1.Práctica - Universidad Pública de Navarra
Anuncio

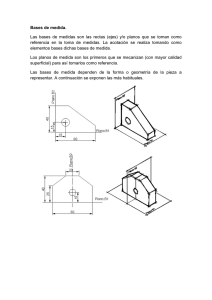
Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa 1. Práctica 1.1.Introducción La Mecánica es la rama del análisis científico que se ocupa de los movimientos, el tiempo y las fuerzas, y se divide en dos partes, estática y dinámica. La Estática trata del análisis de sistemas estacionarios, es decir, aquellos en que el tiempo no es un factor determinante, y la Dinámica se refiere a los sistemas que cambian con el tiempo. La dinámica está constituida por dos disciplinas generales. Estos dos aspectos de la dinámica se conocen como Cinemática y Cinética que se ocupan, respectivamente, del movimiento y de las fuerzas que lo producen. Esta práctica es una introducción a la teoría de mecanismos. En ella se ven algunos de los mecanismos más usuales así como sus aplicaciones en la vida real. Mecanismo se define como toda cadena cinemática cerrada en la que, al comunicar un movimiento dado a uno o varios eslabones independientes, según los grados de libertad de la misma, los restantes eslabones ejecutan movimientos completamente determinados. También puede ser definido como una combinación de cuerpos resistentes conectados por medio de articulaciones móviles para formar una cadena cinemática cerrada con un eslabón fijo, cuyo propósito es transformar el movimiento. Estas definiciones pueden ser contrastadas con el término estructura, que es también combinación de cuerpos (rígidos) resistentes conectados por medio de articulaciones, pero cuyo propósito no es efectuar un trabajo ni transformar un movimiento. Una estructura carece de movilidad interna, no tiene movimientos relativos entre sus miembros, mientras que los mecanismos los tienen. El propósito real de un mecanismo es aprovechar estos movimientos internos relativos para transformar el movimiento. El término estructura es a la estática lo que el término mecanismo a la cinemática. Práctica 1 ESTUDIO DE MECANISMOS PLANOS Pag 1 Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa Se utilizará la palabra eslabón para designar a un componente de un mecanismo. Se supone que un eslabón es completamente rígido. Los eslabones de un mecanismo se deben conectar entre sí de una manera tal que transmitan movimiento del impulsor, o eslabón de entrada, al seguidor, o eslabón de salida. Estas conexiones se llaman pares cinemáticos (o simplemente pares). Los mecanismos se pueden clasificar de diversas maneras, y una de estas maneras los distingue basándose en las características de los movimientos de los eslabones, dividiendo los mecanismos en planos, esféricos y espaciales. Un mecanismo plano es aquel que todas las partículas describen curvas planas en el espacio y todas se encuentran en planos paralelos, es decir, los lugares geométricos de todos los puntos son curvas planas paralelas a un solo plano común. Esto hace posible que el lugar geométrico de cualquier punto elegido de un mecanismo plano se presente con su verdadero tamaño y forma real, en un solo dibujo o una sola forma. Mecanismo esférico es aquel en el que el lugar geométrico de cada punto es una curva contenida dentro de una superficie esférica y las superficies esféricas definidas por varios puntos arbitrarios elegidos son concéntricas. Los mecanismos espaciales no incluyen restricción alguna en los movimientos relativos de las partículas. Los mecanismos planos y esféricos son casos especiales de mecanismos espaciales, pero se tratan por separado ya que es posible hacer multitud de simplificaciones en su diseño y análisis. En esta práctica se estudiarán mecanismos planos ya que se pueden observar los movimientos de todas sus partículas en el tamaño y forma reales, desde una sola dirección, o lo que es lo mismo, se pueden representar gráficamente todos los movimientos en una sola perspectiva. Esto permite que las técnicas gráficas sean muy apropiadas para su solución. Los mecanismos que se ven durante la práctica son (ver figuras más adelante): 1. biela - manivela. 2. salida armónica. 3. retorno rápido. 4. retorno rápido (Whitworth). 5. cuadrilátero articulado. Práctica 1 ESTUDIO DE MECANISMOS PLANOS Pag 2 Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa Práctica 1 ESTUDIO DE MECANISMOS PLANOS Pag 3 Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa 1.2.Desarrollo Teórico Como ya se ha mencionado anteriormente, la cinemática se ocupa del estudio del movimiento, sin tener en cuenta las causas que lo producen. Deberá ser realizado un estudio cinemática de uno de los cinco mecanismos citados. El estudio consistirá en la realización de dos gráficas: - Una de las gráficas será la de desplazamientos de salida. - Otra de las gráficas será la de velocidades de salida. GRÁFICA DE DESPLAZAMIENTOS. Los desplazamientos (Ri) podrán ser leídos directamente sobre los mecanismos. Estas posiciones de la salida deberán ser leídas cada 20º de entrada. Con ellos podremos construir una curva de puntos (función discreta), que representa la posición de la salida del mecanismo en función de la entrada. GRÁFICA DE VELOCIDADES. La velocidad instantánea es la variación en el tiempo de la posición: V = dR dt Para calcular la velocidad instantánea necesitamos una función continua de la posición, y sólo disponemos de una función discreta de dicha posición. Por ello calcularemos la velocidad promedio durante un intervalo, que se define como: Vi = ∆R Ri − Ri −1 = ∆t ∆t Para el calculo de esta velocidad promedio, los desplazamientos serán conocidos (los medidos para la primera gráfica), y el intervalo de tiempo será función de la velocidad angular de entrada. La velocidad angular de la entrada ha considerar será de 10 r.p.m.. El intervalo de tiempo será entonces el tiempo que tarda la entrada en recorrer los 20º del intervalo de medición de posiciones, si la velocidad angular es la mencionada. Práctica 1 ESTUDIO DE MECANISMOS PLANOS Pag 4 Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa Además de esto, se estudiarán los siguientes conceptos: Ventaja Mecánica Posición de Volquete Bloqueo del mecanismo Bifurcaciones 1.3.Realización Práctica La realización de la práctica consistirá en el estudio de los mecanismos previamente descritos, para los cuales se deberá realizar lo siguiente: a) Estudio de la movilidad y realización de diagramas esquemáticos de los mecanismos estudiados b) De alguno de los mecanismos, tomar datos y rellenar la columna de desplazamientos de la tabla de resultados adjunta. Nombre del mecanismo: Velocidad angular de entrada: TABLA DE RESULTADOS Ángulo de Entrada Unidades: Grados 0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 Práctica 1 Desplazamiento del pistón o ángulo de salida (según el caso). Unidades: Velocidad del pistón o velocidad angular de salida (según el caso). Unidades: ESTUDIO DE MECANISMOS PLANOS Pag 5 Prácticas de Universidad Pública de Navarra TEORÍA DE MÁQUINAS Nafarroako Unibertsitate Publikoa c) Estudio de la Ventaja Mecánica, la Posición de Volquete, posición de Bloqueo y la Bifurcación en el cuadrilátero articulado estudiado. d) Estudio de la Ventaja Mecánica, la Posición de Volquete, posición de Bloqueo y la Bifurcación en el mecanismo estudiado. 1.4.Resultados a entregar Se deberá entregar un guión de la práctica (A ORDENADOR NECESARIAMENTE), en la práctica de la semana siguiente a ésta, con los resultados a las siguientes cuestiones: 1. Calcular la movilidad y hacer un diagrama esquemático de cada mecanismo. 2. Tablas y gráficas de desplazamientos y velocidades de los mecanismos estudiados (ambas cosas se deberán realizar mediante EXCEL). 3. Buscar otra forma de hallar la velocidad a partir de los valores de desplazamiento obtenidos, explicarla y realizar una nueva gráfica de velocidades de esta nueva manera. 4. Explicar qué es la ventaja mecánica, la posición de volquete y el bloqueo. ¿En qué posiciones del mecanismo se han dado los valores límites de la ventaja mecánica? Hacer un diagrama esquemático de dichas posiciones y relacionar a su vez esto con los conceptos de posición de volquete y bloqueo. 5. Explicar qué es una bifurcación y cuándo se da en los mecanismos estudiados. Hacer diagramas para ilustrar la explicación. 6. Buscar aplicaciones en la vida real de cada uno de los distintos mecanismos estudiados. Práctica 1 ESTUDIO DE MECANISMOS PLANOS Pag 6