Cátedra Elementos de maquinas
Anuncio

Universidad Tecnológica Nacional
Unidad Académica Río Gallegos
Departamento: Ingeniería Electromecánica
Trabajo Práctico final
Cátedra
Elementos de maquinas
Titulo
TRANSMISIÓN DE POTENCIA A UN
MOLINO DE BOLAS
Autor
Choque Raúl R.
Profesor
Ing. Greinhard, Rodolfo
Año
2006
Universidad Tecnológica Nacional
Unidad Académica Rio Gallegos
Departamento: Ingeniería Electromecánica
Cátedra: Elementos de Maquinas
Planilla de Seguimiento
Tema/Título:
Transmisión de Potencia a un Molino Bolas
Alumno:
Choque Raúl
Legajo:
27-1371-0
Cátedra:
Elementos de Maquinas
Profesor:
Ing. Rodolfo
Profesor que verifica:
Control de Tareas
Informes:
1º
2º
3º
4º
1ra Revisión
2da Revisión:
Vº Bº
EXAMEN FINAL
REALIZADO EL:
CALIFICACIÓN:
JURADO
1º Vocal
Presidente
2º Vocal
Índice
Capítulo 1 Memoria descriptiva del molino de bolas
i.
ii.
iii.
Introducción. Funcionamiento de un molino de bolas
Velocidad y dimensiones recomendadas
Partes principales
1
2
4
Capitulo 2 MEMORIA TECNICA DE LA TRANSMISION DE POTENCIA A UN MOLINO DE
BOLAS
A. Calculo de dimensiones y potencia del molino
B. Calculo de engranajes
Calculo por medio de la ecuación de Lewis
Calculo por ecuación de Buckingham
Comprobación al desgaste del piñón
Verificación de engranajes por norma AGMA
C. Calculo de correas y poleas
Selección de motor
Inicio de cálculo de correa.
Plano sección correa y poleas
Plano diagrama de esfuerzos
Plano ciclo de esfuerzo de correa
Plano polea motora
D. Calculo de arbol transmisor de potencia, rodamientos y dimensiones
restantes de polea.
Introducción
Esquema de la transmisión
Datos del sistema y selección de material
Análisis de fuerzas que actúan en la rueda dentada
Procedimiento de dimensionamiento y de verificación
Esquema perspectivado del arbol
Momento flector resultante y momento torsor
5
9
11
14
15
Calculo de diámetro D3 y D5 por formula ASME
55
Escalonamientos
Rodamiento radial a rodillos
Escalonamientos y valores paro los diámetros D1, D2, D6 y D7
Rodamiento radial a bolillas
Longitud del cubo de polea conducida
Verificaron por ASME
Verificación por solicitaciones variables, conforme Teoría de la
máxima tensión tangencial
56
57
Secciones transversales de chavetas y chaveteros
66
Otra forma de calcular con normas IRAM, los chaveteros
Plano chavetero
Plano arbol
Plano polea conducida
Plano general
68
70
71
72
73
21
23
37
38
39
40
41
42
43
44
46
47
52
59
60
61
ANEXO 1: Estudio de la influencia del arranque en el calculo de los engranajes
Análisis del sistema durante el arranque
Cálculos
Ecuación de lewis
Ecuación de Buckingham para carga dinámica
74
75
78
80
ANEXOS:
Datos de motor
Datos de molino
Datos de bolas de molino
Bibliografía
Ultima
hoja
GRAFICOS
Curvas de índice de trabajo del molino de bolas, según CEMTEC
7
TABLAS
Tamaños y dimensiones estándar de los molinos fabricados por CEMTEC
8
UTN uarg
TP : Transmision de potencia a un Molino de bolas
memoria descriptiva
alumno: Choque Raúl
MEMORIA DESCRIPTIVA DEL MOLINO DE BOLAS
INTRODUCCION
El molino de bolas es utilizado para reducir a polvo la materia prima mediante la rotación de un
tambor que contiene bolas de acero o de otro material.
El cilindro metálico tiene las paredes reforzadas con material fabricado de aleaciones de acero al
manganeso. Estas molduras van apernadas al casco del molino y se sustituyen cuando se gastan.
El molino gira y la molienda se realiza por efecto de la bolas de acero al cromo o manganeso que,
al girar con el molino, son retenidas por las ondulaciones de las molduras a una altura
determinada, desde donde caen pulverizando por efecto del impacto el material mineralizado
mezclado con agua.
Ejemplo: Concentración de la roca al mineral de cobre
El objetivo del proceso de concentración es liberar y concentrar las partículas de cobre que se
encuentran en forma de sulfuros en las rocas mineralizadas, de manera que pueda continuar a
otras etapas del proceso productivo. Generalmente, este proceso se realiza en grandes
instalaciones ubicadas en la superficie, formando lo que se conoce como planta, y que se ubican lo
más cerca posible de la mina. El proceso de concentración se divide en las siguientes fases:
1) Chancado.
2) Molienda.
3) Flotación.
Etapa 1: Chancado
El mineral proveniente de la mina presenta una granulometría variada, desde partículas de menos
de 1 mm hasta fragmentos mayores que 1 m de diámetro, por lo que el objetivo del chancado es
reducir el tamaño de los fragmentos mayores hasta obtener un tamaño uniforme máximo de ½
pulgada (1,27 cm).
Para lograr el tamaño deseado de ½ pulgada, en el proceso del chancado se utiliza la combinación
de tres equipos en línea que van reduciendo el tamaño de los fragmentos en etapas, las que se
conocen como etapa primaria, etapa secundaria y terciaria. En la etapa primaria, el chancador
primario reduce el tamaño máximo de los fragmentos a 8 pulgadas de diámetro.
En la etapa secundaria, el tamaño del material se reduce a 3 pulgadasEn la etapa terciaria, el
material mineralizado logra llegar finalmente a ½ pulgada.
Los chancadores son equipos eléctricos de grandes dimensiones. En estos equipos, los elementos
que trituran la roca mediante movimientos vibratorios están construidos de una aleación especial
de acero de alta resistencia. Los chancadores son alimentados por la parte superior y descargan el
mineral chancado por su parte inferior a través de una abertura graduada de acuerdo al diámetro
requerido. Todo el manejo del mineral en la planta se realiza mediante correas transportadoras,
desde la alimentación proveniente de la mina hasta la entrega del mineral chancado a la etapa
siguiente.
El chancador primario es el de mayor tamaño (54' x 74', es decir 16,5 m de ancho por 22,5 m de
alto). En algunas plantas de operaciones, este chancador se ubica en el interior de la mina (cerca
de donde se extrae el mineral) .
Cátedra: elemento de maquinas
Dto: electromecánica
1
UTN uarg
TP : Transmision de potencia a un Molino de bolas
memoria descriptiva
alumno: Choque Raúl
Etapa 2: La Molienda
Mediante la molienda, se continúa reduciendo el tamaño de las partículas que componen el
mineral, para obtener una granulometría máxima de 180 micrones (0,18 mm), la que permite
finalmente la liberación de la mayor parte de los minerales de cobre en forma de partículas
individuales.
El proceso de la molienda se realiza utilizando grandes equipos giratorios molinos de forma
cilíndrica, en dos formas diferentes: molienda convencional o molienda SAG. En esta etapa, al
material mineralizado se le agregan agua en cantidades suficientes para formar un fluido lechoso y
los reactivos necesarios para realizar el proceso siguiente que es la flotación.
Molienda convencional
El mineral se mezcla con agua para lograr una molienda homogénea y eficiente. La pulpa obtenida
en la molienda es llevada a la etapa siguiente que es la flotación.
Un molino, de dimensiones son 16 x 24 pies (es decir, 4,9 m de diámetro por 7,3 m de ancho),
está ocupado en un 35% de su capacidad por bolas de acero de 3,5 pulgadas de diámetro, las
cuales son los elementos de molienda. En un proceso de aproximadamente 20 minutos, el 80% del
mineral es reducido a un tamaño máximo de 180 micrones.
Etapa 3: La Flotación
La flotación es un proceso físico-químico que permite la separación de los minerales sulfurados de
cobre y otros elementos como el molibdeno, del resto de los minerales que componen la mayor
parte de la roca original.
La pulpa proveniente de la molienda, que tiene ya incorporados los reactivos necesarios para la
flotación, se introduce en unos receptáculos como piscinas, llamados celdas de flotación. Desde el
fondo de las celdas, se hace burbujear aire y se mantiene la mezcla en constante agitación para
que el proceso sea intensivo.
Los reactivos que se incorporan en la molienda tienen diferentes naturalezas y cumplen diferentes
funciones:
Reactivos espumantes: tienen como objetivo el producir burbujas resistentes. Reactivos colectores:
tienen la misión de impregnar las partículas de sulfuros de cobre y de molibdeno para que se
separen del agua (efecto hidrófobo) y se peguen en las burbujas.
Reactivos depresantes: destinados a provocar el efecto inverso al de los reactivos colectores para
evitar la recolección de otros minerales como la pirita, que es un sulfuro que no tiene cobre.
Otros aditivos: como la cal sirven para estabilizar la acidez de la mezcla en un valor de pH
determinado, proporcionando el ambiente adecuado para que ocurra todo el proceso de flotación.
Las burbujas arrastran consigo los minerales sulfurados hacia la superficie, donde rebasan por el
borde de la celda hacia canaletas que las conducen hacia estanques especiales, desde donde esta
pulpa es enviada a la siguiente etapa El proceso es reiterado en varios ciclos, de manera que cada
ciclo va produciendo un producto cada vez más concentrado. En uno de estos ciclos, se realiza un
proceso especial de flotación para recuperar el molibdeno, cuyo concentrado alcanza una ley de
49% de molibdenita (MoS2). ¿Cuál es el producto del proceso de flotación?
Luego de varios ciclos en que las burbujas rebasan el borde de las celdas, se obtiene el
concentrado, en el cual el contenido de cobre ha sido aumentado desde valores del orden del 1%
(originales en la roca) a un valor de hasta 31% de cobre total. El concentrado final es secado
mediante filtros y llevado al proceso de fundición
VELOCIDAD Y DIMENSIONES RECOMENDADAS DEL MOLINO
El recipiente cónico o cilíndrico dispuesto en forma horizontal nunca longitud debe exceder en
1,5 veces su anchura.
2Cátedra: elemento de maquinas
Dto: electromecánica
UTN uarg
TP : Transmision de potencia a un Molino de bolas
alumno: Choque Raúl
memoria descriptiva
La conminución ocurre principalmente por los mecanismos de impacto y atrición. Cuando el cilindro
empieza a rotar, las bolas son empujadas por la fuerza centrifuga hacia la pared superior del
cilindro. Las bolas que están más arriba viajan más rápido que las que están abajo; la velocidad
óptima ocurre cuando las bolas forman un movimiento de cascada. Durante el movimiento, se
produce un mecanismo de fricción entre las bolas, y éstas, al caer impactan y fragmentan el
material.
La velocidad crítica es aquella en que las bolas no forman el movimiento de cascada sino que rotan
a la misma velocidad que el cilindro.
La velocidad óptima varía entre el 50 y 75% de la velocidad crítica. Entre más grande sea el
molino, menor será la velocidad crítica y viceversa. La molienda es más eficiente si las bolas ocupan
entre el 30 - 50% del volumen del molino.
El material a pulverizar debe colocarse de forma tal que cubra todas las bolas, nunca más porque
siempre debe haber algo de contacto total entre las bolas. Por tal razón, se logrará una mayor
eficiencia si se disminuye la cantidad de espacios muertos entre éstas. La duración de la
conminución puede variar desde horas hasta días dependiendo de la dureza del material. Sin
embargo, el equipo tiene la opción de recolectar el material a ciertos intervalos de tiempo. Para
conseguir una molienda eficaz no se debe de exceder la velocidad crítica, que se define como la
velocidad a la cual una bola pequeña esférica dentro del molino empieza a centrifugar. Se puede
mostrar que la velocidad crítica Nc en r.p.m. viene dada por:
Nc = (42.3)/(D)1/2
siendo D el radio del molino en metros.
En la práctica, la velocidad de operación óptima es alrededor del 75% de la velocidad crítica y se
debe determinar en condiciones de utilización en la instalación industrial.
Las bolas de menor tamaño producen menos vacíos porque éstas tienen mayor área de contacto
por unidad de peso. Comercialmente se dispone de bolas de acero inoxidable de 1.27 - 5.08 cm
que no reaccionan con el material, además, se sanitizan y esterilizan fácilmente evitando su
contaminación. Entre más pesadas sean las bolas más polvos finos generará. La ventaja del equipo
es que puede obtener partículas muy finas, además de ser bueno para materiales duros y
abrasivos, también mantiene un control hermético del polvo, y es bueno para polvos estériles
porque el cilindro se puede llenar con un gas inerte para evitar su contaminación. Su desventaja es
que el material de introducción no debe ser mayor de 1000 µM, por lo tanto el éste debe ser
previamente premolido.
Cátedra: elemento de maquinas
Dto: electromecánica
3
UTN uarg
TP : Transmision de potencia a un Molino de bolas
alumno: Choque Raúl
memoria descriptiva
Estructuralmente cada tipo de molino consiste de un casco cilíndrico, con revestimientos renovables
y una carga de medios de molienda. El tambor es soportado en muñones huecos fijos a las paredes
laterales de modo que puede girar en torno a su eje. El diámetro del molino determina la presión
que puede ejercer el medio en las partículas de mena y, en general, mientras mayor es el tamaño
de la alimentación mayor necesita ser el diámetro. La longitud del molino, junto con el diámetro,
determina el volumen y por consiguiente la capacidad del molino.
La mena normalmente se alimenta continuamente al molino a través del muñón de un extremo, y
el producto molido sale por el otro muñón.
Partes Principales de un Molino
Casco : El casco del molino está diseñado para soportar impactos y carga pesada, y
está construido de placas de acero forjadas y soldadas. Tiene perforaciones para sacar los pernos
que sostienen el revestimiento o forros. Para conectar las cabezas de los muñones tiene grandes
flanges de acero generalmente soldados a los extremos de las placas del casco, los cuales tienen
perforaciones para apernarse a la cabeza.
Extremos: Los extremos del molino, o cabezas de los muñones pueden ser de
fierro fundido gris o nodular para diámetros menores de 1 m. Cabezas más grandes se construyen
de acero fundido, el cual es relativamente liviano y puede soldarse. Las cabezas son nervadas para
reforzarlas.
Revestimientos: Las caras de trabajo internas del molino consisten de
revestimientos renovables que deben soportar impacto, ser resistentes a la abrasión y promover el
movimiento más favorable de la carga. Los extremos de los molinos de barras tienen
revestimientos planos de forma ligeramente cónica para inducir el centrado y acción rectilínea de
las barras. Generalmente están hechas de acero al manganeso o acero al cromo-molibdeno, con
alta resistencia al impacto (también los hay de goma ). Los extremos de los molinos de bolas
generalmente tienen nervaduras para levantar la carga con la rotación del molino. Ellos impiden
deslizamiento excesivo y aumentan la vida del revestimiento. generalmente están hechos de fierro
fundido blanco aleado con níquel ( Ni-duro) y otros materiales resistentes a la abrasión, como
goma. Los revestimientos de los muñones son diseñados para cada aplicación y pueden ser
cónicos, planos y con espirales de avance o retardo.
Los revestimientos del molino son un costo importante en la operación del molino y
constantemente se está tratando de prolongar su vida. En algunas operaciones se han
reemplazados los revestimientos y elevadores por goma. Se ha encontrado que ellos son más
durables, más fáciles y rápidos de instalar y su uso resulta en una significativa reducción del nivel
de ruido. Sin embargo se ha informado que producen un aumento en el desgaste de medios de
molienda comparados con los revestimientos Ni-duro. Los revestimientos de goma también pueden
tener dificultades en procesos que requieren temperaturas mayores que 80ºC.
4Cátedra: elemento de maquinas
Dto: electromecánica
UTN
UARG
calculo de engranaje
tp molino de bolas
choque raul
hoja
Calculo de Dimensiones del Molino de Bolas
L= D . R
Donde:
L, Largo del molino, [m], (0→18,288)
D, Diámetro interior molino, [m], (0→9,144)
r, Razón L/D, (0→2)
tomando un valor de r, comun y una longitud L
hallamos el diametro
L=
3 m
D=L/r=
2,0 m
r = 1,5
L
D
Calculo Cinematico de la velocidad del giro molino
La velocidad óptima varía entre el 50 y 75% de la velocidad crítica
En la práctica, la velocidad de operación óptima es alrededor del 75% de la velocidad crítica y
se debe determinar en condiciones de utilización en la instalación industrial.
Nc= Ncrit.φ
Donde:
Nc, Velocidad giro molino, rpm
φ, Fracción velocidad crítica utilizada, %, (0→100)
φ = 75 %
Ncrit, velocidad crítica rotación molino.
La velocidad crítica es aquella en que las bolas no forman el movimiento de cascada sino que
rotan a la misma velocidad que el cilindro.
Ncrit = (42.3)/(D)1/2
D, Diámetro interior molino, m,(0→9,144)
Ncrit= 29,9 rpm
Nc= 22,4 rpm
velocidad angular de giro del molino
CURVAS DE INDICE DE TRABAJO QUE PASA AL 80% (ENTRADA O SALIDA DEL PRODUCTO)
tamaño del material en micrones
TAMAÑO Y DIMENSIONES ESTANDAR
UTN
UARG
CALCULO DE ENGRANAJE, ecuacion de Lewis
TP MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
CALCULO POR MEDIO DE LA ECUACION DE LEWIS
Potencia a transmitir,
P=
132 kw = 179,5 CV
Diametro Primitivo del piñon, D1=
32 cm
n 2=
22,43
rpm
Vel. angular de la rueda,
envolvente del diente :
20 °
Servicio : uniforme intermitente
Relacionde velocidad
mw ≅
diamtro exterior de la rueda:
diamtro exterior del piñon:
w1 n1 D2 N 2
=
=
=
w2 n2 D1 N1
2,842
0,342
n1 = mw . n2 =
m
m
n 1=
subindice 1: rueda motora, piñon
subindice 2: rueda conducida
mw ≈ 8,31
186 rpm
considerando servicio uniforme (no se considera desgaste)
Tomamos la carga dinamica como funcion de velocidad unicamente
Velocidad en la circunferencia primitiva
vm= π . D1 . n1 =
Carga transmitida
Ft =
vm=
4500.P[CV ]
vm
187,3 m/min
Ft =
4313,4 kg
La vm =
187,3
m/min
cae dentro del intervalo superior aceptable para dientes
tallados comercialmente, pero supongamos que los dientes esten tallados cuidadosamente, entonces la
carga dinamica se calcula por la ec
Fd =
366 + vm
⋅ Ft
366
Fd=
6521
kg
Con dientes tipo intercambiables y con material del piñon mas duro, los dientes de la rueda son los
mas debiles. Entonces comprobamos para la, rueda, los esfuerzos. Seleccionamos los siguientes
materiales para la rueda y el piñon, luego de considerar diferentes materiales, modulos y tamaños.
material
C1095
(revenido en aceite)
4140
Su(kg/cm²)
12373
18980
S´n
6187
9490
Sy (kg/cm²)
7874
16943
NDB
363
534
TABLA AT 9 FAIRES
rueda
piñon
S´n=0,5.Su
En la ecuacion de Lewis hay todabia cuatro incognitas: b, M, Y, Kf; asi pues, debe ser resuelta pór
tanteo
Sea Kf =
1,6
(esto se aproximara bastante, para carga superior del diente 1,2 - 1,7)
Sea b(mm) = 10.M (mm), que esta dentro del intervalo generalmente deseado
Cuando se utiliza la ec. De Fd anterior, la hipotesis tradicional es que un diente puede soportar la
plena carga en la punta o parte superior; por tanto, adoptemos un valor apropiado de Y para esta
configuracion. Como Y no varia acusadamente, es adecuado algun valor razonable, para una
solucion en primera aproximacion.
0,32
Y=
(Tabla AT 24, FAIRES)
UTN
UARG
CALCULO DE ENGRANAJE, ecuacion de Lewis
TP MOLINO DE BOLAS
Con la admision de estas diversas hipotesis, llegamos ha:
FS = Fd =
6521
kg =
s b
⋅ ⋅Y ⋅ M
k f 10
6186,5 kg/cm². M .
1,60
10
0,32
.M
CHOQUE RAUL
HOJA:
este valor de M nos da una idea
del tamaño del engranje, luego de
hacer varias pruebas llegamos a
la conclusion de elegir las
siguientes valores para el "M" y
"b"
7,3
M ≈ 10
Si suponemos que las herramientas de corte de que se dispone tinen un modulo de 8 o 10, elegimos
uno de estos modulos y probamos la resistencia; elegimos 10.
Un procedimiento bueno es hallar el valor de "b" que iguala la resistencia a la carga dinamica.
Para
D
Np = 32
dientes del piñon
N P = P = 320 mm
M
10
Tenemos
Y=
y utilizamos Kf =
FS =
s b
⋅ ⋅Y ⋅ M =
k f 10
0,364
tb AT 24, Faires
1,60 como antes
6521 kg = 6187 kg/cm².
1,60
b=
b.
0,364
10
10
4,6 cm
comprobacion de la proporcion
b(mm)
46,3
=
=
4,6
M
10
aumentamos b para estas dentro del intervalo recomendado
por consiguiente es satisfactorio. Para
mw=
Ng= mw . M =
b (cm)
11
266
Np
32
que no esta dentro del
intervalo de 8 a 12,5
b:
b(mm)/M=
8,31 , tenemos
dientes en la rueda
Por consiguiente una solucion es
M
10
.
Ng
266
110 mm
11,00
UTN
UARG
calculo de engranaje, ecuacion de Buckingham
tp molino de bolas
choque raul
hoja:
CALCULO POR ECUACION DE BUCKINGHAM PARA CARGA DINAMICA
Tenemos:
vm =
Ft =
187,3
4313
m/min
kg
Hallamos el maximo error admisible por la figura AF 19, entrando con vm
187
entonces e =
0,010 cm
error maximo para
funcionamiento satisfactorio
Los calculos preliminares sugieren un modulo M:
10
Entrando en al figura AF20 con el valor de M y
e=
0,010 cm
Decidimos que los dientes deben ser tallados esmeradamente
0,0042
UTN
UARG
calculo de engranaje, ecuacion de Buckingham
tp molino de bolas
tenemos un error probable
choque raul
hoja:
0,0042 cm
Utilizamos e =
0,0042 cm
para dientes de altura completa y de
k = 0,111.e
y por tanto para nuestro caso
20 °
k=
0,0004662
Con dientes tallados esmeradamente y la carga dinamica de Buckingham, podemos suponer que la
carga es compartida por dos dientes hasta que el punto de aplicación se ha desplazado la mitad del
perfil aproximadamente.
Por la ecuacion
C=
k .E g .E p
Eg + E p
2109000
para el Acero Eg = Ep =
kg/cm²
Hallamos
C= 491,61
para una cara de anchura b =
Fd = Ft +
11,0 cm
obtemos por la ecuacion de Buckingham
0,164. v m .(b . C+ Ft )
0,164. v m + 1,484.(b . C+ Ft ) 2
1
=
kg
m ⎛
⎞
+ 4313 kg ⎟
.⎜11cm .491,61
cm
min ⎝
⎠
=
Fd = 4313 kg +
1
2
kg
m
⎛
⎞
+ 1,484.⎜11cm .491,61
+ 4313 kg ⎟
0,164.187,3
cm
min
⎝
⎠
0,164.187,3
Fd= 4313,4 +
298582,9
169,04
Fd=
6079,7
kg
El coeficiente de reduccion de la resistencia a la fatiga para la carga aplicada cerca de la linea media del
diente es mayor que con la carga aplicada en la parte superior; utilizamos
Kf= 1,7
por la tabla AT24, Np= Dp/M=
320 /
10 = 32,0
entrando con Np, carga cerca del centro y angulo del diente 20°, obtenemos
Y=
0,617
UTN
UARG
calculo de engranaje, ecuacion de Buckingham
tp molino de bolas
La resistencia del diente supuesto es,
Fs=
6186,5 . 11,0
1,7
10
El factor de servicio es Fs/Fd =
Fs =
.
s.b.Y .M
10.K f
0,617
4,1
choque raul
hoja:
.
10
=
24698,7
kg
(factor de seguridad)
Si este coeficiente no es satisfactorio, y ordinariamente es deseable algun margen de seguridad, se puede
utilizar un diente aun mayor, o un metodo mas exacto (y costoso) de fabricacion que reducira el error y
la carga dinamica. Por otra parte la ecuacion de Buckingham da resultados que caen dentro del lado de
seguridad.
Por lo tanto estos resultados confirman el primer calculo realizado sin tener en cuenta las cargas
dinamicas, la solucion es:
M
10
Np
32
Ng
266
b (cm)
fabricacion
11,0 talla esmerada
factor de seguridad
4,1
UTN
UARG
calculo de engranje
Tp molino de bolas
choque raul
hoja:
COMPRABACION AL DESGASTE DE LOS DIENTES DEL PIÑON
En este calculo se busca comprobar la carga limite al desgaste para los dientes del engranjes. Los
datos son:
M:
b:
Np:
mg :
Dp:
10
11,0 cm
32
8,3 (relacion de engrane Ng/Np)
32 cm
CV:
np:
Φ:
Fd:
Dg:
179,52
186
20
6079,7
266
rpm
°
kg
cm
Utilizando el valor previsor de la tabla AT26 para la combinacion de aceros propuesta en el trabajo
practico y envolvente de 20°, tenemos
Kg =
13,78
la sumatoria de la
dureza en BHN pasa el
valor recomendado por
la tabla, igual a
600BHN para una vida
superior a 4x10e7
rueda 367 BHN
piñon 534 BHN
-----------suma 901 BHN
El factor Q sera:
Q=
2.mg
1 + mg
=
1,785
Carga limite al desgaste
Fw= Dp . b . Q . Kg =
8659 kg
VERIFICA
>
Fd: 6080 kg
puesto que Fw =
8659
kg
estos engranjes deben durar indefinadamente si la fabricacion, el montaje y el mantenimiento se
hace correcta y cuidadosamente.
observacion: tambien podriamos haber hallado un valor de kg que, reemplazada en la ecuacion de Fw iguale el
valor de Fd, entonces seleccionar otros materiales que cumplan con esta dureza brinel.
UTN
UARG
Calculo de engranje, verificacion por AGMA
TP molino de bolas
choque raul
hoja:
VERIFICACION DE ENGRANJES POR NORMA AGMA
La capacidad de un engrane se mide en terminos de la resistencia transversal del diente y la
durabilidad de la superficie contra el desgaste por picadura. Las expresiones para calcular los
esfuerzos transversales y superficiales se iniciaron con las formulas de Lewis-Buckingham y en la
actualidad se extienden hasta las mas recientes formulas de AGMA.
La formula de Lewis para el analisis de la resistencia transversal, sirve para ilustrar los fundamentos
en los que se basan las formulas actuales. Buckingham modifico la formula de Lewis para incluir los
efectos dinamicos sobre la resistencia transversal y obtubo ecuaciones para evaluar los esfuerzos
superficiales. Otros investigadores hicieron mas modificaciones y dieron lugar las formulas mas
recientes de capacidades nominales de AGMA, las cuales constituyen la base de la mayor parte de los
diseños de los engrajes en EEUU.
Como primera medida se obtienen las características de los engranajes cuyos datos se detallan a
continuación:
Dientes
Pitch
Modulo
D. prim
n
Rp
Engranaje
[z]
[p]
[m]
[mm]
rpm
(mm)
piñon 1
32
2,54
10
320
186
160
corona 2
266
2,54
10
2659
22,43
1330
distancia entre centros de engranajes =
1490
La potencia de diseño es:
P = 132 kw
=
176,9
Con la potencia de entrada calculamos el momento de entrada
M A [Nm] =
22380.P[HP ] 22380.176,9hp
=
=
n A [rpm ].π
186rpm.π
6766,2
hp
Nm
De acuerdo a las relaciones de engranajes podemos calcular el momento en los ejes B
M 2 [Nm] =
22380.P[HP ]
=
n2 [rpm].π
Comprobación de los engranajes:
Datos del engranaje 1:
Nº de dientes [Z]
Modulo [m]
Ancho del diente [mm]
Dp [mm]
Material
Dureza aproximada [HB]
Datos del engranaje 2:
Nº de dientes [Z]
Modulo [m]
Ancho del diente [mm]
Dp [mm]
Material
Dureza aproximada [HB]
56226,6
Nm
32
10
110,0
320
4140
534
266
10
110,0
2659
1095
363
RESISTENCIA Y DURABILIDAD NOMINALES DE AGMA
AGMA Gear Rating Comitte ha obtenido ecuaciones de la resistencia transversal y durabilidad
superficial, adecuada para los engranajes modernos y dispuestos para la expansión o contracción de
los parámetros y los detalles determinantes, según los datos que se dispongan y las necesidades de
aplicación
Esfuerzo flexionante (st):
El esfuerzo superficial viene dado por la siguiente formula:
UTN
UARG
Calculo de engranje, verificacion por AGMA
TP molino de bolas
σ t [Mpa ] =
Wt [N ]
choque raul
hoja:
K a .K s .K m
K v .F [mm].m[mm]
J
Siendo:
Wt Carga tangencial transmitida:
.
Wt =
M t [Nm]
[N ] = 2000 ⋅ M t ( Nm)
1m
d p (mm)
d p [mm]⋅
2.1000mm
W1= 42289 N
Para el engranaje 1:
Para el engranaje 2:
W2= 42289 N
* Ka Factor de aplicación:
Se utiliza la siguiente tabla, se toma el valor
Ka:
1,25
Maquina movida
Maquina motriz
Uniforme
Choques moderados
Choques medios
Choques bruscos
Uniforme
1
1.25
1.55
1.75
Choques moderados
1.1
1.35
1.60
1.85
Choques medios
1.25
1.50
1.75
2
Choques bruscos
1.5
1.75
2
2.25
* Ks
Factor de tamaño:
Se puede tomar como 1.
* Km Factor de distribución de carga:
Se utiliza la siguiente tabla, se toma el valor :
Ks:
1
Km:
1,7
Ancho de la cara del diente [pulg.]
Característica de soporte
0-2
6
9
Mas de 16
Montajes exactos, engranajes de precisión
1,3
1.4
1.5
1.8
Montajes menos rígidos, engranajes menos exactos
1.6
1.7
1,8
2,2
El contacto es menor que en toda la cara
Mas de 2,2
* Kv
Factor dinámico:
Se utiliza un grafico, aunque para velocidades tangenciales bajas el factor tiende al valor 1.
Kv:
1
* J
Factor geométrico:
Se utiliza el siguiente grafico:
J:
0,41
266
0,41
32
UTN
UARG
Calculo de engranje, verificacion por AGMA
TP molino de bolas
* F
Ancho del diente
* m
Modulo
Finalmente tenemos:
Para el engranaje 1(piñon):
σ t1 [Mpa ] = 42288,7
σ t1 [Mpa ] =
42289[N ]
1,25.1.1,8
.
=
1.206[mm].18[mm] 0.32
1,3 .
1 .
1,7
110 mm 10 mm 0,41
N.
1
choque raul
hoja:
=
199,25 Mpa
Procedemos ahora al cálculo de los esfuerzos admisibles de la siguiente forma:
σ tadm [Mpa ] =
Siendo:
* σ s Carga admisible a fatiga:
σ s [Mpa ].K L
K T .K R
De acuerdo al tipo de material tenemos:
σs= 360 Mpa
* KL Factor de duración:
De acuerdo a la cantidad de ciclos esperados (N) antes de la falla y se calcula con la formula
siguiente:
K L = 1,3558 . N −0 , 0178
si el piñon gira a 22,43rpm; y queremos que
dure 10 años en servicio continuo entonces
N=22,43rpm.60min.24hs.365dias.10años=
1,18.e8 ciclos
Se toma como cantidad de ciclo el valor 1,179x10e8, lo que da una vida útil aproximada de 10 años.
El valor de KL obtenido es
UTN
UARG
Calculo de engranje, verificacion por AGMA
TP molino de bolas
choque raul
hoja:
Kl: 0,97
* KR Factor de confiabilidad:
Toma en cuenta las distribuciones estadisticas normales de las fallas en las pruebas de los
materiales
Se calcula de acuerdo a la posibilidad de ocurrir una falla, utilizando la siguiente tabla:
Probabilidades de falla
KR
0,01% (menos de una falla en 10000)
1,5
0,1% (menos de una falla en 1000)
1,25
1% (menos de una falla en 100)
1
10% (menos de una falla en 10)
0,85
Kr:
1,25
* KT Factor de temperatura:
De acuerdo a la temperatura de funcionamiento se puede tomar un valor de 1 para temperaturas
normales de funcionamiento.
Kt:
Calculamos los valores:
1
σ tadm5 [Mpa ] =
360[Mpa ].0,95
=
1.1,25
279,36 Mpa
VERIFICACION:
σ t1 [Mpa ] < σ tadm1 [Mpa ] ⇒
Factor de seguridad:
199,25
Mpa
≤
279,36
VERIFICA
Mpa
1,40
Esfuerzo superficial (σs), resistencia a la picadura
El esfuerzo de fractura viene dado por la siguiente formula:
σ s [Mpa ] = C P
Wt [N ].Ca .C S .C m .C f
Cv .DP [mm].F [mm].I
Siendo:
* Wt Carga tangencial transmitida: Calculado anteriormente.
* CP Coeficiente elástico:
lo obtemos de tabla
* Ca
* Cs
Factor de aplicación:
Es equivalente al factor Ka:
Factor de tamaño:
Cp:
191
Ca: 1,25
Mpa 1/2
UTN
UARG
Calculo de engranje, verificacion por AGMA
TP molino de bolas
Se puede tomar como
* Cm Factor de distribución de carga:
Es equivalente al factor Km.
* Cf
choque raul
hoja:
Cs: 1
Cm: 1,7
Factor condición superficial:
Se toma un valor de
Cf: 1
Toma en consideracion los efectos del corte, rectificacion, la limpieza con perdigones, etc., los
esfuerzos residuales y los efectos de plasticidad del trabajo en frio. Por ahora no se cuenta con
factores proporcionados poa la AGMA y debe aplicarse la unidad; sin embargo, si se sabe que existe
una condicion perjudicial en la superficie, debe emplearse un factor mayor que 1.
* Cv
Factor dinámico:
Es equivalente al factor Kv:
Cv: 1
* I
Factor geométrico:
Se utiliza la siguiente tabla:
I: 0,132
Los factores de geometria J e I toman en cuenta el efecto del perfil y la forma del diente sobre el
esfuerzo. En particular, el afactor J es analogo al factor Y de la ecuacion de la resistencia transversal
a la flexion de Lewis. El factor I relaciona los radio de curvatura de los perfiles en contacto de los
dientes , los cuales tienenefectos sobre los esfuerzos superfiales de contacto.
* Dp Diámetro primitivo
* F
Ancho del engranaje
Finalmente tenemos:
σ s1 [Mpa ] = 163[Mpa1 / 2 ]
42289[N ].1,25.1.1,8.1
=
1.320[mm].206,3[mm]0,116
839,98 Mpa
Procedemos ahora al cálculo de los esfuerzos admisibles de la siguiente forma:
σ sadm [Mpa ] =
Siendo:
· σs Carga admisible superficial:
De acuerdo al tipo de material tenemos:
σ s [Mpa ].C L .C H
C T .C R
UTN
UARG
Calculo de engranje, verificacion por AGMA
TP molino de bolas
σs :
1100
choque raul
hoja:
Mpa
· CL Factor de duración:
De acuerdo a la cantidad de ciclos esperados (N) antes de la falla y se calcula con la formula
siguiente:
C L = 1, 4488 . N −0 , 023
Se toma como cantidad de ciclo el valor 1,179x10e8, lo que da una vida útil aproximada de 10 años.
El valor de Cl obtenido es
Cl:
0,96
· CR Factor de confiabilidad:
Es equivalente al factor KR.
Cr:
1,25
· CH Factor de durezas:
Se toma como valor 1.
Ch:
1
· CT Factor de temperatura:
De acuerdo a la temperatura de funcionamiento se puede tomar un valor de 1 para temperaturas
normales de funcionamiento.
Ct=
1
Calculamos los valores:
σsadm:
VERIFICACION:
844,8 Mpa
σ s1 [Mpa ] < σ sadm1 [Mpa ]
839,975 Mpa
PORCENTAJE DE CARGA:
100,6 %
<
844,8 Mpa
VERIFICA
DIAMETRO MINIMO DE POLEA SEGÚN ABB (fabricante de motor)
Diametro de Polea
When the desired bearing life has been determined, the minimum permissible pulley diameter
can be calculated using FR, as follows:
donde:
D = diametro de la polea, mm
P = potencia requerida, kW
n = velocidad del motor, r/min
K = factor de tension por correa, depende del tipo de correa y tipo de aplicación a la que
sera destinada. Un valor comun es 2,5 parac correas en V
FR = Fuerza radial admisible
Carga admisible sobre los arboles
Las tablas dan los valores admisibles de fuerzas radiales en Newton, suponiendo fuerzas axiales
nulas. Los valores estan basados en condiciones normales a 50 hz y vida calculada de 20000hs
para los rodamientos de tamaños de motores 71 a 132 y para motores tamaños 160 a 450 de
20000 y 40000hs.
Si la fuerza radial es aplicada entre los puntos X0 y Xmax, la fuerza admisible FR puede ser
calculada con la siguiente formula:
E = largo del arbol de extension en version basica
Fuerza radiales admisibles por Motores tamaño 160 a 180
Elegimos un motor con rodamientos de rodillos, devido a la carga que debe transmitir t
necesidad de reducir la velocidad. Para una vida de 20000hs. Y correas en V
K:
2,5
Fxo:
56000 N
P:
160
Kw
Fxmax:
14000 N
n:
743
rpm
Tomamos como distancia "X" un punto medio del largo del arbol del motor
X:
105
mm
E:
210
mm
entonces
FR:
35000
N
D: 292,3 mm
(dimatro min. admitido por el motor según el fabricante)
Calculo de la potencia de entrada a los engranajes
Devido a que por la transmision por engranjes se produce perdida de potencia se debe aumentar
la potencia que llega a estos, según Faires esta potencia es menor o igual a 2 %, entyonces
nuestra potencia de diseño sera:
porcentaje de perdida:
potencia de calculo :
perdida de potencia:
potencia de diseño:
2
132
2,64
134,64
%
kw
kw
kw
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CALCULO DE POLEA Y CORREA
considerando
Datos:
N = Potencia nominal a transmitir=
134,6 kw
engranajes
ω1 = Pulsación polea motora (velocidad angular polea motora) = 2 * π * n1=
n1 = Velocidad rotacional polea motora = ω1 / (2 * π)
=
m = Relación de transmisión
CHOQUE RAUL
HOJA: 1
2%
perdidas
en
77,81
743 rpm
4
01º Paso: Determinación de la potencia de selección de correa
Potencia de selección o de servicio Ns, la cual aconsejan para el diseño de la transmision
Ns = N * fs ≥ N
donde:
fs: Si se trata de una máquina de servicio normal, con 6 a 16 horas diarias de funcionamiento
continuo, donde el poder de arranque ocasional o sobrecarga no exceda del 150% de la carga
nominal (arranque sin carga) y acoplada la máquina a un motor eléctrico de construcción con
rotor en cortocircuito, fs toma el valor de 1,2. Considerando que dicha situación responde a
nuestro caso, resulta de calcular:
Ns = 1,2 * N
Ns = 161,52 kw
=
216,5 HP
02º Paso: Tamaño de la sección transversal de la correa
El tamaño apropiado se selecciona con la potencia de selección Ns y la velocidad rotacional
(frecuencia) de la polea PEQUEÑA (en una instalación reductora de velocidad, la MOTORA),
Seccion adoptada:
multipolea
Fabricante Goodyear
tabla 4. Seccion de correa en V adecuada para la capacidad de fuerza requerida
el fabricante aclara que cuando el punto de
interseccion esta cerca de la linea divisoria de dos
tipo de seccion se puede elegir cualquiera de las
dos, elegimos seccion de correa tipo E
03º Paso Selección del RADIO primitivo mínimo de la polea PEQUEÑA
La correa soportará determinada carga; cuando más chico resulte el radio de la polea sobre la cual
debe arrollarse (flexionarse), mayor será la carga necesaria para producir dicho arrollamiento o flexión,
restándosele así a la correa aptitud para transmitir potencia; de ahí que exista un radio mínimo
recomendable para las poleas, a efectos disponer de capacidad para transmitir potencia.
Por otra parte, el radio mínimo recomendable aumentará conforme aumenten los tamaños de las
secciones transversales de la correa, atendiendo al siguiente esquema, como es el caso de las vigas
empotradas:
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 2
La figura representa una viga empotrada recta, de sección transversal constante, de un único
material, y flexionada dentro del período elástico, por acción de la carga P. El ángulo β define la
curvatura de la deformación de la viga y el mismo (en radianes) resulta dado por:
donde:
P = Carga actuante
L = Longitud de la viga
E = Módulo de elasticidad longitudinal del material de la viga
Je = Momento areolar ecuatorial de segundo orden de la sección transversal de la viga respecto
al plano neutro
Por otra parte:
donde:
We = Módulo resistente ecuatorial de la viga
Sfe = Tensión normal de falla.
h = Distancia entre la fibra más alejada y el plano neutro
luego:
Dependiendo h del tamaño de la sección transversal de la correa, resulta, con el aumento de la
sección, un menor ángulo β admisible y en consecuencia menor curvatura admisible de la correa y un
mayor radio mínimo para las poleas.
Con las TABLAS del fabricante del motor y poleas y respetando ambas simultáneamente, se determina
el radio primitivo MÍNIMO recomendado para la polea PEQUEÑA, entrando con sus potencia de
servicio en Kw y pulsación (velocidad angular) en rad / seg y con la sección de correa determinada en
el paso anterior.
El radio que se obtiene es el primitivo, siendo este el que surge de considerar ω1 * Rp1 = ω2 * Rp2 y
sobre dichos radios resulta la llamada longitud primitiva de la correa.
146,1
Radio minimo en motores eléctricos
241,3
Radio minimo conforme correa:
9,5 pulg =
241,3
Radio polea pequeña
Rp1 =
mm
mm
mm
En la tabla 3 siguiente tenemos para la seccion adoptada , el diametro minimo recomendado por le
fabricante de correas y demas datos para su dimensionamiento
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 3
04º Paso: Radio primitivo, velocidades rotación (frecuencia) y angular polea mayor radio
(conducida).
Los radios primitivos y velocidades rotacionales / angulares de ambas poleas resultan relacionados
entre sí por la relación de transmisión, luego:
Rp2 = Rp1 * m
ω2 = ω1 / m
Diámetro polea pequeña
Radio polea conducida
Diámetro polea conducida
Velocidad angular polea conducida
Dp1 =
Rp2 =
Dp2 =
w2 =
483
965,2
1930
19,5
mm
mm
mm
rad/seg =
186
rpm
05º Paso: Verificación del límite de velocidad
Según Pirelli (otra compañía fabricante de correas), la velocidad de este tipo de correas no debe
sobrepasar los 30 m / seg (posiblemente para no llegar al efecto conocido como “resonancia” como así
también por pérdida de adherencia entre correa y polea por efecto centrifugo), por lo que dicha
condición será verificada:
Velocidad tangencial poleas
Vt ≤
Vt =
30
m/seg
18,8 m/seg
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
¿Es Vt menor que 30 m/seg?:
CHOQUE RAUL
HOJA: 4
SI
06º Paso: Elección de la distancia C entre los centros (ejes de rotación) de ambas poleas
Las longitudes de las correas de sección trapezoidal, atendiendo a que estas resultan cerradas sobre si
mismas, se encuentran estandarizadas y dependen también de los radios de ambas poleas como así
también de la distancia entre los centros (ejes de rotación) de las mismas.
Corresponde entonces adoptar una distancia entre centros, calcular la longitud de correa necesaria,
adoptar una estándar y modificar o no según resulte, la distancia entre centros originalmente prevista.
Con relaciones de transmisión cercanas a la unidad, se pueden lograr ángulos de contacto
apreciablemente grandes con distancias entre centros relativamente pequeñas; no sucediendo lo
mismo con relaciones de transmisión alejadas de la unidad: en las mismas será necesario sacrificar
arco de contacto con el objeto de reducir la distancia entre los centros de las poleas.
Basándose en obtener un arco de contacto mayor a 96º en la polea PEQUEÑA (resultando la misma la
que arroja el menor valor para dicha variable) y una separación mínima entre las periferias de las
circunferencias primitivas de ambas poleas mayor al semiradio de la polea pequeña, resultan las
líneas rectas limites inferiores que muestra el siguiente diagrama.
Trazada en dicho diagrama una recta limite superior, la elección de la distancia entre centros
(relacionada al radio primitivo de la polea pequeña) deberá obtenerse de la zona delimitada por las
rectas límite inferior y superior aproximadamente en el punto medio de la zona y conforme es la
relación de transmisión.
maximo
minimo
Distancia entre centros MÍNIMA (mm) =
Distancia entre centros MÁXIMA (mm) =
C/Rp1=
Distancia entre centros C imputada (mm)
1303 : Rp1*(C/Rp1)min
1593
min
6
C/Rp1 5,4
1448 : Rp1*(C/Rp1) medio
¿Es imputación entre centros mayor que MÍNIMA =
¿Es imputación entre centros menor que MÁXIMA =
max
6,6
medio
6
SI
SI
07º Paso: Longitud necesaria de correa.
Adoptada la distancia entre centros de poleas, el cálculo de la longitud necesaria de correa se deduce
del análisis del siguiente esquema, donde:
Rp1 = Radio primitivo polea pequeña
Rp2 = Radio primitivo polea grande
Lp1 = Longitud del tramo primitivo de correa en contacto con la polea pequeña
Lp2 = Longitud del tramo primitivo de correa en contacto con la polea grande
Lpt = Longitud de cada uno de los 2 tramos de correa comprendido por los puntos de tangencia
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 5
de la correa con ambas poleas
Lp = Longitud primitiva total de la correa
θr = Ángulo θ en radianes
resulta: Lp = Lp1 + Lp2 + 2 * Lpt
Lp1 = Rp1 * (Nº π -- 2 * θr)
;
Lp2 = Rp2 * (Nº π + 2 * θr)
Lpt = C * cos (θ)
Operando y agrupando, resulta:
Lp = 2 * C * cos (θ) + Nº π * [Rp2 + Rp1] + 2 * θr * (Rp2 -- Rp1)
θ=
θ=
α1 =
¿Es α1 > 95º?
Longitud
Longitud
Longitud
Longitud
tramo recto correa
correa motora
correa conducida
correa de cálculo
Lpt=
Lp1 =
Lp2 =
Lp =
0,5236 radianes
30 grados sexagesimales
120 grados sexagesimales
SI
1253,8
505,38
4043
7056
mm
mm
mm
mm;; (2*Lpt+Lp1+Lp2)
7056 mm
08º Paso: Adopción longitud estándar de correa
Se debe ahora, sobre la base de la longitud calculada en el paso anterior y conforme la sección de
correa resultante, adoptar una correa de longitud estándar inmediatamente mayor a la calculada.
La adopción de una longitud menor a la calculada, disminuye el ángulo de contacto original y la
distancia entre los centros (ejes de rotación) de ambas poleas y una longitud mayor aumenta dichos
valores.
Las longitudes estandar y en mm se encuentran en la TABLA 02 adjunta para cada sección de correa
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 6
Designación Correa:
Sección de correa: D
Longitud primitiva de correa,
Lp =
301 pulg=
7645 mm
09º Paso: Recálculo de la distancia entre centros.
Con la longitud adoptada, sé recalcula la distancia entre centros de poleas, utilizando las siguientes
expresiones, recomendadas por los fabricantes de correas o bien iteratuando con las anteriores (07º
paso):
con: b = 4 *Lp -- Nº π * 2 * (Dp2 + Dp1)
Nota 01:
Sí Lp adoptada > Lp necesaria; C recalculada > C adoptada
Sí Lp adoptada < Lp necesaria; C recalculada < C adoptada
Factor b (mm) =
b=
15420 mm
Distancia entre centros resultante
C=
1780 mm
Diferencia porcentual distancia entre centros C =
23,0
(Cadoptado-Ccalculado)*100
Ccalculado
10º Paso: Ángulo de contacto entre correa y polea pequeña
Siendo:
α1r = Ángulo de contacto entre correa y polea motora, en radianes
α1º = Ángulo de contacto entre correa y polea motora, en grados sexagesimales
Con: 01)
02) C correspondiente a la longitud de correa adoptada
resulta:
Ángulo ALFA1 polea motora
Ángulo ALFA1 polea motora =
¿Es ALFA1 mayor que 95º?:
2,3041 radianes
132,02 grados sexagesimales
SI
11º Paso: Capacidad de transmisión de potencia por correa
Con la sección de correa adoptada, la velocidad angular (pulsación) y el radio de la polea PEQUEÑA en
las TABLAS 09 adjuntas se obtiene la capacidad básica de transmisión de potencia N’ por correa.
Dichas capacidades corresponden a relaciones de transmisión m = 1, esto es, ambas poleas iguales.
Estas relaciones de transmisión implican arrollamientos de la correa sobre ambas poleas, de valor
180º y un cierto valor de carga de arrollamiento o de flexión; si el ángulo de arrollamiento es menor a
180º (polea pequeña), la carga de arrollamiento resulta menor, por lo que la correa puede transmitir
mayor potencia. Este incremento ΔN de potencia para relaciones de transmisión distintas a 1, se
obtienen en las TABLAS 09 adjuntas, conforme es la sección de correa a utilizar y en donde deberá
entrarse con la relación de transmisión m y la velocidad angular (pulsación) de la polea pequeña en
rev / min.
La capacidad de transmisión de potencia, y por correa, será entonces:
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
UTN - UARG
CHOQUE RAUL
HOJA: 7
Nb = N’ + ΔN
TABLA 10. SECCION "E"- CAPACIDAD BASICA EN HP POR CORREA
Polea pequeña con diametro primitivo
(pulgadas)
interpolacion
hp basico
32,2
N´
33,1
rpm
700
743
750
hp adicional
5,82
32,97 hp
x
6,23
N´ =
Capacidad básica por correa N' (Kw) =
Incremento ∆N (Kw) por correa =
Nb =
rpm
700
743
750
∆N =
6,17
hp
24,599 kw
4,605 kw
29,2 kw
12º Paso: Corrección de potencia por arco de contacto
La potencia transmisible es función del arco de contacto (a mayor arco, mayor pendiente de la recta de
fricción y mayor potencia transmisible), de ahí que Nb disminuirá de valor si el arco de contacto es
menor a 180º.
Los coeficiente Ac respectivos han sido tablados por los fabricantes de correas, haciéndolos función de
(Dp2 – Dp1) y C conforme indica la TABLA 11(siguiente pagina) adjunta.
Luego:
Nbα = Nb * Ac
diferencia entre diametros de poleas= Dp2 - Dp1 =
57
distancia entre centros,
C=
70,1
interpolacion
DIFER 54
DIFER 60
0,87
70
70
0,86
0,8702
X
70,1
70,1
Y
pulg
pulg
0,8602
0,89
80
80
0,88
Factor Ac de arco de contacto
(ver tabla 11, siguiente pagina)
Nba =
0,865
25,3 kw
54
C = 70,1
0,8702
57
Ac =
60
0,8602
0,8652
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 8
13º Paso: Corrección de potencia por longitud de correa
Los dos esquemas anteriores, representan, uno, una transmisión con una correa ‘corta’ y el otro, la
misma transmisión pero con una correa ‘larga’. En los puntos A y B, la correa debe flexionar,
cambiando el estado de tensiones (en su contacto con las poleas, soporta cargas de flexión mientras
en la zona de no contacto, está solamente traccionada) y la frecuencia con que procede a cambiar de
estado tensional es de mayor valor en el caso de la correa corta que en el de la larga como que así
también la correa larga posee mayor tiempo para disipar el calor por rozamiento que la correa absorbe
en su contacto con la polea. Atendiendo a estas situaciones, resulta que las correas largas pueden
transmitir mayor potencia que las cortas (conclusión: mandos cortos desgastan las correas más
rápidamente que los mandos con distancias entre centros mayores y por esta razón cada largo debe
tener una capacidad distinta). Los factores correspondientes se encuentran tablados en la TABLA 13
adjunta y son función de la sección transversal y de la longitud de la correa. Siendo Lc dicho factor,
resulta:
Nbαl = Nbα * Lc = (N’ + ΔN) * Ac * Lc
Factor de longitud,
Potencia final por correa
Lc =
Nbal =
1,01
25,5
kw
Nota: No por transmitir una correa larga mayor potencia que una corta, las correas largas convienen más que las cortas. Con las
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 9
correas muy largas ocurren ondulaciones del tramo conducido, provocándose vibraciones en el sistema y en los ejes de las poleas.
14º Paso: Número de correas
El número de correas resultará de hacer el cociente entre la potencia de selección / servicio Ns y la
potencia transmisible Nbαl por cada una de ellas y de adoptar el inmediato superior entero al cociente
resultante.
Se adoptará Qs ≤ 6 a efectos de no ‘diseñar’ poleas de demasiado espesor. Las poleas, al menos las que
van montadas en los motores, suelen trabajar en voladizo por que así resulta dispuesta la punta de eje
del motor, pudiéndose ocasionar altas cargas de flexión sobre la misma. Resulta además que correas
de una misma longitud nominal no tienen la misma longitud real, por lo que cada una de ellas trabaja
a distinta tensión (las correas, en realidad, se identifican con tres códigos, uno corresponde al tamaño
de la sección, otro a la longitud nominal y el tercero a la “partida” de fabricación, por lo que
corresponde montar correas de una misma partida. Cuando se trata de un recambio, resulta
aconsejable cambiar todas y no solamente las más “estiradas”, verificando que las nuevas sean de una
misma partida).
A efectos de disminuir la cantidad de correas, corresponde:
A) Aumentar la distancia entre centros (efecto ‘disminutivo’ menor)
B) Aumentar los radios de las poleas (efecto ‘disminutivo’ “medio”)
C) Adoptar una sección transversal mayor (efecto ‘disminutivo’ mayor)
Cantidad de correas =
161,52 kw
25,5 kw
=
6
= Qs
15º Paso: Cálculo de la carga tangencial máxima Ptmx a transmitir por la totalidad de las
correas
Para calcular el valor de la carga tangencial Ptmx, se usará como potencia a transmitir el valor de la
potencia de selección / servicio Ns, pudiéndose así sortear las sobrecargas que se puedan presentar.
Conforme lo visto resulta, cualquiera sea la polea que se considere:
Pt2 = Pt1
Siendo: 1 watt = 1 N.m / seg ;; 1 Kwatt = 1000 watt
Fuerza tangencial máx lado polea =
Ptmx = 8602,7 N
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 10
16º Paso: Cálculo de las pendientes de las rectas de fricción a fricción máxima posible para
ambas poleas
Los catálogos de correas especifican los ángulos de canal de las poleas para distintos radios de las
mismas (ver TABLA 03 adjunta) tal que a mayor radio mayor ángulo (γ es de 36º para las poleas mas
pequeñas y de 38º para las mas grandes); en función de que en una transmisión con poleas de
distinto radio, la polea grande trabaja con un ángulo de contacto mayor. Luego, dicha polea y a un
mismo material que la polea pequeña (misma fricción), puede trabajar con un ángulo de canal mayor a
efectos de acuñar ‘menos’ la correa y así otorgar una vida útil mayor a la misma por menor
compresión transversal.
Debiéndose resolver infinidad de casos con poleas ‘estandar’, la solución a todos los casos no resulta
posible y consecuentemente se puede esperar que no sea la polea pequeña la que ofrezca la menor
pendiente de la recta de fricción, razón por la cual se debe proceder al cálculo de las pendientes de las
rectas de fricción para ambas poleas (con un mismo μ supuestas ambas poleas del mismo material y de
la misma calidad de fabricación ) y adoptar la menor por requerir mayor esfuerzo de montura y así
asegurar que la potencia puesta en juego se pueda transmitir.
Ángulo de canal polea motora:
Ángulo de canal polea conducida:
Luego y con un valor de
γ1 =
γ2 =
36
36
°
°
μ = 0,2
=
=
0,628
0,628
rad
rad
(imputado, entre Fe y caucho)
ver anexo1correas
Coeficiente fricción y acuñamiento motor :
Coef. fricción y acuñamiento conducido :
µa1 =
µa2 =
0,401
0,401
Atención: arc sen ((Rp2 -- Rp1) / C), α1 y α2 deben aplicarse en RADIANES
Ángulo polea motora :
Áng. polea conducida :
α1 =
α2 =
2,30 radianes
=
132 °
3,98 radianes
=
228 °
Pendiente recta de fricción máxima polea motora = e^(μa1 * α1r)
2,52
Pendiente recta de fricción máxima polea conducida = e^(μa2 * α2r)
4,92
(valor minimo entre motora y conducida)
Pendiente recta de fricción resultante =
2,52
Luego y si con e ^ (μacr * αcrr) = pendiente de la recta de fricción a utilizar (polea crítica):
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
Identificación Polea Crítica:
MOTORA
CHOQUE RAUL
HOJA: 11
(polea con menor coeficiente de friccion)
17º Paso: Cálculo del esfuerzo mínimo T2mn en el ramal conducido (carga máxima Ptmx).
con el valor de e ^ (μacr * αcrr) resultante de la distinción del paso anterior
T2mn = 5670,8 Newton
18º Paso: Cálculo de los esfuerzos T1mx en el ramal motor de la correa y de montura T0mn
correspondientes a Ptmx y T2mn
Existiendo dos expresiones para el cálculo de T1mx, este valor se calculará con las dos a modo de
verificación:
T1mx = Ptmx + T2mn
T1mx = T2mn * e ^ (μacr * αcrr)
Esfuerzo T1mx motor máximo en Newton =
14273 Newton
T1mx =
14273 Newton
Esfuerzo Tomn de montura mínimo en Newton =
Tomn=
calculado con la primer formula
calculado con la segunda formula
9972 Newton
19º Paso: Cálculo de la fricción con que trabajan las poleas.
Habiéndose definido en el 16º Paso la polea que ofrece el menor valor de la pendiente de la recta de
fricción y habiendo definido el valor correspondiente con e^(μacr* αcrr), corresponde a los efectos del
próximo paso, calcular la fricción con que trabaja la otra polea:
Si polea crítica = polea 1 → fa1 = μa1
;;;;;
ver anexo 2 correas
Fricción y acuñamiento polea motora:
Si polea crítica = polea 2
→
fa2 = μa2
Fricción y acuñamiento polea conducida:
fa1 = 0,4006
;;;;;
fa2 =
0,232
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 12
20º Paso: Cálculo de las cargas flexionantes Qy y Qx actuantes sobre los ejes de ambas poleas,
conforme T1mx y T2mn
Con los valores de α1 y α2 calculados en el 16º Paso, se tiene:
=
Tiro
Tiro
Qy = (T1mx + T2mn) * cos(θ) =
Qx = (T1mx – T2mn) * sen(θ) =
0,42 radianes
Qy =
Qx =
18221,1
3497,9
Newton
Newton
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
UTN - UARG
CHOQUE RAUL
HOJA: 13
21º Paso: Trazado del diagrama de esfuerzos.
En un diagrama cartesiano T1 / Ptmx - T2 se trazarán:
A) La recta T1 = T2 y la recta de fricción T1 = T2 * e^(μacr,αcrr)
B) La recta T1 = Ptmx + T2 y la recta T1 = 2 * T0mn – T2
se resaltará el segmento de funcionamiento AFmx y se marcarán los valores
Ptmx, T1mx, T2mn, T0mn y 2 * T0mn, estos dos últimos sobre ambos ejes.
Ptmx
Tomn
T1mx
T2mn
=
=
=
=
8603
9972
14273
5671
Newton
Newton
Newton
Newton
; Fb = 1,5 . (T1 - T2) =
12904,01 Newton
1315 kg
Comprobacion por formula de faires
Mt =
71620 ⋅ Ns(CV )
=
n(rpm)
84651 kg.cm
Fuerza de flexion sobre el arbol
Fb = (T1 + T2 ) = C⋅ (T1 − T2 ) = 1,5 ⋅
Mt
=
r
1315,5 kg
valor muy proximo al calculado en el
paso anterior
22º Paso: Dibujo esquemático a escala de la instalación, de la sección transversal de la correa y
de la llanta de la polea PEQUEÑA.
C=
1780 mm
Rp1 =
241 mm
Rp2 =
965 mm
alpha1 =
2,30 rad
=
132 °
alpha2 =
3,98 rad
=
228 °
23º Paso: Cálculo de los esfuerzos medio Tm y alternativo Tamx de transmisión de potencia.
Esfuerzo medio Tm en Newton =
Esfuerzo alternativo Ta en Newton =
9972,1
4301,3
24º Paso: Trazado de un diagrama esfuerzo T - tiempo para un ciclo de trabajo de una sección
cualquiera de la correa
Cualquier sección transversal de la correa, al describir ‘una vuelta’, describe un ciclo de trabajo
‘viendo’ variar los esfuerzos a los cuales se encuentra sometida.
Para el trazado de un diagrama T - Tiempo de un ciclo de trabajo que denote tal situación, resultando
necesario calcular:
=
0,42 radianes
y resultando que en:
A) Desde que sale de la polea conducida y hasta que entra en la polea motora, esta sometida al
UTN - UARG
CALCULO DE POLEA Y CORREA
TP Transmision de potencia mecanica a un molino bolas
CHOQUE RAUL
HOJA: 14
esfuerzo T1 y resulta de aplicación:
Lpt = C * cos (θ)
Tramo recto Lpt recorrido por la correa en metros =
1,6266
(tt) Tiempo insumido por la correa en recorrer cada tramo recto:
=
0,087 seg
B) Mientras recorre la polea motora ve disminuir el esfuerzo por transmisión de potencia, de T1 a
T2 y resulta de aplicación:
Lp1 = Rp1 * (Nº π -- 2 * θr)
Tramo motor Lp1 recorrido por la correa en metros =
(t1) Tiempo insumido por la correa en recorrer la polea motora:
0,56
0,030
=
seg
C) Desde que sale de la polea motora y hasta que entra en la polea conducida, esta sometida al
esfuerzo T2 y resulta de aplicación:
Lpt = C * cos (θ)
1,6266
0,087
=
seg
D) Mientras recorre la polea conducida ve aumentar el esfuerzo por transmisión de potencia de
T2 a T1 y resulta de aplicación:
Lp2 = Rp2 * (Nº π + 2 * θr)
Tramo conducido Lp2 recorrido por la correa en metros =
3,84
=
Tiempo Total = t1 + t2 + 2 * tt
=
seg
0,205
0,407 seg
=
2,5 v.p.seg
147,3 v.p.min
UTN - UARG
DIMENSIONES DE POLEAS
CHOQUE RAUL
TP TRANSMSION DE POTENCIA MECANICA A UN MOLINO DE BOLAS
DISEÑO DE POLEA
Se dimensionara según lo recomendado por Goodyear
TABLA 3, RANURAS NORMALES
seccion de
Diam. Primitivo (pulg)
min.recome
correa
ndado
E
21
angulo
W
D
X
S
ranura
(pugadas)
(pulgadas)
(pulgadas)
(pulgadas)
36
1,527
1,3
0,4
1 + 3/4
E (pulgadas)
rango
18 a 24
1+1/8
datos:
C en mm =
1780 distancia entre centros
Rp1 en mm =
241,3
Dp1=
482,6
Rp2 en mm =
965,2
Dp2=
1930,4
alpha1 =
2,30 radianes
alpha2 =
3,98 radianes
D: profundidad de canal :
1,3
pulg
33,02
1) Ancho de poleas
ancho de polea:
S*(N-1)+2*E
donde
S: centro entre canaletas:
1 1/4 pulg
44,45
N: numero de ranuras:
6
E: ancho de salida, :
1 1/8 pulg
28,575
medido desde borde al centro de la ranura contigua
W:
1,527 pulg
38,79
ancho de polea=
279,4 mm
mm
mm
polea motora
polea conducida
mm
mm
mm
11 pulg
2) Dimensiones de polea motora
Dexterior1 = Dp1 + 2 * X =
donde, X:
0,4 pulg
10,16 mm
D1 =
502,92
mm
19,8 pulg
1950,72 mm
76,8 pulg
3) Dimensiones de polea conducida
Dexterior2 = Dp2 + 2 * X =
D2=
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
INTRODUCCION AL CÁLCULO DEL ARBOL DE POTENCIA
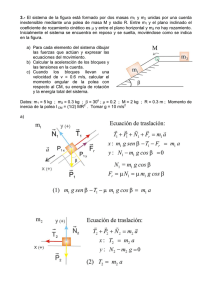
El esquema de la FIGURA 01 representa un árbol transmisor de potencia mecánica sustentado por dos
rodamientos, uno radial rígido de bolas y otro radial a rodillos cilíndricos sin pestaña actuando los
mismos como vínculos del árbol en análisis, estándole permitido a este de esta manera, rotar alrededor
de su propio eje.
El rodamiento rígido de bolas se constituye así y conforme su configuración, en el soporte fijo del
árbol y el rodamiento a rodillos cilíndricos, en el móvil, dada la posibilidad de desplazamiento axial
relativo que poseen sus aros interior y exterior entre sí. Atendiendo a estas circunstancias y a los
relativamente pequeños espesores de los rodamientos, el árbol será tratado como una viga
isostáticamente sustentada y como aproximación a sus dimensiones finales.
Montadas la polea CONDUCIDA del calculo de correas y una rueda dentada sobre el árbol, cuando
existe transmisión de potencia en el sistema, la polea funciona como elemento motor de la rueda
dentada, ‘entrando’ así al árbol potencia por la polea y ‘saliendo’ la ‘misma’ potencia por la rueda
dentada. Resulta así un árbol intermediario de transmisión de potencia, recibiendo de una máquina
‘motora’ y entregando a una máquina ‘útil’, directa o indirectamente y elementos ambos externos al
sistema en estudio, la potencia puesta en juego y que circula por el mismo.
Tanto la polea como la rueda dentada, las mismas pueden solidarizarse al árbol mediante chavetas, las
cuales, poseyendo geometría prismática, ocupan el espacio que se obtiene de la realización de sendas
ranuras longitudinales de sección rectangular, tanto en los taladros (agujeros) de la polea y de la rueda
dentada, como en las secciones correspondientes del árbol.
Resulta así ‘asegurada’ la rotación conjunta de los cinco elementos puestos en juego, esto es, el árbol,
la polea, la rueda dentada y las dos chavetas (una para la polea y otra para la rueda dentada), y hasta
un determinado valor de ‘potencia’ conforme es la velocidad, los valores de las dimensiones
transversales del árbol y longitudinales de las chavetas y de las propiedades de los materiales
correspondientes.
Siendo las secciones transversales de los rodamientos de forma circular, las secciones correspondientes
del árbol seguirán la misma geometría, esto es, circular; por otra parte también resulta conveniente
dicha geometría en el resto del árbol, en función de resultar la misma de parámetros uniformes frente a
la torsión que se manifiesta entre la polea y la rueda dentada por la potencia en transmisión,
atendiendo a la expresión:
Supuesta una distribución lineal para el momento torsor a lo largo de los espesores de la rueda dentada
y del cubo, manchón o maza de la polea, resulta el diagrama siguiente para el momento torsor.
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Siendo el problema, el dimensionamiento resistencial del árbol, corresponde tratar previamente los
datos correspondientes:
01) Polea:
Polea conducida dimensiones anteriormente calculadas en correas.
Material: Hierro Fundido.
Peso específico: 77 N / dm3.
02) Potencia: Potencia de selección calculo de correas.
03) Velocidad angular: Velocidad angular polea CONDUCIDA calculo de correas.
04) Rueda dentada:
Dentado: recto.
Ángulo de presión circunferencial: 20º.
Diámetro primitivo: ver cálculo de engranajes.
Espesor: ver cálculo de engranajes.
Material: Acero 4140.
Peso específico: 77 N / dm3.
05) Árbol:
Material: Acero C 1050 (0,50 % de carbono). Laminado en caliente.
Tratamiento térmico: recocido.
Maquinado: torneado en secciones 2), 3), 4), 6) y 7) y rectificado en secciones 1) y 5).
Peso específico: 77 N / dm3.
06) Vida estadística mínima pretendida para ambos rodamientos (condiciones normales de
funcionamiento): 20.000 horas
07) Rodamiento radial a bolas: Actúa como apoyo fijo del árbol, absorbiendo esfuerzos radiales
(reacción de vínculo).
08) Rodamiento radial a rodillos cilíndricos sin pestaña: Vínculo móvil. Absorbe exclusivamente
esfuerzos radiales (reacción de vínculo) dada la posibilidad de desplazamientos axiales de uno de los
dos aros respecto al otro.
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Análisis de las fuerzas que actúan en las ruedas dentadas
Las FIGURAS 04 y 05 siguientes muestran simbólicamente dos ruedas dentadas en contacto a través de
sus circunferencias primitivas.
Siendo la rueda 1) motora de la 2) (esta última conducida por la 1)) y al igual que con las poleas, la
relación de los diámetros o radios primitivos que verifican ambas ruedas, hace a la relación de las
velocidades angulares como a la de los momentos torsores.
Suponiendo perdidas de potencia nulas, resulta:
Siendo que en esta situación el momento torsor resulta del producto de una fuerza tangencial por el
RADIO de la circunferencia a la cual es tangente, se tiene:
Trasladadas las fuerzas tangenciales Ft1-2 (fuerza tangencial con que actúa la rueda motora 1 sobre la
conducida 2) y Ft2-1 (fuerza tangencial con que la rueda conducida 2 se opone al movimiento y actuante
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
sobre la 1) a los respectivos centros de las circunferencias primitivas, como muestra la FIGURA 05 y
haciendo Ft = Ft1-2 = Ft2-1, resultan:
a) El momento torsor Mt correspondiente, dado por la fuerza Ft tangente a la circunferencia
primitiva y la -Ft aplicada en el eje de rotación respectivo.
b) La fuerza Ft aplicada en el centro de rotación y que flexiona el árbol.
Aparecen en el esquema también las fuerzas radiales Fr1-2 y Fr2-1, como así también una recta de
presión, siendo αpc el ángulo de presión circunferencial que forma dicha recta con la tangente común
a ambas circunferencias primitivas. Resulta que las fuerzas radiales tienden a separar las ruedas
dentadas y que la dirección de la recta de presión queda determinada por quien de las ruedas dentadas
es la motora y / o la conducida y por el sentido de rotación de cualquiera de ellas o ‘del par’.
Del esquema se deduce que la disposición relativa que las ruedas dentadas guardan entre sí y el
sentido de rotación ‘del par’, determinan la dirección y sentido de las cargas flexionantes Ft y Fr, que
las fuerzas radiales flexionan a los árboles en planos a 90º de los planos de flexión correspondientes a
las fuerzas tangenciales y que sus valores relativos resultan de:
La composición de las fuerzas tangenciales y radiales resulta en la fuerza Fn, de la dirección de la recta
de presión y que como no pudiendo ser de otra manera, resulta: Fn1-2 = Fn2-1
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
PROCEDIMIENTO de DIMENSIONAMIENTO y de VERIFICACIÓN
Paso 01): Trazado de un esquema perspectivado, PLANO 01, del sistema fijando la dirección βc de tiro
Q del conjunto del calculo de correas, definiendo la ubicación relativa (ángulo βe) de las ruedas
dentadas entre sí, RESPETANDO EL SENTIDO DE ROTACIÓN PUESTO EN LA MISMA FIGURA.
Los valores (βc y βe) se fijaran arbitrariamente, exponiendo los mismos y condicionando los mismos a
βc ± βe ≠ 0º, 90º, 180º, 270º, 360º.
Definidos los parámetros antes mencionados, en el mismo esquema se trazan las fuerzas que flexionan
el árbol como en el mismo PLANO se muestra.
N - Potencia actuante =
ω - Pulsación (vel. angular) =
Rueda dentada
134,6
Kw
19,5
rad / seg
αpc - Ángulo presión circ. =
20
Dp - Diametro Primitivo =
320
mm
b - Espesor =
110
mm
γ - Peso específico del acero =
77
N/dm3
300
mm
C - Distancia entre elementos = Equidistantes entre si, =
βc - Ángulo tiro correas con eje X =
βe - Ángulo tiro engranes con eje X =
Verificación - βc ± βe ≠ n*90°
Grados sex.
15
Grados sex.
225
Grados sex.
SI
Paso 02): Especificación de los ‘tiros’ Qy y Qx del calculo de correas. Estas fuerzas Qy y Qx flexionan
el árbol, conforme sea la potencia transmitida y en todo instante, aun sin rotación alguna y
consecuentemente sin transmisión de potencia.
Qy - Tiro polea conducida =
18226,60
Newtons
Qx - Tiro polea conducida =
3498,90
Newtons
Paso 03): Cálculo de las componentes horizontal Qh y vertical Qv de Qy y de Qx como resultado de
ambas:
Conveniendo trabajar con componentes horizontales y verticales (los pesos de la polea y de la rueda
dentada actuan verticalmente), resulta:
La siguiente FIGURA muestra el sentido de rotación para una transmisión por correas. Conforme es el
sentido de rotación, es la ubicación de los ramales motor T1 y conducido T2 de la correa y el sentido de
la fuerza Qx, flexionante la misma al igual que Qy del árbol en estudio y las expresiones para el cálculo
de Qh y de Qv, de ahí que resulta necesario que se respete el sentido de rotación de la FIGURA, en
función de que las expresiones dadas resultan para dicho sentido de rotación.
Qh - Componente horizontal del tiro de las correas =
Qv - Componente vertical del tiro de las correas =
18511,1
Newtons
1337,7
Newtons
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Paso 04): Cálculo del peso de la polea y de la rueda dentada montadas en el árbol.
De la siguiente tabla se obtiene el peso de la polea (la montada en el árbol, la conducida del calculo de
correas) según sea sus diámetro primitivo y ancho de llanta.
Siendo que el peso en tratamiento resulta función cuadrática del diámetro y función lineal del ancho de
llanta, corresponde interpolar considerando el cuadrado del diámetro y el ancho de llanta.
Peso Poleas de Fundición de Hierro, en N (Newton)
Diámetro
en mm
1000
1250
1600
2000
2500
70
100
480
700
140
600
900
1900
Ancho de Llanta en mm
200
260
350
830
950
2000
1250
1500
2800
2250
2600
4100
3050
3800
5900
4800
5800
8900
450
2450
3400
4900
7150
10800
600
13700
Referencia: Manual Hütte del Ingeniero, 2da. edición en castellano, Tomo II, Página 316
Para el cálculo del peso de la rueda dentada se cubicará la misma con su diámetro primitivo (el mismo
interviene cuadráticamente) y su espesor, multiplicando el volumen obtenido por el peso específico
correspondiente (77 N / dm3). Esta manera de operar no excluye el peso correspondiente a su taladro
(agujero) central; la desestimación de esta cuestión no aumenta la resistencia del árbol. Al no
considerarse el peso del árbol (podría dársele un valor y repartirlo entre la polea, la rueda dentada y los
vínculos), la parte correspondiente a su vínculo con la rueda dentada queda incluida.
Polea Conducida
Dp2 - Diametro Primitivo =
1930
mm
b2 - ancho de llanta, Espesor =
279
mm
4000
Newtons
681
Newtons
- Peso de la polea conducida = interpolacion de la tb anterior Gp =
- Peso rueda dentada = π *
(Dp2/4)
* b * γ/1000 =
Grd =
Paso 05): Cálculo del momento torsor Mt solicitante.
Con la potencia (máxima) N puesta en juego y la velocidad angular ω o rotacional n del árbol (la de la
POLEA CONDUCIDA), se calcula el momento torsor máximo que solicita al árbol:
- Momento Torsor Actuante
Mt =
6903
N.m
Paso 06): Cálculo de las fuerzas Ft y Fr correspondientes a la rueda dentada y que flexionan el árbol en
planos a 90º entre sí y de sus sumas horizontal Fh y vertical Fv.
Donde
Rp1 / Dp1 son los radio / diámetro primitivo de la rueda dentada que va montada en el árbol
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
- Fuerza Tangencial en rueda dentada
CHOQUE RAUL
HOJA:
Ft =
43140
Newtons
- Fuerza Radial en rueda dentada Fr =
15702
Newtons
- Componente horizontal de Ft+Fr =
Fh =
41608
Newtons
- Componente vertical de Ft+Fr =
Fv =
-19402
Newtons
Paso 07): Trazado del esquema de cargas actuantes y reacciones de vínculo en el en el plano horizontal
y cálculo de las reacciones de vínculo RAh y RBh en el mismo plano, indicando en el esquema sentido y
valor de las cargas totales y reacciones de vínculo.
Con las cargas horizontales Qh y Fh (cada una con su respectivo signo) se calculan / verifican y
operando con detalle, las reacciones de vínculo correspondientes con las siguientes ecuaciones:
Σ MfAh = Sumatoria de momentos flectores respecto al vínculo A = 0
Σ MfBh = Sumatoria de momentos flectores respecto al vínculo B = 0
Σ Fh = Sumatoria de fuerzas actuantes y reacciones horizontales = 0
Si bien dos ecuaciones resultan suficientes, la tercera será utilizada a efectos verificar los valores
obtenidos con las otras dos.
- Reacción de vínculo horizontal cojinete extremo Rah =
-11549
Newtons
- Reacción de vínculo horizontal cojinete medio
-48571
Newtons
Rbh =
Verificación
0,000
Paso 08): Trazado del esquema de cargas actuantes y reacciones de vínculo en el en el plano vertical y
cálculo de las reacciones de vínculo RAv y RBv en el mismo plano, indicando en el esquema sentido y
valor de las cargas totales y reacciones de vínculo.
Siendo Gp = Peso de la polea y Grd = Peso de la rueda dentada; con las cargas verticales, Qv, Fv, Gp y
Grd (cada una con su respectivo signo, pesos Gp y Grd positivos) se calculan / verifican y operando con
detalle, las reacciones de vínculo con las siguientes ecuaciones:
Σ MfAv = Sumatoria de momentos flectores respecto al vínculo A = 0
Σ MfBv = Sumatoria de momentos flectores respecto al vínculo B = 0
Σ Fv = Sumatoria de fuerzas actuantes y reacciones verticales = 0
Si bien dos ecuaciones resultan suficientes, la tercera será utilizada a efectos verificar los valores
obtenidos con las otras dos
- Reacción de vínculo vertical cojinete extremo
Rav =
12029
Newtons
- Reacción de vínculo vertical cojinete medio
Rbv =
1354
Newtons
Verificación
0,000
Paso 09): Trazado de los diagramas de momentos flectores en los planos horizontal y vertical; del
módulo de los momentos flectores resultantes y del momento torsor Considerando aplicación puntual
de las cargas y de las reacciones de vínculo, tanto en el plano horizontal como en el vertical, los
diagramas de momentos flectores resultan ser lineales entre cargas, de donde entonces basta con
calcular los momentos flectores y operando por ‘plano’, en los puntos de aplicación de cargas y de
reacciones de vínculo.
Siendo que sección a sección, resulta posible cambios de valor en la relación entre momento flector
horizontal y vertical; sólo es posible representar en el plano, el módulo del momento flector resultante
que de dicha manera resulta siempre positivo. No teniendo incidencia aparente la dirección del
momento flector resultante, que por otra parte resulta de variación continua (téngase en cuenta además
que las cargas y reacciones de vínculo resultan ser distribuidas), se considerará entonces solamente su
módulo:
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Mfr = ( Mfh2 + Mfv2 )1/2
NOTA: El MOMENTO TORSOR entre los ‘bordes o laterales’ del cubo de la polea y de la rueda dentada,
será trazado con DISTRIBUCIÓN LINEAL a lo largo del ancho o espesor de dichos elementos.
OTRA: Donde Mfh y / o Mfv resulta nulo, Mfr resulta Mfv y / o Mfh respectivamente. Tal / es situación
/ es (cero, una o dos), se presenta / n entre D3 y D5, resultando además una función cuadrática para
el momento flector resultante entre D3 y D5, de menor valor que una función lineal, ‘quebrada’ la
misma donde las componentes del momento flector resultante puedan resultar nulas. En tal caso y a
efectos simplificar el trabajo, se supondrá una función lineal ‘quebrada’ o no conforme el caso.
Newtons
Cargas actuantes en el plano Horizontal
-60000,00
-50000,00
-40000,00
-30000,00
-20000,00
-10000,00
0,00
10000,00
20000,00
30000,00
40000,00
50000,00
-48570,86
-11548,61
Rah
Fh
Rbh
Qh
18511,13
41608,34
Cargas actuantes en el plano Vertical
-25000,00
-18721,09
-20000,00
Newtons
-15000,00
-10000,00
-5000,00
Rav
Fv+Grd
Rbv
Qv+Qp
0,00
1353,77
5000,00
5337,85
10000,00
15000,00
12029,47
Nm
Momento Flector plano Horizontal
7000,00
6000,00
5000,00
4000,00
3000,00
2000,00
1000,00
0,000,00
-1000,00 A
-2000,00
-3000,00
-4000,00
5553,34
R
-3464,58
B
0,00
P
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Momento Flector plano Vertical
4000,00
3500,00
3000,00
Nm
2500,00
2000,00
3608,84
1500,00
1000,00
1601,35
500,00
0,000,00
-500,00 A
R
0,00
P
B
Mom ento Flector Resultante
7000,00
6000,00
Nm
5000,00
4000,00
3000,00
5779,61
5002,70
2000,00
2501,35
1000,00
4334,71
3912,29
3334,31
2806,65
3752,03
2889,81
1444,90
1250,68
0,000,00
A
R
B
0,00
P
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Paso 10): Cálculo de los diámetros D3 y D5 por la fórmula A.S.M.E..
Siendo en D3 y / o en D5, máximo el momento flector resultante y existiendo torsión en los ‘cilindros’
correspondientes y chavetero en el cilindro correspondiente a D3, un buen punto de partida para el
dimensionamiento del árbol consiste en calcular dichos diámetros con la formula del reglamento
A.S.M.E. para árboles flexotorsionados:
Wp =
π ⋅ D3
1
=
⋅
16
s ys
(m f ⋅ Mfr )2 + (m t ⋅ Mt )2
donde
Wp = Módulo resistente polar correspondiente al diámetro D en cálculo
Sys = Tensión tangencial (falla estática) admisible del material a utilizar en la construcción del
árbol.
mf = Coeficiente a aplicar al momento flector Mfr actuante, atendiendo al cambio de signo de las
tensiones normales de flexión que la rotación del árbol produce y a la forma de aplicación de las
cargas. Valor a adoptar: 1,8
mt = Coeficiente a aplicar al momento torsor Mt actuante, atendiendo al cambio de signo de las
tensiones tangenciales de torsión y a la forma de aplicación de las cargas. Valor a adoptar: 1, en
función de resultar un momento torsor de magnitud ‘vectorial’ constante.
Del libro de texto Diseño de Elemento de Maquina de Virgil Moring Faires, página 746, tabla AT 8, se
obtiene para el acero a emplear:
Sy = 368 * 106 N / m2 (Pa) = 368 Mpa = 3726kg/cm2 = 36552 N/cm2
Su = 634 * 106 N / m2 (Pa) = 634 MPa = 6468 kg/cm2= 63451 N/cm2
Siendo que a lo largo de D3, el momento flector puede resultar máximo en su centro ‘longitudinal’ o en
su acuerdo con D4 y el momento torsor resulta máximo en dicho acuerdo y toma el valor medio en el
centro ‘longitudinal’, corresponde calcular D3 conforme:
a) De resultar máximo el momento flector en el centro ‘longitudinal’, corresponde calcular el
diámetro en dicha sección como así también en el acuerdo con D4 y adoptar el mayor valor,
adoptando Sys para zonas con chaveteros en ambas situaciones.
b) De resultar máximo el momento flector en el acuerdo con D4, es suficiente calcular el
diámetro en dicha sección, adoptando Sys para zonas con chaveteros.
mf - Coeficiente a aplicar al momento flector 1,8
mt - Coeficiente a aplicar al momento torsor 1,0
Para Sys y donde no existen chaveteros (D5), se adopta el menor valor que resulte de:
a) Sys = 30% de Sy (30% de la tensión de fluencia)
30% de Sy (Mpa)
b) Sys = 18% de Su (18% de la tensión de rotura estática)
18%de Su (Mpa)
Sys = 109,611 Mpa = 10961 N/cm2
Para Sys y donde existen chaveteros (cilindros D3 y D7), se adopta el 75 % del valor que resulte del
cálculo anterior.
Sys chav- Tensión tangencial por Falla estática =
Para D3:
Mfr - Momento flector resultante = M fr =
(Rah ⋅ C )2 + (Rav ⋅ C )2
Mfr = 5002,7 Nm
Mt = momento torsor actuante
;;
82,209
Mpa
= 8221
N/cm2
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
Mt - Momento torsor
CHOQUE RAUL
HOJA:
6902
Nm
Modulo Resistente según ASME
Wp =
1
⋅
s ys
(m
⋅ M fr ) + (mt ⋅ M t ) = 138015 mm3
2
f
D3 = 3
2
W p ⋅16
π
= 88,9 mm
Para D3 – D4
2
M fr
⎡
b⎞
b⎤ ⎡
b⎞
b⎤
⎛
⎛
= ⎢ Rah ⋅ ⎜ C + ⎟ + Fh ⋅ ⎥ + ⎢ Rav ⋅ ⎜ C + ⎟ + (Fv + Grd ) ⋅ ⎥
2⎠
2⎦ ⎣
2⎠
2⎦
⎝
⎝
⎣
Mfr - Momento flector resultante
3712,6
Nm
Mt - Momento torsor
6902,5
Nm
Wp =
1
⋅
s sfe _ chav
(m
⋅ M fr ) + (mt ⋅ M t ) ⋅
2
f
2
Wp - Modulo Resistente según ASME
D3 - Diametro
2
1000mm 3
=
N .m
1
Mpa
116867
mm3
84,11
mm
Para D5
M fr =
(Rah ⋅ 2 ⋅ C + Fh ⋅ C )2 + (Rav ⋅ C + (Fv + Grd ) ⋅ C )2
Mfr =
5779,61
Nm
Mt =
6902,5
Nm
Modulo Resistente según ASME Wp =
113902
mm3
83,4
mm
Momento flector resultante
Momento torsor
Diametro
D5 =
b
b/2 b/2
RODAMIENTO
A BOLAS
POLEA
CONDUCIDA
RODAMIENTO
A RODILLOS
PIÑON
|
D4
D1
D2
D7
D5
D3
C=300mm
D6
C=300mm
C=300mm
Paso 11): Escalonamientos (diferencias entre diámetros) a considerar entre D3, D4 y D5 y valores
“primarios” para dichos diámetros.
Atendiendo a las siguientes razones:
a) Montaje y posicionamiento de los distintos elementos (rodamientos, polea y rueda dentada)
sobre el árbol.
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
b) Precio de producto, atendiendo fundamentalmente a los rodamientos, los cuales dentro de las
especificaciones de carga a soportar y de vida útil, en términos generales conviene que sean del
menor tamaño posible.
c) Menor momento de inercia polar de segundo orden posible, a efectos disminuir la energía a
utilizar en el arranque y en el frenado del sistema (momento torsor de arranque / frenado =
momento de inercia polar de segundo orden por aceleración angular)
d) Menores concentradores de tensiones (menores diferencias posibles de diámetros (menor
discontinuidad)).
resulta conveniente fijar criterios de diferencias de diámetros, sin que por ello las diferencias mínimas
tabladas deban ser respetadas si es que las mismas resultan ser superiores a las diferencias máximas,
en tal caso se tomarán las máximas como válidas.
Adoptando entonces D5 = D3 = inmediato superior múltiplo de 5 mm (rodamientos) al mayor valor
calculado de entre ambos, D4 resulta de:
D3 + 5 mm = D5 + 5 mm ≤ D4 ≤ 1,2 * D5 = 1,2 * D3
Teniéndose así dimensionados en una primera instancia, D3 = D5 y D4, es necesario aclarar que los
fabricantes de rodamientos especifican las diferencias mínima y máxima posibles de diámetros en el
escalonamiento correspondiente para el árbol (la diferencia de radios no conviene que sea mayor que el
espesor de la pista interior del rodamiento correspondiente). Razones prácticas en cuanto a que dichos
datos son volcados en catálogos de no muy fácil acceso como así también razones simplificatorias para
el trabajo práctico, hacen apropiado no especificar la recurrencia a los mismos y utilizar la tabla
anterior, sin que ello implique que la misma sea verídica.
Para D3 tomamos el máximo superior entero múltiplo de 5, entre el calculado para D3 y D3-D4
D3 y D5 - Diámetros adoptados=
90
mm
Mínimo = 90 + 5 =
95
mm
108
102
mm
mm
D4
Máximo =1,2 * 90 =
D4 - Diámetro adoptado =
Paso 12): Selección del rodamiento radial a rodillos cilíndricos (vinculo móvil) a colocar en D5
Razones del tipo de rodamiento según SKF (aparte de las ya expuestas, en la introducción):
carga radial pura: ++ (al ser nuestro vinculo movil)
carga axial pura: -- (Al no existir cargas axiales, que por otra parte y si las mismas resultan de
escaso valor frente a las radiales correspondientes, solo podrían ser soportadas por el
rodamiento radial rígido a bolas y a colocar en el otro vinculo)
carga combinada: - momentos : - alta velocidad : +++ (mas que bueno, al ser la velocidad de giro del árbol muy baja)
alta exactitud de giro : ++ (asegura un huelgo constante entre dientes del los engranajes)
alta rigidez : ++
funcionamiento silencioso : ++
bajo rozamiento : ++
compensación de desalineación en funcionamiento: compensación de errores de alineación (inicial) : - (molino arranque sin carga)
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
disposición de rodamiento fijo : -- (el rodamiento a bolas es el fijo)
disposición de rodamiento libre : +++ (es nuestro rodamiento libre, vinculo movil)
desplazamiento axial posible en el rodamiento: +++ (se tiene en cuenta por la posible dilatación
termica del arbol)
Símbolos:
+++
Excelente
-
Mediocre
++
Bueno
--
Inadecuado
+
aceptable
→
Simple efecto
↔
Doble efecto
Se tomará como carga radial equivalente y actuante, la reacción de vínculo resultante RB multiplicada
por 1,2, atendiendo al tipo de máquina a accionar y a manera de coeficiente de sobredimensionamiento:
2
2
PB = 1,2 ⋅ RB = 1,2 ⋅ RBh
+ RBv
Carga radial equivalente
- Reacción de vinculo resultante en el cojinete Rb =
Pb = 1,2 * 48590 N =
48590
N
58308
N
Siendo CB = capacidad dinámica mínima requerida para el rodamiento (carga bajo la cual el mismo
posee una duración ‘estadística’ de 106 revoluciones en condiciones normales de funcionamiento) y L10
la duración ‘estadística’ pretendida del rodamiento en 106 revoluciones, resulta de aplicación la
siguiente expresión:
1
CB = PB ⋅ (L10 )b
con b = 10 / 3 (rodamientos a rodillos)
Para el cálculo de L10 y siendo Lh la duración pretendida en horas de funcionamiento y ω la velocidad
angular (polea conducida, cálculo de correas) en vueltas por minuto, corresponde aplicar:
Suponemos:
Duración pretendida en horas Lh =20000 horas
Duración pretendida en millones de revoluciones
19,5
L10 (Mr) =
rad
seg
⋅ 3600
⋅ 20000h
seg
h
= 223 Mr
2 ⋅ π ⋅10 6
Capacidad dinámica mínima requerida
CB = 58308 N * (223Mr)3/10 = 295449 N
Con el valor de CB calculado se selecciona el rodamiento radial a rodillos cilíndricos, de tal manera que
su diámetro interior sea igual o mayor al diámetro D5 dimensionado en pasos anteriores como así
también su capacidad dinámica frente a la requerida. De esta forma resulta el diámetro D5 del árbol
(igual al diámetro interior del rodamiento), el rodamiento correspondiente y nuevamente y si
corresponde, los diámetros D3 y D4 conforme lo ya expuesto.
Designación
Cojinete:
rodamiento
De una hilera de
rodillos
cilíndricos
d - Diámetro Interior ≥ D5
C - Capacidad Dinámica > CB
D - Diámetro Exterior
Co – capacidad estática
b - Ancho
NU 318 EC
90
319000
190
360000
43
mm
N
mm
N
mm
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Paso 13): Escalonamientos (diferencias entre diámetros) restantes y valores para los diámetros D1,
D2, D6 y D7.
Atendiendo a las mismas razones expuestas en el Paso 11) y utilizando valores enteros en mm, sin que
haya que tomar el menor valor si es que el mismo resulta mayor, que el mayor, se aplica:
D2 y D6
Mínimo = 0,83 * 90 mm =
74,70
mm
Máximo = 90mm – 1 mm =
89,00
mm
86
mm
Mínimo = min ( 0,83*86 y 86-5) =
71,38
mm
Máximo = max (0,83*86 y 86-5) =
81,00
mm
80
mm
D2 y D6 - Diámetros adoptados
D1 y D7
D1 y D7 - Diámetros adoptados
Paso 14): Selección del rodamiento radial a bolillas (vinculo fijo) a colocar en D1
carga radial pura: +
carga axial pura: + ↔
carga combinada: +
momentos : alta velocidad : +++
alta exactitud de giro : +++ (es importante, para mantener la distancia entre engranajes)
alta rigidez : +
funcionamiento silencioso : +++
bajo rozamiento : +++
compensación de desalineación en funcionamiento: compensación de errores de alineación (inicial) : disposición de rodamiento fijo : ++
disposición de rodamiento libre : +
desplazamiento axial posible en el rodamiento: -- (es nuestro enclavamiento axial)
El procedimiento de selección de este tipo de rodamientos resulta idéntico a la selección del tipo
anterior, a excepción de que ahora el coeficiente adimensional b resulta ser 3, como indican los
fabricantes de rodamientos.
Carga radial equivalente
PA = 1,2 ⋅ R A = 1,2 ⋅ R 2Ah + R 2Av
Reacción de vinculo resultante en el cojinete
Ra = (11549 2 + 12029 2)1/2 = 16676 N
Entonces
Pa = 1,2 * 16676 N = 20011 N
Con el valor de L10 ya calculado, la capacidad de carga dinámica mínima requerida en este caso resulta
en:
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
1
CA = PA ⋅ (L10 )b
CHOQUE RAUL
HOJA:
con b = 3 (rodamientos a bolillas)
Capacidad dinámica mínima requerida
CA = 20011 N * (223Mr)1/3 = 121430 N
Con los valores de CA y de D1 calculados se selecciona el rodamiento mas apropiado que verifique un
diámetro interior ≥ D1 y que iguale o supere la capacidad de carga dinámica requerida. Si resulta un
diámetro interior de rodamiento mayor al D1 calculado, deberán redimensionarse todos los diámetros,
elevando sus valores en posiblemente 5 mm, y reseleccionar el rodamiento a rodillos.
Designación
Cojinete:
Rodamiento
rígido de
una hilera
de bolas
6316
d - Diámetro Interior = D1
80
C - Capacidad Dinámica > CA
D - Diámetro Exterior
b - Ancho
Co – capacidad de carga
estática
mm
124000
N
170
mm
39
mm
86500 N
Paso 15): Longitud del cubo o maza de la polea (longitud diámetro D7) con valor entero en mm.
1,5 * D7 ≤ L7 ≤ 1,7 * D7
Mínimo = 1,5 *80 mm =
120,00
Máximo = 1,7 * 80 mm =
136,00
mm
128
mm
L7 - Longitud de la maza de la polea Adoptado
mm
Paso 16): Dimensionamiento previo del árbol y rodamientos correspondientes al mismo.
Habiéndose calculado / dimensionado todos los diámetros y seleccionado ambos rodamientos, se
dimensiona el árbol completo (longitudes y diámetros) y se especifican los rodamientos, teniendo en
cuenta los requerimientos expuestos, a saber:
a) Expresión de A.S.M.E. para D3 y D5
b) Diferencias entre diámetros
c) Capacidad de carga dinámica de rodamientos
sin que por ello tanto los diámetros como la capacidad de carga dinámica de los rodamientos
seleccionados, no puedan ser superiores a los requeridos.
Largo del Diámetro 2 = C – (Long D1 / 2) – (long D3 / 2)
Largo del Diámetro 4 = C – (Long D3 / 2) – (long D5 / 2)
Largo del Diámetro 6 = C – (Long D5 / 2) – (long D7 / 2)
Sección
Diámetros (mm)
Largo (mm)
D1
80
39
D2
86
225,5
D3
90
110
D4
102
223,5
D5
90
43
D6
86
214,5
D7
80
128
longitud total del arbol =
983,5
Elemento
Rodamiento de bolas
Rueda Dentada
Rodamiento de rodillos
Polea
mm
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
VERIFICACIÓN por A.S.M.E.
Paso 17): Con la siguiente expresión de A.S.M.E. se calculan las máximas tensiones tangenciales de
trabajo para cada una de las secciones y en él / los punto / s mas crítico / s de las mismas, como así
también los coeficientes de sobredimensionamiento resultantes, atendiendo a los momentos flector y
torsor actuantes y utilizando mf = 1,8 y mt = 1.
τ trab =
16
⋅
π ⋅ D3
(m f ⋅ Mfr )2 + (m t ⋅ Mt )2
τ trab =
ó
(mf ⋅ Mfr )2 + (m t ⋅ Mt )2
WP
Teniéndose dimensionado el árbol, el esquema del mismo dibujado en el Paso 09) puede ser ahora
‘completado’ dibujando las longitudes de los distintos tramos en la escala respectiva y mostrando los
diámetros y escalonamientos (no hace falta escala para los mismos) para así obtener por escala los
momentos flector resultante y torsor a aplicar en cada sección a verificar, sin necesidad de hacer
cálculo de momento alguno.
Los coeficientes de sobredimensionamiento resultan efectuando el cociente entre la tensión tangencial
admisible y la tensión tangencial de trabajo, en cada caso:
Cs =
s ys
τ trab
Atendiendo a la tensión tangencial admisible y a la sección crítica en cada cilindro, surge la siguiente
tabla de valores:
τtrab
TABLA ASME
Diámetro
cm
Wp
cm3
mf * Mfr
N.cm
mt * Mt
N.cm
Sys
N/cm2
N/cm2
D1 (cm) Acuerdo D1-D2
8,0
100,5
58531,6
0
10961
D2 (cm) Acuerdo D2-D3
8,6
124,9
735397,6
0
D3 (cm) Centro D3
9,0
143,1
900486,9
D3 (cm) Acuerdo D3-D4
9,0
143,1
D5 (cm) Acuerdo D4-D5
9,0
143,1
D5 (cm) Centro D5
9,0
D6 (cm) Acuerdo D5-D6
8,6
124,9
965772,9
D7 (cm) Acuerdo D6-D7
8,0
100,5
221937,0
Cs
mayor
que 1?
582,2
18,83
SI
10961
5888,4
1,86
SI
345128,2
8221
6737,2
1,22
SI
680258,3
690256,4
8221
6770,5
1,21
SI
943976,2
690256,4
10961
8169,8
1,34
SI
143,1 1040329,8 690256,4
10961
8722,3
1,26
SI
690256,4
10961
9505,1
1,15
SI
690256,4
8221
7212,3
1,14
SI
NOTA: En el acuerdo D1 – D2 no hay torsión y prácticamente tampoco flexión, por ello es Cs es mucho mayor que
en los otros diámetros.
VERIFICACIÓN por SOLICITACIONES VARIABLES,
conforme Teoría de Falla de la Máxima Tensión Tangencial
Paso 18): Siendo que el momento torsor resulta constante (no cambia de sentido por rotar el árbol
siempre en la misma dirección) y que existe flexión rotativa (las tensiones normales sobre una misma
fibra cambian de signo cada media rotación no causando tensiones normales medias), cualquiera sea la
sección en análisis.
En el análisis de los esfuerzos, vemos que por acción de las cargas, el eje se deforma y genera una
flecha, pero como gira constantemente, el esfuerzo de flexión variara a través de cada giro completo.
Entonces se hace necesario conocer el esfuerzo equivalente para sustituirlo en la ecuación del proyecto.
Este esfuerzo equivalente será, una normal y otro cortante.
En cuanto al par de torsión diremos que se mantiene constante durante en cada sección cíclicamente.
Ecuación de proyecto
2
1 ⎡⎛ s e ⎞ ⎛ s es
= ⎢⎜ ⎟ + ⎜
Cs ⎢⎜⎝ s n ⎟⎠ ⎜⎝ s ns
⎣
⎞
⎟⎟
⎠
2
1
⎤2
⎥
⎥⎦
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
se =
El esfuerzo equivalente de flexión se expresa como
CHOQUE RAUL
HOJA:
sn
⋅s m +s a
sy
pero el modulo del máximo y mínimo esfuerzo flector es el mismo, entonces s max = s min
Para el esfuerzo medio
s max + s min
=0
2
sm =
Para el esfuerzo alternativo
D
Mf ⋅
s max − s min
Mf ⋅ c
2 = M ⋅ 2 ⋅ 16
=
= smax =
sa =
f
I
2
π ⋅ D4
π ⋅ D3
64
Si llamamos a
Wp =
π ⋅ D3
16
Entonces el esfuerzo equivalente por flexion queda igual a:
se =
2 ⋅ Mf
Wp
Esfuerzo cortante equivalente
s ns
⋅s ms +s as
s ys
s es =
Como el para torsor es constante a través de cada sección transversal, inferimos que no existe sa ,
siendo
s ms
D
M ⋅c
2 = M ⋅ 16 = M t
= t =
t
J
π ⋅ D3 Wp
π ⋅ D4
32
Mt ⋅
Luego
s es =
s ns M t
⋅
s ys Wp
Reemplazamos en la ecuación del proyecto
⎡⎛ 2 ⋅ M
f
⎢⎜
1 ⎢⎜ Wp
=
Cs ⎢⎜ s´n
⎢⎜
⎣⎢⎝
2
⎞ ⎛⎜ s ns ⋅ M t ⎞⎟
⎟
⎟ + ⎜ s ys Wp ⎟
⎟
⎟ ⎜ s ns
⎟⎟
⎟ ⎜⎜
⎠ ⎝
⎠
1
1 ⎡⎢⎛ Mf
=
⋅ ⎜
Cs Wp ⎢⎜⎝ s´ns
⎣
2
⎞ ⎛ Mt
⎟⎟ + ⎜
⎜
⎠ ⎝ s ys
Cs =
⎞
⎟
⎟
⎠
(M
2
2
1
⎤2
⎥
⎡
⎥ = 1 ⋅ ⎢⎛⎜ 2 ⋅ M f
⎥
Wp ⎢⎜⎝ 2 ⋅ s´ns
⎥
⎣
⎦⎥
⎞
⎟⎟
⎠
2
⎛M
+⎜ t
⎜s
⎝ ys
⎞
⎟
⎟
⎠
2
1
1
⎤2
⎡ (M ⋅ s )2 + (Mt ⋅ s´ns )2 ⎤ 2
⎥ = 1 ⋅ ⎢ f ys
⎥
2
Wp ⎢⎣
⎥
(
s´ns ⋅s ys )
⎥⎦
⎦
Wp ⋅ s´ns ⋅s ys
⋅ s ys ) + (Mt ⋅ s´ns )
2
f
1
⎤2
⎥
⎥
⎦
2
Luego afectando a s´ns con los concentradores de tensiones, tenemos sns = πk . s´ns
Por lo tanto la ecuación para verificar el coeficiente de seguridad es:
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
Cs =
(M
CHOQUE RAUL
HOJA:
Wp ⋅ s ys ⋅ s ns
⋅ s ys ) + (M t ⋅ s ns )
2
f
2
Dado que el árbol se encuentra dimensionado conforme los pasos anteriores y de que ahora se procede
a una verificación con el concepto de solicitaciones variables, se trata de calcular los Cs
correspondientes a las secciones críticas como con A.S.M.E y verificar que los mismos sean mayores a
la unidad.
Para la tensión normal admisible a los esfuerzos alternativos “puros” y para la probeta (S’n), resulta:
S´n = 0,5 * Su = 0,5 * 63451 N / cm2 ≅ 31725 N / cm2
Para la tensión tangencial admisible a los esfuerzos alternativos “puros” y para la probeta (S’ns),
resulta:
S´ns = 0,5 * S´n = 0,5 * 31725 N / cm2 ≅ 15862 N / cm2
Siendo para cada sección a verificar:
Sys = 0,5 * Sy = 0,5 * 36552 N / cm2 ≅ 18276 N / cm2
Ssu = 0,5 * Su = 0,5 * 63451 N / cm2 ≅ 31725 N / cm2
Sns = πk * S´ns = ka * kb * kc * kd * ke * kf * kg * S´ns
Sns = ka * kb * kc * kd * ke * kf * kg * 15862 N/cm2
Para cada sección se tendrán en cuenta los siguientes coeficientes k:
a) ka = Factor de acabado superficial
Torneado = 0,75 ---- Rectificado = 0,90
b) kb = Factor de tamaño
Para diámetros menores o iguales a 7,6 mm: kb = 1
Para diámetros comprendidos entre 7,6 mm y 50 mm: kb = 0,85
Para diámetros mayores a 50 mm: kb = 0,75
c) kc = Factor de confiabilidad = 0,9
d) kd = Factor de temperatura
Tratándose de temperaturas de trabajo normales: kd = 1
e) ke = Inversa del factor físico Kf de concentración de tensiones a la flexión rotatoria o
alternativa.
ke = 1 / { 1 + q * (Kt -- 1) }
Los valores de q = sensibilidad a la entalla se obtienen del DIAGRAMA 01 siguiente utilizando los
radios de acuerdo que se exponen acontinuación del DIAGRAMA 02 siguiente:
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
Radios de acuerdo a utilizar:
Diámetro mayor en mm
Radio de acuerdo en mm
10 a 20
21 a 35
36 a 60
61 a 80
mayor que 81
1
1,5
2
2,5
3
CHOQUE RAUL
HOJA:
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Los valores de Kt = factor geométrico de concentración de tensiones a la flexión rotatoria o alternativa,
se obtienen del DIAGRAMA 2 anterior
f) kf = Factor de efectos diversos = 1
g) kg = Inversa del concentrador de tensiones por chavetero:
Diámetro
mayor
Diámetro
Menor
Radio
acuerdo
Kt
q
ke
Acuerdo D1-D2
86
80
3
1,86
0,836
0,582
Acuerdo D2-D3
90
86
3
1,75
0,836
0,614
Acuerdo D3-D4
102
90
3
2,07
0,836
0,527
Acuerdo D4-D5
102
90
3
2,07
0,836
0,527
Acuerdo D5-D6
90
86
3
1,75
0,836
0,614
Acuerdo D6-D7
86
80
3
1,86
0,836
0,582
TABLA COEF. ke
TABLA COEF. k
ka
kb
kc
kd
ke
kf
kg
Prod k
Acuerdo D1-D2
0,90
0,85
0,90
1,00
0,582
1,00
1
0,4006
Acuerdo D2-D3
0,75
0,85
0,90
1,00
0,614
1,00
1
0,3522
Centro D3
0,75
0,85
0,90
1,00
1,000
1,00
0,75
0,4303
Acuerdo D3-D4
0,75
0,85
0,90
1,00
0,527
1,00
0,75
0,2269
Acuerdo D4-D5
0,90
0,85
0,90
1,00
0,527
1,00
1
0,3631
Centro D5
0,75
0,85
0,90
1,00
1,000
1,00
1
0,5738
Acuerdo D5-D6
0,75
0,85
0,90
1,00
0,614
1,00
1
0,3522
Acuerdo D6-D7
0,75
0,85
0,90
1,00
0,582
1,00
0,75
0,2504
S´ns =
15862
N/cm2 ;;; Sns = Prod K . S´ns
Sys =
18276
N/cm2
Conocidos los momentos flector y torsor actuantes en cada una de las secciones a verificar, resulta el
coeficiente de sobredimensionamiento respectivo con:
Cs =
(M
TABLA SOLICITACIONES
VARIABLES
Diámetro
Wp
cm
cm3
D1 (cm) Acuerdo D1-D2
8,0
D2 (cm) Acuerdo D2-D3
Wp ⋅ s ys ⋅ s ns
⋅ s ys ) + (M t ⋅ s ns )
2
f
2
Sns
Mfr
Mt
N/cm2
N.cm
N.cm
Cs
que 1?
100,53 0,4006 6351,55
32517,58
0
19,64
SI
8,6
124,88 0,3522 5583,81
408554,2
0
1,71
SI
D3 (cm) Centro D3
9,0
143,13 0,4303 6823,04
500270,5
345128,21
1,89
SI
D3 (cm) Acuerdo D3-D4
9,0
143,13 0,2269 3598,03
377921,3
690256,41
1,28
SI
D5 (cm) Acuerdo D4-D5
9,0
143,13 0,3631 5756,85
524431,2
690256,41
1,45
SI
D5 (cm) Centro D5
9,0
143,13 0,5738 9097,38
577961,0
690256,41
1,94
SI
D6 (cm) Acuerdo D5-D6
8,6
124,88 0,3522 5583,81
536540,5
690256,41
1,21
SI
D7 (cm) Acuerdo D6-D7
8,0
100,53 0,2504 3969,72 123298,35 690256,41
2,06
SI
Prod k
mayor
Nota: si hubiéramos usado en vez de 0,5.Su = S´n, que corresponde a la teoría de rotura de máxima tensión
tangencial, la relación 0,6.Su = S´n que es del AISC tendríamos mayores Cs.
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
CHOQUE RAUL
HOJA:
Paso 19 con normas iram): SECCIONES TRANSVERSALES DE CHAVETAS Y CHAVETEROS
Atendiendo a la normalización y estandarización que pueda resultar en uso, se dimensionarán las
chavetas y los chaveteros conforme la siguiente tabla, donde las dimensiones puestas en juego se
expresan en mm.
Dimensiones
Profundidad
chaveta
Ancho Altura
Diámetro árbol
D
6
chavetero
en árbol
Profundidad chavetero
en polea / rueda dentada
Ach
Hch
Pa
Pp
2
2
1,1
0,9
<
D
≤
8
8
<
D
≤
10
3
3
1,7
1,3
10
<
D
≤
12
4
4
2,4
1,6
12
<
D
≤
17
5
5
2,9
2,1
17
<
D
≤
22
6
6
3,5
2,5
22
<
D
≤
30
8
7
4,1
2,9
30
<
D
≤
38
10
8
4,7
3,3
38
<
D
≤
44
12
8
4,9
3,1
44
<
D
≤
50
14
9
5,5
3,5
50
<
D
≤
58
16
10
6,2
3,8
58
<
D
≤
65
18
11
6,8
4,2
65
<
D
≤
75
20
12
7,4
4,6
75
<
D
≤
85
22
14
8,5
5,5
85
<
D
≤
95
25
14
8,7
5,3
95
<
D
≤
110
28
16
9,9
6,1
<
D
≤
130
32
18
11,1
6,9
110
Referencia: Lengüetas longitudinales de ajuste (altas) Norma I.R.A.M. 5054 Octubre de 1.958
Teniendo definidas las longitudes de los cilindros del árbol donde van colocadas las chavetas, los
mismos de diámetros D3 y D7, y a efectos de no concentrar tensiones por chaveteros en los acuerdos
con sus cilindros vecinos, se adoptará como longitud Lch de chaveta y de chavetero en el árbol, la
longitud del cilindro correspondiente menos D / 4 por cada extremo del mismo, si los mismos resultan
ser también acuerdos con otro cilindro. Si no existe dicho acuerdo como es el caso del ‘extremo no
vinculado’ de D7, la chaveta y el chavetero llegarán hasta dicho extremo; de donde y con valores enteros
en mm, resulta:
TABLA DIMENSIONES
DE CHAVETAS
Diámetro
Dimensiones chaveta
Profund. chavetero
Ancho
Alto
Largo
Arbol
Polea
D (cm)
Ach (cm)
Hch (cm)
Lch (cm)
Pa (cm)
Pp (cm)
Diámetro D3 (cm)
9,0
2,50
1,40
6,5
0,87
0,53
Diámetro D7 (cm)
8,0
2,20
1,40
10,8
0,85
0,55
Las chavetas resultan así sometidas a una fuerza de corte cizallante, atendiendo al momento torsor
transmitido y que resulta de dividir dicho momento torsor por el radio del cilindro correspondiente del
árbol (fuerza tangencial en la periferia del árbol), oponiendo una sección resistente igual a su ancho por
su largo. Se calculará la tensión de corte correspondiente en cada caso, con las siguientes expresiones
y se elaborará la siguiente tabla:
UTN - UARG
CALCULO DE ARBOL DE TRANSMISION
TP: TRANSMISION DE POTENCIA MECANICA EN UN MOLINO DE BOLAS
TABLA
SOLICITACIONES EN
CHAVETAS
Diámetro D3 (cm)
Diámetro D7 (cm)
CHOQUE RAUL
HOJA:
Dimensiones chaveta
Diámetro
Momento
Torsor
Fuerza de
corte
Ancho
Largo
Tension
cizallante
D (cm)
Mt (N.cm)
Fc (N)
Ach (cm)
Lch (cm)
τ (N/cm2)
9,0
8,0
690256,41
690256,41
153390
172564
2,50
2,20
6,50
10,80
14159,11
10894,20
UTN
UARG
Estudio del arranque del molino y sus influencias en
el engranaje
Choque Raúl
Hoja :
Supongamos un sistema compuesto por un molino de bolas como maquina conducida, comandada
por un motor eléctrico trifásico con rotor en corto circuito tipo jaula de ardilla. Ambas maquinas
acopladas por una transmisión compuesta por correas y engranajes y sus respectivos árboles.
Para evitar la alta cupla resistente que se produciría en el molino con carga, se procede al
arranque sin carga, porque se lo contrario el momento de inercia seria muy alto ocasionando un
tiempo de arranque superior al admitido en el peor de los casos con consecuencia como el
calentamiento inadmisible del devanado del motor.
motor
Maquina
motora
poleas
Engranjes
molino
Transmisión 1
Transmisión 2
Maquina
conducida
La interacción en una grafico cupla – velocidad de rotación de la, cupla motora y la cupla
resistente, ambas reducidas a un mismo lado de rotación (motor o molino), nos permiten hallar
un punto de trabajo donde la cupla consumida iguala a la cupla del motor.
M´Molino = Mmotor
Donde : M´Molino es la cumpla del molino reflejada al lado del motor
Mt o cupla (N.m)
Curva
motor
cupla de
arranque
cupla de resistente
de arranque
Curva
máquina útil
punto de equilibrio
s
velocidad
de equilibrio
En velocidades inferiores a la de equilibrio el
Mm > MM
Entonces se produce un momento acelerador
Macelerador = Mm - MM
El momento acelerador es el encargado de acelerar a ambos equipos desde su situación de reposi
hasta la velocidad de equilibrio.
El momento de inercia que se debe acelerar será la suma de los momentos del motor, las poleas,
las ruedas y el molino, ósea:
Jtotal = Jmotor + Jpoleas + Jrueda + Jmolino
UTN
UARG
Estudio del arranque del molino y sus influencias en
el engranaje
Choque Raúl
Hoja :
La ecuación del movimiento sera:
Macel = JT * α = JT . dw/dt
Separando variables e integrando e/ limites, tendremos
t
a
1
∫ JT ⋅ Macel ⋅ dw = ∫0 dt = t a
• Momento de inercia de masa de los engranajes
El momento de inercia de la corona la consideramos incluida dentro del peso calculado del tambor
del molino, por lo tanto resta calcular paro los engranajes el del piñón
Jpiñon = (1 / 2) * mpiñon * R2piñon
Datos del piñón
Masa: peso / (9,81m/seg2) = 681 N / (9,81 m/seg2) = 69,4 kg
Dppiñon = 320 mm →
R = 0,16 m
Jpiñon = (1 / 2) * 69,4 kg * 0,0256m2 →
Jpiñon = 0,89 kg.m2
• Momento de inercia de masa de la polea conducida
Jpc = (1 / 2) * mpolea conducida * R2polea conducida
Datos de polea conducida
Masa: peso / (9,81m/seg2) = 4000 N / (9,81 m/seg2) = 408 kg
Dppc = 1930 mm →
R = 0,965 m
Jpc = (1 / 2) * 408 kg * 0,931m2 →
Jpc = 190 kg.m2
• Momento de inercia de masa de la polea motora
Jpm = (1 / 2) * mpolea motora * R2polea motora
Datos de polea motora
Masa: peso / (9,81m/seg2) = 420 N / (9,81 m/seg2) = 42,81 kg
Dppm = 483 mm →
R = 0,24 m
Jpm = (1 / 2) * 42,81 kg * 0,0576m2 →
Jpm = 1,23 kg.m2
• Momento de inercia de masa del motor
JM = 9,7 kg.m2
(de tabla de fabricante)
• Momento de inercia de masa del Molino
JM = (1 / 2) * mM * R2M
Donde:
Masa: del molino mas corona, sin carga = 11000 kg
R : radio medio = 2 metros / 2 = 1m
JM = (1 / 2) * 11000 kg * 1m2 →
JM = 5500 kg.m2
UTN
UARG
Estudio del arranque del molino y sus influencias en
el engranaje
Choque Raúl
Hoja :
Se hace necesario reducir el momento de inercia de masas a uno de los extremos, debido a las
distintas velocidades con que trabajam cada uno, sea motor o molino, los reduciremos al lado del
motor, lo llamaremos momento de inercia equivalente
polea
engranajes
Molino
motor
Jm
Jp
Je
JM
El momento de inercia del motor lo podemos considerar como:
Jm = Jmotor + Jpolea motora = 1,23 kg.m2 + 9,7 kg.m2 = 10,93 kg.m2
Momento de inercia de la polea conducida y el piñon se pueden sumar ya que estan sobre el
mismo eje
Jpc = 190 + 0,89 = 190,9 kg.m2 =JT
Calculo del momento de inercia de masa equivalente, para una configuración en serie (desarrollo
de formula en anexo: tema 1 transmisiones mecanicas)
Jeq = J m +
JT
JM
+
2
η1 ⋅ i1 η1 ⋅ η 2 ⋅ (i1 ⋅ i 2 )2
Donde
i1= 8,33 relación de transmisión de los engranajes
i2 = 4 relación de transmisión de la poleas
η1 = 0,98 rendimiento de la transmisión por engranajes
η2 = 0,98 rendimiento de la transmisión por poleas
J
eq
= 10,93 +
190,9
0,98 ⋅ 8,332
+
5500
0,98 ⋅ 0,98 ⋅ (8,33.4 )2
= 10,93 + 2,81 + 5,16 =
Jeq = 19,1 kg.m2
Calculo del momento acelerador
Macel = αm * Jeq
Según Siemens y normas DIN el tiempo de arranque (tiempo necesario para alcanzar el régimen
permanente de trabajo partiendo desde del reposo) es ta ≤ 9 seg, en motores de velocidades
menores a 3000 rpm, debido al calentamiento que se produciría en el devanado estatorico.
Tomamos este tiempo por considerarlo el estado mas desfavorable
UTN
UARG
Estudio del arranque del molino y sus influencias en
el engranaje
dw
α=
⇒
dt
77 ,8 rad / seg
∫ dw
0
9 seg
m
=
∫α
m
.dt ⇒ α m =
Choque Raúl
Hoja :
8,64 rad/seg2
0
Por lo tanto la cupla de aceleración es
Macel = 19,1 kg.m2 * 8,64 rad/ seg2 = 165 kg * m2/seg2
Macel = 165 Nm
Como
Macelerador = Mm – M´sistema
Donde:
M´sistema es del sistema polea engranaje y molino, reducido al motor.
La cupla nominal del motor es (considerando para el sistema en régimen permanente con
un 2% de perdidas que equivale a 2,64 kw)
Mmotor = P (kw) * (1000 w / 1 kw) * / n (rad/seg) = 134,6 * 1000 / 77,8 = 1730 Nm
La cupla de arranque es
Mmotor arr = 2 Mmotor = 3460 Nm (como varia en el tiempo consideramos este valor como
promedio cte para el tiempo de arranque)
M´sistema = Mm arr – Macelerador = 3460 Nm – 165 Nm = 3295 Nm
El momento torsor en una reducción múltiple será el producto del momento torsor que ingresa por
el producto de las sucesivas relaciones de transmisión. En este caso, el momento torsor que
ingresa será el del sistema demandado al motor ósea M´sistema y el de salida el momento torsor
que se refleja en el molino afectado por las relaciones de transmisión
Msistema = M´sistema * i1 * i2 = 3295 * 8,33 * 4 = 109794 Nm
P = M (Nm) * wMolino (rad/seg) / 1000 = 109794 * 2,35 / 1000
P = 258 kw potencia promedio durante el arranque
UTN
UARG
calculo de engranajes, estudio del arranque ecuacion de Lewis
TP Transmision de potencia en un molino de bolas
CHOQUE RAUL
HOJA:
CALCULO POR MEDIO DE LA ECUACION DE LEWIS cambiando a pot de arranque
Potencia a transmitir,
P=
258 kw = 350,9 CV
Diametro Primitivo del piñon, D1=
32 cm
n 2=
22,43
rpm
Vel. angular de la rueda,
envolvente del diente :
20 °
Servicio : uniforme intermitente
Relacionde velocidad
mw ≅
diamtro exterior de la rueda:
diamtro exterior del piñon:
w1 n1 D2 N 2
=
=
=
w2 n2 D1 N1
2,842
0,342
n1 = mw . n2 =
m
m
n 1=
subindice 1: rueda motora, piñon
subindice 2: rueda conducida
mw ≈ 8,31
186 rpm
considerando servicio uniforme (no se considera desgaste)
Tomamos la carga dinamica como funcion de velocidad unicamente
Velocidad en la circunferencia primitiva
vm= π . D1 . n1 =
Carga transmitida
Ft =
vm=
4500.P[CV ]
vm
187,3 m/min
Ft =
8430,7 kg
La vm =
187,3
m/min
cae dentro del intervalo superior aceptable para dientes
tallados comercialmente, pero supongamos que los dientes esten tallados cuidadosamente, entonces la
carga dinamica se calcula por la ec
Fd =
366 + vm
⋅ Ft
366
Fd=
12745
kg
Con dientes tipo intercambiables y con material del piñon mas duro, los dientes de la rueda son los mas
debiles. Solo comprobamos para la, rueda, los esfuerzos. Seleccionamos los siguientes materiales para la
rueda y el piñon, luego de considerar diferentes materiales, modulos y tamaños.
material
C1095
(revenido en aceite)
4140
Su(kg/cm²)
12373
18980
S´n
6187
9490
Sy (kg/cm²)
7874
16943
NDB
363
534
TABLA AT 9 FAIRES
rueda
piñon
S´n=0,5.Su
En la ecuacion de Lewis hay todabia cuatro incognitas: b, M, Y, Kf; asi pues, debe ser resuelta pór tanteo
Sea Kf =
1,6
(esto se aproximara bastante, para carga superior del diente 1,2 - 1,7)
Sea b(mm) = 10.M (mm), que esta dentro del intervalo generalmente deseado
Cuando se utiliza la ec. De Fd anterior, la hipotesis tradicional es que un diente puede soportar la plena
carga en la punta o parte superior; por tanto, adoptemos un valor apropiado de Y para esta
configuracion. Como Y no varia acusadamente, es adecuado algun valor razonable, para una
solucion en primera aproximacion.
0,32
Y=
(Tabla AT 24, FAIRES)
UTN
UARG
calculo de engranajes, estudio del arranque ecuacion de Lewis
TP Transmision de potencia en un molino de bolas
CHOQUE RAUL
HOJA:
Con la admision de estas diversas hipotesis, llegamos ha:
FS = Fd =
12745 kg =
s b
⋅ ⋅Y ⋅ M
k f 10
6186,5 kg/cm². M .
1,60
10
0,32
.M
10,1
M ≈ 10
Si suponemos que las herramientas de corte de que se dispone tinen un modulo de 10 o 11, elegimos
uno de estos modulos y probamos la resistencia; elegimos 11
Un procedimiento bueno es hallar el valor de "b" que iguala la resistencia a la carga dinamica.
Para
D
Np = 32
dientes del piñon
N P = P = 320 mm
M
10
Tenemos
Y=
y utilizamos Kf =
FS =
s b
⋅ ⋅Y ⋅ M =
k f 10
0,364
tb AT 24, Faires
1,60 como antes
12745 kg = 6187 kg/cm².
1,60
b=
b.
0,364
10
9,1 cm
comprobacion de la proporcion
b(mm)
90,6
=
=
9,1
M
10
aumentamos b para estar en un valor promedio de la relacion
por consiguiente es satisfactorio. Para
mw=
Ng= mw . M =
b (cm)
11
266
Np
32
intervalo recomendado el b/M
es de 8 a 12,5
→
b:
b(mm)/M=
8,31 , tenemos
dientes en la rueda
Por consiguiente una solucion es
M
10
.
10
Ng
266
110 mm
11,00
UTN
UARG
calculo de engranaje, estudio del arranque ecuacion de Buckingham
tp molino de bolas
choque raul
hoja:
CALCULO POR ECUACION DE BUCKINGHAM PARA CARGA DINAMICA
Tenemos:
vm =
Ft =
187,3
8431
m/min
kg
Hallamos el maximo error admisible por la figura AF 19, entrando con vm
187
entonces e =
0,010 cm
error maximo para
funcionamiento satisfactorio
Los calculos preliminares sugieren un modulo M:
10
Entrando en al figura AF20 con el valor de M y
e=
0,010 cm
Decidimos que los dientes deben ser tallados esmeradamente
tenemos un error probable
0,0042 cm
UTN
UARG
calculo de engranaje, estudio del arranque ecuacion de Buckingham
tp molino de bolas
Utilizamos e =
0,0042 cm
para dientes de altura completa y de
k = 0,111.e
choque raul
hoja:
y por tanto para nuestro caso
20 °
0,0004662
k=
Con dientes tallados esmeradamente y la carga dinamica de Buckingham, podemos suponer que la
carga es compartida por dos dientes hasta que el punto de aplicación se ha desplazado la mitad del
perfil aproximadamente.
Por la ecuacion
C=
k .E g .E p
Eg + E p
2109000
para el Acero Eg = Ep =
kg/cm²
Hallamos
C= 491,61
para una cara de anchura b =
Fd = Ft +
11,0 cm
obtemos por la ecuacion de Buckingham
0,164. v m .(b . C+ Ft )
0,164. v m + 1,484.(b . C+ Ft ) 2
1
=
kg
m ⎛
⎞
+ 4313 kg ⎟
.⎜11cm .491,61
cm
min ⎝
⎠
=
Fd = 4313 kg +
1
2
kg
m
⎛
⎞
+ 1,484.⎜11cm .491,61
+ 4313 kg ⎟
0,164.187,3
cm
min
⎝
⎠
0,164.187,3
425046,6
169,04
Fd= 8430,7 +
Fd=
10945,2
kg
El coeficiente de reduccion de la resistencia a la fatiga para la carga aplicada cerca de la linea media del
diente es mayor que con la carga aplicada en la parte superior; utilizamos
Kf= 1,7
por la tabla AT24, Np= Dp/M=
320 /
10 = 32,0
entrando con Np, carga cerca del centro y angulo del diente 20°, obtenemos
Y=
0,617
La resistencia del diente supuesto es,
6186,5 . 11,0
1,7
10
El factor de servicio es Fs/Fd =
Fs=
Fs =
.
s.b.Y .M
10.K f
0,617
2,3
.
10
=
24698,7
kg
(factor de seguridad)
Si este coeficiente no es satisfactorio, y ordinariamente es deseable algun margen de seguridad, se puede
utilizar un diente aun mayor, o un metodo mas exacto (y costoso) de fabricacion que reducira el error y
la carga dinamica. Por otra parte la ecuacion de Buckingham da resultados que caen dentro del lado de
seguridad.
Por lo tanto estos resultados confirman el primer calculo realizado sin tener en cuenta las cargas
dinamicas, la solucion es:
factor de seguridad
fabricacion
M
Np
Ng
b (cm)
2,3
10
32
266
11,0 talla esmerada
por lo tanto el factor de seguridad se nos redujo desde 4,1 que teniamos en el calculo sin
considerar las solicitaciones del arranque ha 2,3 durante el arranque
Bearings
The motors are normally fitted with single-row deep
groove ball bearings as listed in the table below.
If the bearing at the D-end is replaced with a roller
bearing (NU- or NJ-), higher radial forces can be handled.
Roller bearings are suitable for belt drive applications.
Basic version with deep groove ball bearings
Motor
size
2
Number
of poles
Deep groove ball bearings
D-end
N-end
When there are high axial forces, angular-contact ball
bearings should be used. This option is available on
request. When a motor with angular-contact ball
bearings is ordered, the method of mounting and direction and magnitude of the axial force must be specified.
For special bearings, please see the variant codes.
Version with roller bearings, variant code 037
Motor
size
Number
of poles
Roller bearings, variant code 037
D-end
71
2-6
6202 2RS C3
6202 2RS C3
71
2-6
–
80
2-6
6204 2RS C3
6204 2RS C3
80
2-6
–
90
2-6
6205 2RS C3
6205 2RS C3
90
2-6
–
100
2-6
6206 2RS C3
6206 2RS C3
100
2-6
–
112
2-6
6207 2RS C3
6206 2RS C3
112
2-6
–
132
2-6
6208 2RS C3
6207 2RS C3
132
2-6
–
160
2-12
6309/C3
6309/C3
160
2-12
NU 309
180
2-12
6310/C3
6309/C3
180
2-12
NU 310
200
2-12
6312/C3
6310/C3
200
2-12
NU 312
225
2-12
6313/C3
6312/C3
225
2-12
NU 313
250
2-12
6315/C3
6313/C3
250
2-12
NU 315
280
2
6316/C3
6316/C3
280
2
1
4-12
6316/C3
6316/C3
4-12
NU 316/C3
2
6316/C3
6316/C3
2
1
4-12
6319/C3
6316/C3
4-12
NU 319/C3
2
6316M/C3
6316M/C3
2
1
4-12
6322/C3
6316/C3
4-12
NU 322/C3
2
6317M/C3
6317M/C3
2
1
4-12
6324/C3
6319/C3
4-12
NU 324/C3
2
6317M/C3
6317M/C3
2
1
4-12
6326M/C3
6322/C3
4-12
NU 326/C3
315
355
400
450
1)
315
355
400
450
)
)
)
)
)
On request
Axially-locked bearings
The outer bearing ring at the D-end can be axially
locked with an inner bearing cover. The inner ring is
locked by tight tolerance to the shaft.
All motors are equipped as standard with an axiallylocked bearing at the D-end.
Transport locking
Motors that have roller bearings or an angular contact
ball bearing are fitted with a transport lock before
despatch to prevent damage to the bearings during
transport. In case of transport locked bearing, motor
sizes 280 to 450 are provided with a warning sign.
18
Locking may also be fitted in other cases where transport conditions are suspected of being potentially
damaging.
ABB/ LV Motors / Cat. BU / Process performance motors / LV Cast iron GB 03-2005
Permissible axial forces
The following tables give the permissible axial forces
in Newton, assuming zero radial force. The values are
based on normal conditions at 50 Hz with standard
bearings and calculated bearing lives of 20,000 and
40,000 hours.
For two-speed motors, the values are to be based on
the higher speed. The permissible loads of simultaneous
radial and axial forces will be supplied on request.
Given axial forces FAD, assumes D-bearing locked by
means of locking ring.
At 60 Hz the values are to be reduced by 10%.
Mounting arrangement IM B3
Motor
size
71
80
90
100
112
132 S_
132 M_
160
180
200
225
250
280 SM_
315 SM_
315 ML_
315 LK__
355 SM_
355 ML_
355 LK_
400 L, LK_
450 L_
1)
20,000 hours
2-pole
FAD
FAZ
N
N
270
270
400
400
450
450
620
620
810
810
980
980
980
980
5240 5240
4660 4660
3050 3050
3440 3440
4180 4180
6200 4250
6180 4200
6050 4050
6000 3950
3050 6850
2900 6700
2850 6650
2150 7150
1800 6800
4-pole
FAD
N
350
510
560
780
1020
1220
1210
5230
4950
3850
4340
5260
8000
9400
9250
9100
8600
8360
8200
7100
7600
FAZ
N
350
510
560
780
1020
1220
1210
5230
4950
3850
4340
5260
6000
7400
7250
7150
12400
12150
12000
13100
13500
FAD
6-pole
FAD
N
440
590
640
890
1170
1400
1400
5220
5200
4400
4960
6020
7250
10900
10650
10500
10550
10100
9900
8850
9000
FAZ
N
440
590
640
890
1170
1400
1400
5220
5200
4400
4960
6020
9250
8900
8650
8500
14350
13900
13700
14850
15000
8-pole
FAD
N
5240
5370
4850
5460
6630
10300
12000
11500
11750
12200
12000
11450
10450
10800
4-pole
FAD
FAZ
N
N
6-pole
FAD
FAZ
N
N
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
4650
4250
2430
2730
3320
4900
4850
4750
4650
1750
1600
1550
4650
4250
2430
2730
3320
2900
2850
2750
2650
5550
5400
5350
5800
5500
4630
4500
3050
3440
4180
6250
7250
7100
7000
5900
5650
5450
4300
4500
4630
4500
3050
3440
4180
4250
5250
5100
5000
9700
9450
9250
10300
10500
4630
4710
3500
3940
4780
7150
8350
8100
7950
7300
6900
6700
5500
5600
1)
)
4630
4710
3500
3940
4780
5150
6350
6100
5950
11100
10700
10500
11500
11500
1)
1)
8-pole
FAD
N
4740
4850
3850
4340
5260
7950
9200
8900
8900
8550
7300
7800
6750
7000
FAZ
N
4740
4850
3850
4340
5260
5950
7000
6800
6900
12350
11000
11600
12750
12900
8-pole
FAD
N
5180
5450
4720
5400
6680
9850
12450
13600
14100
13600
17000
17500
16450
23700
FAZ
N
4310
4280
2980
3270
3840
4700
5000
3400
3450
8900
7600
5000
4700
1350
FAD
Mounting arrangement IM V1
1)
FAZ
N
5240
5370
4850
5460
6630
8300
10000
9900
9750
16000
15800
15250
16450
16800
40,000 hours
2-pole
FAD
FAZ
N
N
FAZ
On request
Motor
size
71
80
90
100
112
132 S_
132 M_
160
180
200
225
250
280 SM_
315 SM_
315 ML_
315 LK__
355 SM_
355 ML_
355 LK_
400 L, LK_
450 L_
FAZ
20,000 hours
2-pole
FAD
FAZ
N
N
290
260
430
390
480
420
680
580
890
760
1100 910
1100 910
5540 4940
5040 4320
3600 2500
4140 2740
5020 3330
7550 3150
7950 2600
8650 2300
9100 1350
6350 4250
7100 3700
7500 3150
8650 2150
11500 1)
4-pole
FAD
N
380
540
610
880
1140
1390
1430
5560
5470
4580
5230
6380
9600
11750
12500
13100
13250
14600
15650
16050
20000
FAZ
N
330
490
520
740
950
1120
1080
4960
4500
3120
3440
4150
4550
5500
5050
3850
8600
7950
6600
6400
4400
6-pole
FAD
N
460
620
700
990
1280
1580
1680
5540
5810
5280
6030
7440
11150
13600
14900
15700
15650
18050
19100
18450
26000
FAZ
N
420
560
600
840
1100
1300
1260
4900
4630
3530
3900
4610
5500
6300
5800
4100
9580
8600
7050
6750
3700
8-pole
FAD
N
5540
5970
5720
6530
8050
12200
15350
15400
16900
17350
21100
21200
20100
27800
FAZ
N
4900
4810
3980
4400
5210
7000
7900
6300
6300
12500
11650
8700
8350
5500
40,000 hours
2-pole
FAD
FAZ
N
N
4-pole
FAD
FAZ
N
N
6-pole
FAD
FAZ
N
N
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
1)
4940
4630
2970
3430
4160
6200
6600
7300
7750
4950
5750
6150
7220
10000
4370
3920
1870
2030
2470
1800
1300
4950
4990
3780
4330
5290
7800
9550
10300
10900
10450
11850
12850
13150
17700
4290
4050
2320
2550
3060
2750
3300
2900
1700
5850
5150
3800
3400
1200
5180
5320
4370
5010
6200
9000
11050
12350
13100
12350
14700
15800
15100
22200
4310
4140
2620
2870
3360
3350
3750
3250
1550
6270
5300
3750
3400
1)
1)
2900
2350
1800
1)
1)
1)
On request
ABB/ LV Motors/ Cat. BU/ Process performance motors / LV Cast iron GB 03-2005
23
2
LV Process performance cast iron motors
Technical data for totally enclosed squirrel
cage three phase motors
IP 55 – IC 411 – Insulation class F, temperature rise class B
Output
kW
Motor type
Speed
r/min
EffiPower
ciency factor
%
cos ϕ
750 r/min = 8-poles
380 V 50 Hz
4
5.5
7.5
11
15
18.5
22
30
37
45
55
75
90
110
132
160
200
250
315
315
315
355
355
400
400
450
500
560
630
710
705
710
715
735
730
730
735
740
740
741
740
740
739
743
743
742
741
741
743
743
742
742
743
743
743
744
744
744
2)
1)
3)
2)
2) 3)
2)
2) 3)
2)
2)
2)
1)
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
160 MA
160 M
160 L
180 L
200 MLA
225 SMA
225 SMB
250 SMA
280 SMA
280 SMB
315 SMA
315 SMB
315 SMC
315 MLA
355 SMA
355 SMB
355 SMC
355 MLB
355 LKB
400 LA
400 LKA
400 LB
400 LKB
400 LC
400 LKC
450 LA
450 LB
450 LC
450 LD
750 r/min = 8-poles
8.5
15
18.5
30
37
55
132
150
160
1)
1)
1)
2)
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
M3BP
160 LB
180 LB
200 MLB
225 SMC
250 SMB
280 SMC
315 LKA
315 LKB
315 LKC
83.5
84.0
85.7
89.0
91.0
91.0
91.0
92.6
93.4
93.9
93.9
94.2
94.6
94.9
95.4
95.5
95.6
95.6
95.7
96.4
96.4
96.3
96.3
96.5
96.5
96.2
96.3
96.5
96.6
Current
Speed
IN
A
r/min
84.6
88.1
91.2
91.5
92.5
94.2
95.0
95.2
95.2
Power
factor
cos ϕ
Current
IN
A
Moment
Sound
of inertia
pressure
J=1/4 GD2 Weight level LP
kgm2
kg
dB(A)
0.66
0.68
0.68
0.75
0.79
0.76
0.76
0.77
0.76
0.75
0.79
0.81
0.81
0.81
0.78
0.78
0.78
0.78
0.78
0.79
0.79
0.81
0.81
0.80
0.80
0.81
0.81
0.81
0.81
9.9
13.3
17.8
23
29
36
44
58
73
89
103
137
164
198
247
300
373
468
590
580
580
630
630
720
720
800
890
995
1120
0.072
0.091
0.131
0.224
0.45
0.61
0.68
1.25
1.85
2.2
3.2
4.1
4.9
5.8
7.9
9.7
11.3
13.5
16.5
17
17
21
21
24
24
26
29
35
41
0.68
0.74
0.79
0.77
0.81
0.78
0.82
0.82
0.82
20.5
32
35
63
73
104
238
270
285
0.131
0.24
0.54
0.8
1.52
2.85
7.3
8.3
9.2
415 V 50 Hz
0.71
0.72
0.72
0.77
0.83
0.79
0.81
0.81
0.80
0.80
0.83
0.83
0.84
0.84
0.82
0.82
0.81
0.81
0.81
0.82
0.82
0.83
0.83
0.83
0.83
0.83
0.83
0.83
0.83
10.2
13.8
18.6
24.5
30
39
47
61
75
91
108
147
173
210
257
310
398
490
625
608
608
680
680
765
765
855
950
1060
1190
720
715
715
720
740
735
735
740
742
742
743
742
742
741
745
745
744
743
743
744
744
744
744
744
744
745
745
745
745
0.73
0.78
0.83
0.80
0.82
0.82
0.84
0.84
0.84
21.5
33.5
37
65
77
108
251
287
305
705
720
735
735
735
742
741
741
741
380 V 50 Hz
695
715
735
730
735
739
739
739
738
Efficiency
%
84.1
85.0
86.6
89.8
91.2
91.3
91.7
92.7
93.4
94.0
94.1
94.4
94.8
95.0
95.5
95.6
95.7
95.9
95.8
96.4
96.4
96.5
96.5
96.6
96.6
96.4
96.5
96.6
96.7
Basic design
415 V 50 Hz
ABB/ LV Motors/ Cat. BU/ Process performance motors / LV Cast iron GB 03-2005
85.3
89.1
91.6
91.6
92.8
94.4
95.2
95.3
95.4
100
113
126
177
250
305
320
415
605
645
830
930
1000
1150
1520
1680
1820
2180
2600
2900
2900
3200
3200
3400
3400
3750
4000
4350
4800
59
59
59
59
60
63
63
63
65
65
62
62
64
72
69
69
69
72
75
71
71
71
71
71
71
82
82
82
82
2
High-output design
128
185
275
345
460
725
1410
1520
1600
62
62
60
63
63
65
74
74
75
33
LV Process performance cast iron motors
Sizes 355-450
Dimension drawings
Foot-mounted: IM B3 (IM 1001), IM B6 (IM 1051), IM B7 (IM 1061), IM B8 (IM 1071),
IM V5 (IM 1011), IM V6 (IM 1031)
2
Motor
Poles A
size
355 SM_ 2
610
4-12 610
355 ML_ 2
610
4-12 610
355 LK_4) 2
610
4-12 610
400 L_
2
710
4-12 710
400 LK_4) 2
686
4-12 686
450 L_
2
800
4-12 800
AA
AB
AC
AD1) AD2) B
B’
B’’
BA
BB
C
CA
CA’
CA’’
D
DA
DB
DC
E
EA
EG EH
120
120
120
120
120
120
150
150
150
150
160
160
700
700
700
700
700
700
840
840
840
840
950
950
746
746
746
746
746
746
834
834
834
834
966
966
604
604
604
604
604
604
-
560
560
630
630
710
710
1000
1000
800
800
1120
1120
900
900
900
900
1250
1250
221
221
267
267
447
447
410
410
410
410
450
450
722
722
827
827
1077
1077
1156
1156
1156
1156
1420
1420
254
254
254
254
254
254
224
224
280
280
250
250
525
525
500
500
750
750
567
567
701
701
737
465
465
570
570
670
670
467
467
611
611
617
480
480
511
511
487
70
100
70
100
70
100
80
110
80
100
80
120
70
90
70
90
70
90
70
90
70
90
100
M20
M24
M20
M24
M20
M24
M20
M24
M20
M24
M20
M24
M20
M24
M20
M24
M20
M24
M20
M24
M20
M24
M24
140
210
140
210
140
210
170
210
170
210
170
210
140
170
140
170
140
170
140
170
140
170
210
42
51
42
51
42
51
42
50
42
50
42
50
HD1)
top-m.
944
944
944
944
944
944
-
HD2)
top.m.
958
958
958
958
958
958
1045
1045
1045
1045
1169
1169
HD3)
top.m.
1231
1231
HD
side-m.
843
843
843
843
843
843
943
943
943
943
-
K
L
LC
1409
1479
1514
1584
1764
1834
1851
1891
1851
1891
2147
2187
1559
1659
1664
1764
1914
2014
2001
2071
2001
2071
2407
LD
side-m.
679
750
732
802
857
927
909
949
909
949
-
O
35
35
35
35
35
35
35
35
35
35
42
42
LD
top-m.
397
467
397
467
397
467
458
498
458
498
485
525
618
618
618
618
618
618
660
660
660
660
-
500
500
560
560
630
630
900
900
710
710
1000
1000
Motor
Poles F
size
355 SM_ 2
20
4-12 28
355 ML_ 2
20
4-12 28
355 LK_4) 2
20
4-12 28
400 L_
2
22
4-12 28
400 LK_4) 2
22
4-12 28
450 L_
2
22
4-12 32
FA
G
GA
GB GC GD
GF
H
HA HC
20
25
20
25
20
25
20
25
20
25
28
62.5
90
62.5
90
62.5
90
71
90
71
90
71
109
74.5
106
74.5
106
74.5
106
85
116
85
106
85
127
62.5
81
62.5
81
62.5
81
67.5
81
67.5
81
100
12
14
12
14
12
14
12
14
12
14
16
355
355
355
355
355
355
400
400
400
400
450
450
52
52
52
52
52
52
45
45
45
45
46
46
Tolerances:
A, B
± 0,8
D, DA ISO m6
F, FA ISO h9
H
+0 -1.0
N
ISO j6
C, CA ± 0.8
74.5
95
74.5
95
74.5
95
79.5
95
79.5
95
116
1)
2)
3)
4)
12
16
12
16
12
16
12
16
14
16
14
18
725
725
725
725
725
725
814
814
814
814
933
933
Terminal box 370
Terminal box 750
Terminal box 1200
Size with alternative dimensions
40
51
40
51
40
51
40
51
40
51
50
130
130
130
130
130
130
150
150
150
150
180
180
Above table gives the main dimensions in mm.
For detailed drawings please see our web-pages 'www.
abb.com/motors&drives' or contact us.
ABB/ LV Motors/ Cat. BU/ Process performance motors / LV Cast iron GB 03-2005
55
Accessories
Slide rails for motor sizes 280 to 450
2
Type
Motor
M
M2
M3
size
W
X
X1
max
X2
X3
X5
X6
Y
Y1
Y2
Y3
max min
Weight/
rail kg
ZHKJ 50
280
28
25
20
135
850
150
125
135
200
900
50
100
80
50
ZHKJ 63
315
28
25
20
220
1040 150
125
150
200
1090 50
100
80
50
17.5
ZHKJ 71 1)
355
33
30
20
275
1260 190
145
185
240
1320 60
140
120
50
31.0
ZHKJ 71 1)
400
33
30
20
180
1260 190
140
200
240
1320 60
140
120
50
31.0
ZHKJ 90
450
28
30
28
260
1420 240
140
210
300
1480 70
180
158
60
61.0
1)
14.5
When mounting on a ceiling or on a wall please contact the manufacturer.
Each set includes two complete slide rails including screw for
mounting the motor on the rails. Screws for mounting the rails
on the foundation are not included. Slide rails are supplied with
unmachined lower surfaces and should, prior to tightening
down, be supported in a suitable manner.
ABB/ LV Motors/ Cat. BU/ Process performance motors / LV Cast iron GB 03-2005
65
Bibliografía:
[1] Virgil Moring Faires, “Diseño de Elemento de Maquinas”, Editorial Limusa Noriega,
año 2001.
[2] Marks, “Manual del Ingeniero Mecánico”, Editorial Mc Graw Hill, año 2001.
[3] Dubbel, “Manual del constructor de Maquinas”, Editorial Labor, año 1960.
[4] Ing. Mayer Omar E., “Mecánica Aplicada, apuntes”, Universidad de Buenos Aires,
Facultad de Ingeniería, año 2002.
[5] Ing. Salvadeo Roberto, “Mecánica Aplicada, apuntes”, Universidad Nacional del
Cuyo, Facultad de Ingeniería, año 2000.
[6] Ing. González Rey G., García Toll, Cardenas Ortiz, “Elementos de maquinas, apuntes”,
Instituto Superior Politécnico José Antonio Echeverría CUJAE, La Habana Cuba, año
2000.
[7] Ing. Biscardi Horacio, “Elementos de Maquinas, apuntes”, UTN FRBA, editorial CEIT,
año 2006.
[8] Goodyear, “Manual Correas Multi – V, Green - Seal”, año 1998.
[9] SKF, “Manual y catalogo de Selección de Rodamientos”, año 1989.
ANEXO correas: VALOR DE fa (Coeficiente combinado de fricción y acuñamiento)
La siguiente figura representa la sección transversal de una correa de sección transversal trapecial o correa
en “V”, de uso muy común en transmisiones de potencia mecánica de “bajo” valor, introducida en el
correspondiente “canal” practicado en la periferia de la polea. Nótese que la correa hace y debe hacer
contacto con sus FLANCOS LATERALES con los respectivos flancos laterales del canal de la polea y NO con
su cara interior sobre el fondo del canal de la polea; si esto último sucediera, la correa actuaría como una
correa plana, no siendo este su objetivo.
El sistema equivalente a la reacción diferencial dF de la polea sobre la correa resulta formado por dos
fuerzas diferenciales normales dN a ambos flancos y dos fuerzas diferenciales de fricción f * dN
(tangenciales a los mismos flancos y en consecuencia normales a dN), siendo f ( no fa ), el coeficiente de
fricción entre correa y polea.
Atendiendo a esta equivalencia, el valor de dF, resulta:
dF = 2 * dN * sen (γ/2) + 2 * f * dN * cos (γ/2)
dF = 2 * dN * [ sen (γ/2) + f * cos (γ/2) ]
Longitudinalmente (circunferencialmente) (ver esquema siguiente) y por actuar en dicha dirección y en
cada flanco únicamente f * dN, haber “tratado” anteriormente con fa * dF y ser 2 (dos) la cantidad de
flancos, resulta:
fa * dF = 2 * f * dN
luego:
2 * fa * dN * [ sen (γ / 2) + f * cos (γ / 2) ] = 2 * f * dN
operando:
donde:
fa = Coeficiente combinado de fricción y acuñamiento
f = Coeficiente de fricción
γ = Ángulo del canal de la polea (de acuñamiento).
Con 0 ≤ f (fa) ≤ μ (μa)
y recordando que:
sen [ϕ + (γ/2)] = [sen (γ/2)] * [cos (ϕ)] + [sen (ϕ)] * [ cos (γ/2)]
resulta:
ANEXO 2 Correas: ESFUERZOS EN LOS RAMALES DE LA CORREA
Para que el sistema pueda transmitir potencia resulta imprescindible que exista un efectivo contacto
entre correa y poleas, única manera de que se engendre la fricción necesaria entre dichos elementos.
Así las cosas, la polea motora arrastra a la correa y esta a la polea conducida. Tal contacto
necesario se asegura si ambos ramales de la correa ejercen una cierta fuerza Q (presión) sobre las
poleas y a su vez estas sobre la correa, y que correspondientemente estén traccionados, tanto en
estado de reposo como en estado de movimiento.
Al esfuerzo existente en ambos ramales de la correa, graduable el mismo regulando la distancia
entre los centros de ambas poleas, y estando en estado de reposo el sistema se lo denomina
Esfuerzo de Montura T0 y su valor es el mismo para la totalidad de las secciones transversales
de ambos ramales (sistema en estado de reposo).
Ramal conducido
Pt1
T2
ω1
ω2
O2
O1
Q
Pt2
Q
T1
Ramal motor o conductor
Polea motora
Polea conducida
Llámese ramal conductor o motor a aquel que en el sentido de la marcha del sistema, “sale” de la
polea conducida y “entra” en la motora (así las cosas, la polea motora “arrastra” a la correa y esta
a la conducida, verificándose un arrastre indirecto de la polea conducida por la motora) y ramal
conducido a aquel que “sale” de la polea motora y “entra” en la conducida.
Durante el movimiento y habiendo transmisión de potencia, existen Pt1 y Pt2 y los esfuerzos T1 y
T2 en los ramales motor y conducido respectivamente de la correa.
Con la condición de que el par de esfuerzos T1 – T2 se mantenga dentro de la admisibilidad
correspondiente de la correa, el equilibrio de la correa, exige:
Sin resbalamiento:
Pt1 = T1 – T2
Pt2 = T1 – T2
Pt1 = Pt2
Con resbalamiento:
Pt1 > T1 -- T2
Pt2 < T1 -- T2
Pt1 > Pt2
Puesto en análisis el equilibrio de un elemento diferencial de correa sobre una de las poleas, resulta
de considerar los esfuerzos actuantes en juego sobre el mismo.
Representándose en la FIGURA 01 siguiente la polea pequeña (la que en cualquier transmisión
(reductora o multiplicadora de velocidad) resulta con el menor ángulo α de contacto) y
subindicando con p las características inherentes a la polea pequeña y con g las inherentes a la
grande, en la figura resulta:
X, Y
= Par de ejes coordenados de referencia.
αp =
Ángulo total de contacto que se verifica entre la polea y la correa, a
considerar siempre positivo.
θr
= (Nº π -- αpr ) / 2 (a considerar siempre positivo)
ε
= Distancia angular genérica, referida al eje X, en la cual se analiza un
elemento diferencial de correa.
T1 = Esfuerzo en el ramal motor de la correa.
T2 = Esfuerzo en el ramal conducido de la correa.
Rpp = Radio primitivo polea pequeña.
FIGURA 01
Elemento diferencial
de correa a analizar
Y
αp
ε
T1
Ramal
motor
T2
θ
X
Op
Ramal
conducido
Rpp
θ
θ
T2
T1
Y
dPt=fap*dF
dF
T+dT
dε
Rp
p
T
FIGURA 02
Op
X
La FIGURA 02 anterior representa un elemento diferencial de la correa y los esfuerzos a los
cuales se encuentra sometido, sin considerar la fuerza centrípeta por cambio de la dirección del
movimiento del mismo. En ella:
T
= Esfuerzo (tracción) genérico actuante sobre el elemento diferencial de
correa.
dT
= Diferencial de esfuerzo actuante sobre el elemento diferencial de correa (las
secciones de la correa durante su paso por las poleas ven variar el
esfuerzo al que están sometidas; por la polea motora el esfuerzo disminuye
de T1 a T2 y por la polea conducida aumenta de T2 a T1)
dF
= Diferencial de fuerza con que la polea actúa sobre la correa de manera
normal a la misma en la superficie de contacto entre ambas.
dPt
= Diferencial de fuerza tangencial de fricción con que la polea actúa sobre la
correa, independiente del sentido de rotación. El sentido de dPt está dado
por la ubicación de los ramales T1 y T2 de la correa.
fap
= Coeficiente combinado de fricción y acuñamiento (correas de sección
trapecial) entre correa y polea pequeña, dependiente al menos de la
naturaleza de las superficies en contacto y de la carga que la solicita
(dPt).
Proyectando sobre los ejes X e Y, se obtiene:
Sobre eje X:
T * cos(dε/2) + fap * dF = (T + dT) * cos(dε/2)
fap * dF
Sobre eje Y:
=
dT
⇒
dF
=
dT
---fap
T * sen (dε/2) + (T + dT) * sen (dε/2) = dF
Sí sen (dε / 2) = dε / 2 ;;;; dT * dε = 0 (dε y dT infinitesimales)
2 * T * (dε / 2) = dF
dF
=
dT
---fap
=
T * dε
⇒
dT
---T
=
fap * dε
Integrando entre θ y ε, resulta la función T (función del ángulo genérico ε) como esfuerzo de
tracción genérico al cual se encuentra sometida la correa a lo largo de su contacto con la polea, e
integrando entre 0 y αp, el esfuerzo T1 de tracción con que la correa sale de la polea motora y
entra en la polea conducida.
⌠ T
ε
⌠
⎮ dT / T = ⎮
fap * dε ⇒ ln (T) -- ln (T2) = fap * (ε -- θ)
⌡ θ
⌡ T2
ln
⎡
⎢
T
---
⎤
⎥
⎣
T2
⎦
=
fap * (ε -- θ)
⇒
T
---
=
e^(fap*(ε--θ))
T2
T = T2 * e^(fap*(ε--θ))
Análogamente
T1 = T2 * e^(fap*αp)
Resultando válido el razonamiento expuesto para la polea grande (subíndice g) y teniendo T1 y
T2 los mismos valores, tanto para la misma como para la polea pequeña (subíndice p), se tiene:
T1 = T2 * e^(fap*αp) = T2 * e^(fag * αg)
RELACIÓN ENTRE LOS PARES DE VALORES
f´; α DE AMBAS POLEAS
De la expresión inmediatamente anterior:
e^(fap * αp) = e^(fag * αg) ⇒ fap * αp = fag * αg
Como αg ≥ αp (αg ≥ 180º, αp ≤ 180º),
de la igualdad anterior resulta fap ≥ fag
Así las cosas, la polea grande trabaja con un coeficiente combinado de fricción
y acuñamiento menor que la polea pequeña.
constante
motor
trifasico
acoplamiento
ventilador
centrifugo