecuencias elevadas, pues dado que
las variaciones de frecuencia son relativamente pequeñas
comparadas con la frecuencia central (como ocurre en
FM comercial), implica medir frecuencias en forma muy
precisa.
Método dinámico: Aplicar una señal sinusoidal de frecuencia y amplitud medibles a la entrada de control y
aprovechar que para determinados valores de β conocidos
se anulan ciertas componentes.
El primer método en esencia consiste en obtener la
caracterı́stica de conversión: (variación de frecuencia de
salida/variación de voltaje de control) del VCO. El segundo método tiene la ventaja de que la única frecuencia
9
2.
3.
4.
5.
que debe medirse es la de la señal modulante, lo cual
es mucho más sencillo que medir la de la portadora
modulada. Ambos métodos obviamente deben conducir
al mismo resultado. En el laboratorio se deberán ensayar
ambos procedimientos y se deberá contrastar durante
la realización de la experiencia que los resultados son
coincidentes entre si y que además corresponden a las
especificaciones teóricas del circuito integrado (ver punto
siguiente). Especifique mediante diagramas en bloque como y con que instrumentos realizará estas de mediciones
y como verificará si los resultados que está obteniendo son consistentes entre sı́. Prepare una tabla en que
anotará en el laboratorio los datos de las mediciones
indicando, que variables medirá.
Determine el valor teórico del factor de conversión:
cambio de frecuencia de salida/cambio de voltaje de
señal de control [kHz/Volt] del VCO, en función de RB .
Considere Vcc = 12V.
Simule la configuracion del conjunto VCO/PLL y observe
en ella caracterı́sticas como rango de enganche y captura
y respuesta a escalón de frecuencia. Observe también
como depende el nivel residual de la componente de doble
frecuencia, de la caracterı́stica del filtro del lazo. Simule
el caso en que el objetivo del PLL es la recuperación de
portadora. Para ello aplique una señal senoidal de entrada
sin modulación de frecuencia, pero contaminada por ruido
aditivo. En este caso se debe comparar la señal de entrada
al detector de fase con la señal que genera el VCO del
PLL. Esta última deberia exhibir mucho menos ruido que
la de entrada y debiera estar enganchada en fase con ella.
Explique cómo diseñará el módulo de prueba y con que
criterio elegirá la resistencia R y el condensador C de la
figura 10. Además, escoja valores para los componentes
involucrados en el diseño de los modulos de VCO y PLL
respectivamente).
Describa el procedimiento que utilizará para medir los
siguientes parámetros del PLL:
-rango de enganche
-rango de captura
-ancho de banda (-3[dB])
-respuesta a escalón de frecuencia
V.
P ROCEDIMIENTO E I NFORME F INAL
1. Verifique el comportamiento estático del VCO. Mida
linealidad variando Vu en un rango tal que la frecuencia
varı́e en un rango de +/- 10 % de la frecuencia central.
Registre la frecuencia de salida del VCO y dibuje en el
laboratorio la curva ∆f v/s Vu . Contraste en el laboratorio
los resultados empı́ricos con los valores teóricos para
verificar si está realizando bien el procedimiento de
medición.
2. Implemente el modulador de FM sin la malla de preénfasis (VCO sin PLL) y aplique una señal senoidal de amplitud y frecuencia apropiada. Observe con osciloscopio
y analizador de espectros la salida del VCO. Variando la
amplitud de la señal modulante a una frecuencia dada, y
viceversa, observe las modificaciones en el espectro de la
señal de FM. Genere FM banda angosta y banda ancha
y observe dependencia (si es que existe) entre ancho de
banda de la señal de FM, amplitud y frecuencia de la
señal modulante. Use un mezclador y un oscilador para
trasladar el espectro generado a la banda de FM comercial
de manera que se pueda recibir con un radio-receptor.
Comente lo observado.
Al conectar la señal de salida del VCO al analizador
de espectros tenga en consideración la posibilidad
de niveles de señal peligrosos para el analizador, la
necesidad de bloqueo de la componente continua y
la adaptación de impedancias. Para medir la señal
sinusoidal a la entrada del VCO, conecte el osciloscopio en el terminal mismo del VCO para evitar
el posible efecto del condensador de acoplo. Esto es
particularmente importante para frecuencias bajas,
para las cuales la aproximación de que el condensador
es un cortocircuito puede no ser válida.
3. Efectúe mediciones en el analizador de espectro para
valores de β usados en el preinforme (simulaciones) y
compare con valores teóricos. Especifique para cada caso
los valores de amplitud y frecuencia (a la entrada del
VCO), de la señal modulante. Contraste en el laboratorio
la consistencia de lo medido en forma estática (punto 1 de
esta lista) y lo medido en forma dinámica en este punto.
Observe también el espectro producido por modulación
con onda cuadrada.
4. Arme el circuito PLL sin VCO, en configuración con
filtro simple; aplique una sinusoide directamente de un
generador de señales a la entrada del circuito PLL y
determine el rango de enganche y de captura variando
(paso a paso) la frecuencia de entrada. Para determinar si
el PLL está enganchado observe la señal de entrada y la
salida del VCO del PLL. Ambas señales deben tener la
misma frecuencia; mientras ello no ocurra, no tiene
sentido continuar. Tome nota del desfase entre la señal
de entrada y la salida del VCO y del cambio que este
desfase sufre al variar la frecuencia de entrada. Observe
además el residuo de componente de doble frecuencia
presente en el pin 7 del PLL. Este se debe que el filtro
pasabajos no elimina completamente la doble frecuencia
generada en el detector de fase, particularmente si la
frecuencia de entrada está cerca del lı́mite inferior del
rango de enganche. Mida la frecuencia de oscilación
libre del PLL. Mida linealidad del PLL (voltaje continuo
de salida del pin 7 vs. frecuencia de entrada al PLL).
Observe que la salida del pin 7 contiene, fuera del nivel
continuo que controla al VCO una apreciable componente
alterna. Para medir el nivel continuo lo más sencillo es
usar un tester en escala DC.
5. Arme el módulo de prueba (VCO, malla de adaptación,
PLL) y observe:
a) Rango de captura y enganche
b) Linealidad del PLL dentro del rango de enganche
c) Respuesta a escalón de frecuencia (overshoot).
Aumente el valor del condensador del filtro de lazo
(con tres valores distintos de C’s basta) hasta observar
10
claramente como ello reduce la estabilidad ante
transientes y a la vez reduce el residuo de doble
frecuencia.
d) Ancho de banda de -3 [dB]. Se aumenta la frecuencia
de modulación de la señal que entra al PLL, observando
la señal demodulada. Cuando se aumenta gradualmente
la frecuencia de modulación del VCO externo se observará que a partir de algún valor de frecuencia el
voltaje alterno en el VCO del PLL (pin 7) comienza a
crecer hasta alcanzar un máximo. Esto es el “peak de
resonancia” del lazo de control que constituye el PLL. Al
seguir aumentando la frecuencia modulante, la amplitud
de la señal en el pin 7 comienza a decaer rápidamente.
Cuando la amplitud de decae en 3[dB] respecto del valor
a frecuencias muy bajas, se ha llegado a la frecuencia
de corte y de ahı́ en adelante el PLL seguirá cada vez
menos la modulación de la señal de entrada. La reducción
del “jitter” aprovecha precisamente esta caracterı́stica.
Fluctuaciones muy rápidas de la frecuencia de entrada
(“jitter de frecuencia”) no son seguidas por el PLL que
entrega a la salida del VCO una señal cuya frecuencia
es igual al promedio de la frecuencia de entrada. Para
observar esto aumente la frecuencia de modulación del
VCO externo mucho más allá de la frecuencia de corte
de -3[dB] del PLL. Observe la señal de entrada al PLL
(pin 2) y la señal de salida del VCO interno (pin 5) para
observar la reducción del jitter.
Recuerde que para una visualización correcta de los
puntos a) y b) usando el modo X-Y del osciloscopio,
es necesario barrer lentamente y acoplar las señales DC
ya que los condensadores atenúan y desfasan las señales
a frecuencias tan bajas.
6. Resultados y conclusiones de las mediciones realizadas
en la experiencia. Comparación con resultados de la
simulación.
VI.
B IBLIOGRAF ÍA
1.- F. G. Stremler: Sistemas de Comunicación. Fondo
Educativo Interamericano; México, 1982.
2.- National Semiconductor: Linear Databook 1980.
3.- www.minicircuits.com
4.- Signetics Corporation: Analog Data Manual 1977,
Sección 26; ”Phase Locked Loop”, pp 309
5.- National Semiconductor: Linear Applications
Handbook, Application Note 46: ”The Phase Locked
Loop IC as a communications system building block”,
AN46-1
6.- National Semiconductor : Linear Databook
7.- B. P. Lathi: Modern Digital and Analog
Communication Systems, Third Edition, 1998
MDM/RFL/SOS/IAJ 2011
 0
0
Anuncio
Documentos relacionados






Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados